Embed Size (px)
Citation preview
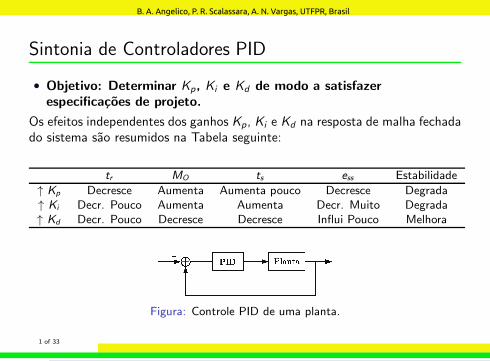
Sintonia de Controladores PID
• Objetivo: Determinar Kp, Ki e Kd de modo a satisfazer
especificacoes de projeto.
Os efeitos independentes dos ganhos Kp, Ki e Kd na resposta de malha fechadado sistema sao resumidos na Tabela seguinte:
tr MO ts ess Estabilidade
↑ Kp Decresce Aumenta Aumenta pouco Decresce Degrada↑ Ki Decr. Pouco Aumenta Aumenta Decr. Muito Degrada↑ Kd Decr. Pouco Decresce Decresce Influi Pouco Melhora
Figura: Controle PID de uma planta.
1 of 33
B. A. Angelico, P. R. Scalassara, A. N. Vargas, UTFPR, Brasil
Sintonia de Controladores PID
• PID apresenta muitas vantagens. A industria percebeu isso, o que justificaque a maior parte dos controladores industriais empregam esquemas decontrole baseados em PID.
• Os controladores PID na industria comumente sao ajustadosempiricamente (tentativa-erro).
• Metodos de sintonia automatica vem sendo desenvolvidas e algumasimplementacoes industriais de controlador PID tem a capacidade deefetuar a sintonia automatica on-line.
• Regras empıricas sao propostas na literatura e permitem ajustar osparametros do PID sem conhecimento do modelo matematico da planta.
• Tais regras fornecem estimativas dos valores dos parametros docontrolador e proporcionam um ponto de partida para uma sintonia maisfina, caso necessaria.
2 of 33
B. A. Angelico, P. R. Scalassara, A. N. Vargas, UTFPR, Brasil
Sintonia de Controladores PID
+−
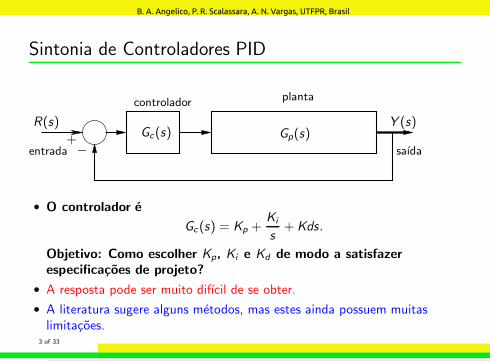
R(s) Y (s)Gp(s)Gc(s)
plantacontrolador
entrada saıda
• O controlador e
Gc(s) = Kp +Ki
s+ Kds.
Objetivo: Como escolher Kp, Ki e Kd de modo a satisfazer
especificacoes de projeto?
• A resposta pode ser muito difıcil de se obter.
• A literatura sugere alguns metodos, mas estes ainda possuem muitaslimitacoes.
3 of 33
B. A. Angelico, P. R. Scalassara, A. N. Vargas, UTFPR, Brasil
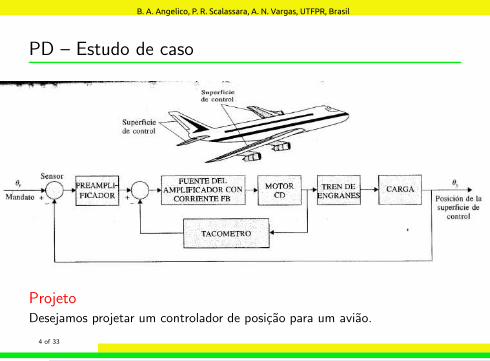
PD – Estudo de caso
ProjetoDesejamos projetar um controlador de posicao para um aviao.
4 of 33
B. A. Angelico, P. R. Scalassara, A. N. Vargas, UTFPR, Brasil
PD – Estudo de caso
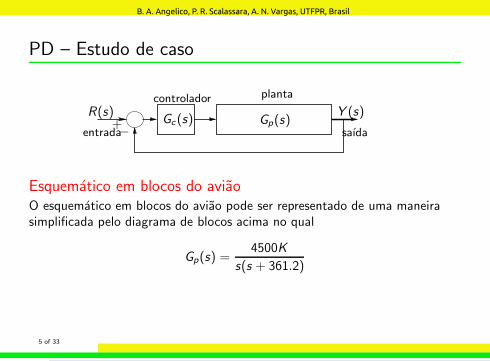
+−R(s) Y (s)
Gp(s)Gc(s)
plantacontrolador
entrada saıda
Esquematico em blocos do aviaoO esquematico em blocos do aviao pode ser representado de uma maneirasimplificada pelo diagrama de blocos acima no qual
Gp(s) =4500K
s(s + 361.2)
5 of 33
B. A. Angelico, P. R. Scalassara, A. N. Vargas, UTFPR, Brasil

PD – Estudo de caso
+−
R(s) Y (s)4500K
s(s+361.2)Gc(s)
plantacontrolador
entrada saıda
ProjetoDetermine o controlador Gc(s) de modo que:(a) Erro estacionario devido a entrada rampa unitaria ≤ 0.000433.
(b) Maximo overshoot ≤ 5%.
(c) Tempo subida tr ≤ 0.005 seg.
(d) Tempo assentamento ts ≤ 0.005 seg.
6 of 33
B. A. Angelico, P. R. Scalassara, A. N. Vargas, UTFPR, Brasil
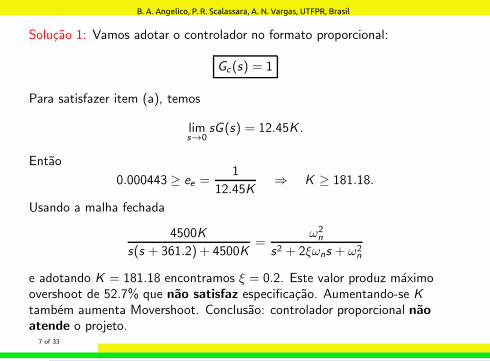
Solucao 1: Vamos adotar o controlador no formato proporcional:
Gc(s) = 1
Para satisfazer item (a), temos
lims→0
sG(s) = 12.45K .
Entao
0.000443 ≥ ee =1
12.45K⇒ K ≥ 181.18.
Usando a malha fechada
4500K
s(s + 361.2) + 4500K=
ω2n
s2 + 2ξωns + ω2n
e adotando K = 181.18 encontramos ξ = 0.2. Este valor produz maximoovershoot de 52.7% que nao satisfaz especificacao. Aumentando-se K
tambem aumenta Movershoot. Conclusao: controlador proporcional naoatende o projeto.
7 of 33
B. A. Angelico, P. R. Scalassara, A. N. Vargas, UTFPR, Brasil
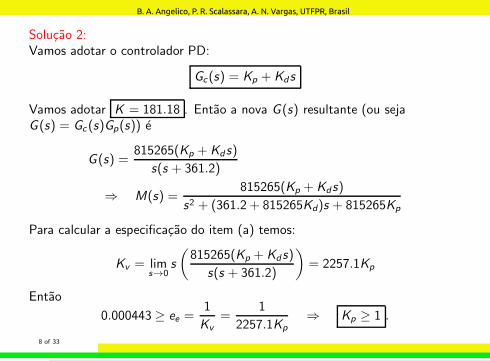
Solucao 2:Vamos adotar o controlador PD:
Gc(s) = Kp + Kds
Vamos adotar K = 181.18 . Entao a nova G(s) resultante (ou sejaG(s) = Gc(s)Gp(s)) e
G(s) =815265(Kp + Kds)
s(s + 361.2)
⇒ M(s) =815265(Kp + Kds)
s2 + (361.2 + 815265Kd)s + 815265Kp
Para calcular a especificacao do item (a) temos:
Kv = lims→0
s
(
815265(Kp + Kds)
s(s + 361.2)
)
= 2257.1Kp
Entao
0.000443 ≥ ee =1
Kv
=1
2257.1Kp
⇒ Kp ≥ 1 .
8 of 33
B. A. Angelico, P. R. Scalassara, A. N. Vargas, UTFPR, Brasil
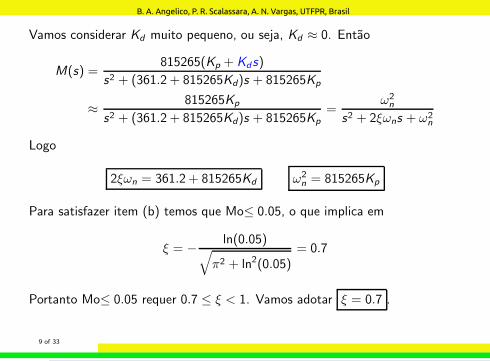
Vamos considerar Kd muito pequeno, ou seja, Kd ≈ 0. Entao
M(s) =815265(Kp + Kds)
s2 + (361.2 + 815265Kd)s + 815265Kp
≈815265Kp
s2 + (361.2 + 815265Kd)s + 815265Kp
=ω2n
s2 + 2ξωns + ω2n
Logo
2ξωn = 361.2 + 815265Kd ω2n = 815265Kp
Para satisfazer item (b) temos que Mo≤ 0.05, o que implica em
ξ = −ln(0.05)
√
π2 + ln2(0.05)= 0.7
Portanto Mo≤ 0.05 requer 0.7 ≤ ξ < 1. Vamos adotar ξ = 0.7 .
9 of 33
B. A. Angelico, P. R. Scalassara, A. N. Vargas, UTFPR, Brasil
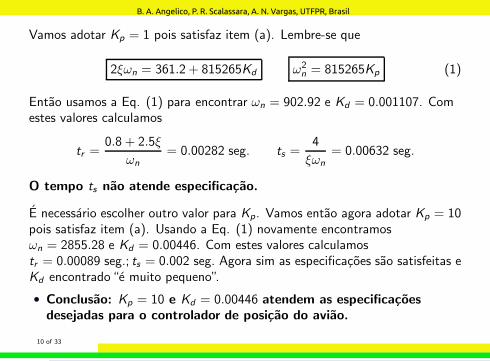
Vamos adotar Kp = 1 pois satisfaz item (a). Lembre-se que
2ξωn = 361.2 + 815265Kd ω2n = 815265Kp (1)
Entao usamos a Eq. (1) para encontrar ωn = 902.92 e Kd = 0.001107. Comestes valores calculamos
tr =0.8 + 2.5ξ
ωn
= 0.00282 seg. ts =4
ξωn
= 0.00632 seg.
O tempo ts nao atende especificacao.
E necessario escolher outro valor para Kp. Vamos entao agora adotar Kp = 10pois satisfaz item (a). Usando a Eq. (1) novamente encontramosωn = 2855.28 e Kd = 0.00446. Com estes valores calculamostr = 0.00089 seg.; ts = 0.002 seg. Agora sim as especificacoes sao satisfeitas eKd encontrado“e muito pequeno”.
• Conclusao: Kp = 10 e Kd = 0.00446 atendem as especificacoes
desejadas para o controlador de posicao do aviao.
10 of 33
B. A. Angelico, P. R. Scalassara, A. N. Vargas, UTFPR, Brasil
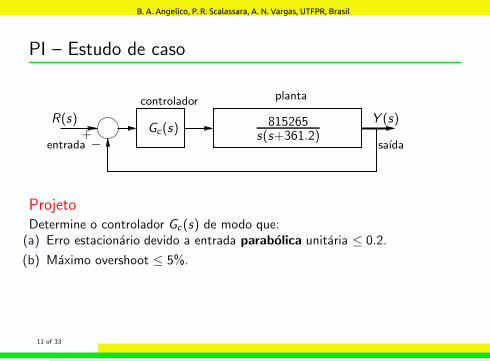
PI – Estudo de caso
+−
R(s) Y (s)815265s(s+361.2)
Gc(s)
plantacontrolador
entrada saıda
ProjetoDetermine o controlador Gc(s) de modo que:(a) Erro estacionario devido a entrada parabolica unitaria ≤ 0.2.
(b) Maximo overshoot ≤ 5%.
11 of 33
B. A. Angelico, P. R. Scalassara, A. N. Vargas, UTFPR, Brasil
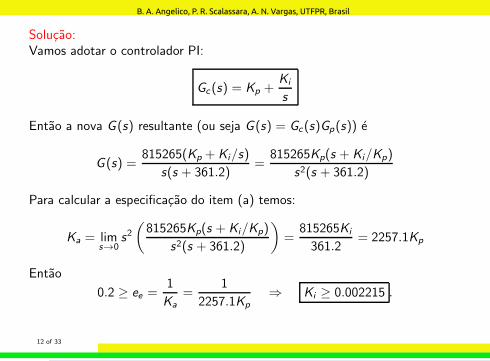
Solucao:Vamos adotar o controlador PI:
Gc(s) = Kp +Ki
s
Entao a nova G(s) resultante (ou seja G(s) = Gc(s)Gp(s)) e
G(s) =815265(Kp + Ki/s)
s(s + 361.2)=
815265Kp(s + Ki/Kp)
s2(s + 361.2)
Para calcular a especificacao do item (a) temos:
Ka = lims→0
s2(
815265Kp(s + Ki/Kp)
s2(s + 361.2)
)
=815265Ki
361.2= 2257.1Kp
Entao
0.2 ≥ ee =1
Ka
=1
2257.1Kp
⇒ Ki ≥ 0.002215 .
12 of 33
B. A. Angelico, P. R. Scalassara, A. N. Vargas, UTFPR, Brasil
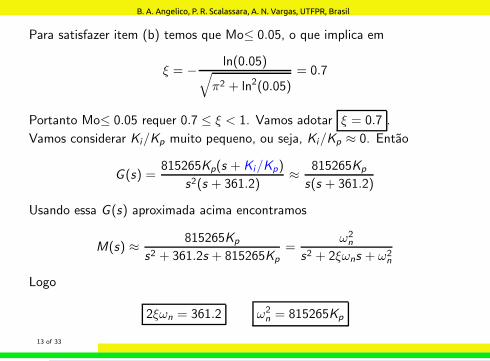
Para satisfazer item (b) temos que Mo≤ 0.05, o que implica em
ξ = −ln(0.05)
√
π2 + ln2(0.05)= 0.7
Portanto Mo≤ 0.05 requer 0.7 ≤ ξ < 1. Vamos adotar ξ = 0.7 .
Vamos considerar Ki/Kp muito pequeno, ou seja, Ki/Kp ≈ 0. Entao
G(s) =815265Kp(s + Ki/Kp)
s2(s + 361.2)≈
815265Kp
s(s + 361.2)
Usando essa G(s) aproximada acima encontramos
M(s) ≈815265Kp
s2 + 361.2s + 815265Kp
=ω2n
s2 + 2ξωns + ω2n
Logo
2ξωn = 361.2 ω2n = 815265Kp
13 of 33
B. A. Angelico, P. R. Scalassara, A. N. Vargas, UTFPR, Brasil
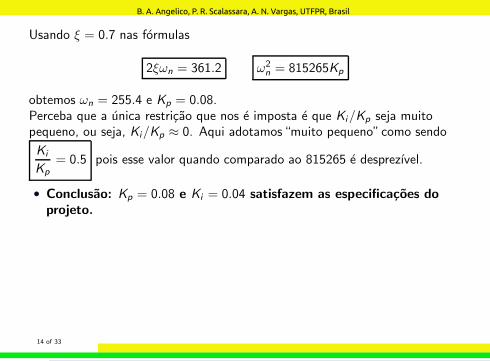
Usando ξ = 0.7 nas formulas
2ξωn = 361.2 ω2n = 815265Kp
obtemos ωn = 255.4 e Kp = 0.08.Perceba que a unica restricao que nos e imposta e que Ki/Kp seja muitopequeno, ou seja, Ki/Kp ≈ 0. Aqui adotamos“muito pequeno”como sendo
Ki
Kp
= 0.5 pois esse valor quando comparado ao 815265 e desprezıvel.
• Conclusao: Kp = 0.08 e Ki = 0.04 satisfazem as especificacoes do
projeto.
14 of 33
B. A. Angelico, P. R. Scalassara, A. N. Vargas, UTFPR, Brasil

PI – Estudo de caso
A figura mostra a influencia da escolha de Ki/Kp no maximo overshoot,tempo de subida tr e tempo de assentamento ts .
15 of 33
B. A. Angelico, P. R. Scalassara, A. N. Vargas, UTFPR, Brasil
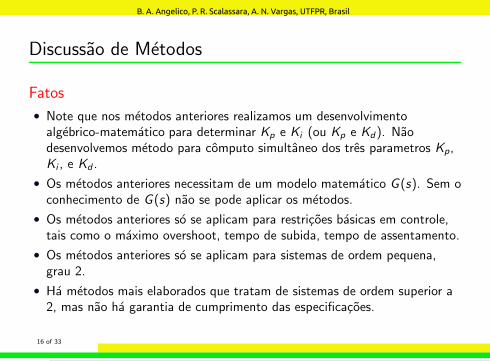
Discussao de Metodos
Fatos
• Note que nos metodos anteriores realizamos um desenvolvimentoalgebrico-matematico para determinar Kp e Ki (ou Kp e Kd). Naodesenvolvemos metodo para computo simultaneo dos tres parametros Kp,Ki , e Kd .
• Os metodos anteriores necessitam de um modelo matematico G(s). Sem oconhecimento de G(s) nao se pode aplicar os metodos.
• Os metodos anteriores so se aplicam para restricoes basicas em controle,tais como o maximo overshoot, tempo de subida, tempo de assentamento.
• Os metodos anteriores so se aplicam para sistemas de ordem pequena,grau 2.
• Ha metodos mais elaborados que tratam de sistemas de ordem superior a2, mas nao ha garantia de cumprimento das especificacoes.
16 of 33
B. A. Angelico, P. R. Scalassara, A. N. Vargas, UTFPR, Brasil
Metodos Baseados na Curva de Reacao
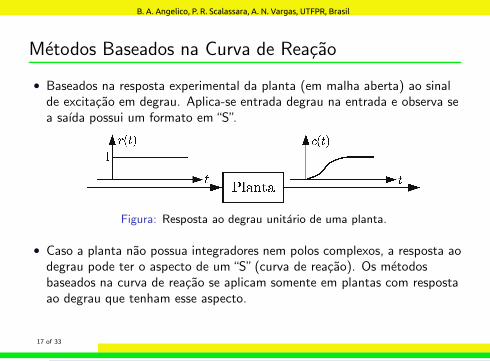
• Baseados na resposta experimental da planta (em malha aberta) ao sinalde excitacao em degrau. Aplica-se entrada degrau na entrada e observa sea saıda possui um formato em“S”.
Figura: Resposta ao degrau unitario de uma planta.
• Caso a planta nao possua integradores nem polos complexos, a resposta aodegrau pode ter o aspecto de um“S”(curva de reacao). Os metodosbaseados na curva de reacao se aplicam somente em plantas com respostaao degrau que tenham esse aspecto.
17 of 33
B. A. Angelico, P. R. Scalassara, A. N. Vargas, UTFPR, Brasil
Metodos Baseados na Curva de Reacao
A curva em“S”pode ser caracterizada pelo ganho estatico K , pelo atraso L ea constante de tempo T . A funcao de transferencia pode ser aproximada porum sistema de primeira ordem com atraso de transporte. A funcao detransferencia e−Ls corresponde a um atraso no tempo. Daı o nome atraso detransporte (ou tempo morto).
Y (s)
R(s)=
K e−Ls
Ts + 1
18 of 33
B. A. Angelico, P. R. Scalassara, A. N. Vargas, UTFPR, Brasil
Metodos Baseados na Curva de Reacao
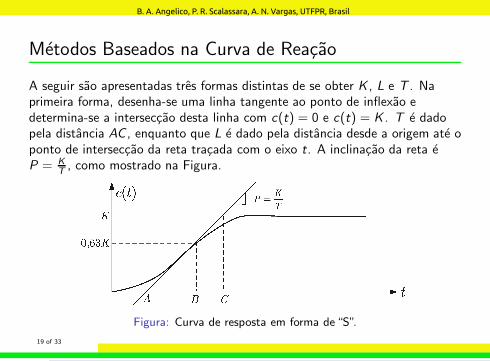
A seguir sao apresentadas tres formas distintas de se obter K , L e T . Naprimeira forma, desenha-se uma linha tangente ao ponto de inflexao edetermina-se a interseccao desta linha com c(t) = 0 e c(t) = K . T e dadopela distancia AC , enquanto que L e dado pela distancia desde a origem ate oponto de interseccao da reta tracada com o eixo t. A inclinacao da reta eP = K
T, como mostrado na Figura.
Figura: Curva de resposta em forma de“S”.
19 of 33
B. A. Angelico, P. R. Scalassara, A. N. Vargas, UTFPR, Brasil
Metodo 1 de Ziegler e Nichols:
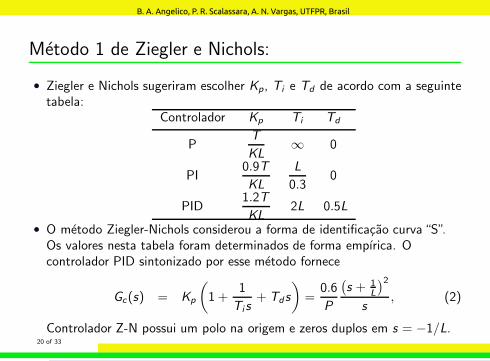
• Ziegler e Nichols sugeriram escolher Kp, Ti e Td de acordo com a seguintetabela:
Controlador Kp Ti Td
PT
KL∞ 0
PI0.9T
KL
L
0.30
PID1.2T
KL2L 0.5L
• O metodo Ziegler-Nichols considerou a forma de identificacao curva“S”.Os valores nesta tabela foram determinados de forma empırica. Ocontrolador PID sintonizado por esse metodo fornece
Gc(s) = Kp
(
1 +1
Tis+ Tds
)
=0.6
P
(
s + 1L
)2
s, (2)
Controlador Z-N possui um polo na origem e zeros duplos em s = −1/L.20 of 33
B. A. Angelico, P. R. Scalassara, A. N. Vargas, UTFPR, Brasil

Metodo de Cohen-Coon:
Controlador Kp Ti Td
PT
KL
(
1 +0.35τ
1− τ
)
∞ 0
PI0.9T
KL
(
1 +0.92τ
1− τ
)
3.3− 3τ
1 + 1.2τ0
PID1.35T
KL
(
1 +0.18τ
1 − τ
)
2.5− 2τ
1− 0.39τL
0.37− 0.37τ
1− 0.81τL
τ = L/(L+ T ) .
21 of 33
B. A. Angelico, P. R. Scalassara, A. N. Vargas, UTFPR, Brasil
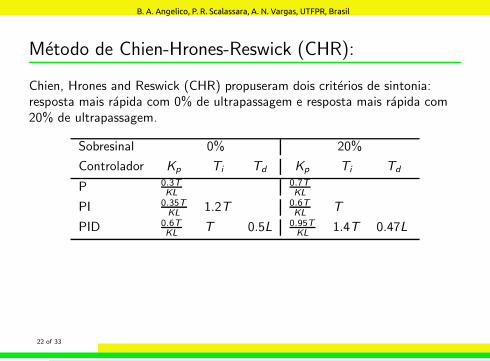
Metodo de Chien-Hrones-Reswick (CHR):
Chien, Hrones and Reswick (CHR) propuseram dois criterios de sintonia:resposta mais rapida com 0% de ultrapassagem e resposta mais rapida com20% de ultrapassagem.
Sobresinal 0% 20%
Controlador Kp Ti Td Kp Ti Td
P 0.3TKL
0.7TKL
PI 0.35TKL
1.2T 0.6TKL
T
PID 0.6TKL
T 0.5L 0.95TKL
1.4T 0.47L
22 of 33
B. A. Angelico, P. R. Scalassara, A. N. Vargas, UTFPR, Brasil
ExemploConsidere um processo a ser controlado com a seguinte funcao detransferencia
G(s) =1
(s + 0.5)(s + 1)(s + 1)(s + 2)
O sistema de controle engloba um controlador PID em serie com a planta(compensacao em serie) e realimentacao unitaria.Utilize o metodo de sintonia de Ziegler-Nichols em malha aberta para obteruma estimativa dos parametros de controlador PID.
23 of 33
B. A. Angelico, P. R. Scalassara, A. N. Vargas, UTFPR, Brasil
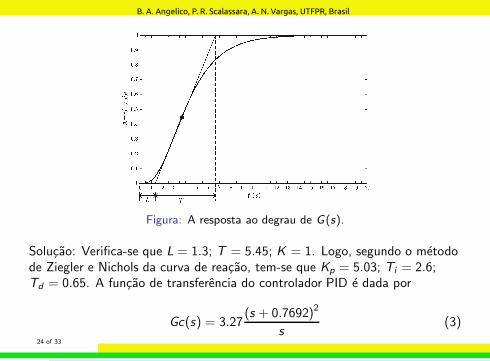
Figura: A resposta ao degrau de G(s).
Solucao: Verifica-se que L = 1.3; T = 5.45; K = 1. Logo, segundo o metodode Ziegler e Nichols da curva de reacao, tem-se que Kp = 5.03; Ti = 2.6;Td = 0.65. A funcao de transferencia do controlador PID e dada por
Gc(s) = 3.27(s + 0.7692)2
s(3)
24 of 33
B. A. Angelico, P. R. Scalassara, A. N. Vargas, UTFPR, Brasil
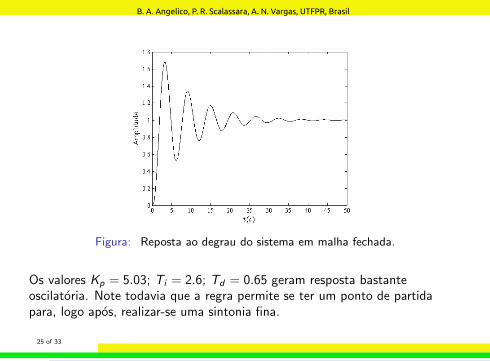
Figura: Reposta ao degrau do sistema em malha fechada.
Os valores Kp = 5.03; Ti = 2.6; Td = 0.65 geram resposta bastanteoscilatoria. Note todavia que a regra permite se ter um ponto de partidapara, logo apos, realizar-se uma sintonia fina.
25 of 33
B. A. Angelico, P. R. Scalassara, A. N. Vargas, UTFPR, Brasil
Metodos Baseados na Sensibilidade Limite
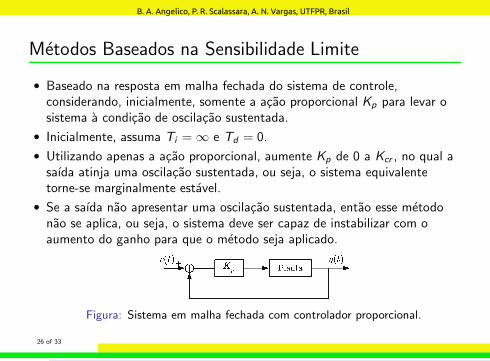
• Baseado na resposta em malha fechada do sistema de controle,considerando, inicialmente, somente a acao proporcional Kp para levar osistema a condicao de oscilacao sustentada.
• Inicialmente, assuma Ti = ∞ e Td = 0.
• Utilizando apenas a acao proporcional, aumente Kp de 0 a Kcr , no qual asaıda atinja uma oscilacao sustentada, ou seja, o sistema equivalentetorne-se marginalmente estavel.
• Se a saıda nao apresentar uma oscilacao sustentada, entao esse metodonao se aplica, ou seja, o sistema deve ser capaz de instabilizar com oaumento do ganho para que o metodo seja aplicado.
Figura: Sistema em malha fechada com controlador proporcional.
26 of 33
B. A. Angelico, P. R. Scalassara, A. N. Vargas, UTFPR, Brasil
Metodos Baseados na Sensibilidade Limite
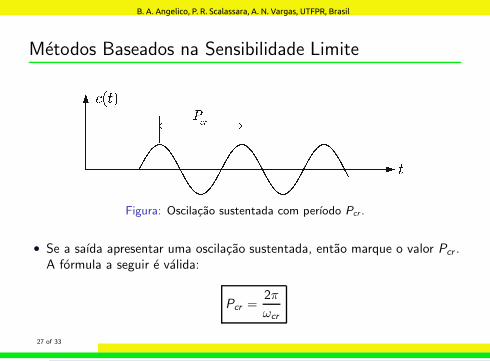
Figura: Oscilacao sustentada com perıodo Pcr .
• Se a saıda apresentar uma oscilacao sustentada, entao marque o valor Pcr .A formula a seguir e valida:
Pcr =2π
ωcr
27 of 33
B. A. Angelico, P. R. Scalassara, A. N. Vargas, UTFPR, Brasil
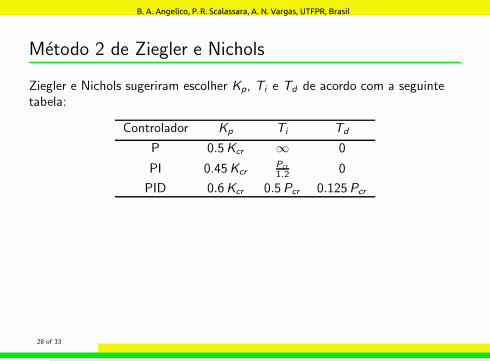
Metodo 2 de Ziegler e Nichols
Ziegler e Nichols sugeriram escolher Kp, Ti e Td de acordo com a seguintetabela:
Controlador Kp Ti Td
P 0.5Kcr ∞ 0
PI 0.45KcrPcr
1.2 0
PID 0.6Kcr 0.5Pcr 0.125Pcr
28 of 33
B. A. Angelico, P. R. Scalassara, A. N. Vargas, UTFPR, Brasil
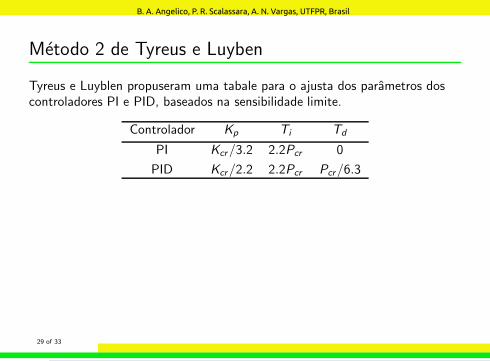
Metodo 2 de Tyreus e Luyben
Tyreus e Luyblen propuseram uma tabale para o ajusta dos parametros doscontroladores PI e PID, baseados na sensibilidade limite.
Controlador Kp Ti Td
PI Kcr/3.2 2.2Pcr 0
PID Kcr/2.2 2.2Pcr Pcr/6.3
29 of 33
B. A. Angelico, P. R. Scalassara, A. N. Vargas, UTFPR, Brasil
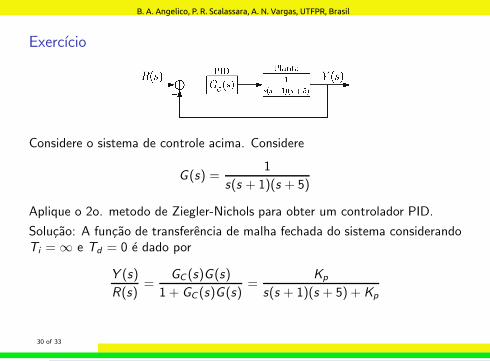
Exercıcio
Considere o sistema de controle acima. Considere
G(s) =1
s(s + 1)(s + 5)
Aplique o 2o. metodo de Ziegler-Nichols para obter um controlador PID.
Solucao: A funcao de transferencia de malha fechada do sistema considerandoTi = ∞ e Td = 0 e dado por
Y (s)
R(s)=
GC (s)G(s)
1 + GC (s)G(s)=
Kp
s(s + 1)(s + 5) + Kp
30 of 33
B. A. Angelico, P. R. Scalassara, A. N. Vargas, UTFPR, Brasil
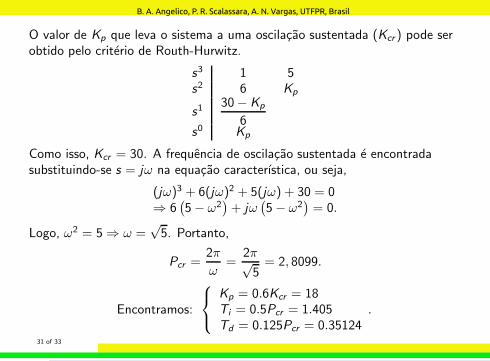
O valor de Kp que leva o sistema a uma oscilacao sustentada (Kcr ) pode serobtido pelo criterio de Routh-Hurwitz.
s3 1 5s2 6 Kp
s130− Kp
6s0 Kp
Como isso, Kcr = 30. A frequencia de oscilacao sustentada e encontradasubstituindo-se s = jω na equacao caracterıstica, ou seja,
(jω)3 + 6(jω)2 + 5(jω) + 30 = 0⇒ 6
(
5− ω2)
+ jω(
5− ω2)
= 0.
Logo, ω2 = 5 ⇒ ω =√5. Portanto,
Pcr =2π
ω=
2π√5= 2, 8099.
Encontramos:
Kp = 0.6Kcr = 18Ti = 0.5Pcr = 1.405Td = 0.125Pcr = 0.35124
.
31 of 33
B. A. Angelico, P. R. Scalassara, A. N. Vargas, UTFPR, Brasil
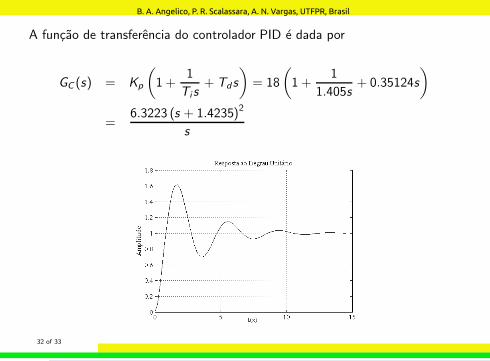
A funcao de transferencia do controlador PID e dada por
GC (s) = Kp
(
1 +1
Tis+ Tds
)
= 18
(
1 +1
1.405s+ 0.35124s
)
=6.3223 (s + 1.4235)2
s
32 of 33
B. A. Angelico, P. R. Scalassara, A. N. Vargas, UTFPR, Brasil

Dica de atividades
Dica
1. Fazer os Exercıcios apresentados no livro K. OGATA,“Engenharia deControle Moderno”.
33 of 33
B. A. Angelico, P. R. Scalassara, A. N. Vargas, UTFPR, Brasil