Embed Size (px)
Citation preview

UNIVERSIDAD NACIONAL DE INGENIER IA
FACULTAD DE CIENCIAS
TESIS
SISTEMAS LINEALES ASOCIADOS A UNA CADENA DE MARKOV EN TIEMPO DISCRETO
PARA OPTAR EL TITULO PROFESIONAL DE: LICENCIADO EN MATEMATICA
ELABORADO POR:
JORGE ENRIQUE MAYTA GUILLERMO
ASESOR:MG. WILLIAM CARLOS ECHEGARAY CASTILLO
LIMA- PERU
2016

A mis padres, hermano y Lou.
2

Agradecimientos
Agradezco a mis padres, por ser aquellas personas que siempre se preocuparon por mi
formacion academica y como persona. Estare eternamente agradecido con ellos por haber
sacrificado muchas cosas por mi bienestar. A mi madre Juana por ser aquella persona que
siempre tuvo un consejo adecuado para mejorar en mi vida personal, a mi padre Josue
por ser mi primer profesor de Matematica (siempre recordare esos veranos resolviendo los
libros de Matematica). Agradezco a Dios por darme a los mejores profesores y grandes
amigos que compartı en mi vida universitaria como: Romel Ullilen, Angel Valderrama,
Christian Benancio, Brian Valenzuela, Daniel Quino, Jhon Kid, Andres Chulluncuy,
Ronald Mas, Christian Salazar, Phamela Escudero, Muriel Estela, Jesus Cernades, David
Caytuiro, Julio Yarasca, Manuel Toribio y muchos otros amigos. Agradezco a mis amigos
de la PUCP como: Ivan Perez, Juan Mogollon, Ivan Suarez, Yimy Porras, y muchos otros
amigos. Agradezco a los profesores de la PUCP por sus sabios consejos entre ellos: Johel
Beltran, Jhonatan Farfan, Jesus Zapata tambien agradezco al profesor Julian Canari por
ser uno de los profesores que me incentivo y mejoro mi vision con respecto a la matematica.
Agradecer a mi novia, Maritza Lourdes, por ser una de las personas que siempre estuvo
apoyandome y motivandome constantemente a mejorar academica y personalmente, a su
familia en especial a: Javier, Cesar, la Sra. Maura, al Sr. Zenon, la Sra. Anita y familia;
a todos les tengo un gran carino. Un agradecimiento especial al Dr. Jorge Chavez por
los consejos, la paciencia y tiempo invertido en mi formacion. De manera analoga al
profesor William Carlos Echegaray Castillo por la orientacion y sus sabios consejos para
la culminacion del presente trabajo.
3

Indice general
1. PRELIMINARES 7
1.1. Conceptos Basicos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
1.2. El espacio vectorial Hm,nR . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
1.3. Teorıa de Probabilidad . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
1.4. Cadenas de Markov . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
2. Sistema lineal 27
2.1. Sistema Lineal . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
2.2. Estabilidad . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
3. Sistema lineal con saltos 37
3.1. Notaciones . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
3.2. Operadores . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
3.3. Matrices . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
4. Estabilidad 51
4.1. Test 1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52
4.1.1. Ejemplos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
4.2. Test 2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54
4.2.1. Ejemplos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63
4.3. Equivalencia . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64
5. CONCLUSIONES 73
Referencias . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 74
4

Resumen
En la primera parte del trabajo daremos algunos conceptos basicos del algebra lineal
y teorıa de la probabilidad que emplearemos en el trabajo. Luego se presentara la
teorıa clasica de sistemas lineales, el objetivo de este breve resumen es para motivar
la introduccion de los sistemas lineales con saltos markovianos.
La parte fundamental del trabajo es analizar la estabilidad de los sistemas lineales
asociados a una cadena de Markov, esta familia es conocida en la literatura especializada
como sistemas lineales con saltos markovianos o discrete time markov jump linear
systems(en ingles) o por sus siglas en ingles MJLS como se denota en [4]. Los sistemas
lineales gobernados por una cadena de Markov son sistemas dinamicos que presentan
cambios abruptos. Ejemplos de este tipo de sistemas los podemos encontrar en: sistemas
de control aereo, sistemas electricos, sistemas sociales, etc.
Presentamos algunas definiciones de estabilidad para el sistema MJLS, para luego
presentar dos test de estabilidad, donde uno de ellos es mediante el radio espectral de una
matriz que contiene la informacion probabilıstica de la cadena de Markov y el otro test
es mediante una ecuacion del tipo Lyapunov.
Por ultimo veremos que estos tipos de estabilidad son equivalentes siempre y cuando
el espacio de estados de la cadena de Markov es finito.

Introduccion
En muchas situaciones practicas un sistema fısico opera bajo condiciones adversas
como en el caso de un avion que vuela en medio de una tormenta alterando abruptamente
algunos de los parametros del modelo. Lo mismo puede suceder con un modelo economico
sujeto a alteraciones por el contexto exterior muchas veces incierto. Para modelar
situaciones como estas se introducen los sistemas lineales con saltos markovianos. La
cadena de Markov que gobierna el sistema muda de estado aleatoriamente a medida
que transcurre el tiempo de manera que cada estado de la cadena representa un modo
de operar distinto del sistema. Este modelo se ha venido utilizando en diversas areas de
investigacion como, por ejemplo, sistemas economicos [8], sistemas electricos [11], sistemas
roboticos [12], sistemas de control aereo [13], [14], [15], etc. Los sistemas lineales con
saltos markovianos vienen siendo estudiados desde la decada de 1970, con los trabajos de
Rosenbloom [6], Belmman [7], Bhuracha [9], Kats y Krasovskii [16], Morozan [17], Krtolica
[18], Kozin [19], Ji y Chizeck [1], O. Costa y Fragosa [20], Fang, Loparo y Feng. [21], entre
otros.
En la actualidad estos sistemas siguen siendo estudiados en las lıneas de investigacion
de Teorıa de control y analisis estocastico.
Este trabajo esta organizado de la siguiente manera:
En el capıtulo uno se estableceran los conceptos basicos que utilizaremos en todo el
trabajo, los principales conceptos y resultados de la teorıa de probabilidad y por ultimo
la teorıa basica de cadenas de Markov.
En el segundo capıtulo se presentara la teorıa clasica de sistemas lineales clasicos y la
estabilidad de esta.
En el tercer capıtulo se presentara la teorıa de sistemas lineales con saltos markovianos
y ademas ciertos operadores y matrices que nos ayudara para el analisis de la estabilidad.
En el cuarto capıtulo se presentara algunas definiciones de estabilidad para el sistema
lineal homogeneo y las cuales veremos que estos son equivalentes debido a que el espacio
de estados es finito. Por ultimo se presentaran dos test de estabilidad, uno mediante el
radio espectral de cierta matriz y el otro mediante la ecuacion del tipo Lyapunov.
6

Capıtulo 1
PRELIMINARES
1.1. Conceptos Basicos
Recordaremos algunas definiciones y resultados fundamentales de la teorıa de
operadores en espacios de Banach que seran de mucha utilidad para el desarrollo del
presente trabajo. En primer lugar denotemos el espacio euclidiano n-dimensional de los
numeros reales por Rn, el conjunto de numeros enteros no negativos, por Z+. Sean X e
Y dos espacios de Banach, donde B(X ,Y) es el espacio de todos los operadores lineales
acotados de X en Y . Por simplicidad denotamos B(X ,X ) por B(X ) . Denotaremos por
σ(T ) al espectro del operador T ∈ B(X ) y definimos el radio espectral del operador de la
forma siguiente
ρ(T ) = sup |λ|;λ ∈ σ(T )
Si X es un espacio de Hilbert entonces el producto interno lo denotamos por 〈·; ·〉, para
T ∈ B(X ) denotamos el operador adjunto de T por T T . De forma estandar denotamos
a los operadores T ∈ B(X ) semidefinidos positivos de la forma siguiente T ≥ 0, para
los definidos positivos lo denotaremos T > 0. Denotamos al conjunto de matrices de
orden m× n por Mm×n(R), es decir, si A = [aij] ∈ Mm×n(R), aij ∈ R. Por simplificidad
denotamos Mn×n(R) por Mn(R).
Denotamos a los valores propios de la matriz A ∈ Mn(R) de la manera usual
λi(A), i = 1, . . . , n y el radio espectral de A lo definimos de la forma siguiente
ρ(A) = max1≤i≤n
|λi(A)|.
7

Las normas vectoriales usuales para Rn que vamos a usar en este trabajo son las
siguientes:
Sea x ∈ Rn, x = (x1, . . . , xn)T
‖x‖1 =n∑i=1
|xi|,
‖x‖2 =
(n∑i=1
x2i
) 12
,
‖x‖max = max1≤i≤n
|xi|.
Las normas vectoriales usuales para Mn(R) que vamos a usar en este trabajo son las
siguientes:
Sea A = [aij] ∈Mn(R)
‖A‖1 =n∑
i,j=1
|aij|,
‖A‖2 = maxx6=0
‖Ax‖2
‖x‖2
.
Teorema 1.1. Sea A ∈Mn(R), se cumple la siguiente relacion
‖A‖22 = ρ(ATA).
Demostracion. Ver [22].
Teorema 1.2 (Desigualdad de Rayleigh). Sea A ∈Mn(R) una matriz simetrica, entonces
se tiene la siguiente desigualdad
λm‖x‖2 ≤ xTAx ≤ λM‖x‖2,
donde λm y λM son el menor y mayor valor propio de A, respectivamente.
Demostracion. Ver [22].
Teorema 1.3 (La formula de Gelfand). Sea A ∈Mn(R). Para cualquier norma matricial
‖ · ‖ se cumple:
ρ(A) = lımk→∞‖Ak‖
1k .
Demostracion. Ver [22].
8

Teorema 1.4 (Serie Neumann). Sea A ∈ Mn(R). Si ‖A‖ < 1 entonces la matriz I − Aes inversible y ademas
I − A =∞∑k=0
Ak.
Demostracion. Ver [22].
Teorema 1.5 (Descomposicion de Cholesky). Si A ∈ Mn(R) una matriz simetrica y
definida positiva entonces existe una matriz no singular S tal que A = SST .
Demostracion. Ver [22].
Teorema 1.6 (Desigualdad de Jensen). Sea ϕ una funcion convexa, entonces se tiene
ϕ(E(X)) ≤ E(ϕ(X)),
donde X es una variable aleatoria y E es la esperanza.
Demostracion. Ver [3].
Lema 1.1. Sea A ∈Mn(R) una matriz simetrica. Si para todo x ∈ Rn se tiene xTAx = 0
entonces A = 0.
Demostracion. Tomando x = ei esto implica que eTi Aei = aii = 0 para todo i = 1, . . . , n
y por ultimo tomando x = ei + ej se sigue
(ei + ej)TA(ei + ej) = eTi Aei + eTj Aej + eTi Aej + eTj Aei
= eTi Aej + eTj Aei
= 0
y como A es simetrica esto implica que eTi Aej = eTj Aei reemplazando se obtiene que
eTi Aej = aij = 0 para todo i,j = 1, . . . , n; i 6= j lo que concluye que A = 0.
Lema 1.2. Sean A ∈ Mm×n(R) y B ∈ Mn×m(R). Las matrices AB y BA tienen los
mismo valores propios no nulos. Ademas ρ(AB) = ρ(BA).
Demostracion. Sea λ un valor propio no nulo de AB con su respectivo v vector propio,
es decir, ABv = λv.
9

Tenemos que Bv es un vector no nulo esto implica que Bv es un vector propio de la
matriz BA. En efecto
BA(Bv) = B(ABv)
= B(λv)
= λBv,
entonces AB y BA tienen los mismo valores propios no nulos, es decir, ρ(AB) =
ρ(BA).
Definicion 1. La transformacion traza tr :Mn(R)→ R es una funcional lineal definida
de la forma siguiente:
tr(A) =n∑i=1
aii.
Resaltaremos algunas de las propiedades importantes de la transformacion traza.
Proposicion 1.1. La transformacion traza cumple las siguientes propiedades
1. Para todo A ∈Mn(R), se cumple tr(A) = tr(AT ).
2. Para todo A, B ∈Mn(R), se cumple tr(AB) = tr(BA).
3. Para todo A ∈Mn(R), se cumple tr(A) =n∑i=1
λi(A).
4. Sean A ≥ 0 y B > 0, donde A,B ∈Mn(R)(mın
i=1,...,nλi(B)
)tr(A) ≤ tr(AB) ≤
(maxi=1,...,n
λi(B)
)tr(A).
5. Sea A ∈Mm×n(R), si tr(ATA) = 0 entonces A = 0.
Demostracion. La prueba esta desarrollada de la forma siguiente.
1. Como la diagonal principal de la matriz A no se ve afectada al transponer se tiene
que tr(A) = tr(AT ).
10

2. De la definicion de la traza de AB se sigue
tr(AB) =n∑i=1
n∑k=1
aikbki
=n∑k=1
n∑i=1
aikbki
= tr(BA).
3. Aplicando la descomposicion de Jordan para A se tiene
tr(A) = tr(P−1JAP )
= tr(JA)
=n∑i=1
λi(A).
4. Aplicando la descomposicion de Jordan para A y B se tiene
tr(AB) = tr(P−1JAPQ−1JBQ)
= tr(JAJB)
=n∑i=1
λi(A)λi(B)
(mın
i=1,...,nλi(B)
) n∑i=1
λi(A) ≤ tr(AB) ≤(
maxi=1,...,n
λi(B)
) n∑i=1
λi(A)
(mın
i=1,...,nλi(B)
)tr(A) ≤ tr(AB) ≤
(maxi=1,...,n
λi(B)
)tr(A)
4. Sea A ∈Mm×n(R) se sigue
ATA =
a11 . . . am1
.... . .
...
a1n . . . amn
a11 . . . a1n
.... . .
...
am1 . . . amn
=
m∑i=1
a2i1 . . . ?
.... . .
...
? . . .
m∑i=1
a2in
Debido a que tr(ATA) = 0 entonces A = 0.
11

La norma siguiente va ser utilizada en la proposicion 1.2.
Lema 1.3. Sea H ∈ Mn(R) una matriz simetrica y definida positiva. Sea la funcion
‖ · ‖H : Rn → [0,+∞[ definida por
‖x‖H =√xTHx.
Entonces esta funcion es una norma.
Demostracion. Comprobaremos que ‖ · ‖H es una norma, debido que H > 0 por la
descomposicion de Cholesky se tiene H = S−TS−1, donde S es una matriz no singular.
Luego
‖x‖2H = xTHx = xTS−TS−1x = ‖S−1x‖2
2
esto implica que ‖x‖H = ‖S−1x‖2
a) Para todo x 6= 0, ‖x‖H =√xTHx > 0.
b) Para todo x ∈ Rn y β ∈ R, ‖βx‖H =√β2xTHx = |β|
√xTHx = |β|‖x‖H .
c) Para todo x, y ∈ Rn
‖x+ y‖H = ‖S−1(x+ y)‖2
≤ ‖S−1x‖2 + ‖S−1y‖2
= ‖x‖H + ‖y‖H
Proposicion 1.2. Sea una matriz A ∈ Mn(R), las afirmaciones siguientes son
equivalentes:
a) La sucesion (Ak)k∈N converge a cero, es decir, lımk→∞
Ak = 0.
b) El radio espectral de A es menor que uno, es decir, ρ(A) < 1.
c) Existe una matriz simetrica, H > 0 tal que ATHA < H.
d) Existe una matriz no singular S tal que ‖S−1AS‖2 < 1.
e) Existe una norma ‖ · ‖∗ tal que ‖A‖∗ < 1.
12

Demostracion.
a)→ b) Sea λ ∈ σ(A) y v 6= 0 el vector propio asociado correspondiente. Se tiene
lımk→∞
Akv = lımk→∞
λkv = 0 y esto implica |λ| < 1.
b)→ c) Como
ρ(A) = lımk→∞‖Ak‖
1k ,
donde es conocida en la literatura como ”la formula de Gelfand”, aplicandola para
A y AT se tiene que existe γ ∈ R tal que 0 < ρ(A) = ρ(AT ) < γ < 1 lo cual implica
‖Ak‖2 < γk, ‖(AT )k‖2 < γk.
Donde la siguiente serie es convergente
H =∞∑k=0
(AT )kAk.
En efecto ∥∥∥∥∥n∑k=0
(AT )kAk
∥∥∥∥∥2
≤n∑k=0
‖(AT )kAk‖2 ≤n∑k=0
γ2k
la serien∑k=0
γ2k es convergente entonces por el criterio de la comparacion se tiene
que la serien∑k=0
(AT )kAk es convergente esto implica que existe la matriz H.
Donde H es simetrica, dado que
HT =∞∑k=0
(AT )kAk = H
ademas es una matriz definida positiva, en efecto
∀x 6= 0, xTHx =∞∑k=0
xT (AT )kAkx =∞∑k=0
‖Akx‖2 > 0
por ultimo obtenemos
H − ATHA =∞∑k=0
(AT )kAk −∞∑k=1
(AT )kAk = In > 0
.
13

c)→ d) Se tiene que H > 0 entonces existe una matriz no singular tal que H−1 = SST .
Entonces
‖S−1AS‖22 = ρ
((S−1AS)TS−1AS
)= ρ
(STATS−TS−1AS
)= ρ
(STATHAS
)(1.1)
De la desigualdad ATHA < H se tiene
∀z 6= 0, zT(H − ATHA
)z > 0
tomando z = Sx tenemos
zT(H − ATHA
)z = xT
(STHS − STATHAS
)x
= xT(In − STATHAS
)x
entonces
∀x 6= 0, xT(In − STATHAS
)x > 0
tomando x = v donde v es un vector propio de la matriz STATHAS y λ su respectivo
valor propio.
vT(In − STATHAS
)v = vT Inv − λvTv
= ‖v‖22 − λ‖v‖2
2
= ‖v‖22(1− λ)
> 0.
entonces λ < 1 y de (1.1) se concluye.
d)→ e) Existe una matriz no singular S tal que ‖S−1AS‖2 < 1. Sea H = S−TS−1 > 0 y
consideremos la norma definida en el lema 1.3.
‖x‖2H = xTHx = xTS−TS−1x = ‖S−1x‖2
2
Con base en la norma vectorial “H”, podemos definir una norma inducida sobre el
espacio de matrices, como sigue:
‖A‖∗ = sup‖x‖H=1
‖Ax‖H
14

Note que
‖A‖∗ = sup‖S−1x‖2=1
‖S−1Ax‖2
= sup‖S−1x‖2=1
‖S−1ASS−1x‖2
≤ sup‖S−1x‖2=1
‖S−1AS‖2‖S−1x‖2
= ‖S−1AS‖2
Por lo tanto ‖A‖∗ ≤ ‖S−1AS‖2 < 1.
e)→ a) Podemos encontrar un γ tal que ‖A‖∗ < γ < 1, ademas se tiene que
0 ≤ ‖Ak‖∗ ≤ ‖A‖k∗ < γk < 1
esto implica que lımk→∞
Ak = 0
Nuestro analisis se va concentrar en espacios de dimension finita donde las normas son
equivalentes, es decir, sea dos normas ‖ · ‖α, ‖ · ‖β en un espacio de Banach X si existen
c1 > 0, c2 > 0 tal que:
∀x ∈ X , ‖x‖α ≤ c2‖x‖β, ‖x‖β ≤ c1‖x‖α
Definicion 2. Sean A ∈Mn×p(R), B ∈Mm×q(R). La matriz de orden mn× pq
A⊗B =
a11B . . . a1pB
.... . .
...
an1B . . . anpB
.
es llamada producto Kronecker de A en B.
Algunas propiedades basicas y de mucha utilidad se presenta a continuacion :
Proposicion 1.3. El productor Kronecker cumple las siguientes propiedades
1. Para todo A ∈Mm×n(R), B ∈Mp×q(R), se cumple
(A⊗B)T = AT ⊗BT
15

2. Para todo A ∈Mn(R), se cumple
σ(A⊗ A) = λiλj | λi, λj ∈ σ(A)
3. Para todo A ∈Mn(R), se cumple
ρ(A⊗ A) = ρ(A)2
4. Para todo A ∈Mm×n(R), B ∈Mp×q(R), C ∈Mn×s(R), D ∈Mq×r(R), se cumple
(A⊗B)(C ⊗D) = (AC)⊗ (BD)
Demostracion. La prueba esta desarrollada de la forma siguiente.
1. De la definicion del producto Kronecker se sigue
(A⊗B)T =
a11B . . . a1pB
.... . .
...
an1B . . . anpB
T
=
a11B
T . . . an1BT
.... . .
...
a1pBT . . . anpB
T
= AT ⊗BT
2. Sean vi y vj autovectores de A, λi y λj sus respectivos autovalores.
(A⊗ A)vec(vivTj ) = vec(Aviv
Tj A
T )
= vec(Avi(Avj)T )
= vec(λiviλjvTj )
= λiλjvec(vivTj ).
3. Consecuencia directa del item 2.
16

4. De la definicion del producto Kronecker se sigue
(A⊗B)(C ⊗D) =
a11B . . . a1nB
.... . .
...
am1B . . . amnB
c11D . . . c1sD
.... . .
...
cn1D . . . cnsD
=
n∑k=1
a1kck1BD . . .
n∑k=1
a1kckpBD
.... . .
...n∑k=1
amkck1BD . . .n∑k=1
amkckpBD
= (AC)⊗ (BD)
Definicion 3. El operador vec es una transformacion lineal que convierte la matriz
A ∈Mm×n(R) en un vector columna, se define de la forma siguiente:
vec(A) =(a11 . . . am1 a12 . . . am2 . . . a1n . . . amn
)T.
Proposicion 1.4. El operador vec cumple las siguientes propiedades
1. Para todo A, B ∈Mm×n(R), se cumple
vec(A+B) = vec(A) + vec(B)
2. Para todo A ∈Mm×n(R), α ∈ R, se cumple
vec(αA) = α vec(A)
3. Para todo A, B, C ∈Mn(R), se cumple
vec(ABC) = (CT ⊗ A)vec(B) (1.2)
Demostracion. La prueba esta desarrollada de la forma siguiente.
1. De la definicion del operador vec se sigue
vec(A+B) =(a11 + b11 . . . amn + bmn
)T=(a11 . . . amn
)T+(b11 . . . bmn
)T= vec(A) + vec(B)
17

2. De la definicion del operador vec se sigue
vec(αA) =(αa11 . . . αamn
)T= α
(a11 . . . amn
)T= αvec(A)
3. Sean b1, . . . , bn las columnas de B, entonces B se puede expresar de la forma siguiente
B =n∑i=1
bieTi ,
donde ei son elementos de la base canonica de Rn.
vec(ABC) = vec
(A
(n∑i=1
bieTi
)C
)
=n∑i=1
vec(A(bie
Ti
)C)
=n∑i=1
vec(Abi
(eTi C
))=
n∑i=1
vec(Abi
(CT ei
)T)=
n∑i=1
(CT ei
)⊗ (Abi)
=(CT ⊗ A
) n∑i=1
(ei ⊗ bi)
=(CT ⊗ A
) n∑i=1
vec(bieTi )
=(CT ⊗ A
)vec
(n∑i=1
bieTi
)=(CT ⊗ A
)vec(B)
Lema 1.4. La trasformacion vec : Mm×n(R) → Rmn es continua y biyectiva. Ademas
su inversa es continua.
18

Demostracion. En primer lugar probaremos la continuidad.
Sea una sucesion (Ak) = (akij) convergente tal que lımk→∞
Ak = A entonces lımk→∞
akij = aij.
Por otro lado
vec(Ak) =
ak11
...
akm1
ak12
...
akm2
...
ak1n...
akmn
,
esto implica lımk→∞
vec(Ak) = vec(A). Ahora probaremos que es inyectiva, en efecto
vec(A) = vec(B)→ aij = bij
y como A,B ∈Mm×n(R) entonces A = B.
La sobreyectividad y que su inversa es continua, la prueba es trivial.
1.2. El espacio vectorial Hm,nR
A continuacion definimos el conjunto que tiene como elementos vectores de N
componentes donde cada componente es una matriz de orden m × n. Se denotara por
Hm,nR .
Hm,nR = V | V = (V1, . . . , VN), Vi ∈Mm×n(R), i ∈ 1, . . . , N.
Por simplicidad denotamos Hn,nR por Hn
R .
Lema 1.5. El conjunto Hm,nR sujeto con las operaciones siguientes es un espacio vectorial
de dimension finita.
Para todo U, V ∈ Hm,nR , U + V = (U1 + V1, . . . , UN + VN)
Para todo U ∈ Hm,nR , β ∈ R, β.U = (βU1, . . . , βUN)
19

Demostracion. La demostracion del lema 1.5 se basa en la prueba que Rn es un espacio
vectorial de dimension finita.
Lema 1.6. El espacio vectorial Hm,nR es un espacio vectorial normado, con las siguientes
normas. Sea V = (V1, . . . , VN) ∈ Hm,nR , se define las siguiente normas equivalentes
‖V ‖1 =N∑i=1
‖Vi‖1
‖V ‖2 =
(N∑i=1
tr(V Ti Vi)
) 12
‖V ‖max = max1≤i≤N
‖Vi‖2
Demostracion. La demostracion del lema 1.6 se basa en la prueba que Rn es un espacio
vectorial normado con las normas usuales.
Lema 1.7. El espacio vectorial (‖.‖,Hm,nR ) es un espacio de Banach, es decir, es un espacio
vectorial normado completo.
Demostracion. Sea (Vk)k∈N ⊂ Hm,nR una sucesion de cauchy donde Vk = (V k
1 , . . . , VkN), es
decir, para todo ε > 0, existe J ∈ N tal que J < k,s con ‖Vk − Vs‖max < ε esto implica
‖V kj − V s
j ‖2 ≤ max1≤i≤N
‖V ki − V s
i ‖2 = ‖Vk − Vs‖max < ε
Debido que Mm×n(R) es completo entonces lımk→∞
V kj = Vj ∈ Mm×n(R) esto implica que
la sucesion (Vk)k∈N es convergente.
Lema 1.8. El espacio (‖.‖2,Hm,nR ) es un espacio de Hilbert donde el producto interno
inducido por la norma ‖.‖2 esta dado por:
〈V ;S〉 =N∑i=1
tr(V Ti Si)
Demostracion. Notamos que 〈V ;V 〉 =N∑i=1
tr(V Ti Vi) = ‖V ‖2
2. Solo basta verificar que es
un productor interno. En efecto:
20

1) Linealidad
〈V ;αS + βW 〉 =N∑i=1
tr(V Ti (αSi + βWi))
= αN∑i=1
tr(V Ti Si) + β
N∑i=1
tr(V Ti Wi)
= α〈V ;S〉+ β〈V ;W 〉
2) Hermiticidad
〈V ;S〉 =N∑i=1
tr(V Ti Si)
=N∑i=1
tr(STi Vi)
= 〈S;V 〉
3) Definida positiva. Notamos la matriz V Ti Vi es simetrica y semidefinida positiva
entonces los autovalores son mayores o iguales a cero. Esto implica
〈V ;V 〉 =N∑i=1
tr(V Ti Vi) ≥ 0
Ademas si
〈V ;V 〉 =N∑i=1
tr(V Ti Vi) = 0,
esto implica que tr(V Ti Vi) = 0 y por el item 5 de la proposicion 1.1 se concluye
Vi = 0 entonces V = 0. Lo recıproco, es decir, V = 0 esto implica de forma directa
que 〈V ;V 〉 = 0.
Sea V = (V1, . . . , VN) ∈ Hm,nR , se define V T = (V T
1 , . . . , VTN ) ∈ Hn,m
R .
Se dice que V ∈ HnR es simetrica, si V = V T .
Tambien es conveniente definir las norma inducidas de los operadores T ∈ B(HnR) con
respecto a las normas anteriores
‖T ‖1 = sup‖V ‖1 6=0
‖T (V )‖1
‖V ‖1
21

‖T ‖2 = sup‖V ‖2 6=0
‖T (V )‖2
‖V ‖2
Definimos los conjuntos siguientes
HnTR =
V ∈ Hn
R;Vi = V Ti , i ∈ 1, . . . , N
Hn+
R =V ∈ HnT
R ;Vi ≥ 0, i ∈ 1, . . . , N
Ademas, se denota V ≥ S si V − S = (V1 − S1, . . . , VN − SN) ∈ Hn+R y V > S si
Vi − Si > 0.
Definicion 4. El operador supvec es una transformacion lineal que convierte un elemento
V ∈ Hm,nR en un vector columna. Se define de la forma siguiente:
supvec(V ) =
vec(V1)
...
vec(VN)
.
Lema 1.9. La trasformacion supvec : Hm,nR (R)→ RNmn es continua y biyectiva. Ademas
su inversa es continua.
Demostracion. La demostracion del lema 1.9 se basa en que la trasformacion vec es
continua y biyectiva.
1.3. Teorıa de Probabilidad
Definicion 5. Un espacio de probabilidad (Ω,F , P ) es un espacio de medida tal que
P (Ω) = 1. En este caso, se dira que P es una medida de probabilidad y a los elementos
de F se les llamaran eventos.
Definicion 6. Para cada conjunto A ∈ F la funcion indicadora 1A es definida de la
siguiente manera, para cada w ∈ Ω
1A(ω) =
1 , ω ∈ A0 , ω 6∈ A
22

Definicion 7. Sean A,B ∈ F , donde B es un evento con probabilidad positiva. Se define
la probabilidad condicional de A dado B por
P (A|B) =P (A ∩B)
P (B)
Definicion 8. Una variable aleatoria real X es una funcion medible X : Ω → R, y la
esperanza de X se define como
E(X) =
∫Ω
XdP
Definicion 9. Dado G un σ − subalgebra de F , y X una variable aleatoria, se define la
esperanza condicional de X dado G, denotado por E(X|G), como una variable aleatoria
que cumple lo siguiente:
i) E(X|G) es G-medible
ii) Para todo A ∈ G:∫AXdP =
∫AE(X|G)dP
Cuando G = σ〈Y 〉, el σ-algebra generado por la variable Y , E(X|G) se reduce a E(X|Y )
La esperanza condicional es una herramienta fundemental en nuestra teorıa por tal
motivo mencionaremos algunas propiedades de esta.
Observe que si A ∈ F y P (A) > 0 entonces :
E(X|A) =∑xk∈RX
xkP (X = xk|A) =∑xk∈RX
xkP (X = xk, A)
P (A)=E(X1A)
P (A)
Proposicion 1.5. Sean a y b dos constantes , g una funcion medible de valor real y X ,
Y y Z son variables aleatorias. Entonces
1) E(aX + bY |Z) = aE(X|Z) + bE(Y |Z).
2) E(X|Y ) ≥ 0 , si X ≥ 0.
3) E(Xg(Y )|Y ) = g(Y )E(X|Y ).
4) E(E(X|Y,Z)|Y ) = E(X|Y ).
5) E(E(X|Y )) = E(X).
Demostracion. La prueba esta desarrollada de la forma siguiente.
23

1) Partiendo de la definicion de esperanza condicional
E(aX + bY |Z = z) =E((aX + bY )1Z=z)
P (Z = z)
= aE(X1Z=z)
P (Z = z)+ b
E(Y 1Z=z)
P (Z = z)
= aE(X|Z = z) + bE(Y |Z = z).
2) Partiendo de la definicion de esperanza condicional
E(X|Y = y) =E(X1Y=y)
P (Y = y)
≥ 0.
3) Partiendo de la definicion de esperanza condicional
E(Xg(Y )|Y = y) =E(Xg(Y )1Y=y)
P (Y = y)
=E(Xg(y)1Y=y)
P (Y = y)
= g(y)E(X1Y=y)
P (Y = y)
= g(y)E(X|Y = y).
4) Partiendo de la definicion de esperanza condicional
E(X|Y = y, Z = z) =∑x∈RX
xP (X = x, Y = y, Z = z)
P (Y = y, Z = z),
24

por otro lado
E(E(X|Y,Z)|Y = y) =∑z∈RZ
E(X|Y = y, Z = z)P (Y = y, Z = z)
P (Y = y)
=∑z∈RZ
(∑x∈RX
xP (X = x, Y = y, Z = z)
P (Y = y, Z = z)
)P (Y = y, Z = z)
P (Y = y)
=∑z∈RZ
(∑x∈RX
xP (X = x, Y = y, Z = z)
P (Y = y)
)
=∑x∈RX
x
(∑z∈RZ
P (X = x, Y = y, Z = z)
)P (Y = y)
=∑x∈RX
xP (X = x, Y = y)
P (Y = y)
= E(X|Y = y).
5) Partiendo de la definicion de esperanza condicional
E(E(X|Y )) =∑y∈RY
E(X|Y = y)P (Y = y)
=∑y∈RY
(∑x∈RX
xP (X = x, Y = y)
P (Y = y)
)P (Y = y)
=∑x∈RX
xP (X = x)
= E(X).
1.4. Cadenas de Markov
Una cadena de Markov es un proceso estocastico que satisface la propiedad
Markoviana, es decir, si se conoce la historia del proceso hasta el instante actual, su
estado presente resume toda la informacion relevante para describir, en probabilidad, su
estado futuro.
En este capıtulo presentamos los aspectos teoricos basicos sobre cadenas de Markov
en tiempo discreto que son necesarios conocer para el desarrollo de nuestro trabajo.
25

En este caso asumimos que el proceso toma valores en un conjunto finito Sθ llamado
espacio de estados:
Sθ = 1, 2, . . . , N,N ∈ N
Caso Discreto
Sea θ(k) una cadena de Markov en tiempo discreto con una matriz de transicion de
probabilidad Π(k) = [pij(k)] ∈ MN(R), donde pij(k) es la probabilidad de transicion del
estado i al estado j en el instante k, esto es,
pij(k) = P (θ(k + 1) = j|θ(k) = i), i,j ∈ Sθ,
donde pij(k) ≥ 0 yN∑j=1
pij(k) = 1 . La distribucion de probabilidad de θ(0), llamada
distribucion inicial, la denotamos por π = (π1, . . . , πN), donde πi = P (θ(0) = i).
Observe queN∑i=1
πi = 1.
El vector de distribucion de probabilidad en el instante k de la cadena de Markov se define
por
π(k) = (π1(k), . . . , πN(k))
donde
πi(k) = P (θ(k) = i) yN∑i=1
πi(k) = 1.
Denotaremos la matriz Πn como aquella matriz que tiene entradas como probabilidad
de transicion del estado i al estado j en n pasos, esto es, Π(k)n = [p(n)ij (k)], donde
p(n)ij (k) = P (θ(n) = j|θ(0) = i), i,j ∈ Sθ.
En nuestro trabajo consideraremos que la cadena de Markov es homogenea, es decir,
las probabilidades de transicion no depende de k, por lo que pij(k) = pij.∀k ∈ Z+.
De la homogeneidad se sigue que
π(k) = πΠk,
lo que siginifica que dados la distribucion inicial y la matriz de transicion de probabilidad
el proceso queda completamente determinado, en terminos probabilısticos.
26

Capıtulo 2
Sistemas Lineales en tiempo discreto
En este capıtulo se revisan brevemente algunos aspectos basicos de la teorıa de los
sistemas dinamicos de control clasicos, es decir, de aquellos sistemas lineales de control
que no estan sujetos a saltos. Nuestro objetivo es que este breve resumen sirva para
motivar la introduccion de los sistemas lineales con saltos markovianos.
2.1. Sistema Lineal
Muchos fenomenos dinamicos de la fısica, la biologıa, la ingenierıa, la economıa, etc,
pueden ser modelados bajo la forma del sistema dinamico en tiempo discreto
x(k + 1) = Ax(k)
x(0) = x0 ∈ Rn,(2.1)
donde A ∈ Mn(R) es la matriz que almacena los parametros del modelo. Para cada
k ∈ Z+, x(k) ∈ Rn es el vector de estado. El modelo (2.1) configura lo que en la literatura
se conoce como sistema (clasico) de control lineal. El vector x0 = x(k0) denota este estado
y es llamado estado inicial del sistema, donde k0 es el momento inicial. Por la linealidad
del modelo, usualmente se considera k0 = 0, por lo que se escribe x(0) = x0 = x(k0).
Definicion 10. Una sucesion z(k)k∈Z+ ⊂ Rn es solucion de (2.1) si satisface z(k + 1) = Az(k)
z(0) = x0 ∈ Rn
27

Observacion 2.1. Para cada estado inicial x0 la solucion de (2.1) esta dada por
x(k) = Akx0. (2.2)
A x(k) se le llama tambien la trayectoria del sistema. Cuando se quiere especificar el
estado inicial, la trayectoria suele escribirse como x(k;x0). Observe que la trayectoria
(2.2) depende claramente del estado inicial del sistema. Esta parte es conocida como la
parte no forzada que es enteramente debida a las condiciones iniciales del fenomeno.
Ejemplo 1. Sea el sistema x(k + 1) = 2x(k) + y(k)
y(k + 1) = 2y(k)
x(0) = 0, y(0) = 1
Haciendo el cambio de variable z(k) = [x(k) y(k)]T entonces el sistema se puede
reescribir de la forma siguiente z(k + 1) = Az(k)
z(0) = [0 1]T
donde A =
2 1
0 2
entonces Ak =
2k k2k−1
0 2k
y de (2.2) se obtiene
x(k) = k2k−1, y(k) = 2k
2.2. Estabilidad
La estabilidad es un requerimiento fundamental en el diseno de todo sistema. Un
sistema no estable puede salirse de control, alterarse y perder sus caracterısticas esenciales,
o simplemente no ser de utilidad practica. En esta seccion se define y estudia el concepto
de estabilidad para sistemas lineales clasicos. Las nociones de estabilidad mas conocidas
que pueden ser relacionadas al sistema (2.1) son la BIBO estabilidad y la estabilidad de
Lyapunov.
La BIBO estabilidad esta relacionada al sistema siguiente x(k + 1) = Ax(k) +Bu(k)
y(k) = Cx(k)
28

donde B ∈ Mn×p(R), C ∈ M1×n(R), u(k) ∈ Rp es la variable de control o tambien
llamada senal de entrada, e y(k) ∈ R se conoce como la senal de salida. Si lo que se desea
es estudiar la relacion entre la senal de entrada y la senal de salida, entonces la BIBO
estabilidad es la nocion adecuada. BIBO son las siglas en ingles de la expresion bounded
input bounded output, es decir, el interes es ver si la respuesta del sistema sera acotada
cuando se aplique una senal de entrada acotada. Si el sistema siempre responde de esta
manera, el sera BIBO estable. En este caso la parte no forzada de la trayectoria no juega
ningun rol en el analisis de la estabilidad.
Por otro lado, si solo es de interes la estructura interna del sistema, esto es, si no
se considera la senal de entrada, es decir u(k) = 0 como en el sistema (2.1) entonces la
nocion apropiada de estabilidad es la de Lyapunov. Se dice que la trayectoria x(k;x0) es
estable o marginalmente estable (en el sentido de Lyapunov) si cualquier otra trayectoria
que partiendo suficientemente cerca de esta permanecera por siempre cerca de ella.
Formalmente se tiene
∀ ε > 0 ∃ δ > 0/∥∥∥x′0 − x0
∥∥∥ < δ ⇒∥∥∥x(k;x
′
0)− x(k;x0)∥∥∥ < ε, k > k0 ∈ Z+.
La trayectoria x(k) puede ser entendida como un modo de operar del sistema. Suelen
ser de interes los modos de operacion en equilibrio.
Definicion 11. Se dice que xe ∈ Rn es punto de equilibrio para el sistema (2.1) si
Axe = xe.
Observacion 2.2. Notamos lo siguiente
Axe = xe → (I − A)xe = 0
Si la matriz I − A es no singular entonces se tiene un unico punto de equilibrio
xe = 0. Caso contrario tiene infinitos puntos de equilibrio un caso particular xe = 0. En
general xe 6= 0, pero en este caso, por medio de un cambio de variable, este punto puede
transformarse en un punto nulo, por lo que solo xe = 0 es considerado en el analisis. Un
punto de equilibrio no solo puede mostrar estabilidad, sino tambien un comportamiento
atractor, es decir, las trayectorias que parten cerca del equilibrio no solo permaneceran
por siempre cerca de el, como se requiere en la estabilidad marginal, sino ademas el
acercamiento es asintotico.
29

De ahora en adelante cuando se mencione que el sistema es estable o asintoticamente
estable estaremos haciendo referencia a que el sistema es estable o asintoticamente estable
en el punto de equilibrio xe = 0. A continuacion definimos la estabilidad del punto de
equilibrio xe = 0.
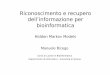
Definicion 12. Consideremos el sistema (2.1)
a) El punto de equilibrio xe = 0 es estable si
∀ε > 0 ∃ δ > 0/ ‖x(0)‖ < δ ⇒ ‖x(k)‖ < ε, k > k0 ∈ Z+.
b) El punto de equilibrio xe = 0 es asintoticamente estable si es estable y ademas
∃ η > 0 / ‖x(0)‖ < η ⇒ lımk→∞
x(k) = 0.
La figura siguiente muestra estos conceptos.
El teorema 2.1 caracteriza la estabilidad asintotica de Lyapunov mediante el radio
espectral de la matriz A.
Teorema 2.1 ([10]). Consideremos el sistema (2.1). Si el punto de equilibrio xe = 0 es
asintoticamente estable si y solo si ρ(A) < 1.
Demostracion. Asumamos que el sistema (2.1) es asintoticamente estable, por (2.2) se
tiene
lımk→∞
Akx(0) = 0,∀x(0) ∈ Rn
30

por la proposicion 1.2 implica que ρ(A) < 1.
Ahora supongamos que ρ(A) < 1 por la proposicion 1.2 existe una norma tal que
‖A‖? < 1, de (2.2) se sigue
0 ≤ ‖x(k)‖H = ‖Akx(0)‖H ≤ ‖A‖k?‖x(0)‖H
entonces lımk→∞
x(k) = 0.
El siguiente ejemplo muestra un sistema que no es estable ni asıntoticamente estable.
Ejemplo 2. Sean
A =
1 1
0 1
, x(0) =
1
1
Se tiene que ρ(A) = 1 y calculando la trayectoria solucion del sistema (2.1) se obtiene
x(1) =
2
1
, x(2) =
3
1
, . . . , x(k) =
k + 1
1
Notamos que la solucion no es acotada, esto implica que no es estable ni asintoticamente
estable.
El siguiente ejemplo muestra un sistema es estable pero no asinstoticamente estable.
Ejemplo 3. Sean
A =
0 1
−1 0
, x(0) =
1
1
Se tiene que ρ(A) = 1 y calculando la trayectoria solucion del sistema (2.1) se obtiene
x(1) =
1
−1
, x(2) =
−1
−1
, x(3) =
−1
1
, x(4) =
1
1
Notamos que la solucion es acotada esto implica que es estable pero no es
asintoticamente estable.
El siguiente ejemplo muestra un sistema asintoticamente estable y por ende estable.
Ejemplo 4. Sean
A =
0.5 0.3
0 0.25
, x(0) =
0
1
31

Se tiene que ρ(A) < 1 y calculando la trayectoria solucion del sistema (2.1) se obtiene
x(k) =
12k
14k
Notamos que la solucion es convergente, esto implica que el sistema es asintoticamente
estable.
El teorema 2.2 proporciona una caracterizacion algebraica de la estabilidad asintotica.
Teorema 2.2 ([10]). El sistema (2.1) es asintoticamente estable si y solo si para toda
matriz simetrica definida positiva W , existe una unica matriz simetrica definida positiva
M tal que
M − ATMA = W. (2.3)
La ecuacion (2.3) es conocida como ecuacion de Lyapunov.
Demostracion. Asumamos que se cumple la ecuacion (2.3). Sea λ un autovalor de A con
su respectivo autovector v 6= 0 entonces
vTWv = vT (M − ATMA)v
= vTMv − vTATMAv
= vTMv − (Av)TMAv
= vTMv − (λv)TMλv
= vTMv(1− λ2).
Sabemos que M y W son matrices simetricas y definidas positivas , es decir, vTWv > 0
y vTMv > 0. Luego 1 − λ2 > 0 entonces |λ| < 1. Por lo tanto ρ(A) < 1 por el teorema
2.1 se tiene que el sistema (2.1) es asintoticamente estable.
Asumamos que el sistema (2.1) es asintoticamente estable, por el teorema 2.1 se tiene
ρ(A) < 1. Sea W > 0 entonces definimos la siguiente matriz
M =∞∑k=0
(AT )kWAk. (2.4)
En primer lugar garantizemos la existencia de la matriz M esto implica asegurar que
la serie es convergente.
En efecto, como ρ(A) < 1 por la proposicion 1.2 existe una norma tal que ‖A‖? < 1.
32

∥∥∥∥∥n∑k=0
(AT )kWAk
∥∥∥∥∥?
≤n∑k=0
∥∥AT∥∥k?‖W‖? ‖A‖
k? .
Debido que ‖A‖? < 1 entonces la serien∑k=0
∥∥AT∥∥k?‖W‖? ‖A‖
k? es convergente por el
criterio de comparacion implica que la serien∑k=0
(AT )kWAk es convergente.
Ahora probaremos que M es simetrica. En efecto
MT =
(∞∑k=0
(AT )kWAk
)T
=∞∑k=0
(AT )kW TAk
=∞∑k=0
(AT )kWAk
= M
Ahora probaremos que M > 0, sea x 6= 0
xTMx = xT
(∞∑k=0
(AT )kWAk
)x
= lımn→∞
(n∑k=0
xT (Ak)TWAkx
)
= lımn→∞
(n∑k=0
(Akx)TWAkx
)
= lımn→∞
(xTWx+
n∑k=1
(Akx)TWAkx
)> 0
Ahora comprobemos que M cumple la ecuacion (2.3). En efecto
M =∞∑k=0
(AT )kWAk = W +∞∑k=1
(AT )kWAk. (2.5)
Por otro lado
ATMA = AT
(∞∑k=0
(AT )kWAk
)A =
∞∑k=1
(AT )kWAk (2.6)
33

De (2.5) y (2.6) se obtiene
M = W + ATMA.
Por ultimo comprobemos que M es unico. En efecto de (2.3) se sigue
vec(W ) = vec(M − ATMA)
= vec(M)− (AT ⊗ AT )vec(M)
= (I − AT ⊗ AT )vec(M)
vec(W ) = (I − AT ⊗ AT )vec(M). (2.7)
Por el item 3 de la proposicion 1.3 se tiene ρ(AT ⊗ AT ) = ρ(A)2 < 1. Luego por la
proposicion 1.2 existe una norma tal que ‖AT ⊗AT‖? < 1 esto implica por el teorema 1.4
I − AT ⊗ AT es inversible. Por ultimo de (2.7) se tiene que para cualquier W existe un
unico M tal que
M = vec−1((I − AT ⊗ AT )−1vec(W )
)(2.8)
Observacion 2.3. En la demostracion del teorema 2.2 se define la matriz M en (2.4)
el cual tiene su explicacion, la cual detallamos porque se asume esa forma. De (2.8) y
debido a la serie de Neumann se sigue
M = vec−1((I − AT ⊗ AT )−1vec(W )
)= vec−1
(∞∑k=0
(AT ⊗ AT )kvec(W )
)
= vec−1
(∞∑k=0
(Ak)T ⊗ (Ak)Tvec(W )
)
= vec−1
(∞∑k=0
vec
(Ak)TWAk)
=∞∑k=0
(Ak)TWAk
Teorema 2.3 ([10]). Consideremos el sistema (2.1). Las siguientes afirmaciones son
equivalentes:
a) El sistema (2.1) es asintoticamente estable.
34

b) El radio espectral de A es menor que uno, ρ(A) < 1.
c) Para toda matriz simetrica definida positiva definida W , existe una unica matriz
simetrica definida positiva M tal que
M − ATMA = W
d) Existe una matriz simetrica definida positiva M tal que
M − ATMA > 0
Demostracion. Por los teoremas 2.1 y 2.2 tenemos que a), b) y c) son equivalentes. Vemos
que c) implica d) se prueba de forma directa. Entonces nos concentraremos en demostrar
que d) implica b). Sea λ un autovalor de A con su respectivo autovector v 6= 0 entonces
vT (M − ATMA)v = vTMv − vTATMAv
= vTMv − (Av)TMAv
= vTMv − (λv)TMλv
= vTMv(1− λ2)
> 0.
Debido que M > 0 esto implica que 1− λ2 > 0 lo que concluye ρ(A) < 1.
Ejemplo 5. Sea
A =
1 3
1 2
.Se tiene que ρ(A) = 3.3028 entonces el sistema (2.1) no es asintoticamente estable. Esto
se puede comprobar mediante la ecuacion de Lyapunov. De (2.7) y tomando un W > 0 se
obtiene
W =
2 1
1 1
,M =
0.33 −0.33
−0.33 0
,donde observamos que M es simetrico pero no es definido positivo.
35

Ejemplo 6. Sea
A =
0.5 0
1 0.25
.Se tiene que ρ(A) = 0.5 entonces el sistema (2.1) es asintoticamente estable. Esto se
puede comprobar mediante la ecuacion de Lyapunov. De (2.7) y tomando un W > 0 se
obtiene un M tal que
W =
2 1
1 1
,M =
2.6667 2.6667
2.6667 5.3333
,donde observamos que M es simetrico y definido positivo.
36

Capıtulo 3
Sistemas lineales con saltos
markovianos
Una diversidad de procesos pueden ser modelados por el sistema (2.1), este no resulta
util en la modelizacion de fenomenos en los que por diversas circunstancias los parametros
cambian abrupta o aleatoriamente. En efecto, en muchas situaciones practicas el sistema
opera bajo condiciones adversas como en el caso de un avion que vuela en medio de
una tormenta recibiendo fuertes descargas electricas. Lo mismo puede suceder con un
modelo economico sujeto a alteraciones adversas debido al contexto exterior muchas veces
incierto o una central termica solar sujeta a cambios de temperatura por las condiciones
atmosfericas. A veces la alteracion de los parametros tambien es causada por fallas internas
del sistema, por la interconexion de los componentes o la antiguedad de estos. Para
modelar esta situacion se introducen los sistemas dinamicos con saltos markovianos. Este
modelo se ha venido utilizando desde la decada de los 70 en diversas areas de investigacion
como, por ejemplo, sistemas economicos [8], sistemas electricos [11], sistemas roboticos
[12], sistemas de control aereo [13], [14], [15], etc. La cadena de Markov asociada al sistema
muda de estado aleatoriamente a medida que transcurre el tiempo. Cada estado de la
cadena representa un modo de operar distinto del sistema. De esta manera, en lugar de un
unico sistema dinamico, se tienen en realidad muchos sistemas cambiando aleatoriamente
y modelando todos ellos un mismo fenomeno. El modelo matematico resultante es un
sistema dinamico estocastico conocido en la literatura como sistemas lineales con saltos
markovianos o por sus siglas en ingles, MJLS (ver p.ej. [4], [5]).
En vista que el fenomeno bajo estudio se torna aleatorio comenzamos el analisis
37

introduciendo un espacio de probabilidad (Ω,F ,P ), donde Ω es el espacio muestral, Fes la σ-algebra y P es la medida de probabilidad. La cadena de Markov es denotada por
θ(k) y su espacio de estado por Sθ = 1, . . . , N ;N ∈ N, consideramos la cadena de
Markov homogenea.
Consideremos el sistema x(k + 1) = Aθ(k)x(k)
x(0) = x0 ∈ Rn(3.1)
donde para todo i ∈ Sθ, Ai ∈ Mn(R), x(k) ∈ Rn. Vamos a asumir que las condiciones
iniciales x(0) y θ(0) son independientes, ademas x(0) es de segundo momento finito, es
decir, E(‖x(0)‖2) <∞.
El sistema (3.1) se le conoce como sistema no forzado. Buena parte de los resultados
de esta tesis estan referidos al sistema (3.1), tambien llamado en la literatura sistema
homogeneo.
Definicion 13. Se dice que el proceso estocastico x(k) = x(k)k∈Z+ es solucion de (3.1)
si para toda realizacion ω de θ(k), la ecuacion (3.1) es satisfecha puntualmente, esto es,
x(k + 1, ω;x(0)) = Aθ(k,ω)x(k, ω; 0), k ∈ Z+.
A la solucion x(k) del sistema (3.1) se le llama tambien trayectoria solucion.
Observacion 3.1. Para cada condicion inicial x(0) ∈ Rn dada, la solucion de (3.1) puede
ser obtenida de forma recursiva como sigue:
x(1) = Aθ(0)x(0)
x(2) = Aθ(1)x(1)
= Aθ(1)Aθ(0)x(0)
procediendo de este modo por induccion se obtiene
x(k) =k−1∏`=0
Aθ(k−1−`)x(0). (3.2)
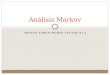
Ejemplo 7. Sean las matrices asociadas al sistema (3.1), para este caso N = 2.
A1 =
1 2
1 0
, A2 =
3 1
1 1
,38

la matriz de transicion de probabilidad y vector de distribucion inicial:
Π =
0 1
1 0
, π = [0.5 0.5].
Esto quiere decir que las unica realizaciones de la cadena de Markov son ω1 = 2,1,2, . . . y ω2 = 1,2,1, . . . . Como se representa en la siguiente figura
Se obtienen las trayectorias del sistema, para x(0) = [1 1]T
x(k)(ω1) =
1
1
,4
2
,8
4
,28
12
,52
28
· · · .
x(k)(ω2) =
1
1
,3
1
,10
4
,18
10
,64
28
· · · .
El siguiente lema se usa frecuentemente en la literatura al momento de hacer
derivaciones con esperanzas condicionadas. Esencialmente se prueba que la variable
aleatoria E1θ(k+1)=j|x(k), θ(k) definida en terminos de x(k) y θ(k), solo depende de
θ(k).
Para presentar el resultado, tengamos en cuenta la notacion siguiente:
P (θ(k + 1) = j|θ(k)) = pθ(k)j,
donde para cada j fijo en Sθ, pθ(k)j es una variable aleatoria cuyos valores son pij, i ∈ Sθ.
Lema 3.1 ([25]). Sea x(k) la trayectoria solucion de (3.1) con x(0) = x0. Entonces
E(1θ(k+1)=j|x(k), θ(k)
)= pθ(k)j
39

Demostracion. Para los valores especıficos x(k) = xk y θ(k) = ik tenemos
E(1θ(k+1)=j|x(k) = xk, θ(k) = ik)
=∑
zi∈0,1
ziP (1θ(k+1)=j = zi|x(k) = xk, θ(k) = ik)
=∑
zi∈0,1
ziP (1θ(k+1)=j = zi, x(k) = xk, θ(k) = ik)
P (x(k) = xk, θ(k) = ik)
=P (θ(k + 1) = j, x(k) = xk, θ(k) = ik)
P (x(k) = xk, θ(k) = ik)
=
L∑i0,...,ik−1=1
P (θ(k + 1) = j, θ(k) = ik, θ(k − 1) = ik−1, . . . , θ(0) = i0, x(0) = x0)
L∑i0,...,ik−1=1
P (θ(k) = ik, θ(k − 1) = ik−1, . . . , θ(0) = i0, x(0) = x0)
(3.3)
Como x(0) y θ(0) son independientes entonces sus correspondientes sigmas algebras
generadas son independientes. Ademas como σ (θ(k + 1), θ(k), . . . , θ(0)) ⊂ σ (θ(0))entonces σ (θ(k + 1), θ(k), . . . , θ(0)) y σ (x(0)) son independientes. Luego cada
evento θ(k + 1) = j, θ(k) = ik, θ(k − 1) = ik−1, . . . , θ(0) = i0 que pertenece a
σ (θ(k + 1), θ(k), . . . , θ(0)) y el evento x(0) = x0 que pertenece a σ(x(0)), son
independientes. Por esto y la propiedad markoviana, (3.3) se reduce a
E(1θ(k+1)=j|x(k) = xk, θ(k) = ik) =
L∑i0,...,ik−1=1
pikjpik−1ik . . . pi0i1P (θ(0) = i0)
L∑i0,...,ik−1=1
pik−1ik . . . pi0i1P (θ(0) = i0)
= pikj
lo que concluye la demostracion.
3.1. Notaciones Principales
En esta seccion presentamos ciertas notaciones las cuales seran utilizadas mas adelante,
las notaciones siguientes son fundamentales para analizar la estabilidad del sistema (3.1).
40

Para cada k ∈ Z+, i ∈ Sθ
Qi(k) = E(x(k)x(k)T1θ(k)=i) ∈Mn(R) (3.4)
Q(k) = (Q1(k), . . . , QN(k)) ∈ HnR (3.5)
Q(k) = E(x(k)x(k)T ) ∈Mn(R) (3.6)
Notamos que las matrices presentadas en (3.4) y (3.6) son matrices semidefinidas
positivas, esto implica que Q(k) ∈ Hn+R . Ademas que Q(k) pueden ser expresado como
sigue
Q(k) = E(x(k)x(k)T )
= E
(N∑i=1
x(k)x(k)T1θ(k)=i
)
=N∑i=1
E(x(k)x(k)T1θ(k)=i
)=
N∑i=1
Qi(k) (3.7)
La notacion Qi(k) definida en (3.4), puede expresarse de forma recursiva como se
expresa en el siguiente teorema.
Teorema 3.1 ([4]). Sea el sistema (3.1). Para cada k ∈ Z+, j ∈ Sθ se cumple
Qj(k + 1) =N∑i=1
pijAiQi(k)ATi (3.8)
Demostracion.
Qj(k + 1) = E(x(k + 1)x(k + 1)T1θ(k+1)=j)
= E(Aθ(k)x(k)x(k)TATθ(k)1θ(k+1)=j)
= E
(N∑i=1
Ai1θ(k)=ix(k)x(k)TATi 1θ(k+1)=j
)
=N∑i=1
AiE(x(k)x(k)T1θ(k+1)=j1θ(k)=i)ATi ,
41

condicionado a x(k), θ(k) y aplicando el item 5 de la proposicion 1.5 obtenemos:
Qj(k + 1) =N∑i=1
AiE(x(k)x(k)T1θ(k+1)=j1θ(k)=i)ATi
=N∑i=1
AiE(E(x(k)x(k)T1θ(k+1)=j1θ(k)=i|x(k), θ(k))
)ATi ,
debido a que x(k)1θ(k)=i es medible con respecto a x(k),θ(k) y aplicando el item 3 de
la proposicion 1.5 obtenemos:
Qj(k + 1) =N∑i=1
AiE
(x(k)x(k)T1θ(k)=iE
(1θ(k+1)=j
∣∣∣∣x(k), θ(k)
))ATi ,
debido al lema 3.1 obtenemos:
Qj(k + 1) =N∑i=1
AiE(x(k)x(k)T1θ(k)=ipij
)ATi
=N∑i=1
pijAiE(x(k)x(k)T1θ(k)=i
)ATi
=N∑i=1
pijAiQi(k)ATi
El siguiente lema sera ultil en la demostracion del lema 3.4.
Lema 3.2. Sea A ∈Mn(R), se cumple la siguiente relacion
tr(A) ≤ n‖A‖1 (3.9)
Demostracion. Debido a la definicion de la traza se sigue
tr(A) =n∑i=1
aii
≤n∑i=1
|aii|
≤n∑
i,j=1
|aij|
≤ n‖A‖1
42

Lema 3.3. Sea v ∈ Rn se cumple la siguiente relacion
‖vvT‖1 ≤ n‖v‖22 (3.10)
Demostracion. Debido a la definicion de la norma matricial, sea v = [v1 . . . vn]T se sigue
‖vvT‖1 =n∑
i,j=1
|vivj|
≤n∑
i,j=1
|vi|2 + |vj|2
2
= n‖v‖22
La siguiente desigualdad va ser de gran utilidad en la seccion de estabilidad.
Lema 3.4. Sea x(k) la solucion del sistema (3.1). Para cada k ∈ Z+ se cumplen las
siguientes desigualdadesE(‖x(k)‖2
2)
n≤ ‖Q(k)‖1 (3.11)
‖Q(k)‖1 ≤ nE(‖x(k)‖22), (3.12)
donde Q(k) esta definido en (3.5).
Demostracion. Primero probemos una desigualdad
E(‖x(k)‖22) = E
(N∑i=1
‖x(k)‖221θ(k)=i
)
=N∑i=1
E(‖x(k)‖221θ(k)=i)
=N∑i=1
E(tr(x(k)x(k)T1θ(k)=i))
=N∑i=1
tr(E(x(k)x(k)T1θ(k)=i))
=N∑i=1
tr(Qi(k))
= tr
(N∑i=1
Qi(k)
)
43

por (3.9) se obtiene
E(‖x(k)‖22) ≤ n
∥∥∥∥∥N∑i=1
Qi(k)
∥∥∥∥∥1
≤ nN∑i=1
‖Qi(k)‖1
= n‖Q(k)‖1
Ahora probemos la otra desigualdad, por la desigualdad de Jensen se sigue
‖Q(k)‖1 =N∑i=1
‖Qi(k)‖1
=N∑i=1
‖E(x(k)xT (k)1θ(k)=i)‖1
≤N∑i=1
E(‖x(k)xT (k)‖11θ(k)=i)
de (3.10) se sigue
‖Q(k)‖1 ≤ nN∑i=1
E(‖x(k)‖2
21θ(k)=i)
= nE(‖x(k)‖2
2
)
3.2. Operadores Principales
En esta seccion presentamos operadores principales que son fundamentales para
analizar la estabilidad del sistema (3.1).
L(.) = (L1(.), . . . ,LN(.)) ∈ B(HnR) (3.13)
T (.) = (T1(.), . . . , TN(.)) ∈ B(HnR) (3.14)
J (.) = (J1(.), . . . ,JN(.)) ∈ B(HnR) (3.15)
V(.) = (V1(.), . . . ,VN(.)) ∈ B(HnR) (3.16)
44

Para cada V = (V1, . . . , VN) ∈ HnR, i,j ∈ Sθ tenemos
Tj(V ) =N∑i=1
pijAiViATi ∈Mn(R)
Li(V ) = ATi
(N∑j=1
pijVj
)Ai ∈Mn(R)
Vj(V ) =N∑i=1
pijAjViATj ∈Mn(R)
Ji(V ) =N∑j=1
pijATj VjAj ∈Mn(R)
Teorema 3.2 ([4]). Para cada k ∈ Z+, se cumple:
Q(k + 1) = T (Q(k)) (3.17)
y ademas
Q(k) = T k(Q(0)) (3.18)
donde Q(k) esta definido en (3.5) y T en (3.14).
Demostracion.
T (Q(k)) = (T1(Q(k)), . . . , TN(Q(k)))
=
(N∑i=1
pi1AiQi(k)ATi , . . . ,N∑i=1
piNAiQi(k)ATi
)= (Q1(k + 1), . . . , QN(k + 1))
= Q(k + 1),
y por induccion se comprueba (3.18).
Lema 3.5. Para todo V ∈ HnR, se cumple las siguientes relaciones
T (V )T = T (V T )
L(V )T = L(V T )
V(V )T = V(V T )
J (V )T = J (V T )
45

Demostracion. En efecto:
T (V )T = (T1(V )T , . . . , TN(V )T )
=
(N∑i=1
pi1AiVTi A
Ti , . . . ,
N∑i=1
piNAiVTi A
Ti
)= (T1(V T ), . . . , TN(V T ))
= T (V T )
De forma analoga se cumple para L,V ,J .
Proposicion 3.1 ([4]). Los operadores definidos en (3.13)-(3.16), cumplen las siguientes
relaciones:
T = LT ,V = J T
Demostracion. Sean S, V ∈ HnR
〈T (V ), S〉 =N∑j=1
tr(Tj(V )TSj
)=
N∑j=1
tr(Tj(V T )Sj
)=
N∑j=1
tr
((N∑i=1
pijAiVTi A
Ti
)Sj
)
=N∑j=1
N∑i=1
pijtr((AiV
Ti A
Ti
)Sj)
=N∑i=1
tr
(V Ti A
Ti
(N∑j=1
pijSj
)Ai
)
=N∑i=1
tr(V Ti Li(S)
)= 〈V,L(S)〉
46

〈V(V ), S〉 =N∑j=1
tr(Vj(V )TSj
)=
N∑j=1
tr(Vj(V T )Sj
)=
N∑j=1
tr
((N∑i=1
pijAjVTi A
Tj
)Sj
)
=N∑j=1
N∑i=1
pijtr((AjV
Ti A
Tj
)Sj)
=N∑i=1
tr
(V Ti
(N∑j=1
ATj pijSjAj
))
=N∑i=1
tr(V Ti Ji(S)
)= 〈V,J (S)〉
3.3. Matrices Principales
En esta seccion presentamos las matrices que seran fundamentales para analizar la
estabilidad del sistema (3.1) mediante el radio espectral de esta y que estan ligados a los
operadores principales. Denotamos una matriz diagonal por bloques por diag[Mi], donde
Mi ∈Mn(R), i ∈ N, definido de la forma siguiente:
diag[Mi] =
M1 . . . 0...
. . ....
0 . . . MN
Presentamos ademas unas matrices auxiliares
C = (ΠT ⊗ In2) ∈MNn2(R)
N = diag[Ai ⊗ Ai] ∈MNn2(R)
47

Las matrices fundamentales que utilizaremos para analizar la estabilidad del sistema son
las siguientes:
A1 =CN
A2 =N TCT
A3 =NC
A4 =CTN T
La siguiente proposicion nos da una relacion entre los operadores principales y matrices
fundamentales.
Proposicion 3.2. Para cada V ∈ HnR se tiene
supvec(T (V )) = A1supvec(V )
supvec(L(V )) = A2supvec(V )
supvec(V(V )) = A3supvec(V )
supvec(J (V )) = A4supvec(V )
Demostracion. Sea V = (V1, . . . , VN).
supvec(T (V )) =
vec(T1(V ))
...
vec(TN(V ))
=
vec
(N∑i=1
pi1AiViAᵀi
)...
vec
(N∑i=1
piNAiViAᵀi
)
=
N∑i=1
pi1Ai ⊗ Aivec(Vi)
...N∑i=1
piNAi ⊗ Aivec(Vi)
48

=
p11A1 ⊗ A1 . . . pN1AN ⊗ AN
.... . .
...
p1NA1 ⊗ A1 . . . pNNAN ⊗ AN
vec(V1)
...
vec(VN)
=
p11In . . . pN1In
.... . .
...
p1NIn . . . pNNIn
A1 ⊗ A1 . . . 0
.... . .
...
0 . . . AN ⊗ AN
supvec(V )
=
p11 . . . pN1
.... . .
...
p1N . . . pNN
⊗ In diag[Ai ⊗ Ai]supvec(V )
=(ΠT ⊗ In
)diag[Ai ⊗ Ai]supvec(V )
= A1supvec(V ),
de forma analoga se cumple para L,V ,J .
Observacion 3.2. De la proposicion 3.2 se observa el siguiente esquema
Notamos que A1 es la representacion matricial de T . Debido a que supvec es un
homeomofirmos esto implica que
ρ(A1) = ρ(T ), ρ(A2) = ρ(L), ρ(A3) = ρ(V), ρ(A4) = ρ(J )
Ademas se tiene que AT1 = A2, AT3 = A4 entonces
ρ(A1) = ρ(A2) y ρ(A3) = ρ(A4).
Por el lema 1.2 implica
ρ(A1) = ρ(A2) = ρ(A3) = ρ(A4)
49

En resumen se concluye
ρ(A1) = ρ(A2) = ρ(A3) = ρ(A4) = ρ(T ) = ρ(L) = ρ(V) = ρ(J )
Por otro lado de la proposicion 3.2 y (3.17) se obtiene
supvec(Q(k + 1)) = supvec(T (Q(k)))
= A1supvec(Q(k)), (3.19)
y por induccion implica
supvec(Q(k)) = Ak1supvec(Q(0)) (3.20)
50

Capıtulo 4
Estabilidad
El analisis de estabilidad de sistemas lineales con saltos markovianos por una cadena
de Markov se remonta a la decada de los 70 con Rosenbloom [6] . Desde entonces la
teorıa a desarrollado abundantes resultantes de gran importancia teorıca y practica, como
se mostro en la introduccion de este trabajo. La naturaleza estocastica de un sistema
con saltos markovianos induce a considerar varios tipos de estabilidad en este sentido. A
continuacion presentamos las definiciones de estabilidad para el sistema (3.1) dadas en la
literatura [2], [5].
Definicion 14. Se dice que el sistema (3.1) es
a) Estable en media cuadratica (EMC) si para cualquier x(0) ∈ Rn y cualquier θ(0) se
tiene
lımk→∞
Q(k) = 0,
donde Q(k) esta definido en (3.6).
b) Estocasticamente estable (EE) si para cualquier x(0) ∈ Rn y cualquier θ(0) se tiene
∞∑k=0
E(‖x(k)‖2
2
)<∞
c) Exponencialmente estable (EXE) si para cualquier x(0) ∈ Rn y cualquier θ(0) existen
constantes 0 < α < 1 ≤ β tal que para todo k ∈ Z+ se tiene
E(‖x(k)‖2
2
)≤ βαkE
(‖x(0)‖2
2
),
donde α y β son independientes de x(0) y θ(0) .
51

d) Casi seguramente estable (CSE) si para cualquier x(0) ∈ Rn y cualquier θ(0) se
tiene
P(
lımk→∞‖x(k)‖2 = 0
)= 1
4.1. Test de estabilidad mediante el radio espectral
de A1
En esta seccion analizamos la estabilidad de (3.1) en terminos del radio espectral de
la matriz A1. El resultado que se presenta constituye un test facilmente implementable,
por ejemplo, en MATLAB, con el que se puede determinar la estabilidad del sistema.
Lema 4.1 ([25]). El sistema (3.1) es EMC si y solo si para cualquier x(0) ∈ Rn y para
cualquier θ(0) se cumple
lımk→+∞
Q(k) = 0. (4.1)
Demostracion.
Asumamos que el sistema es EMC. De la desigualdad
‖Qi(k)‖ =∥∥E (x(k)xT (k)1θ(k)=i
)∥∥ ≤ ∥∥E (x(k)xT (k))∥∥ = ‖Q(k)‖
se sigue que lımk→+∞
Qi(k) = 0 y esto implica inmediatamente (4.1).
Ahora si lımk→+∞
Q(k) = 0 entonces lımk→+∞
Qi(k) = 0 y por (3.7) se concluye que el
sistema (3.1) es EMC.
El teorema 4.1 provee una herramienta de facil implementacion computacional para
analizar si el sistema (3.1) es EMC mediante el radio espectral de la matrizA1. El resultado
es completamente analogo al establecido en el teorema 2.1.
Teorema 4.1 ([25]). El sistema (3.1) es EMC si y solo si ρ(A1) < 1.
Demostracion. Si el sistema es EMC, entonces por el lema 4.1 se tiene lımk→+∞
Q(k) = 0.
Como x(0) y θ(0) son arbitrarios y teniendo en cuenta que
Qi(0) = Ex(0)xT (0)
E
1θ(0)=i
= Ex(0)xT (0)
πi,
entonces siempre es posible obtener Q(0) con componentes no nulas. Entonces por (3.18)
se deduce que ρ(T ) < 1 entonces ρ(A1) < 1.
52

Si ρ(A1) < 1 entonces ρ(T ) < 1. Tomando lımite a ambos lados de (3.18) y por la
proposicion 1.2 se tiene lımk→+∞
Q(k) = 0. De aquı, por el lema 4.1, se concluye que el
sistema es EMC.
4.1.1. Ejemplos
En esta seccion se proporcionan diferentes ejemplos que ilustran los resultados
presentados en las secciones previas. En particular se analiza la estabilidad del sistema
estocastico en relacion con la estabilidad de los subsistemas que lo conforman.
Ejemplo 8. Consideramos el sistema escalar con 2 modos, a1 = 0.7 y a2 = 1.2, y matriz
de transicion de probabilidad
Π =
0.6 0.4
0.8 0.2
,En este caso la matriz A1 es :
A1 =
0.2940 1.1520
0.1960 0.2880
y dado que ρ(A1) = 0.7662 < 1 entonces el sistema es EMC. Notemos que el modo a1 es
estable, mientras que el modo a2 es inestable.
Ejemplo 9. En este ejemplo se muestra un sistema con todos sus modos estables, sin
embargo, el sistema no es EMC.
A1 =
0 4
0 0.5
A2 =
0.6 0
8 0
, Π =
0.9 0.1
0.3 0.7
En este caso la matriz A1 es:
A1 =
0 0 0 14.4 0.108 0 0 0
0 0 0 1.8 1.44 0 0 0
0 0 0 1.8 1.44 0 0 0
0 0 0 0.225 19.2 0 0 0
0 0 0 1.6 0.252 0 0 0
0 0 0 0.2 3.36 0 0 0
0 0 0 0.2 3.36 0 0 0
0 0 0 0.025 44.8 0 0 0
.
53

Notamos que todos los modos son estables, pero como ρ(A1) = 5.7811 > 1 el sistema
no es EMC.
Ejemplo 10. En este ejemplo se muestra un sistema con todos sus modos inestables, sin
embargo, el sistema es EMC.
A1 =
1.5 −2
0 0
, A2 =
0 10
0 2
, Π =
0.2 0.8
0.85 0.15
Claramente los modos del sistema son inestables. La matriz A1 es:
A1 =
0.45 −0.6 −0.6 0.8 0 0 0 85
0 0 0 0 0 0 0 17
0 0 0 0 0 0 0 17
0 0 0 0 0 0 0 3.4
1.8 −2.4 −2.4 3.2 0 0 0 15
0 0 0 0 0 0 0 3
0 0 0 0 0 0 0 3
0 0 0 0 0 0 0 0.6
Como ρ(A1) = 0,6 < 1 el sistema es EMC.
Los ejemplos presentados permiten concluir que no hay relacion entre la estabilidad
de los modos y la estabilidad del sistema visto como un todo.
4.2. Test de estabilidad mediante la ecuacion de
Lyapunov
En esta seccion se presenta una caracterizacion algebraica para la estabilidad
estocastica del sistema (3.1) mediante un conjunto de ecuaciones de tipo Lyapunov.
Observe que cuando el espacio de estados se reduce al conjunto unitario Sθ = 1 la
ecuacion (4.2) se convierte en la ecuacion de Lyapunov para sistemas lineales sin saltos.
La ecuacion de Lyapunov que proponemos para el sistema (3.1) es de la forma siguiente:
Mi −N∑j=1
pijATi MjAi = Wi, i,j ∈ Sθ, (4.2)
54

en esta ecuacion todas las matrices estan definidas en el espacio Mn(R).
Sea Mθ(k) una matriz simetrica definida positiva y definamos una funcion de Lyapunov
apropiada, como sigue:
V (x(k),θ(k)) = xT (k)Mθ(k)x(k). (4.3)
Observe que V (·,·) es una funcion positivo definida. Enseguida se muestra que esta funcion
es decreciente.
Lema 4.2 ([25]). Sea x(k) la trayectoria solucion del sistema (3.1) y supongamos que dado
el conjunto Wi; i ∈ Sθ de matrices simetricas definidas positivas existe un conjunto de
matrices simetricas Mi; i ∈ Sθ definidas positivas que satisfacen (4.2). Entonces
EV (x(k + 1), θ(k + 1))− V (x(k), θ(k)) = −ExT (k)Wθ(k)x(k)
. (4.4)
Demostracion.
EV (x(k + 1), θ(k + 1))− V (x(k), θ(k))
= ExT (k + 1)Mθ(k+1)x(k + 1)− xT (k)Mθ(k)x(k)
= ExT (k)ATθ(k)Mθ(k+1)Aθ(k)x(k)− xT (k)Mθ(k)x(k)
= E
N∑
i,j=1
xT (k)ATi MjAix(k)1θ(k+1)=j1θ(k)=i −N∑i=1
xT (k)Mi1θ(k)=ix(k)
= E
E
N∑
i,j=1
xT (k)ATi MjAix(k)1θ(k+1)=j1θ(k)=i −N∑i=1
xT (k)Mi1θ(k)=ix(k)
∣∣∣∣x(k), θ(k)
Debido que xT (k)x(k)1θ(k)=i es medible con respecto a x(k), θ(k) la igualdad de
arriba se puede escribir como
EV (x(k + 1), θ(k + 1))− V (x(k), θ(k))
= E
N∑
i,j=1
xT (k)ATi MjAix(k)1θ(k)=iE
1θ(k+1)=j|x(k), θ(k)−
N∑i=1
xT (k)Mi1θ(k)=ix(k)
55

De aquı, por el lema 3.1 se sigue:
EV (x(k + 1), θ(k + 1))− V (x(k), θ(k))
= E
N∑
i,j=1
xT (k)ATi MjAix(k)1θ(k)=ipθ(k)j −N∑i=1
xT (k)Mi1θ(k)=ix(k)
= E
N∑
i,j=1
xT (k)ATi MjAix(k)pij −N∑i=1
xT (k)Mi1θ(k)=ix(k)
= E
N∑i=1
xT (k)
N∑j=1
ATi MjAipij −Mi
1θ(k)=ix(k)
= E
−xT (k)
N∑i=1
Wi1θ(k)=ix(k)
= −E
xT (k)Wθ(k)x(k)
El resultado anterior implica inmediatamente la ecuacion (4.5).
Corolario 4.1 ([25]). Bajo las hipotesis del lema 4.2 se sigue que
EV (x(k + 1), θ(k + 1))− V (x(k), θ(k))EV (x(k), θ(k))
= −ExT (k)Wθ(k)x(k)
ExT (k)Mθ(k)x(k)
, x(k) 6= 0 (4.5)
Esta igualdad sera utilizada en la demostracion del resultado principal de la presente
seccion. Para presentar el siguiente lema, recordemos que la desigualdad de Rayleigh se
aplica para matrices simetricas, si las matrices son definidas positivas entonces los valores
propios son estrictamente positivos.
Lema 4.3 ([25]). La funcion de Lyapunov V (.; .) definida en (4.3) es decreciente
exponencialmente en media, es decir, existe 0 < α < 1, tal que
EV (x(k), θ(k)) ≤ αkEV (x(0), θ(0)), (4.6)
Demostracion. Para x(k) = 0 la desigualdad es trivial.
Ahora para el caso x(k) 6= 0, aplicando la desigualdad de Rayleigh a Wθ(k) y Mθ(k)
definimos
µ = mınθ(k)∈Sθ
λminWθ(k)
56

Debido que Wθ(k) es una matriz definita positiva entonces µ > 0 y ademas
µ‖x(k)‖22 ≤ λminWθ(k)‖x(k)‖2
2 ≤ xT (k)Wθ(k)x(k) (4.7)
y
δ = maxθ(k)∈Sθ
λmaxMθ(k)
Debido que Mθ(k) es una matriz definida positiva entonces δ > 0 y ademas
xT (k)Mθ(k)x(k) ≤ λmaxMθ(k)‖x(k)‖22 ≤ δ‖x(k)‖2
2 (4.8)
De (4.7) y (4.8) se obtiene
µE‖x(k)‖22 ≤ E
xT (k)Wθ(k)x(k)
(4.9)
y
ExT (k)Mθ(k)x(k)
≤ δE‖x(k)‖2
2. (4.10)
De (4.9) y (4.10) implica
µE‖x(k)‖22
δE‖x(k)‖22≤ExT (k)Wθ(k)x(k)ExT (k)Mθ(k)x(k)
,
µ
δ≤ExT (k)Wθ(k)x(k)ExT (k)Mθ(k)x(k)
.
Ahora definimos
α = 1− µ
δ< 1 (4.11)
la desigualdad de arriba se puede escribir como sigue
−ExT (k)Wθ(k)x(k)ExT (k)Mθ(k)x(k)
≤ −µδ
= α− 1 (4.12)
De (4.5) y (4.12) se sigue
0 <EV (x(k + 1); θ(k + 1))
EV (x(k); θ(k))≤ α,
esto implica
EV (x(k + 1); θ(k + 1)) ≤ αEV (x(k); θ(k))
y de aquı, el resultado se concluye por induccion.
57

Teorema 4.2 ([2]). El sistema (3.1) es EE si y solo si para cualquier conjunto de matrices
simetricas Wi; i ∈ Sθ definidas positivas existe un conjunto de matrices simetricas
Mi; i ∈ Sθ definidas positivas que satisfacen (4.2).
Demostracion. Asumamos que se cumple (4.2) y consideremos la funcion de Lyapunov
definida en (4.4). Si x(k0) = 0 para algun k0 ∈ Z+, debido a la recurrencia de (3.1)
tendremos que x(k) = 0 para todo k ≥ k0 y por lo tanto la estabilidad estocastica de
(3.1) es trivial. Asumamos, pues, que x(k) 6= 0,∀ k ∈ Z+ entonces de (4.6) se sigue:
E
n∑k=0
V (x(k), θ(k))
≤ (1 + α + α2 + . . .+ αn)EV (x(0), θ(0))
=
(αn+1 − 1
α− 1
)EV (x(0), θ(0))
=
(αn+1 − 1
α− 1
)ExT (0)Mθ(0)x(0) (4.13)
Ahora definamos
β = mınθ(k)∈Sθ
λmınMθ(k)
Como Mθ(k) es una matriz definida positiva entonces β > 0 implica
βxT (k)x(k) ≤ λmınMθ(k)xT (k)x(k) ≤ xT (k)Mθ(k)x(k) (4.14)
De (4.13) y (4.14) se sigue
E
n∑k=0
xT (k)x(k)
≤(αn+1 − 1
β(α− 1)
)ExT (0)Mθ(0)x(0)
Como 0 < α < 1 entonces
lımn→∞
E
n∑k=0
xT (k)x(k)
≤(
1
c(1− α)
)ExT (0)Mθ(0)x(0) <∞
lo que prueba que el sistema (3.1) es EE.
Ahora asumamos que el sistema (3.1) es EE y para comenzar definamos la matriz Dlk,
como sigue:
Dlk =
l∏s=k
Aθ(l−s+k+1) (4.15)
58

Con base enDlk definamos ahora la sucesion de matrices aleatorias M(n− k, θ(k)) : 0 ≤ k ≤ n
de la siguiente forma :
M(n− k, θ(k)) =Wθ(k) + ATθ(k)E
Wθ(k+1)
∣∣∣∣x(k), θ(k)
Aθ(k)
+n−2∑l=k
ATθ(k)E
(Dlk
)TWθ(l+2)
(Dlk
) ∣∣∣∣x(k), θ(k)
Aθ(k) (4.16)
Observe que debido a que Wθ(l) es simetrica y definida positiva entonces M(n − k, θ(k))
es tambien simetrica y definida positiva.
A partir de (4.16) la sucesion escalar
xT (k)M(n− k, θ(k))x(k) =xT (k)Wθ(k)x(k) + xT (k)ATθ(k)E
Wθ(k+1)
∣∣∣∣x(k), θ(k)
Aθ(k)x(k)
+n−2∑l=k
xT (k)ATθ(k)E
(Dlk
)TWθ(l+2)
(Dlk
) ∣∣∣∣x(k), θ(k)
Aθ(k)x(k)
se puede escribir de la siguiente forma:
xT (k)M(n− k, θ(k))x(k) = E
n∑l=k
xT (l)Wθ(l)x(l)
∣∣∣∣x(k), θ(k)
(4.17)
Para x(k) = xk y θ(k) = i, de (4.17) se sigue que
xTkM(n− k, i)xk = E
n∑l=k
xT (l)Wθ(l)x(l)
∣∣∣∣x(k) = xk, θ(k) = i
(4.18)
lo que implica de inmediato que la sucesion es creciente puesto que Wθ(l) es positivo
definida para todo θ(l) ∈ Sθ. Veamos enseguida que la sucesion tambien es acotada. Esto
se sigue de la estabilidad estocastica del sistema. En efecto, por la desigualdad de Rayleigh
tenemos:
xT (k)Wθ(k)x(k) ≤ λmaxWθ(k)xT (k)x(k) ≤ γxT (k)x(k), (4.19)
donde γ esta definido por
γ = maxθ(k)∈Sθ
λmax(Wθ(k)).
59

Luego sustituyendo (4.19) en (4.17) tenemos
xTkM(n− k, i)xk = E
n∑l=k
xT (l)Wθ(l)x(l)
∣∣∣∣x(k) = xk, θ(k) = i
≤ γE
n∑l=k
xT (l)x(l)
∣∣∣∣x(k) = xk, θ(k) = i
≤ γ
E
n∑l=k
xT (l)x(l)1x(k)=xk,θ(k)=i
P (x(k) = xk, θ(k) = i)
≤ γ
E
n∑l=k
xT (l)x(l)
P (x(k) = xk, θ(k) = i)
Dado que el sistema es EE esta desigualdad implica que la sucesion de lado izquierdo es
acotada superiormente. Lo anterior prueba que el lımite lımn→∞
xTkM(n− k, i)xk existe para
todo xk ∈ Rn.
Sea M(n− k, i) = [m(n− k,i)jr]. Tomando xk = ej entonces existe el lımite
lımn→∞
eTjM(n− k, i)ej = lımn→∞
m(n− k,i)jj = m(i)jj (4.20)
De otro lado, tomando xk = ei + ej se sigue
(ej + er)TM(n− k, i)(ej + er) = eTjM(n− k, i)ej + eTrM(n− k, i)er
+ eTjM(n− k, i)er + eTrM(n− k, i)ej (4.21)
Como M(n− k, i) es simetrica entonces eTjM(n− k, i)er = eTrM(n− k, i)ej. El lımite de
la izquierda de (4.21) existe y por (4.20) se tiene que
lımn→∞
eTjM(n− k, i)er = lımn→∞
m(n− k,i)jr = m(i)jr (4.22)
De (4.20) y (4.22) se concluye
lımn→∞
M(n− k, i) = Mi, (4.23)
donde Mi = [m(i)jr].
60

De (4.17) y del item 4 de la proposicion 1.5, se sigue:
ExT (0)M(n, θ(0))x(0)− xT (1)M(n− 1, θ(1))x(1)
∣∣x(0), θ(0)
= E
E
n∑l=0
xT (l)Wθ(l)x(l)
∣∣∣∣x(0), θ(0)
∣∣∣∣x(0), θ(0)
− E
E
n∑l=1
xT (l)Wθ(l)x(l)
∣∣∣∣x(1), θ(1)
∣∣∣∣x(0), θ(0)
= E
n∑l=0
xT (l)Wθ(l)x(l)
∣∣∣∣x(0), θ(0)
− E
E
n∑l=1
xT (l)Wθ(l)x(l)
∣∣∣∣x(0), θ(0), x(1), θ(1)
∣∣∣∣x(0), θ(0)
= E
n∑l=0
xT (l)Wθ(l)x(l)
∣∣∣∣x(0), θ(0)
− E
n∑l=1
xT (l)Wθ(l)x(l)
∣∣∣∣x(0), θ(0)
= xT (0)Wθ(0)x(0) (4.24)
Por otro lado,
ExT (0)M(n, θ(0))x(0)− xT (1)M(n− 1, θ(1))x(1)|x(0), θ(0)
= xT (0)M(n, θ(0))x(0)− ExT (1)M(n− 1, θ(1))x(1)|x(0), θ(0)
= xT (0)M(n, θ(0))x(0)− ExT (0)ATθ(0)M(n− 1, θ(1))Aθ(0)x(0)|x(0), θ(0)
= xT (0)M(n, θ(0))x(0)− xT (0)ATθ(0)EM(n− 1, θ(1))|x(0), θ(0)Aθ(0)x(0) (4.25)
De (4.24) y (4.25) para θ(0) = i y x(0) = x0 se obtiene
xT0Wix0 = xT0M(n,i)x0 − xT0ATi EM(n− 1, θ(1))|x(0) = x0, θ(0) = iAix0
= xT0M(n, i)x0
−N∑j=1
xT0ATi E1θ(1)=jM(n− 1,j)|x(0) = x0, θ(0) = iAix0
= xT0M(n, i)x0
−N∑j=1
xT0ATi M(n− 1,j)E1θ(1)=j|x(0) = x0, θ(0) = iAix0
= xT0M(n, i)x0
−N∑j=1
xT0ATi M(n− 1,j)pijAix0 (4.26)
61

Como (4.26) es valido para cualquier x0 ∈ Rn y por el lema 1.1 se tiene:
M(n,i)−N∑j=1
pijATi M(n− 1, j)Ai = Wi. (4.27)
Finalmente, tomando lımite a ambos lados de (4.27) cuando n→∞ se obtiene
Mi −N∑j=1
pijATi MjAi = Wi
Observacion 4.1. La ecuacion (4.2) se puede reescribir de la forma siguiente. Aplicando
el operador vec a (4.2) se obtiene
vec(Wi) = vec(Mi)−N∑j=1
pij(ATi ⊗ ATi )vec(Mj).
Esto es equivalente a
vec(W1)
...
vec(WN)
=
vec(M1)
...
vec(MN)
−p11A
T1 ⊗ AT1 . . . p1NA
TN ⊗ ATN
.... . .
...
pN1AT1 ⊗ AT1 . . . pNNA
TN ⊗ ATN
vec(M1)...
vec(MN)
=
vec(M1)
...
vec(MN)
−p11In . . . p1NIn
.... . .
...
pN1In . . . pNNIn
AT1 ⊗ AT1 . . . 0
.... . .
...
0 . . . ATN ⊗ ATN
vec(M1)...
vec(MN)
=
vec(M1)
...
vec(MN)
−p11 . . . p1N
.... . .
...
pN1 . . . pNN
⊗ InAT1 ⊗ AT1 . . . 0
.... . .
...
0 . . . ATN ⊗ ATN
vec(M1)...
vec(MN)
.Definiendo
W = (W1, . . . ,WN) ∈ Hn+R ,W > 0
M = (M1, . . . ,MN) ∈ Hn+R ,M > 0
62

la ultima ecuacion se puede expresar
supvec(W ) = supvec(M)− (Π⊗ In) diag[ATi ⊗ ATi ]supvec(M)
= supvec(M)− CTN T supvec(M)
= supvec(M)−A3supvec(M)
= supvec(M)− supvec(V(M))
= supvec(M − V(M))
Esto implica que la ecuacion (4.2) es equivalente a para cualquier W ∈ Hn+R ,W > 0 existe
un unico M ∈ Hn+R ,M > 0 tal que
W = M − V(M).
Por otro lado notamos lo siguiente
supvec(W ) = supvec(M)−A3supvec(M)
= (I −A3)supvec(M) (4.28)
Si el sistema (3.1) es EMC por el teorema 4.1 entonces ρ(A3) < 1 esto implica que la
matriz I −A3 es inversible. De (4.28) se obtiene
M = supvec−1((I −A3)−1supvec(W )
)(4.29)
En la siguiente seccion se proporcionan diferentes ejemplos que ilustran los resultados
presentados en las seccion previa.
4.2.1. Ejemplos
El siguiente ejemplo es un sistema que no es EE, el cual comprobaremos mediante la
ecuacion del tipo Lyapunov.
Ejemplo 11. Sean
A1 =
1 0
1 0.5
A2 =
0.5 1
2 1
, Π =
0.5 0.5
0.9 0.1
considerando W1 y W2 matrices simetricas definidas postivas
W1 =
1 0
0 2
W2 =
1 1
1 2
,63

de (4.29) se obtiene
M1 =
−1.0483 −3.7348
−3.7348 −3.2006
M2 =
0.3065 −0.7108
−0.7108 −1.0593
,donde notamos que M1 y M2 son matrices simetricas pero no son defnidas positivas.
El siguiente ejemplo es un sistema que es EE, el cual comprobaremos mediante la
ecuacion del tipo Lyapunov.
Ejemplo 12. Sean
A1 =
1 0
0 0.2
A2 =
0.5 1
0 0.1
, Π =
0.6 0.4
0.2 0.8
considerando W1 y W2 matrices simetricas definidas postivas
W1 =
1 0
0 2
W2 =
1 1
1 2
,de (4.29) se obtiene
M1 =
5.0111 0.0604
0.0604 2.0534
M2 =
7.0223 1.2175
1.2175 2.0492
,donde notamos que M1 y M2 son matrices simetricas y ademas son defnidas positivas.
4.3. Equivalencia entre las diferentes
nociones de estabilidad
En esta seccion se establecen la relaciones entre los diferentes tipos de estabilidad
introducidos en la seccion anterior. Se prueba que bajo la condicion de ser Sθ un espacio
de estados finito, las nociones de estabilidad (a)-(c) son equivalentes y todas esta implican
la estabilidad (d), no siendo necesariamente cierto lo contrario (ver [4, Ejem. 3.17,Pag.39]).
Ası pues, la estabilidad CSE es mas debil que las demas. Comencemos por el lema
siguiente:
64

Lema 4.4 ([25]). Para la matriz Ri(k), definida por
Ri(k) =k∑l=0
Qi(l) =k∑l=0
E(x(l)xT (l)1θ(l)=i
), i ∈ Sθ
se cumple:
N∑i=1
tr(Ri(k)) =k∑l=0
E(‖x(l)‖2
2
)(4.30)
Demostracion. La prueba se sigue directamente de la definicion de Ri(k). En efecto,
N∑i=1
tr(Ri(k)) =N∑i=1
tr
(k∑l=0
E(x(l)xT (l)1θ(l)=i
))
=N∑i=1
k∑l=0
E(tr(x(l)xT (l)1θ(l)=i)
)=
N∑i=1
k∑l=0
E(‖x(l)‖2
21θ(l)=i)
=k∑l=0
E
(N∑i=1
‖x(l)‖221θ(l)=i
)
=k∑l=0
E(‖x(l)‖2
2
)
Teorema 4.3 ([25]). El sistema (3.1) es EMC si y solo si es EE.
Demostracion.
Si el sistema (3.1) es EMC. De (3.19) se sigue que
(I −A1) supvec(Q(k)) = A1 (supvec(Q(k − 1))− supvec(Q(k))) , k ∈ N.
por la propiedad telescopica se obtiene
(I − A1)
(k∑l=1
supvec(Q(l))
)= A1(supvec(Q(0))− supvec(Q(k)))
(I − A1)
(k∑l=1
supvec(Q(l))
)= supvec(Q(1))−A1supvec(Q(k))
65

Puesto que el sistema es EMC entonces ρ(A) < 1 lo que implica que la matriz I −A1 es
inversible. Por consiguiente,
k∑l=1
supvec(Q(l)) = (I −A1)−1(supvec(Q(1))−A1supvec(Q(k)))
y por el lema 4.1, tomando lımite a ambos lados de esta ecuacion, se obtiene
lımk→∞
k∑l=1
supvec(Q(l)) = (I − A1)−1supvec(Q(1))
Ası pues la serie de vectoresk∑l=0
supvec(Q(l)) converge lo que implica que la serie de las
componentes tambien converge. Entonces existen Ti ∈ Rn2, i ∈ Sθ, tal que
Ti = lımk→∞
k∑l=0
vec(Qi(l))
y tomando en cuenta que el operador vec es continuo, entonces
Ti = vec
(lımk→∞
k∑l=0
Qi(l)
)
De aquı y por la definicion de Ri(k) se sigue que
lımk→∞
Ri(k) = lımk→∞
k∑l=0
Qi(l) = vec−1(Ti) (4.31)
Finalmente, por (4.30)
lımk→∞
k∑l=0
E(‖x(l)‖2
2
)= lım
k→∞
N∑i=1
tr (Ri(k))
=N∑i=1
tr(
lımk→∞
Ri(k))
=N∑i=1
tr(vec−1(Ti)) <∞
lo que prueba que (3.1) es EE.
Si el sistema es EE,∞∑k=0
E(‖x(k)‖2
2
)< ∞ esto implica que lım
k→∞E(‖x(k)‖2
2
)= 0. La
estabilidad EMC se comprueba por (3.12).
66

Para establecer la equivalencia entre la EMC y EXE, teorema 4.4, sera de utilidad la
desigualdad (4.32).
Lema 4.5. Sea A ∈Mn(R). Si ρ(A) < 1 entonces existen β ≥ 1 y 0 < γ < 1 tal que
‖Ak‖1 ≤ βγk, k ∈ Z+ (4.32)
Demostracion. Aplicamos el teorema de la forma canonica de Jordan para A entonces
existe P ∈Mn(R) no singular, tal que A = PJP−1 y esto implica Ak = PJkP−1, k ∈ Z+.
Sea λ1, . . . , λs los autovalores de A, la matriz Jk es de la forma siguiente:
Jk =
Jkm1(λ1) 0 0 · · · 0
0 Jkm2(λ2) 0 · · · 0
... · · · . . . · · · ...
0 · · · 0 Jkms−1(λs−1) 0
0 · · · · · · 0 Jkms(λs)
,
donde los bloques de Jordan Jkmi(λi) son de la forma siguiente:
Jkmi(λi) =
λki(k1
)λk−1i
(k2
)λk−2i · · ·
(k
mi−1
)λk−mi+1i
0 λki(k1
)λk−1i · · ·
(k
mi−2
)λk−mi+2i
......
. . . . . ....
0 0 · · · λki(k1
)λk−1i
0 0 · · · 0 λki
Sea γ = ρ(A) < 1. Notamos que
‖Jk‖1 =ms∑i=1
(k∑
j=k−mi+1
ai,j|λi|j), ai,j ∈ N
≤m∑j=0
bjγk−j, bj ∈ N, m = maxms
= γk
(m∑j=0
bjγ−j
). (4.33)
Se tiene quem∑j=0
bjγ−j ≥ 1, se define β =
(m∑j=0
bjγ−j
)‖P‖1‖P−1‖1 ≥ 1.
67

De (4.33) se sigue
‖Ak‖1 = ‖PJkP−1‖1
≤ ‖P‖1‖P−1‖1‖Jk‖1
≤ ‖P‖1‖P−1‖1
(m∑j=0
bjγ−j
)γk
= βγk
Consideremos
‖supvec‖1 = sup‖V ‖6=0
‖supvec(V )‖1
‖V ‖1
‖supvec−1‖1 = sup‖v‖6=0
‖supvec−1(v)‖1
‖v‖1
Estamos preparados para presentar la equivalencia entre EMC y EXE.
Teorema 4.4 ([25]). El sistema (3.1) es EMC si y solo si es EXE.
Demostracion. Si el sistema es EMC entonces ρ(A1) < 1, por el lema 4.5 se tiene que
para algun β ≥ 1 y 0 < γ < 1 tenemos que
‖Ak1‖1 ≤ βγk, para todo k ∈ Z+
Por (3.11) y (3.20) se sigue
E(‖x(k)‖2
2
)≤ n‖Q(k)‖1
= n‖supvec−1(Ak1supvec(Q(0)))‖1
≤ n‖supvec−1‖1‖Ak1‖1‖supvec‖1‖Q(0)‖1
Ademas por (3.12)
E(‖x(k)‖2
2
)≤ βn2‖supvec−1‖1‖supvec‖1γ
k‖E(‖x(0)‖22)
= βγkE(‖x(0)‖22)
donde β = βn2‖supvec−1‖1‖supvec‖1 ≥ 1. Por otro lado, de la definicion se sigue
directamente que la EXE implica la EMC.
68

Teorema 4.5 ([25]). Si el sistema (3.1) es EMC entonces es CSE.
Demostracion. Del teorema anterior si el sistema es EMC entonces el es EXE, es decir,
existen constantes 0 < α < 1 ≤ β tal que para todo k ∈ Z+ se tiene
E(‖x(k)‖2
2
)≤ βαkE
(‖x(0)‖2
2
),
Esta desigualdad implica
∞∑k=0
E(‖x(k)‖2
2
)≤ β
1− αE(‖x(0)‖2
2
)(4.34)
aplicando la desigualdad de Markov se sigue
P (‖x(k)‖ ≥ ε) ≤ E (‖x(k)‖22)
ε2(4.35)
De (4.34) y (4.35) se obtiene
∞∑k=0
P (‖x(k)‖ ≥ ε) ≤ 1
ε2
∞∑k=0
E(‖x(k)‖2
2
)≤ β
ε2(1− α)E(‖x(0)‖2
2
)(4.36)
Definiendo la sucesion de eventos
Ak = ‖x(k)‖2 ≥ ε
se sigue de (4.36) y del lema de Borel-Cantelli que
P
(∞⋂k=1
∞⋃n=k
An
)= 0.
Tomando complemento en esta igualdad se obtiene
P
(∞⋃k=1
∞⋂n=k
Acn
)= 1;
de donde
P(
lımn→∞
‖x(k)‖2 = 0)
= 1.
Recordemos el teorema de Lyapunov para el siguiente sistema
x(k + 1) = f(x(k)) (4.37)
69

Teorema 4.6. Si φ es una funcion de Lyapunov para el sistema (4.37) y
φ(f(x(k)))− φ(x(k)) < 0,∀x 6= 0.
entonces el sistema (4.37) es asintoticamente estable.
Demostracion. Por ser φ una funcion de Lyapunov se tiene φ(x(k)) > 0 y ademas
φ(x(k + 1)) < φ(x(k)), esto quiere decir que la sucesion φ(x(k)) es decreciente y acotada
inferiormente entonces es convergente. Por la continuidad de φ se sigue
lımk→+∞
φ(x(k)) = L
φ
(lım
k→+∞x(k)
)= L.
entonces existe un x∗ ∈ Rn tal que lımk→+∞
x(k) = x∗.
Lema 4.6 ([4]). Sean S, V ∈ Hn+R y ademas S,V > 0 se cumple la siguiente desigualdad
c0(S)
(N∑j=1
n∑i=1
λi(Vj)
)≤ 〈V, S〉 ≤ c1(S)
(N∑j=1
n∑i=1
λi(Vj)
),
donde c0(S) = mın1≤j≤N
(mın
1≤i≤nλi(Sj)
)> 0, c1(S) = max
1≤j≤N
(max1≤i≤n
λi(Sj)
)> 0.
Demostracion. Por el item 3 de la proposicion 1.1 se sigue(mın
1≤i≤nλi(Sj)
)tr(Vj) ≤ tr(SjVj) ≤
(max1≤i≤n
λi(Sj)
)tr(Vj)
c0(S)tr(Vj) ≤ tr(SjVj) ≤ c1(S)tr(Vj)
c0(S)
(n∑i=1
λi(Vj)
)≤ tr(SjVj) ≤ c1(S)
(n∑
1=1
λi(Vj)
)
c0(S)
(N∑j=1
n∑i=1
λi(Vj)
)≤
N∑j=1
tr(SjVj) ≤ c1(S)
(N∑j=1
n∑i=1
λi(Vj)
)
c0(S)
(N∑j=1
n∑i=1
λi(Vj)
)≤ 〈V, S〉 ≤ c1(S)
(N∑j=1
n∑i=1
λi(Vj)
)
Teorema 4.7 ([4]). Las siguientes afirmaciones son equivalentes:
1. El sistema (3.1) es EMC
70

2. El radio espectral de la matriz A1 es menor que uno, es decir, ρ(A1) < 1.
3. Para todo S ∈ Hn+R ,S > 0, existe un unico V ∈ Hn+
R , V > 0 tal que
V − T (V ) = S. (4.38)
4. Para algun V ∈ Hn+R , V > 0, se tiene
V − T (V ) > 0. (4.39)
5. El sistema (3.1) es EXE.
6. El sistema (3.1) es EE.
El resultado es similar si reemplazamos T en (4.38) y (4.39) por L,V o J . La expresion
(4.38) nos da una ecuacion, la cual es llamada ecuacion de Lyapunov y en la expresion
(4.39) nos da una inecuacion, la cual es llamada inecuacion de Lyapunov.
Demostracion. Por los teoremas 4.3 y 4.4 tenemos que 1), 5) y 6) son equivalentes. Por
el teorema 4.1 se tiene que 1) y 2) son equivalentes y por el teorema 4.2 se tiene que 3)
y 6) son equivalentes. Vemos que 3) implica 4) se prueba de forma directa. Entonces nos
concentraremos en demostrar que 4) implica 2).
Consideremos el sistema homogeneo
Y (k + 1) = L(Y (k)), Y (0) ∈ Hn+R , (4.40)
donde Y (k) ∈ Hn+R . Sea la funcion Φ : Hn+
R → R donde se define
Φ(Y ) , 〈V, Y 〉, Y ∈ Hn+R .
Comprobaremos que la funcion Φ es una funcion de Lyapunov.
I) Φ(0) = 〈V T ,0〉 = 0
II) La funcion es continua Φ.
En efecto, sea (Y n) ∈ Hn+R tal que lım
n→∞Y n = Y
Φ(Yn) = 〈V,Yn〉
=N∑i=1
tr(Vi,Yni )
71

lımn→∞
Φ(Yn) =N∑i=1
tr(Vi,Yi)
= 〈V,Y 〉
= Φ(Y ).
III) ∀Y ∈ Hn+R , Y 6= 0 (Y > 0) se tiene que Φ(Y ) > 0.
En efecto como Y > 0 entonces
Φ(Y ) , 〈V,Y 〉
=N∑i=1
tr(Vi,Yi)
=N∑i=1
tr(V12i V
12i Yi)
=N∑i=1
tr(V12i YiV
12i )
> 0
IV) Φ(Y (k + 1))− Φ(Y (k)) < 0. En efecto por el lema 4.6 se tiene
c0(V )
(N∑j=1
n∑i=1
λi(Yj)
)≤ Φ(Y ) ≤ c1(V )
(N∑j=1
n∑i=1
λi(Yj)
)por V − T (V ) = S se obtiene
Φ(Y (k + 1))− Φ(Y (k)) = 〈V, Y (k + 1)〉 − 〈V,Y (k)〉
= 〈V,L(Y (k))〉 − 〈V,Y (k)〉
= 〈T (V ), Y (k)〉 − 〈V,Y (k)〉
= 〈T (V )− V,Y (k)〉
= −〈S,Y (k)〉
≤ −c0(S)
(N∑j=1
n∑i=1
λi(Yj(k))
)< 0
Tenemos que Φ es una funcion de Lyapunov y por el teorema 4.6 para el sistema
(4.40) tenemos que es asintoticamente estable esto implica que ρ(L) = ρ(A1) < 1.
72

Capıtulo 5
CONCLUSIONES
Las conclusiones del presente trabajo son las siguientes:
• Los resultados fundamentales de la teorıa clasica de sistemas lineales sin saltos
pueden ser extendidos para el estudio de los sistemas lineales con saltos markovianos
en particular, la ecuacion de Lyapunov y test de estabilidad, mediante el radio
espectral. A pesar de la dificultad tecnica que ofrece los sistemas con saltos
markovianos, es decir, la aleatoriedad, etc.
• Probamos que los distintos tipos de estabilidad para los sistemas lineales con
saltos markovianos expuestos en este trabajo son equivalentes y estos implican la
estabilidad casi segura. Esto cumple teniendo en cuenta que el espacio de estados
de la cadena de Markov es finita.
• En el caso de sistemas lineales sin saltos se presenta una ecuacion de Lyapunov,
para el caso de sistemas lineales con saltos markovianos se presentan 4 ecuaciones
del tipo Lyapunov.
• Se analiza la estabilidad de los sistemas lineales con saltos markovianos mediante el
radio espectral de cierta matriz que contiene toda la informacion probabılistica de
la cadena de Markov y ademas los parametros del sistema.
73

Bibliografıa
[1] Yuandong Ji. Chizeck Howard. Jump Linear Quadratic Gaussian Control:
Steady-state Solution and Testable Conditions, Control-Theory and Advanced
Technology, vol. 6 No.3, 1990 pp. 289-319.
[2] Feng Xiangbo. Loparo Kenneth. & Yuandong Ji. Chizeck Howard.
Stochastic Stability properties of Jump Linear Systems,IEEE Transactions on
Automatic Control, vol 37 No.1, 1992 pp. 38-53.
[3] Athreya, Krishna B. Measure theory and probability theory Springer, New York,
2010
[4] Costa, Oswaldo Luiz do Valle. Discrete-time Markov jump linear systems
Springer, London, 2005
[5] Fang, Y. Stability analysis of linear control systems with uncertain parameters .
Ph.D. Dissertation, Deparment of Systems, Control, and Industrial Engineering, Case
Western Reserve University, Cleveland, OH. Springer, London, 1998.
[6] Rosenbloom, A. Analysis of linear systems with randomly time-varying parameters,
IRE Convention Record (1955) pp.106.
[7] Bellman, R. Limit theorems for non-commutative operators, Duke Math, Vol 21
(1954) pp.491-500.
[8] D.G. Luemberger and A.Arbel . Singular Dynamic Leontief systems, Econome-
trica, vol 45 No.4, 1977 pp.991-995.
[9] Bharucha, B. ,On the stability of randomly varying systems . Ph.D. Dissertation,
Dept. of Elect. Eng. , Univ. of Calif. , Berkeley, 1961.
74

[10] Chi-Tsong Chen. Linear System Theory Design, Oxford University Press No.3,
1999.
[11] R.W. Newcomb The Semistate Description of Nonlinear Time-Variable Circuits, ,
IEEE Trans. Autom. Control, vol CAS-28 No.1, 1981 pp.62-71.
[12] J. Mills and A. Goldemberg. Force and Position Control of Manipulator During
Constrained Motion Tasks IEEE Trans. Automat. Control, vol 5, No 1, pp. 30-46 1989.
[13] B. L. Stevens and F.L. Lewis . Aircraft Modeling, Dynamics and Control, New
York, Wiley 1991.
[14] H. Zhang, W. S. Gray, and O. R. Gonzalez. Markov Jump-Linear
Performance Models for Recoverable Flight Control Computers, , IEEE Southeastern
Symposium on System Theory, 2004 pp.408-412.
[15] R. Wang, W. S. Gray, O. R. Gonzalez, and J. R. Chavez-Fuentes,
Tracking Performance of Recoverable Distributed Flight Control Systems Subject to
High Intensity Radiated Fields, IEEE Transactions on Aerospace and Electronic
Systems, vol 49, No.1, 2013 pp. 521-542.
[16] I. kats and N. Krasovskii. On the stability of systems with random parameters,
Jounal of Mathematical Systems, Estimation , and Control, vol 24 No.5, 1960 pp.809-
823.
[17] T. Morozan. Stabilization of some stochastic discrete-time control systems, Stoch.
Anal. Appl, vol 1 No.1, 1983 pp.89-116.
[18] R. Krtolica. Stability of linear feedback systems with random communication
delays, Proc. 1991 ACC Boston 1991.
[19] F. Kozin. A survey of stability of stochastic systems , Automatica, vol 5 No.1,
Boston, 1969 pp.95-112.
[20] O. Costa y M. Fragosa. Stability Results for Discrete-Time Linear Systems with
Markovian Jumping Parameters Journal of Mathematical Analysis and Applications
1993.
75

[21] Fang. Loparo. Feng. Stability of discrete time jump linear systems Journal of
Mathematical Analysis and Applications 1993.
[22] R. Horn and C. Johnson Matrix Analysis Cambridge University, New York,
2007.
[23] D. G. Luenberger. Introduction to Dynamic Systems: Theory, Models e Applica-
tions, John Wiley e Sons, 1979.
[24] I.Ojeda y J. Gago Metodos matematicos para estadıstica 2008.
[25] Mayta G. Jorge. Regularidad y Estabilidad de Sistemas Lineales con Saltos Mar-
kovianos en Tiempo Discreto. Tesis M.S, Dpto. Matematica, Pontificia Universidad
Catolica del Peru, Lima, Peru 2015.
76