Embed Size (px)
Citation preview

书书书
第40卷 第3期Vol.40 No.3
山 东 大 学 学 报 (工 学 版)JOURNALOFSHANDONGUNIVERSITY(ENGINEERINGSCIENCE)
2010年6月 Jun.2010
Receiveddate:20091228Foundationitem:ThisresearchwassupportedbyNSF,USABiography:SHENGWeihua(1972),male,Ph.D.,assistantprofessor,hisresearchinterestsincludehumanrobotinteraction,wearablecomputing
andmobilesensornetworks.Email:weihua.sheng@okstate.eduZHUChun(1983),female,Ph.Dstudent,herresearchinterestsincludehumanbehaviorrecognitionandhumanrobotinteraction.Email:chunz@okstate.edu
文章编号:16723961(2010)03003714
Awearablecomputingapproachforhandgestureanddailyactivityrecognitioninhumanrobotinteraction
SHENGWeihua,ZHUChun(SchoolofElectricalandComputerEngineering,OklahomaStateUniversity,Stillwater,OK,74078,USA)
Abstract:Humanrobotinteraction(HRI)isanimportanttopicinrobotics,especiallyinassistiverobotics.Inthispaper,weaddressedtheHRIprobleminasmartassistedliving(SAIL)systemforelderlypeople,patients,andthedisabled.TwoproblemswereslovedthatareveryimportantfordevelopingnaturalHRI:handgesturerecognitionanddailyactivityrecognition.Fortheproblemofhandgesturerecognition,aninertialsensoriswornonafingerofthehumansubjecttocollecthandmotiondata.AneuralnetworkisusedforgesturespottingandatwolayerhierarchicalhiddenMarkovmodel(HHMM)isappliedtointegratethecontextinformationinthegesturerecognition.Fortheproblemofdailyactivityrecognition,twoinertialsensorsareattachedtoonefootandthewaistofthesubject.Amultisensorfusionschemewasdevelopedforrecognition.First,datafromthesetwosensorsarefusedforcoarsegrainedclassification.Second,thefinegrainedclassificationmodulebasedonheuristicdiscriminationorhiddenMarkovmodels(HMMs)areappliedtofurtherdistinguishtheactivities.Experimentswereconductedusingaprototypewearablesensorsystemandtheobtainedresultsprovedtheeffectivenessandaccuracyofouralgorithms.Keywords:humanrobotinteraction;hiddenMarkovmodel;neuralnetworks
人机交互中基于可穿戴式计算的
手势和活动辨识
盛卫华,祝纯(俄克拉荷马州立大学电气与计算机学院,美国 俄克拉荷马州 止水市 74078OK)
摘要:人与机器人交互是机器人技术领域、尤其是生活辅助机器人领域的重要课题。本文以辅助老年人、病人和
残疾人为应用背景,提出了“智能辅助生活系统”(SAILSystem),并解决了该系统中人的手势识别和日常动作识别两个重要问题。对于手势识别问题,本文采用一个惯性传感器来采集被试验人手指部位活动的信号,运用人工
神经网络进行手势捕捉,并应用一个分层隐马尔可夫模型结合前后手势的关联信息,来提高手势识别的准确率。
对于动作识别问题,数据来源于位于被试验人一侧的脚面和腰部的两个惯性传感器,并采用多传感器融合方法识
别各种日常动作。在对两个传感器的数据进行融合的粗分类之后,细分类应用了隐马尔可夫模型和启发式方法
来进一步识别各个动作类型。该穿戴式传感器系统经过实验测试,结果证明了本识别算法的有效性和精确性。
关键词:人与机器人交互;隐马尔可夫模型;神经网络
中图分类号:TP391.4 文献标志码:A

38 山 东 大 学 学 报 (工 学 版) 第40卷
1 Introduction
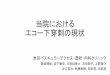
11 Motivation Thepastdecadehasseenasteadygrowthofelderlypopulation.Thebabyboomerscomprisenearly20percentoftheU.S.population,whichisequalto761millionAmericans[1].In2010manyofthemwillturn65andarepronetohealthcomplications.Thismaycauseanincreasedburdenonthemedicalindustry.Comparedtotherestofthepopulation,moreseniorslivealoneasthesoleoccupantsofaprivatedwellingthananyotherpopulationgroup.Therefore,elderlypeoplelivingaloneareanatriskgroup.Helpingthemtoliveabetterlifeisveryimportantandhasgreatsocietalbenefits. Manyresearchersareworkingonnewtechnologiessuchasassistiverobotstohelpelderlypeople.Haighetal.[2]providedasurveyonassistiverobotsusedascaregivers.Themainstream ofassistiveroboticsresearchfocusesonmanipulatingassistancedevicessuchasgripperstohelppeopleeat,electronictravelaidstoguidepeopletowalk,andintelligentwheelchairstomovepeoplearound.Inrecentyears,severalresearchershaveenvisionedacompanionrobotthatliveswithpeoplelikeapet.Forexample,Haaschetal.[3] developed theBielefeld RobotCompanionwhichcommunicateswithnonexpertusersinanaturalandintuitiveway.Fritschetal.presentedSIRCLE[4],asysteminfrastructureprovidingasoftwareplatformforarobotcompanionwhichexhibitspowerfulcapabilitiesinhumanrobotinteraction(HRI)[5]. Wearedevelopingasmartassistedliving(SAIL)system[67]toprovidesupporttoelderlypeopleintheirhousesorapartments.AsillustratedinFigure1,theSAIL system consistsofabodysensornetwork(BSN)[8],acompanionrobot,asmartphone,andaremotehealthprovider.Thebodysensornetworkcollectsmotiondataandvitalsignsofthehumansubjectandsendsthemwirelessly(forexample,throughZigbee[9])tothecompanionrobot,whichinfersthehumanintentionsandconditionsfromthesedataandrespondscorrespondingly.Thesmartphoneservesasagatewaytoaccesstheexpertiseofremotehealthcareproviders,ifneeded.Forexample,whenthereisa
detectedmedicalemergencyormishapsuchasfallingdownonthefloor,theremotehealthprovidercancontrolthecompanionrobottoobserveandhelpthehumansubjectthroughawebbasedinterfaceandajoystick.
Fig.1 Theoverviewofthesmartassistedliving(SAIL)system
Thebodysensornetworkconsistsofwearablesensornodesattachedtothechest,oneoftheankles,thewaistandoneofthefingersofthehumansubject,respectively.Suchaminimalsetofsensornodesreducestheobtrusivenesstotheminimum.Eachnodehasaminiaturemicrocontroller,aZigbeecommunicationmoduleaswellasaninertialsensorandtheassociatedsignalconditioningcircuits.Theinertialsensorconsistsofa3axisaccelerometer,a3axisgyro,andacompass.Additionally,inordertocollectthevitalsignsofthehumansubject,thechestnodehasamicrophoneandatemperaturesensor,whilethefingernodehasabloodpressuresensorandapulseoximeter. Naturalhumanrobotinteractionisaveryimportantissueinthedesignofassistiverobotics,especiallyforelderlypeople,whousuallysufferfrom problemswithspeech[10],orhavedifficultyinlearningnewcomputerskills[11],thereforeitisdesirabletomaketherobotabletonotonlyunderstandexplicithumanintentionsfromgestures,butalsorecognizethehumandailyactivities,fromwhichimplicithumanintentionsmaybeinferred.Sucharobotcapabilityiscalledconsiderateintelligence[67].Inthispaper,we

第3期 SHENGWeihua,etal:Awearablecomputingapproachforhandgestureanddailyactivityrecognitioninhumanrobotinteraction 39
focusonsolvingtwoproblemscentraltonaturalHRI:handgesturerecognitionandhumandailyactivityrecognition.Comparedtotheexistingwork,wemadetwomaincontributions:(i)wedevelopedalightweightandresourceawarehandgesturerecognitionalgorithmthatconsidersthecontextinformationrepresentedbythesequentialconstraintsbetweendifferentcommands;(ii)wedevelopedamultisensorfusionschemeforaccuratedailyactivityrecognition. Thispaperisorganizedasfollows.Therestofthissectionintroducessomerelatedworkinhandgesturerecognitionandhumandailyactivityrecognition.SectionIIdevelopsthealgorithmforhandgesturerecognition.SectionIIIdescribesthealgorithmforhumandailyactivityrecognition.TheexperimentaltestsandresultsarepresentedinSectionIV.ConclusionsaregiveninSectionV.1.2 Relatedwork Researchershavemadesignificantprogressintheareaofhumanrobotinteractioninrecentyears.AcomprehensivesurveyofthisareaisprovidedbyYancoetal.[5,12].TheycategorizedtheexistingHRIresearchbasedoncriteriasuchasautonomy,intervention,humanrobotratio,andinteraction.AshandgesturerecognitionandhumandailyactivityrecognitionareessentialtonaturalHRI,wearegoingtoreviewsomerelatedworkinbothareas.121 Handgesturerecognition Traditionalgesturerecognitionisbasedonvisualinformation.Atypicalapproachforvisionbasedgesturerecognitionhastwosteps:first,featureextractionusingcolordetection,edgedetection,andbackgroundremovingtechniques,etc;second,patternrecognitionusingmachinelearningalgorithms,suchashiddenMarkovmodels(HMMs)[13]andneuralnetworks[14].Moreworksinthisareacanbefoundin[15]. Recently,duetotheadvancementinMEMsandVLSItechnologies,wearablesensorbasedgesturerecognitionhasbeengainingattention.Comparedtovisionbasedgesturerecognition,wearablesensorbasedrecognitionhastwoadvantages.First,forvisionbasedgesturerecognition,camerasneedtobeinstalledpriortotheexperimentsandenvironmentalconditions(brightness,contrastandobstacles,etc)havesignificantimpactsontheimagedata.Onthe
contrary,wearablesensorswillnotbeaffectedbytheirsurroundings.Second,wearablesensorbasedgesturerecognitionrequireslessdatacomparedtovisionbasedrecognition.Typicalwearablesensorsincludeinertialsensorsandglovesensors[1617].Otherwearablesensorssuchasmicrophones,barometers,andthermometerscanprovidecomplementaryinformationinwearablesensorsystems[18]. Thereissomeexistingworkonhandgesturerecognitionfromvideodatasources.However,thereisnotmuchworkonrecognitionusingwearablesensorasadatasource.Animportantproblemingesturerecognitionistosegmentgesturesfromnongesturesmovements,whichiscalledthegesturespottingproblem[19].Therearetwomainmethods:rulebasedmethodsandHMMbasedmethods.Rulebasedmethodsarewidelyusedinvisionbasedrecognition.Someresearchersuseaspecialpositiontomarkthestartorendpointofagesture[20],whileothersdefinerulesforthebehaviorbeforeorafteragesture[21],suchasstayingstillforseveralseconds.Ramamoorthyetal.[20]implementedamethodthatmovedthehandinandoutofthesightofacameratorepresentthestartandendpointofagesture.Lenmanetal.[21]
definedgestureswhichconsistofastartpose,atrajectory,andaselectionpose.HMMbasedmethodsmaximizethelikelihoodintimeseriessignalsusingdifferenthiddenMarkovmodelsthatrepresentdifferentclassesofdata[2223].Leeetal.[22]introducedathresholdmodelthatcalculatesthelikelihoodthresholdofaninputpatternandprovidesaconfirmationmechanismfortheprovisionallymatchedgesturepatterns.Overall,therulebasedmethodsareeasytoimplementbutarenotconvenientforelderlypeopletouse.TheHMMbasedmethodsdonothavesuchrequirementforthehumansubject.However,thecomputationalcostishighduetotheuseofHMMs.122 Humandailyactivityrecognition Manysolutionshavebeendevelopedforhumandailyactivityrecognitionovertheyears,includingtheheuristicanalysismethods[2425],thediscriminativemethods[2627],thegenerativemethods[13],andsomecombinationsofthesemethods[28]. Heuristicanalysismethodsarebasedonthedirectcharacteristicanalysisandthedescriptionofthedata

40 山 东 大 学 学 报 (工 学 版) 第40卷
fromsensors.Forexample,Aminianetal.[24]developedanalgorithmbasedontheanalysisoftheaverageandthedeviationoftheaccelerationsignaltoclassifytheactivitiesintofourcategories:lying,sitting,standingandlocomotion.Discriminativemethodsanalyzefeaturesextractedfrom sensordatasegmentationswithoutconsideringsequentialconnectionsinthedata.Forexample,in[29],principalcomponentsanalysis(PCA)[30]andindependentcomponentanalysis(ICA)[31] areusedinthefeaturegenerationprocesswithwavelettransform ofthesensordata.Generativemethodsusegenerativemodelsfortheprobabilitybasedobservationswithhiddenparameters.Itspecifiesajointprobabilitydistributionoverobservationandlabelsequences.Forexample,DeVauletal.[32]developedatwolayermodelthatcombinesamulticomponentGaussianmixturemodel[33]
withMarkovmodelstoaccuratelyclassifyarangeofuseractivitystates,includingsitting,walking,andbiking.Bycombiningdifferentmethods,theadvantagesofeachmethodcanbebetterutilizedtosolvecomplicatedproblems.Lesteretal.[28] presentedahybridapproachtorecognizehumandailyactivities,whichcombinesboosting[34]andHMM.Boostingisusedtodiscriminativelyselectusefulfeatures,andtheHMMisusedtorecognizedifferentactivities. Tosummarize,heuristicanalysismethodsrequireintuitiveanalysisontherawsensordataorthefeaturesfrom data,andthecharacteristicsmaydifferfromeachindividual.Therefore,itisdifficulttofindaubiquitouswayforobservation.Onthecontrary,sincediscriminativemethodsandgenerativemethods
aremachinelearningalgorithms,theparameterscanbetrainedusingdatafromdifferentindividuals.However,theirdisadvantageisthehighcomputationalcost.Thecombinationofdifferentmethodscanachievebetterperformancethananysinglemethod.
2 Handgesturerecognition
InourSAILsystem,differenthandmovementpatternsareusedtocommandthecompanionrobot,muchlikethewaypeoplecommandadog.Fivebasichandgesturesareassignedtofivecommandswhichmean“come”,“gofetching”,“goaway”,“sitdown”,and“standup”,respectively.Inthissection,wewilldiscussouralgorithmforhandgesturerecognition,whichcombinestheneuralnetworkbasedgesturespottingandthehierarchicalhiddenMarkovmodel(HHMM)basedgestureclassification. Sincemostembeddedcomputingsystemshavelimitedbatteriesandcomputationpower,itisimportanttodesignrecognitionalgorithmsthatareresourceawareandlightweight.AsshowninFigure2,therecognitionalgorithmconsistsoftwomodules:(1)thesegmentationmodulewhichusesaneuralnetworktorealizegesturespotting,and(2)therecognitionmodulewhichusesanHHMM toclassifygestures.SincetheHHMM isaprobabilisticmodelwithhighcomputationalcost,theNNbasedsegmentationmoduleisusedasaswitchtocontrolthedataflowinordertosavethecomputationtimeandincreasetheefficiency.
Fig.2 Theflowchartofthehandgesturerecognitionalgorithm
Aneuralnetworkisappliedinthesegmentationmodule to discriminate gesturesfrom ongesturemovements.Wefindthatsimplyusingasinglethresholdonthesensordatacannotclassifygestures
andnongesturemovementsaccurately.Onthecontrary,theneuralnetworkisacombinationofmultiplethresholdsfordifferentfeatures.Throughthetrainingoftheneuralnetwork,theweightsandbiasescanbe

第3期 SHENGWeihua,etal:Awearablecomputingapproachforhandgestureanddailyactivityrecognitioninhumanrobotinteraction 41
optimizedforclassification.Furthermore,theneuralnetworkisamachinelearningalgorithm,whichcanobtainhiddeninformationfromthetrainingdataandmakeagoodcombinationoffeaturestoperformtheclassificationforgesturesand nongesturemovements. Inourexperiments,therawsensordataaresampledat150Hz,andawindowof20points(133ms)isappliedonittoextractfeaturevectors,whicharefedintotheneuralnetworktodistinguishgesturesandnongesturemovements.Then,aheuristicthresholdforthetimedurationofthesameoutputoftheneuralnetworkisusedinthesegmentationmoduletodetectthestartorendpointofthegesture.TheoutputofthesegmentationmoduletriggerstheHHMMbasedrecognitionmodulewhenagestureisspotted.2.1 Gesturespottingusinganeuralnetwork Weimplementedathreelayerfeedforwardneuralnetwork[14]todistinguishgesturesfromdailynongesturemovements.Theinputisafeaturevectorextractedfromtherawsensordata.Inourcurrentimplementation,3Dangularvelocity[ωx,ωy,ωz]
Tand3Dacceleration[ax,ay,az]
Tarerecordedastherawsensordata.Weusethefollowingfeatures: · the6Dmean[珚ωx,珚ωy,珚ωz,珔ax,珔ay,珔az]
T,
· the6Dvariance[σ2ωx,σ2ωy,σ
2ωz,σ
2ax,σ
2ay,σ
2az]
T. Theoutputoftheneuralnetworkisbinary(1or0),whichstandsforgesturesornongesturemovements,respectively.Theneuralnetworkfunctionsofthefirstandthesecondlayersarethelogsigmoidfunctionsandthethirdlayerhasthehardlimitfunction[14].Thefirstandthesecondlayersforma2layerfeedforwardnetwork,andtheoptimizedparametersareobtainedthroughtraining.Intheoutputlayer,theweightsandbiasesarefixedtogeneratediscreteoutputs. Supervisedlearning[14]isusedtotraintheneuralnetworkfromthelabeledtrainingdata.Inordertoavoidthetrainingtrappedinthelocalminimum,werunthetrainingseveraltimestoachievelessmeansquareerror.Thenumberofneuronsineachlayeriscarefullyselectedforbetteraccuracyandavoidingoverfittingaswell. Inourcurrentimplementation,weassumethatnongesturemovementsareslow becausewhenpeople
read,write,walk,andeat,theirhandsdonotexhibitintensivemotions.Forunexpectedmovementsandrapidnongesturemovements,wecanuseathresholdbasedHMM likelihooddiscriminant[22]todistinguishwhetheritisagestureornotinthefuture.22 HHMMbasedrecognitionalgorithm Inthissection,wewillfirstintroducethebasicconceptsofHMMs,andthendescribetheHHMMbasedhandgesturerecognitionmethodthatconsidersthesequentialconstraintsinhandgestures. Peopleusuallydemonstratespecificpatternswhentheyinteractwiththeirpets.Suchpatternsreflectthesequentialconstraintsinthegestures,whichcanbeusedtoimprovethegesturerecognitionaccuracy.Inthispaper,thehierarchicalhiddenMarkovmodel(HHMM)techniqueisimplementedinordertoincreasetherecognitionaccuracy.TheHHMMisastatisticalmodelderivedfromthehiddenMarkovmodel.Werecognizegesturesthroughtwosteps:first,usetheHMMsatthelowerleveltorecognizeindividualhandgestures;second,modeltheconstraintsamongthegestureswiththeupperlevelHMM andestimatethemostlikelystatesequenceintheupperlevelHMMtocorrectclassificationerrorswhicharemadeinthelowerlevelHMM.HiddenMarkovmodelsarestatisticalmodelsforsequentialdatarecognition.Ithasbeenwidelyusedinspeechrecognition,handwritingrecognition,andpatternrecognition[13].AnHMMischaracterizedbyasetofparametersλ=(A,B,π),whereA,B,andπarethestatetransitionprobabilitydistribution,theobservationsymbolprobabilitydistributionsineachstate,andtheinitialstatedistribution,respectively.Theforwardbackwardprocedure[3536]isusedinordertoestimatethelikelihoodP(O|λ)ofasequenceofobservationsgivenaspecificHMM.TheViterbiAlgorithm[37]isusedtofindthesinglebeststatesequenceQforthegivenobservationsequenceOinthetestingmode.TheEM(expectationmaximization)method[38] isusedtotraintheparametersofHMM.221 HMMbasedindividualhandgesturerecogni
tion WepreprocesstherawsensordatatoextractthefeaturesforgestureclassificationinthelowerlevelHMM,whichhastwophases:thetrainingphaseand

42 山 东 大 学 学 报 (工 学 版) 第40卷
therecognitionphase.Eachrawsensordataisa6componentvector:
u=[ωx,ωy,ωz,ax,ay,az]T
Alowpassfilterisusedtoremovehighfrequencynoise.Then,aslidingwindowof20pointsofthe3axisacceleration(about133msinthetimedomain)isusedtocalculatethetimeaverageinordertoremovetheDCcomponentsandgeneratethedeviationvector[dx,dy,dz]
T.WeapplytheFFTonthisvectortoanalyzethepowercomponentsinthefrequencydomainandfindthefundamentalfrequencyofthegesture.Therearefourstepsinthetrainingphase. Step1:Findthestrokeduration.Inthetrainingphase,thehumansubjectneedstorepeatthesamegestureseveraltimestogetthematricesforonesetofHMMparameters.Inordertofindthestrokedurationofthegesture,theFFTisappliedtothedeviationvector[dx,dy,dz]
T.Thefrequencywiththemaximumpoweramongthex,y,andzischosenasthefrequencyofthegesture,fromwhichwecangetthestrokedurationofthisgestureforfurtheruse. Step2:Quantifythevectorsintoobservationsymbols.TheKmeansclusteringisappliedonthe6Dvectorsutogetthepartitionvalueforeachvectorandalsoasetofcentroidsforclusteringthedataintoobservationsymbolsintherecognitionphase. Step3:SetuptheinitialHMMparameters.Setthenumberofstatesinthemodel,thenumberofdistinctobservationsymbolsperstateandtheinitialvalueofλ=(A,B,π)foriteration. Step4:IterateforEM.TheE(Expectation)stepisthecalculationoftheauxiliaryfunctionQ(λ,珔λ)[13],andtheM(Maximization)stepisthemaximizationofthelikelihoodover珔λ.Thisprocessisiterateduntilthelikelihoodapproachesasteadyvalue. Figure3showstheflowchartforindividualhandgesturerecognition.Thedatapreprocessingisappliedonthedatawindowandthecentroidsaretrainedtoquantifythevectorsintoobservablesymbols.Aslidingwindowof1secondmovesalongthedatasequenceandthelikelihoodundereachsetofHMMparametersisestimated.Wechoosethemodelwhichachievesthemaximumlikelihoodtobetherecognizedtype.Thus,thisHMMbasedrecognitiongivesaseriesofdecisionsforthesegmentedgesture.
Fig.3 TheflowchartoftheHMMbasedindividualhandgesturerecognition
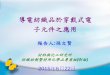
Next,themajorityvotingisappliedontheoutputofthelowerlevelHMMsforthesegmentedgesturetoproducethedecision,whichisalsotheobservationsymbolvalueintheupperlevelHMM.AsshowninFigure4,theslidingwindowhasalengthof150datapoints(onesecond)andmovesbyastepof20datapoints.Foreachslidingwindow,themodelwiththemaximumlikelihoodistheresult.Therefore,inonegesturesegment,themajorityvotingisappliedontheresultsofallthewindowstoproduceagesturerecognitiondecision.
Fig.4 Themovingofslidingwindowsinonesegmentofagesture
22.2 Contextbasedhandgesturerecognition Inthepreviouspart,individualhandgesturesarerecognizedwithouttheknowledgeofthecontext.Inthissection,weuseanHHMM toconsiderthesequentialconstraintsamongthegestures.TheHHMMisageneralizationofthesegmentmodelwhereeachsegmenthassubsegments.Figure5illustratesthebasicideaofanHHMM.A timeseriesishierarchicallydividedintosegments,whereS1irepresentsthestateattheupperlevelHMMandS2irepresentsthestateatthelowerlevelHMM.AblockofS2iisthestatesequenceofthesubHMMsofS1i.

第3期 SHENGWeihua,etal:Awearablecomputingapproachforhandgestureanddailyactivityrecognitioninhumanrobotinteraction 43
Fig.5 ThearchitectureofanHHMM
Wedefine“context”asthesequentialconstraintsamongdifferenttypesofgestures.Figure6showsthetransitionoftheupperlevelHMM.Itisadiscrete,firstorderHMMwithfivestatesandfiveobservationsymbols.TheupperlevelHMMcanbedescribedasasequenceofcommandsandatanytimeitisinoneofasetofN(N=5)distinctstates:S1,S2,…,S5.Itundergoesachangeofstateaccordingtoasetofprobabilitiesassociatedwiththestate.Forexample,thesamecommandislesslikelytobesenttwiceconsecutively,andwhenthepreviouscommandis“goaway”,thenextonehasasmallprobabilityofbeing“gofetching”.Wedenotethetimeinstantsassociatedwiththestatechangeask=1,2,…,Nandthekthactualstateasqk.Thefollowingprobabilisticdescriptionlinksthecurrentandtheprecedingstates[6]:aij=P[qk=Sj|qk-1=Si],for1≤i,j≤N,and∑
jaij=1,
whereNisthenumberofdistinctstates.
Fig.6 ThetransitionoftheupperlevelHMMthatconsidersthecontextinformation
Theinitialstatedistributionrepresentstheprobabilitydistributionofthefirstcommand,whichisdefinedas:π=P[q1=Si,(i=1,2,…,N)].AnotherelementoftheupperlevelHMM istheobservationsymbolprobability distribution in state Sj: bj(k) =P[Ok|qt=Sj].bjshowshowlikelythiscommandwillberecognizedasthedifferentobservationsymbols,whereOkrepresentsthedecisionmadebythelowerlevelHMM.
ForagivenobservationsequencewithalengthofT,theViterbialgorithm isusedattheupperlevelHMMtofindthesinglebeststatesequenceQ={q1q2…qT},whichrepresentsthemostlikelyunderlyingcommandsequence,forthegivenobservationsequenceO={O1O2…OT}.Inthisway,someerrorsinthelowerlevelHMMcanbecorrectedbytheupperlevelHMM.
3 Humandailyactivityrecognition
Inthissection,wewilldiscussthehumandailyactivityrecognitionthroughmultisensorfusion.Twoinertialsensorsareattachedtoonefootandthewaistofthehumansubject,respectively.Therearetwostepsinthedailyactivityrecognition.Inthefirststep,thefusionofthedatafrom thetwowearablesensorsgeneratescoarsegrained classification forthreetypesofhumanactivities:zerodisplacementactivities,transitionalactivities,andstrongdisplacementactivities.Inthesecondstep,eitheraheuristicdiscriminationmoduleisusedforfinegrainedclassificationofzerodisplacementactivitiesandtransitionalactivities,oranHMMbasedrecognitionalgorithmisusedforthefinegrainedclassificationofstrongdisplacementactivities.Inthisway,thecoarsegrainedclassificationcontrolsthedirectionofthedataflowtotriggereithertheheuristicdiscriminationmoduleortheHMMbasedrecognitionmodule.Thismechanismcansavethecomputationtimeandenhancetheefficiencyoftherecognitionalgorithm. AsshowninFigure7,rawsensordata(accelerationandangularvelocity)areprocessedtoobtainthefeatures(mean,varianceandcovarianceofthe3Dangularvelocityand3Dacceleration),whicharefedintotheneuralnetworksNNfandNNw forfootandwaist,respectively.Themultisensorfusionbasedcoarsegrainedclassificationmoduledeterminesthenextstep,theheuristicdiscriminativemoduleortheHMMmodule,tobeappliedinthefinegrainedclassificationmodule.31 Coarsegrainedclassification Thefollowingactivitiesareconsideredfortheoutputofthesensorfusion:(1)AZ=zerodisplacementactivities:standing,sitting,andsleeping;(2)AT=

44 山 东 大 学 学 报 (工 学 版) 第40卷
transitionalactivities:sittingtostanding,standingtositting,levelwalkingtostairwalking,stairwalkingtolevelwalking,lyingtositting,andsittingtolying;(3)AS=strongdisplacementactivities:walkinglevel,walkingupstairs,walkingdownstairs,andrunning.Moreactivitiescanberecognizedwithadditionalsensors.Forexample,cookingandwatchingTVcanberecognizedwhentheenvironmentalaudioinformationisrecorded.TwoneuralnetworksNNfandNNwaredesignedforthedatafromthefootandthewaist,respectively.Theneuralnetworkscategorizethedataintothreetypes:(1)stationary,(2)transitional,and(3)cyclic.Theoutputsoftheneuralnetworksarefedintothefusionmodule.
Fig.7 Theoverviewofthehumandailyactivityrecognitionalgorithm.
ThefusionmoduleintegratestheindividualtypesoffootandwaistactivitiesandcategorizesthehumanactivitiesaccordingtotherulesinTable1:(1)zerodisplacementactivities:A∈AZiffAw=stationary;(2)transitional:A∈ATiff(Af=transitionalandAw=transitional)or(Af=stationaryandAw=transitional);(3)strongdisplacementactivities:A∈ASiffAf=cyclicandAw=cyclic.Allothercombinationsoffootandwaistactivitiesareconsideredasrareactivitiesandwedonotconsidertheminthispaper.
Table1 Sensorfusionrules
Fusion RulesFootsensorAf
StationaryTransitional CyclicWaist Stationary AZ AZ AZsensor Transitional AT AT —
Aw Cyclic — — AS
32 Finegrainedclassification Tofurtherdistinguishthestationaryactivities(such
assittingandstanding)andthetransitionalactivities(suchassittingtostandingandstandingtositting),aheuristicdiscriminationmodulewillbeappliedtoconsiderthepreviousstationaryactivityanddecidethetypeofthecurrenttransitionalactivity.Forexample,whenthedetectedpreviousactivityissitting,afteratransitionalactivity,thefollowingactivityisstationary.Thenweuseadiscriminativemodeltotestwhetherthedirectionofthetrunkisverticalorhorizontal:ifitisvertical,thenthecurrentactivityisstandingandtheprevioustransitionalactivityissittingtostanding;otherwise,thecurrentactivityislyingandtheprevioustransitionalactivityissittingtolying. AnHMMbasedrecognitionalgorithmisappliedtofurtherdeterminethetypesofthestrongdisplacementactivities,whichrecognizesthepatternsofthecontinuoustimeseriesofdata.Thedetailedalgorithmissimilartotheoneusedinthehandgesturerecognition.
4 Experimentalresults
Inbothexperimentsforhandgestureandactivityrecognition,theNNandHMMsaretrainedofflinebeforetheyareusedintherecognitionphase.Theofflinecomputationaltimeforonehumansubjectisabout10secondsfortheneuralnetworkand60secondsforthelowerlevelHMMbasedonacomputationserverwiththeCPUofIntelCore2,213GHzand3GBmemory.Weexperiencenodecisiondelaysduringthetestingphaseafterallthemodelsaretrained.Hereweshowtheresultsforhandgesturerecognitionandhumanactivityrecognition,respectively.41 Handgesturerecognition Inthissection,theexperimentsetupandprocessforhandgesturerecognitionareintroducedandtheresultsaredescribed.411 Experimentsetupandprocess Forhandgesturerecognition,weuseaninertialsensornIMUfromMEMSenseLLC[39],whichprovides3Dacceleration,angularvelocity,magneticdata,andtemperaturedataatasamplingrateof150HZ.TheprototypeofthewearablesensorsystemforhandgesturerecognitionisshowninFigure8.TheuIMUsensorisconnectedtoaPDA throughaRS422/RS232serialconverter,andthePDAsendsthedata

第3期 SHENGWeihua,etal:Awearablecomputingapproachforhandgestureanddailyactivityrecognitioninhumanrobotinteraction 45
toadesktopcomputerthroughWiFi.ThedatacollectionprogramforthePDAiswritteninVisualC++andtherecognitionalgorithmiswritteninMATLAB.Intheexperiments,wedefinethefollowingfivegesturesasshowninFigure9: Type1:wavinghandbackwardfor“comehere”; Type2:wavingleftandrightfor“goaway”; Type3:pointingforwardfor“gofetching”; Type4:turningclockwisefor“sitdown”,and Type5:turningcounterclockwisefor“standup”.
Fig.8 Theprototypeofthewearablesensorsystemforhandgesturerecognition
Fig.9 Thehandgesturesforthefivecommands
Wehave3experimentersandhaverecorded30setsofdatafortrainingand30setsoftestingsequence,eachofwhichisasequenceconsistingof20gestures.Intheexperiments,wefollowedthreesteps. Step1:Repeatedlyperformgesturetype1for15timesandtakea5secondbreak.Continueperformingtheresttypesfollowingthesamepatternuntiltype5isdone.Labeleachgestureandrecorddataonafile. Step2:Performasequenceof20gestureswithabreakofatleast3secondsbetweengestures.Thegesturesmimicarealworldscenarioofinteractingwitharobot. Step3:Processthetrainingdataandtestdata.First,traintheneuralnetworktodistinguishgesturesfromdailynongesturemovements.Second,useeachblockoftrainingdatatotrainthelowerlevelHMMs.
Totradeoffthecomputationalcomplexitywithefficiencyandaccuracy,thenumberofstatesinthelowerlevelHMMis20,andthenumberofdistinctobservationsymbolsis20.Third,usethetrainedHMMstorecognizeindividualcommandsinthetestdata.Theoutputofeachtestisasequenceofrecognizedcommands.Finally,theViterbialgorithmisusedtoproducethemostlikelyunderlyingcommandsequencebasedonthegivenupperlevelHMMparameters.412 EvaluationoftheNNbasedsegmentation ThefirstandthesecondlayersoftheneuralnetworkaretrainedusingMATLAB NeuralNetworkToolbox[40].Theinitialvaluesoftheweightsandbiasesarerandomlyselected.Differentinitialvaluesleadtodifferentperformances.Iftheperformancedoesnotreachthegoal,thetrainingphasehastoberestarted.Figure10showsgoodandbadtrainingresultsoftheneuralnetwork.Onlywhentheperformancereachesthegoal,asshowninthelefthalfofFigure10,theneuralnetworkachievesadequateaccuracy.However,ifthetraininggoalhasnotbeenmet,therearemoreerrorsinthesegmentationascanbeseenintherighthalfofFigure10.413 Gesturerecognitionresult
Theparameters(A,B,π)oftheupperlevelHMM areobtainedbyobservingthehumansubjectinteractingwiththerobotforasustainedperiodoftime.ThetransitionprobabilitymatrixAisobtainedbyobservingtheuser’slongtermgesturesequenceandcalculatingthetransitionprobabilitybetweentwogestures,whichcanbedifferentfrompersontoperson.Forexample,thetransitionmatrixAforoneoftheexperimenteris:A={aij}=0.0085 0.4927 0.0990 0.3991 0.00070.5849 0.3982 0.0085 0.0061 0.00230.4959 0.4937 0.0057 0.0035 0.00120.0026 0.2974 0.3984 0.0050 0.29660.0079 0.2963 0.3946 0.2988 0.
0024
.
TheobservationsymbolprobabilitydistributionmatrixBisequivalenttotheaccuracymatrixofslidingwindowsofeachindividualgesturebeforevotinginthelowerlevelHMM,whichcanbeobtainedfromtheindividualgesturerecognition.Forexample,thematrixBforoneoftheexperimenteris:

46 山 东 大 学 学 报 (工 学 版) 第40卷
Fig.10 TheperformanceoftheNNbasedgesturespotting
Fig.11 HMMtrainingphaselikelihoodvsiterationtimes
B={bij}=06434 03047 00122 00384 0001300137 09610 00074 00123 0005600024 01032 08846 00052 0004601450 00575 00428 07546 00001
00950 02414 00055 00090 06491
.
Wesettheinitialstatedistributiontobeauniformdistributiontoreflectthefactthatnopreferencewillbegiventoaspecificcommand. IntheHMMtrainingphase,newparametersarerecalculatedbythereestimationformulae[38]ateachiteration.Then,thelikelihoodofthedataiscalculated
withthenewlyestimatedparameters.Figure11showsthattheloglikelihoodvaluesofthedataofdifferentgesturesvs.theiterationnumber.Whenthenumberofiterationisgreaterthan15,thelikelihoodconvergestoastablevalue.Therefore,inourexperiments,wechose15iterations. Figure12showstherecognitionresultsofonesetoftestingdata.In(a),the3Daccelerationfromthesensorindicates20gestures.In(b),theneuralnetworkhelpstospotthegestures.In(c),whenthelowerlevelHMMsareapplied,therearesomeerrorsatthepointofa,b,c,d,e,andf.In(d),afterconsideringthecontextinformation,theerrorsatthepointofb,c,andfarecorrectedbytheBayesianfilteringintheupperlevel.Forthevideoclipsoftheexperiments,pleasegotothefollowinglink: http://ascc.okstate.edu/projectschun.html Theperformanceofrecognitionisevaluatedbycomparingtheresultwiththegroundtruth.TheclassificationaccuracyoftheHMMbasedandHHMMbasedrecognitionislistedinTables2and3,respectively.Thevaluesinboldarethepercentagesofthecorrect

第3期 SHENGWeihua,etal:Awearablecomputingapproachforhandgestureanddailyactivityrecognitioninhumanrobotinteraction 47
classificationscorrespondingtothespecificgestures.Othernumbersindicatethepercentagesofwrongclassifications.ItisobviousthattheperformanceofHHMMismuchbetterthanthatofindividualHMMsonly.
Fig.12 TheresultsoftheneuralnetworkandhiddenMarkovmodels
Table2 TheaccuracyofHMMbasedrecognitionGroundtruth
Decisiontype1 2 3 4 5
Accuracy
1 0.89290.03570.07140.00000.0000 0.89292 0.10340.80760.03450.00000.0345 0.82463 0.12900.09680.77420.00000.0000 0.77424 0.64520.03230.06450.25810.0000 0.25815 0.07600.00000.07600.00000.8462 0.8462
Table3 TheaccuracyofHHMMbasedrecognitionGroundtruth
Decisiontype1 2 3 4 5
Accuracy
1 0.92860.03570.03570.00000.0000 0.92862 0.06900.86210.00000.03450.0345 0.86213 0.06060.06060.87880.00000.0000 0.87884 0.16130.06450.03230.74190.0000 0.74195 0.07690.00000.07690.00000.8462 0.8462
42 Humandailyactivityrecognition Inthissection,theexperimentsetupandprocessfordailyactivityrecognitionareintroducedandtheresultsaredescribed.421 Experimentsetupandprocess Forhumandailyactivityrecognition,weusetwoinertialsensors.TheexperimentsetupisshowninFigure13.BothinertialsensorsareconnectedtoaPDAthroughRS422/RS232serialconverters.ThePDAsendsdatatoadesktopcomputerthroughWiFi.Inourexperiments,regulardailyactivitieswereperformed:standing,sitting,walkinglevel,walkingupstairs,walkingdownstairs,running,sleeping,etc.Werecorded20setsofdataforthetrainingpurpose
and30setsforthetestingpurpose.
Fig.13 Theexperimentsetupforhumandailyactivityrecognition
422 Evaluationoftheneuralnetworksforcoarsegrainedclassification
TheneuralnetworksNNwforthewaistandNNfforthefootaretrainedseparatelywiththedatacollectedbythecorrespondingsensors.Figure14showsgoodtrainingresultsoftheneuralnetwork.Whentheperformancereachesthegoal,theneuralnetworkcanachieveadequateaccuracyandonlyafewerrorsareobservedaroundtheedgesoftheblocks.423 Evaluationofthefinegrainedclassification Basedontheresultsofthecoarsegrainedclassification,theheuristicdiscriminationmoduleortheHMMbasedrecognitionmodulewillbeappliedforfinegrainedclassification.Ourtestsshowthattheaccuracyoftheheuristicdiscriminationmoduleisveryhigh(983%).TheHMM moduleisswitchedonwhenthereisastrongdisplacementactivity.Aslidingwindowmovesalongthesegmenteddatawithalengthof1secondandsteplengthof02second.Theoutputisasequenceofclassificationdecisions.Then,amajorityvotingfunctionfollowstoproduceasingledecisionforeachwindow. Figure15showstheaccelerationofthewaistsensor(thetopfigure),andtherecognitionresultscomparedwiththegroundtruth(thebottomfigure).Inthetopfigure,the3Daccelerationfromthesensorindicateswhencyclic,transitional,andstationaryactivitiesappear.Inthebottomfiguretherearesomemisclassificationsindicatedinthecircledareas.ThetwocirclesonthebottomfigureshowthattheerrorsarecausedbytheHMMbasedrecognitionalgorithmfor

48 山 东 大 学 学 报 (工 学 版) 第40卷
thestrongdisplacementactivities.TheHMMbasedrecognitionresultsonthetestingdataafterthemajori
tyvotingfunctionareshowninTable4.TheclassificationaccuracyisshowninTable4.
Left:theperformancegoalofthefootsensorismet,accuracy=98.40%;Right:theperformancegoalofthewaistsensorismet,accuracy=94.61%.
Fig.14 ThetrainingresultsoftheNNbasedsegmentationfordailyactivityrecognition
Fig.15 Thefinalresultsofthedailyactivityclassification
Table4 Classificationaccuracyobtainedfromthetestingdata
Activitytype
HMMdecisiontype
Walking Walkingdownstairs
Walkingupstairs Running
Accuracy
Walking 0.9030 0.0581 0.0360 0.0029 0.0930
Walkingdownstairs0.0478 0.9250 0.0270 0.0020 0.9250
Walkingupstairs 0.0759 0.0289 0.8915 0.0037 0.8915
Running 0.0901 0.0120 0.0278 0.8702 0.8701

第3期 SHENGWeihua,etal:Awearablecomputingapproachforhandgestureanddailyactivityrecognitioninhumanrobotinteraction 49
5 Conclusions
Inthispaper,weintroducedasmartassistedlivingsystemforelderlypeople,patients,andthedisabled.TheroleofrobotsisthecomputationplatformandtheserviceproviderintheSAILsystem.Thecompanionrobotcaninferthehumanintentionsandconditionsfromthesensordataandmakecorrespondingreactions.TorealizenaturalHRIinsuchaSAILsystem,weproposed(1)aneuralnetworkbasedgesturespottingandanHHMMbasedhandgesturerecognitionalgorithmforelderlypeoplewhosufferfromproblemswithspeech,and(2)amultisensorfusionbasedhumandailyactivityrecognitionalgorithm.BothofthemarebasedontheneuralnetworksandthehiddenMarkovmodels.Comparedtoothersimilarsolutions,ouralgorithmscanrealizeautonomousrecognitionofhandgesturesanddailyactivitiesinrealtime.ThealgorithmsarelightweightandresourceawaresincetheHMMmodulesaretriggeredonlywhenthereisagestureinhandgesturerecognitionorwhenthereisastrongdisplacementactivityinhumandailyactivityrecognition.Thereforethecomputationalcostisreduced,whichisimportantforembeddedcomputingsystems.Furthermore,forhandgesturerecognition,anHHMMisusedtomodelthesequentialconstraintsinthegestures,whichincreasestherecognitionaccuracy.Fordailyactivityrecognition,themultisensorfusionschemecanincreasethetypesofdailyactivitiestoberecognized.Inthefuture,wewillmodifyandimplementtherecognitionalgorithmsonarealrobotinrealtime.
References:
[1]BabyboomercaretakerCo.Ltd.Babyboomersagingneeds[EB/OL].[20081022].www.babyboomercaretaker.com/babyboomer/index.html.
[2]HAIGHKZ,YANCOH.Automationascaregiver:asurveyofissuesandtechnologies[C]//ProceedingsoftheAAAI02WorkshoponAutomationasCaregiver.Edmonton,Canada:[s.n.],2002:3953.
[3]HAASCHA,HOHENNERS,HUWEIS,etal.Bironthebielefeldrobotcompanion[C]//ProcIntWorkshoponAdvancesinServiceRobots.[S.l]:[s.n.],2004:2732.
[4]FRITSCHJ,KLEIEHAGENBROCKM,HAASCHA.,etal.AflexibleinfrastructureforthedevelopmentofarobotcompanionwithextensibleHRIcapabilities[C]//ProceedingsoftheIEEEInternationalConferenceonRoboticsandAutomation.Barcelona,Spain:IEEEPress,2005:34193425.
[5]YANCOHA,DRURYJL.Classifyinghumanrobotinteraction:anupdatedtaxonomy[C]//ProceedingsofIEEEInternationalConferenceonSystems,ManandCybernetics.Hague,Netherlands:IEEEPress,2004:28412846.
[6]ZHUC,SUNW,SHENGW.Wearablesensorsbasedhumanintentionrecognitioninsmartassistedlivingsystems[C]//ProceedingsofIEEEInternationalConferenceonInformationandAutomation.Zhangjiajie,China:IEEEPress,2008:954959.
[7]ZHUC,CHENGQ,SHENGW.HumanintentionrecognitioninsmartassistedlivingsystemsusingahierarchicalhiddenMarkovmodel[C]//ProceedingsofIEEEInternationalConferenceonAutomationScienceandEngineering.Arlington,USA:IEEEPress,2008:253258.
[8]YANGGZ,YACOUBM.Bodysensornetworks[M].Berlin,Germany:Springer,2006.
[9]ZigbeeAlliance.Zigbeetelecommunicationservices[EB/OL].[20070805].http://www.zigbee.org/en/index.asp.
[10]MORRISSEYW,ZAJICEKM.Rememberinghowtousetheinternet:aninvestigationintotheeffectivenessofvoicehelpforolderadults[C]//ProceedingsofHCIInternational,NewOrleans,USA:[s.n.]:700704.
[11]CZAJASJ.Agingandtheacquisitionofcomputerskills[M]//ROGERSW A,ARTHURDF,WALKERN.Agingandskilledperformance:Advancesintheoryandapplications.NewYork:PsychologyPress,1996:201220.
[12]YANCOHA,DRURYJL.Ataxonomyforhumanrobotinteraction[C]//ProceedingsoftheAAAI2002FallSymposium onHumanRobotInteraction.MenloPark,California:AAAIPress,2002:111119.
[13]RABINERLR.Atutorialonhiddenmarkovmodelsandselectedapplicationinspeechrecognition[J].ProcoftheIEEE,1989,77(2):267296.
[14]HAGANM T,DEMUTHHB,BEALEM H.Neuralnetworkdesign[M].Chicago:PWSPublishingCompany,1996.
[15]MITRAS,ACHARYAT.Gesturerecognition:asurvey[J].IEEETransonSystems,ManandCybernetics:PartC,2007,27(2):311324.
[16]LEEC,XUY.Online,interactivelearningofgesturesforhuman/robotinterface[C]//ProceedingsoftheIEEEInternationalConferenceonRoboticsandAutomation,

50 山 东 大 学 学 报 (工 学 版) 第40卷
volume4.Albuquerque,NM:IEEEPress,1996:29822987.
[17]VRLOGICLLC.CyberGlove[EB/OL].[20081020].http://vrlogic.com/html/immersion/cyberglove.html.
[18]HUYNHT,SCHIELEB.Analyzingfeaturesforactivityrecognition[C]//Proceedingsofthe2005JointConferenceonSmartObjectsandAmbientIntelligence:InnovativeContextawareServices:UsagesandTechnologies.Grenoble,France:theACMPress,2005:159163.
[19]OKAR.Spottingmethodforclassificationofrealworlddata[J].TheComputerJournal,1998,41(8):559565.
[20]RAMAMOORTHYA,VASWANIN,CHAUDHURYS,etal.Recognitionofdynamichandgestures[J].PatternRecognition,2003,36(9):20692081.
[21]LENMANS,BRETZNERL,THURESSONB.Computervisionbasedhandgestureinterfacesforhumancomputerinteraction,technicalreportTRITANAD0209,CID172[R].Stockholms,Sweden:NADA,DeptartmentofNumericalAnalysisandComputerScience,2002.
[22]LEEHK,KIMJH.Anhmmbasedthresholdmodelapproachforgesturerecognition[J].IEEETransactionsonPatternAnalysisandMachineIntelligence,1999(21):961973.
[23]KEHAGIASA,FORTINV.Timeseriessegmentationwithshiftingmeanshiddenmarkovmodels[J].NonlinProcessesGeophys,2006(13):339352.
[24]AMINIANK,ROBERTP,BUCHSEREE,etal.Physicalactivitymonitoringbasedonaccelerometry:validationandcomparisonwithvideoobservation[J].MedicalandBiologicalEngineeringandComputing,1999(3):304308.
[25]NAJAFIB,AMINIANK,PARASCHIVIONESCUA,etal.Ambulatorysystemforhumanmotionanalysisusingakinematicsensor:Monitoringofdailyphysicalactivityintheelderly[J].IEEETransonBiomedicalEngineering,2003,50(6):711723.
[26]MITCHELLT.Decisiontreelearning[J].MachineLearning,1997(11):5278.
[27]LOWDD,DOMINGOSP.Naivebayesmodelsforprobabilityestimation[C]//Proceedingsofthe22ndInternationalConferenceonMachineLearning.New York,USA:ACMPress,2005.
[28]LESTERJ,CHOUDHURYT,KERNN,etal.Ahybriddiscriminative/generativeapproachformodelinghuman
activities[C]//ProceedingsoftheInternationalJointConferenceonArtificialIntelligence(IJCAI,2005).Edinburgh,Scotland:ProfessionalBookCenter,2005.766772.
[29]MANTYJARVIJ,HIMBERGJ,SEPPANENT.Recognizinghumanmotionwithmultipleaccelerationsensors[C]//2001IEEEInternationalConferenceonSystems,Man,andCybernetics.Tucson,USA:IEEEPress,2001:747752.
[30]SMITHLI.Atutorialonprincipalcomponentsanalysis[EB/OL].[20031020].http://kybele.psych.cornell.edu/edelman/Psych465Spring2003/PCAtutorial.pdf.
[31]HYVARIENEA,KARHUNENJ,OJAE.Independentcomponentanalysis[M].SanFrancisco,USA:JohnWiley&Sons,2001.
[32]DEVAULRW,DUNNS.Realtimemotionclassificationforwearablecomputingapplications[R].Technicalreport.MIT,USA:MITMediaLaboratory,2001.
[33]TITTERINGTOND,SMITHA,MAKOVU.Statisticalanalysisoffinitemixturedistributions[M].SanFrancisco,USA:JohnWiley&Sons,1985.
[34]FREUNDY.Boostingaweaklearningalgorithmbymajority[C]//ProceedingsoftheThirdAnnualWorkshoponComputationalLearning Theory.Rochester, NewYork:MorganKaufmannPublishers,1990:202216.
[35]BAUMLE,EGONJA.AninequalitywithapplicationstostatisticalestimationforprobabilisticfunctionsofaMarkovprocessandtoamodelforecology[J].BullAmerMeteorolSoc,1967(73):360363.
[36]BUAMLE,SELLGR.Growthfunctionsfortransformationsonmanifolds[J].PacJMath,1968,27(2):211227.
[37]VITERBIAJ.Errorboundsforconvolutionalcodesandanasymptoticallyoptimaldecodingalgorithm[J].IEEETransInformatTheory,1967(13):260269.
[38]DEMPSTERAP,LAIRDNM,RUBINDB.Maximumlikelihoodfrom incompletedataviatheem algorithm[J].JRoyStatSoc,1977,39(1):138.
[39]MEMSenseLLC.Produces[EB/OL].[20090524].http://www.memsense.com/,2009.
[40]MATLAB LLC.Neuralnetworktoolbox[EB/OL].[20090208].http://www.mathworks.com/products/neuralnet,2009.
(编辑:陈斌)