Embed Size (px)
Citation preview

Signals and Systems ��. ���� ��� � Telecommunications Engineering, KMITL
Homework 2 SOLUTIONS
1. ��ก��������� � (signal waveform) ������� ����� u(t) ��� step function ��� r(t) ��� ramp
function
(a) x(t) = u(t+1) – 2u(t) + u(t-1)
SOLUTION:
(b) y(t) = r(t+2) – r(t+1) –r(t-1) + r(t-2)
SOLUTION:
2. ���� H ��ก���� !"����"��" H1, H2, H3, H4 ��#� $#% ��ก ��! ����&��'���%!� #�(�&)�-
�� +�&)�,�#������� - y(t) = H{x(t)} ���
H1: y1(t) = x1(t)x1(t-1)
H2: y2(t) = |x2(t)|
H3: y3(t) = 1 + 2x3(t)
H4: y4(t) = cos(x4(t))
H1
H3
H2
H4
Σ
Σ
x(t)
y(t)
+
+
+
-

Signals and Systems ��. ���� ��� � Telecommunications Engineering, KMITL
SOLUTION: �ก�����������
�������ก���� (5) ������ก����� �! �"#�����$%�!��-�%�#!��'%$��((��)
3. $ ก���� LTI (linear time-invariant system) � ��� # �����.���(�&)� x1(t) �, �.�����$���
�� ��&)� y1(t) ��#�
$#% �� ��&)� y2(t) ��� y3(t) - �(�&)� �/� x2(t) ��� x3(t)
� $� )� ���'��������
�%�#!����� �*%
�%��ก���� (1) +�� (3) �+��,� (4)
H (LTI)
-1 t
0 1 2
1
x3(t) x2(t)
t 0 1 2 3 4
1
-1
x1(t)
t 0 1 2
1
y1(t)
t 0 1 2
1
2

Signals and Systems ��. ���� ��� � Telecommunications Engineering, KMITL
SOLUTION:
�'��� x2(t) = x1(t) – x1(t-2) ��*�%$�ก��((����+(( LTI ��������� y2(t) = y1(t) – y1(t-2)
,��-�%$�����ก �
�'��� x3(t) = x1(t+1) + x1(t) ��������� y3(t) = y1(t+1) – y1(t)
4. - y(t) = [cos(3t)] x(t) $#% !� ����������)������(�%�� ���%������
(a) Memoryless
SOLUTION: YES. �!�� y(t) '.)�ก (%�!�������� t ���� )�
(b) Time-invariant
SOLUTION: NO.
�ก y1(t) = [cos(3t)]x1(t)
��*�%�%�!��: ,�� x2(t) = x1(t-t0)
����� y2(t) = [cos(3t)]x2(t) = [cos(3t)] x1(t-t0)
��*�%��%�#!��: y1(t-t0) = [cos(3 t-3t0)]x1(t-t0)
����*�%�%�!���� t0 +���%�#!�������� ���,/�ก���*�%��%�#!������� t0
(c) Linear
SOLUTION: YES.
,�� x(t) = ax1(t) + bx2(t)
����� y(t) = cos(3t)[ ax1(t) + bx2(t)]
= ax1(t)cos(3t) + bx2(t)cos(3t)
= ay1(t) + by2(t)
y2(t)
t 0 1 2 3 4
1
2
1
2
y1(t)
t -1 0 1 2

Signals and Systems ��. ���� ��� � Telecommunications Engineering, KMITL
(d) Causal
SOLUTION: YES. ��((����+((�������- 0�� )�ก���%$������((+(( causal ����
(e) Stable
SOLUTION: YES. 1�,�� |x(t)| ≤ M, ∀t
|y(t)| = |cos(3t) x(t)| ≤ |cos(3t)|| x(t)| ≤ 1 ⋅ M = M, ∀t
5. H �/����� linear +���� �! ����&��'� �(�&)�-�� +�&)���#���#.��� ��� #
(a) H �/�������� causal %������
SOLUTION: NO. 1���((����+(( causal +��� 1�%�!�������ก��� t0 �%�#!������%$�������ก�%�
���� )� +���ก x2(t) +�� y2(t) �������� x2(t) ������� t=1 +�� y2(t) ����ก�%���� t=0
(b) H �/�������� time-invariant %������
SOLUTION: NO. �!�� x3(t) = x1(t-1) +�� y3(t) ≠ y1(t-1)
H
x2(t)
t 0 1 2 3 4
1
H
H
x1(t)
t 0 1 2
1
x3(t)
t 0 1 2
1
y1(t)
t 0 1 2 3 4
1
y3(t)
t 0 1 2 3 4
1
y2(t)
t 0 1 2 3 4
1
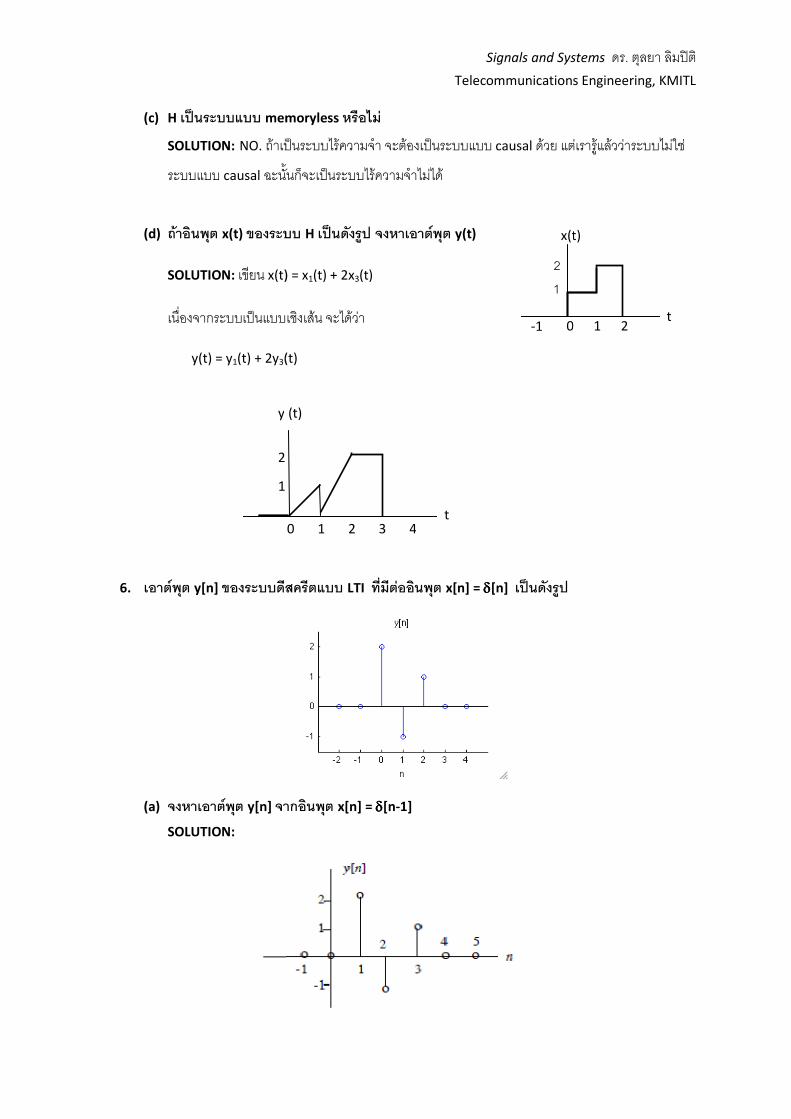
(c) H �/�������� memoryless
SOLUTION: NO. 1�������((�������- ����%$������((+((
��((+(( causal 0�� )�ก���������((�������-������
(d) - �(�&)� x(t) ,�#����
SOLUTION: �'��� x(t) = x
��*�%$�ก��((����+((�/$���� �������
y(t) = y1(t) + 2y3(t)
6. �� ��&)� y[n] ,�#��������������
(a) $#% �� ��&)� y[n] $ ก�(�&)�
SOLUTION:
y
1
2
Signals and Systems
Telecommunications Engineering, KMITL
memoryless %������
1�������((�������- ����%$������((+(( causal ���� +�������+�������((���,/�
0�� )�ก���������((�������-������
,�#���� H �/���#� $#% �� ��&)� y(t)
x(t) = x1(t) + 2x3(t)
��*�%$�ก��((����+((�/$���� �������
(t)
,�#�������������� LTI +��������(�&)� x[n] = δδδδ[n] �/���#�
$ ก�(�&)� x[n] = δδδδ[n-1]
-1
x(t)
0 1 2
1 2
(t)
t 0 1 2 3 4
Systems ��. ���� ��� � Telecommunications Engineering, KMITL
���� +�������+�������((���,/�
x(t)
t 0 1 2

(b) $#% �� ��&)� y[n] $ ก�(�&)�
SOLUTION:
7. $#% convolution sum
h[n] �/���#�
SOLUTION:
8. MATLAB: (�0�"�"ก)
Signals and Systems
Telecommunications Engineering, KMITL
$ ก�(�&)� x[n] = 2δδδδ[n]- δδδδ[n-2]
convolution sum ���� � ∑ ����� � �� �� - �(�&)� x[n] ���
1
2
3
-1
-2
-3
y[n] ����� $���
Systems ��. ���� ��� � Telecommunications Engineering, KMITL
��� impulse response









![Continuous Time Signals & Systems: Part Ieeweb.poly.edu/~yao/EE3054/Chap9.1_9.5.pdf · Signals and Systems Continuous Time Signals & Systems: Part I Yao Wang ... DISCRETE-TIME: x[n]](https://img.pdfslide.tips/doc/110x75/5b8493d97f8b9ae0498c7b9d/continuous-time-signals-systems-part-yaoee3054chap9195pdf-signals-and.jpg)