Embed Size (px)
Citation preview
1. Modelagem de Sistema
Sistema pode ser definido como um conjunto de estruturas e recursos que são
interagidos seguindo uma lógica para atingir um ou mais objetivos.
Os estudos destes sistemas podem dar-se sob diferentes formas de abordagem, a
primeira seria interferindo diretamente sob rotinas operacionais promovendo
implementações e ou alterações de procedimentos até que sejam obtidas as condições
ideais, estas ações fazem requerer do tomador de decisão a condução de estudos
preliminares e experiência, para que as alterações não minorem a performance do
sistema. A segunda refere-se a utilização de modelos que representem os sistemas reais.
Os modelos podem apresentar-se como protótipos ou como modelos
matemáticos, os quais podem prestar-se a soluções analíticas, como por exemplo um
modelo de regressão, ou a simulação, permitindo assim, reconstituir a rotina funcional
de um dado sistema real.
A implementação de modelos matemáticos de simulação a serem utilizados em
computadores requerem o uso das linguagens de programação como FORTRAN, C e
PASCAL ou das linguagens de simulação como SLAM, GPSS, GASP, POWERSIM,
ARENA e EXTEND. Ressalta-se que para empregar os modelos de forma adequada
deve-se proceder a verificação e validação.
Modelos de Simulação
Os modelos matemáticos de simulação, ou simplesmente modelos de simulação,
podem ser classificados em: (a) estáticos ou dinâmicos - denominam-se como modelos
estáticos os que visam representar o estado de um sistema em um instante ou que em
suas formulações não se leva em conta a variável tempo, enquanto os modelos
dinâmicos são formulados para representarem as alterações de estado do sistema ao
longo da contagem do tempo de simulação, (b) determinístico ou estocástico - são
modelos determinísticos os que em suas formulações não fazem uso de variáveis
aleatórias, enquanto os estocásticos podem empregar uma ou mais e (c) discretos ou
contínuos - são modelos discretos aqueles em que o avanço da contagem de tempo na
simulação se dá na forma de incrementos cujos valores podem ser definidos em função
da ocorrência dos eventos ou pela determinação de um valor fixo, nesses casos só é
possível determinar os valores das variáveis de estado do sistema nos instantes de
atualização da contagem de tempo, enquanto para os modelos contínuos o avanço da
contagem de tempo na simulação dá-se de forma contínua, o que possibilita determinar
os valores das variáveis de estado a qualquer instante.
Verificação, Validação e Confiabilidade de Modelos
Uma das tarefas mais árduas em simulação está em determinar se o modelo
proposto retrata com fidedignidade o sistema em estudo. Para o alcance desta meta são
recomendados a observância de três preceitos básicos, que são a: verificação, validação
e implementação de confiabilidade. Esses preceitos devem ser observados nas várias
fases do desenvolvimento de um modelo, deste modo, tem-se que:
Verificação
Um conjunto de ações para certificar se a forma conceitual adotada na
formulação do modelo, foi transcrita corretamente ao utilizar-se das linguagens de
programação ou de simulação. Recomenda-se na condução deste procedimento: (a) usar
duas ou mais pessoas, (b) rodar o programa para um conjunto variado de situações
procedendo análises dos dados de saída, (c) rastear o programa verificando a execução
dos procedimentos, (d) observar a animação, e (e) comparar os valores gerados pelo uso
de distribuições aos observados em sistemas reais.
Validação
É uma coletânea de ações utilizadas para analisar se um dado modelo representa
com fidedignidade o sistema em estudo. Podendo este procedimento ser conduzido em
conjunto com a verificação, fato que imprimirá maior confiabilidade ao modelo. A
validação pode ser categorizada em estatística e subjetiva. A estatística consiste no
emprego de ferramentais como: análise de variância, determinação de intervalo de
confiança, testes de hipótese, ajustamento de curvas, análises de regressão e análises de
séries temporais. Enquanto a subjetiva é recomenda quanto não há possibilidade de
proceder incursões exploratórias aprofundadas sobre o sistema em estudo. Para estes
casos, pode ser utilizado, por exemplo, o Teste de Turing. Este teste consiste na
exposição das informações geradas pelo modelo e às obtidas do sistema real em um
mesmo formato. Posteriormente, submetem-se estas a análise de um grupo conhecedor
do sistema. Outra forma deste tipo de validação dá-se por análises de especialistas, os
quais procedem o julgamento do modelo, segundo lógicas associadas ao sistema em
estudo.
Implementação de confiabilidade
Conforme citações em literaturas especializadas, para a obtenção de modelos
validados e confiáveis deve-se ater aos seguintes preceitos:
1) Desenvolver modelos interativos com os potenciais usuários.
Desde modo, deve-se: (a) constatar os termos técnicos usuais, (b) coletar dados
relevantes a serem utilizados no desenvolvimento do modelo, (c) utilizar de teorias
existentes relativas o sistema em estudo, (d) analisar outros modelos desenvolvidos
anteriormente e (e) dotar de experiência e intuição na formulação do modelo.
2) Testar as considerações empíricas utilizadas
Um dos ferramentais mais poderosos para a condução desse passo é a realização de
análises de sensibilidade. Deste modo, certifica-se como os resultados da simulação são
impactados mediante alterações dos valores das variáveis de entrada e parâmetros do
sistema.
3) Determinar o quanto os dados gerados são representativos
Este é um dos procedimentos decisivos na validação, o qual consiste na confrontação
das informações geradas pelo modelo com as obtidas do sistema real. O nível de
precisão irá depender dos propósitos de utilização do modelo.
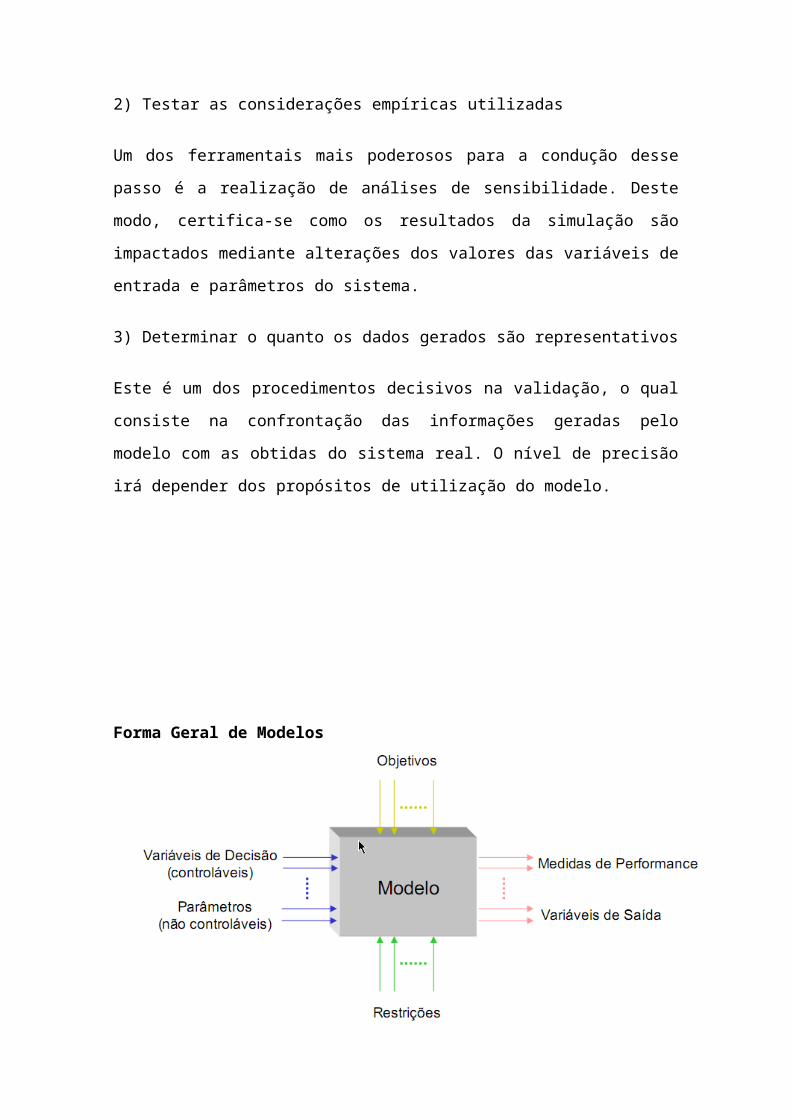
Forma Geral de Modelos
Modelagem e dados
Decisões envolvem avaliação e interpretação de dados
Dados são interpretados em um contexto e vice-versa
Existência de dados potencializa o uso de modelos
Aquisição de dados envolve esfôrço, atenção e custo
Aquisição de dados requer disponibilidade, precisão e relevância
Modelos simbólicos permitem avaliar e interpretar dados de forma
sistemática
Modelos simbólicos podem ser usados para gerar dados
Dados são usados para construir e validar modelos
Formas e fontes de dados
Decisão de como coletar, armazenar, interpretar depende do uso dados
Unidades dos dados
Agregação de dados
Refinamento de dados
Incertezas
Dados podem ser originados de arquivos e memórias do passado
Dados adquiridos pela observação direta ou estimativas no presente
Produzidos por modelos quando fornecidas as entradas
Realizando previsões sobre o futuro
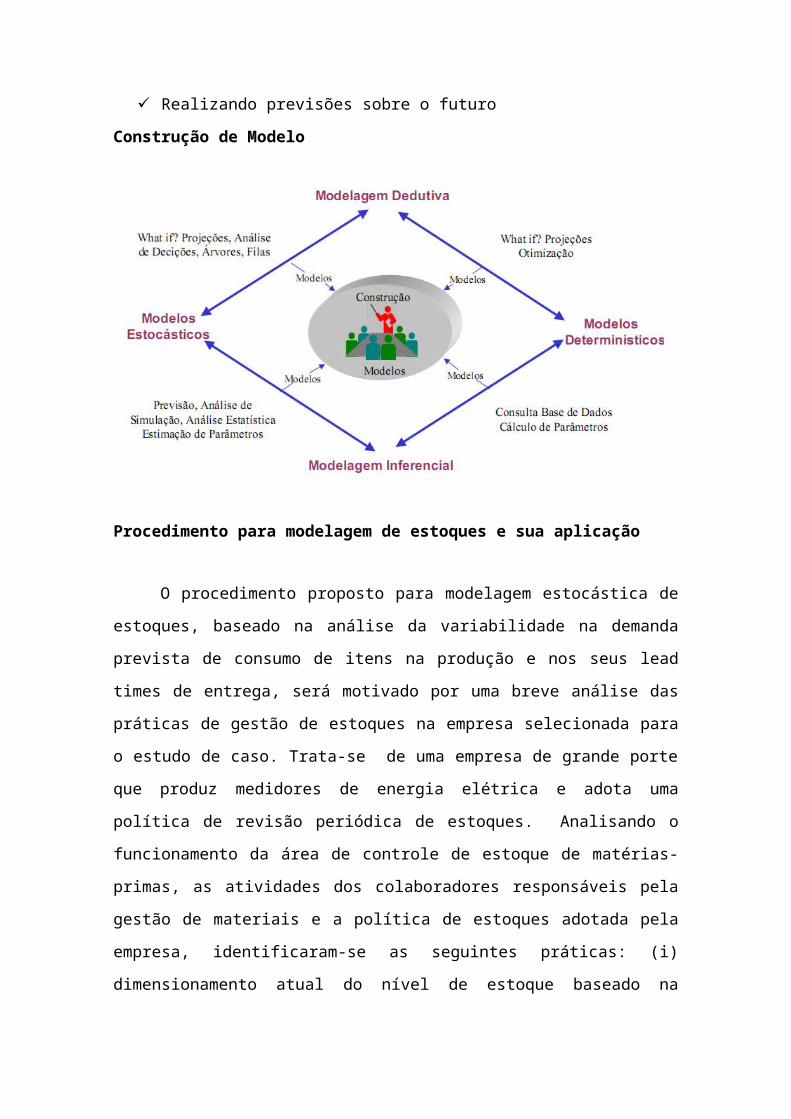
Construção de Modelo
Procedimento para modelagem de estoques e sua aplicação
O procedimento proposto para modelagem estocástica de estoques, baseado na
análise da variabilidade na demanda prevista de consumo de itens na produção e nos
seus lead times de entrega, será motivado por uma breve análise das práticas de gestão
de estoques na empresa selecionada para o estudo de caso. Trata-se de uma empresa de
grande porte que produz medidores de energia elétrica e adota uma política de revisão
periódica de estoques. Analisando o funcionamento da área de controle de estoque de
matérias-primas, as atividades dos colaboradores responsáveis pela gestão de materiais
e a política de estoques adotada pela empresa, identificaram-se as seguintes práticas: (i)
dimensionamento atual do nível de estoque baseado na experiência empírica dos
colaboradores; (ii) não havia utilização de informações de previsões de demanda e
variabilidade de lead time no dimensionamento dos estoques e pedidos; e (iii) não havia
um procedimento estruturado de dimensionamento de estoques e pedidos.
Conseqüentemente, a empresa poderia estar adotando políticas sub-ótimas na
gestão do estoque de seus itens, com possibilidades de melhoria e redução de custos. O
procedimento proposto para modelagem estocástica de estoques é composto por 5
etapas operacionais: (i) classificação ABC dos itens em estoque e coleta de dados; (ii)
previsão de demanda (consumo) do item analisado; (iii) ajuste de dados de lead time de
entrega do item analisado a distribuições de probabilidade e estimativa de seus
respectivos parâmetros; (iv) cálculo do nível de estoque do item analisado; e (v) ajuste
operacional dos pedidos do item analisado.
2.Teoria das filas
A teoria das filas é um ramo da probabilidade que estuda a formação de filas,
através de análises matemáticas precisas e propriedades mensuráveis das filas, ela provê
modelos para demonstrar previamente o comportamento de um sistema que ofereça
serviços cuja demanda cresce aleatoriamente, tornando possível dimensioná-lo de forma
a satisfazer os clientes e ser viável economicamente para o provedor do serviço,
evitando desperdícios e gargalos.
Definições
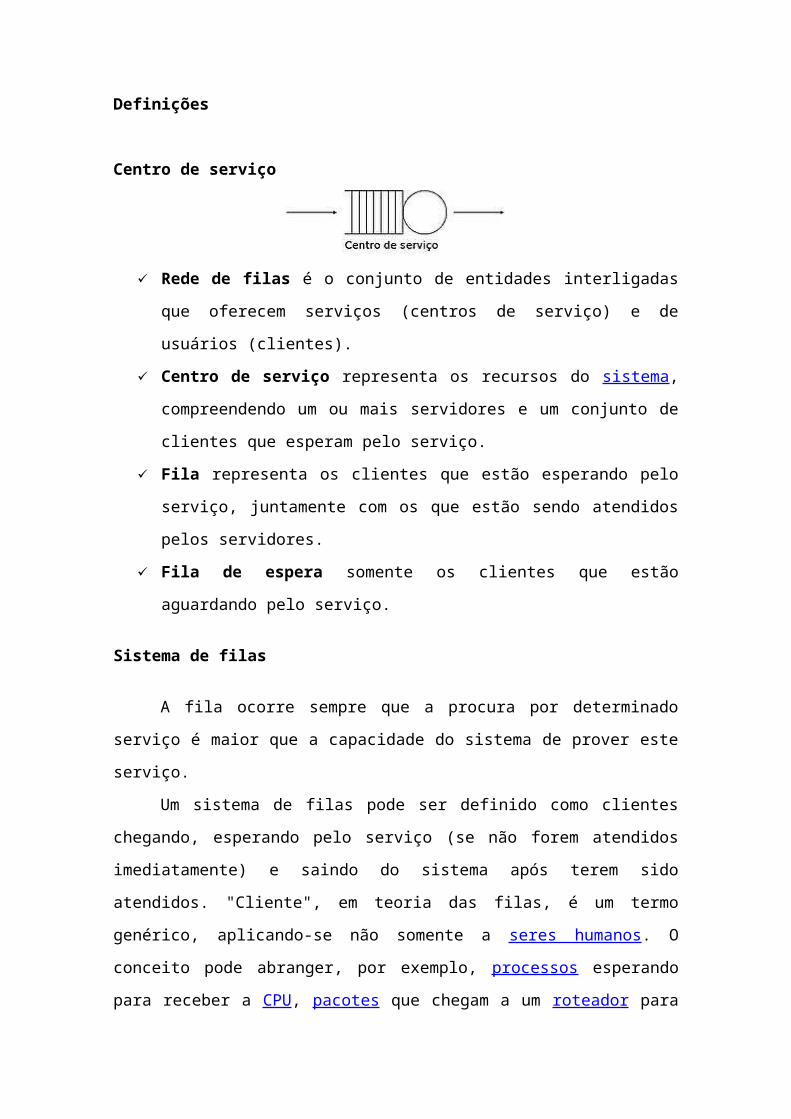
Centro de serviço
Rede de filas é o conjunto de entidades interligadas que oferecem serviços
(centros de serviço) e de usuários (clientes).
Centro de serviço representa os recursos do sistema, compreendendo um ou
mais servidores e um conjunto de clientes que esperam pelo serviço.
Fila representa os clientes que estão esperando pelo serviço, juntamente com os
que estão sendo atendidos pelos servidores.
Fila de espera somente os clientes que estão aguardando pelo serviço.
Sistema de filas
A fila ocorre sempre que a procura por determinado serviço é maior que a
capacidade do sistema de prover este serviço.
Um sistema de filas pode ser definido como clientes chegando, esperando pelo
serviço (se não forem atendidos imediatamente) e saindo do sistema após terem sido
atendidos. "Cliente", em teoria das filas, é um termo genérico, aplicando-se não somente
a seres humanos. O conceito pode abranger, por exemplo, processos esperando para
receber a CPU, pacotes que chegam a um roteador para serem encaminhados, pessoas
esperando no caixa do supermercado, etc.
Aplicações
Existem diversas aplicações da teoria das filas, que podem ser encontradas na
literatura de probabilidade, pesquisa operacional e engenharia industrial. Entre elas
destacam-se:
Fluxo de tráfego (aviões, carros, pessoas, comunicações);
Escalonamento (pacientes em hospitais, programas em computadores);
Prestação de serviços (bancos, correios, lanchonetes).
Componentes de um sistema de filas
Um sistema de filas consiste no processo de chegada, da distribuição do tempo
de serviço, do número de servidores, da capacidade do sistema, da população de
usuários e da disciplina de atendimento.
Processo de chegada
O processo de chegada indica qual o padrão de chegada dos clientes no sistema.
Apresenta comportamento estocástico, ou seja, as chegadas ocorrem no tempo e no
espaço de acordo com as leis da probabilidade; assim, é preciso conhecer qual a
distribuição de probabilidade que descreve os tempos entre as chegadas dos clientes.
A distribuição mais comum é a de Poisson, ou seja, os tempos entre as chegadas
são exponencialmente distribuídos. Entre outras distribuições, estão a de Erlang,
hiperexponencial e arbitrária. Clientes podem chegar simultaneamente (chegada em
batch). Se for possível, é necessário também saber a distribuição de probabilidade do
tamanho do batch. A reação do cliente na fila pode variar. Ele pode esperar
independentemente do tamanho da fila, também pode decidir não entrar no sistema caso
a fila esteja muito grande (cliente decepcionado), ele pode esperar na fila mas depois de
um tempo desistir e sair do sistema, e também pode mudar de uma fila para outra em
sistemas com servidores paralelos.
O padrão de chegada de clientes em função do tempo pode ser permanente;
nesse caso o padrão não muda no tempo, ou seja, a distribuição de probabilidade que
descreve as chegadas é independente do tempo. Também pode ser não-permanente, isto
é, o padrão de chegada muda com o tempo. Por exemplo, a chegada de clientes diminui
no horário de almoço.
Distribuição do tempo de serviço
Assim como no processo de chegada, também é necessário conhecer a
distribuição de probabilidade do tempo de serviço, sendo válidas as mesmas
distribuições apresentadas.
Os serviços podem também ser simples ou batch.O estado pode ser
independente: o processo de atendimento não depende do número de clientes esperando
pelo serviço. Em contrapartida, em um estado dependente, o processo de atendimento
muda de acordo com o número de clientes na fila. Por exemplo, um servidor pode
trabalhar mais rápido quando a fila aumenta ou, ao contrário, ficar confuso e então mais
lento.
Da mesma forma que no processo de chegada, o padrão de serviço pode variar
de acordo com o tempo. Por exemplo, a experiência adquirida com o serviço pode
aumentar a produtividade; o cansaço, por outro lado, pode diminuí-la. Caso não haja
variação o padrão é estacionário.
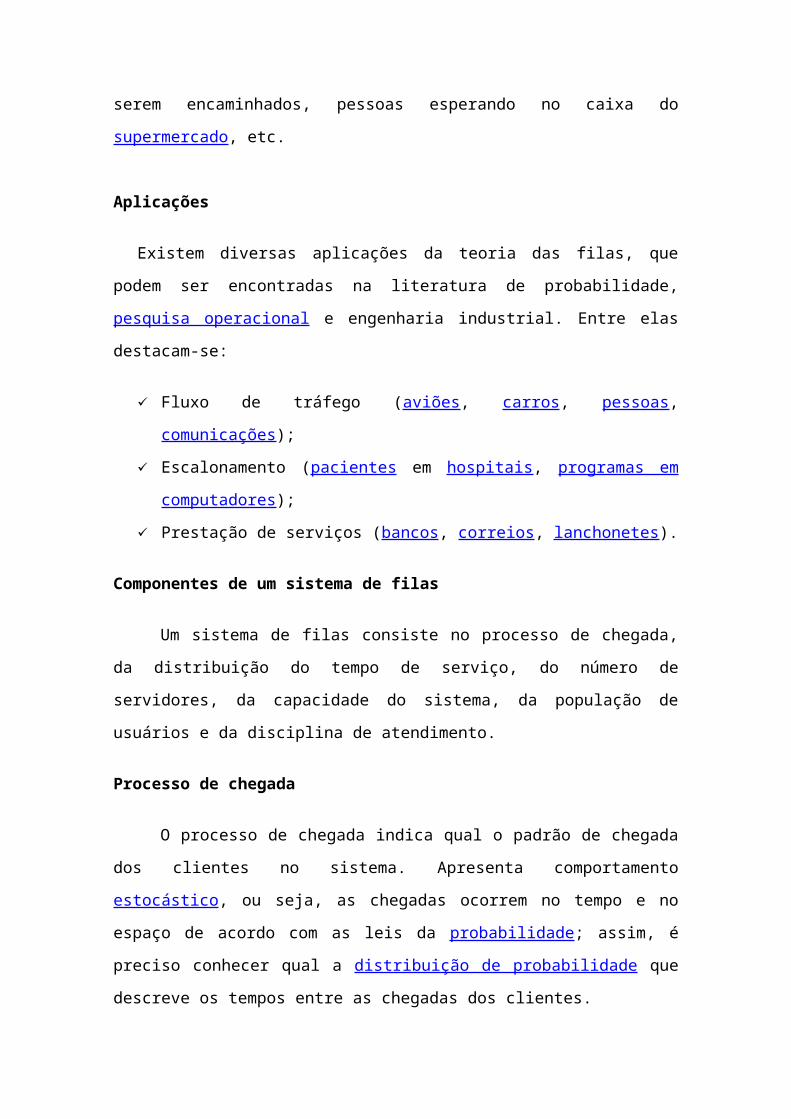
Número de servidores
Um centro de atraso
Esse componente é também conhecido como número de canais de serviço.
Indica a quantidade de "pontos de atendimento" do sistema, de forma a servir aos
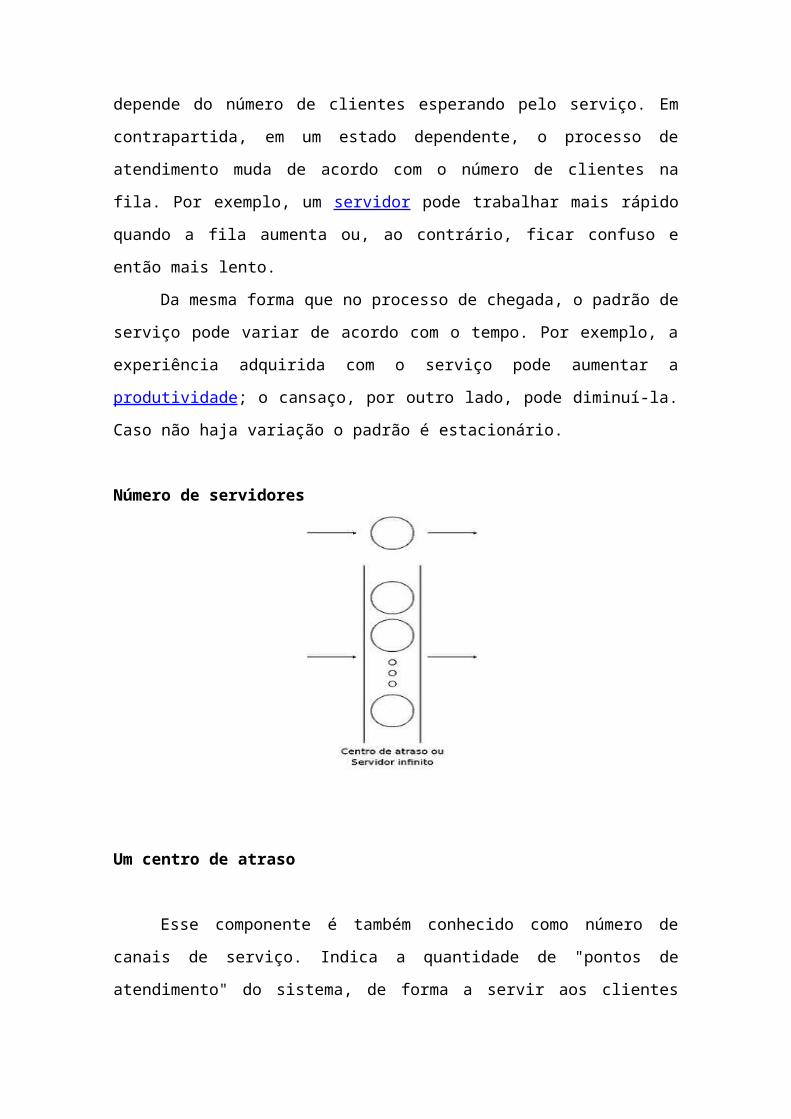
clientes paralelamente. Quando um sistema possui mais de um servidor (multiservidor
ou multicanal), ele pode apresentar duas variações. Em um sistema de fila única, existe
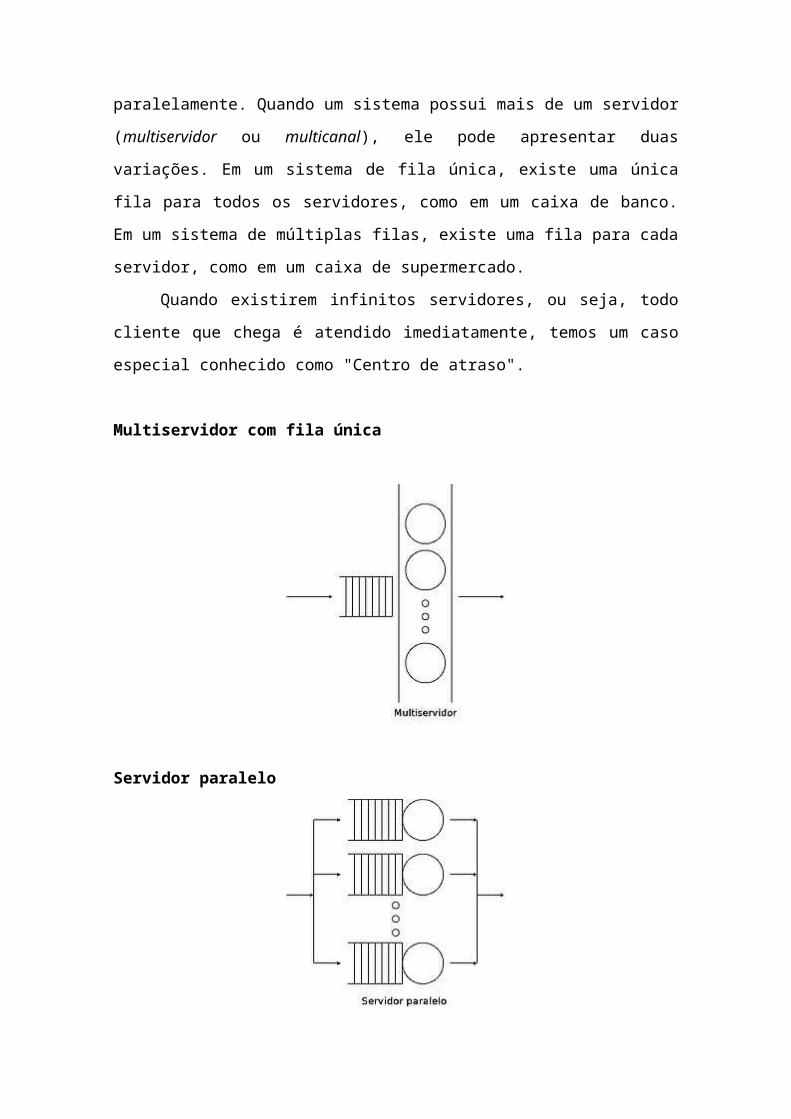
uma única fila para todos os servidores, como em um caixa de banco. Em um sistema de
múltiplas filas, existe uma fila para cada servidor, como em um caixa de supermercado.
Quando existirem infinitos servidores, ou seja, todo cliente que chega é atendido
imediatamente, temos um caso especial conhecido como "Centro de atraso".
Multiservidor com fila única
Servidor paralelo
Capacidade do sistema
Representa o número máximo de clientes que o sistema suporta, incluindo os
que estão em espera e os que estão sendo atendidos. A capacidade pode ser infinita
(mais fácil de analisar) ou finita (por exemplo, número limitado de buffers em um
roteador). Se a capacidade for finita, quando o sistema estiver lotado nenhum cliente
pode entrar até que um cliente saia do sistema, liberando espaço.
População de usuários
Esse componente indica o número potencial de clientes que podem chegar a um
sistema. Pode ser finita ou infinita, descreve a forma como os clientes Disciplina de
atendimento saem da fila de espera para serem atendidos. Algumas disciplinas são:
FCFS (First Come, First Served): Primeiro a Chegar, Primeiro a ser
Atendido. Disciplina mais comum, inclusive na vida diária.
FIFO (First In, First Out): Primeiro a Entrar, Primeiro a Sair).
LCFS (Last Come, First Served): Último a chegar, Primeiro a ser Atendido
LIFO (Last In, First Out): Último a Chegar, Primeiro a Sair. Aplicável em
sistemas em que o item mais recente é mais fácil de ser recuperado, como
por exemplo em sistemas de controle de estoque.
Fila com prioridade: a cada cliente é atribuída uma prioridade; clientes com
maior prioridade têm preferência no atendimento. Pode ser de dois tipos:
Preemptivo : o cliente com maior prioridade é atendido imediatamente,
interrompendo o atendimento ao cliente com menor prioridade. Ao
terminar, o cliente de menor prioridade volta a ser atendido, podendo
continuar o processo de onde parou ou então reiniciá-lo
Não-preemptivo: o cliente com maior prioridade é colocado no início da
fila, recebendo o serviço somente quando o cliente em atendimento sai
do sistema, mesmo se este for de prioridade mais baixa
Round-robin (algoritmo) : cada cliente recebe uma fatia de tempo do servidor
(quantum), dentro da qual é atendido. Após o término do quantum, se a
atividade não foi completada, o cliente é retirado e outro passa a ser atendido.

Posteriormente, o cliente que foi interrompido retorna ao servidor e continua sua
atividade. É muito comum em escalonamento de processos da CPU.
Notação de Kendall
As seis características apresentadas acima descrevem um sistema de filas. Para
simplificar, utiliza-se a notação de Kendall, proposta em 1953, composta por uma série
de símbolos da seguinte forma:
A: Distribuição dos tempos entre as chegadas (Processo de chegada)
S: Distribuição dos tempos de serviço
m: Número de servidores
K: Capacidade do sistema
N: Tamanho da população
Q: Disciplina de atendimento
Exemplos de sistemas de filas
M/G/4/50/2000/LCFS
Processo de chegada exponencial (Markoviano)
Distribuição dos tempos de serviço arbitrária (Geral)
Quatro servidores
Capacidade para cinqüenta clientes
População de dois mil clientes
Disciplina de atendimento "Último a Chegar, Primeiro a ser Servido"
D/M/1/ / /RR
Processo de chegada determinístico
Distribuição dos tempos de serviço exponencial (Markoviano)
Um servidor
Capacidade ilimitada
População infinita
Disciplina de atendimento Round-robin
Muitas vezes, os três últimos símbolos são omitidos. Nestes casos, assume-se
capacidade ilimitada, população infinita e disciplina de atendimento FCFS.
Distribuições de probabilidade
Exponencial (M)
Uniforme (U)
Arbitrária ou Geral (G)
Erlang (Ek)
Hiperexponencial (Hk)
Leis operacionais
São relações simples que não necessitam de nenhuma hipótese sobre as
distribuições dos tempos de serviço ou dos intervalos entre chegadas. Foram
identificadas inicialmente por Buzen em 1976 e posteriormente estendidas por Denning
e Buzen em 1978.
Quantidades operacionais
São quantidades que podem ser medidas diretamente durante um período finito
de observação.
Período de observação: T
Número de chegadas (arrivals): Ai
Número de términos (completions): Ci
Tempo ocupado (busy time): Bi
Taxa de chegada:
Throughput:
Utilização:
Tempo médio de serviço:
Essas quantidades são variáveis que podem mudar de um período de observação
para outro. As relações, porém, continuam válidas.
Lei da Utilização
Ui = XiSi
Lei de Little
Desenvolvida por John Little no início dos anos 60, A Lei de Little relaciona o
número de clientes no sistema com o tempo médio despendido no sistema.
Qi = λiRi
Número médio de clientes = Taxa de chegada x Tempo médio de resposta
Ri = Si + Wi
Tempo médio de resposta = Tempo médio de serviço + Tempo médio de espera
A Lei de Little se aplica sempre que o número de chegadas é igual ao número de
saídas (denominado sistema em equilíbrio). Pode ser aplicada também em subsistemas
(caixa preta). Se o sistema está em equilíbrio, a taxa de chegada é igual ao throughput:
Qi = XiRi
Lei do Fluxo Forçado
Relaciona o throughput global do sistema com o throughput dos dispositivos
individuais. Seja Vi o número médio de visitas ao recurso i por uma tarefa. Cada pedido
que termina precisa passar, em média, Vi vezes pelo recurso i. Se X pedidos forem
concluídos por unidade de tempo, então ViX pedidos terão passado pelo recurso i:
Xi = ViX
Esta lei é aplicável sempre qua a hipótese do sistema em equilíbrio for
verdadeira.
Lei da Demanda de Serviço
Combinando as leis da Utilização e do Fluxo Forçado, obtém-se:
Ui = XiSi = XViSi
ou
Ui = XDi
onde Di = ViSi é a demanda total de serviço no i-ésimo dispositivo.
O dispositivo com a maior demanda de serviço tem a maior utilização, podendo
tornar-se um gargalo no sistema.
Lei Geral do Tempo de Resposta
Sistemas de tempo compartilhado podem ser divididos em dois subsistemas:
subsistema de terminais e subsistema de central de processamento. Dados os
comprimentos individuais Qi das filas de cada terminal, pode-se determinar Q:
Dividindo ambos os lados por X e aplicando a Lei do Fluxo Forçado:
ou
Lei do Tempo de Resposta Interativo
Em um sistema interativo, usuários geram pedidos que são processados por um
subsistema central e os resultados são devolvidos ao terminal. Entre cada pedido de um
usuário, há um tempo ocioso Z.
Aplicando-se a Lei de Little ao subsistema central, tem-se:
Q = XR
Aplicando-a aos M terminais:
Considerando que um cliente ou está sendo atendido ou está ocioso:
3.Método de Monte Carlo
O método de Monte Carlo (MMC) é um método estatístico utilizado em
simulações estocásticas com diversas aplicações em áreas como a física, matemática e
biologia. Tem sido utilizado há bastante tempo como forma de obter aproximações
numéricas de funções complexas, envolve a geração de observações de alguma
distribuição de probabilidades e o uso da amostra obtida para aproximar a função de
interesse.
As aplicações mais comuns são em computação numérica para avaliar integrais.
A ideia do método é escrever a integral que se deseja calcular como um valor esperado.
Existem três classes de algoritmos Monte Carlo:
Erro-Unilateral,
Erro-Bilateral,
Erro-Não-Limitado.
Monte Carlo de Erro-Unilateral
Seja P um problema e A um algoritmo aleatório, A é um algoritmo Monte Carlo
de Erro-Unilateral que resolve P se:
Para toda configuração x que é solução de P,
Para toda configuração x que não é solução de P, prob(A(x = NÃO)) = 1.
Ou seja, sempre que a resposta é NÃO, o algoritmo garante a certeza da
resposta. Contudo, se a resposta for SIM, o algoritmo não garante que a resposta está
correta.
Monte Carlo de Erro-Bilateral
Um algoritmo aleatório A é um algoritmo de Monte Carlo de Erro-Bilateral que
computa o problema F se existe um número real ε, tal que para toda instância x de F:
Monte Carlo de Erro-Não-Limitado
Os algoritmos Monte Carlo de Erro-Não-Limitado são chamados de Algoritmos
Monte Carlo. Um algoritmo aleatório A é um algoritmo de Monte Carlo se para
qualquer entrada x do problema F
Algoritmo de Metropolis
O algoritmo de Metropolis, também conhecido por Algoritmo de Metropolis-
Hastings, é provavelmente o método Monte Carlo mais utilizado na Física, e tem como
objetivo determinar valores esperados de propriedades do sistema simulado, através de
uma média sobre uma amostra.
O algoritmo é concebido de modo a se obter uma amostra que siga a
distribuição de Boltzmann. Para determinar a probabilidade de uma dada configuração,
seria necessário conhecer a chance de ocorrência de todas as outras configurações. No
caso de variáveis contínuas, seria necessário uma integração da densidade de
probabilidade sobre todo o espaço de configurações, mas esse procedimento fica muito
custoso quando se utiliza um número de variáveis da ordem de centenas.
A eficiência do algoritmo de Metropolis está diretamente ligada ao fato de não
levar em conta a probabilidade das configurações em si, mas sim a razão entre elas, pois
a razão entre as probabilidades de duas dadas configurações pode ser determinada
independentemente das outras.
Dadas duas configurações m e n quaisquer, a razão entre a probabilidade da
configuração m, P_m, e a probabilidade da configuração n, P_n, pode ser escrita como:
A partir dessa igualdade, o algoritmo de Metropolis pode ser implementado
através do seguinte conjunto de regras:
(a) Geração de uma configuração inicial aleatória, ou seja, com valores aleatórios para
todos os graus de liberdade do sistema, respeitando as suas restrições. Vamos atribuir o
índice m a essa configuração, que é aceita para a amostra.
(b) Geração de uma nova configuração-tentativa de índice n, resultado de pequenas
alterações nas coordenadas da configuração m.
(c) Se a energia da configuração n for menor que a da configuração m, inclui-se a
configuração n na nossa amostra, e se atribui a ela o índice m a partir desse momento.
Caso contrário, realizam-se os passos descritos nos subitems (c1) e (c2) abaixo:
(c1) Gera-se um número aleatório entre 0 e 1;
(c2) Se esse número aleatório for menor que , aceita-se na amostra a configuração
n, e se atribui a ela o índice m. Caso contrário, o índice m permanece designando a
configuração original.
(d) Repete-se os passos (b) e (c) até que algum critério de parada seja satisfeito. Cada
uma dessas repetições é dita um passo Monte Carlo (MC).
A Simulação de Monte Carlo (MC) é um método crescentemente popular para
valorar derivativos complexos, inclusive OR. O método de MC resolve o problema
através da simulação direta do processo físico, de forma que não seja necessário
escrever a equação diferencial da OR.
É uma ferramenta flexível para manusear vários detalhes específicos de problemas
da vida real, incluindo várias restrições (condições de fronteira e outras) e payoffs
complexos, e várias fontes de incertezas, é um antídoto para a “maldição da
dimensionalidade” (curse of dimensionality) e da “maldição da modelagem” (curse of
modeling) que dificulta a solução de problemas reais complexos.
O método de Monte Carlo (MC) é ilustrado abaixo, sendo que previamente temos
as distribuições de entradas (inputs) e as equações que as ligam ao resultado (output):
O método de Monte Carlo (MC) consiste basicamente dos passos abaixo:
Especifique as distribuições das variáveis de entrada (incluindo seqüências
temporais de distribuições, processos estocásticos) e suas correlações e
dependências;
Amostre as distribuições de dados de entradas (inputs);
Faça operações matemáticas com as amostras dos inputs (+, −, *, ^, /, exp.[.],
etc.) para calcular o resultado (output) gerado por essas amostras;
Repita os passos anteriores N vezes, gerando N outputs;
Calcule a média e outras propriedades probabilísticas da resultante
distribuição de outputs.
Incerteza em Funções Côncavas e Convexas
O efeito da incerteza em funções depende se a função é linear, côncava ou
convexa.Esse efeito pode ser visto com o lema de Itô ou com a desigualdade de Jensen.
De acordo com a Desigualdade de Jensen se x é variável aleatória (v.a.) e f (x) é
uma função (estritamente) convexa de x, então:
E[f(x)] > f(E[x])
Logo, se o valor esperado de x permanece o mesmo, mas sua variância aumenta,
então E[f(x)] aumenta.
Se g(X) é função (estritamente) côncava de x, e x for variável aleatória basta
inverter a desigualdade:
E[g(x)] < g(E[x])
Se h(x) é função linear da variável aleatória x, então:
E[h(x)] = h(E[x])

A simulação de MC permite visualizar esse efeito e verificar que a desigualdade de
Jensen é maior (diferença entre E[f(x)] e f(E[x]) quanto maior for a incerteza, isso nos
permite “ver” que um aumento da volatilidade (e logo da variância) aumenta o valor da
opção.
Efeito da Incerteza no Valor da Opção
Como a opção real F é geralmente uma função convexa do ativo básico V, um
aumento na incerteza (volatilidade), aumenta o valor da opção.
Exemplo: Opção de compra perpétua, a função F(V) é uma função potência convexa
F = A Vβ1, com Α positivo.
A função F(V, t = T) = máx{V(T) − I, 0} é convexa em V. A função máximo de
uma função com variável aleatória geralmente é convexa, explicando o valor da espera.
Efeito da Incerteza e o Lema de Itô
No caso de funções contínuas 2 vezes diferenciáveis (C2):
F(x) é côncava se: ∂2F/∂x2 = Fxx < 0
F(x) é linear se: ∂2F/∂x2 = Fxx = 0
F(x) é convexa se: ∂2F/∂x2 = Fxx > 0
A desigualdade de Jensen é tornada precisa através do lema de Itô (termo derivada
segunda). Exemplo: MGB:
dx = α x dt + σ x dz. Seja α = 0⇒ dx = σ x dz ⇒ E[dx] = 0
Mas para uma função F(x) qualquer, E[dF(x)] ≠ 0. Note que dF é dada pelo lema de
Itô, que resulta em:
dF = [0,5 σ2 x2 ∂2F/∂x2] dt + [σ x ∂F/∂x] dz
Logo, E[dF] > 0 se ∂2F/∂x2 > 0, se F(x) for convexa e E[dF] < 0 se ∂2F/∂x2 < 0,
se F(x) for côncava em x.
O Lema de Itô quantifica o efeito (= [0,5 σ2 x2 ∂2F/∂x2] dt), que é maior quanto
maior for a incerteza (medida por σ).
Simulação de Monte Carlo e Opções
O método de Monte Carlo faz simulação (forward) e não otimização (backward),
mas se tivermos a regra ótima de exercício, o método de MC é mais fácil e mais
flexível. Até pouco tempo atrás só era usado o método de MC em opções do tipo
européia, pois tem regra clara de exercício ótimo em T.
Se tivermos a curva de gatilho antes, podemos valorar a OR do tipo americana, por
exemplo combinando várias incertezas.
Por volta de 1993 começaram a surgir métodos de otimização viáveis para serem
acoplados à simulação de MC, de forma a poder usar opções do tipo americana. Embora
alguns dos métodos para opções americanas ainda sejam mais ou menos complexos,
eles começam a ser usados em opções reais.
Um método que vem se tornando popular é o de Longstaff & Schwartz (mínimos
quadrados), mas existem mais de 10 métodos. Para opções européias (exceto as path
dependent), podemos simular V apenas na expiração. Nas outras, devemos simular todo
o caminho.
Valoração da “Call” Européia por Simulação
Se o ativo básico V é o valor do projeto operando e I é o preço de exercício
(investimento), a equação visual para a opção real tipo Européia é:
Opção Real Européia por Simulação
O problema da call européia é como avaliar de forma integral a simulação. Seja
uma opção européia de compra C que expira em T avaliada no instante t, quando o valor
do ativo básico é Vt. Sendo assim observe abaixo:
EtQ[.] : a expectativa neutra ao risco do payoff condicional a informação em t;
p(VT, T | Vt , t) : a densidade de probabilidade neutra ao risco de VT;
Preço de exercício I e a taxa livre de risco r.
O valor da opção é a avaliação da integral atualizada:
Ou seja, se simula a distribuição neutra ao risco de V (lognormal com a média
“neutra ao risco”), se aplica a regra de decisão em T e atualiza usando a taxa r.
Simulação de Processos Estocásticos
A simulação de processo estocástico permite simular tanto o processo estocástico real,
como o processo estocástico neutro ao risco.
Simulação Real
Aplicações em value-at-risk, simulações para hedge, estimativa de probabilidades de
exercício de opção, tempo esperado para o exercício, etc.
Simulação Neutra ao risco
Valoração de opções e derivativos.
Neste caso é importante lembrar que:
drift neutro ao risco = drift real – prêmio de risco
drift neutro ao risco = α – π= r– δ
Foi visto que para o MGB (Movimento Geométrico Browniano), temos as
seguintes equações para os casos real e neutro ao risco, respectivamente:
dP
P = α dt + σ dz (processo real)
dP
P = (r −δ) dt + σ dz’ (processo neutro ao risco)
Simulação Real x Neutra ao Risco
Típicas amostras de caminho (sample-paths) p/ MGBs real e neutro ao risco (com
os mesmos choques estocásticos) a diferença é π dt.
Enquanto a simulação neutra ao risco é usada para valorar derivativos, a simulação
real é útil para o propósito de planejamento.





























