Embed Size (px)
DESCRIPTION
Terjemahan dari buku Dynamics of Structure, Anil K. Chopra. Penerjemahan tidak bertanggung jawab pada kebenaran isinya karena ini hanya untuk tujuan perkuliahan.
Citation preview

Terjemahan
DYNAMICS OF STRUCTURES
Karangan ANIL K. CHOPRA
Hal. 61 s/d 112
Oleh :
SARWO EDHI , ST
1409200060009
PROGRAM MAGISTER TEKNIK SIPIL, UNSYIAH 2014

2
GETARAN BEBAS
PENDAHULUAN
Pada bab ini akan membahas permasalahan mengenai getaran bebas yang terjadi pada
suatu struktur. Getaran bebas ini terjadi karena adanya suatu paksaan seperti pergerakan
akibat adanya gempa sehingga menyebabkan terjadinya kehilangan kesetimbangan
pada struktur. Ada beberapa macam pendekatan yang bisa dilakukan untuk menghitung
getaran bebas ini yaitu berupa pendekatan terhadap frekuensi getaran bebasnya dan
rasio redaman sistem derajat kebebasan tunggal ( Single Degree of Freedom/SDF).
Selanjutnya akan dilihat juga laju pergerakan kerusakan struktur pada getaran bebas
yang dikontrol oleh rasio redaman yang mana hasil analisisnya akan menghasilkan nilai
getaran bebas sebagai acuan untuk menghitung frekuensi alami dan rasio redaman pada
struktur.
1. Getaran bebas nir-redaman
Sistem SDF linier digambarkan seperti sebuah rangka portal sederhana dimana mencari
gaya p (t) telah dibahas pada bab 1. Ketika p(t) = 0 maka terjadi perubahan diferensial
untuk sistem getaran bebas dimana saat nilai redaman = 0 maka rumusnya adalah
Getaran bebas merupakan getaran yang terjadi karena adanya gangguan pada sistem
kesetimbangan struktur yang kaku. Nilai perpindahan jarak u diberikan 0 dan nilai
kecepatan (U)= 0 membuat persamaan baru sebagai solusi untuk mencari persamaan
diferensial yang homogen yaitu
( ) ( ) ( )
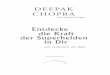
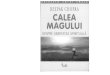
Rumus diatas selanjutnya diplot pada gambar 1 dan didapatkan gambaran bahwa posisi
kesetimbangan statis struktur didapatkan ketika sistem mengalami pergerakan akibat
getaran yang dimana pergerakan ini berulang setiap 2 π/ωn detik. Pergerakan ini
selanjutnya dikenal sebagai pergerakan harmonik sederhana. Kurva perpindahan
terhadap waktu pada gambar 1 memperlihatkan satu putaran siklus suatu sistem struktur
pada saat terjadinya getaran bebas dengan a-b-c-d-e sebagai parameternya. Pada Saat
kesetimbangan statis berada pada titik a, struktur bergerak ke kanan mencapai
perpindahan maksimum u0 di titik b. Pada saat waktu kecepatan 0 dan perpindahan
menjadi lambat, struktur kembali ke titik kesetimbangannya di titik c dan kemudian
bergerak kekiri lagi mencapai perpindahan minimum –u0 di titik d kemudian melambat
dan mencapai kesetimbangan statis kembali pada titik e. Pada saat kembali ke titik e
setelah melewati 2 π/ωn detik dari titik a, maka siklus perpindahan dan waktu terhadap
getaran bebas dimulai dari awal kembali.

3
Gambar 1. Sistem getaran bebas tanpa redaman
Paramater waktu yang dibutuhkan pada sistem yang tidak teredam ini untuk
menyelesaikan satu putaran dari getaran bebas ini adalah periode alami terhadap
getaran yang terjadi pada struktur yang disimbolkan sebagai Tn dengan satuannya
berupa detik. Nilai Tn sendiri sangat berhubungan dengan nilai frekuensi putaran alami
terhadap getaran ωn dengan satuannya berupa radian/detik. Rumus yang digunakan
untuk menghitung Tn adalah :
Frekuensi yang berhubungan dengan putaran alami disimbolkan dengan fn dimana
sistem membutuhkan 1/ Tn putaran dalam 1 detik. Rumus yang dapat digunakan adalah
Hubungan yang terjadi antara nilai fn dan ωn disebut dengan nilai frekuensi alami
terhadap getaran. Rumus yang digunakan adalah :
Nilai-nilai dari Tn, fn dan ωn ini hanya tergantung dari nilai massa dan kekakuan
dari struktur itu sendiri. Pada saat kekakuan yang terjadi pada dua sistem SDF dan
mempunyai massa yang sama akan mempunyai nilai frekuensi alamai yang sangat
tinggi dan juga menghasilkan periode alami yang sangat singkat, tetapi saat struktur
mempunyai massa yang semakin berat akan mengalami frekuensi alami yang pendek
dan periode alami yang panjang. Ini merupakan salah satu bukti ketika bangunan
memiliki getaran bebas tanpa ada faktor eksternal yang mendukung. Rumus yang juga
dapat digunakan untuk menentukan nilai-nilai dari sirkular frekuensi alami (ωn),
frekuensi siklik alami fn, periode alami Tn adalah :
√
√
√

4
Dimana δst = mg/k. g adalah percepatan gravitasi, m adalah massa dan k merupakan
kekakuan. Disaat kondisi portal satu lantai maka δst merupakan perpindahan lateral
terhadap massa dan gaya yang terjadi pada struktur.
Pada sistem yang tidak teredam juga mengalami gerakan amplitudo yaitu perpindahan
bolak-balik saat terjadi getaran bebas ke arah u0 maksimum dan –u0 minimum. Rumus
yang dapat digunakan adalah :
√ ( ) ( ( )
)
Nilai u0 ini bergantung pada kecepatan dan perpindahan yang terjadi pada struktur
dengan gerakan yang terjadi pada struktur tidak sampai mengalami kehancuran.
Frekuensi alami yang terjadi pada portal satu lantai dengan massa m dan kolom terjepit
pada dasarnya dapat dihitung dengan rumus :
√
Dimana ρ=Ib/4Ic. Disaat kondisi balok kaku maka ρ=∞ dan ketika balok tanpa kekakuan
ρ=0. Kekakuan lateral dapat dihitung dengan:
∑
balok kaku
∑
balok tanpa kekakuan
Dengan frekuensi alaminya seperti rumus dibawah. Jika kolom sendi pada dasar dan
balok kaku maka nilai √
( ) √
balok kaku
( ) √
balok tanpa kekakuan
Contoh :
1. tentukan frekuensi putaran alami, frekuensi siklik alami, dan periode alami terhadap
getaran pada: a) arah utara-selatan dan b) arah timur-barat dengan gambar seperti di
bawah ini

5
Jawaban :
a) arah utara-selatan
(
) (
( )( )
( )
dimana sudah ditentukan
( ) √
( )
( )
b) arah timur-barat
√
( )
( )
karena ada dua tulangan jepit melintang
( ) √
( )
( )
Dari perhitungan dapat dilihat bahwa frekuensi alami lebih besar daripada periode
alami pada arah timur barat. Ini dikarenakan adanya tulangan vertikal yang
memberikan kekakuan lebih besar walaupun pada kolom terjadi bengkok tapi getaran
yang terjadi sama pada kedua arah struktur.
2. Getaran bebas dengan redaman viskos
Untuk mencari nilai dari koefisien redaman kritis (ccr) menggunakan rumus :
√

6
Sedangkan untuk mencari nilai dari rasio redaman (Ϛ) menggunakan rumus :
Nilai parameter redaman konstan (c) merupakan ukuran nilai dari energi yang
mengganggu struktur pada siklus getaran bebas sehingga nilai ini perlu diperhitungkan.
Selain itu, rasio redaman merupakan parameter yang bergantung dari massa dan
kekakuan struktur.
2.1 Tipe-tipe gerakan
Ada beberapa tipe gerakan u(t) pada struktur jika perpindahan sebesar u(0) terhadap
nilai rasio redaman.
Jika c=ccr / Ϛ=1, maka sistem akan kembali ke posisi setimbang tanpa adanya
goyangan.
Jika c>ccr / Ϛ>1, maka sistem juga akan kembali ke posisi setimbang secara
perlahan tanpa adanya goyangan .
Jika c<ccr / Ϛ<1, maka sistem akan bergoyang dan akan kembali ke posisi
setimbang dengan amplitudo yang semakin menurun.
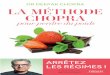
Pada gambar 2 dapat dilihat lebih jelas bagaimana sistem ini bekerja. Ccr
merupakan
Gambar 2 . Getaran bebas ketika redaman kecil, redaman kritis, sangat teredam
koefisien redaman kritis karena merupakan nilai terkecil dari parameter c yang
menghambat terjadinya goyangan yang sempurna sehingga menjadi pemisah antara
gerakan yang bergoyang dan tidak bergoyang.
2.2 Sistem-sistem yang berada pada redaman kecil
Ketika struktur berada pada redaman kecil, maka untuk mencari nilai gerakan u(t)
menggunakan rumus :
( ) Ϛω ( ( ) ω ( Ϛω ( )
) )
√ Ϛ
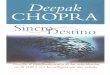
Persamaan diatas selanjutnya diplot pada gambar 4. Dapat dilihat bahwa pada gambar
menunjukkan respon getaran bebas pada sistem SDF dengan rasio redaman Ϛ = 0.05
atau 5 % dan juga sebagai perbandingan respon getaran bebas dengan sistem yang sama
tapi tanpa adanya redaman seperti pada gambar 3 Setelah di plot dengan parameter
perpindahan u(0) dan kecepatan ( ) pada t=0 dengan koordinat dan kemiringan yang
sama dengan gambar , didapatkan frekuensi alami pada getaran yang teredam adalah
ωD dengan rumus seperti diatas. Perhitungan mencari periode alami pada getaran yang
teredam berhubungan denga nilai periode alami Tn sehingga dapat digunakan rumus :

7
√
Gambar 3 Efek Redaman Pada Getaran Bebas
Perpindahan amplitudo pada sistem yang tidak teredam adalah sama untuk semua
siklus getaran. Tetapi pada sistem teredam yang bergoyang maka amplitudo akan turun
secara perlahan di setiap putaran. Kerusakan akibat perpindahan amplitudo akan
meluruh secara eksoponen terhadap waktu. Nilai ±ρe- Ϛωnt
pada gambar menyentuh
garis perpindahan-waktu pada titik-titik puncak dimana :
√( ( ) ( ) ( )
)
Efek dari redaman ini memberikan frekuensi alami yang lebih rendah dari ωn
menjadi ωD dan periode alaminya juga bertambah panjang dari Tn menjadi TD . Ketika
laju dari rasio redaman dibawah 20 % seperti pada gambar 4 ,maka efek redaman ini
bisa dihilangkan.
Gambar 4 Dampak redaman terhadap frekuensi alami
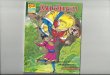
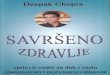
Selain itu, efek lain yang penting untuk ditinjau dari redaman ini adalah keruntuhan
akibat getaran bebas. Pada gambar 5dapat dilihat bagaimana getaran bebas yang terjadi
ketika diplot pada 4 sistem periode alami yang sama (Tn), tetapi dengan rasio redaman
( ) yang berbeda-beda dengan nilai sebesar 2, 5, 10, dan 20 %. Gambar 5 menunjukkan
bahwa semakin kecil nilai redaman, semakin besar getaran bebas yang terjadi.

8
Gambar 5 Getaran bebas dengan empat tingkatan redaman
2.3 Kerusakan yang terjadi terhadap gerakan struktur
Di bagian ini akan dibahas mengenai rasio antara dua puncak berturut-turut pada
redaman getaran bebas dan rasio redaman struktur. Rumus rasio yang dapat digunakan
adalah :
( )
( ( ) (
√ )
Selain itu jika pada perhitungan diberikan rasio pada puncak yang berturut-
turut dikarenakan terpisah oleh TD dengan menggunakan rumus :
(
√ )
Logaritma alami yang biasa disebut juga pengurangan logaritma disimbolkan (δ) dapat
dihitung dengan rumus :
√
Jika nilai kecil pada perhitungan dimana √ , dapat dihitung dengan
persamaan kira-kira yaitu :
Pada gambar.. dapat dilihat bagaimana hubungan antara nilai pasti dan perkiraan antara
dan . Rumus dapat digunakan ketika nilai yang mana itu dimiliki oleh
hampir kebanyakan struktur.
Gambar 6 Hubungan antara pengurangan logaritma dan rasio redaman pada nilai pasti
dan kira-kira

9
Ketika keruntuhan terjadi secara perlahan maka agak sulit jika harus menggabungkan
puncak yang berturut-turut dikarenakan terpisah menuju rasio redaman. Sehingga nilai
dapat dihitung dengan rumus :
Nilai j adalah siklus yang berlebih dikarenakan penurunan gerakan bangunan dari u1
menuju uj+1.
Untuk menentukan berapa banyak siklus yang hilang selama 50 % pengurangan akibat
perpindahan amplitudo dapat dihitung dengan rumus :
Nilai dari persamaan diatas dapat dilihat pada gambar 7
Gambar 7 Nilai siklus yang diperlukan untuk mengurangi amplitude getaran bebas
sebesar 50%
2.4 Percobaan getaran bebas
Pada kenyataannya, sangat sulit untuk menentukan secara pasti nilai rasio redaman
pada struktur yang praktis hanya secara analisis sehingga perlu dilakukan percobaan.
Percobaan getaran bebas merupakan salah satu cara untuk menentukan redaman yang
dibutuhkan. Untuk sistem yang ringan teredam, nilai redaman dapat dihitung dengan
persamaan :
atau
Persamaan pertama didapatkan dari turunan perpindahan u(t). Sedangkan untuk
persamaan kedua dihitung dengan menggunakan parameter percepatan yang mana lebih
mudah diukur daripada perpindahan.
Untuk nilai periode alami (TD), dapat ditentukan dari rekaman getaran bebas yang
diukur dari waktu yang dibutuhkan untuk menyelesaikan satu putaran getaran.
Selanjutnya dicari juga nilai periode alami dari perhitungan kekuatan dan massa untuk
sebuah sistem yang ideal. Perbandingan antara nilai periode alami yang ditentukan
dengan dua metode dapat menghasilkan berapa akuratnya perhitungan yang kita

10
dapatkan dan juga dapat diketahui bagaimana kondisi struktur yang baik untuk
direncanakan.
Contoh :
1) Tentukan periode getaran alami dan rasio redaman pada rangka plexiglass seperti
pada gambar dari rekaman percepatan getaran bebas
Jawab :
Data puncak pada akselerasi dan lamanya waktu terjadi getaran bebas dapat
diperoleh dari data selama percobaan dilakukan dengan menggunakan komputer. Data-
data yang diperoleh adalah :
Puncak Waktu Puncak, ( )
1 1.110 0.915
11 3.844 0.076
( )
atau
3. Energi pada getaran bebas
Input energi pada suatu sistem SDF dengan parameter perpindahan u(0) dan kecepatan
( ) menghasilkan suatu persamaan yaitu :
( ( ))
( ( ))
Total energi yang dibutuhkan adalah dengan menggunakan persamaan :
( ) ( )
( ( ))
( ( ))
Nilai energi total ini merupakan energi yang dibuat berdasarkan energi kinetik Ek untuk
massanya dan energi potensial Ep sebagai tegangan deformasi pada struktur.
Untuk sistem redaman viskos, total energi ini akan berfungsi untuk menurunkan fungsi
waktu yang disebabkan energi yang mengganggu pada redaman viskos dengan durasi
waktu 0-t1 adalah dengan persamaan :
Rangka Plexiglass Rekaman Percepatan Getaran Bebas

11
∫ ( ) ∫ ∫
4. Getaran bebas dengan redaman Coulomb
Analisis redaman coulomb merupakan suatu analisis yang didapatkan dari
gesekan dan tergelincir dari dua permukaan kering sistem. Persamaan gaya gesekan
, dimana adalah koefisien gesekan statis dan kinetis dan N adalah gaya
normal antara permukaan tergelincir. Arah dari gaya gesek melawan dari gerakan yang
diberikan pada suatu massa dan tanda gaya gesek ini akan berubah ketika arah
gerakannya juga diubah. Sehingga terdapat dua rumus dan solusi untuk benda ketika
bergerak ke satu arah dan ketika bergerak berlawanan. Gerakan yang terjadi dapat
dilihat pada gambar 8.
Gambar 8 Arah gerakan dan reaksinya
Ketika struktur bergerak dari kiri ke kanan, maka persamaan perpindahan yang
dapat digunakan adalah :
( )
Ketika struktur bergerak dari kanan ke kiri, maka persamaan perpindahan yang
dapat digunakan adalah :
( )
Untuk nilai A1, A2, B1, B2 sama-sama menggunakan persamaan √
begitu juga nilai . Disaat kondisi t=0, maka kondisi massa yang mulai bergerak ke
arah kanan setengah putaran dengan perpindahan u(0) akan mempunyai kecepatan
( ) dan persamaan yang dapat digunakan adalah :
( ) ( ( ) )
Persamaan ini bisa digunakan sampai kecepatan massa menjadi 0 kembali pada
; pada kondisi ( ) . Ketika massa bergerak secara ekstrim dari
kiri ke kanan, maka persamaan yang dapat digunakan adalah :
( ) ( ( ) )
Persamaan ini bisa digunakan sampai kecepatan massa menjadi 0 kembali pada
; pada kondisi ( ) yang mana setelah digabung dengan
paramter A1 dan B1 menjadi persamaan :
( ) ( ( ) )

12
Waktu yang dibutuhkan untuk setengah putaran adalah
dan periode alami getaran
untuk durasi satu putaran penuh adalah
Pada setiap gerakan pada putaran, amplitudo berkurang sebesar yang mana
perpindahan pada titik maksimum secara berturut-turut menggunakan
persamaan :
Getaran bebas pada sistem gesekan Coloumb akan berhenti ketika mencapai titik akhir
di setiap setengah putaran yang mana amplitudo lebih kecil dari nilai uf. Redaman di
struktur yang sebenarnya pasti terjadi gesekan Coulomb ini karena gesekan ini hanya
bisa berhenti pada saat getaran bebas. Jika redaman bersifat viskos, maka secara teori
akan terus berlanjut walaupun dalam amplitudo yang kecil.
Contoh :
1) sebuah bangunan mempunyai 4 rangka baja dilengkapi dengan sebuah peralatan
gesekan didukung oleh lapisan beton seperti pada gambar di soal. Gaya normal yang
melintang pada massa dan beban gesekan adalah 2.5 % terhadap beban lapisan.
Rekaman gerakan bangunan pada getaran bebas dapat dilihat pada gambar di soal.
Tentukan koefisien efektif terhadap getaran.
Jawab :
a) asumsikan berat frame tidak perlu dibandingkan dengan lapisan beton. Energi yang
mengganggu yang disebabkan oleh gesekan tidak diperlukan. Asumsi ini karena
amplitudo gerakan keruntuhan adalah linier terhadap waktu.
b) menentukan Tn dan uf

13
c) menentukan koefisien gesekan. Total gesekan pada arah lateral yang disebabkan oleh
4 rangka yang terjepit, dua di setiap 2 rangka adalah :
( ) ( ) (
)
( )

14
3
RESPON TERHADAP GETARAN
HARMONIK DAN BERKALA
Latar Belakang
Respon sistem SDF getaran harmonik adalah topik klasik dalam dinamika struktur,
bukan hanya karena getaran tersebut ditemui dalam rekayasa sistem (misalnya gaya
karena mesin berputar tidak seimbang), tetapi juga karena memahami respon struktur
untuk getaran harmonik memberikan wawasan bagaimana sistem akan merespon jenis
gaya. Selanjutnya, teori gaya getaran harmonik memiliki beberapa aplikasi yang
berguna dalam rekayasa gempa.
Pada bagian A dari bab ini, hasil dasar respon sistem SDF untuk gaya harmonik
telah dipaparkan, termasuk konsep respon keadaan tetap, kurva frekuensi-respon, dan
resonansi. Penerapan hasil ini untuk evaluasi eksperimental frekuensi getaran alami dan
rasio redaman struktur, untuk isolasi getaran, dan desain instrumen getaran-ukur adalah
subjek dari Bagian B; juga termasuk konsep redaman viskos setara. Konsep ini
digunakan dalam Bagian C untuk mendapatkan hasil perkiraan untuk respon sistem
dengan redaman tingkat-independen atau gesekan Coulomb; Hasil ini kemudian
terbukti merupakan perkiraan yang baik sebagai solusi yang "tepat". Prosedur untuk
menentukan respon sistem SDF getaran periodik disajikan di Bagian D. Rangkaian
representasi getaran Fourier, dikombinasikan dengan hasil untuk menanggapi getaran
harmonik, menyediakan prosedur yang diinginkan.
BAGIAN A: SISTEM REDAMAN VISKOS : HASIL SEDERHANA
3.1 GETARAN HARMONIK SISTEM TANPA REDAMAN
Sebuah gaya harmonik adalah ( ) atau di mana po adalah
amplitudo atau nilai maksimum dari gaya dan frekuensi ω disebut frekuensi tarik atau
frekuensi paksa. Respon sistem SDF untuk gaya sinusoidal akan dipaparkan secara
detail, bersama dengan penjelasan singkat pada respon terhadap gaya kosinus, karena
kedua kasus tersebut memiliki konsep yang sama.
Pengaturan ( ) pada Pers. (1.5.2) merupakan persamaan
diferensial yang mengatur gaya getaran harmonik dari sistem, untuk sistem tanpa
redaman menggunakan persamaan berikut
mȕ + ku = po sin ωt
(3.1.1)
Persamaan ini harus dipecahkan untuk perpindahan atau deformasi subjek u(t) ke
kondisi awal

15
u = u(0) ȕ = ȕ(0)
(3.1.2)
dimana u(0) dan ȕ(0) adalah perpindahan dan kecepatan pada saat gaya diterapkan.
Penyelesaian khusus untuk persamaan diferensial ini adalah (lihat Penurunan 3.1)
( )
( ⁄ )
(3.1.3)
Penyelesaian komplementer persamaan. (3.1.1) adalah respon getaran bebas yang
ditentukan dalam Pers. (d) dari Penurunan 2.1
( )
(3.1.4)
dan penyelesaian (solusi) lengkapnya adalah penjumlahan dari solusi komplementer
dan khusus.
( )
( ⁄ )
(3.1.5)
Konstanta A dan B ditentukan dengan menerapkan kondisi awal, Persamaan. (3.1.2),
untuk mendapatkan hasil akhir (lihat Penurunan 3.1)
[transient (sementara)]
[keadaan tetap (3.1.6a)
Persamaan (3.1.6a) telah diplot (digambarkan) untuk ω/ωn = 0.2, u(0) = 0, dan ȕ(0) =
ωnpo/k sebagai garis tebal pada Gambar. 3.1.1. istilah sin ωt dalam persamaan ini
adalah penyelesaian khusus pada Persamaan. (3.1.3) dan ditunjukkan oleh garis putus-
putus.

16
Gambar 3.1.1 (a) Gaya harmonic; (b) respon terhadap system tanpa redaman
pada gaya harmonic ω/ωn = 0.2, u(0) = 0 dan ȕ(0) = ωnpo/k.
Persamaan (3.1.6a) dan Gambar. 3.1.1 menunjukkan bahwa u(t) terdiri dari dua
komponen getaran yang berbeda: (1) istilah sin ωt, yaitu memberikan osilasi
(goyangan) pada frekuensi gaya (paksa) atau tarik, dan (2) istilah sin ωnt dan cos ωnt,
yaitu memberikan osilasi pada frekuensi alami dari sistem. Yang pertama dari kedua
hal ini adalah gaya getaran atau gaya keadaan tetap, untuk itu hadir karena gaya yang
diterapkan tidak dipengaruhi oleh kondisi awalnya. Yang terakhir adalah getaran
sementara, yang tergantung pada perpindahan awal dan kecepatan. Hal ini terjadi
bahkan jika u(0) = ȕ(0) = 0, dalam hal Persamaan. (3.1.6a) disederhanakan menjadi
( )
( ⁄ ) ( )
(3.1.6b)
Komponen transien ditunjukkan sebagai perbedaan antara garis tebal dan putus-putus
pada Gambar. 3.1.1, di mana ia terlihat terus tersambung selamanya. Ini hanya titik
akademik saja, karena sebenarnya redaman pasti hadir dalam sistem nyata, yang
membuat getaran bebas mengalami peluruhan oleh waktu (bagian 3.2). oleh karena
itulah komponen ini disebut dengan getaran sementara.
Respon dinamik kondisi tetap, yaitu osilasi sinusoidal pada frekuensi gaya,
dapat dinyatakan sebagai
( ) ( ) [
.
/ ]
(3.1.7)

17
Dengan mengabaikan efek dinamis yang ditandai dengan istilah percepatan dalam Pers.
(3.1.1), akan memberikan perubahan bentuk statis (ditunjukkan dengan tanda "st") pada
setiap saat
( )
(3.1.8)
Nilai maksimum dari perubahan bentuk statis adalah;
( )
(3.1.9)
yang dapat diartikan sebagai deformasi statis karena gaya amplitudo po; untuk lebih
singkatnya kita akan mengacu pada (ust)o sebagai deformasi statis. Faktor dalam tanda
kurung pada Pers. (3.1.7) telah diplot pada Gambar 3.1.2 terhadap ω/ωn, yaitu rasio
frekuensi gaya dengan frekuensi alami. Untuk ω/ωn < 1 atau ω < ωn , faktor ini positif,
menunjukkan bahwa u(t) dan p(t) memiliki tanda aljabar yang sama (yaitu, ketika gaya
pada Gambar. 1.2.1a bergeser ke kanan, sistem juga akan bergeser ke kanan).
Perpindahan dikatakan berada dalam fase dengan gaya yang diterapkan. Untuk ω/ωn >
1 atau ω > ωn faktor ini negatif, menunjukkan bahwa u(t) dan p(t) memiliki tanda-tanda
aljabar yang berlawanan (yaitu, ketika gaya berpindah ke kanan, sistem akan
dipindahkan ke kiri) . Perpindahan dikatakan keluar dari fase relatif terhadap gaya yang
diberikan.
GAMBAR 3.1.2
Untuk menggambarkan konsep fase ini secara matematis, Persamaan. (3.1.7) ditulis
ulang dengan amplitudo uo, perpindahan getaran u(t) dan sudut fase ɸ:
( ) ( ) ( ) ( )
(3.1.10)
Dimana

18
( )
| ( ⁄ ) | dan {
(3.1.11)
Untuk ω < ωn, ɸ = 0, menunjukkan bahwa variasi perpindahan sebagai sin ωt, dalam
fase dengan gaya yang diterapkan. Untuk ω > ωn, ɸ = 180, menunjukkan bahwa variasi
perpindahan sebagai -sin ωt, keluar dari fase relatif terhadap gaya. Sudut fase ini
ditunjukkan pada Gambar. 3.1.3 sebagai fungsi dari rasio frekuensi ω /ωn.
Deformasi (atau perpindahan) faktor respon Rd memberikan rasio amplitudo uo
pada perubahan bentuk getaran deformasi statis (ust)o karena gaya po. Gambar 3.1.3,
yang menunjukkan persamaan. (3.1.11a) untuk Rd diplot (digambar) sebagai fungsi dari
rasio frekuensi ω /ωn, mungkin memerlukan beberapa pengamatan: jika ω /ωn kecil
(yaitu, gaya adalah "perlahan-lahan bervariasi"), Rd hanya sedikit lebih besar dari 1 dan
amplitudo dari perubahan bentuk getaran pada dasarnya sama dengan deformasi statis.
Jika ω /ωn > √ (yaitu, ω lebih tinggi dari ωn √ ), Rd < 1 dan amplitudo deformasi
kurang dari deformasi statis. Apabila ω /ωn meningkat di luar √ , maka Rd menjadi
lebih kecil dan mendekati nol sebagai ω/ωn ∞, menunjukkan bahwa deformasi
getaran terhadap gaya yang "bervariasi dengan cepat" sangatlah kecil. Jika ω/ωn
mendekati 1 (yaitu, ω dekat dengan ωn), maka Rd adalah berkali-kali lebih besar dari 1,
hal ini menunjukkan bahwa amplitudo deformasi jauh lebih besar daripada perubahan
bentuk statis.
Frekuensi resonansi didefinisikan sebagai frekuensi gaya di mana Rd adalah
maksimum. Untuk sistem tanpa redam, frekuensi resonansi nya ωn dan Rd adalah tak
terbatas pada frekuensi ini. Deformasi getaran tidak menjadi tak terbatas secara scepat,
namun secara bertahap, seperti yang akan kita tunjukkan selanjutnya
Jika ω = ωn, solusi yang diberikan oleh Persamaan. (3.1.6b) tidak berlaku lagi.
Dalam hal ini pilihan fungsi C sin ωt untuk solusi tertentu gagal, karena itu juga
merupakan bagian dari solusi komplementer. Solusi khusus sekarang adalah
( )
(3.1.12)
Dan solusi lengkap untuk di kondisi awal istirahat, u(0) = u(0) = 0, adalah (lihat
Penurunan 3.2)
( )
(
(3.1.13a)
Atau
(3.1.13b)
Hasil ini diplot pada Gambar. 3.1.4, yang menunjukkan bahwa waktu yang dibutuhkan
untuk menyelesaikan satu siklus getaran adalah Tn. Dalam setiap siklus deformasi
amplitudo meningkat sebanyak

19
GAMBAR 3.1.4 respon system tanpa redaman terhadap frekuensi gaya
sinusoidal ω = ωn ; u(0) = ȕ(0) = 0
Bentang ayunan deformasi terjadi untuk jangka waktu tak tentu, tetapi ini menjadi
tidak terbatas hanya setelah suatu infinitely yang lama.
Ini adalah hasil secara akademis dan harus ditafsirkan dengan pantas pada struktur
sebenarnya. Sebagai deformasi untuk melanjutkan pertambahan ayunan, pada beberapa poin
waktu, system ini akan gagal jika deformasi rapuh. Dalam kasus lainnya, system akan
mengalah jika ini adalah pembuluh, kekakuannya akan menurun, dan ini “frekuensi alami”
yang tidak lama dan menjadi seimbang untuk menguatkan frekuensi, dan Pers. (3.1.13) atau
Fig. 3.1.4 akan menjadi valid.
Penurunan Persamaan 3.1
Solusi untuk Pers. (3.1.1), sebuah liner kedua – menjadi persamaan :
up(t) = C sin ωt (a)
Diferensial kedua kali menjadi :
ṻp(t) = -ω2 C sin ωt (b)
Substitusikan Pers. (a) dan (b) ke dalam persamaan diferensial (3.1.1) menuju solusi
untuk C :
(c)
Yang mana digabungkan dengan Pers. (a) menghasilkan solusi khusus yang
ditampilkan pada Pers. (3.1.3).
Untuk menentukan konstanta A dan B dalam Pers. (3.1.5), Ini
diferensialnya/perbedaannya :

20
(d)
Evaluasi Pers. (3.1.5) dan (d) di t = 0 memberikan :
(e)
Dua persamaan ini memberikan :
(f)
Yang mana di substitusikan ke dalam Pers. (3.1.5) untuk mendapatkan Pers. (3.1.16a)
Derivasi 3.2
Jika ω = ωn , solusi khusus untuk Pers. (3.1.1) adalah bentuk :
(a)
Substitusikan Pers. (a) dalam Pers. (3.1.1) dan pemecahan untuk C menjadi
(b)
Yang mana digabungkan dengan Pers. (a) untuk mendapatkan solusi Pers. (3.1.12).
Hingga solusi totalnya adalah :
(c)
Dan penyesuaian kecepatannya adalah :
(d)
Evaluasi Pers. (c) dan (d) pada t = 0 dan memecahkan persamaan hasil aljabar yaitu :
Perkhusus pada kondisi awal menjadi :

21
Yang mana di substitusikan dalam Pers. (c) untuk mendapatkan Pers. (3.1.13a)
3.2 GETARAN HARMONI DENGAN REDAMAN VISKOS
3.2.1 Kondisi Tetap dan Respon Tidak Tetap
Termasuk redaman viskos persamaan diferensial memerintahkan respon pada system SDF
untuk menguatkan harmoni adalah
(3.2.1)
Persamaan ini untuk memecahkan subjek pada kondisi awal
(3.2.2)
Solusi khusus untuk persamaan diferensial ini adalah (dari Derivasi 3.3) :
(3.2.3)
Dimana :
(3.2.4)
Yang melengkapi solusi pada Pers. (3.2.1) adalah respon getaran bebas yang diberikan oleh
Pers. (f) pada Derivasi 2.2 :
(3.2.5)
Dimana konstanta A dan B dapat ditentukan oleh prosedur standar (contoh, lihat Derivasi 3.1)
dalam bentuk displacement awal u(0) dan kecepatan awal u(0). Pers. (3.2.5) diplot kedalam Fig.
3.2.1 untuk ω/ωn = 0,2. ζ = 0,05, u(0) = 0, dan u(0) = ωnpo / k ;
Total respon ditunjukkan oleh garis utuh dan respon kondisi tetap oleh garis putus-putus.
Perbedaan keduanya adalah respon tidak tetap (transient response), yang mana kerusakan
eksponen dengan waktu pada sebuah rata-rata tergantung pada ω/ωn dan ζ . Setelah sesaat,
pada dasarnya kekuatan respon tersisa, dan oleh karena itu kita menyebutnya respon keadaan
tetap dan focus pada sisa chapter ini (setelah section 3.2.2). Ini harus diakui, bagaimanapun
puncak deformasi terbesar dapat terjadi sebelum sisem steady-state tercapai ; lihat Fig. 3.2.1.

22
Penurunan Rumus 3.3
Bagikan Pers. (3.2.1) oleh m memberikan :
(a)
Solusi khusus untuk Pers. (a) adalah bentuk :
(b)
Substitusikan Pers. (b) dan ini pertama dan kedua derivatifkan ke dalam Pers. (a)
memberikan :
(c)
Untuk Pers. (c) harus valid untuk semua t , koefisien pada bentuk sinus dan cosinus pada
dua sisi dalam persamaan harus sama. Syarat ini memberikan dua persamaan pada C dan D
yang mana setelah pembagi oleh ωn² dan menggunakan hubungan k = ωn²m, menjadi :
(d)

23
(e)
Pemecahan dua persamaan aljabar (d) dan (e) menuju Pers. (3.2.4).
3.2.2 Respon untuk ω = ωn
Pada section ini kita mengulang peraturan pada damping dalam penilaian yang mana
respon steady-state tercapai dan dalam batas respon magnitudo ini ketika frekuensi menguat
sama dengan frekuensi alami. Untuk ω = ωn , Pers. (3.2.4) memberikan C = 0 dan D = - (ust)o /
2ζ ; untuk ω = ωn dan kondisi awal nol ; kondisi A dan B dalam Pers. (3.2.5) dapat ditunjukkan
: A = (ust)o / 2ζ dan B = (ust)o / 2 √(1 - ζ²). Dengan solusi ini untuk A, B, C dan D, Pers.
(3.2.5) menjadi :
(3.2.6)
Hasil ini di plot dalam Fig. 3.2.2 untuk system dengan ζ = 0,05. Perbandingan pada Fig. 3.2.2
untuk system damped dan Fig. 3.1.4 untuk system undamped menunjukkan damping lebih
rendah tiap puncak dan batas respon untuk nilai batas :
(3.2.7)
Untuk system damped yang ringan bentuk sinus dalam Pers. (3.2.6) adalh kecil dan ωD ≈ ωn ;
sehingga :
(3.2.8)
Ragam deformasi dengan waktu sebagai funsi cosinus, dengan peningkatan amplitude dengan
waktu berdasarkan fungsi envelope ditunjukkan pada garis putus-putus pada Fig. 3.2.2.
Amplitudo pada deformasi steady-state pada sebuah system untuk kekuatan harmoni
dengan ω = ωn dan nilai steady-state tercapai dengan kuat dipengaruhi oleh damping. Pengaruh
yang penting pada rasio damping pada amplitude terlihat pada Fig. 3.2.3, dimana :

24
Pers. (3.2.6) di plot untuk tiga rasio redaman : ζ = 0,01 dan 0,1. Untuk mempelajari bagaimana
respon membangun untuk kondisi tetap, kita mengulang puncak uj setelah j melingkari getaran.
Hubungan antara uj dan j dapat ditulis oleh substitusi t = jTn dalam pers. (3.2.8), mengatur
cos ωnt = , dan menggunakan pers. (3.2.7) untuk mencapai :
(3.2.9)
Hubungan ini di plot ke dalam Fig. 3.2.4 untuk ζ = 0.01, 0.02, 0.05, 0.10 dan 0.20. Poin yang
memiliki ciri tersendiri ini terhubung oleh kurva untuk mengenal kecendrungan, tapi hanya
nilai bilangan pada j sangat berarti.

25
Semakin kecil getaran, semakin besar nilai siklus yang dibutuhkan untuk mencapai
Persentase tertentu dari uo, amplitudo keadaan tetap. Untuk contoh, nilai siklus yang
dibutuhkan mencapai 95% dari uo adalah 48 untuk ζ = 0.01, 24 untuk ζ = 0.02, 10 untuk
= 0.05, 5 untuk ζ = 0.10, dan 2 untuk ζ = 0.20.
3.2.3 Deformasi Maksimum dan Tahap Perlambatan
Deformasi keadaan tetap dari sistem ke gaya gelombang, dideskripsikan dengan rumus
(3.2.3) dan (3.2.4) dapat dituliskan sebagai berikut
Pers. (3.2.10) dimasukkan dalam Gambar 3.2.5 untuk 3 nilai dari ω/ωn dan sebuah nilai tetap
dari ζ = 0.20. Nilai dari Rd dan φ dihitung dari Pers. (3.2.11) dan (3.2.12) yang telah
diidentifikasi. Juga diperlihatkan oleh garis patokan adalah deformasi tetap [Pers..
(3.1.8)] pada p(t), yang mana kombinasi dengan waktu pada gaya yang diberikan,
kecuali untuk nilai k yang konstan. Gerakan pada keadaan tetap diperlihatkan terjadi
pada periode gaya T = 2π/ω, akan tetapi denga perlambatan waktu = φ/2π; φ adalah
tahap sudut atau tahap perlambatan.

26
Sebuah plot dari sebuah jumlah respon amplitudo berlawanan dengan frekuensi
perkuatan yang disebut kurva frekuensi respon. Seperti sebuah pada plot untuk
deformasi u dapat dilihat pada Gambar. 3.2.6, dimana Rd [dari Pers. (3.2.11)] diplotkan
sebagai sebuah fungsi dari ω/ωn untuk beberapa nilai dari ζ; semua kurva dibawah ζ = 0
kurva pada gambar 3.1.3. Peredam getaran Rd dan oleh karena itu deformasi amplitudo
pada semua frekuensi perkuatan. Besarnya dari pengurangan ini sangat bergantung
pada frekuensi perkuatan dan selanjutnya diuji untuk tiga bagian dari skala frekuensi
perkuatan:
1. Jika rasio frekuensi ω/ωo < 1 (gaya yang berubah secara lambat) Rd sedikit lebih
besar dari pada l dan pada dasarnya adalah peredam bebas. Sehingga
Maksud dari hasil ini adalah respon dinamik dimana pada dasarnya sama
dengan deformasi tetap dan dikontrol oleh kekauan sistem.
2. Jika ω/ωo > 1 (gaya yang berubah dengan cepat) Rd cenderung nol seperti ω/ωn
yang meningkat dan pada dasarnya tidak berefek pada peredam. Untuk nilai
yang lebih besar dari ω/ωn, ( )

27

28
bagian yang dominan dalam Pers. (3.2.11) yang mana mendekati
Maksud dari hasil ini adalah respon dikontrol dari kumpulan sistem.
3. Jika ω/ωn ≈ 1 (frekuensi gaya mendekati frekuensi dari sistem), Rd sangat
berpengaruh terhadap peredam dan untuk nilai peredam yang lebih kecil, Rd
beberapa kali lebih besar dari 1, maksud dari deformasi dinamis dapat lebih
besar dari pada deformasi tetap. Jika ω = ωn, Pers. (3.2.11)
Maksud dari hasil ini adalah respon dikontrol dengan sistem peredam.

29
Sudut fase φ, yang mana mendefinisikan waktu dari pertambahan respon pada gaya,
variasi ω/ωn seperti ditunjukkan pada Gambar. 3.2.6. Hal ini diuji untuk tiga bagian
yang sama dari skala frekuensi perkuatan:
1. Jika ω/ωn < 1 (gaya berubah dengan lambat), φ mendekati 0° dan
perpindahan pada dasarnya pada fase gaya yang diberikan, seperti pada
Gambar 3.2.5a. Gaya pada Gambar 1.2.1a bergerak ke kanan, sistem juga
akan berpindah ke kanan.
2. Jika ω/ωn > 1 (gaya yang berubah dengan cepat), φ mendakati 180° dan
perpindahan pada dasarnya di luar dari fase relatif ke gaya yang diberikan,
seperti pada Gambar 3.2.5c. Ketika gaya berpindah ke kanan, sistem akan
berpindah ke kiri.
3. Jika ω/ωn = (frekuensi gaya sama dengan frekuensi dasar), φ = 90° untuk
semua nilai dari ζ dan perpindahan mencapai puncaknya ketika gaya lebih
besar dari pada nol, seperti pada Gambar. 3.2.5b.
Contoh 3.1
Perpindahan amplitudo uo dari sebuah sistem SDF ke gaya harmonic diketahui untuk 2
frekuensi. Dengan ω = ωo, uo = 5 in; dengan ω = 5ωn, uo = 0,02 in. Perkirakan rasio peredam
dari sistem.
3.2.4 Faktor Respon Dinamis
Pada bagian ini, kami memperkenalkan deformasi (perpindahan), kecepatan dan
percepatan faktor respon tanpa dimensi dan memberikan defisi amplitudo dari jumlah 3
respon. Perpindahan pada keadaan tetap pada Pers. (3.2.10) diulang untuk:
Seperti yang telah didefinisikan sebelumnya, faktor deformasi respon Rd adalah rasio
amplitudo uo dari perpindahan getaran ke deformasi tetap
Turunan persamaan (3.2.16) diberikan persamaan untuk respon kecepatan
( )
√ ⁄ ( )
(3.2.
17)

30
Dimana faktor respon kecepatan berhubungan dengan oleh
(3.2.
18)
Turunan persamaan (3.2.16) diberikan persamaan untuk respon percepatan;
( )
( )
(3.2.
19)
Dimana faktor respon kecepatan berhubungan dengan oleh
.
/
(3.2.
20)
Tinjauan dari persamaan (3.2.19) itu adalah perbandingan amplitude percepatan
getaran untuk percepatan karena gaya yang bekerja pada masa
Faktor respon dinamik diplot sebagai fungsi ω/ dalam gambar
3.2.7, plot baru dan , tapi satu untuk adalah sama seperti yang pada Gambar.
3.2.6. Seperti disebutkan sebelumnya, faktor respon deformasi adalah kesatuan
ω/ , puncak pada at ω/ , dan mendekati nol pada ω/ . Respon
kecepatan Faktor adalah nol pada ω/ , puncak pada ω/ , dan mendekati
nol ω/ . Percepatan respon Faktor adalah nol pada ω/ , puncak pada
ω/ , dan pendekatan kesatuan sebagai ω/ , √ ⁄ ada puncak
terjadi untuk .
Hubungan sederhana antara faktor respon dinamik
⁄
(3.2.
21)
Membuat adalah mungkin untuk menyajikan semua tiga faktor dalam satu grafik. Data
⁄ dalam plot linier dari Gambar. 3.2.7b ini repploted seperti ditunjukkan
pada Gambar. 3.2.8 pada empat arah kertas grafh logaritmik. Nilai dapat
dibaca dari skala logaritmik berorientasi diagonal yang berbeda dari skala vertikal
untuk , presentasi kompak ini memungkinkan untuk reflace tiga plot linear Gambar.
3.2.7 oleh plot tunggal. Konsep dasar pembangunan empat-cara ini dalam kertas grafik
logaritmik disajikan pada Lampiran 3.
3.2.5 Frekwensi resonan dan Respon Resonan
sebuah resonan frekuensi didefinisikan sebagai frekuensi memaksa di mana respon
amplitudo terbesar terjadi. Gambar 3.2.7 menunjukkan bahwa puncak pada kurva
frekuensi-respon perpindahan, kecepatan, dan percepatan terjadi pada frekuensi yang
sedikit berbeda. Selanjutnya resonansi frekuensi dapat ditentukan dengan menetapkan

31
ke nol turunan pertama dari sehubungan dengan ⁄ ; untuk √ ⁄
mereka adalah:
Perbandingan Frekwensi ⁄
Gambar 3.2.7 perubahan bentuk, Percepatan, dan factor respon percepatan untuk suatu
sistem redaman yang sebabkan oleh gaya yang harmonic
Jarak frekwensi resonan: √
Percepatan frekwensi resonan:
Akselerasi frekwensi resonan :
√
Karena suatu sistem yang tidak teredam ke tiga frekwensi resonan adalah serupa
dan sepadan dengan frekuensi sistem itu . Intuisi mungkin menyatakan bahwa
frekwensi resonan untuk suatu sistem redaman

32
Perbandingan ⁄
Gambar 3.2.8 Empat-cara logarithmig plot deformasi, kecepatan, dan percepatan
respon faktor sistem teredam keluar oleh gaya harmonic
harus pada frekuensi diri nya: √ , tetapi ini tidak terjadi.
Perbedaannya adalah kecil, namun; untuk tingkat redaman biasanya diwujudkan dalam
struktur, biasanya jauh di bawah 20%, turunan antara tiga frekuensi resonansi dan
frekuensi alami dapat diabaikan.
Tiga faktor respon dinamik pada frekuensi resonansi masing-masing adalah:
3.2.6 Half-Power Bandwidth
Sebuah properti penting dari kurva respon frekuensi untuk ditunjukkan pada
gambar. 3.2.9.
Dimana bandwidth setengah-daya didefinisikan. Jika adalah frekuensi
memaksa di kedua sisi frekuensi resonansi di kedua sisi frekuensi resonansi di mana
is √ ⁄ waktu amplitudo resonansi, maka untuk kecil
(3.2.23)

33
Perbandingan ⁄
Gambar 3.2.9 Definisi bandwidth setengah-daya
Hasil ini, diturunkan dalam derivasi 3.4, dapat ditulis kembali sebagai
atau
(3.2.
24)
Dimana ⁄ adalah frekuensi siklik. Resulf penting ini memungkinkan
evaluasi redaman dari uji getaran paksa tanpa mengetahui gaya yang diterapkan (bagian
3.4).
Penurunan Rumus 3.4
Menyamakan dari Persamaan. (3.2.11) dan √ ⁄ waktu amplitudo resonansi
diberikan oleh Persamaan (3.2.22), berdasarkan definisi, memaksa frekuensi dan
memenuhi kondisi
Pembalikan kedua belah pihak, mengkuadratkan mereka, hal menata ulang memberi
Persamaan (b) adalah kuadrat persamaan dalam ( ⁄ ) , adalah dimana akar
Dimana tanda positif diberikan lebih besar dari dan tanda negative sesuai dengan
akar yang lebih kecil dari .
Untuk rasio redaman perwakilan kecil dari struktur praktis, kedua istilah yang
mengandung 2dapat dijatuhkan dan
.
/ (1 2
(d)
Mengambil hanya istilah pertama dalam ekspansi deret taylor dari sisi kanan
memberikan
(
) (e)
mengurangi akar yang lebih kecil dari yang lebih besar memberi
(f)

34
3.2.7 Respon Kondisi Tetap pada Cosine porce
Persamaan defrensial dapat dipecahkan menjadi
m (3.2.25)
Penyelesaian tertentu dari persamaan (3.2.3) masih berlaku, tetapi kasus ini constanta C
dan D adalah :
Ini ditentukan dengan memeriksa prosedur 3.3. diberikan respon dari posisi persamaan
(3.2.3) dan (3.2.26) dapat dinyatakan seperti
( ) ( ) ( ) ( ) (3.2.27)
Dimana amplitudo , faktor respon deformasi , dan sudut fase adalah sama
dengan yang deived dan bagian 3.2.3 untuk kekuatan sinusoidal. Kesamaan ini dalam
penelitian respon steady-state untuk dua kekuatan harmonik tidak mengherankan
karena dua Eksitasi adalah sama kecuali untuk perubahan waktu.
BAGIAN B: SISTEM REDAMAN VISKOS: PENGEJAWANTAHAN
3.3 RESPON TERHADAP GENERATOR GETARAN
Generator getaran (atau mesin bergetar) dikembangkan untuk menyediakan sumber
harmonik eksitasi yang tepat untuk menguji struktur skala penuh. Pada bagian ini hasil
oretical untuk respon steady-state dari sistem SDF ke harmonik untuk disebabkan oleh
generator getaran disajikan. Hasil ini memberikan dasar untuk mengevaluasi frekuensi
alami dan redaman struktur dari data eksperimen (setion 3.4)
3.3.1 Generator Getar
Gambar 3.3.1 menunjukkan generator getaran yang berbentuk dua keranjang datar
berputar di arah yang berlawanan pada sumbu vertikal. Dengan menempatkan berbagai
jumlah berat memimpin dalam keranjang, besaran bobot berputar dapat diubah. Dua
massa pelawan-putaran, , ditunjukkan secara skematis pada Fig.3.3.2 sebagai
massa disamakan dengan eksentrisitas = e; lokasi mereka pada t = 0 ditunjukkan pada
(a) dan pada beberapa waktu t dalam (b). komponen x- pasukan Enertia massa berputar
membatalkan, dan y-komponen bergabung untuk menghasilkan kekuatan
( ) ( )
(3.3.1)

35
Dengan lari generator getaran struktur yang akan gembira, gaya ini dapat disalurkan ke
struktur. Amplitudo gaya harmonik ini sebanding dengan kuadrat dari ω frekuensi
eksitasi. Oleh karena itu, sulit untuk menghasilkan kekuatan pada frekuensi rendah dan
tidak praktis untuk mendapatkan respon statis struktur.
Gambar 3.3.1 Pelawan putaran berat eksentrik pembangkit getaran. (Atas kebaikan
dari D.E. Hudson)
3.4 frekuensi alami dan redaman dari tes harmonis
Teori dari getaran harmonis dipaksakan, dijelaskan pada bagian awal dai bab ini,
memberikan dasar untuk menentukan frekuensi alami dan redaman dari struktur didapat
dari respons terhadap pembangkit getaran yang diukur. Redaman yang terukur
memberikan data sifat struktur penting yang tidak bisa didapat dari desain. Nilai terukur
dari getaran alami adalah sifat aktual dari struktur terhadap nilai yang dihitung dari
kekakuan dan massa dari idealisasi struktur dapat dibandingkan. Riset investigasi telah
mengarah ke prosedur yang lebih baik untuk mengembangkan idealisasi struktur yang
mewakili struktur aktual.
3.4.1 pengujian resonansi
Konsep dari pengujian resonansi didasarkan dari hasil persamaan (3.2.15), dituliskan
ulang menjadi
............................................................................... (3.4.1)
Rasio redaman ζ di hitung nilai (ust)0 dan u0 percobaan pada frekuensi paksaan sebesar
frekuensi alami dari sistem. Biasanya amplitudo percepatan di ukur dan u0 = ü0/ ω2
.
Kecuali nilai frekuensi alami tidak diketahui. Frekuensi alami dideteksi dengan
percobaan menggunakan hasil sebelumnya dengan sudut fase 90° jika ω = ωn. Struktur
digetarkan pada frekuensi paksaan ω, sudut fase diukur, dan frekuensi getaran terus
menerus disesuaikan hingga sudut fase 90°.

36
Jika perpindahan akibat gaya statis p0 amplitudo dari gaya harmonis bisa didapatkan,
persamaan (3.4.1) menghasilkan nilai rasio redaman. Sepeti yang dijelaskan di awal,
sulit bagi pembangkit getaran untuk menghasilkan tenaga pada frekuensi rendah dan
tidak dapat diterapkan untuk mendapatkan nilai gaya statis yang signifikan.
Alternatifnya dengan mengukur respons statis dengan cara lain, seperti menarik
struktur. Pada kasus ini, persamaan (3.4.1) harus dimodifikasi untuk mengenali
perbedaan pada gaya yang diterapkan dalam percobaan statis relatif terhadap amplitudo
dari gaya harmonis.
3.4.2 kurva frekuensi-respons
Karena kesulitan untuk mendapatkan respons statis struktur menggunakan pembangkit
getaran, frekuensi alami dan rasio redaman dari struktur biasanya ditentukan oleh kurva
frekuensi-respons dengan cara percobaan. Pembangkit getaran di operasikan pada
frekuensi yang di pilih, respons struktur diperhatikan sampai keadaan peralihan keluar
dan amplitudo dari percepatan keadaan tetap diukur. Frekuensi dari pembangkit getaran
disetel dengan nilai baru dan pengukuran diulang. Frekuensi paksaan bervariasi pada
rentang yang frekuensi alami sistem termasuk di dalamnya. Kurva frekuensi-respons
dalam bentuk percepatan amplitudo terhadap frekuensi dapat diplot secara langsung
dari data yang diukur. Kurva ini untuk gaya dengan amplitudo proporsi terhadap ω2 dan
bisa menyerupai kurva frekuensi-respons dari gambar 3.3.3. jika setiap percepatan
amplitudo terukur dibagi oleh ω2, kita dapatkan kurva frekuensi-percepatan untuk gaya
amplitudo konstan. Kurva ini diukur dari data dapat menyerupai kurva pada gambar
3.2.7c. Jika percepatan terukur dibagi oleh ω4, hasil dari kurva frekuensi-perpindahan
untuk kurva gaya amplitudo konstan dapat menjadi kurva versi percobaan pada gambar
3.2.7a.
Frekuensi alami dan rasio redaman dapat ditentukan dari salah satu versi percobaan dari
kurva frekuensi-respons pada gambar 3.3.3, 3.2.7c, dan 3.2.7a. untuk rentang terapan
dari redaman frekuensi alami fn pada dasarnya sama dengan frekuensi paksaan pada
resonansi. Rasio redaman diperhitungkan dengan persamaan 3.2.24 menggunakan

37
frekuensi fa dan fb , ditentukan seperti diilustrasikan pada gambar 3.4.1. dari kurva
percobaan ditampilkan dalam bentuk bagan. Walaupun persamaan ini didapatkan dari
kurva frekuensi-perpindahan untuk amplitudo tetap gaya harmonis, ini mendekati valid
untuk kurva respons lain yang dibahas sebelumnya selama struktur diredam sedikit.
Contoh 3.2
Model rangka plexiglass pada gambar 1.1.4 diletakkan di atas meja getar yang dapat
menerapkan getaran harmonis dasar dari frekuensi dan amplitudo yang ditentukan.
Setiap frekuensi getaran ω, percepatan amplitudo üg0 dan dari Table dan bagian atas
dari rangka, direkam secara berturut-turut. Kemampuan pengiriman TR = üg0/
dikumpulkan dan data digambarkan pada gambar E3.2. tentukan frekuensi alami dan
rasio redaman dai rangka plexiglass dari data ini.
Penyelesaian puncak dari kurva frekuensi-respons terjadi pada 3,59 Hz. Asumsikan
redamannya kecil, frekuensi natural fn = 3.59 Hz.
Nilai puncak dari kurva kemampuan pengiriman adalah 12.8. sekarang gambar garis
horizontal pada 12.8/√ = 9.05 seperti yang terlihat. Garis ini berpotongan dengan
kurva frekuensi-respons pada fb = 3.74 Hz dan fa = 3.44 Hz. Oleh karena itu dari
persamaan 3.3.24
Nilai redaman ini sedikit lebih besar dari 3.96% ditentukan dari pengujian getaran
bebas pada model (contoh 2.4)
Mengingat kita sudah menggunakan persamaan 3.2.24 untuk menentukan rasio
redaman pada sistem dari kurva kemampuan pengiriman, mengingat persamaan ini
diambil dari kurva frekuensi-perpindahan. Pendekatan ini layak karena frekuensi

38
getaran dalam rentang fa ke fb nilai numerik dari TR dan Rd dekat, ini ditinggalkan pada
pembaca untuk memeriksa setelah persamaan TR muncul pada subbab 3.6
3.5 penyebaran gaya dan pengasingan getaran
Mempertimbangkan sistem massa peredam pegas tampak pada sisipan kiri gambar
3.5.1 dipengaruhi getaran harmonus. Gaya disebarkan ke dasar adalah
.............................................................. (3.5.1)
Subtitusikan persamaan (3.2.10) untuk u(t) dan persamaan (3.2.17) untuk ů(t) dan
menggunakan persamaan (3.2.18) memberikan
........................................ (3.5.2)
Nilai maksimum dari fT(t) terhadap t adalah
....................................................................
Yang mana setelah menggunakan (ust)0 = p0/k dan ζ = c/2mωn, dapat dituliskan
.....................................................................................
Subtitusikan persamaan (3.2.11) untuk Rd menghasilkan persamaan untuk rasio dari
gaya disebarkan maksimum ke amplitudo p0 dari gaya yang diterapkan, dikenal sebagai
kemampuan penyebaran (TR) dari sistem
...................................... (3.5.3)
Kemampuan penyebaran digambarkan pada gambar 3.5.1 sebagai fungsi dari rasio
frekuensi ω/ωn untuk beberapa nilai dari rasio redaman ζ. Skala logaritma telah dipilih
untuk menandai kurva untuk nilai ω/ωn yang besar dari wilayah yang diinginkan.
Ketika damping mengurangi amplitudo dari gerakan pada semua frekuensi getaran
gambar 3.2.6, redaman mengurangi gaya yang disebarkan saja jika ω/ωn < √ . Untuk
gaya yang disebarkan kurang dari gaya yang diterapkan, kekakuan dari sistem penumpu
dan disebabkan frekuensi alami harus cukup kecil sehingga ω/ωn > √ . Tidak ada
redaman yang diinginkan pada sistem penumpu karena, pada rentang frekuensi ini,
redaman meningkatkan gaya yang disebarkan.
3.7 Alat Ukur Getaran

39
Pengukuran getaran menjadi minat besar di dalam aspek banyak orang tentang
bangunan struktural. Sebagai contoh, pengukuran tanah/landasan yang berguncang
suatu gempabumi menyediakan data dasar untuk bangunan tahan gempa, dan data
tersebut menghasilkan gerakan suatu struktur yang menyediakan pengertian yang
mendalam bagaimana struktur tahan terhadap gempabumi. Walaupun alat ukur itu
rumit dan sudah sangat maju, unsur dasar instrumen ini adalah beberapa format tentang
suatu transducer. Dalam format paling sederhananya suatu transducer adalah suatu
Massa plat logam sistem menjulang di dalam suatu bingkai kaku yang terikat dengan
permukaan gerakan yang terukur. Gambar 3.7.1 menunjukkan suatu gambar yang
menurut bagan dari instrumen seperti itu untuk merekam gerakan yang horisontal suatu
pendukungan penunjuk tiga transducers diperlukan untuk mengukur ke tiga komponen.
Ketika diperlakukan untuk mengisyaratkan dukungan menunjuk, transducer gerak
massa sehubungan dengan bingkai, dan jarak [yang] relatif ini direkam setelah
perbesaran . Itu adalah sasaran dari presentasi yang ringkas ini untuk mendiskusikan
prinsip yang mendasari perancangan ukuran getaran instrumen sedemikian rupa
sehingga yang terukur adalah jarak relatif yang diinginkan gerakan akselerasi .
Gambar 3.7.1 Gambar bagan suatu vibration-measuring instrumen dan merekam
gerakan.
3.7.1 Pengukuran Akselerasi
Gerakan yang terukur biasanya bervariasi dengan waktu dan boleh meliputi banyak
komponen harmonik yang mencakup suatu cakupan frekwensi, Itu mengandung
pelajaran, bagaimanapun, untuk mempertimbangkan lebih dulu pengukuran gerak
harmonik sederhana yang diuraikan oleh Gambar, ( 3.6.1). Penggantian/Jarak massa
instrumen sehubungan dengan gerakkan bingkai diberi oleh Gambar, ( 3.6.2) yang
ditulis ulang seperti U(T yang direkam) adalah akselerasi dasar yang dimodifikasi oleh
suatu faktor - Rdlw~ dan merekam dengan suatu penyimpangan waktu ¢/. 3.2.6, Rd dan
¢ berbeda menurut frekwensi, tetapi w~ adalah suatu instrumen yang tetap tidak terikat
pada dukungan khusus.
Obyek disain instrumen adalah untuk membuat Rd dan ¢/ w ketika tidak terikat pada
frekwensi eksitasi, mungkin sebab kemudian masing-masing komponen harmonik
akselerasi akan direkam dengan proportional faktor yang sama dan penyimpangan
waktu yang sama . Kemudian, jika gerakan untuk direkam terdiri dari dari banyak
komponen harmonik, yang direkam u ( t) akan mempunyai bentuk yang sama sebagai
pen;dukungan mengisyaratkan dengan suatu pergeseran waktu tetap. Ini pergeseran
waktu tetap yang hanya merupakan gerakkan waktunya lama sedikit, yang mana pada
umumnya tidak penting. Menurut Gambar 3.7.2 ( yang mana [adalah] suatu diperbesar
alur getaran Gambar. 3.2.6 dengan nilai, jika~ = 0.7, kemudian di atas frekwensi
mencakup w/wn = 0.50, Rd adalah sama dengan 1 ( kurang dari 2.5% kesalahan) dan

40
variasi ¢ dengan w adalah dekat dan linier, menyiratkan ¢ lw sangat utama dan tetap.
Dengan begitu suatu instrumen dengan suatu frekuensi diri 50 Hz dan nisbah redaman
0.7 mempunyai suatu frekwensi bermanfaat terbentang dari 0 untuk 25 Hz dengan
sedikit kesalahan. Ini adalah keunggulan dari instrumen modern, secara komersial
tersedia merancang untuk mengukur akselerasi [tanah/landasan] mempengaruhi
gempabumi. Sebab amplitudo yang terukur u(t) adalah sebanding Rd/wn2, suatu
frekuensi tinggi instrumen akan mengakibatkan suatu sangat kecil penggantian/jarak
yang pada hakekatnya diperbesar instrumen ini untuk pengukuran sesuai.Gambar 3.7.3
pertunjukan [adalah] suatu perbandingan akselerasi [tanah/landasan] .
Instrumen tetap -1/wn2 digambar ( 3.7.1). Karena frekwensi eksitasi 1= 20 dan 10Hz,
gerakan yang di/terukur mempunyai amplitudo akurat, tetapi kesalahan pada 1= 40 Hz
adalah nyata; dan pergeseran fasa, walaupun tidak serupa untuk ke tiga frekwensi, tapi
dianggap serupa. Jika akselerasi [tanah/landasan] adalah pen;jumlahan ke tiga
komponen harmonik, pertunjukan figur ini bahwa gerakan yang direkam memenuhi
akselerasi [tanah/landasan] [itu] dengan memuaskan di (dalam) amplitudo dan
membentuk. Ketelitian gerakan yang direkam u(t) dapat ditingkatkan, terutama pada
lebih tinggi frekwensi, dengan menghitung ug(t- /w) dari u(t yang terukur)
menggunakan Gambar ( 3.7.1) dengan Rd yang ditentukan dari Gambar ( 3.2.11) dan
mengenal kekayaan instrumen Wn dan seperti (itu) di cek diulangi untuk masing-
masing komponen harmonik di (dalam) u(t), dan komponen yang dikoreksi kemudian
adalah manyatukan untuk memperoleh ug ( t). Perhitungan ini dapat dilaksanakan
terpisah oleh prosedur alihragam Fourier cepat, di luar lingkup dari buku ini.
3.7.2 Pengukuran Jarak
Hal ini digunakan untuk mendisain transducer sedemikian sehingga penggantian/jarak
yang relatif u(t) mengukur penggantian/jarak pendukungan ug ( r), Ini dicapai dengan
pembuatan transducer memantul sangat fleksibel atau transducer berkumpul dengan
sangat besar, atau kedua-duanya. Instrumen seperti itu susah dipakai oleh karena massa
yang berat/lebat dan lembut, dan sebab itu harus mengakomodasi penggantian/jarak
pendukungan yang diantisipasi, yang mungkin sama besar seperti 12 / 36. Selama
gempa bumi.
3.8 Energi Aliran Uap
Energi ini adalah sebanding pada amplitudo gerakan, seperti ditunjukkan di (dalam)
Gambar. 3.8.1. itu bukanlah suatu nilai tetap untuk manapun diberi jumlah aliran dan
amplitudo sejak energi mengusir peningkatan secara linier dengan frekuensi getaran.

41
Plot terhadap u membentuk elips berputar sebagaimana diperlihatkan pada gambar
3.8.2 akibat suku ku pada persamaan 3.8.8. Energi dissipasi oleh damping (peredam) tetap di
area didalam elips karena luas (area) yang dikelilingi oleh gaya elastis bernilai tunggal
adalah nol.
Lengkung histeris dihubungkan dengan redaman viskos adalah hasil dari histeris dinamis
karena kelakukan alami beban luas lengkung (loop) sebanding dengan frekuensi getaran, ini
menyiratkan kurva deformasi-gaya menjadi kurva bernilai tunggal jika beban siklus dipakai
cukup lambat (ω=0). Sifat utama dari histeris dinamis adalah lengkung histeris cenderung elips
ketimbang titik seperti pada gambar Fig. 1.3.1c jika dihubungkan dengan deformasi plastis.
Dalam kasus lain lengkung histeris dapat terjadi meski dalam beban siklus statis, fenomena ini
kemudian dikenal sebagai histeris statis, karena kurva deformasi-gaya tidak terpengaruh rasio
deformasi.
Ada dua cara menukur damping, kapasitas redaman khusus dan faktor redaman khusus.
Kapasitas redaman khusus adalah perbandingan sebagian energi regangan
yang lenyap dalam setiap siklus gerakan, baik dan diperlihatkan pada gambar 3.8.3.
Faktor redaman khusus atau faktor kehilangan didefinisikan
3.8.9
Jika energi dapat dihilangkan ketika nilai seragam selama siklus gerakan harmonik (yang pada
kenyataannya tidak realistis), dapat ditulis sebagai kehilangan energi per radian dibagi
energi total sistem. Dua ukuran ini jarang digunakan pada getaran struktur karena hanya cocok
pada damping sangat kecil.

42
Penurunan Pers. 3.6
Persamaan 3.8.2 memberikan energi masuk per siklus dimana sudut fase, didefiniskan oleh
persamaan 3.2.12 dapat ditulis sebagai
(
) (
)
Subtitusikan ke persamaan 3.8.2 menghasilkan 3.8.3.
3.9 Ekivalensi Redaman Viskos
Sebagai mana dalam pasal 1.4 redaman dalam struktur sebenarnya biasanya dianggap sama
dengan redaman viskos. Definisi sederhana dari persamaan redaman viskos didasarkan atas
ukuran respon dari sistem terhadap gaya harmonik pada frekuensi getaran sama dengan
frekuensi alami dari sistem. Rasio redaman dihitung dari Pers. 3.4.1 dengan memakai
ukuran nilai dan ( ) . Persamaan ini memperhitungkan semua mekanisme pelenyapan
energi yang timbul dalam eksperimen.
Definisi lain redaman viskos adalah jumlah redaman yang timbul luas bidang yang sama
didalam kurva sebagaimana didapat secara eksperimen pada sistem sebenarnya. Rasio redaman
dihitung dari Pers. 3.2.24 dengan memakai frekuensi getaran , dan , (Fig. 3.4.1)
didapat dari kurva respon-frekuensi secara eksperimen.
Metode umum untuk mendifinikan ekivalensi redaman viskos adalah dengan menyamakan
energi yang lenyap dalam siklus getaran dari struktur yang sebenarnya dan sebuah sistem
ekivalensi redaman viskos. Untuk struktur sebenarnya hubungan perpindahan-gaya didapay
dari sebuah eksperimen dengan beban siklus dengan amplitude perpindahan seperti pada
gambar 3.9.1.

43
Energi yang lenyap dalam struktu sebenarnya digambarkan pada bidang yang dikelilingi
lengkung histeris. Samakan ke energi yang lenyap dalam redaman viskos yang diberikan
Pers. 3.8.1 menghasilkan :
atau
3.9.1
Dimana energi regangan dihitung dari kekakuan k yang ditentukan dari eksperimen.
Beban eksperimen menghasilkan kurva gaya deformasi pada Fig. 3.91 sehingga dapat
dilakukan pada dimana respons sistem sangar sensitif terhadap redaman. Maka Pers.
3.9.1 menjadi
3.9.2
Rasio redaman ditentukan dari sebuah tes ketika bisa jadi salah pada frekuensi
getaran lainnya, akan tetapi cukup menjadi pendekatan yang memuaskan.
Contoh 3.6
Sebuah benda bergerak dalam eksperimen fluida dalam gaya hambatan sama dengan akar dari
kecepatan , dimana tanda positif digunakan untuk positif dan sebaliknya. Hitung
koefisien ekivalensi redaman viskos untuk gaya yang bekerja pada sistem osilasi dalam
pengaruh gerak harmonik dengan amplitudo dan frekuensi . Hitung pula perpindahan
amplitudo ketika .
Jawab Andai waktu dihitung dari posisi perpindahan negatif terbesar, gerakan harmoniknya
adalah
( )
Energi yang lenyap dalam satu siklus putaran gerakan adalah

44
∫ ∫
∫
∫ ( )
Samakan energi ini ke energi yang lenyap dalam redaman viskos [Pers. 3.8.1] memberikan
Subtitusikan pada Pers. Sebelumnya dan ke c di Pers. 3.2.15 sehingga
(
)
BAGIAN C : SISTEM TANPA REDAMAN VISKOS
3.10 Getaran Harmonik dengan Redaman Suku Sendiri (Rate Independent)
3.10.1 Redaman Suku Sendiri
Sebuah penelitian terhadap logam struktural mengindikasikan energi lenyap secara dakhil
(internally) dalam redaman siklus dari bahan sangat independen dari frekuensi siklus. Dengan
cara yang sama tes getaran paksa pada struktur mengindikasikan bahwa rasio ekivalensi
redaman viskos adalah secara kasar sama untuk semua mode dan frekuensi alami. Sebab itu
kita merujuk tipe redaman ini sebagai redaman linear suku-sendiri.
Redaman suku sendiri dihubungkan dengan histeris statik disebabkan oleh regaman plastis,
deformasi plastis lokal, plastisitas kristal dan aliran plastis dalam bidang tegangan diantara
batas elastis nyata. Dalam skala mikroskopis ketidakhomogenan dari distribusi tegangan
diantara kristal-kristal dan konsentrasi tegangan pada simpangan batas kristal menghasilkan
tegangan lokal cukup tinggi untuk menyebabkan regangan plastis lokal meskipun rata-rata
tegangan global mungkin dibawah batas elastis. Mekanisme redaman tidak memasukkan energi
lenyap dalam deformasi plastis global yang mana seperti disebutkan semula ditangani secara
hubungan non-linear antara gaya fs dan deformasi u.
Cara sederhana yang dapat digunakan untuk memperlihatkan redaman linear suku sendiri
adalah mengasumsikan bahwa gaya redaman berbanding lurus dengan kecepatan dan berbalik
terbalik dengan frekuensi
3.10.1
Dimana k adalah kekakuan struktur dan adalah koefisien redaman. Energi yang lenyap dari
tipe redaman ini dalam sebuah siklus redaman pada frekuensi adalah berdiri sendiri dari
(Fig. 3.10.1). Sebagaimana diberikan pada Pers. 3.8.1 dimana c diganti dengan
3.10.1

45
Secara kontras energi yang lenyap pada redaman viskos bertambah secara linear dengan
frekuensi gaya sebagaimana diperlihatkan pada Fig.3.10.1.
Redaman suku sendiri mudah dijelaskan jika getarannya harmonik dan kita tertuju hanya pada
respon kondisi tetap dari sistem ini. Kesulitan timbul dalam menerjemahkan mekanisme
redaman ini terhadap domain waktu. Hal ini sangat berguna dalam metoda analisis domain-
frekuensi (Pasal 1.10.3). Suku komplek ( ) menggambarkan elastasitas dan gaya
redaman dalam waktu yang sama, ( ) adalah kekakuan komplek sistem. Kekakuan
komplek tidak punya arti secara fisis, bagaimanapun pengertian tekniknya sama dengan
kekakuan elastis.
Untuk redaman bentuk ini, seperti terlihat pada subbab 3.8, energi yang hilang akan
meningkatkan perpindahan kuudratik dengan perpindahan amplitudo, dan perpindahan
amplitudo ini dibatasi redaman tidak peduli seberapa kecil. Dalam kaitan dengan fakta bahwa
amplitudo tidak terbatas yang terjadi pada ω= ωn jika persamaan (3.11.2) terpenuhi, sudut fase
menunjukkan sebuah diskontinuitas lompatan pada ω= ωn gambar (3.11.2 ).
3.11.3 Solusi Menggunakan Persamaan Redaman Viscous
Dalam subbab ini solusi pendekatan untuk kondisi tetap respons harmonis dari sistem dengan
friksi Coulumb didapatkan dengan memodelkan mekanisme redaman ini dengan eluvalensi
redaman viscous. Mensubtitusikan EF, energy yang berkurang akibat friksi Coulumb dihasilkan
oleh persamaan (3.11.3), untuk ED dalam persamaan (3.9.1) memberikan rasio redaman viscous
ekuivalen
(3.11.4)
Di mana . Solusi pendekatan untuk perpindahan amplitudo didapatkan dengan
mensubtitusikan untuk ; dalam persamaan (3.2.11):

46
*, ( ) - ,( )( )-
+
Ini berisikan di sisi kanan sama dengan. Mengkuadratkan dan menyelesaikan secara aljabar,
perpindahan yang dinormalkan adalah
( )
* ,( )( )-
+
( )
Hasil dari pendekatan ini valid jika
. Solusi pendekatan tidak dapat digunakan jika
karena kuantitas di bawah radikal adalah negatif dan pembilang adalah imajiner.
Pendekatan ini dan solusi eksak dibandingkan pada gambar (3.11.2). Jika gesekan cukup kecil
untuk menimbulkan gerakan kontinu, gerakan ini terjadi secara sinusoidal dan solusi
pendekatan cukup dekat dengan solusi eksak. Jika gaya gesek kekuatan besar, gerakan tidak
kontinu dengan hasil berhenti dan mulai bergerak, yang banyak terdistorsi relatif terhadap
sebuah sinusoid, solusi pendekatan menjadi kurang baik.
Solusi pendekatan untuk sudut fase diperoleh dengan mensubtitusikan ζeq untuk ζ dalam
persamaan (3.2.12 )
Mensubtitusikan u0 dari persamaan (3.11.5)
Untuk nilai F/po yang diberikan nilai φ adalah konstan tetapi dengan nilai positif jika ω/ωn < 1
adalah negatif jika ω/ωn > 1. Ini ditunjukkan pada gambar 3.11.2, dimana terlihat sudut fase
tidak kontinu pada ω=ωn untuk friksi Coulomb.
Contoh 3.7
Struktur pada contoh 2.7 dengan perangkat friksi melendut 2 in. Di bawah gaya lateral p = 500
kips. Berapakah amplitudo pendekatan jika gaya harmonis diganti dengan p (t) = 500sinwt,
dimana periode paksaan T=1 detik?
BAGIAN D Respons Terhadap Eksitasi Periodik
Sebuah fungsi periodik adalah salah satu bagian ditentukan terhadap T0 berulang secara tidak
terbatas gambar (3.12.1). sebagian gaya adalah periodik atau mendekati periodik. Dibawah
kondisi tertentu, gaya pendorong pada kapal, gaya ombak pada bangunan lepas pantai, dan gaya

47
angin ditimbulkan akibat pusaran pada bangunan tinggi dan langsing mendekati periodik.
Gerakan tanah akibat gempa tidak memiliki kesamaan dengan fungsi periodik. Bagaimanapun
juga getaran tumpuan berasal dari kendaraan bergerak di atas jalan layang ditetapkan karena
retak jangka panjang dapat mendekati periodik.
Kita tertarik menganalisa respons getaran periodik untuk alasan yang lain. Analisa dapat
diperluas menjadi getaran lain dengan menggunakan teknik fast Fourier transform yang lain.
Ini tidak dijelaskan dalam buku ini.
3.12 Representasi Deret Fourier
Sebuah fungsi p (t) dikatakan periodik dengan periode To jika memenuhi hubungan berikut:
Sebuah fungsi periodik dapat dipisahkan menjadi komponen-komponen harmonik dengan
menggunakan deret Fourier:
dimana harmonik fundamental dalam eksitasi memiliki frekuensi
Koefisien dalam deret Fourier dapat dinyatakan dalam hal p (t) karena fungsi sinus dan cosinus
ortogonal:
Koefisien a0 adalah nilai rata-rata p (t); koefisien aj dan bj adalah amplitudo ke-j harmonis dari
frekuensi jω0.
Secara teoritis, jumlah istilah tak terbatas diperlukan untuk deret Fourier untuk berkumpul ke p
(t). Dalam prakteknya, bagaimanapun, beberapa istilah yang cukup untuk konvergensi yang
baik. Pada sebuah diskontinuitas, seri Fourier konvergen ke nilai rata-rata dari nilai-nilai ke kiri
dan ke kanan diskontinuitas.
3.13 Respons Terhadap Gaya Periodik

48
Sebuah periodik eksitasi menyiratkan bahwa eksitasi telah ada untuk waktu yang lama, dimana
dalam waktu respons sementara berhubungan dengan perpindahan awal dan kecepatan sudah
berkurang. Hingga, hanya untuk eksitasi harmonis, kita tertarik untuk mencari respons kondisi
tetap. Respons dari sistem linear terhadap gaya periodik dapat ditentukan dengan
menggabungkan respons terhadap istilah eksitasi individu dalam deret Fourier.
Respon dari sistem tidak teredam untuk gaya konstan p (t) = a0 diberikan oleh persamaan (f)
dari Contoh 1.5, di mana istilah cos ωt akan berkurang karena redaman (lihat bagian 4.3),
meninggalkan solusi kondisi tetap.
Respons kondisi tetap dari sistem SDF teredam vicous terhadap cosinus gaya harmonik p (t) =
cos a1 (} wot) diberikan oleh persamaan (3.2.3) dan (3.2.26) dengan ω diganti dengan jw0:
Demikian pula, respons kondisi tetap dari sistem terhadap gaya sinusoidal sin bj (jω0t) diberikan
oleh persamaan (3.2.3) dan (3.2.4) dengan ω diganti dengan jω0:
Jika ζ=0 dan salah satu βj=1, respons kondisi tetap tak terbatas dan tidak bermakna karena
respon sementara tidak pernah berkurang (lihat Bagian 3.1); selanjutnya diasumsikan bahwa
ζ≠0 dan βj≠1.
Repons kondisi tetap dari sistem dengan redaman eksitasi periodik p (t) adalah kombinasi tar
respons terhadap istilah individu dalam deret Fourier:
Kontribusi relatif dari berbagai istilah harmonik dalam persamaan (3.13.6) tergantung pada dua
faktor: (1) amplitudo aj dan bj komponen harmonik dari fungsi paksaan p (t), dan (2) rasio
frekuensi βj. Repons akan didominasi oleh komponen harmonik yang βj dekat dengan kesatuan
[yaitu, frekuensi paksaan jw0 dekat dengan frekuensi alami (lihat Gambar. 3.2.6)].
Empat istilah pertama dari deret ini ditunjukkan pada Gambar. E3.8b, di mana frekuensi dan
amplitudo relatif 1, 1/3, 1/5, 1/7 dari empat harmonik yang jelas. Jumlah dari istilah Fourier
ditunjukkan pada Gambar. E3.8c, di mana empat istilah memberikan representasi yang wajar
dari fungsi paksaan. Pada t = T0/2, dimana p (t) tidak kontinu, deret Fourier konvergen ke nol,
nilai rata-rata dari p(T0/2).
Respon dari sistem SDF terhadap fungsi paksaan Persamaan (e) diperoleh dengan
mensubtitusikan persamaan (b), (c), dan (d) dalam Pers. (3.13.6) untuk mendapatkan

49
Ditunjukkan pada Gambar. E3.8d merupakan respons dari sistem SDF dengan periode alami Tn
= T0/4 terhadap empat beban istilah pertama dalam seri Fourier dari persamaan (e). Ini adalah
plot individu dari istilah dalam persamaan (f) dengan βj = jωo/ωn = jTn/T0 = j/4. Amplitudo
relatif dari istilah-istilah ini jelas. Tak satu pun dari ini sangat besar karena tidak ada nilai-nilai
βj sangat dekat dengan kesatuan; dicatat bahwa βj = ¼, ¾, 5/4, 7/4. i.and selanjutnya. Secara
kumulatif jumlah individu respon istilah dari persamaan. (f) ditunjukkan pada gambar E3.8e, di
mana kontribusi dari keempat istilah dianggap kecil. Istilah yang lebih tinggi akan lebih kecil
karena amplitudo komponen harmonik p (t) menurun dengan j dan βj akan lebih jauh dari
kesatuan.