Embed Size (px)
Citation preview
Corso di Laurea Magistrale in
Ingegneria delle Infrastrutture Viarie e Trasporti
A.A. 2017/2018
Relazione di Fine Tirocinio
Studio del Simulatore di Guida in Realtà Virtuale
Tirocinante Tutor
Valentino Mustone Prof. Alessandro Calvi
Sommario
INTRODUZIONE .......................................................................................................................................................... 4
IL SIMULATORE DI GUIDA IN REALTÀ VIRTUALE ......................................................................................................... 5
SOFTWARE DI IMPLEMENTAZIONE DEGLI SCENARI: STISIM DRIVE ............................................................................. 8
I LINGUAGGIO DI STISIM DRIVE 3 .......................................................................................................................................... 9 COMANDI FONDAMENTALI .................................................................................................................................................. 11 OGGETTI STATICI ............................................................................................................................................................... 13 OGGETTI DINAMICI ............................................................................................................................................................ 13
SCENARIO NATURALISTICO ........................................................................................................................................14
STRUTTURA ...................................................................................................................................................................... 15 EVENTI CRITICI .................................................................................................................................................................. 16
NUOVO SCENARIO .....................................................................................................................................................17
STRUTTURA AD ALBERO ...................................................................................................................................................... 19 STRUTTURA A BLOCCHI SOVRAPPOSTI .................................................................................................................................... 21 EVENTI CRITICI .................................................................................................................................................................. 23
Indice delle figure
Figura 1 – Simulatore di guida: Toyota Auris ..................................................................................................... 5
Figura 2 – Simulatore di guida: interni .............................................................................................................. 5
Figura 3 – Simulatore di guida: proiezione di uno scenario .............................................................................. 6
Figura 4 – Work station principale .................................................................................................................... 6
Figura 5 – Work station secondaria ................................................................................................................... 7
Figura 6 – Struttura software STISIM Drive3 ..................................................................................................... 8
Figura 7 – Esempio di un file di configurazione ................................................................................................. 9
Figura 8 – Esempio di un file .evt ..................................................................................................................... 10
Figura 9 – Esempio di un file .pde.................................................................................................................... 10
Figura 10 – Esempio comando Begin Block Save ............................................................................................ 11
Figura 11 – Elementi della sezione stradale .................................................................................................... 11
Figura 12 – Esempio comando Curve .............................................................................................................. 12
Figura 13 – Esempio comando Hill .................................................................................................................. 12
Figura 14 – Esempio comando Intersection .................................................................................................... 12
Figura 15 – Esempio di oggetto statico da libreria .......................................................................................... 13
Figura 16 – Esempio di oggetto statico .mesh ................................................................................................. 13
Figura 17 – Esempio di oggetto dinamico ....................................................................................................... 13
Figura 18 – Anteprima scenario naturalistico / Ambito Extraurbano ............................................................. 14
Figura 19 – Anteprima scenario naturalistico / Ambito Urbano ..................................................................... 14
Figura 20 – Anteprima scenario naturalistico / Ambito Industriale ................................................................ 15
Figura 21 – Attraversamento animali scenario naturalistico .......................................................................... 16
Figura 22 – Esempio di codice STISIM – Attraversamento animali ................................................................. 16
Figura 23 – Edifici a schiera realizzati tramite Autocad 3DS Max ................................................................... 17
Figura 24 – Anteprima nuovo scenario / Ambito Urbano ............................................................................... 18
Figura 25 – Anteprima nuovo scenario / Ambito Extraurbano ....................................................................... 18
Figura 26 – Esempio di codice STISIM – File .Evt ............................................................................................. 20
Figura 27 – Esempio codice STISIM – File .pde di primo livello ....................................................................... 20
Figura 28 – Esempio codice STISIM – Stralcio di file .pde di secondo livello .................................................. 20
Figura 29 – Struttura a blocchi sovrapposti – Nnuovo scenario ..................................................................... 21
Figura 30 – Sezione di passaggio tra ambito industriale ed urbano ............................................................... 22
Figura 31 – Esempio codice STISIM – Caratteristiche plano-altimetriche .pde ............................................... 22
Figura 32 – Esempio codice STISIM – Eventi critici .pde ................................................................................. 23
Figura 33 – Esempio di codice STISIM Drive – Car Following .......................................................................... 23
Figura 34 – Esempio di codice STISIM Drive – Attraversamento pedonale .................................................... 24
Introduzione
L’attività di tirocinio di cui si discute nella presente relazione si è tenuta dal 15/12/2018 al
12/02/2019 presso il Centro Interuniversitario di Ricerca sulla Sicurezza Stradale, sito nel
Laboratorio di Infrastrutture Viarie della facoltà di Ingegneria Civile Roma 3.
L’obiettivo a monte del tirocinio formativo è stato quello di assumere le conoscenze necessarie per
il corretto funzionamento del simulatore di guida e la realizzazione di scenari di guida virtuali per
poter condurre efficacemente un lavoro di Tesi di Laurea Magistrale in materia di sicurezza stradale,
in particolare mirata alla comprensione degli effetti della guida distratta.
Il simulatore di guida in realtà virtuale è infatti uno strumento che oggi risulta imprescindibile per
una corretta analisi delle problematiche relative alla distrazione alla guida.
Gran parte degli studi scientifici in materia sono stati condotti negli anni tramite l’ausilio di questa
strumentazione, che permette di:
evitare tutte le problematiche ed i rischi connessi ad una sperimentazione di guida su strada;
inserire il guidatore in scenari di cui si detiene il completo controllo su geometrie, traffico,
condizioni al contorno (meteo, aderenza, elementi di arredo);
riprodurre fedelmente l’esperienza di guida su strada sempre allo stesso modo per tutti i
partecipanti ottenendo così risultati statisticamente attendibili;
immagazzinare un numero notevole di parametri di guida relativi ad ogni singola prova.
Grazie allo sviluppo di tecnologie di questo tipo è possibile avere una maggiore versatilità delle
analisi scientifiche che oggi possono essere condotte in maniera più efficiente e senza alcun rischio
per i partecipanti.
Le nozioni apprese durante le ore di tirocinio hanno dunque permesso di realizzare degli scenari che
innanzitutto rispondono perfettamente alle esigenze della sperimentazione, incentrata sulla
distrazione alla guida, ed in secondo luogo potranno essere utilizzati come punto di partenza per
successive sperimentazioni.
Infatti, dopo aver assunto le conoscenze fondamentali per il funzionamento del simulatore, ci si è
concentrati sul modificare sia dal punto di vista strutturale che rappresentativo uno scenario
realizzato per delle precedenti simulazioni di guida. Tali modifiche hanno permesso la realizzazione
di un nuovo scenario che, a differenza dei precedenti realizzati, permette agli sperimentatori di
presentare ai guidatori scene ogni volta “differenti” con maggior facilità grazie alla struttura a
blocchi sovrapposti utilizzata.
Tali caratteristiche hanno agevolato la realizzazione di scenari di guida credibili e difficilmente
memorizzabili dai guidatori e saranno di grande aiuto alla realizzazione di nuovi ambiti di prova per
le successive attività di ricerca condotte all’interno del laboratorio.
Il simulatore di guida in realtà virtuale
Il simulatore di guida presente nel Laboratorio di Infrastrutture Viarie del Dipartimento di Ingegneria
Civile all’Università di Roma 3 è stato realizzato da una società informatica statunitense, la System
Technology Incorporated ed utilizza come software di implementazione degli scenari in realtà
virtuale STISIM Drive 3.
Il simulatore di guida si costituisce di una struttura hardware e di una software.
Per quanto riguarda gli elementi della prima famiglia, questo presenta:
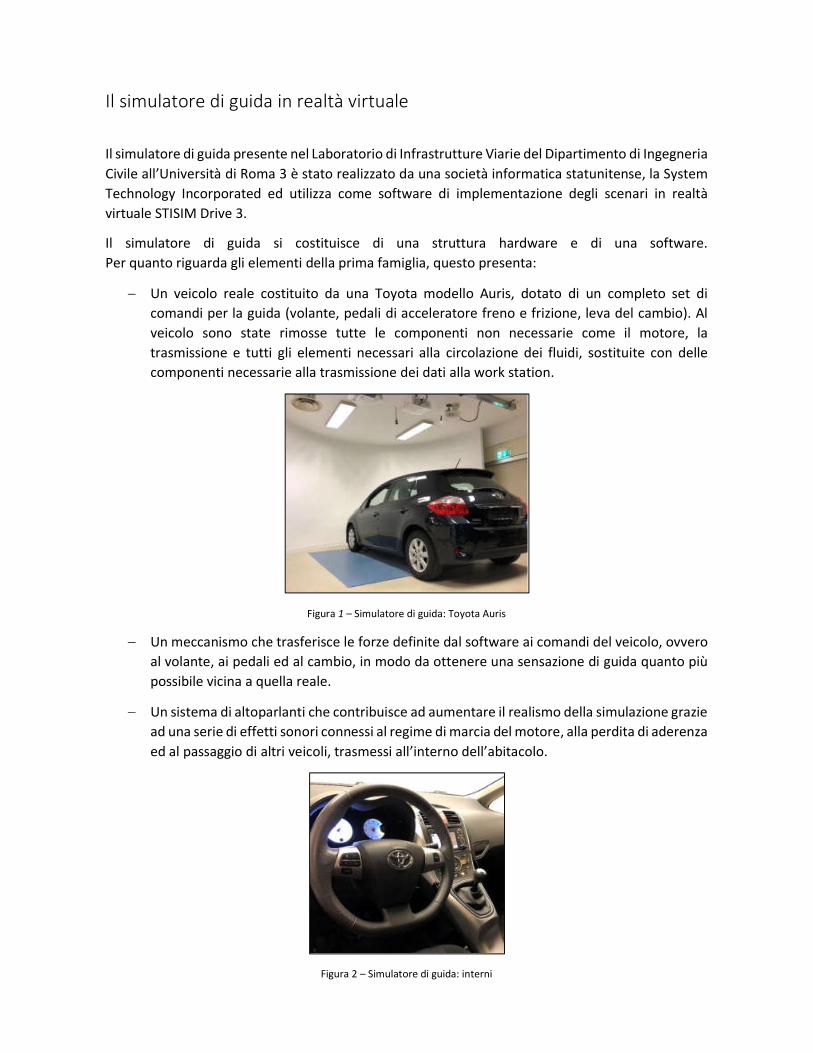
Un veicolo reale costituito da una Toyota modello Auris, dotato di un completo set di
comandi per la guida (volante, pedali di acceleratore freno e frizione, leva del cambio). Al
veicolo sono state rimosse tutte le componenti non necessarie come il motore, la
trasmissione e tutti gli elementi necessari alla circolazione dei fluidi, sostituite con delle
componenti necessarie alla trasmissione dei dati alla work station.
Figura 1 – Simulatore di guida: Toyota Auris
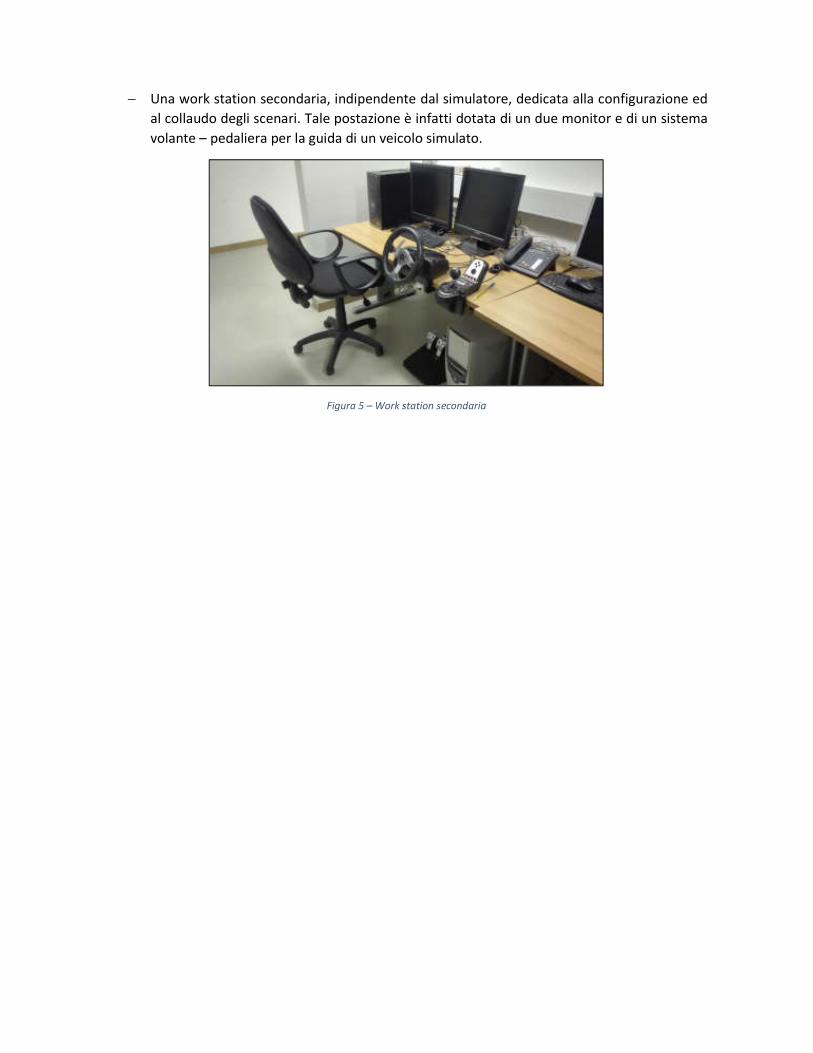
Un meccanismo che trasferisce le forze definite dal software ai comandi del veicolo, ovvero
al volante, ai pedali ed al cambio, in modo da ottenere una sensazione di guida quanto più
possibile vicina a quella reale.
Un sistema di altoparlanti che contribuisce ad aumentare il realismo della simulazione grazie
ad una serie di effetti sonori connessi al regime di marcia del motore, alla perdita di aderenza
ed al passaggio di altri veicoli, trasmessi all’interno dell’abitacolo.
Figura 2 – Simulatore di guida: interni

Uno schermo curvo posto anteriormente al veicolo, che permette un angolo di visuale di
180°, dove, grazie all’ausilio di tre proiettori direttamente collegati alla work station,
vengono visualizzati gli scenari di guida attraverso. Come è possibile vedere nella seguente
immagine, sullo schermo vengono ulteriormente proiettati, in appositi riquadri
opportunamente posizionati, gli specchietti retrovisori, i quali, per ovvi motivi, vengono
sostituiti tramite software.
Figura 3 – Simulatore di guida: proiezione di uno scenario
Una work station principale dedicata alla gestione del simulatore, direttamente collegata al
veicolo ed ai comandi e composta da un PC in cui è stato implementato il simulatore STI
Technology. Tale stazione di lavoro è connessa alla rete e dedicata alla generazione delle
immagini e delle equazioni numeriche che caratterizzano l’articolato processo di creazione
e gestione degli scenari virtuali.
Figura 4 – Work station principale
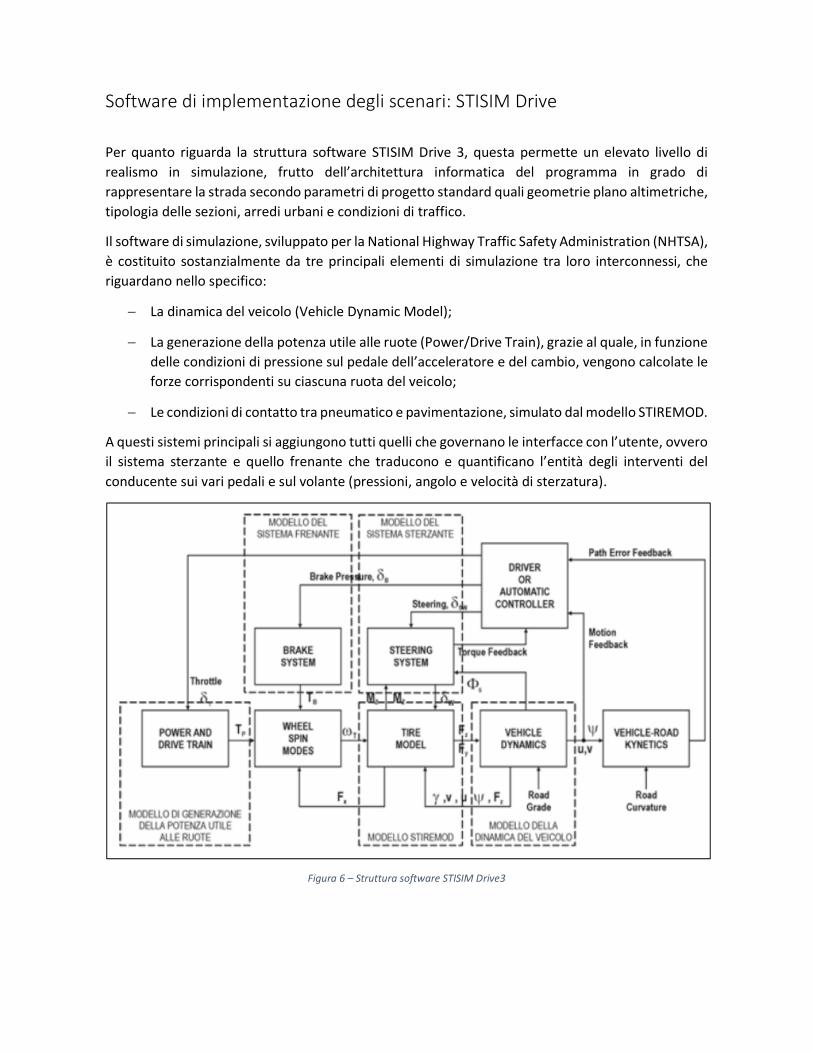
Una work station secondaria, indipendente dal simulatore, dedicata alla configurazione ed
al collaudo degli scenari. Tale postazione è infatti dotata di un due monitor e di un sistema
volante – pedaliera per la guida di un veicolo simulato.
Figura 5 – Work station secondaria
Software di implementazione degli scenari: STISIM Drive
Per quanto riguarda la struttura software STISIM Drive 3, questa permette un elevato livello di
realismo in simulazione, frutto dell’architettura informatica del programma in grado di
rappresentare la strada secondo parametri di progetto standard quali geometrie plano altimetriche,
tipologia delle sezioni, arredi urbani e condizioni di traffico.
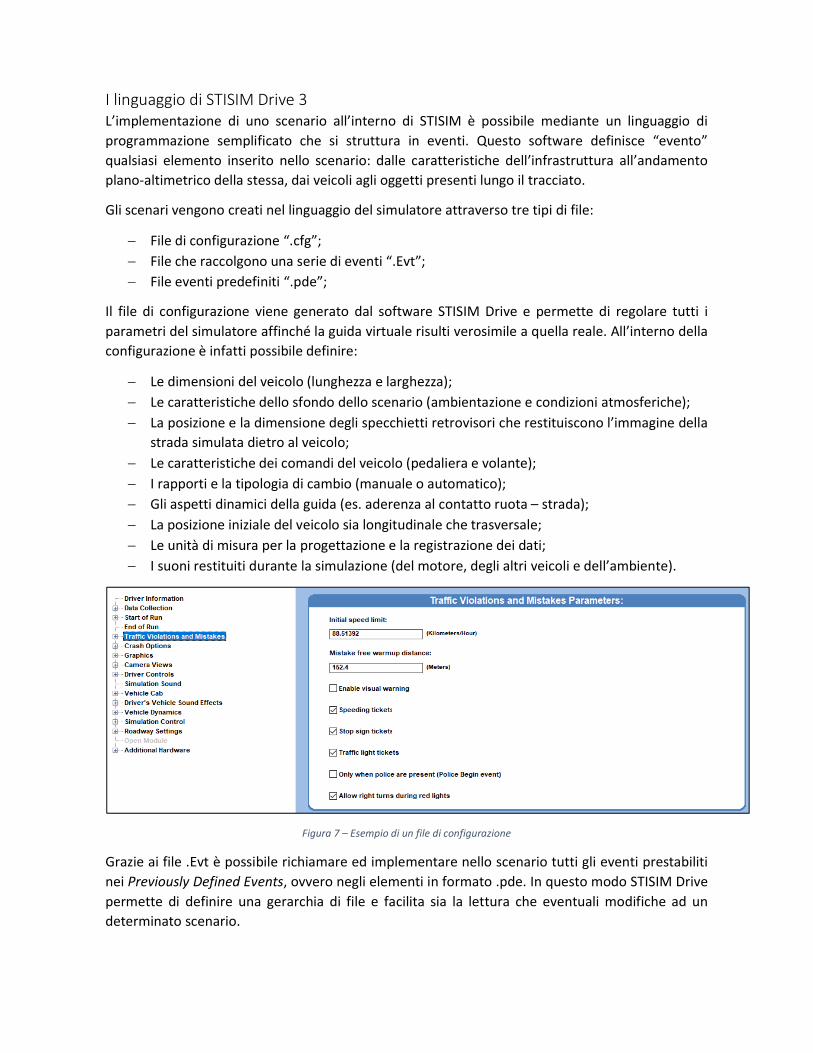
Il software di simulazione, sviluppato per la National Highway Traffic Safety Administration (NHTSA),
è costituito sostanzialmente da tre principali elementi di simulazione tra loro interconnessi, che
riguardano nello specifico:
La dinamica del veicolo (Vehicle Dynamic Model);
La generazione della potenza utile alle ruote (Power/Drive Train), grazie al quale, in funzione
delle condizioni di pressione sul pedale dell’acceleratore e del cambio, vengono calcolate le
forze corrispondenti su ciascuna ruota del veicolo;
Le condizioni di contatto tra pneumatico e pavimentazione, simulato dal modello STIREMOD.
A questi sistemi principali si aggiungono tutti quelli che governano le interfacce con l’utente, ovvero
il sistema sterzante e quello frenante che traducono e quantificano l’entità degli interventi del
conducente sui vari pedali e sul volante (pressioni, angolo e velocità di sterzatura).
Figura 6 – Struttura software STISIM Drive3
I linguaggio di STISIM Drive 3 L’implementazione di uno scenario all’interno di STISIM è possibile mediante un linguaggio di
programmazione semplificato che si struttura in eventi. Questo software definisce “evento”
qualsiasi elemento inserito nello scenario: dalle caratteristiche dell’infrastruttura all’andamento
plano-altimetrico della stessa, dai veicoli agli oggetti presenti lungo il tracciato.
Gli scenari vengono creati nel linguaggio del simulatore attraverso tre tipi di file:
File di configurazione “.cfg”;
File che raccolgono una serie di eventi “.Evt”;
File eventi predefiniti “.pde”;
Il file di configurazione viene generato dal software STISIM Drive e permette di regolare tutti i
parametri del simulatore affinché la guida virtuale risulti verosimile a quella reale. All’interno della
configurazione è infatti possibile definire:
Le dimensioni del veicolo (lunghezza e larghezza);
Le caratteristiche dello sfondo dello scenario (ambientazione e condizioni atmosferiche);
La posizione e la dimensione degli specchietti retrovisori che restituiscono l’immagine della
strada simulata dietro al veicolo;
Le caratteristiche dei comandi del veicolo (pedaliera e volante);
I rapporti e la tipologia di cambio (manuale o automatico);
Gli aspetti dinamici della guida (es. aderenza al contatto ruota – strada);
La posizione iniziale del veicolo sia longitudinale che trasversale;
Le unità di misura per la progettazione e la registrazione dei dati;
I suoni restituiti durante la simulazione (del motore, degli altri veicoli e dell’ambiente).
Figura 7 – Esempio di un file di configurazione
Grazie ai file .Evt è possibile richiamare ed implementare nello scenario tutti gli eventi prestabiliti
nei Previously Defined Events, ovvero negli elementi in formato .pde. In questo modo STISIM Drive
permette di definire una gerarchia di file e facilita sia la lettura che eventuali modifiche ad un
determinato scenario.

I file .Evt vengono scritti in formato testo (.txt) e vengono successivamente convertiti per poter
essere letti dal programma. Al loro interno sono contenute le stringhe di codice, ognuna delle quali
può fare riferimento sia a comandi fondamentali (relativi alle caratteristiche della strada o al
salvataggio dati) che a file .pde, richiamati ad una predefinita progressiva di caricamento dello
scenario.
Figura 8 – Esempio di un file .evt
I file .pde sono formalmente analoghi ai precedenti, ovvero sono anche questi file di testo ma hanno
un’estensione differente. Come è possibile constatare dalla seguente immagine, all’interno dei .pde
sono contenuti oggetti ed elementi caratterizzanti lo scenario richiamati a determinate progressive,
questa volta relative a quelle riportate all’interno dei file di gerarchia superiore, gli .evt.
Figura 9 – Esempio di un file .pde
Comandi fondamentali In questo paragrafo si vogliono definire in maniera più specifica i comandi principali per la
realizzazione degli scenari e per il salvataggio dei dati di Output:
Comando Begin Block Save
Attraverso questo comando si esplicitano il numero di parametri da salvare al
termine della registrazione relativi a diversi aspetti della cinematica e dinamica del
veicolo.
Figura 10 – Esempio comando Begin Block Save
Di importanza fondamentale sono il primo parametro, che permette e di scegliere il modo
con cui il software salva i dati in funzione del tempo o dello spazio, ed il secondo che invece
indica il passo con cui salvare i dati, in questo caso ogni 0,1 secondi, restituendo quindi 10
valori dei parametri al secondo. I parametri scelti per il salvataggio sono riportati secondo
un codice numerico, per un massimo di 40 totali.
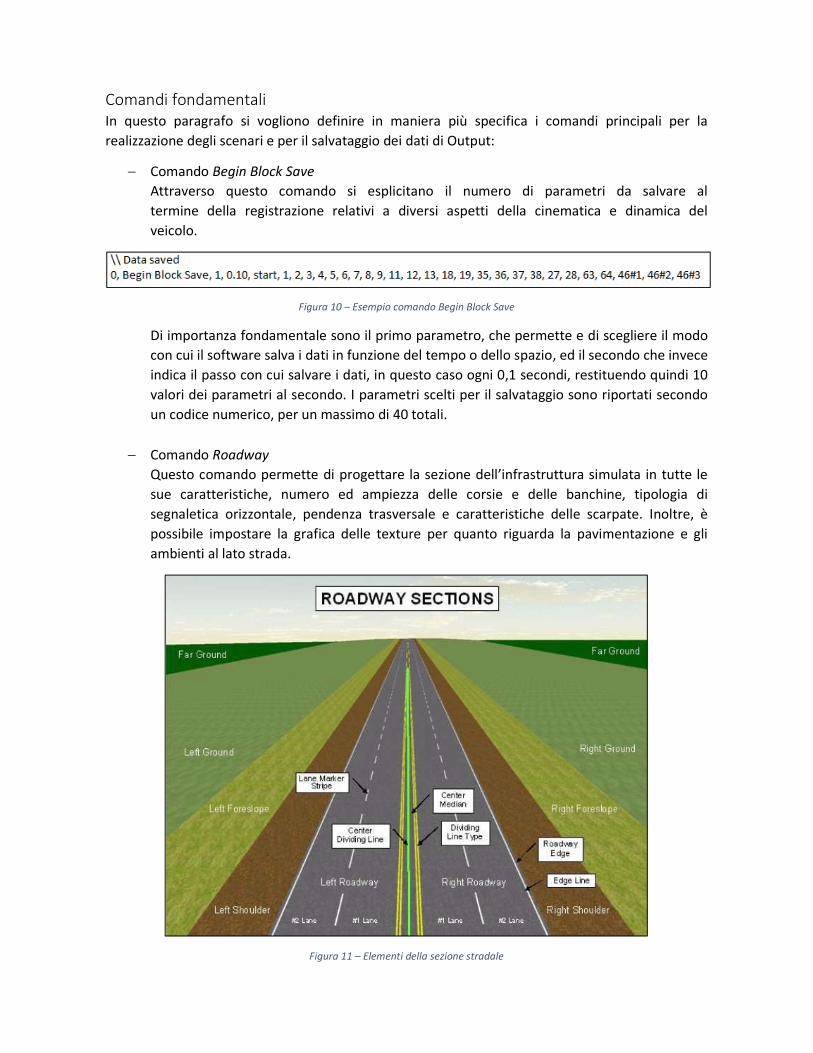
Comando Roadway
Questo comando permette di progettare la sezione dell’infrastruttura simulata in tutte le
sue caratteristiche, numero ed ampiezza delle corsie e delle banchine, tipologia di
segnaletica orizzontale, pendenza trasversale e caratteristiche delle scarpate. Inoltre, è
possibile impostare la grafica delle texture per quanto riguarda la pavimentazione e gli
ambienti al lato strada.
Figura 11 – Elementi della sezione stradale
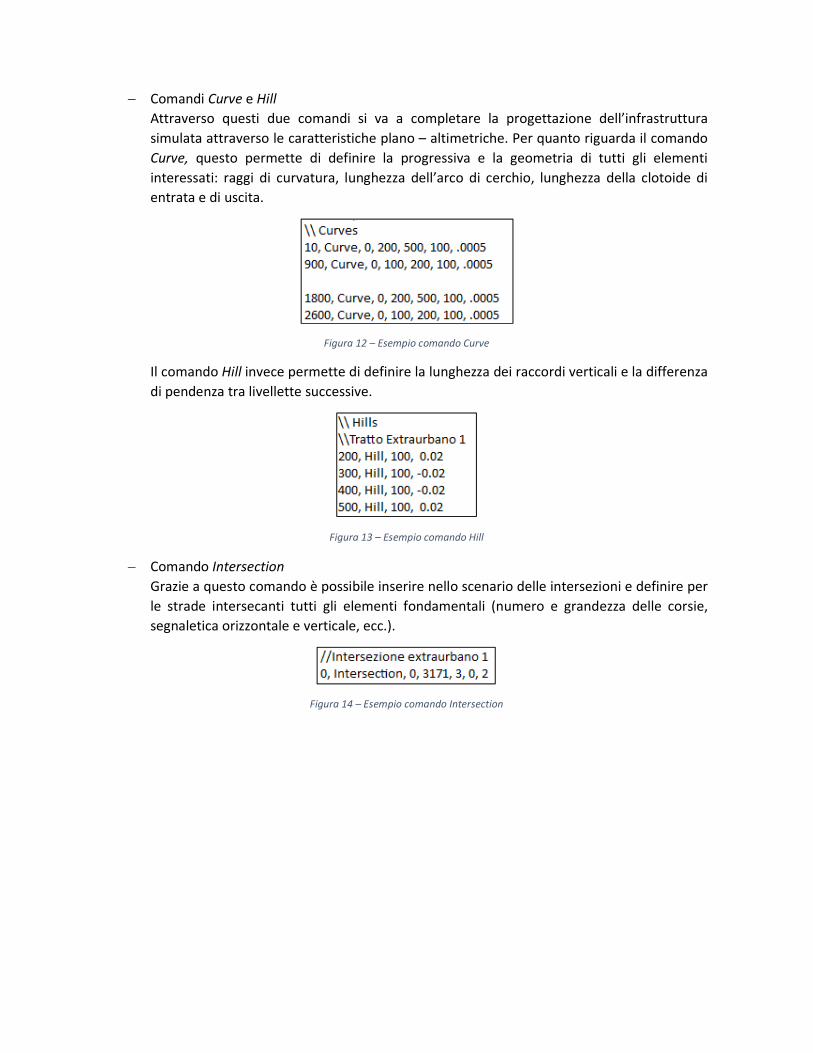
Comandi Curve e Hill
Attraverso questi due comandi si va a completare la progettazione dell’infrastruttura
simulata attraverso le caratteristiche plano – altimetriche. Per quanto riguarda il comando
Curve, questo permette di definire la progressiva e la geometria di tutti gli elementi
interessati: raggi di curvatura, lunghezza dell’arco di cerchio, lunghezza della clotoide di
entrata e di uscita.
Figura 12 – Esempio comando Curve
Il comando Hill invece permette di definire la lunghezza dei raccordi verticali e la differenza
di pendenza tra livellette successive.
Figura 13 – Esempio comando Hill
Comando Intersection
Grazie a questo comando è possibile inserire nello scenario delle intersezioni e definire per
le strade intersecanti tutti gli elementi fondamentali (numero e grandezza delle corsie,
segnaletica orizzontale e verticale, ecc.).
Figura 14 – Esempio comando Intersection
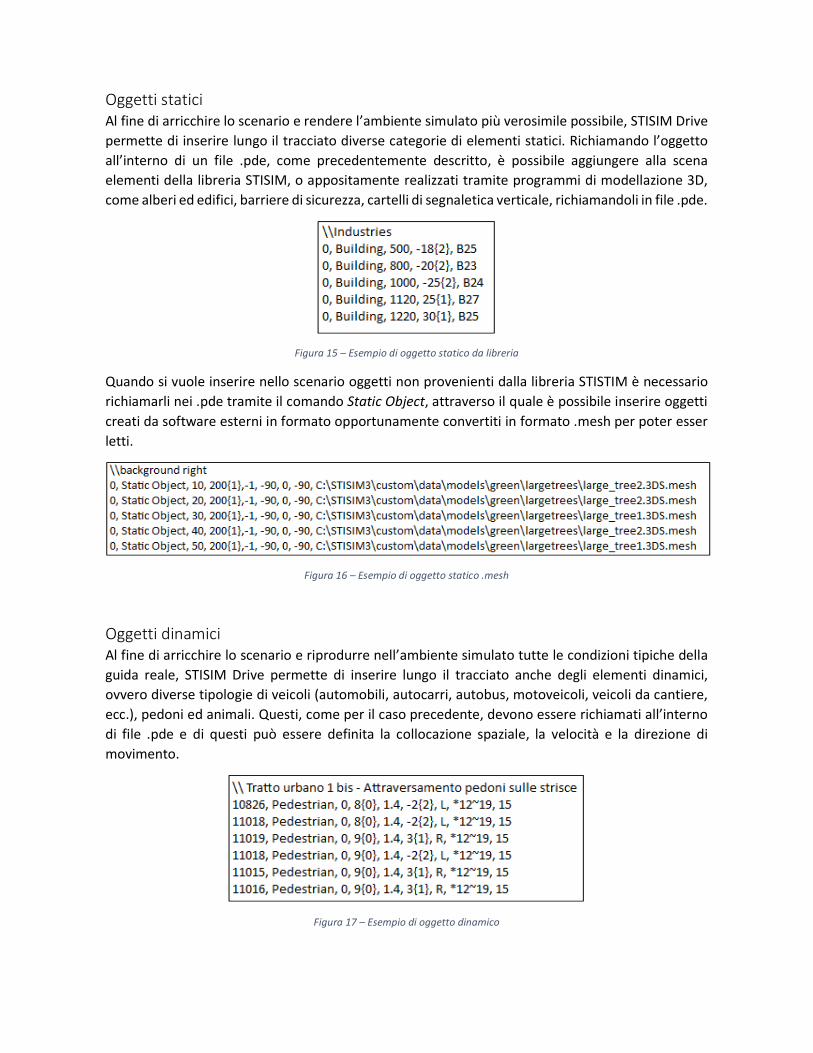
Oggetti statici Al fine di arricchire lo scenario e rendere l’ambiente simulato più verosimile possibile, STISIM Drive
permette di inserire lungo il tracciato diverse categorie di elementi statici. Richiamando l’oggetto
all’interno di un file .pde, come precedentemente descritto, è possibile aggiungere alla scena
elementi della libreria STISIM, o appositamente realizzati tramite programmi di modellazione 3D,
come alberi ed edifici, barriere di sicurezza, cartelli di segnaletica verticale, richiamandoli in file .pde.
Figura 15 – Esempio di oggetto statico da libreria
Quando si vuole inserire nello scenario oggetti non provenienti dalla libreria STISTIM è necessario
richiamarli nei .pde tramite il comando Static Object, attraverso il quale è possibile inserire oggetti
creati da software esterni in formato opportunamente convertiti in formato .mesh per poter esser
letti.
Figura 16 – Esempio di oggetto statico .mesh
Oggetti dinamici Al fine di arricchire lo scenario e riprodurre nell’ambiente simulato tutte le condizioni tipiche della
guida reale, STISIM Drive permette di inserire lungo il tracciato anche degli elementi dinamici,
ovvero diverse tipologie di veicoli (automobili, autocarri, autobus, motoveicoli, veicoli da cantiere,
ecc.), pedoni ed animali. Questi, come per il caso precedente, devono essere richiamati all’interno
di file .pde e di questi può essere definita la collocazione spaziale, la velocità e la direzione di
movimento.
Figura 17 – Esempio di oggetto dinamico
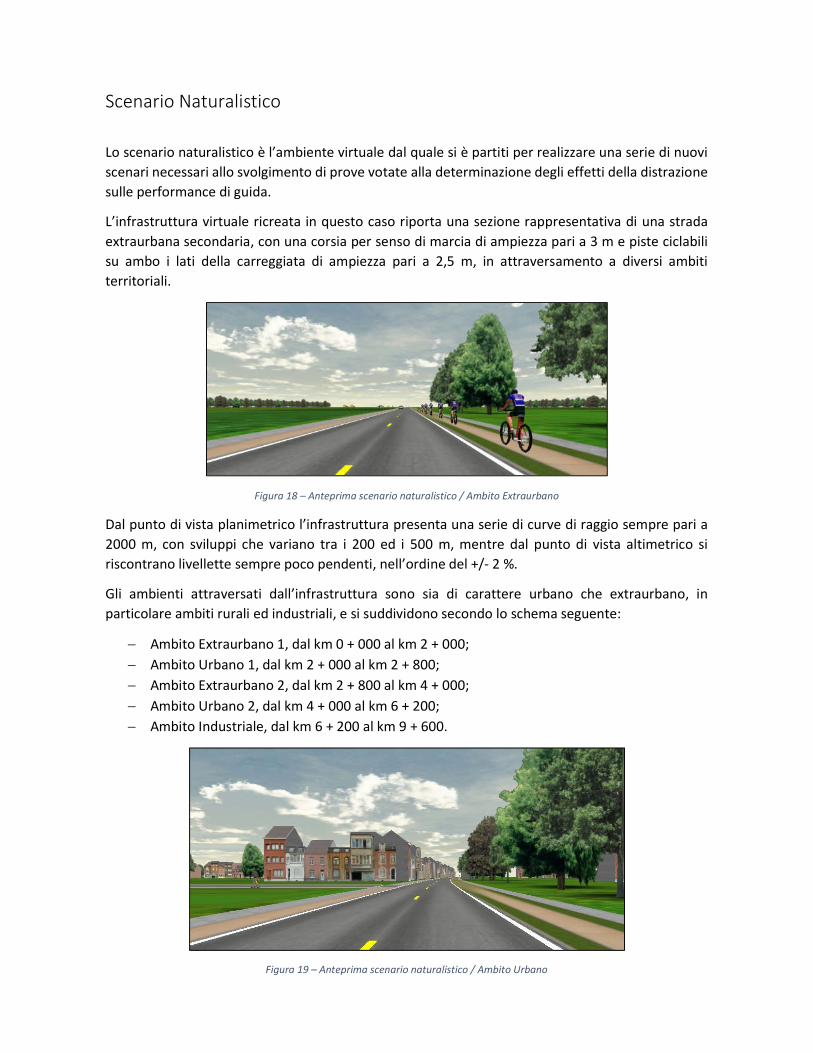
Scenario Naturalistico
Lo scenario naturalistico è l’ambiente virtuale dal quale si è partiti per realizzare una serie di nuovi
scenari necessari allo svolgimento di prove votate alla determinazione degli effetti della distrazione
sulle performance di guida.
L’infrastruttura virtuale ricreata in questo caso riporta una sezione rappresentativa di una strada
extraurbana secondaria, con una corsia per senso di marcia di ampiezza pari a 3 m e piste ciclabili
su ambo i lati della carreggiata di ampiezza pari a 2,5 m, in attraversamento a diversi ambiti
territoriali.
Figura 18 – Anteprima scenario naturalistico / Ambito Extraurbano
Dal punto di vista planimetrico l’infrastruttura presenta una serie di curve di raggio sempre pari a
2000 m, con sviluppi che variano tra i 200 ed i 500 m, mentre dal punto di vista altimetrico si
riscontrano livellette sempre poco pendenti, nell’ordine del +/- 2 %.
Gli ambienti attraversati dall’infrastruttura sono sia di carattere urbano che extraurbano, in
particolare ambiti rurali ed industriali, e si suddividono secondo lo schema seguente:
Ambito Extraurbano 1, dal km 0 + 000 al km 2 + 000;
Ambito Urbano 1, dal km 2 + 000 al km 2 + 800;
Ambito Extraurbano 2, dal km 2 + 800 al km 4 + 000;
Ambito Urbano 2, dal km 4 + 000 al km 6 + 200;
Ambito Industriale, dal km 6 + 200 al km 9 + 600.
Figura 19 – Anteprima scenario naturalistico / Ambito Urbano

Chiude lo scenario naturalistico una tratta in attraversamento ad una zona industriale
caratterizzata da edifici tipici di tali aree, reperiti dalla libreria STISIM Drive.
Figura 20 – Anteprima scenario naturalistico / Ambito Industriale
Lo scenario prevede una serie di veicoli nel verso opposto necessari ad animare gli ambiti
realizzati, tuttavia questi sono sempre in quantità moderate fatta eccezione per l’ambito
industriale. Per quanto riguarda i veicoli nello stesso verso del driver, questi vengono collocati solo
quando si vuole condurre il guidatore in una situazione di car following.
Struttura Lo scenario naturalistico presenta nella sua struttura un unico file .Evt, all’interno del quale sono
contenuti numerosi file .pde, ognuno relativo ad un aspetto caratteristico dell’ambiente ricreato. In
particolare, la struttura di tale scenario si presenta secondo questo schema:
Scenario Naturalistico.Evt o Background_trees1.pde
o Background_trees2.pde
o Buldings.pde
o Bus1.pde
o Bus2.pde
o Curves.pde
o Custom_buildings1.pde
o Custom_buildings2.pde
o Far_trees.pde
o Hills.pde
o Intersection.pde
o Objects.pde
o Pedestrian.pde
o School.pde
o Trees1.pde
o Trees2.pde
o Vehicles.pde
Come è possibile constatare, l’ambiente simulato è generato da una serie di file .pde all’interno dei
quali sono richiamati, a specifiche chilometriche, gli oggetti rappresentativi dell’intero tracciato
(alberi, edfici, veicoli, ecc.). Lungo il tracciato si vengono a creare differenti tipologie di ambiti grazie
alla collocazione di differenti elementi nei .pde, tuttavia tale suddivisione non si riflette
sull’organizzazione dei file che risulta invece concepita come per un unico ambiente.
Pertanto, non avendo la possibilità di spostare e modificare intere sezioni di tracciato, la mole di
lavoro necessaria a modificare tale scenario per crearne alcuni alternativi sarebbe paragonabile a
quella necessaria alla realizzazione di ambienti virtuali totalmente nuovi.
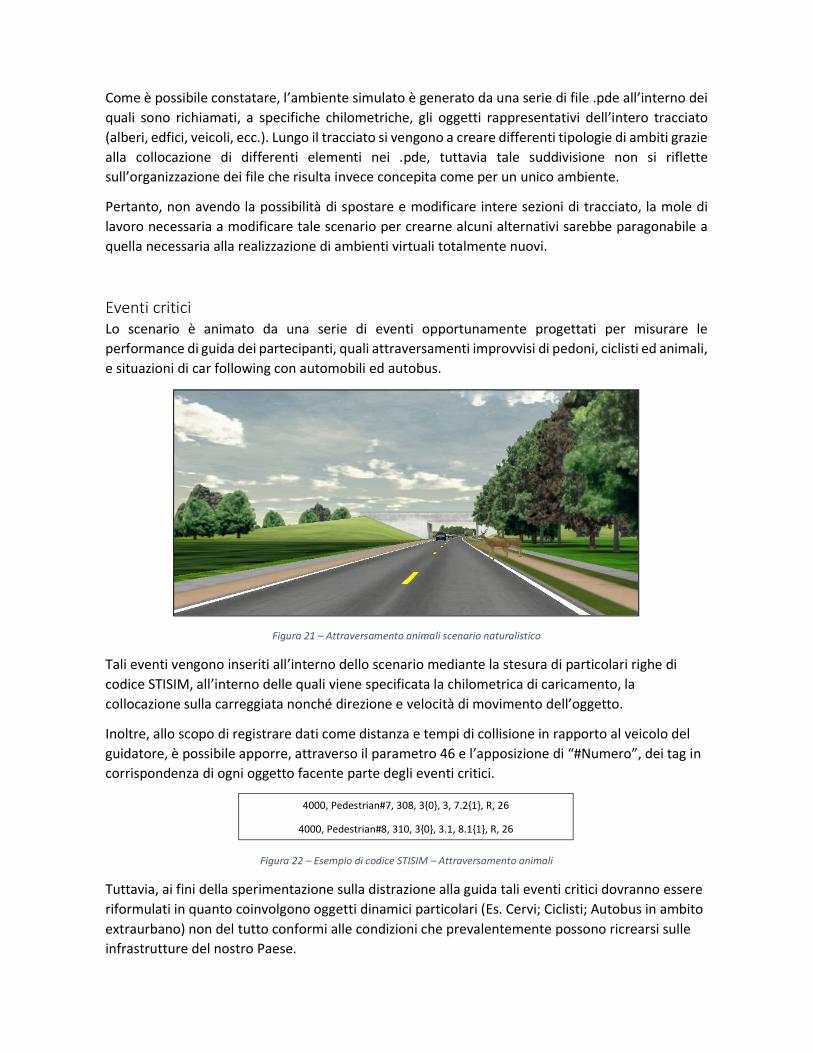
Eventi critici Lo scenario è animato da una serie di eventi opportunamente progettati per misurare le
performance di guida dei partecipanti, quali attraversamenti improvvisi di pedoni, ciclisti ed animali,
e situazioni di car following con automobili ed autobus.
Figura 21 – Attraversamento animali scenario naturalistico
Tali eventi vengono inseriti all’interno dello scenario mediante la stesura di particolari righe di
codice STISIM, all’interno delle quali viene specificata la chilometrica di caricamento, la
collocazione sulla carreggiata nonché direzione e velocità di movimento dell’oggetto.
Inoltre, allo scopo di registrare dati come distanza e tempi di collisione in rapporto al veicolo del
guidatore, è possibile apporre, attraverso il parametro 46 e l’apposizione di “#Numero”, dei tag in
corrispondenza di ogni oggetto facente parte degli eventi critici.
Figura 22 – Esempio di codice STISIM – Attraversamento animali
Tuttavia, ai fini della sperimentazione sulla distrazione alla guida tali eventi critici dovranno essere
riformulati in quanto coinvolgono oggetti dinamici particolari (Es. Cervi; Ciclisti; Autobus in ambito
extraurbano) non del tutto conformi alle condizioni che prevalentemente possono ricrearsi sulle
infrastrutture del nostro Paese.
4000, Pedestrian#7, 308, 3{0}, 3, 7.2{1}, R, 26
4000, Pedestrian#8, 310, 3{0}, 3.1, 8.1{1}, R, 26
Nuovo scenario
Ai fini della sperimentazione è fondamentale assicurare che lo scenario in cui si immerge l’utente
sia verosimile e familiare. Tuttavia, le infrastrutture e gli ambienti ricreati nello scenario naturalistico
riportano caratteristiche tipiche dei Paesi Bassi, poco coerenti con quanto atteso dal campione
partecipante alle prove.
Pertanto, il nuovo scenario viene progettato sulla base di quello naturalistico ma con l’intento di
raffigurare scene tipiche del panorama italiano, sia per caratteristiche dell’infrastruttura che per gli
ambienti al contorno, cercando di ricreare un insieme di ambiti urbani ed extraurbani familiari ai
partecipanti.
Per ricreare tali condizioni, gli ambienti virtuali che caratterizzano gli scenari sono stati riprogettati,
suddividendoli per singole tratte ognuna relativa ad uno specifico ambito:
Tratto Urbano 1, di lunghezza pari ad 800 m;
Tratto Urbano 2, di lunghezza pari a 2000 m;
Tratto Extraurbano 1, di lunghezza pari a 2200 m;
Tratto Extraurbano 2, di lunghezza pari a 2200 m;
Tratto Industriale, di lunghezza pari a 3200 m.
Tuttavia, la sezione lungo il percorso resta omogenea per tutti gli ambienti, come per il caso dello
scenario naturalistico ricalca le caratteristiche di un’infrastruttura extraurbana secondaria di tipo C2
(due corsie, una per senso di marcia, di ampiezza pari a 3,5 m e banchina laterale di 1,75 m) ma
priva di piste ciclabili e di lunghezza complessiva di 10,6 km. Anche dal punto di vista planimetrico
l’infrastruttura ricalca lo scenario di riferimento.
In ogni specifico ambito sono stati inseriti elementi caratteristici provenienti sia dalla libreria STISIM
Drive che esterni, creati tramite il software di progettazione Autodesk 3DS Max.
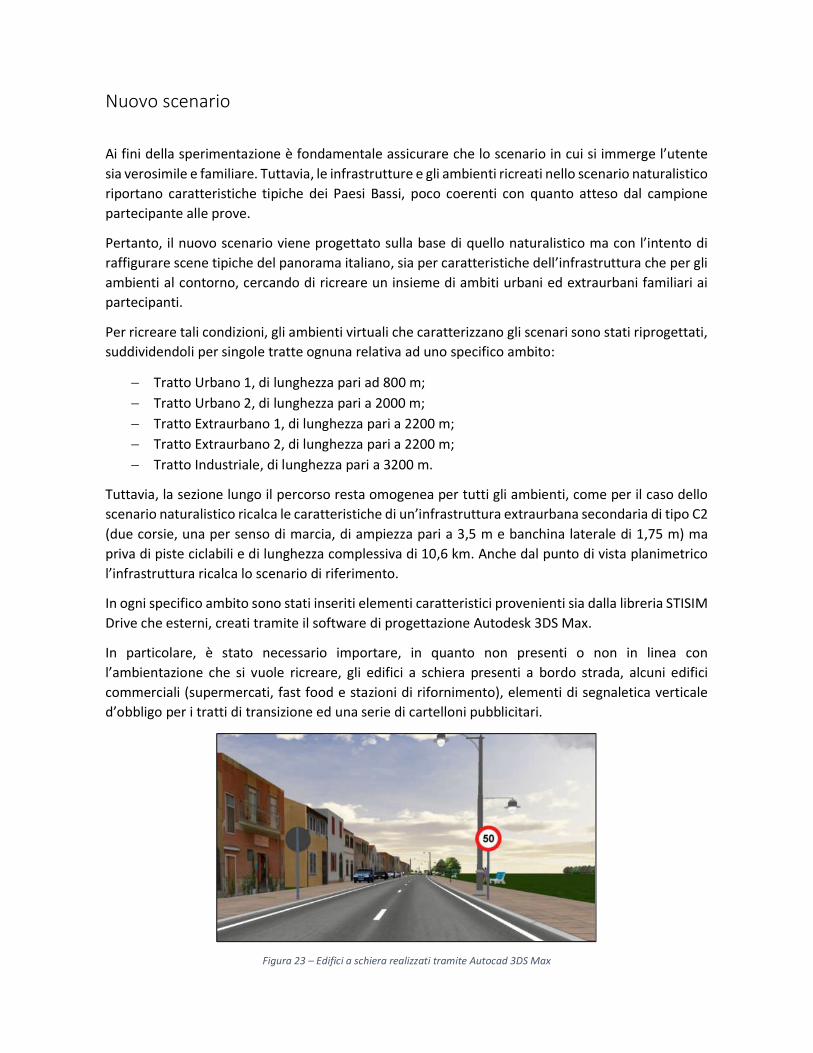
In particolare, è stato necessario importare, in quanto non presenti o non in linea con
l’ambientazione che si vuole ricreare, gli edifici a schiera presenti a bordo strada, alcuni edifici
commerciali (supermercati, fast food e stazioni di rifornimento), elementi di segnaletica verticale
d’obbligo per i tratti di transizione ed una serie di cartelloni pubblicitari.
Figura 23 – Edifici a schiera realizzati tramite Autocad 3DS Max
In particolare, tramite immagini da Google Maps sono stati riportati in formato virtuale abitazioni e
locali tipici dei paesi della Provincia di Forlì, così come i viali alberati e la configurazione dei parcheggi
in prossimità delle abitazioni.
L’ambiente al contorno è stato configurato cercando appunto di riprodurre lo scenario dei territori
dell’Emilia-Romagna dove, tipicamente, le infrastrutture extraurbane sono per gran parte
pianeggianti ed i Comuni attraversati sono costituiti da abitazioni a schiera, a due piani.
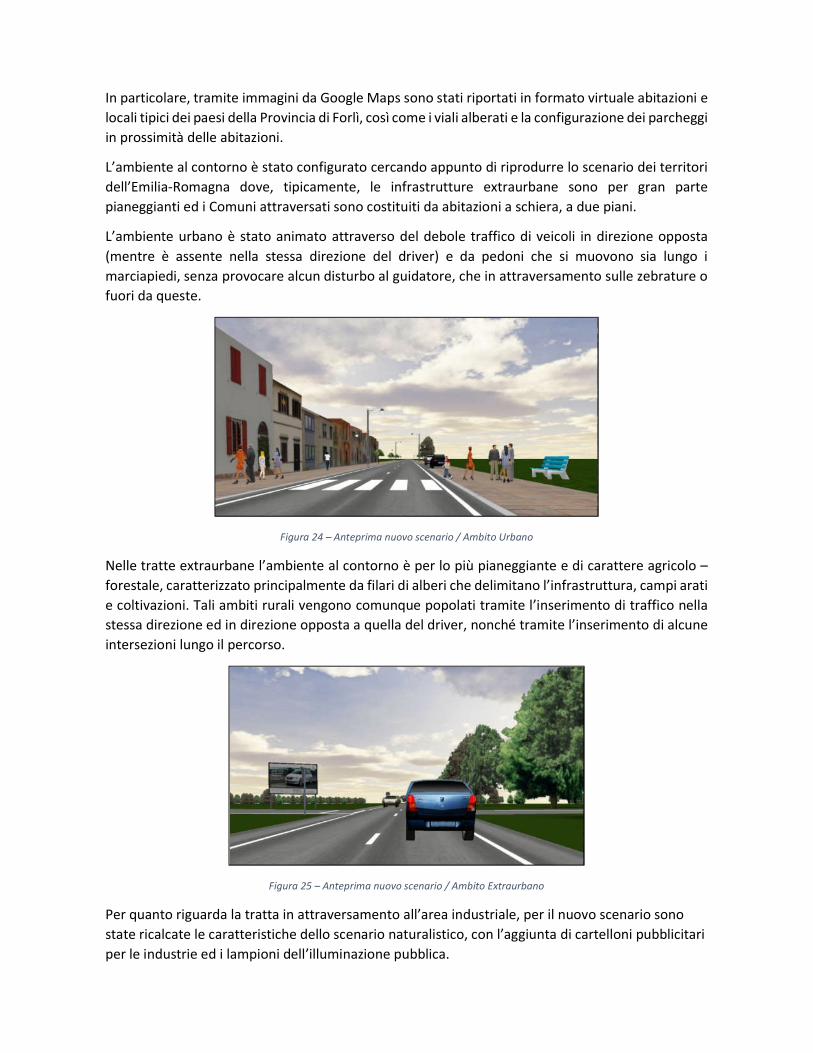
L’ambiente urbano è stato animato attraverso del debole traffico di veicoli in direzione opposta
(mentre è assente nella stessa direzione del driver) e da pedoni che si muovono sia lungo i
marciapiedi, senza provocare alcun disturbo al guidatore, che in attraversamento sulle zebrature o
fuori da queste.
Figura 24 – Anteprima nuovo scenario / Ambito Urbano
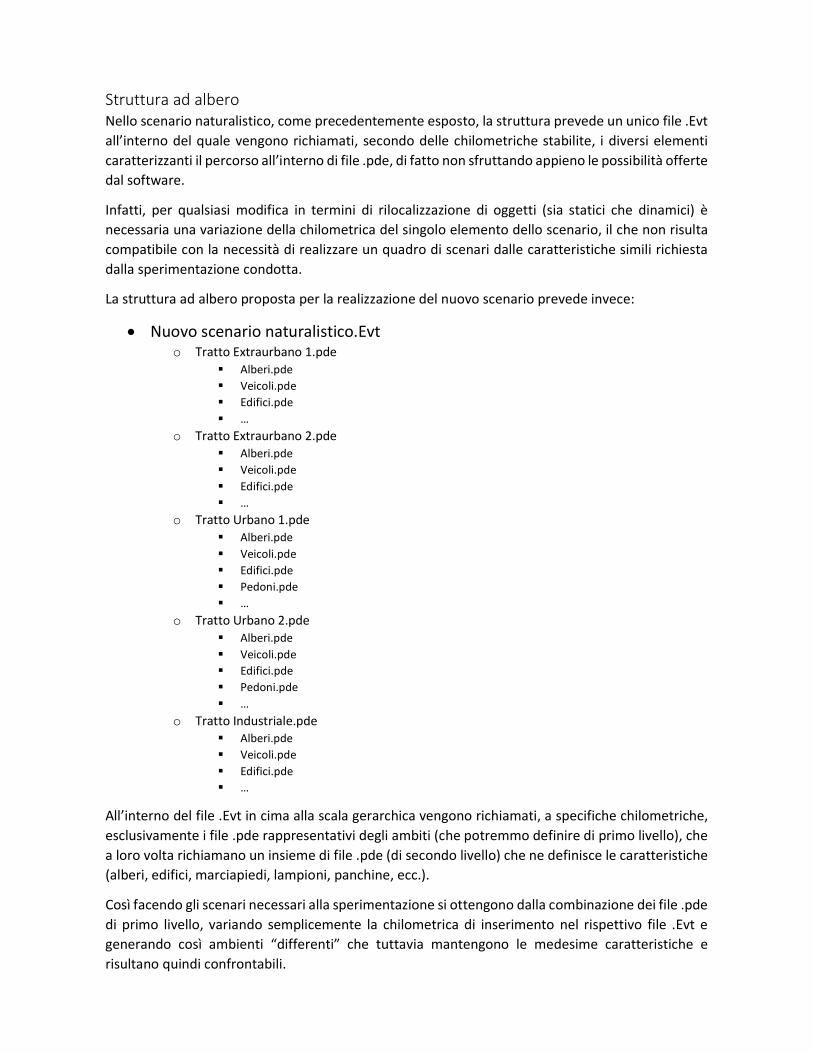
Nelle tratte extraurbane l’ambiente al contorno è per lo più pianeggiante e di carattere agricolo –
forestale, caratterizzato principalmente da filari di alberi che delimitano l’infrastruttura, campi arati
e coltivazioni. Tali ambiti rurali vengono comunque popolati tramite l’inserimento di traffico nella
stessa direzione ed in direzione opposta a quella del driver, nonché tramite l’inserimento di alcune
intersezioni lungo il percorso.
Figura 25 – Anteprima nuovo scenario / Ambito Extraurbano
Per quanto riguarda la tratta in attraversamento all’area industriale, per il nuovo scenario sono
state ricalcate le caratteristiche dello scenario naturalistico, con l’aggiunta di cartelloni pubblicitari
per le industrie ed i lampioni dell’illuminazione pubblica.
Struttura ad albero Nello scenario naturalistico, come precedentemente esposto, la struttura prevede un unico file .Evt
all’interno del quale vengono richiamati, secondo delle chilometriche stabilite, i diversi elementi
caratterizzanti il percorso all’interno di file .pde, di fatto non sfruttando appieno le possibilità offerte
dal software.
Infatti, per qualsiasi modifica in termini di rilocalizzazione di oggetti (sia statici che dinamici) è
necessaria una variazione della chilometrica del singolo elemento dello scenario, il che non risulta
compatibile con la necessità di realizzare un quadro di scenari dalle caratteristiche simili richiesta
dalla sperimentazione condotta.
La struttura ad albero proposta per la realizzazione del nuovo scenario prevede invece:
Nuovo scenario naturalistico.Evt o Tratto Extraurbano 1.pde
Alberi.pde
Veicoli.pde
Edifici.pde
…
o Tratto Extraurbano 2.pde Alberi.pde
Veicoli.pde
Edifici.pde
…
o Tratto Urbano 1.pde Alberi.pde
Veicoli.pde
Edifici.pde
Pedoni.pde
…
o Tratto Urbano 2.pde Alberi.pde
Veicoli.pde
Edifici.pde
Pedoni.pde
…
o Tratto Industriale.pde Alberi.pde
Veicoli.pde
Edifici.pde
…
All’interno del file .Evt in cima alla scala gerarchica vengono richiamati, a specifiche chilometriche,
esclusivamente i file .pde rappresentativi degli ambiti (che potremmo definire di primo livello), che
a loro volta richiamano un insieme di file .pde (di secondo livello) che ne definisce le caratteristiche
(alberi, edifici, marciapiedi, lampioni, panchine, ecc.).
Così facendo gli scenari necessari alla sperimentazione si ottengono dalla combinazione dei file .pde
di primo livello, variando semplicemente la chilometrica di inserimento nel rispettivo file .Evt e
generando così ambienti “differenti” che tuttavia mantengono le medesime caratteristiche e
risultano quindi confrontabili.
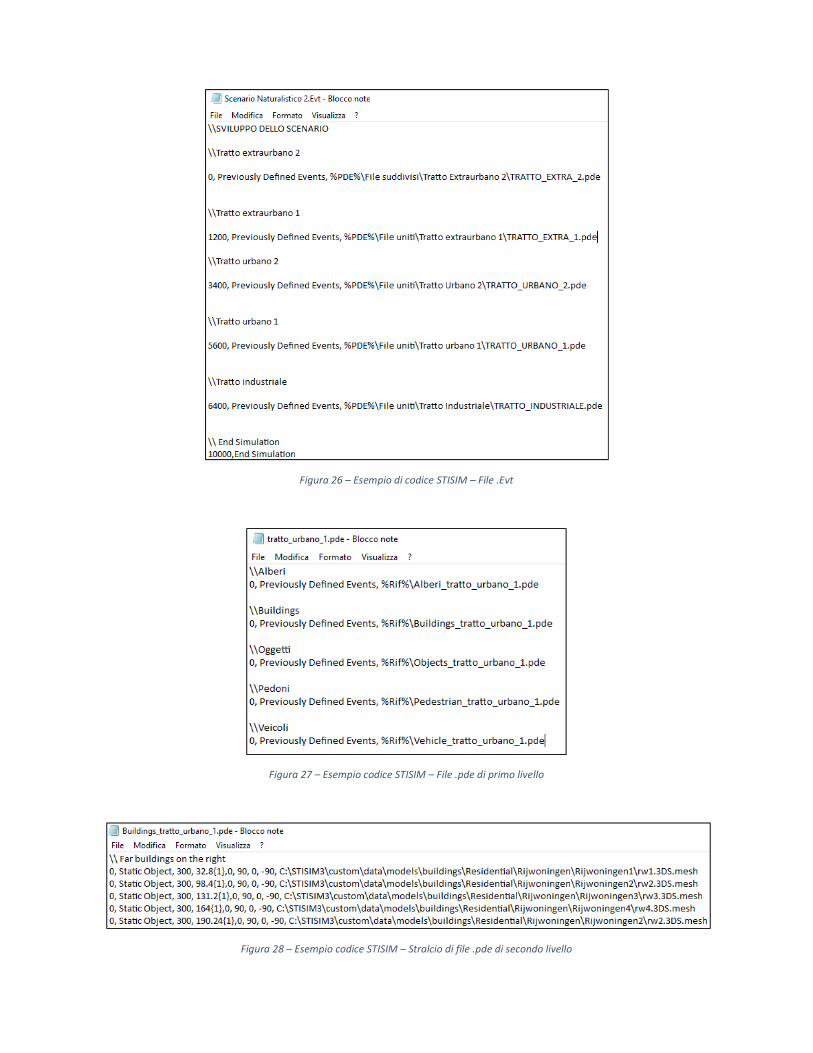
Figura 26 – Esempio di codice STISIM – File .Evt
Figura 27 – Esempio codice STISIM – File .pde di primo livello
Figura 28 – Esempio codice STISIM – Stralcio di file .pde di secondo livello
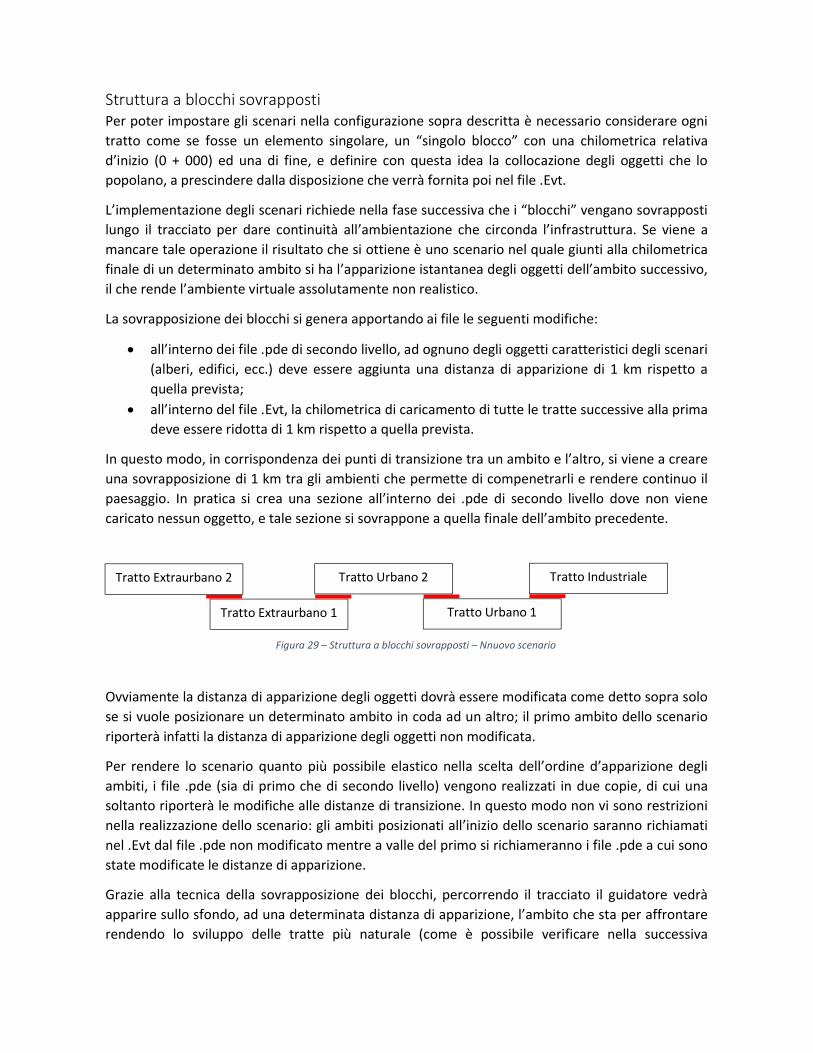
Struttura a blocchi sovrapposti Per poter impostare gli scenari nella configurazione sopra descritta è necessario considerare ogni
tratto come se fosse un elemento singolare, un “singolo blocco” con una chilometrica relativa
d’inizio (0 + 000) ed una di fine, e definire con questa idea la collocazione degli oggetti che lo
popolano, a prescindere dalla disposizione che verrà fornita poi nel file .Evt.
L’implementazione degli scenari richiede nella fase successiva che i “blocchi” vengano sovrapposti
lungo il tracciato per dare continuità all’ambientazione che circonda l’infrastruttura. Se viene a
mancare tale operazione il risultato che si ottiene è uno scenario nel quale giunti alla chilometrica
finale di un determinato ambito si ha l’apparizione istantanea degli oggetti dell’ambito successivo,
il che rende l’ambiente virtuale assolutamente non realistico.
La sovrapposizione dei blocchi si genera apportando ai file le seguenti modifiche:
all’interno dei file .pde di secondo livello, ad ognuno degli oggetti caratteristici degli scenari
(alberi, edifici, ecc.) deve essere aggiunta una distanza di apparizione di 1 km rispetto a
quella prevista;
all’interno del file .Evt, la chilometrica di caricamento di tutte le tratte successive alla prima
deve essere ridotta di 1 km rispetto a quella prevista.
In questo modo, in corrispondenza dei punti di transizione tra un ambito e l’altro, si viene a creare
una sovrapposizione di 1 km tra gli ambienti che permette di compenetrarli e rendere continuo il
paesaggio. In pratica si crea una sezione all’interno dei .pde di secondo livello dove non viene
caricato nessun oggetto, e tale sezione si sovrappone a quella finale dell’ambito precedente.
Ovviamente la distanza di apparizione degli oggetti dovrà essere modificata come detto sopra solo
se si vuole posizionare un determinato ambito in coda ad un altro; il primo ambito dello scenario
riporterà infatti la distanza di apparizione degli oggetti non modificata.
Per rendere lo scenario quanto più possibile elastico nella scelta dell’ordine d’apparizione degli
ambiti, i file .pde (sia di primo che di secondo livello) vengono realizzati in due copie, di cui una
soltanto riporterà le modifiche alle distanze di transizione. In questo modo non vi sono restrizioni
nella realizzazione dello scenario: gli ambiti posizionati all’inizio dello scenario saranno richiamati
nel .Evt dal file .pde non modificato mentre a valle del primo si richiameranno i file .pde a cui sono
state modificate le distanze di apparizione.
Grazie alla tecnica della sovrapposizione dei blocchi, percorrendo il tracciato il guidatore vedrà
apparire sullo sfondo, ad una determinata distanza di apparizione, l’ambito che sta per affrontare
rendendo lo sviluppo delle tratte più naturale (come è possibile verificare nella successiva
Tratto Extraurbano 2
Tratto Extraurbano 1
Tratto Urbano 2
Tratto Urbano 1
Tratto Industriale
Figura 29 – Struttura a blocchi sovrapposti – Nnuovo scenario
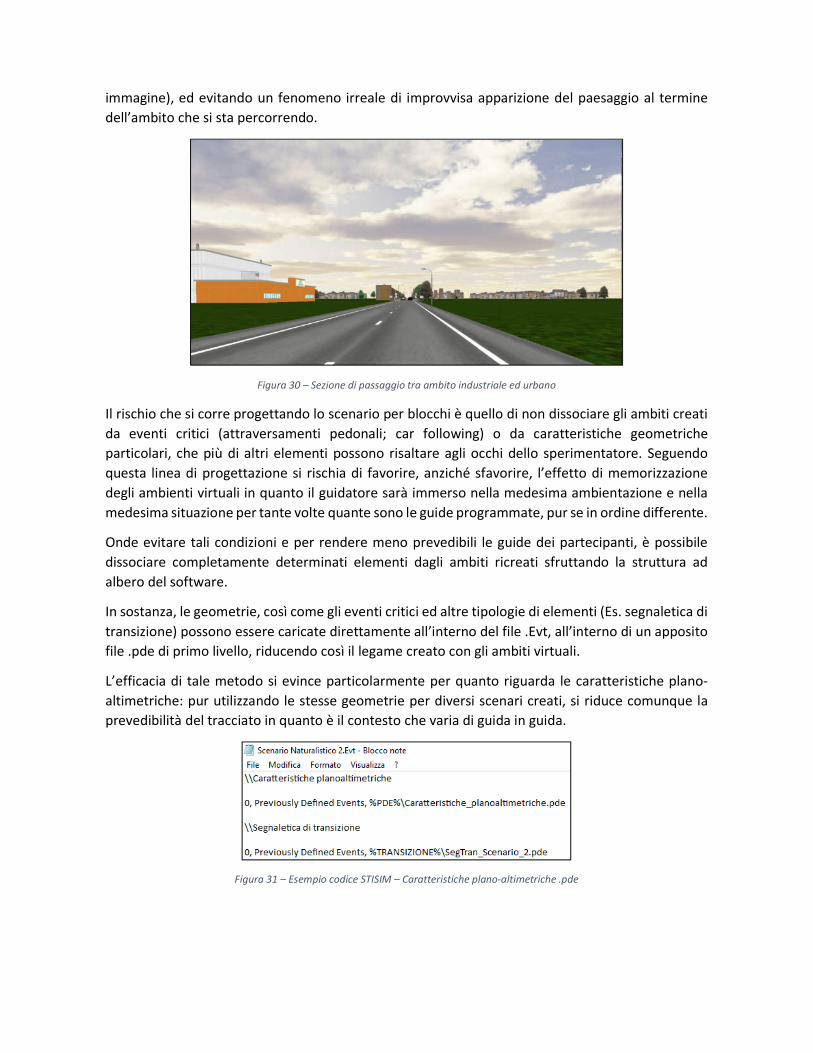
immagine), ed evitando un fenomeno irreale di improvvisa apparizione del paesaggio al termine
dell’ambito che si sta percorrendo.
Figura 30 – Sezione di passaggio tra ambito industriale ed urbano
Il rischio che si corre progettando lo scenario per blocchi è quello di non dissociare gli ambiti creati
da eventi critici (attraversamenti pedonali; car following) o da caratteristiche geometriche
particolari, che più di altri elementi possono risaltare agli occhi dello sperimentatore. Seguendo
questa linea di progettazione si rischia di favorire, anziché sfavorire, l’effetto di memorizzazione
degli ambienti virtuali in quanto il guidatore sarà immerso nella medesima ambientazione e nella
medesima situazione per tante volte quante sono le guide programmate, pur se in ordine differente.
Onde evitare tali condizioni e per rendere meno prevedibili le guide dei partecipanti, è possibile
dissociare completamente determinati elementi dagli ambiti ricreati sfruttando la struttura ad
albero del software.
In sostanza, le geometrie, così come gli eventi critici ed altre tipologie di elementi (Es. segnaletica di
transizione) possono essere caricate direttamente all’interno del file .Evt, all’interno di un apposito
file .pde di primo livello, riducendo così il legame creato con gli ambiti virtuali.
L’efficacia di tale metodo si evince particolarmente per quanto riguarda le caratteristiche plano-
altimetriche: pur utilizzando le stesse geometrie per diversi scenari creati, si riduce comunque la
prevedibilità del tracciato in quanto è il contesto che varia di guida in guida.
Figura 31 – Esempio codice STISIM – Caratteristiche plano-altimetriche .pde

Eventi critici Con lo scopo di conoscere ed analizzare il comportamento del campione in particolari frangenti alla
guida sia in condizioni distratte che in condizioni non distratte, attraverso la stesura di particolari
righe di codice STISIM Drive, sono stati progettati una serie di eventi che richiedono una reazione
del guidatore.
Gli eventi critici vengono inseriti all’interno di tutti gli scenari in egual numero, ma di volta in volta
collocati in chilometriche differenti e scaturiti da situazioni differenti, onde evitare che il driver, a
valle della prima sessione, sia consapevole di ciò che accadrà lungo il tracciato ed agisca di
conseguenza inficiando gli output della prova.
Come per le caratteristiche plano-altimetriche ma ancor di più in questo caso, la soluzione ottimale
per collocare gli eventi lungo il percorso è quella di creare dei file .pde di primo livello appositi e
richiamarli direttamente all’interno del file .Evt, in maniera da dissociarli dagli ambiti del paesaggio
creati.
Figura 32 – Esempio codice STISIM – Eventi critici .pde
Di seguito si riportano le tipologie di eventi scelte per la sperimentazione, le caratteristiche e le righe
di codice inserite all’interno di appositi file .pde di primo livello, richiamati come mostrato in Figura
24.
Car Following
Sulla base di quanto raccolto durante la ricerca bibliografica in termini di caratteristiche
tecniche dell’evento, in particolare dallo studio condotto da Benedetto A., 2012, il modello
di car following viene configurato come segue: il veicolo di testa si posiziona sulla medesima
corsia del veicolo del tester quando questo si trova ad 8 secondi di TTC (Time to Collision) e
procede alla velocità costante di 70 km/h per una distanza di 1000 m, dopodiché effettua
una brusca frenata con una decelerazione di 5 m/s2 e si ferma al centro della corsia. Il veicolo
non riparte finché il veicolo del tester non ha raggiunto una velocità inferiore ai 5 km/h.
Figura 33 – Esempio di codice STISIM Drive – Car Following
0, Vehicles, 400, 1.75{0}, 60{4}, 1, F6, 1, 1, &
170{5}; ! 1950{7}, 2, 100{4}, , , 2, &
2000{7}, 2, 19.4{0}, , , 1, &
3121{7}, 2, 0{0}, , , 3.89, &
2{22}, 2, 6.9{0}, , , 2, &
3153.25{7}, 7, 2, 10

Attraversamento pedonale dentro/fuori dall’apposita segnaletica orizzontale
Le caratteristiche tecniche dell’evento sono state raccolte durante la fase di studio e si
riferiscono agli studi condotti da Bella F., 2017 e Bella F. et al, 2018. Durante la marcia del
veicolo tester, in ambito urbano, i pedoni attraversano la carreggiata partendo dal margine
destro della strada, sulle strisce pedonali o al di fuori di queste, con una velocità di 1,4 m/s
iniziando la propria marcia quando sono posti ad una distanza dal veicolo del partecipante
di 55,6 m in maniera tale da avere un TTZ (Time To Zebra) di 4 secondi e quindi effettuare
un attraversamento “azzardato”.
Figura 34 – Esempio di codice STISIM Drive – Attraversamento pedonale
3575, Pedestrian#3, 0, 55.6{5}, 1.4, 2.5{1}, R, *12~19, 15















![Relazione di tirocinio - core.ac.uk · 2009/2010 Università degli studi di Padova Ingegneria Informatica Studente: Maroso Alessandro Docente: Rumor Massimo [RELAZIONE DI TIROCINIO]](https://img.pdfslide.tips/doc/110x75/5c6669e309d3f2d12a8c42f6/relazione-di-tirocinio-coreacuk-20092010-universita-degli-studi-di-padova.jpg)


![Relazione di tirocinio - Benvenuti su Padua@Thesis - …tesi.cab.unipd.it/26048/1/Relazione_Tirocinio_579301.pdf · 2010-11-16 · [RELAZIONE DI TIROCINIO] ... dei requisiti da parte](https://img.pdfslide.tips/doc/110x75/5c65954e09d3f2826e8cda64/relazione-di-tirocinio-benvenuti-su-paduathesis-tesicabunipdit260481relazionetirocinio.jpg)










