Embed Size (px)
Citation preview
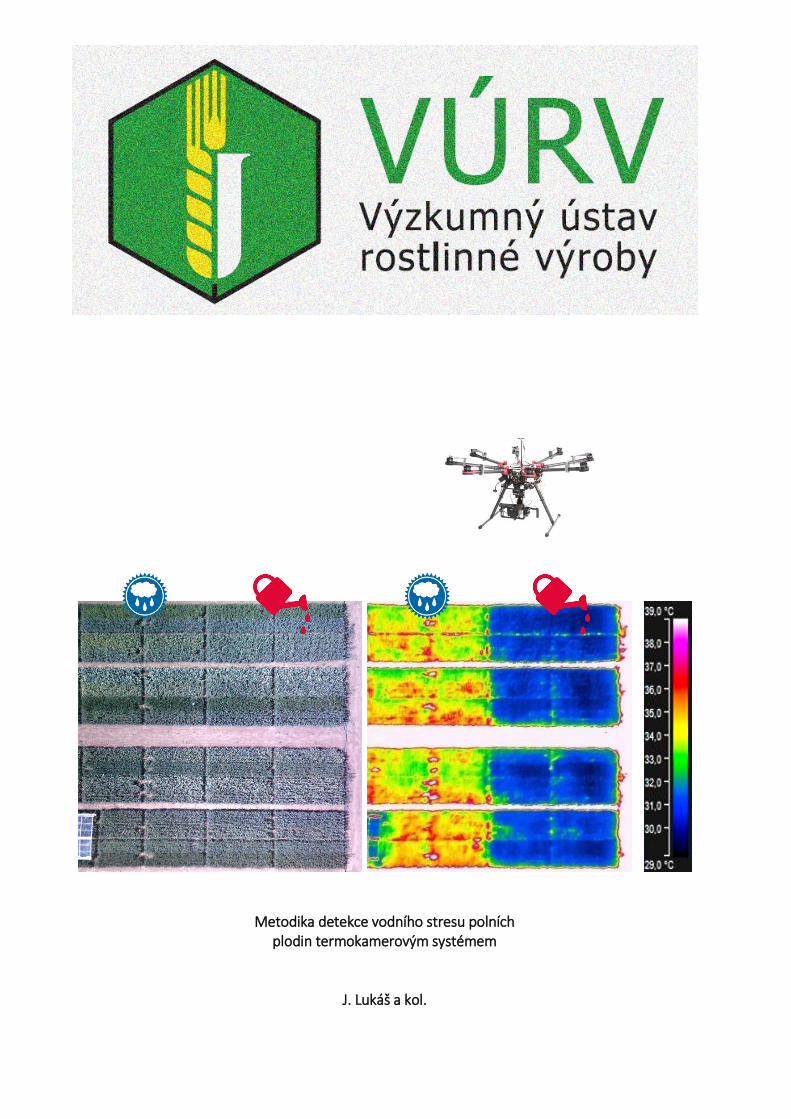
Metodika detekce vodního stresu polních plodin termokamerovým systémem
J. Lukáš a kol.
Certifikovaná metodika pro praxi Výzkumný ústav rostlinné výroby, v.v.i. Praha - Ruzyně
2019
Publikaci bylo Ústředním kontrolním a zkušebním ústavem zemědělským uděleno osvědčení
č. 62067/2019-MZE-18144 ze dne 5.12.2019 o uznání uplatněné certifikované metodiky v souladu
s podmínkami „Metodiky hodnocení výsledků výzkumu a vývoje“. O uplatnění metodiky byla
uzavřena smlouva s Ing. Zdeněk Kvíz, Ph.D. (IČO: 61647055) dne 21.11.2019.
Oponenti Ing. Vojtěch Lukas, Ph.D., Mendelova univerzita v Brně Ing. Michaela Budňáková, Ministerstvo zemědělství ČR Autoři Ing. Jan Lukáš, Ph.D.. , Výzkumný ústav rostlinné výroby, v.v.i.
Ing. Jan Haberle, CSc., Výzkumný ústav rostlinné výroby, v.v.i.
Ing. Jana Chrpová, CSc., Výzkumný ústav rostlinné výroby, v.v.i.
Doc. Ing. Milan Kroulík, Ph.D., Česká zemědělská univerzita v Praze
Doc. Ing. Václav Brant, Ph.D., Česká zemědělská univerzita v Praze
Ing. Jan Sova, Workswell s.r.o.
Ing. Jan Kovář, Workswell s.r.o.
Adam Švestka, MSc., Workswell s.r.o.
Metodika je výsledkem řešení výzkumného projektu
FV10213 „Platforma pro identifikaci a interpretaci stresových faktorů v rostlinné produkci„ (100 %).
© Výzkumný ústav rostlinné výroby, v.v.i., 2019
ISBN 978-80-7427-304-9
I. CÍL METODIKY
Cílem metodiky je popsat způsob využití termokamerového systému neseného
bezpilotním prostředkem pro detekci vodního stresu vybraných polních plodin. Metodika je
určena pro zemědělskou praxi, zejména pak s tím spojené služby, dále může být využita
i ve šlechtění odrůd odolných k nedostatku vody, řízení zavlah, výzkumu a monitorování opatření
spojených s prevencí sucha.
II. VLASTNÍ POPIS METODIKY
Metodika zahrnuje následující části: přehled způsobů spektrální bezkontaktní detekce vodního
stresu, metodiku výpočtu vodního stresového indexu CWSI a metodiku bezpilotního
termografického snímání polních porostů včetně zpracování termálních dat.
Výsledky vycházejí z poznatků získaných při monitorování pokusných ploch s cílenou manipulací
vodního deficitu a provozních ploch, které jsou pravidelně vystaveny nedostatku vláhy v důsledku
přírodních půdních a klimatických podmínek.
1. ÚVOD
Tradiční metody měření vegetačních a fyziologických parametrů rostlin jsou spolehlivé, ale náročné
na přístrojové vybavení, čas a množství pracovníků, přičemž dokáží obsáhnout pouze
limitované/omezené území. Dálkové měření termokamerovým systémem poskytuje přesnější
údaje o vegetačních parametrech než tradiční techniky díky tomu, že jsou data získávána z velkého
spojitého prostoru a je možné je rychle a jednoduše v pravidelných intervalech opakovat. Intenzita
vyzařování (resp. schopnost rostlin vyzařovat, pohlcovat a odrážet tepelné záření) závisí na
vlastnostech listové plochy porostu (orientaci a struktuře povrchu), ovšem množství vyzářené
energie závisí také na pigmentaci listů, jejich tloušťce, uspořádání buněk (struktuře) a na obsahu
vody v tkáni listů.
Zelené listy rostlin vykazují velmi nízkou odrazivost a propustnost ve viditelném spektru záření
(400-700 nm) s ohledem na výraznou absorbanci fotosyntetickými barvivy. Oproti tomu v
infračervené oblasti odrazivost roste, přičemž významnou roli zde hrají vnitřní struktury listu,
uspořádání porostu a nízká absorbance IR záření pigmenty. Spektrální vlastnosti porostů jsou dále
silně ovlivňovány obsahem vody v tkáni listů, kdy s klesajícím obsahem klesá i odrazivost .
Dostupnost vody, resp. zavlažování je nezbytné pro zemědělskou produkci především
v oblastech s nedostatečným nebo nepravidelným množstvím srážek. Studie ukazují, že intenzita
tepelného záření rostlin velmi citlivě reaguje na nedostatek vody. Na tzv. vodní stres reagují rostliny
tak, že se uzavírají průduchy v listech, což se projeví růstem povrchové teploty a tedy i IR záření
emitovaného rostlinou.
2. TRANSPIRACE ROSTLIN
Sledování teploty rostlin je úzce svázáno s vodou. Voda v rostlině prostupuje variabilním
prostředím rostlinných pletiv. Její transport je založen na fyzikálních principech difúze,
hromadného toku a osmózy. Zároveň platí, že rychlost transportu se mění v závislosti na genotypu
a jeho adaptabilitě, typu půdy a povětrnostních podmínkách. Proto hovoříme o komplexu pohybu
vody v systému půda – rostlina - atmosféra. Při měření teplotních změn porostu hrají všechny tři
prvky systému velmi důležitou a specifickou roli a jsou ovlivněny silou „vazby“ vody (tzv. vodním
potenciálem prostředí - rozdíl mezi vodním potenciálem vody v nasycené půdě -30kPa a mezi
atmosférou (-95 MPa) je hnací silou pohybu vody skrze rostlinu). Voda v rostlině zprostředkovává
distribuci živiny a signálních molekul od kořenů do listů. V pletivech listů dochází k přeměně
skupenství: z tekuté formy se voda z parenchymatických a dalších buněk (např. pokožkových)
odpařuje do vnitřního prostoru listu a průduchy se dostává ven. Tomuto procesu se říká
transpirace na rozdíl od evaporace (výpar vody z povrchu půdy). Dohromady těmto procesům
ztrát vody z půdy a rostliny říkáme evapotranspirační ztráty vody. Na úrovni rostliny je transpirace
genotypově specifická – tj. různé odrůdy ztrácí/využívají vodu v čase rozdílně v závislosti na
podmínkách prostředí. S ohledem na vysoké hodnoty měrného výparného tepla vody (energie
potřebná na oddělení molekul vody z kapalné do plynné fáze) jsou rostliny schopny i v extrémních
podmínkách udržet teplotní optimum svých pletiv. Pokud tedy rostlina transpiruje, vypařená voda
odvádí také teplo zevnitř a z povrchu listů, a ochlazuje je pod úroveň okolí. Nedostatek vody v
půdě sníží transpiraci (průduchy se zavírají, signalizace, redistribuce vody mezi xylémem a
floémem) a tím zvýší teplotu porostu. A tuto teplotní diferenci mezi kontrolní a stresovanou
odrůdou můžeme změřit.
Chladnější teplota porostu je v pozitivní korelaci k výnosu v horkých a sušších oblastech a v
negativní korelaci k obsahu vody v pletivech. Ve šlechtitelském procesu se touto cestou selektují
genotypy, schopné vysoké transpirace a výměny plynů, což indikuje lepší kapacitu extrahovat
vodu z půdního profilu (vyšší zásobení vodou - vyšší transpirace - nižší teplota listů).

3. SPEKTRÁLNÍ ODRAZIVOST
Odrazivost vegetačního krytu je ovlivňována jak fenologickou fází rostlin, tak biotickými a
abiotickými stresovými faktory, které vyvolávají snížení odrazivosti v oblasti NIR a nárůst v červené
části spektra. Tyto změny jsou spojeny s posuny zastoupení jednotlivých rostlinných pigmentů.
Jelikož ke změně dochází nejdříve v infračervené části spektra, je možná včasná detekce stresových
faktorů.
Snímání a následná analýza spojená se znalostmi spektrálního chování vegetačního povrchu
umožňuje studovat různé charakteristiky vegetačního pokryvu.
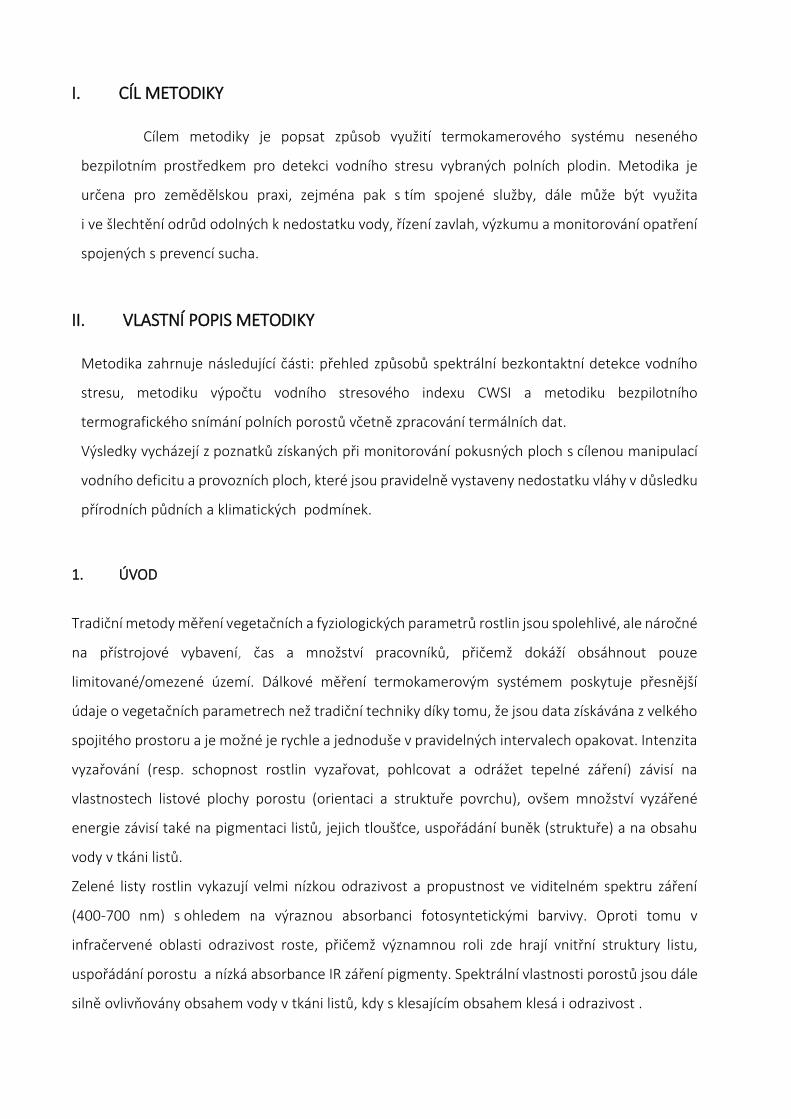
Výpočet spektrálních neboli vegetačních indexů (Tab. 1) představuje skupinu aritmetických
operací, které s využitím dvou či více spektrálních pásem umožňují zvýraznit určité vlastnosti
zkoumané vegetace, jako například celkové množství a kvalita fotosyntetizujícího materiálu nebo
stres z nedostatku vody v rostlině. Informace, které lze pomocí VI vyčíst, jsou díky GPS souřadnicím
vždy vztaženy ke konkrétnímu místu na zemském povrchu. Lze tak stanovit plochy, kde je třeba
přizpůsobit zemědělský management k zajištění optimálních podmínek pro růst zemědělských
plodin (např. Haberle et al. 2018b, Duffková et al. 2012, Brom et al. 2017). Dle principu výpočtu se
vegetační indexy dělí do dvou skupin. První tvoří tzv. poměrové indexy, které dávají do vztahu
odrazivost povrchů v červené a infračervené části spektra. Druhou skupinu tvoří tzv. ortogonální
indexy, které pracují s lineárními kombinacemi původních spektrálních pásem. Vegetační indexy
lze také dělit podle charakteru sdělované informace. Různě postavené vztahy tak mohou popisovat
množství biomasy či stresových pigmentů ve sledované vegetaci, obsah dusíku či uhlíku, poměr
vody v rostlině či její schopnost efektivně využívat dopadající světlo k fotosyntetickým procesům.
Nejběžněji používaným indexem je v současné době NDVI (Normalized Difference Vegetation
Index), přičemž vztah pro jeho výpočet byl stanoven již v roce 1973. NDVI dává do poměru hodnoty
odrazivosti v červeném a blízkém infračerveném spektru. Pro řidší porosty byl například vyvinut
index SAVI (Soil Adjusted Vegetation Index) a následně OSAVI (Optimalized Soil Adjusted
Vegetation Index). Tyto indexy potlačují příspěvek pixelů reprezentujících půdní povrch, proto jsou
vhodné pro hodnocení porostů širokořádkových plodin, jako je kukuřice nebo cukrová řepa. Stres
z nedostatku vody indikuje například MSI (Moisture Stress Index). Pokud se obsah vody zvyšuje,
zvyšuje se i absorpce ve vlnových délkách kolem 1599 nm, zatímco absorpce kolem 819 nm zůstává
nezměněna a slouží tedy jako srovnávací hladina. MSI nachází využití v rámci různých analýz, mezi
něž patří stresová analýza, předpověď produktivity, analýza ohrožení požárem nebo také studie
fyziologie ekosystému.
Index Vzorec Reference
Xanthophylové indexy
Fotochemický reflektanční index PRI570 (R570 − R531)/(R570 + R531) Gamon et al. (1992)
Normalizovaný PRInorm PRI570 / [RDVI ∙ (R700/R670)] Berni et al. (2009)
Fotochemický reflektanční index PRI515 (R515 − R531)/(R515 + R531) Hernández et al. (2011)
sFotochemický reflektanční index sPRI (R560 − R510)/(R560 + R510) Elvanidi et al. (2017)
Strukturální indexy
Normalizovaný diferenční vegetační index NDVI
(R790 − R670) / (R790 + R670) Rouse et al. (1974)
Renormalizovaný diferenční vegetační index RDVI
(R790 − R670) / ((R790 + R670) ∙ 0.5) Rougean and Breon (1995)
Optimalizovaný půdou adjustovaný vegetační index OSAVI
(1 + 0.16) ∙ (R800 − R670) / (R800 + R670 + 0.16) Rondeaux et al., 1996
mrSRI (R750 – R445) / (R705 - R670) Elvanidi et al. (2017)
mrNDVI (R750 – R705) / (R750 + R705 -2 ∙ R445) Elvanidi et al. (2017)
Chlorofylové indexy
Transformovaný chlorofylový absorbční a reflektanční index TCARI
3 ∙ [(R700 − R670) − 0.2 ∙ (R700 − R550) ∙ (R700/R670)] Haboudane et al. (2002)
TCARI / OSAVI [3 ∙ [(R700 − R670) − 0.2 ∙ (R700 − R550) ∙ (R700/R670)]]/[(1 + 0.16) ∙ (R800 − R670)/(R800 + R670 + 0.16)]
Gamon et al. (1992)
Vodní indexy
Normalizovaný diferenční vodní index NDWI
(R820 - R1240)/(R820 + R1240) Gao (1996)
Jednoduchý poměrový vodní index SRWI
R800/R1200 Zarco-Tejada & Ustin (2001)
Index vodního pásma WBI R970 / R900 Peñuelas et al. (1997)
NMDI
Moisture Stress Index MSI R1600/R820 Hunt and Rock (1989)
Hyperspectral Normalized Difference Vegetation Index hNDVI
(R900−R685)/ (R900+R685) Rouse et al. (1974)
Normalized Difference Infrared Index NDII
(R820−R1649)/ (R820+R1649) Hardisky et al. (1983)
Maximum Difference Water Index MDWI
(Rmax1500−1750)-(Rmin1500−1750)/(Rmax1500−1750)+(Rmin1500-1750)
Eitel et al. (2006)
Ratio Index (R1650/R2220) Elvidge and Lyon (1985)
Tab. 1 Vztahy pro výpočet vybraných vegetačních indexů používaných při detekci vodního stavu
rostlin
S možností aplikace výsledků do praxe také velmi úzce souvisí problematika prostorového
rozlišení vstupních dat. Prostorové rozlišení snímku je definováno velikostí pixelu, tedy základní
jednotky digitálních obrazových dat. Obecně platí, že družicové snímky mají nižší prostorové
rozlišení než snímky pořizované pomoc senzorů nesených bezpilotními prostředky. Při výběru
zdroje dat je proto vždy třeba zvážit, zda je dané prostorové rozlišení dostačující pro konkrétní
analýzu. Zatímco volně dostupné družicové snímky poskytují informace v prostorovém rozlišení
v řádech metrů (Landsat: 30 m; Sentinel-2: 10 m), senzory bezpilotních prostředků dosahují řádu
centimetrů. Družicové snímky jsou tak předně využívány k hodnocení větších ploch, data
s jemnějším prostorovým rozlišením pak mohou být využívána k mnohem přesnějším analýzám,
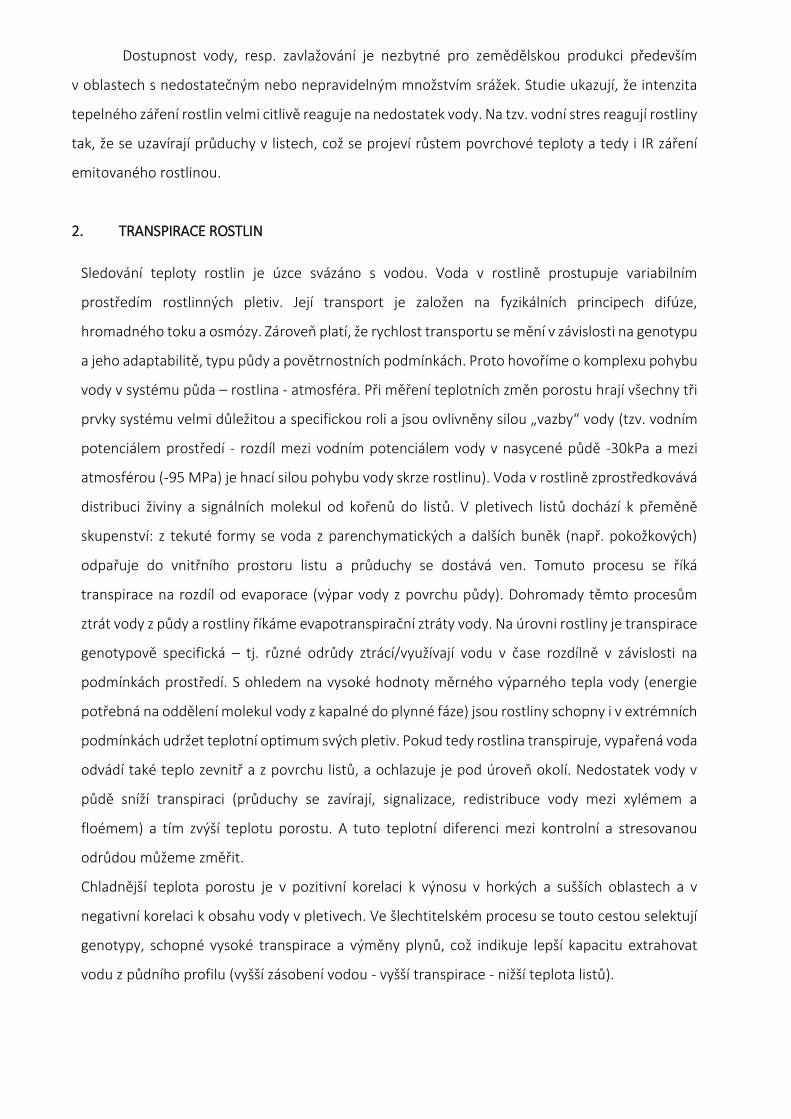
jako je například identifikace konkrétní plodiny či detekce stavu porostu. Níže je ilustrován
pozemek s rozlohou necelých 25 ha, snímaný v téměř totožný termín dvěma typy senzorů s
vypočteným NDVI index (Obr. 1).
Obr. 1 Porovnání prostorového rozlišení vstupních dat. Vlevo snímek z multispektrální kamery
(19.6.2017) s rozlišením 10 cm na pixel. Vpravo snímek družice Sentinel-2 (20.6.2017)
s rozlišením 10 m na pixel.
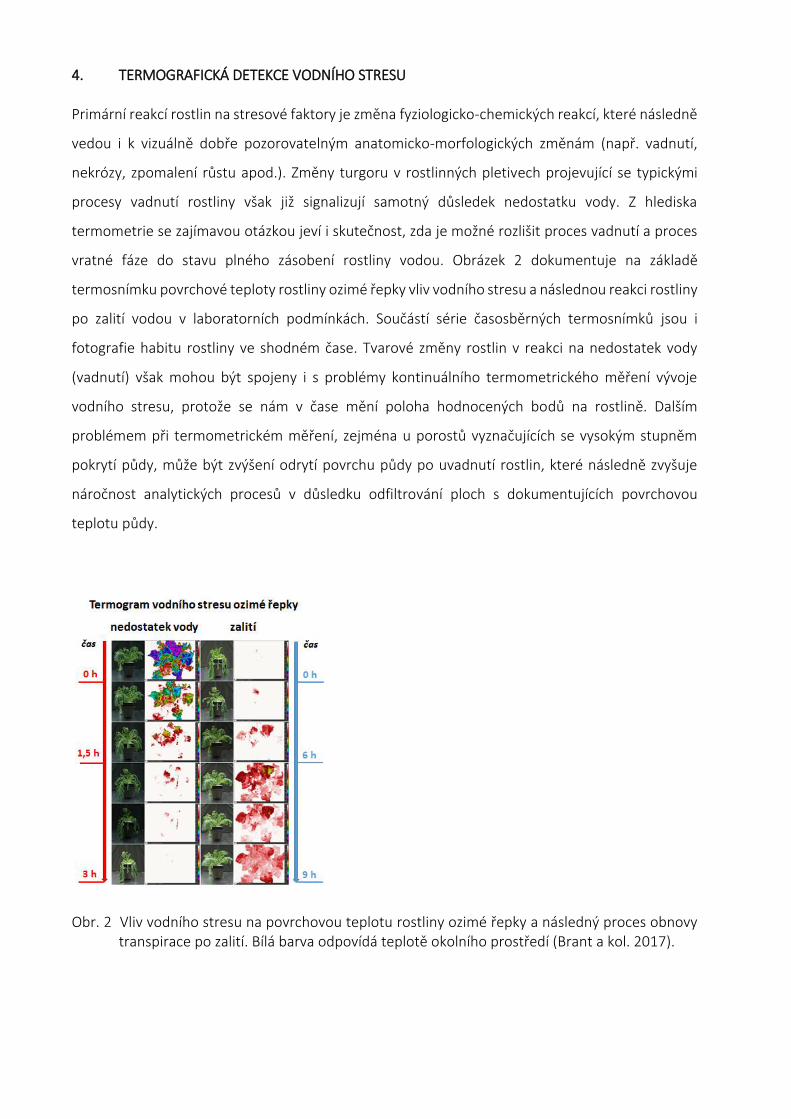
4. TERMOGRAFICKÁ DETEKCE VODNÍHO STRESU Primární reakcí rostlin na stresové faktory je změna fyziologicko-chemických reakcí, které následně
vedou i k vizuálně dobře pozorovatelným anatomicko-morfologických změnám (např. vadnutí,
nekrózy, zpomalení růstu apod.). Změny turgoru v rostlinných pletivech projevující se typickými
procesy vadnutí rostliny však již signalizují samotný důsledek nedostatku vody. Z hlediska
termometrie se zajímavou otázkou jeví i skutečnost, zda je možné rozlišit proces vadnutí a proces
vratné fáze do stavu plného zásobení rostliny vodou. Obrázek 2 dokumentuje na základě
termosnímku povrchové teploty rostliny ozimé řepky vliv vodního stresu a následnou reakci rostliny
po zalití vodou v laboratorních podmínkách. Součástí série časosběrných termosnímků jsou i
fotografie habitu rostliny ve shodném čase. Tvarové změny rostlin v reakci na nedostatek vody
(vadnutí) však mohou být spojeny i s problémy kontinuálního termometrického měření vývoje
vodního stresu, protože se nám v čase mění poloha hodnocených bodů na rostlině. Dalším
problémem při termometrickém měření, zejména u porostů vyznačujících se vysokým stupněm
pokrytí půdy, může být zvýšení odrytí povrchu půdy po uvadnutí rostlin, které následně zvyšuje
náročnost analytických procesů v důsledku odfiltrování ploch s dokumentujících povrchovou
teplotu půdy.
Obr. 2 Vliv vodního stresu na povrchovou teplotu rostliny ozimé řepky a následný proces obnovy
transpirace po zalití. Bílá barva odpovídá teplotě okolního prostředí (Brant a kol. 2017).
Hodnocení rizika vzniku vodního stresu
Přítomnost plevelů v porostech plodin je především spojena s poklesem obsahu vody v půdě a vede
ke snížení její dostupnosti pro kulturní rostliny (např. Azeez et al., 2005, Dailey et al., 2006; Sadeghi
et al., 2007). Regulace plevelných rostlin je jedním z faktorů vedoucím k omezení rizika vodního
stresu. Chemické metody regulace plevelů se však vyznačují rozdílnou rychlostí účinku skupin
účinných látek na omezení či zastavení transpirace plevelů. Změna transpiračních nároků plevelů
se následně projevuje na změně povrchové teploty rostliny.
Jednou z možností využití termometrie je hodnocení vlivu herbicidů na rychlost omezení
transpiračních procesů plevelných rostlin a následně i rychlosti vlivu účinné látky na jednotlivé
druhy plevelného spektra na stanovišti. Brant a kol. (2014) prokázali pomocí měření toku vody v
rostlinách velmi rychlý vliv přípravků ze skupiny inhibitorů fotosystému II na omezení transpirace
ve srovnání s inhibitory auxinů. Z hlediska účinku chemických látek na rostliny se jedná o samotný
proces vlivu aplikace na fyziologické projevy rostliny, zejména v souvislosti s chemickými procesy v
rostlině. Tyto procesy mohou být spojeny s omezenou funkcí autoregulačních procesů spojených
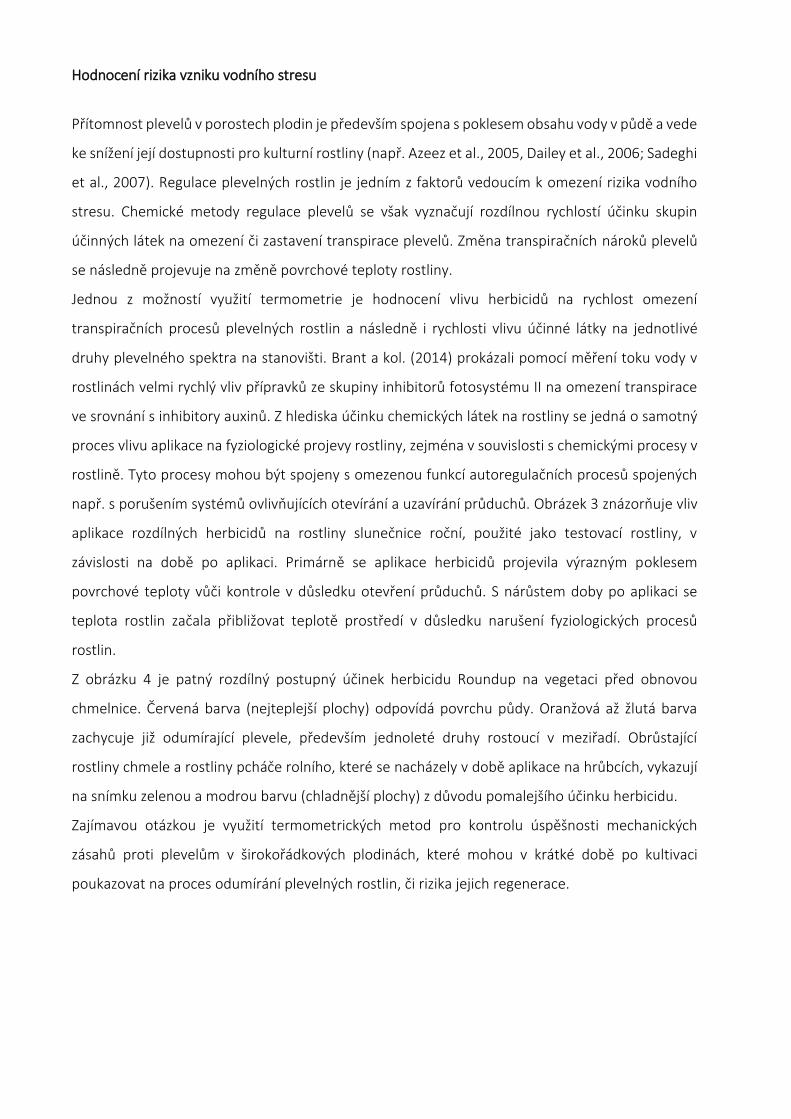
např. s porušením systémů ovlivňujících otevírání a uzavírání průduchů. Obrázek 3 znázorňuje vliv
aplikace rozdílných herbicidů na rostliny slunečnice roční, použité jako testovací rostliny, v
závislosti na době po aplikaci. Primárně se aplikace herbicidů projevila výrazným poklesem
povrchové teploty vůči kontrole v důsledku otevření průduchů. S nárůstem doby po aplikaci se
teplota rostlin začala přibližovat teplotě prostředí v důsledku narušení fyziologických procesů
rostlin.
Z obrázku 4 je patný rozdílný postupný účinek herbicidu Roundup na vegetaci před obnovou
chmelnice. Červená barva (nejteplejší plochy) odpovídá povrchu půdy. Oranžová až žlutá barva
zachycuje již odumírající plevele, především jednoleté druhy rostoucí v meziřadí. Obrůstající
rostliny chmele a rostliny pcháče rolního, které se nacházely v době aplikace na hrůbcích, vykazují
na snímku zelenou a modrou barvu (chladnější plochy) z důvodu pomalejšího účinku herbicidu.
Zajímavou otázkou je využití termometrických metod pro kontrolu úspěšnosti mechanických
zásahů proti plevelům v širokořádkových plodinách, které mohou v krátké době po kultivaci
poukazovat na proces odumírání plevelných rostlin, či rizika jejich regenerace.
Obr. 3 Vliv účinku rozdílných herbicidů na povrchovou teplotu listů slunečnice roční použité jako
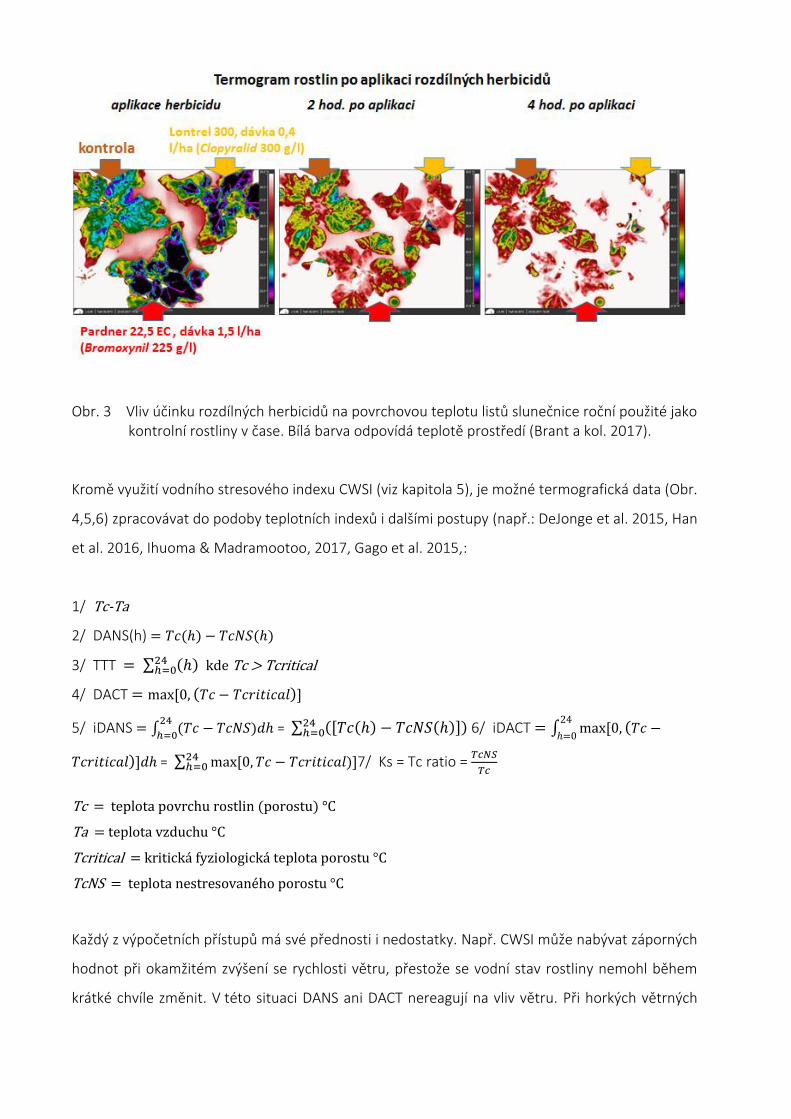
kontrolní rostliny v čase. Bílá barva odpovídá teplotě prostředí (Brant a kol. 2017). Kromě využití vodního stresového indexu CWSI (viz kapitola 5), je možné termografická data (Obr.
4,5,6) zpracovávat do podoby teplotních indexů i dalšími postupy (např.: DeJonge et al. 2015, Han
et al. 2016, Ihuoma & Madramootoo, 2017, Gago et al. 2015,:
1/ Tc-Ta
2/ DANS(h) = 𝑇𝑐(ℎ) − 𝑇𝑐𝑁𝑆(ℎ)
3/ TTT = ∑ (ℎ)24ℎ=0 kde Tc > Tcritical
4/ DACT = max [0, (𝑇𝑐 − 𝑇𝑐𝑟𝑖𝑡𝑖𝑐𝑎𝑙)]
5/ iDANS = ∫ (𝑇𝑐 − 𝑇𝑐𝑁𝑆)𝑑ℎ24
ℎ=0 = ∑ ([𝑇𝑐(ℎ) − 𝑇𝑐𝑁𝑆(ℎ)])24
ℎ=0 6/ iDACT = ∫ max [0, (𝑇𝑐 −24
ℎ=0
𝑇𝑐𝑟𝑖𝑡𝑖𝑐𝑎𝑙)]𝑑ℎ = ∑ max [0, 𝑇𝑐 − 𝑇𝑐𝑟𝑖𝑡𝑖𝑐𝑎𝑙)]24ℎ=0 7/ Ks = Tc ratio =
𝑇𝑐𝑁𝑆
𝑇𝑐
Tc = teplota povrchu rostlin (porostu) °C
Ta = teplota vzduchu °C
Tcritical = kritická fyziologická teplota porostu °C
TcNS = teplota nestresovaného porostu °C
Každý z výpočetních přístupů má své přednosti i nedostatky. Např. CWSI může nabývat záporných
hodnot při okamžitém zvýšení se rychlosti větru, přestože se vodní stav rostliny nemohl během
krátké chvíle změnit. V této situaci DANS ani DACT nereagují na vliv větru. Při horkých větrných

dnech, kdy i dostatečně zavlažené rostliny s nejnižší teplotou uzavírají průduchy, vykazuje výpočet
metodou DANS a iDANS hodnoty rovné nule, tedy beze stresu, zatímco metoda CWSI může falešně
pozitivně indikovat potřebu závlahy. CWSI má výhodu v tom, kromě teploty reaguje i na vodní
sytostní deficit (VPD).
Obr. 4 Rozdílný postupný účinek herbicidu Roundup na vegetaci před obnovou chmelnice. Červená barva odpovídá povrchu půdy. Oranžová až žlutá barva zachycuje již odumírající plevele, především jednoleté druhy. Zelená a modrá barva zachycuje vytrvalé druhy, u nichž byl účinek herbicidu pozvolnější (Brant a kol. 2017).
Obr. 5 Porovnání RGB informace s termogramem poloprovozního pokusu ozimé pšenice
s přirozeně dostupnou vodou (levá část pole označená symbolem mraku s deštěm)
a řízenou kapkovou závlahou (pravá část pole označená symbolem konve).
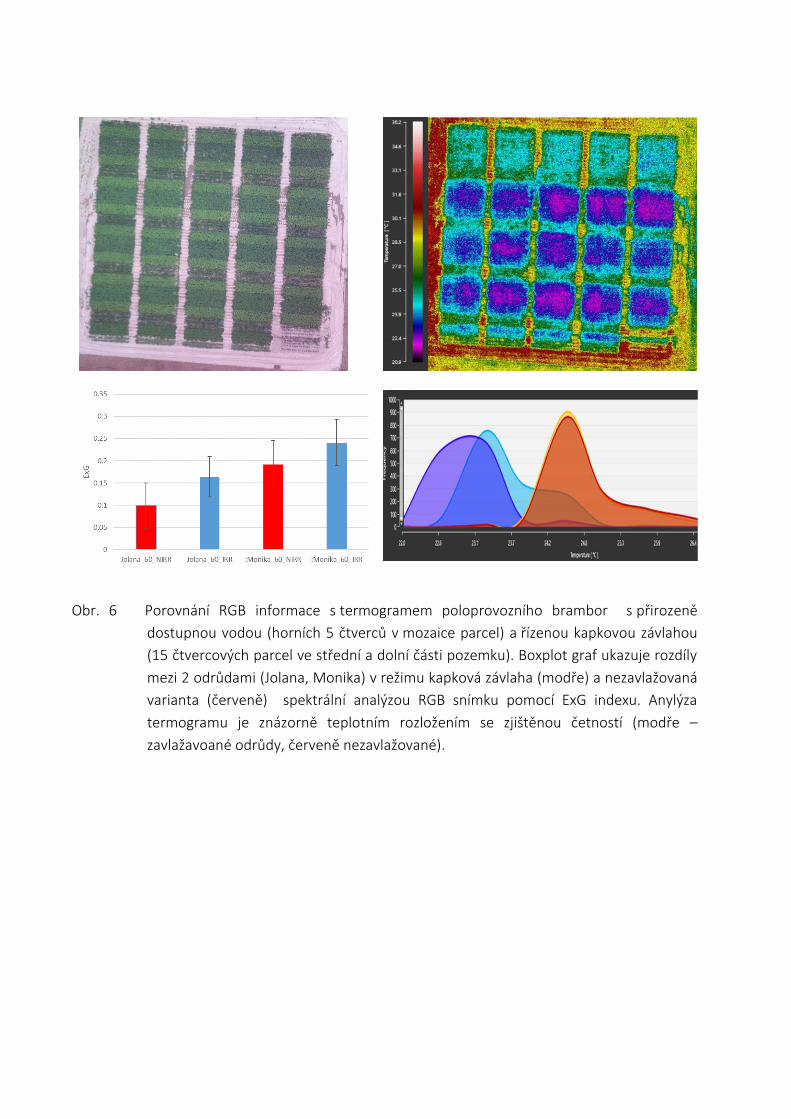
Obr. 6 Porovnání RGB informace s termogramem poloprovozního brambor s přirozeně
dostupnou vodou (horních 5 čtverců v mozaice parcel) a řízenou kapkovou závlahou
(15 čtvercových parcel ve střední a dolní části pozemku). Boxplot graf ukazuje rozdíly
mezi 2 odrůdami (Jolana, Monika) v režimu kapková závlaha (modře) a nezavlažovaná
varianta (červeně) spektrální analýzou RGB snímku pomocí ExG indexu. Anylýza
termogramu je znázorně teplotním rozložením se zjištěnou četností (modře –
zavlažavoané odrůdy, červeně nezavlažované).
5. VODNÍ STRESOVÝ INDEX CWSI
Sucho patří k průvodním jevům našeho klimatu a je jevem, s nímž je nutno počítat jak v zemědělské
praxi, tak i ve vodním hospodářství a dalších odvětvích.
Pro porovnání míry deficitu vody v různé denní době a při odlišných povětrnostních podmínkách
nestačí pouze (absolutní) rozdíl teplot rostlin a vzduchu, ale je nutné zohlednit vodní sytostní
doplněk (WPD), který určuje „suchost“ vzduchu a potenciální intenzitu výparu a ochlazování
povrchu rostlin (aj. materiálů). Z teploty vzduchu a rostlin a relativní vlhkosti vzduchu lze empiricky
vypočítat relativní hodnotu vodního stresu rostlin, index CWSI (Idso 1981, Idso et al. 1977, 1982).
Index porovnává rozdíl teploty vzduchu (ve 2 m) a teploty rostlin s hodnotami nejvyššího možného
rozdílu teplot porostu a vzduchu u netranspirujících rostlin, které se neochlazují. Spodní hranici pro
výpočet indexu představuje nejnižší rozdíl teplot plně transpirujícího (ochlazovaného) povrchu a
teploty vzduchu - to vše pro danou aktuální úroveň sytostního doplňku (SD). Hodnota CWSI se
nejčastěji pohybuje od 0 do 1, přičemž hodnoty stoupající směrem k 1 indikují rostoucí stres
(rostliny omezují transpiraci, neochlazují se).
Vlhká referenční plocha představuje plně transpirující list rostliny s maximálně otevřenými
průduchy, zatímco suchá referenční plocha list rostliny netranspirující, se zcela uzavřenými
průduchy. Zdrojem referenčních ploch jsou "umělé listy" vyrobené z černého kovu o rozměrech
d=5cm, š=1cm, v=0.5cm, které jsou součástí přístroje Evaposensor, kde vlhká referenční plocha je
udržována pomocí černého bavlněného knotu nasávajícího ze zásobníku destilovanou vodu, suchá
referenční plocha je nevlhčená. Suchou referenční plochu lze například simulovat pomocí
nezavlažované kontroly sledované plodiny (Tdry), resp. cíleně zavlažované plochy (Twet). Referenční
plochy lze nahradit i černou bavlněnou tkaninou (Tdry) spolu s trvale vlhčenou variantou téže
tkaniny (Twet). Jako suchou referenční teplotu lze použít i maximální denní teplotu vzduchu
měřenou ve 2m, ke které je přičteno 5°C, spolu s povrchovou teplotu vlhkého teploměru (Twet).
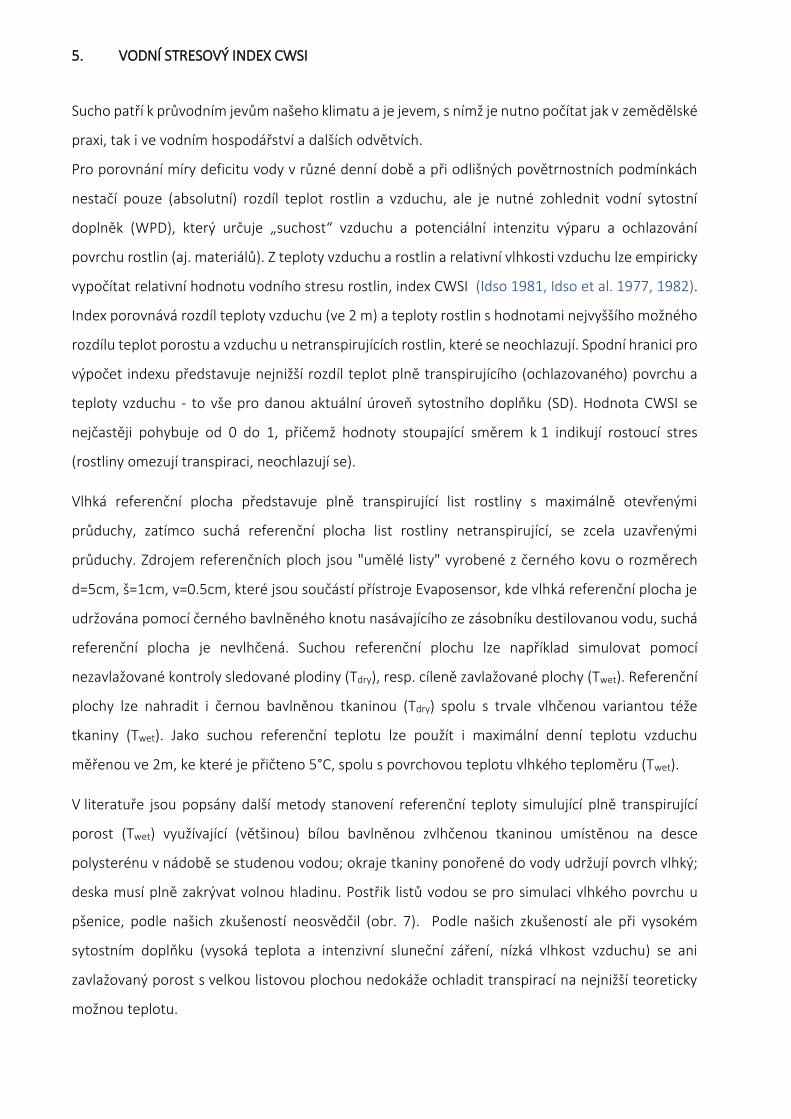
V literatuře jsou popsány další metody stanovení referenční teploty simulující plně transpirující
porost (Twet) využívající (většinou) bílou bavlněnou zvlhčenou tkaninou umístěnou na desce
polysterénu v nádobě se studenou vodou; okraje tkaniny ponořené do vody udržují povrch vlhký;
deska musí plně zakrývat volnou hladinu. Postřik listů vodou se pro simulaci vlhkého povrchu u
pšenice, podle našich zkušeností neosvědčil (obr. 7). Podle našich zkušeností ale při vysokém
sytostním doplňku (vysoká teplota a intenzivní sluneční záření, nízká vlhkost vzduchu) se ani
zavlažovaný porost s velkou listovou plochou nedokáže ochladit transpirací na nejnižší teoreticky
možnou teplotu.
Obr. 7 Porovnání teploty porostu pšenice, umělého povrchu (vlhčená bavlněná tkanina) v porostu
(nahoře), na půdě (uprostřed) a rostlin vlhčených vodou (dole). ¨
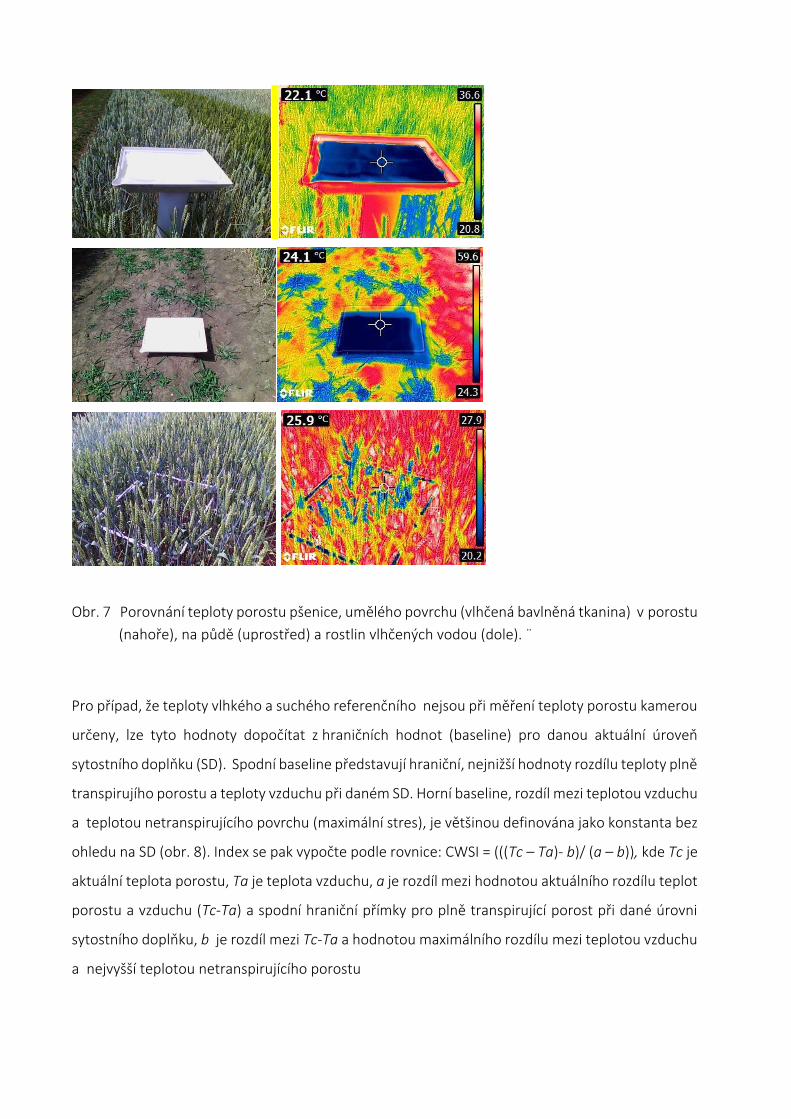
Pro případ, že teploty vlhkého a suchého referenčního nejsou při měření teploty porostu kamerou
určeny, lze tyto hodnoty dopočítat z hraničních hodnot (baseline) pro danou aktuální úroveň
sytostního doplňku (SD). Spodní baseline představují hraniční, nejnižší hodnoty rozdílu teploty plně
transpirujího porostu a teploty vzduchu při daném SD. Horní baseline, rozdíl mezi teplotou vzduchu
a teplotou netranspirujícího povrchu (maximální stres), je většinou definována jako konstanta bez
ohledu na SD (obr. 8). Index se pak vypočte podle rovnice: CWSI = (((Tc – Ta)- b)/ (a – b)), kde Tc je
aktuální teplota porostu, Ta je teplota vzduchu, a je rozdíl mezi hodnotou aktuálního rozdílu teplot
porostu a vzduchu (Tc-Ta) a spodní hraniční přímky pro plně transpirující porost při dané úrovni
sytostního doplňku, b je rozdíl mezi Tc-Ta a hodnotou maximálního rozdílu mezi teplotou vzduchu
a nejvyšší teplotou netranspirujícího porostu
Obr. 8 Schématické znázornění výpočtu stresového indexu CWSI (podle Idso 1981). TC – teplota
porostu, TA - teplota vzduchu.
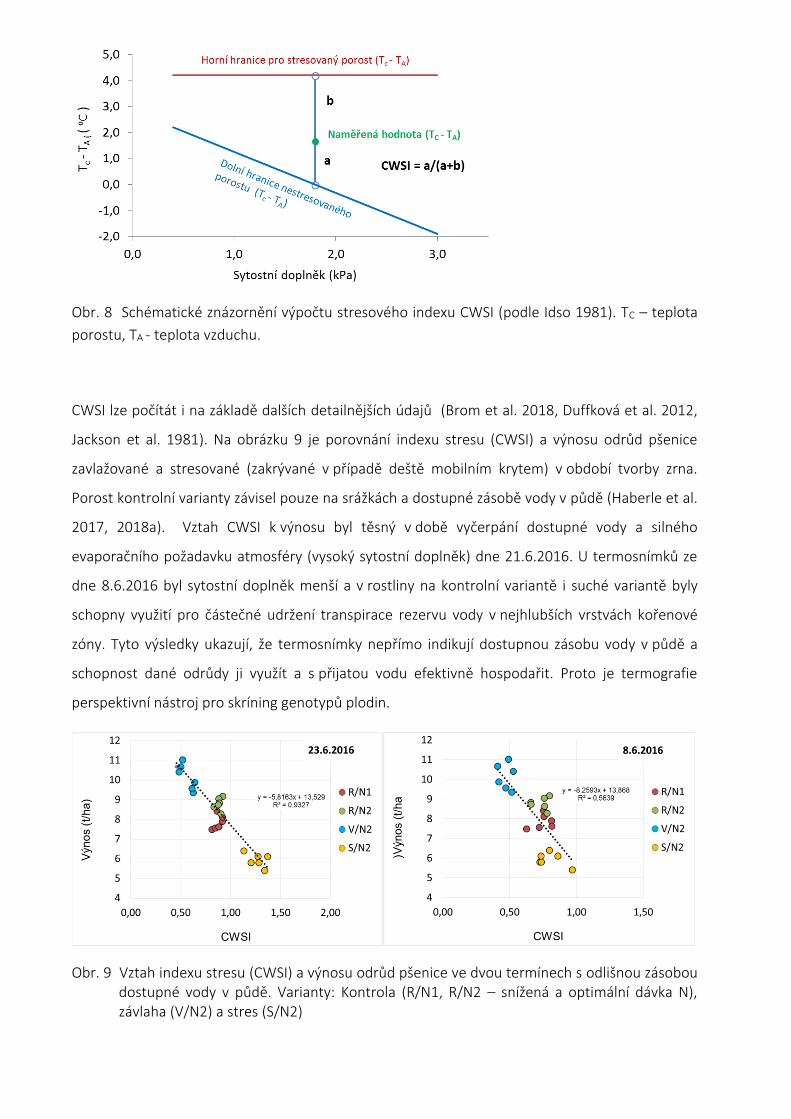
CWSI lze počítát i na základě dalších detailnějších údajů (Brom et al. 2018, Duffková et al. 2012,
Jackson et al. 1981). Na obrázku 9 je porovnání indexu stresu (CWSI) a výnosu odrůd pšenice
zavlažované a stresované (zakrývané v případě deště mobilním krytem) v období tvorby zrna.
Porost kontrolní varianty závisel pouze na srážkách a dostupné zásobě vody v půdě (Haberle et al.
2017, 2018a). Vztah CWSI k výnosu byl těsný v době vyčerpání dostupné vody a silného
evaporačního požadavku atmosféry (vysoký sytostní doplněk) dne 21.6.2016. U termosnímků ze
dne 8.6.2016 byl sytostní doplněk menší a v rostliny na kontrolní variantě i suché variantě byly
schopny využití pro částečné udržení transpirace rezervu vody v nejhlubších vrstvách kořenové
zóny. Tyto výsledky ukazují, že termosnímky nepřímo indikují dostupnou zásobu vody v půdě a
schopnost dané odrůdy ji využít a s přijatou vodu efektivně hospodařit. Proto je termografie
perspektivní nástroj pro skríning genotypů plodin.
Obr. 9 Vztah indexu stresu (CWSI) a výnosu odrůd pšenice ve dvou termínech s odlišnou zásobou dostupné vody v půdě. Varianty: Kontrola (R/N1, R/N2 – snížená a optimální dávka N), závlaha (V/N2) a stres (S/N2)

7. TERMOKAMERY A TERMOGRAFIE PRO STANOVENÍ INDEXU VODNÍHO STRESU Tepelné záření
Všechna fyzikální tělesa, jejichž teplota je vyšší než absolutní nula, vyzařují elektromagnetické
záření. Toto záření je emitováno v důsledku tepelného pohybu částic hmoty, z nichž je těleso
složeno a označuje se jako tzv. tepelné záření. Při bezdotykovém měření teploty se využívá
elektromagnetické záření o vlnových délkách přibližně 0,4 až 15 μm, tedy části spektra tzv.
infračerveného záření a podstatná část tzv. viditelného záření.
Pro stanovování hodnoty indexu vodního stresu polních plodin se pak prakticky výhradně používají
v provozní praxi tzv. LWIR (Long-Wave Infrared) termokamery, které pracují v pásmu přibližně 7 až
14 μm. Naproti tomu MWIR (Mid-Wave Infrared) přístroje je pak v současné době možné,
vzhledem k jejich váze a vysoké ceně (chlazené systémy s kvantovými detektory), používat
výhradně v laboratoři či při experimentálním výzkumu. Jejich použití je však teoreticky také možné
a lze očekávat, že tyto přístroje budou pro účely stanovení indexu vodního stresu polních plodin
vykazovat i lepší parametry (přesnost měření, teplotní citlivost, homogenitu termogramu apod.).
Intenzita emitovaného záření z povrchu těles závisí na povrchové teplotě těchto těles. Vzájemné
souvislosti mezi intenzitou záření, teplotou, vlnovou délkou a dalšími fyzikálními veličinami popisují
následující fyzikální zákony: Planckův vyzařovací zákon, Wienův posunovací zákon a Stefanův-
Boltzmannův zákon. Kirchhoffovy zákony pak popisují interakci infračerveného záření s pevnou
látkou a definují pojmy jako odrazivost, pohltivost, propustnost a emisivita.
Termokamery a jejich parametry
Termokamera jako měřicí přístroj zaznamenává intenzitu tepelného záření vyzařovaného z povrchu
měřených (snímaných) objektů. Na základě naměřené intenzity vyzařování a zadaných parametrů
měření je pak termokamera schopna výpočtem stanovit rozložení povrchové teploty. Výstupem z
měření termokamerou je tzv. termogram (nesprávně též termovizní snímek, termosnímek apod.).
Termogram je obdoba fotografie, tj. digitálního snímku, kdy ale jednotlivé pixely nenesou informaci
o naměřeném jasu, nýbrž o povrchové teplotě snímaných objektů. A podle toho, zda jsou správně
zadány parametry měření se hovoří o skutečné teplotě (parametry měření jsou zadány) nebo o
zdánlivé teplotě (parametry měření nejsou zadány správně).

Z hlediska principu konstrukce jsou termokamery velmi podobné klasickým fotoaparátům. Tím
hlavním rozdílem je optický senzor, resp. obrazový detektor (nejčastěji je na tomto místě použito
tzv. mikrobolometrické pole v případě LWIR termokamer nebo alternativně některý z kvantových
detektorů jako např. InGaAs, QWIP, InSb apod. v případě MWIR termokamer) a použitá optika,
která musí být z materiálu propustného pro daný rozsah vlnových délek, v němž termokamera
pracuje. Detektor infračerveného záření převádí dopadající tepelné záření na elektrický signál,
který je digitalizován a pak dále zpracován mikroprocesory termokamery - vzniká tak tzv.
radiometrický signál, tj. signál, který nese informaci o povrchové teplotě měřených objektů. Vedle
optiky se jedná o nejdůležitější součást termokamery a jeho konstrukce a princip funkce
podstatným způsobem ovlivňuje parametry termokamery.
Nejčastěji používané termokamery snímají tepelné záření ve vlnovém pásmu přibližně 8 až 14 μm.
Jako optický senzor záření je pak použito tzv. mikrobolometrické pole a materiál, z něhož je
konstruována optika, je germanium s nanesenou antireflexní vrstvou. Termokamery, které pracují
v tomto vlnovém pásmu, se označují jako LWIR termokamery.
Rozlišení obrazového senzoru
Moderní termokamery využívají obrazové senzory a jsou schopny v rámci jednoho snímku změřit
povrchovou teplotu v 640x512 i více bodech, což je pak také rozlišení výsledného termogramu. Čím
větší je rozlišení termogramu, tím větší prostorové rozlišení lze při měření povrchové teploty získat
(aniž by docházelo ke změně vzdálenosti, či výměně objektivu). Zjednodušeně řečeno platí, že čím
je větší rozlišení termokamery, tím může být jedním snímkem (termogramem) zmapována větší
oblast při zachování geometrického rozlišení. Další obvyklá rozlišení mikrobolometrického senzoru
jsou 320 x 240 a 160 x 120. Nižší rozlišení senzoru než 320 x 240 pixelů nelze, z důvodu malého
rozlišení výsledných snímků, považovat za vhodné pro potřeby leteckého snímkování prováděného
za účelem stanovení indexu vodního stresu polních plodin.
Teplotní citlivost
Termokamery jsou mimořádně citlivá měřící zařízení, kdy u nejmodernějších modelů dosahuje
schopnost změřit nejmenší teplotní rozdíly hodnot 0.03 °C až 0.015 °C, tj. 30 mK až 150 mK (menší
hodnota je lepší). Problematika stanovení indexu vodního stresu vyžaduje teplotní citlivost
termokamery alespoň 50 mK, lépe však 30 mK. Těmto požadavkům plně dostačují moderní
mikrobolometrické LWIR senzory. Údaj bývá výrobcem vyjádřen prostřednictvím parametru NETD
(tj. Noise Equivalent Temperature Difference).
Přesnost měřicího přístroje
Každé měření ve fyzice, ať již extenzivních (např. délka) nebo intenzivních (např. teplota jako v
našem případě) veličin, je zatíženo určitou nepřesností, způsobenou nejrůznějšími negativními
vlivy, které se v měřicím procesu vyskytují. To se ve výsledku projeví odchylkou mezi naměřenou a
skutečnou hodnotou sledované veličiny. Výsledek měření se tak vždy pohybuje v určitém
pravděpodobném rozsahu (v tzv. chybovém intervalu), o který se může skutečná hodnota veličiny
odlišovat od naměřené.
Nejistota měření teploty termokamerou je dána konstrukcí a vlastnostmi termokamery a danou
metodou (zde je třeba počítat s tím, že se jedná o měření nepřímé). Z hlediska přístroje udávají
výrobci prakticky bez výhrad hodnotu buď 2 °C ± 2 % z rozsahu (přičemž platí horší z obou údajů)
nebo 1 °C ± 1 %. Nižší hodnota nejistoty měřícího přístroje je pro účely stanovení indexu vodního
stresu polních plodin vhodnější. V současné době ale nejsou přístroje s udávanou nejistotou 1 °C ±
1 °C pro tyto účely příliš dostupné, neboť jde o údaj typický pro MWIR termokamery s vysokými
pořizovcími náklady, velkou váhou, obtížnou manipulovatelností apod.
Výpočet teploty z radiometrických dat
Při měření teploty s pomocí termokamery (obecně však při jakémkoli bezdotykovém měření
teploty) je tedy třeba vždy pamatovat na to, že termokamerou není přímo měřená (skutečná)
absolutní teplota povrchu. Jedná se tedy o měření nepřímé - výsledná veličina není měřena přímo,
ale je stanovena výpočtem z jiných, přímo či nepřímo měřených veličin. Jak vyplývá z fyzikálního
popisu problematiky tepelného záření, absolutní teplota může být termokamerou (a to více či
méně přesně) výpočtem stanovena až po zadání tzv. parametrů měření. Těmito parametry
(vyplývající z rovnice termografie) jsou:
● emisivita - materiálová (optická) vlastnost snímaného povrchu, emisivita je funkcí
především vlnové délky a povrchové teploty objektu,
● odražená zdánlivá teplota - vliv vyzařování okolních objektů, jejichž záření se odráží ze
snímaného povrchu do objektivu termokamery a lze ho tak vydávat za vlastní záření
pocházející z povrchu objektu,
● vzdálenost, atmosférická vlhkost a atmosférická teplota - jedná se o parametry atmosféry,
které modelují vliv jednak 1) vlastního vyzařování atmosféry a jednak 2) útlumové vlastnosti
atmosféry, kdy atmosféra utlumuje tepelné záření z povrchu snímaného objektu (a to jak
vlastní záření snímaného objektu, tak záření, které snímaný objekt odráží a které pochází z
okolních těles).
Pro měření blízkých těles (vzdálenost několika málo metrů) se vliv atmosféry uplatňuje poměrně
málo a podstatné je především správné nastavení emisivity a odražené zdánlivé teploty. S rostoucí
vzdáleností od měřeného objektu se však vliv vzdálenosti uplatňuje významněji a při leteckém
snímkování tedy její vliv nelze obvykle zanedbat. Zanedbání se v praxi realizuje nastavením
parametru vzdálenost na hodnotu 0.
Kvantitativní závislost jednotlivých parametrů měření vyjadřuje tzv. rovnice termografie.
Pochopení rovnice termografie je nezbytné pro vyhodnocení naměřených údajů a stanovení nebo
odhadu možné chyby měření. Z těchto důvodů rovnici termografie dále uvádíme a to, i když je v
termokameře i v příslušném software rovnice vždy implementována tak, že při zadání jednotlivých
parametrů dochází k automatickému přepočtu výsledné stanovené teploty.
Rovnice termografie
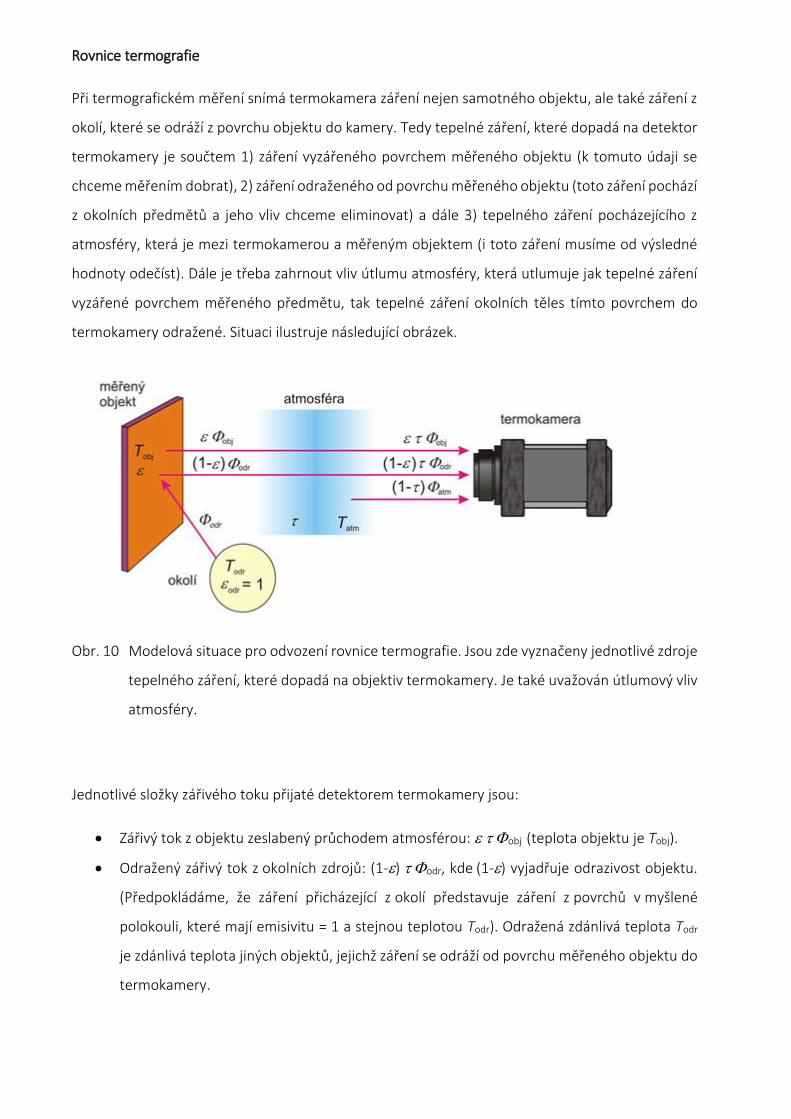
Při termografickém měření snímá termokamera záření nejen samotného objektu, ale také záření z
okolí, které se odráží z povrchu objektu do kamery. Tedy tepelné záření, které dopadá na detektor
termokamery je součtem 1) záření vyzářeného povrchem měřeného objektu (k tomuto údaji se
chceme měřením dobrat), 2) záření odraženého od povrchu měřeného objektu (toto záření pochází
z okolních předmětů a jeho vliv chceme eliminovat) a dále 3) tepelného záření pocházejícího z
atmosféry, která je mezi termokamerou a měřeným objektem (i toto záření musíme od výsledné
hodnoty odečíst). Dále je třeba zahrnout vliv útlumu atmosféry, která utlumuje jak tepelné záření
vyzářené povrchem měřeného předmětu, tak tepelné záření okolních těles tímto povrchem do
termokamery odražené. Situaci ilustruje následující obrázek.
Obr. 10 Modelová situace pro odvození rovnice termografie. Jsou zde vyznačeny jednotlivé zdroje
tepelného záření, které dopadá na objektiv termokamery. Je také uvažován útlumový vliv
atmosféry.
Jednotlivé složky zářivého toku přijaté detektorem termokamery jsou:
Zářivý tok z objektu zeslabený průchodem atmosférou: obj (teplota objektu je Tobj).
Odražený zářivý tok z okolních zdrojů: (1-) odr, kde (1-) vyjadřuje odrazivost objektu.
(Předpokládáme, že záření přicházející z okolí představuje záření z povrchů v myšlené
polokouli, které mají emisivitu = 1 a stejnou teplotou Todr). Odražená zdánlivá teplota Todr
je zdánlivá teplota jiných objektů, jejichž záření se odráží od povrchu měřeného objektu do
termokamery.
Zářivý tok emitovaný atmosférou: (1-) atm, kde (1-) vyjadřuje emisivitu atmosféry, jejíž
teplota je Tatm.
Uvažuje se plná transparentnost optiky termokamery a zářivý tok optických komponent se
považuje za zanedbatelný.
Nyní lze sestavit rovnici pro celkový zářivý tok, který dopadá na detektor termokamery. Tato
rovnice se někdy označuje jako rovnice měření termokamerou nebo také rovnice termografie.
𝑐𝑒𝑙𝑘 = 𝑜𝑏𝑗 + (1 − ) 𝑜𝑑𝑟 + (1 − ) 𝑎𝑡𝑚 (4 )
Při použití Stefannova-Bolzmannova zákona pro šedé těleso by bylo možné odvodit vztah, podle
kterého mikroprocesor termokamery vypočítává teplotu jednotlivých částí měřeného povrchu na
základě signálů ze senzorů maticového detektoru.
Provedeme-li zjednodušení tak, že zanedbáme vyzařování atmosféry, dostaneme vztah
𝑐𝑒𝑙𝑘 = 𝑜𝑏𝑗 + (1 − ) 𝑜𝑑𝑟 (5)
Výraz obj reprezentuje zářivý tok z objektu, jehož povrchová teplota je měřena, zatímco výraz
(1-) odr představuje parazitní zářivý tok dopadající na detektor a jeho vliv je zapotřebí korigovat.
Uživatel termokamery musí proto zadat parametry měření: emisivitu objektu , zdánlivou
odraženou teplotu Todr, teplotu atmosféry Tatm a propustnost atmosféry (místo propustnosti
atmosféry se obvykle zadává relativní vlhkost a vzdálenost termokamery od objektu). Parametry
měření jsou u termokamery přednastaveny na určité hodnoty, pro správné vyhodnocení měřené
teploty je nutno tyto parametry korigovat podle skutečné situace. Každá měřicí (radiometrická)
termokamera je vybavena možností korekce těchto parametrů.
Jak již bylo řečeno, rovnice termografie je v termokameře již implementována. V praxi je pak
nezbytné jen zadání parametrů měření. Způsob jejich stanovení je diskutován dále.
Parametry měření a jejich stanovení
Emisivita
Pro stanovení emisivity jsou normou ISO 18434-1 doporučovány dvě velmi podobné metody: I)
kontaktní metoda a II) metoda využívající materiál s referenční emisivitou. Obě metody vycházejí
ze stejné úvahy: pro stanovení emisivity je třeba znát v určitém okamžiku hodnotu skutečné teploty
povrchu. Ta je v případě kontaktní metody stanovena dotykovým teploměrem, v případě metody
využívající tzv. materiál s referenční emisivitou je na povrch měřeného objektu nanesen tento
referenční materiál (nejčastěji jde o nátěr či vhodnou lepicí pásku) a následně je pomocí
termokamery stanovena jeho teplota a to takto: bez změny polohy termokamery se mění nastavení
hodnoty emisivity v termokameře tak, aby teplota vyhodnocená termokamerou byla stejná, jako
teplota změřená kontaktně či na materiálu s referenční emisivitou. Před provedením uvedeného
postupu je třeba nejprve korigovat vliv odražené zdánlivé teploty.
Obě výše zmíněné metody vyžadují, aby teplota povrchu, jehož emisivita je určována, byla vyšší
alespoň o 20 °C než je teplota okolních předmětů, resp. teplota zdrojů tepelného záření, které se
může potenciálně nebo skutečně odrážet od snímaného povrchu. Toho lze v terénu docílit jen
obtížně a tak se počítá se stanovením emisivity laboratorně. V praxi pak doporučujeme vytvořit
tabulku emisivit pro často snímané polní plodiny. Dle výsledků vlastních měření lze očekávat
vysokou emisivitu většiny plodin, tj. 0.95 a vyšší, což je běžné u organických materiálů.
Odražená zdánlivá teplota
Vzhledem ke kolmému měření polních plodin, kdy je bezpilotní letadlo s termokamerou nad
měřeným povrchem, je atmosféra hlavním zdrojem tepelného záření, které dopadá na snímaný
povrch a odráží se z něho jako odražená zdánlivá teplota do objektivu termokamery. Zdánlivá
teplota atmosféry se v závislosti pohybuje od velmi nízkých hodnot pro jasnou oblohu (-40°C a
méně) po teplotu blízkou atmosférické teplotě v blízkosti povrchu a to v závislosti na typu a hustotě
oblačnosti.
Technická norma ČSN ISO 18434-1 popisuje dvě metody stanovení odražené zdánlivé teploty, tj.
tzv. “metodu odrazu” a tzv. “nepřímou metodu”.
Stanovení odražené zdánlivé teploty tzv. metodou odrazu dle ČSN ISO 18434-1 vychází z využití IČ
odražeče, což je např. „zmačkaná“ a opětovně narovnaná lesklá hliníková fólie, která se připevní
na rovnou desku lesklou stranou nahoru. IČ odražeč se pak umístí rovnoběžně před měřený povrch.
Vzhledem ke konstrukci má IČ odražeč vysokou odrazivost a lze tedy na něm pozorovat odraz
tepelného záření, které by jinak dopadalo na povrch měřeného předmětu. Při tomto měření je
emisivita v termokameře nastavena na hodnotu 1 a vzdálenost na hodnotu 0. Zdánlivá teplota,
která je při tomto měření naměřena na povrchu IČ odražeče, je v podstatě tou hledanou, od
objektu se odrážející zdánlivou teplotou. Příklad stanovení odražené zdánlivé teploty je uveden na
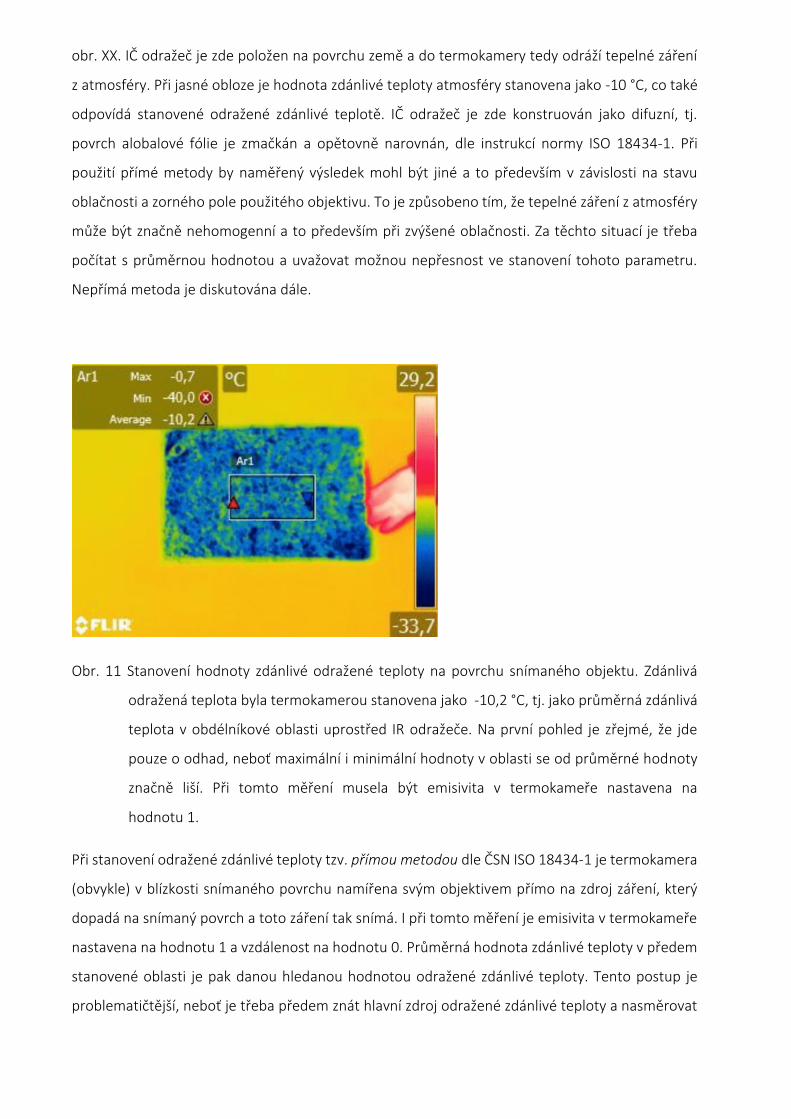
obr. XX. IČ odražeč je zde položen na povrchu země a do termokamery tedy odráží tepelné záření
z atmosféry. Při jasné obloze je hodnota zdánlivé teploty atmosféry stanovena jako -10 °C, co také
odpovídá stanovené odražené zdánlivé teplotě. IČ odražeč je zde konstruován jako difuzní, tj.
povrch alobalové fólie je zmačkán a opětovně narovnán, dle instrukcí normy ISO 18434-1. Při
použití přímé metody by naměřený výsledek mohl být jiné a to především v závislosti na stavu
oblačnosti a zorného pole použitého objektivu. To je způsobeno tím, že tepelné záření z atmosféry
může být značně nehomogenní a to především při zvýšené oblačnosti. Za těchto situací je třeba
počítat s průměrnou hodnotou a uvažovat možnou nepřesnost ve stanovení tohoto parametru.
Nepřímá metoda je diskutována dále.
Obr. 11 Stanovení hodnoty zdánlivé odražené teploty na povrchu snímaného objektu. Zdánlivá
odražená teplota byla termokamerou stanovena jako -10,2 °C, tj. jako průměrná zdánlivá
teplota v obdélníkové oblasti uprostřed IR odražeče. Na první pohled je zřejmé, že jde
pouze o odhad, neboť maximální i minimální hodnoty v oblasti se od průměrné hodnoty
značně liší. Při tomto měření musela být emisivita v termokameře nastavena na
hodnotu 1.
Při stanovení odražené zdánlivé teploty tzv. přímou metodou dle ČSN ISO 18434-1 je termokamera
(obvykle) v blízkosti snímaného povrchu namířena svým objektivem přímo na zdroj záření, který
dopadá na snímaný povrch a toto záření tak snímá. I při tomto měření je emisivita v termokameře
nastavena na hodnotu 1 a vzdálenost na hodnotu 0. Průměrná hodnota zdánlivé teploty v předem
stanovené oblasti je pak danou hledanou hodnotou odražené zdánlivé teploty. Tento postup je
problematičtější, neboť je třeba předem znát hlavní zdroj odražené zdánlivé teploty a nasměrovat

termokameru na tento hlavní zdroj záření a stanovit příslušnou oblast měření. Je tedy třeba obvykle
postupovat z jistého modelu situace, který tyto údaje poskytuje.
Vzhledem k rozlehlosti měřeného povrchu (i desítky hektarů) při stanovování indexu vodního
stresu polních plodin, je třeba počítat s odlišnou hodnotou odražené zdánlivé teploty dle aktuální
oblačnosti nad různými částmi měřeného povrchu a pro přesné měření možnosti srovnání
jednotlivých částí ploch je třeba korigovat její vliv. Při ručním měření to znamená opakované
stanovení její hodnoty přímou či nepřímou metodou dle ČSN ISO 18434-1 na jednotlivých místech
měření.
Vhodnou inovaci přináší užitný vzor PUV 2017-31855. Zde je popsáno technické zařízení, u něhož
je k měření odražené zdánlivé teploty použita přímá metoda. Postup je takový, že s každým
radiometrickým snímkem povrchu měřeného objektu je uložena informace o zdánlivé teplotě
atmosféry nad tímto měřeným povrchem. Tento údaj je získán druhou LWIR termokamerou s
nižším rozlišením, která je namířena kolmo k atmosféře a snímá tak její tepelné záření, z něhož lze
stanovit zdánlivou teplotu atmosféry při nastavené emisivitě na hodnotu 1. Tato informace je
ukládána synchronně s jednotlivými termogramy snímaného povrchu.
Výše popsaným způsobem tak dochází k automatické korekci odražené zdánlivé teploty bez
nutnosti jejího stanovení v jednotlivých částech snímané plochy. Pro tyto účely však musí být
vybavena již měřicí sestava, jak je v užitném vzoru popsáno.
Z rovnice termografie vyplývá, že vzhledem k vysoké emisivitě většiny snímaných plodin je vliv
odražené zdánlivé teploty na výslednou naměřenou povrchovou teplotu poměrně malý. Ani tak
však tento vliv nelze zcela zanedbat, neboť při stanovení indexu vodního stresu je podstatné
vyhodnocení nejen absolutní teploty, ale i teplotních rozdílů, které mohou být řádově menší, než
jsou požadavky na absolutní přesnost měření. A pak i poměrně malá změna zdánlivé teploty
atmosféry, tedy v důsledku odražené zdánlivé teploty, může mít znatelný vliv na vyhodnocení
teplotních změn na snímaném povrchu. Typické hodnoty zdánlivé teploty atmosféry se mohou
pohybovat v poměrně širokém intervalu -40 °C až k teplotě, která je blízká atmosférické teplotě při
povrchu Země a to v závislosti na typu oblačnosti.
Parametry atmosféry
Stanovení atmosférické teploty, atmosférické vlhkosti a vzdálenosti mezi měřeným objektem a
termokamerou není obtížné a pro tyto účely jsou běžně dostupné vhodné měřicí přístroje. Při
nastavování těchto parametrů je většinou uvažována atmosféra za normálních podmínek, tj. s
homogenní teplotou, při normálním atmosférickém tlaku, běžného chemického složení bez
přítomnosti dalších příměsí apod.
Tato podmínka zajisté nemusí být splněna vždy. Při požadavcích na velmi vysokou opakovatelnost
měření je pak třeba vycházet z matematického modelu a zkoumat vliv jednak vlastního vyzařování
atmosféry, jednak vliv útlumu atmosféry na záření, které je vyzařováno ze snímaného povrchu.
Tato problematika je ale velmi náročná a v měřících přístrojích nejsou tyto modely obvykle
implementovány. Ovšem požadavky na opakovatelnost a přesnost měření pro stanovení indexu
vodního stresu polních plodin tyto modely nevyžadují. V případě nutnosti lze výpočty provést v
příslušném software na PC a následně provést korekci při uvažování jiného modelu atmosféry.
8. BEZPILOTNÍ SYSTÉM A JEHO KONFIGURACE
K nesení termokamery a provádění leteckého snímkování se používá jako prostředek tzv. bezpilotní
letadlo. Definice tohoto zařízení vychází z platné legislativy ČR, kde je uvedeno, že bezpilotní letadlo
(dále též dron nebo také UAV z anglického Unmanned Aerial Vehicle) je letadlo určené k provozu
bez pilota na palubě. Jedná se tedy o bezpilotní letecký prostředek, který může sloužit k nesení
termokamery a provádění leteckého snímkování za účelem stanovení indexu vodního stresu na
velkých plochách metodou bezdotykového měření teploty. Bezpilotní letadlo může být řízeno na
dálku nebo může realizovat let dle předem naprogramované trajektorie (tato možnost je obvykle
omezena legislativou na tzv. semi-automatický let, kdy bezpilotní letadlo realizuje stanovenou
trajektorii, je však stále pod dohledem operátora, který může řízení bezpilotního letadla kdykoliv
převzít). Bezpilotní systém (též UAS z anglického Unmanned Aircraft System) je systém skládající se
z bezpilotního letadla, řídící stanice a dalšího prvků či dalších prvků nezbytných k řízení či plánování
letu a nebo sběru dat.
Rozdělení bezpilotních letadel
Základní rozdělení bezpilotních letadel podle typu je na multikoptéry - bezpilotní letadla, která mají
několik vrtulí, které celou konstrukci drží ve vzduchu a udávají směr letu a křídla - bezpilotní letadla
“klasické konstrukce” s dvěma křídly. Multikoptéra je typ bezpilotního letadla - helikoptéry s
kolmým startem a přistáním, k čemuž mu slouží daný počet motorů a vrtulí. Na rozdíl od klasické

helikoptéry s jedním hlavním rotorem má rotorů několik. Podle počtu motorů dělíme multikoptéry
na: kvadrokoptéry (čtyři vrtule), hexakoptéry (šest vrtulí) a oktokoptéry (osum vrtulí).
Pro uložení vrtulí na ramenou bezpilotního letadla platí, že se sousední vrtule točí vždy opačným
směrem. Vrtule mohou být na multikoptéře také uloženy v úrovni nad sebou (proti sobě), tzn. že
na čtyřech ramenech může být osm vrtulí (vždy po dvou proti sobě). Čím větší je počet vrtulí, tím
více stoupá výkon multikoptéry a tím je stroj ve vzduchu stabilnější. Rovněž se zvyšuje bezpečnost
přistání a doletu, pokud dojde k poškození některého z motorů. Multikoptéry je možné používat
jak k manuálnímu létání, tak k semiautomatickým letům dle předem definované trajektorie. Hlavní
nevýhoda multikoptér oproti křídlům spočívá v tom, že multikoptéry mají ve vzduchu menší výdrž
než bezpilotní letadla s křídlem. Důvodem je jednak jejich větší hmotnost, ale také skutečnost, že
nemohou využívat vztlaku křídel a vzdušné termické proudy.
Hlavní výhodou multikoptér je především snadná manipulovatelnost a vysoká konfigurovatelnost
a to s ohledem na v současné době dostupné příslušenství. Vzlet křídla bývá náročný a nemusí se
vždy povést, především, pokud je provádět hodem z ruky (variantou je vzlet z odpalovací rampy).
Podle způsobu pohonu dělíme bezpilotní letadla na bezpilotní letadla poháněná spalovacími
motory a bezpilotní letadla poháněná bateriemi. Tato druhá varianta je častější a v současné době
se setkáváme především s bezpilotními letadly poháněnými Li-Pol (Lithium-Polymerové) bateriemi.
Rozdělení bezpilotních letadel podle hmotnosti je legislativní záležitostí a je třeba se za tímto
účelem vždy seznámit s platnou legislativou.
Legislativní dělení bezpilotních letadel podle hmotnosti a způsobu užití je uvedeno v Tabulce 1 v
Dodatku X
Bezpilotní systém pro účely stanovení indexu vodního stresu
Ucelenou sestavu bezpilotního systému za účelem stanovení indexu vodního stresu metodou
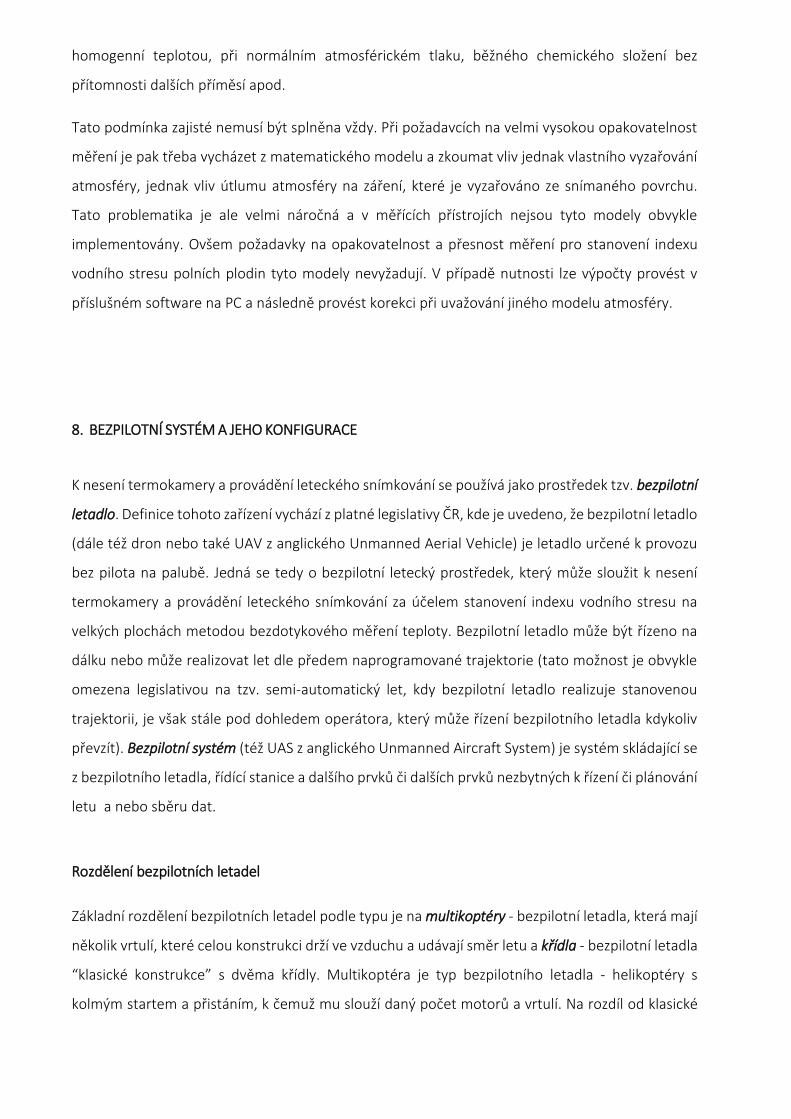
leteckého snímkování uvádí užitný vzor PUV 2017-31855. Zde je na obrázku 12 uveden bezpilotní
systém následující konfigurace: (1) bezpilotní letoun typu multikoptéra, (2) kardanův závěs
(gimbál), (3) LWIR termokamera pro stanovení indexu vodního stresu porostu s možností
simultánního ukládání termogramů a RGB snímků, (4) LWIR termokamera pro stanování tepelného
záření atmosféry za účelem stanovení odražené zdánlivé teploty snímkovaného povrchu, (5) GPS
senzor, (6) pozemní řídící stanice pro ovládání UAV (1) operátorem, (7) suchá a vlhká referenční
plocha a (9) pozemní meteorologická stanice. Nákres dále zachycuje celkovou situaci během
měření, tj. další prvky v nákresu jsou (10) tepelné záření atmosféry, (11) atmosféra mezi
snímkovaným povrchem (8) a termokamerou (3), (12) tepelné záření ze snímkovaného povrchu
(8). Klíčovou vlastností, kterou pro účely stanovení indexu vodního stresu polních plodin klademe
na bezpilotní systém je možnost propojení s GPS technologií a přesné ukládání GPS pozic
jednotlivých termogramů.
Obr. 12 Bezpilotního systému za účelem stanovení indexu vodního stresu metodou leteckého
snímkování uvádí užitný vzor PUV 2017-31855.
Požadavky na bezpilotní systém či bezpilotní letadlo určené pro letecké snímkování za účelem
vyhodnocení indexu vodního stresu jsou dány 1) požadavky na možnost umístění termokamery, tj.
především: dostatečná nosnost celé sestavy, odpovídající komunikační rozhraní (PWM, SBus a
další), snadná manipulovatelnost a možnost osazení vhodným gimbalem a dále 2) letovými
požadavky kladenými na stroj, tj. především: celková doba letu, možnost plánování trajektorie letu,
přítomnost padákového záchranného systému, počet vrtulí apod. Další požadavky na bezpilotní
systém může klást legislativa. Doplněk X například uvádí, že bezpilotní letadlo s maximálnívzletovou
hmotností větší než 0,91 kg musí být vybaveno vestavěným bezpečnostním systémem, který při
poruše provede ukončení letu. Legislativa stanovuje i požadavky na značení. Bezpilotní letadlo musí
být označeno ohnivzdorným identifikačním (ID) štítkem se jménem a telefonním číslem
provozovatele a poznávací ́značkou.
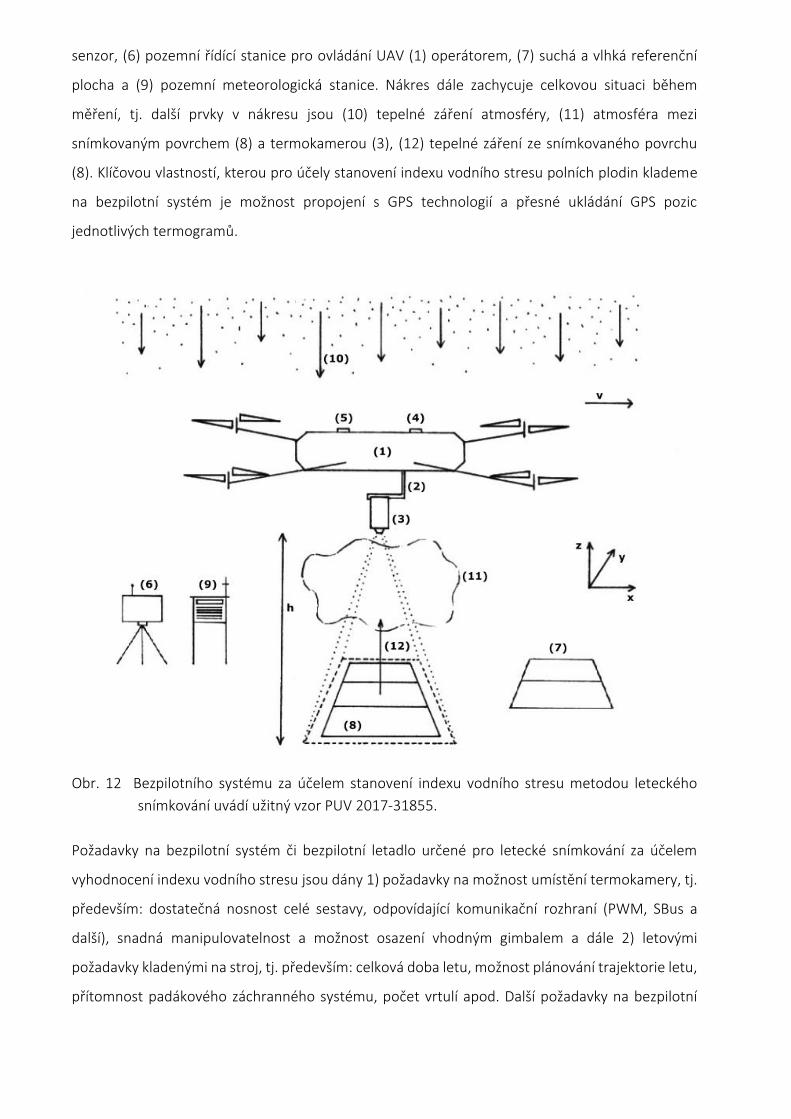
Testovaným, komerčně dostupným bezpilotním systémem, vhodným pro účely stanovení indexu
vodního stresu metodou leteckého snímkování, byla sestava se strojem DJI M600 Pro (obr. 13). Jde
o hexakoptéru se vzletovou hmotností přibližně 10 kg a dobou letu cca 25 až 30 minut s maximální
rychlostí 18 m/s. Napájení je zajištěno šesti inteligentními Li-Pol bateriemi. Jako termokamera byl
použit přístroj Workswell WIRIS s bispektrálním snímkováním v RGB a LWIR spektru. Přenos obrazu
z termokamery byl zajištěn prostřednictvím DJI Lightbridge 2 s následným zobrazením v aplikaci DJI
GO a DJI Ground Station, kde bylo možné zároveň předem naplánovat celou trajektorii letu, ovládat
bezpilotní letadlo i měnit jeho jednotlivá nastavení.
Obr. 13 Komerčně dostupná hexakoptéra DJI M600 Pro jako součást bezpilotního systému pro
stanovení indexu vodního stresu metodou leteckého snímkování za použití termokamery
Workswell WIRIS pro stanovení povrchové teploty polních plodin.

9. SBĚR DAT
Z hlediska sběru dat je třeba zohlednit především: výšku letu (která určuje vzdálenost mezi
měřeným objektem a termokamerou a ve výsledku tedy geometrické rozlišení), úhel měření,
nastavení parametrů měření, nutnost správného managementu provádění NUC (Non Uniformity
Correction) a teplotní stabilizace termokamery. Důležité je také správné nastavení teplotního
rozsahu, teplotní stupnice (včetně režimu stupnice) a volba palety.
Metodika sběru radiometrických dat
Při sběru radiometrických dat je nezbytné dodržovat jisté metodické postupy tak, aby dosažené
výsledky byly dostatečně kvalitní pro další kvantitativní i kvalitativní vyhodnocení, tj. především
stanovení povrchové teploty a následného stanovení indexu vodního stresu snímaných polních
plodin.
Úhel měření
Emisivita většiny materiálů je funkcí úhlu měření, tj. odklonu termokamery od normály snímaného
povrchu. Jako přijatelný úhel snímání je považován odklon od normály snímaného povrchu o
velikosti 5° až 15°, pro větší úhly se již může značně měnit emisivita materiálu (s rostoucím
odklonem od normály obvykle pro většinu materiálů emisivita klesá). Pokud je dosaženo právě úhlu
5° až 15°, zamezuje se navíc odrazu tepelného záření měřicí aparatury. S tímto zářením je třeba
počítat při kolmém měření, kdy se do měřicí aparatury odráží z měřeného povrchu zpět a je třeba
jej korigovat. Emisivita většiny biologických a přírodních materiálů je vysoká a podstatným
způsobem neklesá ani při odklonu od normály ve velikosti 30° a případně i více.
Dosažení teplotní homogenity termogramu
Pokud měření ruční termokamerou probíhá delší dobu, vzhledem například k rozlehlejšímu
povrchu, je třeba počítat s teplotním driftem termokamery a nutností provádění opakovaného
NUC. To výrazně zhoršuje možnost srovnání stavu jednotlivých ploch a následného stanovení
indexu vodního stresu na těchto plochách. Významnou roli také hraje dosažení teplotní stabilizace
termokamery.
Teplotní stabilizace termokamery obvykle trvá 7 až 15 minut. Během tohoto procesu je
termokamera zapnuta a dochází k ohřevu vnitřní elektroniky, naměřené teploty i homogenita
termogramu se mohou při tomto procesu měnit (Minkina et al. 2009). Pokud dojde k orosení
objektivu, je třeba se této vody zbavit ostřením objektivu jemným hadříkem, neboť i poměrně
tenký povlak vody je pro infračervené záření v pásmu LWIR prakticky neprůhledný.
Obr. 14 Nehomogenita v termogramu po provedení NUC (vlevo) a před provedením NUC (vpravo)
znázorněná pomocí funkce teplotní profil z jednoho rohu termogramu do druhého. Jedná
se o termogram prakticky teplotně homogenního povrchu. Před provedením NUC je z
jednoho rohu do druhého rozdíl mezi maximální (34 °C) a minimální hodnotou (31 °C)
teploty cca 3 °C, v praxi může být ale i výrazně větší. Po provedení NUC klesla
nehomogenita na cca 1°C, v praxi ale může být tato hodnota ještě menší.
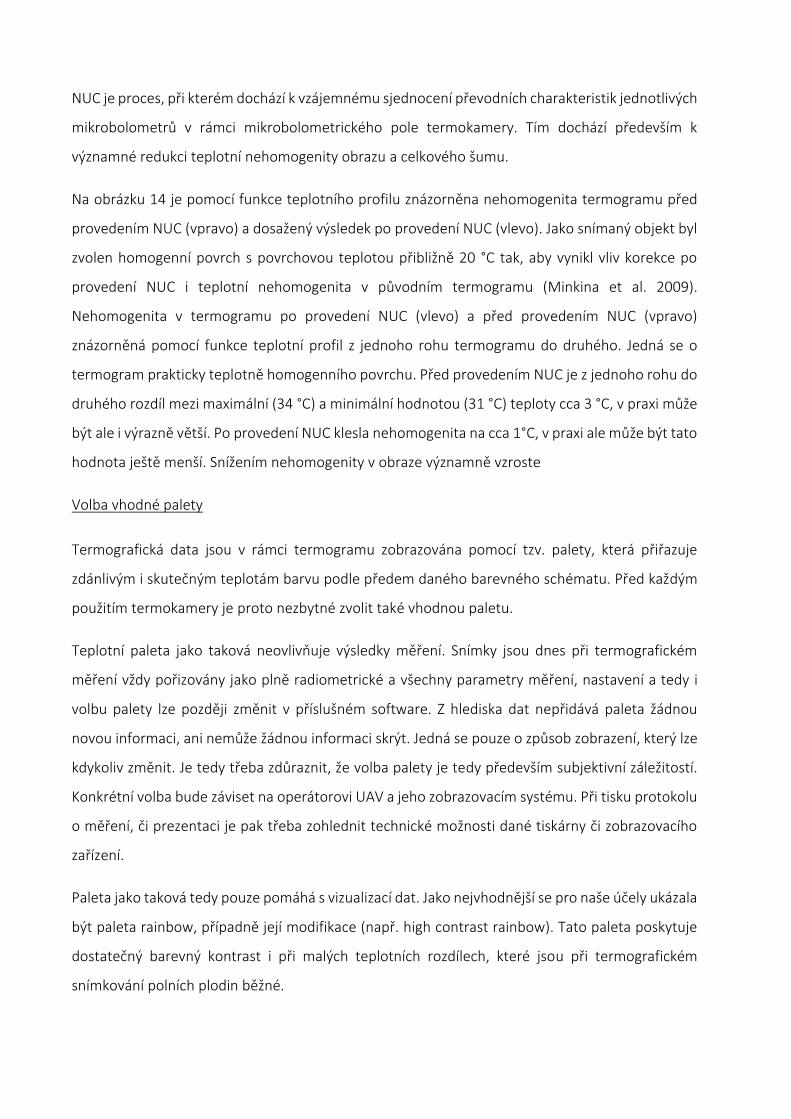
NUC je proces, při kterém dochází k vzájemnému sjednocení převodních charakteristik jednotlivých
mikrobolometrů v rámci mikrobolometrického pole termokamery. Tím dochází především k
významné redukci teplotní nehomogenity obrazu a celkového šumu.
Na obrázku 14 je pomocí funkce teplotního profilu znázorněna nehomogenita termogramu před
provedením NUC (vpravo) a dosažený výsledek po provedení NUC (vlevo). Jako snímaný objekt byl
zvolen homogenní povrch s povrchovou teplotou přibližně 20 °C tak, aby vynikl vliv korekce po
provedení NUC i teplotní nehomogenita v původním termogramu (Minkina et al. 2009).
Nehomogenita v termogramu po provedení NUC (vlevo) a před provedením NUC (vpravo)
znázorněná pomocí funkce teplotní profil z jednoho rohu termogramu do druhého. Jedná se o
termogram prakticky teplotně homogenního povrchu. Před provedením NUC je z jednoho rohu do
druhého rozdíl mezi maximální (34 °C) a minimální hodnotou (31 °C) teploty cca 3 °C, v praxi může
být ale i výrazně větší. Po provedení NUC klesla nehomogenita na cca 1°C, v praxi ale může být tato
hodnota ještě menší. Snížením nehomogenity v obraze významně vzroste
Volba vhodné palety
Termografická data jsou v rámci termogramu zobrazována pomocí tzv. palety, která přiřazuje
zdánlivým i skutečným teplotám barvu podle předem daného barevného schématu. Před každým
použitím termokamery je proto nezbytné zvolit také vhodnou paletu.
Teplotní paleta jako taková neovlivňuje výsledky měření. Snímky jsou dnes při termografickém
měření vždy pořizovány jako plně radiometrické a všechny parametry měření, nastavení a tedy i
volbu palety lze později změnit v příslušném software. Z hlediska dat nepřidává paleta žádnou
novou informaci, ani nemůže žádnou informaci skrýt. Jedná se pouze o způsob zobrazení, který lze
kdykoliv změnit. Je tedy třeba zdůraznit, že volba palety je tedy především subjektivní záležitostí.
Konkrétní volba bude záviset na operátorovi UAV a jeho zobrazovacím systému. Při tisku protokolu
o měření, či prezentaci je pak třeba zohlednit technické možnosti dané tiskárny či zobrazovacího
zařízení.
Paleta jako taková tedy pouze pomáhá s vizualizací dat. Jako nejvhodnější se pro naše účely ukázala
být paleta rainbow, případně její modifikace (např. high contrast rainbow). Tato paleta poskytuje
dostatečný barevný kontrast i při malých teplotních rozdílech, které jsou při termografickém
snímkování polních plodin běžné.
Práce s teplotní stupnicí
Dnes je již v termografii standardem, že teplotní stupnice termokamery může být provozována ve
dvou režimech: automatickém a manuálním. Při automatickém režimu dochází ke změně horní a
dolní meze stupnice tak, aby se teplotní stupnice nastavila pro zobrazení nejteplejší a nejstudenější
oblasti v termogramu. Při nastavení teplotní stupnice na tento automatický režim dochází k
automatickému přenastavení horní i dolní meze stupnice a to podle změn teplot ve snímané scéně.
Určité hodnotě skutečné či zdánlivé teploty pak v různých okamžicích odpovídají různé barvy z
barevné palety. To může být pro naše účely nevhodné, neboť neustálé změny v barevnosti snižují
interpretační schopnosti a schopnost posouzení problému.
Nastavení stupnice do manuálního režimu je pro účely mapování indexu vodního stresu polních
plodin obvykle vhodnější. Je třeba ale správné nastavení horní a dolní meze stupnice. Během letu
pak může dojít k úpravě těchto mezí a to například, pokud celé snímkování trvá déle a je třeba
přizpůsobit nastavení rozsahu například ohřevu půdy, ke kterému došlo působením Slunce apod.
K ideálnímu nastavení horní a dolní meze stupnice lze dospět například při orientačním obletu
prvního hektaru, kdy jsou z pořízených dat stanoveny hodnoty povrchové teploty porostu i půdy
(tu považujeme za “pozadí”). Hodnoty mezí je pak třeba nastavit s určitou tolerancí a především
tak, aby operátorovi UAV přišlo nastavení účelné.
Nastavení teplotní stupnice neovlivňuje nastavení teplotního rozsahu. Termokamera může mít
jeden či více teplotních rozsahů (např. -20 °C až 250 °C a 0 °C až 650 °C). Termogram je
termokamerou uložen vždy v daném teplotním rozsahu (toto nastavení již nelze, na rozdíl od celé
řady dalších nastavení, měnit po pořízení snímku). Teplotní stupnici však lze kdykoli měnit a
nastavovat její horní i dolní mez a to v rámci mezí, které jsou dány teplotním rozsahem.
Teplotní rozsah termokamery nastavujeme na nejnižší možný. Ten poskytuje nejlepší teplotní
citlivost i přesnost měření. Obvykle se tento rozsah pohybuje přibližně v intervalu -20°C až 250 °C
nebo -20 °C až 120 °C.
Stanovení výšky letu
Důležitým parametrem snímkování je stanovení vhodné výšky letu. K tomu je třeba stanovit
požadované geometrické rozlišení pro snímky pořízené termokamerou. V případě bispektrálního
systému (dnes nejobvyklejší konfigurace), kdy je součástí jednoho zařízení RGB kamera ve

viditelném spektru a LWIR termokamera (a snímky z obou kamer jsou ukládány simultánně), je
výška letu vždy stanovena s ohledem na parametry termokamery a to ze dvou důvodů: 1)
termokamera má obvykle nižší rozlišení senzoru (a tím i geometrické rozlišení) a dále 2)
kvantitativní požadavky jsou kladeny na termokameru, nikoli na RGB kameru.
Aby došlo ke spolehlivému stanovení povrchové teploty určitého objektu (tedy o užití přístroje -
termokamery pro kvantitativní termografii), musí objektiv kamery promítnout pozorovanou oblasti
či objekt, jehož teplotu je třeba stanovit, na oblast detektoru, která odpovídá fyzické rozloze o
velikosti alespoň 3x3 pixelu mikrobolometru typu FPA (Focal Plane Array). K výpočtu lze použít
následující vzorce (1), (2) (Vollmer et al. 2010). Vzorec je uveden zvláště pro vertikální rozměr a
zvláště pro horizontální rozměr tak, jak je v oboru zvykem. Při výpočtu nás zajímá h maximální
horizontální, resp. v maximální vertikální rozměr předmětu, který bude celý zobrazen na detektor
termokamery, tj.
ℎ = 2𝑑. 𝑡𝑔 (ℎ𝑓𝑜𝑣
2) (6)
resp.
𝑣 = 2𝑑. 𝑡𝑔 (𝑣𝑓𝑜𝑣
2) (7)
kde, hfov je horizontální zorné pole a vfov je vertikální zorné pole udávaného u objektivu
termokamery, d je vzdálenost mezi termokamerou a snímaným objektem, pro niž jsou hodnoty h
a v stanoveny. Abychom získali údaj pro jeden pixel, je třeba vydělit hodnotu h a v odpovídajícím
počtem horizontálních a vertikálních pixelů.
Nyní zbývá diskutovat metodiku pro stanovení požadovaného prostorového rozlišení, resp.
požadavek na plochu, která musí být promítnuta na oblast detektoru o velikosti minimálních 3x3
pixelu. To bohužel není parametr, který by bylo možné určit obecně, neboť je především závislý na
typu porostu (a např. velikosti listů), hustotě porostu a jeho vzrůstu. Vhodnou výšku letu je tak
třeba stanovit experimentálně. V praxi se osvědčil empiricky osvojený postup, kdy je maximální
výška letu stanovena tak, aby pro oblast alespoň 12x12 pixelů byla v místě porostu povrchová
teplota na porostu homogenní, tj. bez velkých teplotních změn na samotném povrchu porostu a
bez prosvítání půdy. K tomuto účelu lze použít běžně dostupnou funkci “oblast” s nastavením pro
současné měření minimální i maximální teploty v oblasti.
Plánování trajektorie letu a překryv snímků
Trajektorie letu je možné předem naplánovat například pomocí aplikace DJI Ground Station, viz
obr. 15. Hovoříme pak o automatickém systému řízení letu. Aplikace umožňuje i odhad
předpokládané časové náročnosti letu, což je velmi důležitý údaj vzhledem k omezené výdrži
baterií. Při plánování je třeba počítat s tím, že návrat bezpilotního letadla by měl nastat dříve, než
indikátor stavu baterie poklesne na hodnotu 20%. Následuje výměna baterií. Vedle aplikace DJI
Ground Station existuje celá řada dalších aplikací určených pro plánování letu a sběru dat s velmi
podobnými funkcemi.
Během letu lze pak buď 1) provádět termokamerou automatické snímkování a to na základě změny
souřadnice UAV, nebo na základě časové změny, nebo 2) zaznamenávat radiometrické videa po
celou dobu letu s automatickou anotací GPS souřadnice ke každému pořízenému snímku a
jednotlivé snímky z videa pak získat buď ručně, nebo automaticky na základě vyhodnocené změny
GPS souřadnice.
Rozestup mezi snímky je třeba volit tak, aby mezi jednotlivými snímky byl překryv alespoň 70% a to
jak v souřadnici x, tak v souřadnici y. Větší překryv nevadí, ale prodlužuje délku letu a zvyšuje nároky
na zpracování i archivaci dat. Maximální možný posuv, tak aby byl dodržen požadavek na minimální
překryv snímků, v obou směrech pak lze určit ze vztahů (1) a (2). V aplikacích pro plánování letu
jsou tyto vzorce již obvykle implementovány a software je tak schopen při zadání modelu kamery,
požadovaného překryvu snímků a požadovaného geometrického rozlišení, stanovit optimální výšku
i rychlost letu.
Obnovovací (obrazová) frekvence se u termokamer pro bezpilotní letadla pohybuje v rozmezí 9 až
30 Hz. Tj. taková termokamera je schopna pořídit 9 až 30 snímků za sekundu. S tím je potřeba
počítat při plánování letu a volit rychlost letu s ohledem na to, aby bylo možné pořídit snímky s
požadovaným překryvem. Stran legislativy je při plánování letu třeba pamatovat, že právně závazný
Doplněk X říká, že použití automatických systémů̊ řízení letu nezbavuje pilota odpovědnosti za
bezpečné provedení celého letu.
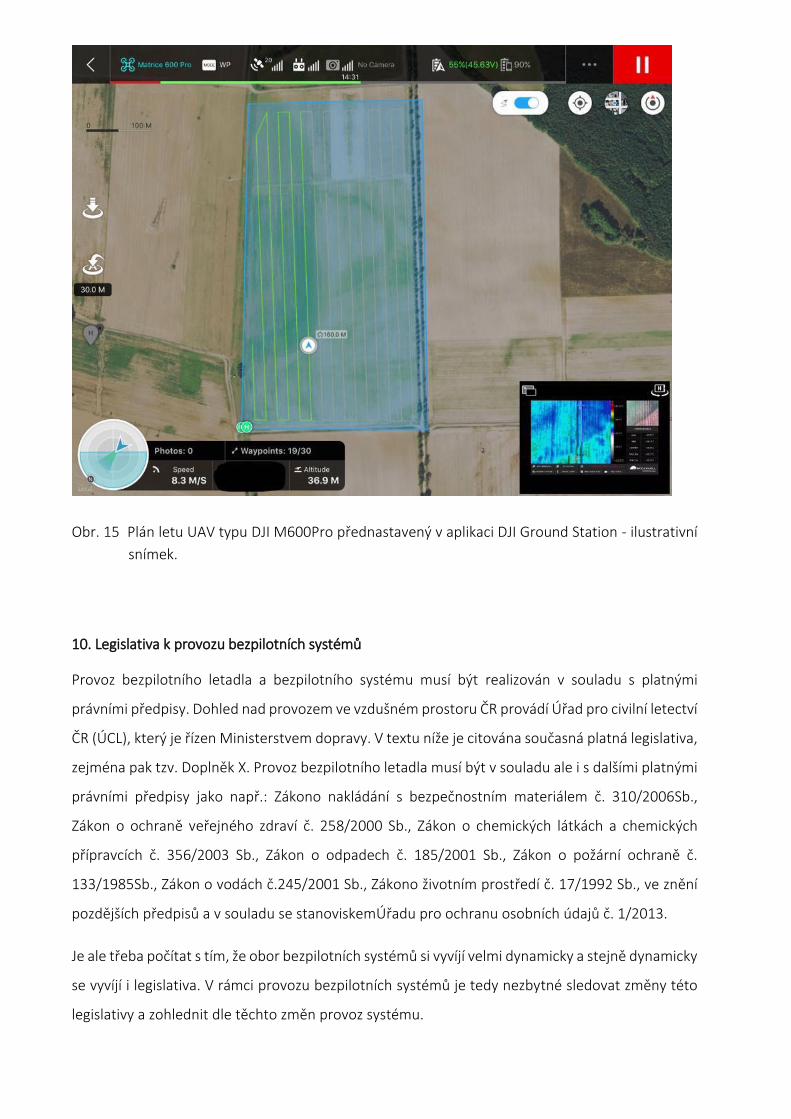
Obr. 15 Plán letu UAV typu DJI M600Pro přednastavený v aplikaci DJI Ground Station - ilustrativní
snímek.
10. Legislativa k provozu bezpilotních systémů
Provoz bezpilotního letadla a bezpilotního systému musí být realizován v souladu s platnými
právními předpisy. Dohled nad provozem ve vzdušném prostoru ČR provádí Úřad pro civilní letectví
ČR (ÚCL), který je řízen Ministerstvem dopravy. V textu níže je citována současná platná legislativa,
zejména pak tzv. Doplněk X. Provoz bezpilotního letadla musí být v souladu ale i s dalšími platnými
právními předpisy jako např.: Zákono nakládání s bezpečnostním materiálem č. 310/2006Sb.,
Zákon o ochraně veřejného zdraví č. 258/2000 Sb., Zákon o chemických látkách a chemických
přípravcích č. 356/2003 Sb., Zákon o odpadech č. 185/2001 Sb., Zákon o požární ochraně č.
133/1985Sb., Zákon o vodách č.245/2001 Sb., Zákono životním prostředí č. 17/1992 Sb., ve znění
pozdějších předpisů a v souladu se stanoviskemÚřadu pro ochranu osobních údajů č. 1/2013.
Je ale třeba počítat s tím, že obor bezpilotních systémů si vyvíjí velmi dynamicky a stejně dynamicky
se vyvíjí i legislativa. V rámci provozu bezpilotních systémů je tedy nezbytné sledovat změny této
legislativy a zohlednit dle těchto změn provoz systému.
Doplněk X
Dne 1.3.2012 vešel v platnost tzv. Doplněk X k předpisu L2 dle ustanovení § 102 odst. 2 zákona
49/1997Sb. o civilním letectví. Doplněk stanovuje závazné národní požadavky na projektování,
výrobu, údržbu, změny a provoz bezpilotních systémů splňujících kritéria přílohy II nařízení
Evropského parlamentu a Rady (ES) č. 216/2008 v platném znění. Doplněk X zavádí pojem
„bezpilotní letadlo“ a pro jeho provoz stanovuje podmínky obvyklé v pilotovaném letectví. Doplněk
X vyděluje letecké modelářství od komerčního využití dálkově ovládaných strojů. Dálkově ovládané
letadlo využívané pro čistě sportovní, rekreační a soutěžní účely je nazýváno modelem letadla,
zatímco bezpilotní letadlo je doplňkem definováno stroj, který je užíván ke komerčním účelům.
Povolení k létání, evidence letů a letadel Základní podmínkou provozu bezpilotního systému je povolení k létání vydané ÚCL, podrobnosti
stanovuje Doplněk X k předpisu L2 dle ustanovení § 102 odst. 2 zákona 49/1997Sb. o civilním
letectví. Bezpilotní letadlo i jeho pilot podléhají evidenci ÚCL.
Pilot musí zaznamenávat informace o letu do deníku letadla nebo rovnocenného dokumentu.
Informace musí obsahovat datum letu, jméno pilota, označení letadla, místa vzletu a přistání, dobu
letu a celkovou dobu letu, druh letové činnosti a potenciální události související s bezpečností letu.
Povolení k létání nahrazuje doklad o osvědčení letové způsobilosti a je dokladem o evidenci
bezpilotního systému. Povolení k létání obsahuje seznam evidovaných pilotů a nahrazuje tak průkaz
způsobilosti pilota. Podmínkou provozování leteckých prací (LP) a leteckých činností pro vlastní
potřebu (LČPVP) je pak povolení k provozování těchto činností vydané ÚCL. Dále žadatel o povolení
k létání bezpilotního letadla k jiným, než rekreačně-sportovním účelům je povinen k žádosti doložit
provozní příručku daného bezpilotního systému.
Bezpečnost letu Let s bezpilotním letounem smí být prováděn jen takovým způsobem, aby nedošlo k ohrožení
bezpečnosti létání ve vzdušném prostoru, osob a majetku na zemi a životního prostředí.
Let proto není možné provádět kdekoli a kdykoli. Bezpilotní letadlo se, s výjimkou kdy ÚCL povolí
jinak, nesmí: 1) v průběhu vzletu a přistání přiblížit k jakékoliv osobě jiné než jeho pilot na

horizontální vzdálenost menší než 50 m; 2) za letu přiblížit k jakékoliv osobě, prostředku nebo
stavbě, které nejsou součástí předmětného provozu, na horizontální vzdálenost menší než 100 m;
3) za letu přiblížit k jakémukoliv hustě osídlenému prostoru na horizontální vzdálenost menší než
150 m. Podrobnosti k členění jednotlivých prostorů, maximálním možným vzdálenostem,
maximální výšce letu apod., jsou uvedeny v Doplňku X.
S výjimkou, kdy ÚCL povolí jinak, musí být bezpilotní letadlo provozováno v přímém dohledu pilota,
tj. takovým způsobem a do takové vzdálenosti, aby: a) pilot během pojíždění a letu mohl udržovat
trvalý vizuální kontakt s bezpilotním letadlem i bez vizuálních pomůcek jiných než brýle a kontaktní
čočky na lékařský předpis; a b) pilot, nebo kromě pilota i poučená osoba, mohl sledovat a
vyhodnocovat dohlednost, překážky a okolní ́ letový ́ provoz. S výjimkou, kdy tak povolí ÚCL na
základě předchozího souhlasu příslušného správního orgánu či oprávněné osoby, se let
bezpilotního letadla nesmí provádět v ochranných pásmech stanovených příslušnými právními
předpisy podél nadzemních dopravních staveb, tras nadzemních inženýrských sítí, tras nadzemních
telekomunikačních sítí, uvnitř zvláště chráněných území, v okolí vodních zdrojů a objektů důležitých
pro obranu státu. Nad těmito ochrannými pásmy smí být let prováděn pouze způsobem vylučujícím
jejich narušení za běžných i mimořádných okolností.
Bezpilotní letadlo musí být vybaveno vestavěným bezpečnostním systémem („failsafe“ systém),
který při selhání řídícího a kontrolního spoje provede ukončení letu.
III. SROVNÁNÍ NOVOSTI PŘÍSTUPŮ
Metoda detekce vodního stresu polních plodin je zcela originální z hlediska možnosti rychlého,
operativního a opakovatelného hodnocení velkých zemědělských ploch. Umožňuje sledovat
časoprostorovou dynamiku spojenou se změnami dostupnosti vody rostlinám a na základě těchto
informací přijímat odpovídající rozhodnutí a realizovat cílená opatření okamžitého i dlouhodobého
charakteru. Tradiční metody spojené se vzorkováním rostlin či půdy jsou časově náročné, přičemž
j vázaná vždy na bodové odběry a případnou interpolaci v rámci ploch, kde muže docházet
k významnému zkreslení. Přístup založený na distančním snímání termokamerou je vysoce plošně
specifický a umožňuje generování mapových podkladů pro koncové aplikace lokálně řízených
závlah, kompenzačního dusíkatého hnojení, segmentace z hlediska dostupnosti vody či
vyhodnocení rozsahu poškození suchem.
IV. POPIS UPLATNĚNÍ CERTIFIKOVANÉ METODIKY
Metodika může najít uplatnění v zemědělských službách zaměřených na poskytování podpory při
sběru a analýze dat pro precizní zemědělství, v praxi integrované produkce, řízení a kontrole
závlahových systémů a jejich účinnosti. Metodika může sloužit v rámci programů technicky,
zemědělsky a přírodovědně zaměřeného středoškolského, vysokoškolského a postgraduálního
vzdělávání zaměřeného při výuce studentů. V neposlední řadě může metodika najít uplatnění ve
státní správě (SRS, AOPK ČR).
IV. EKONOMICKÉ ASPEKTY
Použití nově vyvinutých metod přináší především úsporu pracovní síly, ale také kvalitativně nový
náhled, neboť v současné době neexistuje metoda, kterou by bylo možné stanovovat index
vodního stresu na velkých plochách, tj. v rozsahu jednotek až desítek hektarů. Jiné metody než
metody založené na termografii poskytují možnost pouze bodového měření indexu vodního stresu
a tedy nepředstavují relevantní srovnání.
Hlavní položky sestavy pro stanovení indexu vodního stresu polních plodin leteckou termografií
představuje pořízení přístrojové techniky, tj.: 1) nákup termokamery s dostatečnou teplotní
citlivostí a stálostí a dále softwarového vybavení, to vše v celkové ceně cca 200 000 Kč až 250 000
Kč bez DPH a dále 2) pořízení vhodné bezpilotní platformy v ceně cca 150 000 Kč bez DPH. Celkové
náklady na celý systém pak činí cca 400 000 Kč bez DPH. Jak termokamera, tak především bezpilotní
platforma mohou být pořízeny univerzálně a sloužit i k dalším účelům, tj. například laboratornímu
nebo procesnímu bezdotykovému měření teploty v případě termokamery, nebo k RGB či
multispektrálního snímkování v případě bezpilotní platformy.
Finanční náklady na pořízení samostatné ruční kamery pro pozemní snímkování s odpovídajícími
parametry a schopností anotovat GPS souřadnicemi činí cca 250 000 Kč. Tyto ruční termokamery
jsou však obecně univerzálnější (vzhledem ke své konstrukci) a nelze tak provést přímé cenové
srovnání této části nákladu.
Ekonomické srovnání můžeme provést na ploše o velikosti např. 1 ha pomocí pozemního
snímkování (ruční termokamera) a leteckého snímkování. Testy ukázaly, že pozemní snímkování
plochy o velikosti 1 ha trvá přibližně 15 hodin a situaci významně zesložiťuje skutečnost, že nelze
správně odhadnout trajektorii, správný překryv snímků a vzniká několikařádově větší množství dat.
Oproti tomu je stejná plocha při leteckém snímkování nasnímána přibližně za 30 minut (pokud
nezahrnujeme čas potřebný na přípravu a následné sbalení techniky – cca 30 minut). Letecké
snímkování je tedy časově 30x úspornější.
V. SEZNAM POUŽITÉ LITERATURY
Brom J., Nedbal V., Duffková R., Fučík P., Křováková K. 2017. Identifikace kritických zdrojových lokalit pro oblast Kojčice. Soubor specializovaných map s odborným obsahem. 28 s. ISBN 978-80-7394-683-8. DeJonge K.C., Taghvaeian S., Trout TJ., Comas L.H. 2015.Comparison of canopy temperature-based water stress indices for maize. Agricultural Water Management, 156, 51-62. Duffková R., Brom J., Žížala D., Zemek F, Procházka J., Nováková E., Zajíček A., Kvítek T. 2012. Určení infiltračních oblastí pomocí vodního stresu vegetace na základě dálkového průzkumu Země a pozemních měření. Certifikovaná metodika. VÚMOP, v.v.i., Praha 2018. ISBN: 978-80-87361-15-3 Gago J., Douthe C., Coopman R.E., Gallego P.P., Ribas-Carbo M., Flexas J., Escalona J., Medrano H. 2015. UAVs challenge to assess water stress for sustainable agriculture. Agricultural Water Management, 153, 9-19.
Han M., Zhang H., DeJonge K.C., Comas L.H., Trout T.J. 2016. Estimating maize water stress by standard deviation of canopy temperature in thermal imagery, Agricultural Water Management, 177, 400-409. Idso S.B. 1982. Non-water-stressed baselines: a key to measuring and interpreting plant water stress. Agric. Meteorol. 27, 59-70. Idso S.B.; Jackson R.D.; Pinter P.J. Jr.; Reginato R.J.; Hatfield J.L. (1981). Normalizing the stress-degree-day parameter for environmental variability. Agric. Meteorol. 24, 45–55. Idso, S. B., Jackson, R. D., Reginato, R. J. 1977. Remote-sensing of crop yields. Science 196, 19-25. Jackson R. D., Idso S. B., Reginato R. J., Pinter P. J. Jr. 1981. Canopy temperature as a crop water stress indicator. Water Resource Research 17, 1133-1138. Ihuoma S.O., Madramootoo Ch.A. 2017. Recent advances in crop water stress detection. Computers and Electronics in Agriculture, 141,267-275. Brant, V., Kroulík, M., Škeříková, M., Zábranský, P., Sova, J., Lukáš, J. (2017): Využití termometrie v rostlinné výrobě. Mechanizace zemědělství. 65 (5). 68 – 71. Sadeghi A.M., Starr J.L., Teasdale J.R., Rosecrance R.C., Rowland R,A. (2007): Real-time soil profile water content as influenced by weed-corn competition. Soil Science, 172: 759–769. Dailey C.D., Bernards M.L., Kells J.J. (2006): Effect of water removal timing and row spacing on soil moisture in corn. Weed Technology, 20:399–409. Azeez O.J., Chikoye D., Kamara A.Y., Menkir A., Adetunji M.T. (2005) Effect of drought and weed management on maize genotypes and the tensiometric soil water content of an eutric nitisol in south western Nigeria. Plant and Soil 276, 61–68 Brant, V., Pivec, J., Hamouzová, K., Zábranský, P., Satrapová, J., Škeříková, M. 2014. Determination of the influence of herbicides on dicotyledons plant transpiration using the sap flow method. Plant Soil Environment. 60, 562 – 568. Eitel J. & Gessler P. & Smith M.S., Alistair & Robberecht R.(2006). Suitability of existing NIR and novel SWIR spectral indices to remotely detect water stress in Populus spp. Forest Ecology and Management. 229. 170-182. Elvidge C. & Lyon J.P. R. (1985). Influence of rock-soil spectral variation on the assessment of green biomass. Remote Sensing of Environment, 17, 265-279. Elvanidi A., Katsoulas N., Bartzanas T., Ferentinos K.P., Kittas C. (2017). Crop water status assessment in controlled environment using crop reflectance and temperature measurements. Precision Agriculture. 18 (3), 332-349. Gamon J. & Serrano L. & Surfus J.S.. (1997). The Photochemical Reflectance Index: An Optical Indicator of Photosynthetic Radiation Use Efficiency across Species, Functional Types, and Nutrient Levels. Oecologia. 112. 492-501.
Gao B. (1996). NDWI—A normalized difference water index for remote sensing of vegetation liquid water from space. Remote Sensing of Environment, Volume 58, Issue 3, 257-266. Haboudane D. & Miller J. & Tremblay N. & Zarco-Tejada P. & Dextraze L. (2002). Integrated narrow-band vegetation indices for prediction of crop chlorophyll content for application to precision agriculture. Remote Sensing of Environment, 81, 416-426. Hardisky M. A., Klemas V., and Smart R.M. (1983). The influence of soil salinity, growth form, and leaf moisture on the spectral radiance of Spartina alterniflora canopies, Photogram. Eng. Remote Sens., 49, 77–83. Hernández-Clemente R., Navarro-Cerrillo R.M., Suárez L., Morales F., Zarco-Tejada P.J. (2011) Assessing structural effects on PRI for stress detection in conifer forests. Remote Sensing of Environment 115 (2011) 2360–2375 Hunt E. R., Rock B. N. (1989). Detection of changes in leaf water content using Near- and Middle-Infrared reflectances. Remote Sensing of Environment, Volume 30, Issue 1, 43-54. Berni J., Jose A. & Zarco-Tejada P. & Suárez L. & FereresE. (2009). Thermal and Narrowband Multispectral Remote Sensing for Vegetation Monitoring From an Unmanned Aerial Vehicle. Geoscience and Remote Sensing, IEEE Transactions on. 47. 722 - 738. Penuelas J., Pinol J., Ogaya R. & Filella I. (1997). Estimation of plant water concentration by the reflectance Water Index WI (R900/R970). International Journal of Remote Sensing, Volume 18, Issue 13, 2869-2875. Rouse J.W., Haas R.H., Schell J.A., and Deering D.W. (1974). Monitoring vegetation systems in the Great Plains with ERTS, In: S.C. Freden, E.P. Mercanti, and M. Becker (eds) Third Earth Resources Technology Satellite–1 Syposium. Volume I: Technical Presentations, NASA SP-351, NASA, Washington, D.C., pp. 309-317. RougeanJ.L., Breon F.M. (1995). Estimating PAR absorbed byvegetation from bidirectional reflectance measurements. Remote Sensing of Environment, 51, 375–384. Rondeaux G., Steven M., Baret F. (1996). Optimization of soil-adjusted vegetation indices. Remote Sensing of Environment 55,95–107. Zarco-Tejada P. & Ustin S. (2001). Modeling canopy water content for carbon estimates from MODIS data at land EOS validation sites. Proceeding of the 2001 international geoscience and remote sensing symposium. Vol. 1. 342 – 344. VI. Seznam publikací, které předcházely metodice
Haberle J., Svoboda P., Neumannová A., Kurešová G., Raimanová I. 2018a: The impact of water shortage on wheat cultivars traits and canopy temperature in field experiment. In. XV ESA Congress, 28-31.8.2018 Ženeva, Švýcarsko, 2 s.

Haberle J., Svoboda P., Šimon T., Lukáš J., Kurešová G., Křížová K., Madaras M. 2018b: Plant growth indicates soil spatial variability related to water shortage and nitrate leaching vulnerability. In: 20th Nitrogen Workshop, Rennes, Francie 25-27.7.2018, 1-2 (CD). Haberle J., Lukáš J., Sova J., Svoboda P., Kurešová G., Neumannová A. 2017: Využití termosnímků pro hodnocení dopadu odlišné dostupnosti vody u pšenice. In: Aplikace radiometrických dat v rostlinné produkci (ed. Lukáš J.), VÚRV, v.v.i., Praha, 1.12.2017. 12 s.