Embed Size (px)
Citation preview
T.C.
KOCAEL Đ ÜNĐVERSĐTESĐ
MÜHEND ĐSLĐK FAKÜLTES Đ
ELEKTRON ĐK VE HABERLE ŞME MÜHEND ĐSLĐĞĐ
KABLOSUZ ALGILAYICI UYGULAMASI
(OSĐLOMETR ĐK ÖLÇÜM YÖNTEM Đ ĐLE KABLOSUZ TANS ĐYON ALET Đ)
BĐTĐRME TEZ Đ
Tevfik KADIO ĞLU
020207024
TEZ YÖNET ĐCĐSĐ: Prof. Dr. Hasan DĐNÇER
HAZ ĐRAN 2006

2
ANAHTAR KEL ĐMELER
Smart Sensörler, ZigBee, WPAN, MSP430F169, CC1020, Kan Basınç Ölçümü,
Basınç Dönüştürücü, Tıp Elektroniği

3
KEY WORDS
Smart Sensors, ZigBee, WPAN, MSP430F169, CC1020, Blood Pressure
Measurement, Pressure Transducer, Medical Instrumentation

4
ÖZET
Bu tezde, tıp elektroniğinde yaygın kullanım alanı olan osilometrik kan basıncı
ölçüm sistemi incelenmiş, smart sensörler üzerine yapılan araştırmalar da göz önüne
alınarak; düşük tansiyon, yüksek tansiyon, ortalama tansiyon ve nabız değerleri
ölçülmüş ve sisteme eklenen kablosuz modül sayesinde bilgisayarda gözlemlenmesi
ve verilerin depolanması sağlanmıştır.

5
ABSTRACT
In this thesis, blood pressure is measured by the help of the osilometric measurement
system. Smart sensors’ last applications are keeped in mind in this pratical
application. Sistolitic pressure, diastolic pressure, average pressure and blood pulse
are send via wireless module.

6
TEŞEKKÜR
Bu çalışmaya bilgi ve tecrübelerini katarak bize yardımcı olan ve bu konuda çalışma
olanağı veren Prof. Dr. Hasan DĐNÇER’e ve Yrd. Doç. Dr. Mehmet YAKUT’a, sınıf
arkadaşım Göker KUZUCU ve Serkan ERBORAL’a ve hayatımın her anında olduğu
gibi bu konuda da bana maddi ve manevi desteklerini esirgemeyen değerli aileme
teşekkürlerimi bir borç bilirim.
7
ĐÇĐNDEKĐLER
ANAHTAR KEL ĐMELER........................................................................................ 2
KEY WORDS............................................................................................................. 3
ÖZET........................................................................................................................... 4
ABSTRACT................................................................................................................ 5
TEŞEKKÜR ............................................................................................................... 6
ĐÇĐNDEKĐLER .......................................................................................................... 7
SĐMGELER D ĐZĐNĐ VE KISALTMALAR L ĐSTESĐ.......................................... 12
ŞEKĐLLER L ĐSTESĐ............................................................................................... 14
TABLOLAR L ĐSTESĐ............................................................................................. 17
1. BÖLÜM: G ĐRĐŞ ............................................................................................... 19
2. BÖLÜM: SENSÖRLER.................................................................................. 20
2.1. Akıllı Sensörler .......................................................................................... 20
2.2. Sensör Ağların Tanıtımı............................................................................. 21
2.3. Sensör Ağların Uygulama Alanları............................................................ 24
2.3.1. Çevresel Uygulamalar........................................................................ 24
2.3.2. Sağlık Uygulamaları........................................................................... 24
2.3.3. Ticari Uygulamalar ............................................................................ 25
2.3.4. Askeri Uygulamalar ........................................................................... 25
2.4. Kablosuz Teknolojiler Đçin Đletişim Altyapısı............................................ 25
2.4.1. IEEE 802.11 ....................................................................................... 25
2.4.2. IEEE 802.15 ....................................................................................... 26
2.4.3. IEEE 802.16 ....................................................................................... 27
2.4.4. IEEE 802.20 ....................................................................................... 28
2.4.5. IEEE 802.21 ....................................................................................... 28
2.4.6. IEEE 802.22 ....................................................................................... 29
2.4.7. Bluetooth............................................................................................ 29
2.4.8. Infrared Data Association (IrDA) ...................................................... 29
2.4.9. Ultra Wideband (UWB) ..................................................................... 30
2.4.10. IEEE P1451.5..................................................................................... 30
3. BÖLÜM: TANS ĐYONUN TANIMI VE ÇE ŞĐTLER Đ.................................. 31
3.1. Tansiyon..................................................................................................... 31
8
3.2. Normal Tansiyon Değerleri Nelerdir? ....................................................... 38
3.3. Düşük Tansiyon Nedir?.............................................................................. 40
3.4. Normal Tansiyon Değerlerinin Ölçümü..................................................... 40
3.5. Tansiyon nasıl ölçülür? .............................................................................. 41
3.6. Basınç Oranlarına Göre Tansiyon Değerleri.............................................. 42
3.7. Stetoskop Đle Kan Basıncının Ölçüm Koşulları ......................................... 43
3.8. Tansiyona Etkileri Tartışılan Diğer Etmenler ............................................ 43
3.9. Büyük Tansiyon, Küçük Tansiyon ve Ortalama Tansiyon Nedir? ............ 44
3.10. Neden Tansiyonum Đnip Çıkıyor?.......................................................... 45
3.11. Ölçüm Yöntemleri:................................................................................. 46
3.11.1. Direkt Yöntemler ............................................................................... 46
3.11.2. Đndirekt Yöntemler ................................................................................. 47
3.11.2.1. Dokunma ("Palpatory") Yöntemi................................................... 48
3.11.2.2. Osilometrik Yöntem....................................................................... 49
3.11.2.3. Dinleme (Oskültasyon - "Auscultatoıy") Yöntemi ........................ 50
3.11.2.4. Flush Yöntemi................................................................................ 51
3.11.2.5. Ultrasonik Yöntem......................................................................... 51
3.11.2.6. Otomatik Ölçüm Yöntemi.............................................................. 51
3.11.3. Ortalama Kan Basıncını Ölçen Otomatik Bir Sistem ........................ 53
4. BÖLÜM CC1020 NORROW BANDLI UYGULAMLAR ĐÇĐN DÜŞÜK
GÜÇLÜ RF TRANCEIVER...................................................................................56
4.1. Uygulamaları.............................................................................................. 56
4.2. Ürün Özellikleri ......................................................................................... 56
4.3. Teknik Özellikler ....................................................................................... 57
4.4. CC1020 Đçin, Çalışma Değer Aralıkları..................................................... 57
4.5. Çalışma Koşulları....................................................................................... 58
4.6. Elektriksel Değerler ................................................................................... 58
4.7. RF Verici Katı Parametreleri .....................................................................58
4.9. Frekans Sentezleme Parametreleri ............................................................. 60
4.10. Sayısal GĐRĐŞ/ÇIKIŞ ............................................................................. 61
4.11. Pin Dağılımı ........................................................................................... 62
4.12. Devre Yapısı........................................................................................... 64
4.13. Uygulama Devresi.................................................................................. 65
9
4.14. Giriş / Çıkış Karşılaştırması ................................................................... 65
4.15. Konfigürasyon........................................................................................ 67
4.16. Konfigürasyon Yazılımı......................................................................... 67
4.17. Mikroişlemci Ara Yüzü.......................................................................... 69
4.18. Đşaret Ara Yüzü ...................................................................................... 70
4.19. PLL Kitleme Đşareti................................................................................ 71
4.20. 4 Telli Seri Konfigürasyon Ara Yüzü .................................................... 71
4.21. Đşaret Ara Yüzü ...................................................................................... 74
4.22. Senkronlu NRZ Ara Yüzü...................................................................... 74
4.23. Senkronlu Manchester Kodlama Modu ................................................. 75
4.24. Asenkron UART Modu.......................................................................... 76
4.25. CC1020’nin PCB Bacakları ................................................................... 77
5. BÖLÜM: MSP430F169 TEXAS INSTRUMENTS....................................... 79
5.1. Tanımı ........................................................................................................ 79
5.2. Özellikleri................................................................................................... 81
5.3. CPU............................................................................................................ 83
5.4. Komut Seti ................................................................................................. 84
5.5. Çalışma Modları......................................................................................... 84
5.6. Kesme Vektör Adresleme .......................................................................... 85
5.7. Düşük Güç Tüketim Yeteneği.................................................................... 86
5.8. Kesme Enable 1 ve 2 (kesme izin saklayıcıları)........................................ 87
5.9. Modül Saklayıcı 1 ve 2 .............................................................................. 88
5.10. Mikrodenetleyicinin Modülleri .............................................................. 89
5.10.1. Bootstrap Loader (BSL) Yükleyici .................................................... 89
5.10.2. Flash Bellek........................................................................................ 90
5.10.3. DMA Kontroller................................................................................. 90
5.10.4. Osilatör ve Sistem Saati ..................................................................... 91
5.10.5. Gerilim Denetleyici ............................................................................ 92
5.10.6. Watchdog Timer................................................................................. 92
5.10.7. USART0............................................................................................. 92
5.10.8. Timer-A3............................................................................................ 93
5.10.9. Timer B7 ............................................................................................ 93
5.10.10. Karşılaştırıcı (Comparator) - A ...................................................... 93
10
5.11. CPU Tanımı ........................................................................................... 93
5.11.1. Program Counter(PC/RO)(Program Sayıcı) ...................................... 94
5.11.2. Yığın Đşaretçisi(SP/RI) ....................................................................... 95
5.11.3. Durum Saklayıcısı(SR) ...................................................................... 96
5.11.4. Sabit Üreteç Saklayıcısı CG1 and CG2 ............................................. 96
5.11.5. Genel Amaçlı Saklayıcılar R4-R15.................................................... 97
5.12. Adresleme Modları................................................................................. 97
5.12.1. Saklayıcı Mod .................................................................................... 98
5.12.2. Adreslenmiş Mod............................................................................... 99
5.12.3. Sembolik Mod..................................................................................100
5.12.4. Mutlak Mod (Absolute Mod)........................................................... 101
5.12.5. Dolaylı Saklayıcı Mod (Indirect Register Mod) .............................. 102
5.12.6. Dolaylı Otomatik Artırım Modu (Indirect Autoincrement Mod) .... 103
5.12.7. Doğrudan Modu ............................................................................... 104
5.13. Komut Seti ........................................................................................... 105
5.13.1. Đki Operantlık Komutlar................................................................... 106
5.13.2. Tek Operantlık Komutlar ................................................................. 107
5.13.3. Atlamalar (Jumps)............................................................................ 107
5.14. C VE ASSEMBLY ile MSP430 .......................................................... 110
5.14.1. C’den Parametre Geçişi.................................................................... 111
5.14.2. Kesme Fonksiyonları ....................................................................... 111
5.14.3. C’den Çağrılmış Assembly Rutinler ................................................ 112
5.15. Yerel Hafıza Dağılımı .......................................................................... 113
5.16. Uygulama Devresi................................................................................113
5.17. Osilatör ve Sistem Darbesi................................................................... 115
5.18. Brown-Out ........................................................................................... 116
5.19. Karşılaştırma Latchleri (TBCLX) ........................................................ 119
5.20. A/D Çevirici ......................................................................................... 120
5.21. DAC12 ................................................................................................. 122
5.22. Çevrimsel Dosya Haritası .................................................................... 124
5.23. Çevresel Dosya Haritası....................................................................... 125
5.24. Terminal Fonksiyonları........................................................................ 126
5.25. Kesme Vektör Adresleri....................................................................... 128
11
5.26. IAR Embedded Workbench for MSP430 v3 Derleyicisinin Kullanılması
129
6. BÖLÜM: 200 kPa On-CHIP SICAKLIK HASSAS ĐYETL Đ ve KALĐBRELĐ
BASINÇ SENSÖRÜ............................................................................................... 141
6.1. Tanım ....................................................................................................... 141
6.2. Özellikleri................................................................................................. 141
6.3. Tipik Uygulamaları .................................................................................. 141
6.4. Voltaj Çıkışı ve Uygulanmış Diferansiyel Sensör Basıncı ...................... 142
6.5. Basınç P1/Vakum P2 Tarafı Bilgileri ...................................................... 143
7. BÖLÜM: S ĐSTEMĐN ÇALI ŞMA YAPISI .................................................. 144
7.1. Giriş.......................................................................................................... 144
7.2. Manşetin Ölçüm Alınacak Basınca Getirilmesi....................................... 145
7.3. Kan Basıncının Ölçümü ........................................................................... 147
7.4. Yüksek Tansiyonun Ölçümü.................................................................... 147
7.5. Nabız Ölçümü .......................................................................................... 150
7.6. Düşük Tansiyonun Ölçülmesi .................................................................. 152
7.7. Ölçüm Almadan Önce.............................................................................. 152
7.8. Ölçüm Alırken.......................................................................................... 153
7.9. Tansiyon Ölçümünde Kullanılan Analog Devreler.................................. 153
8. BÖLÜM: MODÜLLER ĐN PROGRAM KODLARI ..................................156
8.1. Fonksiyonlar Kütüphanesi ....................................................................... 156
8.2. ADC Programı ......................................................................................... 158
8.3. DCO Programı ......................................................................................... 160
8.4. Donanımsal Çarpıcı Programı.................................................................. 161
8.5. UART Programı....................................................................................... 162
9. SONUÇLAR ve ÖNERĐLER ........................................................................ 165
KAYNAKLAR ....................................................................................................... 166
ÖZGEÇM ĐŞ.............................................................Hata! Yer işareti tanımlanmamış.
12
SĐMGELER D ĐZĐNĐ VE KISALTMALAR L ĐSTESĐ
ACP Adjacent Channel Power
ACR Adjacent Channel Rejection
ADC Analog-to-Digital Converter
AFC Automatic Frequency Control
AGC Automatic Gain Control
AMR Automatic Meter Reading
ASK Amplitude Shift Keying
BER Bit Error Rate
BOM Bill Of Materials
bps bits per second
BT Bandwidth-Time product (for GFSK)
ChBW Receiver Channel Filter Bandwidth
CW Continuous Wave
DAC Digital-to-Analog Converter
DNM Do Not Mount
ESR Equivalent Series Resistance
FHSS Frequency Hopping Spread Spectrum
FM Frequency Modulation
FS Frequency Synthesizer
FSK Frequency Shift Keying
GFSK Gaussian Frequency Shift Keying
IC Integrated Circuit
IF Intermediate Frequency
IP3 Third Order Intercept Point
ISM Industrial Scientific Medical
kbps kilo bits per second
LNA Low Noise Amplifier
LO Local Oscillator (in receive mode)
MCU Micro Controller Unit
NRZ Non Return to Zero
OOK On-Off Keying
13
PA Power Amplifier
PD Phase Detector / Power Down
PER Packet Error Rate
PCB Printed Circuit Board
PN9 Pseudo-random Bit Sequence (9-bit)
PLL Phase Locked Loop
PSEL Program Select
RF Radio Frequency
RSSI Received Signal Strength Indicator
RX Receive (mode)
SBW Signal Bandwidth
SPI Serial Peripheral Interface
SRD Short Range Device
TBD To Be Decided/Defined
T/R Transmit/Receive (switch)
TX Transmit (mode)
UHF Ultra High Frequency
VCO Voltage Controlled Oscillator
VGA Variable Gain Amplifier
XOSC Crystal oscillator
XTAL Crystal
14
ŞEKĐLLER L ĐSTESĐ
Şekil 2.1. Sensör Birimleri ......................................................................................... 22
Şekil 2.2. Çeşitli Boyuttaki Sensöler.......................................................................... 23
Şekil 3.1. Atardamarlarda akan kanın damar duvarlarına uyguladığı kuvvet............ 31
Şekil 3.2. Yüksek ve Düşük Tansiyon Değerleri ....................................................... 32
Şekil 3.3. Kalbin EKG Đşareti .................................................................................... 33
Şekil 3.4. Dolaşım Sistemindeki Basınç Profili ......................................................... 34
Şekil 3.5. Kanın Damarlardaki Basınç Oranları......................................................... 36
Şekil 3.6. Sistolik Basınç ........................................................................................... 38
Şekil 3.7. Diastolik Basınç......................................................................................... 38
Şekil 3.8. Basınç Oranlarına Göre Tansiyon Değerleri.............................................. 39
Şekil 3.9. Arter Basıncının Değişimi ve Ortalama Basıncı Veren Bağıntılar............ 45
Şekil 3.10. Sıstolik ve Diastolik Basman Erkeklerde Yaşa Göre Değişimi............... 46
Şekil 3.11. Sıstolik Ve Diastolik Basman Kadınlarda Yaşa Göre Değişimi.............. 47
Şekil 3.12. Dokunma Yöntemi................................................................................... 48
Şekil 3.13. Kaf Basıncındaki Osilasyonlar I .............................................................. 49
Şekil 3.14. Kaf basıncındaki Osilasyonlar II ............................................................. 49
Şekil 3.15. Osilometrik Yöntem Dinleme Yöntemi (Gedtjes, k. -21)........................ 50
Şekil 3.16. Dinleme Yönteminde Algılanan Sesin Değişimi..................................... 50
Şekil 3.17. Ultrasonik Basınç Ölçüm Sistemi............................................................52
Şekil 3.18. Ultrasonik Basınç Ölçüm Sisteminde Kullanılan Pnömatik Sistem........ 53
Şekil 3.19. a) Arter Basıncı Değişimi ve b) Kaf Basıncındaki Osilasyon ................. 54
Şekil 3.20 Osilometrik Ölçüm Yöntemine Göre Basınç Değerleri............................ 54
Şekil 3.21. Ortalama Kan Basıncının Otomatik Olarak Ölçen Mikroişlemcili Bir
Sistem................................................................................................................. 55
Şekil 4.1. CC1020 Pin Numaraları(Üstten Görünüş)................................................. 62
Şekil 4.2. CC1020’nin Blok Şeması .......................................................................... 64
Şekil 4.3. Uygulama Devresi ..................................................................................... 66
Şekil 4.4. SmartRF® Studio Kullanıcı Ara Yüzü ...................................................... 68
Şekil 4.5. SmartRF® Studio Kullanıcı Ara yüzü....................................................... 69
Şekil 4.6. Mikroişlemci Ara Yüzü ............................................................................. 70
Şekil 4.7. Yazma Đşlemi Esnasında Saklayıcıların Konfigürasyonu.......................... 72
15
Şekil 4.8. Okuma Đşlemi Esnasında Registerların Konfigürasyonu........................... 72
Şekil 4.9. Senkronlu NRZ Modu(SEP_DI_DO = 0).................................................. 74
Şekil 4.10. Senkronlu NRZ Modu (SEP_DI_DO = 0)............................................... 75
Şekil 4.11. Manchester Kodlama ............................................................................... 76
Şekil 4.12. PCB Bacakları.......................................................................................... 77
Şekil 4.13. CC1020 Uygulama Devresinin Üst Kısmı............................................... 77
Şekil 4.14. CC1020 Uygulama Devresinin Malzeme Yerleşimi ............................... 78
Şekil 4.15. CC1020 Uygulama Devresinin Alt Kısmı ............................................... 78
Şekil 5.1. MSP430F169 Microişlemcisi Geliştirme Board’u .................................... 80
Şekil 5.2. MSP430F169 ‘un Bacak Tasarımı............................................................ 82
Şekil 5.3. MSP430F169 ‘un Fonksiyonel Blok Diyagramları ................................... 83
Şekil 5.4. CPU Tanıtımı............................................................................................. 83
Şekil 5.5. Flash Bellek Yapısı .................................................................................... 90
Şekil 5.7. Yığın Kullanımı ........................................................................................ 95
Şekil 5.9.Saklayıcı Moduna Örnek ............................................................................ 98
Şekil 5.10. Adreslenmiş Moda Örnek ...................................................................... 100
Şekil 5.11. Sembolik Moda Örnek........................................................................... 101
Şekil 5.12. Mutlak Moda Örnek............................................................................... 102
Şekil 5.13. Dolaylı Saklayıcı Modunun Yapısı........................................................ 103
Şekil 5.14. Dolaylı Otomatik Artım Moduna Örnek................................................ 104
Şekil 5.15. Đşlemci Operasyonu ............................................................................... 104
Şekil 5.16. Doğrudan Modun Yapısı........................................................................ 105
Şekil 5.17. Entegre Analog Sistemi ......................................................................... 113
Şekil 5.18. MSP430F169 ile Entegre Sistem........................................................... 114
Şekil 5.19. Entegre Olmuş Sistem Yazılım Akışı .................................................... 115
Şekil 5.20. Osilatör Devresi ..................................................................................... 116
Şekil 5.21 Brown-Out Devresi................................................................................. 117
Şekil 5.22. SVS Düzeyi............................................................................................ 118
Şekil 5.23. Karşılaştırma Mandalları ....................................................................... 120
Şekil 5.24. ADC....................................................................................................... 122
Şekil 5.25. DAC....................................................................................................... 123
Şekil 5.26. Adım 1 ................................................................................................... 129
Şekil 5.27. Adım 2 ................................................................................................... 130
16
Şekil 5.28. Adım 3 ................................................................................................... 131
Şekil 5.29. Adım 4 ................................................................................................... 132
Şekil 5.30. Adım 5 ................................................................................................... 133
Şekil 5.31. Adım 6 ................................................................................................... 134
Şekil 5.32. Adım 7 ................................................................................................... 135
Şekil 5.33. Adım 8 ................................................................................................... 136
Şekil 5.34. Adım 9 ................................................................................................... 137
Şekil 5.35. Adım 10 ................................................................................................. 138
Şekil 5.36. Adım 11 ................................................................................................. 139
Şekil 5.37. Adım 12 ................................................................................................. 140
Şekil 6.1. 200 kPa On-Chip Sıcaklık Hassasiyetli ve Kalibreli Basınç Sensörü ..... 141
Şekil 6.2. Basınç Sensörünün Yapısı ....................................................................... 142
Şekil 6.3. Çıkış Karakteristiği .................................................................................. 143
Şekil 7.1. Sistemin Akış Diyagramı......................................................................... 144
Şekil 7.2. Sistemin Akış Diyagramı......................................................................... 146
Şekil 7.3. Yüksek Tansiyon Ölçüm Algoritması ..................................................... 149
Şekil 7.4. Nabız Ölçüm Algoritması ........................................................................ 151
Şekil 7.5. Ölçüm Yükselteci .................................................................................... 153
Şekil 7.6. Farklı Kazançlardaki Bant Geçiren Filtreler............................................ 154
Şekil 7.7. AC Bağlaşma Devresi.............................................................................. 155
Şekil 7.8. Analog Devrelerin Baskı Devre Şeması .................................................. 155
17
TABLOLAR L ĐSTESĐ
Tablo 3.1. Kan Basıncı Ölçümünde Kullanılan Đndirekt Yöntemler ......................... 48
Tablo 4.1. Kesim Maksimum Oranlar........................................................................ 57
Tablo 4.2. Çalışma Koşulları ..................................................................................... 58
Tablo 4.3. RF Verici Katı Parametreleri .................................................................... 59
Tablo 4.4. RF Alıcı Katı Parametreleri ...................................................................... 60
Tablo 4.5. Frekans Sentezleme Parametreleri............................................................ 60
Tablo 4.6. Sayısal Giriş/Çıkış .................................................................................... 61
Tablo 4.7. CC1020 PIN Dağılımı .............................................................................. 63
Tablo 4.8. Harici Elemanlar ....................................................................................... 66
Tablo 4.9. Uygulama Devresi Đçin Kullanılacak Malzemelerin Değerleri ................ 67
Tablo 4.10. Seri Ara Yüz, Zamanlama Açıklamaları................................................. 73
Tablo 5.1. Kelime Komut Formatı............................................................................ 84
Tablo 5.2. Adres Modları ........................................................................................... 84
Tablo 5.3. STATUS (durum) Saklayıcısı................................................................... 86
Tablo 5.4. Kesme Çalışır Durumda 1 ........................................................................ 87
Tablo 5.5. Kesme Çalışır Durumda 2 ........................................................................ 87
Tablo 5.6. Kesme Bayrakları 1 ve 2........................................................................... 88
Tablo 5.7. Kesme Bayrak Saklayıcısı 1 ve 2 ............................................................. 88
Tablo 5.8. Modül Saklayıcı 1 ve 2 ............................................................................. 89
Tablo 5.9. MSP430F169 Hafıza Organizasyonu ....................................................... 89
Tablo 5.10. Bootsrap Lader........................................................................................ 89
Tablo 5.11. Program Sayıcı........................................................................................ 95
Tablo 5.12. Yığın Đşaretçisi........................................................................................ 95
Tablo 5.13. Durum Saklayıcısı .................................................................................. 96
Tablo 5.14. Kaynak ve Hedef Đşlemci Adres Modları ............................................... 98
Tablo 5.15. Yazıcı Modun Tanıtımı........................................................................... 98
Tablo 5.16. Adreslenmiş Mod Tanımı ....................................................................... 99
Tablo 5.17. Sembolik Modun Tanımı...................................................................... 100
Tablo 5.18. Mutlak Moda Örnek.............................................................................. 101
Tablo 5.19. Dolaylı Saklayıcı Modun Tanıtımı ....................................................... 102
18
Tablo 5.20. Dolaylı Otomatik Artım Modunun Tanımı........................................... 103
Tablo 5.21. Doğrudan Modun Tanımı ..................................................................... 104
Tablo 5.22. Đki Operantlık Komutlar........................................................................ 106
Tablo 5.23. Đki Operantlık Komut Örneği................................................................ 106
Tablo 5.24. Tek Operant Komut Tanıtımı ............................................................... 107
Tablo 5.25. Tek Operantlık Komut Örneği .............................................................. 107
Tablo 5.26. Atlama Komutunun Formatı................................................................. 107
Tablo 5.27. Atlama Komutlarını Tanımlar ve Listeler............................................ 108
Tablo 5.28. Çevrimsel Dosya Haritası ..................................................................... 124
Tablo 5.29. Çevresel Dosya Haritası........................................................................ 125
Tablo 5.30. Terminal Fonksiyonları......................................................................... 127
Tablo 5.31. Kesme Vektör Adresleri ....................................................................... 128
Tablo 6.1. MPX2200A/D CASE 344-15 ................................................................. 142
Tablo 6.2. MPX2200A/D CASE 344-15 Đçin Maksimum Oranlar.......................... 143
Tablo 6.3. MPX2200A/D CASE 344-15 Đçin Çalışma Karakteristikleri................. 143

19
1. BÖLÜM: G ĐRĐŞ
Günümüzden kablosuz bilgi iletişiminin gelişmesi ile gerek endüstriyel alanlarda
olsun, gerek medikal uygulamalarda olsun sistemlerin tekrar gözden geçirilmesi
gerekmektedir. Sistemler kablosuz bilgi iletişimi ile geliştirilebilirlikleri artmakta ve
performansları daha da geliştirilmektedir. Yapılan uygulama ile hastalardan elde
edilen veriler, ana merkeze daha hızlı ve daha güvenilir bir şekilde aktarılmaktadır.
Sistem smart sensörlerin yapısında olan genişlenebilirlik ve geliştirilebilirlik
sayesinde daha da geniş ortamlara yayılabilmekte ve sistemlerden kaynaklanan
hatalar azaltılmaktadır.
2. BÖLÜM: SENSÖRLER
2.1. Akıllı Sensörler Sensörler hayatımızın bir çok alanında kullanılır. Örneğin buzdolaplarının
sıcaklığının ne kadar olduğunu yada bize nükleer reaktörlerdeki hangi tankın
sıcaklığının hangi değerlerde seyrettiğini bize bildirir. Sensörlerin daha bir çok
alanda etkinlikleri vardır. Hatta bazı sensörler birbirleri ile haberleşerek birbirlerini
kalibre edebilirler. Bu sistemler için IEEE’nin uyguladığı standartlar vardır
(ZigBee®, Ethernet, Foundation Fieldbus, Lonwork, Profibus, Interbus-S, USB,
CAN-Bus, Device-Net, WorldFIP, P-NET, HART, ASI, IEEE 802.15.4).
Sensörlerin en büyük sorunlarından biri kalibrasyondur. Kalibrasyonun bu
sistemlerdeki önemine işaret etmek için 2002 yılında Toronto’daki nükleer enerji
üreten reaktördeki bir hata örnek verilebilir. Bruce B santralinde, doğru olarak
kalibre edilmemiş nötron detektöründen kaynaklanan bir problemden dolayı, sistem
o kısımla ilgili olan bütün reaktörlerin işleyişine son vermiştir. Reaktörün sıcaklığını
kontrol eden sensör ortama uygun olarak doğru kalibre edilmediği için gerçek
sıcaklık bilgisini merkeze iletememiştir. Bunun sonucunda sistemde hata meydana
gelmiş ve reaktörün gerçek sıcaklık değeri beklenenden düşük ölçülmüştür. Neticede
reaktör çok ısınmış ve patlama tehlikesi ile karşı karşıya kalınmıştır. Sıcaklık
değerinin normal değerin üstüne çıktığı, onu kontrol eden diğer sensörden elde
edilmiştir.
Analog sensörlere sayısal elemanlar takılarak sistemler desteklenmiş ve plug-and-
play sistemler geliştirilmi ştir. Böylece sistemlerin standart bir ara yüzü oluşmuş ve
belli protokolleri de destekleyen sistemler geliştirilmi ştir. Böylece sistem içerisine
eklemeler ve çıkartmalar kolaylıkla yapılabilir hale gelmiştir. Yani sistemler
taşınabilir, güncellenebilir ve geliştirilebilir olmaktadır. Sensörlerin bir diğer
problemleri de istenilen bölgeye yerleştirilmeleri kablo ile olmaktaydı. Bu da
sistemleri kablo bağımlısı haline getirmekteydi. Ancak son yıllarda yarı iletken ve
yonga teknolojisinin de gelişmesiyle wireless modüllerin boyutu ve maliyeti
azalmıştır. Bu kablosuz elemanlar sensörlerin sayısal çıkışlarına bağlanarak istenilen
21
uzaklıkta veri transferi yapılabilmektedir. Böylece sistemlerin etkinlik alanı daha da
genişlemektedir. [1]
Sensörler, otomatik cihazlara görme, dokunma ve diğer duyular aracılığıyla
çevrelerindeki olayları araştırma, çözümleme ve bunun sonucu olarak da daha
akıllıca davranma yeteneğini sağlar. Görme Sensörleri (Vision Sensors) parça
tanımlama ve parça ölçümünde kullanılır. Sıcaklık, güç ve şekil ölçümü yapan
sensörler de vardır.
Sensörlerin üretimdeki rolü Uyarlanmalı (Adaptive) Kontrol Sistemleri için veri
toplamaktır. Robotlara yön bilgisi vermek ya da Kalite Güvencesi (Quality
Assurance) ve Muayene Sistemleri için ölçümler yapmak sensörlerin rolüne ilişkin
örneklerdir.
Sensör teknolojisi günümüzde çok yoğun bir araştırma alanıdır. Gelecekte önem
kazanması beklenen araştırma alanlarından bazıları derinlik algılama için Üç Boyutlu
Görme, sıcaklık ve temas algılama için Yapay Ten (Artificial Skin) ve çeşitli özel
amaçlı sensörlerdir.
2.2. Sensör Ağların Tanıtımı Günümüze kadar farklı tiplerde ve büyüklüklerdeki sensörler, tetikleyici rolüyle
elektronik sistemlerin bir parçası olarak kullanılmaktaydı. Mikro elektro-mekanik
sistem (MEMS) ve telsiz iletişimi alanlarındaki teknolojik gelişmeler sonucu
sensörler için farklı uygulama alanları doğdu; sensör ağları. Askeri imkan ve
kabiliyetlerin arttırılması ve muharebe alanında üstünlük sağlaması için halen
üzerinde çalışmaların sürdürüldüğü sensör ağlar, geniş uygulama alanı olması
sebebiyle sivil projelerde de kullanılmaktadır
Sensör ağlarda görev yapan bir sensörün algılayıcı, işlemci, alıcı/verici ve güç
birimleri olmak üzere dört ana elemanı vardır. Bunlara ilave olarak kullanım amacına
göre bir sensör, yer bulma sistemi, güç üretim birimi, konum değiştirici
bulundurabilir. Ana birimler başta olmak üzere tüm bu birimler bir kibrit kutusu
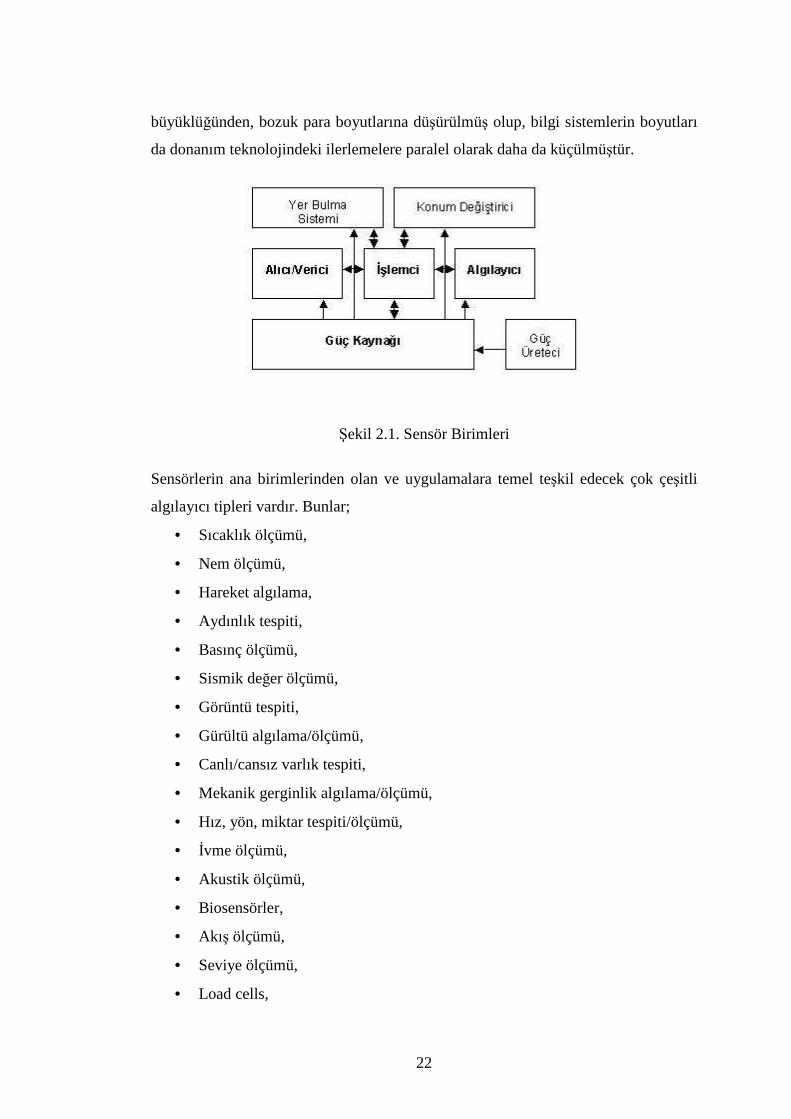
22
büyüklüğünden, bozuk para boyutlarına düşürülmüş olup, bilgi sistemlerin boyutları
da donanım teknolojindeki ilerlemelere paralel olarak daha da küçülmüştür.
Şekil 2.1. Sensör Birimleri
Sensörlerin ana birimlerinden olan ve uygulamalara temel teşkil edecek çok çeşitli
algılayıcı tipleri vardır. Bunlar;
• Sıcaklık ölçümü,
• Nem ölçümü,
• Hareket algılama,
• Aydınlık tespiti,
• Basınç ölçümü,
• Sismik değer ölçümü,
• Görüntü tespiti,
• Gürültü algılama/ölçümü,
• Canlı/cansız varlık tespiti,
• Mekanik gerginlik algılama/ölçümü,
• Hız, yön, miktar tespiti/ölçümü,
• Đvme ölçümü,
• Akustik ölçümü,
• Biosensörler,
• Akış ölçümü,
• Seviye ölçümü,
• Load cells,
23
• Oksijen ölçümü,
• pH ölçümü,
• Rezonans ölçümü,
• Tork ölçümü,
• Ultrasonic ölçüm,
• Vakum, esneklik, eğim, yakınlık, eğim gibi değerleri ölçen sensörler vardır.
Şekil 2.2. Çeşitli Boyuttaki Sensöler
Sensör ağlar, uygulamaya bağlı olarak uygulama sahasında konuşlandırılmasına (elle
konumlarına yerleştirilmesi, uçaktan atılması gibi) müteakiben, sensörlerin birbiri ile
iletişim kurması ile oluşmaya başlar. Donanım ve iletişim gücü itibariyle
güçlendirilmiş sensörler, sink etrafında dizayn aşamasında belirlenen protokoller
çerçevesinde tamamen kendi kendilerine kısa sürede organize olurlar. Algılayıcıları
vasıtasıyla tespit ettikleri veriyi sink’e birbirleri üzerinden ulaştırırlar. Sink kendisine
ulaşan veriyi kullanıcıya erişim noktalarından (uydu, sabit/hareketli aktarıcı) ya da
direk olarak ulaştırır. Verinin iletimi sırasında internet, intranet gibi ağ erişimleri de
kullanılabilir.
Sensör ağları geleneksel telsiz ağlardan ayıran özellikler şunlardır;
• Sensör ağlarındaki sensör sayısı geleneksel telsiz ağlardaki bilgisayar
sayısından çok daha fazla olabilmektedir,
• Sensör uygulama sahasında sensörlerin yoğunluğu fazladır,
• Gerek donanımlarının minyatüre edilmiş olduğundan gerekse de atıldıkları
saha özelliğinden bazılarının çalışmama/çalışamama ihtimalleri vardır,
• Donanım özellikleri kısıtlıdır (sınırlı batarya, işlemci, bellek),
24
• Adrese dayanan statik bir topolojileri yoktur,
• Her birinin başında kullanıcısı yoktur, uygulama sahasına bırakıldıktan sonra
kendi kendilerine organize olmak zorundadırlar.
Sensör ağların dizaynını etkileyen unsurlar şunlardır: Hata toleransı,
ölçeklenebilirlik, maliyet, uygulama sahası, ağ topolojisi, donanım kısıtlamaları,
iletişim ortamı kuralları, ve güç tüketimi. Bunlardan araştırmalara konu olan en
önemli unsur güç tüketimidir. Depolanabilen güç miktarı sensörün hayatta kalabilme
süresini, dolayısıyla ağ ömrünü belirlediğinden, tüm ağ katmanlarında efektif güç
tüketimini temel alan çalışmalar halen sürmektedir.
2.3. Sensör Ağların Uygulama Alanları Sensör ağların uygulama alanları, algılayıcı tiplerinin genişliği oranında
çeşitlendirilebilmekle beraber, uygulamalar aşağıdaki gibi başlıklar altında
toplanabilir:
2.3.1. Çevresel Uygulamalar Orman yangını, sel, deprem, gibi doğal afetlerin ölçümlendirilmiş olarak hızlı bir
şekilde ihbar edilmesinde,
Hava kirliliği tespiti ve ayrıntılı rapor alınmasında,
Doğal yaşamın gözlenmesinde.
2.3.2. Sağlık Uygulamaları
• Đnsanların fizyolojik verilerinin uzaktan izlenmesi,
• Hastanede bulunan doktorların yerinin ve hastaların durumunun (kalp atışı,
kan basıncı vb.) izlenmesi,
• Hastanedeki ilaç dağıtımının yönetimi.
25
2.3.3. Ticari Uygulamalar
• Küçük çocukların konumlarının aileleri tarafından takip edilmesi,
• Güvenlik ihtiyaçları,
• Envanter yönetim yardımcı aracı,
• Araçların izlenmesi ve tespit edilmesi.
2.3.4. Askeri Uygulamalar
• Dost kuvvetlerin teçhizat ve cephanesinin izlenmesi,
• Savaş alanının gözlenmesi,
• Arazi hakkında keşifte bulunma,
• Hedefin konumu, sürati gibi hedef bilgilerinin tespiti,
• Düşmana verdirilen hasar miktarının tespit edilmesi,
• Nükleer, biyolojik ve kimyasal (NBC) saldırıları ihbarının alınması ya da
keşfi.
2.4. Kablosuz Teknolojiler Đçin Đletişim Altyapısı [2] Kablosuz teknolojilerin, sürekli/yaygın hesaplama ortamında en çok bilinenleri IEEE
802 teknolojileridir. Genel olarak IEEE, bünyesinde oluşturduğu özel çalışma
grupları aracılığıyla, varolan kablosuz ağ teknolojilerini standartlaştırmakta, yeni ve
gelişmiş kablosuz ortamlar için OSI katmanlarından fiziksel katman ve veri bağı
katmanı seviyesinde standartlar oluşturmaktadır. IEEE yanı sıra, kablosuz
teknolojilerde ilgili cihaz standartlarını ve cihazlar arası iletişim standartlarını
belirleyen kar amaçlı veya kar amaçsız çalışan, Blutooth SIG (Bluetooth Special
Interest Group), IrDA (Infrared Data Association), ve bu gibi çeşitli organizasyonlar
vardır. Aşağıda, var olan başlıca kablosuz standartlar incelenmiştir:
2.4.1. IEEE 802.11
802.11 standartları genel olarak, kablosuz cihaz arayüzleri ile bunların iletişim
kurduğu erişim noktaları arasında uzlaşmayı sağlayarak, kablosuz yerel alan ağları
içinde (WLAN) fiziksel seviyede ve ortam erişim kontrolü (MAC) seviyesinde
26
arayüz standartlarını tanımlar. Bunun yanı sıra 802.11, yetkilendirme, mahremiyet ve
veri bütünlüğünü muhafaza etme gibi güvenlik unsurlarını iletişim protokol
mimarisinde mantıksal olarak sunar. IEEE 802.11 teknolojileri, çalıştıkları frekans
aralıkları ve destekledikleri veri oranları açısından özelleşmiş ve çeşitlenmiştir. Bu
ailenin, son kullanıcılar tarafından isim olarak en çok bilineni 1999 yılında
onaylanan IEEE 802.11b standardıdır. U.S. Federal Communications Commission
(FCC) frekans kullanım kuralları gereğince, lisans istenmeden serbestçe
kullanılabilen Endüstriyel Bilimsel Medikal (Industrial Scientific Medical, ISM )
bant frekanslarında, 2.40 GHz – 2.4835 GHz frekans aralığında çalışan 802.11b, 11
Mbps hızlarında veri oranı destekleyebilmektedir. 802.11g standardı ile, yine ISM
frekanslarında, 54 Mbps veri hızlarına ulaşılmaktadır.
Ayrıca, 802.11a standardı, 54 Mbps düzeyinde veri hızlarını 5 GHz üzerinde
sunmaktadır. 802.11 alt grupları, özellikleri doğrultusunda, yine bu harflendirme
sistemiyle çeşitlenmiştir. Bunların son zamanlarda en çok anılanlarından biri de
IEEE 802.11i standardıdır. 802.11 spesifikasyonlarında ilk kullanılan güvenlik
mekanizması, WEP (Wired Equivalent Protocol), ortaya konulan zayıflığı sonucu,
Wi-Fi Alliance tarafından WPA (Wi-Fi Protected Access) ile değiştirilmi ştir ve IEEE
bunu güncel haliyle olduğu gibi kabul edip 802.11i olarak standartlaştırmıştır.
802.11, WLAN için tasarlanmış olması sonucu, bilhassa 802.11b arayüz kartları ile
dizüstü kullanıcılarının bir yerel ağ içinde çalışmaları sayesinde, en fazla sayıda son
kullanıcıya ulaşmış olan kablosuz iletişim altyapısıdır. Wi-Fi olarak da bilinen bu
teknolojinin kullanımı, sunduğu veri hızları dahilinde, genel olarak dizüstü bilgisayar
iletişim uygulamalarının yanı sıra, ofis yerel ağ uygulamaları ve ev yerel ağ oluşum
uygulamalarını kapsar.
2.4.2. IEEE 802.15 Kablosuz kişisel alan ağı (Wireless Personal Area Network, WPAN) altyapısı olarak
sunulan IEEE 802.15 standardı, her yönde 10 m kapsama alanı olarak ifade edilen
kişisel işletim ortamı (Personal Operating Space, POS) için, fiziksel katman ve veri
bağı katmanı seviyesinde, kablosuz ağ ara yüz standartlarını tanımlamaktadır.
27
Bluetooth V1.1 teknolojisi için de alt iki katman standardını tanımlayıp bazı
eklentiler sunan 802.15 teknolojisi, asıl uygulamalarını kablosuz medya (WiMedia)
olarak duyurmuştur. 802.15.3 standardı, bu doğrultuda, kablosuz kişisel alan ağları
içinde video veri transferini desteklemek üzere, 20 Mbps veri hızı üzerinde
multimedya iletişimi sunmaktadır.
Bir başka tür teknoloji imkanı açısından, ultra-düşük maliyetli ve ultra-düşük güç
tüketimli iletişim altyapısı olarak IEEE 802.15.4, uzun pil ömrüne imkan tanıyan
fakat dolayısıyla düşük veri hızları sunan bir standarttır. 10 Kbps ile 250 Kbps
arasında veri hızlarını destekleyen, ZigBee® olarak da isimlendirilen 802.15.4
teknolojisi, “piconet” ağlarının geleceği açısından önemli bir altyapıdır.
802.15, WPAN için tasarlanmış olup, bilhassa WiMedia olarak bilinen 802.15.3
arayüz kartları ile son kullanıcılara ulaşmıştır. Kullanımı, temel olarak, kablosuz
yerel ağ ve kablosuz kişisel alan ağları içinde multimedya iletişim uygulamalarını
kapsar. Ayrıca, düşük hızlı ama yüksek pil ömürlü sensör ağları ve “piconet” sistem
oluşumlarını kapsar.
2.4.3. IEEE 802.16 Kablosuz iletişim teknolojilerinde kablolu iletişim hızlarına çıkmak, kablosuz
ortamın hayatı kolaylaştırıcı özelliğinin önüne geçip gerçek amaca yönelik olarak, iş
süreçlerini hızlandırmaya imkan tanımıştır. Şu an için her ne kadar yerel alan ağları
ortamında değil de metropolitan alan ağları içinde bu imkan daha olanaklı olsa da,
gün geçtikçe her tür ortam için performans ve verimlilik arttırıcı araştırmalar, büyük
şirketler, üniversiteler ve araştırma geliştirme merkezleri aracılığıyla hızlanmaktadır.
IEEE 802.16, bu doğrultuda, kablosuz metropolitan alan ağları (WMAN) içinde,
sabit geniş bant kablosuz erişim sistemleri için noktadan-çok noktaya kablosuz
iletişim arayüz standartlarını tanımlar. IEEE 802.16 standardı, 2 GHz – 11 GHz ve
10 GHz – 66 GHz geniş bant frekans aralıklarında 120 Mbps veri hızlarına
ulaşılabilen uygulamaları kapsamaktadır.
28
WiMAX olarak da anılan 802.16 teknolojisi, sabit WMAN için tasarlanmış olup
sunduğu yüksek veri hızları sayesinde, geniş alana yayılmış ofis uygulamaları ve
dağınık yerleşimli ofis şubelerinin birbiri ile iletişimi için uygun bir altyapı
oluşturmaktadır.
2.4.4. IEEE 802.20 802.16 teknolojisinin sunduğu sabit geniş bant uygulamalarını mobil imkanlarla
sunmak amacıyla, IEEE, Mobil Geniş bant Kablosuz Erişim Çalışma Grubu (Mobile
Broadband Wireless Access Working Group, MBWA) adındaki grubu ile IEEE
802.20 standartlarını oluşturmaya çalışmaktadır. 3.5 GHz frekans altında çalışan bu
teknoloji üzerinde, IP veri iletimi desteği en iyileştirilmeye çalışılmaktadır.
2.4.5. IEEE 802.21
Kablosuz teknolojiler açısından, bu bölümlerde tanıtılan 802 standartları yanı sıra,
tezin ileriki kısımlarında sunulacak olan 802 dışındaki altyapılar da önemli rol
üstlenmektedir. Bu farklı teknolojiler, kendi içinde bağımsız olarak günümüz
teknolojik imkanları dahilinde çalışabilmektedir. Her iki farklı grup teknolojinin de
aynı ortamda çalışması sonucu olası sorunlar, çakışmalar yok edilmeye
çalışılmaktadır. Zaten sürekli/yaygın ortamın felsefesindeki görünmezlik için, farklı
kablosuz teknolojilerin altyapı olarak da birlikte kullanılabilmesi verimlidir.
IEEE, bu farklı teknolojilerin birlikte kullanılmasının ötesinde, temelde, aynı
oturumun teknolojik altyapı ortamının değiştiği durumlarda da sürdürülebilmesini
amaçlayan çalışma grubunu 2004 yılında kurmuştur. IEEE 802.21 Çalışma Grubu
(Media Independent Handover Interoperability Working Group), standartlaştırmaya
çalıştıkları araştırmaları sonucunda, bütünüyle görünmez bir ortamda, 802
standartlarının ve 802 dışındaki kablosuz standartların sunduğu iletişimin
durdurulmadan birbirine geçişini ve veri iletimi üzerine hizmet sürekliliğini
sağlamayı hedeflemektedir.
29
2.4.6. IEEE 802.22
IEEE 802.22, 802 çalışma gruplarından en yeni olanıdır. Grup, Kablosuz Bölgesel
Alan Ağları (Wireless Regional Area Networks) içinde noktadan-çok noktaya, sabit
kablosuz iletişim için gerekenleri araştırmaktadır. Çalışma grubunun planı, bu
doğrultuda, VHF/UHF TV bandındaki 54 MHz – 862 MHz frekans aralığı içinde
kullanılmayan kanallar üzerinde kablosuz iletişimi kapsamaktadır.
2.4.7. Bluetooth
Bluetooth, özel ilgi grubu olarak, Bluetooth Special Interest Group (SIG) tarafından
1998 yılında geliştirilmi ş olan açık bir spesifikasyondur. Çalıştığı frekans açısından,
802.11b ile birbirine alternatif olan bu teknoloji, 802.11b altyapısının aksine bir ağ
yapısı değildir. FCC’nin, 2002 yılında, bu iki alternatif teknolojinin frekans
yapılarında düzenlediği bir modifikasyon ile, bugün aynı cihazda aynı anda her iki
teknoloji de çalışabilmektedir. Temelde Bluetooth, ağ oluşturma niyetiyle değil de
kabloyu ortadan kaldırıp yerel alan ağları içinde kablonun yerini almak üzere
geliştirilmi ş bir teknolojidir. Güncel olan Bluetooth V2.0 standardı, maksimum 3
Mbps veri hızını desteklemektedir. Bluetooth teknolojisi, kişisel veri iletimi
uygulamaları amacıyla, başlıca, dizüstü bilgisayarlarda ve cep telefonlarında son
kullanıcıya ulaşmaktadır.
2.4.8. Infrared Data Association (IrDA)
IrDA, yönlü ışık demeti aracılığıyla ışığın dalga yapısı sayesinde kızılötesi (infrared)
frekanslarda gerçekleştirilen kablosuz iletişim teknolojisidir. 802 teknolojilerindeki
gibi radyo dalgalarını kullanmıyor olması, çalıştığı aynı frekanslardaki diğer radyo
dalgaları ile girişim yapmamasını sağlar. Đletişim esnasında, ışık dalgalarının yapısı
açısından, alıcı ve verici iki ucun birbirini direk görme zorunluluğu, düzenlemede
kısıt getirse de iletişimin güvenilirliğini destekleyici bir yapıdadır. 16 Mbps veri
hızlarındaki uygulamaları yaygın olarak kullanılmakta olan kızılötesi iletişim
30
teknolojisi, Infrared Data Association tarafından, 100 Mbps düzeyinde multimedya
uygulamalarını destekleyecek hale getirilmeye çalışılmaktadır.
2.4.9. Ultra Wideband (UWB)
Ultra Wideband (UWB) teknolojisi, altyapısındaki kapasite açısından, bir POS alan
içerisinde 800 MBps düzeylerine kadar veri hızı destekleyebilecek olanakta olup
temelde WiMedia uygulamaları için geliştirilmektedir. Kablolu iletişim hızlarını
kablosuz bir teknoloji olarak sunmayı hedefleyen ve uzun pil ömrünü desteklemeyi
amaçlayan UWB, ev ağ oluşumu, multimedya veri iletimi, radar teknolojileri,
kablosuz intercom gibi uygulamalar için çözüm sunmaktadır.
2.4.10. IEEE P1451.5
IEEE P1451.5, sinyalleşmede temel eleman olan sensörler için, dönüştürücü
(transducer) iletişim protokollerini ve sensörlerin kablosuz arayüz standartlarını
belirlemektedir.
3. BÖLÜM: TANS ĐYONUN TANIMI VE ÇE ŞĐTLER Đ
3.1. Tansiyon
Bedenimizde trilyonlarca hücre vardır. Bunlar mükemmel bir işbölümüyle çalışırlar.
Ama çalışabilmeleri için yakıta ve oksijene gereksinimleri vardır. Bu yakıtı, hücrede
oksijenle yakıp, çalışabilmeleri için gerekli enerjiyi sağlarlar. Sonra bu yanmadan
arta kalan artıkların ve açığa çıkan karbondioksitin hücreden uzaklaştırılması gerekir.
Đşte hücrenin gereksindiği yakıt ve oksijenin hücreye taşınması, oluşan artık ve
karbondioksitin hücreden uzaklaştırılması işini kan üstlenir.
Şekil 3.1. Atardamarlarda akan kanın damar duvarlarına uyguladığı kuvvet
Kanla hücre arasında az önce söylediğimiz alışverişin yapılabilmesi için, tüm
hücrelerin kanla temas etmesi gerekir. Bu yüzden, nasıl ki, dallar incele incele tüm
yapraklara kadar ulaşıyorlarsa, kan damarları da benzer biçimde damarlarla tüm
hücrelere kadar uzanırlar.
Ne var ki, kanın hücrelere kadar bir kere gitmesi yetmez. Sürekli yeni yakıtın, taze
oksijenin hücrelere taşınması, artıkların da sürekli uzaklaştırılması gerekir. Yani
bunun için kanın sürekli hareket etmesi gerekir. Bu işi, doğumdan ölüme kadar hiç
durup dinlenmeden kalp üstlenir. Bir kaç dakika bile dursa, bizim için tam bir felaket
olur.
Kalp, akciğerden gelen temizlenmiş, bol oksijenli kanı hücrelere kadar,
atardamarlarla pompalar. Kirlenmiş kan ise toplardamarlarla yeniden kalbe taşınır.
Yani kalp her atımda, önce kanı pompalar, sonra da kanın yeniden kalbe dolması için
istirahata geçer. Bu durmadan tekrarlanır. Öyle ki, kalp her dakikada 70-80 kere
pompalar bekler; pompalar bekler...
32
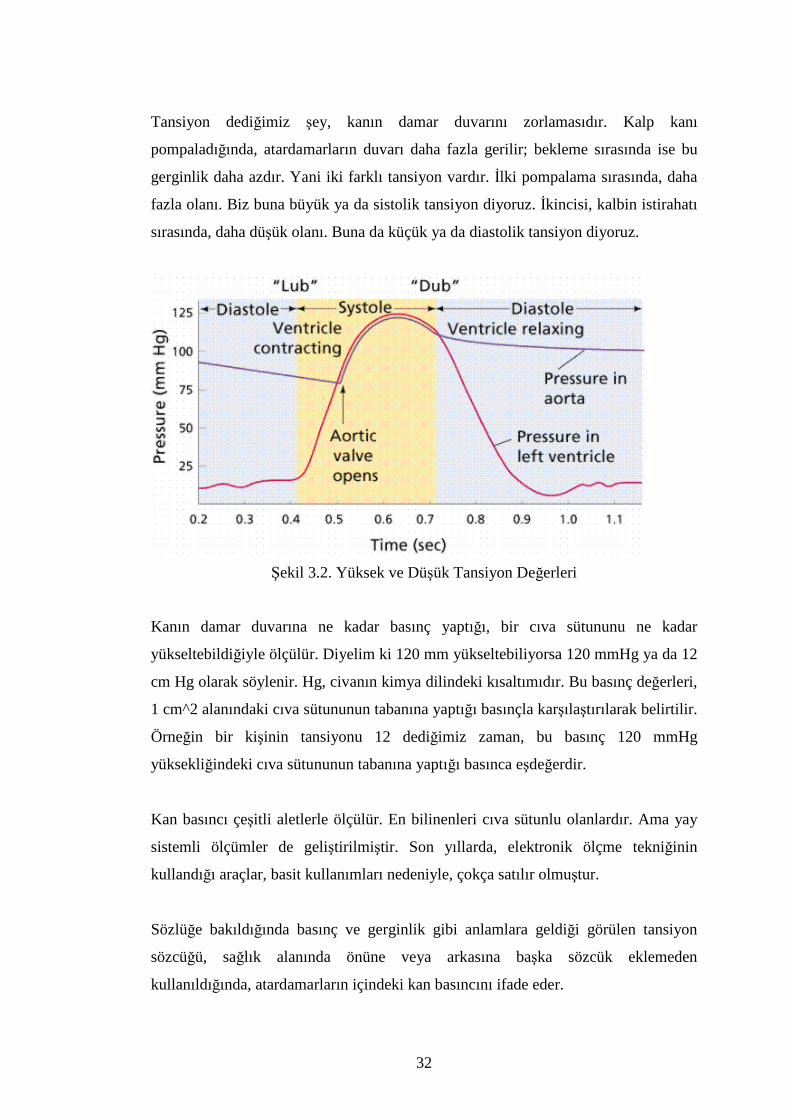
Tansiyon dediğimiz şey, kanın damar duvarını zorlamasıdır. Kalp kanı
pompaladığında, atardamarların duvarı daha fazla gerilir; bekleme sırasında ise bu
gerginlik daha azdır. Yani iki farklı tansiyon vardır. Đlki pompalama sırasında, daha
fazla olanı. Biz buna büyük ya da sistolik tansiyon diyoruz. Đkincisi, kalbin istirahatı
sırasında, daha düşük olanı. Buna da küçük ya da diastolik tansiyon diyoruz.
Şekil 3.2. Yüksek ve Düşük Tansiyon Değerleri
Kanın damar duvarına ne kadar basınç yaptığı, bir cıva sütununu ne kadar
yükseltebildiğiyle ölçülür. Diyelim ki 120 mm yükseltebiliyorsa 120 mmHg ya da 12
cm Hg olarak söylenir. Hg, civanın kimya dilindeki kısaltımıdır. Bu basınç değerleri,
1 cm^2 alanındaki cıva sütununun tabanına yaptığı basınçla karşılaştırılarak belirtilir.
Örneğin bir kişinin tansiyonu 12 dediğimiz zaman, bu basınç 120 mmHg
yüksekliğindeki cıva sütununun tabanına yaptığı basınca eşdeğerdir.
Kan basıncı çeşitli aletlerle ölçülür. En bilinenleri cıva sütunlu olanlardır. Ama yay
sistemli ölçümler de geliştirilmi ştir. Son yıllarda, elektronik ölçme tekniğinin
kullandığı araçlar, basit kullanımları nedeniyle, çokça satılır olmuştur.
Sözlüğe bakıldığında basınç ve gerginlik gibi anlamlara geldiği görülen tansiyon
sözcüğü, sağlık alanında önüne veya arkasına başka sözcük eklemeden
kullanıldığında, atardamarların içindeki kan basıncını ifade eder.
33
Damarın içinde kanın akabilmesi için belirli bir basıncının olması gerekir. Bu
basıncı, kalbin kasılmasıyla kanı damarların içine pompalaması ve atardamarların
elastikliğiyle bu basıncı dengelemesi sistemleri oluşturur.
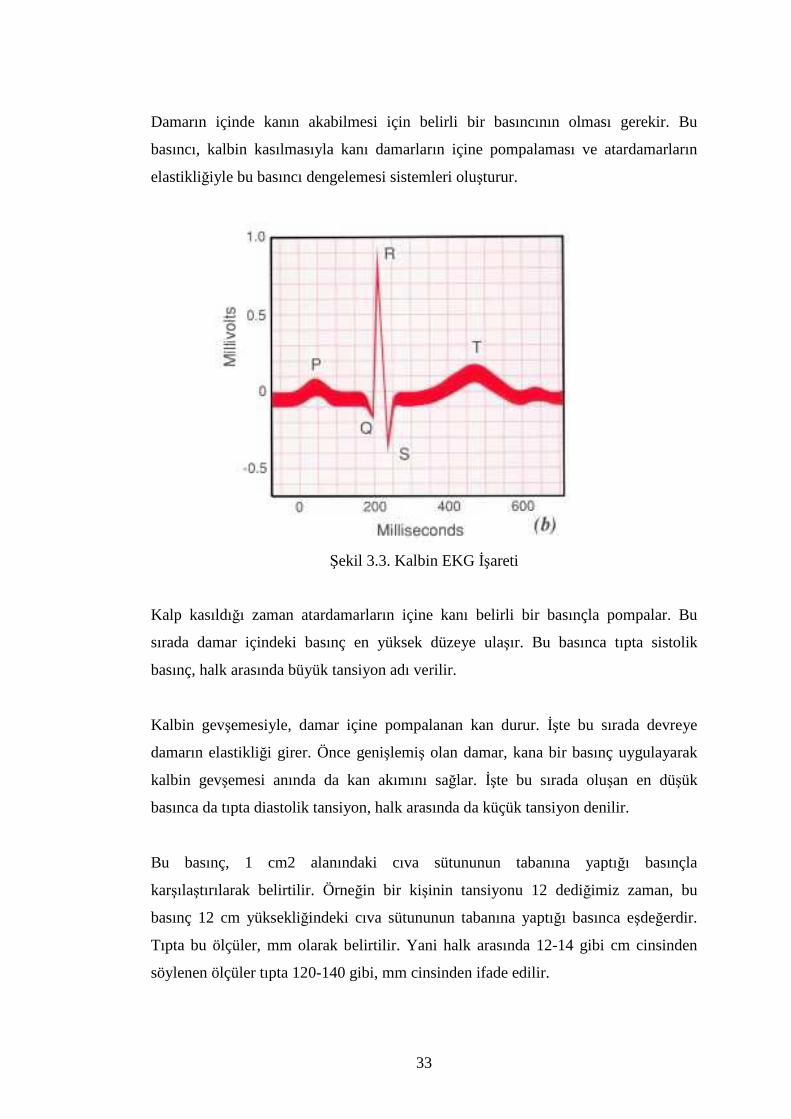
Şekil 3.3. Kalbin EKG Đşareti
Kalp kasıldığı zaman atardamarların içine kanı belirli bir basınçla pompalar. Bu
sırada damar içindeki basınç en yüksek düzeye ulaşır. Bu basınca tıpta sistolik
basınç, halk arasında büyük tansiyon adı verilir.
Kalbin gevşemesiyle, damar içine pompalanan kan durur. Đşte bu sırada devreye
damarın elastikliği girer. Önce genişlemiş olan damar, kana bir basınç uygulayarak
kalbin gevşemesi anında da kan akımını sağlar. Đşte bu sırada oluşan en düşük
basınca da tıpta diastolik tansiyon, halk arasında da küçük tansiyon denilir.
Bu basınç, 1 cm2 alanındaki cıva sütununun tabanına yaptığı basınçla
karşılaştırılarak belirtilir. Örneğin bir kişinin tansiyonu 12 dediğimiz zaman, bu
basınç 12 cm yüksekliğindeki cıva sütununun tabanına yaptığı basınca eşdeğerdir.
Tıpta bu ölçüler, mm olarak belirtilir. Yani halk arasında 12-14 gibi cm cinsinden
söylenen ölçüler tıpta 120-140 gibi, mm cinsinden ifade edilir.
34
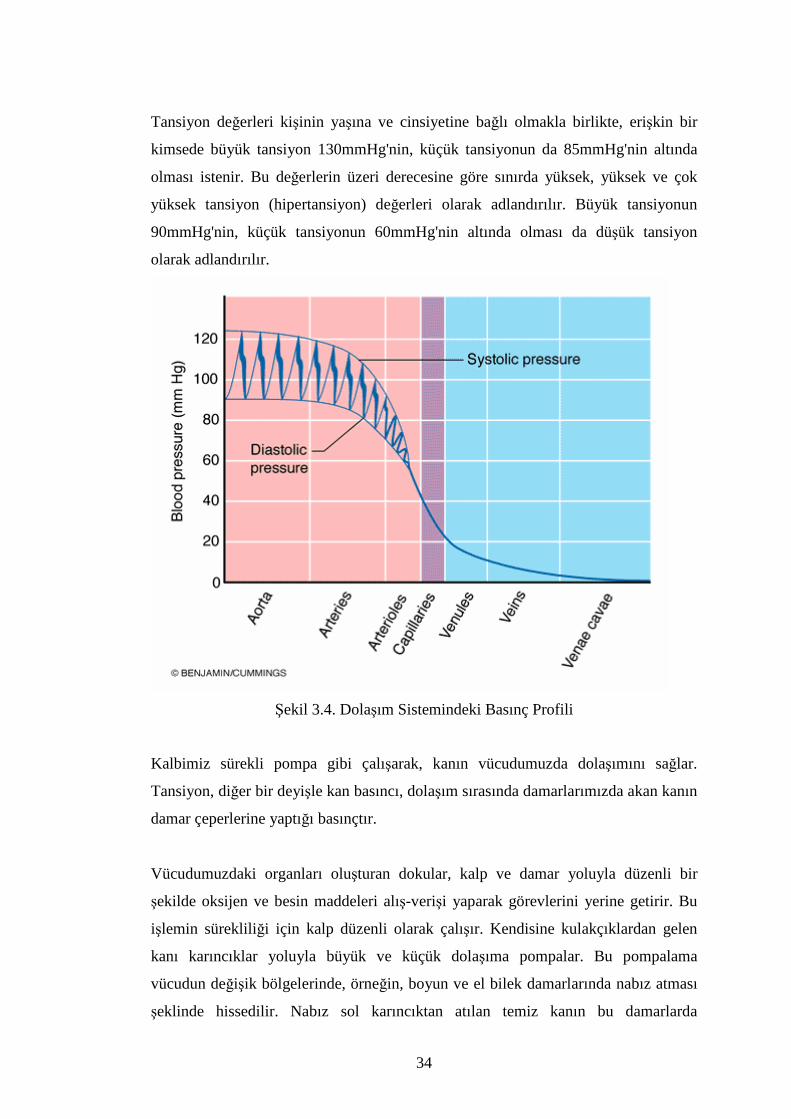
Tansiyon değerleri kişinin yaşına ve cinsiyetine bağlı olmakla birlikte, erişkin bir
kimsede büyük tansiyon 130mmHg'nin, küçük tansiyonun da 85mmHg'nin altında
olması istenir. Bu değerlerin üzeri derecesine göre sınırda yüksek, yüksek ve çok
yüksek tansiyon (hipertansiyon) değerleri olarak adlandırılır. Büyük tansiyonun
90mmHg'nin, küçük tansiyonun 60mmHg'nin altında olması da düşük tansiyon
olarak adlandırılır.
Şekil 3.4. Dolaşım Sistemindeki Basınç Profili
Kalbimiz sürekli pompa gibi çalışarak, kanın vücudumuzda dolaşımını sağlar.
Tansiyon, diğer bir deyişle kan basıncı, dolaşım sırasında damarlarımızda akan kanın
damar çeperlerine yaptığı basınçtır.
Vücudumuzdaki organları oluşturan dokular, kalp ve damar yoluyla düzenli bir
şekilde oksijen ve besin maddeleri alış-verişi yaparak görevlerini yerine getirir. Bu
işlemin sürekliliği için kalp düzenli olarak çalışır. Kendisine kulakçıklardan gelen
kanı karıncıklar yoluyla büyük ve küçük dolaşıma pompalar. Bu pompalama
vücudun değişik bölgelerinde, örneğin, boyun ve el bilek damarlarında nabız atması
şeklinde hissedilir. Nabız sol karıncıktan atılan temiz kanın bu damarlarda
35
oluşturduğu basınçtır. Büyük dolaşım sistemi ile dokuların gereksinimini karşılamak
için dağıtılan bu kan kullanıldıktan sonra tekrar temizlenmek üzere küçük dolaşım
yardımı ile akciğerlerden geçirilir.
Damarın içinde kanın akabilmesi için belirli bir basıncının olması gerekir. Bu
basıncı, kalbin kasılmasıyla kanı damarların içine pompalaması ve atardamarların
elastikliğiyle bu basıncı dengelemesi oluşturur.
Kalp kasıldığı zaman atardamarların içine kanı belirli bir basınçla pompalar. Bu
sırada damar içindeki basınç en yüksek düzeye ulaşır. Bu basınca tıpta sistolik
basınç, halk arasında büyük tansiyon adı verilir.
Kalbin gevşemesiyle, damar içine pompalanan kan durur. Đşte bu sırada devreye
damarın elastikliği girer. Önce genişlemiş olan damar, kana bir basınç uygulayarak
kalbin gevşemesi anında da kan akımını sağlar. Đşte bu sırada oluşan en düşük
basınca da tıpta diastolik tansiyon denir.
Bu basınç, 1 cm2 alanındaki cıva sütununun tabanına yaptığı basınçla karşılaştırılarak
belirtilir. Örneğin bir kişinin tansiyonu 12 dediğimiz zaman, bu basınç 12 cm
yüksekliğindeki cıva sütununun tabanına yaptığı basınca eşdeğerdir.
Tansiyon değerinin kişinin yaşına, cinsiyetine uyarlanan değerler arasında olmasına
normal tansiyon, üzerinde olmasına yüksek tansiyon (hipertansiyon), altında
olmasına da düşük tansiyon (hipotansiyon) denilmektedir. Tansiyon değerleri mmHg
(milimetre Cıva) olarak ölçülür. Ancak halk arasında cmHg daha yaygın olarak
kullanılır.
Tansiyonu, kanın damar duvarını zorlaması diye tarif etmiştik. Tansiyon ne kadar
yüksekse, damar duvarı o kadar çok zorlanır. Yani o kadar çok bozulur. Öyle bir kaç
ayda değil ama uzun yıllar bu zorlanma devam ederse, damar duvarı sertleşmeye
başlar. Damar duvarı sertleştikçe tansiyon daha da yükselir. Tansiyon daha da
yükselince, damar duvarı da daha çok bozulur. Bu böylece, giderek daha kötüye
36
doğru devam eder. Damar duvarının bu bozulup sertleşmesine, “damar sertliği” ya da
“aterosklerozis” denmektedir.
Damar duvarı sertleşip bozulunca, en başta hücrelerin iyi çalışıp işlerini
yapabilmeleri için kanın gerekli yakıt ve oksijeni; sonra açığa çıkan karbondioksit ve
artıkları damarlarda taşıdığını söylemiştik. Damarlar bozulunca bu taşıma işlemi
bozulur, hücreler de görevlerini yapamaz hale gelir, hatta ölürler. Tıpkı, su ve borular
olduğu halde, boruların içlerinin tıkanıp, suyun artık akamaması gibi...
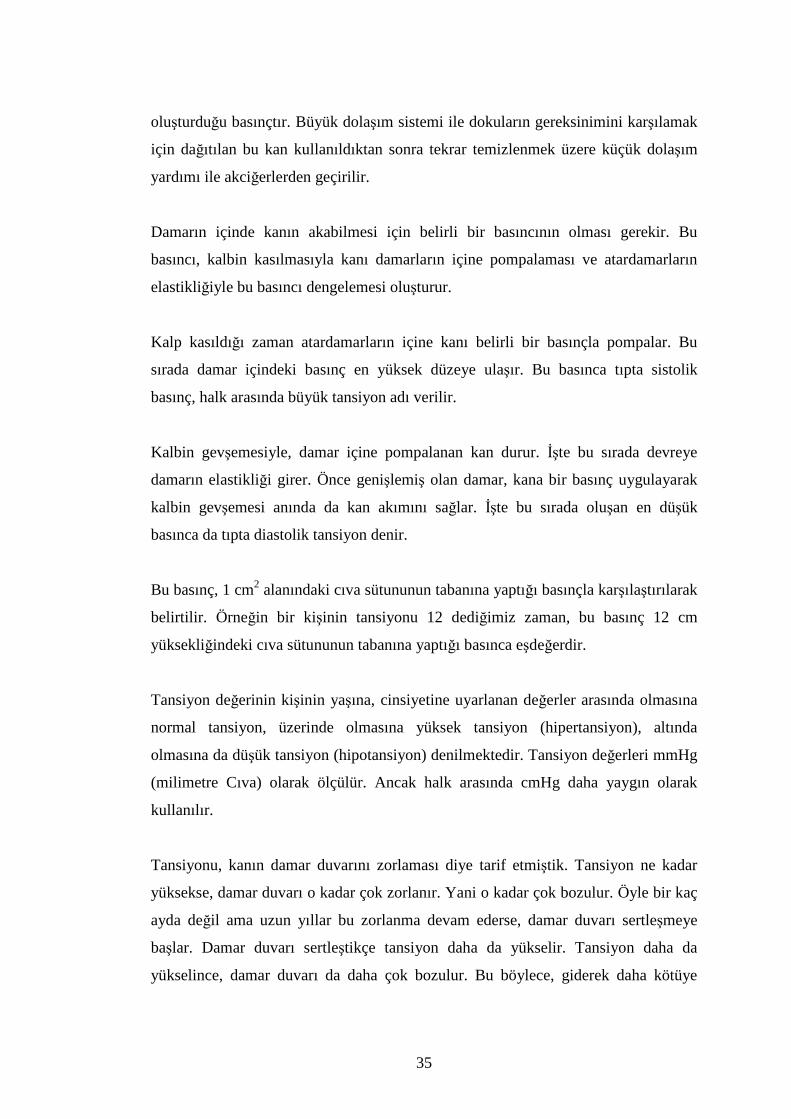
Vücudun her yerinde damar olduğu için vücudumuzun her yeri etkilenir. Ama bazı
yerler, daha da çok etkilenir.
Atış basıncı (Pulse Pressure) = Sistolik Basınç – Diastolik Basınç
Örneğin; Kan basıncı 120/80
Atış basıncı = 120 – 80 = 40 mmHg
Örneğin; Kan basıncı 140/80
Atış Basıncı = 140 – 80 = 60 mmHg (Güçlü kasılma, Fazla kan
hacmi)
Şekil 3.5. Kanın Damarlardaki Basınç Oranları
37
En başta kalbi besleyen damarlar (yani koroner damarlar) etkilenir. Kalbi besleyen
damarlar birden tıkanırsa, “kalp krizi” dediğimiz durum ortaya çıkar. Kalp krizi o
kadar ağır bir hastalıktır ki, kriz geçirenlerin dörtte biri hastaneye bile yetişemeden
ölür. Dörtte bir kadarı da hastanede, doktorların müdahalesine rağmen hayatlarını
kaybederler.
Kalpten sonra en çok etkilenen ikinci organ beyindir. Beyindeki damarların
tıkanması ya da bazen yırtılıp kanamaları yüzünden “felç” oluşur.
Üçüncü sırada alt üyelere yani uyluk, bacak ve ayağa giden damarların tıkanması
vardır. Onlar tıkanınca “kangren” denilen ve tıkanan yerde çürümeye neden olan, o
yüzden de kesip çıkarılmalarını gerektiren hastalık gelişir.
Damar sertliğinin çokça etkilediği ve bizim için önemi fazla olan iki organ daha
vardır. Bunlar göz ve böbrektir. Đlki körlüğe, ikincisi idrarın atılamamasına kadar
gidebilen kötü sonuçlar doğurabilir.
Yukarıda sıraladığımız hastalıklar, günümüzde insanların ölüm nedenlerinin yarısını
oluşturmaktadır. Yani, günümüzde, her iki kişiden biri, damar sertliği yüzünden
ölmektedir. Bu yüzden, son zamanlarda tıp, damar sertliğine bağlı hastalıklar
konusunda seferber olmuştur. Bu hastalıkların nasıl önlenebilecekleri ve bu
hastalıkların nasıl daha iyi tedavi edilebilecekleri son zamanların en önemli çalışma
konusudur.
Tansiyon, zarar vermek için bazen yıllarca damarların bozulmasını
beklemeyebilmektedir. Damarda önceden var olan bir baloncuk (anevrizma),
tansiyon yükselince patlayıp, anî ölüme neden olabilmektedir. Ya da, kalp pompası
bir başka nedenle bozulmuşsa, yükselen tansiyon, kalp yetmezliğini ölüme
götürebilecek kadar kötüleştirebilmektedir.
Ancak tansiyonun zararı, başta da söylediğimiz gibi, daha çok damarları bozması
yoluyladır. Tansiyon, damarı, yıllar içinde yavaş yavaş ama kararlı bir şekilde bozar.
38
Sonunda, yukarda saydığımız kötü sonuçlara ve ölüme kadar götürür. Bu yüzden
tansiyona “sinsi katil” denmektedir.
SĐSTOLĐK BASINÇ. Kalp kasılıp vücuda kan pompalarken atardamarda oluşan
basınç sistolik olarak adlandırılır.
Şekil 3.6. Sistolik Basınç
DĐASTOLĐK BASINÇ. Kalbe kan geri toplanırken atardamarlarda oluşan basınç
diastolik olarak adlandırılır.
Şekil 3.7. Diastolik Basınç
3.2. Normal Tansiyon Değerleri Nelerdir?
Tıpta genel olarak herkesin bünyesinin farklı olduğunu bilmek gerekir. Bu nedenle
herkesin tansiyon ölçüm değerlerinin aynı olması beklenemez. Bu nedenle bir kişide
tansiyonun yükselmiş ya da düşmüş olduğundan bahsedebilmek için, herhangi bir
şikayetinin ya da hastalığının olmadığı dönemde tansiyonunun zaman zaman ölçülüp
değerlerinin bir kenara kaydedilmesi yararlıdır.
39
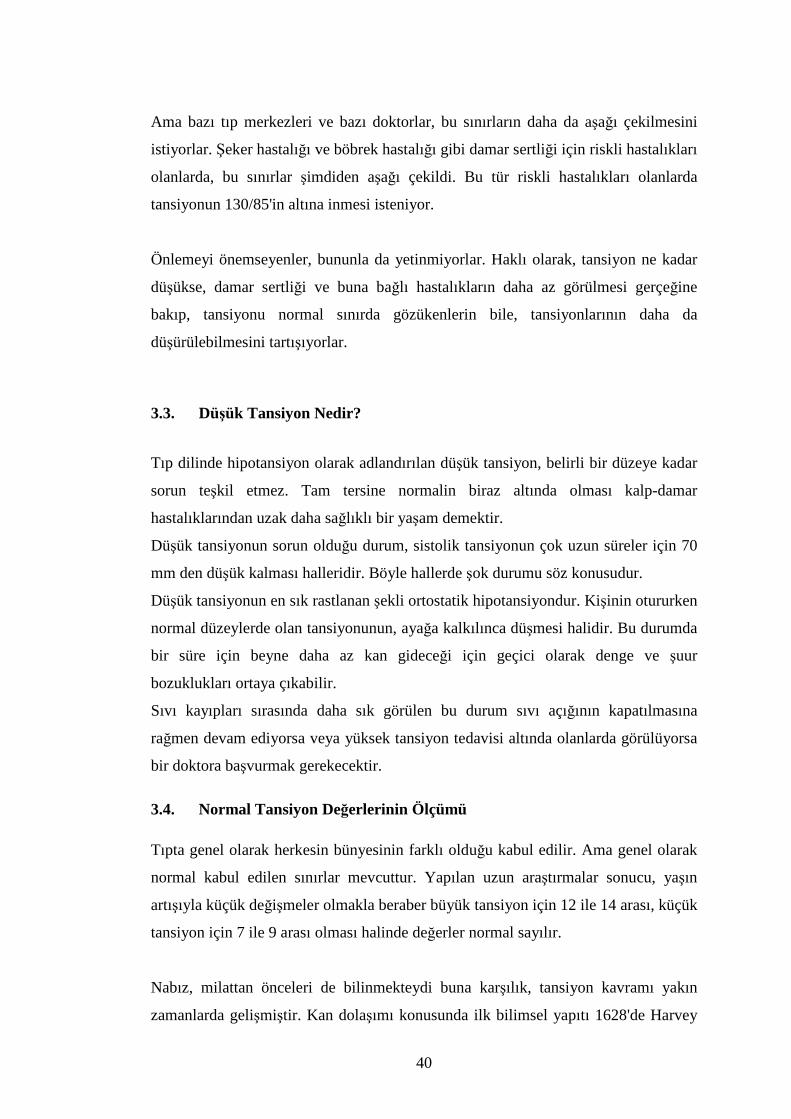
Şekil 3.8. Basınç Oranlarına Göre Tansiyon Değerleri
Herkesin tansiyon değerlerinin farklı olduğundan bahsettik ama genel olarak normal
kabul edilen sınırları da ihmal etmemek gerekir.
Yapılan uzun araştırmalar sonucu, yaşın artışıyla küçük değişmeler olmakla beraber
sistolik (büyük) tansiyon için 120 ile 140, ya da Türkiye'de yaygın söylendiği gibi 12
ile 14 arası, diastolik (küçük) tansiyon için 70-90 ya da 7-9 arası olması halinde
tansiyona bağlı olarak bir sağlık sorunu riski doğmadığı belirlenmiştir.
Nasıl herkesin boyu farklı farklıysa, tansiyonu da farklıdır. Nasıl, kısa birine ya da
uzun birine “anormal” demek kolay değilse, normal tansiyonu tarif etmek de zordur.
Üstelik yaşa ve kiloya göre de çok büyük değişiklikler gösterir. Yaş ve kilo arttıkça,
genelde tansiyon daha yüksektir.
Bu durumda, tıpkı boyda olduğu gibi, belli bir yaştakilerin ortalama tansiyonunun ne
olduğuna bakılabilir. Ama son yıllarda, daha çok, tansiyonu kaç olanların, ne kadar
sağlıklı olduğuna bakılmaya başlandı. Yani damar sertliği olanların tansiyonlarıyla,
sağlam olanların tansiyonları karşılaştırılmaya başlandı.
Sonuçta, tansiyon ne kadar artarsa, tansiyona bağlı hastalıkların ve ölümlerin o kadar
arttığı görüldü. Önceleri büyük tansiyonu 165, küçük tansiyonu 95 mmHg ‘dan daha
yüksek olanların tedavisinin gerektiği düşünülüyordu. Ama şimdi, bu sınırlar daha
aşağı indirildi; 140 ve 90 olarak. Yani büyük tansiyonu 140 ve/veya küçük tansiyonu
90'ın üstündekilerin yüksek tansiyonu olduğu kabul ediliyor ve bunlara
“H ĐPERTANSĐYON HASTASI” deniyor.
40
Ama bazı tıp merkezleri ve bazı doktorlar, bu sınırların daha da aşağı çekilmesini
istiyorlar. Şeker hastalığı ve böbrek hastalığı gibi damar sertliği için riskli hastalıkları
olanlarda, bu sınırlar şimdiden aşağı çekildi. Bu tür riskli hastalıkları olanlarda
tansiyonun 130/85'in altına inmesi isteniyor.
Önlemeyi önemseyenler, bununla da yetinmiyorlar. Haklı olarak, tansiyon ne kadar
düşükse, damar sertliği ve buna bağlı hastalıkların daha az görülmesi gerçeğine
bakıp, tansiyonu normal sınırda gözükenlerin bile, tansiyonlarının daha da
düşürülebilmesini tartışıyorlar.
3.3. Düşük Tansiyon Nedir?
Tıp dilinde hipotansiyon olarak adlandırılan düşük tansiyon, belirli bir düzeye kadar
sorun teşkil etmez. Tam tersine normalin biraz altında olması kalp-damar
hastalıklarından uzak daha sağlıklı bir yaşam demektir.
Düşük tansiyonun sorun olduğu durum, sistolik tansiyonun çok uzun süreler için 70
mm den düşük kalması halleridir. Böyle hallerde şok durumu söz konusudur.
Düşük tansiyonun en sık rastlanan şekli ortostatik hipotansiyondur. Kişinin otururken
normal düzeylerde olan tansiyonunun, ayağa kalkılınca düşmesi halidir. Bu durumda
bir süre için beyne daha az kan gideceği için geçici olarak denge ve şuur
bozuklukları ortaya çıkabilir.
Sıvı kayıpları sırasında daha sık görülen bu durum sıvı açığının kapatılmasına
rağmen devam ediyorsa veya yüksek tansiyon tedavisi altında olanlarda görülüyorsa
bir doktora başvurmak gerekecektir.
3.4. Normal Tansiyon Değerlerinin Ölçümü Tıpta genel olarak herkesin bünyesinin farklı olduğu kabul edilir. Ama genel olarak
normal kabul edilen sınırlar mevcuttur. Yapılan uzun araştırmalar sonucu, yaşın
artışıyla küçük değişmeler olmakla beraber büyük tansiyon için 12 ile 14 arası, küçük
tansiyon için 7 ile 9 arası olması halinde değerler normal sayılır.
Nabız, milattan önceleri de bilinmekteydi buna karşılık, tansiyon kavramı yakın
zamanlarda gelişmiştir. Kan dolaşımı konusunda ilk bilimsel yapıtı 1628'de Harvey
41
yayınladı. Ardından 1727'de Stephen Hales, tansiyonu ölçmek için ilk deneyini yaptı.
Bu deney, U harfi şeklinde bir borucuğun atardamara yerleştirilip, borucuktaki kan
düzeyinin gözlenmesi ile yapıldı. Bu iş için Hales bir at kullandı. Daha sonra bazı
araştırmacılar aynı yolu değişik hayvanlarda, daha geliştirilmi ş araçlar kullanarak
uyguladı. Bu yüzyıl başında ise, damara girilmeden tansiyon ölçmeyi sağlayan
dolaylı yollar geliştirildi. Bunlardan en yaygın olanı kola ya da bileğe takılan
tansiyon aletleridir.
3.5. Tansiyon nasıl ölçülür?
Tansiyon ölçmekte kullanılan değişik aletler bulunmaktadır. En doğru ölçüm, zaman
içinde ayarlarının değişmesi gibi bir sorun olmadığı için, cıvalı aletlerle yapılırsa da
bunların kullanımı pek pratik olmadığı için diğer türdeki aletler tercih edilmektedir.
Tüm aletlerde prensip aynıdır. Kola sarılan ve içine hava gönderilerek basınç
oluşturulan bir lastik torba (manşon), bu torbaya hava göndermek için kullanılan bir
pompa ve lastik torbanın içindeki basıncı ölçen bir ölçü sistemi. Ayrıca damarda
oluşacak nabız seslerini dinlemek için bir dinleme aleti (steteskop) da gereklidir.
Tansiyonu ölçülecek kişinin dinlenmiş ve sakin durumda olması gerekmektedir.
Hızlı bir yürüyüşün ardından tansiyon ölçülmesi için bir süre dinlenmek gerekir.
Rahat bir koltukta otururken, tansiyon ölçülen kolun kalp hizasında olmasına dikkat
edilmelidir.
Böyle bir alet edindikten ve uygun ortamı sağladıktan sonra aletin manşon kısmı
tansiyonu ölçülecek kişinin kolunun üst kısmına sarılır. Bu sırada, dirsek önü
çukurunun tamamen açıkta kalmasına ve giysilerin kolu sıkmamasına dikkat etmek
gerekir. Tansiyonu ölçülen kişi rahat bir şekilde ve kolu kalp hizasında olacak
şekilde otururken, pompa ile basınç oluşturulmaya başlanılır. Aletin göstergesindeki
rakam, kişinin daha önceden bilinen tansiyon değeri varsa bunun 20-30 mm üzerine,
böyle bir bilgi yoksa 150-160 mm civarına kadar çıkartılır. Bu sırada dinleme aleti,
dirsek önü çukurunun gövdeye yakın kısmına konulup, hafifçe bastırılarak
(manşonun altına sıkıştırarak değil) nabız sesleri olup olmadığı dinlenir. Eğer sesler
42
varsa kayboluncaya kadar basıncı arttırmak gerekir. Basın kaybolduktan sonra aletin
havası yavaşça indirilerek nabız sesleri tekrar başlayıncaya kadar takip edilir.
Seslerin ilk duyulduğu sırada aletin göstergesinde okunan rakam sistolik tansiyonu
gösterir.
Sürekli dinlerken basınç azaltılmaya devam edilir. Seslerin artık duyulmamaya
başladığı sırada göstergedeki rakam da diastolik tansiyonu gösterir.
3.6. Basınç Oranlarına Göre Tansiyon Değerleri
Kan basıncı aniden yükselirse damarların çeperini yırtarak kanamaya neden olabilir.
Kanama, burun gibi dışa açık bir organdaysa, sorun kan kaybı riskidir, beyin gibi
kapalı ortamda oluştuğunda ise beyin dokusu damarın içinden çıkan kan kütlesi
içinde sıkışıp kalıcı hasara uğrar. Bunun sonucu felçler ve hatta hayati tehlikeler
meydana gelebilir. Tansiyonun aşırı yükselmesi hallerinde, bir diğer tehlike
damarlardan sıvı sızması ile beyin ödeminin meydana gelmesidir.
Yüksek tansiyonun kalıcı olması; felç, kalp krizi ve böbrek hastalığı gibi ciddi
sorunlara sebep olabilir. Bu yüzden, yüksek tansiyonun sürekli olarak kontrol
edilmesi gerekir. Yüksek tansiyon genellikle uyarıcı belirtiler göstermediğinden kan
basıcının yüksek olduğunun anlaşılmasının en güvenli yolu düzenli olarak ölçüm
yaptırmaktır.
Yüksek tansiyonun tanımı, sistolik basıncın 160 mm cıva (veya üzerinde olması) ve
diastolik basıncın 95 mm cıva''dan yüksek olmasıdır. Bu düzeyler arasındaki
basınçlar ile normal değerler arasındaki değerler (140 mm cıvanın üzerinde olan bir
sistolik basınç ve 90 mm cıvanın üzerinde olan bir diastolik basınç) "sınırda yüksek
tansiyon" olarak kabul edilir.
Başta dolgunluk hissi, başın arka tarafından ağrı, kulak çınlaması, görme bulanıklığı,
bulantı gibi belirtiler bulunabilir veya hiçbir belirti de olmayabilir.
43
3.7. Stetoskop Đle Kan Basıncının Ölçüm Koşulları
Kan basıncının ölçümünde kullanılan mekanik, cıvalı ve elektronik tipte aletler
vardır. Kullanımları pratik olmakla birlikte bu aletleri kullanırken bazı noktalar
dikkate etmek gerekir. Mesaneniz doluysa ya da kısa bir süre önce kahve veya sigara
içmişseniz kan basıncınız yüksek çıkabilir. Kan basıncı ölçümünden önce 5 dakika
sakin bir şekilde oturmak gerekir. Ölçüm sırasında kolunuz bir masa veya
sandalyenin kolu üzerinde ve kalp hizasında olmalıdır.
Sağ kolunu kullananlarda tansiyon sol koldan, sol kolunu kullananlarda ise sağ
koldan ölçülmelidir. Aletin manşonu (şişen bölümü) üst kola takılır, manşonun alt
kenarı dirsekten 2.5 cm kadar yukarıda olmalı ve kola iyi oturmalıdır. Aletle birlikte
kullanılan ve nabız seslerini dinlemeye yarayan stetoskobun tamburu, kolun
içyüzünde bükülmüş dirseğin üzerinde manşonun hemen altına yerleştirildikten sonra
aletin manşonu şişirilir ve göstergeye bakılarak ibre hızlı olarak, beklenen sistolik
basınç değerine 30 mmHg yukarısına kadar yükseltilir. Balonun ucundaki vida
açılarak basınç saniyesi 2-3 mmHg düşecek şekilde yavaş yavaş söndürülür. Basınç
düşerken nabız sesleri dinlenir ve seslerin ilk duyulduğu nokta sistolik basıncı,
atımların son duyulduğu nokta ise diastolik basıncı gösterir. Ölçümü doğrulamak için
bu işlem bir kez daha tekrarlanır.
3.8. Tansiyona Etkileri Tartı şılan Diğer Etmenler
Tansiyona etkisi en fazla tartışılan şeylerin başında bazı mineraller gelmektedir.
Üstünde en çok durulanlar potasyum, kalsiyum ve magnezyumdur. Ama tuzdan yani
sodyum mineralinden farklı olarak, bu minerallerin azaltılması değil, arttırılması
tavsiye edilmektedir.
Bunlardan potasyum, daha iyi bir tansiyon için, daha fazla alınması gerektiği
konusunda, herkesin üstünde anlaştığı bir maddedir. Günde 3.5 gramın üstüne
çıkılması önerilmektedir. Sodyum ne kadar düşük, potasyum ne kadar fazlaysa,
tansiyon o kadar iyi olmaktadır. Gerçekten de, bir çalışmada, potasyum alımını
yalnızca yarım gr kadar artırmanın, felç riskini %40 azalttığı gösterilmiştir. Ama,
44
bunu potasyumlu tuzlar alarak başarmak tavsiye edilmemektedir. Doğru olan şey
potasyumdan zengin besinlerle bunu başarmaktır. Bunun içinse, bol sebze-meyve
tavsiye edilmektedir. Özellikle, 100gr'daki potasyum açısından, kahve, kuru
baklagiller, fındık, marul, maydanoz, ıspanak, patates, enginar, muz, havuç başta
gelen besinler olarak sayılabilir.
Kalsiyum için tavsiye edilen miktar günde 800-1200 mg, magnezyum için 280-350
mg'dır. Bu minerallerin en yoğun olduğu besinlerse süt ve süt ürünleridir. Ayrıca
kalsiyum için pekmez, susam, fındık, fıstık, yeşil yapraklı sebzeler, kuru baklagiller
ve kurutulmuş meyveler; magnezyum için ıspanak, kuru baklagil, ekmek, badem,
fıstık sayılabilir.
Daha az yağ ve daha çok lif tüketmenin, kilo vermenin ötesinde, tansiyona yarar
sağladığı iddia edilmektedir. Gerçekten de, yalnızca bitkisel besinlerle beslenenlerde
(vegan), her türlü besinle beslenenlere (omnivor) göre, - tuz tüketimleri anlamlı farklı
olmasa bile- daha az tansiyon yüksekliği görüldüğü bildirilmiştir. Buna karşılık bir
çalışmada günde 3,7 gr balık yağının yaşlılarda, hafif bir tansiyon düşmesi sağladığı
yayımlanmıştır. Kimileri kahve gibi, kafeinli içecekleri de az tüketmeyi
önermektedir.
3.9. Büyük Tansiyon, Küçük Tansiyon ve Ortalama Tansiyon Nedir?
Doktorlar büyük tansiyona sistolik, küçük tansiyona ise diastolik tansiyon adını
verirler. Bu şu anlama gelir. Örneğin bir kişinin tansiyonu 12/8 ise (doktorlar 120/80
olarak adlandırırlar), 12 büyük tansiyon, 8 ise küçük tansiyondur. Bu deyimler şu
mekanizmalarla oluşurlar. Đnsanın kalbinin dakikada ortalama olarak 70 defa attığını
kabul edersek, kalp kanı damarların içine 70 defa attığını gösterir. Đşte her bir atım
sırasında kalbin içinde bulunduğu duruma sistol adı verilir. Hemen bu atımın
ardından, kalp istirahat haline geçer, gevşer, kan kalbe dolmaya başlar. Đşte bu
devreye diyastol adı verilir. Đşte bu sistol sırasında kalbin damarlara kan atması
sistolik yani büyük tansiyonu, gevşeme anında damarların içinde bulunduğu durum
ise küçük yani diastolik tansiyonu oluşturur. Đki tansiyon da önemlidir, ancak son
zamanlarda büyük tansiyonun kalp ve damar hastalıklarının oluşmasında daha

45
önemli olduğuna dair görüşler çok artmıştır ve daha çok kabul görmektedir. Kan
basıncının ortalama değeri, hücrelere verilen besin maddesi miktarını belirlediği için
önemli bir büyüklüktür. Biz tansiyonu ölçerken büyük ve küçük tansiyonu ölçeriz.
Şekil 3.9.’da arter basıncının zamanla değişimini, sistolik, diyastolik basınçları,
ortalama basıncı yaklaşık ve tam veren bağıntılar gösterilmiştir.
Şekil 3.9. Arter Basıncının Değişimi ve Ortalama Basıncı Veren Bağıntılar
3.10. Neden Tansiyonum Đnip Çıkıyor?
Kan basıncı kalbin her atışında değiştiği gibi gün içinde de çeşitli dalgalanmalar
gösterir, bu doğal dalgalanmaya etki eden dış sebepler vardır, bunlar:
• Isı (çok sıcak veya çok soğuk)
• Stres
• Korku
• Kabızlık
• Nem
• Kızgınlık
• Huzursuzluk
• Endişe
• Kişiye ait fiziksel koşullar
• Yiyecek ve Đçecek Tüketimi

46
3.11. Ölçüm Yöntemleri: Kan basıncının belirlenmesinde,
a.Direkt (doğrudan ölçüm - "invasive") yöntemler,
b.Đndirekt (dolaylı -"noninvasive") yöntemler kullanılmaktadır.
3.11.1. Direkt Yöntemler
Bir kateter yardımıyla arter veya ven içerisinden basıncın ölçüleceği noktaya ulaşılır
ve ölçüm yapılır. [3] Direkt yöntemde basınç ölçümü iki şekilde yapılabilir:
Şekil 3.10. Sıstolik ve Diastolik Basman Erkeklerde Yaşa Göre Değişimi
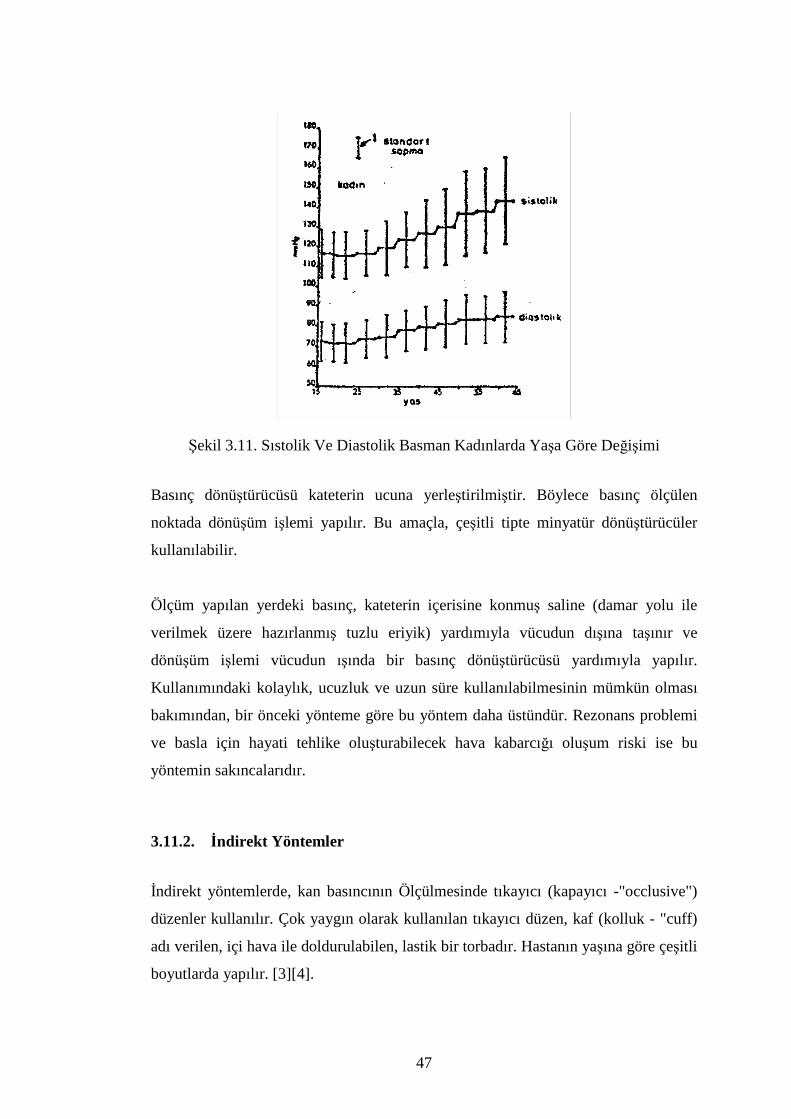
47
Şekil 3.11. Sıstolik Ve Diastolik Basman Kadınlarda Yaşa Göre Değişimi
Basınç dönüştürücüsü kateterin ucuna yerleştirilmi ştir. Böylece basınç ölçülen
noktada dönüşüm işlemi yapılır. Bu amaçla, çeşitli tipte minyatür dönüştürücüler
kullanılabilir.
Ölçüm yapılan yerdeki basınç, kateterin içerisine konmuş saline (damar yolu ile
verilmek üzere hazırlanmış tuzlu eriyik) yardımıyla vücudun dışına taşınır ve
dönüşüm işlemi vücudun ışında bir basınç dönüştürücüsü yardımıyla yapılır.
Kullanımındaki kolaylık, ucuzluk ve uzun süre kullanılabilmesinin mümkün olması
bakımından, bir önceki yönteme göre bu yöntem daha üstündür. Rezonans problemi
ve basla için hayati tehlike oluşturabilecek hava kabarcığı oluşum riski ise bu
yöntemin sakıncalarıdır.
3.11.2. Đndirekt Yöntemler
Đndirekt yöntemlerde, kan basıncının Ölçülmesinde tıkayıcı (kapayıcı -"occlusive")
düzenler kullanılır. Çok yaygın olarak kullanılan tıkayıcı düzen, kaf (kolluk - "cuff)
adı verilen, içi hava ile doldurulabilen, lastik bir torbadır. Hastanın yaşına göre çeşitli
boyutlarda yapılır. [3][4].
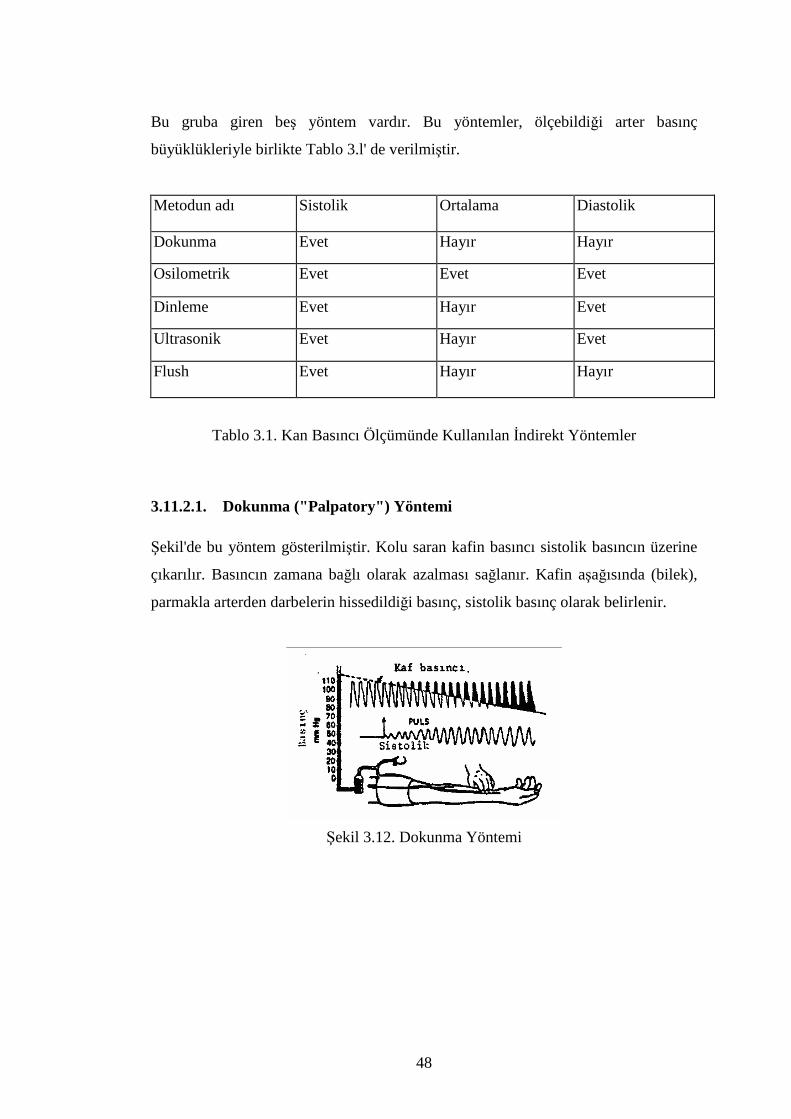
48
Bu gruba giren beş yöntem vardır. Bu yöntemler, ölçebildiği arter basınç
büyüklükleriyle birlikte Tablo 3.l' de verilmiştir.
Metodun adı Sistolik Ortalama Diastolik
Dokunma Evet Hayır Hayır
Osilometrik Evet Evet Evet
Dinleme Evet Hayır Evet
Ultrasonik Evet Hayır Evet
Flush Evet Hayır Hayır
Tablo 3.1. Kan Basıncı Ölçümünde Kullanılan Đndirekt Yöntemler
3.11.2.1. Dokunma ("Palpatory") Yöntemi Şekil'de bu yöntem gösterilmiştir. Kolu saran kafin basıncı sistolik basıncın üzerine
çıkarılır. Basıncın zamana bağlı olarak azalması sağlanır. Kafin aşağısında (bilek),
parmakla arterden darbelerin hissedildiği basınç, sistolik basınç olarak belirlenir.
Şekil 3.12. Dokunma Yöntemi
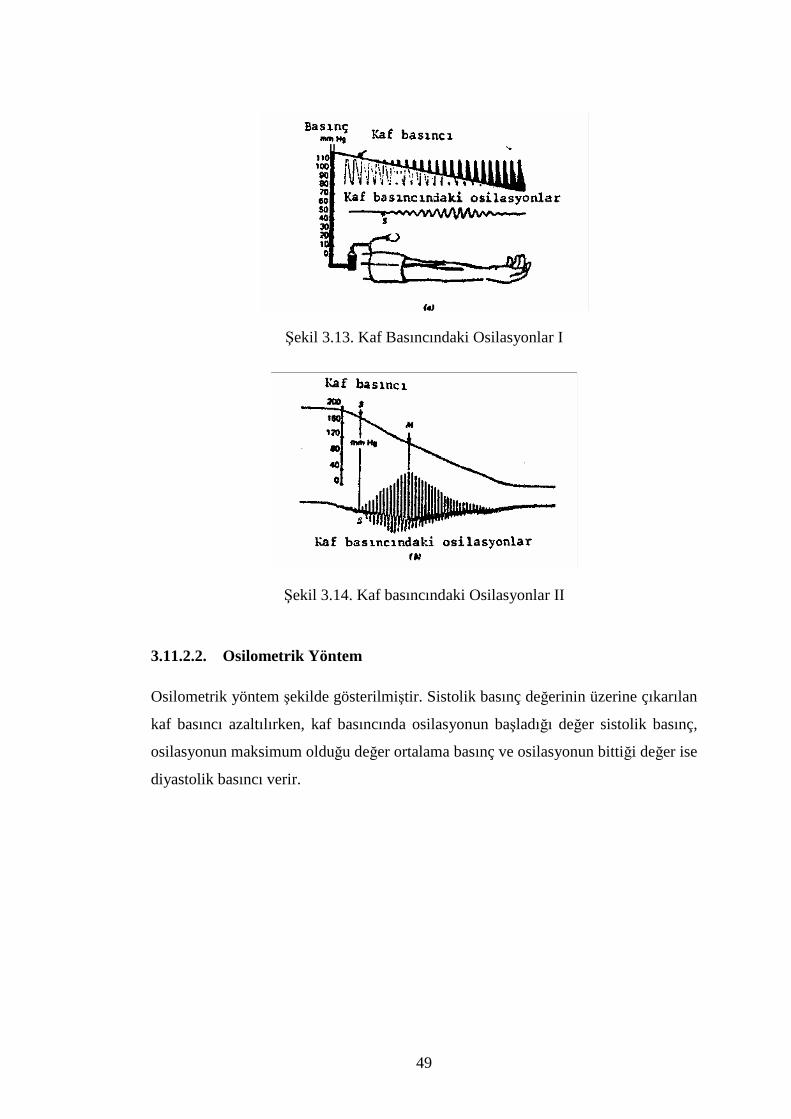
49
Şekil 3.13. Kaf Basıncındaki Osilasyonlar I
Şekil 3.14. Kaf basıncındaki Osilasyonlar II
3.11.2.2. Osilometrik Yöntem Osilometrik yöntem şekilde gösterilmiştir. Sistolik basınç değerinin üzerine çıkarılan
kaf basıncı azaltılırken, kaf basıncında osilasyonun başladığı değer sistolik basınç,
osilasyonun maksimum olduğu değer ortalama basınç ve osilasyonun bittiği değer ise
diyastolik basıncı verir.
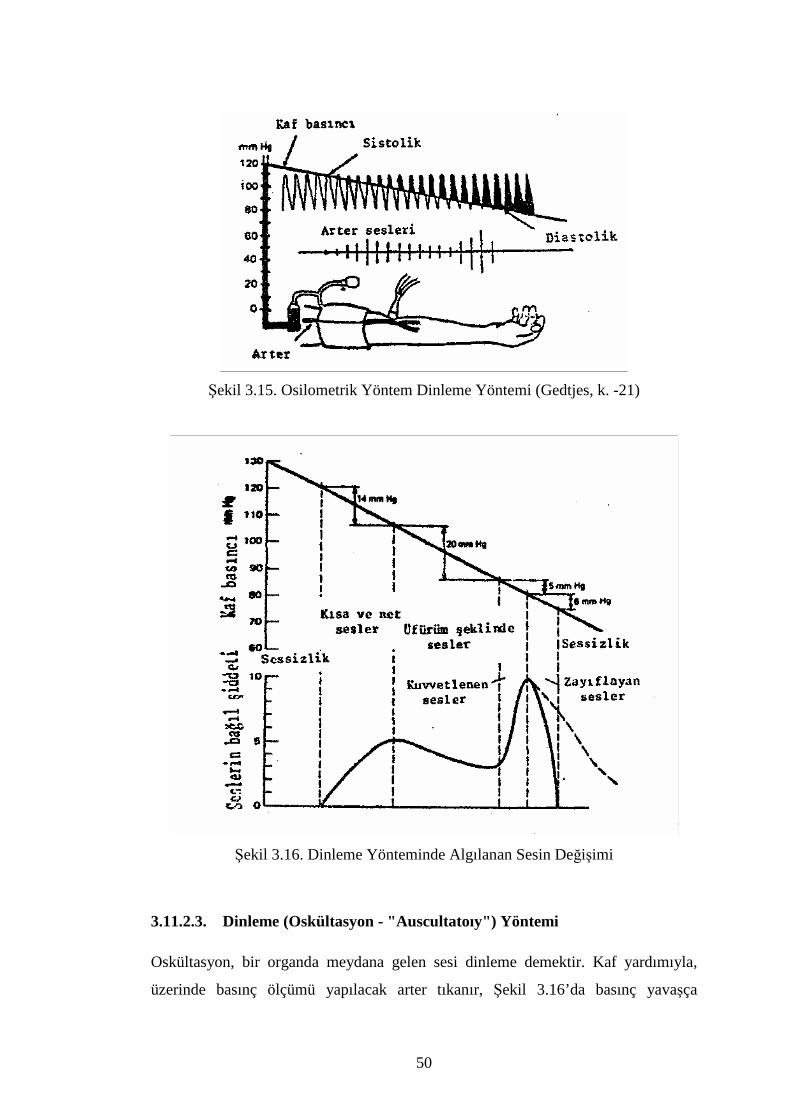
50
Şekil 3.15. Osilometrik Yöntem Dinleme Yöntemi (Gedtjes, k. -21)
Şekil 3.16. Dinleme Yönteminde Algılanan Sesin Değişimi
3.11.2.3. Dinleme (Oskültasyon - "Auscultatoıy") Yöntemi Oskültasyon, bir organda meydana gelen sesi dinleme demektir. Kaf yardımıyla,
üzerinde basınç ölçümü yapılacak arter tıkanır, Şekil 3.16’da basınç yavaşça
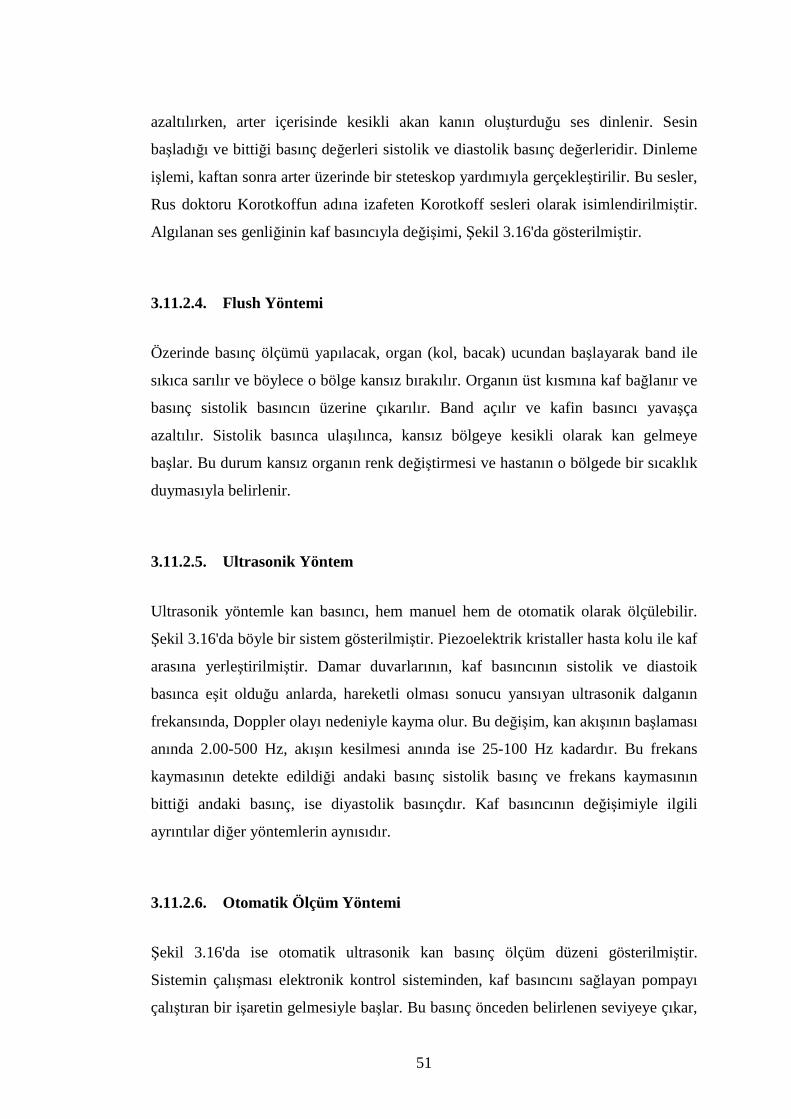
51
azaltılırken, arter içerisinde kesikli akan kanın oluşturduğu ses dinlenir. Sesin
başladığı ve bittiği basınç değerleri sistolik ve diastolik basınç değerleridir. Dinleme
işlemi, kaftan sonra arter üzerinde bir steteskop yardımıyla gerçekleştirilir. Bu sesler,
Rus doktoru Korotkoffun adına izafeten Korotkoff sesleri olarak isimlendirilmiştir.
Algılanan ses genliğinin kaf basıncıyla değişimi, Şekil 3.16'da gösterilmiştir.
3.11.2.4. Flush Yöntemi
Özerinde basınç ölçümü yapılacak, organ (kol, bacak) ucundan başlayarak band ile
sıkıca sarılır ve böylece o bölge kansız bırakılır. Organın üst kısmına kaf bağlanır ve
basınç sistolik basıncın üzerine çıkarılır. Band açılır ve kafin basıncı yavaşça
azaltılır. Sistolik basınca ulaşılınca, kansız bölgeye kesikli olarak kan gelmeye
başlar. Bu durum kansız organın renk değiştirmesi ve hastanın o bölgede bir sıcaklık
duymasıyla belirlenir.
3.11.2.5. Ultrasonik Yöntem
Ultrasonik yöntemle kan basıncı, hem manuel hem de otomatik olarak ölçülebilir.
Şekil 3.16'da böyle bir sistem gösterilmiştir. Piezoelektrik kristaller hasta kolu ile kaf
arasına yerleştirilmi ştir. Damar duvarlarının, kaf basıncının sistolik ve diastoik
basınca eşit olduğu anlarda, hareketli olması sonucu yansıyan ultrasonik dalganın
frekansında, Doppler olayı nedeniyle kayma olur. Bu değişim, kan akışının başlaması
anında 2.00-500 Hz, akışın kesilmesi anında ise 25-100 Hz kadardır. Bu frekans
kaymasının detekte edildiği andaki basınç sistolik basınç ve frekans kaymasının
bittiği andaki basınç, ise diyastolik basınçdır. Kaf basıncının değişimiyle ilgili
ayrıntılar diğer yöntemlerin aynısıdır.
3.11.2.6. Otomatik Ölçüm Yöntemi
Şekil 3.16'da ise otomatik ultrasonik kan basınç ölçüm düzeni gösterilmiştir.
Sistemin çalışması elektronik kontrol sisteminden, kaf basıncını sağlayan pompayı
çalıştıran bir işaretin gelmesiyle başlar. Bu basınç önceden belirlenen seviyeye çıkar,
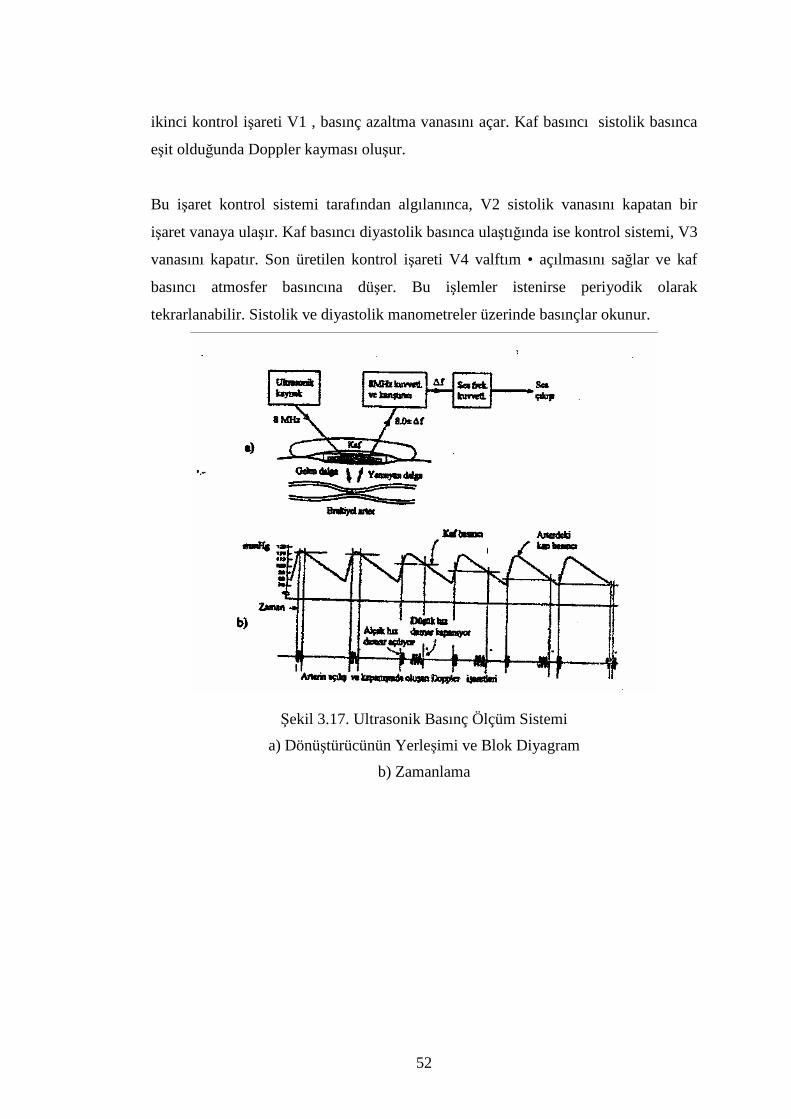
52
ikinci kontrol işareti V1 , basınç azaltma vanasını açar. Kaf basıncı sistolik basınca
eşit olduğunda Doppler kayması oluşur.
Bu işaret kontrol sistemi tarafından algılanınca, V2 sistolik vanasını kapatan bir
işaret vanaya ulaşır. Kaf basıncı diyastolik basınca ulaştığında ise kontrol sistemi, V3
vanasını kapatır. Son üretilen kontrol işareti V4 valftım • açılmasını sağlar ve kaf
basıncı atmosfer basıncına düşer. Bu işlemler istenirse periyodik olarak
tekrarlanabilir. Sistolik ve diyastolik manometreler üzerinde basınçlar okunur.
Şekil 3.17. Ultrasonik Basınç Ölçüm Sistemi
a) Dönüştürücünün Yerleşimi ve Blok Diyagram
b) Zamanlama
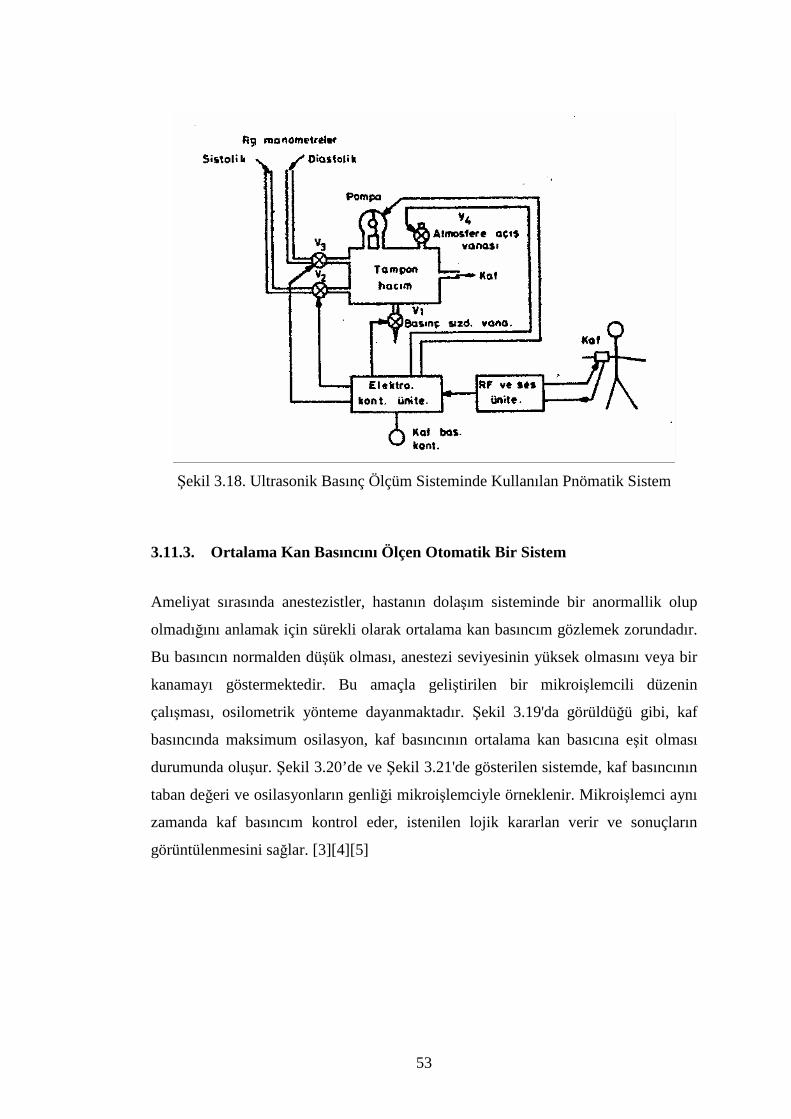
53
Şekil 3.18. Ultrasonik Basınç Ölçüm Sisteminde Kullanılan Pnömatik Sistem
3.11.3. Ortalama Kan Basıncını Ölçen Otomatik Bir Sistem
Ameliyat sırasında anestezistler, hastanın dolaşım sisteminde bir anormallik olup
olmadığını anlamak için sürekli olarak ortalama kan basıncım gözlemek zorundadır.
Bu basıncın normalden düşük olması, anestezi seviyesinin yüksek olmasını veya bir
kanamayı göstermektedir. Bu amaçla geliştirilen bir mikroişlemcili düzenin
çalışması, osilometrik yönteme dayanmaktadır. Şekil 3.19'da görüldüğü gibi, kaf
basıncında maksimum osilasyon, kaf basıncının ortalama kan basıcına eşit olması
durumunda oluşur. Şekil 3.20’de ve Şekil 3.21'de gösterilen sistemde, kaf basıncının
taban değeri ve osilasyonların genliği mikroişlemciyle örneklenir. Mikroişlemci aynı
zamanda kaf basıncım kontrol eder, istenilen lojik kararlan verir ve sonuçların
görüntülenmesini sağlar. [3][4][5]
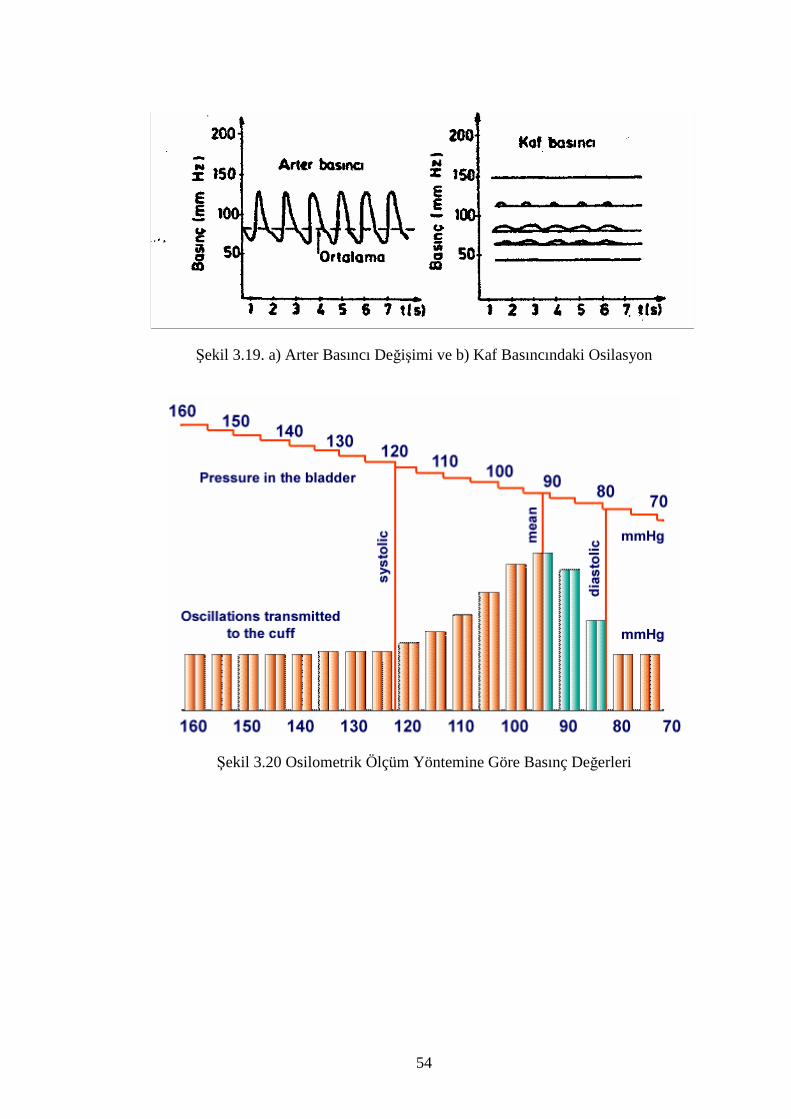
54
Şekil 3.19. a) Arter Basıncı Değişimi ve b) Kaf Basıncındaki Osilasyon
Şekil 3.20 Osilometrik Ölçüm Yöntemine Göre Basınç Değerleri
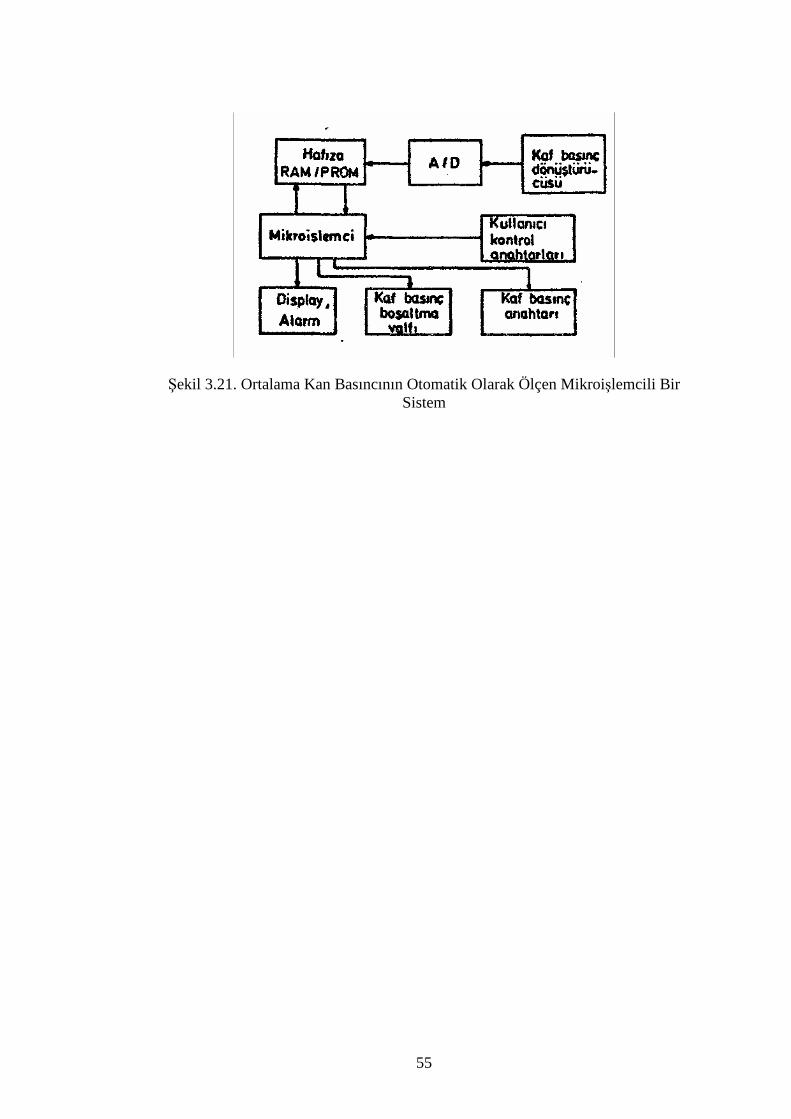
55
Şekil 3.21. Ortalama Kan Basıncının Otomatik Olarak Ölçen Mikroişlemcili Bir Sistem
4. BÖLÜM CC1020 NORROW BANDLI UYGULAMLAR ĐÇĐN DÜŞÜK GÜÇLÜ RF TRANCEIVER [6]
4.1. Uygulamaları
• 12.5 ve 25 KHz’den daha fazla kanal boşluğu ile düşük güçte kablosuz UHF
veri alma ve verme
• 402 / 424 / 426 / 429 / 433 / 447 / 449 / 469 / 868 ve 915 MHz ISM/SRD
band sistemleri
• AMR (Antenin giriş gücünün ölçülmesi)
• Kablosuz alarm ve güvenlik sistemleri
• Ev otomasyonu
• Düşük güçlü telemetri
4.2. Ürün Özellikleri
CC1020 düşük gerilim ve düşük güç gerektiren kablosuz uygulamalar için
tasarlanmıştır. CC1020 daha çok ISM için ve SRD frekansları (402 / 424 / 426 / 429 /
433 / 447 / 449 / 469 / 868 ve 915) için tasarlanmıştır. Sistem aynı zamanda diğer
frekanslarda ,402 - 470 ve 804 - 940 MHz, kolayca çoklu kanal uygulamaları için
programlanabilir.
CC1020 temel uygulama parametreleri seri port üzerinden programlanabilir ve bu
CC1020’yi esnek ve kullanılmasını kolaylaştırır.
Temel özellikler içeren sistemlerde CC1020 microdenetleyicilerle çok az dış pasif
elemanlar eklenilerek kullanılır.
CC1020, Chipcon® firmasının ürettiği bir eleman olup, SmartRF® – 02 teknolojisi,
0.35µm CMOS, ile üretilmiştir.
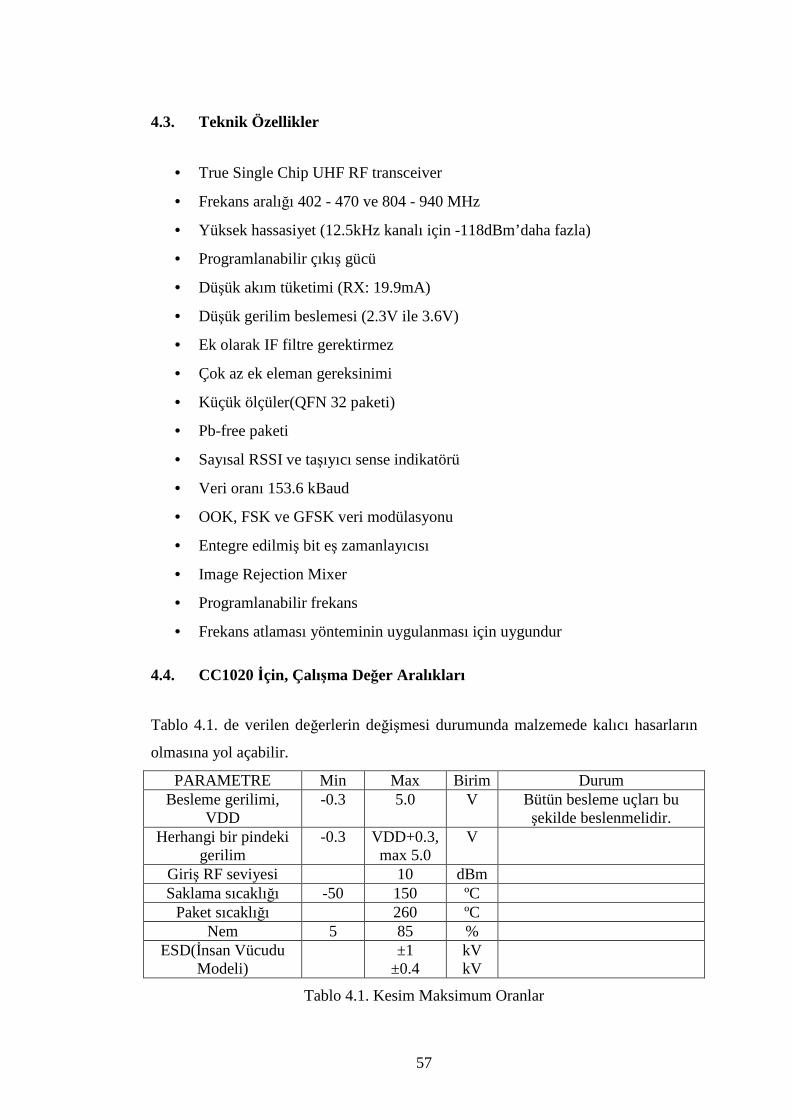
57
4.3. Teknik Özellikler
• True Single Chip UHF RF transceiver
• Frekans aralığı 402 - 470 ve 804 - 940 MHz
• Yüksek hassasiyet (12.5kHz kanalı için -118dBm’daha fazla)
• Programlanabilir çıkış gücü
• Düşük akım tüketimi (RX: 19.9mA)
• Düşük gerilim beslemesi (2.3V ile 3.6V)
• Ek olarak IF filtre gerektirmez
• Çok az ek eleman gereksinimi
• Küçük ölçüler(QFN 32 paketi)
• Pb-free paketi
• Sayısal RSSI ve taşıyıcı sense indikatörü
• Veri oranı 153.6 kBaud
• OOK, FSK ve GFSK veri modülasyonu
• Entegre edilmiş bit eş zamanlayıcısı
• Image Rejection Mixer
• Programlanabilir frekans
• Frekans atlaması yönteminin uygulanması için uygundur
4.4. CC1020 Đçin, Çalışma Değer Aralıkları
Tablo 4.1. de verilen değerlerin değişmesi durumunda malzemede kalıcı hasarların
olmasına yol açabilir.
PARAMETRE Min Max Birim Durum Besleme gerilimi,
VDD -0.3 5.0 V Bütün besleme uçları bu
şekilde beslenmelidir. Herhangi bir pindeki
gerilim -0.3 VDD+0.3,
max 5.0 V
Giriş RF seviyesi 10 dBm Saklama sıcaklığı -50 150 ºC
Paket sıcaklığı 260 ºC Nem 5 85 %
ESD(Đnsan Vücudu Modeli)
±1 ±0.4
kV kV
Tablo 4.1. Kesim Maksimum Oranlar
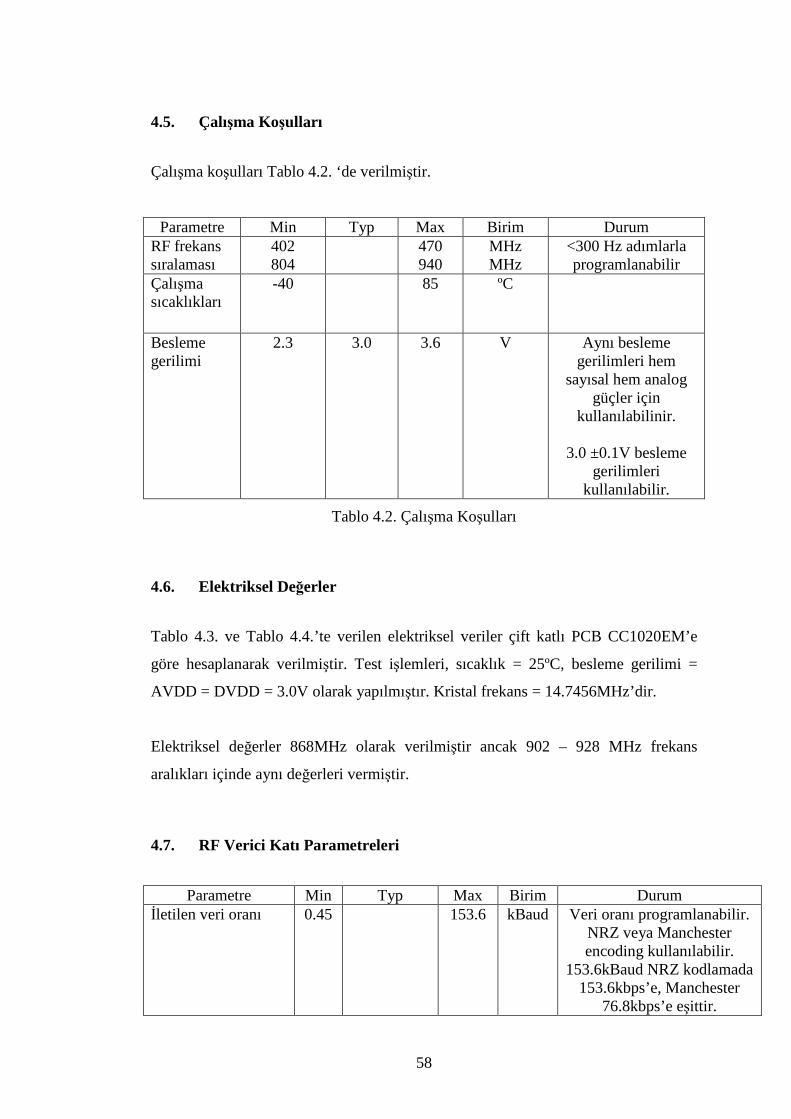
58
4.5. Çalışma Koşulları
Çalışma koşulları Tablo 4.2. ‘de verilmiştir.
Parametre Min Typ Max Birim Durum RF frekans sıralaması
402 804
470 940
MHz MHz
<300 Hz adımlarla programlanabilir
Çalışma sıcaklıkları
-40 85 ºC
Besleme gerilimi
2.3 3.0 3.6 V Aynı besleme gerilimleri hem
sayısal hem analog güçler için
kullanılabilinir.
3.0 ±0.1V besleme gerilimleri
kullanılabilir.
Tablo 4.2. Çalışma Koşulları
4.6. Elektriksel Değerler
Tablo 4.3. ve Tablo 4.4.’te verilen elektriksel veriler çift katlı PCB CC1020EM’e
göre hesaplanarak verilmiştir. Test işlemleri, sıcaklık = 25ºC, besleme gerilimi =
AVDD = DVDD = 3.0V olarak yapılmıştır. Kristal frekans = 14.7456MHz’dir.
Elektriksel değerler 868MHz olarak verilmiştir ancak 902 – 928 MHz frekans
aralıkları içinde aynı değerleri vermiştir.
4.7. RF Verici Katı Parametreleri
Parametre Min Typ Max Birim Durum Đletilen veri oranı 0.45 153.6 kBaud Veri oranı programlanabilir.
NRZ veya Manchester encoding kullanılabilir.
153.6kBaud NRZ kodlamada 153.6kbps’e, Manchester
76.8kbps’e eşittir.
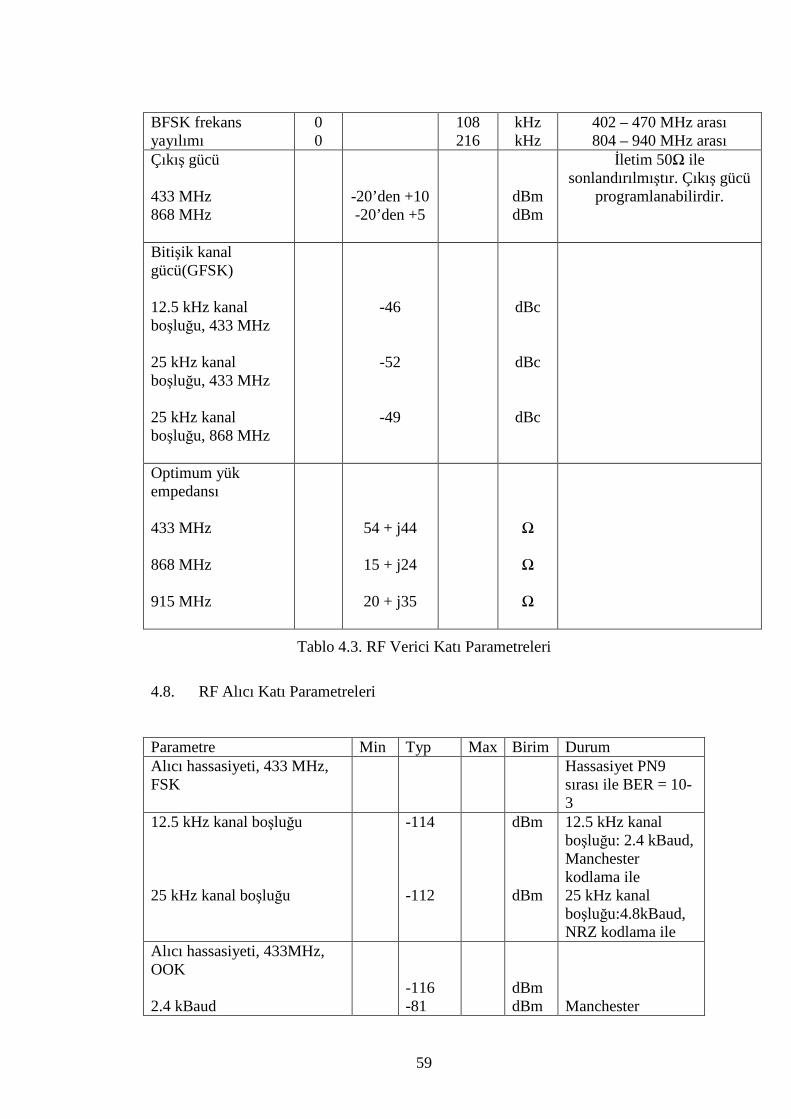
59
BFSK frekans yayılımı
0 0
108 216
kHz kHz
402 – 470 MHz arası 804 – 940 MHz arası
Çıkış gücü 433 MHz 868 MHz
-20’den +10 -20’den +5
dBm dBm
Đletim 50Ω ile sonlandırılmıştır. Çıkış gücü
programlanabilirdir.
Bitişik kanal gücü(GFSK) 12.5 kHz kanal boşluğu, 433 MHz 25 kHz kanal boşluğu, 433 MHz 25 kHz kanal boşluğu, 868 MHz
-46
-52
-49
dBc
dBc
dBc
Optimum yük empedansı 433 MHz 868 MHz 915 MHz
54 + j44
15 + j24
20 + j35
Ω Ω Ω
Tablo 4.3. RF Verici Katı Parametreleri
4.8. RF Alıcı Katı Parametreleri
Parametre Min Typ Max Birim Durum Alıcı hassasiyeti, 433 MHz, FSK
Hassasiyet PN9 sırası ile BER = 10-3
12.5 kHz kanal boşluğu 25 kHz kanal boşluğu
-114 -112
dBm dBm
12.5 kHz kanal boşluğu: 2.4 kBaud, Manchester kodlama ile 25 kHz kanal boşluğu:4.8kBaud, NRZ kodlama ile
Alıcı hassasiyeti, 433MHz, OOK 2.4 kBaud
-116 -81
dBm dBm
Manchester
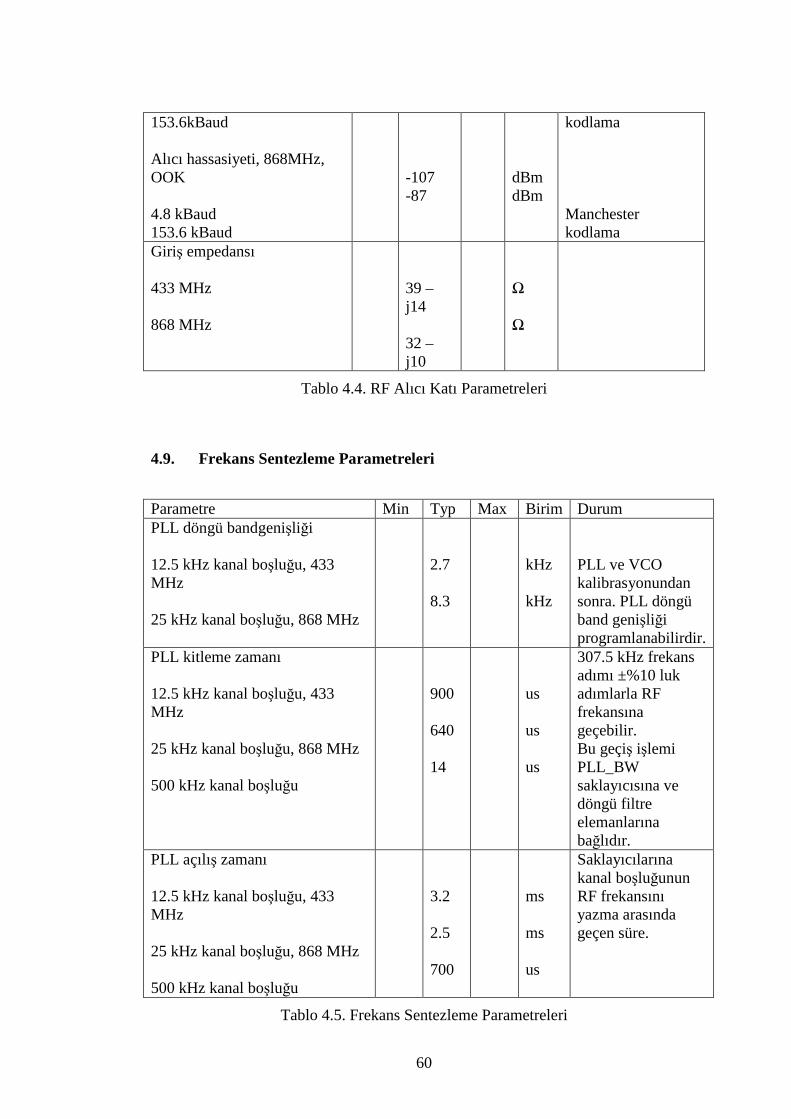
60
153.6kBaud Alıcı hassasiyeti, 868MHz, OOK 4.8 kBaud 153.6 kBaud
-107 -87
dBm dBm
kodlama Manchester kodlama
Giriş empedansı 433 MHz 868 MHz
39 – j14 32 – j10
Ω Ω
Tablo 4.4. RF Alıcı Katı Parametreleri
4.9. Frekans Sentezleme Parametreleri
Parametre Min Typ Max Birim Durum PLL döngü bandgenişliği 12.5 kHz kanal boşluğu, 433 MHz 25 kHz kanal boşluğu, 868 MHz
2.7 8.3
kHz kHz
PLL ve VCO kalibrasyonundan sonra. PLL döngü band genişliği programlanabilirdir.
PLL kitleme zamanı 12.5 kHz kanal boşluğu, 433 MHz 25 kHz kanal boşluğu, 868 MHz 500 kHz kanal boşluğu
900 640 14
us us us
307.5 kHz frekans adımı ±%10 luk adımlarla RF frekansına geçebilir. Bu geçiş işlemi PLL_BW saklayıcısına ve döngü filtre elemanlarına bağlıdır.
PLL açılış zamanı 12.5 kHz kanal boşluğu, 433 MHz 25 kHz kanal boşluğu, 868 MHz 500 kHz kanal boşluğu
3.2 2.5 700
ms ms us
Saklayıcılarına kanal boşluğunun RF frekansını yazma arasında geçen süre.
Tablo 4.5. Frekans Sentezleme Parametreleri
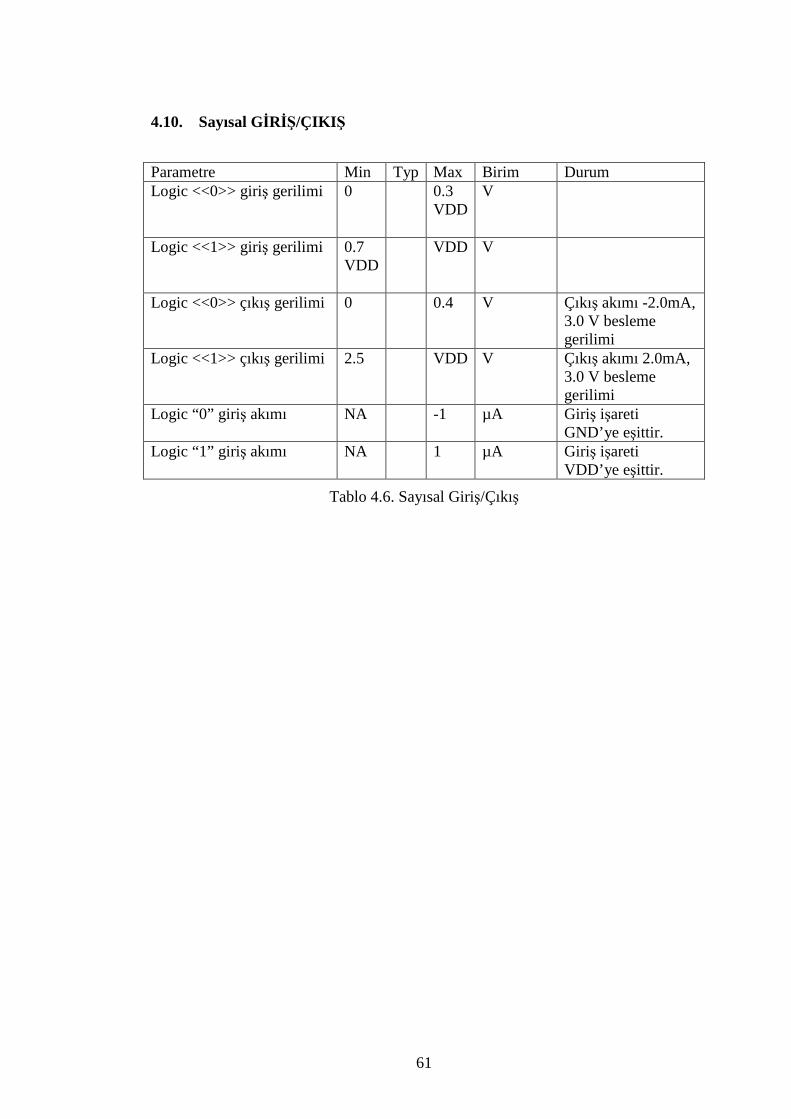
61
4.10. Sayısal GĐRĐŞ/ÇIKI Ş
Parametre Min Typ Max Birim Durum Logic <<0>> giriş gerilimi
0 0.3 VDD
V
Logic <<1>> giriş gerilimi
0.7 VDD
VDD V
Logic <<0>> çıkış gerilimi
0 0.4 V Çıkış akımı -2.0mA, 3.0 V besleme gerilimi
Logic <<1>> çıkış gerilimi
2.5 VDD V Çıkış akımı 2.0mA, 3.0 V besleme gerilimi
Logic “0” giriş akımı
NA -1 µA Giriş işareti GND’ye eşittir.
Logic “1” giriş akımı
NA 1 µA Giriş işareti VDD’ye eşittir.
Tablo 4.6. Sayısal Giriş/Çıkış
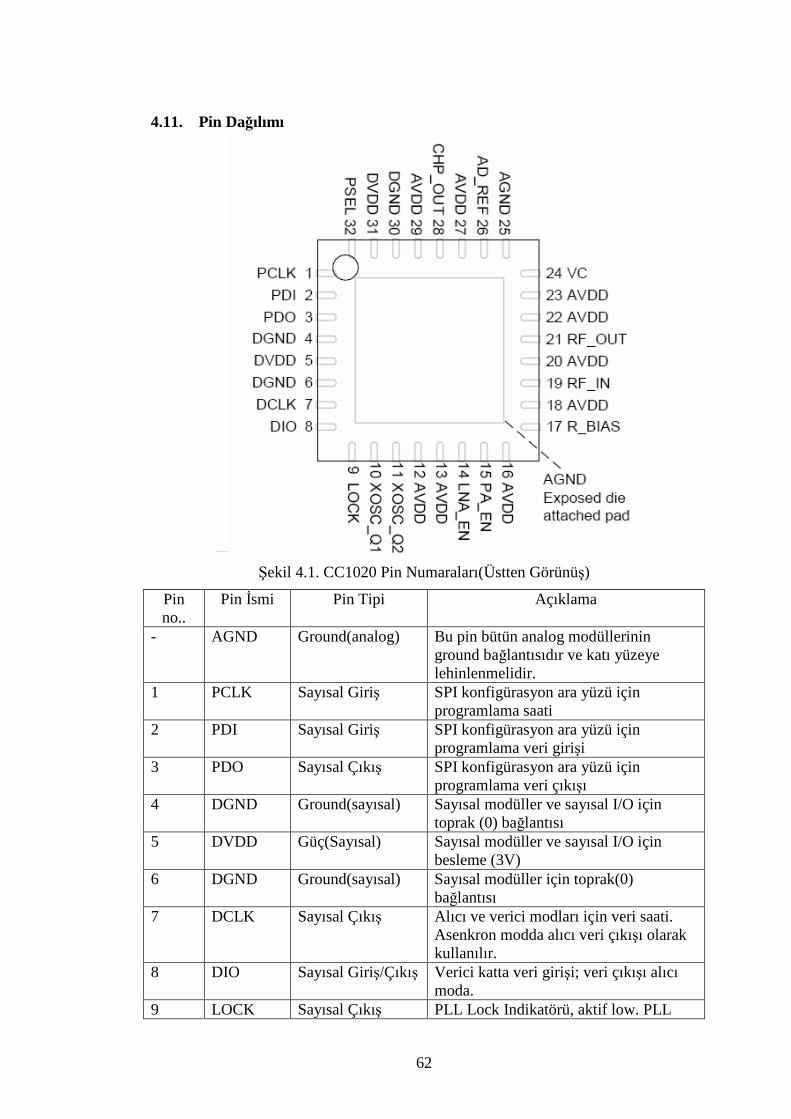
62
4.11. Pin Dağılımı
Şekil 4.1. CC1020 Pin Numaraları(Üstten Görünüş)
Pin no..
Pin Đsmi Pin Tipi Açıklama
- AGND Ground(analog) Bu pin bütün analog modüllerinin ground bağlantısıdır ve katı yüzeye lehinlenmelidir.
1 PCLK Sayısal Giriş SPI konfigürasyon ara yüzü için programlama saati
2 PDI Sayısal Giriş SPI konfigürasyon ara yüzü için programlama veri girişi
3 PDO Sayısal Çıkış SPI konfigürasyon ara yüzü için programlama veri çıkışı
4 DGND Ground(sayısal) Sayısal modüller ve sayısal I/O için toprak (0) bağlantısı
5 DVDD Güç(Sayısal) Sayısal modüller ve sayısal I/O için besleme (3V)
6 DGND Ground(sayısal) Sayısal modüller için toprak(0) bağlantısı
7 DCLK Sayısal Çıkış Alıcı ve verici modları için veri saati. Asenkron modda alıcı veri çıkışı olarak kullanılır.
8 DIO Sayısal Giriş/Çıkış Verici katta veri girişi; veri çıkışı alıcı moda.
9 LOCK Sayısal Çıkış PLL Lock Indikatörü, aktif low. PLL
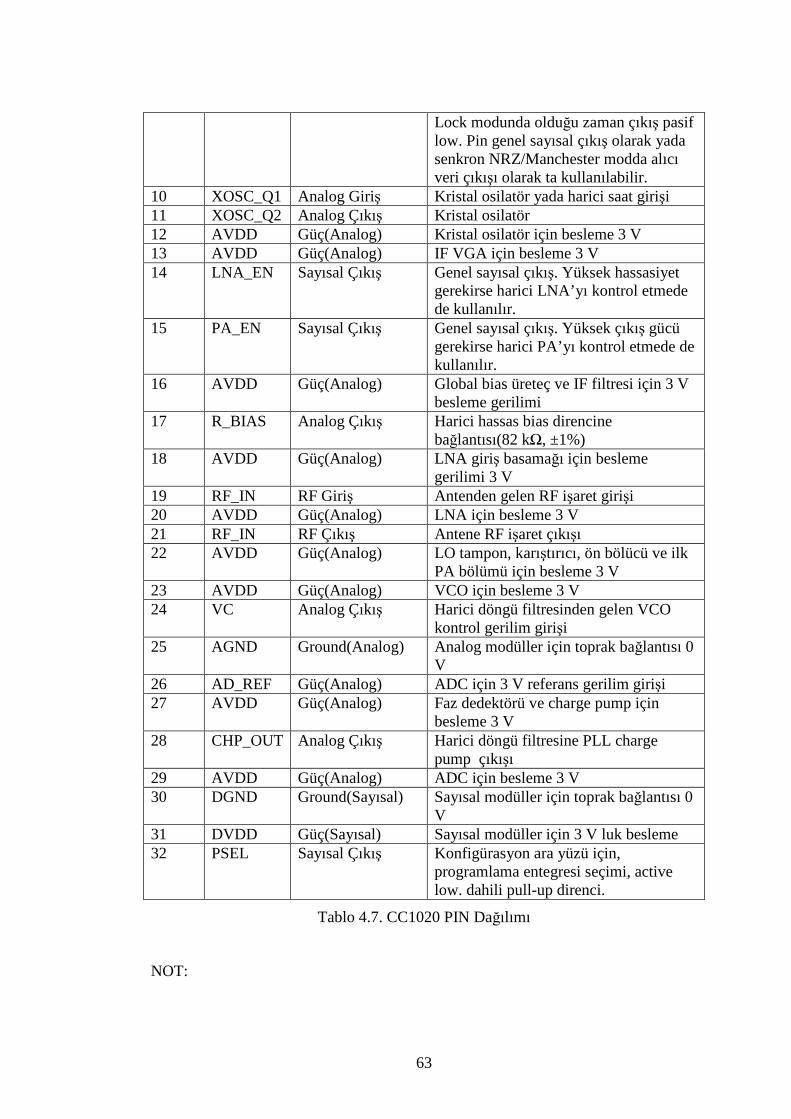
63
Lock modunda olduğu zaman çıkış pasif low. Pin genel sayısal çıkış olarak yada senkron NRZ/Manchester modda alıcı veri çıkışı olarak ta kullanılabilir.
10 XOSC_Q1 Analog Giriş Kristal osilatör yada harici saat girişi 11 XOSC_Q2 Analog Çıkış Kristal osilatör 12 AVDD Güç(Analog) Kristal osilatör için besleme 3 V 13 AVDD Güç(Analog) IF VGA için besleme 3 V 14 LNA_EN Sayısal Çıkış Genel sayısal çıkış. Yüksek hassasiyet
gerekirse harici LNA’yı kontrol etmede de kullanılır.
15 PA_EN Sayısal Çıkış Genel sayısal çıkış. Yüksek çıkış gücü gerekirse harici PA’yı kontrol etmede de kullanılır.
16 AVDD Güç(Analog) Global bias üreteç ve IF filtresi için 3 V besleme gerilimi
17 R_BIAS Analog Çıkış Harici hassas bias direncine bağlantısı(82 kΩ, ±1%)
18 AVDD Güç(Analog) LNA giriş basamağı için besleme gerilimi 3 V
19 RF_IN RF Giriş Antenden gelen RF işaret girişi 20 AVDD Güç(Analog) LNA için besleme 3 V 21 RF_IN RF Çıkış Antene RF işaret çıkışı 22 AVDD Güç(Analog) LO tampon, karıştırıcı, ön bölücü ve ilk
PA bölümü için besleme 3 V 23 AVDD Güç(Analog) VCO için besleme 3 V 24 VC Analog Çıkış Harici döngü filtresinden gelen VCO
kontrol gerilim girişi 25 AGND Ground(Analog) Analog modüller için toprak bağlantısı 0
V 26 AD_REF Güç(Analog) ADC için 3 V referans gerilim girişi 27 AVDD Güç(Analog) Faz dedektörü ve charge pump için
besleme 3 V 28 CHP_OUT Analog Çıkış Harici döngü filtresine PLL charge
pump çıkışı 29 AVDD Güç(Analog) ADC için besleme 3 V 30 DGND Ground(Sayısal) Sayısal modüller için toprak bağlantısı 0
V 31 DVDD Güç(Sayısal) Sayısal modüller için 3 V luk besleme 32 PSEL Sayısal Çıkış Konfigürasyon ara yüzü için,
programlama entegresi seçimi, active low. dahili pull-up direnci.
Tablo 4.7. CC1020 PIN Dağılımı
NOT:
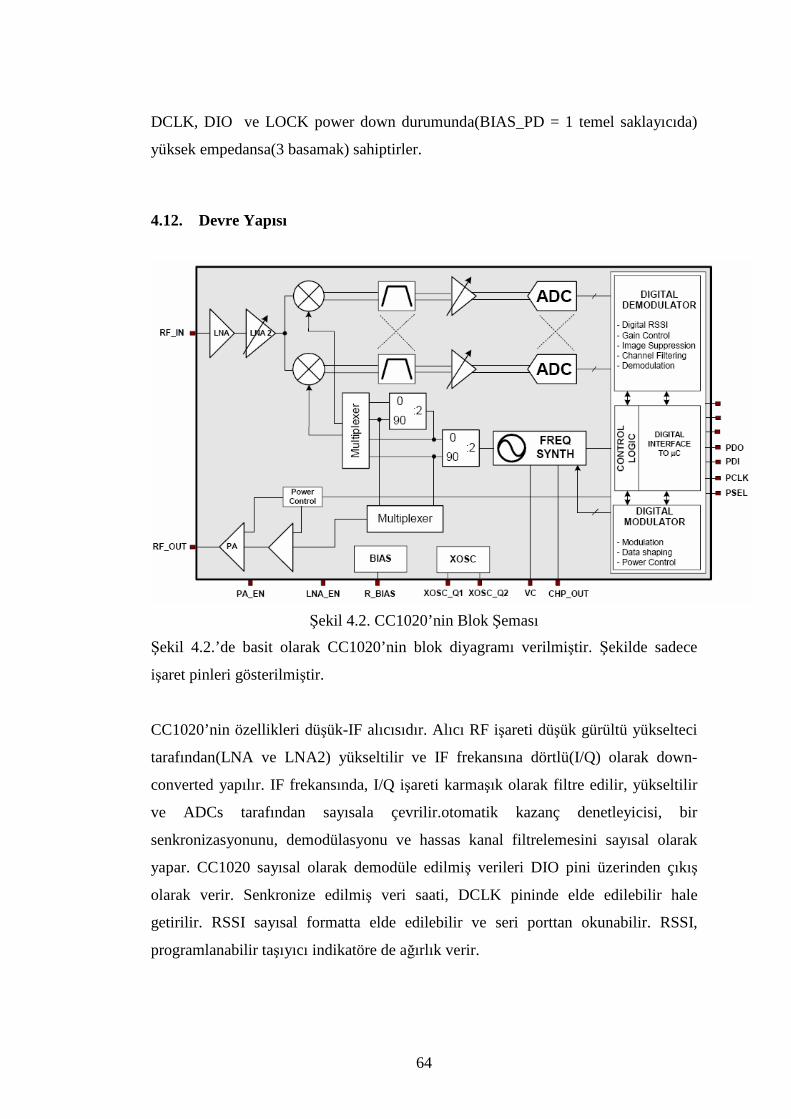
64
DCLK, DIO ve LOCK power down durumunda(BIAS_PD = 1 temel saklayıcıda)
yüksek empedansa(3 basamak) sahiptirler.
4.12. Devre Yapısı
Şekil 4.2. CC1020’nin Blok Şeması
Şekil 4.2.’de basit olarak CC1020’nin blok diyagramı verilmiştir. Şekilde sadece
işaret pinleri gösterilmiştir.
CC1020’nin özellikleri düşük-IF alıcısıdır. Alıcı RF işareti düşük gürültü yükselteci
tarafından(LNA ve LNA2) yükseltilir ve IF frekansına dörtlü(I/Q) olarak down-
converted yapılır. IF frekansında, I/Q işareti karmaşık olarak filtre edilir, yükseltilir
ve ADCs tarafından sayısala çevrilir.otomatik kazanç denetleyicisi, bir
senkronizasyonunu, demodülasyonu ve hassas kanal filtrelemesini sayısal olarak
yapar. CC1020 sayısal olarak demodüle edilmiş verileri DIO pini üzerinden çıkış
olarak verir. Senkronize edilmiş veri saati, DCLK pininde elde edilebilir hale
getirilir. RSSI sayısal formatta elde edilebilir ve seri porttan okunabilir. RSSI,
programlanabilir taşıyıcı indikatöre de ağırlık verir.
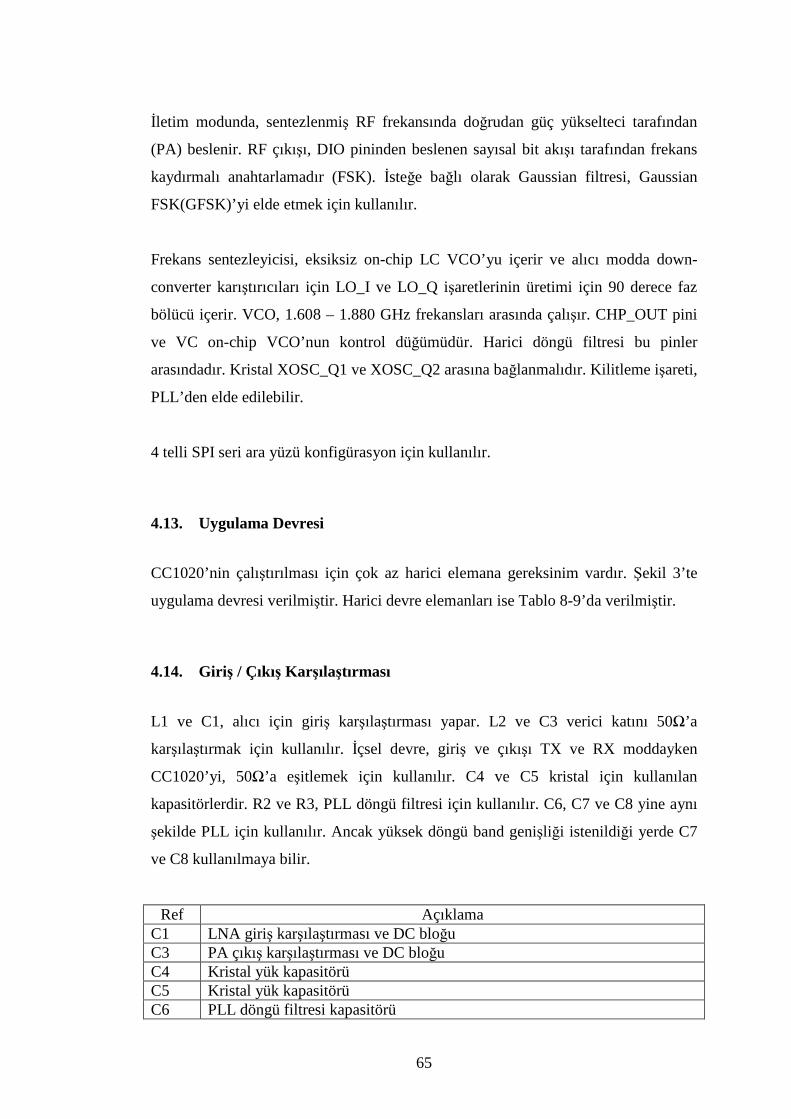
65
Đletim modunda, sentezlenmiş RF frekansında doğrudan güç yükselteci tarafından
(PA) beslenir. RF çıkışı, DIO pininden beslenen sayısal bit akışı tarafından frekans
kaydırmalı anahtarlamadır (FSK). Đsteğe bağlı olarak Gaussian filtresi, Gaussian
FSK(GFSK)’yi elde etmek için kullanılır.
Frekans sentezleyicisi, eksiksiz on-chip LC VCO’yu içerir ve alıcı modda down-
converter karıştırıcıları için LO_I ve LO_Q işaretlerinin üretimi için 90 derece faz
bölücü içerir. VCO, 1.608 – 1.880 GHz frekansları arasında çalışır. CHP_OUT pini
ve VC on-chip VCO’nun kontrol düğümüdür. Harici döngü filtresi bu pinler
arasındadır. Kristal XOSC_Q1 ve XOSC_Q2 arasına bağlanmalıdır. Kilitleme işareti,
PLL’den elde edilebilir.
4 telli SPI seri ara yüzü konfigürasyon için kullanılır.
4.13. Uygulama Devresi
CC1020’nin çalıştırılması için çok az harici elemana gereksinim vardır. Şekil 3’te
uygulama devresi verilmiştir. Harici devre elemanları ise Tablo 8-9’da verilmiştir.
4.14. Giri ş / Çıkış Kar şılaştırması
L1 ve C1, alıcı için giriş karşılaştırması yapar. L2 ve C3 verici katını 50Ω’a
karşılaştırmak için kullanılır. Đçsel devre, giriş ve çıkışı TX ve RX moddayken
CC1020’yi, 50Ω’a eşitlemek için kullanılır. C4 ve C5 kristal için kullanılan
kapasitörlerdir. R2 ve R3, PLL döngü filtresi için kullanılır. C6, C7 ve C8 yine aynı
şekilde PLL için kullanılır. Ancak yüksek döngü band genişliği istenildiği yerde C7
ve C8 kullanılmaya bilir.
Ref Açıklama C1 LNA giriş karşılaştırması ve DC bloğu C3 PA çıkış karşılaştırması ve DC bloğu C4 Kristal yük kapasitörü C5 Kristal yük kapasitörü C6 PLL döngü filtresi kapasitörü
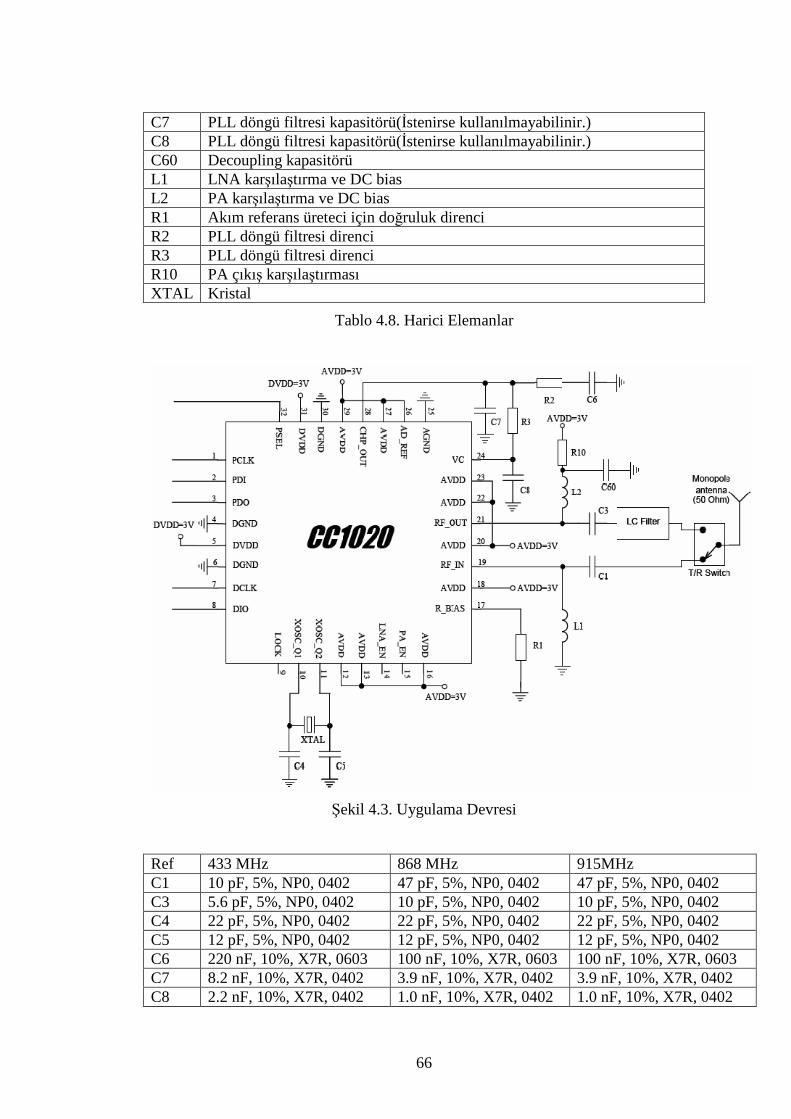
66
C7 PLL döngü filtresi kapasitörü(Đstenirse kullanılmayabilinir.) C8 PLL döngü filtresi kapasitörü(Đstenirse kullanılmayabilinir.) C60 Decoupling kapasitörü L1 LNA karşılaştırma ve DC bias L2 PA karşılaştırma ve DC bias R1 Akım referans üreteci için doğruluk direnci R2 PLL döngü filtresi direnci R3 PLL döngü filtresi direnci R10 PA çıkış karşılaştırması XTAL Kristal
Tablo 4.8. Harici Elemanlar
Şekil 4.3. Uygulama Devresi
Ref 433 MHz 868 MHz 915MHz C1 10 pF, 5%, NP0, 0402 47 pF, 5%, NP0, 0402 47 pF, 5%, NP0, 0402 C3 5.6 pF, 5%, NP0, 0402 10 pF, 5%, NP0, 0402 10 pF, 5%, NP0, 0402 C4 22 pF, 5%, NP0, 0402 22 pF, 5%, NP0, 0402 22 pF, 5%, NP0, 0402 C5 12 pF, 5%, NP0, 0402 12 pF, 5%, NP0, 0402 12 pF, 5%, NP0, 0402 C6 220 nF, 10%, X7R, 0603 100 nF, 10%, X7R, 0603 100 nF, 10%, X7R, 0603 C7 8.2 nF, 10%, X7R, 0402 3.9 nF, 10%, X7R, 0402 3.9 nF, 10%, X7R, 0402 C8 2.2 nF, 10%, X7R, 0402 1.0 nF, 10%, X7R, 0402 1.0 nF, 10%, X7R, 0402
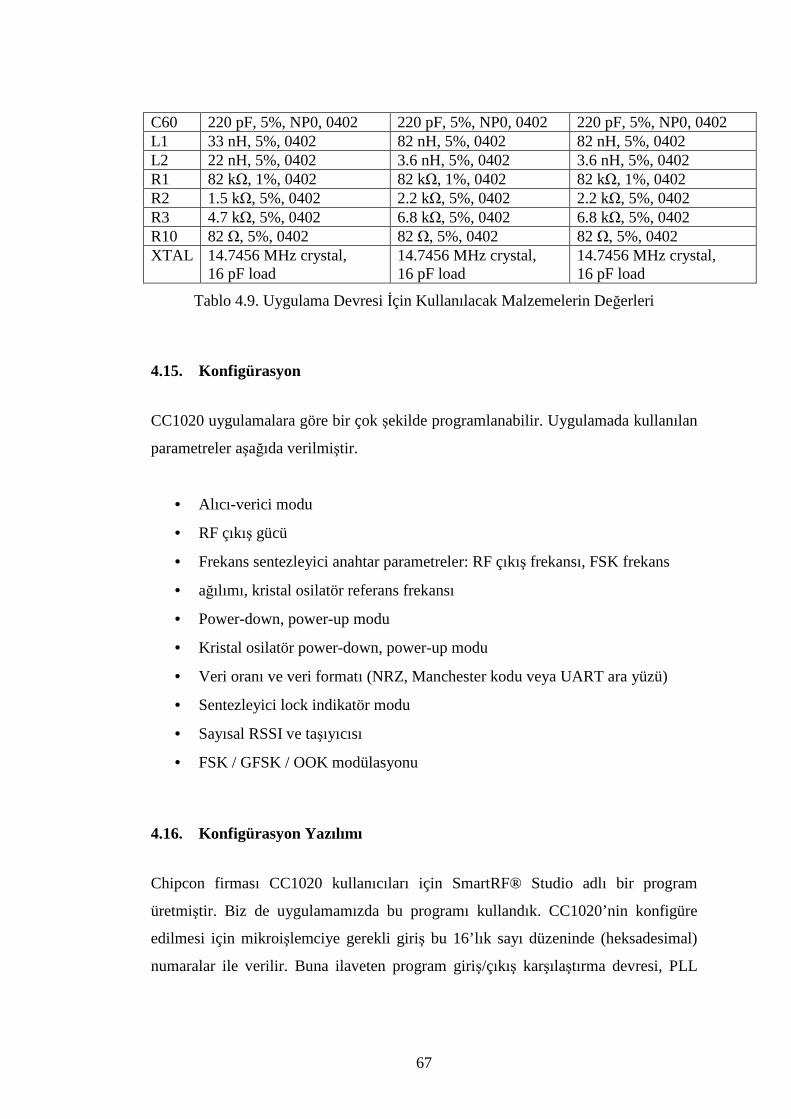
67
C60 220 pF, 5%, NP0, 0402 220 pF, 5%, NP0, 0402 220 pF, 5%, NP0, 0402 L1 33 nH, 5%, 0402 82 nH, 5%, 0402 82 nH, 5%, 0402 L2 22 nH, 5%, 0402 3.6 nH, 5%, 0402 3.6 nH, 5%, 0402 R1 82 kΩ, 1%, 0402 82 kΩ, 1%, 0402 82 kΩ, 1%, 0402 R2 1.5 kΩ, 5%, 0402 2.2 kΩ, 5%, 0402 2.2 kΩ, 5%, 0402 R3 4.7 kΩ, 5%, 0402 6.8 kΩ, 5%, 0402 6.8 kΩ, 5%, 0402 R10 82 Ω, 5%, 0402 82 Ω, 5%, 0402 82 Ω, 5%, 0402 XTAL 14.7456 MHz crystal,
16 pF load 14.7456 MHz crystal, 16 pF load
14.7456 MHz crystal, 16 pF load
Tablo 4.9. Uygulama Devresi Đçin Kullanılacak Malzemelerin Değerleri
4.15. Konfigürasyon
CC1020 uygulamalara göre bir çok şekilde programlanabilir. Uygulamada kullanılan
parametreler aşağıda verilmiştir.
• Alıcı-verici modu
• RF çıkış gücü
• Frekans sentezleyici anahtar parametreler: RF çıkış frekansı, FSK frekans
• ağılımı, kristal osilatör referans frekansı
• Power-down, power-up modu
• Kristal osilatör power-down, power-up modu
• Veri oranı ve veri formatı (NRZ, Manchester kodu veya UART ara yüzü)
• Sentezleyici lock indikatör modu
• Sayısal RSSI ve taşıyıcısı
• FSK / GFSK / OOK modülasyonu
4.16. Konfigürasyon Yazılımı
Chipcon firması CC1020 kullanıcıları için SmartRF® Studio adlı bir program
üretmiştir. Biz de uygulamamızda bu programı kullandık. CC1020’nin konfigüre
edilmesi için mikroişlemciye gerekli giriş bu 16’lık sayı düzeninde (heksadesimal)
numaralar ile verilir. Buna ilaveten program giriş/çıkış karşılaştırma devresi, PLL
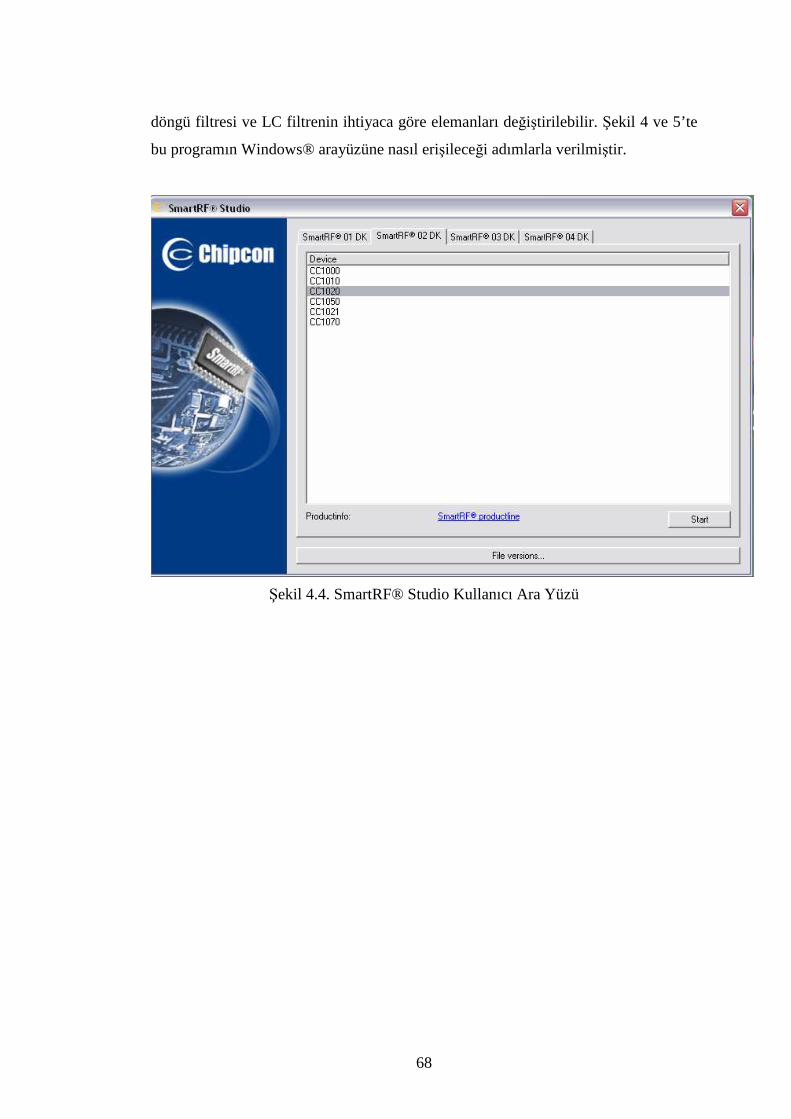
68
döngü filtresi ve LC filtrenin ihtiyaca göre elemanları değiştirilebilir. Şekil 4 ve 5’te
bu programın Windows® arayüzüne nasıl erişileceği adımlarla verilmiştir.
Şekil 4.4. SmartRF® Studio Kullanıcı Ara Yüzü
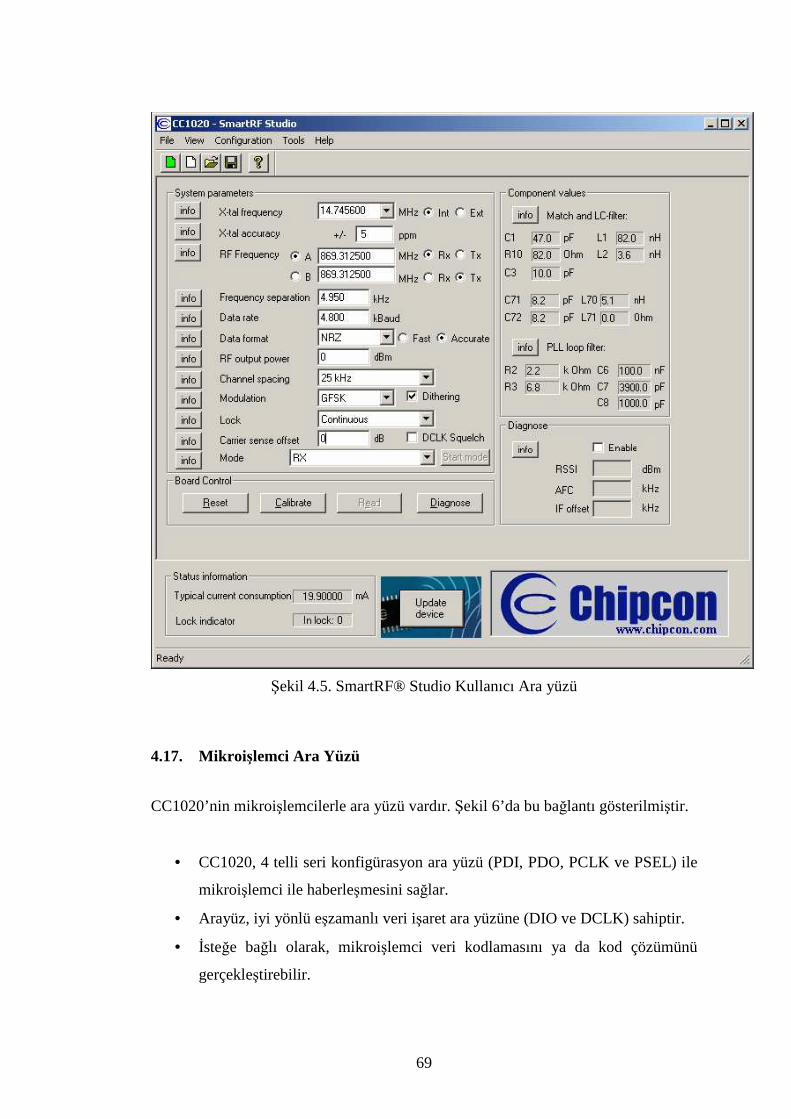
69
Şekil 4.5. SmartRF® Studio Kullanıcı Ara yüzü
4.17. Mikroi şlemci Ara Yüzü
CC1020’nin mikroişlemcilerle ara yüzü vardır. Şekil 6’da bu bağlantı gösterilmiştir.
• CC1020, 4 telli seri konfigürasyon ara yüzü (PDI, PDO, PCLK ve PSEL) ile
mikroişlemci ile haberleşmesini sağlar.
• Arayüz, iyi yönlü eşzamanlı veri işaret ara yüzüne (DIO ve DCLK) sahiptir.
• Đsteğe bağlı olarak, mikroişlemci veri kodlamasını ya da kod çözümünü
gerçekleştirebilir.
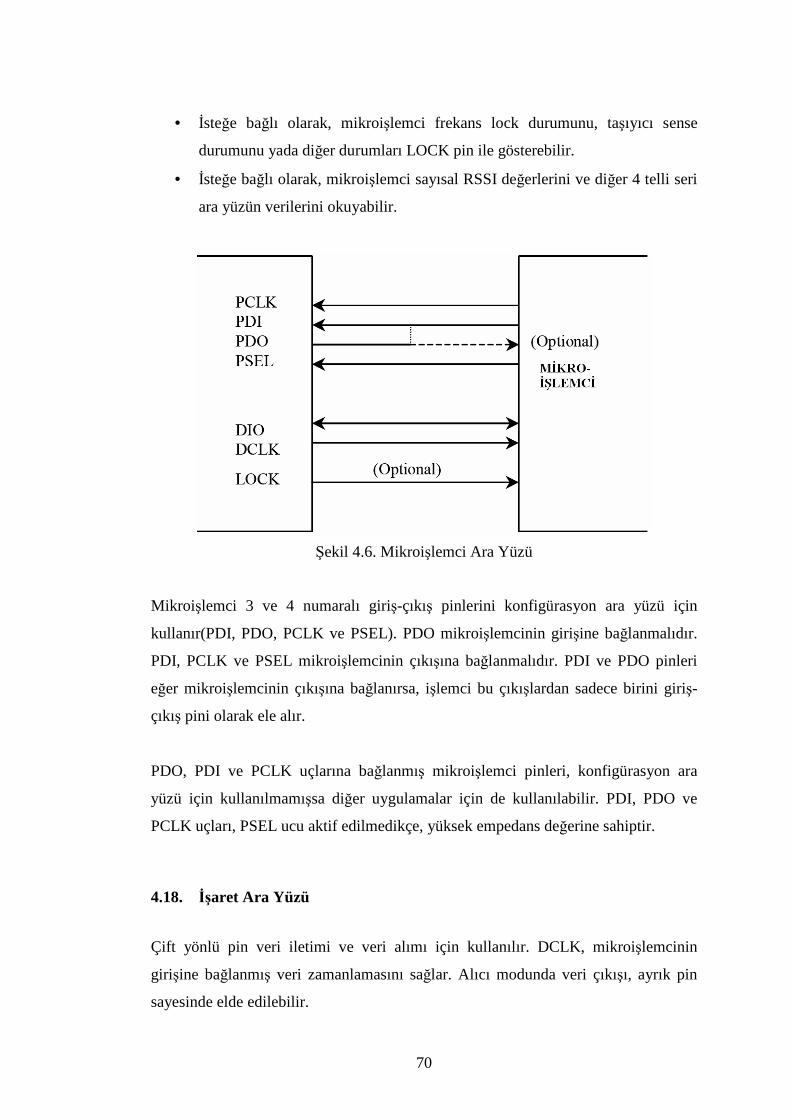
70
• Đsteğe bağlı olarak, mikroişlemci frekans lock durumunu, taşıyıcı sense
durumunu yada diğer durumları LOCK pin ile gösterebilir.
• Đsteğe bağlı olarak, mikroişlemci sayısal RSSI değerlerini ve diğer 4 telli seri
ara yüzün verilerini okuyabilir.
Şekil 4.6. Mikroişlemci Ara Yüzü
Mikroişlemci 3 ve 4 numaralı giriş-çıkış pinlerini konfigürasyon ara yüzü için
kullanır(PDI, PDO, PCLK ve PSEL). PDO mikroişlemcinin girişine bağlanmalıdır.
PDI, PCLK ve PSEL mikroişlemcinin çıkışına bağlanmalıdır. PDI ve PDO pinleri
eğer mikroişlemcinin çıkışına bağlanırsa, işlemci bu çıkışlardan sadece birini giriş-
çıkış pini olarak ele alır.
PDO, PDI ve PCLK uçlarına bağlanmış mikroişlemci pinleri, konfigürasyon ara
yüzü için kullanılmamışsa diğer uygulamalar için de kullanılabilir. PDI, PDO ve
PCLK uçları, PSEL ucu aktif edilmedikçe, yüksek empedans değerine sahiptir.
4.18. Đşaret Ara Yüzü
Çift yönlü pin veri iletimi ve veri alımı için kullanılır. DCLK, mikroişlemcinin
girişine bağlanmış veri zamanlamasını sağlar. Alıcı modunda veri çıkışı, ayrık pin
sayesinde elde edilebilir.
71
4.19. PLL Kitleme Đşareti
Đsteğe bağlı olarak, bir mikroişlemci pini kitleme işaretini göstermek için kullanılır.
Bu işaret, PLL kilitli olduğu zaman, lojik olarak low seviyededir. Diğer bir kullanım
yeri de, diğer içsel test işaretlerini göstermede kullanılır.
4.20. 4 Telli Seri Konfigürasyon Ara Yüzü
CC1020 slave modda iken, entegre 4 telli SPI ara yüzü ile (SPI PDI, PDO, PCLK ve
PSEL) konfigüre edilebilir. 8 bit konfigüre edilebilir saklayıcı vardır ve bu
saklayıcıların her birinin 7 bitlik bir adresi vardır. CC1020’yi tamamen konfigüre
edebilmek için, 33 veri çerçeve gönderilmelidir ve bu her bir çerçeve içerisinde 16
bittir(7 adres biti, 8 veri biti ve R/W biti). PCLK frekansına, bütün konfigürasyonu
gerçekleştirmek için ihtiyaç vardır ve zamanlama değeri bundan alınır. PCLK
frekansı sayesinde 10MHz’lik bir işaret alınır ve konfigürasyonun tamamı 53µs’den
daha az bir zamanda sonlandırılır. Bütün saklayıcılar okunabilirdir.
Her bir yazma döngüsü boyunca, PDI hat üzerinden 16 bit gönderilir. Her bir veri
çerçeve için yedisi en anlamlı bitlerdir ve bu bitler adres bitleridir(A6:0). A6 adresin
en anlamlı bitidir(MSB) ve e bu ilk bit olarak gönderilir. Bir sonraki bit ise R/W
bitidir(yazma için high, okuma için low). 8 veri biti bu R/W bitinden sonra
iletilir(D7:0). Adres ve veri iletimi süresince PSEL(Program Select) low tutulmalıdır.
Programlama için zamanlama değerleri Şekil 18, Şekil 19 ve Tablo 9’da
gösterilmiştir.
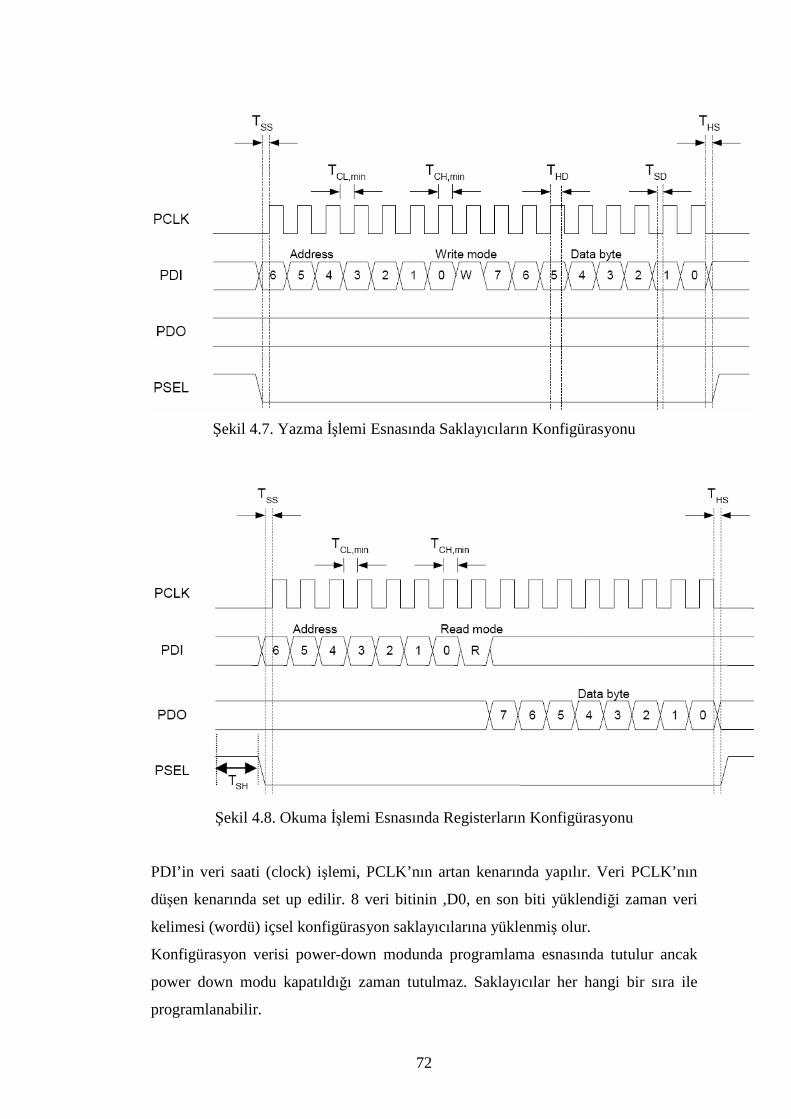
72
Şekil 4.7. Yazma Đşlemi Esnasında Saklayıcıların Konfigürasyonu
Şekil 4.8. Okuma Đşlemi Esnasında Registerların Konfigürasyonu
PDI’in veri saati (clock) işlemi, PCLK’nın artan kenarında yapılır. Veri PCLK’nın
düşen kenarında set up edilir. 8 veri bitinin ,D0, en son biti yüklendiği zaman veri
kelimesi (wordü) içsel konfigürasyon saklayıcılarına yüklenmiş olur.
Konfigürasyon verisi power-down modunda programlama esnasında tutulur ancak
power down modu kapatıldığı zaman tutulmaz. Saklayıcılar her hangi bir sıra ile
programlanabilir.
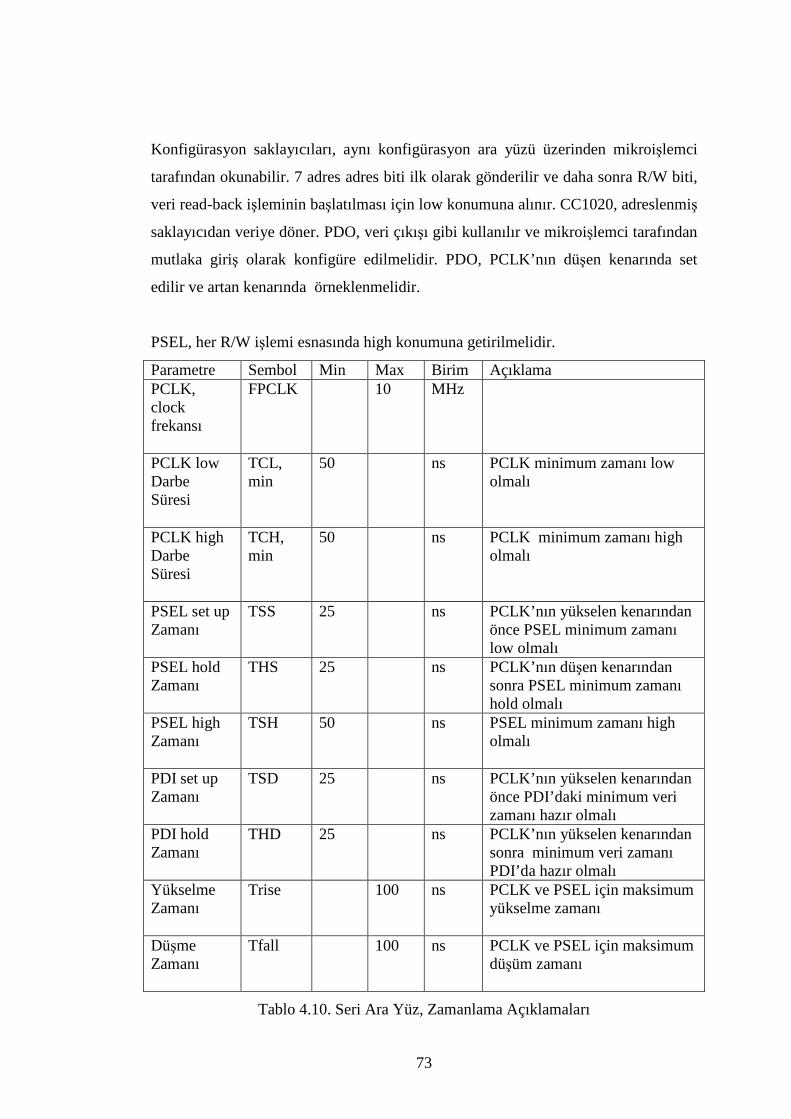
73
Konfigürasyon saklayıcıları, aynı konfigürasyon ara yüzü üzerinden mikroişlemci
tarafından okunabilir. 7 adres adres biti ilk olarak gönderilir ve daha sonra R/W biti,
veri read-back işleminin başlatılması için low konumuna alınır. CC1020, adreslenmiş
saklayıcıdan veriye döner. PDO, veri çıkışı gibi kullanılır ve mikroişlemci tarafından
mutlaka giriş olarak konfigüre edilmelidir. PDO, PCLK’nın düşen kenarında set
edilir ve artan kenarında örneklenmelidir.
PSEL, her R/W işlemi esnasında high konumuna getirilmelidir.
Parametre Sembol Min Max Birim Açıklama PCLK, clock frekansı
FPCLK 10 MHz
PCLK low Darbe Süresi
TCL, min
50 ns PCLK minimum zamanı low olmalı
PCLK high Darbe Süresi
TCH, min
50 ns PCLK minimum zamanı high olmalı
PSEL set up Zamanı
TSS 25 ns PCLK’nın yükselen kenarından önce PSEL minimum zamanı low olmalı
PSEL hold Zamanı
THS 25 ns PCLK’nın düşen kenarından sonra PSEL minimum zamanı hold olmalı
PSEL high Zamanı
TSH 50 ns PSEL minimum zamanı high olmalı
PDI set up Zamanı
TSD 25 ns PCLK’nın yükselen kenarından önce PDI’daki minimum veri zamanı hazır olmalı
PDI hold Zamanı
THD 25 ns PCLK’nın yükselen kenarından sonra minimum veri zamanı PDI’da hazır olmalı
Yükselme Zamanı
Trise 100 ns PCLK ve PSEL için maksimum yükselme zamanı
Düşme Zamanı
Tfall 100 ns PCLK ve PSEL için maksimum düşüm zamanı
Tablo 4.10. Seri Ara Yüz, Zamanlama Açıklamaları
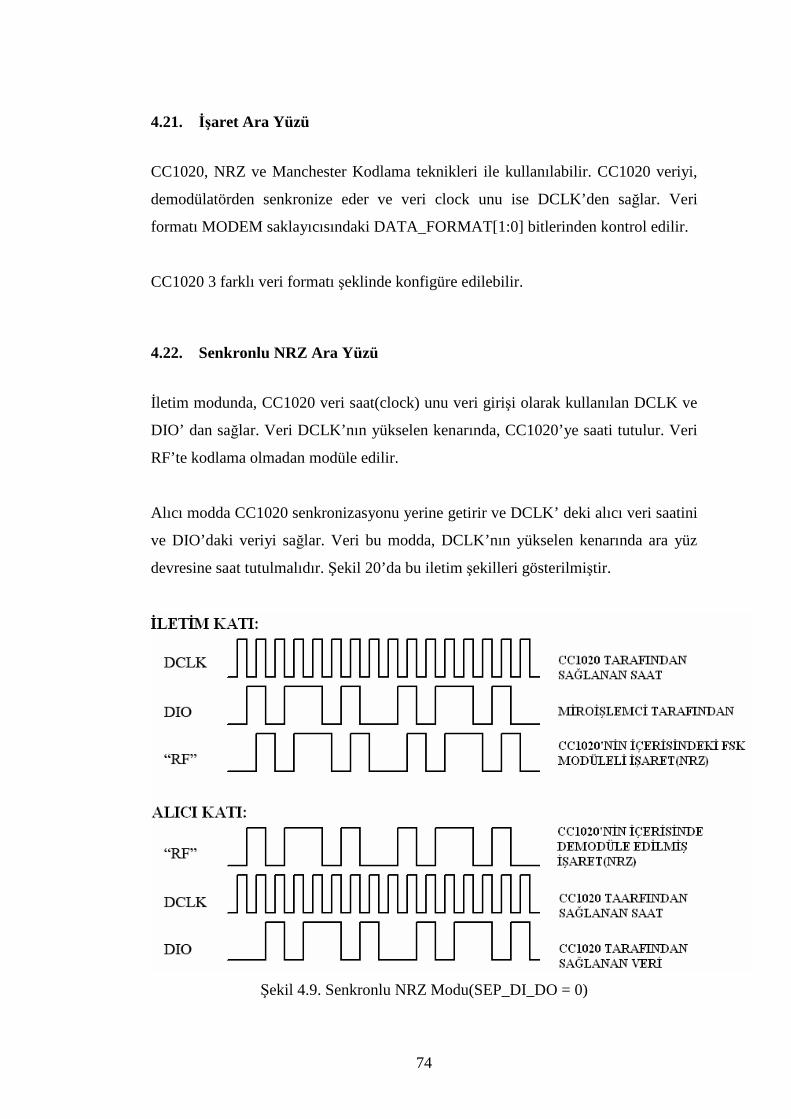
74
4.21. Đşaret Ara Yüzü
CC1020, NRZ ve Manchester Kodlama teknikleri ile kullanılabilir. CC1020 veriyi,
demodülatörden senkronize eder ve veri clock unu ise DCLK’den sağlar. Veri
formatı MODEM saklayıcısındaki DATA_FORMAT[1:0] bitlerinden kontrol edilir.
CC1020 3 farklı veri formatı şeklinde konfigüre edilebilir.
4.22. Senkronlu NRZ Ara Yüzü
Đletim modunda, CC1020 veri saat(clock) unu veri girişi olarak kullanılan DCLK ve
DIO’ dan sağlar. Veri DCLK’nın yükselen kenarında, CC1020’ye saati tutulur. Veri
RF’te kodlama olmadan modüle edilir.
Alıcı modda CC1020 senkronizasyonu yerine getirir ve DCLK’ deki alıcı veri saatini
ve DIO’daki veriyi sağlar. Veri bu modda, DCLK’nın yükselen kenarında ara yüz
devresine saat tutulmalıdır. Şekil 20’da bu iletim şekilleri gösterilmiştir.
Şekil 4.9. Senkronlu NRZ Modu(SEP_DI_DO = 0)
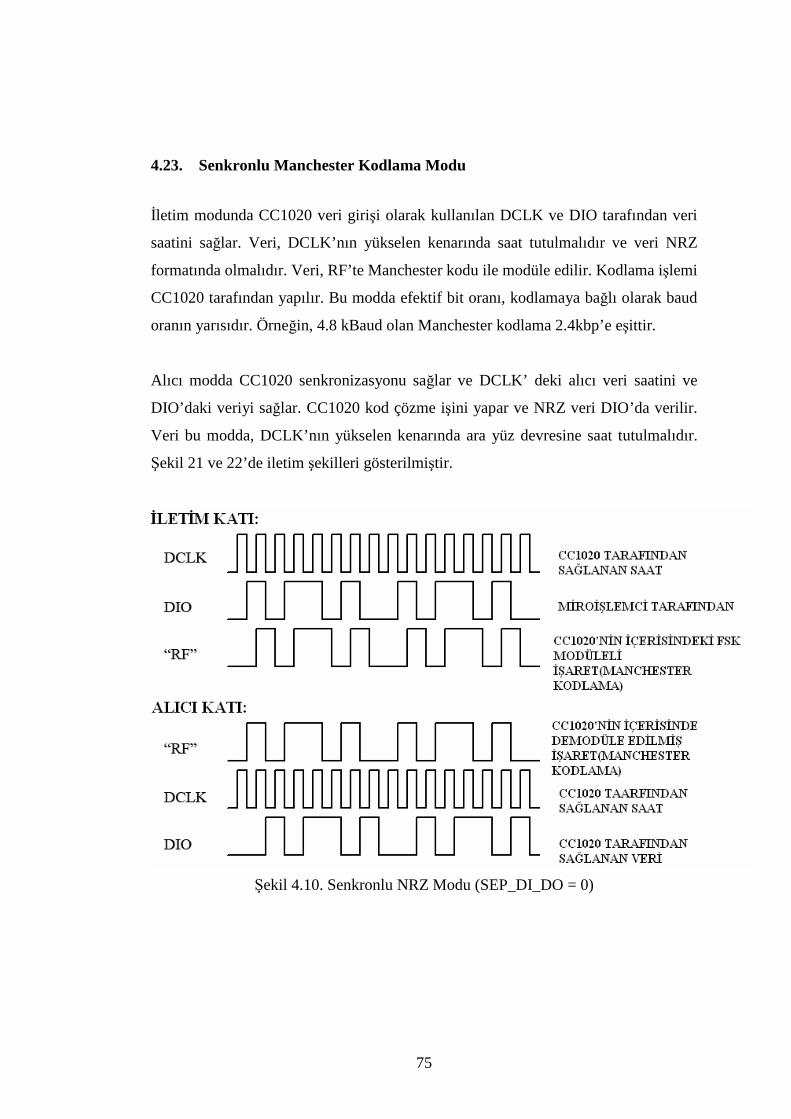
75
4.23. Senkronlu Manchester Kodlama Modu
Đletim modunda CC1020 veri girişi olarak kullanılan DCLK ve DIO tarafından veri
saatini sağlar. Veri, DCLK’nın yükselen kenarında saat tutulmalıdır ve veri NRZ
formatında olmalıdır. Veri, RF’te Manchester kodu ile modüle edilir. Kodlama işlemi
CC1020 tarafından yapılır. Bu modda efektif bit oranı, kodlamaya bağlı olarak baud
oranın yarısıdır. Örneğin, 4.8 kBaud olan Manchester kodlama 2.4kbp’e eşittir.
Alıcı modda CC1020 senkronizasyonu sağlar ve DCLK’ deki alıcı veri saatini ve
DIO’daki veriyi sağlar. CC1020 kod çözme işini yapar ve NRZ veri DIO’da verilir.
Veri bu modda, DCLK’nın yükselen kenarında ara yüz devresine saat tutulmalıdır.
Şekil 21 ve 22’de iletim şekilleri gösterilmiştir.
Şekil 4.10. Senkronlu NRZ Modu (SEP_DI_DO = 0)
76
Şekil 4.11. Manchester Kodlama
4.24. Asenkron UART Modu
Đletim modunda DIO, veri girişi olarak kullanılır. Veri, RF’te senkronizasyon ve
kodlama olmadan modüle edilir.
Alıcı modda, demodülatörden gelen işlenmemiş işaret çıkışa aktarılır(DIO).
CC1020’de işaretin senkronizasyonu ve kodlaması yapılmaz ve bu işlem ara yüz
devresinde yapılır.
Arayüz saklayıcısında SEP_DI_DO = 0 olursa, DIO pini, alıcı modda veri çıkışıdır
ve iletim modunda ise veri girişidir. DCLK pini aktif değildir ve
DATA_FORMAT[0] tarafından low veya high seviyesine çekilebilir.
Arayüz saklayıcısında SEP_DI_DO = 1 olursa, DCLK pini alıcı modda veri çıkışı ve
iletim modunda DIO pini veri girişi olur. TX modunda, DCLK pini aktif değildir ve
DATA_FORMAT[0] tarafından high ve low seviyelerine ayarlanabilir.
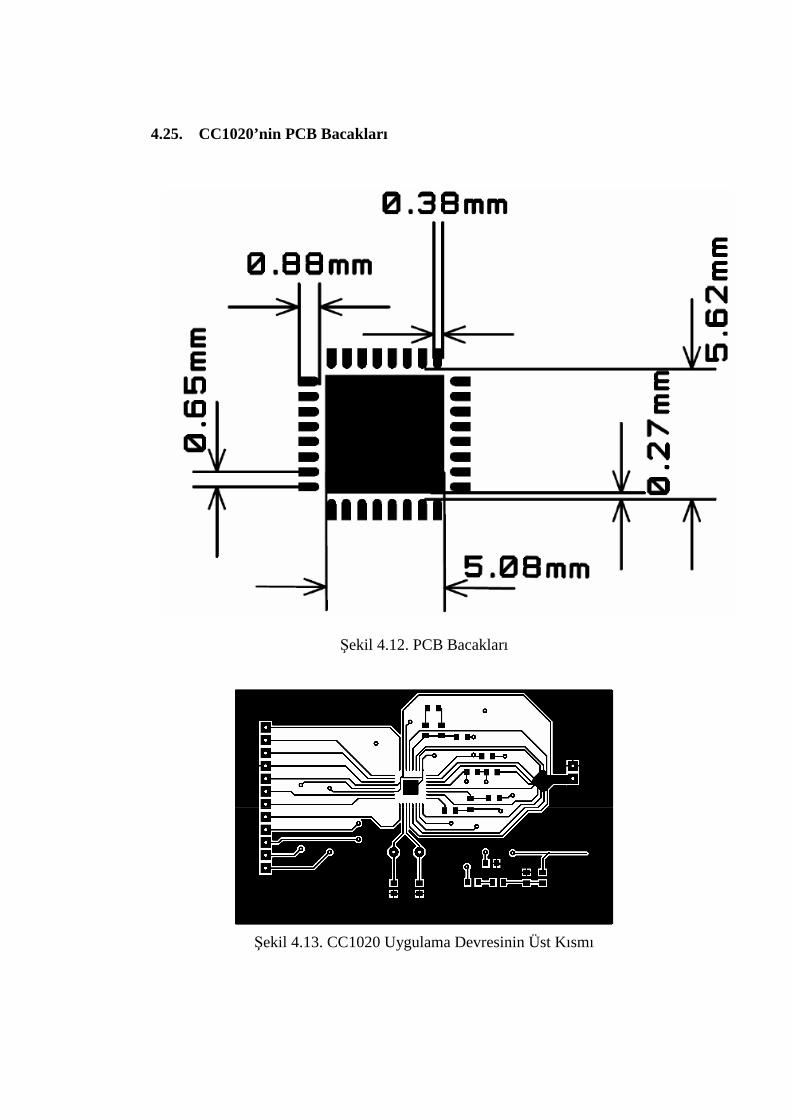
4.25. CC1020’nin PCB Bacakları
Şekil 4.12. PCB Bacakları
Şekil 4.13. CC1020 Uygulama Devresinin Üst Kısmı
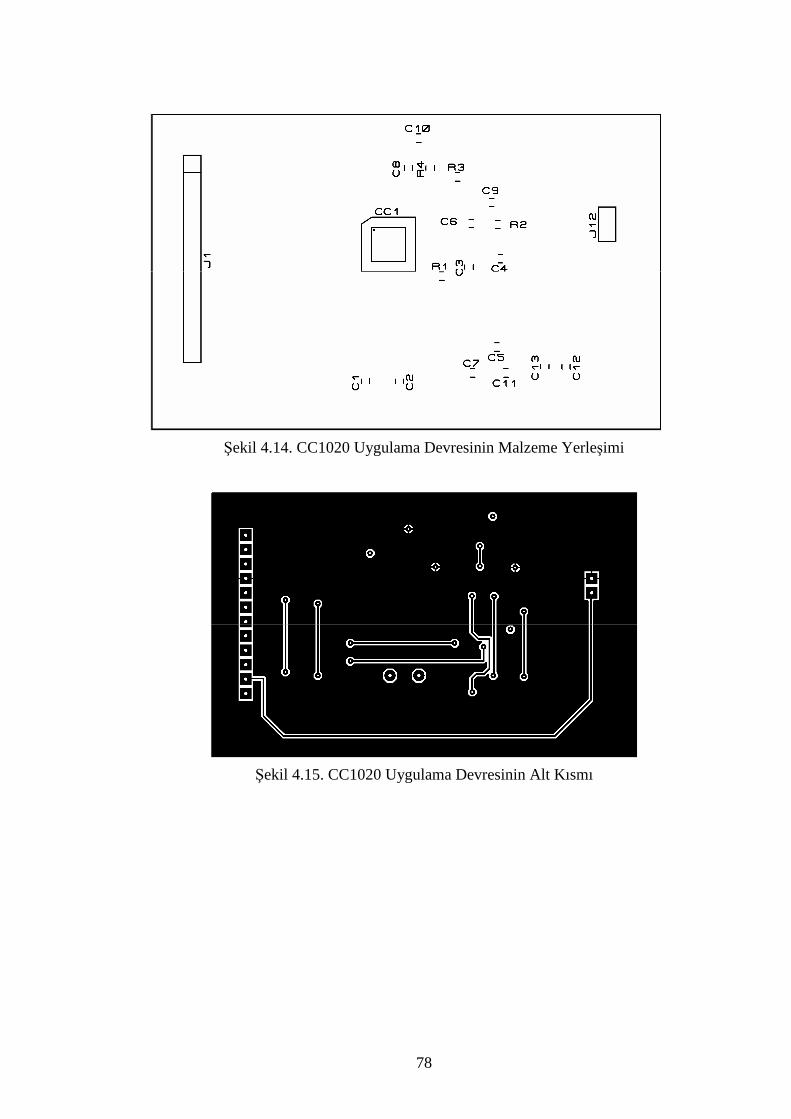
78
Şekil 4.14. CC1020 Uygulama Devresinin Malzeme Yerleşimi
Şekil 4.15. CC1020 Uygulama Devresinin Alt Kısmı
5. BÖLÜM: MSP430F169 TEXAS INSTRUMENTS [7]
5.1. Tanımı
Texas Instruments’ın ürettiği ultra düşük güçlü microdenetleyicisi MSP430 ailesi,
özellikle düşük güç uygulamaları için tasarlanmıştır. Düşük güç tüketimi 5 farklı güç
modu ile ayarlanır. Güçlü 16 bit RISC CPU mimarisi, 16 bit saklayıcıları ile
maksimum verimlilik hedeflenmiştir. Dijital olarak kontrol edilen osilatörü (DCO)
sayesinde düşük güç modlarından aktif moda 6 µs ‘den daha az sürede uyandırmaya
izin verir. Bu “hızlı uyanış” düşük güç tüketiminin temel mantığını oluşturur.
• 2 tane16 bit sayıcı,
• Hızlı 12 bit a/d dönüştürücü,
• Çift 12 bit d/a dönüştürücü
• 2 tane UART, SPI, I2C arayüzeyleri
• DMA ve I/O
MSP430/16x serileri halinde ailere sahiptir. Tipik uygulamaları ise;
• Sensör Sistemleri,
• Endüstriyel Kontrol Uygulamaları,
• Mobil Aletleri Đçermektedir.
MSP430 serisi çeşitli uygulamalara yönelik farklı modüller içeren ultra düşük güçlü
bir mikrodenetleyici ailesidir. Düşük güç tüketimi sayesinde temelde pilli
uygulamalar için tavsiye edilen bir çözümdür.
• MSP430 16-bit RISC Mimarisi,
• 16-bit CPU tümleşik saklayıcı ve sabit üreteç ile maksimum kod verimi elde
edilmektedir,
• Sayısal kontrollü osilatör 6 µs’den daha kısa sürede stabil çalışmaya
başlayabilmektedir,
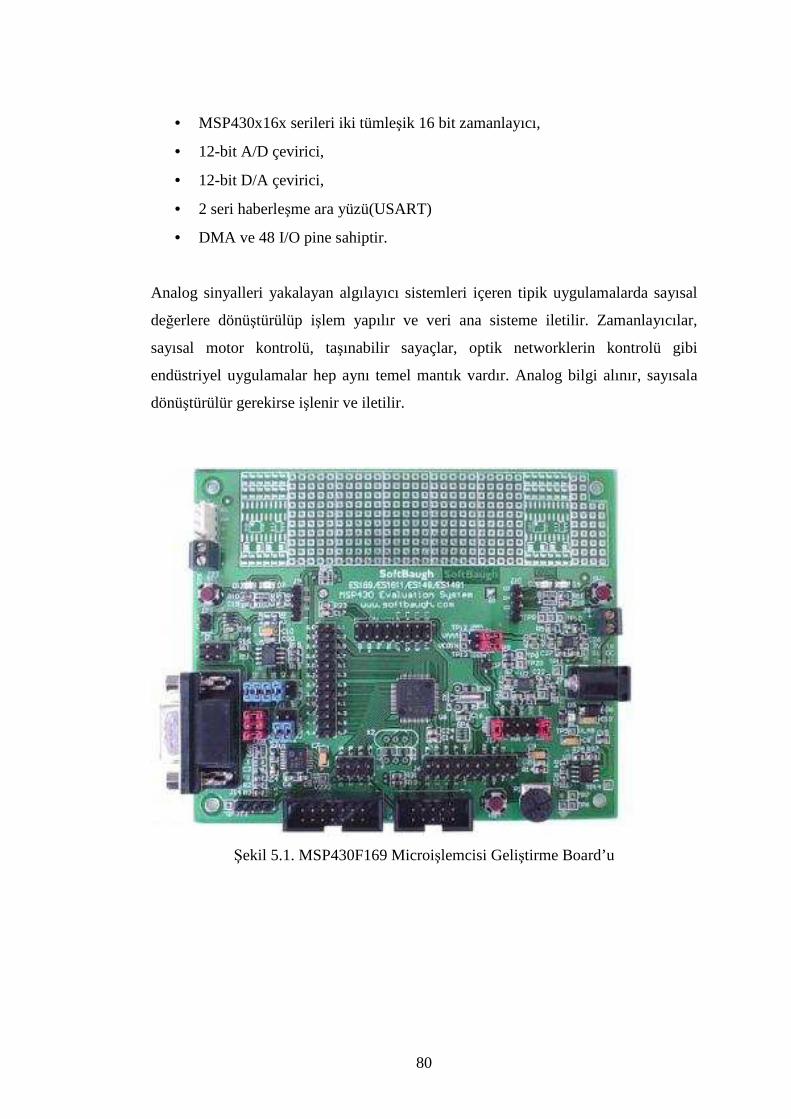
80
• MSP430x16x serileri iki tümleşik 16 bit zamanlayıcı,
• 12-bit A/D çevirici,
• 12-bit D/A çevirici,
• 2 seri haberleşme ara yüzü(USART)
• DMA ve 48 I/O pine sahiptir.
Analog sinyalleri yakalayan algılayıcı sistemleri içeren tipik uygulamalarda sayısal
değerlere dönüştürülüp işlem yapılır ve veri ana sisteme iletilir. Zamanlayıcılar,
sayısal motor kontrolü, taşınabilir sayaçlar, optik networklerin kontrolü gibi
endüstriyel uygulamalar hep aynı temel mantık vardır. Analog bilgi alınır, sayısala
dönüştürülür gerekirse işlenir ve iletilir.
Şekil 5.1. MSP430F169 Microişlemcisi Geliştirme Board’u
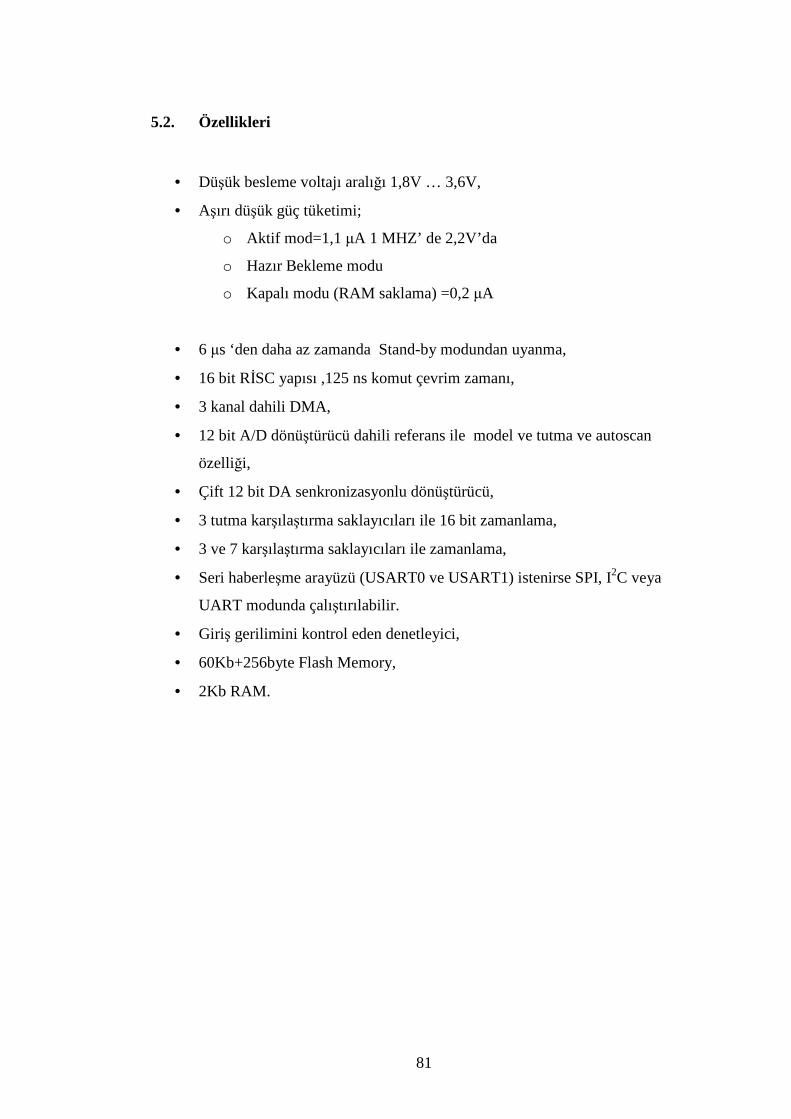
81
5.2. Özellikleri
• Düşük besleme voltajı aralığı 1,8V … 3,6V,
• Aşırı düşük güç tüketimi;
o Aktif mod=1,1 µA 1 MHZ’ de 2,2V’da
o Hazır Bekleme modu
o Kapalı modu (RAM saklama) =0,2 µA
• 6 µs ‘den daha az zamanda Stand-by modundan uyanma,
• 16 bit RĐSC yapısı ,125 ns komut çevrim zamanı,
• 3 kanal dahili DMA,
• 12 bit A/D dönüştürücü dahili referans ile model ve tutma ve autoscan
özelliği,
• Çift 12 bit DA senkronizasyonlu dönüştürücü,
• 3 tutma karşılaştırma saklayıcıları ile 16 bit zamanlama,
• 3 ve 7 karşılaştırma saklayıcıları ile zamanlama,
• Seri haberleşme arayüzü (USART0 ve USART1) istenirse SPI, I2C veya
UART modunda çalıştırılabilir.
• Giriş gerilimini kontrol eden denetleyici,
• 60Kb+256byte Flash Memory,
• 2Kb RAM.
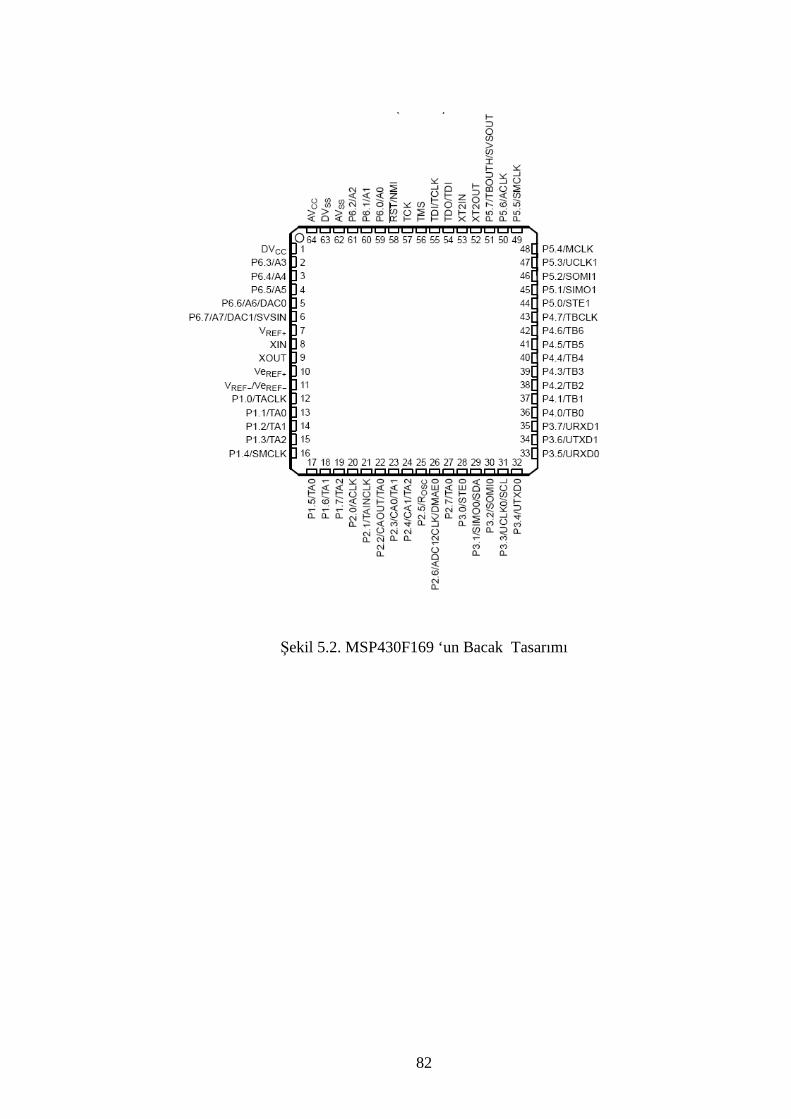
82
Şekil 5.2. MSP430F169 ‘un Bacak Tasarımı
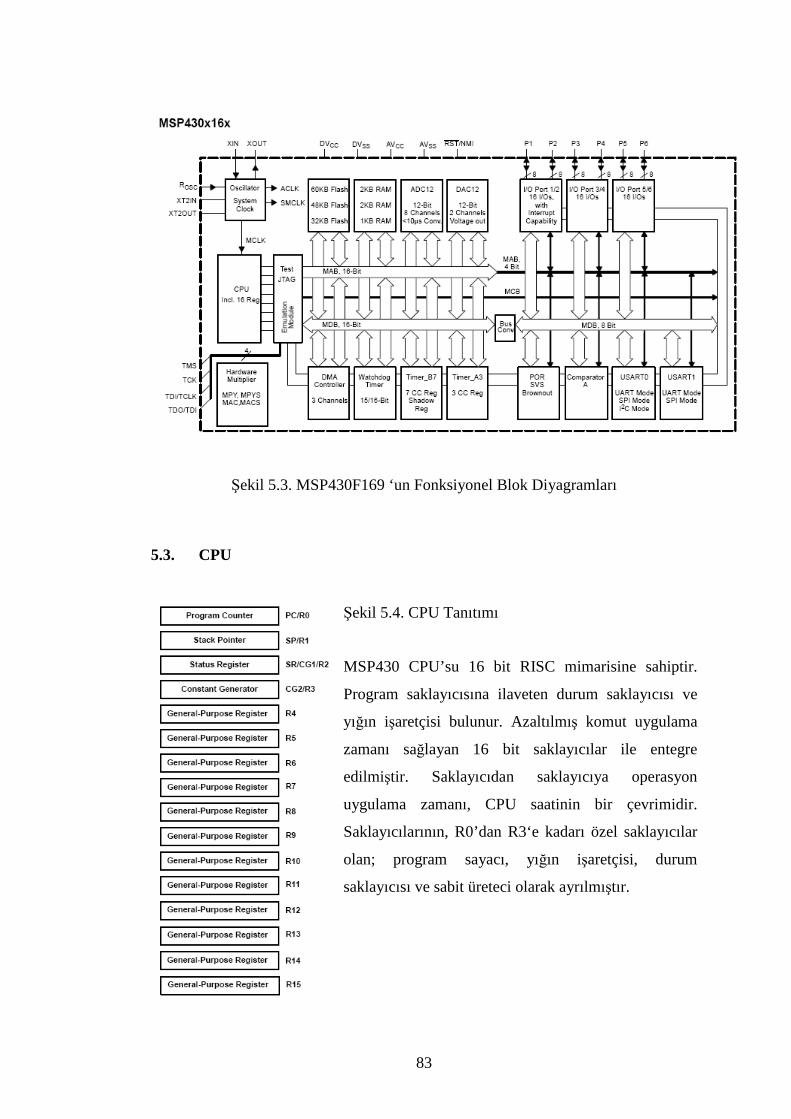
83
Şekil 5.3. MSP430F169 ‘un Fonksiyonel Blok Diyagramları
5.3. CPU
Şekil 5.4. CPU Tanıtımı
MSP430 CPU’su 16 bit RISC mimarisine sahiptir.
Program saklayıcısına ilaveten durum saklayıcısı ve
yığın işaretçisi bulunur. Azaltılmış komut uygulama
zamanı sağlayan 16 bit saklayıcılar ile entegre
edilmiştir. Saklayıcıdan saklayıcıya operasyon
uygulama zamanı, CPU saatinin bir çevrimidir.
Saklayıcılarının, R0’dan R3‘e kadarı özel saklayıcılar
olan; program sayacı, yığın işaretçisi, durum
saklayıcısı ve sabit üreteci olarak ayrılmıştır.
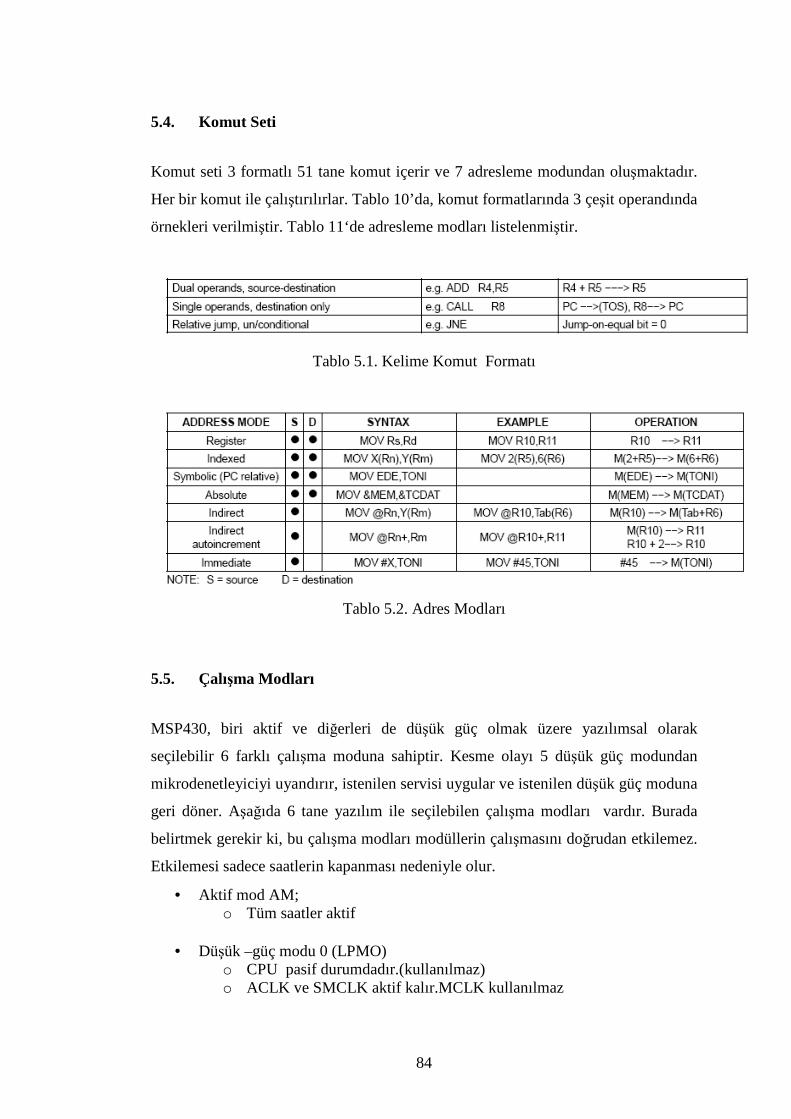
84
5.4. Komut Seti
Komut seti 3 formatlı 51 tane komut içerir ve 7 adresleme modundan oluşmaktadır.
Her bir komut ile çalıştırılırlar. Tablo 10’da, komut formatlarında 3 çeşit operandında
örnekleri verilmiştir. Tablo 11‘de adresleme modları listelenmiştir.
Tablo 5.1. Kelime Komut Formatı
Tablo 5.2. Adres Modları
5.5. Çalışma Modları
MSP430, biri aktif ve diğerleri de düşük güç olmak üzere yazılımsal olarak
seçilebilir 6 farklı çalışma moduna sahiptir. Kesme olayı 5 düşük güç modundan
mikrodenetleyiciyi uyandırır, istenilen servisi uygular ve istenilen düşük güç moduna
geri döner. Aşağıda 6 tane yazılım ile seçilebilen çalışma modları vardır. Burada
belirtmek gerekir ki, bu çalışma modları modüllerin çalışmasını doğrudan etkilemez.
Etkilemesi sadece saatlerin kapanması nedeniyle olur.
• Aktif mod AM; o Tüm saatler aktif
• Düşük –güç modu 0 (LPMO) o CPU pasif durumdadır.(kullanılmaz) o ACLK ve SMCLK aktif kalır.MCLK kullanılmaz
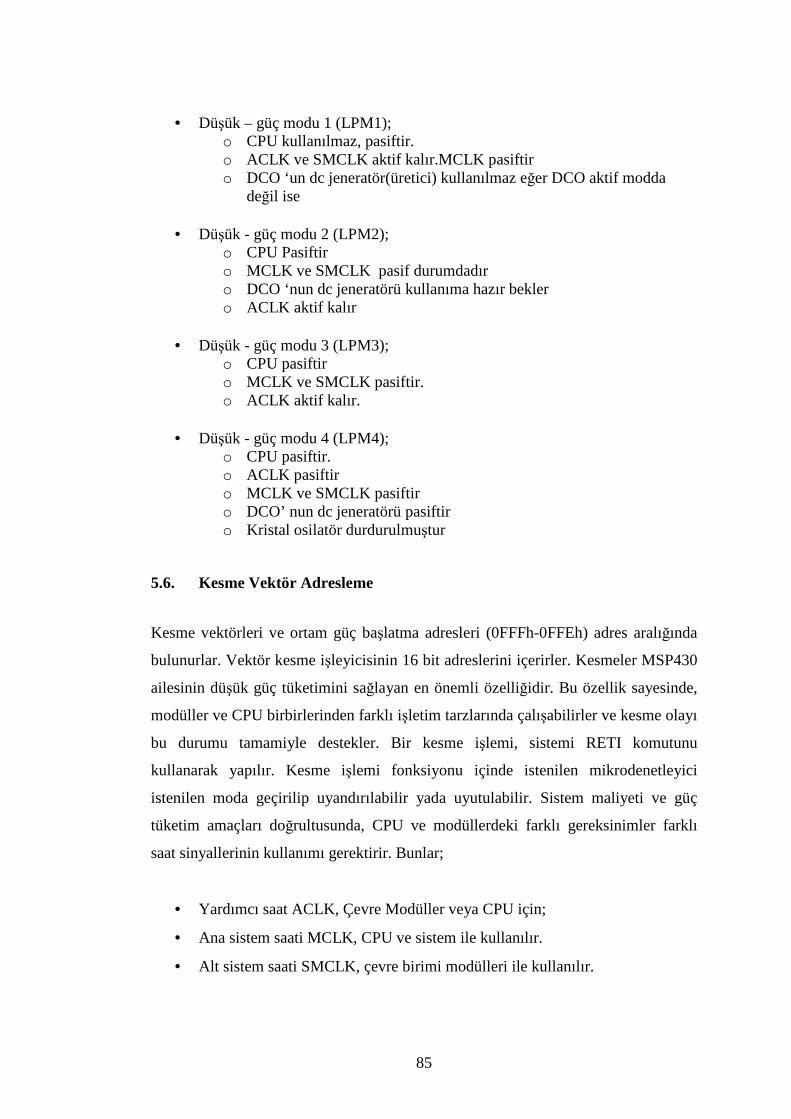
85
• Düşük – güç modu 1 (LPM1); o CPU kullanılmaz, pasiftir. o ACLK ve SMCLK aktif kalır.MCLK pasiftir o DCO ‘un dc jeneratör(üretici) kullanılmaz eğer DCO aktif modda
değil ise
• Düşük - güç modu 2 (LPM2); o CPU Pasiftir o MCLK ve SMCLK pasif durumdadır o DCO ‘nun dc jeneratörü kullanıma hazır bekler o ACLK aktif kalır
• Düşük - güç modu 3 (LPM3); o CPU pasiftir o MCLK ve SMCLK pasiftir. o ACLK aktif kalır.
• Düşük - güç modu 4 (LPM4); o CPU pasiftir. o ACLK pasiftir o MCLK ve SMCLK pasiftir o DCO’ nun dc jeneratörü pasiftir o Kristal osilatör durdurulmuştur
5.6. Kesme Vektör Adresleme
Kesme vektörleri ve ortam güç başlatma adresleri (0FFFh-0FFEh) adres aralığında
bulunurlar. Vektör kesme işleyicisinin 16 bit adreslerini içerirler. Kesmeler MSP430
ailesinin düşük güç tüketimini sağlayan en önemli özelliğidir. Bu özellik sayesinde,
modüller ve CPU birbirlerinden farklı işletim tarzlarında çalışabilirler ve kesme olayı
bu durumu tamamiyle destekler. Bir kesme işlemi, sistemi RETI komutunu
kullanarak yapılır. Kesme işlemi fonksiyonu içinde istenilen mikrodenetleyici
istenilen moda geçirilip uyandırılabilir yada uyutulabilir. Sistem maliyeti ve güç
tüketim amaçları doğrultusunda, CPU ve modüllerdeki farklı gereksinimler farklı
saat sinyallerinin kullanımı gerektirir. Bunlar;
• Yardımcı saat ACLK, Çevre Modüller veya CPU için;
• Ana sistem saati MCLK, CPU ve sistem ile kullanılır.
• Alt sistem saati SMCLK, çevre birimi modülleri ile kullanılır.
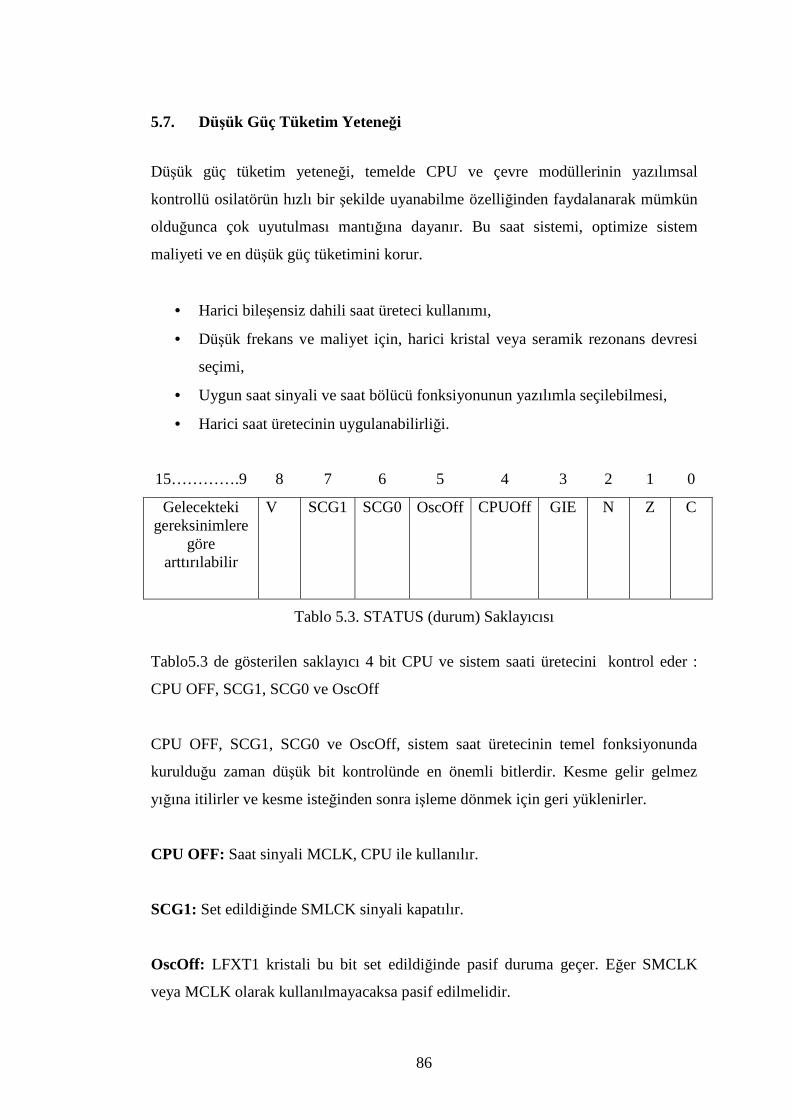
86
5.7. Düşük Güç Tüketim Yeteneği
Düşük güç tüketim yeteneği, temelde CPU ve çevre modüllerinin yazılımsal
kontrollü osilatörün hızlı bir şekilde uyanabilme özelliğinden faydalanarak mümkün
olduğunca çok uyutulması mantığına dayanır. Bu saat sistemi, optimize sistem
maliyeti ve en düşük güç tüketimini korur.
• Harici bileşensiz dahili saat üreteci kullanımı,
• Düşük frekans ve maliyet için, harici kristal veya seramik rezonans devresi
seçimi,
• Uygun saat sinyali ve saat bölücü fonksiyonunun yazılımla seçilebilmesi,
• Harici saat üretecinin uygulanabilirliği.
15………….9 8 7 6 5 4 3 2 1 0
Gelecekteki gereksinimlere
göre arttırılabilir
V SCG1
SCG0
OscOff CPUOff
GIE
N
Z
C
Tablo 5.3. STATUS (durum) Saklayıcısı
Tablo5.3 de gösterilen saklayıcı 4 bit CPU ve sistem saati üretecini kontrol eder :
CPU OFF, SCG1, SCG0 ve OscOff
CPU OFF, SCG1, SCG0 ve OscOff, sistem saat üretecinin temel fonksiyonunda
kurulduğu zaman düşük bit kontrolünde en önemli bitlerdir. Kesme gelir gelmez
yığına itilirler ve kesme isteğinden sonra işleme dönmek için geri yüklenirler.
CPU OFF: Saat sinyali MCLK, CPU ile kullanılır.
SCG1: Set edildiğinde SMLCK sinyali kapatılır.
OscOff: LFXT1 kristali bu bit set edildiğinde pasif duruma geçer. Eğer SMCLK
veya MCLK olarak kullanılmayacaksa pasif edilmelidir.
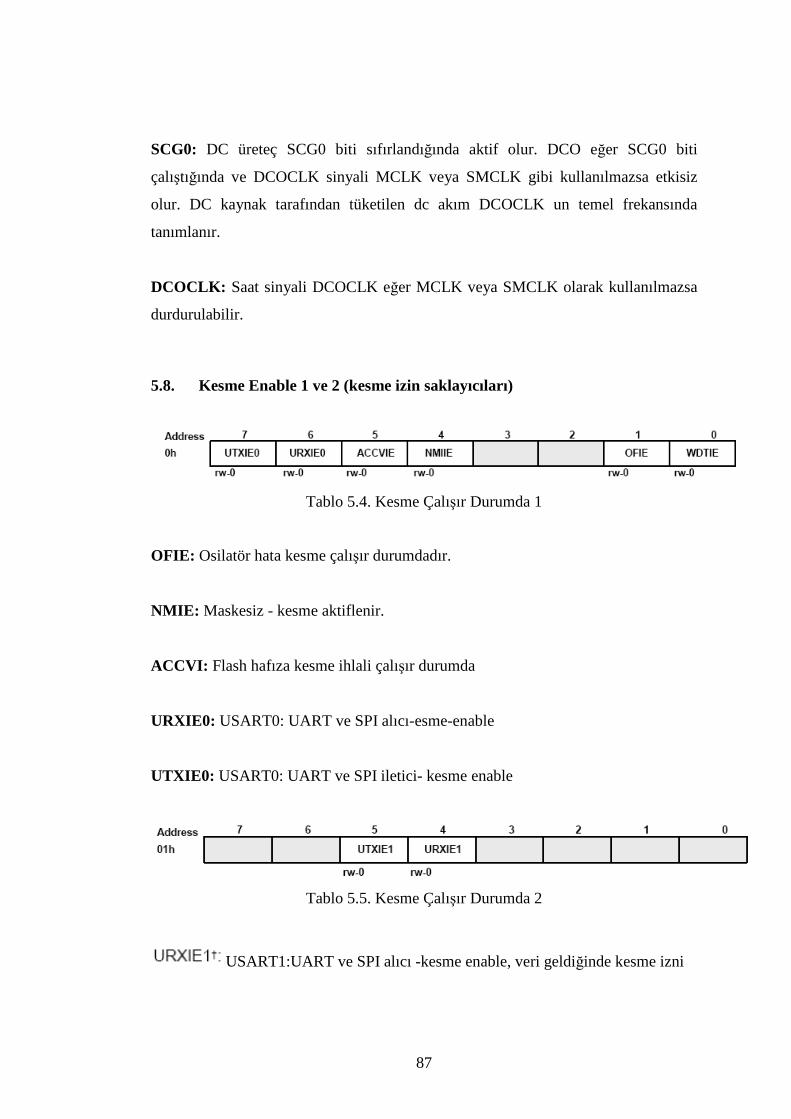
87
SCG0: DC üreteç SCG0 biti sıfırlandığında aktif olur. DCO eğer SCG0 biti
çalıştığında ve DCOCLK sinyali MCLK veya SMCLK gibi kullanılmazsa etkisiz
olur. DC kaynak tarafından tüketilen dc akım DCOCLK un temel frekansında
tanımlanır.
DCOCLK: Saat sinyali DCOCLK eğer MCLK veya SMCLK olarak kullanılmazsa
durdurulabilir.
5.8. Kesme Enable 1 ve 2 (kesme izin saklayıcıları)
Tablo 5.4. Kesme Çalışır Durumda 1
OFIE: Osilatör hata kesme çalışır durumdadır.
NMIE: Maskesiz - kesme aktiflenir.
ACCVI: Flash hafıza kesme ihlali çalışır durumda
URXIE0: USART0: UART ve SPI alıcı-esme-enable
UTXIE0: USART0: UART ve SPI iletici- kesme enable
Tablo 5.5. Kesme Çalışır Durumda 2
USART1:UART ve SPI alıcı -kesme enable, veri geldiğinde kesme izni
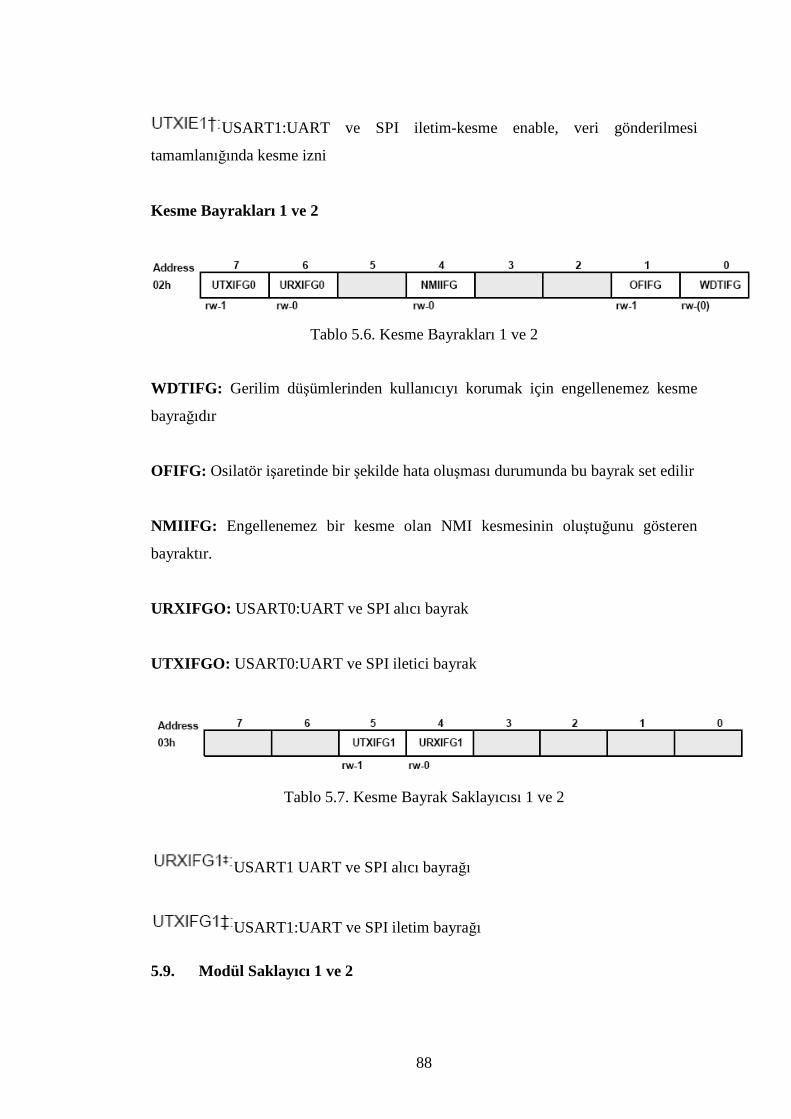
88
USART1:UART ve SPI iletim-kesme enable, veri gönderilmesi
tamamlanığında kesme izni
Kesme Bayrakları 1 ve 2
Tablo 5.6. Kesme Bayrakları 1 ve 2
WDTIFG: Gerilim düşümlerinden kullanıcıyı korumak için engellenemez kesme
bayrağıdır
OFIFG: Osilatör işaretinde bir şekilde hata oluşması durumunda bu bayrak set edilir
NMIIFG: Engellenemez bir kesme olan NMI kesmesinin oluştuğunu gösteren
bayraktır.
URXIFGO: USART0:UART ve SPI alıcı bayrak
UTXIFGO: USART0:UART ve SPI iletici bayrak
Tablo 5.7. Kesme Bayrak Saklayıcısı 1 ve 2
USART1 UART ve SPI alıcı bayrağı
USART1:UART ve SPI iletim bayrağı
5.9. Modül Saklayıcı 1 ve 2
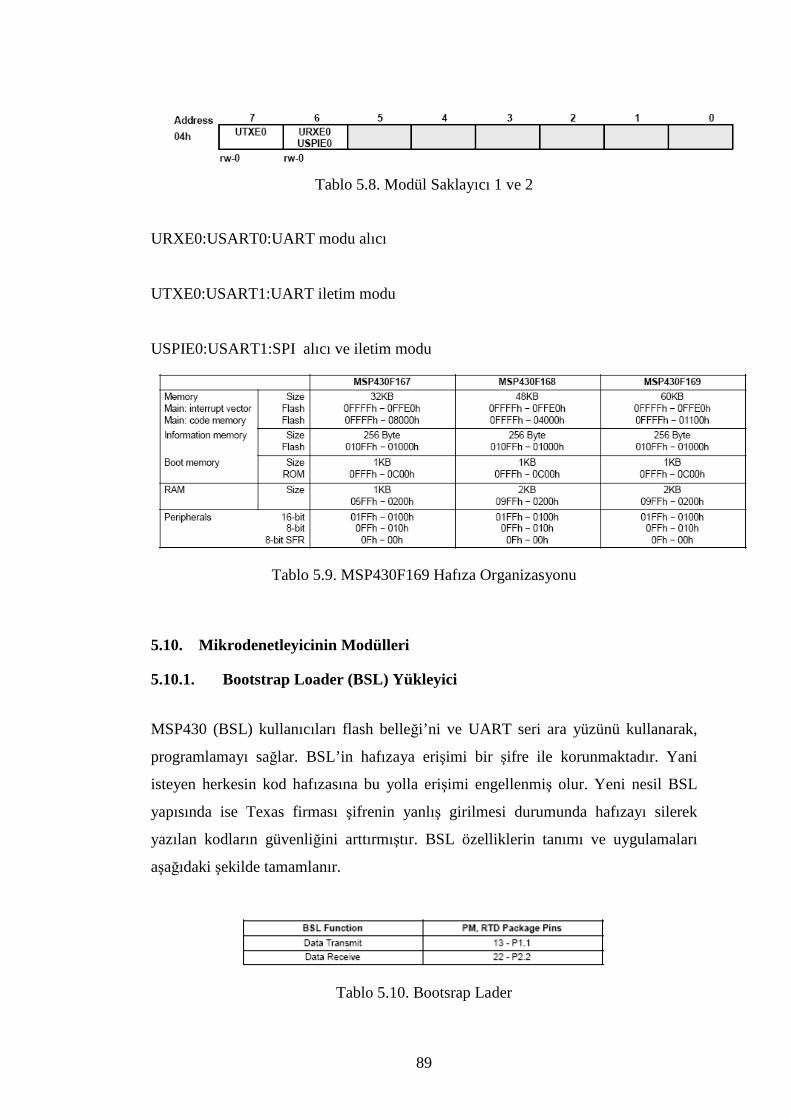
89
Tablo 5.8. Modül Saklayıcı 1 ve 2
URXE0:USART0:UART modu alıcı
UTXE0:USART1:UART iletim modu
USPIE0:USART1:SPI alıcı ve iletim modu
Tablo 5.9. MSP430F169 Hafıza Organizasyonu
5.10. Mikrodenetleyicinin Modülleri
5.10.1. Bootstrap Loader (BSL) Yükleyici
MSP430 (BSL) kullanıcıları flash belleği’ni ve UART seri ara yüzünü kullanarak,
programlamayı sağlar. BSL’in hafızaya erişimi bir şifre ile korunmaktadır. Yani
isteyen herkesin kod hafızasına bu yolla erişimi engellenmiş olur. Yeni nesil BSL
yapısında ise Texas firması şifrenin yanlış girilmesi durumunda hafızayı silerek
yazılan kodların güvenliğini arttırmıştır. BSL özelliklerin tanımı ve uygulamaları
aşağıdaki şekilde tamamlanır.
Tablo 5.10. Bootsrap Lader
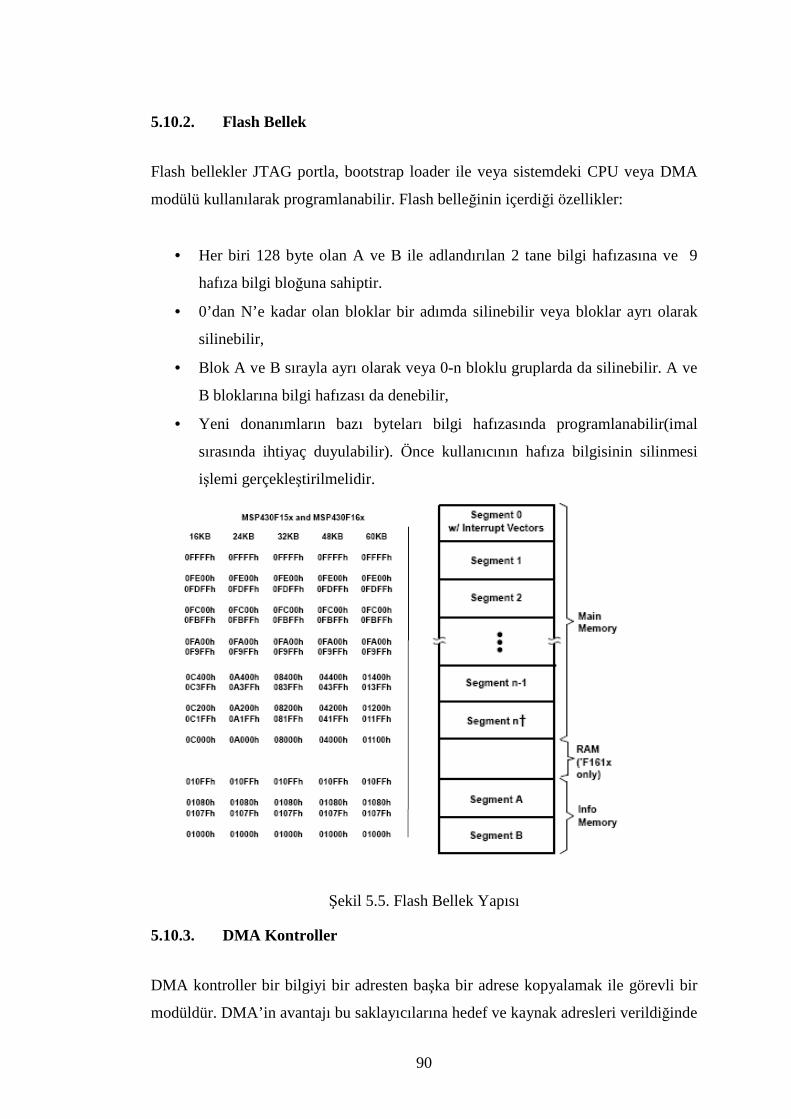
90
5.10.2. Flash Bellek
Flash bellekler JTAG portla, bootstrap loader ile veya sistemdeki CPU veya DMA
modülü kullanılarak programlanabilir. Flash belleğinin içerdiği özellikler:
• Her biri 128 byte olan A ve B ile adlandırılan 2 tane bilgi hafızasına ve 9
hafıza bilgi bloğuna sahiptir.
• 0’dan N’e kadar olan bloklar bir adımda silinebilir veya bloklar ayrı olarak
silinebilir,
• Blok A ve B sırayla ayrı olarak veya 0-n bloklu gruplarda da silinebilir. A ve
B bloklarına bilgi hafızası da denebilir,
• Yeni donanımların bazı byteları bilgi hafızasında programlanabilir(imal
sırasında ihtiyaç duyulabilir). Önce kullanıcının hafıza bilgisinin silinmesi
işlemi gerçekleştirilmelidir.
Şekil 5.5. Flash Bellek Yapısı
5.10.3. DMA Kontroller
DMA kontroller bir bilgiyi bir adresten başka bir adrese kopyalamak ile görevli bir
modüldür. DMA’in avantajı bu saklayıcılarına hedef ve kaynak adresleri verildiğinde
91
kopyalama işlemini gerçekleştirebilmek için CPU’ya ihtiyaç duymamasıdır. örnek
olarak ADC den okunan değerlerin bulunduğu ADC12MEM0 saklayıcısındaki
bilgiler her istenen saat çevriminde bir başlangıç adresi verilen hafızaya
kopyalanabilmektedir. Bu işlem sırasında sadece çalıştığı için ADC modülü ve
kopyalama yaparken çalışan DMA modülünün aktif olması yeterlidir. Bu yöntem
düşük güç tüketim özelliği ile ön plana çıkan MSP430 ailesinin güç tüketiminin diğer
mikrodenetleyicilerinkinden daha da az olabilmesini sağlamıştır.
DMA kontroller her modülün saklayıcısına erişebilmekte ve buradan aldığı bilgileri
istenilen saklayıcıya gerek hafıza, gerek RAM gerekse diğer modüllerin
saklayıcılarına aktarabilmektedir. Tabii ki bunun tersi de geçerlidir.
5.10.4. Osilatör ve Sistem Saati
MSP430x16x donanımı ailesi, yüksek hız kristal osilatöre ve dijital kontrollü
osilatöre (DCO) ilaveten bir de düşük güç tüketiminin desteklenmesi için düşük hızlı
harici bir osilatörü (ACLK) destekler. Bu osilatör tipik olarak 32768 Hz ayarlıdır.
Zaman saati bu osilatörü baz alarak çalışır. Ana saat modülü, sistemin düşük güçlü
olduğu göz önüne alınarak dizayn edilmiştir. DCO’nun da güç çekmemesini
sağlamak ve bekleme modunda kapalı durmasını sağlamak için DCO 6 µs’den daha
kısa bir sürede stabil sinyal üretebilen bir duruma gelebilmektedir. Ana saat modülü
aşağıdaki saat sinyalini sağlar.
• Yardımcı saat (ACLK) zaman kristalinden kaynak alır. Tipik değeri 32768
Hz’dir.
• Ana saat (MCLK) CPU tarafından kullanılan sistem saatidir ACLK’dan veya
hızlı kristalden beslenebilir.
• Alt ana saat (SMCLK) periferik modülleri tarafından kullanılan alt sistem
saatidir. ACLK, DCO veya hızlı kristalden beslenir.
92
5.10.5. Gerilim Denetleyici
Voltaj denetleyici (SVS) devresi, besleme gerilimi, kullanıcının seçtiği seviyeden
aşağı düştüğünü algılamak için dizayn edilmiştir. Donanım otomatik olarak tekrar
başlatılır. Mikrodenetleyici belirlenenden daha düşük voltajlarda da çalışabileceği
için çıkış portlarının istenen gerilim seviyelerini sağlamaması durumu programın
doğru koşması fakat mikrodenetleyiciden ona bağlı diğer birimlere eşik
seviyelerinden daha düşük gerilimlerin gitmesinin engellenmesini sağlar.
6 tane 8 bit I/O P1 ve P6 portları bulunmaktadır.
• Tüm ayrı I/O portları bağımsız olarak programlanabilir,
• Giriş ve çıkışın komut sıraları ve kesme durumları olasıdır,
• P1 ve P2’nin portlarının 8 bitleri için kesime giriş kapasiteleri uçları
seçilmelidir,
• Tüm komutlar tarafından port kontrol girişlerine yazma ve okuma girişleri
desteklenir.
5.10.6. Watchdog Timer
WDT modülünün ilk fonksiyonu yazılımsal bir hata oluştuğunda donanımı RESET
etmesidir. Eğer bu özelliği kullanılmak istenmiyorsa belirlenen aralıklarla kesme
üretmesi sağlanabilir. Bu kullanımıyla bir sayıcı/zamanlayıcı gibi de
çalışabilmektedir. 4 farklı zaman için kesme üretebilir ve osilatör olarak ACLK,
DCO veya hızlı osilatör isteğe göre seçilebilir.
5.10.7. USART0
MSP430 ailesinin içinde dahili olarak 2 adet USART modülü bulunmaktadır. Bu
modül 3 farklı modda çalışabilmektedir.
• SPI
• I2C
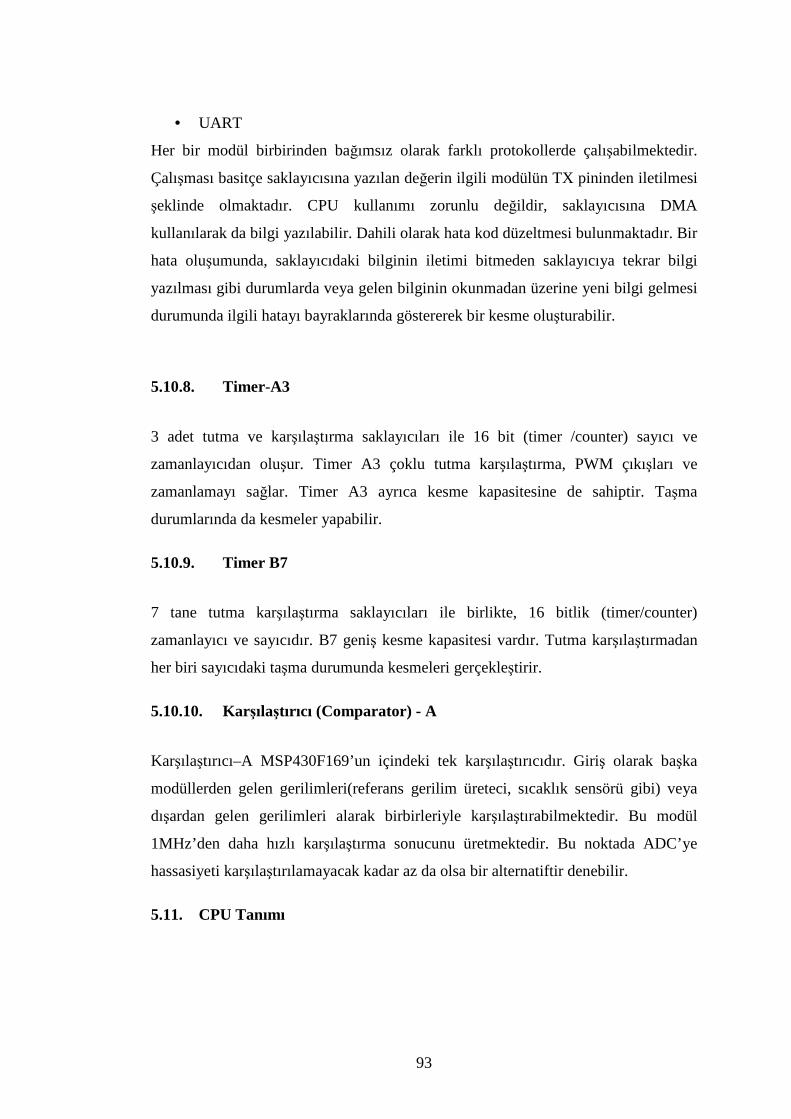
93
• UART
Her bir modül birbirinden bağımsız olarak farklı protokollerde çalışabilmektedir.
Çalışması basitçe saklayıcısına yazılan değerin ilgili modülün TX pininden iletilmesi
şeklinde olmaktadır. CPU kullanımı zorunlu değildir, saklayıcısına DMA
kullanılarak da bilgi yazılabilir. Dahili olarak hata kod düzeltmesi bulunmaktadır. Bir
hata oluşumunda, saklayıcıdaki bilginin iletimi bitmeden saklayıcıya tekrar bilgi
yazılması gibi durumlarda veya gelen bilginin okunmadan üzerine yeni bilgi gelmesi
durumunda ilgili hatayı bayraklarında göstererek bir kesme oluşturabilir.
5.10.8. Timer-A3
3 adet tutma ve karşılaştırma saklayıcıları ile 16 bit (timer /counter) sayıcı ve
zamanlayıcıdan oluşur. Timer A3 çoklu tutma karşılaştırma, PWM çıkışları ve
zamanlamayı sağlar. Timer A3 ayrıca kesme kapasitesine de sahiptir. Taşma
durumlarında da kesmeler yapabilir.
5.10.9. Timer B7
7 tane tutma karşılaştırma saklayıcıları ile birlikte, 16 bitlik (timer/counter)
zamanlayıcı ve sayıcıdır. B7 geniş kesme kapasitesi vardır. Tutma karşılaştırmadan
her biri sayıcıdaki taşma durumunda kesmeleri gerçekleştirir.
5.10.10. Kar şılaştırıcı (Comparator) - A
Karşılaştırıcı–A MSP430F169’un içindeki tek karşılaştırıcıdır. Giriş olarak başka
modüllerden gelen gerilimleri(referans gerilim üreteci, sıcaklık sensörü gibi) veya
dışardan gelen gerilimleri alarak birbirleriyle karşılaştırabilmektedir. Bu modül
1MHz’den daha hızlı karşılaştırma sonucunu üretmektedir. Bu noktada ADC’ye
hassasiyeti karşılaştırılamayacak kadar az da olsa bir alternatiftir denebilir.
5.11. CPU Tanımı
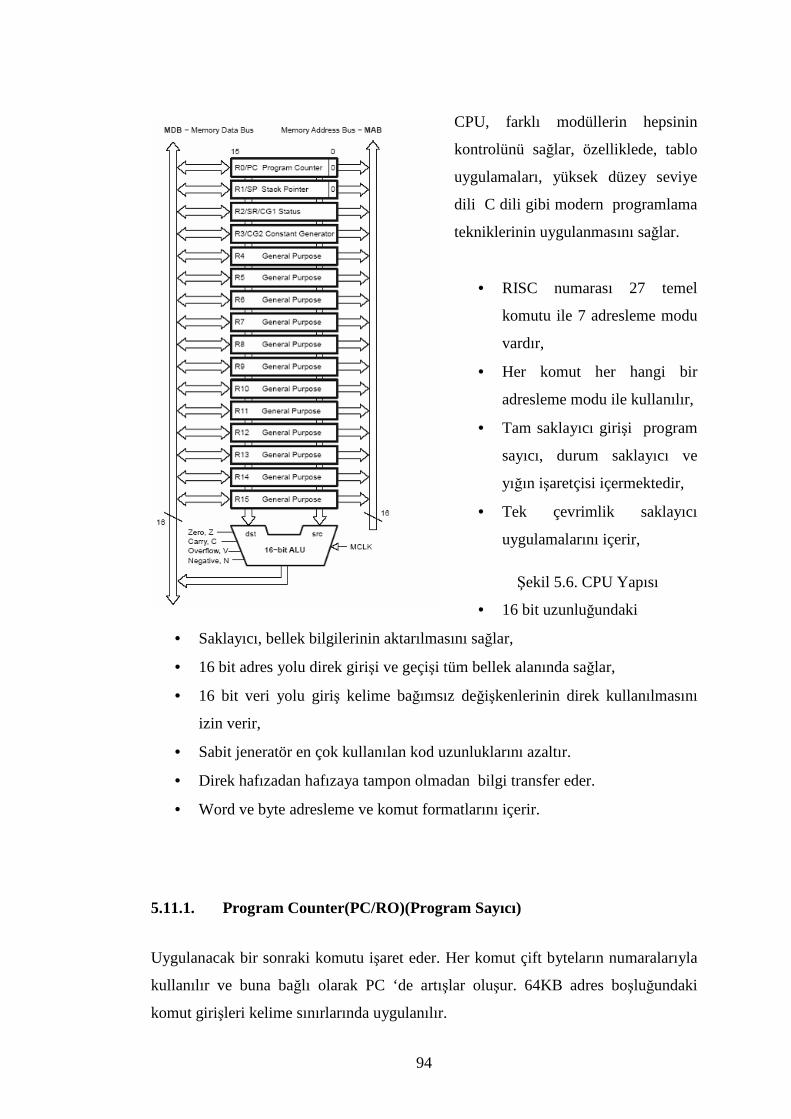
94
CPU, farklı modüllerin hepsinin
kontrolünü sağlar, özelliklede, tablo
uygulamaları, yüksek düzey seviye
dili C dili gibi modern programlama
tekniklerinin uygulanmasını sağlar.
• RISC numarası 27 temel
komutu ile 7 adresleme modu
vardır,
• Her komut her hangi bir
adresleme modu ile kullanılır,
• Tam saklayıcı girişi program
sayıcı, durum saklayıcı ve
yığın işaretçisi içermektedir,
• Tek çevrimlik saklayıcı
uygulamalarını içerir,
• 16 bit uzunluğundaki
• Saklayıcı, bellek bilgilerinin aktarılmasını sağlar,
• 16 bit adres yolu direk girişi ve geçişi tüm bellek alanında sağlar,
• 16 bit veri yolu giriş kelime bağımsız değişkenlerinin direk kullanılmasını
izin verir,
• Sabit jeneratör en çok kullanılan kod uzunluklarını azaltır.
• Direk hafızadan hafızaya tampon olmadan bilgi transfer eder.
• Word ve byte adresleme ve komut formatlarını içerir.
5.11.1. Program Counter(PC/RO)(Program Sayıcı)
Uygulanacak bir sonraki komutu işaret eder. Her komut çift byteların numaralarıyla
kullanılır ve buna bağlı olarak PC ‘de artışlar oluşur. 64KB adres boşluğundaki
komut girişleri kelime sınırlarında uygulanılır.
Şekil 5.6. CPU Yapısı
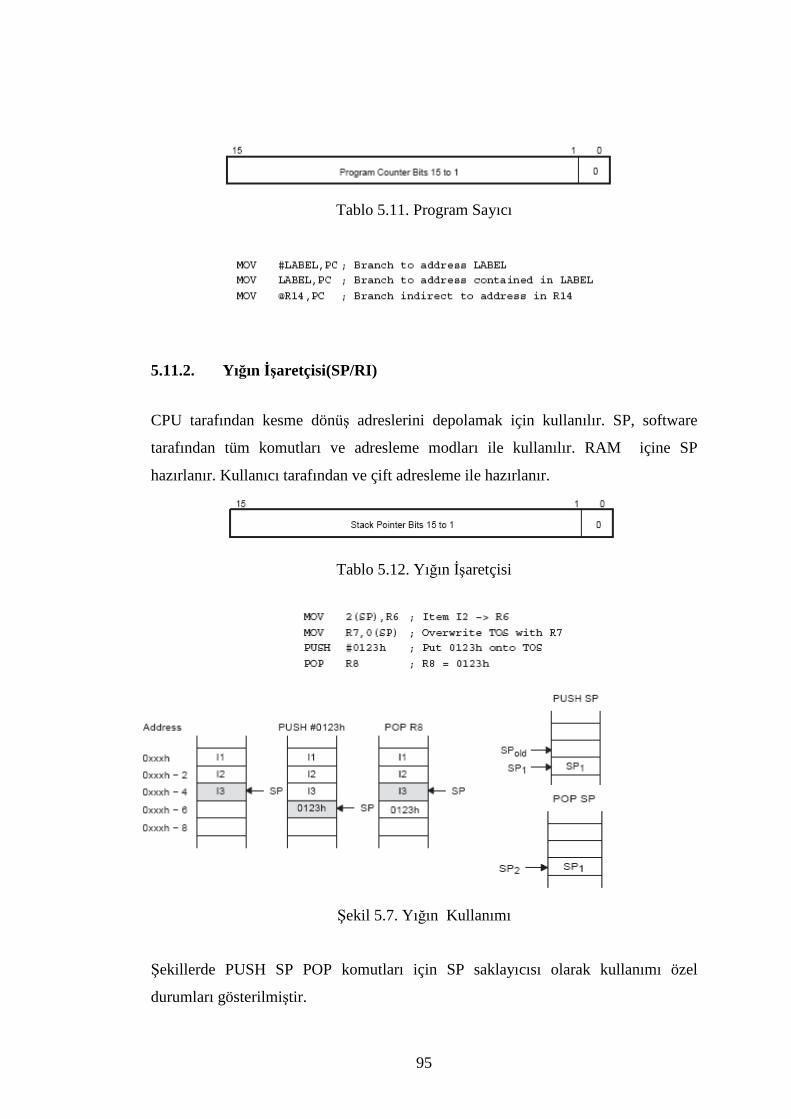
95
Tablo 5.11. Program Sayıcı
5.11.2. Yığın Đşaretçisi(SP/RI)
CPU tarafından kesme dönüş adreslerini depolamak için kullanılır. SP, software
tarafından tüm komutları ve adresleme modları ile kullanılır. RAM içine SP
hazırlanır. Kullanıcı tarafından ve çift adresleme ile hazırlanır.
Tablo 5.12. Yığın Đşaretçisi
Şekil 5.7. Yığın Kullanımı
Şekillerde PUSH SP POP komutları için SP saklayıcısı olarak kullanımı özel
durumları gösterilmiştir.
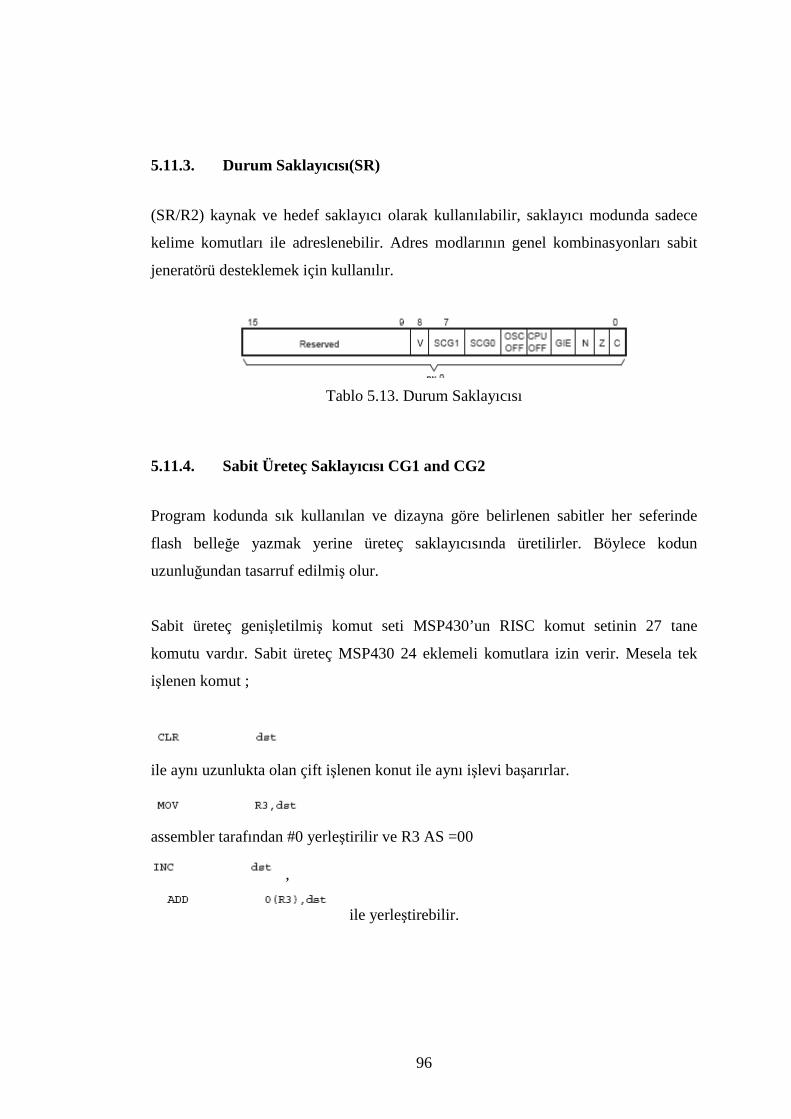
96
5.11.3. Durum Saklayıcısı(SR)
(SR/R2) kaynak ve hedef saklayıcı olarak kullanılabilir, saklayıcı modunda sadece
kelime komutları ile adreslenebilir. Adres modlarının genel kombinasyonları sabit
jeneratörü desteklemek için kullanılır.
Tablo 5.13. Durum Saklayıcısı
5.11.4. Sabit Üreteç Saklayıcısı CG1 and CG2
Program kodunda sık kullanılan ve dizayna göre belirlenen sabitler her seferinde
flash belleğe yazmak yerine üreteç saklayıcısında üretilirler. Böylece kodun
uzunluğundan tasarruf edilmiş olur.
Sabit üreteç genişletilmiş komut seti MSP430’un RISC komut setinin 27 tane
komutu vardır. Sabit üreteç MSP430 24 eklemeli komutlara izin verir. Mesela tek
işlenen komut ;
ile aynı uzunlukta olan çift işlenen konut ile aynı işlevi başarırlar.
assembler tarafından #0 yerleştirilir ve R3 AS =00
,
ile yerleştirebilir.
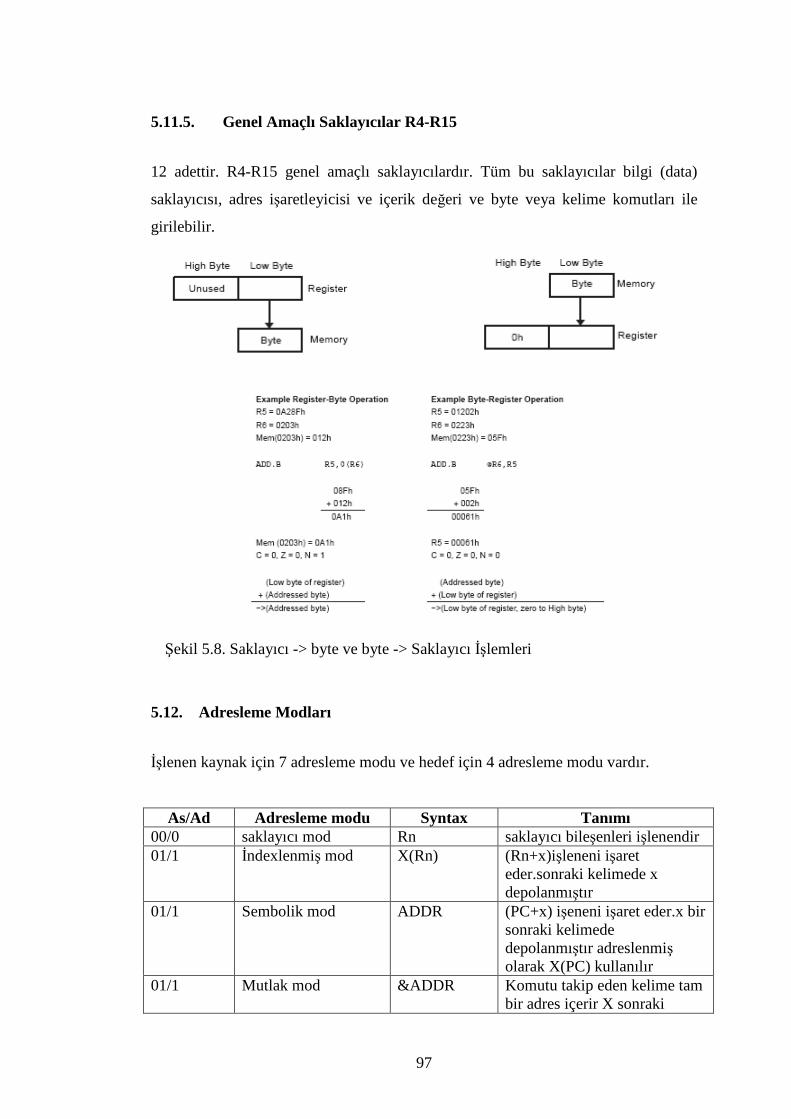
97
5.11.5. Genel Amaçlı Saklayıcılar R4-R15
12 adettir. R4-R15 genel amaçlı saklayıcılardır. Tüm bu saklayıcılar bilgi (data)
saklayıcısı, adres işaretleyicisi ve içerik değeri ve byte veya kelime komutları ile
girilebilir.
5.12. Adresleme Modları
Đşlenen kaynak için 7 adresleme modu ve hedef için 4 adresleme modu vardır.
As/Ad Adresleme modu Syntax Tanımı 00/0 saklayıcı mod Rn saklayıcı bileşenleri işlenendir 01/1 Đndexlenmiş mod X(Rn) (Rn+x)işleneni işaret
eder.sonraki kelimede x depolanmıştır
01/1 Sembolik mod ADDR (PC+x) işeneni işaret eder.x bir sonraki kelimede depolanmıştır adreslenmiş olarak X(PC) kullanılır
01/1 Mutlak mod &ADDR Komutu takip eden kelime tam bir adres içerir X sonraki
Şekil 5.8. Saklayıcı -> byte ve byte -> Saklayıcı Đşlemleri
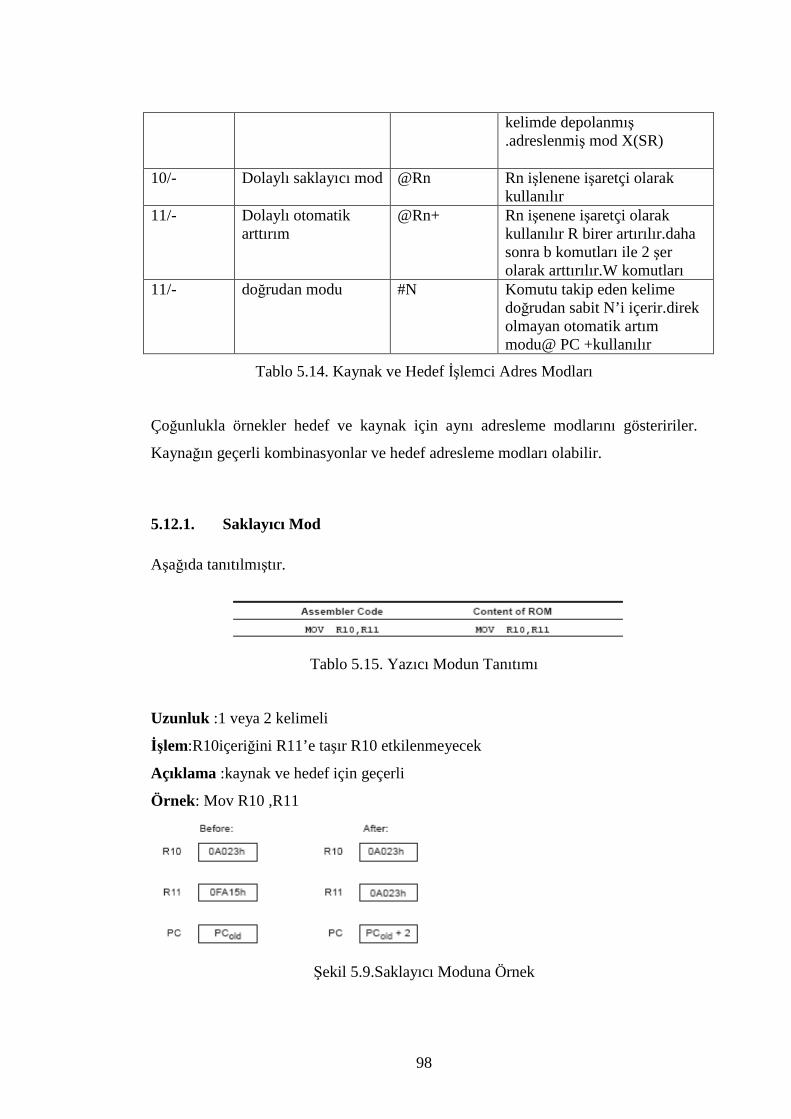
98
kelimde depolanmış .adreslenmiş mod X(SR)
10/- Dolaylı saklayıcı mod @Rn Rn işlenene işaretçi olarak kullanılır
11/- Dolaylı otomatik arttırım
@Rn+ Rn işenene işaretçi olarak kullanılır R birer artırılır.daha sonra b komutları ile 2 şer olarak arttırılır.W komutları
11/- doğrudan modu #N Komutu takip eden kelime doğrudan sabit N’i içerir.direk olmayan otomatik artım modu@ PC +kullanılır
Tablo 5.14. Kaynak ve Hedef Đşlemci Adres Modları
Çoğunlukla örnekler hedef ve kaynak için aynı adresleme modlarını gösteririler.
Kaynağın geçerli kombinasyonlar ve hedef adresleme modları olabilir.
5.12.1. Saklayıcı Mod Aşağıda tanıtılmıştır.
Tablo 5.15. Yazıcı Modun Tanıtımı
Uzunluk :1 veya 2 kelimeli
Đşlem:R10içeriğini R11’e taşır R10 etkilenmeyecek
Açıklama :kaynak ve hedef için geçerli
Örnek: Mov R10 ,R11
Şekil 5.9.Saklayıcı Moduna Örnek
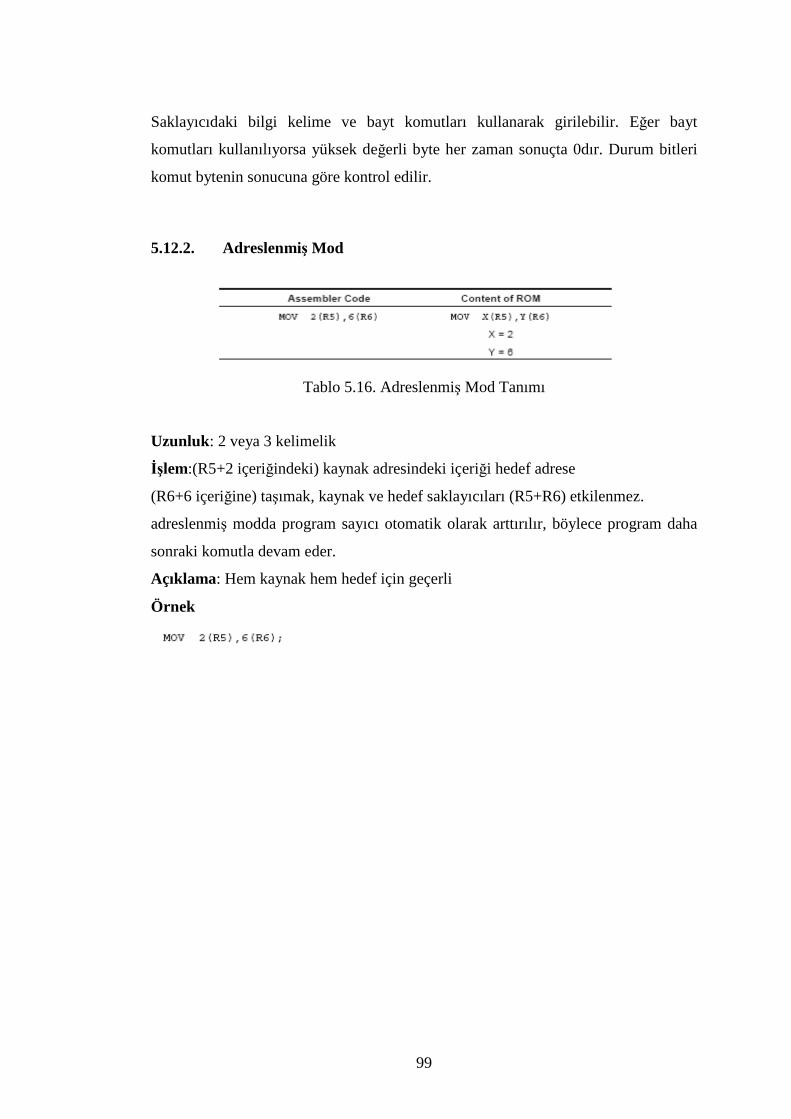
99
Saklayıcıdaki bilgi kelime ve bayt komutları kullanarak girilebilir. Eğer bayt
komutları kullanılıyorsa yüksek değerli byte her zaman sonuçta 0dır. Durum bitleri
komut bytenin sonucuna göre kontrol edilir.
5.12.2. Adreslenmiş Mod
Tablo 5.16. Adreslenmiş Mod Tanımı
Uzunluk: 2 veya 3 kelimelik
Đşlem:(R5+2 içeriğindeki) kaynak adresindeki içeriği hedef adrese
(R6+6 içeriğine) taşımak, kaynak ve hedef saklayıcıları (R5+R6) etkilenmez.
adreslenmiş modda program sayıcı otomatik olarak arttırılır, böylece program daha
sonraki komutla devam eder.
Açıklama: Hem kaynak hem hedef için geçerli
Örnek
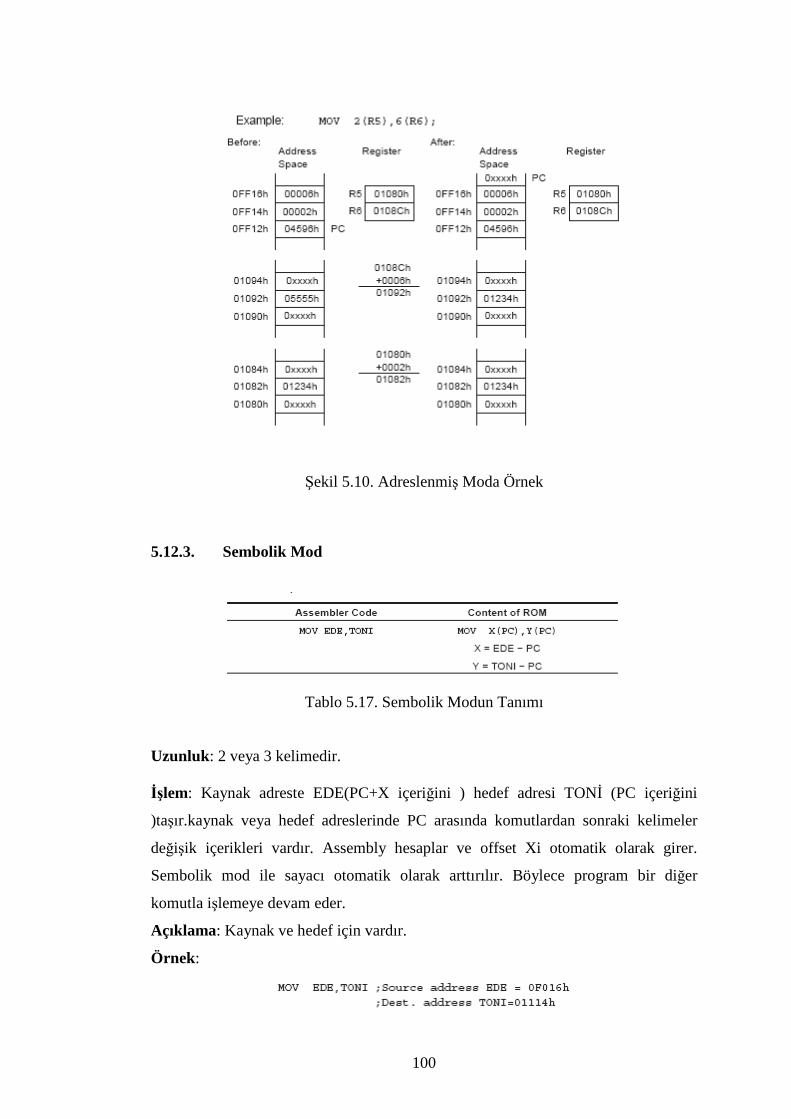
100
Şekil 5.10. Adreslenmiş Moda Örnek
5.12.3. Sembolik Mod
Tablo 5.17. Sembolik Modun Tanımı
Uzunluk: 2 veya 3 kelimedir. Đşlem: Kaynak adreste EDE(PC+X içeriğini ) hedef adresi TONĐ (PC içeriğini
)taşır.kaynak veya hedef adreslerinde PC arasında komutlardan sonraki kelimeler
değişik içerikleri vardır. Assembly hesaplar ve offset Xi otomatik olarak girer.
Sembolik mod ile sayacı otomatik olarak arttırılır. Böylece program bir diğer
komutla işlemeye devam eder.
Açıklama: Kaynak ve hedef için vardır.
Örnek:
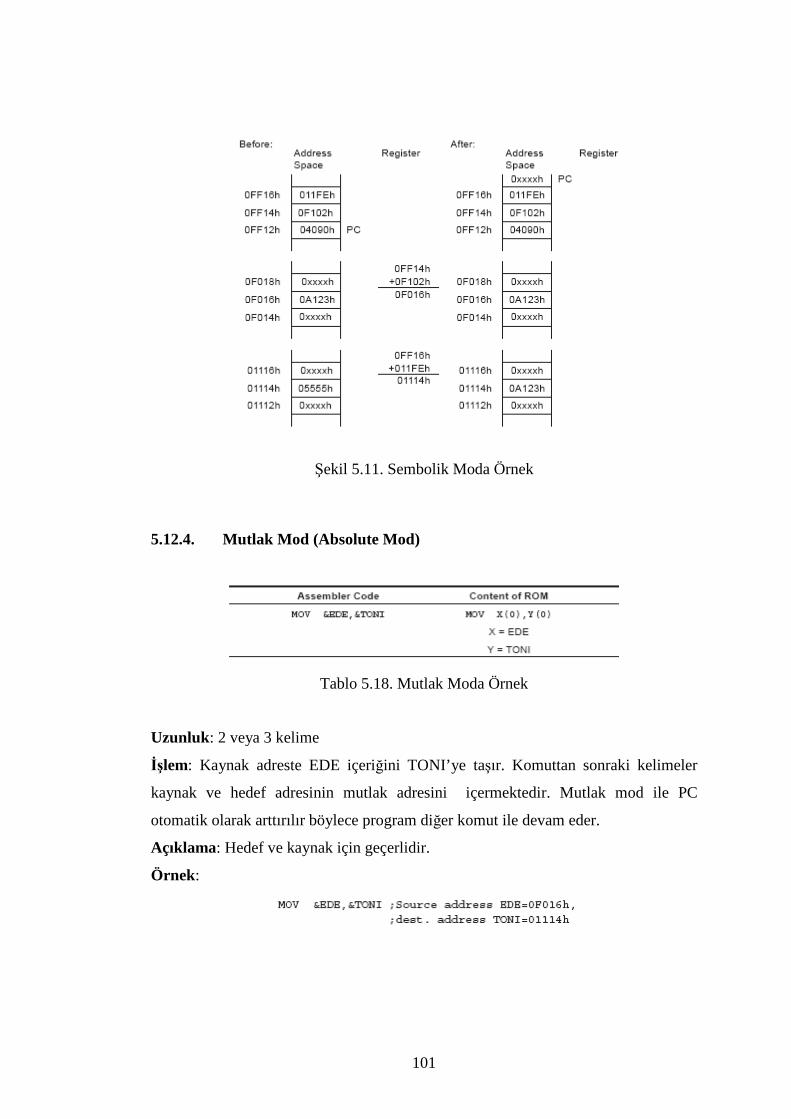
101
Şekil 5.11. Sembolik Moda Örnek
5.12.4. Mutlak Mod (Absolute Mod)
Tablo 5.18. Mutlak Moda Örnek
Uzunluk: 2 veya 3 kelime
Đşlem: Kaynak adreste EDE içeriğini TONI’ye taşır. Komuttan sonraki kelimeler
kaynak ve hedef adresinin mutlak adresini içermektedir. Mutlak mod ile PC
otomatik olarak arttırılır böylece program diğer komut ile devam eder.
Açıklama: Hedef ve kaynak için geçerlidir.
Örnek:
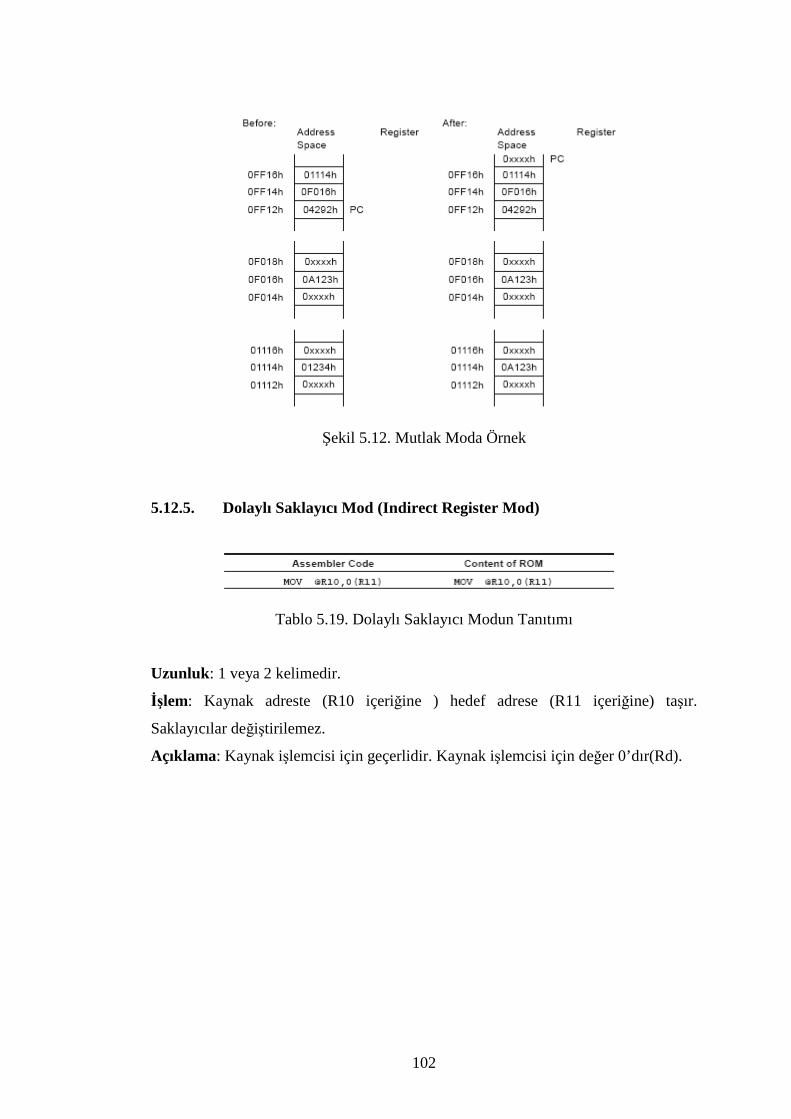
102
Şekil 5.12. Mutlak Moda Örnek
5.12.5. Dolaylı Saklayıcı Mod (Indirect Register Mod)
Tablo 5.19. Dolaylı Saklayıcı Modun Tanıtımı
Uzunluk: 1 veya 2 kelimedir.
Đşlem: Kaynak adreste (R10 içeriğine ) hedef adrese (R11 içeriğine) taşır.
Saklayıcılar değiştirilemez.
Açıklama: Kaynak işlemcisi için geçerlidir. Kaynak işlemcisi için değer 0’dır(Rd).
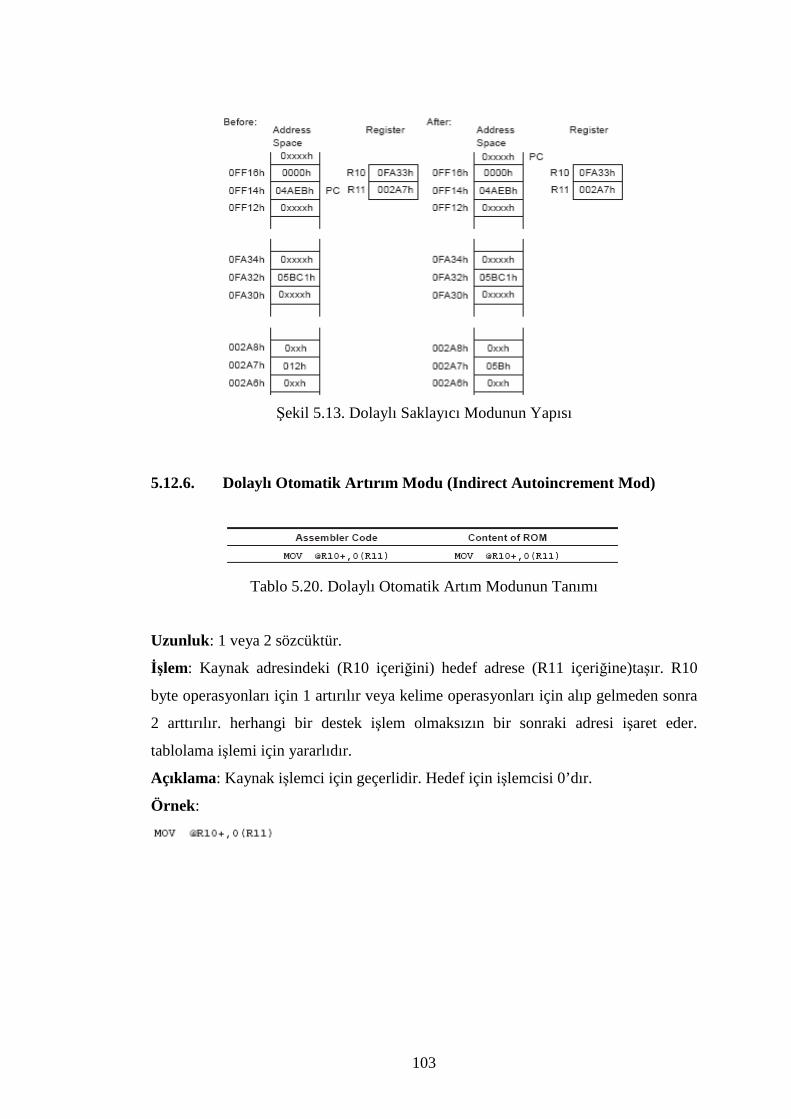
103
Şekil 5.13. Dolaylı Saklayıcı Modunun Yapısı
5.12.6. Dolaylı Otomatik Artırım Modu (Indirect Autoincreme nt Mod)
Tablo 5.20. Dolaylı Otomatik Artım Modunun Tanımı
Uzunluk: 1 veya 2 sözcüktür.
Đşlem: Kaynak adresindeki (R10 içeriğini) hedef adrese (R11 içeriğine)taşır. R10
byte operasyonları için 1 artırılır veya kelime operasyonları için alıp gelmeden sonra
2 arttırılır. herhangi bir destek işlem olmaksızın bir sonraki adresi işaret eder.
tablolama işlemi için yararlıdır.
Açıklama: Kaynak işlemci için geçerlidir. Hedef için işlemcisi 0’dır.
Örnek:
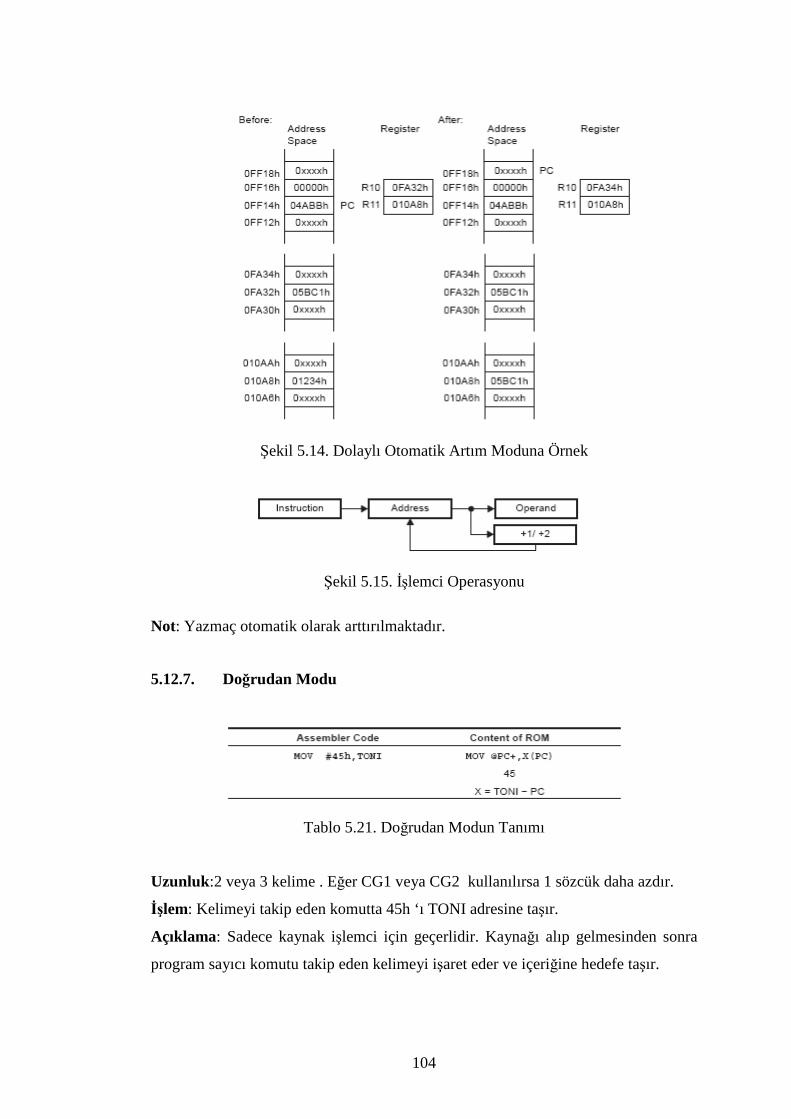
104
Şekil 5.14. Dolaylı Otomatik Artım Moduna Örnek
Şekil 5.15. Đşlemci Operasyonu
Not: Yazmaç otomatik olarak arttırılmaktadır.
5.12.7. Doğrudan Modu
Tablo 5.21. Doğrudan Modun Tanımı
Uzunluk:2 veya 3 kelime . Eğer CG1 veya CG2 kullanılırsa 1 sözcük daha azdır.
Đşlem: Kelimeyi takip eden komutta 45h ‘ı TONI adresine taşır.
Açıklama: Sadece kaynak işlemci için geçerlidir. Kaynağı alıp gelmesinden sonra
program sayıcı komutu takip eden kelimeyi işaret eder ve içeriğine hedefe taşır.
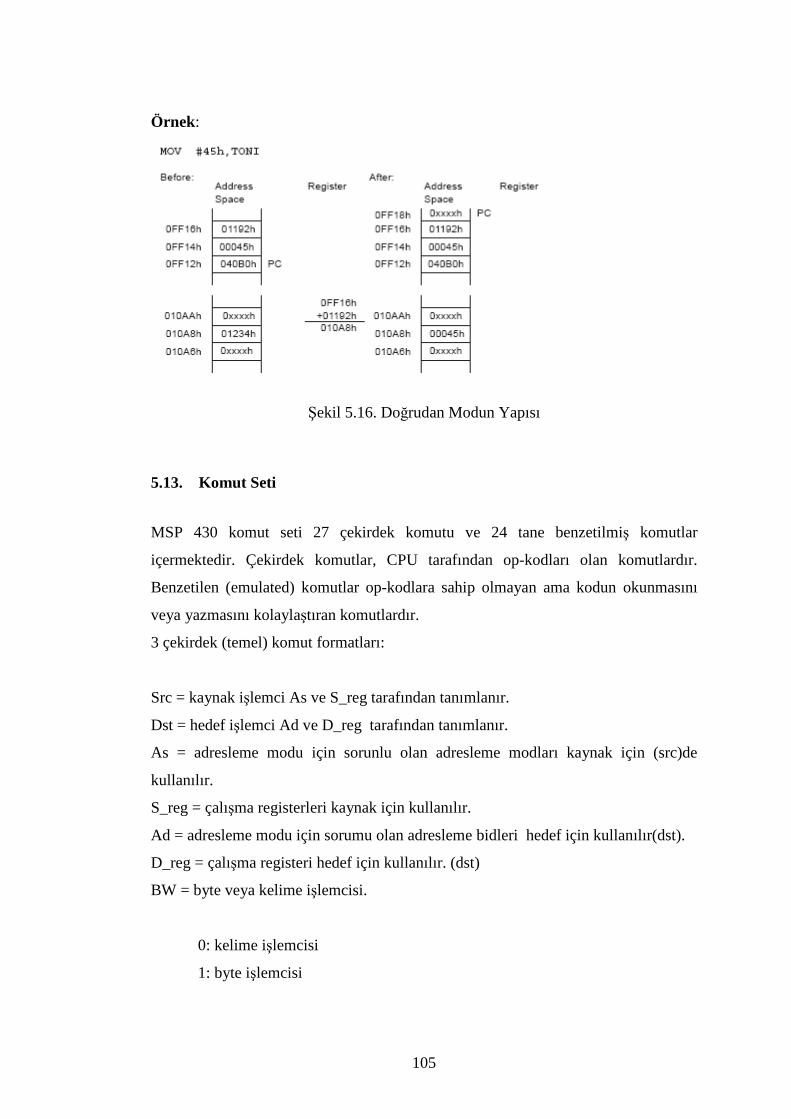
105
Örnek:
Şekil 5.16. Doğrudan Modun Yapısı
5.13. Komut Seti
MSP 430 komut seti 27 çekirdek komutu ve 24 tane benzetilmiş komutlar
içermektedir. Çekirdek komutlar, CPU tarafından op-kodları olan komutlardır.
Benzetilen (emulated) komutlar op-kodlara sahip olmayan ama kodun okunmasını
veya yazmasını kolaylaştıran komutlardır.
3 çekirdek (temel) komut formatları:
Src = kaynak işlemci As ve S_reg tarafından tanımlanır.
Dst = hedef işlemci Ad ve D_reg tarafından tanımlanır.
As = adresleme modu için sorunlu olan adresleme modları kaynak için (src)de
kullanılır.
S_reg = çalışma registerleri kaynak için kullanılır.
Ad = adresleme modu için sorumu olan adresleme bidleri hedef için kullanılır(dst).
D_reg = çalışma registeri hedef için kullanılır. (dst)
BW = byte veya kelime işlemcisi.
0: kelime işlemcisi
1: byte işlemcisi
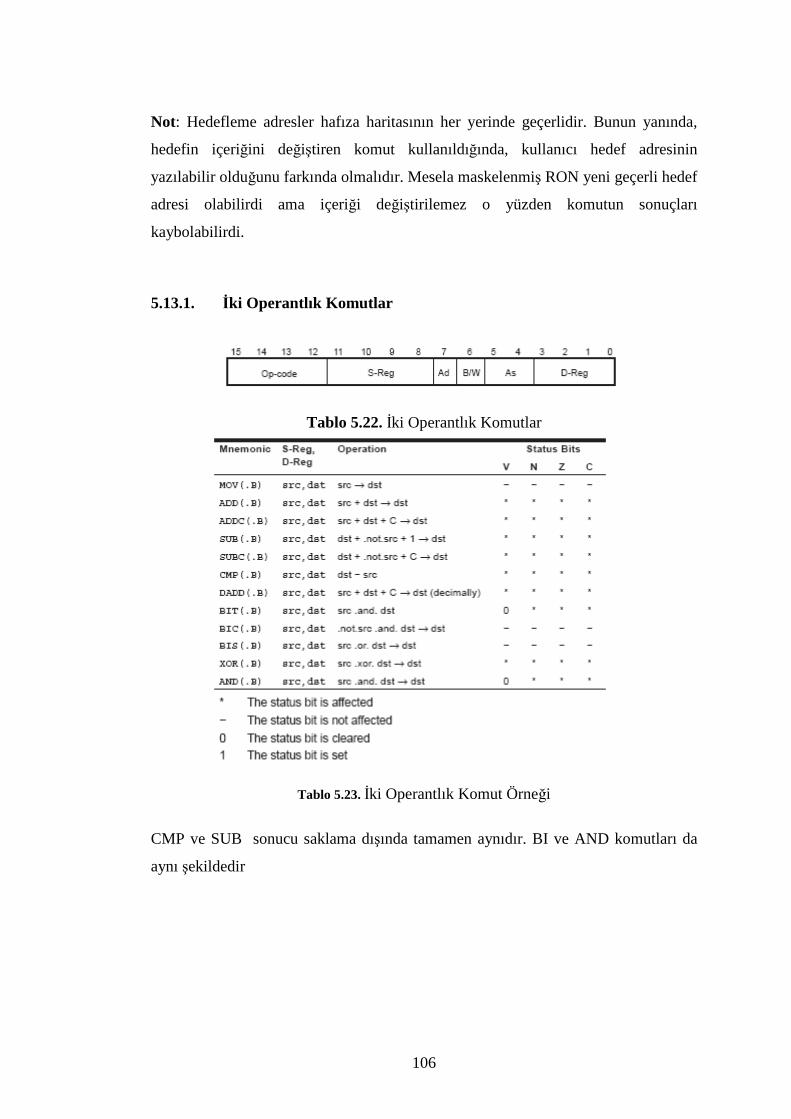
106
Not: Hedefleme adresler hafıza haritasının her yerinde geçerlidir. Bunun yanında,
hedefin içeriğini değiştiren komut kullanıldığında, kullanıcı hedef adresinin
yazılabilir olduğunu farkında olmalıdır. Mesela maskelenmiş RON yeni geçerli hedef
adresi olabilirdi ama içeriği değiştirilemez o yüzden komutun sonuçları
kaybolabilirdi.
5.13.1. Đki Operantlık Komutlar
Tablo 5.22. Đki Operantlık Komutlar
Tablo 5.23. Đki Operantlık Komut Örneği
CMP ve SUB sonucu saklama dışında tamamen aynıdır. BI ve AND komutları da
aynı şekildedir
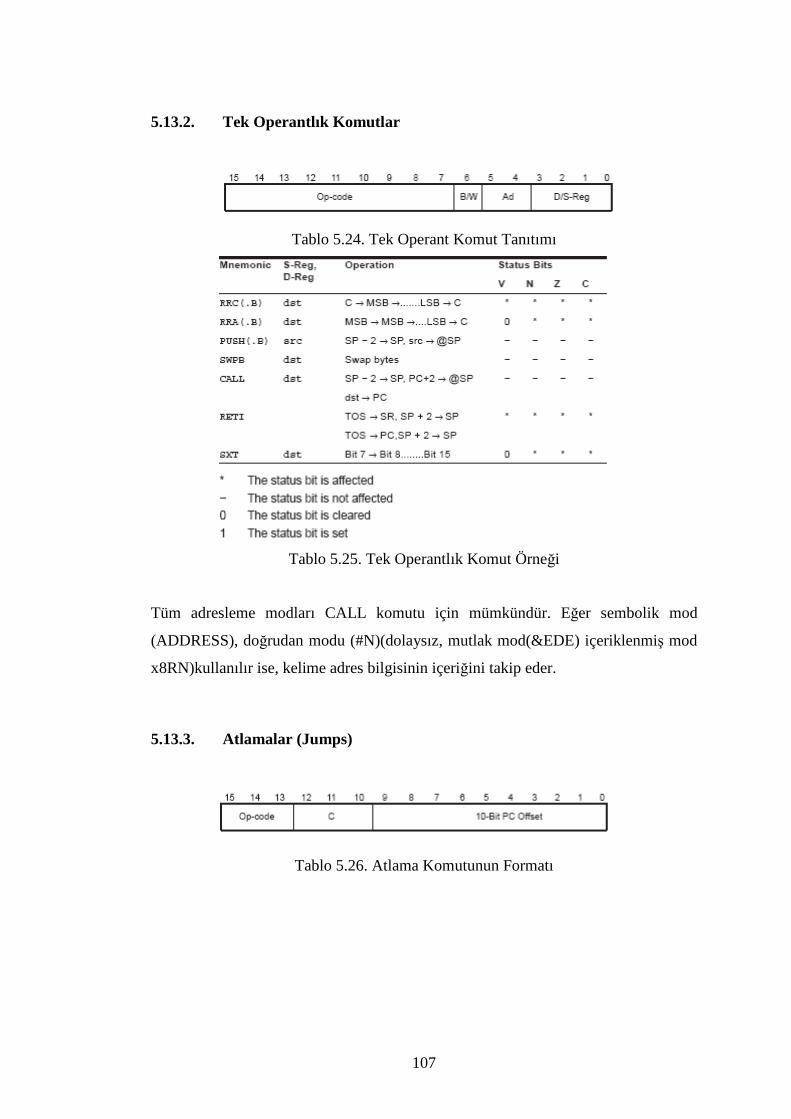
107
5.13.2. Tek Operantlık Komutlar
Tablo 5.24. Tek Operant Komut Tanıtımı
Tablo 5.25. Tek Operantlık Komut Örneği
Tüm adresleme modları CALL komutu için mümkündür. Eğer sembolik mod
(ADDRESS), doğrudan modu (#N)(dolaysız, mutlak mod(&EDE) içeriklenmiş mod
x8RN)kullanılır ise, kelime adres bilgisinin içeriğini takip eder.
5.13.3. Atlamalar (Jumps)
Tablo 5.26. Atlama Komutunun Formatı
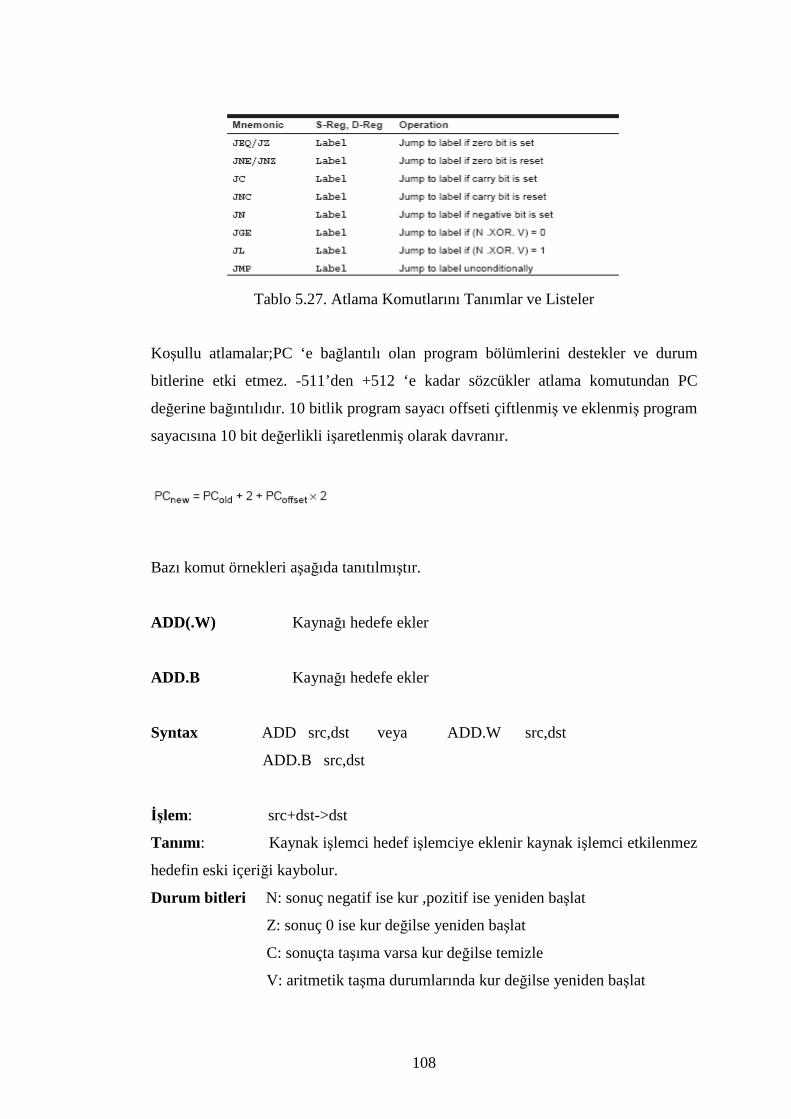
108
Tablo 5.27. Atlama Komutlarını Tanımlar ve Listeler
Koşullu atlamalar;PC ‘e bağlantılı olan program bölümlerini destekler ve durum
bitlerine etki etmez. -511’den +512 ‘e kadar sözcükler atlama komutundan PC
değerine bağıntılıdır. 10 bitlik program sayacı offseti çiftlenmiş ve eklenmiş program
sayacısına 10 bit değerlikli i şaretlenmiş olarak davranır.
Bazı komut örnekleri aşağıda tanıtılmıştır.
ADD(.W) Kaynağı hedefe ekler
ADD.B Kaynağı hedefe ekler
Syntax ADD src,dst veya ADD.W src,dst
ADD.B src,dst
Đşlem: src+dst->dst
Tanımı: Kaynak işlemci hedef işlemciye eklenir kaynak işlemci etkilenmez
hedefin eski içeriği kaybolur.
Durum bitleri N: sonuç negatif ise kur ,pozitif ise yeniden başlat
Z: sonuç 0 ise kur değilse yeniden başlat
C: sonuçta taşıma varsa kur değilse temizle
V: aritmetik taşma durumlarında kur değilse yeniden başlat
109
Örnek: R5 10 artırılsın, taşımada TONĐ’ye atlama için kullanılır.
ADD #10,R5
JC TONĐ :taşıma oluşmuş
… :taşıma olmamış
Örnek: R5 10 artırılsın ,taşımada TONI’ye atlama için kullanılır.
ADD #10,R5 R5 in düşük değerli bitine 10 ekler
JC TONĐ :eğer(R5)>246(0Ah+0F6h)
…. :taşıma yoktur.
BIC(.W) hedefteki bitleri temizler
BIC .B hedefteki bitleri temizler
Syntax BIC src,dst veya BIC.W src,dst
BIC.B src,dst
Tanımı: Hedef içine sonuçlar yerleştirilir. Durum bitleri etkilenmez. Mod bitleri
OSCOFF,CPUOFF ve GIE etkilenmez.
Örnek: RAM ın LEO kelimesinin 6 MSB leri temizlenir.
BIC #0FC00h,LEO ;MEM(LEO)daki 6 MSB leri
temizlenir
Örnek: RAM ın LEO kelimesinin 5 MSB leri temizlenir.
BIC .B #0F8h,LEO ;RAM byte LEO nun 5 MSBleri
temizlenir
CLR(W) hedefteki bitleri temizler.
CLRB hedefteki bitleri temizler.
110
Syntax CLR dst or CLR.W dst
CLR.B dst
Đşlem: 0 dst
Değişme MOV #0,dst
MOV.B #0,dst
Tanımı: hedef işlemci temizlenir.
Durum bitleri etkilenmez
Örnek: RAM sözcüğü TONĐ temizlenir
CLR TONĐ ;0 TONĐ
Örnek: R5 registeri temizlenir
CLR R5
Örnek: RAM byte TONĐ temizlenir
CLR.B TONI ;0 TONI
5.14. C VE ASSEMBLY ile MSP430
C ve assembly kodu birlikte MSB 430 uygulamalarında kullanılabilir. C ve assembly
kombinasyonlarının assembly düşük düzey kontrolü, etkinlik, yüksek düzey dili,
gücü ve hızı sayesinde kullanıcı faydalı olmaktadır. Complier(derleyici)saklayıcı
işlemcilerinin iki grubunu kullanır.
• 1, saklayıcı ile R2 den R15 parametre geçişinde kullanılır. Bundan dolayı
çağrı sırasında muhafaza edilmezler.
• Diğer amaçlı saklayıcılar, R4 ve R11 genel olarak saklayıcılar değişkenleri
geçici olarak sonuçlar için kullanılır ve de çağrı sırasında saklanılır. Bu
durum C ile kontrol edilir. URR45 seçeneği derleyicisi R4 ve/veya R4
saklayıcılarının kullanımında korunma amaçlıdır.
111
• Yığın çerçevesi ve parametre geçişi
• Parametreler
• Đlk iki dışında
• Dönüş adresi
• Yüksek değerlikli adresler
• Düşük değerlikli adresler
• Yığın işaretleyicisi SP
• Yığın
5.14.1. C’den Parametre Geçişi
Çağrılmış fonksiyon parametreleri olağan geçişi sağdan sola doğrudur. Yapı veya
bağlantı tipi olarak tanımlanmadıkça saklayıcılardaki en soldan parametreler
geçirilirler ayrıca yığındakilerde geçirilir. Kalan parametreler her zaman yığın
üzerinden geçirilirler . Aşağıda örnekte gösterilmişlerdir f(w,x,y,z).
Uygulamalar sağdan sola sırasıyla uğraştığından beri Z yığın üzerine ilk yüklenir.
Daha sonra,X R14 ,R15:R14 veya yığın üzerinde, çeşidine bağlı olarak, W de aynı
şekildedir. Sonuçlar R12 veya (R13 = R12 32 bit için) ve eğer yapısal ise R12
tarafından özel yer belirlenir.
5.14.2. Kesme Fonksiyonları
C de yazılan kesme fonksiyonları otomatik olarak ilk önceki saklayıcıların, SR(status
register), R14 ve R15 saklayıcıları muhafaza etmektedir. Rutin olarak kullanılan
herhangi saklayıcı push Rxx komutları kullanılarak saklanırlar. Çıkışta pop Rxx
komutları ile tekrar geri alınırlar. RETI komutu durum saklayıcısı tekrar yüklemek
için ve kesmeden dönüşte kullanılır.
C’den çağrılması ile kesme servis rutini sırasında dönüş adresi ile durum saklayıcısı
yığında depolanır.
112
C den yığın işaretçisine direkt olarak giriş mümkün değildir ama esas fonksiyonları
BIC_SR_IRQ(bitleri) yığın üzerinde durum saklayıcısı kaydı değiştirilebilir. 1,25
versiyonundan itibaren başlayarak IAR’da bulunmaktadır.
#include <msp430x11x1.h>
void main(void)
...
_EINT(); // Enable interrupts
while(1)
...
_BIS_SR(LPM3_bits); // Enter LPM3
...
interrupt[WDT_VECTOR] void watchdog_timer (void)
_BIC_SR_IRQ(LPM3_bits); // Clear LPM3 bits from saved SR on Stack
5.14.3. C’den Çağrılmı ş Assembly Rutinler
• Yukarıda anlatılan çağrı geleneğine uyulmalıdır.
• Kamusal giriş işaret etiketi olmalıdır.
• Harici parametrelerin promosyon seçeneğine ve çeşit kontrolüne yani harici
intfoo()da veya harici intfoo(int1 int3)izin vererek harici çağrıdan önce
bildirimi sağlamalıdır.
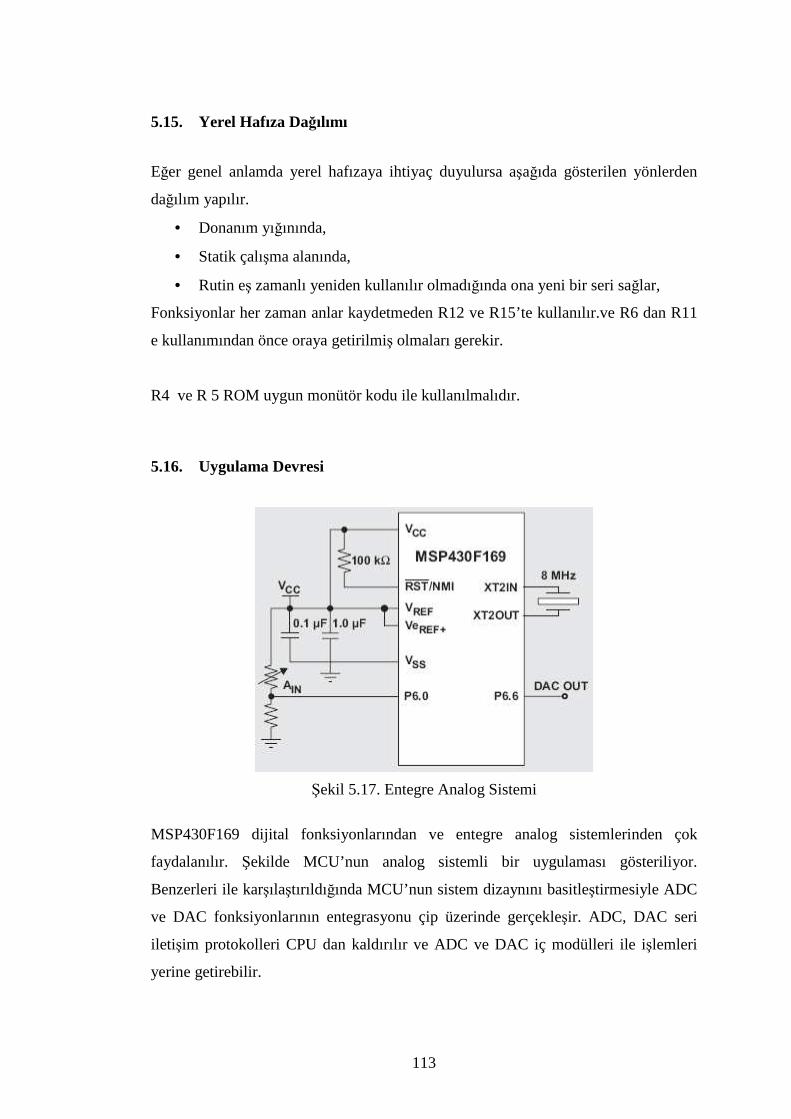
113
5.15. Yerel Hafıza Dağılımı
Eğer genel anlamda yerel hafızaya ihtiyaç duyulursa aşağıda gösterilen yönlerden
dağılım yapılır.
• Donanım yığınında,
• Statik çalışma alanında,
• Rutin eş zamanlı yeniden kullanılır olmadığında ona yeni bir seri sağlar,
Fonksiyonlar her zaman anlar kaydetmeden R12 ve R15’te kullanılır.ve R6 dan R11
e kullanımından önce oraya getirilmiş olmaları gerekir.
R4 ve R 5 ROM uygun monütör kodu ile kullanılmalıdır.
5.16. Uygulama Devresi
Şekil 5.17. Entegre Analog Sistemi
MSP430F169 dijital fonksiyonlarından ve entegre analog sistemlerinden çok
faydalanılır. Şekilde MCU’nun analog sistemli bir uygulaması gösteriliyor.
Benzerleri ile karşılaştırıldığında MCU’nun sistem dizaynını basitleştirmesiyle ADC
ve DAC fonksiyonlarının entegrasyonu çip üzerinde gerçekleşir. ADC, DAC seri
iletişim protokolleri CPU dan kaldırılır ve ADC ve DAC iç modülleri ile işlemleri
yerine getirebilir.
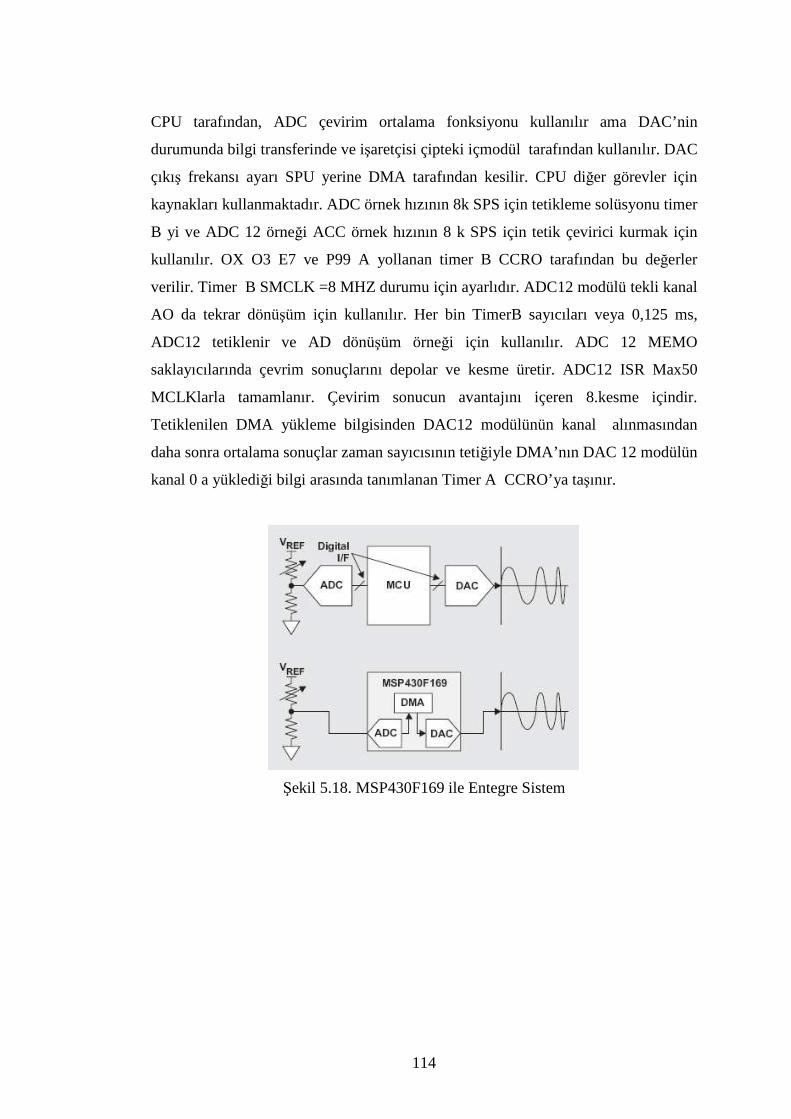
114
CPU tarafından, ADC çevirim ortalama fonksiyonu kullanılır ama DAC’nin
durumunda bilgi transferinde ve işaretçisi çipteki içmodül tarafından kullanılır. DAC
çıkış frekansı ayarı SPU yerine DMA tarafından kesilir. CPU diğer görevler için
kaynakları kullanmaktadır. ADC örnek hızının 8k SPS için tetikleme solüsyonu timer
B yi ve ADC 12 örneği ACC örnek hızının 8 k SPS için tetik çevirici kurmak için
kullanılır. OX O3 E7 ve P99 A yollanan timer B CCRO tarafından bu değerler
verilir. Timer B SMCLK =8 MHZ durumu için ayarlıdır. ADC12 modülü tekli kanal
AO da tekrar dönüşüm için kullanılır. Her bin TimerB sayıcıları veya 0,125 ms,
ADC12 tetiklenir ve AD dönüşüm örneği için kullanılır. ADC 12 MEMO
saklayıcılarında çevrim sonuçlarını depolar ve kesme üretir. ADC12 ISR Max50
MCLKlarla tamamlanır. Çevirim sonucun avantajını içeren 8.kesme içindir.
Tetiklenilen DMA yükleme bilgisinden DAC12 modülünün kanal alınmasından
daha sonra ortalama sonuçlar zaman sayıcısının tetiğiyle DMA’nın DAC 12 modülün
kanal 0 a yüklediği bilgi arasında tanımlanan Timer A CCRO’ya taşınır.
Şekil 5.18. MSP430F169 ile Entegre Sistem
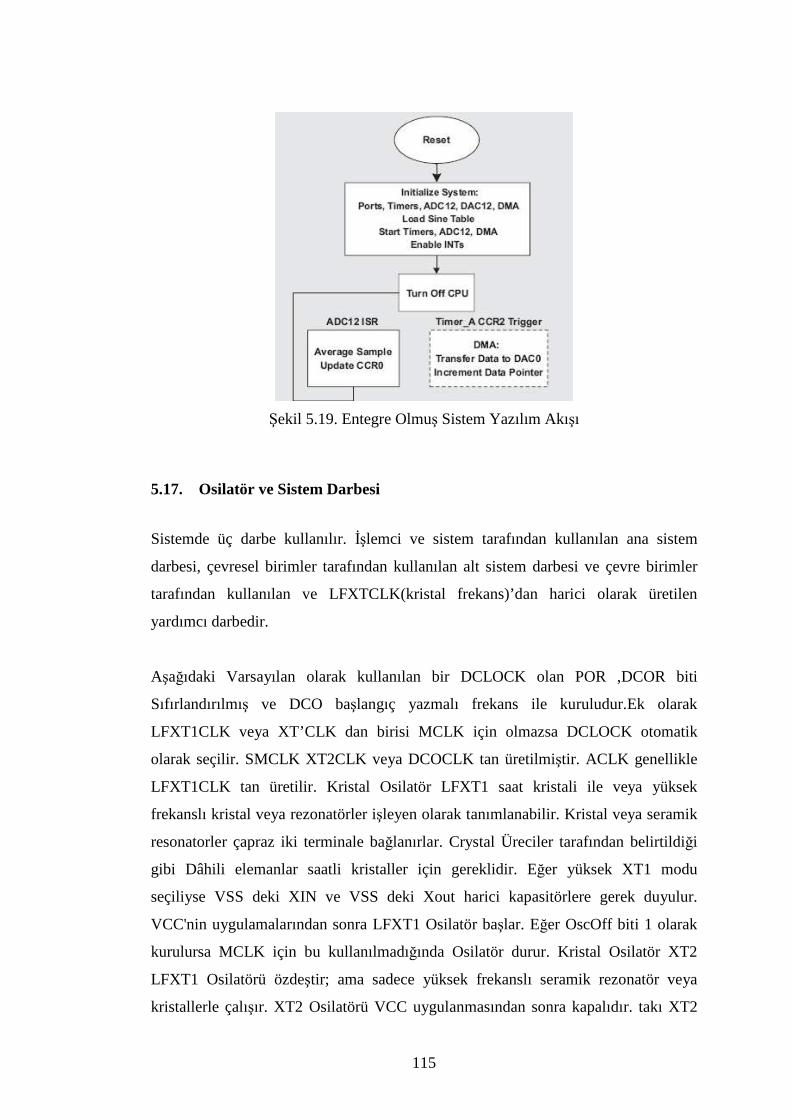
115
Şekil 5.19. Entegre Olmuş Sistem Yazılım Akışı
5.17. Osilatör ve Sistem Darbesi
Sistemde üç darbe kullanılır. Đşlemci ve sistem tarafından kullanılan ana sistem
darbesi, çevresel birimler tarafından kullanılan alt sistem darbesi ve çevre birimler
tarafından kullanılan ve LFXTCLK(kristal frekans)’dan harici olarak üretilen
yardımcı darbedir.
Aşağıdaki Varsayılan olarak kullanılan bir DCLOCK olan POR ,DCOR biti
Sıfırlandırılmış ve DCO başlangıç yazmalı frekans ile kuruludur.Ek olarak
LFXT1CLK veya XT’CLK dan birisi MCLK için olmazsa DCLOCK otomatik
olarak seçilir. SMCLK XT2CLK veya DCOCLK tan üretilmiştir. ACLK genellikle
LFXT1CLK tan üretilir. Kristal Osilatör LFXT1 saat kristali ile veya yüksek
frekanslı kristal veya rezonatörler işleyen olarak tanımlanabilir. Kristal veya seramik
resonatorler çapraz iki terminale bağlanırlar. Crystal Üreciler tarafından belirtildiği
gibi Dâhili elemanlar saatli kristaller için gereklidir. Eğer yüksek XT1 modu
seçiliyse VSS deki XIN ve VSS deki Xout harici kapasitörlere gerek duyulur.
VCC'nin uygulamalarından sonra LFXT1 Osilatör başlar. Eğer OscOff biti 1 olarak
kurulursa MCLK için bu kullanılmadığında Osilatör durur. Kristal Osilatör XT2
LFXT1 Osilatörü özdeştir; ama sadece yüksek frekanslı seramik rezonatör veya
kristallerle çalışır. XT2 Osilatörü VCC uygulanmasından sonra kapalıdır. takı XT2
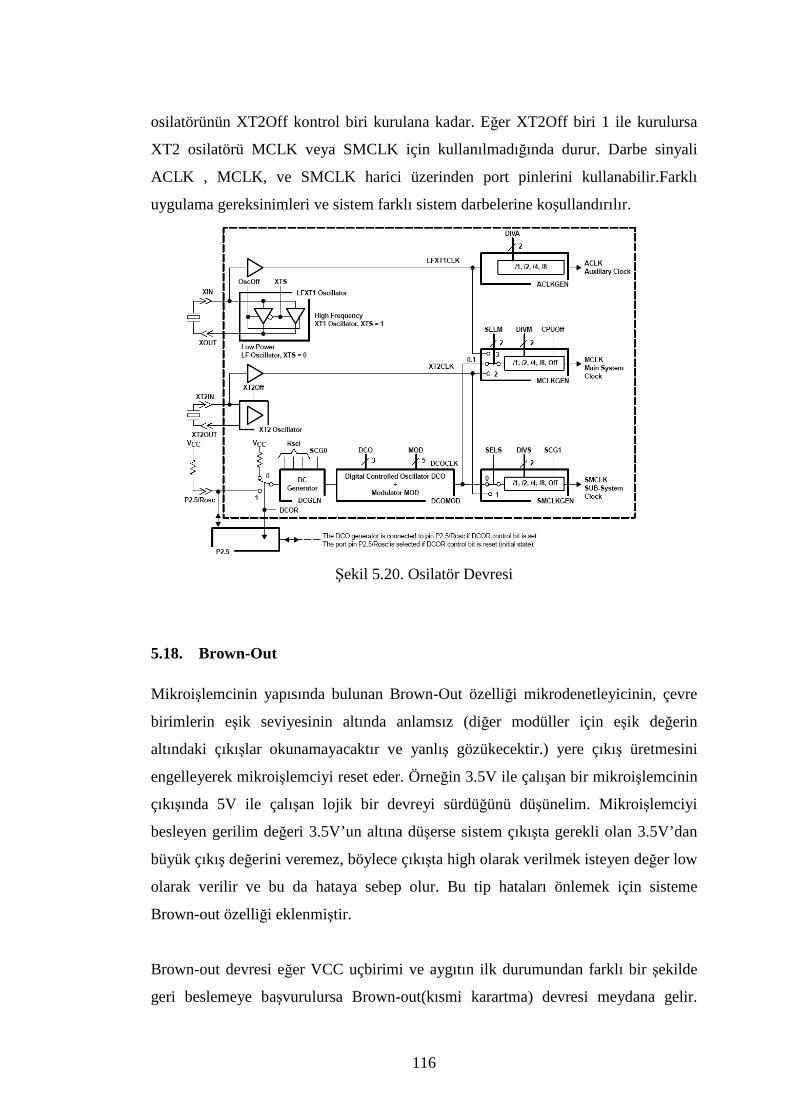
116
osilatörünün XT2Off kontrol biri kurulana kadar. Eğer XT2Off biri 1 ile kurulursa
XT2 osilatörü MCLK veya SMCLK için kullanılmadığında durur. Darbe sinyali
ACLK , MCLK, ve SMCLK harici üzerinden port pinlerini kullanabilir.Farklı
uygulama gereksinimleri ve sistem farklı sistem darbelerine koşullandırılır.
Şekil 5.20. Osilatör Devresi
5.18. Brown-Out Mikroişlemcinin yapısında bulunan Brown-Out özelliği mikrodenetleyicinin, çevre
birimlerin eşik seviyesinin altında anlamsız (diğer modüller için eşik değerin
altındaki çıkışlar okunamayacaktır ve yanlış gözükecektir.) yere çıkış üretmesini
engelleyerek mikroişlemciyi reset eder. Örneğin 3.5V ile çalışan bir mikroişlemcinin
çıkışında 5V ile çalışan lojik bir devreyi sürdüğünü düşünelim. Mikroişlemciyi
besleyen gerilim değeri 3.5V’un altına düşerse sistem çıkışta gerekli olan 3.5V’dan
büyük çıkış değerini veremez, böylece çıkışta high olarak verilmek isteyen değer low
olarak verilir ve bu da hataya sebep olur. Bu tip hataları önlemek için sisteme
Brown-out özelliği eklenmiştir.
Brown-out devresi eğer VCC uçbirimi ve aygıtın ilk durumundan farklı bir şekilde
geri beslemeye başvurulursa Brown-out(kısmi karartma) devresi meydana gelir.
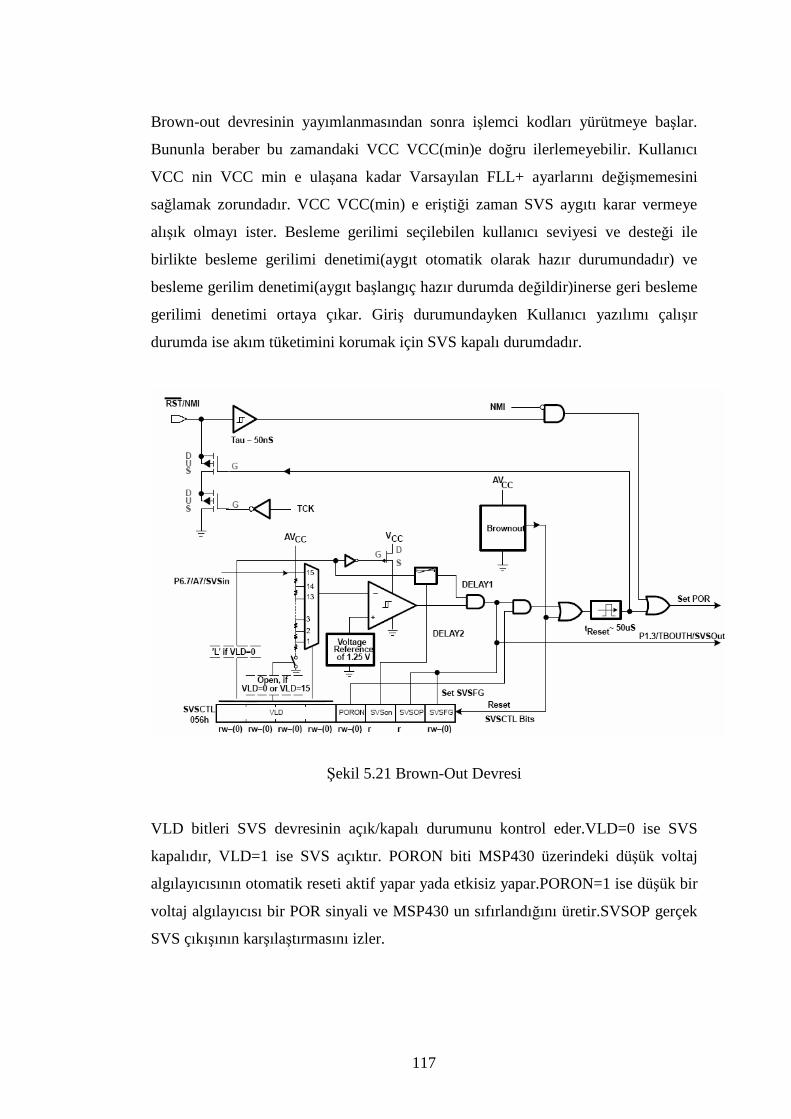
117
Brown-out devresinin yayımlanmasından sonra işlemci kodları yürütmeye başlar.
Bununla beraber bu zamandaki VCC VCC(min)e doğru ilerlemeyebilir. Kullanıcı
VCC nin VCC min e ulaşana kadar Varsayılan FLL+ ayarlarını değişmemesini
sağlamak zorundadır. VCC VCC(min) e eriştiği zaman SVS aygıtı karar vermeye
alışık olmayı ister. Besleme gerilimi seçilebilen kullanıcı seviyesi ve desteği ile
birlikte besleme gerilimi denetimi(aygıt otomatik olarak hazır durumundadır) ve
besleme gerilim denetimi(aygıt başlangıç hazır durumda değildir)inerse geri besleme
gerilimi denetimi ortaya çıkar. Giriş durumundayken Kullanıcı yazılımı çalışır
durumda ise akım tüketimini korumak için SVS kapalı durumdadır.
Şekil 5.21 Brown-Out Devresi
VLD bitleri SVS devresinin açık/kapalı durumunu kontrol eder.VLD=0 ise SVS
kapalıdır, VLD=1 ise SVS açıktır. PORON biti MSP430 üzerindeki düşük voltaj
algılayıcısının otomatik reseti aktif yapar yada etkisiz yapar.PORON=1 ise düşük bir
voltaj algılayıcısı bir POR sinyali ve MSP430 un sıfırlandığını üretir.SVSOP gerçek
SVS çıkışının karşılaştırmasını izler.
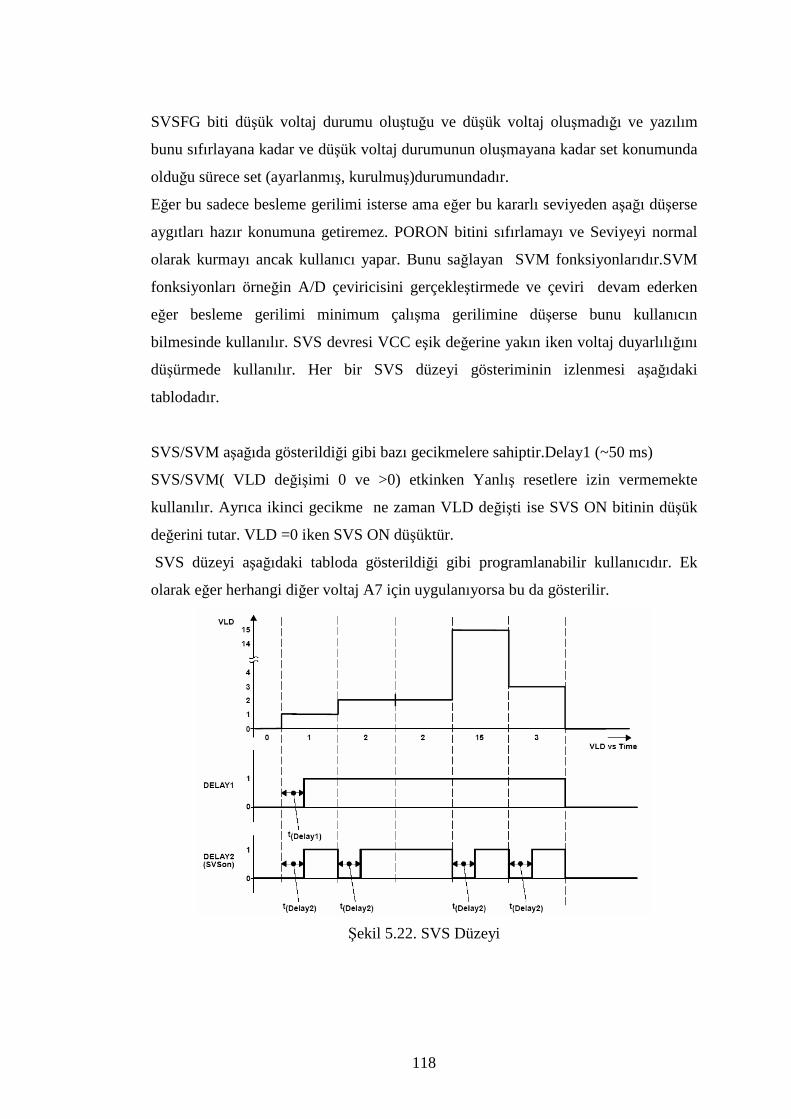
118
SVSFG biti düşük voltaj durumu oluştuğu ve düşük voltaj oluşmadığı ve yazılım
bunu sıfırlayana kadar ve düşük voltaj durumunun oluşmayana kadar set konumunda
olduğu sürece set (ayarlanmış, kurulmuş)durumundadır.
Eğer bu sadece besleme gerilimi isterse ama eğer bu kararlı seviyeden aşağı düşerse
aygıtları hazır konumuna getiremez. PORON bitini sıfırlamayı ve Seviyeyi normal
olarak kurmayı ancak kullanıcı yapar. Bunu sağlayan SVM fonksiyonlarıdır.SVM
fonksiyonları örneğin A/D çeviricisini gerçekleştirmede ve çeviri devam ederken
eğer besleme gerilimi minimum çalışma gerilimine düşerse bunu kullanıcın
bilmesinde kullanılır. SVS devresi VCC eşik değerine yakın iken voltaj duyarlılığını
düşürmede kullanılır. Her bir SVS düzeyi gösteriminin izlenmesi aşağıdaki
tablodadır.
SVS/SVM aşağıda gösterildiği gibi bazı gecikmelere sahiptir.Delay1 (~50 ms)
SVS/SVM( VLD değişimi 0 ve >0) etkinken Yanlış resetlere izin vermemekte
kullanılır. Ayrıca ikinci gecikme ne zaman VLD değişti ise SVS ON bitinin düşük
değerini tutar. VLD =0 iken SVS ON düşüktür.
SVS düzeyi aşağıdaki tabloda gösterildiği gibi programlanabilir kullanıcıdır. Ek
olarak eğer herhangi diğer voltaj A7 için uygulanıyorsa bu da gösterilir.
Şekil 5.22. SVS Düzeyi
119
5.19. Kar şılaştırma Latchleri (TBCLX)
Karşılaştırma mandalları yazılımla yada üzerinden seçilmiş durumları ile direk
olarak PWM’den yüklenebilir.
POR sinyali tarafından resetlenir.
• Load TBCLx doğrudan, CLLD=0: tutma karşılaştırma saklayıcısı CCRx ve
benzer karşılaştırma mandalları aynı anda yüklenir.
• Load TBCLx at Zero, CLLD=1: tutma karşılaştırma saklayıcısındaki veri
benzer karşılaştırma mandallarına yüklenir. (16 bit zamanlayıcı 0’ı
gösterdiğinde)
• Load TBCLx at Zero + Period, CLLD=2: tutma karşılaştırma
saklayıcısındaki veri benzer karşılaştırma mandallarına yüklenir. (16 bit
zamanlayıcı 0’ı gösterdiğinde veya bir sonraki periyot başladığındaki).
• Load TBCLx at EQUx, CLLD=3: tutma karşılaştırma saklayıcısındaki veri
CCRx TBR ye eşit olduğunda yüklenir.
• Karşılaştırma mandalı yüklenirken tek başına yada guruplar halinde
yapılabilir. Seçilmiş yükleme durumu gerçeklendiğinde CCRx datası TBCLx
e yüklenir.
• TBCLGRP=0: seçilmiş yükleme durumu gerçeklendiğinde karşılaştırma
mandalı TBCLx y yüklenir.
• Dual load TBCLx mode,
TBCLGRP=1: veri aynı gurubun her iki CCRx saklayıcına yüklendiğinde ve
seçilmiş yükleme durumu gerçeklendiğinde 2 karşılaştırma mandalı TBCLx yüklenir.
CCR1+CCR2, CCR3+CCR4, and CR5+CCR6.Triple load TBCLx mode,
TBCLGRP=2: veri aynı grubun bütün CCRx saklayıcılarına yüklendiğinde ve
seçilmiş yükleme durumu gerçeklendiğinde 3 karşılaştırmalı mandal yüklenir. Two
groups are defined: CCR1+CCR2+CCR3 and CR4+CCR5+CCR6.
Full load TBCLx mode,
TBCLGRP=3: veri bütün 7 CCRx saklayıcılarına yazıldığında ve seçilmiş yükleme
durumu gerçekleştiğinde 7 karşılaştırma mandalı hepsi yüklenir. Bütün CCRx verisi
benzer karşılaştırma mandallarına eş zamanlı olarak yüklenir.
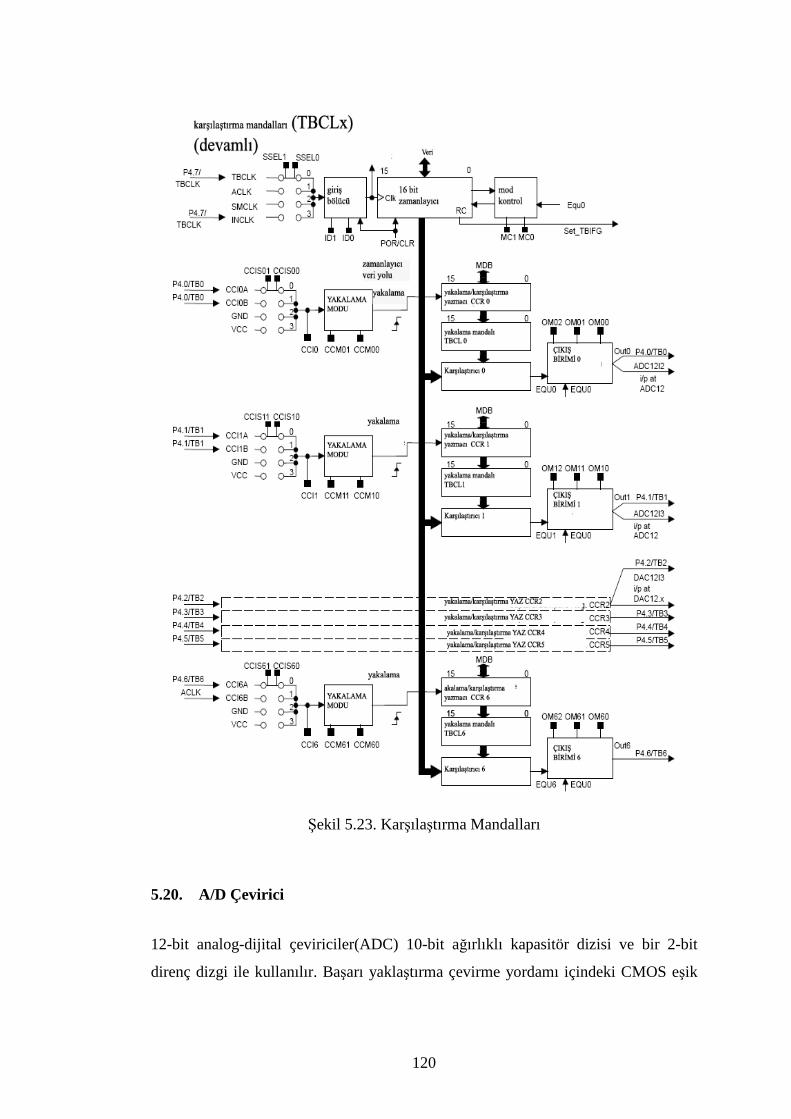
120
Şekil 5.23. Karşılaştırma Mandalları
5.20. A/D Çevirici
12-bit analog-dijital çeviriciler(ADC) 10-bit ağırlıklı kapasitör dizisi ve bir 2-bit
direnç dizgi ile kullanılır. Başarı yaklaştırma çevirme yordamı içindeki CMOS eşik
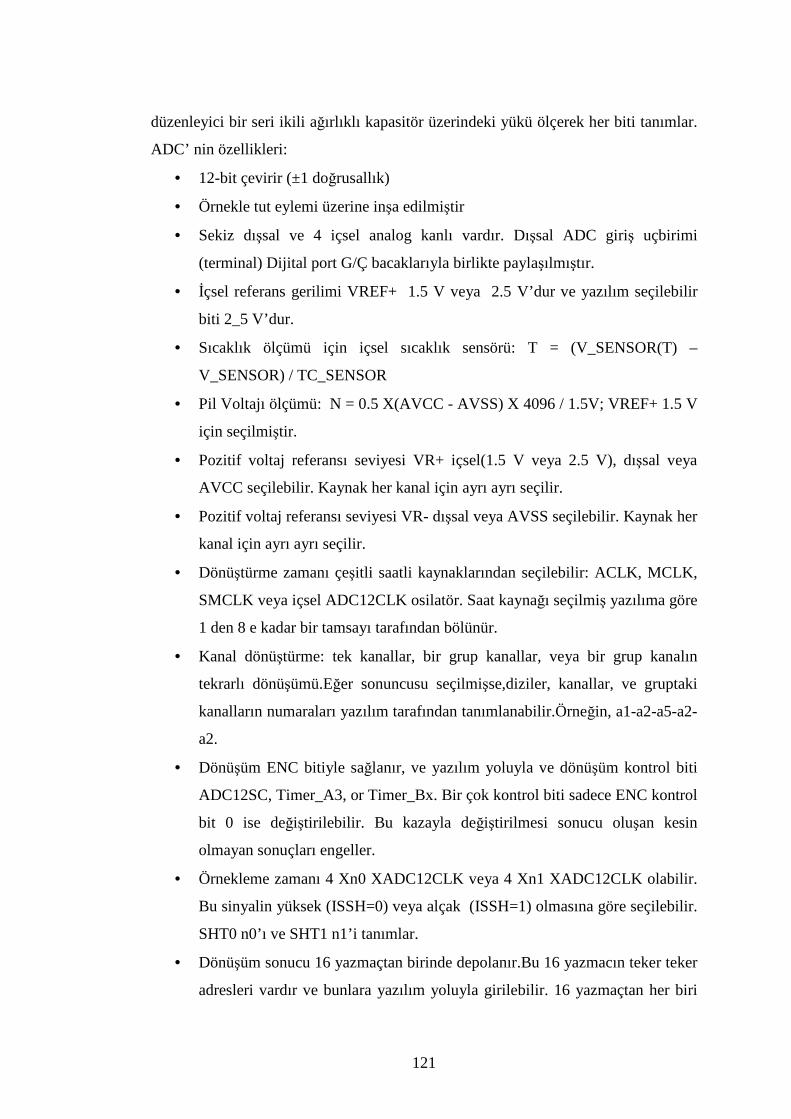
121
düzenleyici bir seri ikili ağırlıklı kapasitör üzerindeki yükü ölçerek her biti tanımlar.
ADC’ nin özellikleri:
• 12-bit çevirir (±1 doğrusallık)
• Örnekle tut eylemi üzerine inşa edilmiştir
• Sekiz dışsal ve 4 içsel analog kanlı vardır. Dışsal ADC giriş uçbirimi
(terminal) Dijital port G/Ç bacaklarıyla birlikte paylaşılmıştır.
• Đçsel referans gerilimi VREF+ 1.5 V veya 2.5 V’dur ve yazılım seçilebilir
biti 2_5 V’dur.
• Sıcaklık ölçümü için içsel sıcaklık sensörü: T = (V_SENSOR(T) –
V_SENSOR) / TC_SENSOR
• Pil Voltajı ölçümü: N = 0.5 X(AVCC - AVSS) X 4096 / 1.5V; VREF+ 1.5 V
için seçilmiştir.
• Pozitif voltaj referansı seviyesi VR+ içsel(1.5 V veya 2.5 V), dışsal veya
AVCC seçilebilir. Kaynak her kanal için ayrı ayrı seçilir.
• Pozitif voltaj referansı seviyesi VR- dışsal veya AVSS seçilebilir. Kaynak her
kanal için ayrı ayrı seçilir.
• Dönüştürme zamanı çeşitli saatli kaynaklarından seçilebilir: ACLK, MCLK,
SMCLK veya içsel ADC12CLK osilatör. Saat kaynağı seçilmiş yazılıma göre
1 den 8 e kadar bir tamsayı tarafından bölünür.
• Kanal dönüştürme: tek kanallar, bir grup kanallar, veya bir grup kanalın
tekrarlı dönüşümü.Eğer sonuncusu seçilmişse,diziler, kanallar, ve gruptaki
kanalların numaraları yazılım tarafından tanımlanabilir.Örneğin, a1-a2-a5-a2-
a2.
• Dönüşüm ENC bitiyle sağlanır, ve yazılım yoluyla ve dönüşüm kontrol biti
ADC12SC, Timer_A3, or Timer_Bx. Bir çok kontrol biti sadece ENC kontrol
bit 0 ise değiştirilebilir. Bu kazayla değiştirilmesi sonucu oluşan kesin
olmayan sonuçları engeller.
• Örnekleme zamanı 4 Xn0 XADC12CLK veya 4 Xn1 XADC12CLK olabilir.
Bu sinyalin yüksek (ISSH=0) veya alçak (ISSH=1) olmasına göre seçilebilir.
SHT0 n0’ı ve SHT1 n1’i tanımlar.
• Dönüşüm sonucu 16 yazmaçtan birinde depolanır.Bu 16 yazmacın teker teker
adresleri vardır ve bunlara yazılım yoluyla girilebilir. 16 yazmaçtan her biri
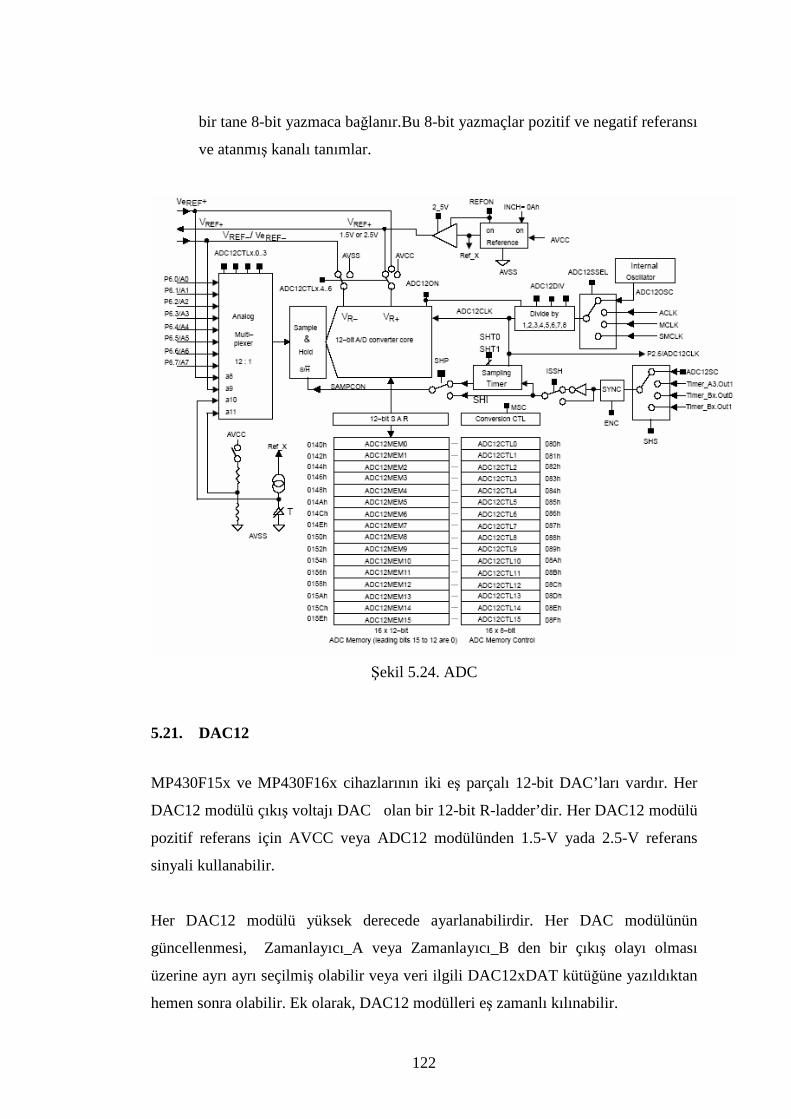
122
bir tane 8-bit yazmaca bağlanır.Bu 8-bit yazmaçlar pozitif ve negatif referansı
ve atanmış kanalı tanımlar.
Şekil 5.24. ADC
5.21. DAC12
MP430F15x ve MP430F16x cihazlarının iki eş parçalı 12-bit DAC’ları vardır. Her
DAC12 modülü çıkış voltajı DAC olan bir 12-bit R-ladder’dir. Her DAC12 modülü
pozitif referans için AVCC veya ADC12 modülünden 1.5-V yada 2.5-V referans
sinyali kullanabilir.
Her DAC12 modülü yüksek derecede ayarlanabilirdir. Her DAC modülünün
güncellenmesi, Zamanlayıcı_A veya Zamanlayıcı_B den bir çıkış olayı olması
üzerine ayrı ayrı seçilmiş olabilir veya veri ilgili DAC12xDAT kütüğüne yazıldıktan
hemen sonra olabilir. Ek olarak, DAC12 modülleri eş zamanlı kılınabilir.
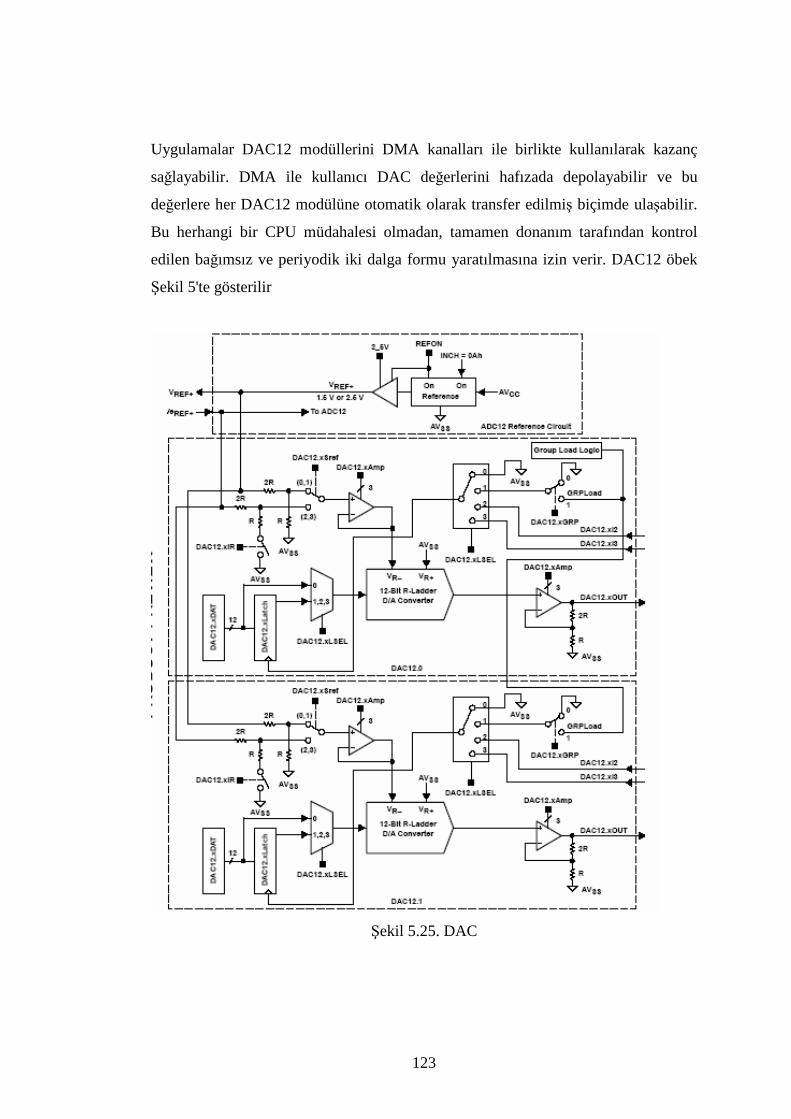
123
Uygulamalar DAC12 modüllerini DMA kanalları ile birlikte kullanılarak kazanç
sağlayabilir. DMA ile kullanıcı DAC değerlerini hafızada depolayabilir ve bu
değerlere her DAC12 modülüne otomatik olarak transfer edilmiş biçimde ulaşabilir.
Bu herhangi bir CPU müdahalesi olmadan, tamamen donanım tarafından kontrol
edilen bağımsız ve periyodik iki dalga formu yaratılmasına izin verir. DAC12 öbek
Şekil 5'te gösterilir
Şekil 5.25. DAC
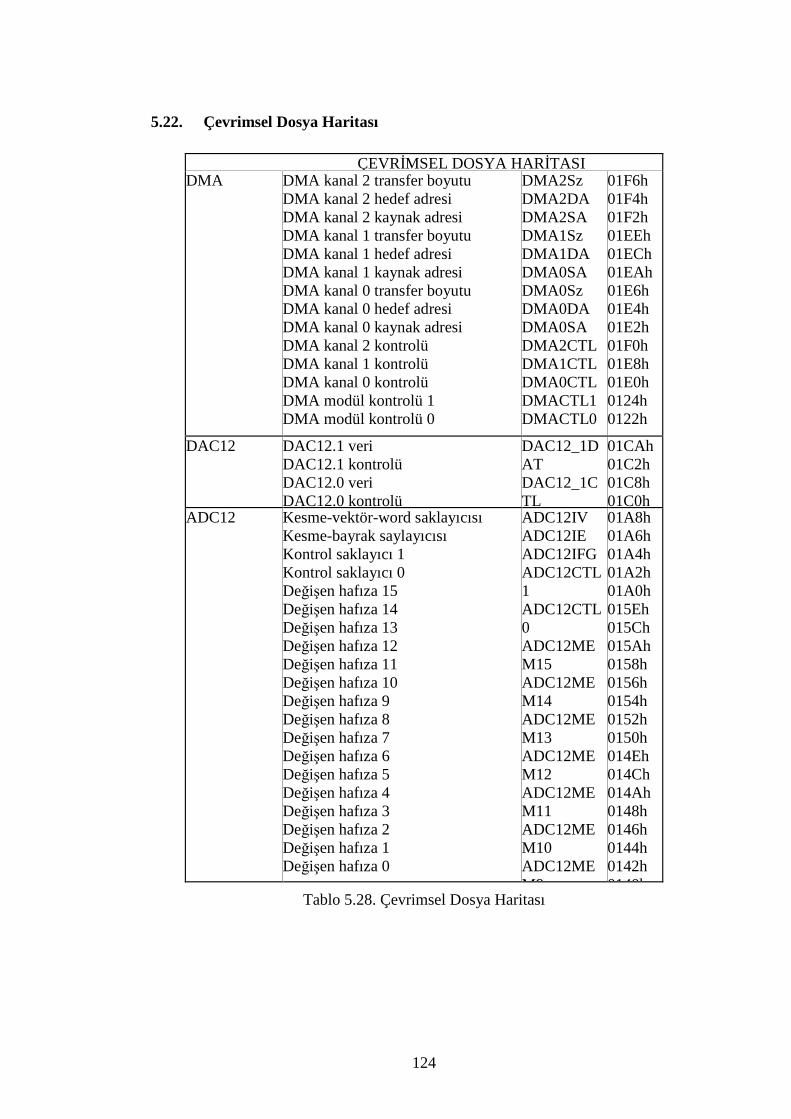
124
5.22. Çevrimsel Dosya Haritası
ÇEVRĐMSEL DOSYA HARĐTASI DMA DMA kanal 2 transfer boyutu
DMA kanal 2 hedef adresi DMA kanal 2 kaynak adresi DMA kanal 1 transfer boyutu DMA kanal 1 hedef adresi DMA kanal 1 kaynak adresi DMA kanal 0 transfer boyutu DMA kanal 0 hedef adresi DMA kanal 0 kaynak adresi DMA kanal 2 kontrolü DMA kanal 1 kontrolü DMA kanal 0 kontrolü DMA modül kontrolü 1 DMA modül kontrolü 0
DMA2Sz DMA2DA DMA2SA DMA1Sz DMA1DA DMA0SA DMA0Sz DMA0DA DMA0SA DMA2CTL DMA1CTL DMA0CTL DMACTL1 DMACTL0
01F6h 01F4h 01F2h 01EEh 01ECh 01EAh 01E6h 01E4h 01E2h 01F0h 01E8h 01E0h 0124h 0122h
DAC12 DAC12.1 veri DAC12.1 kontrolü DAC12.0 veri DAC12.0 kontrolü
DAC12_1DAT DAC12_1CTL
01CAh 01C2h 01C8h 01C0h
ADC12 Kesme-vektör-word saklayıcısı Kesme-bayrak saylayıcısı Kontrol saklayıcı 1 Kontrol saklayıcı 0 Değişen hafıza 15 Değişen hafıza 14 Değişen hafıza 13 Değişen hafıza 12 Değişen hafıza 11 Değişen hafıza 10 Değişen hafıza 9 Değişen hafıza 8 Değişen hafıza 7 Değişen hafıza 6 Değişen hafıza 5 Değişen hafıza 4 Değişen hafıza 3 Değişen hafıza 2 Değişen hafıza 1 Değişen hafıza 0
ADC12IV ADC12IE ADC12IFG ADC12CTL1 ADC12CTL0 ADC12MEM15 ADC12MEM14 ADC12MEM13 ADC12MEM12 ADC12MEM11 ADC12MEM10 ADC12MEM9
01A8h 01A6h 01A4h 01A2h 01A0h 015Eh 015Ch 015Ah 0158h 0156h 0154h 0152h 0150h 014Eh 014Ch 014Ah 0148h 0146h 0144h 0142h 0140h
Tablo 5.28. Çevrimsel Dosya Haritası
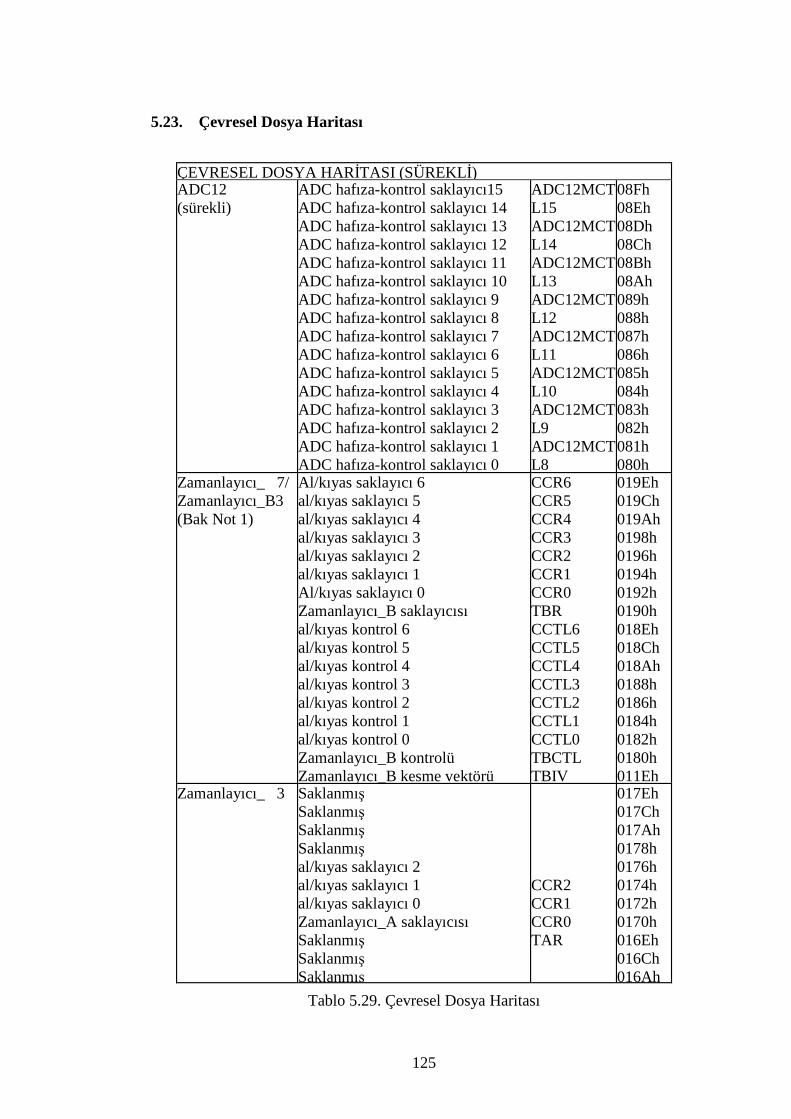
125
5.23. Çevresel Dosya Haritası
ÇEVRESEL DOSYA HARĐTASI (SÜREKLĐ) ADC12 (sürekli)
ADC hafıza-kontrol saklayıcı15 ADC hafıza-kontrol saklayıcı 14 ADC hafıza-kontrol saklayıcı 13 ADC hafıza-kontrol saklayıcı 12 ADC hafıza-kontrol saklayıcı 11 ADC hafıza-kontrol saklayıcı 10 ADC hafıza-kontrol saklayıcı 9 ADC hafıza-kontrol saklayıcı 8 ADC hafıza-kontrol saklayıcı 7 ADC hafıza-kontrol saklayıcı 6 ADC hafıza-kontrol saklayıcı 5 ADC hafıza-kontrol saklayıcı 4 ADC hafıza-kontrol saklayıcı 3 ADC hafıza-kontrol saklayıcı 2 ADC hafıza-kontrol saklayıcı 1 ADC hafıza-kontrol saklayıcı 0
ADC12MCTL15 ADC12MCTL14 ADC12MCTL13 ADC12MCTL12 ADC12MCTL11 ADC12MCTL10 ADC12MCTL9 ADC12MCTL8
08Fh 08Eh 08Dh 08Ch 08Bh 08Ah 089h 088h 087h 086h 085h 084h 083h 082h 081h 080h
Zamanlayıcı_ 7/ Zamanlayıcı_B3 (Bak Not 1)
Al/kıyas saklayıcı 6 al/kıyas saklayıcı 5 al/kıyas saklayıcı 4 al/kıyas saklayıcı 3 al/kıyas saklayıcı 2 al/kıyas saklayıcı 1 Al/kıyas saklayıcı 0 Zamanlayıcı_B saklayıcısı al/kıyas kontrol 6 al/kıyas kontrol 5 al/kıyas kontrol 4 al/kıyas kontrol 3 al/kıyas kontrol 2 al/kıyas kontrol 1 al/kıyas kontrol 0 Zamanlayıcı_B kontrolü Zamanlayıcı_B kesme vektörü
CCR6 CCR5 CCR4 CCR3 CCR2 CCR1 CCR0 TBR CCTL6 CCTL5 CCTL4 CCTL3 CCTL2 CCTL1 CCTL0 TBCTL TBIV
019Eh 019Ch 019Ah 0198h 0196h 0194h 0192h 0190h 018Eh 018Ch 018Ah 0188h 0186h 0184h 0182h 0180h 011Eh
Zamanlayıcı_ 3 Saklanmış Saklanmış Saklanmış Saklanmış al/kıyas saklayıcı 2 al/kıyas saklayıcı 1 al/kıyas saklayıcı 0 Zamanlayıcı_A saklayıcısı Saklanmış Saklanmış Saklanmış
CCR2 CCR1 CCR0 TAR
017Eh 017Ch 017Ah 0178h 0176h 0174h 0172h 0170h 016Eh 016Ch 016Ah
Tablo 5.29. Çevresel Dosya Haritası
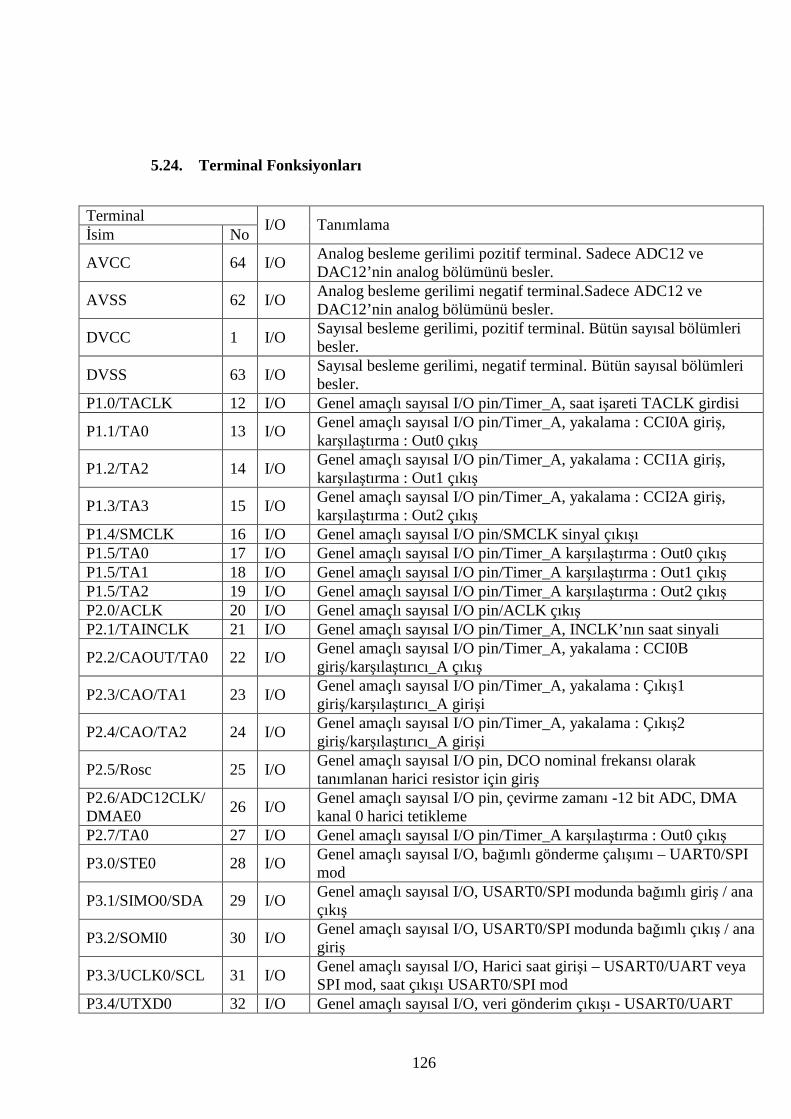
126
5.24. Terminal Fonksiyonları
Terminal Đsim No
I/O Tanımlama
AVCC 64 I/O Analog besleme gerilimi pozitif terminal. Sadece ADC12 ve DAC12’nin analog bölümünü besler.
AVSS 62 I/O Analog besleme gerilimi negatif terminal.Sadece ADC12 ve DAC12’nin analog bölümünü besler.
DVCC 1 I/O Sayısal besleme gerilimi, pozitif terminal. Bütün sayısal bölümleri besler.
DVSS 63 I/O Sayısal besleme gerilimi, negatif terminal. Bütün sayısal bölümleri besler.
P1.0/TACLK 12 I/O Genel amaçlı sayısal I/O pin/Timer_A, saat işareti TACLK girdisi
P1.1/TA0 13 I/O Genel amaçlı sayısal I/O pin/Timer_A, yakalama : CCI0A giriş, karşılaştırma : Out0 çıkış
P1.2/TA2 14 I/O Genel amaçlı sayısal I/O pin/Timer_A, yakalama : CCI1A giriş, karşılaştırma : Out1 çıkış
P1.3/TA3 15 I/O Genel amaçlı sayısal I/O pin/Timer_A, yakalama : CCI2A giriş, karşılaştırma : Out2 çıkış
P1.4/SMCLK 16 I/O Genel amaçlı sayısal I/O pin/SMCLK sinyal çıkışı P1.5/TA0 17 I/O Genel amaçlı sayısal I/O pin/Timer_A karşılaştırma : Out0 çıkış P1.5/TA1 18 I/O Genel amaçlı sayısal I/O pin/Timer_A karşılaştırma : Out1 çıkış P1.5/TA2 19 I/O Genel amaçlı sayısal I/O pin/Timer_A karşılaştırma : Out2 çıkış P2.0/ACLK 20 I/O Genel amaçlı sayısal I/O pin/ACLK çıkış P2.1/TAINCLK 21 I/O Genel amaçlı sayısal I/O pin/Timer_A, INCLK’nın saat sinyali
P2.2/CAOUT/TA0 22 I/O Genel amaçlı sayısal I/O pin/Timer_A, yakalama : CCI0B giriş/karşılaştırıcı_A çıkış
P2.3/CAO/TA1 23 I/O Genel amaçlı sayısal I/O pin/Timer_A, yakalama : Çıkış1 giriş/karşılaştırıcı_A girişi
P2.4/CAO/TA2 24 I/O Genel amaçlı sayısal I/O pin/Timer_A, yakalama : Çıkış2 giriş/karşılaştırıcı_A girişi
P2.5/Rosc 25 I/O Genel amaçlı sayısal I/O pin, DCO nominal frekansı olarak tanımlanan harici resistor için giriş
P2.6/ADC12CLK/DMAE0
26 I/O Genel amaçlı sayısal I/O pin, çevirme zamanı -12 bit ADC, DMA kanal 0 harici tetikleme
P2.7/TA0 27 I/O Genel amaçlı sayısal I/O pin/Timer_A karşılaştırma : Out0 çıkış
P3.0/STE0 28 I/O Genel amaçlı sayısal I/O, bağımlı gönderme çalışımı – UART0/SPI mod
P3.1/SIMO0/SDA 29 I/O Genel amaçlı sayısal I/O, USART0/SPI modunda bağımlı giriş / ana çıkış
P3.2/SOMI0 30 I/O Genel amaçlı sayısal I/O, USART0/SPI modunda bağımlı çıkış / ana giriş
P3.3/UCLK0/SCL 31 I/O Genel amaçlı sayısal I/O, Harici saat girişi – USART0/UART veya SPI mod, saat çıkışı USART0/SPI mod
P3.4/UTXD0 32 I/O Genel amaçlı sayısal I/O, veri gönderim çıkışı - USART0/UART
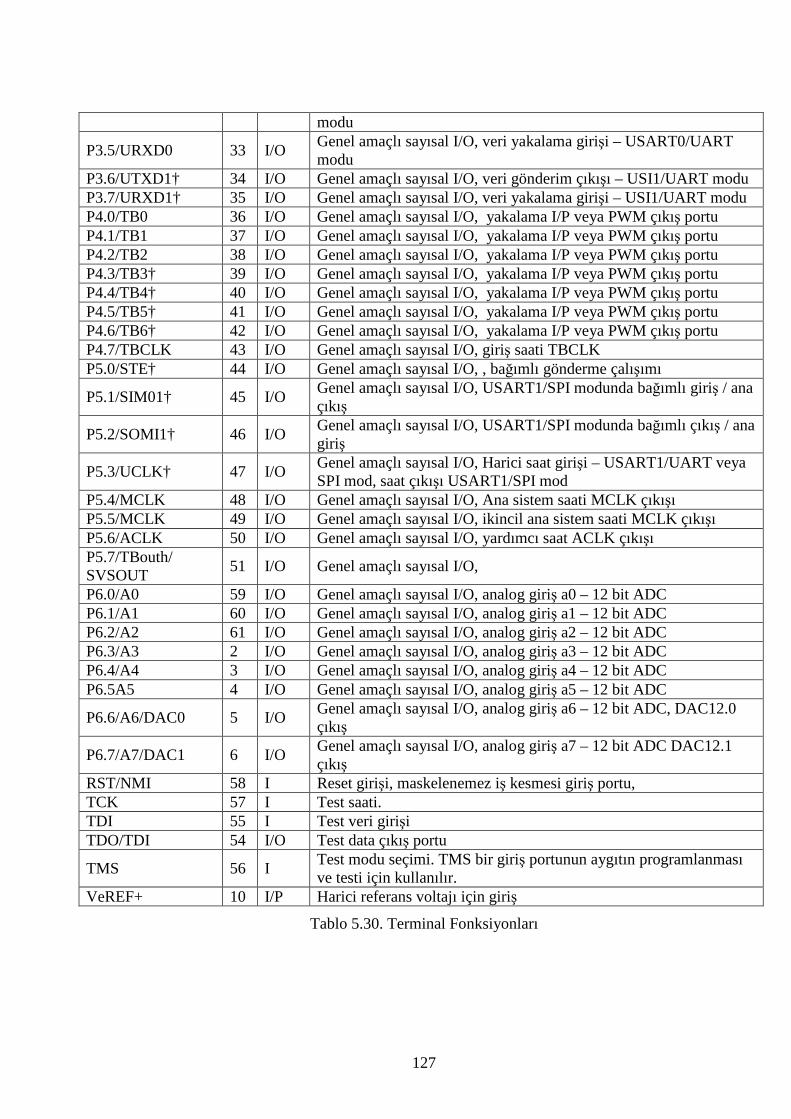
127
modu
P3.5/URXD0 33 I/O Genel amaçlı sayısal I/O, veri yakalama girişi – USART0/UART modu
P3.6/UTXD1† 34 I/O Genel amaçlı sayısal I/O, veri gönderim çıkışı – USI1/UART modu P3.7/URXD1† 35 I/O Genel amaçlı sayısal I/O, veri yakalama girişi – USI1/UART modu P4.0/TB0 36 I/O Genel amaçlı sayısal I/O, yakalama I/P veya PWM çıkış portu P4.1/TB1 37 I/O Genel amaçlı sayısal I/O, yakalama I/P veya PWM çıkış portu P4.2/TB2 38 I/O Genel amaçlı sayısal I/O, yakalama I/P veya PWM çıkış portu P4.3/TB3† 39 I/O Genel amaçlı sayısal I/O, yakalama I/P veya PWM çıkış portu P4.4/TB4† 40 I/O Genel amaçlı sayısal I/O, yakalama I/P veya PWM çıkış portu P4.5/TB5† 41 I/O Genel amaçlı sayısal I/O, yakalama I/P veya PWM çıkış portu P4.6/TB6† 42 I/O Genel amaçlı sayısal I/O, yakalama I/P veya PWM çıkış portu P4.7/TBCLK 43 I/O Genel amaçlı sayısal I/O, giriş saati TBCLK P5.0/STE† 44 I/O Genel amaçlı sayısal I/O, , bağımlı gönderme çalışımı
P5.1/SIM01† 45 I/O Genel amaçlı sayısal I/O, USART1/SPI modunda bağımlı giriş / ana çıkış
P5.2/SOMI1† 46 I/O Genel amaçlı sayısal I/O, USART1/SPI modunda bağımlı çıkış / ana giriş
P5.3/UCLK† 47 I/O Genel amaçlı sayısal I/O, Harici saat girişi – USART1/UART veya SPI mod, saat çıkışı USART1/SPI mod
P5.4/MCLK 48 I/O Genel amaçlı sayısal I/O, Ana sistem saati MCLK çıkışı P5.5/MCLK 49 I/O Genel amaçlı sayısal I/O, ikincil ana sistem saati MCLK çıkışı P5.6/ACLK 50 I/O Genel amaçlı sayısal I/O, yardımcı saat ACLK çıkışı P5.7/TBouth/ SVSOUT
51 I/O Genel amaçlı sayısal I/O,
P6.0/A0 59 I/O Genel amaçlı sayısal I/O, analog giriş a0 – 12 bit ADC P6.1/A1 60 I/O Genel amaçlı sayısal I/O, analog giriş a1 – 12 bit ADC P6.2/A2 61 I/O Genel amaçlı sayısal I/O, analog giriş a2 – 12 bit ADC P6.3/A3 2 I/O Genel amaçlı sayısal I/O, analog giriş a3 – 12 bit ADC P6.4/A4 3 I/O Genel amaçlı sayısal I/O, analog giriş a4 – 12 bit ADC P6.5A5 4 I/O Genel amaçlı sayısal I/O, analog giriş a5 – 12 bit ADC
P6.6/A6/DAC0 5 I/O Genel amaçlı sayısal I/O, analog giriş a6 – 12 bit ADC, DAC12.0 çıkış
P6.7/A7/DAC1 6 I/O Genel amaçlı sayısal I/O, analog giriş a7 – 12 bit ADC DAC12.1 çıkış
RST/NMI 58 I Reset girişi, maskelenemez iş kesmesi giriş portu, TCK 57 I Test saati. TDI 55 I Test veri girişi TDO/TDI 54 I/O Test data çıkış portu
TMS 56 I Test modu seçimi. TMS bir giriş portunun aygıtın programlanması ve testi için kullanılır.
VeREF+ 10 I/P Harici referans voltajı için giriş
Tablo 5.30. Terminal Fonksiyonları
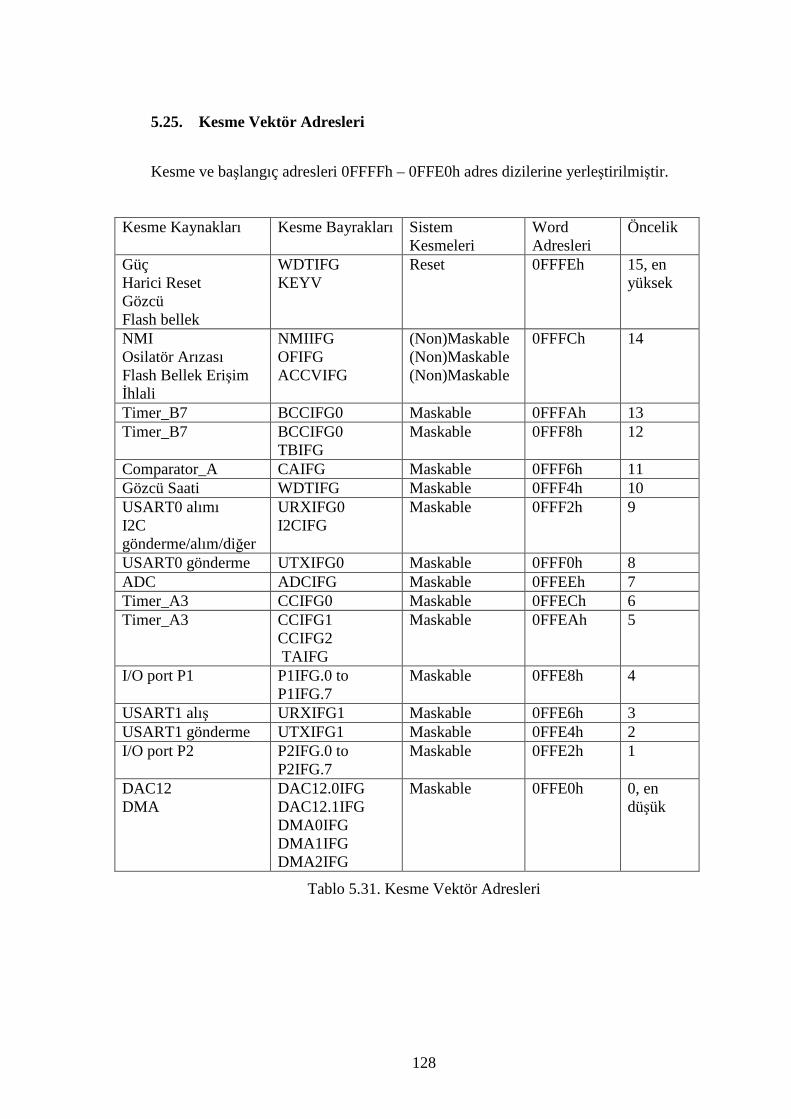
128
5.25. Kesme Vektör Adresleri
Kesme ve başlangıç adresleri 0FFFFh – 0FFE0h adres dizilerine yerleştirilmi ştir.
Kesme Kaynakları Kesme Bayrakları Sistem Kesmeleri
Word Adresleri
Öncelik
Güç Harici Reset Gözcü Flash bellek
WDTIFG KEYV
Reset 0FFFEh 15, en yüksek
NMI Osilatör Arızası Flash Bellek Erişim Đhlali
NMIIFG OFIFG ACCVIFG
(Non)Maskable (Non)Maskable (Non)Maskable
0FFFCh 14
Timer_B7 BCCIFG0 Maskable 0FFFAh 13 Timer_B7 BCCIFG0
TBIFG Maskable 0FFF8h 12
Comparator_A CAIFG Maskable 0FFF6h 11 Gözcü Saati WDTIFG Maskable 0FFF4h 10 USART0 alımı I2C gönderme/alım/diğer
URXIFG0 I2CIFG
Maskable 0FFF2h 9
USART0 gönderme UTXIFG0 Maskable 0FFF0h 8 ADC ADCIFG Maskable 0FFEEh 7 Timer_A3 CCIFG0 Maskable 0FFECh 6 Timer_A3 CCIFG1
CCIFG2 TAIFG
Maskable 0FFEAh 5
I/O port P1 P1IFG.0 to P1IFG.7
Maskable 0FFE8h 4
USART1 alış URXIFG1 Maskable 0FFE6h 3 USART1 gönderme UTXIFG1 Maskable 0FFE4h 2 I/O port P2 P2IFG.0 to
P2IFG.7 Maskable 0FFE2h 1
DAC12 DMA
DAC12.0IFG DAC12.1IFG DMA0IFG DMA1IFG DMA2IFG
Maskable 0FFE0h 0, en düşük
Tablo 5.31. Kesme Vektör Adresleri
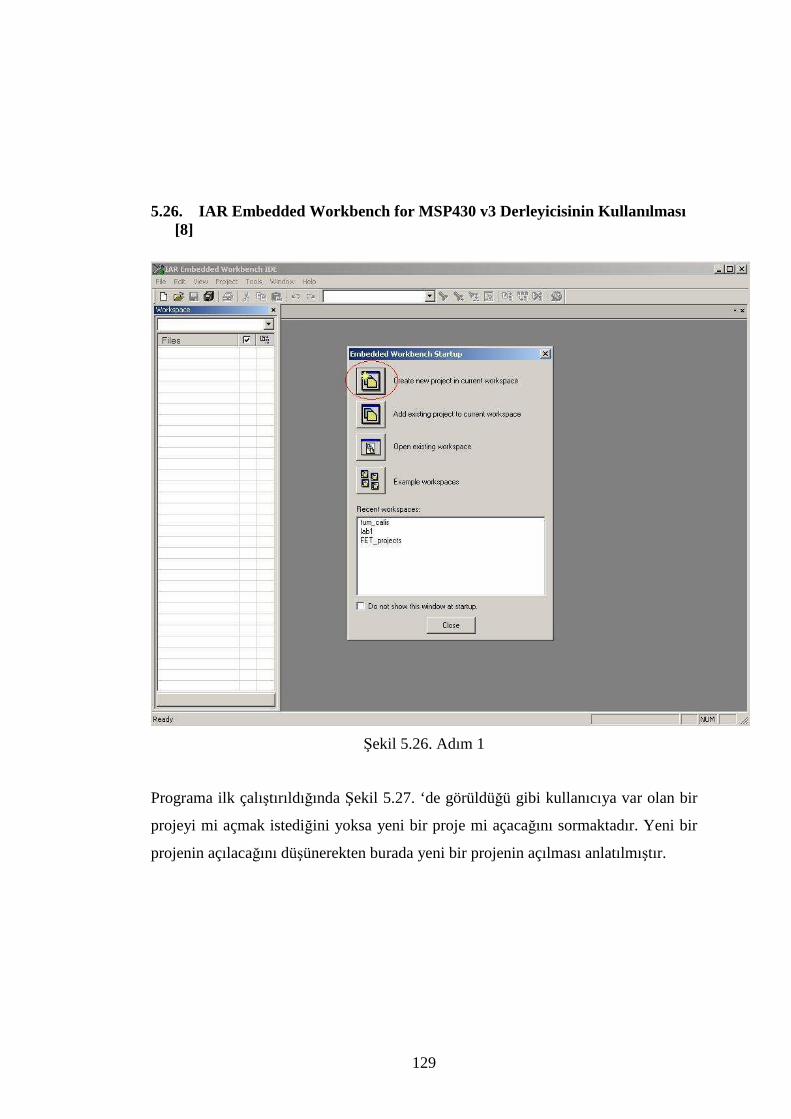
129
5.26. IAR Embedded Workbench for MSP430 v3 Derleyicisinin Kullanılması [8]
Şekil 5.26. Adım 1
Programa ilk çalıştırıldığında Şekil 5.27. ‘de görüldüğü gibi kullanıcıya var olan bir
projeyi mi açmak istediğini yoksa yeni bir proje mi açacağını sormaktadır. Yeni bir
projenin açılacağını düşünerekten burada yeni bir projenin açılması anlatılmıştır.
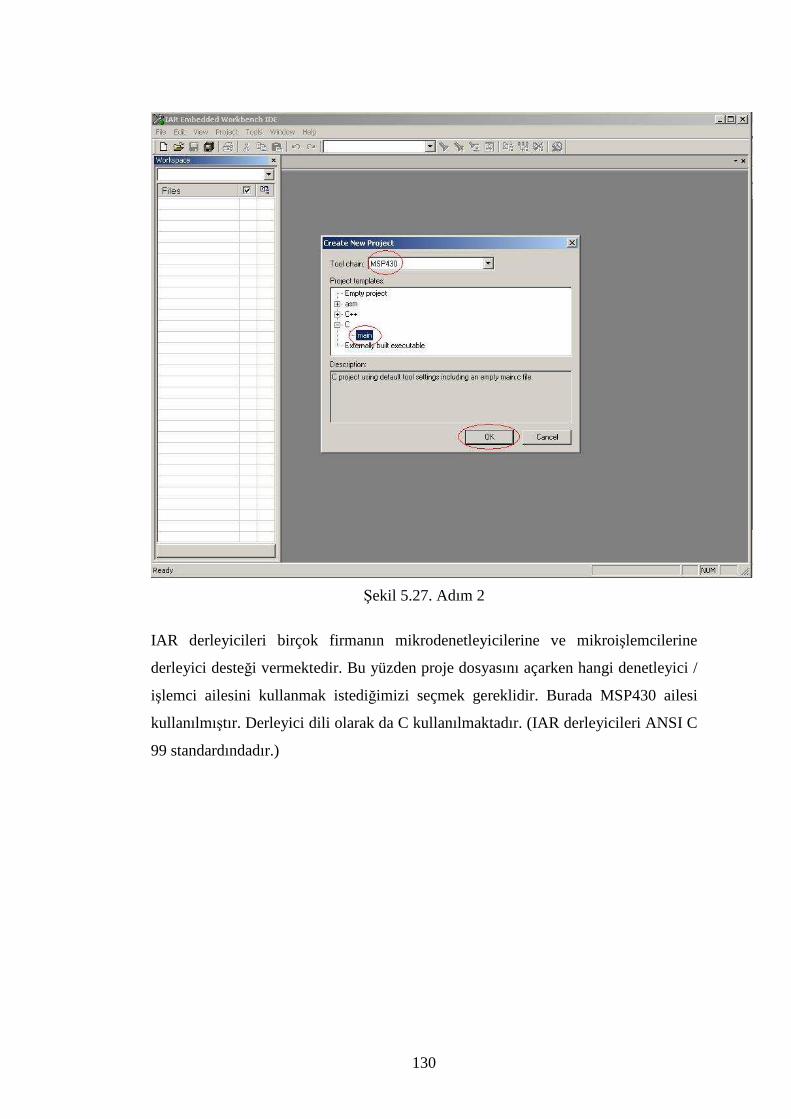
130
Şekil 5.27. Adım 2
IAR derleyicileri birçok firmanın mikrodenetleyicilerine ve mikroişlemcilerine
derleyici desteği vermektedir. Bu yüzden proje dosyasını açarken hangi denetleyici /
işlemci ailesini kullanmak istediğimizi seçmek gereklidir. Burada MSP430 ailesi
kullanılmıştır. Derleyici dili olarak da C kullanılmaktadır. (IAR derleyicileri ANSI C
99 standardındadır.)
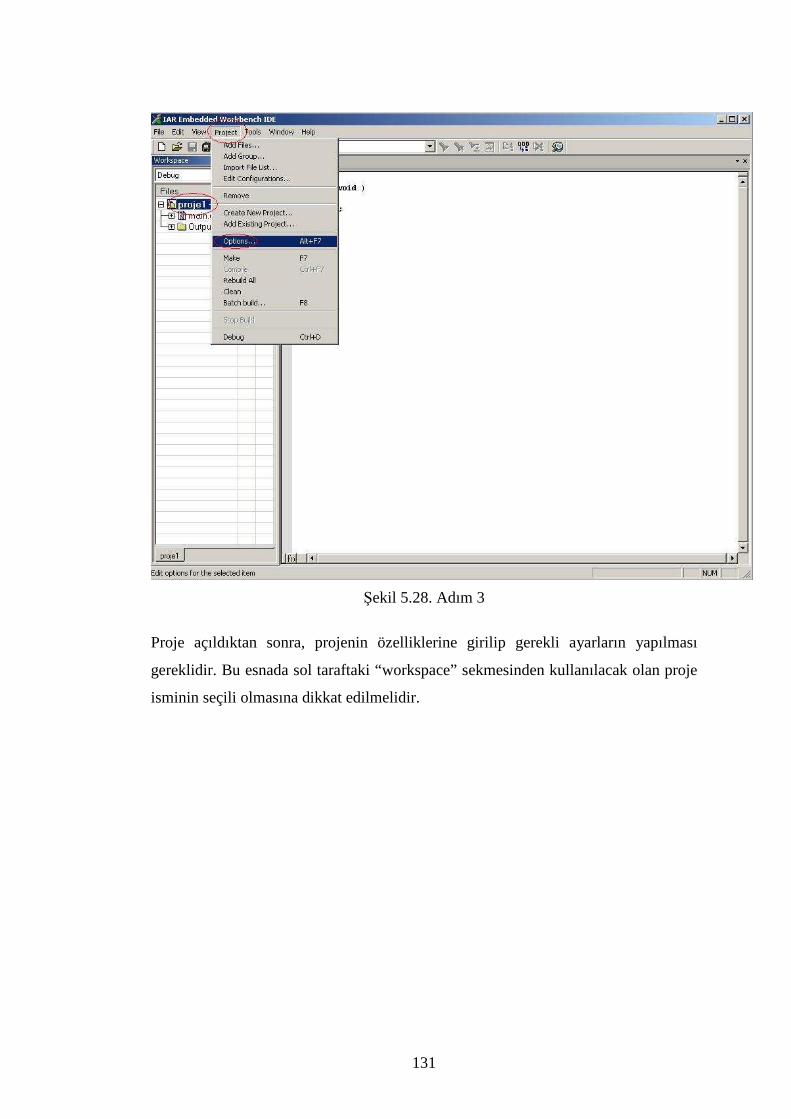
131
Şekil 5.28. Adım 3
Proje açıldıktan sonra, projenin özelliklerine girilip gerekli ayarların yapılması
gereklidir. Bu esnada sol taraftaki “workspace” sekmesinden kullanılacak olan proje
isminin seçili olmasına dikkat edilmelidir.
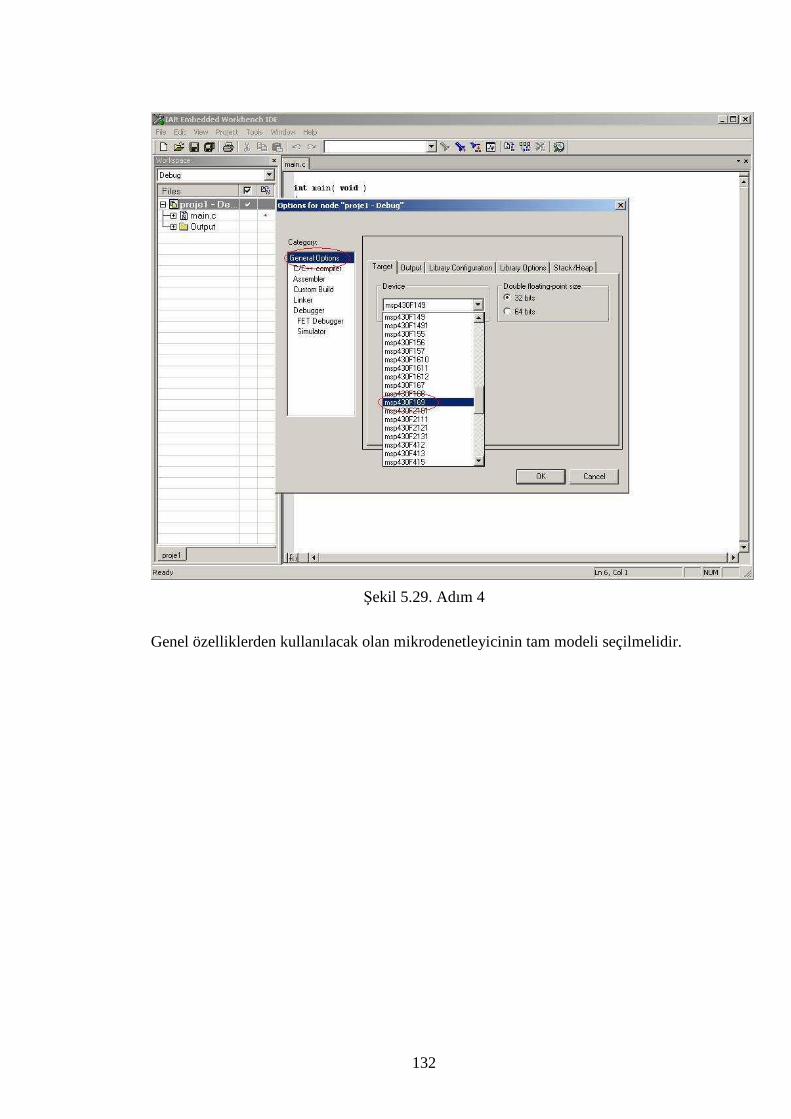
132
Şekil 5.29. Adım 4
Genel özelliklerden kullanılacak olan mikrodenetleyicinin tam modeli seçilmelidir.
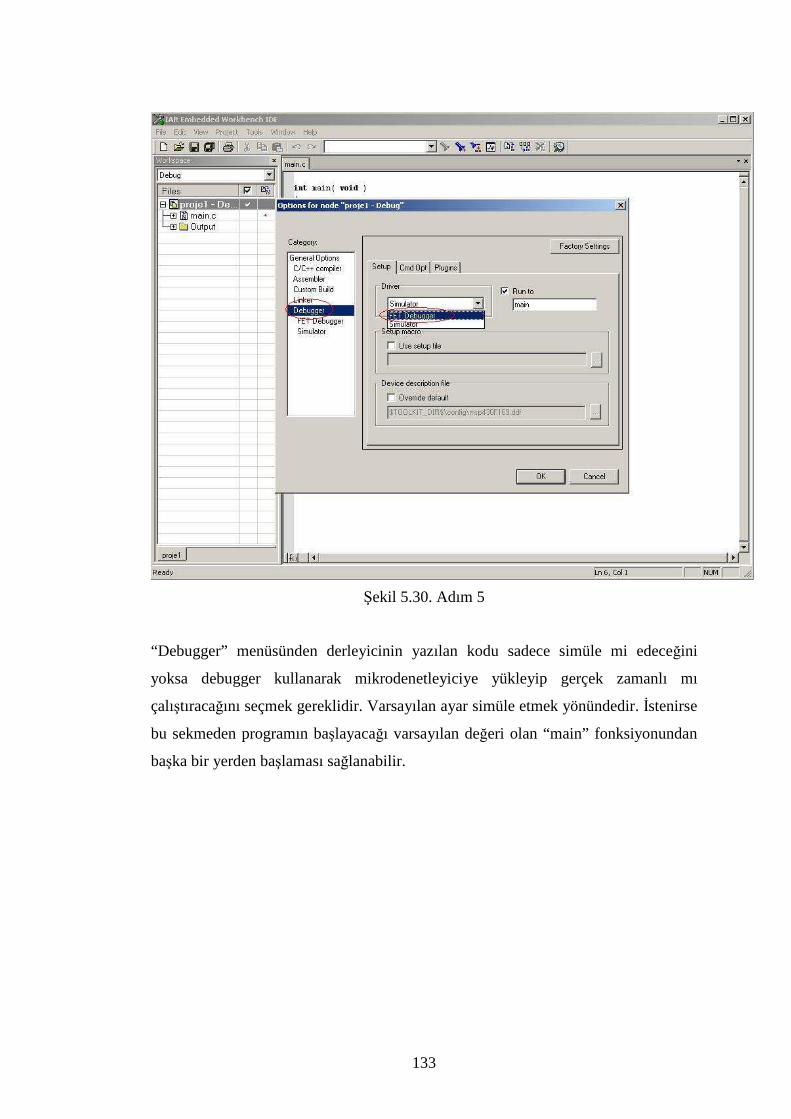
133
Şekil 5.30. Adım 5
“Debugger” menüsünden derleyicinin yazılan kodu sadece simüle mi edeceğini
yoksa debugger kullanarak mikrodenetleyiciye yükleyip gerçek zamanlı mı
çalıştıracağını seçmek gereklidir. Varsayılan ayar simüle etmek yönündedir. Đstenirse
bu sekmeden programın başlayacağı varsayılan değeri olan “main” fonksiyonundan
başka bir yerden başlaması sağlanabilir.
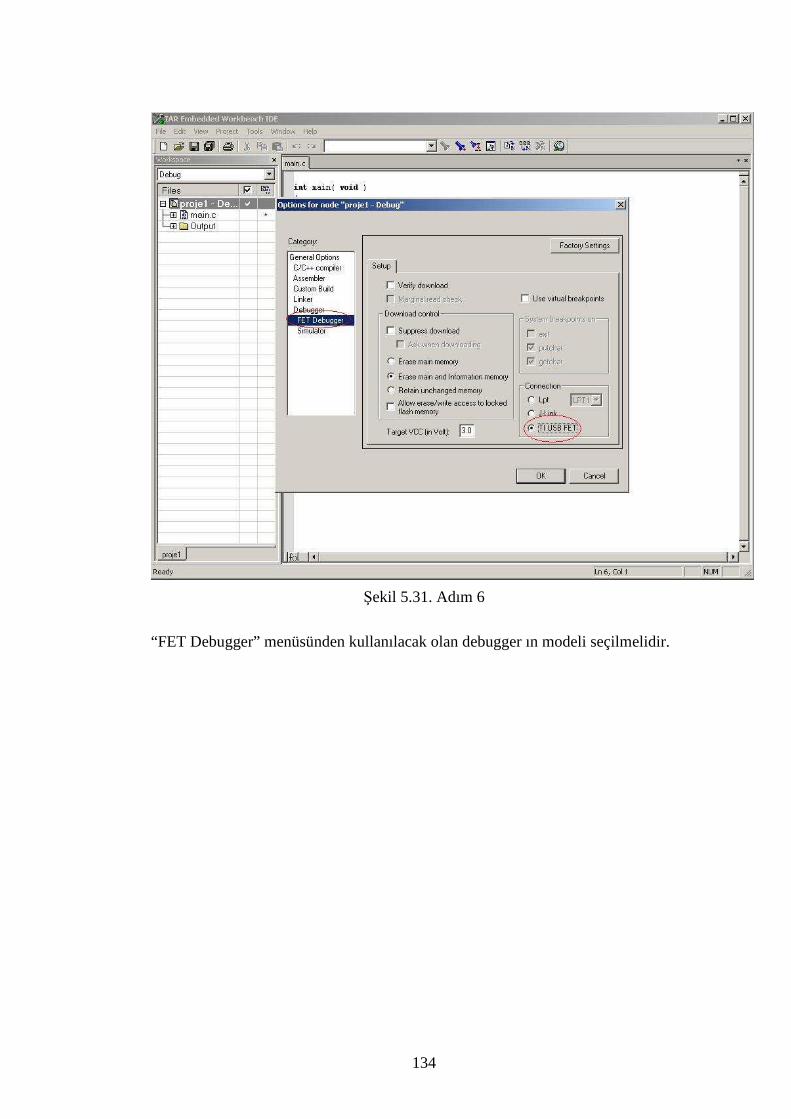
134
Şekil 5.31. Adım 6
“FET Debugger” menüsünden kullanılacak olan debugger ın modeli seçilmelidir.
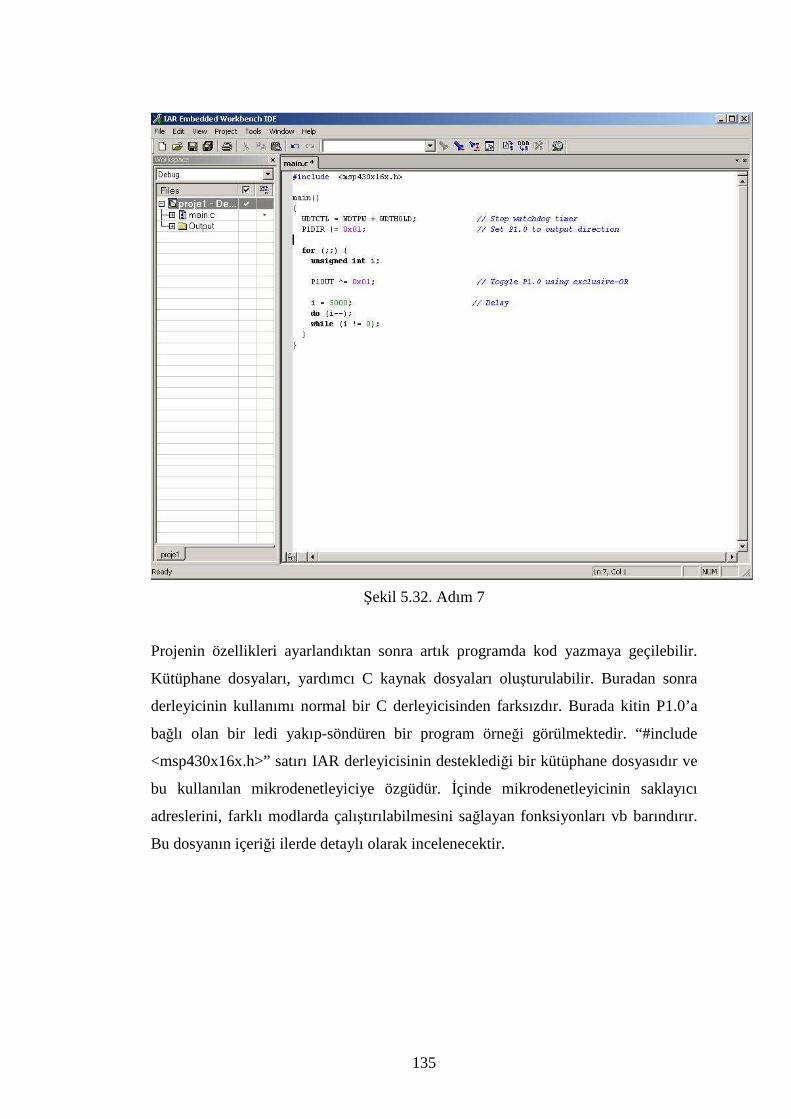
135
Şekil 5.32. Adım 7
Projenin özellikleri ayarlandıktan sonra artık programda kod yazmaya geçilebilir.
Kütüphane dosyaları, yardımcı C kaynak dosyaları oluşturulabilir. Buradan sonra
derleyicinin kullanımı normal bir C derleyicisinden farksızdır. Burada kitin P1.0’a
bağlı olan bir ledi yakıp-söndüren bir program örneği görülmektedir. “#include
<msp430x16x.h>” satırı IAR derleyicisinin desteklediği bir kütüphane dosyasıdır ve
bu kullanılan mikrodenetleyiciye özgüdür. Đçinde mikrodenetleyicinin saklayıcı
adreslerini, farklı modlarda çalıştırılabilmesini sağlayan fonksiyonları vb barındırır.
Bu dosyanın içeriği ilerde detaylı olarak incelenecektir.
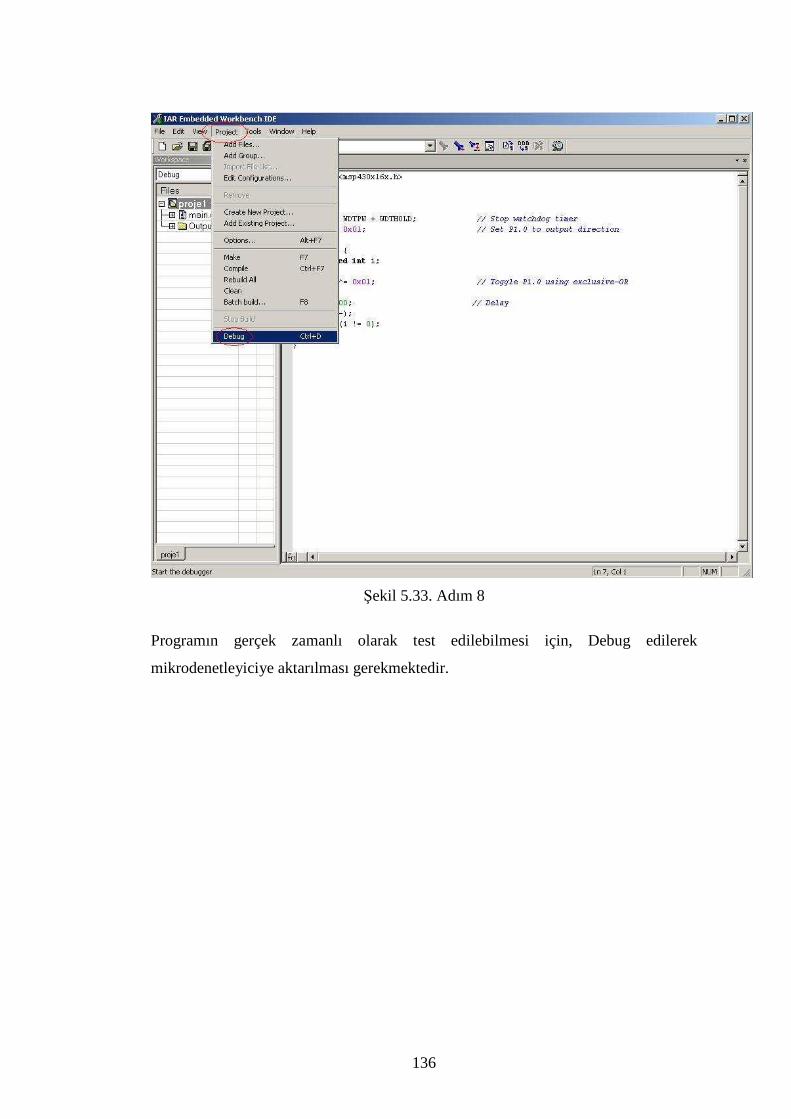
136
Şekil 5.33. Adım 8
Programın gerçek zamanlı olarak test edilebilmesi için, Debug edilerek
mikrodenetleyiciye aktarılması gerekmektedir.
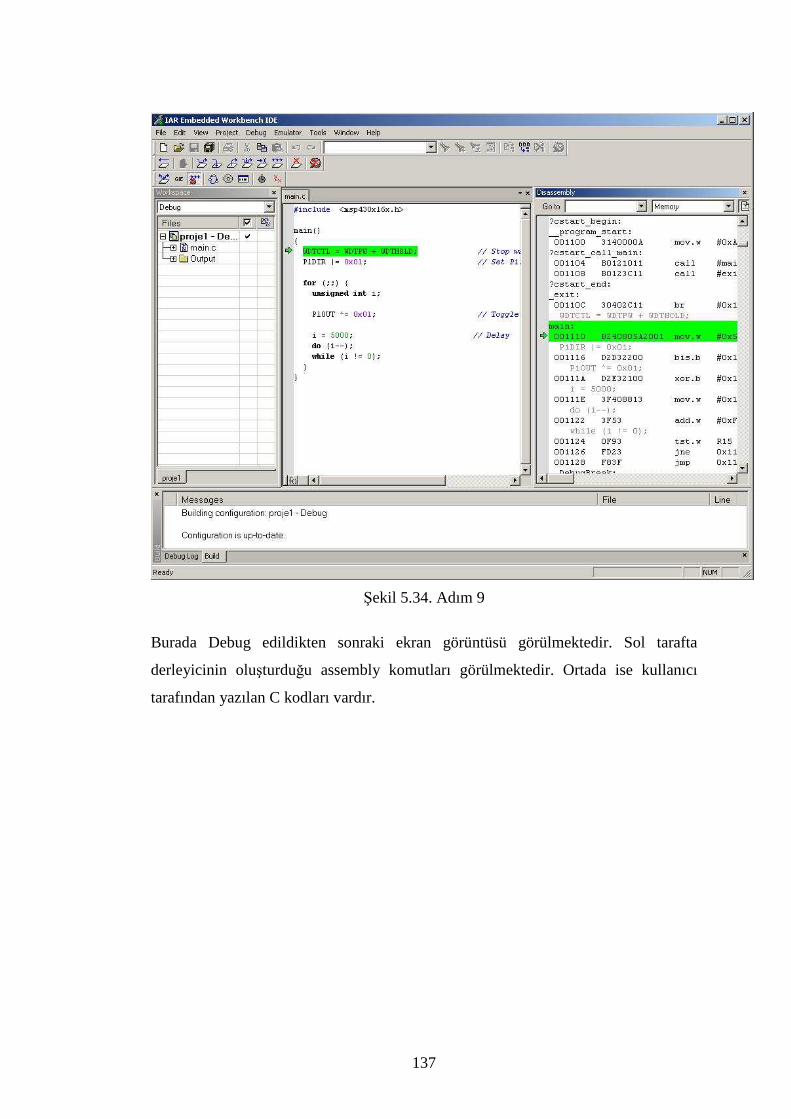
137
Şekil 5.34. Adım 9
Burada Debug edildikten sonraki ekran görüntüsü görülmektedir. Sol tarafta
derleyicinin oluşturduğu assembly komutları görülmektedir. Ortada ise kullanıcı
tarafından yazılan C kodları vardır.
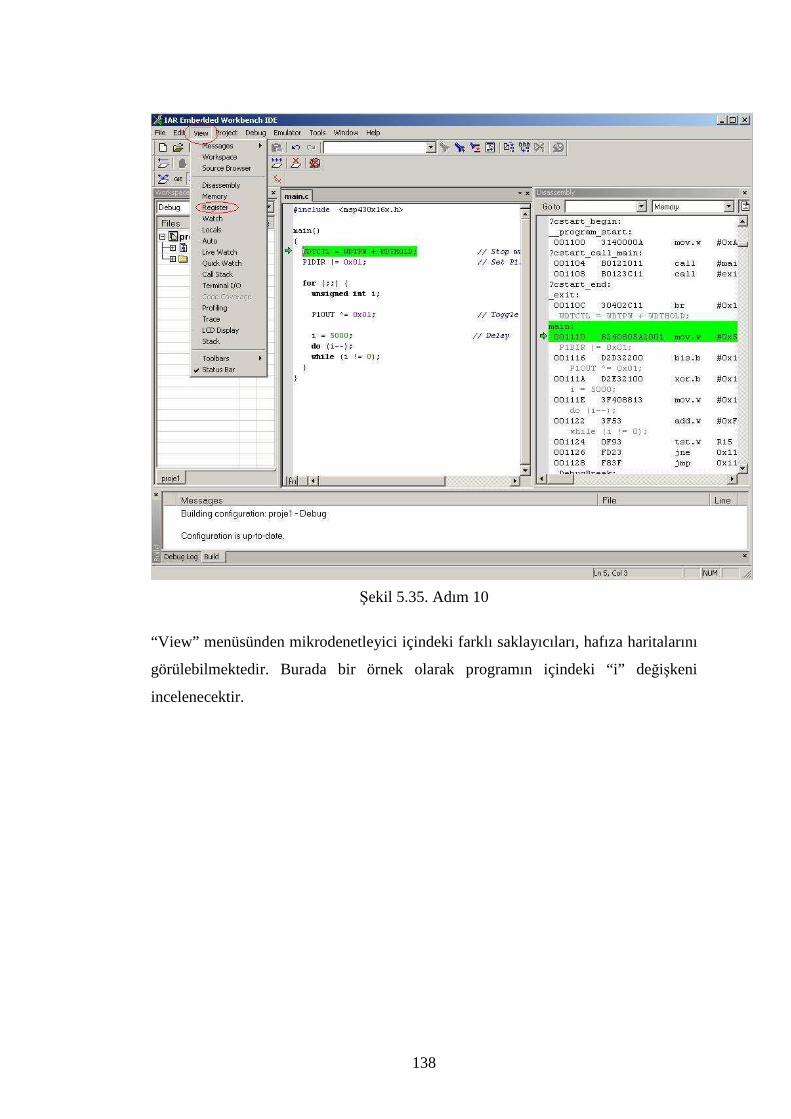
138
Şekil 5.35. Adım 10
“View” menüsünden mikrodenetleyici içindeki farklı saklayıcıları, hafıza haritalarını
görülebilmektedir. Burada bir örnek olarak programın içindeki “i” değişkeni
incelenecektir.
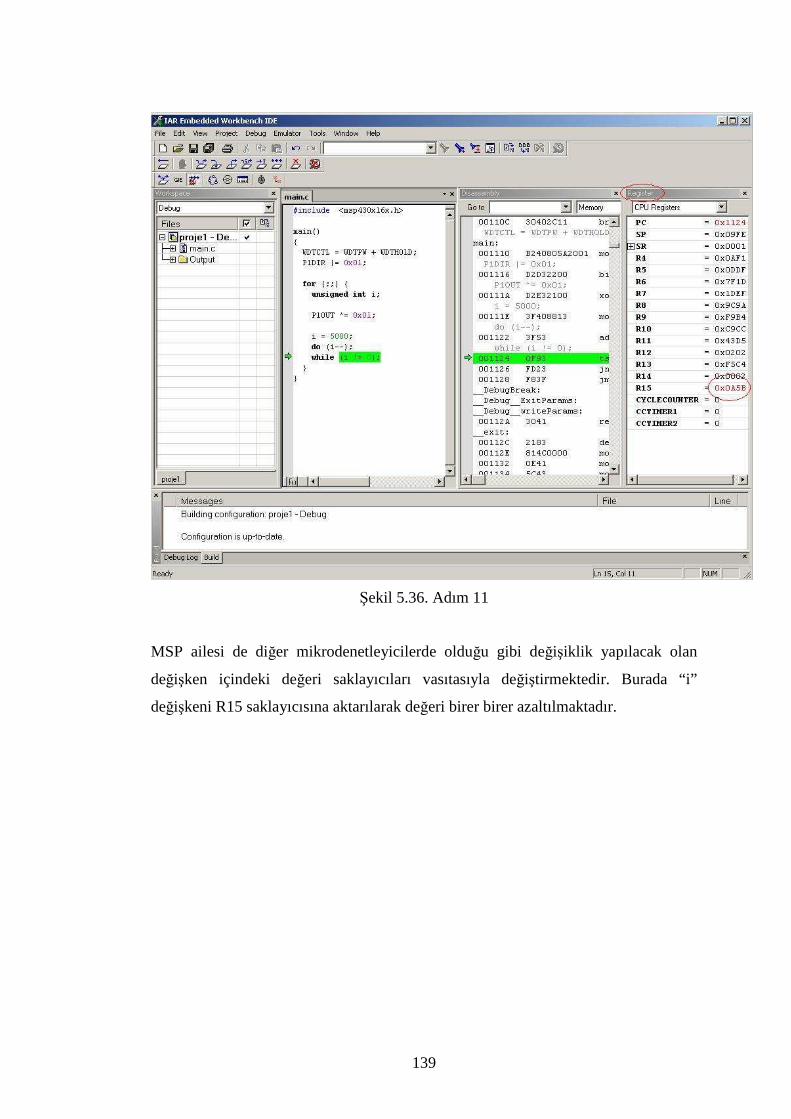
139
Şekil 5.36. Adım 11
MSP ailesi de diğer mikrodenetleyicilerde olduğu gibi değişiklik yapılacak olan
değişken içindeki değeri saklayıcıları vasıtasıyla değiştirmektedir. Burada “i”
değişkeni R15 saklayıcısına aktarılarak değeri birer birer azaltılmaktadır.
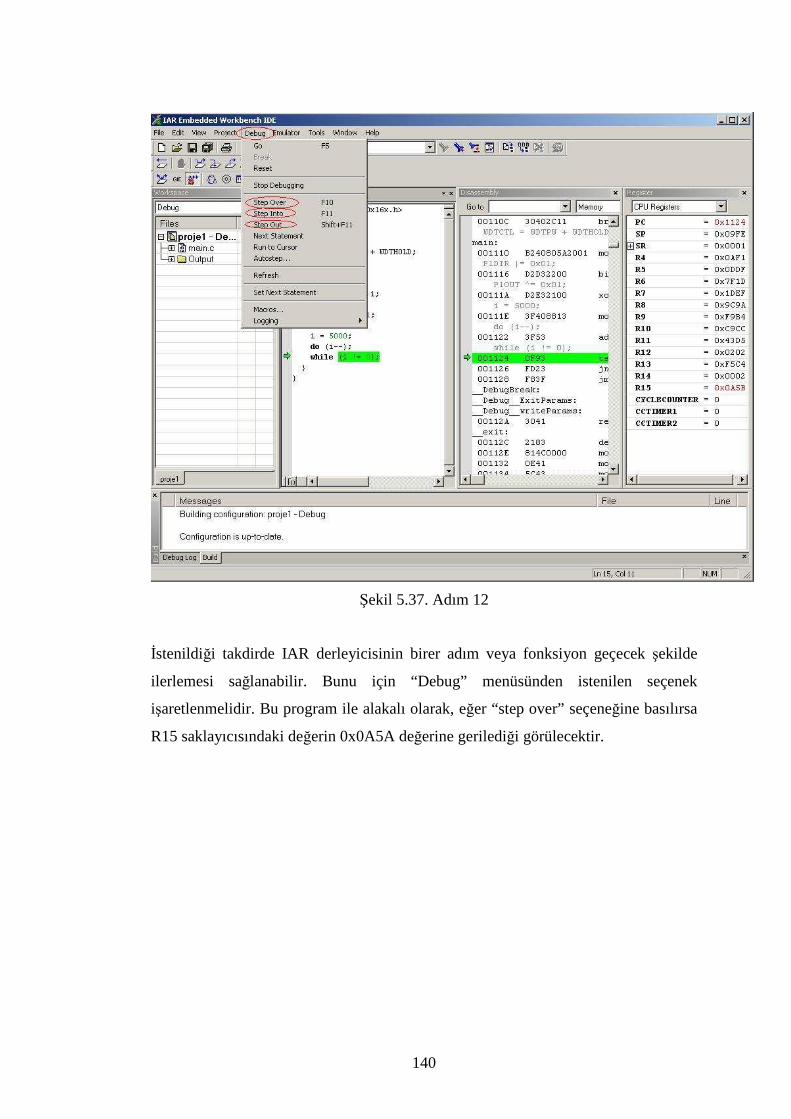
140
Şekil 5.37. Adım 12
Đstenildiği takdirde IAR derleyicisinin birer adım veya fonksiyon geçecek şekilde
ilerlemesi sağlanabilir. Bunu için “Debug” menüsünden istenilen seçenek
işaretlenmelidir. Bu program ile alakalı olarak, eğer “step over” seçeneğine basılırsa
R15 saklayıcısındaki değerin 0x0A5A değerine gerilediği görülecektir.
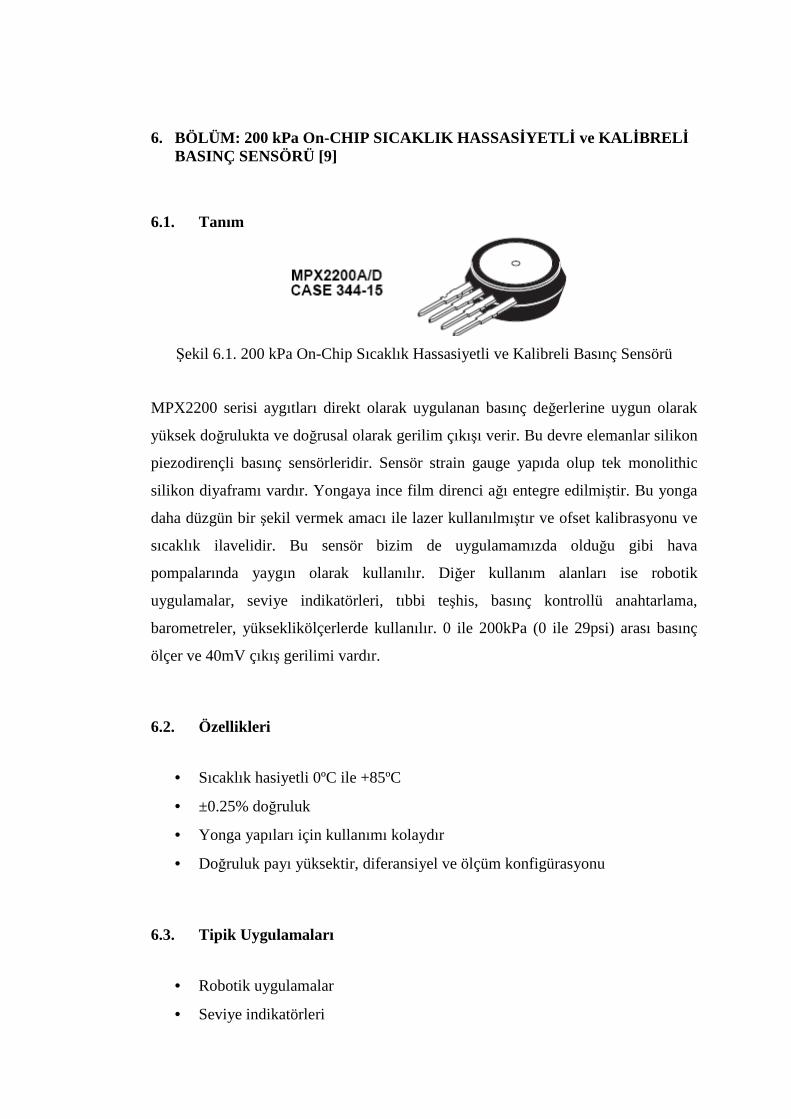
6. BÖLÜM: 200 kPa On-CHIP SICAKLIK HASSAS ĐYETL Đ ve KALĐBRELĐ BASINÇ SENSÖRÜ [9]
6.1. Tanım
Şekil 6.1. 200 kPa On-Chip Sıcaklık Hassasiyetli ve Kalibreli Basınç Sensörü
MPX2200 serisi aygıtları direkt olarak uygulanan basınç değerlerine uygun olarak
yüksek doğrulukta ve doğrusal olarak gerilim çıkışı verir. Bu devre elemanlar silikon
piezodirençli basınç sensörleridir. Sensör strain gauge yapıda olup tek monolithic
silikon diyaframı vardır. Yongaya ince film direnci ağı entegre edilmiştir. Bu yonga
daha düzgün bir şekil vermek amacı ile lazer kullanılmıştır ve ofset kalibrasyonu ve
sıcaklık ilavelidir. Bu sensör bizim de uygulamamızda olduğu gibi hava
pompalarında yaygın olarak kullanılır. Diğer kullanım alanları ise robotik
uygulamalar, seviye indikatörleri, tıbbi teşhis, basınç kontrollü anahtarlama,
barometreler, yükseklikölçerlerde kullanılır. 0 ile 200kPa (0 ile 29psi) arası basınç
ölçer ve 40mV çıkış gerilimi vardır.
6.2. Özellikleri
• Sıcaklık hasiyetli 0ºC ile +85ºC
• ±0.25% doğruluk
• Yonga yapıları için kullanımı kolaydır
• Doğruluk payı yüksektir, diferansiyel ve ölçüm konfigürasyonu
6.3. Tipik Uygulamaları
• Robotik uygulamalar
• Seviye indikatörleri
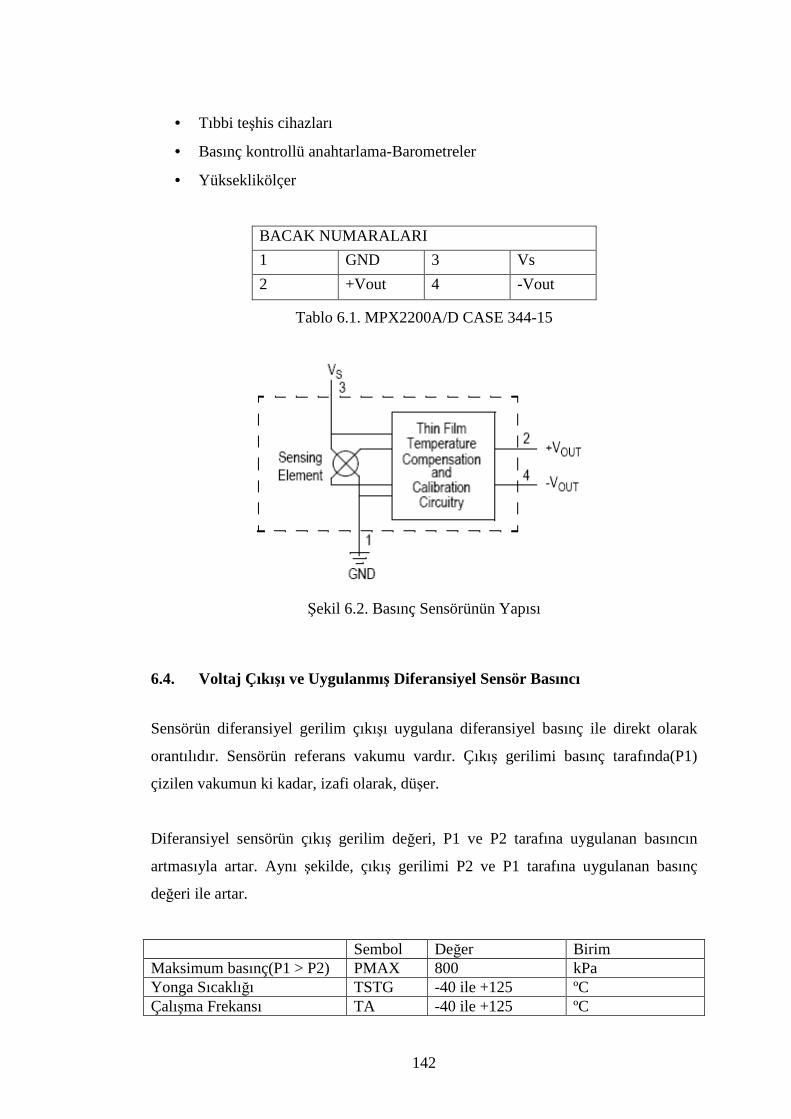
142
• Tıbbi teşhis cihazları
• Basınç kontrollü anahtarlama-Barometreler
• Yükseklikölçer
BACAK NUMARALARI
1 GND 3 Vs
2 +Vout 4 -Vout
Tablo 6.1. MPX2200A/D CASE 344-15
Şekil 6.2. Basınç Sensörünün Yapısı
6.4. Voltaj Çıkı şı ve Uygulanmış Diferansiyel Sensör Basıncı
Sensörün diferansiyel gerilim çıkışı uygulana diferansiyel basınç ile direkt olarak
orantılıdır. Sensörün referans vakumu vardır. Çıkış gerilimi basınç tarafında(P1)
çizilen vakumun ki kadar, izafi olarak, düşer.
Diferansiyel sensörün çıkış gerilim değeri, P1 ve P2 tarafına uygulanan basıncın
artmasıyla artar. Aynı şekilde, çıkış gerilimi P2 ve P1 tarafına uygulanan basınç
değeri ile artar.
Sembol Değer Birim Maksimum basınç(P1 > P2) PMAX 800 kPa Yonga Sıcaklığı TSTG -40 ile +125 ºC Çalışma Frekansı TA -40 ile +125 ºC
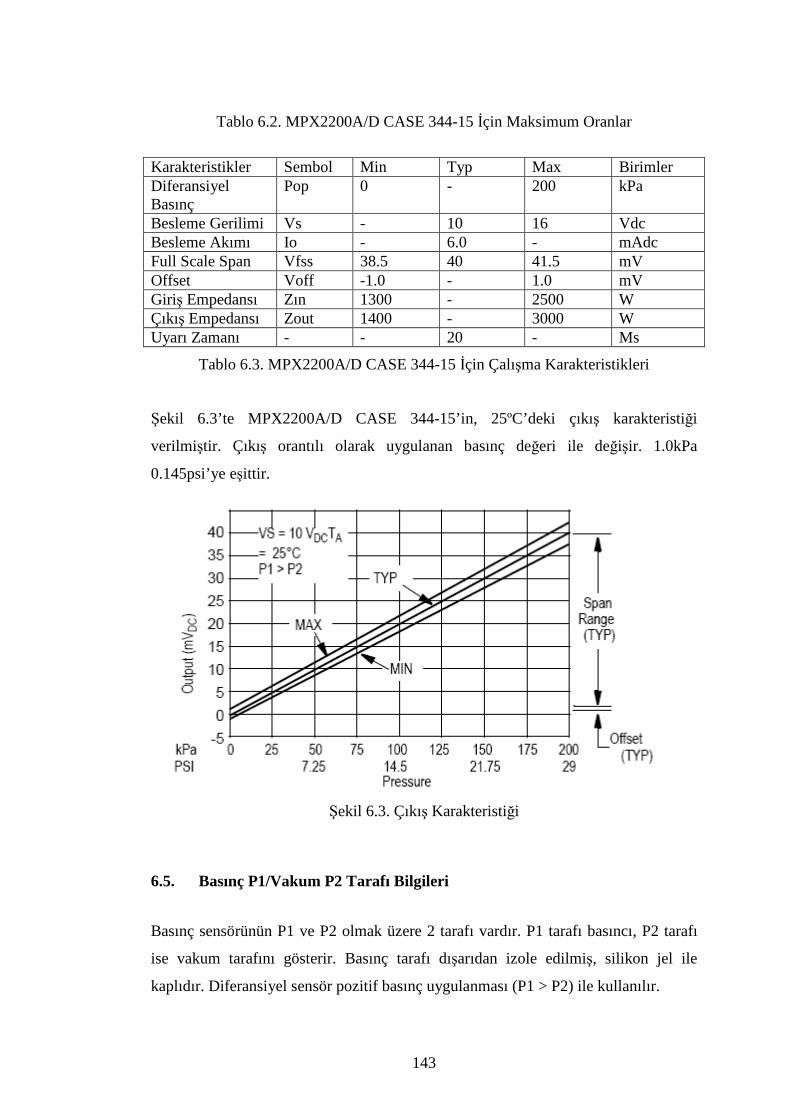
143
Tablo 6.2. MPX2200A/D CASE 344-15 Đçin Maksimum Oranlar
Karakteristikler Sembol Min Typ Max Birimler Diferansiyel Basınç
Pop 0 - 200 kPa
Besleme Gerilimi Vs - 10 16 Vdc Besleme Akımı Io - 6.0 - mAdc Full Scale Span Vfss 38.5 40 41.5 mV Offset Voff -1.0 - 1.0 mV Giriş Empedansı Zın 1300 - 2500 W Çıkış Empedansı Zout 1400 - 3000 W Uyarı Zamanı - - 20 - Ms
Tablo 6.3. MPX2200A/D CASE 344-15 Đçin Çalışma Karakteristikleri
Şekil 6.3’te MPX2200A/D CASE 344-15’in, 25ºC’deki çıkış karakteristiği
verilmiştir. Çıkış orantılı olarak uygulanan basınç değeri ile değişir. 1.0kPa
0.145psi’ye eşittir.
Şekil 6.3. Çıkış Karakteristiği
6.5. Basınç P1/Vakum P2 Tarafı Bilgileri
Basınç sensörünün P1 ve P2 olmak üzere 2 tarafı vardır. P1 tarafı basıncı, P2 tarafı
ise vakum tarafını gösterir. Basınç tarafı dışarıdan izole edilmiş, silikon jel ile
kaplıdır. Diferansiyel sensör pozitif basınç uygulanması (P1 > P2) ile kullanılır.
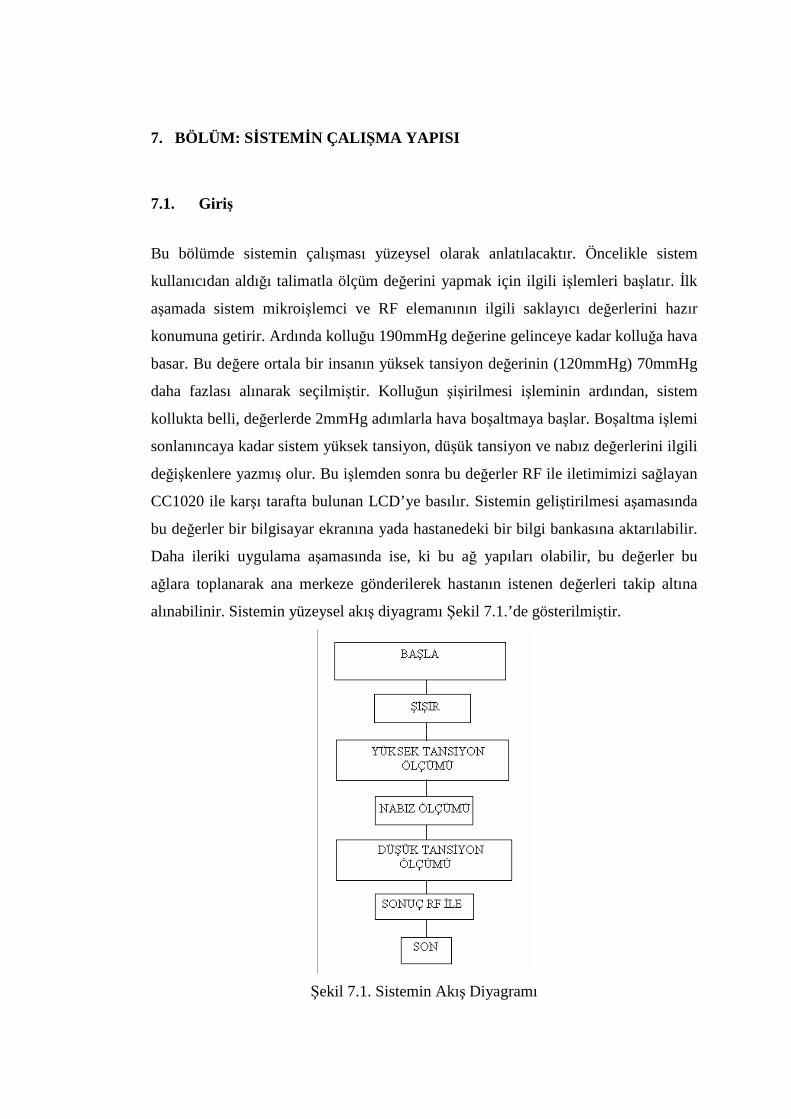
7. BÖLÜM: S ĐSTEMĐN ÇALI ŞMA YAPISI
7.1. Giri ş
Bu bölümde sistemin çalışması yüzeysel olarak anlatılacaktır. Öncelikle sistem
kullanıcıdan aldığı talimatla ölçüm değerini yapmak için ilgili işlemleri başlatır. Đlk
aşamada sistem mikroişlemci ve RF elemanının ilgili saklayıcı değerlerini hazır
konumuna getirir. Ardında kolluğu 190mmHg değerine gelinceye kadar kolluğa hava
basar. Bu değere ortala bir insanın yüksek tansiyon değerinin (120mmHg) 70mmHg
daha fazlası alınarak seçilmiştir. Kolluğun şişirilmesi işleminin ardından, sistem
kollukta belli, değerlerde 2mmHg adımlarla hava boşaltmaya başlar. Boşaltma işlemi
sonlanıncaya kadar sistem yüksek tansiyon, düşük tansiyon ve nabız değerlerini ilgili
değişkenlere yazmış olur. Bu işlemden sonra bu değerler RF ile iletimimizi sağlayan
CC1020 ile karşı tarafta bulunan LCD’ye basılır. Sistemin geliştirilmesi aşamasında
bu değerler bir bilgisayar ekranına yada hastanedeki bir bilgi bankasına aktarılabilir.
Daha ileriki uygulama aşamasında ise, ki bu ağ yapıları olabilir, bu değerler bu
ağlara toplanarak ana merkeze gönderilerek hastanın istenen değerleri takip altına
alınabilinir. Sistemin yüzeysel akış diyagramı Şekil 7.1.’de gösterilmiştir.
Şekil 7.1. Sistemin Akış Diyagramı
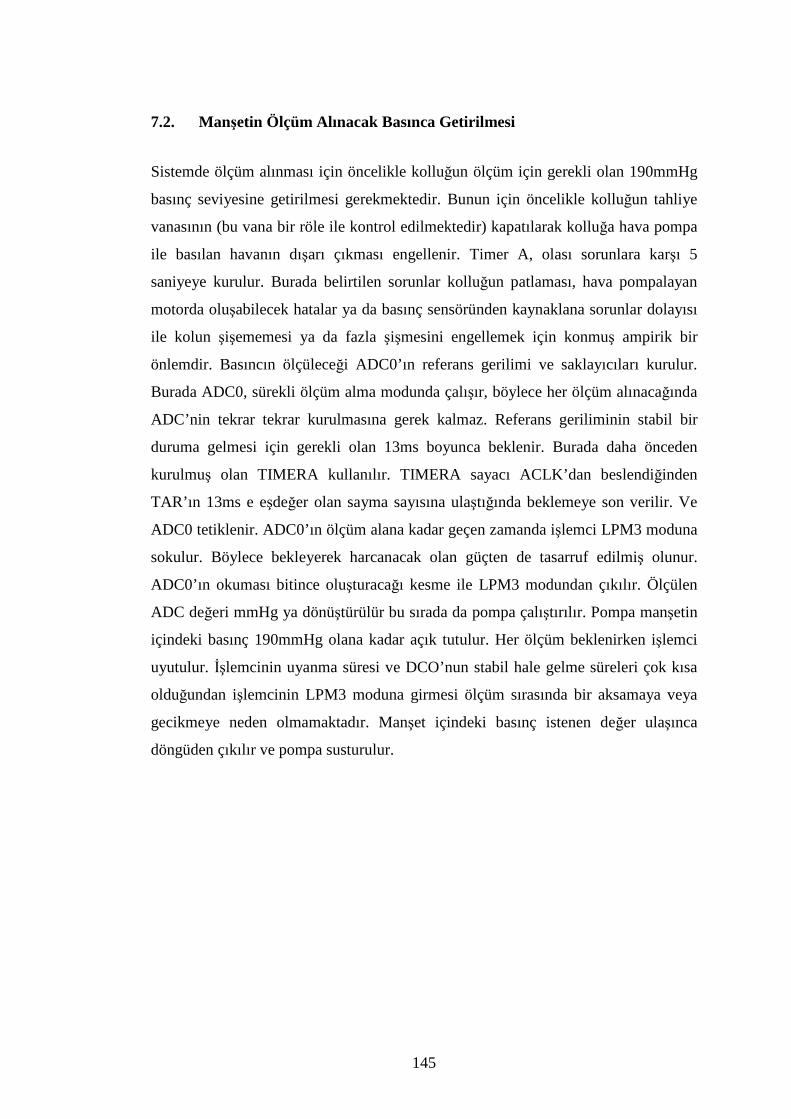
145
7.2. Manşetin Ölçüm Alınacak Basınca Getirilmesi
Sistemde ölçüm alınması için öncelikle kolluğun ölçüm için gerekli olan 190mmHg
basınç seviyesine getirilmesi gerekmektedir. Bunun için öncelikle kolluğun tahliye
vanasının (bu vana bir röle ile kontrol edilmektedir) kapatılarak kolluğa hava pompa
ile basılan havanın dışarı çıkması engellenir. Timer A, olası sorunlara karşı 5
saniyeye kurulur. Burada belirtilen sorunlar kolluğun patlaması, hava pompalayan
motorda oluşabilecek hatalar ya da basınç sensöründen kaynaklana sorunlar dolayısı
ile kolun şişememesi ya da fazla şişmesini engellemek için konmuş ampirik bir
önlemdir. Basıncın ölçüleceği ADC0’ın referans gerilimi ve saklayıcıları kurulur.
Burada ADC0, sürekli ölçüm alma modunda çalışır, böylece her ölçüm alınacağında
ADC’nin tekrar tekrar kurulmasına gerek kalmaz. Referans geriliminin stabil bir
duruma gelmesi için gerekli olan 13ms boyunca beklenir. Burada daha önceden
kurulmuş olan TIMERA kullanılır. TIMERA sayacı ACLK’dan beslendiğinden
TAR’ın 13ms e eşdeğer olan sayma sayısına ulaştığında beklemeye son verilir. Ve
ADC0 tetiklenir. ADC0’ın ölçüm alana kadar geçen zamanda işlemci LPM3 moduna
sokulur. Böylece bekleyerek harcanacak olan güçten de tasarruf edilmiş olunur.
ADC0’ın okuması bitince oluşturacağı kesme ile LPM3 modundan çıkılır. Ölçülen
ADC değeri mmHg ya dönüştürülür bu sırada da pompa çalıştırılır. Pompa manşetin
içindeki basınç 190mmHg olana kadar açık tutulur. Her ölçüm beklenirken işlemci
uyutulur. Đşlemcinin uyanma süresi ve DCO’nun stabil hale gelme süreleri çok kısa
olduğundan işlemcinin LPM3 moduna girmesi ölçüm sırasında bir aksamaya veya
gecikmeye neden olmamaktadır. Manşet içindeki basınç istenen değer ulaşınca
döngüden çıkılır ve pompa susturulur.
146
Şekil 7.2. Sistemin Akış Diyagramı
EXT INT
LPM OFF
RÖLE OFF
TIMER A KUR
TAR =13ms
READ ADC
POMPA ON
LPM3
BASINÇ HESAPLANMAS
P>190mmHg
ADC
POMP OFF
READ ADC1
H
H
E
E
7.3. Kan Basıncının Ölçümü
Genellikle, doktorlar hastanın atardamarındaki kan basıncını ölçümü esnasında
kolluk ve stethoscope kullanırlar. Ölçüm esnasında ilk olarak kolluğa hava
pompalarlar. Tabii bunu belli bir basınç değerine kadar yaparlar. Daha sonra hastanın
kan basıncını dinlemek için stethoscope denilen aleti kullanırlar. Başlangıçta
pompalanan hava basıncının, değeri yüksek(systolic) tansiyon değerinden fazla
olacak şekilde olmalıdır. Bu aşamada doktor stethoscopetan her hangi bir ses
duymaz. Basınç değeri düşürüldükçe doktor stethoscopetan kalp atışını duymaya
başlar. Bu aşamada ölçülen değer yüksek tansiyondur. Hava basıncı düşürüldükçe
doktor farklı karakteristikte kalp atış değerleri duymaya başlar. Her hangi bir noktada
ses kaybolmaya başlar. Đşte bu nokta düşük(diastolic) tansiyon değerine ulaşılır.
Ölçüm esnasında bizim sistemimizde “oscillometric” denilen ölçüm şekli
kullanılmıştır. Hava, ortalama yüksek tansiyon değeri olan 120mmHg basıncından
70mmHg fazla olacak şekilde kolluğa pompalanmıştır (190mmHg). Bundan sonra
ise hava basıncı yavaşça düşürülmeye başlanır. Bu düşürülme esnasında sistem
koldaki hava basıncındaki küçük dalgalanmaları (osilasyonları) ölçmeye başlar.
Yüksek tansiyon nabız atımlarının başladığı esnada olur. Bu arada MCU nabzın
hangi noktada başladığını ve kolluktaki basıncı kaydeder. Kolluktaki hava basıncı
düşürülmeye devam edilir. Düşük tansiyon ise kolluktaki nabzın dalgalanmasının
kaybolmaya başladığı anda alınmaya başlanılır.
7.4. Yüksek Tansiyonun Ölçümü
Kolluğa hava pompalama işlemi, 160mmHg’nın üzerinde gerçekleştirildikten sonra
kollukta bulunan hava boşaltma ünitesi devreye girdiği anda (aşağı yukarı sağlıklı
bir insanın yüksek tansiyon değerinden fazla olmalıdır) sistem Sys_Measure
konumuna geçer. Bu durumda, program ADC0 pinindeki, AC dalga formuna bakar.
Kolluktaki basınç değeri azaltıldığı anda kesin bir değere geldiği zaman kan koldan
akmaya başlar. Bu noktada yüksek tansiyon değeri elde edilir.
148
AC dalga formu için 4V değeri threshold değeri olarak seçilmiştir. Başlangıçta, sabit
değer 2.5V olan ADC0 pininde darbe yada gerilim değeri yoktur. yüksek tansiyon
değeri ölçülünceye kadar kollukta basınç değeri düşer. Osilasyon bu noktada başlar
ve yükselir. Bu noktadan sonra threshold geriliminden yüksek değerlerdeki
maximum darbeler sayılmaya başlar. Eğer program 4’ten fazla sayarsa program
Sys_cal durumuna girer. Bu durumda program ADC1 numaralı pinden DC gerilimi
kaydeder.daha sonra bu DC gerilim hastanın yüksek tansiyonun değerine
dönüştürülür.
Basınç sensörünün transfer karakteristikleri ve DC yükseltecin DC kazancı ADC1
numaralı pinin ucundaki DC gerilime bakılarak öğrenilir. ADC1 pininden okunan
DC gerilim değeri “DC_voltage” ve DC yükseltecin kazancı “DC_gain” olarak
belirtilmiştir. Böylece DC yükselteçten gelen diferansiyel gerilim değeri;
(7.1)
şeklinde hesaplanır. Bu değere sayesinde basınç gerilim karakteristiğinin olduğu
grafikten basınç değeri ölçülür. Bu eğrinin eğimi ise;
(7.2)
şeklinde bulunur. Böylece koldaki basınç değeri kPa birimi üzerinden;
(7.3)
şeklinde bulunur. Ardından, elde edilen değer mmHg’ya çevirmek için;
(7.4)
ile çarpılır. Böylece basınç mmHg şeklinde tam olarak şöyle hesaplanır;
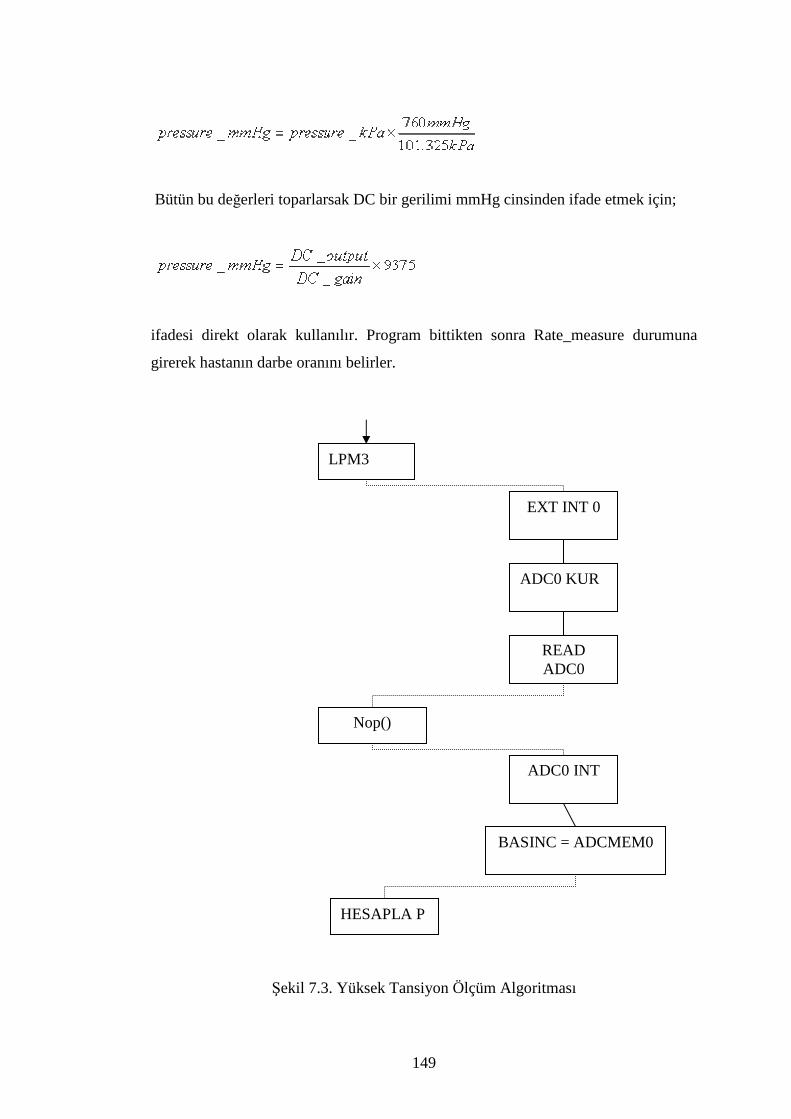
149
Bütün bu değerleri toparlarsak DC bir gerilimi mmHg cinsinden ifade etmek için;
ifadesi direkt olarak kullanılır. Program bittikten sonra Rate_measure durumuna
girerek hastanın darbe oranını belirler.
Şekil 7.3. Yüksek Tansiyon Ölçüm Algoritması
LPM3
EXT INT 0
ADC0 KUR
READ ADC0
Nop()
ADC0 INT
BASINC = ADCMEM0
HESAPLA P

150
7.5. Nabız Ölçümü
Program yüksek tansiyon değerini ölçtükten sonra hastanın darbe oranını göstermeye
başlar. Bu çalışmada darbe oranı yüksek tansiyon değeri ölçüldükten sonra
hesaplanması uygun görülmüştür bunun sebebi ise osilasyonun bu noktadaki dalga
formu en güçlü olmaktadır. Bu formdaki genlik değeri için ayarlanan referans
gerilimine bağlı olarak farksal yükseltecin referans gerilimi ile karşılaştırılan işaret
her periyodunda bir işaret oluşturur. Bu işaret de işlemci içinde bir kesme oluşturur.
Oluşan kesmelerin aralarındaki zaman ölçüldüğünde nabız atışının periyodu bulunur.
Şekil 7.3’de Nabız Ölçme Algoritması verilmiştir.
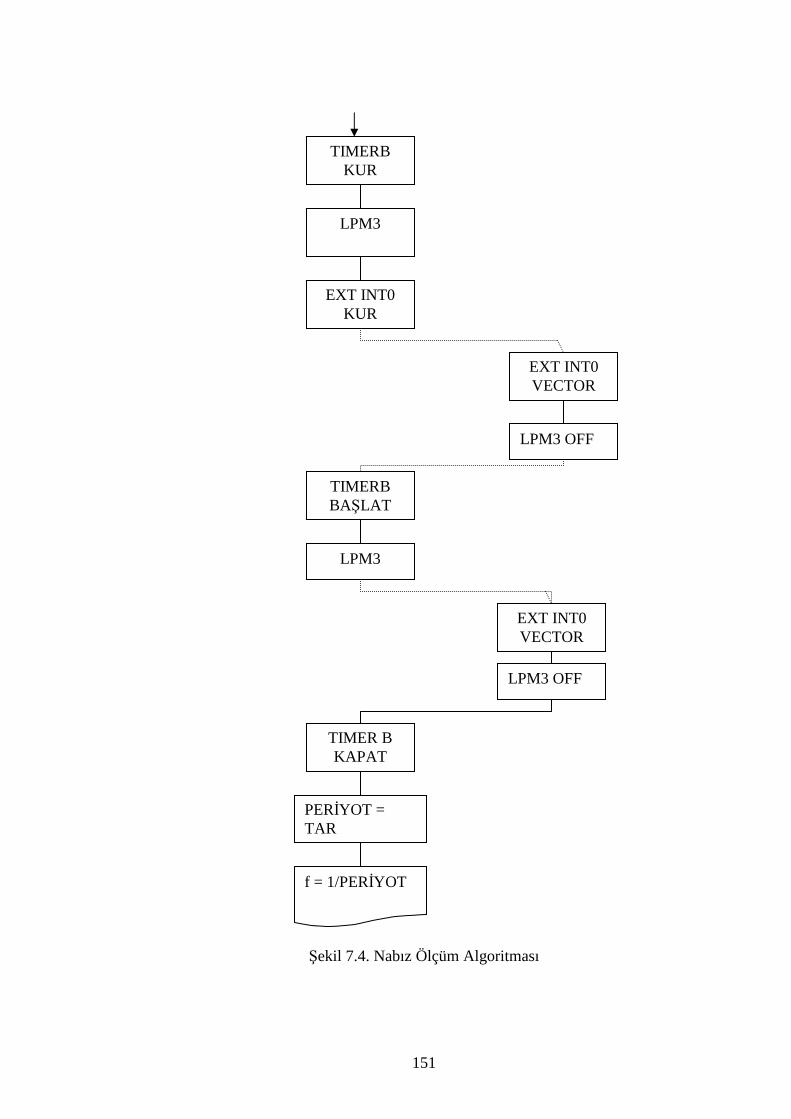
151
Şekil 7.4. Nabız Ölçüm Algoritması
TIMERB KUR
LPM3
EXT INT0 KUR
EXT INT0 VECTOR
LPM3 OFF
TIMERB BAŞLAT
LPM3
EXT INT0 VECTOR
LPM3 OFF
TIMER B KAPAT
PERĐYOT = TAR
f = 1/PERĐYOT
152
7.6. Düşük Tansiyonun Ölçülmesi
Darbe oranı bulunduktan sonra program Dias_measure durumuna geçer. Bu durumda
program her 40ms’de işareti örneklemeyi sürdürür. Ardından düşük tansiyon için
threshold gerilimi belirlenir. Kolluktaki basınç değeri düşürülünce, düşük tansiyon
basınç değerine gelmeden bir noktada, osilasyon değerindeki gerilim değeri düşmeye
başlar. Düşük tansiyon değerinin belirlenmesi için osilasyonun gerilim değeri
threshold gerilim değerinin altına düştüğü zaman bu noktadaki DC değer kaydedilir.
DC değer yüksek tansiyon değerinin ölçüm aşamalarında da belirtilen şekilde basınç
değeri mmHg cinsinden bulunur.
Düşük tansiyon değerinin ölçülmesi zor olup threshold değeri kişiden kişiye
değişiklik gösterir. Böylece, sistemimizde genel olarak kullanılan ölçüm
elemanlarında alınana threshold değerleri ile gerekli ölçümler sağlıklı bir şekilde
gerçekleştirilmi ştir.
Programın düşük tansiyon değerinin ölçüm işlemi bittikten sonra LCD’de ölçülen
değerler gösterilir. Daha sonra program kolluğun valfini açarak içerisindeki havanın
hızlı bir şekilde boşalmasını sağlar. Böylece ölçüm işlemi sonlanır.
7.7. Ölçüm Almadan Önce
- 10 dakika kadar sessiz ve sakin oturun, bu vücudunuzun normal ve dinlenme
pozisyonuna dönmesini sağlayacaktır.
- Tansiyonunuzu ortam ısısının ölçümü etkilemeyecek kadar sıcak veya soğuk
olmadığı bir yerde yapınız.
-Ölçümden hemen önce kahve gibi kafeinli bir içecek yada çay veya kola
içmediğinize emin olun ölçümden hemen önce sigara içmeyin sigara
içmişseniz 30-45 dakika beklemeniz gerekir..
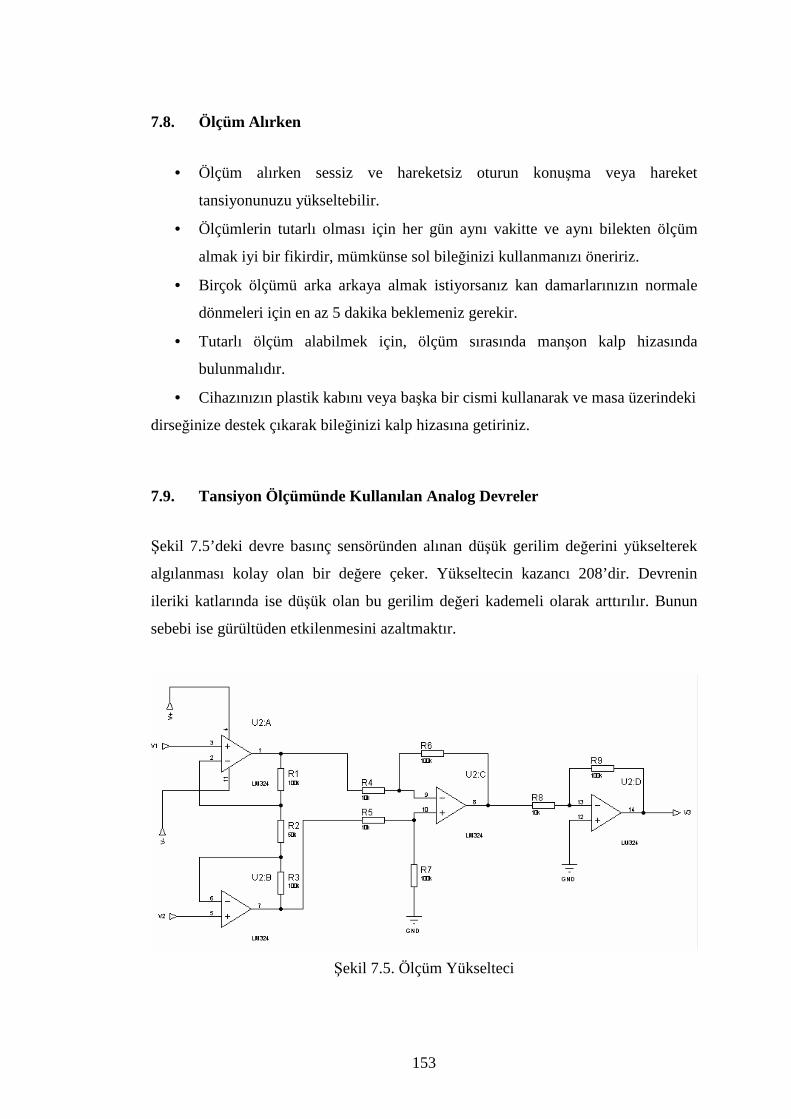
153
7.8. Ölçüm Alırken
• Ölçüm alırken sessiz ve hareketsiz oturun konuşma veya hareket
tansiyonunuzu yükseltebilir.
• Ölçümlerin tutarlı olması için her gün aynı vakitte ve aynı bilekten ölçüm
almak iyi bir fikirdir, mümkünse sol bileğinizi kullanmanızı öneririz.
• Birçok ölçümü arka arkaya almak istiyorsanız kan damarlarınızın normale
dönmeleri için en az 5 dakika beklemeniz gerekir.
• Tutarlı ölçüm alabilmek için, ölçüm sırasında manşon kalp hizasında
bulunmalıdır.
• Cihazınızın plastik kabını veya başka bir cismi kullanarak ve masa üzerindeki
dirseğinize destek çıkarak bileğinizi kalp hizasına getiriniz.
7.9. Tansiyon Ölçümünde Kullanılan Analog Devreler
Şekil 7.5’deki devre basınç sensöründen alınan düşük gerilim değerini yükselterek
algılanması kolay olan bir değere çeker. Yükseltecin kazancı 208’dir. Devrenin
ileriki katlarında ise düşük olan bu gerilim değeri kademeli olarak arttırılır. Bunun
sebebi ise gürültüden etkilenmesini azaltmaktır.
Şekil 7.5. Ölçüm Yükselteci
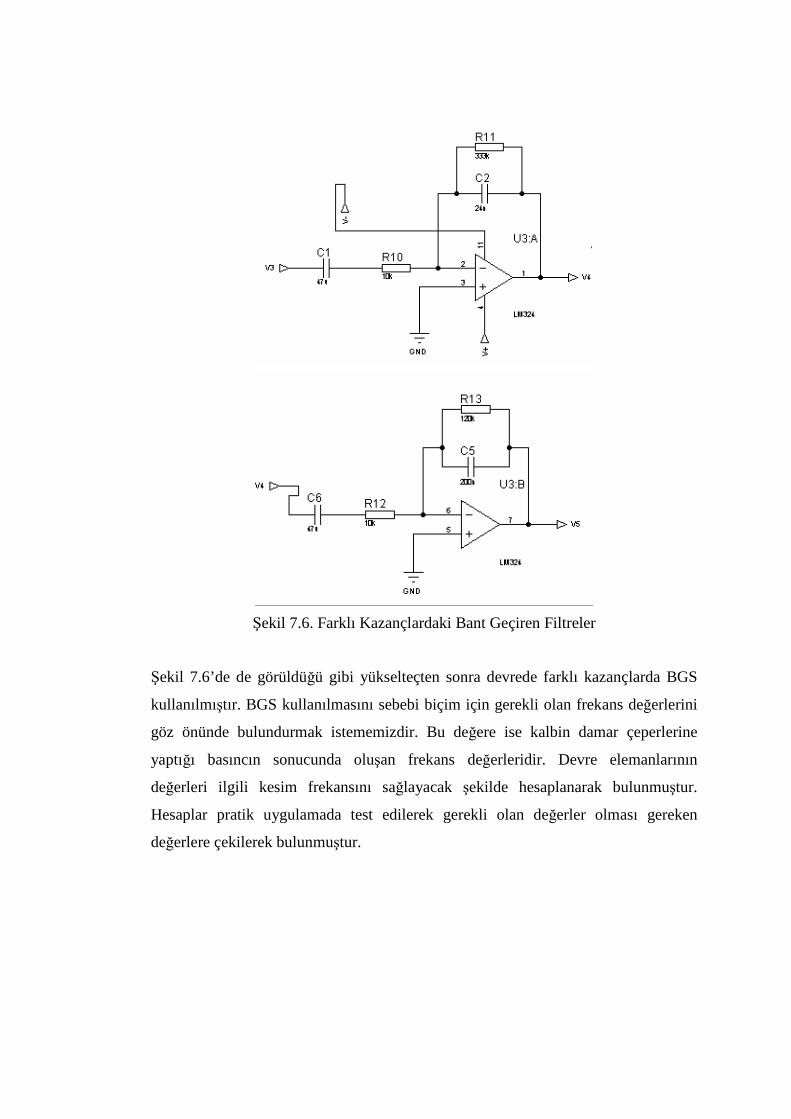
Şekil 7.6. Farklı Kazançlardaki Bant Geçiren Filtreler
Şekil 7.6’de de görüldüğü gibi yükselteçten sonra devrede farklı kazançlarda BGS
kullanılmıştır. BGS kullanılmasını sebebi biçim için gerekli olan frekans değerlerini
göz önünde bulundurmak istememizdir. Bu değere ise kalbin damar çeperlerine
yaptığı basıncın sonucunda oluşan frekans değerleridir. Devre elemanlarının
değerleri ilgili kesim frekansını sağlayacak şekilde hesaplanarak bulunmuştur.
Hesaplar pratik uygulamada test edilerek gerekli olan değerler olması gereken
değerlere çekilerek bulunmuştur.
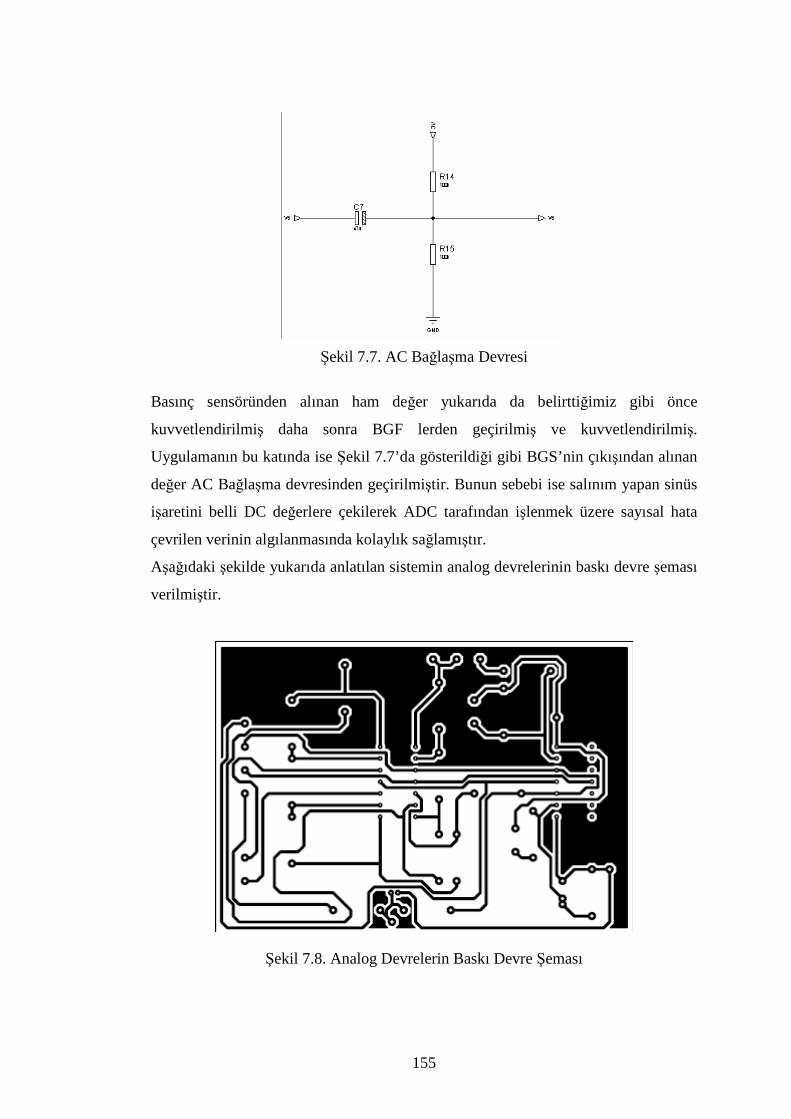
155
Şekil 7.7. AC Bağlaşma Devresi
Basınç sensöründen alınan ham değer yukarıda da belirttiğimiz gibi önce
kuvvetlendirilmiş daha sonra BGF lerden geçirilmiş ve kuvvetlendirilmiş.
Uygulamanın bu katında ise Şekil 7.7’da gösterildiği gibi BGS’nin çıkışından alınan
değer AC Bağlaşma devresinden geçirilmiştir. Bunun sebebi ise salınım yapan sinüs
işaretini belli DC değerlere çekilerek ADC tarafından işlenmek üzere sayısal hata
çevrilen verinin algılanmasında kolaylık sağlamıştır.
Aşağıdaki şekilde yukarıda anlatılan sistemin analog devrelerinin baskı devre şeması
verilmiştir.
Şekil 7.8. Analog Devrelerin Baskı Devre Şeması
8. BÖLÜM: MODÜLLER ĐN PROGRAM KODLARI
8.1. Fonksiyonlar Kütüphanesi Bu fonksiyonlar programın değişik yerlerinde kullanıldığından kütüphane haline
getirilip “functions.h” olarak her programın başında çağırılmıştır.
void Show_MCLK(void); //Debug amaçlı olup, master clock sinyalini P5.4
//pininden dışarı verir.
void SetMCLK_4MHz(void); //Master clock sinyalini 4 MHz’e ayarlar.(daha
önceden //elle kalibrasyon ile bulunmuş
saklayıcı değerleri //kullanılır.
void SetMCLK_1MHz(void); //Master clock sinyalini 1 MHz’e ayarlar
void SetSMCLK_1MHz(void); //SubMaster clock sinyalini 1 MHz’e ayarlar
void delay(unsigned int i); //bekleme fonksiyonu
void delay2(unsigned int i ,unsigned int j); //daha fazla beklemek için.
void TimerA(unsigned int Say); //timerA modülünün Say kadar sayılmasını
sağlar.
//----------------------------------------------------------------------------
void delay(unsigned int i)
//----------------------------------------------------------------------------
do
(i--);
__no_operation(); // _NOP();
while (i != 0);
//----------------------------------------------------------------------------
void delay2(unsigned int i ,unsigned int j)
//----------------------------------------------------------------------------
157
int k;
k=i;
for(;j!=0;j--)
i=k;
do
(i--);
__no_operation(); // _NOP();
while (i != 0);
//----------------------------------------------------------------------------
void SetSMCLK_1MHz(void)
//----------------------------------------------------------------------------
BCSCTL2 |= DIVS1; //Divider for MCLK 1.bit
//----------------------------------------------------------------------------
void SetMCLK_1MHz(void)
//----------------------------------------------------------------------------
DCOCTL |= 0xA0; //DCO = 5
BCSCTL1 |= 0x07; //RSEL = 7
//BCSCTL2 |= DIVM0; //Divider for MCLK 0.bit
BCSCTL2 |= DIVM1; //Divider for MCLK 1.bit
//----------------------------------------------------------------------------
void SetMCLK_4MHz(void)
//----------------------------------------------------------------------------
158
DCOCTL |= 0xA0; //DCO = 5
BCSCTL1 |= 0x07; //RSEL = 7
//BCSCTL2 |= DIVM0; //Divider for MCLK 0.bit
//BCSCTL2 |= DIVM1; //Divider for MCLK 1.bit
//----------------------------------------------------------------------------
void Show_MCLK(void) //Shows MCLK clock on P5.4 / pin48
//----------------------------------------------------------------------------
P5DIR |= 0x10;
P5OUT |= 0x10;
P5SEL |= 0x10;
//----------------------------------------------------------------------------
void TimerA(unsigned int Say) //timerA sayıcı modunda
//----------------------------------------------------------------------------
TACCR0 = Say;
TACTL |= (TASSEL_2 + TAIE + MC0); //Clock source = SMCLK,
Divider = 2 / //=>
500KHz
8.2. ADC Programı
Bu fonksiyon ile mikrodenetleyici içindeki sıcaklık sensöründen okunan değer
ADC12 modülüne giriş olarak verilmiş ve dijitale dönüştürülmüştür. Dönüştürülen
değer ADCMEM0’dan okunabilir.
#include <msp430x16x.h>
159
#include "functions.h"
#define TRUE 1
#define FALSE 0
void Init_Sys(void);
unsigned int temp;
unsigned int IntDegC;
int main( void )
Init_Sys();
SetMCLK_1MHz();
SetSMCLK_1MHz();
BCSCTL2 |= DIVS_3; //Divider for SMCLK = MCLK / 8 = 250KHz
ADC12CTL1 |= SHS_1 + SHP; //TA1, samp timer, rpt
ADC12MCTL0 |= SREF_1 + INCH_10; //VRef+, A10 temperature diode
//selected
ADC12IE |= 0x01;
ADC12CTL0 |= SHT0_7; //192cycle
TACCTL1 |= OUTMOD_3; //TOGGLE
TACCR1 |= 0x109A; //17000 us time to need a stabilized reference for adc
TACCR0 |= 0xFFF0; //262080 us ölçüm alma periyodu
TACTL = TASSEL_2 + MC_1 + TAIE; //SMCLK, up-mode, int enable.
while(1)
_BIS_SR(LPM0_bits + GIE);
IntDegC = (temp - 2692) * 423;
IntDegC = IntDegC / 4096;
_NOP();
160
#pragma vector = TIMERA1_VECTOR
__interrupt void TIMERA1_ISR (void)
ADC12CTL0 |= REFON + ADC12ON + ENC;
TACTL &= ~TAIFG;
#pragma vector = ADC_VECTOR
__interrupt void ADC12_ISR (void)
temp = ADC12MEM0; //IFG is cleared, too
ADC12CTL0 &= ~ENC;
ADC12CTL0 &= ~(REFON + ADC12ON);
P1OUT ^= 0x01;
_BIC_SR_IRQ(CPUOFF);
8.3. DCO Programı
#include <msp430x16x.h>
#include "functions.h"
void Init_Sys(void);
int main()
Init_Sys();
Show_MCLK();
SetMCLK_1MHz();
unsigned int i;
while(1)
P1OUT ^= 0x01;
161
i = 5000;
while (i--)
;
8.4. Donanımsal Çarpıcı Programı
#include <msp430x16x.h>
#include "functions.h"
/*3 MCLK sonucunda sonucu RESLO (16-bit) RESHI (16bit) ve SUMEXT
(extention) olarak verir*/
/*#define COMP_ (0x3000)
DEFW(COMP ,COMP_)*/
unsigned long int comp;
unsigned long int comp2;
int main()
SetMCLK_4MHz();
unsigned int a = 0xFFFF, b = 0xFFFF;
_DINT(); //Çarpma sırasındaki interrupt tanımsız kalıyor bunun için
çarpmalar //sonunda iptal ediyoruz..
MPY = a;
OP2 = b;
while(1)
;
_EINT();
return 0;
162
8.5. UART Programı
#include <msp430x16x.h>
#define TRUE 1
#define FALSE 0
void Init_Sys(void); //setup
void Init_uart0(void); //setup UART
unsigned int RxBuff;
int main(void)
_BIS_SR(GIE);
Init_Sys();
Init_uart0();
while (TRUE)
unsigned int i = 5000;
long j;
P1OUT ^= 0x01;
while (i--)
;
if (TXEPT && 0x01) // TXBUFF emtpy?
if (P1OUT & 0x01)
U0TXBUF = 'd';
else
U0TXBUF = 'a';
// IFG1 |= URXIFG0;
if(RxBuff == 'd' || RxBuff == 'a')
i = 2;
while (i--)
163
j = 100000;
while (j--)
P1OUT ^= 0x01;
void Init_uart0()
_BIC_SR(GIE); //Global interrupts disable
P3SEL |= 0x30; // P3.4,5 = USART0 TXD/RXD
ME1 |= 0xC0; // Module TX/RX enable
U0CTL = 0x19; // (8N1), No parity, 1 Stop Bit, 8Bit Char, listen
enabled,UART, //Held Reset
U0TCTL = 0x10; // SSEL = 01 = ACLK
U0BR0 = 0x03; // baud rate control is set by userguide
U0BR1 = 0x00;
U0MCTL = 0x4A; // Modlation Control is set by userguide
IE1 |= URXIE0; // RX interrupts enabled/TX Disabled
U0CTL |= SWRST; // swrst = 0 usart enabled
_BIS_SR(GIE); //Global interrupts enable
#pragma vector = USART0TX_VECTOR
__interrupt void USART0TXISR(void)

164
#pragma vector = USART0RX_VECTOR
__interrupt void USART0RXISR(void)
RxBuff = U0RXBUF;

165
9. SONUÇLAR ve ÖNERĐLER
Yapılmış olan uygulama çerçevesinde, sistem ölçmüş olduğu değerleri kablosuz
iletim tekniği ile diğer tarafta bulunan LCD panele ilgili veriler iletilmiştir. Sistem
ileriki uygulamalarda ihtiyaca bağlı olarak vücut sıcaklığı, kanın oksijen miktarı, vb.
gibi parametreler sisteme entegre edilebilir. Smart sensörlerin ileriki uygulamaları
olarak birden çok modül kullanılarak sensör ağları oluşturulabilir. Böylece insanların
bu gibi değerleri sürekli olarak belli bir yerde kayıt altına alınarak hasta takip sistemi
olarak kullanılabilir.
166
KAYNAKLAR
[1] Dr. Takoi K. Hamrita, Kurt L. Wolfe, Nivedita P. Kaluskar, “Advances in Smart
Sensor Technology”
[2] www.ieee.org
[3] E. Yazgan, M. Korurek, "Tıp Elektroniği", ĐTÜ Yayınları 1966, ISBN 975-561-
073-1
[4] How to measure the blood pressure
http://www.drbloodpressure.com/05-mesurer8.shtml
[5] Davıd Prutchı, Mıchael Norrıs, “Desıgn And Development Of Medıcal Electronıc
Instrumentatıon”, ISBN 0-471-67623-3
[6] CC1020 CHIPCON Application Notes ve Datasheets
[7] MSP430F169 Texas Instruments Application Notes
[8] www.iar.com (MSP430XX Derleyicisi Đçin)
[9] www.freescale.com ( MPX2200 datasheet, applications )
[10] Ramon Pallas-Areny and John G. Webster, Sensors and Signal
Conditioning, John Wiley, New York, 1991.
[11] Harry L. Trietley, Transducers in Mechanical and Electronic
Design, Marcel Dekker, Inc., 1986.
[12] Dan Sheingold, Analog-Digital Conversion Handbook, Third Edition,
Prentice-Hall, 1986.
[13] P. Malcovati, C. Azeredo Leme, P. O’Leary, F. Maloberti, and H. Baltes ”Smart
Sensor Interface with A/D Conversion and Programmable Calibration”, Ieee Journal
Of Solid-State Circuits, Vol. 29, No. 8, August 1994
[14] M. Mozek, D. Vrtacnik, D. Resnik, U. Aljancic, M. Cvar, S. Amon “Calibration
and Error Correction Algorithms for Smart Pressure Sensors”, IEEE MELECON
2002, May 7-9,2002, Cairo, EGYPT
[15] W. Sansen, A. Claes, D. De Wachter, L. Callewaert, and M. Lambrechts “A Smart Sensor For Biomedical Applications