Embed Size (px)
Citation preview
7/31/2019 MECATRONICA PROYECTO
http://slidepdf.com/reader/full/mecatronica-proyecto 1/8
1.-Introducción.
2. Planteamiento del problema.
3. Objetivos.
4. Descripción del proyecto.
4.1 Materiales.
4.2 Software.
4.3 Desarrollo.
4.4 Interfaz.
4.5 Pruebas.
5. Exhibición.
6. Conclusión.
7/31/2019 MECATRONICA PROYECTO
http://slidepdf.com/reader/full/mecatronica-proyecto 2/8
El brazo del robot está compuesto por cinco servo motores uno de ellos(la base) gira en torno a 360g. Este brazo será controlado mediante un PIC
(controlador de interfaz periférico) 16f877A; mediante la interfaz de la PC
a través del programa PIC BASIC el cual además de grabar información
nos servirá para comandar el brazo.
Previo a una investigación realizada en el internet y por
entrevistas a profesionales en la electrónica determinamos
realizar el comando de un brazo robot a través de la PC; deesta forma el problema a resolver es lograr la simbiosis entre
electrónica, programación y mecánica
Se determino que este proyecto era viable pues contábamos
con los recursos humanos, económicos y técnicos. Puesto
que nos consideramos capaces para la realización del mismo.
Controlar un brazo robot compuesto de cuatro motores a
través de la interfaz gráfica de la PC
7/31/2019 MECATRONICA PROYECTO
http://slidepdf.com/reader/full/mecatronica-proyecto 3/8
1. Realizar el circuito electrónico correspondiente para el
control del brazo robot.
2. Programar un PIC utilizando el circuito electrónicoprogramador de pics.
3. Realizar la interfaz grafica de la PC utilizando el programa
Visual Basic
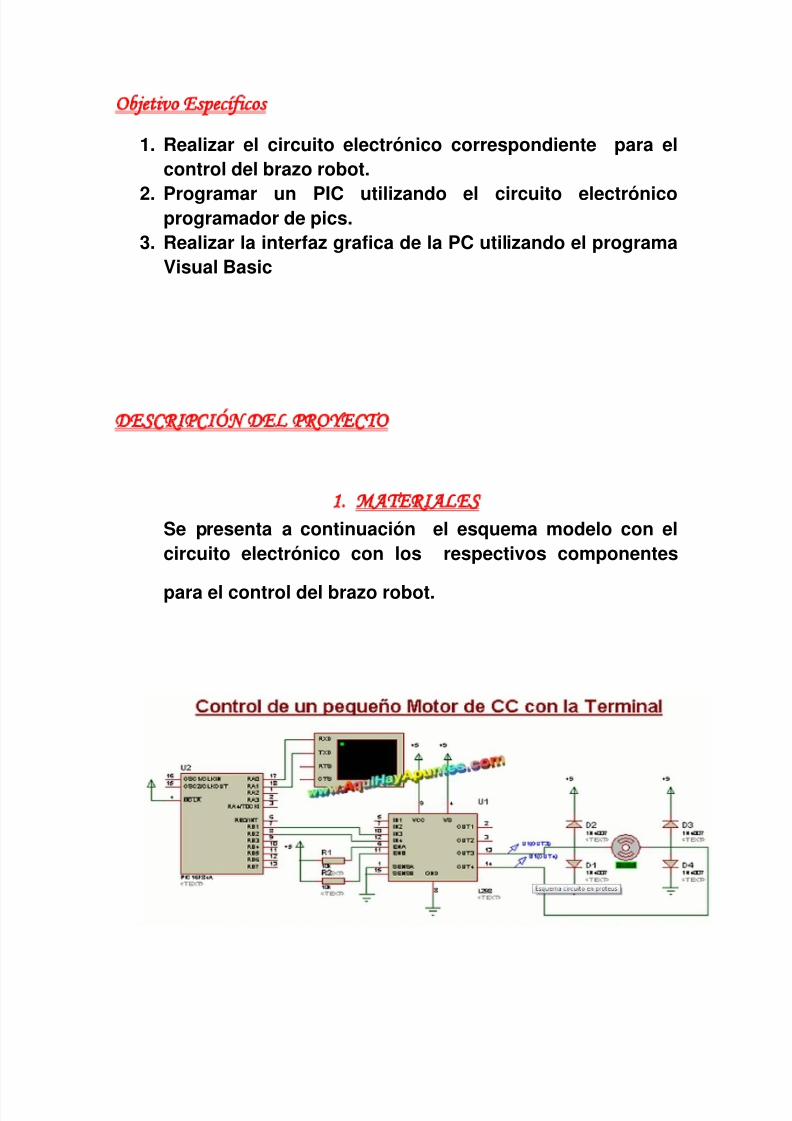
Se presenta a continuación el esquema modelo con el
circuito electrónico con los respectivos componentes
para el control del brazo robot.
7/31/2019 MECATRONICA PROYECTO
http://slidepdf.com/reader/full/mecatronica-proyecto 4/8
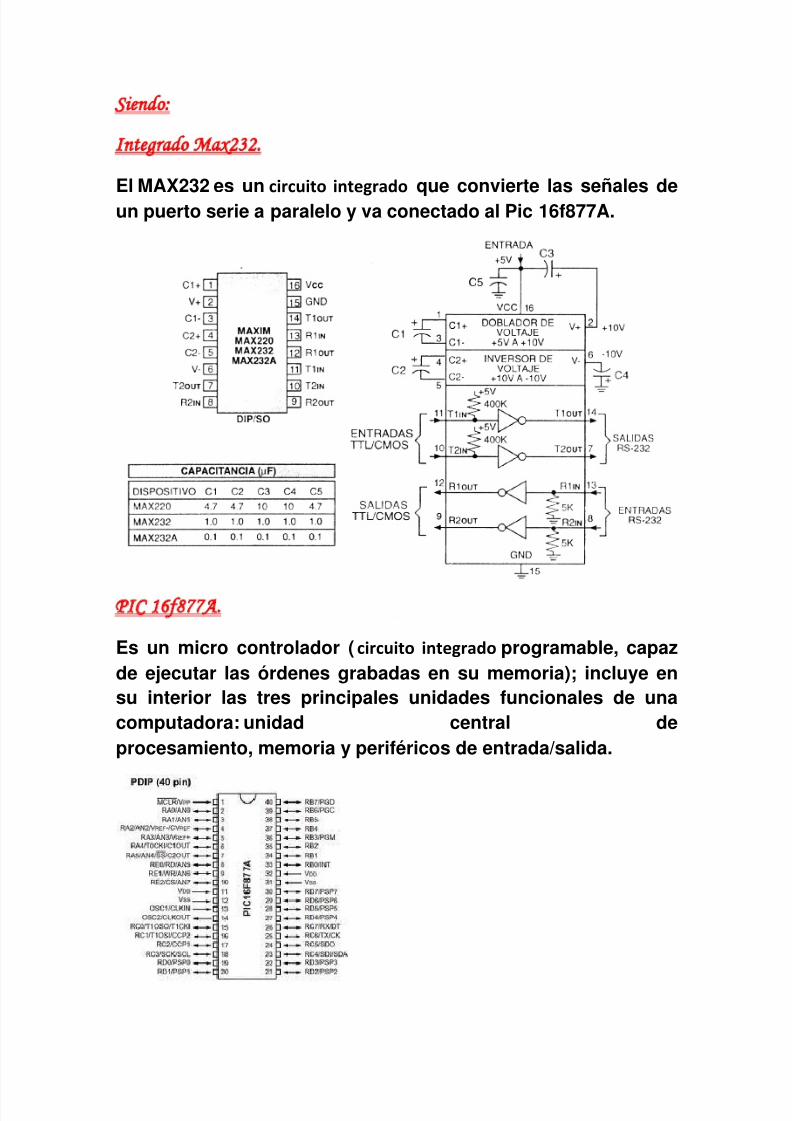
El MAX232 es un circuito integrado que convierte las señales de
un puerto serie a paralelo y va conectado al Pic 16f877A.
Es un micro controlador ( circuito integrado programable, capaz
de ejecutar las órdenes grabadas en su memoria); incluye en
su interior las tres principales unidades funcionales de una
computadora: unidad central de
procesamiento, memoria y periféricos de entrada/salida.
7/31/2019 MECATRONICA PROYECTO
http://slidepdf.com/reader/full/mecatronica-proyecto 5/8
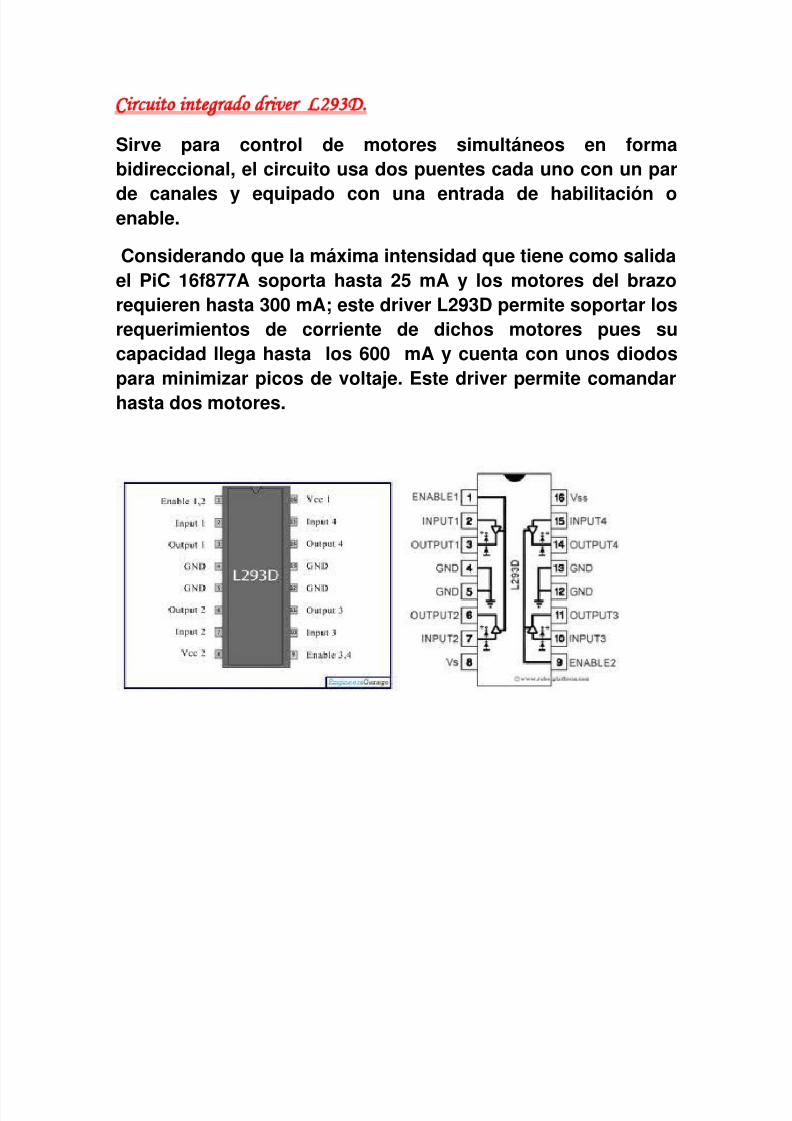
Sirve para control de motores simultáneos en forma
bidireccional, el circuito usa dos puentes cada uno con un par
de canales y equipado con una entrada de habilitación oenable.
Considerando que la máxima intensidad que tiene como salida
el PiC 16f877A soporta hasta 25 mA y los motores del brazo
requieren hasta 300 mA; este driver L293D permite soportar los
requerimientos de corriente de dichos motores pues su
capacidad llega hasta los 600 mA y cuenta con unos diodos
para minimizar picos de voltaje. Este driver permite comandar
hasta dos motores.
7/31/2019 MECATRONICA PROYECTO
http://slidepdf.com/reader/full/mecatronica-proyecto 6/8
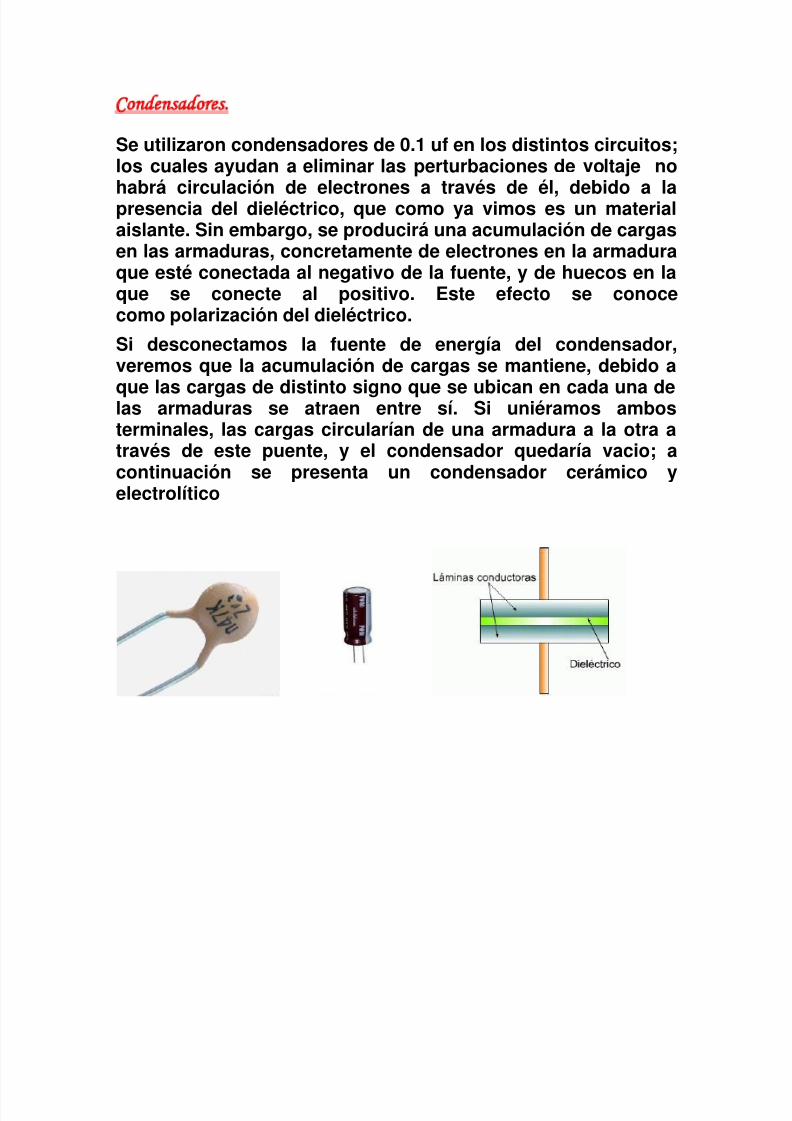
Se utilizaron condensadores de 0.1 uf en los distintos circuitos;los cuales ayudan a eliminar las perturbaciones de voltaje no
habrá circulación de electrones a través de él, debido a lapresencia del dieléctrico, que como ya vimos es un materialaislante. Sin embargo, se producirá una acumulación de cargasen las armaduras, concretamente de electrones en la armaduraque esté conectada al negativo de la fuente, y de huecos en laque se conecte al positivo. Este efecto se conocecomo polarización del dieléctrico.
Si desconectamos la fuente de energía del condensador,veremos que la acumulación de cargas se mantiene, debido a
que las cargas de distinto signo que se ubican en cada una delas armaduras se atraen entre sí. Si uniéramos ambosterminales, las cargas circularían de una armadura a la otra através de este puente, y el condensador quedaría vacio; acontinuación se presenta un condensador cerámico yelectrolítico
7/31/2019 MECATRONICA PROYECTO
http://slidepdf.com/reader/full/mecatronica-proyecto 7/8
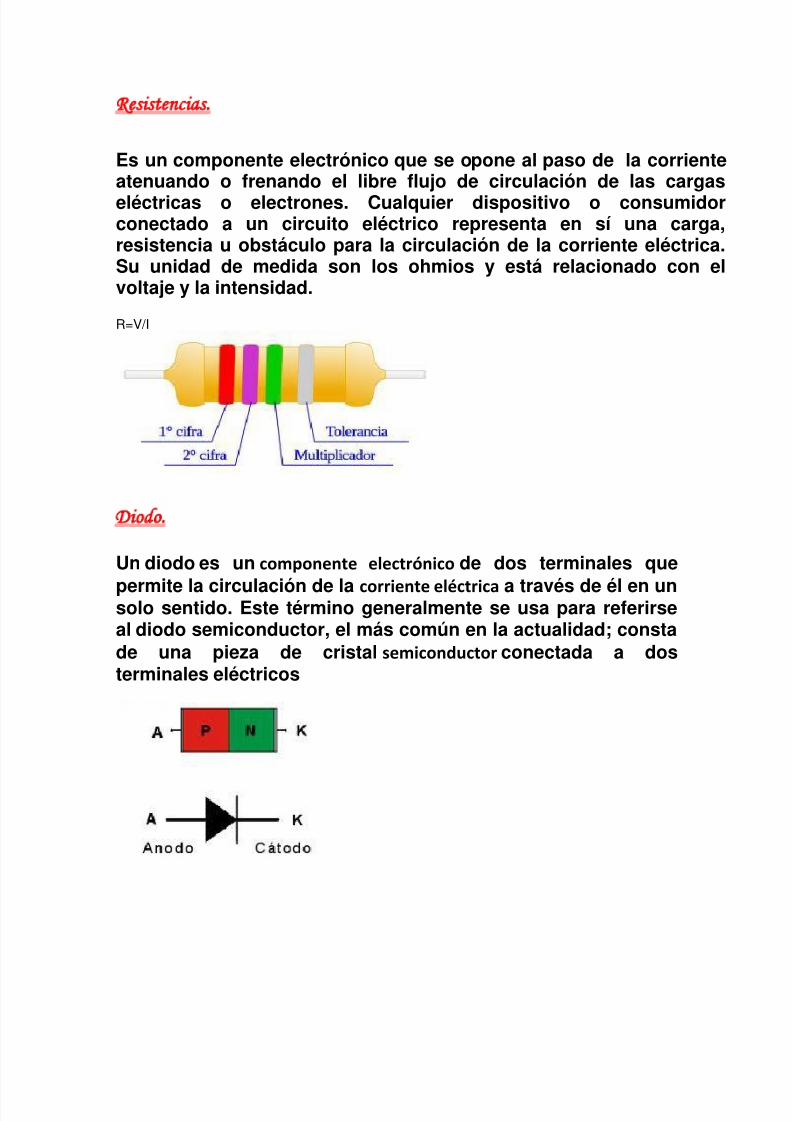
Es un componente electrónico que se opone al paso de la corrienteatenuando o frenando el libre flujo de circulación de las cargas
eléctricas o electrones. Cualquier dispositivo o consumidorconectado a un circuito eléctrico representa en sí una carga,resistencia u obstáculo para la circulación de la corriente eléctrica.Su unidad de medida son los ohmios y está relacionado con elvoltaje y la intensidad.
R=V/I
Un diodo es un componente electrónico de dos terminales que
permite la circulación de la corriente eléctrica a través de él en unsolo sentido. Este término generalmente se usa para referirseal diodo semiconductor, el más común en la actualidad; consta
de una pieza de cristal semiconductor conectada a dosterminales eléctricos

7/31/2019 MECATRONICA PROYECTO
http://slidepdf.com/reader/full/mecatronica-proyecto 8/8