Embed Size (px)
DESCRIPTION
Elaborato scritto del progetto "ROBOT ESPLORATORE" di Ferrari Marco e Verona Diego. Robot in grado di localizzare oggetti in una stanza e prenderli per depositarli successivamente alla "base".
Citation preview

5/6/2018 Tesina Maturità 2011 - ROBOT ESPLORATORE (Ferrari Marco & Verona Diego) - slidepdf.com
http://slidepdf.com/reader/full/tesina-maturita-2011-robot-esploratore-ferrari-marco-verona-diego 1/34
Istituto
Classe V sez. B I
Sp
“R
Ferrari
1
ecnico Industriale Sta
“Alessandro Rossi”
nd. Elettronica e Teleco
ecializzazione robotica
BOT ESPLORATORE”
Marco & Verona Dieg
ale
unicazioni
o

5/6/2018 Tesina Maturità 2011 - ROBOT ESPLORATORE (Ferrari Marco & Verona Diego) - slidepdf.com
http://slidepdf.com/reader/full/tesina-maturita-2011-robot-esploratore-ferrari-marco-verona-diego 2/34
2
INTRODUZIONE:
Il nostro progetto d’esame fa parte del vasto e variegato mondo della robotica e
dell’automazione industriale, che sempre con più vigore trova spazio nella vita
quotidiana. Le persone acquisiscono ogni giorno una maggiore familiarità con talimacchine, creando un fertile contesto per lo sviluppo della robotica. Il nostro
progetto combina l’automazione ricercata nell’ambiente produttivo-industriale
trasportandolo in un più vasto contesto di utilizzo. La struttura leggere e compatta e
un semplice sistema di locomozione rende il robot capace di muoversi in ambienti
casalinghi, differendo dai robot ingombranti e fissi che si trovano in tutte le
industrie. Il suo funzionamento generale permette una notevole flessibilità di
utilizzo mentre la sua struttura, composta da braccio meccanico e ruote motrici,
permette un campo di utilizzo molto ampio. Il robot è in grado di raccogliere oggetti
e di trasportarli in luoghi diversi. La modalità con cui svolge tale compito è
facilmente modificabile via software. I sensori del robot permettono allo stesso di
individuare oggetti di natura diversa e comune eliminando il bisogno che gli oggetti
stessi inviino al robot segnali particolari e rendendo il robot flessibile a diverse
situazione e impieghi. I due sensori in questione riprendono, inoltre, il
funzionamento della vista umana. La posizione dei sensori permette al robot di
determinare, non solo la distanza dell’oggetto, ma anche la posizione dello stesso
nello spazio. Con vari livelli di complessità software è possibile programmare il robot
dalla semplice individuazione di ostacoli nelle vicinanze fino alla ricostruzionedell’ambiente stesso che lo circonda. Tutte queste caratteristiche rendono il
progetto interessante e durante la sua costruzione è stato possibile aggiungere di
volta in volta nuovi compiti.
Nel progetto finale il robot è in grado di ricercare fino a due oggetti differenti ed una
volta raccolti inizia la ricerca della “base” dove depositerà tali oggetti prima di
cominciare una nuova ricerca. Durante la fase di ricerca il robot analizza i dati
provenienti dai due sensori ultrasuoni, mentre ruota su se stesso in modo da
ricoprire uno spazio di visuale di 360°. Grazie al confronto dei dati raccolti identifical’oggetto più vicino e si muove in tale direzione. A questo punto, sempre grazie
all’uso di due sensori ultrasuoni, il robot inizia a muoversi verso l’oggetto tenendosi
sempre il più verticalmente possibile a quest’ultimo in modo che l’oggetto entri
nell’apertura dove è alloggiata la pinza. Quando l'oggetto entra nella “bocca”
interrompe un fascio luminoso diretto verso un sensore di luce, in modo da
avvertire il “cervello” del robot, che a sua volta farà fermare i motori del robot.
Mentre il robot è immobile il braccio meccanico si aziona e, grazie a sensori di
contatto, controlla il suo movimento depositando il primo oggetto nel relativo
scomparto. Quando la pinza ritorna nella posizione originale il robot ricomincia lasua ricerca. Quando anche il secondo oggetto è nello scompartimento relativo il
robot inizia la ricerca della base. Per far riconoscere al robot il luogo preciso si è

5/6/2018 Tesina Maturità 2011 - ROBOT ESPLORATORE (Ferrari Marco & Verona Diego) - slidepdf.com
http://slidepdf.com/reader/full/tesina-maturita-2011-robot-esploratore-ferrari-marco-verona-diego 3/34
scelto di utilizzare una sorg
sensori di luce posti sul lato
seguire la sorgente più lumi
terra e inizia una nuova rice
DESCRIZIONE STRUTTURA E
inesistente spazio di azione.
L'intera struttura del robot
soddisfano un buon rappo
tale scopo abbiamo usato
per una parte della struttur
La base del robot è stata
resistente per sostenere il p
E' stata poi ritagliata un’a
base verso il lato frontalecentrale rispetto la posizion
di ultrasuono e di luce,
possibilità alla lattina di en
volta entrata, essere presa
verso la sua locazione p
braccio meccanico è comp
pinza (comprata in kit di mo
viene sollevata da un
grazie ad un filo da pesca
affidabilità e resistenza all'
Figura 1: struttura rob
3
nte luminosa fissa e esterna al robot
frontale del robot. In questi modo il
nosa. Raggiunta la base il robot depo
rca.
CORPO DEL ROBOT:
La struttura assume
con lato di 30 [cm] ch
muoversi grazie a 2
ruote sferiche per
struttura. Le ruote
scelte di materialcoefficiente di attrit
problemi causati d
aderenza di alcune
sferiche le abbiamo a
la loro semplicità e p
relativamente all'ing
dei suoi componenti è stata costruit
to peso/forza supportata da un pre
prevalentemente alluminio per la st
della carrucola.
reata con un foglio di plastica sotti
eso della circuiteria, delle lattine e del
ertura sulla
del robot ee dei sensori
per dare la
trare e, una
trasportata
edefinita. Il
osto da una
ntaggio) che
ervomotore
che assicura
usura e una
t
Figura 2: pinz
, in aggiunta a due
robot è in grado di
sita i due oggetti a
na forma di cubo
ha la possibilità di
uote motrici e 2
il sostegno della
otrici le abbiamo
con un altoo per ovviare ai
lla mancanza di
uperfici. Le ruote
dottate invece per
r i pochi problemi
mbro e al quasi
a con materiali che
zzo ragionevole. A
ruttura e plexiglas
le, ma abbastanza
braccio.
r
obot

5/6/2018 Tesina Maturità 2011 - ROBOT ESPLORATORE (Ferrari Marco & Verona Diego) - slidepdf.com
http://slidepdf.com/reader/full/tesina-maturita-2011-robot-esploratore-ferrari-marco-verona-diego 4/34
forza massima portante di
ruotare nelle tre posizioni (
abbiamo utilizzato un ulte
movimento. Per mantenere
della base abbiamo aggancassicurandone la possibilità
quadrata di plexiglas che sc
I sensori luce, che vengono
perché il loro rivestimento
a contatto con la strutturasensori stessi. Sia i sensori
anteriore della struttura de
degli occhi umani (percezio
luce che abbiamo selezion
della bocca del robot è ill
maniera quasi assoluta la p
deve essere gestita, per i s
una taratura minuziosa e
possibile accurata. Il robot
ideato e progettato intera
noi e attribuiamo la sua
non perfettamente allineat
utilizzo di strumentazione
basilare e molto spesso ina
ad un simile progetto.
Figura 3: servomotore carrucol
4
5 Kg. Per dar la possibilità alla pinza
posizione di "presa", posizione sede
riore servomotore che sostiene il p
la struttura il più verticale possibile d
iato la sua estremità superiore allo sdi rotazione grazie ad un perno.
Una parte della struttura
particolarmente interess
relativa ai movimenti di p
spostamento, discesa e ri
Da notare che per a
abbiamo sfruttato la f
abbiamo utilizzato a nospostamento del barice
lattina della pinza stessa
attaccata superiorment
rre su una rotaia verticale.
utilizzati frontalmente, sono stati is
sterno coincide con la base del fotot
he funge da massa crea una situaziodi luce che i sensori ultrasuoni sono
l robot e la loro funzione può essere
ne della profondità e distanza di un
ato per creare un interruttore elet
uminato da 5 led ad alta luminosit
ssibilità di inteferenza della luce amb
nsori di luce destinati alla ricerca d
d il più
è stato
ente da
truttura
a ad un
i lavoro
deguata
a
Figura 4: apertura fr
e alla carrucola di
e 2 per le lattine)
eso e permette il
urante la rotazione
cheletro del robot
del robot che ci ha
ti è stata quella
esa, sollevamento,
lascio della lattina.
bassare la pinza
rza di gravità e
stro vantaggio lotro con e senza
. Infatti la pinza è
ad una base
lati dalla struttura
ansitro stesso, che
ne di anomalia deiubicati nella parte
associata a quella
ggetto). Il sensore
ronico all'ingresso
per escludere in
ientale, che invece
lla base, grazie ad
o
ntale

5/6/2018 Tesina Maturità 2011 - ROBOT ESPLORATORE (Ferrari Marco & Verona Diego) - slidepdf.com
http://slidepdf.com/reader/full/tesina-maturita-2011-robot-esploratore-ferrari-marco-verona-diego 5/34
SCHEMA A BLOCCHI DEL CO
Andremo ora a spiegare, de
robot.
BATTERIA:
Abbiamo scelto i pacchi ba
Li-BATT eco (Figura 6) per
una capacità elevata, co
ridotto e dimensioni cont
caratteristiche della battesono riportate nella tabella
5
NTROLLO DEL ROBOT:
crivere e dimensionare i vari blocchi
teria LiPo
hè hanno
un peso
nute. Le
ria sceltaeguente:
Figura 5: schema a blocchi generale
Figura 6: bat
he compongono il
t
eria

5/6/2018 Tesina Maturità 2011 - ROBOT ESPLORATORE (Ferrari Marco & Verona Diego) - slidepdf.com
http://slidepdf.com/reader/full/tesina-maturita-2011-robot-esploratore-ferrari-marco-verona-diego 6/34
6
REGOLATORE DI TENSIONE (LM7805):
L’integrato LM7805 è un regolatore di tensione
che fornisce in uscita una tensione stabilizzata
di 5 [V] a patto che l’ingresso sia circa il doppio
di tale valore. I valori dei condestatori e il loro
collegamento sono dati dalla casa produttrice.
Il regolatore di tensione permette di ricavaredai 12 [V] della batteria, necessari per
comandare in modo ottimale i motori,
l’alimentazione TTL compatibile necessaria ai
vari crcuiti integrati.
Per le caratteristiche tecniche dell’integrato LM7805 si rimanda al link:
www.datasheetcatalog.org/datasheet/fairchild/LM7805.pdf
Caratteristiche Tecniche:
Tensione Nominale 11,1V
Numero Elementi 3
Capacita' mAh 2000
Valore C (in scarica) 12
Corrente di scarica max 24A
Dimensioni 110 x 36 x 28 mm
Peso 185gr
Connettore di potenza Multiplex M6
Connettore di bilanciamento MPX/TP/FPTabella 1: Caratteristiche tecniche della batteria Lipo Li-BATT eco.
CIRCUITO DEL REGOLATORE DI
TENSIONE
DIDASCALIA:
VBAT: tensione prelevata dalla
batteria.
VCC (output): tensione stabilizzata
di uscita pari a 5 [V]
C1 = 0,33 [μF]
C2 = 0, 1 [μF]
output
5V
LM7805LINE VREG
COMMON
VOLTAGE
C1 C2
input
VBATT

5/6/2018 Tesina Maturità 2011 - ROBOT ESPLORATORE (Ferrari Marco & Verona Diego) - slidepdf.com
http://slidepdf.com/reader/full/tesina-maturita-2011-robot-esploratore-ferrari-marco-verona-diego 7/34
7
CIRCUITO DI CONTROLLO LIVELLO BATTERIA (LM7805):
Il circuito rappresentato compara, grazie ad un amplificatore operazionale in
configurazione comparatore, la tensione della batteria con una tensione di soglia.
L’operazionale e l’ingresso invertente devono essere alimentati con una tensionestabilizzata, che non si abbassi con lo scendere della tensione della batteria che
alimenta il robot; altrimenti il confronto di tali tensioni non avrebbe senso perché
entrambi dipendenti dal livello della batteria stessa. Grazie all’integrato LM7805
posso avere i 5 [V] costanti desiderati, finchè la batteria riamane sopra i 9 [V] circa.
Pertanto il valore di soglia, oltre la quale deve accendersi il led per segnalare il basso
livello della batteria, è stato scelto abbastanza elevato, anche per non sforzare i
motori, e vale circa 11 [V]. Non si ha una precisione elevata della tensione di soglia a
causa dell’utilizzo di resistenze di non alta
precisione, inoltre, si è dovuto adattare il
circuito ed il suo dimensionamento a valori
di resistenze poresenti in commercio. La
precisione non rappresenta comunque un
fattore decisivo per l’utilizzo di tale circuito,
esso è di sola indicazione. La tensione della
batteria viena abbassata grazie ad unpartitore in modo da rendere più semplice
il confronto con la tensione stabilizzata. Se
prevale l’ingresso non invertente, quindi la
tensione della batteria è sopra al valore
desiderato di 11 [V], l’uscita si porta in
saturazione (Vsat = Vcc = 5 [V]) e non viene
a crearsi differenza di potenziale ai capi del
diodo led che quindi rimane spento. Se
invece, la batteria scende sotto il livello di tensione prestabilito, prevale l’ingresso
invertente e l’uscita va a massa (-Vsat = Gnd = 0 [V]); di conseguenza il led si
accende per la differenza di potenziale che viene a formarsi ai suoi capi.
Dimensionamento componenti:
. .
ℎè 11 , :
V+
DIDASCALIA:
VBAT: tensione prelevata dalla batteria.
VCC: tensione prelevata dal regolatore di tensione.
R1 = 12 [kΩ]
R2 = 10 [kΩ]
RL = 330 [Ω]
VCC
TLO81
3
2
4
7
6
51
RL
LED
VBAT
R1
R2
0
PIC
CIRCUITO CONTROLLO LIVELLO BATTERIA

5/6/2018 Tesina Maturità 2011 - ROBOT ESPLORATORE (Ferrari Marco & Verona Diego) - slidepdf.com
http://slidepdf.com/reader/full/tesina-maturita-2011-robot-esploratore-ferrari-marco-verona-diego 8/34
8
+=5 =11 :
+= 2 1 + 2 ∗ : 2 1 + 2 = 511 =0,46
1 = ( ,∗), 2 = 10 1=12
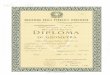
FUNZIONAMENTO SENSORE ULTRASUONI (SRF05):
Il sensore ad ultrasuoni di cui si è fatto uso è SRF05 del tipo Trig/Echo. SRF05 non è
altro che l'acronimo di Sonic Range Finder 05 e come dice il suo stesso nome è un
misuratore di distanze che sfrutta gli ultrasuoni per determinare la distanza
dall'ostacolo che ha di fronte, ed in questo caso è il quinto della serie (05) . In Figura
1 è riportata la foto del sensore. I pin sulla destra sono utilizzati solo in fase di
programmazione del dispositivo stesso ovvero per l'installazione del firmware
all'interno del PIC che controlla il sensore stesso.
Caratteristiche tecniche
Tensione operativa 5 [V]
Corrente operativa tipica 4 [mA]Frequenza 40 [KHz]
Portata 1 [cm] – 4 [m]
Impulso di ritorno Segnale TTL positivo, di durata
proporzionale
alla distanza rilevata.
Trigger di input Impulso TTL di durata minima di 10 [uS]
Modalità di funzionamento Pin singolo per trig/echo o 2 Pin SRF04
compatibile.Dimensioni 43 x 20 x H 17 [mm]
Tabella 2: caratteristiche tecniche dei sensori SRF05
Figura 7: sensore ad ultrasuoni SRF05 (modalità 2-pinTrig/Echo)

5/6/2018 Tesina Maturità 2011 - ROBOT ESPLORATORE (Ferrari Marco & Verona Diego) - slidepdf.com
http://slidepdf.com/reader/full/tesina-maturita-2011-robot-esploratore-ferrari-marco-verona-diego 9/34
9
Il principio di funzionamento del sensore ad ultrasuoni è molto semplice. Gli
ultrasuoni sono frequenze che il nostro orecchio non è in grado di percepire. Il
sensore in questione lavora alla frequenza di 40 [KHz] mentre un buon orecchio
umano percepisce suoni fino a circa 22 [KHz]. Questo significa che il nostro orecchio
non è in grado di percepire il “suono” emesso da questo sensore. Quando il segnale,emesso dal sensore, raggiunge un ostacolo, viene riflesso. Dal momento che la
velocità con cui il suono viaggia nello spazio libero, è nota1, misurando il tempo che
percorre tra l'emissione del segnale e il suo ritorno è possibile risalire alla distanza
dell'oggetto che ha causato la riflessione. Da questo si capisce che se non c'è
nessuno ostacolo non verrà rilevato nessun eco. Il sensore SRF05 possiede due
sensori ad ultrasuoni uno utilizzato come sorgente per generare la nota a 40 [KHz] e
uno utilizzato come orecchio per rilevare l'eventuale segnale di eco derivante dalla
presenza di un ostacolo. La presenza dei due sensori non è in generale obbligatoria,
sono infatti presenti sistemi con un solo sensore che funziona prima come sorgente
e poi come orecchio per captare un eventuale eco. La velocità con cui il suono
viaggia nello spazio libero viene a dipendere dall'umidità dell'aria dalla temperatura
e anche dalla pressione atmosferica. Da questo si capisce che le misure saranno
soggette ad un certo errore. In questo progetto non è prevista nessuna
autocalibrazione ma è possibile comunque ottenere una precisione intorno al cm.
Un altro fattore che può causare un deterioramento della precisione del sensore è
legata alla forma dell'oggetto che causa la riflessione stessa. Forme complesse o
troppo grandi causano riflessioni multiple che degradano la precisione del sensorestesso2. Anche in questi casi la precisione è comunque più che sufficiente in molte
applicazioni. Il sensore è utilizzabile secondo le specifiche riportate in Tabella 2 in un
range compreso tra 1 [cm] e 4 [m] anche se l'accuratezza in questi due estremi non
è elevata.
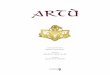
Vediamo ora in maggior dettaglio come comandare il sensore SRF05. Le linee di
controllo sono quelle sulla sinistra di Figura 7. Queste possono essere impostate per
due modalità di controllo differenti nominate 2-pin Trig/Echo e 1-pin Trig/Echo. La
prima modalità è riportata in Figura 7 ed è quella da noi adoperata; è possibile
osservare che partendo dall'alto bisogna collegare il pin 1 a Vcc, il pin 2 è per ilsegnale di output per l'echo, il pin 3 è il segnale di input per il Trig, il pin 4 è non
connesso3 mentre il pin 5 è collegato a massa.
1 La velocità del suono nello spazio libero e alla temperatura di 25°C è circa 340m/s, quindi se gridiamo la nostra voce
giungerà a 340m di distanza dopo un secondo.
2 Se si mettono troppo vicini un oggetto piccolo e uno grande il sensore tenderà a rilevare solo l'oggetto grande.3 Non va collegato nè a massa nè a Vcc poiché sulla scheda del sensore è gia' presente un resistore di pull-up.

5/6/2018 Tesina Maturità 2011 - ROBOT ESPLORATORE (Ferrari Marco & Verona Diego) - slidepdf.com
http://slidepdf.com/reader/full/tesina-maturita-2011-robot-esploratore-ferrari-marco-verona-diego 10/34
10
Per comandare il sensore in questa modalità bisogna inviare un impulso sulla linea di
Trig di almeno 10 [uS]. Quando il sensore riceve questo impulso trasmette il segnale
alla frequenza di 40 [KHz] in 8 piccoli “colpetti”, e si mette poi in attesa del segnale
di eco. Il tempo che impiega il segnale d'eco a tornare al sensore è misurabile dalla
durata dell'impulso che è presente in uscita alla linea Echo. Se la durata è più' di30ms vuol dire che l'oggetto è oltre i 4 metri della portata del sensore.
Quanto appena descritto è riassunto in Figura 8.
Figura 8: modalità 2-pin Trig/Echo e range di funzionamento
Il range di localizzazione di questo tipo di sensori è quello che vedete nella Figura 8.
MICROINTERRUTTORE A LEVETTA (FINECORSA):
Il funzionamento del finecorsa, usato come
sensore di contatto, è molto semplice. come
evidenzia il circuito, il deviatore, a riposo,
collega il pin di ingresso del PIC a massa. Se
premuta la levetta viene commutato ilcollegamento del PIC a Vcc in modo che il
microcontrollore rilevi un impulso a livello logico
alto 5[v]. Grazie a tale
impulso, ricevuto dal
microcontrollore, viene
gestito il movimento della carrucola del robot. La resistenza
è necessaria durante il test che il PIC esegue quando lo si
programma. Il microcontrollore infatti, durante tale test,
DIDASCALIA:
VCC: tensione data dal regolatore di tensione.
R1 = 10 [kΩ]
FINECORSA
R1
VCC
PIC
CIRCUITO SENSORI DI CONTATTO
Figura 9: interuttore finecorsa

5/6/2018 Tesina Maturità 2011 - ROBOT ESPLORATORE (Ferrari Marco & Verona Diego) - slidepdf.com
http://slidepdf.com/reader/full/tesina-maturita-2011-robot-esploratore-ferrari-marco-verona-diego 11/34
11
abilita tutti le uscite portandole a livello logico alto, di conseguenza, senza la
resistenza verrebbe a crearsi un cortociucuito e il programmatore (pikit2) non
consentirebbe lo scaricamento del nuovo software nel PIC.
SENSORI SEGUI LUCE (L14G1):
Il principio di funzionamento è molto efficace e semplice: se il sensore di destra
vede più luce di quello di sinistra, la tensione all’ingresso invertente del
comparatore sarà maggiore di quella presente all’ingresso non invertente, quindi il
segnale che arriverà alpic sarà un livello logico
basso e, grazie ad un
opportuno programma,
il robot procederà
girando a destra
(quindi verso la parte
più luminosa); nel caso
in cui la tensione
all’emettitore del
fototransistor sinistro
sia maggiore di quello
destro allora il segnale
di uscita del
comparatore sarà a
livello logico alto equindi il robot girerà a
sinistra. A differenza
del sistema utilizzato
per identificare la presenza di luce o meno all’ingresso della bocca del robot, in
questo sistema serve una calibrazione più precisa e le possibilità di errore sono più
alte. Questo è causato dal fatto che le distanze sono maggiori e che la luce
ambientale influenza l’intero funzionamento del sistema.
DIDASCALIA:
VCC: tensione data dal regolatore di tensione di 5 [V].
R1 = 100 [KΩ]
R2 = 4,1 [KΩ]
R3 = 41[KΩ]
R4 = 330 [Ω]
CIRCUITO SENSORI SEGUI LUCE
TL081
3
2
4
7
6
51
VCC
PIC
L14G1
R3 R4R2
L14G1_2
R1

5/6/2018 Tesina Maturità 2011 - ROBOT ESPLORATORE (Ferrari Marco & Verona Diego) - slidepdf.com
http://slidepdf.com/reader/full/tesina-maturita-2011-robot-esploratore-ferrari-marco-verona-diego 12/34
12
SENSORE LUCE BOCCA (L14G1):
Per la rilevazione degli oggetti che entrano nella “bocca” del robot abbiamo
utilizzato, in modo semplice ma efficace, un fototransistor e un operazionale in
modalità comparatore. Collegando il fototransistor in modo che la base sia funzionedella luce, si riscontra che più luce c’è, più alta è la corrente sulla base e più corrente
passa dal collettore all’emettitore, che è collegato a massa tramite un trimmer che
utilizzeremo per tarare il sensore. Il trimmer non è di precisione perché non serve
una calibrazione minuziosa dato che il sensore deve solo rilevare la presenza o
l’oscuramento, da parte dell’ eventuale oggetto, di una fascio luminoso di 5 led rossi
ad alta luminosità. I led ad alta luminosità garantiscono anche una efficace immunità
del sensore alla luce ambientale che risulata molto più debole di quella emanata da
tali led. L’emettitore del fototransistor è stato invece collegato all’ingresso
invertente dell’operazionale così che l’uscita dell’operazionale sia a livello alto solo
in presenza di una tensione, all’ingresso non invertente, maggiore di quella presente
all’ingresso invertente. Questo si riscontra quando la corrente che attraversa il
fototransistor generi una tensione ai capi del trimmer, quindi all’ingresso invertente,
minore della tensione garantita dal partitore.
Figura 10: trasduttore L14G1

5/6/2018 Tesina Maturità 2011 - ROBOT ESPLORATORE (Ferrari Marco & Verona Diego) - slidepdf.com
http://slidepdf.com/reader/full/tesina-maturita-2011-robot-esploratore-ferrari-marco-verona-diego 13/34
13
Tale partitore è necessario per mantenere, all’ingresso non invertente
dell’operazionale, una tensione di riferimento di 2,5 [V] e non 0 [V], come si
potrebbe pensare; in quanto l’emettitore del fototransistor avrà sempre una, anche
se piccola, corrente. Infine abbiamo collegato un led di alimentazione e un led in
uscita dell’operazionale per una più facile lettura dei segnali e delle tensioni presenti
nel circuito.
CIRCUITO SENSORE DI LUCE BOCCA
DIDASCALIA:
VCC: tensione data dal regolatore di tensione di 5 [V].
R1 = 100 [Ω]
R2 = 100 [KΩ]
R3 = 330 [Ω]
R4 = 330 [Ω]
R5 = 330 [Ω]
R6 = 330 [Ω]
Led rossi ad alta luminosità
Led alimentazione
attiva
TL081
3
2
4
7
6
51
VCC
PICL14G1
R1
R3
R4 R5R2
R6
Figura 11: trasduttore L14G1

5/6/2018 Tesina Maturità 2011 - ROBOT ESPLORATORE (Ferrari Marco & Verona Diego) - slidepdf.com
http://slidepdf.com/reader/full/tesina-maturita-2011-robot-esploratore-ferrari-marco-verona-diego 14/34
SERVOMOTORI:
Per i movimenti del braccio
alcune loro caratteristiche p
1. Coppia meccanica ele
2. Possibilità di controll
3. Dimensioni e peso rid
4. Assenza di circuiti di c
I servmotori scelti sono di ti
dalle nostre possibilità: L’ es
dei tre servo adoperati men
funzionamento della carruc
Funzionamento generale de
In un servomotore l' energi
continua, il quale, qualora
cioè, il positivo con il nega
alberino, tramite una ridu
connesso il perno millerigh
avvitare la squadretta di cominuscolo potenziometro,
posizione assunta
squadretta. Il servo
connesso al circuito di c
tramite un cavetto tripol
conduttori rosso porta la t
di alimentazione provenie
regolatore di tensione LM7
quello giallo è invece ciclicpresente il segnale di coma
durata compresa tra 1 e 2
piccolo potenziometro,
sappiamo co
meccanicamente alla squa
è invece elettricamente co
ad un circuito monosta
tarato per generare, quand
impulsi di durata variabile
circuito di controllo (PIC
14
meccanico abbiamo deciso di adoper
referibili ai normali motori in corrente
v
ata a prezzi accessibili.
di precisione del movimento.
otti.
ontrollo e potenza esterni al servo.
po analogico, in quanto il costo dei se
cursione massima di rotazione tipica
re il terzo servo è multigiri e sarà utili
la che solleva ed abbassa la pinza.
l servo:
meccanica viene fornita da un micro
se ne inverta la polarità di alimentaz
ivo), è in grado di invertire il verso
zione effettuata da un treno di pi
, che fuoriesce dal corpo del servo, su
ando. A questo perno è anche collegche quindi varia la propria resistenz
dalla
viene
ntrollo
are: il
nsione
te dal
05, su
mentendo (di
sec). Il
che
llegato
dretta,
nnesso
bile e
la squadretta raggiunge gli estremi
a 1 a 2 msec. Questo segnale, e que
nel nostro caso), vengono invia
Figura 12: interno serv
re tre servi, per
conitua:
vi digitali usciva
di 180° per due
zzato per il
-motore a corrente
ione (scambiando,
i rotazione; al suo
coli ingranaggi, è
l quale siamo soliti
ato l'alberino di unin funzione della
ella sua rotazione,
llo proveniente dal
i ad un circuito
m
otore

5/6/2018 Tesina Maturità 2011 - ROBOT ESPLORATORE (Ferrari Marco & Verona Diego) - slidepdf.com
http://slidepdf.com/reader/full/tesina-maturita-2011-robot-esploratore-ferrari-marco-verona-diego 15/34
15
"comparatore", che ne raffronta la durata temporale; se l'impulso, chiamiamolo "di
posizione" differisce da quello "di controllo", il comparatore aziona il motore,
fornendo allo stesso la polarità idonea a farlo girare nel giusto verso, finché non
verificherà che la durata dei due impulsi è divenuta uguale. In altre parole, la logica
di controllo del servo "insegue" il segnale proveniente dal radiocomando, finché nonriesce a generarne uno uguale; e, nel realizzare questa condizione, ottiene proprio il
risultato ricercato.
Caratteristiche del servo:
Oltre alle dimensioni e al peso, vengono invariabilmente fornite due sole
caratteristiche operative: velocità e coppia. Ma questi valori, pur di fondamentale
importanza e facile interpretazione, non ne caratterizzano completamente la
qualità; come in ogni servomeccanismo, bisogna prendere in esame anche due altri
parametri fondamentali: la sensibilità e la precisione. Definiamo la sensibilità (in
modo molto generico) come la capacità di reagire ad una minima variazione del
segnale di comando: quanto più la variazione percepita sarà piccola, tanto più
elevata la sensibilità del sistema. La precisione, invece, può essere definita come la
capacità del servo di riportarsi sempre nella stessa posizione, qualora riceva un
identico segnale di comando; e ciò indipendentemente dal variare delle condizioni
ambientali (temperatura, vibrazioni...), dal mutare del carico meccanico (resistenzaopposta dalle superfici mobili comandate) e dalle modalità di operazione (ad
esempio, se il ritorno in posizione del servo avvenga con movimento orario, oppure
antiorario): tanto più piccolo sarà l'errore commesso, tanto migliore la precisione.
Queste due caratteristiche rappresentano in realtà gli incubi ricorrenti per tutti i
progettisti di servomeccanismi in genere; si dimostra infatti matematicamente (si
chiamavano Bode e Nyquist gli studiosi che hanno gettato le basi per effettuare
calcoli in materia) che l'incremento della sensibilità e/o della precisione avviene
sempre a scapito della stabilità del sistema. Ciò significa che, cercando di migliorare
oltre un dato valore questi parametri, si va inevitabilmente incontro ad un grave
degrado nelle prestazioni; nel caso del servomotore, la squadretta inizierebbe ad
oscillare avanti e indietro intorno alla posizione da raggiungere o, nel caso peggiore,
finirebbe a fondo corsa, senza rispondere più ai comandi. Come può allora il
costruttore di un servo migliorare la qualità del suo prodotto? I fattori determinanti
sono:
1) l'impiego d'ingranaggi metallici lavorati con precisione, in modo da ridurre alminimo i giochi e l'usura meccanica;

5/6/2018 Tesina Maturità 2011 - ROBOT ESPLORATORE (Ferrari Marco & Verona Diego) - slidepdf.com
http://slidepdf.com/reader/full/tesina-maturita-2011-robot-esploratore-ferrari-marco-verona-diego 16/34
16
2) l'adozione di un potenziometro di alta precisione, compensato rispetto alle
variazioni di temperatura ed efficacemente protetto dalle influenze ambientali;
3) la realizzazione di circuiti elettronici aventi stabilità elevata e deriva termica
minima.
Comandare il servo:
Nonostante ci sia una notevole
somiglianza, il segnale di
controllo dei Servo non è
assolutamente un segnale PWM.
La notazione corretta è PCM
ovvero Pulse-Code Modulation
che, letteralmente, si puòtradurre come Modulazione
Codificata di Impulsi. Per
convincersi è sufficiente
confrontare i due segnali con un
normale oscilloscopio. Il
funzionamento del Servo è
molto semplice. Come si può osservare, dallo schema a blocchi, il segnale di
Controllo arriva all'Elettronica. Questa lo confronta con il valore presente sul
Potenziometro e decide se deve fare ruotare il motore ed in che direzione.Per
comandare un Servo occorre, tramite il filo di controllo, inviare allo stesso una serie
di impulsi TTL. La durata del singolo impulso determina la posizione dell'asse di
uscita. Il tempo di pausa, tra un impulso ed il successivo, può variare entro ampi
limiti senza che si abbia una perdita di controllo del Servo. Dopo avere data una
descrizione qualitativa cominciamo a dare delle indicazioni quantitative stabilendo
dei precisi valori numerici.La durata dell'impulso può variare tra un minimo di 1mS
ed un massimo di 2mS. In funzione della durata di questo impulso il Servo farà
ruotare il perno di uscita, solidale con il potenziometro, fino al raggiungimento delcompleto equilibrio.
Relazione esistente trà larghezza degli
impulsi e rotazione:
La durata minima e massima
dell'impulso corrisponde ai due estremi
dell'escursione del Servo. L'impulso della
durata di 1,5mS corrisponde allaposizione centrale, o mediana, del
Servo. Bisogna ricordare che questo
Figura 13: interno servomotore
Figura 14: rotazione albero servomotore

5/6/2018 Tesina Maturità 2011 - ROBOT ESPLORATORE (Ferrari Marco & Verona Diego) - slidepdf.com
http://slidepdf.com/reader/full/tesina-maturita-2011-robot-esploratore-ferrari-marco-verona-diego 17/34
17
impulso deve essere continuamente rinfrescato (ripetuto) altrimenti il Servo, non
essendo più governato, si porterà a riposo. Questo significa che non potrà più
garantire di mantenere la posizione e l'albero potrà essere mosso dalle forze casuali
presenti sul carico applicato. La durata della Pausa, tra un impulso ed il successivo,
deve essere compresa tra un minimo di 10mS ed un massimo di 40mS. La duratatipica della Pausa tra gli impulsi è di 20mS che sono pari a 50Hz.
Per il servo multigiri, invece, la variazione della durata dell’impulso di comando
determina, oltre alla direzione di rotazione, la velocità con cui il servo ruota.
Caratteristiche dei servi usati:
Caratteristiche HS – 475 HB
Tipo motore 3 poli ferrite
Cuscinetti a sfera 2
Ingranaggi Resina Karbonite
Coppia [Kg*cm] 5,5 (6 Volts)
Velocità [Sec./40°] 0,12 (6 Volts)
Velocità [Sec/60°] 0,18 (6 Volts)
Dimensioni [mm] 41 x 20 x 37
Peso [g] 39Tabella 3: caratteristiche HS - 475 HB e foto del servo
Tabella 4: caratteristiche HSR - 1422 CR e foto del servo
Caratteristiche HSR – 1422CR
Tipo di controllo Standard RC – 1,5 [ms] servo
fermo
Coppia [Kg*cm] 2,8
Velocità 43.4 rpm (giri al minuto)
variabileSenso di rotazione Orario / Antiorario
Dimensioni [mm] 40.6 x 19.8 x 36.6
Peso [g] 41,7

5/6/2018 Tesina Maturità 2011 - ROBOT ESPLORATORE (Ferrari Marco & Verona Diego) - slidepdf.com
http://slidepdf.com/reader/full/tesina-maturita-2011-robot-esploratore-ferrari-marco-verona-diego 18/34
MOTORI IN CORRENTE CON
I motori in corrente contin
carcassa metallica contene
dalla stessa e da un rotore,sostiene delle bobine col
rotazione del motore.
aumentando il numero di la
Figura 15: motore
18
INUA E DRIVER DI POTENZA (L298):
ua (dc) sono costituiti da uno stato
te uno o più magneti che creano un
nche esso costituito da una carcassalegate fra loro a livello del colletto
aliment
campo
effetto
poli
repulsi
stesso
genera
metteappena
in mot
operan
del
alimen
manie
nuovi
perpe
dello
quindi
La fluttuazione della coppia risu
me del collettore.
La cop
motore
didipend
dall’alt
caratte
per
motore
lineare
conosc
vuoto
spunto
i
n corrente continua
e formato da una
campo all’interno
metallica , il qualere che una volta
ate generano un
magnetico. Per
dell’attrazione dei
ontrari e della
ne dei poli di
egno, sul rotore si
una coppia che lo
in moto. Nonil rotore si mette
alcune spazzole,
o su lame diverse
collettore,
tando le bobine in
a che l’asse dei
poli del rotore sia
comunque
dicolare a quello
statore, causando
la continua
ltante diminuisce
pia che fornisce il
e la sua velocità
otazione sononti l’una
a. Si tratta di una
ristica essenziale
uesto tipo di
. Tale relazione è
e permette di
re sia la velocità a
che la coppia di
del motore.

5/6/2018 Tesina Maturità 2011 - ROBOT ESPLORATORE (Ferrari Marco & Verona Diego) - slidepdf.com
http://slidepdf.com/reader/full/tesina-maturita-2011-robot-esploratore-ferrari-marco-verona-diego 19/34
Da questo grafico si deduce
Le curve coppia-velocità e
del motore. La tensione diun impiego continuo di tal
ambiente di 20°C. E’ pera
diversa, in generale compre
se lo si sottoalimenta il mot
più potente ma si riscald
alimentazione comprese t
parallela a quella nominale.
vuoto varieranno dello stes
utile massima del motore, q
Un’altra caratteristica impo
conoscere la corrente assor
19
la curva della potenza utile:
otenza utile dipendono dalla tension
limentazione fornita per un certo momotore in funzionamento nominal
ltro possibile alimentare il motore
sa tra -50% e +100% della tensione pr
o
re sarà meno potente mentre se lo s
erà maggiormente . Per variazioni
a -25% e +50%, la nuova curva c
Di conseguenza, sia la coppia di spun
o valore percentuale n%. Per quanto
uesta si ottiene :
tante è data da grafico coppia-corren
ita a vuoto, oppure a motore bloccat
e di alimentazione
tore corrisponde aalla temperatura
con una tensione
evista: ovviamente
i sovralimenta sarà
della tensione di
ppia-velocità sarà
to che la velocità a
iguarda la potenza
e,che permette di
.

5/6/2018 Tesina Maturità 2011 - ROBOT ESPLORATORE (Ferrari Marco & Verona Diego) - slidepdf.com
http://slidepdf.com/reader/full/tesina-maturita-2011-robot-esploratore-ferrari-marco-verona-diego 20/34
20
Il rapporto tra la potenza meccanica utile che può essere fornita e la potenzaassorbita è detto rendimento. I motori in corrente continua sono costruiti per
funzionare permanentemente a velocità prossime alla propria velocità a vuoto, che
essendo nella maggior parte dei casi troppo elevata si applica un motoriduttore.
MOTORIDUTTORE:
Le nozioni da sapere per il nostro scopo sono abbastanza banali e approssimabili
senza problemi. I motori debbono fornire una forza maggiore del prodotto massaper accelerazione, più altre forze che si oppongono al moto come quelle di attrito al
rotolamento delle ruote (attrito volvente) .
Supponendo che il robot non debba pesare complessivamente più di 2[kg], si voglia
un’accelerazione a = 0.38[m/s^2] , il raggio delle ruote è 3,65[cm] e approssimando
a zero le forze che si oppongono al moto :
= ∗ ∗ → = 0 , 3 8 ∗ 2 ∗3,65 =2,74∗

5/6/2018 Tesina Maturità 2011 - ROBOT ESPLORATORE (Ferrari Marco & Verona Diego) - slidepdf.com
http://slidepdf.com/reader/full/tesina-maturita-2011-robot-esploratore-ferrari-marco-verona-diego 21/34
21
Essendo due i motori che muoveranno il robot, il peso si ripartirà metà su un motore
e metà sull’altro (sempre in situazioni ideali) dunque la coppia di ciascun motore
dovrà essere:
2 =
2,74
2 =1,37 ∗
Per sicurezza, tenendo anche conto dell’approssimazione a zero delle forze
resistenti, si è scelto un motoriduttore con una coppia di 1,5[N*cm].
La seguente tabella riporta le caratteristiche del motoriduttore in questione:
Tabella 5: caratteristiche motori DC
A questo punto, conoscendo anche il numero di RPM, è possibile calcolare lavelocità di punta moltiplicando il numero di giri al secondo dell’asse per la

5/6/2018 Tesina Maturità 2011 - ROBOT ESPLORATORE (Ferrari Marco & Verona Diego) - slidepdf.com
http://slidepdf.com/reader/full/tesina-maturita-2011-robot-esploratore-ferrari-marco-verona-diego 22/34
22
circonferenza della ruota. Dividendo il numero di RPM (giri al minuto) per 60 si
ottengono il numero di giri al secondo.16560 =2,75
=2=0,73
= ∗ →2,75
∗0,73 =2,0/
PILOTAGGIO MOTORI DC:
Il pilotaggio più semplice per un motore è quello ON-OFF che permette di mandare il
motore alla massima velocità oppure fermarlo. Il circuito risulta abbastanzasemplice e consiste in un interruttore ( Transistor,relè ecc) in serie al motore e un
diodo di ricircolo sul motorino (si ricorda che il motore in DC è un carico induttivo)
per evitare danni sul resto del circuito. Se si vuole invertire anche il verso di
rotazione si ricorre ad un “ponte H”, che consente di invertire il verso della corrente
che attraversa il motore stesso. In seguito è riportato lo schema semplificato di un
ponte H:
In questo caso è chiusa la coppia diinterruttori A2 e B1 consentendo alla
corrente di circolare in un
verso,viceversa interruttori A1 e B2 la
corrente circolerebbe in un’altro
verso. In questo caso se fosse chiusa
la coppia di interruttore A1 e B1 la
corrente circolerebbe in un altro
verso.
L298:
L’l298 è un driver per motori DC o stepper,costituito da due ponti H integrati,che
supportano un elevato voltaggio (46V) ed elevate correnti (2A per ponte) e che
possono essere pilotati con livelli in logica TTL. Ciascun ponte può essere disabilitato
Figura 16: schema semplificato di un ponte H

5/6/2018 Tesina Maturità 2011 - ROBOT ESPLORATORE (Ferrari Marco & Verona Diego) - slidepdf.com
http://slidepdf.com/reader/full/tesina-maturita-2011-robot-esploratore-ferrari-marco-verona-diego 23/34
23
o abilitato tramite il relativo piedino di enable. Per il comando di tale integrato
inviamo attraverso il pic due pin per motore: se hanno valore uguale il motore sta
fermo; se hanno valore differente il motore si muove in avanti o indietro a seconda
che il bit alto sia il primo o il secondo. La velocità dei motori è invece comandata
mediante segnale di tipo pwm proporzionale ai dati rilevati dai sensori ultrasuoni,senza doverne indicare il valore via software. Semplicemente: se rileva una distanza
maggiore il sensore ad ultrasuoni destro, il motore relativo rimarrà fermo, viceversa
se rileva una distanza maggiore il sensore ultrasuoni sinistro. Il continuo alternarsi di
acceso/spento di comando ai motori, in funzione dei dati rilevati dai due sensori,
crea un segnale pwm che regola la velocità dei motori. Grazie al motoriduttore
incorporato nel motore, non è stato necessario modificare tale parametro a livello
software, in quanto le velocità in gioco sono molto basse e il robot ha il tempo di
girare nella giusta direzione senza una risposta immediata.
Figura 17: circuito interno L298

5/6/2018 Tesina Maturità 2011 - ROBOT ESPLORATORE (Ferrari Marco & Verona Diego) - slidepdf.com
http://slidepdf.com/reader/full/tesina-maturita-2011-robot-esploratore-ferrari-marco-verona-diego 24/34
Caratteristiche tecniche d
24
ell’L298:
Tabella 6: caratteristiche L298
Figura 18: scheda di potenza dei motori

5/6/2018 Tesina Maturità 2011 - ROBOT ESPLORATORE (Ferrari Marco & Verona Diego) - slidepdf.com
http://slidepdf.com/reader/full/tesina-maturita-2011-robot-esploratore-ferrari-marco-verona-diego 25/34
PIC 18F458:
Tabella 7: pin utilizzati
Figura 19: pin PIC 18F458
25
Figura 20: circui
Figura 21: schema a blocchi
t
o di controllo (PIC 18F458)
interno del PIC 18F458

5/6/2018 Tesina Maturità 2011 - ROBOT ESPLORATORE (Ferrari Marco & Verona Diego) - slidepdf.com
http://slidepdf.com/reader/full/tesina-maturita-2011-robot-esploratore-ferrari-marco-verona-diego 26/34
26
/*************************************************************************************************************** pic usato: 18f458 quarzo: 40 [MHz] motori cc: collegamenti: motore destro RB0 e RB1 pin 33 e 34
motore sinistro RB2 e RB3 pin 35 e 36 servomotore pinza: Vcc (rosso)
Gnd (nero)segnale (giallo) RC2 pin 17
servomotore base: Vcc (rosso)Gnd (nero) segnale (giallo) RB4 pin 37
servomotore carrucola: Vcc (rosso)Gnd (nero) segnale (giallo) RC3 pin 18
sensori ultrasuoni: SRF05 collegamenti: Vcc (rosso)
Echo (verde) RC1 e RC5 pin 16 e 24 Trigger (bianco/verde) RC0 e RC4 pin 15 e 23 Gnd (bianco)
sensore bocca: / collegamenti: Vcc (rosso)
Gnd (bianco) input (blu) output (bianco/blu) RC7 pin 26
sensori luce: / collegamenti: Vcc (rosso) Gnd (bianco) input (blu) output (bianco/blu) RB7 pin 40
fine corsa: / collegamenti: Vcc (rosso)
Gnd (bianco) alto (bianco/giallo) RB5 pin 38 basso (bianco/giallo) RB6 pin 39
*************************************************************************************************************/
#include <htc.h> //include la libreria per i comandi
//VALORI DEFINE ******************** #define TEMP_i 10 //numero cicli for (variabile i) #define PAUSA 320 //pausa di circa 20 [ms] tra un impulso al servomotore e un altro #define TRIGGER 25 //impulso trigger sensori ultrasuoni di 10 [us] #define ECHO 50 //controlla il valore di echo ogni 20 [us]
// FUNZIONI ******************** void apri_pinza(); //apre la pinza void stringi_pinza(); //chiude la pinza void solleva_pinza(); //solleva la pinza void abbassa_pinza(); //abbassa la pinza void ruota_pinza_o(); //ruota la pinza in senso orario void ruota_pinza_a(); //ruota la pinza in senso antiorario void avanti(); //robot avanti dritto void indietro(); //robot indietro dritto void sinistra(); //robot gira sinistra void destra(); //robot gira destra void fermo(); //robot fermo
//DICHIARAZIONE VARIABILI ******************** int remember; //serve per indicare se l'oggetto preso è il primo o il secondo int d; //conta gli impulsi di us dall'invio del segnale di trigger del sensore ultrasuoni sinistro int z; //durata impulso di echo da sensore ultrasuoni destro int s; //conta gli impulsi di us dall'invio del segnale di trigger del sensore ultrasuoni sinistro int x; //durata impulso di echo da sensore ultrasuoni sinistro int i; //variabile di conteggio cicli for int pinza; //variabile di conteggio cicli for int robot; //variabile di conteggio cicli for(utilizzo di for di secondo livello) int control; //serve per verificare che sia passato sufficiente tempo per gli ultrasuoni int remo; //serve per verificare che siano inviati sufficienti impulsi per gli ultrasuoni int minore=100; //serve per trovare la lattina più vicina int remember=0; //serve per verificare che siano inviati sufficienti impulsi per gli ultrasuoni int ostia=0; //serve ad accedere alla parte di programma specifica //a,b,c,e sono usate come label quindi non disponibili per evetuali variabili

5/6/2018 Tesina Maturità 2011 - ROBOT ESPLORATORE (Ferrari Marco & Verona Diego) - slidepdf.com
http://slidepdf.com/reader/full/tesina-maturita-2011-robot-esploratore-ferrari-marco-verona-diego 27/34
27
//PROGRAMMA PRINCIPALE ******************** main(){
//SETTAGGIO REGISTRI ******************** TRISA=0; //PORTA in uscita TRISB=0b11100000; //RB5,6,7 ingresso (FINE CORSA UP, DOWN, RITORNO) TRISC=0b10100010; //RC1 e RC5 in ingresso (ECHO DX e ECHO SX) TRISD=0b00000000; //PORTD in uscita TRISE=0; //PORTE in uscita T0CON=0b11000001; //prescaler=4 : frequenza=fosc/(4*prescaler) //POSIZIONE INIZIALE PINZA ********************
inizio: fermo(); //ferma i movimenti delle ruote del robot for(robot=0;robot<45;robot++){ //ruota il braccio e stringi pinza
stringi_pinza(); ruota_pinza_a();
} while(PORTBbits.RB6==0){ //abbassa finché non viene premuto il finecorsa inferiore
abbassa_pinza(); } for(robot=0;robot<30;robot++){
apri_pinza(); }pinza=0;
//GIRA IL ROBOT E RILEVA LA LATTINA PIU' VICINA ******************** if(ostia==0){
while(pinza<=150){ //aspetta che il robot faccia 360° for(i=0;i<10000;i++){ //gira con piccoli scatti e ogni scatto controlla la vista
PORTBbits.RB0=1; //motore sinistro avanti PORTBbits.RB1=0; //motore sinistro avanti PORTBbits.RB2=0; //motore destro indietro PORTBbits.RB3=1; //motore destro indietro
} pinza++; //rilevazione distanza d=0; //azzera la variabile di conteggio control=0; //azzera control remo=0; //azzera remember
//GENERAZIONE IMPULSO DI TRIGGER(utilizza un solo sensore ultrasuoni) PORTCbits.RC0=1; //invia impulso di trigger TMR0L=0; //azzera timer while(TMR0L!=125); //durata impulso di trigger 10us PORTCbits.RC0=0; //spegni impulso di trigger
//ALGORITMO RICEZIONE SEGNALE DI ECHO P: if(PORTCbits.RC1==1){ //se il segnale di echo dal sensore è arrivato al pic
while(TMR0L!=125); //delay di 50us - 125 d++; //conta quanti impulsi da 50us ci stanno finché l'echo è 1 remo++; // incremento remember control=1; //quando control è a 1 allora l'echo è andato a livello alto goto p;
} else{ //se il segnale di echo non è arrivato al pic remo++; //incremento remember
if(control==0){ //l'echo è ancora a livello basso goto p;
}else{
if(remo<700){ //se ho fatto meno di 700 controlli continuo goto p;
} else{ //MEMORIZZA L'OGGETTO PIU' VICINO
if(d<(minore+1)){ minore=d;
} }
} } //chiudi else
} //chiudi while } //chiudi ostia=0 //ferma il robot per evitare eventuali errori for(i=0;i<60;i++){
for(pinza=0;pinza<3000;pinza++){

5/6/2018 Tesina Maturità 2011 - ROBOT ESPLORATORE (Ferrari Marco & Verona Diego) - slidepdf.com
http://slidepdf.com/reader/full/tesina-maturita-2011-robot-esploratore-ferrari-marco-verona-diego 28/34
28
fermo(); }
}
//GIRA SU SE STESSO FINCHÉ NON RITROVA L'OGGETTO PIÙ VICINO GIÀ MEMORIZZATO ******************** while(1){
//rilevazione distanza d=0; //azzera la variabile di conteggio control=0; //azzera control remo=0; //azzera remember
//GENERAZIONE IMPULSO DI TRIGGER(utilizza un solo sensore ultrasuoni) PORTCbits.RC0=1; //invia impulso di trigger TMR0L=0; //azzera timer while(TMR0L!=125); //durata impulso di trigger 10us PORTCbits.RC0=0; //spegni impulso di trigger
//ALGORITMO RICEZIONE SEGNALE DI ECHO y: if(PORTCbits.RC1==1){ //segnale di echo dal sensore è arrivato al pic
while(TMR0L!=125); //delay di 50us - 125 d++; //a conta quanti impulsi da 50us ci stanno finché l'echo è a 1 remo++; //incrementto remember control=1; //quando control è a 1 significa che echo è andato a 1 goto y;
} else{ //se il segnale di echo non è arrivato al pic
remo++; //incremento remoif(control==0){ //l'echo è ancora a livello basso
goto y; }else{
if(remo<700){ //se ho fatto meno di 700 controlli continuo goto y;
} else{
if(d<=minore){ //se vede l'oggetto più vicino smette di girare ostia=1; goto vai;
} else{ //continua a girare for(i=0;i<10000;i++){
PORTBbits.RB0=1; //motore sinistro avanti PORTBbits.RB1=0; //motore sinistro avanti PORTBbits.RB2=0; //motore destro indietro PORTBbits.RB3=1; //motore destro indietro
} }
} } //chiudi else
} //chiudi else(se il segnale non è ritornato al pic) } //chiudi while
vai: //INIZIO RICERCA E PRELIEVO OGGETTI ******************** if(ostia==1){
while(1){ //ciclo infinito if(PORTCbits.RC7==0){ //se la bocca del robot è libera //CERCA OGGETTO ********************
//rilevazione distanza d=0; //azzera la distanza destra s=0; //azzera la distanza sinistra
//GENERAZIONE IMPULSO DI TRIGGER (SENSORE DESTRO) PORTCbits.RC4=1; //invia impulso di trigger sensore destro TMR0L=0; //azzera timer while(TMR0L!=TRIGGER); //durata impulso di trigger 10us PORTCbits.RC4=0; //spegni impulso di trigger sensore destro
//ALGORITMO RICEZIONE SEGNALE DI ECHO (SENSORE SINISTRO) a: if(PORTCbits.RC1==1){ //segnale di echo dal sensore è arrivato al pic
while(TMR0L!=ECHO); //delay di 6us corrispondenti ad 1mm s++; //a conta quanti impulsi ci stanno finché l'echo è a livello alto x=s; //x contiene la distanza massima rilevata dal sensore sinistro goto a;
}

5/6/2018 Tesina Maturità 2011 - ROBOT ESPLORATORE (Ferrari Marco & Verona Diego) - slidepdf.com
http://slidepdf.com/reader/full/tesina-maturita-2011-robot-esploratore-ferrari-marco-verona-diego 29/34
29
//GENERAZIONE IMPULSO DI TRIGGER (SENSORE SINISTRO) PORTCbits.RC0=1; //invia impulso di trigger sensore sinistro TMR0L=0; //azzera timer while(TMR0L!=TRIGGER); //durata impulso di trigger 10us PORTCbits.RC0=0; //spegni impulso di trigger sensore sinistro
//ALGORITMO RICEZIONE SEGNALE DI ECHO (SENSORE DESTRO)
b: if(PORTCbits.RC5==1){ //segnale di echo dal sensore destro è arrivato al pic while(TMR0L!=ECHO); //delay di 6us corrispondenti ad 1mm d++; // conta quanti impulsi l'echo è a livello alto z=d; //z contiene la distanza massima rilevata dal sensore destro goto b;
}
//CONFRONTO DISTANZE RILEVATE if((d<600)&&(s<600)){ //se entrambi i sensori oggetto < 600
if(x<z){ //se la distanza dal sensore sx è < di quella del sensore dx sinistra();
} if(x>z){ //se la distanza dal sensore dx è < di quella del sensore sx
destra(); } if(x==z){ //se la distanza rilevata dai sensore è uguale
avanti(); } } else{ //se non vedo oggetti nelle vicinanze vado dritto
avanti(); }
}
else{ //se l'oggetto è nella bocca avanti un secondo e fermati //RECUPERO OGGETTO ******************** for(i=0;i<TEMP_i;i++){
for(pinza=0;pinza<3000;pinza++){fermo();
} } for(i=0;i<TEMP_i;i++){
for(pinza=0;pinza<3000;pinza++){avanti();
} }for(i=0;i<TEMP_i;i++){
for(pinza=0;pinza<2000;pinza++){fermo();
} } //STRINGI PINZA E SOLLEVALA while(PORTBbits.RB5==0){
stringi_pinza(); solleva_pinza();
} //RUOTA BRACCIO(in funzione di remember) E STRINGI PINZA for(robot=0;robot<45;robot++){
stringi_pinza(); //POSIZIONE OGGETTO 1 (DIETRO) if(remember==0){ //se è il primo oggetto che trovi mettilo dietro
//RUOTA BASE (ORARIO) for(i=0;i<TEMP_i;i++){ //invia al servomotore un impulso di circa 1,9 [ms]
for(pinza=0;pinza<50;pinza++){ PORTBbits.RB4=1;
} } for(i=0;i<TEMP_i;i++){ //pausa tra gli impulsi inviati di circa 20ms
for(pinza=0;pinza<PAUSA;pinza++){ PORTBbits.RB4=0;
} }
} //POSIZIONE OGGETTO 2 (DESTRA) if(remember==1){ //se è il secondo oggetto che trovi mettilo a destra //RUOTA BASE (ORARIO)
for(i=0;i<TEMP_i;i++){ //invia al servomotore un impulso for(pinza=0;pinza<29;pinza++){
PORTBbits.RB4=1;

5/6/2018 Tesina Maturità 2011 - ROBOT ESPLORATORE (Ferrari Marco & Verona Diego) - slidepdf.com
http://slidepdf.com/reader/full/tesina-maturita-2011-robot-esploratore-ferrari-marco-verona-diego 30/34
30
} } for(i=0;i<TEMP_i;i++){ //pausa tra gli impulsi inviati di circa 20ms
for(pinza=0;pinza<PAUSA;pinza++){ PORTBbits.RB4=0;
} }
} //chiudi remember
} //chiudi ciclo per far ruotare la pinza //ABBASSA E STRINGI PINZA while(PORTBbits.RB6==0){
stringi_pinza(); abbassa_pinza();
}
//INIZIO RICERCA BASE ******************** if (remember>=1){ //se ha due lattine ritorna alla base con la pinza sulla seconda destra
ostia=2; goto e;
}
//SOLLEVA E APRI PINZA while(PORTBbits.RB5==0){ apri_pinza();
solleva_pinza(); }
//RUOTA (ANTIORARIO) E STRINGI PINZA for(robot=0;robot<45;robot++){
stringi_pinza(); ruota_pinza_a();
}
//POSIZIONE ORIGINARIA while(PORTBbits.RB6==0){ //finchè il fine corsa basso non viene attivato
abbassa_pinza(); } for(robot=0;robot<45;robot++){
apri_pinza(); } remember++; //incrementa remember ostia=0; //serve per far ripartire dall'inizio goto inizio; //il robot comincerà il programma dall'inizio
}} //chiudi whlie ostia=1
} //chiudi ostia=1
//ALGORITMO RICERCA BASE ******************** e:
if(ostia==2){ while(1){
while(1){ //prima incontra base poi esce dal while e deposita lattine if(PORTBbits.RB7==0){ //in base ai sensori luce gli arriva un segnale
for(i=0;i<1000;i++){ destra(); }
} else{
for(i=0;i<1000;i++){ sinistra();
} } //rilevazione distanza d=0; //azzera la variabile di conteggio control=0; //azzera control remo=0; //azzera remember
//GENERAZIONE IMPULSO DI TRIGGER PORTCbits.RC0=1; //invia impulso di trigger TMR0L=0; //azzera timer while(TMR0L!=125); //durata impulso di trigger 10us PORTCbits.RC0=0; //spegni impulso di trigger

5/6/2018 Tesina Maturità 2011 - ROBOT ESPLORATORE (Ferrari Marco & Verona Diego) - slidepdf.com
http://slidepdf.com/reader/full/tesina-maturita-2011-robot-esploratore-ferrari-marco-verona-diego 31/34
31
//ALGORITMO RICEZIONE SEGNALE DI ECHO q: if(PORTCbits.RC1==1){ //segnale di echo dal sensore è arrivato al pic
while(TMR0L!=125); //delay di 50us - 125 d++; //a conta quanti impulsi ci stanno finché l'echo è a livello alto remo++; //ogni volta che controllo incrementto remo control=1; //quando control è a 1 significa che echo è a livello alto
goto q; } else{ / /se il segnale di echo non è arrivato al pic
remo++; //incremento remember if(control==0){ //se control significa che l'echo è ancora andato a livello bass
goto q;}else{ //altrimenti
if(remo<700){ //se ho fatto meno di 700 controlli continuo goto q;
} else{
if(d<=2) { //se vedi la base a pochi centimetri goto mucca;
} }
}
} } //chiudi while sensore
mucca: //BASE TROVATA ******************** fermo();
//SOLLEVA STRINGENDO PINZA(la pinza si trova ancora nella 2 posizione(a destra)) while(PORTBbits.RB5==0){ //tira su tutto e stringi(la pinza è già nella posizione destra)
stringi_pinza(); solleva_pinza();
}
//RUOTA (ANTIORARIO) STRINGENDO PINZA for(robot=0;robot<45;robot++){
stringi_pinza(); ruota_pinza_a();
}
//ABBASSA STRINGENDO PINZA while(PORTBbits.RB6==0){
stringi_pinza(); abbassa_pinza();
}
//APRI PINZA for(robot=0;robot<45;robot++){
apri_pinza(); }
//DEPOSITA SECONDA LATTINA SPOSTANDOSI INDIETRO for(i=0;i<10;i++){ for(pinza=0;pinza<32000;pinza++){
indietro(); }
}
//si sposta più indietro e deposita l'altra lattina fermo(); //SOLLEVA PINZA while(PORTBbits.RB5==0){
solleva_pinza(); } //RUOTA PINZA (ORARIO) for(robot=0;robot<45;robot++){
for(i=0;i<TEMP_i;i++){ //invia al "servomotore base" un impulso di circa 1,9 [ms]
for(pinza=0;pinza<50;pinza++){PORTBbits.RB4=1;
}} for(i=0;i<TEMP_i;i++){ //pausa tra gli impulsi inviati al "servomotore base" di circa 20ms

5/6/2018 Tesina Maturità 2011 - ROBOT ESPLORATORE (Ferrari Marco & Verona Diego) - slidepdf.com
http://slidepdf.com/reader/full/tesina-maturita-2011-robot-esploratore-ferrari-marco-verona-diego 32/34
32
for(pinza=0;pinza<PAUSA;pinza++){ PORTBbits.RB4=0;
} }
}
//ABBASSA PINZA(GIA' APERTA)
while(PORTBbits.RB6==0){ abbassa_pinza(); }
//SOLLEVA STRINGENDO PINZA while(PORTBbits.RB5==0){
stringi_pinza(); solleva_pinza();
}
//RUOTA (ANTIORARIO) STRNGENDO PINZA for(robot=0;robot<45;robot++){
stringi_pinza(); ruota_pinza_a();
}
//ABBASSA STRINGENDOLA PINZA while(PORTBbits.RB6==0){
stringi_pinza(); abbassa_pinza();
} for(robot=0;robot<45;robot++){
apri_pinza(); } for(pinza=0;pinza<100;pinza++){
for(i=0;i<10000;i++){ indietro();
} }
//SI GIRA E CONTINUA LA RICERCA DELLE LATTINE for(pinza=0;pinza<80;pinza++){
for(i=0;i<10000;i++){ PORTBbits.RB0=1; //motore sinistro avanti PORTBbits.RB1=0; //motore sinistro avanti PORTBbits.RB2=0; //motore destro indietro PORTBbits.RB3=1; //motore destro indietro
} } ostia=0; //necessario per ripartire il programma dall'inizio remember=0; //settaggio necessario per prendere 2 nuove lattine goto inizio; //riparte dall'inizio
} //chiudi while(ostia=2) } //chiudi ostia=2
} //chiudi int
//FUNZIONI ********************
//MOVIMENTI PINZA *******************************
//APRI PINZA void apri_pinza(){
for(i=0;i<TEMP_i;i++){ //invia al "servomotore pinza" un impulso di circa 1,9 [ms] for(pinza=0;pinza<1;pinza++){
PORTCbits.RC2=1;}
} for(i=0;i<TEMP_i;i++){ //pausa tra gli impulsi inviati al "servomotore pinza" di circa 20ms
for(pinza=0;pinza<PAUSA;pinza++){ PORTCbits.RC2=0;
} }
} //STRINGI PINZA void stringi_pinza(){
for(i=0;i<TEMP_i;i++){ //invia al "servomotore pinza" un impulso di circa 1,9 [ms]

5/6/2018 Tesina Maturità 2011 - ROBOT ESPLORATORE (Ferrari Marco & Verona Diego) - slidepdf.com
http://slidepdf.com/reader/full/tesina-maturita-2011-robot-esploratore-ferrari-marco-verona-diego 33/34
33
for(pinza=0;pinza<29;pinza++){ PORTCbits.RC2=1;
} } for(i=0;i<TEMP_i;i++){ //pausa tra gli impulsi inviati al "servomotore pinza" di circa 20ms
for(pinza=0;pinza<PAUSA;pinza++){ PORTCbits.RC2=0;
} } }
//SOLLEVA PINZA void solleva_pinza(){
for(i=0;i<TEMP_i;i++){ //invia al "servomotore carrucola" un impulso di circa 1,9 [ms] for(pinza=0;pinza<25;pinza++){
PORTCbits.RC3=1;}
} for(i=0;i<TEMP_i;i++){ //pausa tra gli impulsi inviati al "servomotore carrucola" di circa 20ms
for(pinza=0;pinza<PAUSA;pinza++){ PORTCbits.RC3=0;
} }
}
//ABBASSA PINZA void abbassa_pinza(){
for(i=0;i<TEMP_i;i++){ //invia al "servomotore carrucola" un impulso di circa 1,9 [ms] for(pinza=0;pinza<40;pinza++){
PORTCbits.RC3=1;}
} for(i=0;i<TEMP_i;i++){ //pausa tra gli impulsi inviati al "servomotore carrucola" di circa 20ms
for(pinza=0;pinza<200;pinza++){ PORTCbits.RC3=0;
} }
}
//RUOTA PINZA (ORARIO) void ruota_pinza_o(){ for(i=0;i<TEMP_i;i++){ //invia al "servomotore base" un impulso di circa 1,9 [ms]
for(pinza=0;pinza<29;pinza++){ PORTBbits.RB4=1;
} } for(i=0;i<TEMP_i;i++){ //pausa tra gli impulsi inviati al "servomotore base" di circa 20ms
for(pinza=0;pinza<PAUSA;pinza++){ PORTBbits.RB4=0;
} }
}
//RUOTA PINZA (ANTIORARIO) void ruota_pinza_a(){
for(i=0;i<TEMP_i;i++){ //invia al "servomotore base" un impulso di circa 1,9 [ms] for(pinza=0;pinza<1;pinza++){ PORTBbits.RB4=1; }
} for(i=0;i<TEMP_i;i++){ //pausa tra gli impulsi inviati al "servomotore base" di circa 20ms
for(pinza=0;pinza<PAUSA;pinza++){ PORTBbits.RB4=0;
} }
}
//MOVIMENTI ROBOT ******************** //AVANTI void avanti(){
PORTBbits.RB0=1; //motore sinistro avanti PORTBbits.RB1=0; //motore sinistro avanti
PORTBbits.RB2=1; //motore destro avanti PORTBbits.RB3=0; //motore destro avanti
}

5/6/2018 Tesina Maturità 2011 - ROBOT ESPLORATORE (Ferrari Marco & Verona Diego) - slidepdf.com
http://slidepdf.com/reader/full/tesina-maturita-2011-robot-esploratore-ferrari-marco-verona-diego 34/34
34
//INDIETRO void indietro(){
PORTBbits.RB0=0; //motore sinistro indietro PORTBbits.RB1=1; //motore sinistro indietro
PORTBbits.RB2=0; //motore destro indietro PORTBbits.RB3=1; //motore destro indietro
}
//SINISTRA void sinistra(){
PORTBbits.RB0=1; //motore sinistro fermo PORTBbits.RB1=1; //motore sinistro fermo
PORTBbits.RB2=1; //motore destro avanti PORTBbits.RB3=0; //motore destro avanti
}
//DESTRA void destra(){
PORTBbits.RB0=1; //motore sinistro avanti PORTBbits.RB1=0; //motore sinistro avanti
PORTBbits.RB2=1; //motore destro fermo PORTBbits.RB3=1; //motore destro fermo }
//FERMO void fermo(){
PORTBbits.RB0=0; //motore sinistro fermo PORTBbits.RB1=0; //motore sinistro fermo
PORTBbits.RB2=0; //motore destro fermo PORTBbits.RB3=0; //motore destro fermo
}