Embed Size (px)
Citation preview
1
ФЕДЕРАЛЬНОЕ ГОСУДАРСТВЕННОЕ БЮДЖЕТНОЕ ОБРАЗОВАТЕЛЬНОЕ
УЧРЕЖДЕНИЕ ВЫСШЕГО ОБРАЗОВАНИЯ
«ЮЖНО-РОССИЙСКИЙ ГОСУДАРСТВЕННЫЙ
ПОЛИТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ (НПИ) имени М.И. Платова»
На правах рукописи
ФАМ КОНГ ТАО
АВТОНОМНЫЙ ЗАРЯДНО - РАЗРЯДНЫЙ ЭЛЕКТРОТЕХНИЧЕСКИЙ
КОМПЛЕКС С МОНИТОРИНГОМ СОСТОЯНИЯ АККУМУЛЯТОРНЫХ
БАТАРЕЙ
05.09.03 – Электротехнические комплексы и системы
ДИССЕРТАЦИЯ
на соискание ученой степени
кандидата технических наук
Научный руководитель-
доктор технических наук,
доцент Лобов Б.Н.
Новочеркасск – 2019
2
ОГЛАВЛЕНИЕ
ВВЕДЕНИЕ ........................................................................................................................................ 4
ГЛАВА 1. ОБЗОР СУЩЕСТВУЮЩИХ ЗАРЯДНЫХ-РАЗРЯДНЫХ
КОМПЛЕКСОВ И ОПРЕДЕЛЕНИЕ НАПРАВЛЕНИЙ ИХТЕХНИЧЕСКОГО
СОВЕРШЕНСТВОВАНИЯ ........................................................................................................ 11
1.1. Обзор и сравнительный анализ известных технических решений ............................. 11
1.2. Структура автономного зарядно - разрядного электротехнического
комплекса с мониторингом состояния аккумуляторных батарей ............................... 22
1.3. Общие сведения АЗРЭТК ............................................................................................................ 27
1.4. Технические характеристики АЗР ЭТК .......................................................................................... 29
1.5. Место и роль АБ в общей структуре электроэнергетической системы............................... 32
1.6 . Аккумуляторные батареи в СЭС ...................................................................................................... 35
1.7. Характеристики и режимы работы АБ ............................................................................................ 36
1.8. Дизельный двигатель ............................................................................................................................... 43
Выводы по главе 1 ............................................................................................................................................. 47
ГЛАВА 2. РАСЧЕТ, ПРОЕКТИРОВАНИЕ И МОДЕЛИРОВАНИЕ
ВЕНТИЛЬНО-ИНДУКТОРНОГО ГЕНЕРАТОРА ДЛЯ АЗР ЭТК. ................................ 47
2.1. Математическая модель вентильно-индукторного генератора .............................................. 48
2.2. Алгорим расчёта вентильно - индукторного генератора ........................................................... 52
2.3. Характеристики физической модели ВИГ ...................................................................................... 59
2.4. Методы управления для ВИГ ............................................................................................................... 64
2.5. Разработка ВИГ для автономного зарядно - разрядного электротехнического
комплекса .............................................................................................................................................................. 65
2.6. Моделирование системы дизельный двигатель – вентильно - индукторный
генератор (ДД ВИГ) .......................................................................................................................................... 81
2.6.1. Математическая модель ДД ВИГ .............................................................................. 81
2.6.2. Результат моделирования ДД-ВИГ- 1320 ............................................................... 84
2.6.3. Результаты моделирования ДД-ВИГ-1250 .............................................................. 85
Выводы по главе 2 ............................................................................................................................................. 91
ГЛАВА 3. ТЕХНИЧЕСКОЕ СОВЕРШЕНСТВОВАНИЕ АВТОНОМНОГО
ЗАРЯДНО – РАЗРЯДНОГО ЭЛЕКТРОТЕХНИЧЕСКОГО КОМПЛЕКСА
АККУМУЛЯТОРНЫХ БАТАРЕЙ ........................................................................................... 92
3.1. Математическое моделирование аккумуляторной батареи зарядно - разрядного
комплекса. ............................................................................................................................................................. 92
3.2. Техническое совершенствование АЗРЭТК аккумуляторных батарей ................................ 99
3.3. Функциональная схема АЗРЭТК при питании от ДД-ВИГ .................................................. 105
3.4. Описание работы АЗРЭТК в различных режимах ................................................................... 106
3.5. Расчет и выбор элементов и устройств низковольтной части зарядно-разрядного
комплекса ............................................................................................................................................................ 108
3.6. Описание работы основных электронных блоков АЗРЭТК ................................................ 111
3
3.6.1. Блок выпрямителей (БВ) ............................................................................................ 111
3.6.2. Блок понизителя (БП) ................................................................................................. 112
3.6.3. Устройство и работа блока рекуперации (БР) ....................................................... 114
3.7. Моделирование режимов работы АЗРЭТК .................................................................................. 116
3.8. Лабораторные испытания макетного образца АЗР ЭТК ......................................................... 119
Выводы по главе 3 ........................................................................................................................................... 125
ГЛАВА 4. МОДЕЛИРОВАНИЕ РАБОТЫ СОГЛАСУЮЩЕГО DC/DC -
ПРЕОБРАЗОВАТЕЛЯ ............................................................................................................... 126
4.1. Функциональная схема согласующего DC/DC преобразователя ........................................ 126
4.2. Выбор структурной схемы центрального блока ......................................................................... 129
4.3. Выбор структурной схемы силового блока .................................................................................. 130
4.4. Моделирование согласующего DC-DC-преобразователя ..................................................... 132
4.5. Исследование динамических свойств и способов управления DC/DC-
преобразователем на компьютерной модели ....................................................................................... 140
Выводы по главе 4 ........................................................................................................................................... 148
ЗАКЛЮЧЕНИЕ ............................................................................................................................................... 149
СПИСОК СОКРАЩЕНИЙ ...................................................................................................... 152
СПИСОК ЛИТЕРАТУРЫ .......................................................................................................................... 153
ПРИЛОЖЕНИЕ А. Акты внедрения ...................................................................................................... 166
ПРИЛОЖЕНИЕ Б. Параметры ВИГ- 1320 и ВИГ- 1250 ............................................................... 169
ПРИЛОЖЕНИЕ В. Блок центральный и силовой алгоритм работы программы ............... 174
ПРИЛОЖЕНИЕ Г. Алгоритм зарядно- разрядного комплекса ................................................... 176
ПРИЛОЖЕНИЕ Д. Интерфейс программного обеспечения ........................................................ 180
ПРИЛОЖЕНИЕ Е. Плата индикации и управления блоков ......................................................... 193
4
ВВЕДЕНИЕ
Актуальность темы исследования.
В последние два десятилетия в различных областях техники происходили
быстрые и радикальные изменения, связанные с совершенствованием и
применением зарядно-разрядных комплексов аккумуляторных батарей (ЗРК АБ).
В настоящее время такие ЗРК АБ нашли применение для электрического
транспорта, автономных наземных и морских установок с аккумуляторными
батареями, являющимися дополнительными (резервное питание) или
единственными источниками электроэнергии.
Главным недостатком известных ЗРК АБ мощностью от 0,5 до 1,5 МВт
является невозможность автономной работы и необходимость организации
электроснабжения от внешних питающих высоковольтных сетей переменного
тока частотой 50 Гц и напряжением 6 или 10 кВ, которые в настоящее время
отсутствуют на многих предприятиях и объектах, использующих
аккумуляторные батареи.
В известных ЗРК АБ отсутствует возможность автоматизированного
контроля текущего технического состояния каждого элемента аккумуляторной
батареи, как в процессе разряда, так и процессе заряда. Вследствие этого,
автоматические зарядные устройства обеспечивают заряд только по одному
критерию – по достижению напряжения на аккумуляторных батареях
определенного заранее заданного значения, не учитывается техническое
состояние каждого элемента АБ при заряде/разряде, что снижает срок
эксплуатации АБ и повышает расход электроэнергии при заряде.
Оператор комплекса, выполняющий поддержание аккумуляторных
батарей в постоянной готовности к работе по прямому назначению, получает
неполную и несвоевременную информацию для принятия решения о начале или
прекращении заряда аккумуляторных батарей, о необходимости замены или
отключения вышедших из строя АБ.
Применительно к эксплуатации ЗРК АБ в условиях отсутствия
высоковольтных сетей его совершенствование возможно путем включения в
5
состав комплекса дизель-генераторной установки с сохранением возможности
питания от внешней высоковольтной сети (если такая имеется) и мониторинга в
реальном времени технического состояния каждого элемента АБ с увеличением
их ресурса, срока службы, а также автономности потребителей.
Создание и исследование ЗРК АБ большой мощности на базе дизель-
генератора, с предоставлением оператору полномасштабной и достоверной
контрольно-диагностической информации о текущем техническом состоянии
каждого элемента в реальном времени с использованием систем мониторинга
(СМ) является актуальной задачей.
Степень разработанности темы исследования. В настоящее время
существуют различные методики проектирования ЗРК, связанные с именами таких
ученых, как Анисимов А.В., Горобец А.В., Дядик А.Н., Иванов Н.А., Капустин И.
В., Киселев В.И., Красов В.И., Кротенко А.В., Куликов В.К., Куличенко О.В.,
Лебедев А. Н., Ляпидов К.С., Матвиенко И.Н., Никифоров Б.В., Николаенко В.Т.,
Павлюков В.М., Савченко А.В., Федоров А.Е., Цветков А.А., Юдин А.Н. Их вклад
состоит в разработке и создании математических моделей ЗРК АБ и развитие
теории и практики создания и совершенствования ЗРК АБ. Анализ научных работ и
технических характеристик существующих ЗРК АБ. Общими недостатками данных
устройств является относительно небольшая емкость АБ [6], в
электроэнергетической системе отсутствует возможность полноценного
автоматизированного мониторинга текущего технического состояния АБ [107].
Совершенствование высокоэффективного автономного зарядно - разрядного
электротехнического комплекса с мониторингом состояния аккумуляторных
батарей и разработка рациональной технологии их контроля в эксплуатации и при
производстве являются актуальными задачами [14].
Объект исследования. Автономный зарядно-разрядный электротехни-
ческий комплекс с дизель – генераторным источником электроэнергии для
регенеративного заряда аккумуляторной батареи.
Предмет исследования. Математические модели, методы, алгоритмы и
программные средства автономного зарядно-разрядного электротехнического
6
комплекса (АЗРЭТК), компьютерная модель вентильно-индукторного генератора
(ВИГ).
Цель диссертационной работы. Совершенствование зарядно-разрядного
электротехнического комплекса для проведения автоматизированного заряда-
разряда и регенерации аккумуляторной батареи путем обеспечения его
автономности и разработки системы мониторинга фактического состояния
аккумуляторной батареи.
Для достижения поставленной цели решены следующие задачи:
1. Осуществлен анализ состояния проблемы, определены направления
совершенствования автономных зарядных-разрядных электротехнических
комплексов (АЗРЭТК);
2. Разработаны структурная схема комплекса, определены его основные
характеристики и выполнена оценка режимов функционирования АЗРЭТК;
3. Обоснована математическая модель аккумуляторной батареи, выполнен
анализ алгоритмов заряда и заряда-разряда аккумуляторов, установлены конечные
значения напряжений аккумуляторов в процессе разряда, определен момент
окончания заряда, установлены параметры формовочных циклов. Для
мониторинга состояния АБ определен перечень зарядных характеристик АБ и
параметры, от которых они зависят;
4. Предложена математическая модель и алгоритм расчета вентильно-
индукторного генератора (ВИГ) в программных комплексах Elcut и
Matlab/Simulink;
5. Определены характеристи и параметры ВИГ, а также управляющих
импульсов (углы включения вкл и отключения отк, частоты вращения n),
позволяющие зарядить аккумуляторные батареи по заданным ступеням зарядного тока;
6. Разработаны структурные и функциональные схемы АЗРЭТК и основных
его блоков;
7. Разработана математическая модель АЗРЭТК, с помощью которой
проведены теоретические исследования и осуществлено сравнение их
результатов с результатами экспериментальных исследований;
7
8. Разработана автоматизированная система мониторинга состояния
аккумуляторной батареи;
9. Разработаны функциональные схемы согласующего преобразователя и его
основных блоков, определены функции его программы управления, силового
блока и программы обработки сигналов датчиков;
10. Разработана математическая модель согласующего преобразователя,
выполнено исследование его динамических свойств, проведен сравнительный
анализ способов управления.
Научная новизна полученных результатов:
1. Предложена математическая модель и алгоритм расчёта ВИГ,
основанный на расчёте магнитного поля генератора методом конечных элементов,
который в отличие от известных, позволяет выбирать схему питания ВИГ и
алгоритм регулирования выходной мощности, учитывает влияние
коммутационных параметров на основные показатели ВИГ в разных режимах и
более детально оценить степень использования магнитного материала, что
повышает точность расчета ВИГ;
2. Получены рациональные соотношения зубцов статора и ротора 18/12 и
24/16 для ВИГ мощностью 1320 и 1250 кВт, выбраны алгоритмы его управления,
что позволяет уменьшить массу ВИГ, сократить время и затраты на разработку
новых генераторных установок на базе вентильно-индукторных генераторов;
3. Предложен новый численный алгоритм, позволяющий осуществить выбор
эффективных режимов заряда-разряда и регенерации аккумуляторных батарей,
что повышает функциональную устойчивость, срок службы аккумуляторных
батарей и электротехнического комплекса в целом;
4. Разработана компьютерная модель согласующего преобразователя в
различных режимах работы, которая в отличие от существующих включает в себя
блоки управления работой АЗРЭТК, позволяет исследовать динамические
свойства и осуществлять сравнительный анализ способов управления DC/DC-
преобразователем, что сокращает время и затраты на разработку новых
преобразователей.
8
Практическая значимость диссертационной работы:
– предложен и реализован алгоритм программного управления АЗРЭТК, и
разработана система его автоматизации с выбором соответствующих аппаратных
и программных средств, что сокращает время заряда АБ и уменьшает
потребление электроэнергии;
– разработана функциональная схема согласующего преобразователя,
определены функции программы управления силового блока и программы
обработки сигналов датчиков, выбраны параметры настройки ПИ-регулятора и
обратной связи по току, что позволяет обеспечить требуемый характер
переходных процессов изменения выходного напряжения и тока как при
управляющем, так и при возмущающем воздействии;
– разработан опытный образец АЗРЭТК и проведено экспериментальное
исследование режимов его работы: при комплексном непрерывном контроле
параметров аккумуляторов с помощью разработанной многоуровневой системы
мониторинга АБ: токов и напряжений при заряде и разряде, емкости, плотности
электролита в реальном времени.
Предложенные технические решения реализованы в конструктивных
решениях АО ПКБ «ИРИС» (г. Новочеркасск) и Научного Института Энергетики
при ВАНТ.
Материалы работы могут быть использованы при разработке новых АЗРЭТК
с улучшенными эксплуатационными показателями, в частности: с уменьшенным
потреблением энергии в процессе заряда, повышенной надежностью
функционирования.
Методолоия и методы исследования. Системный подход, методы
численного и имитационного моделирования, метод физического моделирования,
исследование операций, регрессионный анализ, случайные процессы,
дисперсионный анализ. Экспериментальные исследования проводились на
опытных образцах ВИГ с использованием методов теории планирования
эксперимента.
Положения, выносимые на защиту:
9
1. Структурная схема автономного зарядно-разрядного электротехнического
комплекса аккумуляторных батарей;
2. Математическая модель и алгоритм проектирования комплекс дизель-
генератор на базе вентильно-индукторной машины;
3. Компьютерная модель ДД-ВИГ и результаты исследования процессов
электромеханического преобразования энергии;
4. Алгоритм программного управления и компьютерная модель АЗРЭТК;
5. Компьютерная модель согласующего DC/DC–преобразователя,
построенная из элементов библиотеки SimPowerSystems Matlab/Simulink [73],
позволяющая исследовать динамические свойства и выполнять сравнительный
анализ способов управления DC/DC-преобразователем;
6. Результаты исследований блока рекуперации (БР), обеспечивающего
экономию электроэнергии;
7. Многоуровневая система мониторинга состояния аккумуляторной батареи;
8. Результаты экспериментальной оценки эффективности разработанного
автономного зарядно-разрядного электротехнического комплекса.
Достоверность научных положений, рекомендаций и выводов.
Подтверждена данными экспериментальных лабораторных и
производственных испытаний опытных образцов АЗРЭТК и практической
реализацией разработанных алгоритмов заряда-разряда в режиме регенерации
аккумуляторной батареи асимметричным током, а также совпадением расчетных и
опытных данных системы контроля и диагностики аккумуляторных батарей.
Апробация работы. На основе внедрения полученных результатов
реализован автономный зарядно-разрядный электротехнический комплекс с
генераторным преобразователем энергии и система заряда – разряда, регенерации
аккумуляторной батареи асимметричным током на предприятиях АО ПКБ
«ИРИС» (г.Новочеркасск) и Научного Института Энергетики при ВАНТ.
Основные результаты диссертационной работы обсуждены и одобрены на:
научно-технической конференции «Энергетика и энергосберегающие
10
технологии» (г. Новочеркасск, ЮРГПУ(НПИ), 2014 г.); XXXVIII сессии семинара
«Кибернетика энергетических систем» (г. Новочеркасск, ЮРГПУ (НПИ), 2016 г.).
Публикации. По теме диссертационной работы опубликовано 12
печатных работ, в том числе 3 работы представлены в научных изданиях,
рекомендуемых ВАК, 1 патент на изобретения РФ, 3 работы в сборниках трудов
различных конференций, 5 работ в сборниках трудов и различных журналах.
Личный вклад автора. Автор непосредственно участвовал на всех этапах
исследований, формулировании цели работы и задачи иследования. Разработал
математические модели вентильно-индукторного генератора (ВИГ), автономного
зарядно-разрядного электротехнического комплекса (АЗРЭТК) и его основных
блоков, провел численные эксперименты и анализ результатов. Участвовал в
изготовлении и лабораторных испытаниях опытных образцов ВИГ и АЗРЭТК.
Соответствие паспорту специальности.
Исследования, выполненные в диссертационной работе, соответствуют
формуле и пунктам 1 и 3 паспорта специальности 05.09.03 «Электротехнические
комплексы и системы»:
Пункт 1. Развитие общей теории электротехнических комплексов и систем,
изучение системных свойств и связей, физическое, математическое,
имитационное и компьютерное моделирование компонентов электротехнических
комплексов и систем;
Пункт 3. Разработка, структурный и параметрический синтез электротех-
нических комплексов и систем, их оптимизация, а также разработка алгоритмов
эффективного управления;
Пункт 4. Исследование работоспособности и качества функционирования
электротехнических комплексов и систем в различных режимах, при
разнообразных внешних воздействиях [113].
Структура и объем работы. Диссертационная работа изложена на 165
страницах, включая 7 таблиц и 110 иллюстраций. Список использованной
литературы включает 125 наименований. Работа состоит из введения, 4 глав,
заключения и 6 приложений.
11
ГЛАВА 1. ОБЗОР СУЩЕСТВУЮЩИХ ЗАРЯДНЫХ-РАЗРЯДНЫХ
КОМПЛЕКСОВ И ОПРЕДЕЛЕНИЕ НАПРАВЛЕНИЙ ИХТЕХНИЧЕСКОГО
СОВЕРШЕНСТВОВАНИЯ
Зарядные-разрядные комплексы (ЗРК) предназначены для заряда-разряда
аккумуляторных батарей (АБ). Здесь рассматривается область применения –
резервные источники питания, автономные потребители электроэнергии, в том
числе, наземный электротранспорт и корабельные электроэнергетические
системы, которые описаны в [78, 90]. В данной главе, автором проведён анализ
структуры, характеристик ЗРК, известных технических решений в данной
области. Дана классификация электротехнологических способов заряда
аккумуляторов и электрической регенерации АБ.
Проведен сравнительный анализ существующих ЗРК, и намечены
направления их модернизации, основными из которых является расширение
функциональных возможностей, обеспечение его автономность и возможности
эксплуатации в условиях СРВ – широкого диапазона значений влажности и
температуры окружающей среды и создание системы мониторинга технического
состояния АБ [115].
С помощью математических моделей проведено исследование дизельного
двигателя (ДД) и аккумуляторной батареи (АБ).
1.1. Обзор и сравнительный анализ известных технических решений
Зарядно-разрядные комплексы предназначены для заряда аккумуляторных
батарей, параллельной работы с аккумуляторными батареями на нагрузку,
формовки отдельных АБ. Общим недостатком известных устройств является,
относительно, небольшая емкость АБ.
Известна система заряда АБ «Автоматизированная сильноточная система
зарядки – разрядки аккумуляторных батарей» мощностью [4], содержащая
управляющий компьютер и функциональные модули, каждый из которых имеет
стабилизированный силовой источник питания и зарядно- коммутационный блок.
12
Эта система относится к электроизмерительной технике и автоматике, а также
может быть использована для организации автоматизированных технологических
процессов, включающих заряд, разряд и разбраковку аккумуляторов разных типов,
собранных в АБ.
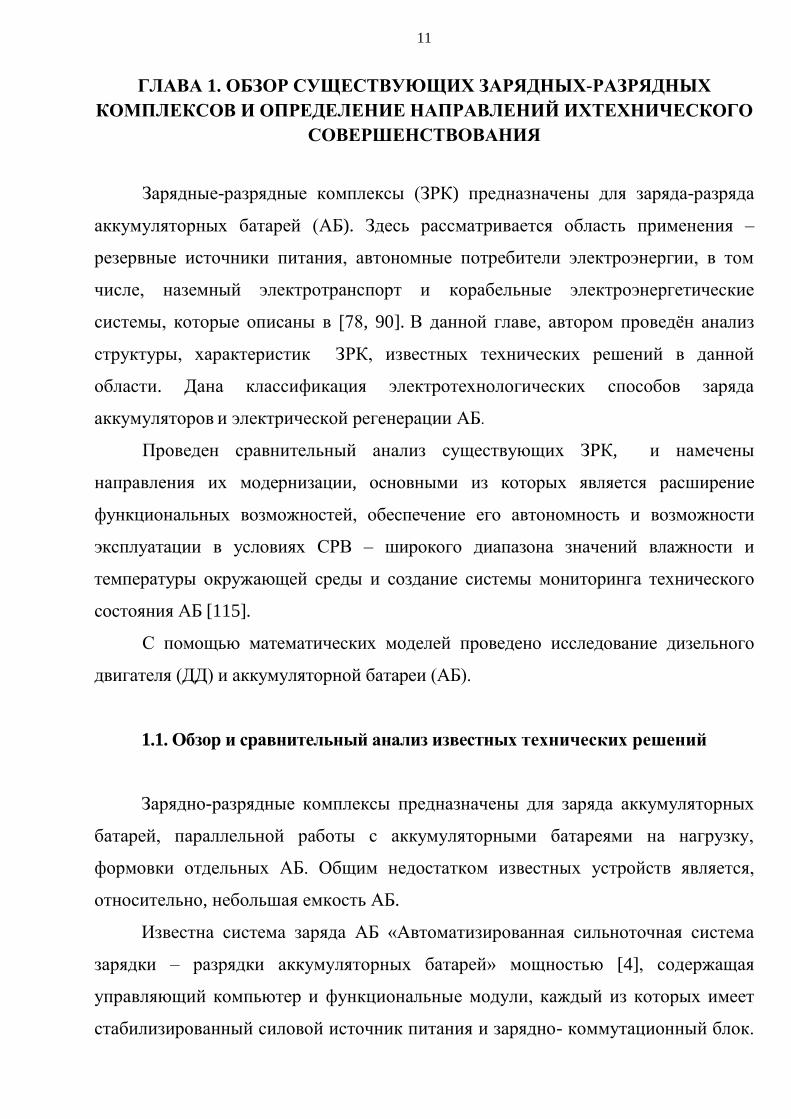
Система [4] (рисунок 1.1), содержит управляющий компьютер и «М»
функциональных модулей, каждый из которых имеет стабилизированный силовой
источник питания и зарядно-коммутационный блок, включающий в себя
коммутаторы силовых цепей подключения к аккумуляторным батареям,
устройство управления коммутаторами и измерения напряжения на клеммах
каждого АБ, температуры, уровня электролита.
К недостатку данного технического решения можно отнести
использование в составе зарядно-коммутационного блока для коммутации тока
зарядки-разрядки каждого аккумулятора, образующих аккумуляторную батарею,
реле (то есть, контактных коммутационных устройств), что при больших токах
значительно усложняет техническое обслуживание и снижает надежность
функционирования системы в целом [115].
Рисунок 1.1 – Структурная схема системы заряда АБ
Одним из серъезных недостатков системы [4] и многих других известных
электроэнергетических силовых установок является невозможность
автоматизированного контроля текущего технического состояния АБ как в
процессе разряда, так и в процессе заряда. Вследствие этого, автоматические
13
зарядные устройства обеспечивают заряд только по одному критерию –
достижение напряжения на АБ определенного заданного значения [6, 107, 111].
Известны зарядно-разрядные устройства – «Агрегат выпрямительный
ВАЗП-260/100-80/50М с микропроцессорной системой управления» [3] и
«Устройства зарядные автоматические серии УЗА» [111]. Они предназначены для
зарядки кислотных АБ, параллельной работы с АБ на нагрузку, формовки
отдельных аккумуляторов. Данные устройства применяются для регулировки
источников постоянного напряжения на атомных станциях, на электростанциях
всех категорий, на предприятиях телеграфно-телефонной связи,
автотранспортном хозяйстве, промышленных и сельскохозяйственных
предприятиях, где в большом количестве используются дорогостоящие кислотные
батареи, требующие постоянной подзарядки.
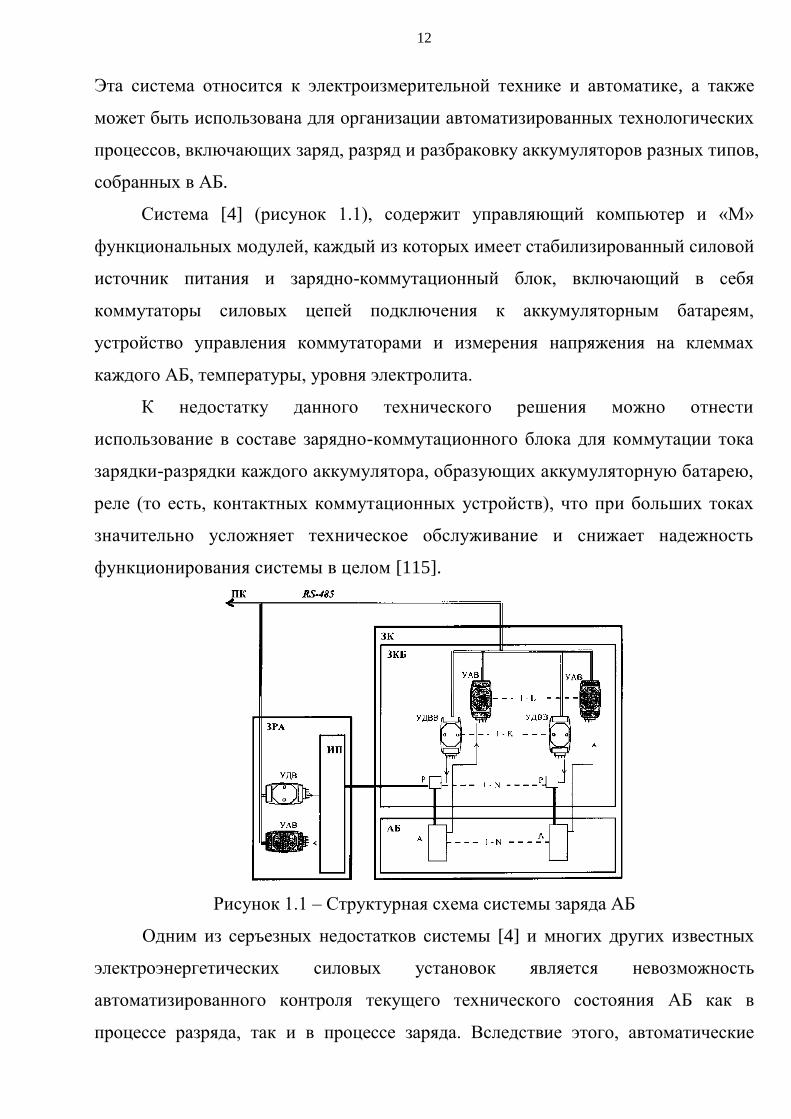
Рисунок 1.2 – Общий вид дизельной электростанции
Электростанция (рисунок 1.2) – «автономная электростанция» [5], содержит
генератор электрической энергии, выпрямительно-зарядное устройство, блок АБ,
контроллер управления и блок автоматической замены масла. Контроллер
управления выполнен с возможностью приема команд управления от удаленного
диспетчерского пункта и передачи ему данных контроля состояния автономной
электростанции.
14
Основным недостатком данной электростанции является невозможность
проведения формовочных циклов заряда-разряда аккумуляторных батарей.
На современных корабельных установках применяется
электроэнергетическая система [107]. Она состоит из 1 и 2 АБ, 1÷10
автоматического выключателя, щита гребного электродвигателя, распределительной
шины основной и резервной сети электроэнергетической системы, гребного
электродвигателя, механически связанного с гребным винтом, двух главных
распределительных щитов питания, береговой сети питания, двух выпрямителей,
двух дизель – генераторов (с генераторами переменного тока), двух щитов дизель
– генераторов, комплекса агрегатированных средств управления
электроэнергетической системой, мощность системы 1,32 МВт.
Недостатками электроэнергетической системы [107] является следующее: в
электроэнергетической системе отсутствует возможность полноценного
автоматизированного мониторинга текущего технического состояния АБ,
включая каждый элемент АБ, из которых набраны батареи. Поэтому оператор
комплекса агрегатированных средств управления электроэнергетической системой
(ЭЭС), обеспечивающий поддержание АБ в постоянной готовности к работе по
прямому назначению, получает неполную и несвоевременную информацию для
принятия решения о начале или прекращении заряда АБ [107].
Известны мобильный зарядно-разрядный комплекс (МЗРК) для
аккумуляторных батарей мощностью 1,25 МВт [1] с электропитанием от дизель-
генератора на базе асинхронном генераторе (АГ) трехфазной сети 380 В, 50 Гц и
трансформатора. К недостатку данного технического решения можно отнести
использование в составе МЗРК асинхронного генератора, который имеет
повышенный уровень вибраций.
Известно зарядно-разрядное устройство с рекуперацией электроэнергии в
корабельную сеть [106], его структурная схема приведена на рисунке 1.3:
15
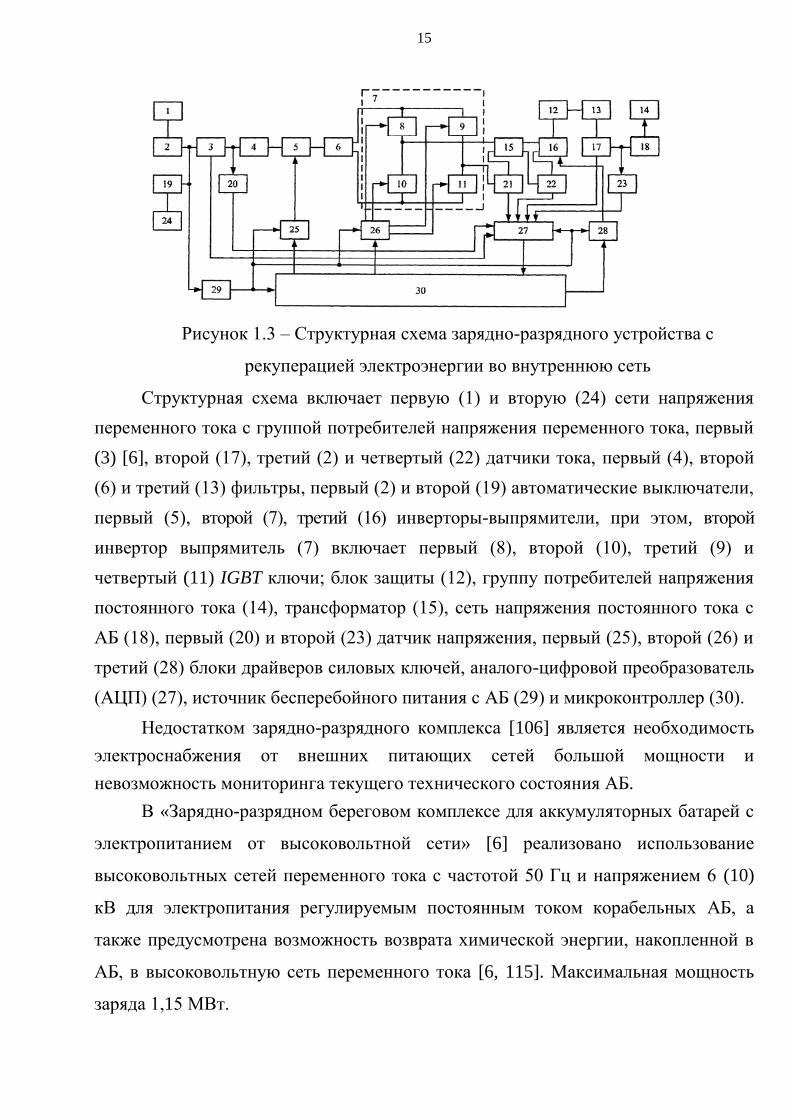
Рисунок 1.3 – Структурная схема зарядно-разрядного устройства с
рекуперацией электроэнергии во внутреннюю сеть
Структурная схема включает первую (1) и вторую (24) сети напряжения
переменного тока с группой потребителей напряжения переменного тока, первый
(3) [6], второй (17), третий (2) и четвертый (22) датчики тока, первый (4), второй
(6) и третий (13) фильтры, первый (2) и второй (19) автоматические выключатели,
первый (5), второй (7), третий (16) инверторы-выпрямители, при этом, второй
инвертор выпрямитель (7) включает первый (8), второй (10), третий (9) и
четвертый (11) IGBT ключи; блок защиты (12), группу потребителей напряжения
постоянного тока (14), трансформатор (15), сеть напряжения постоянного тока с
АБ (18), первый (20) и второй (23) датчик напряжения, первый (25), второй (26) и
третий (28) блоки драйверов силовых ключей, аналого-цифровой преобразователь
(АЦП) (27), источник бесперебойного питания с АБ (29) и микроконтроллер (30).
Недостатком зарядно-разрядного комплекса [106] является необходимость
электроснабжения от внешних питающих сетей большой мощности и
невозможность мониторинга текущего технического состояния АБ.
В «Зарядно-разрядном береговом комплексе для аккумуляторных батарей с
электропитанием от высоковольтной сети» [6] реализовано использование
высоковольтных сетей переменного тока с частотой 50 Гц и напряжением 6 (10)
кВ для электропитания регулируемым постоянным током корабельных АБ, а
также предусмотрена возможность возврата химической энергии, накопленной в
АБ, в высоковольтную сеть переменного тока [6, 115]. Максимальная мощность
заряда 1,15 МВт.
16
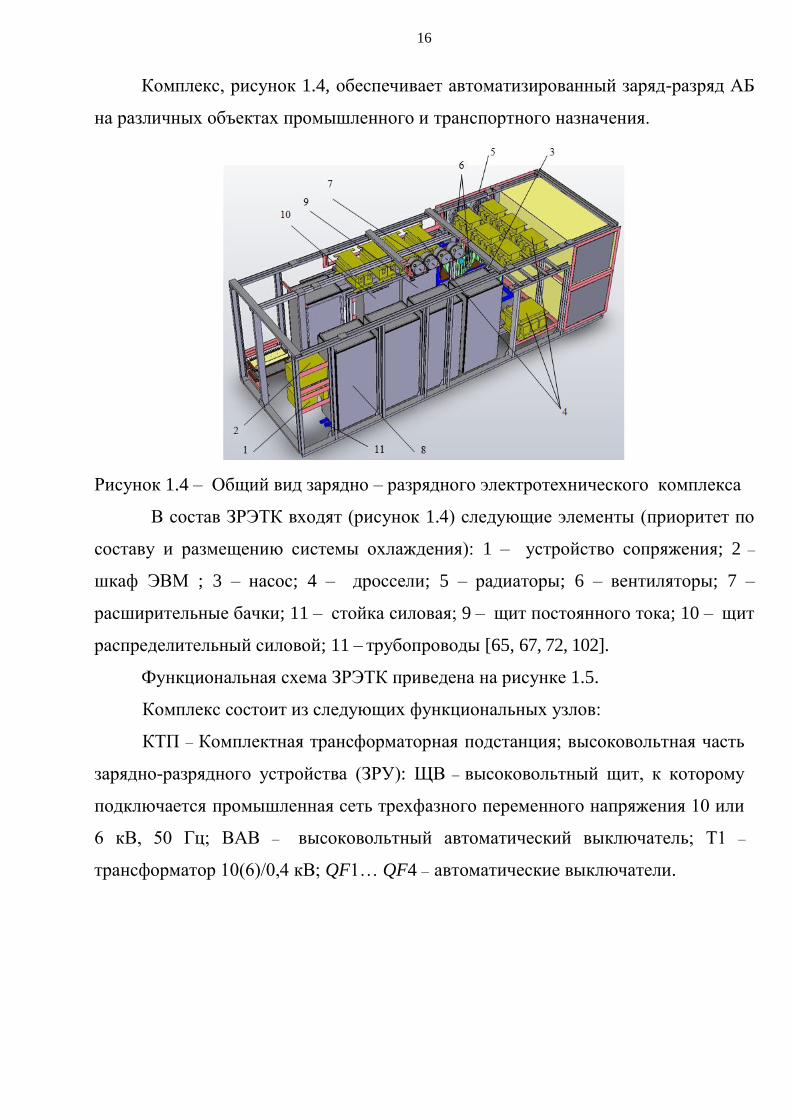
Комплекс, рисунок 1.4, обеспечивает автоматизированный заряд-разряд АБ
на различных объектах промышленного и транспортного назначения.
Рисунок 1.4 – Общий вид зарядно – разрядного электротехнического комплекса
В состав ЗРЭТК входят (рисунок 1.4) следующие элементы (приоритет по
составу и размещению системы охлаждения): 1 – устройство сопряжения; 2 –
шкаф ЭВМ ; 3 – насос; 4 – дроссели; 5 – радиаторы; 6 – вентиляторы; 7 –
расширительные бачки; 11 – стойка силовая; 9 – щит постоянного тока; 10 – щит
распределительный силовой; 11 – трубопроводы [65, 67, 72, 102].
Функциональная схема ЗРЭТК приведена на рисунке 1.5.
Комплекс состоит из следующих функциональных узлов:
КТП – Комплектная трансформаторная подстанция; высоковольтная часть
зарядно-разрядного устройства (ЗРУ): ЩВ – высоковольтный щит, к которому
подключается промышленная сеть трехфазного переменного напряжения 10 или
6 кВ, 50 Гц; ВАВ – высоковольтный автоматический выключатель; Т1 –
трансформатор 10(6)/0,4 кВ; QF1… QF4 – автоматические выключатели.

17
Рисунок 1.5 – Функциональная схема ЗРЭТК
Низковольтная часть зарядно-разрядного устройства (ЗРУ): НУ –
нагрузочное устройство; БС – блок сопряжения; шкаф ЭВМ (на рисунке 3.10 - не
показан); БР – блок рекуператора; БВ1, БВ2 – блоки выпрямителей; БП – блок
понизителя; БА – батарейный автомат, к которому подключается АБ заказа; БЗК
– блок заряда конденсаторов, расположенных в БР, БВ1, БВ2, БП; ЩПСН – щит
питания собственных нужд; КС – коммуникационная сеть; S – автоматический
выключатель; БП120 – блок преобразователя для питания потребителей.
Соединения между силовыми блоками выполнено шинами.
Назначение составных частей ЗРЭТК:
- ЗРУ предназначено для проведения заряда-разряда АБ при питании от
трехфазной сети 10 кВ или 6 кВ, 50 Гц;
- НУ обеспечивает поддержание разрядных токов 1850, 920 и 800, 400 А
при проведении лечебного цикла АБ, при начальном напряжении на АБ – (320-
290) В до достижения конечного напряжения 210 В;
- преобразователь обеспечивает питание потребителей (аппаратура
управления, освещение, электроприводы (максимальная мощность двигателя ~30
кВт) постоянным током в режиме стабилизации напряжения в диапазоне (175-
320) В;

18
- комплект щитов предназначен для подачи питания на заказ и для
технологического обеспечения базирования [65].
Конструктивно ЗРЭТК разделен на 2 части: высоковольтная часть (на
рисунке 1.6,а – слева) и низковольтная часть (зарядно-разрядное устройство - справа).
Рисунок 1.6.а – ЗРЭТК, вид сверху
В правой низковольтной части скомпоновано следующее оборудование
зарядно-разрядного устройства: где 7 – нагрузочное устройство (НУ); 6 –
трехфазные дроссели; 1 – блок выпрямителя БВ1; 2 – блок выпрямителя БВ2; 3 –
блок рекуператора БР; 4 – блок преобразователя БП120; 5 – шкаф ЭВМ; 19 –
вентиляторы системы охлаждения; 10 – расширительные бачки системы
охлаждения; 9 – дроссель постоянного тока; 8 – блок понизителя БП.
На рисунке 1.6,б ЗРЭТК показано расположение следующего оборудования:
16 – конденсатор; 17 – блок сопряжения БС; 18 – блок заряда конденсаторов
БЗК; 20 – дроссель рекуператора
Рисунок 1.6.б – ЗРЭТК, вид слева
19
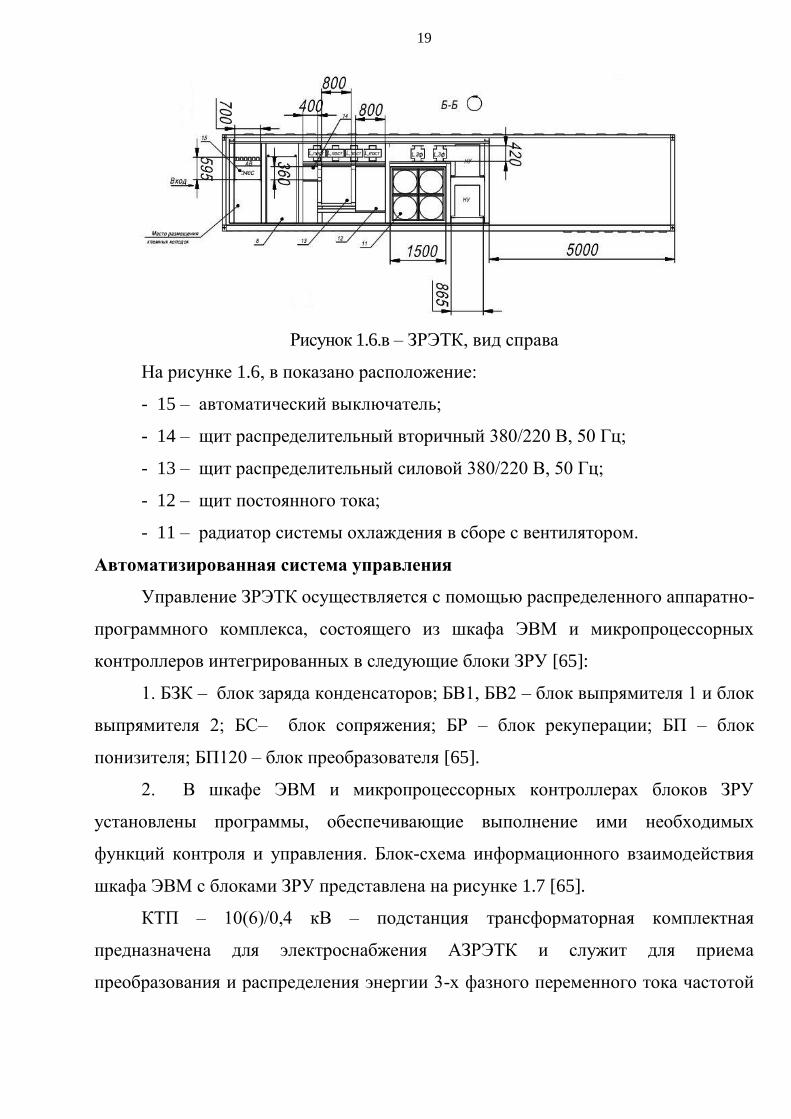
Рисунок 1.6.в – ЗРЭТК, вид справа
На рисунке 1.6, в показано расположение:
- 15 – автоматический выключатель;
- 14 – щит распределительный вторичный 380/220 В, 50 Гц;
- 13 – щит распределительный силовой 380/220 В, 50 Гц;
- 12 – щит постоянного тока;
- 11 – радиатор системы охлаждения в сборе с вентилятором.
Автоматизированная система управления
Управление ЗРЭТК осуществляется с помощью распределенного аппаратно-
программного комплекса, состоящего из шкафа ЭВМ и микропроцессорных
контроллеров интегрированных в следующие блоки ЗРУ [65]:
1. БЗК – блок заряда конденсаторов; БВ1, БВ2 – блок выпрямителя 1 и блок
выпрямителя 2; БС– блок сопряжения; БР – блок рекуперации; БП – блок
понизителя; БП120 – блок преобразователя [65].
2. В шкафе ЭВМ и микропроцессорных контроллерах блоков ЗРУ
установлены программы, обеспечивающие выполнение ими необходимых
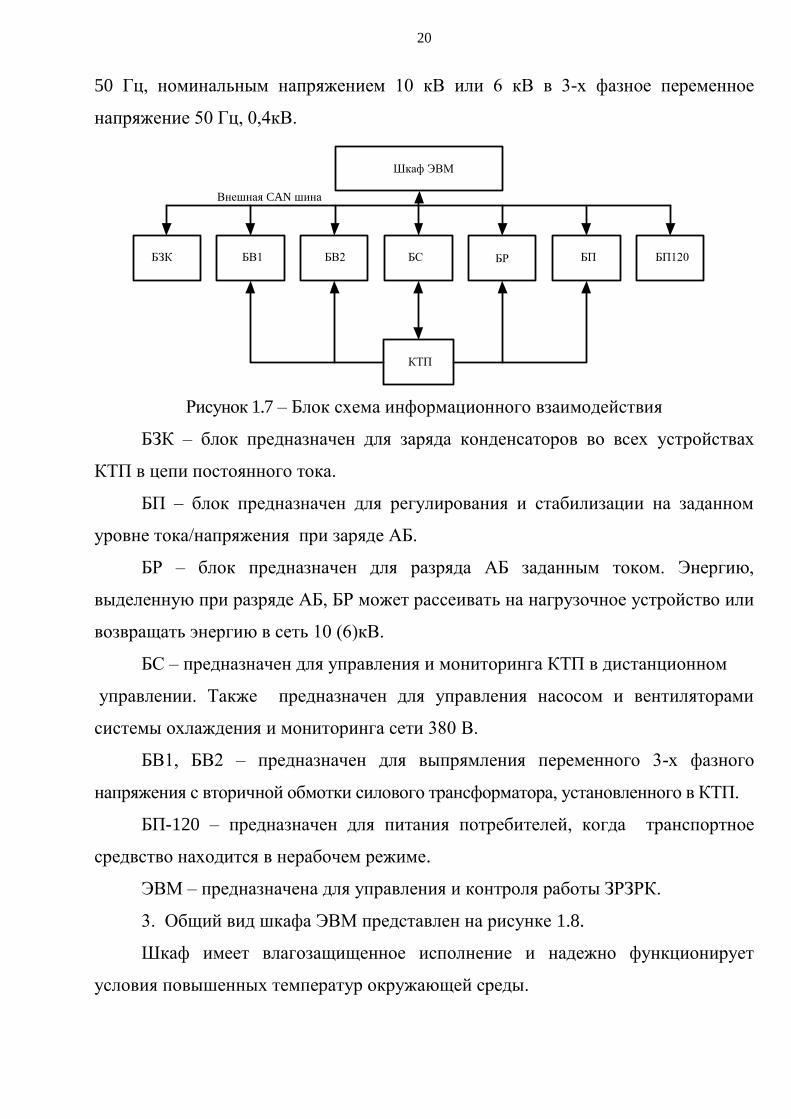
функций контроля и управления. Блок-схема информационного взаимодействия
шкафа ЭВМ с блоками ЗРУ представлена на рисунке 1.7 [65].
КТП – 10(6)/0,4 кВ – подстанция трансформаторная комплектная
предназначена для электроснабжения АЗРЭТК и служит для приема
преобразования и распределения энергии 3-х фазного переменного тока частотой
20
50 Гц, номинальным напряжением 10 кВ или 6 кВ в 3-х фазное переменное
напряжение 50 Гц, 0,4кВ.
Рисунок 1.7 – Блок схема информационного взаимодействия
БЗК – блок предназначен для заряда конденсаторов во всех устройствах
КТП в цепи постоянного тока.
БП – блок предназначен для регулирования и стабилизации на заданном
уровне тока/напряжения при заряде АБ.
БР – блок предназначен для разряда АБ заданным током. Энергию,
выделенную при разряде АБ, БР может рассеивать на нагрузочное устройство или
возвращать энергию в сеть 10 (6)кВ.
БС – предназначен для управления и мониторинга КТП в дистанционном
управлении. Также предназначен для управления насосом и вентиляторами
системы охлаждения и мониторинга сети 380 В.
БВ1, БВ2 – предназначен для выпрямления переменного 3-х фазного
напряжения с вторичной обмотки силового трансформатора, установленного в КТП.
БП-120 – предназначен для питания потребителей, когда транспортное
средвство находится в нерабочем режиме.
ЭВМ – предназначена для управления и контроля работы ЗРЗРК.
3. Общий вид шкафа ЭВМ представлен на рисунке 1.8.
Шкаф имеет влагозащищенное исполнение и надежно функционирует
условия повышенных температур окружающей среды.
КТП
БЗК БВ1 БВ2 БС БР БП БП120
Внешная CAN шина
Шкаф ЭВМ
21
Рисунок 1.8 – Общий вид шкафа ЭВМ
Важнейщим недостатком ЗРК является необходимость электроснабжения от
внешних питающих сетей большой мощности (отсутствующих на многих
предприятиях и автономных объектах) [6, 115].
Кроме этого, к недостаткам можно отнести следующее:
- сложная конструкция высоковольтного трансформатора (наличие первичной
высоковольтной обмотки, с возможностью переключения схем: звезда-
треугольник и двух вторичных низковольтных обмоток);
- использование в составе комплекса высоковольтного оборудования
(переключатель сети 6 или 10 кВ, первый автоматический выключатель,
переключатель треугольник/звезда первичной обмотки высоковольтного
трансформатора и высоковольтного трансформатора) [6], требующего
повышенных запросов к квалификации эксплуатационного персонала (в части
электробезопасности), а также к условиям его эксплуатации, в частности, по
ограничению значений относительной влажности воздуха (например, не более 80%
при температуре не более 40°С), из-за чего его применение при более высоких
значениях указанных величин без доработок ограничено.
В результате анализа известных ЗРК АБ установлено, что при большой
мощности они не являются автономными и питаются от высоковольтных сетей
переменного тока, в них используются генераторы переменного тока, отсутствует
возможность автоматизированного контроля текущего технического состояния
22
каждого элемента аккумуляторной батареи, как в процессе разряда/заряда из-за
чего ограничивается срок эксплуатации АБ [107].
Таким образом необходимо расширить функциональные возможности ЗРК
путем включения в его состав, во-первых, дополнительно дизель-генератора на
основе вентильно-индукторной машины [107]. Это обеспечит его автономность,
возможность эксплуатации в условиях широкого диапазона значений влажности и
температуры окружающей среды и экономию энергии [115], затрачиваемой в
процессе неоднократных циклов заряда-разряда АБ большой емкости [34]. И
второе – это использование современных средств мониторинга текущего
технического состояния каждого элемента АБ.
1.2. Структура автономного зарядно - разрядного электротехнического
комплекса с мониторингом состояния аккумуляторных батарей
Комплекс АЗРЭТК должен обеспечивать [106, 107]:
Сформулированы требования, предъявляемые к АЗРЭТК:
1. Обеспечение автономности потребителя электроэнергии;
2. Мониторинг текущего технического состояния АБ, включая каждый
элемент аккумуляторной батареи и предоставление полномасштабной и
достоверной контрольно-диагностической информации о техническом состоянии
АБ оператору комплекса;
3. Экономия электроэнергии за счет исключения перезаряда и рекуперации
электрической энергии, накопленной в АБ, при выполнении многократных циклов
заряда-разряда;
4. Эффективный тренировочный процесс вплоть до полного разряда АБ;
5. Возможность электропитания как от береговой сети переменного тока, так
и от дизельгенераторной установки.
Укрупненная структурная схема автономного зарядно-разрядного
электротехнического комплекса представлена на рисунке 1.9,а и включает: КТП –
Комплектная трансформаторная подстанция; ДД-ВИГ– дизельный двигатель –

23
вентильно-индукторный генератор; DC/DC – преобразователь; БР – блок
рекуперации энергии; АБ – аккумуляторная батарея; СКД АБ – система контроля
и диагностики аккумуляторных батарей, таких как уровень и температура
электролита, плотность электролита, емкость АБ; CAN-bus: шина
информационного обмена; ЭВМ верхнего уровня [14].
Рисунок 1.9,а – Укрупненная структурная схема предложенного АЗРЭТК
АЗРЭТК может быть непосредственно подключен к высоковольтному
трансформатору, питаемому от промышленной сети трехфазного переменного
напряжения 10 или 6 кВ, 50 Гц или блоку выпрямителя [6]. Автономная работа
обеспечивается при питании комплекса от дизель-генераторной установки [14].
На рисунке 1.9,б представлена детализированная структурная схема
автономного зарядно-разрядного электротехнического комплекса (АЗРЭТК) с
мониторингом состояния АБ [107].
Согласно рисунке 1.9,б схема АЗРЭТК с мониторингом состояния АБ
включает АБ 8, собранную из последовательно соединенных первого 9, второго
10, … и n-го 11 аккумулятора (отрицательная клемма первого аккумулятора 9
подключена к положительной клемме второго 10 и т.д.) АБ 8 подключена через
последовательно соединенные автоматический выключатель 27 и
24
распределительную шину первой сети ЭЭС 30 к входу щита главного
электродвигателя (ГЭД) 39; выход щита ГЭД 39 подключен к главному
электродвигателю 38, к тому же, последний механически связан с
исполнительным механизмом 37. Блок инвертора 13 подключенный
соответственно через первый 2 и второй 3 автоматический выключатель к cети
напряжения переменного тока с группой потребителей напряжения переменного
тока 1 и к нагрузочному устройству 4. Шина сети ЭЭС 30 подключена через
автоматический выключатель 28 к блоку инвертора 13, а через автоматический
выключатель 29 к последовательно соединенным выпрямителю 14, импульсному
трансформатору 5 и к блоку силовым IGВТ-ключам 15, который связан с дизель-
генератором 16 и щитом дизель-генератора 6. Комплекс агрегатированных
средств управления ЭЭС 7 первым входом-выходом подключен к выходу щита
дизель-генератора 6, вторым входом-выходом – ко входу-выходу щита ГЭД 39.
Датчик тока 12, датчик напряжения 26, шкаф ЭВМ автоматизированной
подсистемы мониторинга состояния АБ 35 подключен, соответственно, 36 блок
обработки информации, первый 17, второй 20, … n-й 23 датчик напряжения
подключенный к отрицательной и положительной клемме первого 9, второго
10, … n-го 11 аккумулятора АБ 8. Первый 18, второй 21, … n-й 24 датчик уровня
электролита и первый 19, второй 22, … n-й 25 датчики температуры электролита
помещенный непосредственно в межэлектродное пространство банок первого 9,
второго 10, … n-го 11 аккумулятора АБ 8. Первое 31, второе 32, … n-е 33
устройство контроля параметров первого 9, второго 10, … n-го 11 аккумулятора
установленное непосредственно на верхнюю часть банки первого 9, второго
10, … n-го 11 аккумулятора АБ 8. Шина информационного обмена 34,
объединяющая первое 31, второе 32, … n-е 33 устройство контроля параметров
первого 9, второго 10, … n-го 11 аккумулятора АБ 8 и блок обработки
информации 36. Информационный выход датчика тока 12 подключен к входу
соответственно первого 36, вход датчика напряжения 26 подключен к силовому
выходу пропорционально датчику тока 12. Выход датчика напряжения 26
подключен ко второму входу пропорционально блоку обработки информации 36,
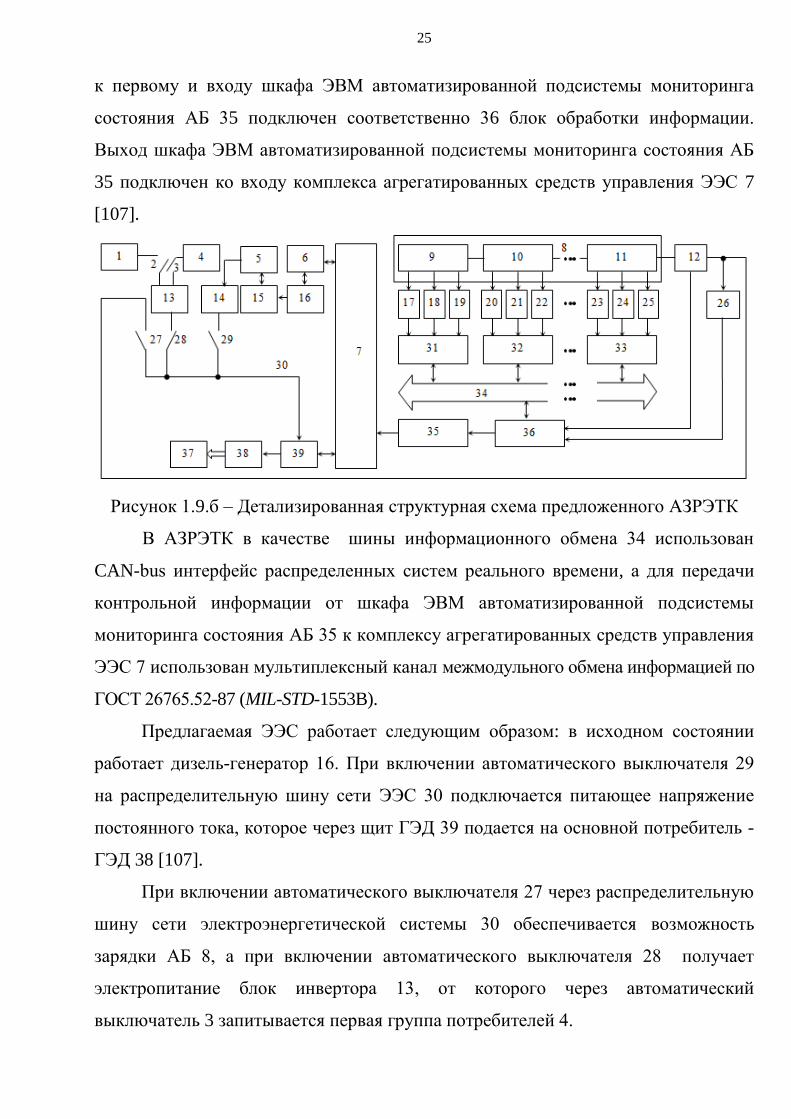
25
к первому и входу шкафа ЭВМ автоматизированной подсистемы мониторинга
состояния АБ 35 подключен соответственно 36 блок обработки информации.
Выход шкафа ЭВМ автоматизированной подсистемы мониторинга состояния АБ
35 подключен ко входу комплекса агрегатированных средств управления ЭЭС 7
[107].
Рисунок 1.9.б – Детализированная структурная схема предложенного АЗРЭТК
В АЗРЭТК в качестве шины информационного обмена 34 использован
CAN-bus интерфейс распределенных систем реального времени, а для передачи
контрольной информации от шкафа ЭВМ автоматизированной подсистемы
мониторинга состояния АБ 35 к комплексу агрегатированных средств управления
ЭЭС 7 использован мультиплексный канал межмодульного обмена информацией по
ГОСТ 26765.52-87 (MIL-STD-1553B).
Предлагаемая ЭЭС работает следующим образом: в исходном состоянии
работает дизель-генератор 16. При включении автоматического выключателя 29
на распределительную шину сети ЭЭС 30 подключается питающее напряжение
постоянного тока, которое через щит ГЭД 39 подается на основной потребитель -
ГЭД 38 [107].
При включении автоматического выключателя 27 через распределительную
шину сети электроэнергетической системы 30 обеспечивается возможность
зарядки АБ 8, а при включении автоматического выключателя 28 получает
электропитание блок инвертора 13, от которого через автоматический
выключатель 3 запитывается первая группа потребителей 4.
26
При необходимости заряда АБ и наличия сети переменного тока,
предусмотрена подача электропитания на потребитель от внешней сети питания 1
через автоматический выключатель 2. От внешней сети питания 1 комплекс
запитывается через автоматический выключатель 3 блок инвертора 13 [107]. При
этом, при включенным 27 и 28 автоматическом выключателе обеспечивается
зарядка АБ 8, а при включенном автоматическом выключателе 3 обеспечивается
электропитание группы потребителей 4.
В режиме автономной работы дизель-генератор 16 выключен и на разряд
работает АБ 8, обеспечивая через распределительную шину сети ЭЭС 30 работу
ГЭД 38, группы потребителей 4.
В режимах заряда и разряда АБ с помощью датчиков напряжения 17, 20, …
и 23, уровня 18, 21, … и 24, и плотности электролита 19, 22, … и 25,
аккумуляторов 9, 10, … и 11, из которых набраны АБ 8, и устройств контроля
параметров аккумуляторов 31, 32, … и 33, осуществляется контроль напряжения
всех аккумуляторов, контроль уровня и температуры электролита во всех банках
аккумуляторов (для экономии затрат на контрольную аппаратуру ЭЭС - только в
каждой i-й банке аккумулятора, например, в каждой 17 банке АБ), контроль
суммарного напряжения и тока АБ.
Устройства контроля параметров аккумуляторов 31, 32, … и 33, блок
обработки информации 34 и шкаф ЭВМ автоматизированной подсистемы
мониторинга состояния АБ 35 выполняют обработку контрольно-
диагностической информации с целью определения, в каком из режимов
находится АБ (разряд или заряд); для расчета зарядной (или разрядной) емкости;
для определения значения сопротивления изоляции АБ, для расчета остаточной
емкости и времени до окончания разряда и т.д. Результаты мониторинга текущего
состояния АБ в виде интегрированной контрольно-диагностической информации
передаются оператору комплекса агрегатированных средств управления ЭЭС 7,
который на базе этой полной и своевременной информации принимает
обоснованные решения о дальнейшем рациональном использовании АБ 8 [107].
27
Периодически или при необходимости выполняются тренировочные циклы
«заряд-разряд» или зарядка для восстановления и поддержания АБ в постоянной
готовности к применению по прямому назначению, притом параметры зарядки
(значение напряжения, тока и времени зарядки) определяются оператором
комплекса агрегатированных средств управления ЭЭС 7 на основе достоверной
информации о текущем техническом состоянии АБ. При зарядке от дизель-
генератора 16 у оператора комплекса агрегатированных средств управления ЭЭС
7 имеется возможность, воздействуя на щит дизель-генератора 6, изменять в
широких пределах напряжение заряда (и соответственно ток заряда) АБ 8.
В режиме автономной эксплуатации для повышения эффективности
эксплуатации АБ, увеличения их ресурса и срока службы, а также повышение
автономности потребителя, оператору комплекса агрегатированных средств
управления ЭЭС предоставляется достаточно достоверная информация по
ключевым параметрам АБ 8 - остаточная емкость АБ и ряд значений времени до
окончания её полного разряда при различных токах разряда [107].
1.3. Общие сведения АЗРЭТК
Работа современных автономных потребителей электроэнергии в большой
степени зависит от правильной и эффективной деятельности электрических
подсистем, которые должны обеспечить не только работу приборов, но и
основных производственных и контролирующих систем. Основным источником
энергии автономного потребителя является АБ [1, 107]. Для увеличения
эффективности и срока эксплуатации такая батарея требует специального
обслуживания.
Автономный зарядно-разрядный электротехнический комплекс (АЗРЭТК)
(общий вид на рисунке 1.4,б), предпоженный в патенте [107], предназначен для:
- Проведения разряда (лечебных циклов), указанных в документации на АБ,
с обеспечением возврата электроэнергии в сеть 380 B; 50 Гц.
28
- Проведения заряда-разряда АБ, в составе свинцово-кислотных АБ,
дискретность изменения тока на выходе в режиме разряда АБ на нагрузочное
устройство 10 А [65];
- Электроснабжения автономных потребителей постоянным током в режиме
стабилизации напряжения в диапазоне 175-320 В [63, 89];
Область применения – автономные промышленные и транспортные установки [78,
79].
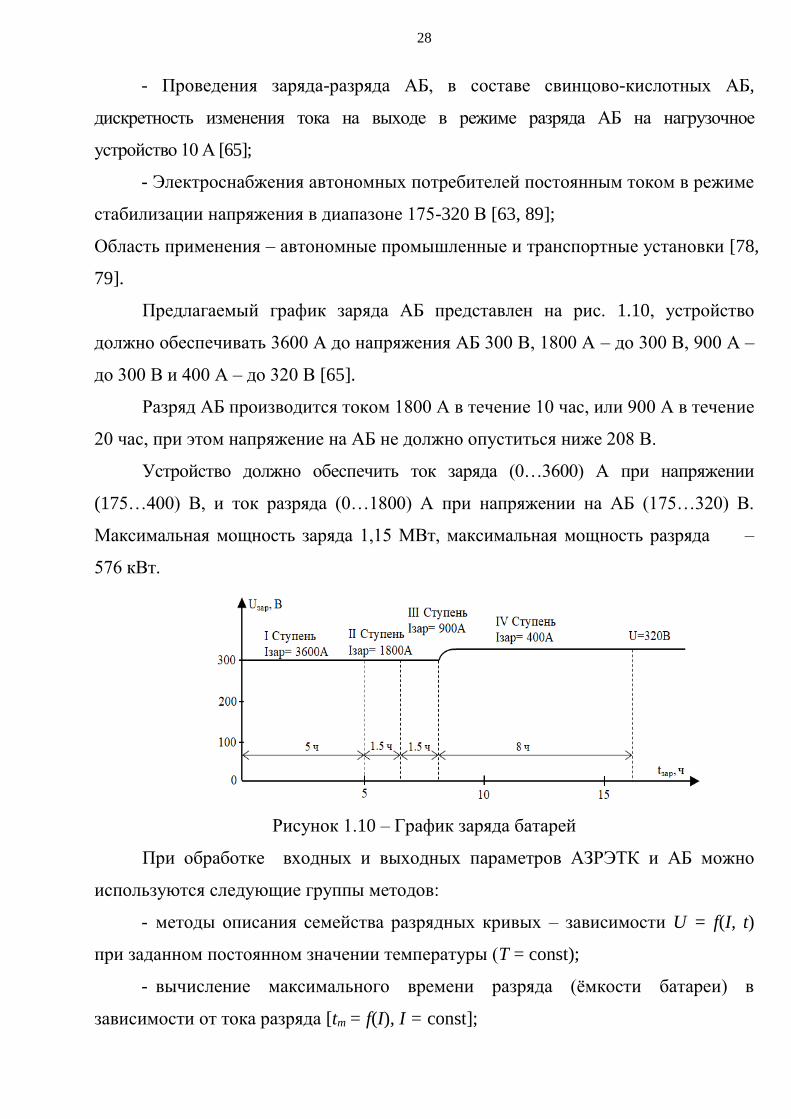
Предлагаемый график заряда АБ представлен на рис. 1.10, устройство
должно обеспечивать 3600 А до напряжения АБ 300 В, 1800 А – до 300 В, 900 А –
до 300 В и 400 А – до 320 В [65].
Разряд АБ производится током 1800 А в течение 10 час, или 900 А в течение
20 час, при этом напряжение на АБ не должно опуститься ниже 208 В.
Устройство должно обеспечить ток заряда (0…3600) А при напряжении
(175…400) В, и ток разряда (0…1800) А при напряжении на АБ (175…320) В.
Максимальная мощность заряда 1,15 МВт, максимальная мощность разряда –
576 кВт.
Рисунок 1.10 – График заряда батарей
При обработке входных и выходных параметров АЗРЭТК и АБ можно
используются следующие группы методов:
- методы описания семейства разрядных кривых – зависимости U = f(I, t)
при заданном постоянном значении температуры (T = const);
- вычисление максимального времени разряда (ёмкости батареи) в
зависимости от тока разряда [tm = f(I), I = const];
29
- методы упрощённого расчёта нестационарного разряда АБ;
- методика определения момента окончания разряда АБ на данном токе, что
находит применение не только при моделировании ЗРК, но и в системе
управления АБ непосредственно в море;
- комплексные методы, определяющие зависимости U = f(I, t, T) и tm = f(I).
1.4. Технические характеристики АЗР ЭТК
АЗРЭТК обеспечивает автономно заряд-разряд АБ, питание автономных
потребителей постоянным током при подключении его к следующим внешним
цепям:
- в качестве источника энергии был выбран дизель - генератор на базе
вентильно-индукторной машины [18];
- сеть постоянного напряжения АБ в диапазоне (175…320) В;
- цепь дистанционного управления по каналу CAN.
В аварийных случаях отклонения параметров сети за пределы, указанные в
таблице 1.1, происходят аварии, ложные срабатывания и иные последствия, если
не происходит отключения комплекса собственными средствами защиты.
В АЗРЭТК обеспечена гальваническая развязка друг от друга следующих
цепей:
- сети постоянного напряжения АБ в диапазоне (175…320) В;
- цепи дистанционного управления.
Основные параметры разрабатываемого АЗРЭТК указаны в таблице 1.1.
АЗРЭТК обеспечивает токи нормального режима заряда группы АБ при
поддержании постоянства тока на 1, 2 и 3 ступенях и постоянства напряжения на
4 ступени:
- 1 ступень (5 часов) – 3600 А;
- 2 ступень (1,5 часа) – 1800 А;
- 3 ступень (1,5 часа) – 900 А;
- 4 ступень (7-9 часов) – от 900 А и ниже (при U= Uconst).
30
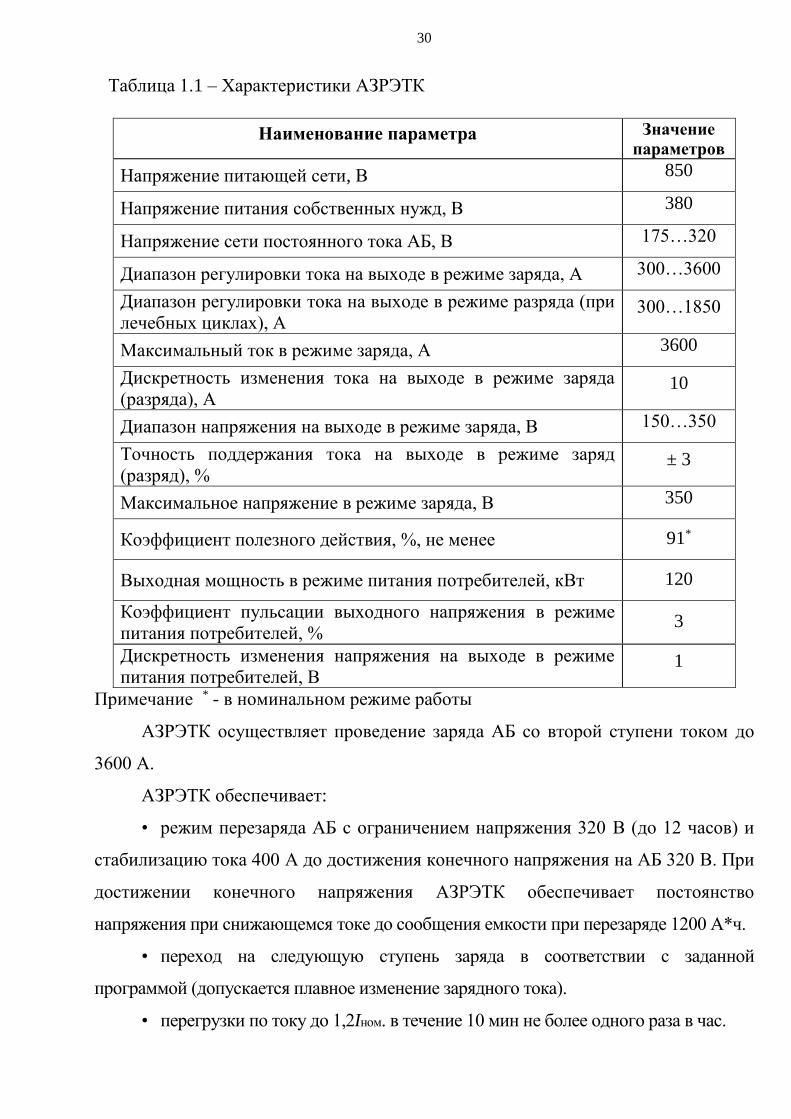
Таблица 1.1 – Характеристики АЗРЭТК
Наименование параметра Значение
параметров
Напряжение питающей сети, В 850
Напряжение питания собственных нужд, В 380
Напряжение сети постоянного тока АБ, В 175…320
Диапазон регулировки тока на выходе в режиме заряда, А 300…3600
Диапазон регулировки тока на выходе в режиме разряда (при
лечебных циклах), А 300…1850
Максимальный ток в режиме заряда, А 3600
Дискретность изменения тока на выходе в режиме заряда
(разряда), А 10
Диапазон напряжения на выходе в режиме заряда, В 150…350
Точность поддержания тока на выходе в режиме заряд
(разряд), % ± 3
Максимальное напряжение в режиме заряда, В 350
Коэффициент полезного действия, %, не менее 91*
Выходная мощность в режиме питания потребителей, кВт 120
Коэффициент пульсации выходного напряжения в режиме
питания потребителей, % 3
Дискретность изменения напряжения на выходе в режиме
питания потребителей, В 1
Примечание * - в номинальном режиме работы
АЗРЭТК осуществляет проведение заряда АБ со второй ступени током до
3600 А.
АЗРЭТК обеспечивает:
• режим перезаряда АБ с ограничением напряжения 320 В (до 12 часов) и
стабилизацию тока 400 А до достижения конечного напряжения на АБ 320 В. При
достижении конечного напряжения АЗРЭТК обеспечивает постоянство
напряжения при снижающемся токе до сообщения емкости при перезаряде 1200 А*ч.
• переход на следующую ступень заряда в соответствии с заданной
программой (допускается плавное изменение зарядного тока).
• перегрузки по току до 1,2Iном. в течение 10 мин не более одного раза в час.
31
После подачи питающей сети из вентильно-индукторного генератора напряжения
850 В на вход АЗРЭТК время готовности ЗРУ к работе не превышает 15 мин.
• токи разряда при выполнении лечебных циклов АБ с возвратом
электроэнергии в сеть 380 В 50 Гц.
• токи разряда 400, 800 и 920, 1850 А при выполнении лечебных циклов в
процессе разряда АБ на нагрузочное устройство (НУ). НУ включается при
начальном напряжении на АБ 320-290 В и до достижения его конечного значения
210 В. Дискретность изменения тока на выходе в режиме разряда АБ на НУ 5 А.
Управление НУ осуществляется с пульта автоматизированной системы
управления (шкаф ЭВМ) [65].
• точность поддержания постоянства тока разряда ±3% от заданной величины
при выполнении лечебных циклов в процессе разряда АБ на НУ. При выполнении
лечебных циклов АБ АЗРЭТК обеспечивает непрерывную работу НУ периодами:
- до 50 часов при токе разряда 400, 800 А;
- до 20 часов при токе разряда 920, 1850 А;
при начальном напряжении на АБ 320-290 В и до достижения его конечного
значения 210 В. При этом может осуществляться питание следующих
потребителей:
- аппаратура управления;
- освещение;
- электроприводы (максимальная мощность двигателя ~30 кВт);
• на выходе преобразователя питания потребителей плавно регулируемое
напряжение постоянного тока в диапазоне (175-320)В с качеством электроэнергии
в соответствии с [25]. Выходная мощность АЗРЭТК в режиме электроснабжения
потребителей не более 120 кВт. Максимальное отклонение выходного
напряжения преобразователя питания потребителей от -13% до +5% при
изменении нагрузки. Пульсации выходного напряжения преобразователя питания
потребителей не более 3%.
• управление комплектом электрических щитов постоянного тока
напряжением (175 – 320) В. В каждом щите управления установлены
32
автоматические выключатели с защитой от короткого замыкания (КЗ) и
перегрузки.
АЗРЭТК имеет местное и дистанционное управление обеспечивающее:
- включение и отключение ЗРУ с выдачей заданных режимом значений
напряжения и тока;
- включение и отключение преобразователя питания потребителей;
- задание режима работы ЗРУ.
Дистанционное управление ЗРУ осуществляется в цифровом коде по каналу
CAN с пульта автоматизированной системы управления (шкаф ЭВМ).
АЗРЭТК обеспечивает в ЭВМ:
- редактирование и хранение до 8 программ заряда, разряда;
- сохранение информации о режиме при обесточивании питающей сети;
- регистрацию емкости (А-часов) заряда и разряда;
АЗРЭТК имеет местную световую сигнализацию:
- о наличии вентильно-индукторного генератора сети напряжением 850В;
- о наличии сети постоянного напряжения АБ;
- о режиме работы ЗРУ;
- об аварийном отключении комплекса;
- о режиме управления (дистанционный, местный);
- об отсутствии сигнала из ЭВМ при дистанционном управлении.
1.5. Место и роль АБ в общей структуре электроэнергетической системы
Аккумуляторная батарея (АБ) является важнейшей составной частью
электроэнергетической системы (ЭЭС) автономных потребителей: дизель-
поездов, электробусов, спасательных глубоководных аппаратов (СГА) и
глубоководного водолазного комплекса (ГВК), и от её надёжного
функционирования зависит большинство технических характеристик.
В автономных режимах источник постоянного тока – аккумуляторная
батарея является основным источником электроэнергии. В соответствии с этим,
основная силовая электрическая сеть выполнена на постоянном токе напряжением

33
24…45 В и большая часть систем и электромеханизмов, устанавливаемых на СГА,
питаются от этой сети [94]. На рисунке 1.11, а паказана схема спасательного
подводного аппарата.
Поэтому очень важно поддерживать аккумуляторную батарею в исправном
состоянии и в режиме постоянной готовности, за счет своевременного заряд
батареи и формовочных циклов заряда-разряда.
Рисунок 1.11 – Схема спасательного подводного аппарата:
1 – маршевый движитель; 2 – спасательный отсек; 3 – шахта входного люка; 4 –
отсек управления; 5 – лаговый движитель; 6 – камера присоса; 7 – контейнер с
аккумуляторной батареей; 8 – иллюминатор; 9 – рабочий манипулятор; 10 –
антенны гидроакустических станций; 11 – аккумуляторная батарея
При питании с берега, во время доковых и межпоходовых ремонтов приём
электроэнергии от внешних источников обеспечивается через разъёмы внешнего
питания основной корабельной сети через щиты берегового питания.
Для своевременного и самое главное мобильного заряда и разряда АБ
необходимо мобильное автоматическое зарядно-разрядное устройство (ЗРК).
Кроме того часто требуется сохранить возможность для питания АБ от наземных
высоковольтных сетей переменного тока.
При создании, подходящего ЗРК, необходимо выполнить целый комплекс
технических требований. А именно: обеспечить режим максимальной экономии
11
34
электроэнергии в сети напряжения переменного тока, за счет рекуперации объеме
всей химической энергии, накопленной в АБ, при выполнении многократных
циклов заряда-разряда АБ [6]; максимально возможным временем работы
потребителей напряжения переменного тока от АБ в случае аварии в сети
напряжения переменного тока; эффективным тренировочным процессом вплоть
до полного разряда АБ; возможностью работы ЗРК от двух сетей электропитания
переменного тока.
Собственная электроэнергетическая система (СЭС) дизель-поезда,
электробуса, СГА или ГВК обеспечивает получение, передачу и распределение
электроэнергии потребителям. В общем, энергетическая система состоит из
следующих основных элементов: источников энергии, электрических сетей,
распределительных устройств и потребителей электроэнергии. Источниками
электрической энергии на судах являются генераторы постоянного или
переменного тока, а также аккумуляторные батареи. Под распределительными
устройствами понимают щиты, предназначенные для распределения
электроэнергии, контроля и управления работой электроустановок. Электрические
сети служат для передачи электроэнергии от источников (или распределительных
устройств) к потребителям. Для передачи энергии используют кабели и
шинопроводы. СЭС обычно имеют также в своём составе различные
преобразователи тока, напряжения, частоты [6].
В СЭС используется постоянный или трёхфазный переменный ток. Если на
объекте по количеству и по суммарной мощности преобладают потребители
переменного тока, то основной род тока, также, должен быть переменным. Вместе
с тем, потребители постоянного тока будут получать питание через выпрямители.
Если же основная установленная мощность и большинство потребителей
работают на постоянном токе, то и основной род тока СЭС должен быть
постоянным, а потребители переменного тока будут питаться через инверторы.
Основными потребителями на дизель-поездах, электробусах и судах
являются электродвигатели. На постоянном токе, в основном, используют
двигатели смешанного возбуждения. Основное преимущество двигателей
35
постоянного тока по сравнению с двигателями переменного тока заключается в
том, что они допускают плавное и в широких пределах регулирование скорости
вращения, которую можно изменять с помощью реостатов, включенных
последовательно с обмоткой возбуждения или изменением напряжения источника питания.
На переменном токе обычно используют асинхронные двигатели (АД) с
короткозамкнутым ротором и реже – двигатели с фазным ротором и синхронные.
Применение переменного тока в СЭС создает следующие возможности:
простое преобразования одного напряжения в другое; отделения с помощью
трансформаторов осветительной сети от силовой, благодаря чему увеличивается
надёжность работы силовой сети.
Применение постоянного тока оказывается целесообразным для
потребителей, где в качестве основного источника электроэнергии служат
аккумуляторы. Применение постоянного тока как основного рода тока СЭС всегда
должно иметь технико-экономическое обоснование.
Основной частью СЭС является электростанция, включающая в себя
источники электроэнергии и главные распределительные щиты, предназначенная
для производства и распределения электрической энергии [46].
Электрическая силовая сеть – часть СЭС, состоящая из вторичных
распределительных и переключающих устройств и кабелей, предназначена для
распределения электроэнергии по объекту. Современные транспортные
электроприводы – это сложные электромеханические устройства,
предназначенные для преобразования электрической энергии в механическую и
автоматизации управления судовыми механизмами, установленными в различных
помещениях транспортного средства.
1.6 . Аккумуляторные батареи в СЭС
На дизель-поездах, электробусах, СГА, ГВК АБ часто является
единственным источником энергии. В основном АБ представляет собой блок,
разделенный перегородками по числу аккумуляторов в батарее.
36
Основными недостатками аккумуляторов являются: большое изменение
напряжения в зависимости от степени разряда; относительно низкий КПД;
довольно высокий вес.
Разновидности АБ по характеру обслуживания:
- традиционные АБ, требующие периодического обслуживания;
- малообслуживаемые АБ;
- необслуживаемые АБ.
В этой классификации под обслуживанием подразумевается, прежде всего,
проверка уровня и плотности электролита. При этом проверяется надёжность
затяжки клеммных соединений, чистота крышки корпуса и его механического крепления.
В настоящее время популярной является технология, где один из электродов
помещён в сепаратор-конверт, названный так по внешнему сходству с обычным
конвертом. Эта конструкция исключает возможное в традиционных АБ замыкание
электродов, а полипропиленовый полупрозрачный корпус позволяет легко
контролировать уровень электролита [46].
Широкое использование свинцово-кислотных АБ требует решения задачи
эффективной зарядки таких батарей. Согласно материалам, представленным на в
свинцово-кислотные батареи по-прежнему находят наиболее широкое применение
в качестве тяговых, никель-металлические способны занять лидирующую
позицию в ближайшем будущем, дальняя перспектива − литий-ионные батареи,
свойства и возможности которых не исследованы в полном объеме. Среди тяговых
аккумуляторов вне конкуренции свинцово-кислотные [21, 116].
В России литий-ионные батареи пока не находит широкого применения,
самая распространенная группа - свинцово-кислотные тяговые АБ.
На данный момент очень много зарядных устройств, содержащих источник
неизменного напряжения с возможностью регулирования зарядного тока [116].
1.7. Характеристики и режимы работы АБ
Свинцово-кислотные АБ имеют наименьшую энергетическую плотность
(30÷50) Вт/кг. Пиковый ток нагрузки может достигать Iраз = 5I20 (где I20 – ток 20-
37
часового разряда). Батареи такого типа сохраняют работоспособность при
температурах окружающей среды Tокр от –20 до +60 °С. Также они обладают
довольно низкой скоростью саморазряда, порядка 5% номинальной емкости в
месяц. Батареи наиболее удобны для использования в энергоемких приложениях,
где их существенные вес и габариты не играют роли. Они считаются самыми
надежными, долговечными и не требующими высоких эксплуатационных затрат
химическими источниками тока. Чаще всего они применяются в больничном
оборудовании, в системах аварийного освещения и источниках бесперебойного
питания, в автомобильной технике. В настоящее время активно эксплуатируются
несколько поколений аккумуляторных батарей. Одно из них - это батареи с жидким
электролитом открытого или закрытого типа, с номинальной емкостью С20 от 35 до
5300 Ач.
При заряде сульфат свинца обеих пластин под действием электрического
тока при электролизе переходит на положительную пластине в перекись свинца, а
на отрицательной – в губчатый свинец. В процессе заряда плотность электролита
повышается из-за образования серной кислоты. Процесс заряда аккумулятора
описывается электрохимической реакцией [10, 11, 46, 99, 101, 105].
Зарядная реакция 2PbSO4 + 2Н2О = РbО2 + Pb + 2H2SO4
и разложение воды Н2О = Н2 + 1/2 О2.
В общем виде можно записать:
3
30
3
30
1)1(
122
42
d QQkVF
Md Q
QkVF
MMd
ddd
OHOHK
SOHAM
где Мк - молекулярный вес кислоты, OHM
2
- молекулярный вес воды, F - число
Фарадея, - плотность электролита в аккумуляторе, V0 - начальный объем
кислоты, k - изменение объема кислоты на Ач, Q3 - зарядная емкость, -доля
тока, идущего на заряд активных масс [117].
По данным И.А.Агуфа 1k и тогда
30
3
30
3 )1(6 7.09 9.2
QV
d Q
QV
d Qd
. (1.1)
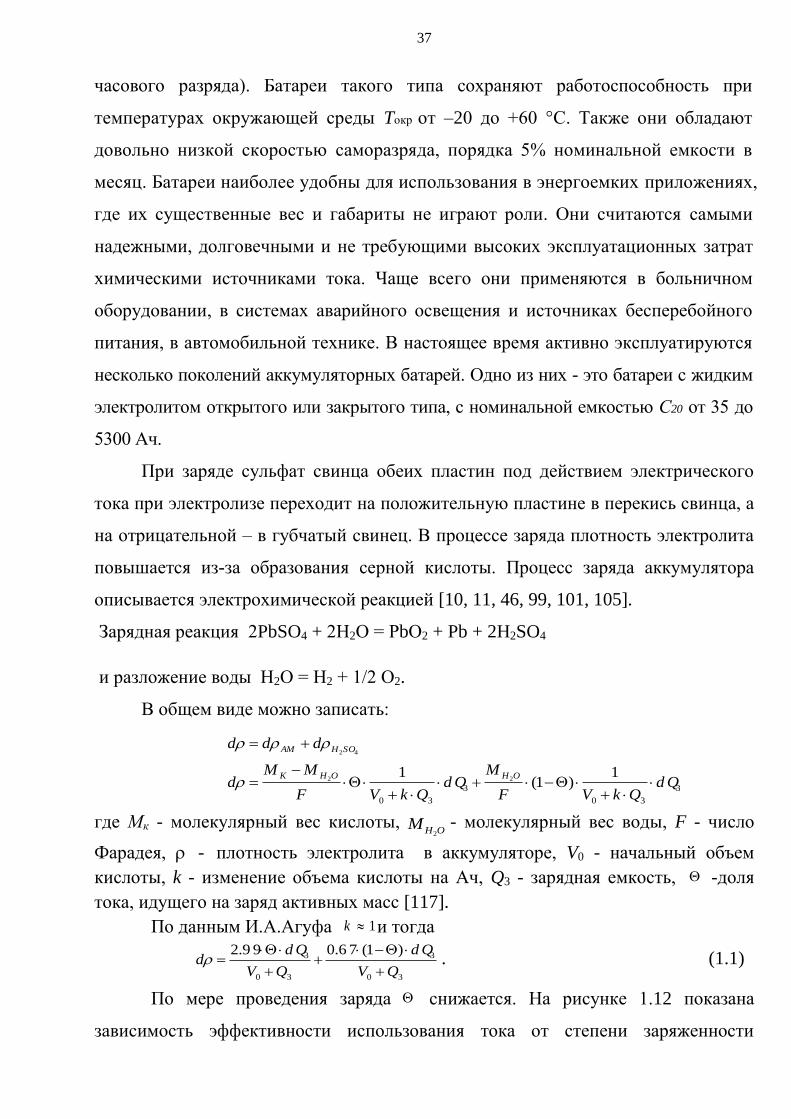
По мере проведения заряда снижается. На рисунке 1.12 показана
зависимость эффективности использования тока от степени заряженности
38
аккумулятора (эксплуатационная документация фирмы YUASA). Из рисунка
следует, что при высокой степени заряженности аккумулятора (>90%)
использование тока на процесс заряда менее 10%. Следовательно, коэффициент
можно считать равным 0 [46, 117].
Рисунок 1.12 – Зависимость эффективности использования тока от степени
заряженности
Тогда уравнение (1.1) можно преобразовать
30
36 7.0
QV
d Qd
и решить
CQV 30ln6 7.0 . (1.2)
Важно определить, на каком этапе зарядными процессами можно
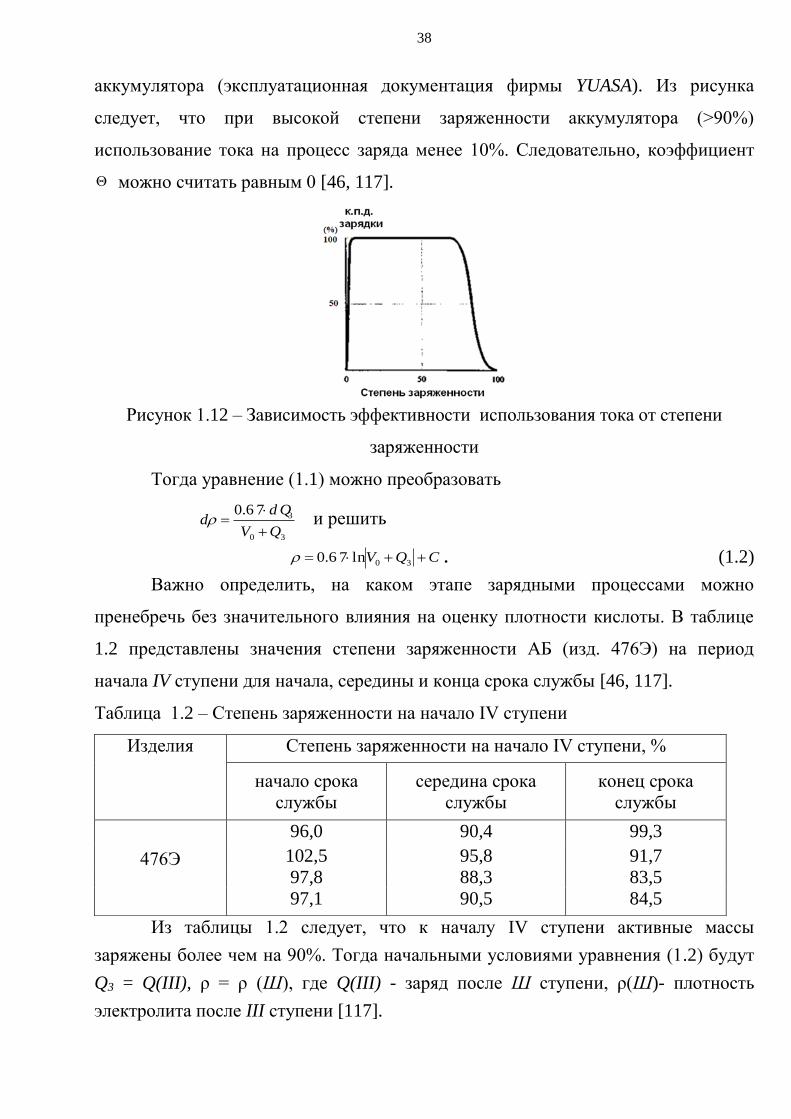
пренебречь без значительного влияния на оценку плотности кислоты. В таблице
1.2 представлены значения степени заряженности АБ (изд. 476Э) на период
начала IV ступени для начала, середины и конца срока службы [46, 117].
Таблица 1.2 – Степень заряженности на начало IV ступени
Изделия Степень заряженности на начало IV ступени, %
начало срока
службы
середина срока
службы
конец срока
службы
476Э
96,0 90,4 99,3
102,5 95,8 91,7
97,8 88,3 83,5
97,1 90,5 84,5
Из таблицы 1.2 следует, что к началу IV ступени активные массы
заряжены более чем на 90%. Тогда начальными условиями уравнения (1.2) будут
Q3 = Q(III), ρ = ρ (Ш), где Q(III) - заряд после Ш ступени, ρ(Ш)- плотность
электролита после III ступени [117].
39
.ln6 7,0)( 30 QVШ (1.3)
Именно, на первых трех ступенях заряда можно считать = 1 и
использовать применяемое сегодня в системе СКД АБ уравнение для оценки
плотности электролита [46]
.ln9 9.2 30 QVНАЧ
После окончания III ступени и перехода на IV ступень, необходимо ввести
в расчет коэффициент к = 2.99/0.67 = 4.5 и считать плотность по уравнению
.ln9 9.2
1)( 30 QV
кШ (1.4)
Аккумуляторные батареи поставляются в заряженном состоянии с
электролитом или в сухом виде.
При отсутствии СКД АБ разряд токами 20 или 50-часового режима
праводить до достижения конечного напряжения 1,85 В на первом контрольном
аккумуляторе. Просчитать ампер-часы (А-ч), снятые с АБ во время разряда, и
определить емкость в % от номинальной по формулам:
С30 = С𝑡
𝐾𝑥100 и
С30
Сформx100% , (1.5)
где Сt – емкость, снятая с АБ во время разряда при средней температуре
элетролита t, А.ч; С30 – емкость АБ, приведенная к температуре 30 0С, А.ч; Сформ –
номинальная емкость данного режима разряда при температуре электролита 30 0С,
заданная в формуляре, А.ч; К – поправочный коэффициент для приведения
фактически полученной емкости к емкости при тепературе 30 0С [48].
Переход с первой ступени заряда на вторую следует производить при
достижении у большинства контрольных аккумуляторов (более 75%) батареи
переходного напряжения 2,42 В в первой половине (до 50%) срока службы
батареи и 2,38 В, во второй половине (до 50%) срока службы батареи.
Затем до 90% срока службы величину переходного напряжения необходимо
снижать на 0,02 В.
Заканчивать ускоренный заряд при достижении плотности электролита
большинства контрольных аккумуляторов не менее 1,280 г/см3. При этом батарее
может быть сообщено не менее 97-103% разрядной емкости.
40
Обеспечение указанных режимов заряда и разряда позволяет существенно
увеличить срок службы аккумуляторных батарей, а также уменьшить потребление
электроэнергии при заряде – исключить перезаряд.
В случае невозможности определения плотности электролита заканчивать
ускоренный заряд по величине зарядной емкости С3, опреденной по зависимости:
C3= k( dH – dp)x103 (1.6)
где dH – номинальная плотность электролита, г/см3; dp – плотность электролита в
конце разряда перед ускоренным зарядом(не приведенная к 30 0С и к
номинальному уровню), г/см3; к = 83, А.ч/(г/см3)
Зарядную емкость первого ускоренного заряда после четырехступечатого
заряда разрешается определить по величине разрядной емкости по счетчику
ампер-часов, умноженной на коэффициент 1,05.
Процесс заряда АБ описывается определенным выбором зарядных
характеристик. Зарядными характеристиками аккумулятора, изменяющиеся во
времени, в процессе заряда являются следующие величины:
– динамическая ЭДС;
– напряжение аккумулятора;
– плотность электролита;
– ЭДС покоя;
– интенсивность газовыделения;
– температура электролита.
Эти характеристики зависят от многих факторов, определяющих
состояние аккумулятора, и величину зарядного тока [46].
При температуре +20°С и постоянной нормальной величине зарядного
тока для исправного АБ, эти характеристики меняются следующим образом:
напряжение аккумулятора – для разряженного аккумулятора в начале заряда
2,18 В. После чего, оно в течение одного-двух часов возрастает до 2,25-2,3 В и
медленно увеличивается (6-8 ч.), затем начинает быстро возрастать и достигает
напряжения 2,4 В. При напряжении U > 2,7 В начинается перезаряд АБ [46].
41
Заряд постоянным током и заряд током при постоянном напряжении,
ступенчатый заряд и разряд аккумулятора [10, 20, 21, 46].
Прорабатывалась возможность применения АБ других типов. Однако
батареи на основе серебряно-цинковых, никель-кадмиевых, серно-натриевых,
литий-ионных, никель-водородных и других АБ, имеющих весьма высокие
энергетические показатели и срок службы. Они не могут быть альтернативой
свинцово-кислотным по таким критериям, как технологичность изготовления,
условия эксплуатации, надежность, стоимость [46, 100].
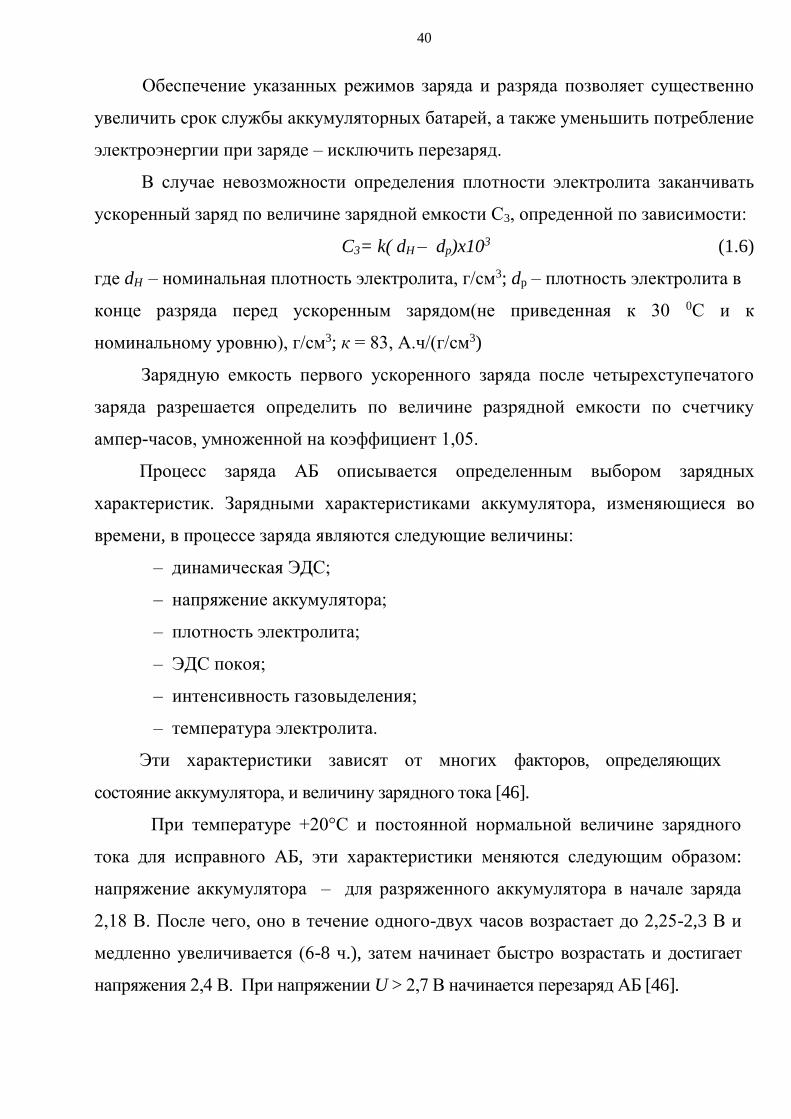
Схема замещения АБ:
К специфическим параметрам математической модели (ММ) относятся
параметры, начального состояния АБ на рисунке 1.13: начальное напряжение U0,
внутреннее сопротивление r, начальная заряженность θ0 и полная емкость Q АБ,
а также начальная температура Т0 [15].
Рисунок 1.13 – Структура математической модели АБ в режиме разряда
Для определения соотношений, описывающих изменение основных
характеристик и параметров АБ, то есть для построения его математической
модели используют схему замещения АБ. Электрические схемы замещения
описываются при помощи фундаментальных законов теории электрических цепей
(закон Ома, первый и второй законы Кирхгоффа и др). Анализ литературных
источников [15] для разработки ММ, позволил выбрать схему замещения
аккумулятора, описывающую разрядную характеристику АБ на рисунке 1.14:
42
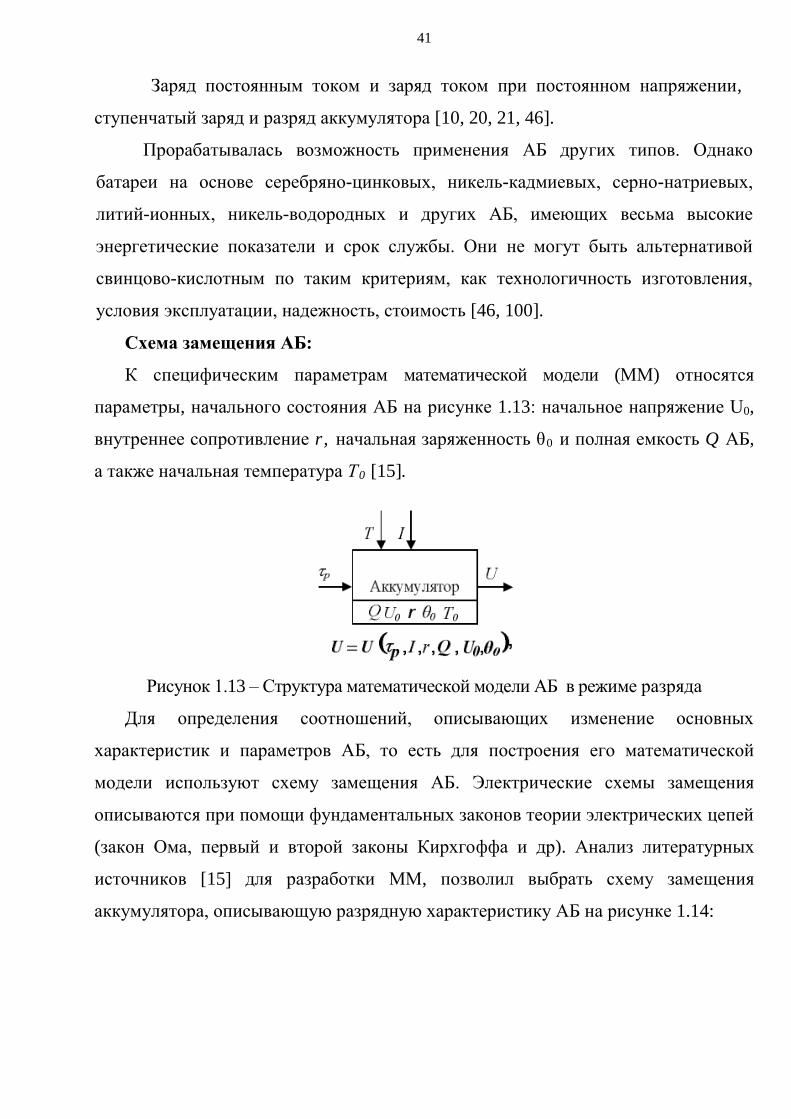
Рисунок 1.14 – Схема замещения АБ
Здесь: Е – идеальный источник постоянной ЭДС; R – сопротивление
электролита в межэлектродном пространстве; r,С1 – элементы релаксационного
блока; С2 – основной конденсатор.
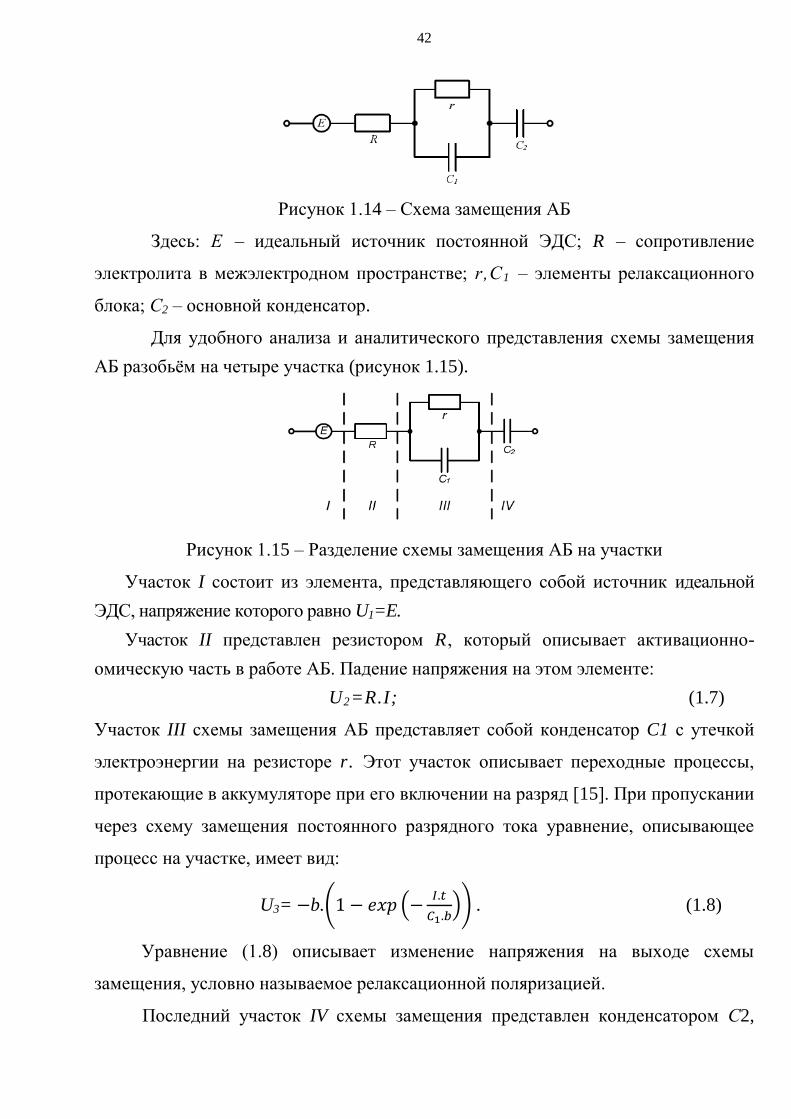
Для удобного анализа и аналитического представления схемы замещения
АБ разобьём на четыре участка (рисунок 1.15).
Рисунок 1.15 – Разделение схемы замещения АБ на участки
Участок I состоит из элемента, представляющего собой источник идеальной
ЭДС, напряжение которого равно U1=E.
Участок II представлен резистором R, который описывает активационно-
омическую часть в работе АБ. Падение напряжения на этом элементе:
U2=R.I; (1.7)
Участок III схемы замещения АБ представляет собой конденсатор C1 с утечкой
электроэнергии на резисторе r. Этот участок описывает переходные процессы,
протекающие в аккумуляторе при его включении на разряд [15]. При пропускании
через схему замещения постоянного разрядного тока уравнение, описывающее
процесс на участке, имеет вид:
U3= −b.(1 − 𝑒𝑥𝑝 (−𝐼.𝑡
𝐶1.𝑏)) . (1.8)
Уравнение (1.8) описывает изменение напряжения на выходе схемы
замещения, условно называемое релаксационной поляризацией.
Последний участок IV схемы замещения представлен конденсатором С2,
43
который соответствует основной токообразующей электрохимической реакции.
При пропускании через схему постоянного разрядного тока уравнение,
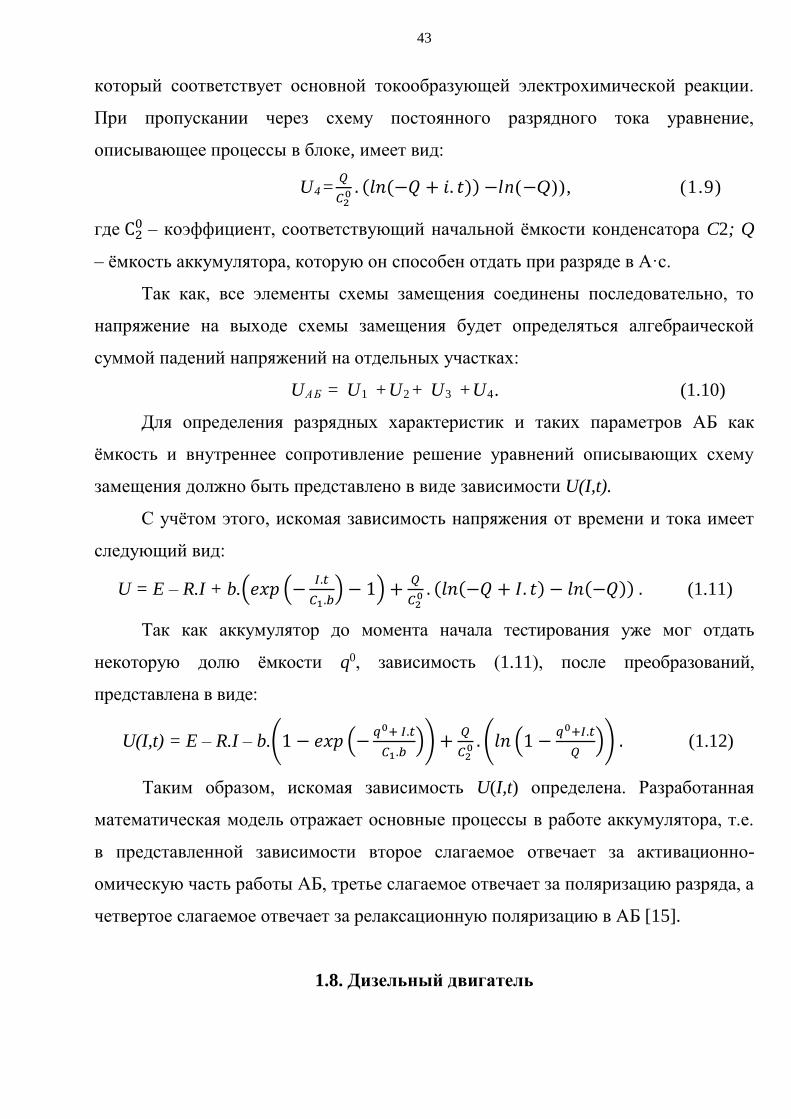
описывающее процессы в блоке, имеет вид:
U4=𝑄
𝐶20 . (𝑙𝑛 (−𝑄 + 𝑖. 𝑡)) −ln(−Q)), (1.9)
где С20 – коэффициент, соответствующий начальной ёмкости конденсатора C2; Q
– ёмкость аккумулятора, которую он способен отдать при разряде в А·с.
Так как, все элементы схемы замещения соединены последовательно, то
напряжение на выходе схемы замещения будет определяться алгебраической
суммой падений напряжений на отдельных участках:
UАБ = U1 +U2+ U3 +U4 . (1.10)
Для определения разрядных характеристик и таких параметров АБ как
ёмкость и внутреннее сопротивление решение уравнений описывающих схему
замещения должно быть представлено в виде зависимости U(I,t).
С учётом этого, искомая зависимость напряжения от времени и тока имеет
следующий вид:
U = E – R.I + b.(𝑒𝑥𝑝 (−𝐼.𝑡
𝐶1.𝑏) − 1) +
𝑄
𝐶20 . (𝑙𝑛(−𝑄 + 𝐼. 𝑡) − 𝑙𝑛(−𝑄)) . (1.11)
Так как аккумулятор до момента начала тестирования уже мог отдать
некоторую долю ёмкости q0, зависимость (1.11), после преобразований,
представлена в виде:
U(I,t) = E – R.I – b.(1 − 𝑒𝑥𝑝 (−𝑞0+ 𝐼.𝑡
𝐶1.𝑏)) +
𝑄
𝐶20 . (𝑙𝑛 (1 −
𝑞0+𝐼.𝑡
𝑄)) . (1.12)
Таким образом, искомая зависимость U(I,t) определена. Разработанная
математическая модель отражает основные процессы в работе аккумулятора, т.е.
в представленной зависимости второе слагаемое отвечает за активационно-
омическую часть работы АБ, третье слагаемое отвечает за поляризацию разряда, а
четвертое слагаемое отвечает за релаксационную поляризацию в АБ [15].
1.8. Дизельный двигатель
44
Благодаря высокой эффективности дизельный двигатель (ДД) широко
применяется на грузовых автомобилях, дизель-поездах и электробусах. Более того,
большинство легковых автомобилей имеют в линейке своих моторов ДД. В
Европе дизель постепенно вытесняет бензиновые двигатели, к примеру, свыше 50%
новых легковых автомобилей там имеют ДД и т.д.
Дизельный двигатель имеет ряд отличительных особенностей:
1. Имеет большую степень сжатия и как следствие более высокий
коэффициент полезного действия, по сравнению с бензиновым двигателем, но
больший вес и габариты, низкий расход топлива;
2. Имеет низкие обороты коленчатого вала и как следствие меньшую удельную
мощность, сопровождаемые неполным сгоранием топлива, сажеобразованием;
3. Не имеет дроссельной заслонки, поэтому развивает высокий крутящий
момент на низких оборотах;
4. Имеет сложную конструкцию топливной аппаратуры и, как следствие,
высокую чувствительность к качеству топлива [16, 74].
Учитывая, что часто требуемая мощность заряда АБ составляет более 1
МВт и приняв к.п.д. дизель-генераторной установки 0,87, получим, что мощность
дизельной электростанции на выходе должна составлять 1,15 МВт или выше, а
двигатель должен обеспечивать частоту вращения 1500 об/мин. Перечисленным
требованиям полностью удовлетворяет дизельная электростанция FGWil-
sonP1650E [17, 93].
Дизельный двигатель и ВИГ соединены коаксиально, ДД создает
механическую энергию для передачи ВИГ. Однако, при запуске дизельного
двигателя может быть использован двигательный режим работы ВИГ [18].
В таблице 1.3 приведены основные технические характеристики FG Wilson
P1650E, а на рисунке 1.16 показан общий вид дизельная электростанция FG
Wilson P1650E (1320 кВт).
Таблица 1.3 – Основные технические характеристики FG Wilson P1650E
Наименование параметра Значение
Мощность, кВт 1320
Выходное напряжение, В 380-415

45
Частота выходного напряжения, Гц 50
Модель двигателя Perkins 4012TAG2A
Модель генератора LeroySomer LL8124P
Количество цилиндров 12V
Диаметр поршня/ход поршня, мм 160/190
Скорость вращения двигателя, об./мин. 1500
Максимальная мощность двигателя, кВт 1422
Рисунок 1.16 – FG Wilson P1650E (1320 кВт) - дизельная электростанция
Механические характеристики дизельного двигателя: крутящий момент
двигателя рассчитывается в соответствии с формулой [18, 19]:
,9 5 5 0e
e
en
PM (1.13)
])()([32
m a x
N
e
N
e
N
e
en
nc
n
nb
n
naPP , (1.14)
где Pe, Me, ne – мощность двигателя, кВт, крутящий момент, Нм, количество
оборотов коленчатого вала в минуту; Pmax, nN ‒ максимальные мощность
двигателя и количество оборотов коленчатого вала. a,b,c – эмпирические
коэффициенты.
У четырехтактного дизельного двигателя есть камера сгорания с
эмпирическими коэффициентами: a = 0,5; b = 1,5; c = 1 [18]. Мощность двигателя
линейно зависима от частоты вращения коленчатого вала: чем выше обороты, тем
больше мощность мотора (естественно, до определенных пределов). Крутящий
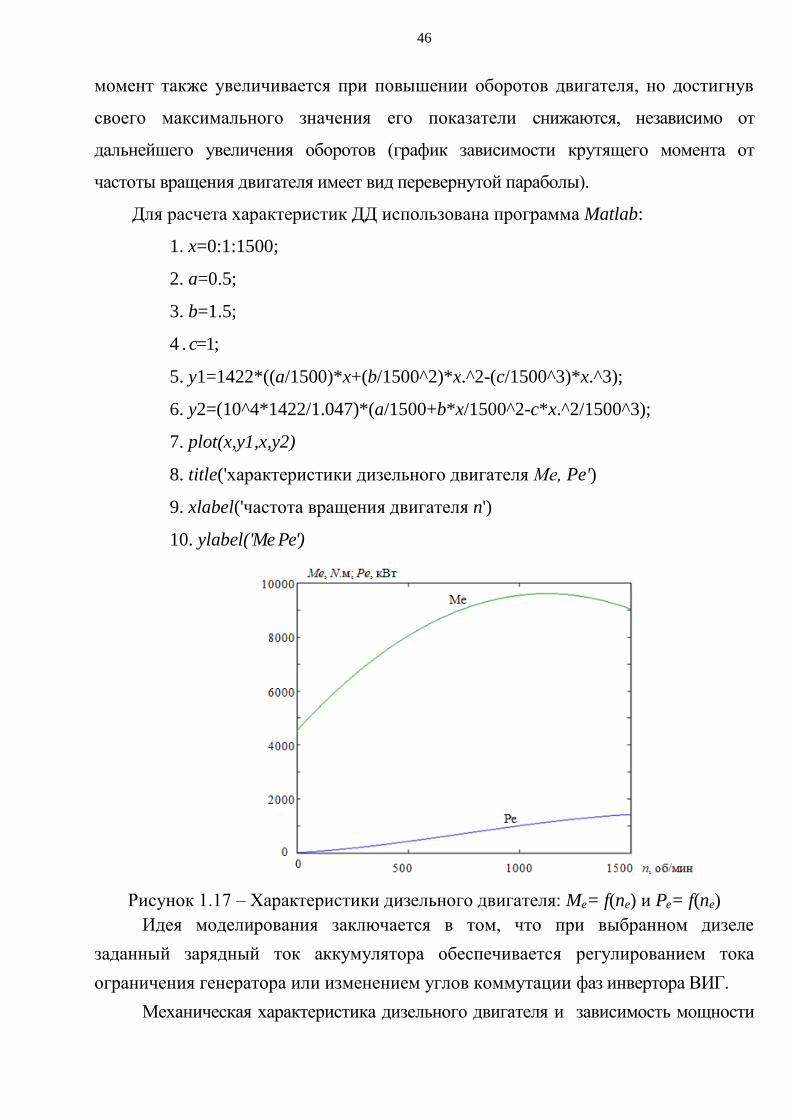
46
момент также увеличивается при повышении оборотов двигателя, но достигнув
своего максимального значения его показатели снижаются, независимо от
дальнейшего увеличения оборотов (график зависимости крутящего момента от
частоты вращения двигателя имеет вид перевернутой параболы).
Для расчета характеристик ДД использована программа Matlab:
1. x=0:1:1500;
2. a=0.5;
3. b=1.5;
4 . c=1;
5. y1=1422*((a/1500)*x+(b/1500^2)*x.^2-(c/1500^3)*x.^3);
6. y2=(10^4*1422/1.047)*(a/1500+b*x/1500^2-c*x.^2/1500^3);
7. plot(x,y1,x,y2)
8. title('характеристики дизельного двигателя Ме, Pe')
9. xlabel('частота вращения двигателя n')
10. ylabel('Me Pe')
Рисунок 1.17 – Характеристики дизельного двигателя: Me= f(ne) и Pe= f(ne)
Идея моделирования заключается в том, что при выбранном дизеле
заданный зарядный ток аккумулятора обеспечивается регулированием тока
ограничения генератора или изменением углов коммутации фаз инвертора ВИГ.
Механическая характеристика дизельного двигателя и зависимость мощности
47
двигателя от количества оборотов коленчатого вала, MenPe(n) показаны на рис. 1.17
[18].
Выводы по главе 1
1. Приведен обзор существующих зарядно-разрядных комплексов.
Определены функциональные требования, которым должен соответствовать
новый автономный зарядно-разрядный комплекс. АЗР ЭТК АБ обеспечивает
автономность и эксплуатацию в условиях широкого диапазона, значений
влажности и температуры окружающей среды, обеспечивает экономию
электроэнергии [115], затрачиваемой в процессе неоднократных циклов заряда-
разряда АБ большой емкости и имеет систему мониторинга АБ.
2. Выбрана схема замещения аккумуляторной батареи, выполнен анализ
алгоритмов заряда и заряда-разряда аккумуляторов, установлены конечные
значения напряжений аккумуляторов в процессе разряда, определен момент
окончания заряда, установлены параметры формовочных циклов.
3. Для построения системы мониторинга состояния АБ определен перечень
зарядных характеристик АБ и параметры, от которых они зависят.
4. Представлена структурная схема автономного зарядно-разрядного
электротехнического комплекса. Определены основные характеристики
комплекса и выполнено описание режимов функционирования АЗРЭТК.
ГЛАВА 2. РАСЧЕТ, ПРОЕКТИРОВАНИЕ И МОДЕЛИРОВАНИЕ
ВЕНТИЛЬНО-ИНДУКТОРНОГО ГЕНЕРАТОРА ДЛЯ АЗР ЭТК.
В этой главе представлена математическая модель, алгоритм и результаты
расчета вентильно-индукторных генераторов разной мощности. Была обоснована
конфигурация статора/ротора генератора – 18/12. Для выбранной конфигурации в
программных комплексах Elcut и Matlab-Simulink [26, 27] выполнены расчеты
основных параметров и характеристик генераторов мощностью 1320, 1250 и 1100
кВт. Предложены рациональные принципы построения структуры и алгоритмов
регулирования вентильно-индукторного генератора. Представлены возможные
48
варианты реализации ВИГ, проведен анализ работы ВИГ в двух возможных
электрических схемах, с управляемым инвертором на выходе и с неуправляемым
выпрямителем на выходе. Исследованы режимы работы и способы управления
генератором. Рассмотрено влияние коммутационных параметров на основные
показатели ВИГ в разных режимах [34].
Рассчитаны зависимости выходной мощности и действующего значения
тока фазы от изменения углов управления для генераторного режима ВИГ,
сотоящего из двух блоков мощностью по 550 кВт – ВИГ-2х550 [34].
Решены подзадачи:
1) Математические модели ВИГ;
2) Расчет ВИГ мощностью 1320 кВт и ВИГ мощностью 1250 кВт;
3) Разработана методика расчета ВИГ для АЗРЭТК;
4) Построение характеристики ВИГ- 1320 кВт и ВИГ- 1250кВт;
5) Моделирование ВИГ- 1320 кВт и ВИГ- 1250 кВт;
2.1. Математическая модель вентильно-индукторного генератора
Генератор представляет собой вентильно-индукторную электрическую
машину, управляющуюся с помощью полупроводникового преобразователя. За
рубежом такие генераторы известны как "Switched reluctance generator" (SRG).
Основная задача, решающаяся с помощью вентильно-индукторного генератора
(ВИГ), это: стабилизация параметров выходного напряжения при переменной
частоте вращения вала генератора [18]. ВИГ имеет ряд особенностей, которые
выгодно его отличают от других типов электрогенераторов. Это, прежде всего,
простота конструкции, без обмотки ротора, сосредоточенная обмотка статора,
технологичность изготовления, ремонтопригодность. ВИГ имеет высокие
энергетические и массогабаритные показатели [9]. ВИГ обеспечивает
конкурентные преимущества перед генераторами постоянного тока, синхронного
типа и другими: низким уровнем вибраций, шума и повышенной
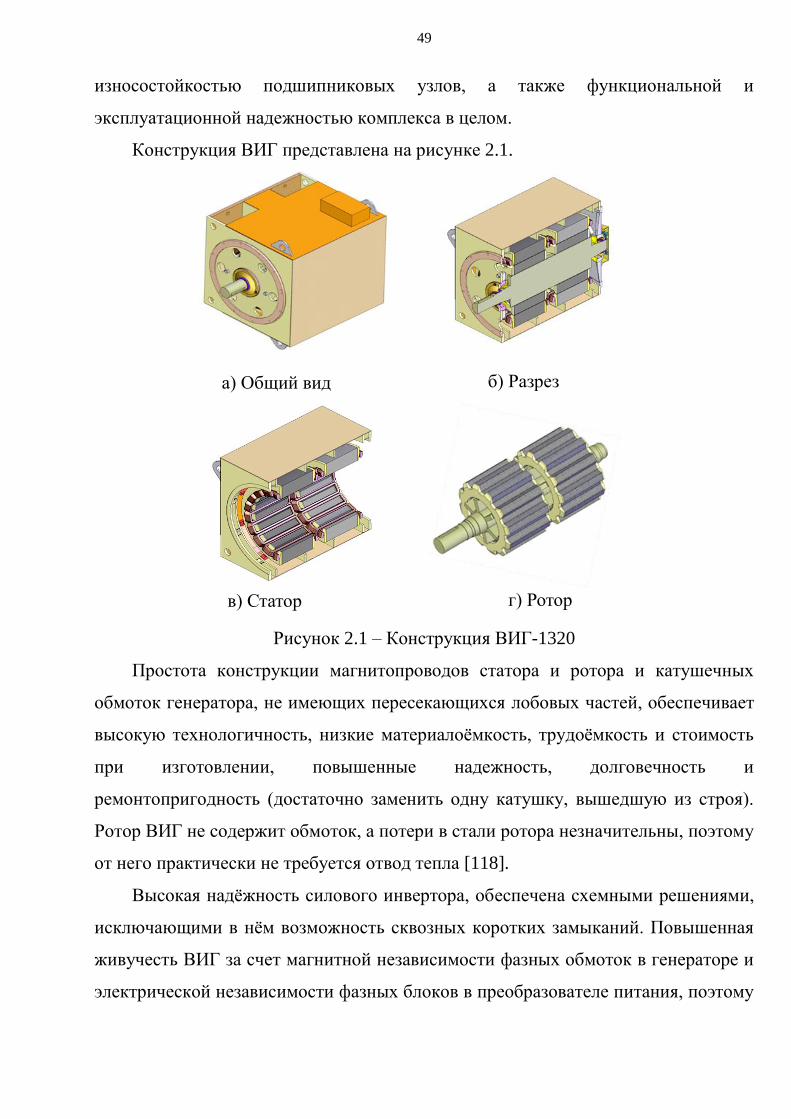
49
износостойкостью подшипниковых узлов, а также функциональной и
эксплуатационной надежностью комплекса в целом.
Конструкция ВИГ представлена на рисунке 2.1.
Рисунок 2.1 – Конструкция ВИГ-1320
Простота конструкции магнитопроводов статора и ротора и катушечных
обмоток генератора, не имеющих пересекающихся лобовых частей, обеспечивает
высокую технологичность, низкие материалоёмкость, трудоёмкость и стоимость
при изготовлении, повышенные надежность, долговечность и
ремонтопригодность (достаточно заменить одну катушку, вышедшую из строя).
Ротор ВИГ не содержит обмоток, а потери в стали ротора незначительны, поэтому
от него практически не требуется отвод тепла [118].
Высокая надёжность силового инвертора, обеспечена схемными решениями,
исключающими в нём возможность сквозных коротких замыканий. Повышенная
живучесть ВИГ за счет магнитной независимости фазных обмоток в генераторе и
электрической независимости фазных блоков в преобразователе питания, поэтому
а. а. а) Общий вид б) Разрез
в) Статор г) Ротор
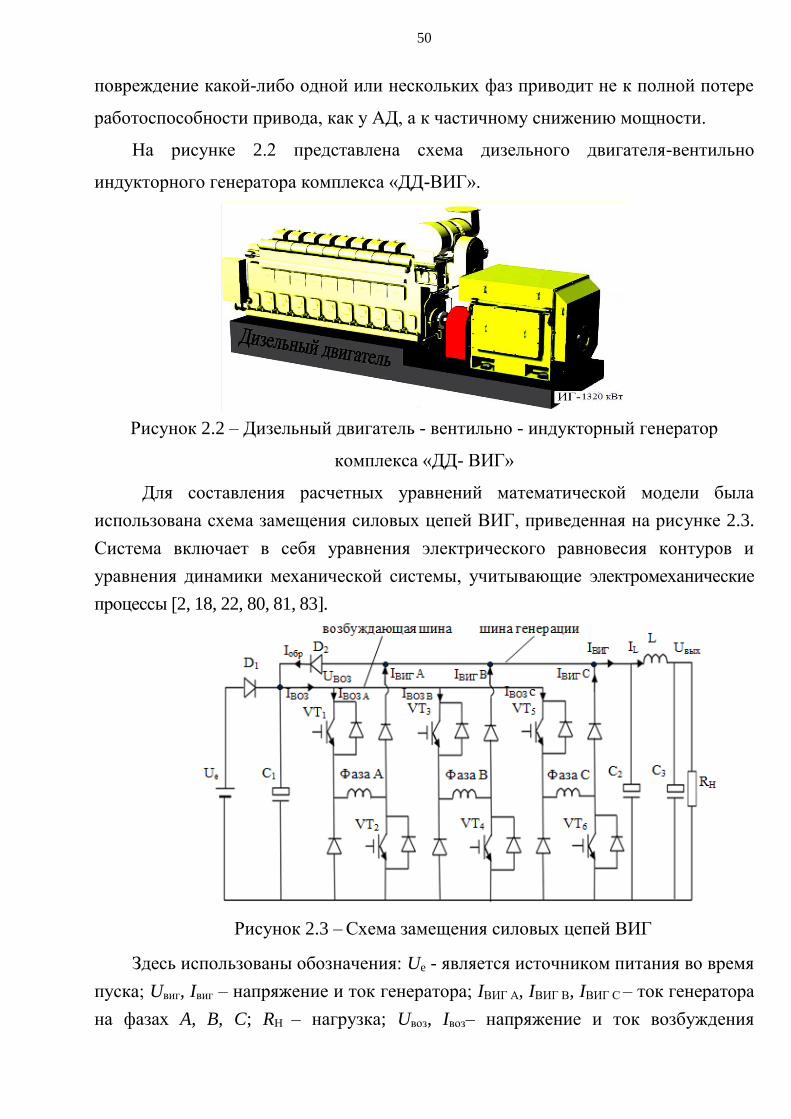
50
повреждение какой-либо одной или нескольких фаз приводит не к полной потере
работоспособности привода, как у АД, а к частичному снижению мощности.
На рисунке 2.2 представлена схема дизельного двигателя-вентильно
индукторного генератора комплекса «ДД-ВИГ».
Рисунок 2.2 – Дизельный двигатель - вентильно - индукторный генератор
комплекса «ДД- ВИГ»
Для составления расчетных уравнений математической модели была
использована схема замещения силовых цепей ВИГ, приведенная на рисунке 2.3.
Система включает в себя уравнения электрического равновесия контуров и
уравнения динамики механической системы, учитывающие электромеханические
процессы [2, 18, 22, 80, 81, 83].
Рисунок 2.3 – Схема замещения силовых цепей ВИГ
Здесь использованы обозначения: Ue - является источником питания во время
пуска; Uвиг, Iвиг – напряжение и ток генератора; IВИГ А, IВИГ В, IВИГ С – ток генератора
на фазах A, B, C; RH – нагрузка; Uвоз, Iвоз– напряжение и ток возбуждения
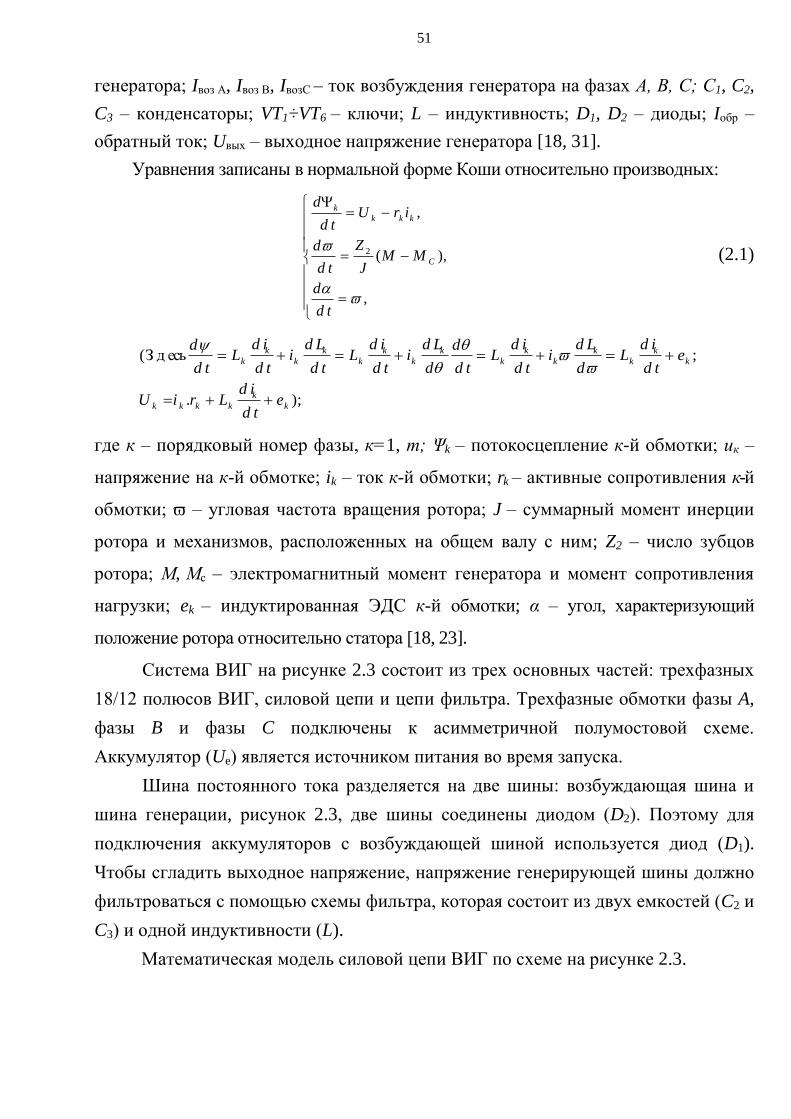
51
генератора; Iвоз А, Iвоз В, IвозС – ток возбуждения генератора на фазах A, B, C; С1, C2,
C3 – конденсаторы; VT1÷VT6 – ключи; L – индуктивность; D1, D2 – диоды; Iобр –
обратный ток; Uвых – выходное напряжение генератора [18, 31].
Уравнения записаны в нормальной форме Коши относительно производных:
,
,
)(
,
2
d t
d
MMJ
Z
d t
d
irUd t
d
C
kkk
k
(2.1)
);.
; З д есь(
k
k
kkkk
k
k
k
k
k
k
k
k
k
k
k
k
k
k
k
ed t
d iLriU
ed t
d iL
d
d Li
d t
d iL
d t
d
d
d Li
d t
d iL
d t
d Li
d t
d iL
d t
d
где к – порядковый номер фазы, к=1, т; Ψk – потокосцепление к-й обмотки; ик –
напряжение на к-й обмотке; ik – ток к-й обмотки; rk – активные сопротивления к-й
обмотки; ϖ – угловая частота вращения ротора; J – суммарный момент инерции
ротора и механизмов, расположенных на общем валу с ним; Z2 – число зубцов
ротора; М, Мс – электромагнитный момент генератора и момент сопротивления
нагрузки; ek – индуктированная ЭДС к-й обмотки; α – угол, характеризующий
положение ротора относительно статора [18, 23].
Система ВИГ на рисунке 2.3 состоит из трех основных частей: трехфазных
18/12 полюсов ВИГ, силовой цепи и цепи фильтра. Трехфазные обмотки фазы A,
фазы B и фазы C подключены к асимметричной полумостовой схеме.
Аккумулятор (Ue) является источником питания во время запуска.
Шина постоянного тока разделяется на две шины: возбуждающая шина и
шина генерации, рисунок 2.3, две шины соединены диодом (D2). Поэтому для
подключения аккумуляторов с возбуждающей шиной используется диод (D1).
Чтобы сгладить выходное напряжение, напряжение генерирующей шины должно
фильтроваться с помощью схемы фильтра, которая состоит из двух емкостей (C2 и
C3) и одной индуктивности (L).
Математическая модель силовой цепи ВИГ по схеме на рисунке 2.3.
52
,L
,/)(
,
,.
выхВИГ
3выхвых
2
ВИГВИГ
1
ВОЗобр
11
ВОЗ В ОЗ
UU
d t
d i
CR
Ui
d t
d U
C
iI
d t
d U
C
II
RC
UU
d t
d U
L
L
L
L
D
e
(2.2)
Ток возбуждения генератора : IВОЗ = IВОЗ А+IВОЗ В+ IВОЗ С . (2.3)
Ток генератора: IВИГ = IВИГ А+ IВИГ В+ IВИГ С . (2.4)
Расчёт генератора ВИГ-1320 кВт был проведен в программной среде,
представленной в [18].
2.2. Алгорим расчёта вентильно - индукторного генератора
Число зубцов статора обозначается Z1, а ротора – Z2. С учетом этих
обозначений число зубцов на роторе может определяться по формуле [62] :
,*)1(12 pNm
jZZ (2.5)
где j – произвольное число, m – число фаз, Np – число катушек в ВИГ.
При проектировании должна быть задана мощность электрической машины
и характеристика нагрузки. Так как, естественная характеристика индукторной
машины носит обратно-квадратичный характер (чем больше частота, тем момент
меньше в квадрате – M~1/n2), для расчета обычно достаточно выбирать точку с
максимальной скоростью. В этом случае энергия машины может быть определена
по формуле:
,...
..22
21
lkZZ
MW
t
(2.6)
где kt = t2/t0 – коэффициент приведения вебер-амперных характеристик,
рассчитанных предварительно для базового зубцового деления ротора t0, к
действительному значению t2 (t2= πD2/Z2); D2 – диаметр ротора по воздушному
зазору, lδ – длина пакета статора (ротора) по зазору [119].
53
Формула выводится из положения, что работа, совершаемая генератором за
один оборот, равна произведению угла поворота на момент 2M (A=φ.M – формула
вращательного движения, для поступательного - A = S.F). За один оборот во
взаимодействие придут все зубцы ротора Z2, при этом каждый с каждым зубцом
статора Z1. В итоге работа, она же энергия, совершаемая зубцовым делением за
цикл коммутации, меньше работы генератора за оборот в Z1⋅Z2 раз.
Коэффициенты kt и lδ нужны для перехода от одного подобного зубцового
деления к другому (kt), от одной длины пакета к другой (lδ) [62].
По полученной энергии можно определить необходимое число витков. Для
этого сначала определяем значение максимального потока по заранее
рассчитанным зависимостям Фmax= f(Fn) для различных δ∗ (рисунок 2.4), где [62].
Эти зависимости рассчитаны для различных зазоров и приведены к зубцовому
делению t0 = 0,1 м (здесь относительный зазор δ∗ является отношением
абсолютного зазора к абсолютному зубцовому делению).
Число витков определяется по формуле [62]:
ma
ZlkZf
kkkrIUW
t
упрrkmd
k
1
m ax22 .....
.)...(
, (2.7)
где коэффициент kупр=160/360 – учитывает закон управления генератором; kr =
0,65...0,75 учитывает влияние активного сопротивления фазной катушки на
величину Фmax при изменении зазора в диапазоне δ∗ = 0,005...0,04, причем
меньшее значение kr соответствует меньшим зазорам; rk – активное сопротивление
фазы; Im – амплитудное значение фазного тока (первоначально задаются равными
0, а в дальнейшем уточняются); kσ= 0,9...0,98 учитывает влияние индуктивности
рассеяния на снижение потока в зазоре, его меньшее значение соответствует
большим зазорам δ∗; f2 – частота вращения ротора; Ud – напряжение питания; m –
число фаз; a – число параллельных ветвей фазной обмотки [119].
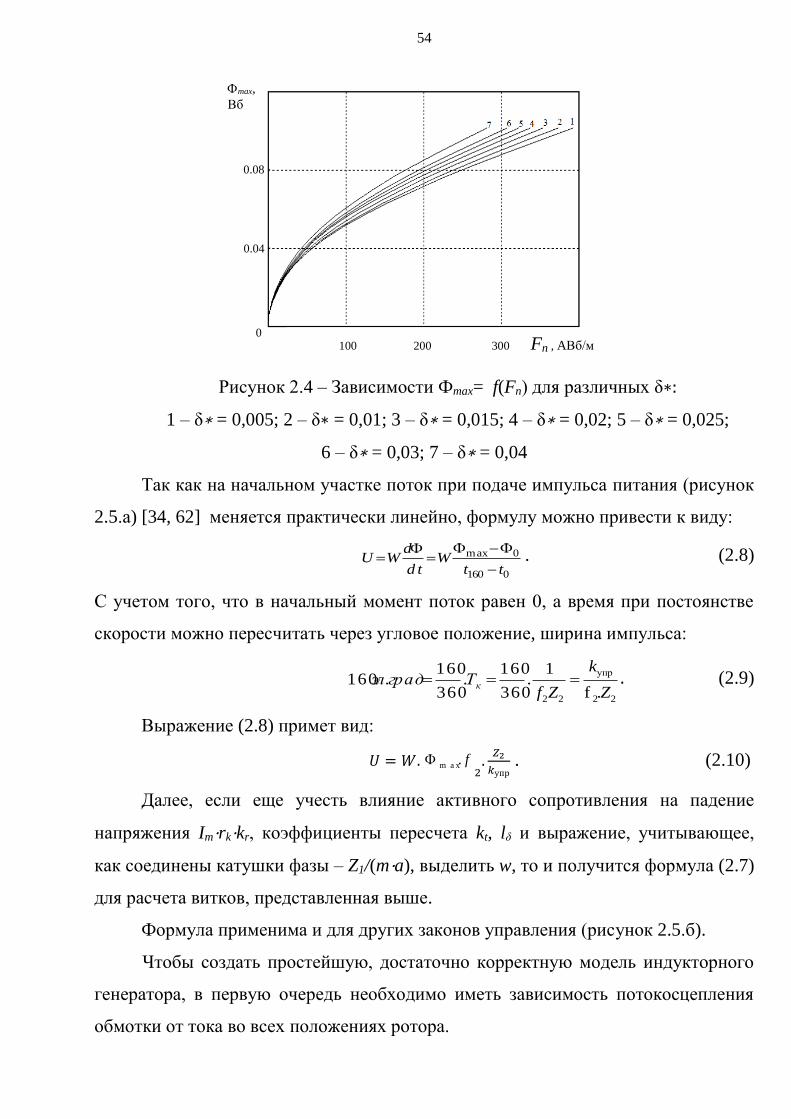
54
Рисунок 2.4 – Зависимости Фmax= f(Fn) для различных δ∗:
1 – δ∗ = 0,005; 2 – δ∗ = 0,01; 3 – δ∗ = 0,015; 4 – δ∗ = 0,02; 5 – δ∗ = 0,025;
6 – δ∗ = 0,03; 7 – δ∗ = 0,04
Так как на начальном участке поток при подаче импульса питания (рисунок
2.5.а) [34, 62] меняется практически линейно, формулу можно привести к виду:
0160
0max
ttW
d t
dWU
. (2.8)
С учетом того, что в начальный момент поток равен 0, а время при постоянстве
скорости можно пересчитать через угловое положение, ширина импульса:
22
упр
22 .f
1.
360
160.
360
160.160
Z
k
ZfТградэл к . (2.9)
Выражение (2.8) примет вид:
𝑈 = 𝑊. f.m a x2
.𝑍2
𝑘упр . (2.10)
Далее, если еще учесть влияние активного сопротивления на падение
напряжения Im⋅rk⋅kr, коэффициенты пересчета kt, lδ и выражение, учитывающее,
как соединены катушки фазы – Z1/(m⋅a), выделить w, то и получится формула (2.7)
для расчета витков, представленная выше.
Формула применима и для других законов управления (рисунок 2.5.б).
Чтобы создать простейшую, достаточно корректную модель индукторного
генератора, в первую очередь необходимо иметь зависимость потокосцепления
обмотки от тока во всех положениях ротора.
100 200 300 Fn , AВб/м
max,
Вб
0.08
0.04
0
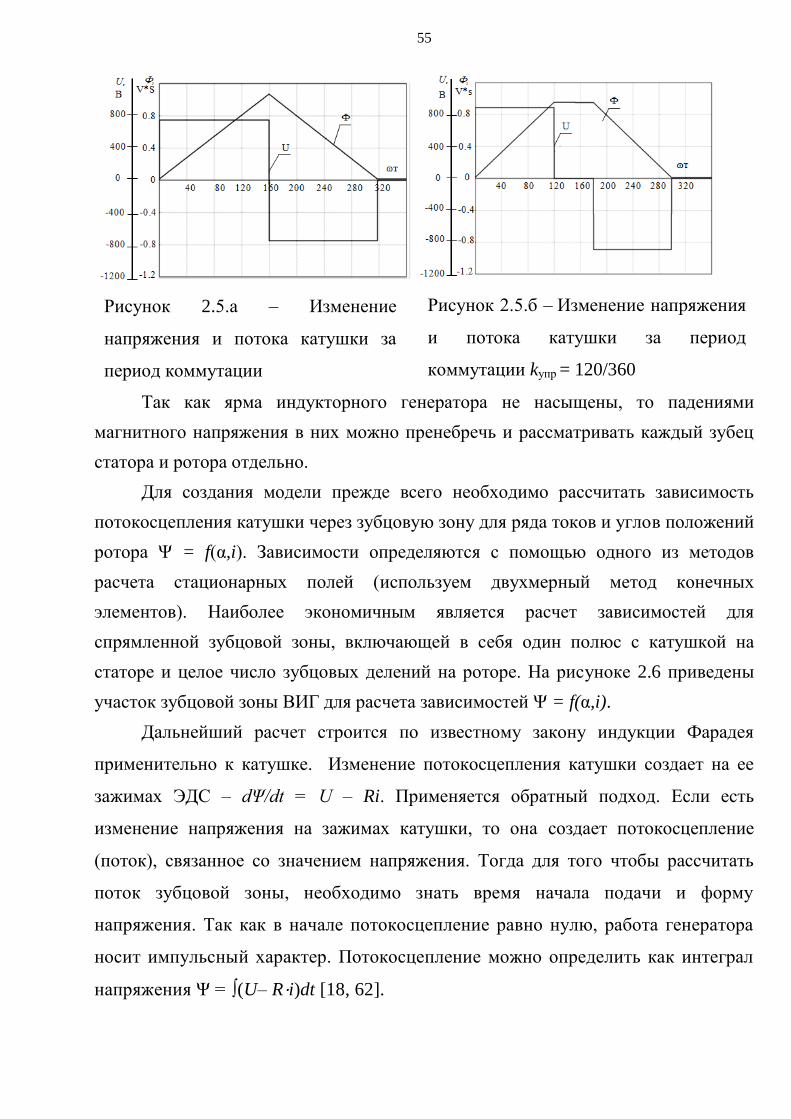
55
Так как ярма индукторного генератора не насыщены, то падениями
магнитного напряжения в них можно пренебречь и рассматривать каждый зубец
статора и ротора отдельно.
Для создания модели прежде всего необходимо рассчитать зависимость
потокосцепления катушки через зубцовую зону для ряда токов и углов положений
ротора Ψ = f(α,i). Зависимости определяются с помощью одного из методов
расчета стационарных полей (используем двухмерный метод конечных
элементов). Наиболее экономичным является расчет зависимостей для
спрямленной зубцовой зоны, включающей в себя один полюс с катушкой на
статоре и целое число зубцовых делений на роторе. На рисуноке 2.6 приведены
участок зубцовой зоны ВИГ для расчета зависимостей Ψ = f(α,i).
Дальнейший расчет строится по известному закону индукции Фарадея
применительно к катушке. Изменение потокосцепления катушки создает на ее
зажимах ЭДС – dΨ/dt = U – Ri. Применяется обратный подход. Если есть
изменение напряжения на зажимах катушки, то она создает потокосцепление
(поток), связанное со значением напряжения. Тогда для того чтобы рассчитать
поток зубцовой зоны, необходимо знать время начала подачи и форму
напряжения. Так как в начале потокосцепление равно нулю, работа генератора
носит импульсный характер. Потокосцепление можно определить как интеграл
напряжения Ψ = ∫(U– R⋅i)dt [18, 62].
Рисунок 2.5.а – Изменение
напряжения и потока катушки за
период коммутации
при kупр=160/360
Рисунок 2.5.б – Изменение напряжения
и потока катушки за период
коммутации kупр = 120/360
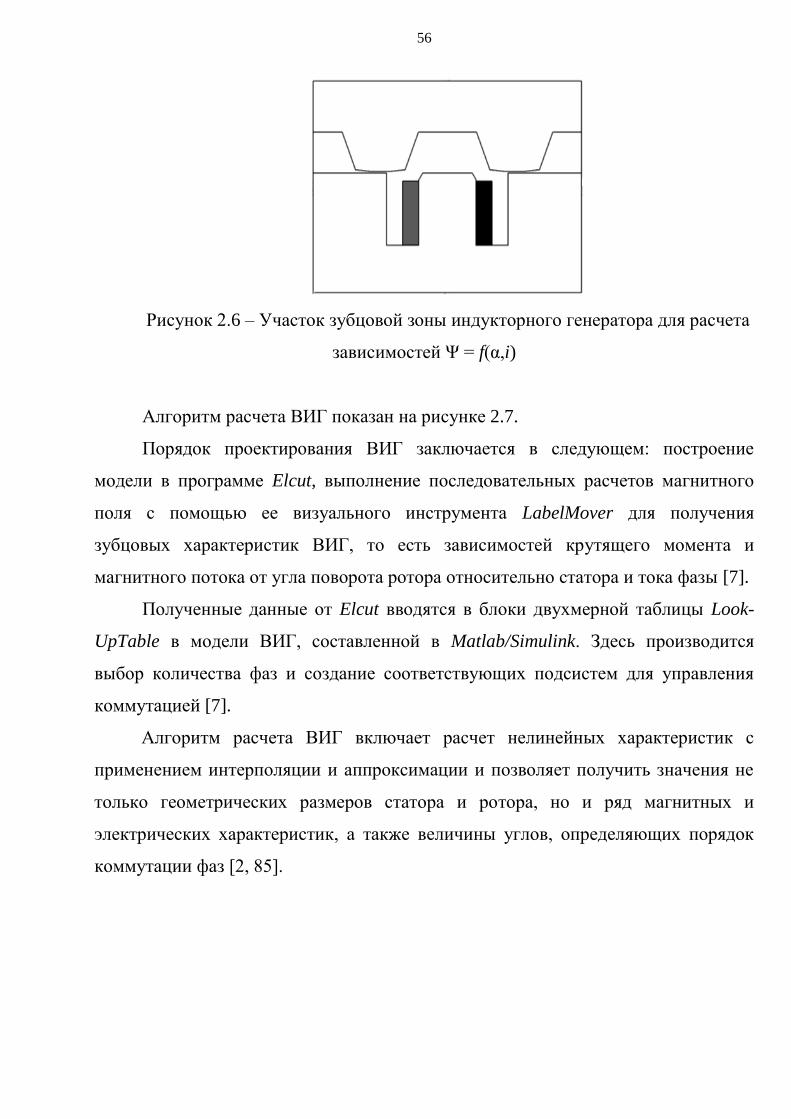
56
Рисунок 2.6 – Участок зубцовой зоны индукторного генератора для расчета
зависимостей Ψ = f(α,i)
Алгоритм расчета ВИГ показан на рисунке 2.7.
Порядок проектирования ВИГ заключается в следующем: построение
модели в программе Elcut, выполнение последовательных расчетов магнитного
поля с помощью ее визуального инструмента LabelMover для получения
зубцовых характеристик ВИГ, то есть зависимостей крутящего момента и
магнитного потока от угла поворота ротора относительно статора и тока фазы [7].
Полученные данные от Elcut вводятся в блоки двухмерной таблицы Look-
UpTable в модели ВИГ, составленной в Matlab/Simulink. Здесь производится
выбор количества фаз и создание соответствующих подсистем для управления
коммутацией [7].
Алгоритм расчета ВИГ включает расчет нелинейных характеристик с
применением интерполяции и аппроксимации и позволяет получить значения не
только геометрических размеров статора и ротора, но и ряд магнитных и
электрических характеристик, а также величины углов, определяющих порядок
коммутации фаз [2, 85].
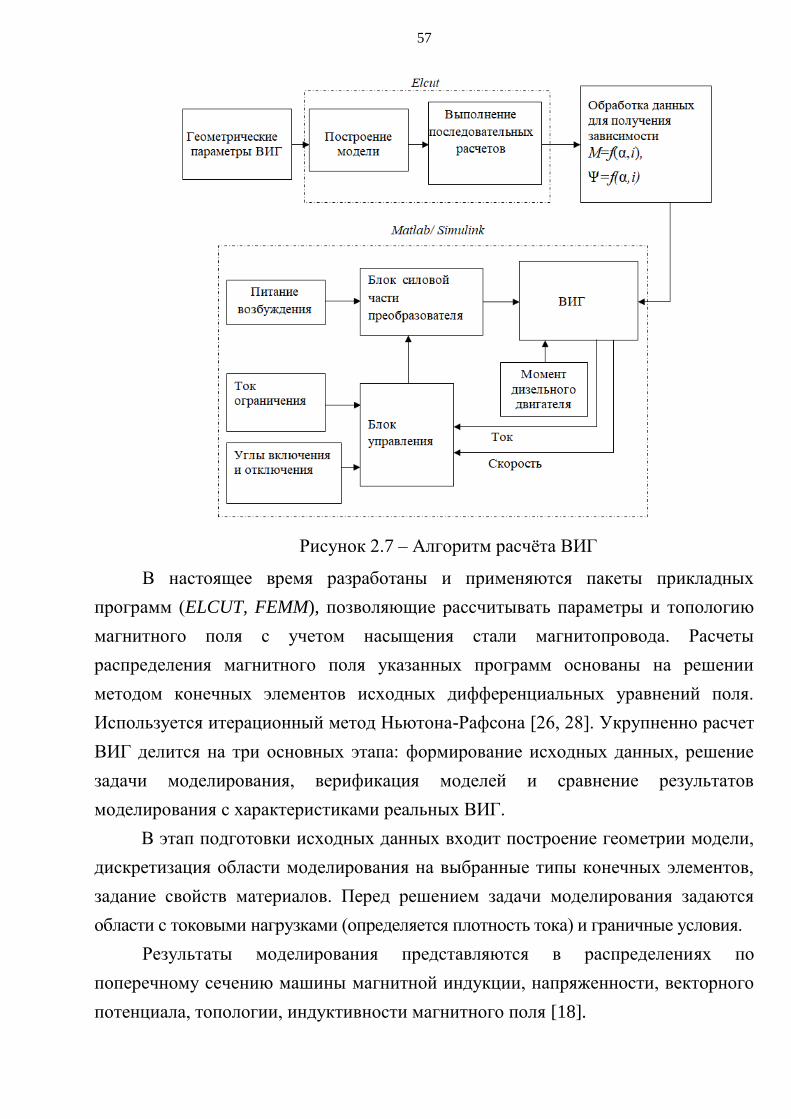
57
Рисунок 2.7 – Алгоритм расчёта ВИГ
В настоящее время разработаны и применяются пакеты прикладных
программ (ELCUT, FEMM), позволяющие рассчитывать параметры и топологию
магнитного поля с учетом насыщения стали магнитопровода. Расчеты
распределения магнитного поля указанных программ основаны на решении
методом конечных элементов исходных дифференциальных уравнений поля.
Используется итерационный метод Ньютона-Рафсона [26, 28]. Укрупненно расчет
ВИГ делится на три основных этапа: формирование исходных данных, решение
задачи моделирования, верификация моделей и сравнение результатов
моделирования с характеристиками реальных ВИГ.
В этап подготовки исходных данных входит построение геометрии модели,
дискретизация области моделирования на выбранные типы конечных элементов,
задание свойств материалов. Перед решением задачи моделирования задаются
области с токовыми нагрузками (определяется плотность тока) и граничные условия.
Результаты моделирования представляются в распределениях по
поперечному сечению машины магнитной индукции, напряженности, векторного
потенциала, топологии, индуктивности магнитного поля [18].

58
Был произведен расчёт генератора мощностью 1320 кВт, основные
параметры приведены в таблице 2.1.
Таблица 2.1 – Основные параметры ВИП- 1320
Наименование параметров ВИГ-1320 Значения
Мощность, кВт 1320
Частота вращения, об/мин 1500
Напряжение питания сети, В 850
КПД, % 94.79
Внешний диаметр пакета статора, мм 990
Диаметр расточки статора, мм 675
Диаметр ротора, мм 672
Длина пакета статора (ротора), мм 530
Воздушный зазор, мм 1,5
Число фаз 6
Число зубцов статора/ротора 18/12
Ширина ярма статора, мм 60.43
Внутренний диаметр ротора, мм 460
Число параллельных ветвей 3
Число витков катушки фазы 14
На рисунке 2.8 приведены габаритные параметры активной зоны ВИГ. На
рисунке 2.8,a приведены геометрия статора и рисунке 2.8,б − геометрия ротора в
поперечном сечении.
Результаты расчета магнитной системы ВИГ-1320 показаны на рисунках 2.9
(Excel, FEMM, ELCUT). Картина поля линий магнитной индукции модели, сетка
поперечного сечения (рисунке 2.9, a) и линии магнитного потока (рисунке 2.9, б)
ВИГ-1320 с соотношением число зубцов 12/18 [18].
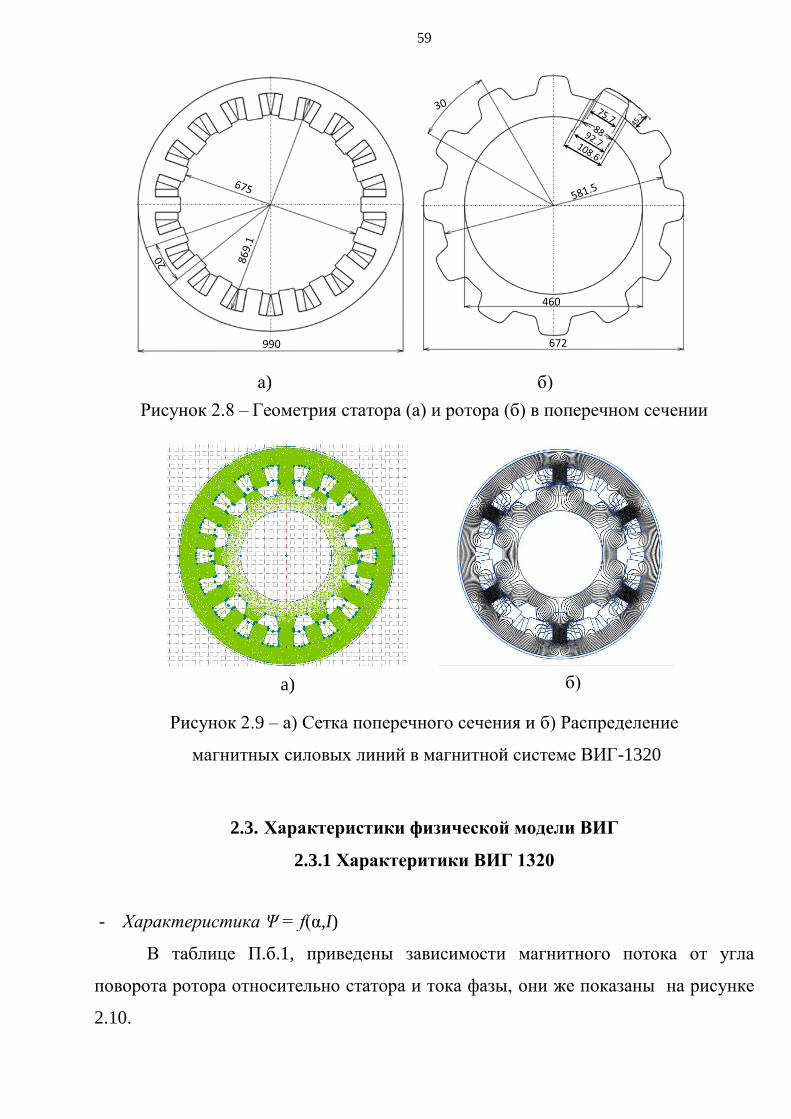
59
Рисунок 2.8 – Геометрия статора (а) и ротора (б) в поперечном сечении
Рисунок 2.9 – а) Сетка поперечного сечения и б) Распределение
магнитных силовых линий в магнитной системе ВИГ-1320
2.3. Характеристики физической модели ВИГ
2.3.1 Характеритики ВИГ 1320
- Характеристика Ψ = f(α,I)
В таблице П.б.1, приведены зависимости магнитного потока от угла
поворота ротора относительно статора и тока фазы, они же показаны на рисунке
2.10.
990 672
460
a) б)
а) б)
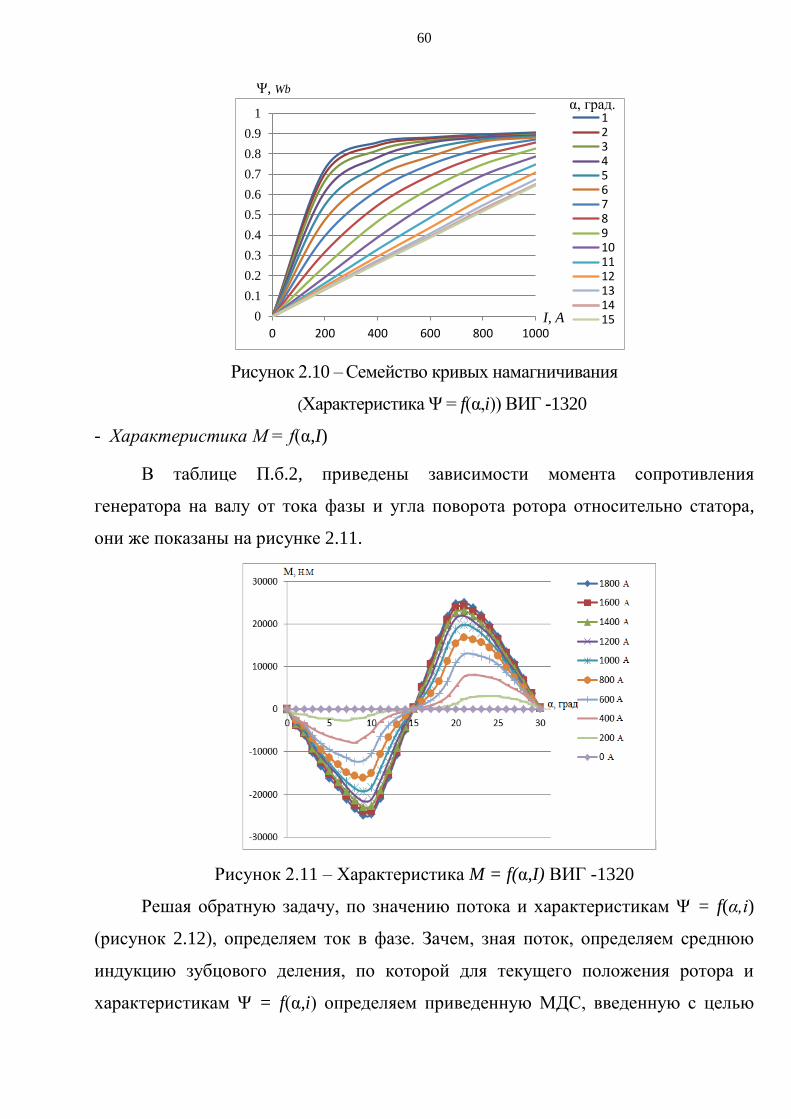
60
Рисунок 2.10 – Семейство кривых намагничивания
(Характеристика Ψ = f(α,i)) ВИГ -1320
- Характеристика M = f(α,I)
В таблице П.б.2, приведены зависимости момента сопротивления
генератора на валу от тока фазы и угла поворота ротора относительно статора,
они же показаны на рисунке 2.11.
Рисунок 2.11 – Характеристика M = f(α,I) ВИГ -1320
Решая обратную задачу, по значению потока и характеристикам Ψ = f(α,i)
(рисунок 2.12), определяем ток в фазе. Зачем, зная поток, определяем среднюю
индукцию зубцового деления, по которой для текущего положения ротора и
характеристикам Ψ = f(α,i) определяем приведенную МДС, введенную с целью
Ψ, Wb
α(0)
I, A 0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
0 200 400 600 800 1000
123456789101112131415
α, град.
I, A
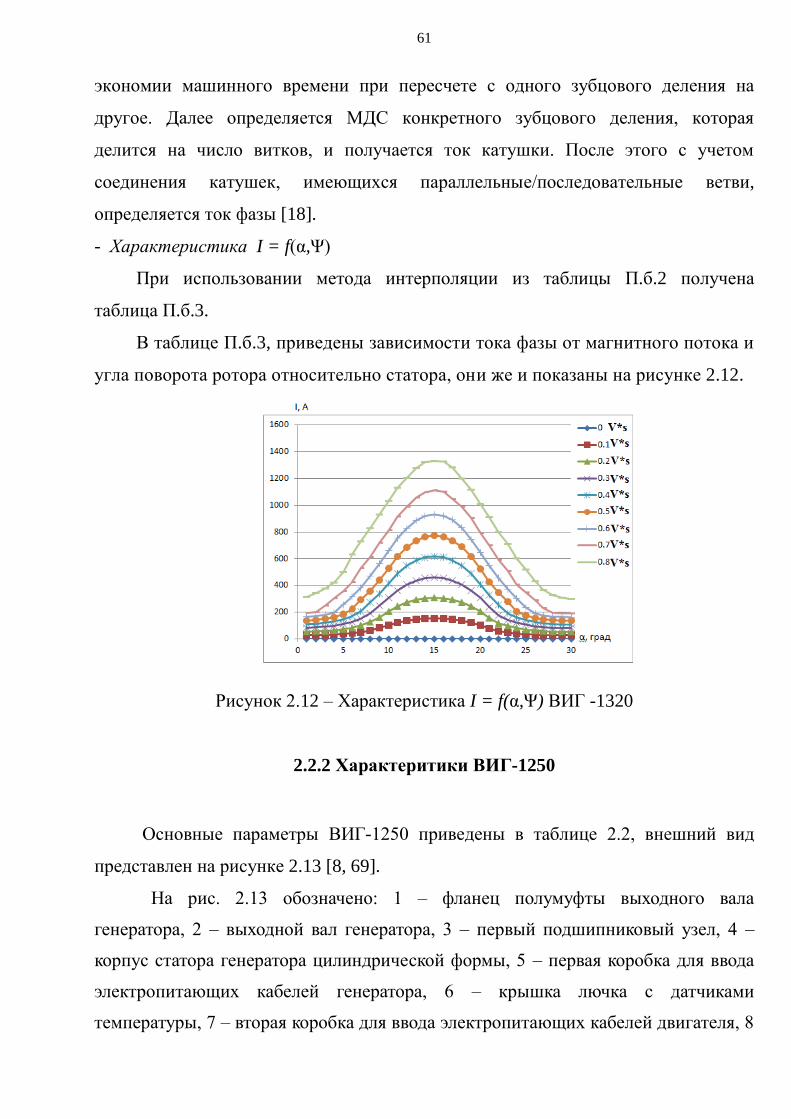
61
экономии машинного времени при пересчете с одного зубцового деления на
другое. Далее определяется МДС конкретного зубцового деления, которая
делится на число витков, и получается ток катушки. После этого с учетом
соединения катушек, имеющихся параллельные/последовательные ветви,
определяется ток фазы [18].
- Характеристика I = f(α,Ψ)
При использовании метода интерполяции из таблицы П.б.2 получена
таблица П.б.3.
В таблице П.б.3, приведены зависимости тока фазы от магнитного потока и
угла поворота ротора относительно статора, они же и показаны на рисунке 2.12.
Рисунок 2.12 – Характеристика I = f(α,Ψ) ВИГ -1320
2.2.2 Характеритики ВИГ-1250
Основные параметры ВИГ-1250 приведены в таблице 2.2, внешний вид
представлен на рисунке 2.13 [8, 69].
На рис. 2.13 обозначено: 1 – фланец полумуфты выходного вала
генератора, 2 – выходной вал генератора, 3 – первый подшипниковый узел, 4 –
корпус статора генератора цилиндрической формы, 5 – первая коробка для ввода
электропитающих кабелей генератора, 6 – крышка лючка с датчиками
температуры, 7 – вторая коробка для ввода электропитающих кабелей двигателя, 8
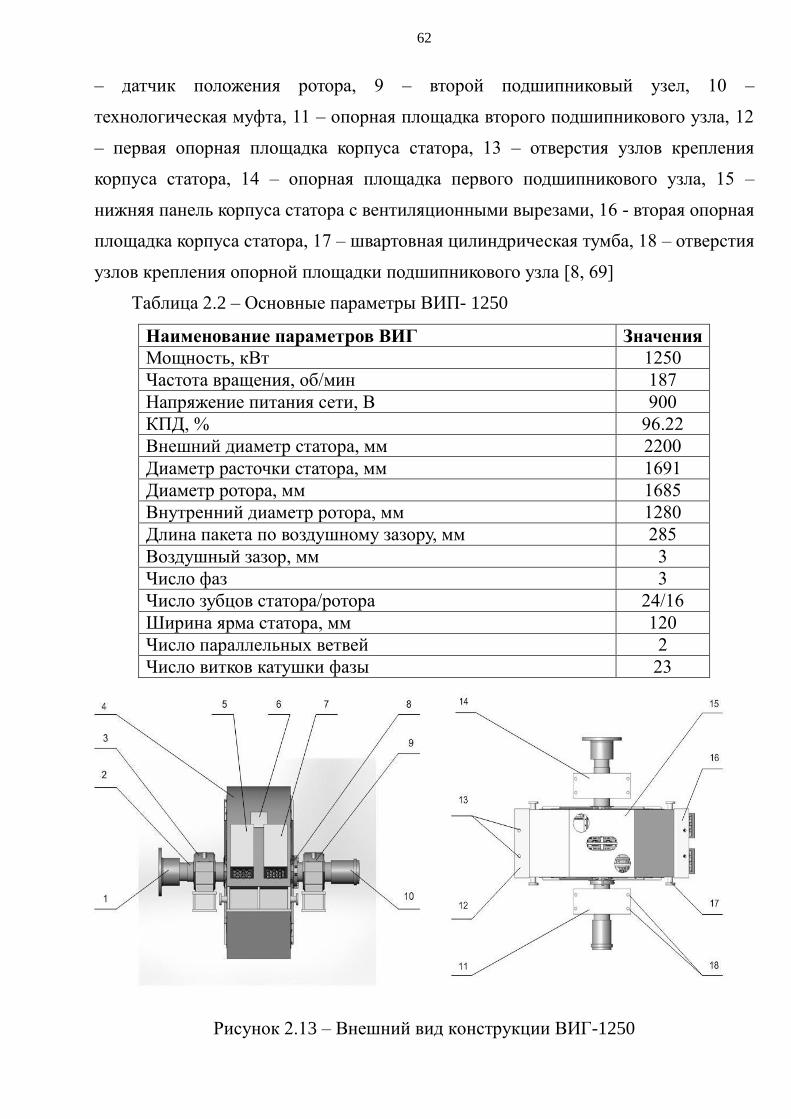
62
– датчик положения ротора, 9 – второй подшипниковый узел, 10 –
технологическая муфта, 11 – опорная площадка второго подшипникового узла, 12
– первая опорная площадка корпуса статора, 13 – отверстия узлов крепления
корпуса статора, 14 – опорная площадка первого подшипникового узла, 15 –
нижняя панель корпуса статора с вентиляционными вырезами, 16 - вторая опорная
площадка корпуса статора, 17 – швартовная цилиндрическая тумба, 18 – отверстия
узлов крепления опорной площадки подшипникового узла [8, 69]
Таблица 2.2 – Основные параметры ВИП- 1250
Наименование параметров ВИГ Значения
Мощность, кВт 1250
Частота вращения, об/мин 187
Напряжение питания сети, В 900
КПД, % 96.22
Внешний диаметр статора, мм 2200
Диаметр расточки статора, мм 1691
Диаметр ротора, мм 1685
Внутренний диаметр ротора, мм 1280
Длина пакета по воздушному зазору, мм 285
Воздушный зазор, мм 3
Число фаз 3
Число зубцов статора/ротора 24/16
Ширина ярма статора, мм 120
Число параллельных ветвей 2
Число витков катушки фазы 23
Рисунок 2.13 – Внешний вид конструкции ВИГ-1250
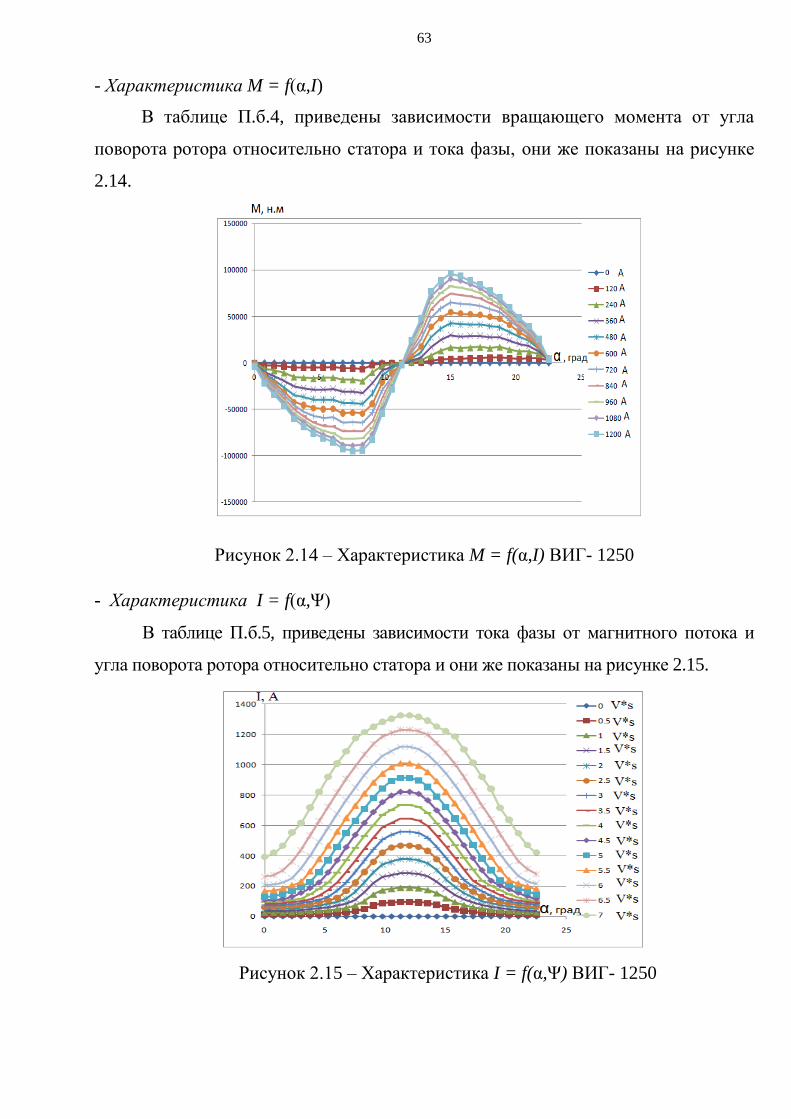
63
- Характеристика M = f(α,I)
В таблице П.б.4, приведены зависимости вращающего момента от угла
поворота ротора относительно статора и тока фазы, они же показаны на рисунке
2.14.
Рисунок 2.14 – Характеристика M = f(α,I) ВИГ- 1250
- Характеристика I = f(α,Ψ)
В таблице П.б.5, приведены зависимости тока фазы от магнитного потока и
угла поворота ротора относительно статора и они же показаны на рисунке 2.15.
Рисунок 2.15 – Характеристика I = f(α,Ψ) ВИГ- 1250
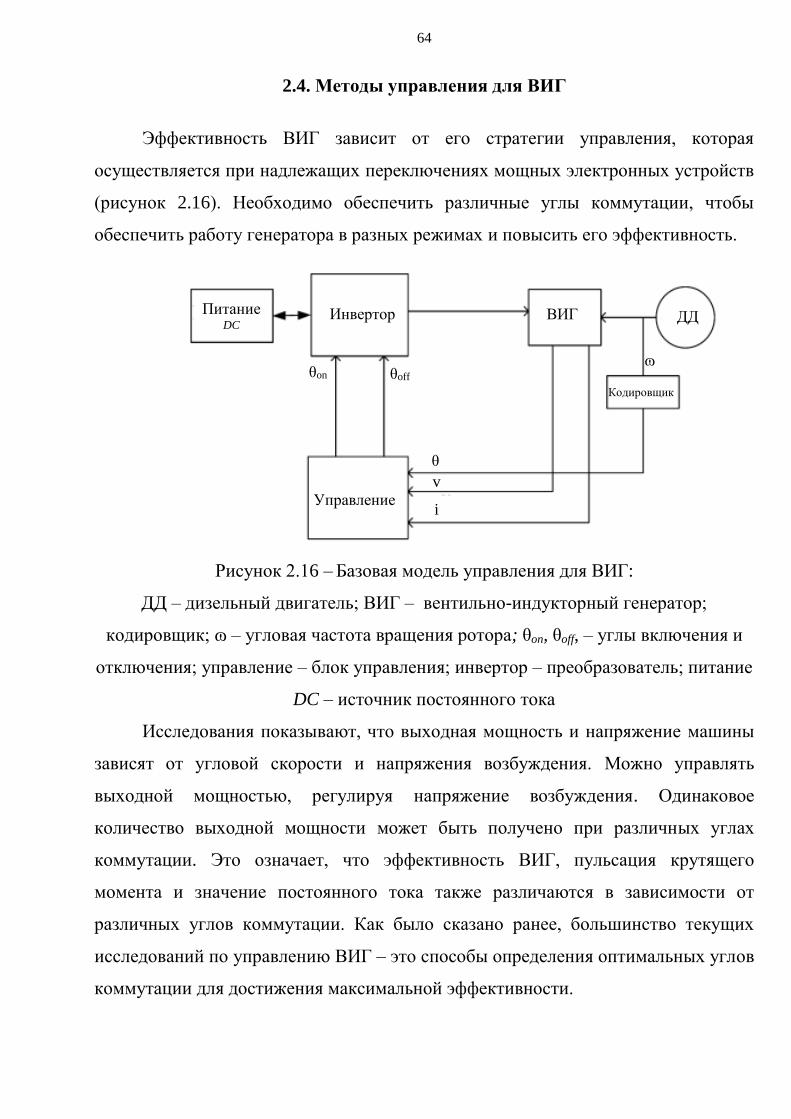
64
2.4. Методы управления для ВИГ
Эффективность ВИГ зависит от его стратегии управления, которая
осуществляется при надлежащих переключениях мощных электронных устройств
(рисунок 2.16). Необходимо обеспечить различные углы коммутации, чтобы
обеспечить работу генератора в разных режимах и повысить его эффективность.
Рисунок 2.16 – Базовая модель управления для ВИГ:
ДД – дизельный двигатель; ВИГ – вентильно-индукторный генератор;
кодировщик; ɷ – угловая частота вращения ротора; θon, θoff, – углы включения и
отключения; управление – блок управления; инвертор – преобразователь; питание
DC – источник постоянного тока
Исследования показывают, что выходная мощность и напряжение машины
зависят от угловой скорости и напряжения возбуждения. Можно управлять
выходной мощностью, регулируя напряжение возбуждения. Одинаковое
количество выходной мощности может быть получено при различных углах
коммутации. Это означает, что эффективность ВИГ, пульсация крутящего
момента и значение постоянного тока также различаются в зависимости от
различных углов коммутации. Как было сказано ранее, большинство текущих
исследований по управлению ВИГ – это способы определения оптимальных углов
коммутации для достижения максимальной эффективности.
ДД Инвертор Питание DC
ВИГ
Управление
Кодировщик
ɷ
θ
i
v
θon θoff
65
В режиме генерации одноимпульсная работа является обычной как для
низкой, так и для высокой скорости. Разница заключается в применяемых
стратегиях управления.
Варианты управления ВИГ, основанный на определении углов коммутации
можно разделить на три группы:
фиксация углов включения и отключения;
изменение угла включения или угла отключения;
изменение угла включения и угла отключения.
2.5. Разработка ВИГ для автономного зарядно - разрядного
электротехнического комплекса
В настоящее время вентильно-индукторный электропривод (ВИП) является
перспективным [49] для применения в электротехнических комплексах во многих
отраслях промышленности. Вопросы по проектированию ВИП в разных
диапазонах мощности достаточно освещены в работах, рассмотрены вопросы
испытания ВИП способом взаимного нагружения одинаковых машин, в том числе
рассмотрен генераторный режим машины, которая выступает в качестве
нагрузочного устройства. Однако в технической литературе не достаточно
освещены вопросы по применению ВИГ в автономных электротехнических
комплексах [31-34].
В предложенном автономном зарядно - разрядном электротехническом
комплексе АЗР ЭТК [1] обеспечивается его автономность и эксплуатация в
условиях широкого диапазона значений влажности и температуры окружающей
среды, и тем самым расширены функциональные возможности, при достижении
максимально возможной экономии энергии, затрачиваемой в процессе
неоднократных циклов заряда-разряда АБ [34], за счет использования дизель-
генератора для заряда регулируемым постоянным током. АЗРЭТК обладает
весьма широкими функциональными возможностями, обеспечивая АБ
66
реверсивным регулируемым постоянным током при проведении формовочных
циклов заряда-разряда [6, 34].
Данное исследование посвящено рассмотрению и выбору возможного
варианта реализации ВИГ для АЗР ЭТК в комплексе с дизельным двигателем.
Значение номинальной мощности АЗР ЭТК дизельного двигателя совпадает с
мощностью дизеля Cummins КТА50-С при n = 1900 об/мин. Мощность для
режимов максимального крутящего момента Mгmax = 6292 Нм при n = 1500
об/мин стационарных дизельных генераторных (ДГ) ЭТК серии КТА50-С
составляет 1005 … 1340 кВт при заданной частоте вращения 1500 об/мин [34].
Далее рассмотрены возможные варианты питания ВИГ:
- с управляемым инвертором на выходе (два способа регулирования);
- со специальной схемой соединения обмоток и с источником
регулируемого возбуждения и неуправляемым выпрямителем на выходе.
Первый из них можно назвать современным, а второй – традиционным.
Принципиальная возможность последнего варианта экспериментально
подтверждена примере пятифазной индукторной машины (ВИГ с совмещёнными
обмотками якоря и возбуждения) [32, 34]. Однако применение этого варианта
требует детального анализа его регулировочных характеристик, оценки
предельных возможностей и энергетических показателей. В определенных
условиях второй вариант может рассматриваться как резервный при отказе
транзисторов или их системы управления первого варианта.
Условия выбора вариантов конфигурации магнитной системы ВИГ
аналогичны для привода [32]: минимальное число фаз и соединительных
проводников в силовой части между генератором и инвертором; многополюсный
вариант распределения магнитного поля фазы для более равномерного
распределения электромагнитных сил по окружности воздушного зазора;
конфигурация силовой части инвертора с минимальным числом модулей силовых ключей.
На начальном этапе ограничимся рассмотрением одного варианта
двухпакетной конструкции с конфигурацией зубцов магнитной системы Zs/Zr =
18/12. Условимся этот вариант именовать ВИГ-2х550 [34]. Для питания обмоток
фаз двухпакетной конструкции ВИГ используется один управляемый инвертор,
что приводит к двукратному уменьшению числа транзисторов и возможности
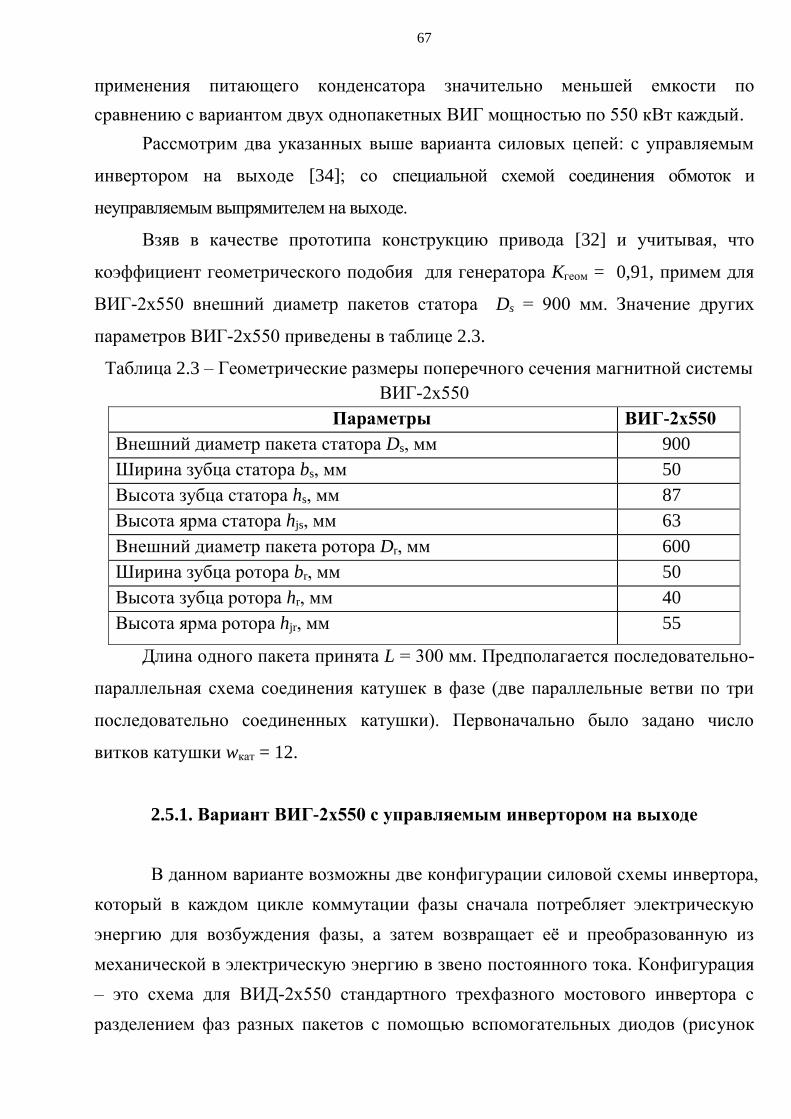
67
применения питающего конденсатора значительно меньшей емкости по
сравнению с вариантом двух однопакетных ВИГ мощностью по 550 кВт каждый.
Рассмотрим два указанных выше варианта силовых цепей: с управляемым
инвертором на выходе [34]; со специальной схемой соединения обмоток и
неуправляемым выпрямителем на выходе.
Взяв в качестве прототипа конструкцию привода [32] и учитывая, что
коэффициент геометрического подобия для генератора Kгеом = 0,91, примем для
ВИГ-2х550 внешний диаметр пакетов статора Ds = 900 мм. Значение других
параметров ВИГ-2x550 приведены в таблице 2.3.
Таблица 2.3 – Геометрические размеры поперечного сечения магнитной системы
ВИГ-2х550
Параметры ВИГ-2х550
Внешний диаметр пакета статора Ds, мм 900
Ширина зубца статора bs, мм 50
Высота зубца статора hs, мм 87
Высота ярма статора hjs, мм 63
Внешний диаметр пакета ротора Dr, мм 600
Ширина зубца ротора br, мм 50
Высота зубца ротора hr, мм 40
Высота ярма ротора hjr, мм 55
Длина одного пакета принята L = 300 мм. Предполагается последовательно-
параллельная схема соединения катушек в фазе (две параллельные ветви по три
последовательно соединенных катушки). Первоначально было задано число
витков катушки wкат = 12.
2.5.1. Вариант ВИГ-2х550 с управляемым инвертором на выходе
В данном варианте возможны две конфигурации силовой схемы инвертора,
который в каждом цикле коммутации фазы сначала потребляет электрическую
энергию для возбуждения фазы, а затем возвращает её и преобразованную из
механической в электрическую энергию в звено постоянного тока. Конфигурация
– это схема для ВИД-2х550 стандартного трехфазного мостового инвертора с
разделением фаз разных пакетов с помощью вспомогательных диодов (рисунок
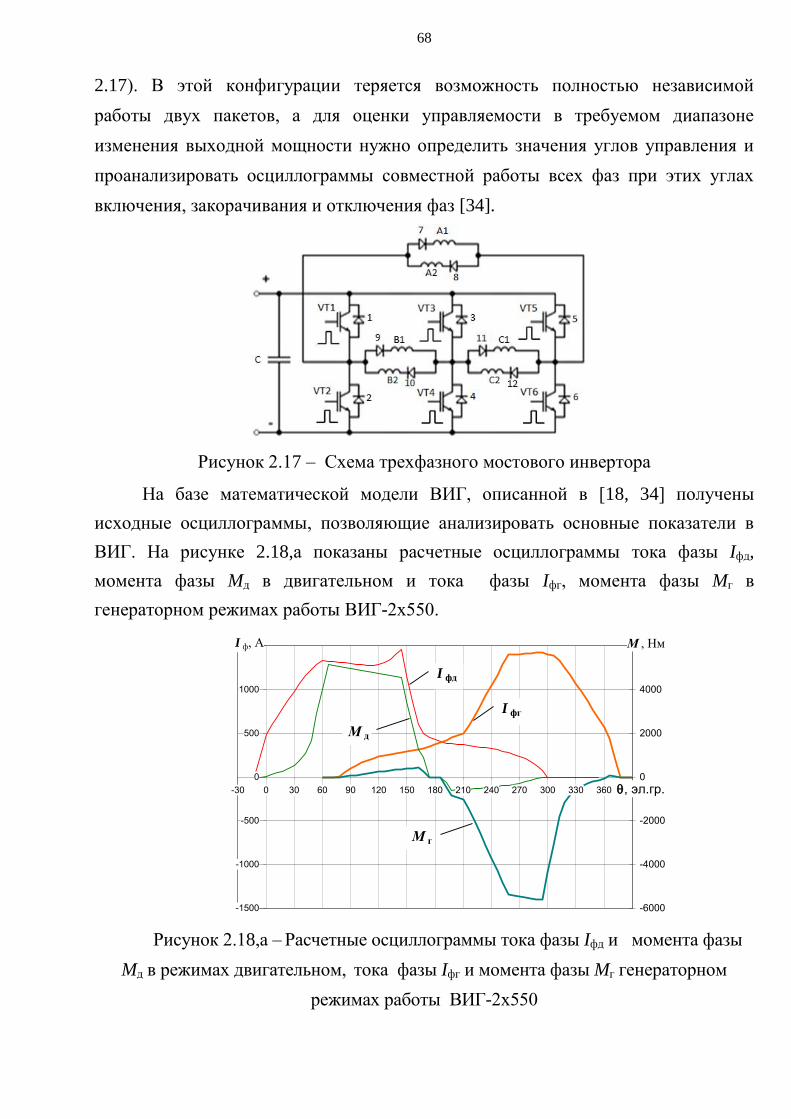
68
2.17). В этой конфигурации теряется возможность полностью независимой
работы двух пакетов, а для оценки управляемости в требуемом диапазоне
изменения выходной мощности нужно определить значения углов управления и
проанализировать осциллограммы совместной работы всех фаз при этих углах
включения, закорачивания и отключения фаз [34].
Рисунок 2.17 – Схема трехфазного мостового инвертора
На базе математической модели ВИГ, описанной в [18, 34] получены
исходные осциллограммы, позволяющие анализировать основные показатели в
ВИГ. На рисунке 2.18,а показаны расчетные осциллограммы тока фазы Iфд,
момента фазы Mд в двигательном и тока фазы Iфг, момента фазы Mг в
генераторном режимах работы ВИГ-2х550.
Рисунок 2.18,а – Расчетные осциллограммы тока фазы Iфд и момента фазы
Mд в режимах двигательном, тока фазы Iфг и момента фазы Mг генераторном
режимах работы ВИГ-2х550
-1500
-1000
-500
0
500
1000
1500
-30 0 30 60 90 120 150 180 210 240 270 300 330 360 390, эл.гр.
I ф, А
-6000
-4000
-2000
0
2000
4000
6000М , Нм
I фг
М г
М д
I фд
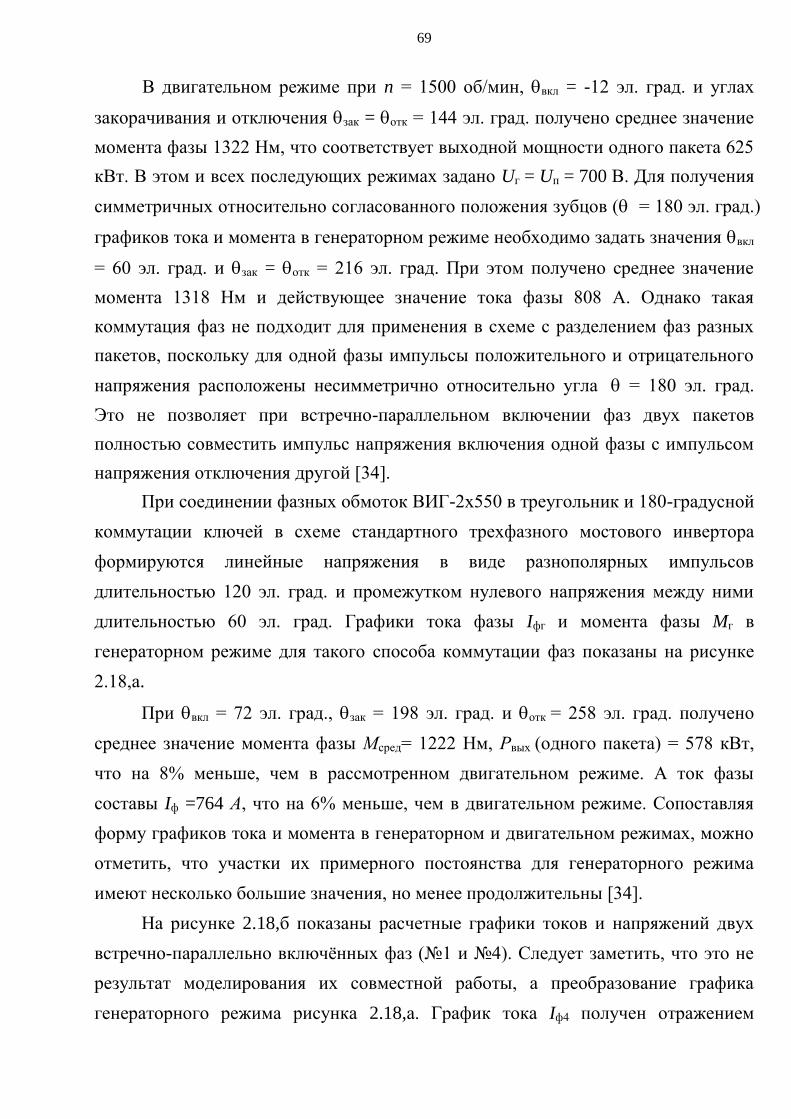
69
В двигательном режиме при n = 1500 об/мин, вкл = -12 эл. град. и углах
закорачивания и отключения зак = отк = 144 эл. град. получено среднее значение
момента фазы 1322 Нм, что соответствует выходной мощности одного пакета 625
кВт. В этом и всех последующих режимах задано Uг = Uп = 700 В. Для получения
симметричных относительно согласованного положения зубцов ( = 180 эл. град.)
графиков тока и момента в генераторном режиме необходимо задать значения вкл
= 60 эл. град. и зак = отк = 216 эл. град. При этом получено среднее значение
момента 1318 Нм и действующее значение тока фазы 808 А. Однако такая
коммутация фаз не подходит для применения в схеме с разделением фаз разных
пакетов, поскольку для одной фазы импульсы положительного и отрицательного
напряжения расположены несимметрично относительно угла = 180 эл. град.
Это не позволяет при встречно-параллельном включении фаз двух пакетов
полностью совместить импульс напряжения включения одной фазы с импульсом
напряжения отключения другой [34].
При соединении фазных обмоток ВИГ-2х550 в треугольник и 180-градусной
коммутации ключей в схеме стандартного трехфазного мостового инвертора
формируются линейные напряжения в виде разнополярных импульсов
длительностью 120 эл. град. и промежутком нулевого напряжения между ними
длительностью 60 эл. град. Графики тока фазы Iфг и момента фазы Mг в
генераторном режиме для такого способа коммутации фаз показаны на рисунке
2.18,а.
При вкл = 72 эл. град., зак = 198 эл. град. и отк = 258 эл. град. получено
среднее значение момента фазы Мсред= 1222 Нм, Рвых (одного пакета) = 578 кВт,
что на 8% меньше, чем в рассмотренном двигательном режиме. А ток фазы
составы Iф =764 А, что на 6% меньше, чем в двигательном режиме. Сопоставляя
форму графиков тока и момента в генераторном и двигательном режимах, можно
отметить, что участки их примерного постоянства для генераторного режима
имеют несколько большие значения, но менее продолжительны [34].
На рисунке 2.18,б показаны расчетные графики токов и напряжений двух
встречно-параллельно включённых фаз (№1 и №4). Следует заметить, что это не
результат моделирования их совместной работы, а преобразование графика
генераторного режима рисунка 2.18,а. График тока Iф4 получен отражением
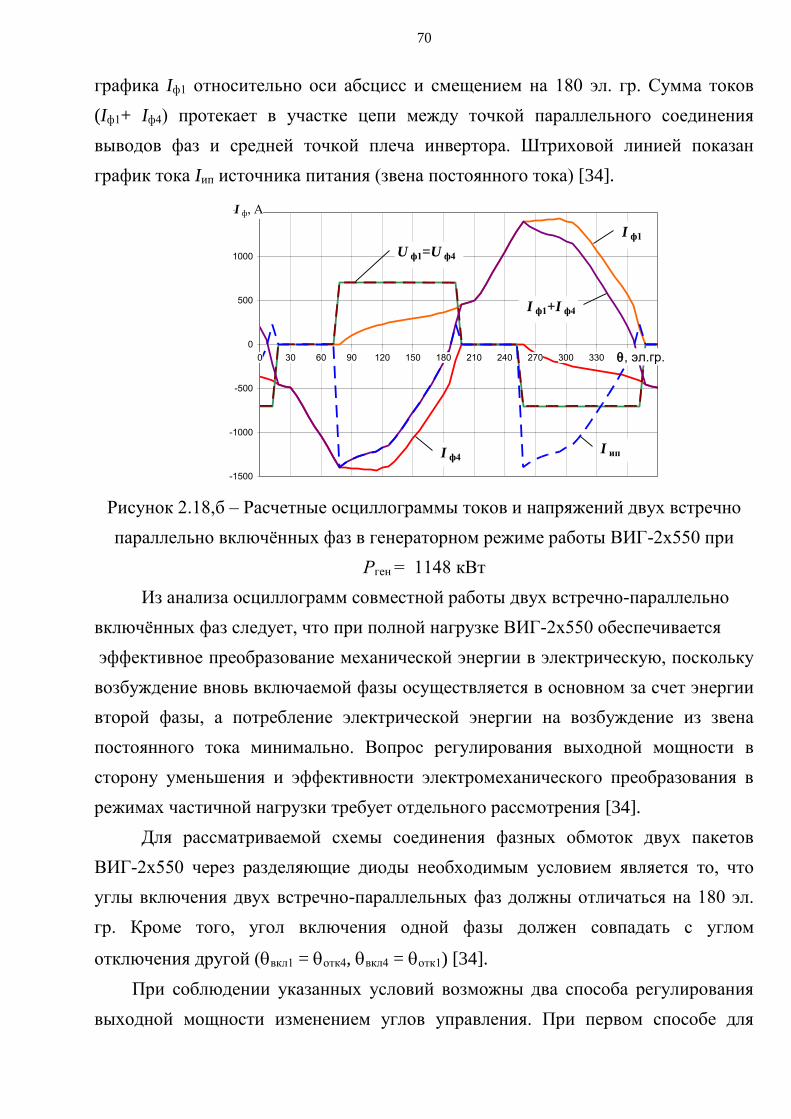
70
графика Iф1 относительно оси абсцисс и смещением на 180 эл. гр. Сумма токов
(Iф1+ Iф4) протекает в участке цепи между точкой параллельного соединения
выводов фаз и средней точкой плеча инвертора. Штриховой линией показан
график тока Iип источника питания (звена постоянного тока) [34].
Рисунок 2.18,б – Расчетные осциллограммы токов и напряжений двух встречно
параллельно включённых фаз в генераторном режиме работы ВИГ-2х550 при
Рген = 1148 кВт
Из анализа осциллограмм совместной работы двух встречно-параллельно
включённых фаз следует, что при полной нагрузке ВИГ-2х550 обеспечивается
эффективное преобразование механической энергии в электрическую, поскольку
возбуждение вновь включаемой фазы осуществляется в основном за счет энергии
второй фазы, а потребление электрической энергии на возбуждение из звена
постоянного тока минимально. Вопрос регулирования выходной мощности в
сторону уменьшения и эффективности электромеханического преобразования в
режимах частичной нагрузки требует отдельного рассмотрения [34].
Для рассматриваемой схемы соединения фазных обмоток двух пакетов
ВИГ-2х550 через разделяющие диоды необходимым условием является то, что
углы включения двух встречно-параллельных фаз должны отличаться на 180 эл.
гр. Кроме того, угол включения одной фазы должен совпадать с углом
отключения другой (вкл1 = отк4, вкл4 = отк1) [34].
При соблюдении указанных условий возможны два способа регулирования
выходной мощности изменением углов управления. При первом способе для
-1500
-1000
-500
0
500
1000
1500
0 30 60 90 120 150 180 210 240 270 300 330 360 390, эл.гр.
I ф, А
I ф1
I ф4
U ф1=U ф4
I ф1+I ф4
I ип
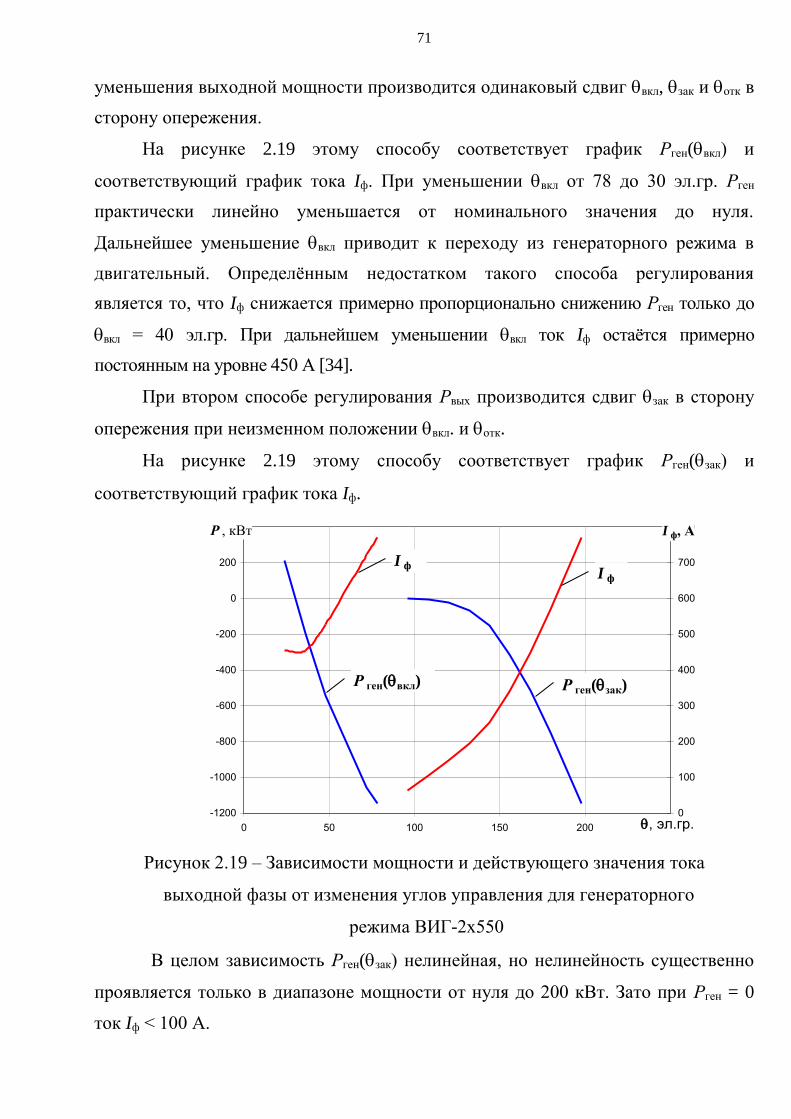
71
уменьшения выходной мощности производится одинаковый сдвиг вкл, зак и отк в
сторону опережения.
На рисунке 2.19 этому способу соответствует график Рген(вкл) и
соответствующий график тока Iф. При уменьшении вкл от 78 до 30 эл.гр. Рген
практически линейно уменьшается от номинального значения до нуля.
Дальнейшее уменьшение вкл приводит к переходу из генераторного режима в
двигательный. Определённым недостатком такого способа регулирования
является то, что Iф снижается примерно пропорционально снижению Рген только до
вкл = 40 эл.гр. При дальнейшем уменьшении вкл ток Iф остаётся примерно
постоянным на уровне 450 А [34].
При втором способе регулирования Рвых производится сдвиг зак в сторону
опережения при неизменном положении вкл. и отк.
На рисунке 2.19 этому способу соответствует график Рген(зак) и
соответствующий график тока Iф.
Рисунок 2.19 – Зависимости мощности и действующего значения тока
выходной фазы от изменения углов управления для генераторного
режима ВИГ-2х550
В целом зависимость Рген(зак) нелинейная, но нелинейность существенно
проявляется только в диапазоне мощности от нуля до 200 кВт. Зато при Рген = 0
ток Iф < 100 А.
-1200
-1000
-800
-600
-400
-200
0
200
400
0 50 100 150 200 250, эл.гр.
Р , кВт
0
100
200
300
400
500
600
700
800I ф, А
Р ген(вкл)
I ф
I ф
Р ген(зак)
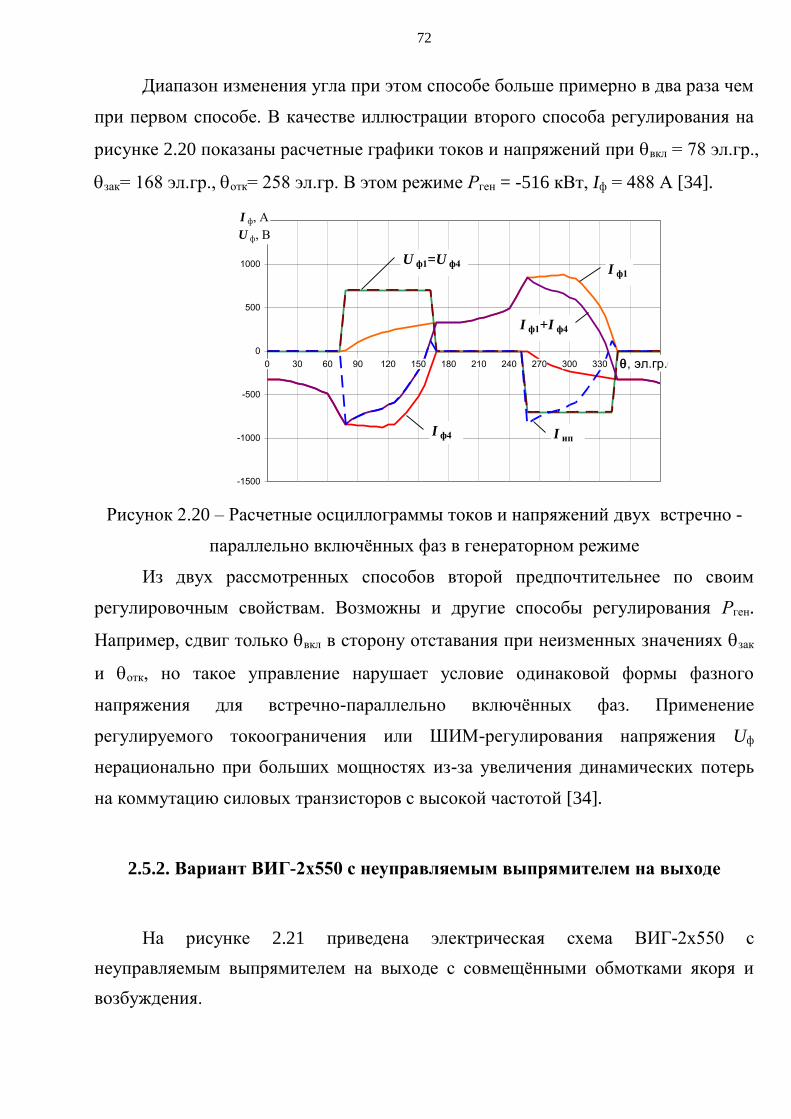
72
Диапазон изменения угла при этом способе больше примерно в два раза чем
при первом способе. В качестве иллюстрации второго способа регулирования на
рисунке 2.20 показаны расчетные графики токов и напряжений при вкл = 78 эл.гр.,
зак= 168 эл.гр., отк= 258 эл.гр. В этом режиме Рген = -516 кВт, Iф = 488 А [34].
Рисунок 2.20 – Расчетные осциллограммы токов и напряжений двух встречно -
параллельно включённых фаз в генераторном режиме
Из двух рассмотренных способов второй предпочтительнее по своим
регулировочным свойствам. Возможны и другие способы регулирования Рген.
Например, сдвиг только вкл в сторону отставания при неизменных значениях зак
и отк, но такое управление нарушает условие одинаковой формы фазного
напряжения для встречно-параллельно включённых фаз. Применение
регулируемого токоограничения или ШИМ-регулирования напряжения Uф
нерационально при больших мощностях из-за увеличения динамических потерь
на коммутацию силовых транзисторов с высокой частотой [34].
2.5.2. Вариант ВИГ-2х550 с неуправляемым выпрямителем на выходе
На рисунке 2.21 приведена электрическая схема ВИГ-2х550 с
неуправляемым выпрямителем на выходе с совмещёнными обмотками якоря и
возбуждения.
-1500
-1000
-500
0
500
1000
1500
0 30 60 90 120 150 180 210 240 270 300 330 360 390, эл.гр.
I ф, А
U ф, В
I ф1
I ф4
U ф1=U ф4
I ф1+I ф4
I ип
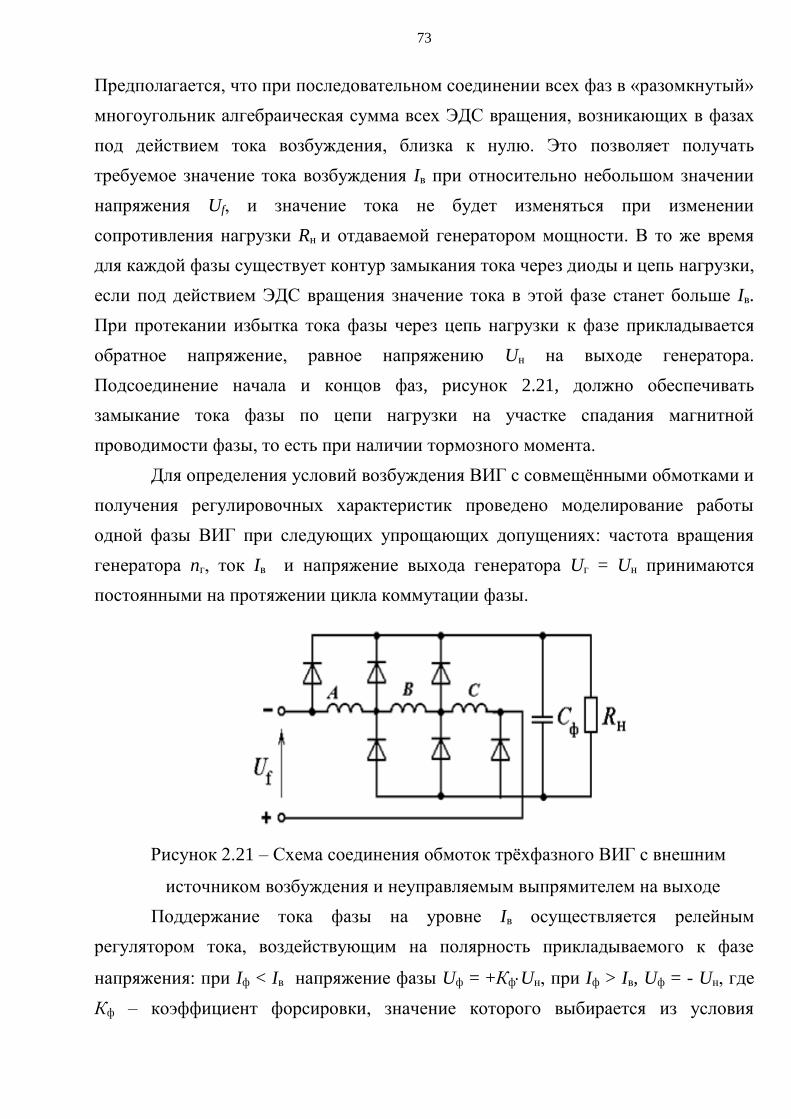
73
Предполагается, что при последовательном соединении всех фаз в «разомкнутый»
многоугольник алгебраическая сумма всех ЭДС вращения, возникающих в фазах
под действием тока возбуждения, близка к нулю. Это позволяет получать
требуемое значение тока возбуждения Iв при относительно небольшом значении
напряжения Uf, и значение тока не будет изменяться при изменении
сопротивления нагрузки Rн и отдаваемой генератором мощности. В то же время
для каждой фазы существует контур замыкания тока через диоды и цепь нагрузки,
если под действием ЭДС вращения значение тока в этой фазе станет больше Iв.
При протекании избытка тока фазы через цепь нагрузки к фазе прикладывается
обратное напряжение, равное напряжению Uн на выходе генератора.
Подсоединение начала и концов фаз, рисунок 2.21, должно обеспечивать
замыкание тока фазы по цепи нагрузки на участке спадания магнитной
проводимости фазы, то есть при наличии тормозного момента.
Для определения условий возбуждения ВИГ с совмещёнными обмотками и
получения регулировочных характеристик проведено моделирование работы
одной фазы ВИГ при следующих упрощающих допущениях: частота вращения
генератора nг, ток Iв и напряжение выхода генератора Uг = Uн принимаются
постоянными на протяжении цикла коммутации фазы.
Рисунок 2.21 – Схема соединения обмоток трёхфазного ВИГ с внешним
источником возбуждения и неуправляемым выпрямителем на выходе
Поддержание тока фазы на уровне Iв осуществляется релейным
регулятором тока, воздействующим на полярность прикладываемого к фазе
напряжения: при Iф < Iв напряжение фазы Uф = +КфUн, при Iф > Iв, Uф = - Uн, где
Кф – коэффициент форсировки, значение которого выбирается из условия
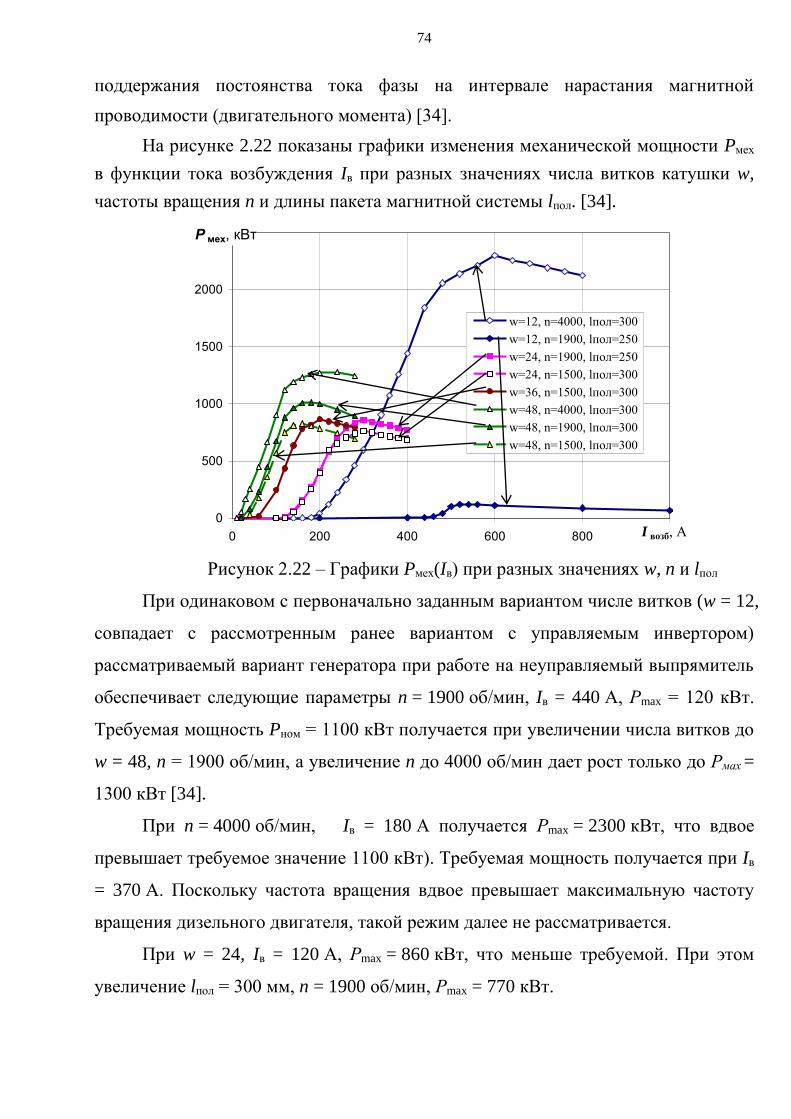
74
поддержания постоянства тока фазы на интервале нарастания магнитной
проводимости (двигательного момента) [34].
На рисунке 2.22 показаны графики изменения механической мощности Pмех
в функции тока возбуждения Iв при разных значениях числа витков катушки w,
частоты вращения n и длины пакета магнитной системы lпол. [34].
Рисунок 2.22 – Графики Pмех(Iв) при разных значениях w, n и lпол
При одинаковом с первоначально заданным вариантом числе витков (w = 12,
совпадает с рассмотренным ранее вариантом с управляемым инвертором)
рассматриваемый вариант генератора при работе на неуправляемый выпрямитель
обеспечивает следующие параметры n = 1900 об/мин, Iв = 440 А, Рmax = 120 кВт.
Требуемая мощность Pном = 1100 кВт получается при увеличении числа витков до
w = 48, n = 1900 об/мин, а увеличение n до 4000 об/мин дает рост только до Рмах =
1300 кВт [34].
При n = 4000 об/мин, Iв = 180 А получается Рmax = 2300 кВт, что вдвое
превышает требуемое значение 1100 кВт). Требуемая мощность получается при Iв
= 370 А. Поскольку частота вращения вдвое превышает максимальную частоту
вращения дизельного двигателя, такой режим далее не рассматривается.
При w = 24, Iв = 120 А, Рmax = 860 кВт, что меньше требуемой. При этом
увеличение lпол = 300 мм, n = 1900 об/мин, Рmax = 770 кВт.
0
500
1000
1500
2000
2500
0 200 400 600 800 1000I возб, А
P мех, кВт
w=12, n=4000, lпол=300
w=12, n=1900, lпол=250
w=24, n=1900, lпол=250
w=24, n=1500, lпол=300
w=36, n=1500, lпол=300
w=48, n=4000, lпол=300
w=48, n=1900, lпол=300
w=48, n=1500, lпол=300
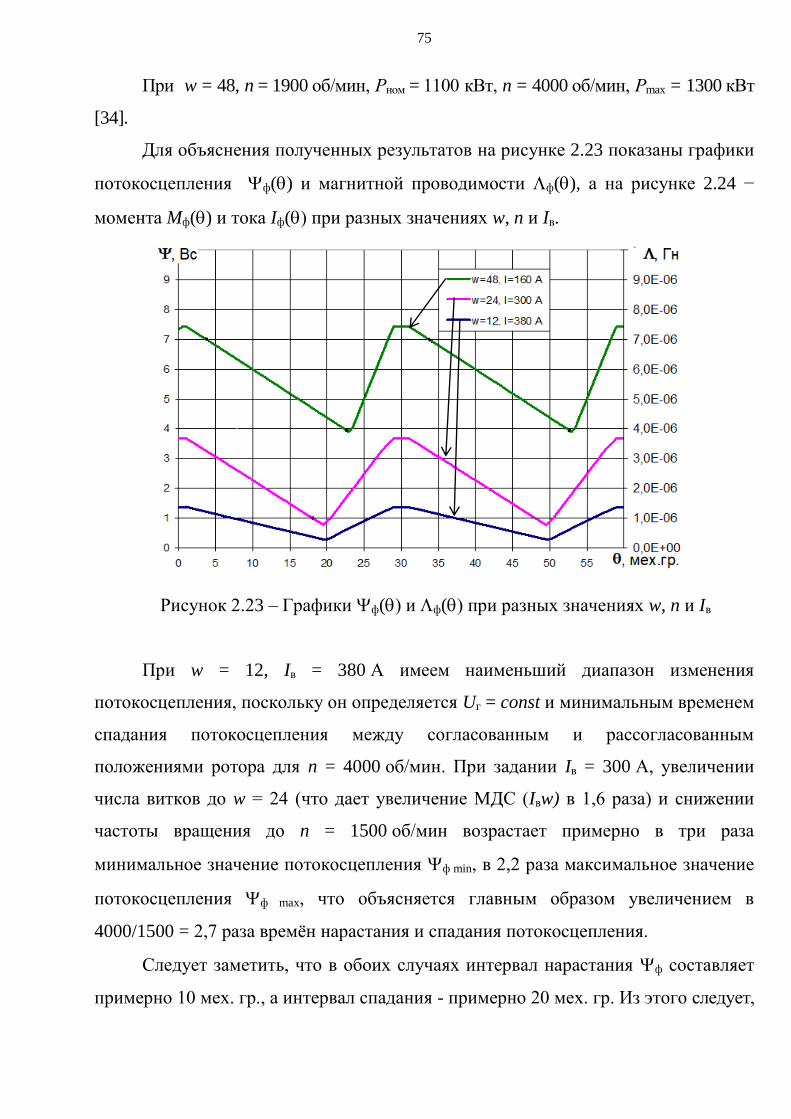
75
При w = 48, n = 1900 об/мин, Рном = 1100 кВт, n = 4000 об/мин, Рmax = 1300 кВт
[34].
Для объяснения полученных результатов на рисунке 2.23 показаны графики
потокосцепления ф() и магнитной проводимости ф(), а на рисунке 2.24 −
момента Mф() и тока Iф() при разных значениях w, n и Iв.
Рисунок 2.23 – Графики ф() и ф() при разных значениях w, n и Iв
При w = 12, Iв = 380 А имеем наименьший диапазон изменения
потокосцепления, поскольку он определяется Uг = const и минимальным временем
спадания потокосцепления между согласованным и рассогласованным
положениями ротора для n = 4000 об/мин. При задании Iв = 300 А, увеличении
числа витков до w = 24 (что дает увеличение МДС (Iвw) в 1,6 раза) и снижении
частоты вращения до n = 1500 об/мин возрастает примерно в три раза
минимальное значение потокосцепления ф min, в 2,2 раза максимальное значение
потокосцепления ф max, что объясняется главным образом увеличением в
4000/1500 = 2,7 раза времён нарастания и спадания потокосцепления.
Следует заметить, что в обоих случаях интервал нарастания ф составляет
примерно 10 мех. гр., а интервал спадания - примерно 20 мех. гр. Из этого следует,
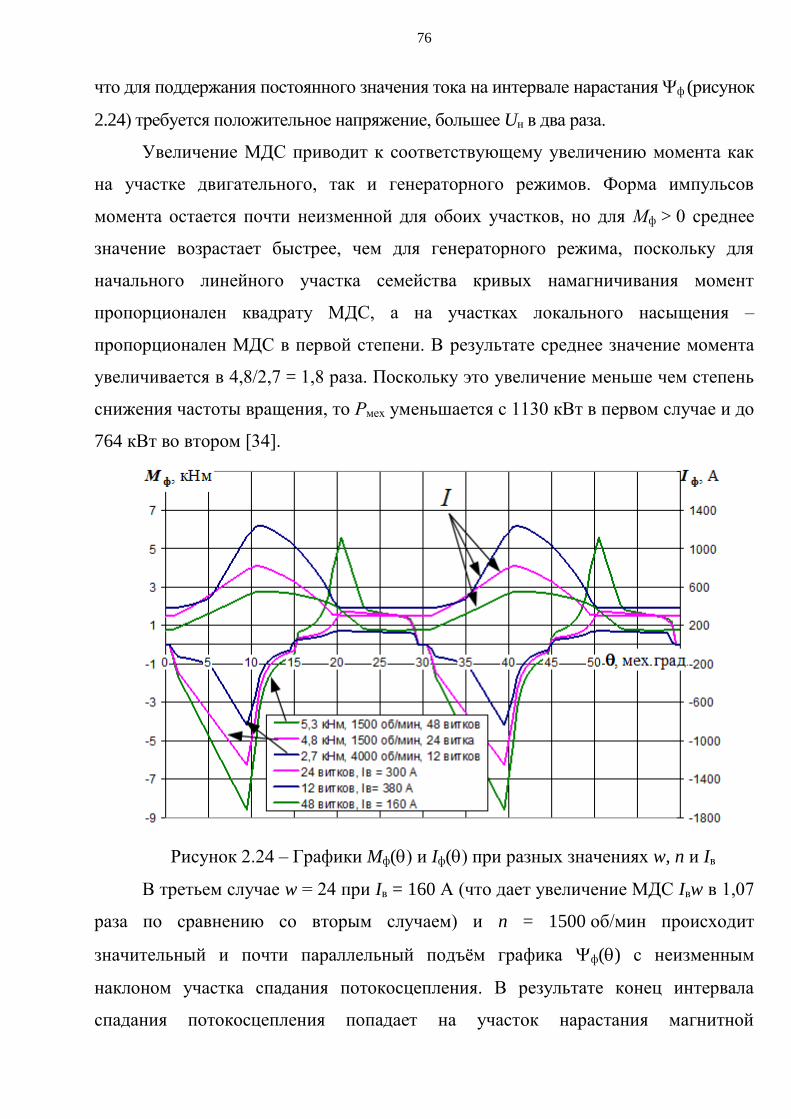
76
что для поддержания постоянного значения тока на интервале нарастания ф (рисунок
2.24) требуется положительное напряжение, большее Uн в два раза.
Увеличение МДС приводит к соответствующему увеличению момента как
на участке двигательного, так и генераторного режимов. Форма импульсов
момента остается почти неизменной для обоих участков, но для Мф > 0 среднее
значение возрастает быстрее, чем для генераторного режима, поскольку для
начального линейного участка семейства кривых намагничивания момент
пропорционален квадрату МДС, а на участках локального насыщения –
пропорционален МДС в первой степени. В результате среднее значение момента
увеличивается в 4,8/2,7 = 1,8 раза. Поскольку это увеличение меньше чем степень
снижения частоты вращения, то Рмех уменьшается с 1130 кВт в первом случае и до
764 кВт во втором [34].
Рисунок 2.24 – Графики Mф() и Iф() при разных значениях w, n и Iв
В третьем случае w = 24 при Iв = 160 А (что дает увеличение МДС Iвw в 1,07
раза по сравнению со вторым случаем) и n = 1500 об/мин происходит
значительный и почти параллельный подъём графика ф() с неизменным
наклоном участка спадания потокосцепления. В результате конец интервала
спадания потокосцепления попадает на участок нарастания магнитной
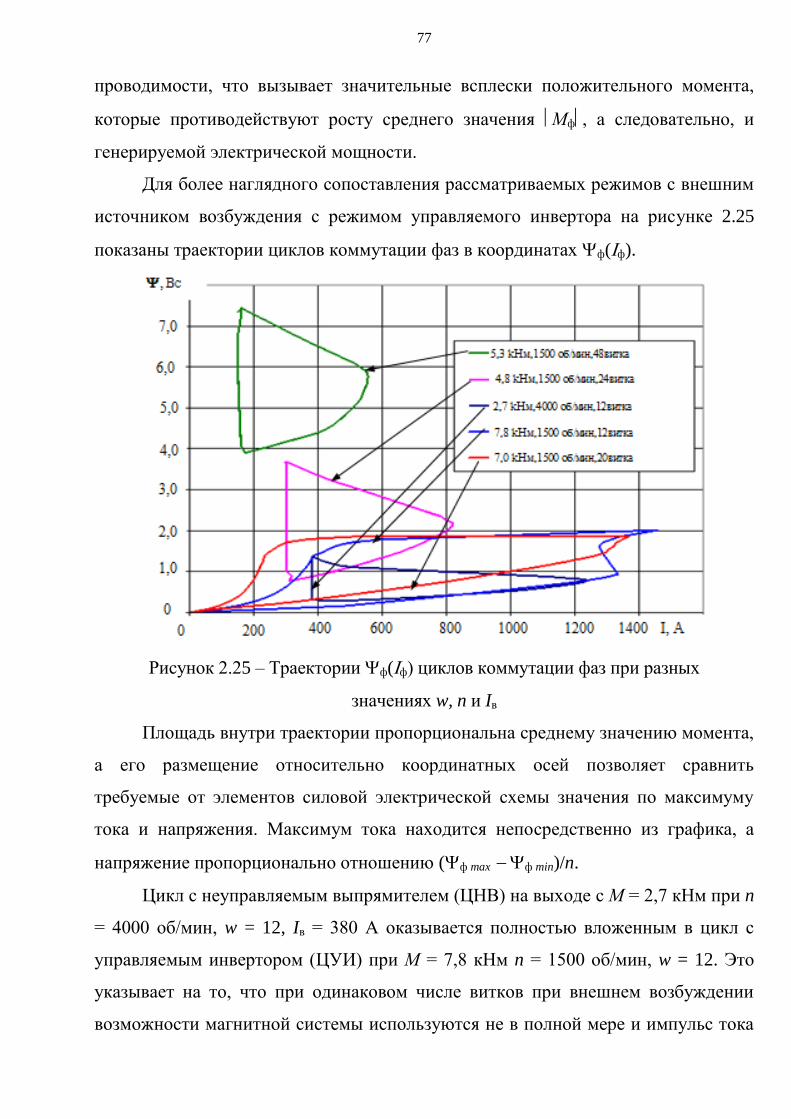
77
проводимости, что вызывает значительные всплески положительного момента,
которые противодействуют росту среднего значения Мф, а следовательно, и
генерируемой электрической мощности.
Для более наглядного сопоставления рассматриваемых режимов с внешним
источником возбуждения с режимом управляемого инвертора на рисунке 2.25
показаны траектории циклов коммутации фаз в координатах ф(ф).
Рисунок 2.25 – Траектории ф(ф) циклов коммутации фаз при разных
значениях w, n и Iв
Площадь внутри траектории пропорциональна среднему значению момента,
а его размещение относительно координатных осей позволяет сравнить
требуемые от элементов силовой электрической схемы значения по максимуму
тока и напряжения. Максимум тока находится непосредственно из графика, а
напряжение пропорционально отношению (ф max ф min)/n.
Цикл с неуправляемым выпрямителем (ЦНВ) на выходе с М = 2,7 кНм при n
= 4000 об/мин, w = 12, Iв = 380 А оказывается полностью вложенным в цикл с
управляемым инвертором (ЦУИ) при М = 7,8 кНм n = 1500 об/мин, w = 12. Это
указывает на то, что при одинаковом числе витков при внешнем возбуждении
возможности магнитной системы используются не в полной мере и импульс тока
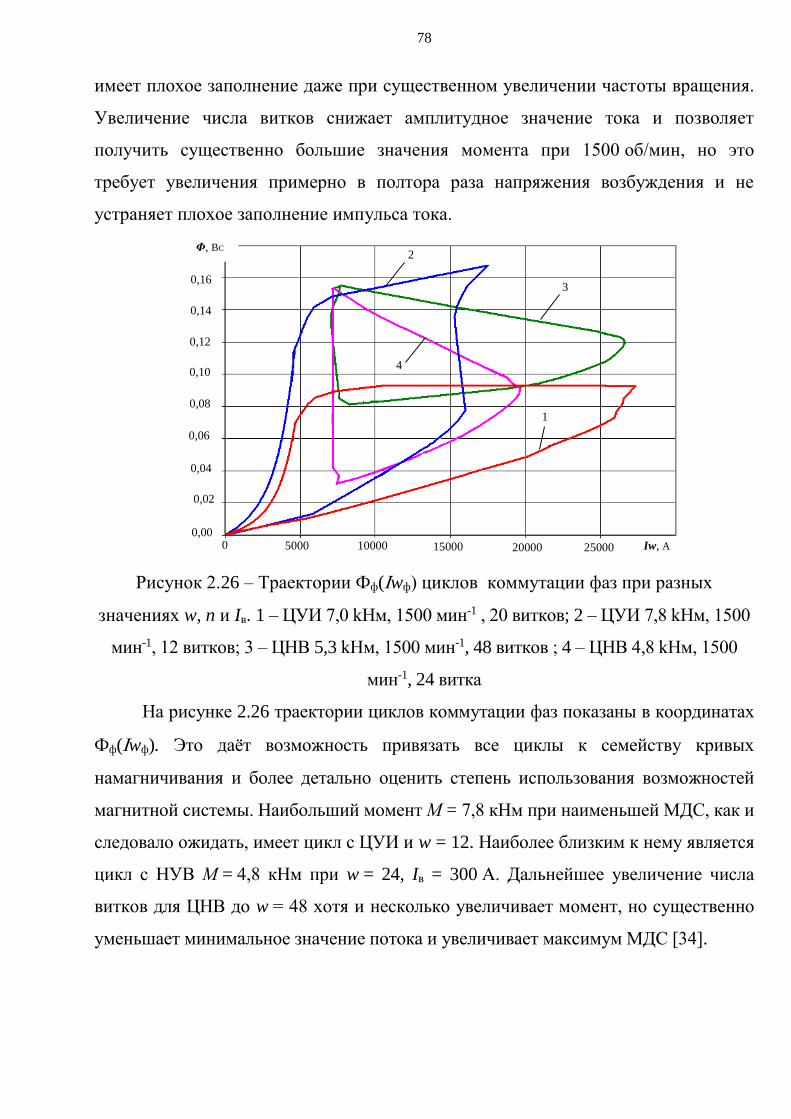
78
имеет плохое заполнение даже при существенном увеличении частоты вращения.
Увеличение числа витков снижает амплитудное значение тока и позволяет
получить существенно большие значения момента при 1500 об/мин, но это
требует увеличения примерно в полтора раза напряжения возбуждения и не
устраняет плохое заполнение импульса тока.
Рисунок 2.26 – Траектории Фф(wф) циклов коммутации фаз при разных
значениях w, n и Iв. 1 – ЦУИ 7,0 kHм, 1500 мин-1 , 20 витков; 2 – ЦУИ 7,8 kHм, 1500
мин-1, 12 витков; 3 – ЦНВ 5,3 kHм, 1500 мин-1, 48 витков ; 4 – ЦНВ 4,8 kHм, 1500
мин-1, 24 витка
На рисунке 2.26 траектории циклов коммутации фаз показаны в координатах
Фф(wф). Это даёт возможность привязать все циклы к семейству кривых
намагничивания и более детально оценить степень использования возможностей
магнитной системы. Наибольший момент М = 7,8 кНм при наименьшей МДС, как и
следовало ожидать, имеет цикл с ЦУИ и w = 12. Наиболее близким к нему является
цикл с НУВ М = 4,8 кНм при w = 24, Iв = 300 А. Дальнейшее увеличение числа
витков для ЦНВ до w = 48 хотя и несколько увеличивает момент, но существенно
уменьшает минимальное значение потока и увеличивает максимум МДС [34].
Φ, BC
Iw, A
0,16
0,14
0,12
0,10
0,08
0,06
0,04
0,02
0,00 0 5000 10000 15000 20000 25000
2
1
3
4
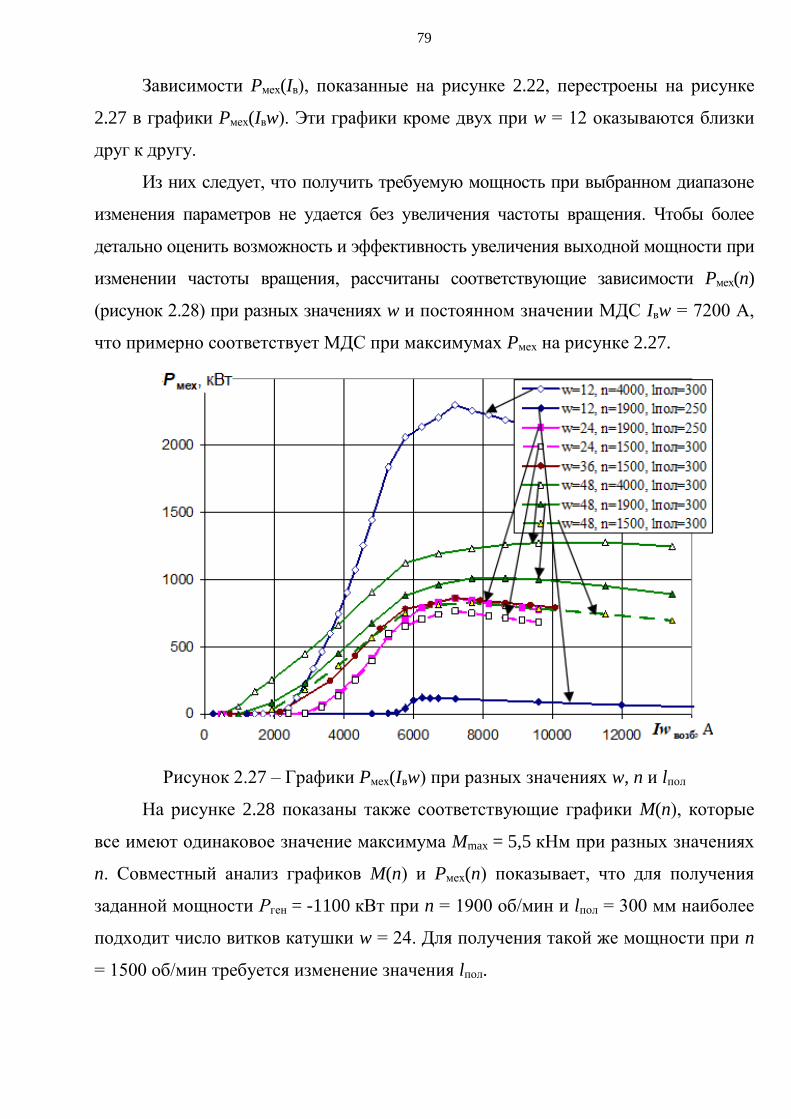
79
Зависимости Pмех(Iв), показанные на рисунке 2.22, перестроены на рисунке
2.27 в графики Pмех(Iвw). Эти графики кроме двух при w = 12 оказываются близки
друг к другу.
Из них следует, что получить требуемую мощность при выбранном диапазоне
изменения параметров не удается без увеличения частоты вращения. Чтобы более
детально оценить возможность и эффективность увеличения выходной мощности при
изменении частоты вращения, рассчитаны соответствующие зависимости Pмех(n)
(рисунок 2.28) при разных значениях w и постоянном значении МДС Iвw = 7200 А,
что примерно соответствует МДС при максимумах Pмех на рисунке 2.27.
Рисунок 2.27 – Графики Pмех(Iвw) при разных значениях w, n и lпол
На рисунке 2.28 показаны также соответствующие графики M(n), которые
все имеют одинаковое значение максимума Mmax = 5,5 кНм при разных значениях
n. Совместный анализ графиков M(n) и Pмех(n) показывает, что для получения
заданной мощности Рген = -1100 кВт при n = 1900 об/мин и lпол = 300 мм наиболее
подходит число витков катушки w = 24. Для получения такой же мощности при n
= 1500 об/мин требуется изменение значения lпол.
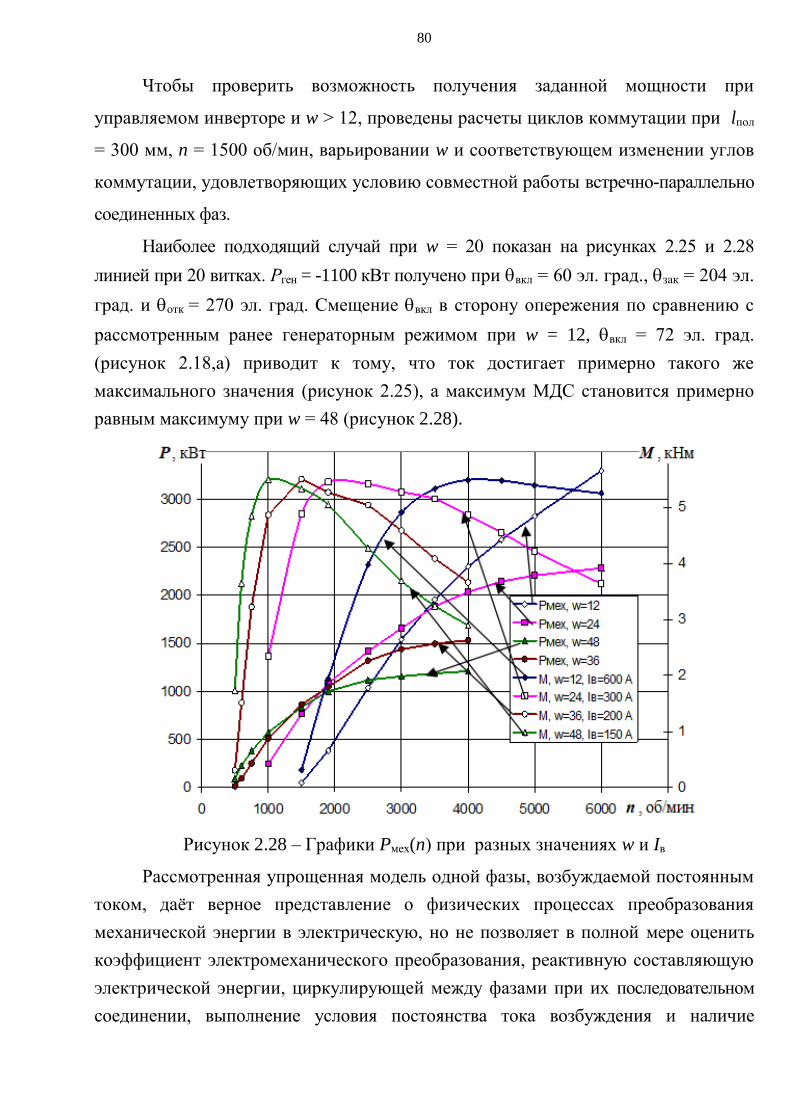
80
Чтобы проверить возможность получения заданной мощности при
управляемом инверторе и w > 12, проведены расчеты циклов коммутации при lпол
= 300 мм, n = 1500 об/мин, варьировании w и соответствующем изменении углов
коммутации, удовлетворяющих условию совместной работы встречно-параллельно
соединенных фаз.
Наиболее подходящий случай при w = 20 показан на рисунках 2.25 и 2.28
линией при 20 витках. Рген = -1100 кВт получено при вкл = 60 эл. град., зак = 204 эл.
град. и отк = 270 эл. град. Смещение вкл в сторону опережения по сравнению с
рассмотренным ранее генераторным режимом при w = 12, вкл = 72 эл. град.
(рисунок 2.18,а) приводит к тому, что ток достигает примерно такого же
максимального значения (рисунок 2.25), а максимум МДС становится примерно
равным максимуму при w = 48 (рисунок 2.28).
Рисунок 2.28 – Графики Pмех(n) при разных значениях w и Iв
Рассмотренная упрощенная модель одной фазы, возбуждаемой постоянным
током, даёт верное представление о физических процессах преобразования
механической энергии в электрическую, но не позволяет в полной мере оценить
коэффициент электромеханического преобразования, реактивную составляющую
электрической энергии, циркулирующей между фазами при их последовательном
соединении, выполнение условия постоянства тока возбуждения и наличие
81
необходимых форсировок в схеме с неуправляемым выпрямителем. Это можно
сделать только в полной модели соединения всех фаз с неуправляемым выпрямителем.
Сравнивая рассмотренные варианты, следует отметить, что наибольший
момент при наименьшей МДС, как и следовало ожидать, имеет цикл с
управляемым инвертором на рисунке 2.28 линией при 7,8 kHм, 1500 об/мин, 12
витках. Наиболее близким к нему является цикл с неуправляемым выпрямителем
при 4,8 кНм, 1500 об/мин, 24 витках на рисунке 2.28. Дальнейшее увеличение
числа витков до w = 48 (цикл 3) хотя и несколько увеличивает момент, но
существенно уменьшает минимальное значение потока и увеличивает максимум
МДС [34].
2.6. Моделирование системы дизельный двигатель – вентильно -
индукторный генератор (ДД ВИГ)
2.6.1. Математическая модель ДД ВИГ
Математическая модель системы ДД ВИГ включает в себя:
- математическую модель ДД, задаваемую уравнениями (1.13) и (1.14);
- математическую модель ВИГ, задаваемую уравнениями (2.1) - (2.4);
Рассматриваемая имитационная модель была реализована в среде Matlab и в
его приложении Simulink [18, 27, 80].
Модель ДД ВИГ показана на рисунке 2.29 [18].
Она состоит из следующих подсистем: подсистема ДДВИГ на рисунке
2.30,а, математическая модель подсистемы Invertor [7, 18] на рисунке 2.30,б.
Преобразование постоянного напряжения на входе в переменное
импульсное, которое подается на фазные обмотки генератора, осуществляется
инвертором напряжения, в основу которого положена полумостовая схема. В
данной Simulink-модели использованы управляемые IGBT-транзисторы.
Входными параметрами являются сигналы, поступающие от системы управления
на отпирание/запирание транзисторов.
Математические модели транзисторов и диодов заимствованы из
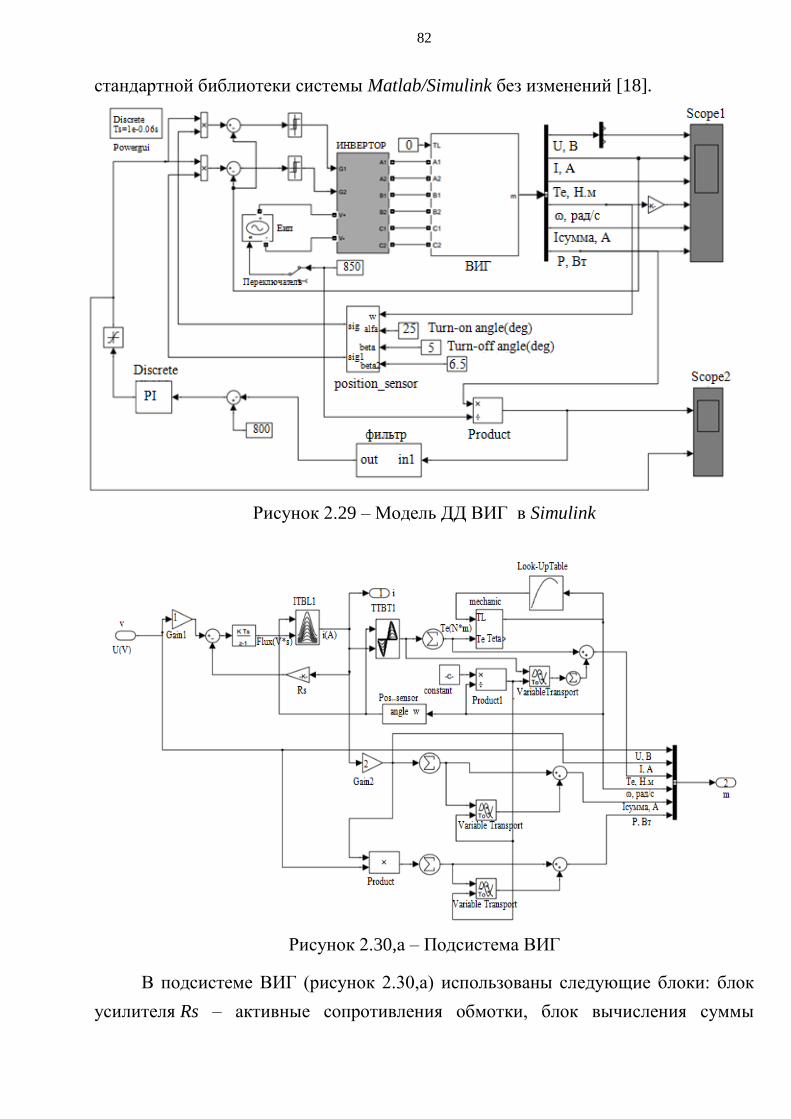
82
стандартной библиотеки системы Matlab/Simulink без изменений [18].
Рисунок 2.29 – Модель ДД ВИГ в Simulink
Рисунок 2.30,а – Подсистема ВИГ
В подсистеме ВИГ (рисунок 2.30,а) использованы следующие блоки: блок
усилителя Rs – активные сопротивления обмотки, блок вычисления суммы
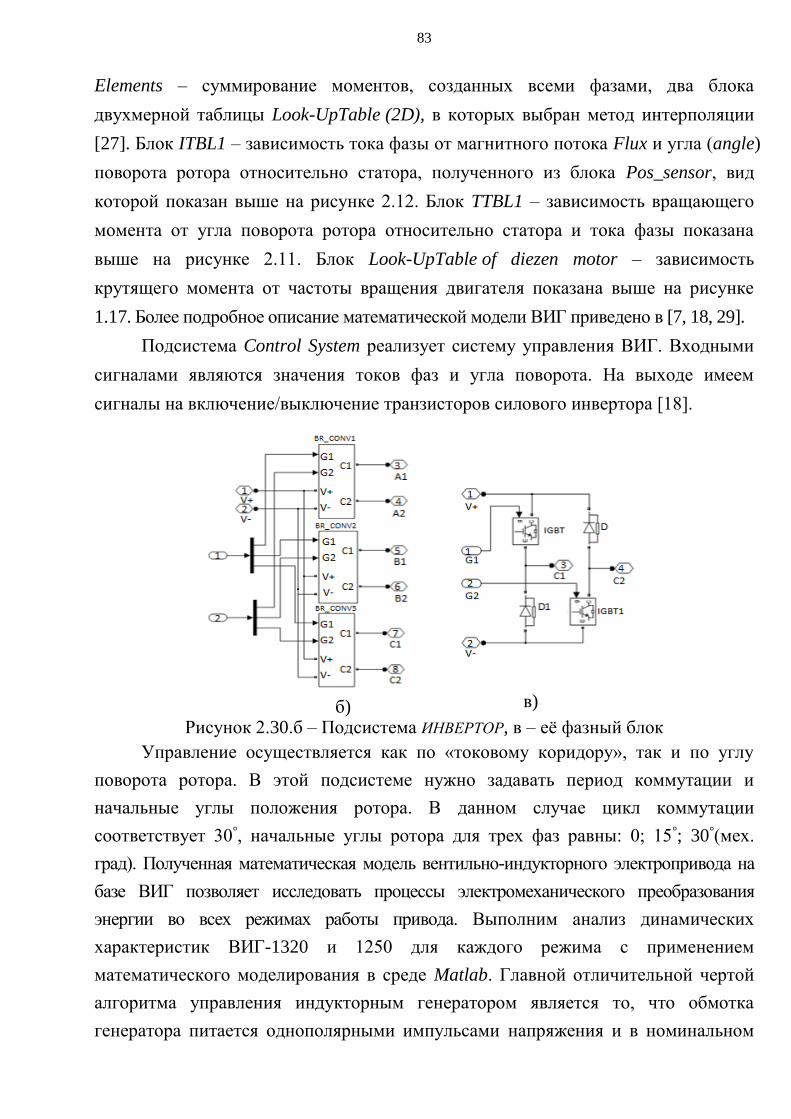
83
Elements – суммирование моментов, созданных всеми фазами, два блока
двухмерной таблицы Look-UpTable (2D), в которых выбран метод интерполяции
[27]. Блок ITBL1 – зависимость тока фазы от магнитного потока Flux и угла (angle)
поворота ротора относительно статора, полученного из блока Pos_sensor, вид
которой показан выше на рисунке 2.12. Блок TTBL1 – зависимость вращающего
момента от угла поворота ротора относительно статора и тока фазы показана
выше на рисунке 2.11. Блок Look-UpTable of diezen motor – зависимость
крутящего момента от частоты вращения двигателя показана выше на рисунке
1.17. Более подробное описание математической модели ВИГ приведено в [7, 18, 29].
Подсистема Control System реализует систему управления ВИГ. Входными
сигналами являются значения токов фаз и угла поворота. На выходе имеем
сигналы на включение/выключение транзисторов силового инвертора [18].
Рисунок 2.30.б – Подсистема ИНВЕРТОР, в – её фазный блок
Управление осуществляется как по «токовому коридору», так и по углу
поворота ротора. В этой подсистеме нужно задавать период коммутации и
начальные углы положения ротора. В данном случае цикл коммутации
соответствует 30°, начальные углы ротора для трех фаз равны: 0; 15°; 30°(мех.
град). Полученная математическая модель вентильно-индукторного электропривода на
базе ВИГ позволяет исследовать процессы электромеханического преобразования
энергии во всех режимах работы привода. Выполним анализ динамических
характеристик ВИГ-1320 и 1250 для каждого режима с применением
математического моделирования в среде Matlab. Главной отличительной чертой
алгоритма управления индукторным генератором является то, что обмотка
генератора питается однополярными импульсами напряжения и в номинальном
в) б)
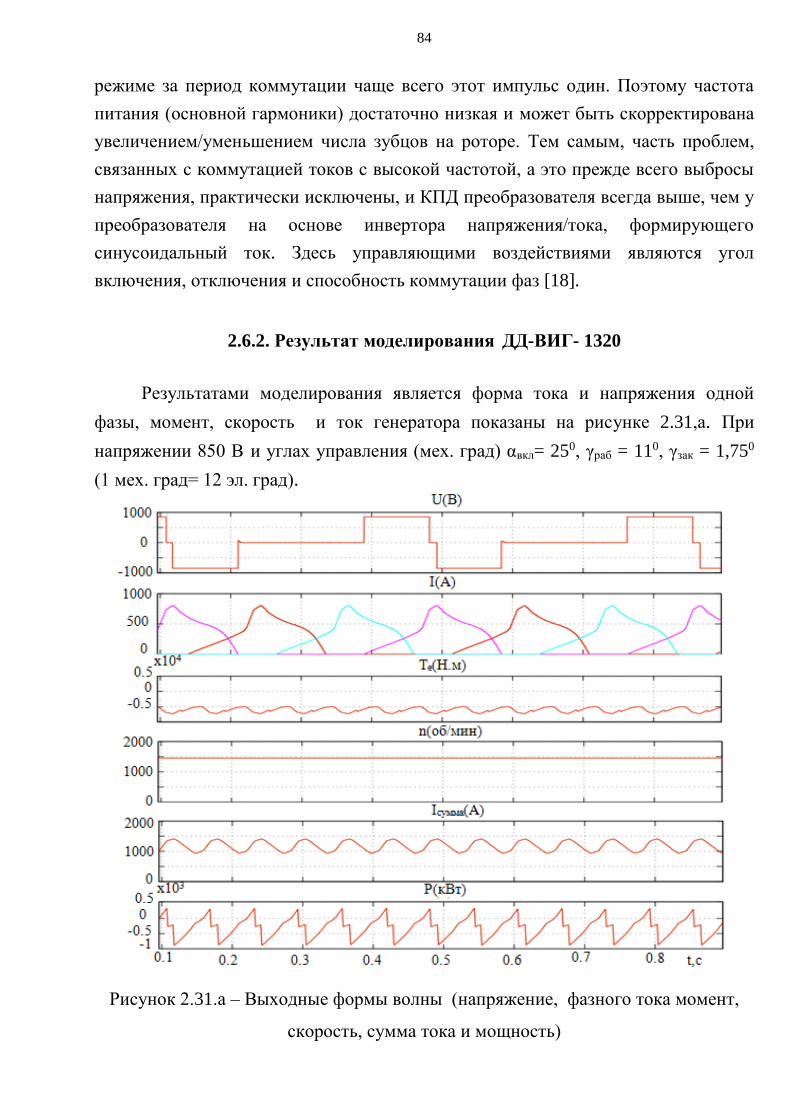
84
режиме за период коммутации чаще всего этот импульс один. Поэтому частота
питания (основной гармоники) достаточно низкая и может быть скорректирована
увеличением/уменьшением числа зубцов на роторе. Тем самым, часть проблем,
связанных с коммутацией токов с высокой частотой, а это прежде всего выбросы
напряжения, практически исключены, и КПД преобразователя всегда выше, чем у
преобразователя на основе инвертора напряжения/тока, формирующего
синусоидальный ток. Здесь управляющими воздействиями являются угол
включения, отключения и способность коммутации фаз [18].
2.6.2. Результат моделирования ДД-ВИГ- 1320
Результатами моделирования является форма тока и напряжения одной
фазы, момент, скорость и ток генератора показаны на рисунке 2.31,а. При
напряжении 850 В и углах управления (мех. град) αвкл= 250, γраб = 110, γзак = 1,750
(1 мех. град= 12 эл. град).
Рисунок 2.31.а – Выходные формы волны (напряжение, фазного тока момент,
скорость, сумма тока и мощность)
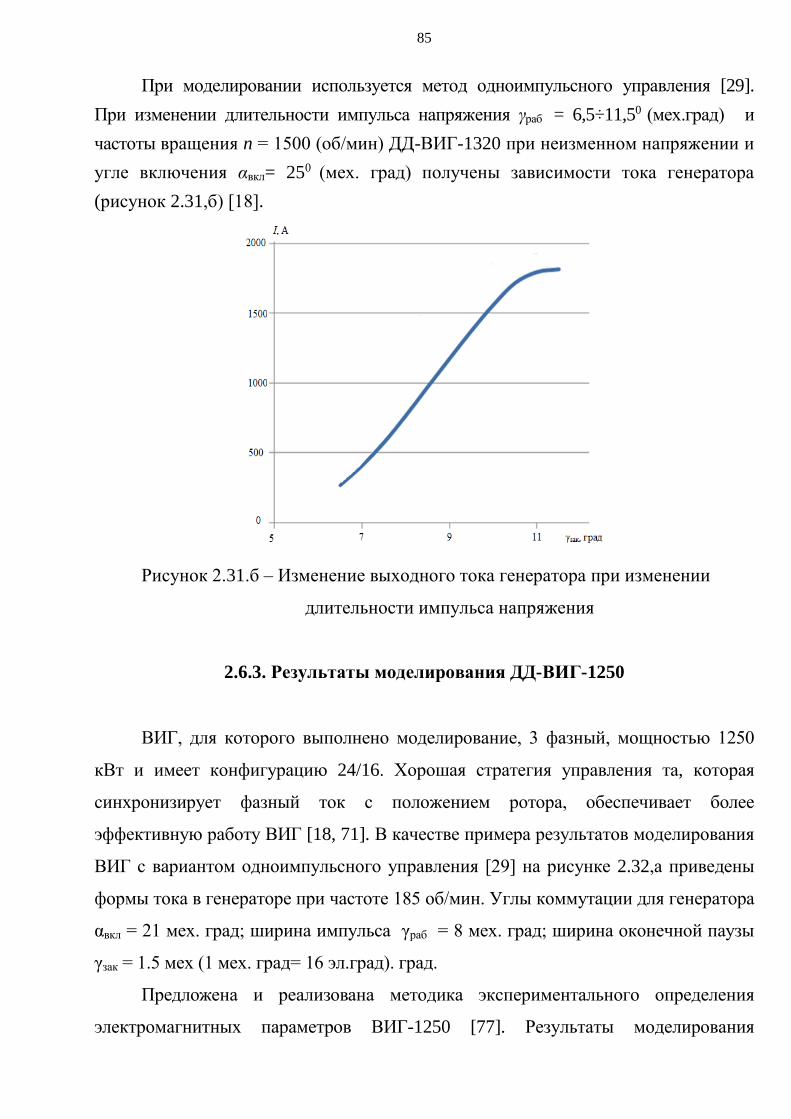
85
При моделировании используется метод одноимпульсного управления [29].
При изменении длительности импульса напряжения γраб = 6,5÷11,50 (мех.град) и
частоты вращения n = 1500 (об/мин) ДД-ВИГ-1320 при неизменном напряжении и
угле включения αвкл= 250 (мех. град) получены зависимости тока генератора
(рисунок 2.31,б) [18].
Рисунок 2.31.б – Изменение выходного тока генератора при изменении
длительности импульса напряжения
2.6.3. Результаты моделирования ДД-ВИГ-1250
ВИГ, для которого выполнено моделирование, 3 фазный, мощностью 1250
кВт и имеет конфигурацию 24/16. Хорошая стратегия управления та, которая
синхронизирует фазный ток с положением ротора, обеспечивает более
эффективную работу ВИГ [18, 71]. В качестве примера результатов моделирования
ВИГ с вариантом одноимпульсного управления [29] на рисунке 2.32,а приведены
формы тока в генераторе при частоте 185 об/мин. Углы коммутации для генератора
αвкл = 21 мех. град; ширина импульса γраб = 8 мех. град; ширина оконечной паузы
γзак = 1.5 мех (1 мех. град= 16 эл.град). град.
Предложена и реализована методика экспериментального определения
электромагнитных параметров ВИГ-1250 [77]. Результаты моделирования
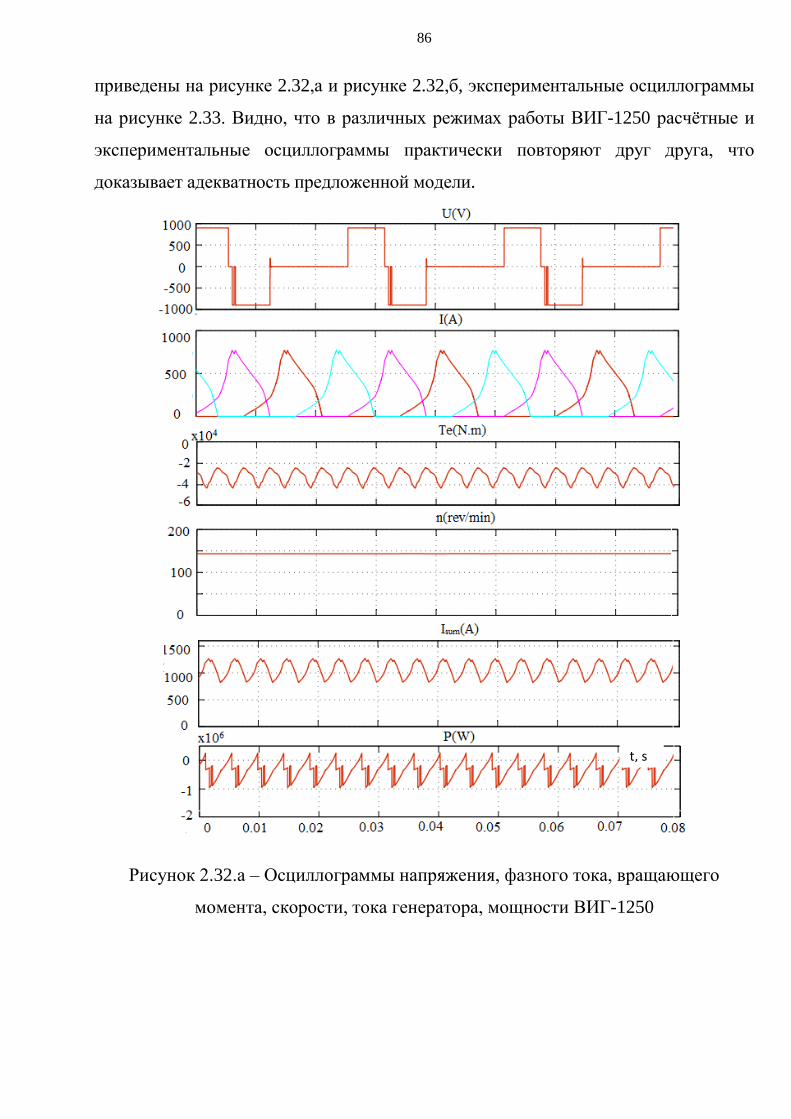
86
приведены на рисунке 2.32,а и рисунке 2.32,б, экспериментальные осциллограммы
на рисунке 2.33. Видно, что в различных режимах работы ВИГ-1250 расчётные и
экспериментальные осциллограммы практически повторяют друг друга, что
доказывает адекватность предложенной модели.
Рисунок 2.32.а – Осциллограммы напряжения, фазного тока, вращающего
момента, скорости, тока генератора, мощности ВИГ-1250
t, s
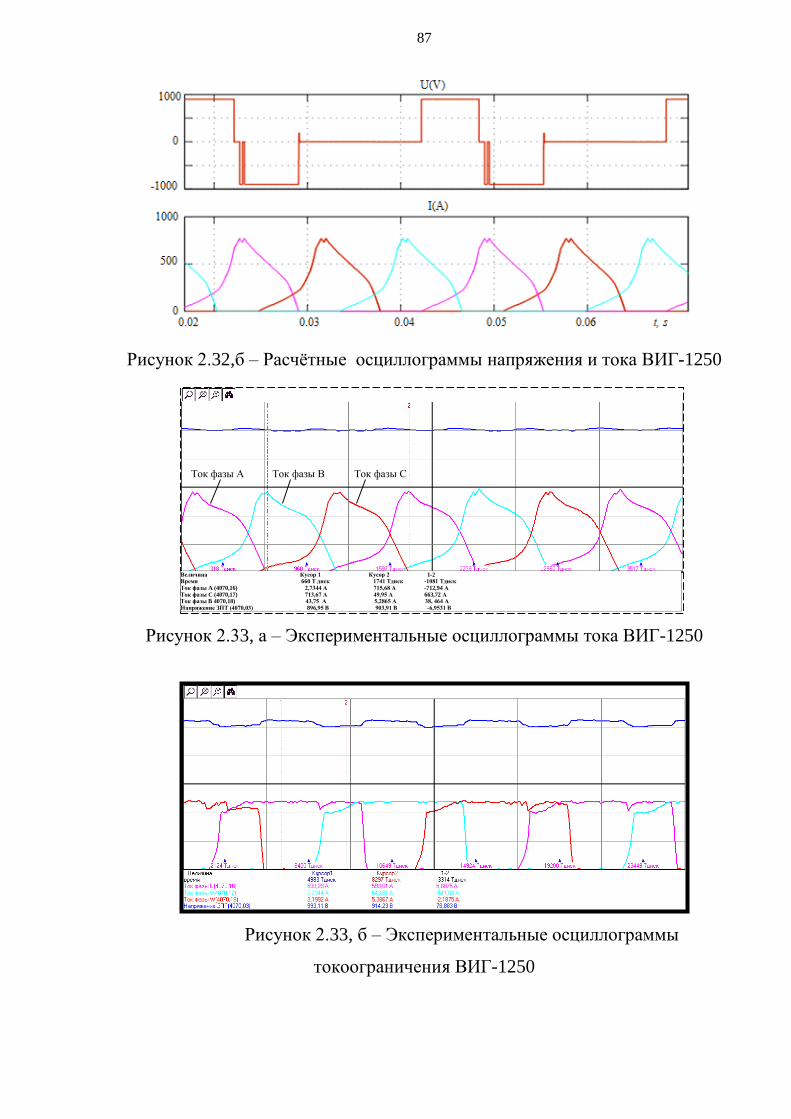
87
Рисунок 2.32,б – Расчётные осциллограммы напряжения и тока ВИГ-1250
Рисунок 2.33, а – Экспериментальные осциллограммы тока ВИГ-1250
Рисунок 2.33, б – Экспериментальные осциллограммы
токоограничения ВИГ-1250
Величина Кусор 1 Кусор 2 1-2 Время 660 Т диск 1741 Тдиск -1081 Тдиск Ток фазы A (4070,16) 2,7344 А 715,68 А -712,94 А Ток фазы C (4070,17) 713,67 А 49,95 А 663,72 А Ток фазы B 4070,18) 43,75 А 5,2865 А 38, 464 А Напряжение ЗПТ (4070,03) 896,95 В 903,91 В -6,9531 В
Ток фазы А Ток фазы В Ток фазы С
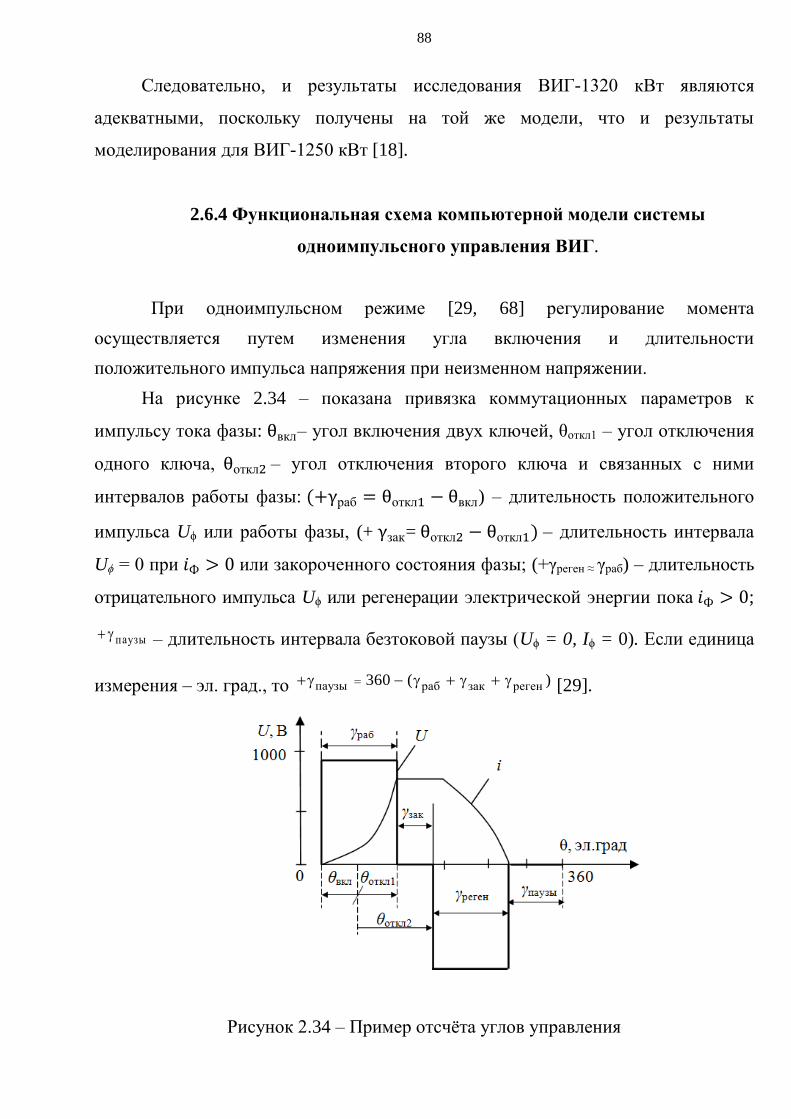
88
Следовательно, и результаты исследования ВИГ-1320 кВт являются
адекватными, поскольку получены на той же модели, что и результаты
моделирования для ВИГ-1250 кВт [18].
2.6.4 Функциональная схема компьютерной модели системы
одноимпульсного управления ВИГ.
При одноимпульсном режиме [29, 68] регулирование момента
осуществляется путем изменения угла включения и длительности
положительного импульса напряжения при неизменном напряжении.
На рисунке 2.34 – показана привязка коммутационных параметров к
импульсу тока фазы: θвкл– угол включения двух ключей, θоткл1 – угол отключения
одного ключа, θоткл2 – угол отключения второго ключа и связанных с ними
интервалов работы фазы: (+γраб = θоткл1 − θвкл) – длительность положительного
импульса Uϕ или работы фазы, (+ γзак= θоткл2 − θоткл1) – длительность интервала
Uϕ = 0 при 𝑖Ф > 0 или закороченного состояния фазы; (+γреген ≈ γраб) – длительность
отрицательного импульса Uϕ или регенерации электрической энергии пока 𝑖Ф > 0;
паузы – длительность интервала безтоковой паузы (Uϕ = 0, Iϕ = 0). Если единица
измерения – эл. град., то паузы раб зак реген360 ( ) [29].
Рисунок 2.34 – Пример отсчёта углов управления
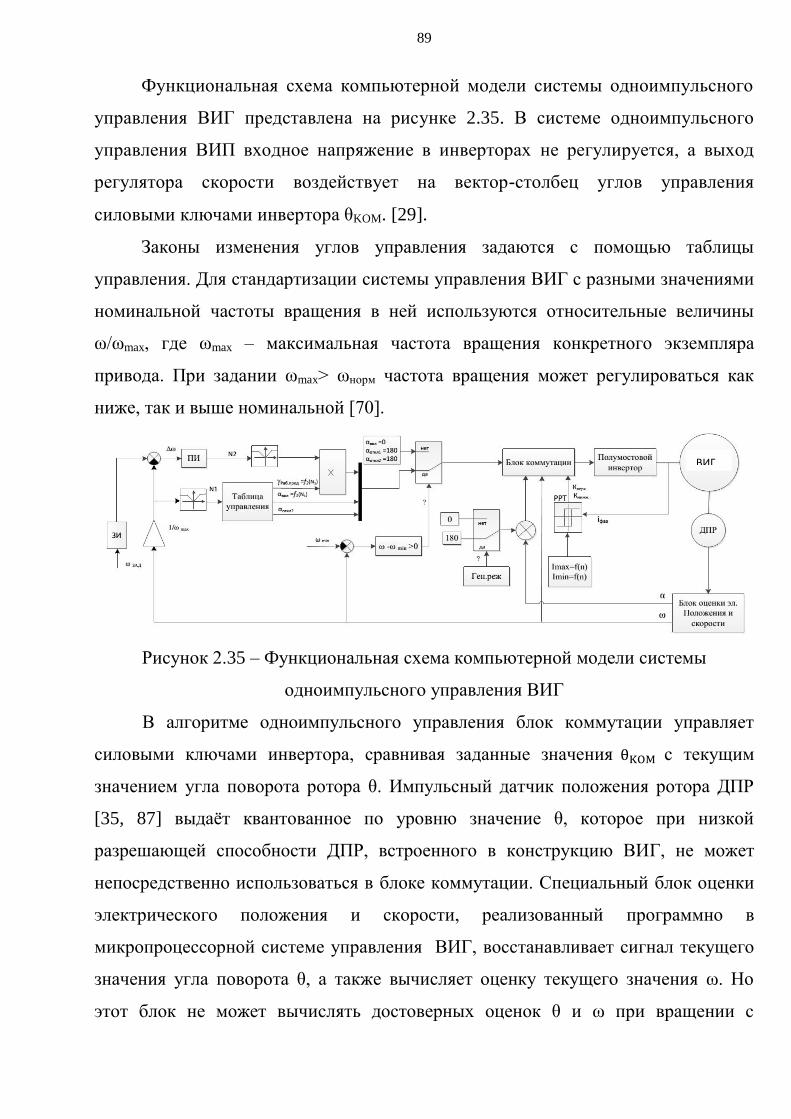
89
Функциональная схема компьютерной модели системы одноимпульсного
управления ВИГ представлена на рисунке 2.35. В системе одноимпульсного
управления ВИП входное напряжение в инверторах не регулируется, а выход
регулятора скорости воздействует на вектор-столбец углов управления
силовыми ключами инвертора θKOM. [29].
Законы изменения углов управления задаются с помощью таблицы
управления. Для стандартизации системы управления ВИГ с разными значениями
номинальной частоты вращения в ней используются относительные величины
ω/ωmax, где ωmax – максимальная частота вращения конкретного экземпляра
привода. При задании ωmax> ωнорм частота вращения может регулироваться как
ниже, так и выше номинальной [70].
Рисунок 2.35 – Функциональная схема компьютерной модели системы
одноимпульсного управления ВИГ
В алгоритме одноимпульсного управления блок коммутации управляет
силовыми ключами инвертора, сравнивая заданные значения θKOM c текущим
значением угла поворота ротора θ. Импульсный датчик положения ротора ДПР
[35, 87] выдаёт квантованное по уровню значение θ, которое при низкой
разрешающей способности ДПР, встроенного в конструкцию ВИГ, не может
непосредственно использоваться в блоке коммутации. Специальный блок оценки
электрического положения и скорости, реализованный программно в
микропроцессорной системе управления ВИГ, восстанавливает сигнал текущего
значения угла поворота θ, а также вычисляет оценку текущего значения ω. Но
этот блок не может вычислять достоверных оценок θ и ω при вращении с
ВИГ
90
частотами меньше некоторого минимального значения ωmin. Поэтому при работе
на низких частотах, фазы коммутируются непосредственно по сигналам ДПР. Для
реализации этого режима в компьютерной модели рассматриваем переключение
сигналов управления на входе блока коммутации в функции разности min.
Начальное значение углов θвкл = 0, γраб = 180, γзак = 0 на рисунке 2.34, наиболее
просто реализуется при управлении непосредственно от сигналов датчика
положения ротора и не требует знания текущего значения скорости и каких-либо
дополнительных вычислений, в том числе и обращения к таблице управления [29,
32, 120]. При таких углах фаза включается в полностью рассогласованном
положении и отключается в согласованном. На низких скоростях значение
момента определяется заданной уставкой токоограничения Imax() на входе
релейного регулятора тока РРТ, при достижения Imax() верхний ключ Kверх
отключается и при достижении заданного Imin(n) нижний ключ отключается. С
целью обеспечения универсальности алгоритма управления вводятся
относительные величины зад/max и /max. Предлагается разделить функции
управления углами или ввести два управляющих параметра N1 и N2. N1 по-
прежнему считать относительным значением скорости и с его помощью
определять по таблице значение θвкл= f1(N1). Второй управляющий параметр
N2= Мзад/Мпред (Мзад – заданное значение момента; Мпред – предельное значение
момента), используется для изменения αраб при текущем значении N1. В начале из
таблицы управления θшаг. пред= f2(N1) получаем предельное значение θшаг,
обеспечивающее получение для текущего значения скорости максимального
требуемого момента. Далее для получения текущего значения интервала работы
используется формула γраб = θраб. пред *N2. При этом предполагается, что значение
М прямо пропорционально длительности импульса αраб. Это допущение позволяет
упростить алгоритм управления и его практическую реализацию. При ω<ωзад
имеем ограничение выхода регулятора скорости N2=1 и получаем характеристику
максимального момента Мпред(ω) и, если момент нагрузки Мс меньше Мпред, то
будет происходить разгон до любой заданной скорости, при достижении которой
регулятор скорости уменьшит значение N2, что обеспечит равенство
91
М(θвкл, θраб< θраб.пред) = Мс. При ω > ωзад имеем ограничение N2=0 и торможение
ВИГ происходит под действием момента нагрузки Мс [29, 32, 70, 120].
При одноимпульсном управлении: законы управления обеспечивают высокий
КПД и относительно низкие пульсации момента.
Выводы по главе 2
1. Произведен выбор дизельного двигателя для автономного источника
энергии.
2. Разработана математическая модель и алгоритм расчёта ВИГ, основанный
на расчёте магнитного поля генератора методом конечных элементов.
3. Выполнены расчёты параметров и характеристик вентильно - индукторных
генераторов мощностью 1320 и 1250 кВт с конфигурацией статора/ротора
соответственно 18/12 и 24/16 в программных комплексах Elcut и Matlab-Simulink.
4. Результаты расчётов ВИГ мощностью 1250 кВт хорошо согласуются с
результатами, полученными при экспериментальных исследованиях опытного
образца, что говорит об адекватности разработанной математической модели ВИГ.
5. Проведен сравнительный анализ двух схем питания ВИГ мощностью 1100
кВт с управляемым инвертором (два способа регулирования выходной мощности)
и с неуправляемым выпрямителем на выходе, из которых первая (при
регулировании выходной мощности путем сдвига зак в сторону опережения при
неизменном положении вкл и отк) показала лучшие характеристики и
рекомендована для разработки рациональный вариант управления ВИГ.
6. Разработана компьютерная модель системы ДД-ВИГ и проведено
исследование динамических процессов электромеханического преобразования
энергии во всех режимах работы привода с выбором и исследованием алгоритма
управления ВИГ [18].
7. Выбран алгоритм управления ВИГ и рассмотрено влияние
коммутационных параметров на основные его показатели в различных режимах.
Представлены зависимости выходной мощности и действующего значения тока
фазы от изменения углов управления для генераторного режима [34].
92
ГЛАВА 3. ТЕХНИЧЕСКОЕ СОВЕРШЕНСТВОВАНИЕ АВТОНОМНОГО
ЗАРЯДНО – РАЗРЯДНОГО ЭЛЕКТРОТЕХНИЧЕСКОГО КОМПЛЕКСА
АККУМУЛЯТОРНЫХ БАТАРЕЙ
В этой главе предложены структура и состав нового АЗРЭТК, алгоритм
программного управления комплексом и разработана система управления с
выбором аппаратных и программных средств, представлен выбор элементов и
устройств зарядно-разрядного комплекса.
Разработана многоуровневая система мониторинга АБ, ее состав, алгоритмы
и программы работы основных блоков.
Представлена функциональная схема блока рекуперации, обеспечивающая
экономию электроэнергии в сети напряжения переменного тока. Представлены
результаты математического моделирования АЗРЭТК в программе
Matlab/Simulink по ступеням заряда - разряда АБ, проведен цикл теоретических
исследований и сравнение с результатами экспериментальных исследований для
апробации эффективных алгоритмов режимов заряда – разряда, регенерации
аккумуляторных батарей. Проведено экспериментальное исследование режимов
заряда-разряда АЗРЭТК: при комплексном контроле напряжения на
аккумуляторах, токов заряда, разряда, зависимостей напряжения при заряде и
разряде, емкости, плотности электролита в реальном времени.
3.1. Математическое моделирование аккумуляторной батареи
зарядно - разрядного комплекса.
На рисунке 3.1 представлена функциональная схема АБ, помогающая
образовать ее математеческую модель. В схему включается управляющий
источник напряжения (Controlled voltage source); внутренный резистор (Internal
resistance), с сопротивлением не более 1 Ом; ключ (switch), который управляет
зарядом и разрядом при условиях 1 и 0; фильтр (filter) потери тока первого
порядка; блок заряда (charge) и блок разряда (discharge); блок экспоненциальной
динамики зоны (Exp).
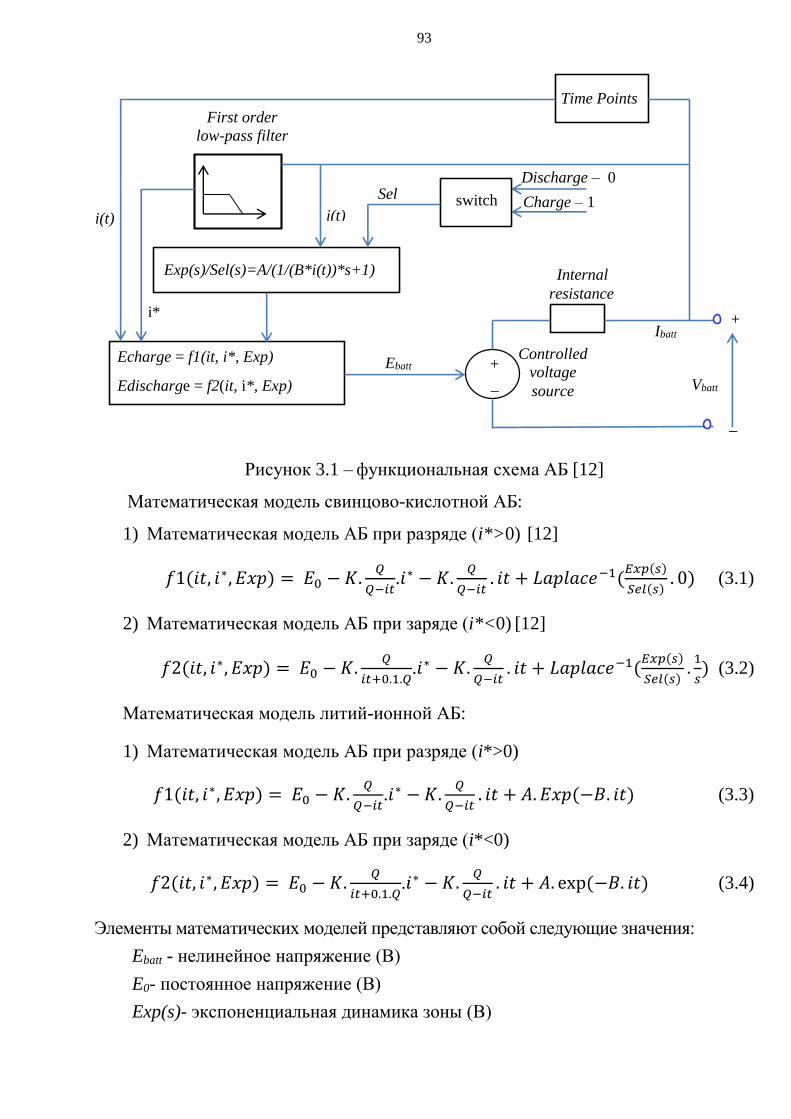
93
Рисунок 3.1 – функциональная схема АБ [12]
Математическая модель свинцово-кислотной АБ:
1) Математическая модель АБ при разряде (i*>0) [12]
𝑓1(𝑖𝑡, 𝑖∗, 𝐸𝑥𝑝) = 𝐸0 − 𝐾.𝑄
𝑄−𝑖𝑡.𝑖∗ − 𝐾.
𝑄
𝑄−𝑖𝑡. 𝑖𝑡 + 𝐿𝑎𝑝𝑙𝑎𝑐𝑒−1(
𝐸𝑥𝑝(𝑠)
𝑆𝑒𝑙(𝑠). 0) (3.1)
2) Математическая модель АБ при заряде (i*<0) [12]
𝑓2(𝑖𝑡, 𝑖∗, 𝐸𝑥𝑝) = 𝐸0 − 𝐾.𝑄
𝑖𝑡+0.1.𝑄.𝑖∗ − 𝐾.
𝑄
𝑄−𝑖𝑡. 𝑖𝑡 + 𝐿𝑎𝑝𝑙𝑎𝑐𝑒−1(
𝐸𝑥𝑝(𝑠)
𝑆𝑒𝑙(𝑠).
1
𝑠) (3.2)
Математическая модель литий-ионной АБ:
1) Математическая модель АБ при разряде (i*>0)
𝑓1(𝑖𝑡, 𝑖∗, 𝐸𝑥𝑝) = 𝐸0 − 𝐾.𝑄
𝑄−𝑖𝑡.𝑖∗ − 𝐾.
𝑄
𝑄−𝑖𝑡. 𝑖𝑡 + 𝐴. 𝐸𝑥𝑝(−𝐵. 𝑖𝑡) (3.3)
2) Математическая модель АБ при заряде (i*<0)
𝑓2(𝑖𝑡, 𝑖∗, 𝐸𝑥𝑝) = 𝐸0 − 𝐾.𝑄
𝑖𝑡+0.1.𝑄.𝑖∗ − 𝐾.
𝑄
𝑄−𝑖𝑡. 𝑖𝑡 + 𝐴. exp (−𝐵. 𝑖𝑡) (3.4)
Элементы математических моделей представляют собой следующие значения:
Ebatt - нелинейное напряжение (В)
E0- постоянное напряжение (В)
Exp(s)- экспоненциальная динамика зоны (B)
Time Points
First order
low-pass filter
Sel Discharge – 0
Charge – 1
Exp(s)/Sel(s)=A/(1/(B*i(t))*s+1)
Echarge = f1(it, i*, Exp)
Edischarge = f2(it, i*, Exp)
+
_
i(t) i(t)
i*
switch
Ebatt
Internal
resistance
Controlled
voltage
source
+
_
Vbatt
Ibatt
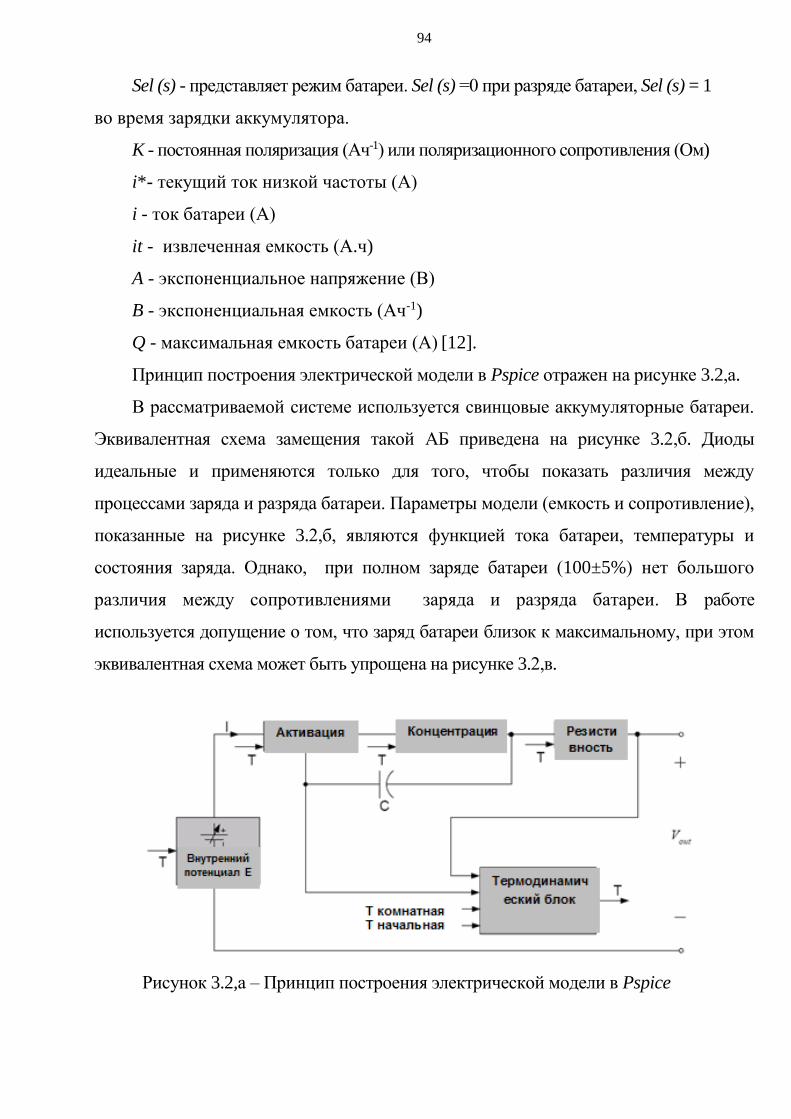
94
Sel (s) - представляет режим батареи. Sel (s) =0 при разряде батареи, Sel (s) = 1
во время зарядки аккумулятора.
K - постоянная поляризация (Ач-1) или поляризационного сопротивления (Ом)
i*- текущий ток низкой частоты (A)
i - ток батареи (А)
it - извлеченная емкость (A.ч)
A - экспоненциальное напряжение (В)
B - экспоненциальная емкость (Ач-1)
Q - максимальная емкость батареи (А) [12].
Принцип построения электрической модели в Pspice отражен на рисунке 3.2,а.
В рассматриваемой системе используется свинцовые аккумуляторные батареи.
Эквивалентная схема замещения такой АБ приведена на рисунке 3.2,б. Диоды
идеальные и применяются только для того, чтобы показать различия между
процессами заряда и разряда батареи. Параметры модели (емкость и сопротивление),
показанные на рисунке 3.2,б, являются функцией тока батареи, температуры и
состояния заряда. Однако, при полном заряде батареи (100±5%) нет большого
различия между сопротивлениями заряда и разряда батареи. В работе
используется допущение о том, что заряд батареи близок к максимальному, при этом
эквивалентная схема может быть упрощена на рисунке 3.2,в.
Рисунок 3.2,а – Принцип построения электрической модели в Pspice
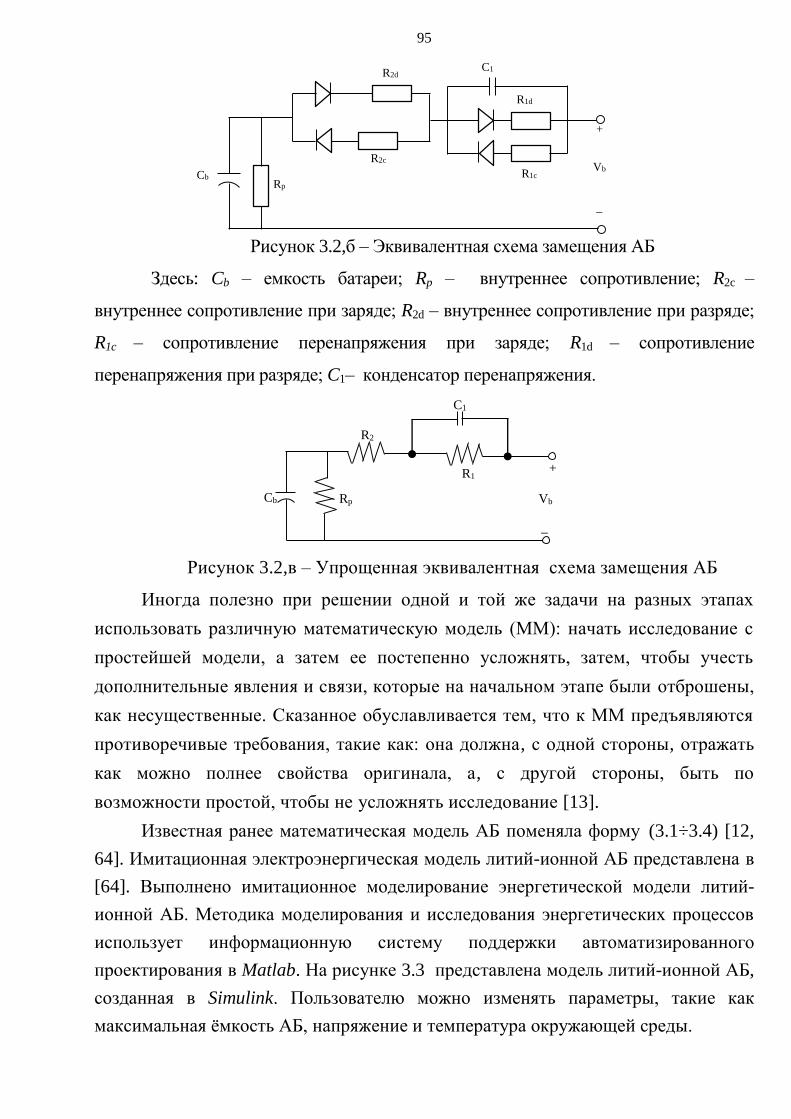
95
Рисунок 3.2,б – Эквивалентная схема замещения АБ
Здесь: Cb – емкость батареи; Rp – внутреннее сопротивление; R2c –
внутреннее сопротивление при заряде; R2d – внутреннее сопротивление при разряде;
R1c – сопротивление перенапряжения при заряде; R1d – сопротивление
перенапряжения при разряде; C1– конденсатор перенапряжения.
Рисунок 3.2,в – Упрощенная эквивалентная схема замещения АБ
Иногда полезно при решении одной и той же задачи на разных этапах
использовать различную математическую модель (ММ): начать исследование с
простейшей модели, а затем ее постепенно усложнять, затем, чтобы учесть
дополнительные явления и связи, которые на начальном этапе были отброшены,
как несущественные. Сказанное обуславливается тем, что к ММ предъявляются
противоречивые требования, такие как: она должна, с одной стороны, отражать
как можно полнее свойства оригинала, а, с другой стороны, быть по
возможности простой, чтобы не усложнять исследование [13].
Известная ранее математическая модель АБ поменяла форму (3.1÷3.4) [12,
64]. Имитационная электроэнергическая модель литий-ионной АБ представлена в
[64]. Выполнено имитационное моделирование энергетической модели литий-
ионной АБ. Методика моделирования и исследования энергетических процессов
использует информационную систему поддержки автоматизированного
проектирования в Matlab. На рисунке 3.3 представлена модель литий-ионной АБ,
созданная в Simulink. Пользователю можно изменять параметры, такие как
максимальная ёмкость АБ, напряжение и температура окружающей среды.
Cb Rp
R2c
R2d C1
R1d
R1c
+
_
Vb
+
_
Cb Rp
R2
R1
C1
Vb
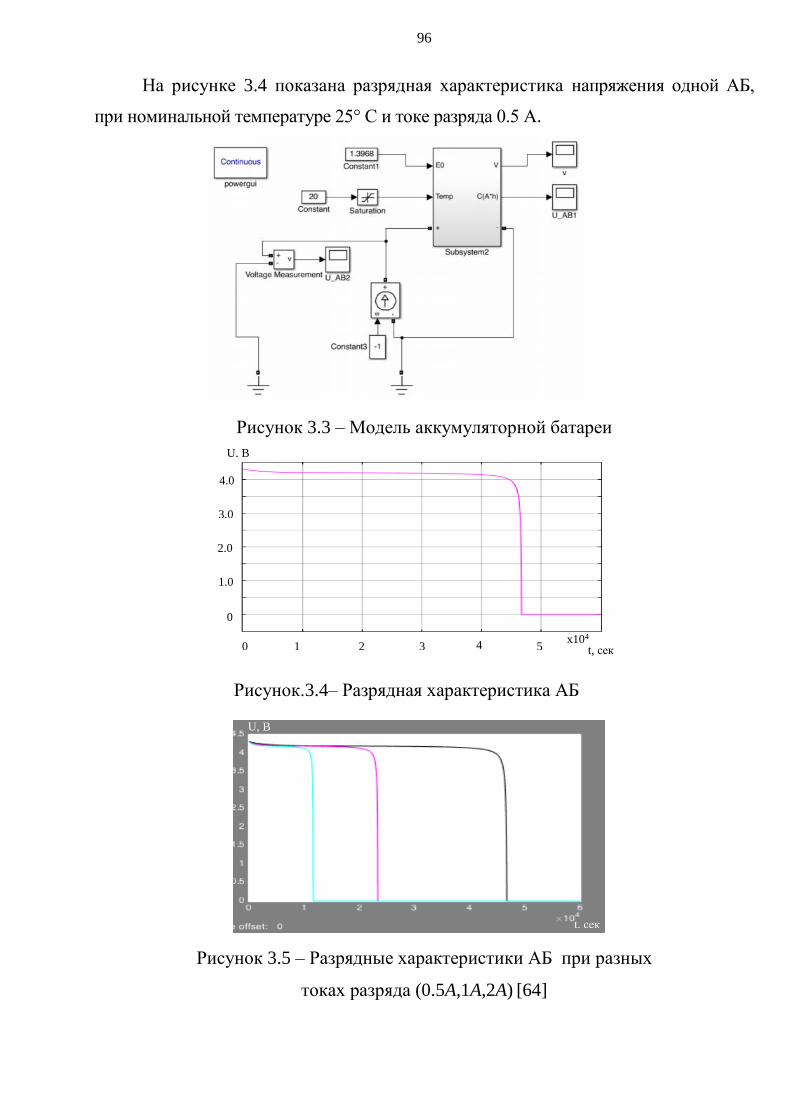
96
На рисунке 3.4 показана разрядная характеристика напряжения одной АБ,
при номинальной температуре 25° С и токе разряда 0.5 А.
Рисунок 3.3 – Модель аккумуляторной батареи
Рисунок.3.4– Разрядная характеристика АБ
Рисунок 3.5 – Разрядные характеристики АБ при разных
токах разряда (0.5A,1A,2A) [64]
0 1 2 3 4 5
4.0
0
1.0
2.0
3.0
U, B
t, сек x104
U, B
t, сек
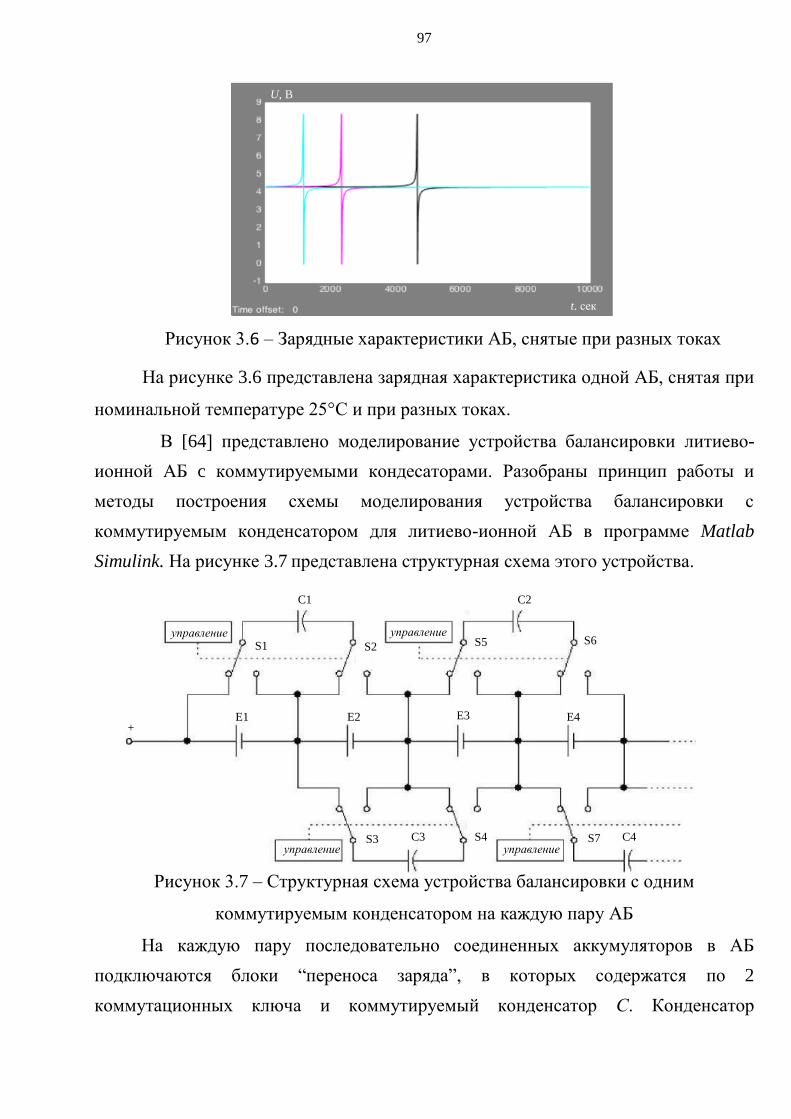
97
Рисунок 3.6 – Зарядные характеристики АБ, снятые при разных токах
На рисунке 3.6 представлена зарядная характеристика одной АБ, снятая при
номинальной температуре 25°С и при разных токах.
В [64] представлено моделирование устройства балансировки литиево-
ионной АБ c коммутируемыми кондесаторами. Разобраны принцип работы и
методы построения схемы моделирования устройства балансировки с
коммутируемым конденсатором для литиево-ионной АБ в программе Matlab
Simulink. На рисунке 3.7 представлена структурная схема этого устройства.
Рисунок 3.7 – Структурная схема устройства балансировки с одним
коммутируемым конденсатором на каждую пару АБ
На каждую пару последовательно соединенных аккумуляторов в АБ
подключаются блоки “переноса заряда”, в которых содержатся по 2
коммутационных ключа и коммутируемый конденсатор С. Конденсатор
управление управление
управление управление
S1 S2 S5 S6
S3 S4 S7
E1 E2 E3 E4
C1 C2
C3 C4
+
t, сек
U, B
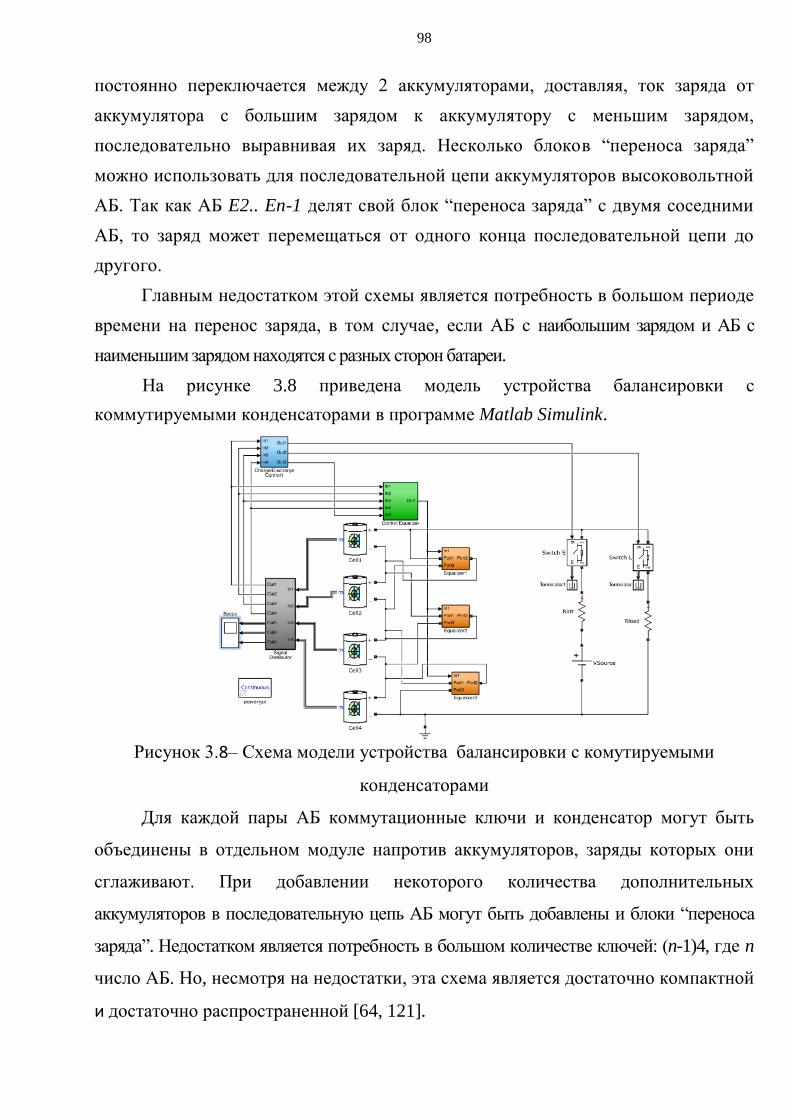
98
постоянно переключается между 2 аккумуляторами, доставляя, ток заряда от
аккумулятора с большим зарядом к аккумулятору с меньшим зарядом,
последовательно выравнивая их заряд. Несколько блоков “переноса заряда”
можно использовать для последовательной цепи аккумуляторов высоковольтной
АБ. Так как АБ E2.. En-1 делят свой блок “переноса заряда” с двумя соседними
АБ, то заряд может перемещаться от одного конца последовательной цепи до
другого.
Главным недостатком этой схемы является потребность в большом периоде
времени на перенос заряда, в том случае, если АБ с наибольшим зарядом и АБ с
наименьшим зарядом находятся с разных сторон батареи.
На рисунке 3.8 приведена модель устройства балансировки с
коммутируемыми конденсаторами в программе Matlab Simulink.
Рисунок 3.8– Схема модели устройства балансировки с комутируемыми
конденсаторами
Для каждой пары АБ коммутационные ключи и конденсатор могут быть
объединены в отдельном модуле напротив аккумуляторов, заряды которых они
сглаживают. При добавлении некоторого количества дополнительных
аккумуляторов в последовательную цепь АБ могут быть добавлены и блоки “переноса
заряда”. Недостатком является потребность в большом количестве ключей: (n-1)4, где n
число АБ. Но, несмотря на недостатки, эта схема является достаточно компактной
и достаточно распространенной [64, 121].
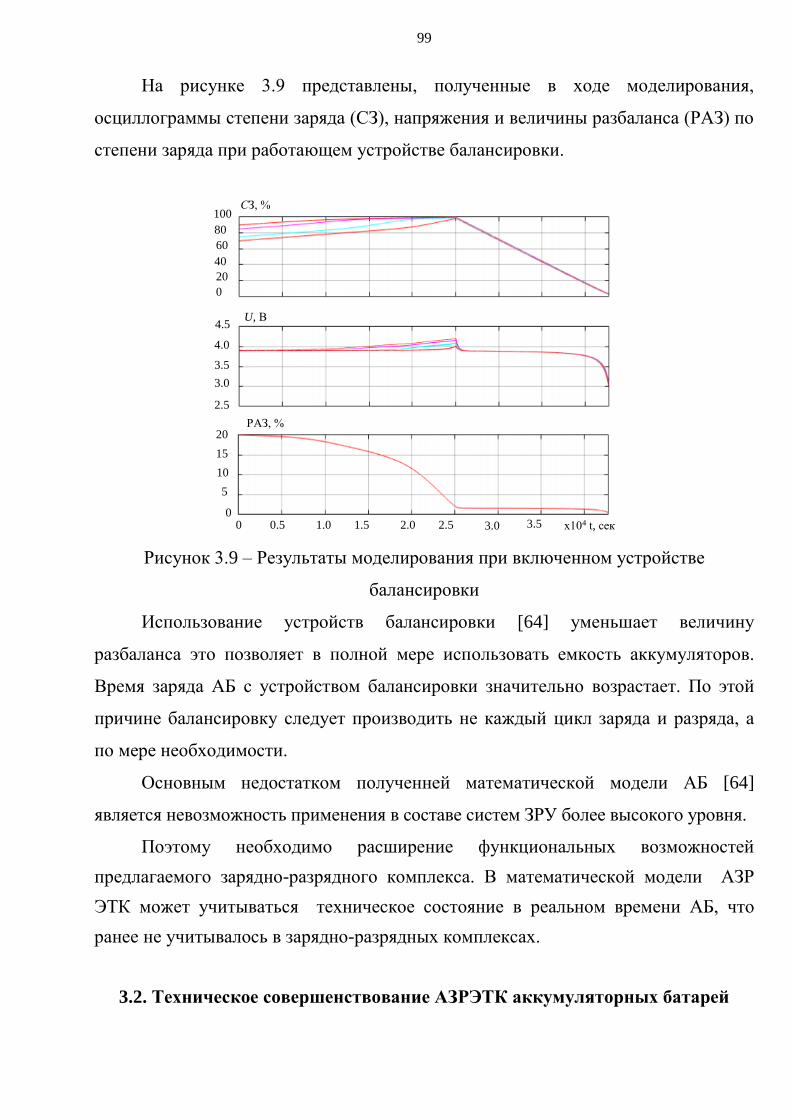
99
На рисунке 3.9 представлены, полученные в ходе моделирования,
осциллограммы степени заряда (СЗ), напряжения и величины разбаланса (РАЗ) по
степени заряда при работающем устройстве балансировки.
Рисунок 3.9 – Результаты моделирования при включенном устройстве
балансировки
Использование устройств балансировки [64] уменьшает величину
разбаланса это позволяет в полной мере использовать емкость аккумуляторов.
Время заряда АБ с устройством балансировки значительно возрастает. По этой
причине балансировку следует производить не каждый цикл заряда и разряда, а
по мере необходимости.
Основным недостатком полученней математической модели АБ [64]
является невозможность применения в составе систем ЗРУ более высокого уровня.
Поэтому необходимо расширение функциональных возможностей
предлагаемого зарядно-разрядного комплекса. В математической модели АЗР
ЭТК может учитываться техническое состояние в реальном времени АБ, что
ранее не учитывалось в зарядно-разрядных комплексах.
3.2. Техническое совершенствование АЗРЭТК аккумуляторных батарей
100
0
80
60
40
20
4.5
4.0
3.5
3.0
2.5
20
15
10
5
0 0 0.5 1.0 1.5 2.0 2.5 3.0 3.5 х104 t, сек
U, В
СЗ, %
РАЗ, %
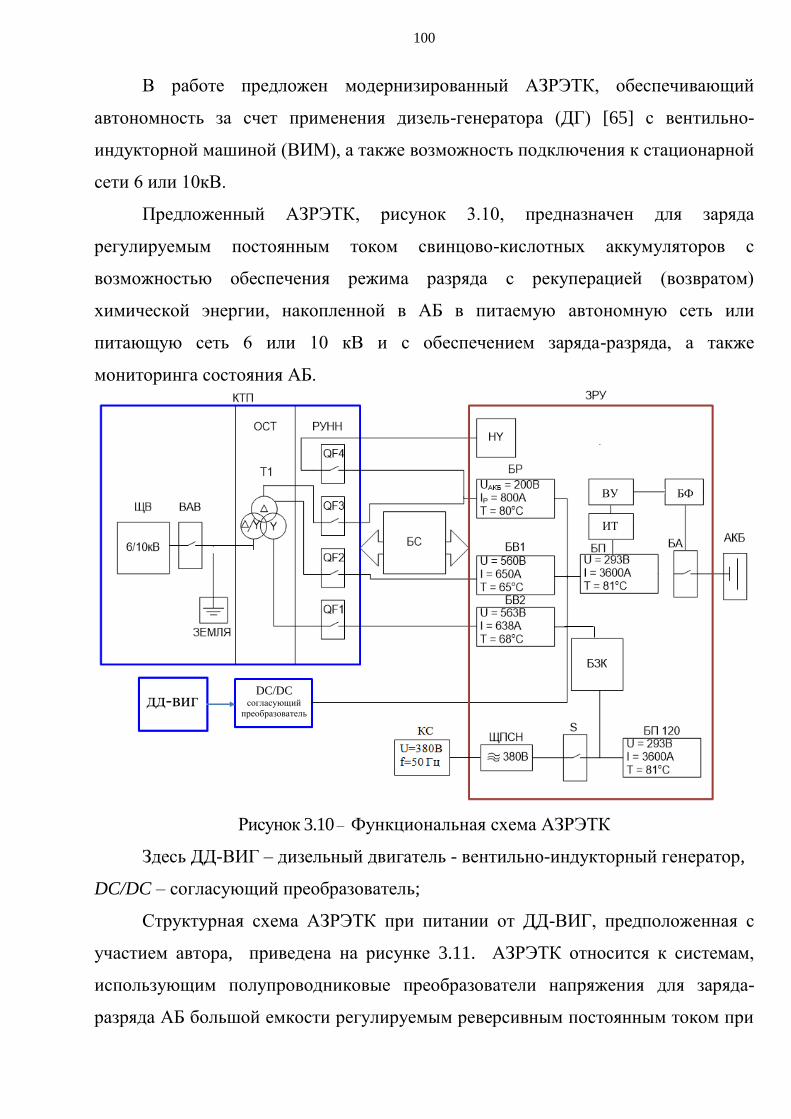
100
В работе предложен модернизированный АЗРЭТК, обеспечивающий
автономность за счет применения дизель-генератора (ДГ) [65] с вентильно-
индукторной машиной (ВИМ), а также возможность подключения к стационарной
сети 6 или 10кВ.
Предложенный АЗРЭТК, рисунок 3.10, предназначен для заряда
регулируемым постоянным током свинцово-кислотных аккумуляторов с
возможностью обеспечения режима разряда с рекуперацией (возвратом)
химической энергии, накопленной в АБ в питаемую автономную сеть или
питающую сеть 6 или 10 кВ и с обеспечением заряда-разряда, а также
мониторинга состояния АБ.
Функциональная схема АЗРЭТК приведена на рис. 3.10.
Рисунок 3.10 – Функциональная схема АЗРЭТК
Здесь ДД-ВИГ – дизельный двигатель - вентильно-индукторный генератор,
DC/DC – согласующий преобразователь;
Структурная схема АЗРЭТК при питании от ДД-ВИГ, предположенная с
участием автора, приведена на рисунке 3.11. АЗРЭТК относится к системам,
использующим полупроводниковые преобразователи напряжения для заряда-
разряда АБ большой емкости регулируемым реверсивным постоянным током при
дд-виг DC/DC
согласующий
преобразователь
ВУ
ИТ
БФ
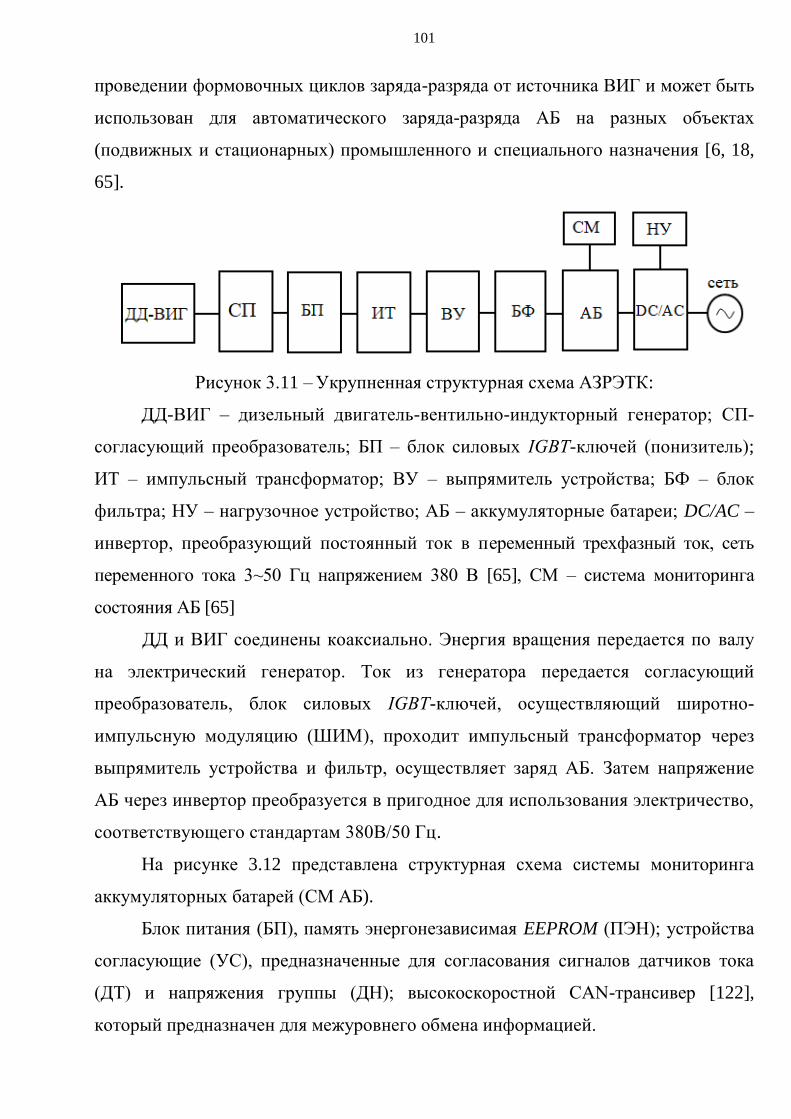
101
проведении формовочных циклов заряда-разряда от источника ВИГ и может быть
использован для автоматического заряда-разряда АБ на разных объектах
(подвижных и стационарных) промышленного и специального назначения [6, 18,
65].
Рисунок 3.11 – Укрупненная структурная схема АЗРЭТК:
ДД-ВИГ – дизельный двигатель-вентильно-индукторный генератор; СП-
согласующий преобразователь; БП – блок силовых IGВТ-ключей (понизитель);
ИТ – импульсный трансформатор; ВУ – выпрямитель устройства; БФ – блок
фильтра; НУ – нагрузочное устройство; АБ – аккумуляторные батареи; DC/AC –
инвертор, преобразующий постоянный ток в переменный трехфазный ток, сеть
переменного тока 3~50 Гц напряжением 380 В [65], СМ – система мониторинга
состояния АБ [65]
ДД и ВИГ соединены коаксиально. Энергия вращения передается по валу
на электрический генератор. Ток из генератора передается согласующий
преобразователь, блок силовых IGВТ-ключей, осуществляющий широтно-
импульсную модуляцию (ШИМ), проходит импульсный трансформатор через
выпрямитель устройства и фильтр, осуществляет заряд АБ. Затем напряжение
АБ через инвертор преобразуется в пригодное для использования электричество,
соответствующего стандартам 380В/50 Гц.
На рисунке 3.12 представлена структурная схема системы мониторинга
аккумуляторных батарей (СМ АБ).
Блок питания (БП), память энергонезависимая EEPROM (ПЭН); устройства
согласующие (УС), предназначенные для согласования сигналов датчиков тока
(ДТ) и напряжения группы (ДН); высокоскоростной CAN-трансивер [122],
который предназначен для межуровнего обмена информацией.
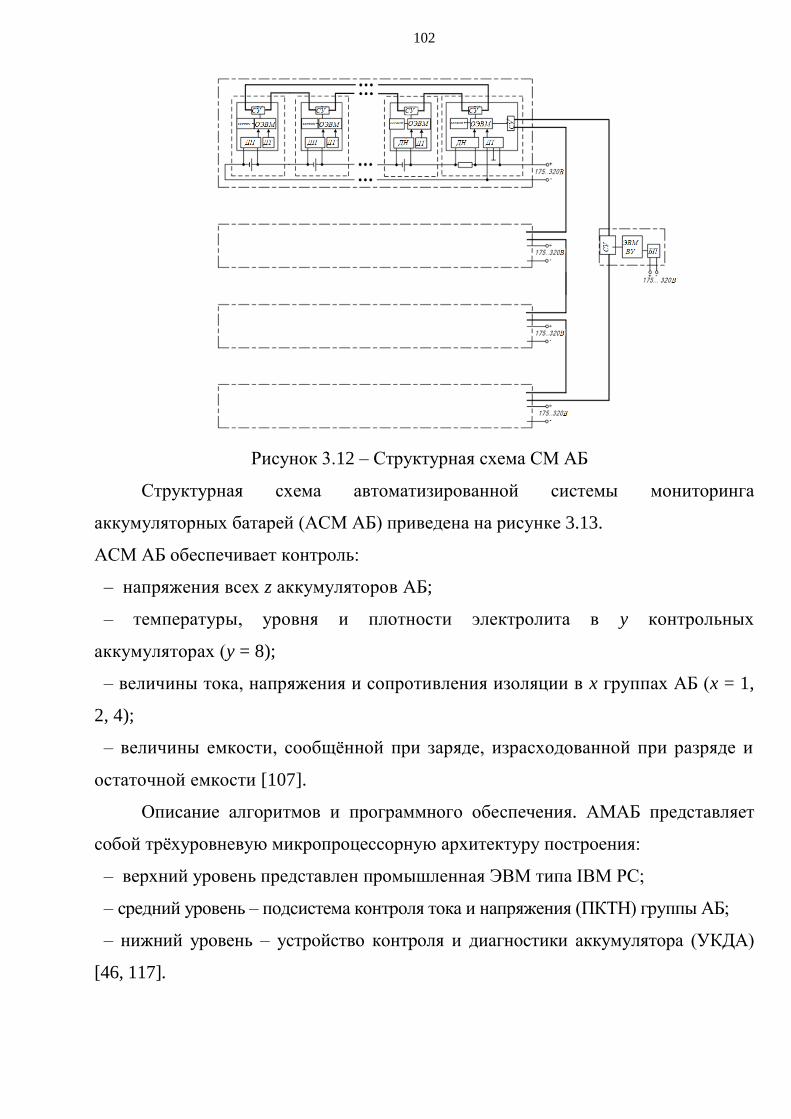
102
Рисунок 3.12 – Структурная схема СМ АБ
Структурная схема автоматизированной системы мониторинга
аккумуляторных батарей (АСМ АБ) приведена на рисунке 3.13.
АСМ АБ обеспечивает контроль:
– напряжения всех z аккумуляторов АБ;
– температуры, уровня и плотности электролита в y контрольных
аккумуляторах (y = 8);
– величины тока, напряжения и сопротивления изоляции в x группах АБ (x = 1,
2, 4);
– величины емкости, сообщённой при заряде, израсходованной при разряде и
остаточной емкости [107].
Описание алгоритмов и программного обеспечения. АМАБ представляет
собой трёхуровневую микропроцессорную архитектуру построения:
– верхний уровень представлен промышленная ЭВМ типа IBM PC;
– средний уровень – подсистема контроля тока и напряжения (ПКТН) группы АБ;
– нижний уровень – устройство контроля и диагностики аккумулятора (УКДА)
[46, 117].
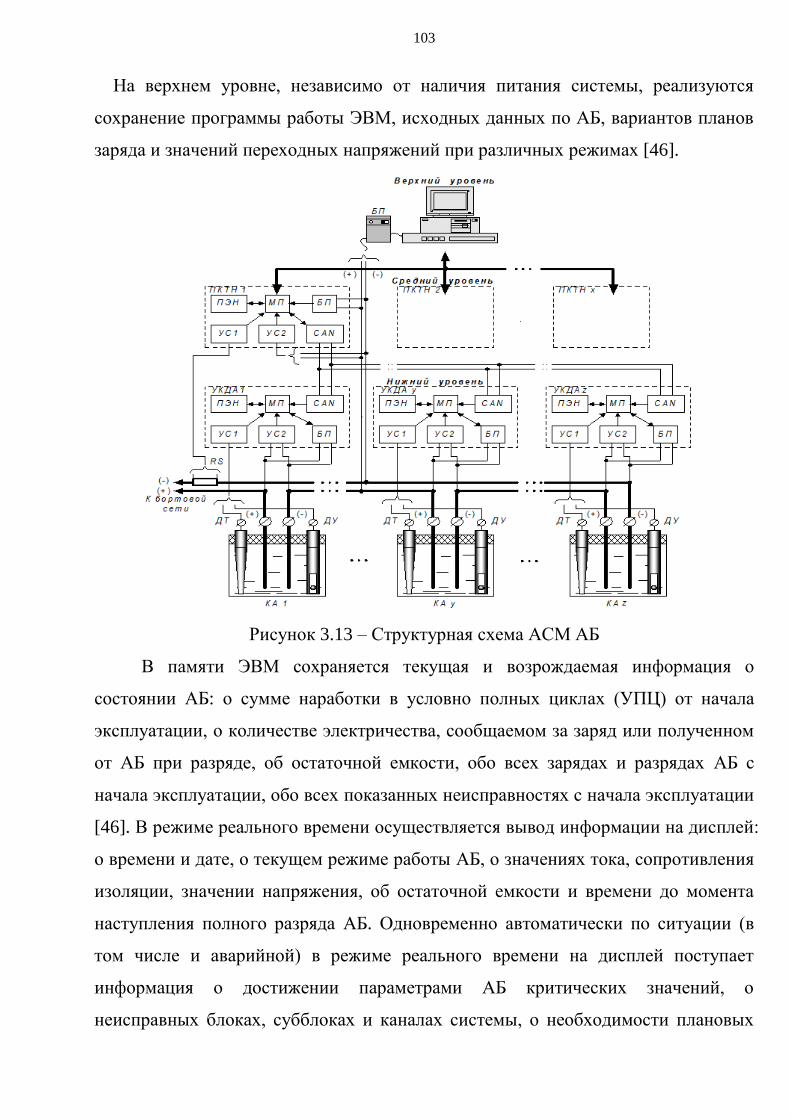
103
На верхнем уровне, независимо от наличия питания системы, реализуются
сохранение программы работы ЭВМ, исходных данных по АБ, вариантов планов
заряда и значений переходных напряжений при различных режимах [46].
Рисунок 3.13 – Структурная схема АСМ АБ
В памяти ЭВМ сохраняется текущая и возрождаемая информация о
состоянии АБ: о сумме наработки в условно полных циклах (УПЦ) от начала
эксплуатации, о количестве электричества, сообщаемом за заряд или полученном
от АБ при разряде, об остаточной емкости, обо всех зарядах и разрядах АБ с
начала эксплуатации, обо всех показанных неисправностях с начала эксплуатации
[46]. В режиме реального времени осуществляется вывод информации на дисплей:
о времени и дате, о текущем режиме работы АБ, о значениях тока, сопротивления
изоляции, значении напряжения, об остаточной емкости и времени до момента
наступления полного разряда АБ. Одновременно автоматически по ситуации (в
том числе и аварийной) в режиме реального времени на дисплей поступает
информация о достижении параметрами АБ критических значений, о
неисправных блоках, субблоках и каналах системы, о необходимости плановых
104
мероприятий, перехода на следующую ступень заряда, окончания заряда или
разряда, отклонении параметров от планируемых значений. По запросу оператора
на экран выводится информации о номерах АБ с максимальным отклонением
параметров от средних значений, гистограммы текущих значений параметров и др.
В аварийной ситуации предусмотрена звуковая и световая сигнализация [122].
В состав АСМ АБ может входить до четырёх ПКТН (средний уровень) в
зависимости от числа групп аккумуляторов.
ПКТН включает в себя субблок микроконтроллера (МП);
энергонезависимую память EEPROM (ПЭН); устройства согласующие (УС1, УС2),
предназначенные для согласования сигналов датчиков тока ДТ и напряжения
группы ДН; высокоскоростной CAN-трансивер, который обеспечивает интерфейс
между CAN-протоколом контроллера и физической шиной и предназначен для
межуровнего обмена информацией; блок питания (БП). В целях дальнейшего
развития системы на среднем уровне можно предусмотреть промышленный
компьютер [46, 122].
На среднем уровне ПКТН реализует: прием сигналов от измерительных
устройств, определяя параметры АБ сообщённые за заряд или полученные от АБ
на момент контроля; прием сигналов и команд от верхнего уровня; передачу
сигналов на верхний уровень; тестовый самоконтроль работоспособности систем
контроля параметров; появление неисправных субблоков или измерительных
каналов по отклонению измерительных или тестовых сигналов за допустимые значения.
В состав АСК АБ может входить до ста двадцати шести УКДА (нижний
уровень) в зависимости от числа аккумуляторов.
УКДА имеет такую же структуру как ПКТН.
На нижнем уровне УКДА выполняет: прием сигналов от измерительных
устройств, определяя, температуру электролита, уровень и напряжение АБ; прием
сигналов и команд от верхнего уровня (через ПКТН); передачу сигналов на
верхний уровень. Кроме того, УКДА осуществляет косвенное определение
плотности электролита; перерасчёт плотности на номинальный уровень
электролита и температуру 30С; определение наработки в УПЦ и суммирование
УПЦ от начала эксплуатации АБ; определение остаточной емкости (Ач) на
момент контроля с учётом выполнения предшествующей и последующей частей
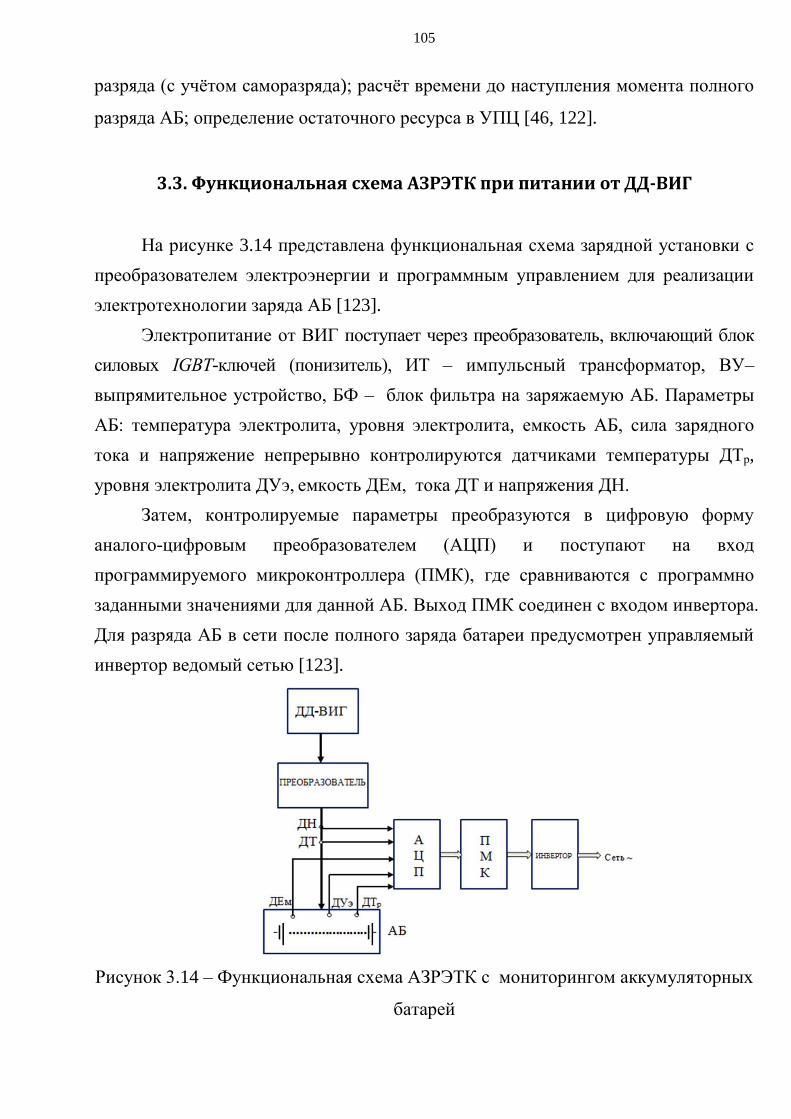
105
разряда (с учётом саморазряда); расчёт времени до наступления момента полного
разряда АБ; определение остаточного ресурса в УПЦ [46, 122].
3.3. Функциональная схема АЗРЭТК при питании от ДД-ВИГ
На рисунке 3.14 представлена функциональная схема зарядной установки с
преобразователем электроэнергии и программным управлением для реализации
электротехнологии заряда АБ [123].
Электропитание от ВИГ поступает через преобразователь, включающий блок
силовых IGВТ-ключей (понизитель), ИТ – импульсный трансформатор, ВУ–
выпрямительное устройство, БФ – блок фильтра на заряжаемую АБ. Параметры
АБ: температура электролита, уровня электролита, емкость АБ, сила зарядного
тока и напряжение непрерывно контролируются датчиками температуры ДТр,
уровня электролита ДУэ, емкость ДЕм, тока ДТ и напряжения ДН.
Затем, контролируемые параметры преобразуются в цифровую форму
аналого-цифровым преобразователем (АЦП) и поступают на вход
программируемого микроконтроллера (ПМК), где сравниваются с программно
заданными значениями для данной АБ. Выход ПМК соединен с входом инвертора.
Для разряда АБ в сети после полного заряда батареи предусмотрен управляемый
инвертор ведомый сетью [123].
Рисунок 3.14 – Функциональная схема АЗРЭТК с мониторингом аккумуляторных
батарей
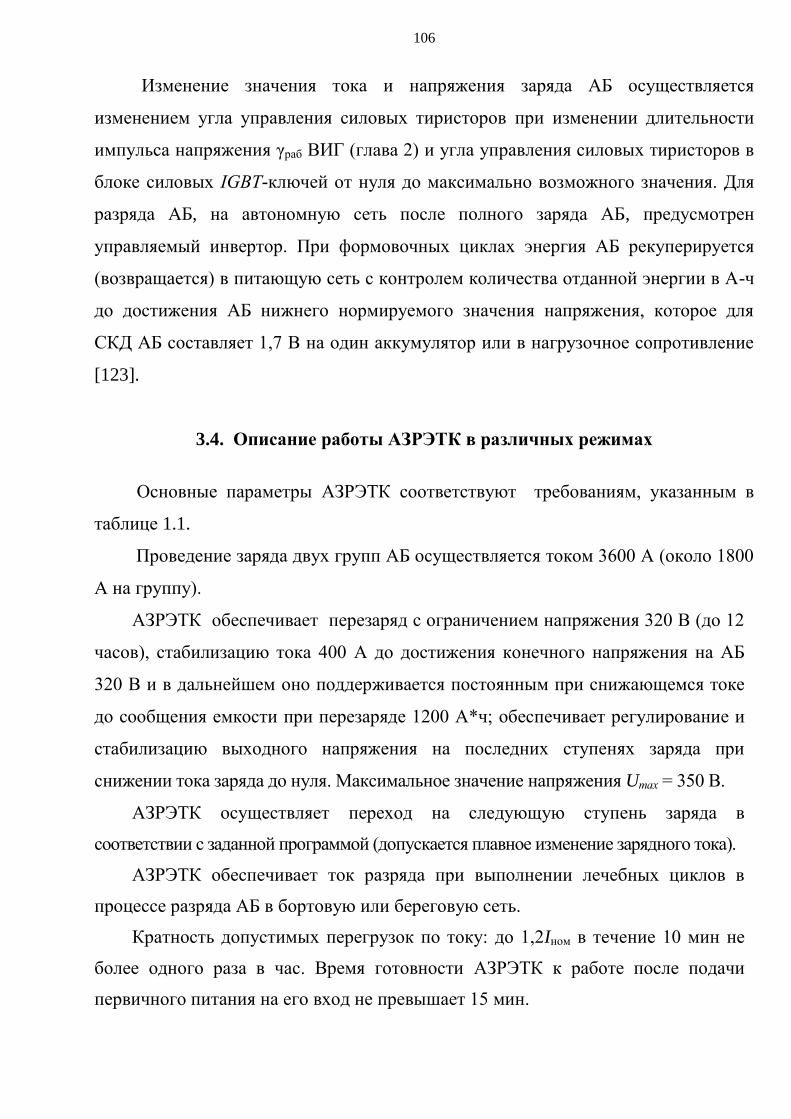
106
Изменение значения тока и напряжения заряда АБ осуществляется
изменением угла управления силовых тиристоров при изменении длительности
импульса напряжения γраб ВИГ (глава 2) и угла управления силовых тиристоров в
блоке силовых IGВТ-ключей от нуля до максимально возможного значения. Для
разряда АБ, на автономную сеть после полного заряда АБ, предусмотрен
управляемый инвертор. При формовочных циклах энергия АБ рекуперируется
(возвращается) в питающую сеть с контролем количества отданной энергии в А-ч
до достижения АБ нижнего нормируемого значения напряжения, которое для
СКД АБ составляет 1,7 В на один аккумулятор или в нагрузочное сопротивление
[123].
3.4. Описание работы АЗРЭТК в различных режимах
Основные параметры АЗРЭТК соответствуют требованиям, указанным в
таблице 1.1.
Проведение заряда двух групп АБ осуществляется током 3600 А (около 1800
А на группу).
АЗРЭТК обеспечивает перезаряд с ограничением напряжения 320 В (до 12
часов), стабилизацию тока 400 А до достижения конечного напряжения на АБ
320 В и в дальнейшем оно поддерживается постоянным при снижающемся токе
до сообщения емкости при перезаряде 1200 А*ч; обеспечивает регулирование и
стабилизацию выходного напряжения на последних ступенях заряда при
снижении тока заряда до нуля. Максимальное значение напряжения Umах = 350 В.
АЗРЭТК осуществляет переход на следующую ступень заряда в
соответствии с заданной программой (допускается плавное изменение зарядного тока).
АЗРЭТК обеспечивает ток разряда при выполнении лечебных циклов в
процессе разряда АБ в бортовую или береговую сеть.
Кратность допустимых перегрузок по току: до 1,2Iном в течение 10 мин не
более одного раза в час. Время готовности АЗРЭТК к работе после подачи
первичного питания на его вход не превышает 15 мин.
107
Исчезновение напряжения питания, недопустимые отклонения параметров
(показателей качества) электроэнергии питающей сети или АБ от значений
приводят к аварии АЗРЭТК. Для безаварийного отключения применяются
собственные средства защиты.
АЗРЭТК имеет местное ручное управление, входы для подключения
дистанционного автоматического управления из централизованной системы
управления (ЦСУ) и дистанционную сигнализацию посредством «сухих»
контактов. Перевод АЗРЭТК из режима местного управления на дистанционное
осуществляется с помощью переключателя. Переключатель вида управления
(местное, дистанционное) размещен на лицевой панели ЗРУ, при этом
обеспечивается блокировка всех функций альтернативного вида управления,
кроме останова устройства.
При местном управлении обеспечивается:
задание режима работы АЗРЭТК;
включение с выдачей заданных режимом значений напряжения и тока;
отключение.
На лицевой панели АЗРЭТК находится световая сигнализация:
о наличии сети собственных нужд;
о наличии сети постоянного тока со стороны АБ;
о режиме работы АЗРЭТК;
о срабатывании каждого вида защиты;
о режиме управления (дистанционный, местный);
об отсутствии сигнала из ЦСУ при дистанционном управлении.
Текущий режим работы отражается на цифровом индикаторе.
Дистанционное управление АЗРЭТК осуществляется в цифровом коде по
каналу CAN. Перечень и характеристики сигналов информационного обмена
определен согласованным протоколом взаимодействия между заинтересованными
организациями.
АЗРЭТК имеет соединитель, позволяющий принимать сигналы
дистанционного управления и передавать сигналы о состоянии в ЦСУ.
108
“Сухие” контакты сигнализации рассчитаны на параметры коммутируемого
тока (0,01 – 0,25) А и напряжения (6 – 36) В при активной нагрузке или (0,01 –
0,15) А и напряжения (6 – 36) В при индуктивной нагрузке . АЗРЭТК выдает
следующие дистанционные сигналы посредством «сухих» контактов [114]:
о работе устройства – «работа»;
о неисправности устройства (обобщенный);
АЗРЭТК обеспечивает редактирование и хранение до 8 программ заряда,
разряда, и возможность регистрации емкости (А-часов) заряда и разряда.
Информация о режиме сохраняется при обесточивании питающей сети.
В состав АЗРЭТК входят щитовые измерительные приборы контроля
выходного тока и напряжения, а также напряжения питающей сети.
Электрическое сопротивление изоляции токоведущих цепей относительно
корпуса и цепей, электрически не связанных между собой, согласно ГОСТ
18142.1.
Описание и работа изделия
АЗРЭТК содержит функционально законченные основные составные части:
– зарядно-разрядное устройство (ЗРУ)
– нагрузочное устройство (НУ)
– комплект щитов.
3.5. Расчет и выбор элементов и устройств низковольтной части
зарядно-разрядного комплекса
Расчет и выбор транзистора:
Исходя из технических данных и предложенных на рынке транзисторов на
мощность 1,15 МВт для блока понизителя ЗРК (рисунок 3.15) был выбраны
транзисторы фирмы EUPEC FZ3600R17KE3 [50, 84], его параметры даны в табл
3.1.
Управление транзистором FZ3600R17KE3 будет производиться через
драйвер EiceDRIVER™ 2ED300C17-S (VGE= 15 В).
109
Рисунок 3.15 – Внешний вид блока понизителя мощного ЗРК
Рисунок 3.16 – Внешний вид
EUPEC FZ3600R17KE3
Рисунок 3.17 – Электрическая
схема EUPEC FZ3600R17KE3
Были произведены расчёты количества тепла, выделяемого в одном блоке
понизителя с помощью, которых было определено необходимое количество
транзисторов.
Исходя из графика представленного на рис. 3.18 при VGE = 15 В, Ic = 1200 А
(4 транзистора параллельно при общем токе 3600 А и коэффициенте заполнения,
равном 0,8 (с запасом)) выясняем, что падение напряжение коллектор – эмиттер
будет составлять порядка 1,45 В округлим до 1,5 В.
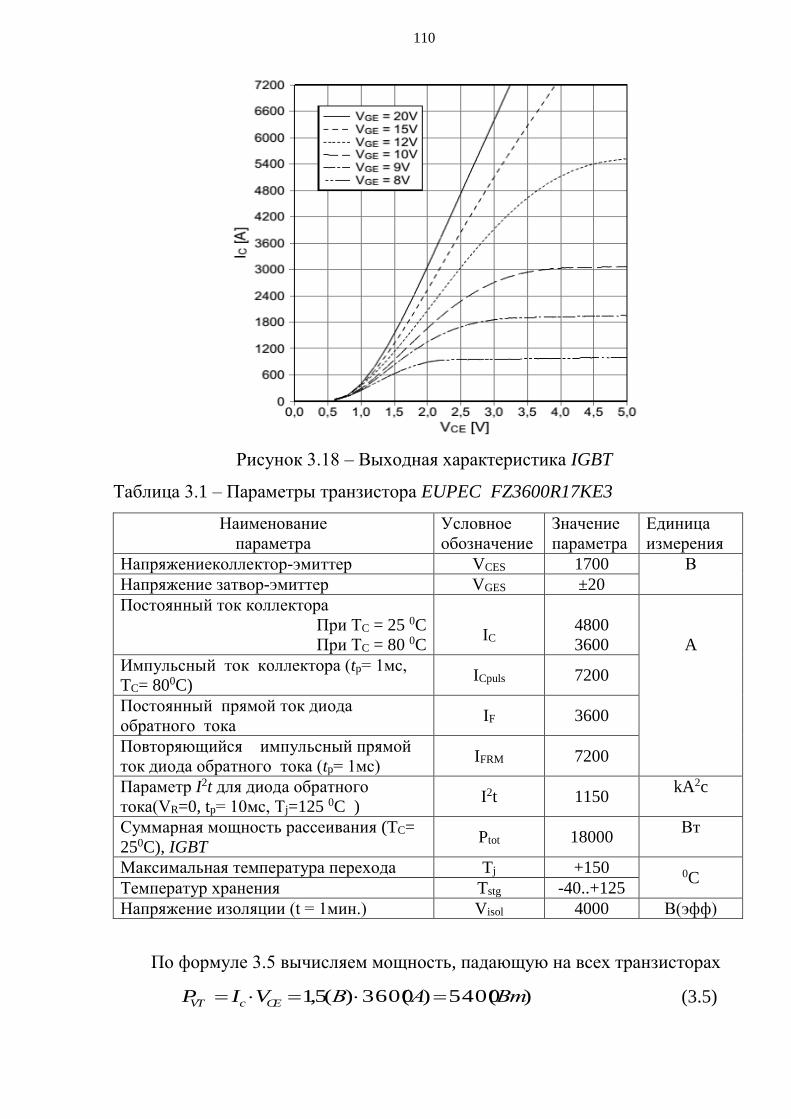
110
Рисунок 3.18 – Выходная характеристика IGBT
Таблица 3.1 – Параметры транзистора EUPEC FZ3600R17KE3
Наименование
параметра
Условное
обозначение
Значение
параметра
Единица
измерения
Напряжениеколлектор-эмиттер VCES 1700 В
Напряжение затвор-эмиттер VGES ±20
Постоянный ток коллектора
При TC = 25 0C
При TC = 80 0C
IC
4800
3600
A
Импульсный ток коллектора (tp= 1мс,
TC= 800C) ICpuls 7200
Постоянный прямой ток диода
обратного тока IF 3600
Повторяющийся импульсный прямой
ток диода обратного тока (tp= 1мс) IFRM 7200
Параметр I2t для диода обратного
тока(VR=0, tp= 10мс, Tj=125 0C ) I2t 1150
kA2c
Суммарная мощность рассеивания (TC=
250C), IGBT Ptot 18000
Вт
Максимальная температура перехода Tj +150 0C Температур хранения Tstg -40..+125
Напряжение изоляции (t = 1мин.) Visol 4000 В(эфф)
По формуле 3.5 вычисляем мощность, падающую на всех транзисторах
)(5400)(3600)(5,1 ВтАВVIP CEcVT (3.5)
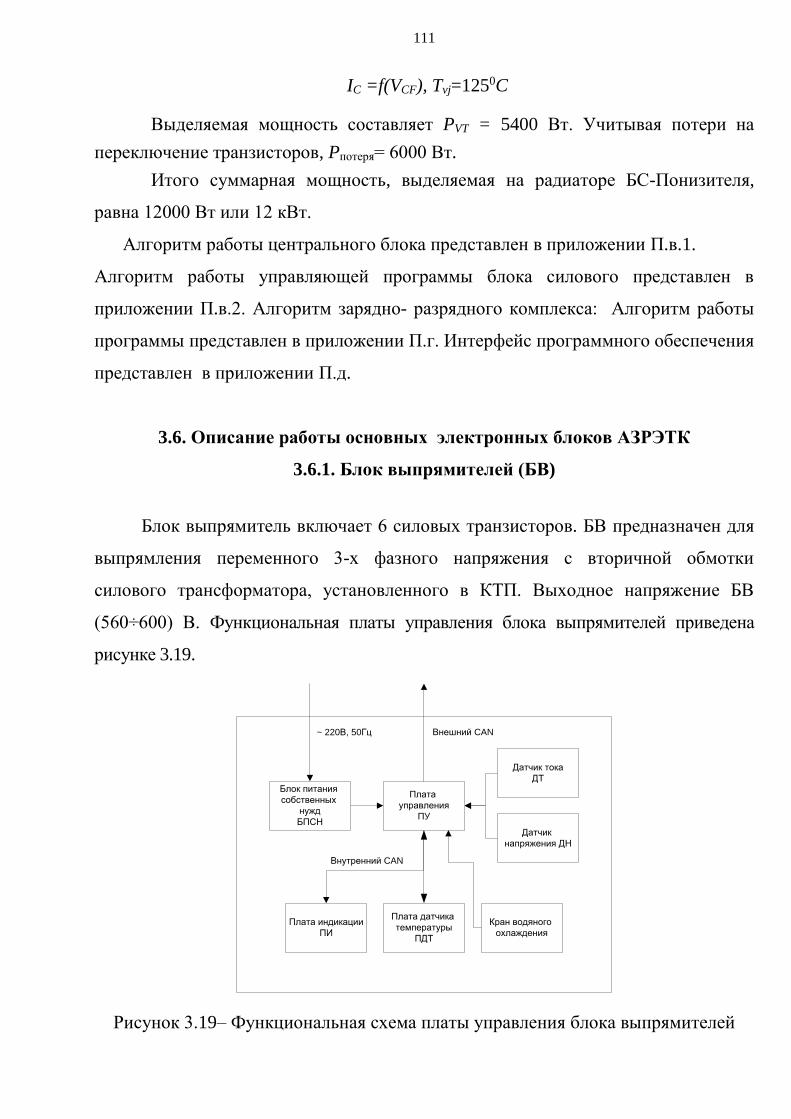
111
IC =f(VCF), Tvj=1250C
Выделяемая мощность составляет PVT = 5400 Вт. Учитывая потери на
переключение транзисторов, Pпотеря= 6000 Вт.
Итого суммарная мощность, выделяемая на радиаторе БС-Понизителя,
равна 12000 Вт или 12 кВт.
Алгоритм работы центрального блока представлен в приложении П.в.1.
Алгоритм работы управляющей программы блока силового представлен в
приложении П.в.2. Алгоритм зарядно- разрядного комплекса: Алгоритм работы
программы представлен в приложении П.г. Интерфейс программного обеспечения
представлен в приложении П.д.
3.6. Описание работы основных электронных блоков АЗРЭТК
3.6.1. Блок выпрямителей (БВ)
Блок выпрямитель включает 6 силовых транзисторов. БВ предназначен для
выпрямления переменного 3-х фазного напряжения с вторичной обмотки
силового трансформатора, установленного в КТП. Выходное напряжение БВ
(560÷600) В. Функциональная платы управления блока выпрямителей приведена
рисунке 3.19.
Блок питания
собственных
нужд
БПСН
Плата
управления
ПУ
Датчик тока
ДТ
Датчик
напряжения ДН
Плата индикации
ПИ
Плата датчика
температуры
ПДТ
Кран водяного
охлаждения
~ 220В, 50Гц Внешний CAN
Внутренний CAN
Рисунок 3.19– Функциональная схема платы управления блока выпрямителей
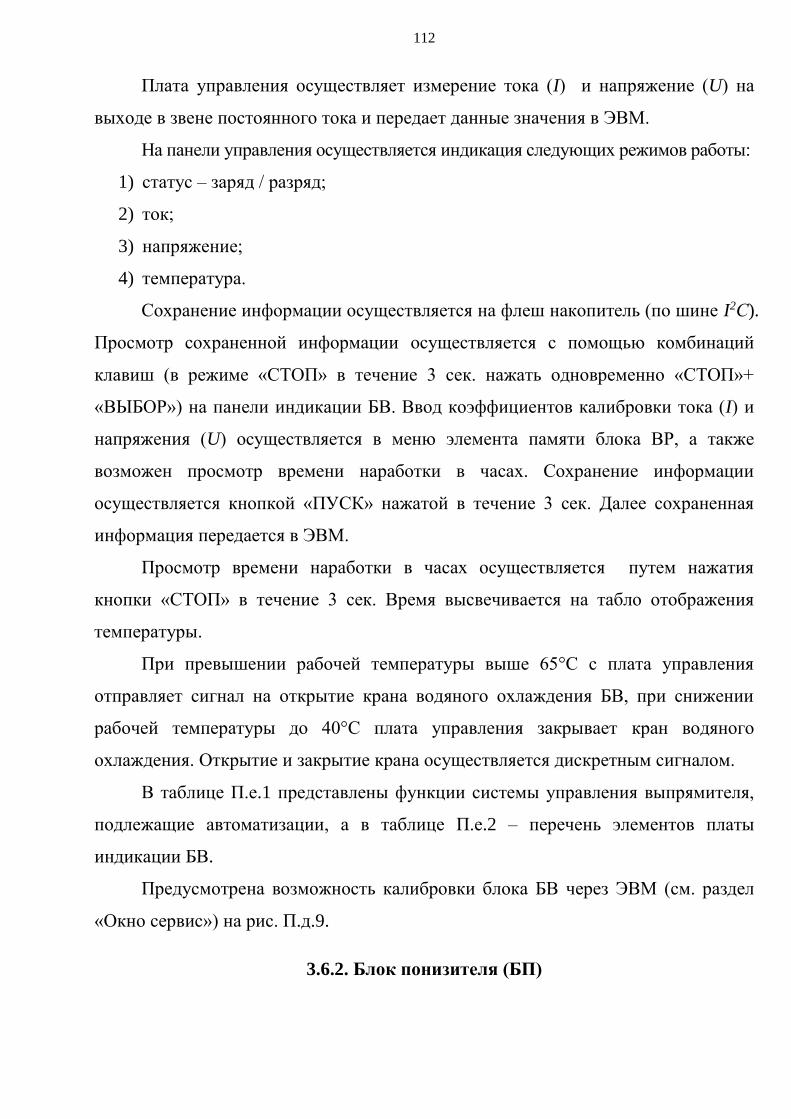
112
Плата управления осуществляет измерение тока (I) и напряжение (U) на
выходе в звене постоянного тока и передает данные значения в ЭВМ.
На панели управления осуществляется индикация следующих режимов работы:
1) статус – заряд / разряд;
2) ток;
3) напряжение;
4) температура.
Сохранение информации осуществляется на флеш накопитель (по шине I2С).
Просмотр сохраненной информации осуществляется с помощью комбинаций
клавиш (в режиме «СТОП» в течение 3 сек. нажать одновременно «СТОП»+
«ВЫБОР») на панели индикации БВ. Ввод коэффициентов калибровки тока (I) и
напряжения (U) осуществляется в меню элемента памяти блока ВР, а также
возможен просмотр времени наработки в часах. Сохранение информации
осуществляется кнопкой «ПУСК» нажатой в течение 3 сек. Далее сохраненная
информация передается в ЭВМ.
Просмотр времени наработки в часах осуществляется путем нажатия
кнопки «СТОП» в течение 3 сек. Время высвечивается на табло отображения
температуры.
При превышении рабочей температуры выше 65°С с плата управления
отправляет сигнал на открытие крана водяного охлаждения БВ, при снижении
рабочей температуры до 40°С плата управления закрывает кран водяного
охлаждения. Открытие и закрытие крана осуществляется дискретным сигналом.
В таблице П.е.1 представлены функции системы управления выпрямителя,
подлежащие автоматизации, а в таблице П.е.2 – перечень элементов платы
индикации БВ.
Предусмотрена возможность калибровки блока БВ через ЭВМ (см. раздел
«Окно сервис») на рис. П.д.9.
3.6.2. Блок понизителя (БП)
113
БП предназначен для регулирования и стабилизации на заданном уровне
тока/напряжения при заряде АБ. Блок понизителя включает 4 силовые
транзисторы. Вход БП подключается к выходу блока выпрямителя (при питании
от бегеговой сети) или к выходу согласующего преобразователя (при питании от
ДД-ВИГ).
По сигналу от шкафа ЭВМ через внешний CAN, контроллер блока
понизителя получает команду на заряд, а так же данные о токе и/или напряжении.
После команды пуск, контроллер коммутируя силовые транзисторы с частотой
ШИМ 1 кГц, начинает стабилизировать ток и/или напряжения на выходе.
Блок понизителя аварийно должен выключаться при следующих условиях:
1) при превышении токов через транзисторы;
2) перегрев;
3) неисправность одного и более транзисторов;
4) напряжения питания драйверов ниже 4,5В;
5) выходное напряжение блока понизителя отличается от заданного
напряжения более чем на ±10%;
6) выходной ток блока понизителя отличается от заданного тока более чем
на ±10%.
При переполюсовке батареи блок понизителя не запускается, о чем
уведомляет оператора через шкаф ЭВМ.
Если температура радиатора выросла более 65°С, то контроллер отправляет
команду на открытие задвижки для охлаждения и закрывает ее при температуре 45°С.
Все данные о напряжении, температуре, токе, а также о статусе и ошибках
БП через внешний CAN передает в шкаф ЭВМ. Шкаф ЭВМ осуществляет
информирование оператора, записи в отчет и отражение на мнемосхеме.
Выходные параметры (ток и напряжение) могут задаваться как с панели
местного управления, так и с ЭВМ в режиме «стоп» и «пуск».
Схема системы управления блока понизителя представлена на рисунке 3.20
Блок понизителя предназначен для зарядки аккумуляторных батарей.
Номинальный выходной ток может регулироваться в диапазоне 0 ÷ 3600 А,
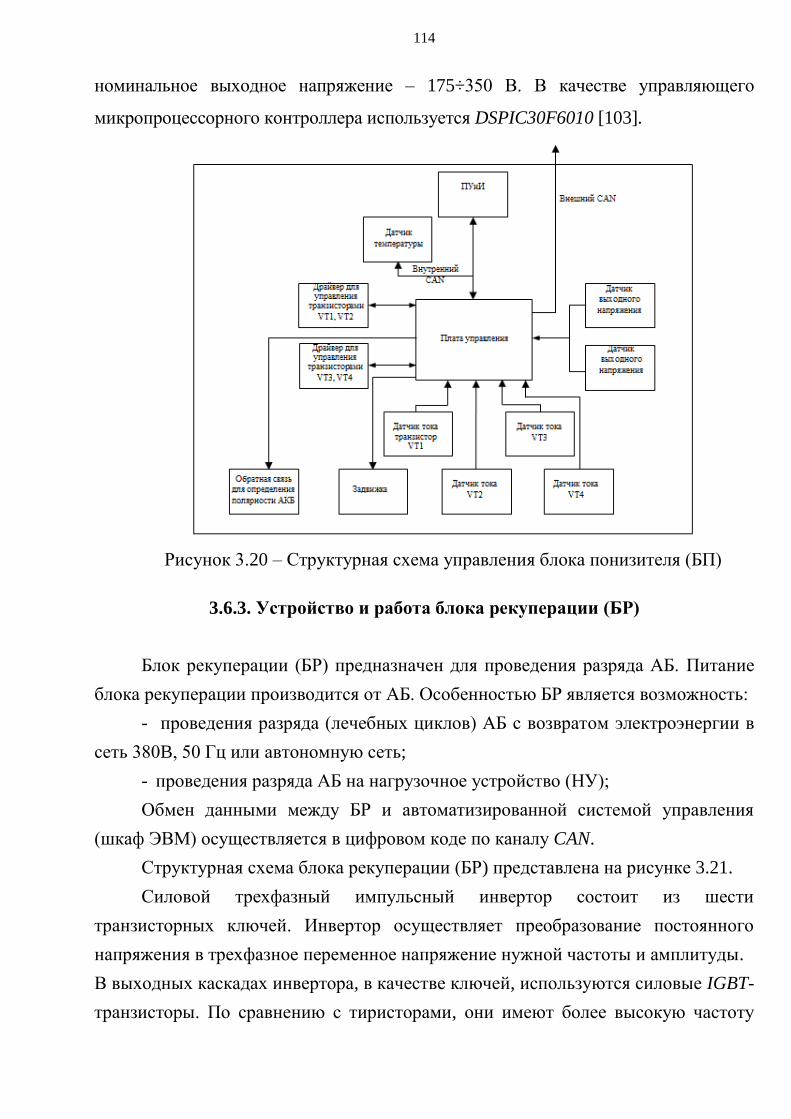
114
номинальное выходное напряжение – 175÷350 В. В качестве управляющего
микропроцессорного контроллера используется DSPIC30F6010 [103].
Рисунок 3.20 – Структурная схема управления блока понизителя (БП)
3.6.3. Устройство и работа блока рекуперации (БР)
Блок рекуперации (БР) предназначен для проведения разряда АБ. Питание
блока рекуперации производится от АБ. Особенностью БР является возможность:
- проведения разряда (лечебных циклов) АБ с возвратом электроэнергии в
сеть 380B, 50 Гц или автономную сеть;
- проведения разряда АБ на нагрузочное устройство (НУ);
Обмен данными между БР и автоматизированной системой управления
(шкаф ЭВМ) осуществляется в цифровом коде по каналу CAN.
Структурная схема блока рекуперации (БР) представлена на рисунке 3.21.
Силовой трехфазный импульсный инвертор состоит из шести
транзисторных ключей. Инвертор осуществляет преобразование постоянного
напряжения в трехфазное переменное напряжение нужной частоты и амплитуды.
В выходных каскадах инвертора, в качестве ключей, используются силовые IGBT-
транзисторы. По сравнению с тиристорами, они имеют более высокую частоту

115
переключения, что позволяет вырабатывать выходной сигнал синусоидальной
формы с минимальными искажениями [65].
Рисунок 3.21 – Структурная схема блока рекуперации
Здесь VT1…VT6 – IGBT транзисторы, установленные на радиаторе;
драйверы VT1…VT6 – управление силовыми ключами; ДН2, ДН3, ДН4 – датчик
напряжения; датчики тока ДТ и напряжения ДН1 в силовом канале служат для
контроля, регулирования и измерения электрических параметров блока, а
также служат для защиты от токов перегрузки и короткого замыкания,
недопустимых отклонений напряжения.
Разряд АБ в режиме рекуперации.
По сигналу от шкафа ЭВМ через внешний CAN, контроллер платы
управления получает команду на разряд АБ в режиме рекуперации, а также
данные о разрядном токе. После команды «ПУСК» начинается коммутация
силовых транзисторов VT1…VT6 посредством ШИМ-сигнала с платы драйвера.
На выходе БР формируется импульсное синусоидальное трехфазное напряжение
116
и происходит возврат разрядной энергии в сеть 10/6 кВ или автономным
потребителям. Амплитудой синусоиды происходит регулирование тока разряда АБ.
Плата датчиков напряжения измеряет напряжение на выходе БР для
отслеживания перехода фазы через ноль и автоматической синхронизации с сетью
[65].
Разряд АБ на НУ.
По сигналу от шкафа ЭВМ через внешний CAN, контроллер платы
управления получает команду разряд АБ на НУ, а так же данные о разрядном токе.
После команды «ПУСК» начинается коммутация силовых транзисторов VT1, VT3,
VT5 посредством ШИМ-сигнала с платы драйвера. Транзисторы VT2, VT4, VT6
должны быть закрыты. Шириной импульса ШИМ- сигнала регулируется ток
разряда. Плата датчиков напряжения и тока измеряет ток разряда АБ и
напряжение на входе [65].
На входе БР (инвертор) установлен емкостной накопитель С1 (puc.3.22),
который выполняет роль накопителя энергии при пропадании входного
напряжения и сглаживает пульсации напряжения.
Для предупреждения глубокого разряда на входе блока рекуператора
измеряется напряжение и если оно приближается к значению 1,8 В на
аккумулятор, то выдается соответствующее предупреждение на экран шкафа
ЭВМ [65].
В таблице П.е.5 приведено обозначение выводов платы индикации БР, в
таблице П.е.6 – назначение портов процессора для платы управления блоком
рекуператора, в таблице П.е.7– назначения портов процессора для платы датчиков
напряжения и тока для блока рекуператора.
3.7. Моделирование режимов работы АЗРЭТК
Математическое моделирование АЗРЭТК осуществляется в программе
Matlab/Simulink [26, 27, 65], рисунок 3.22.
Ток на выходе генератора ВИГ [18] через блок силовых IGВТ- ключей и
импульсный трансформатор Т проходит фильтр LC и осуществляет заряд АБ [65].
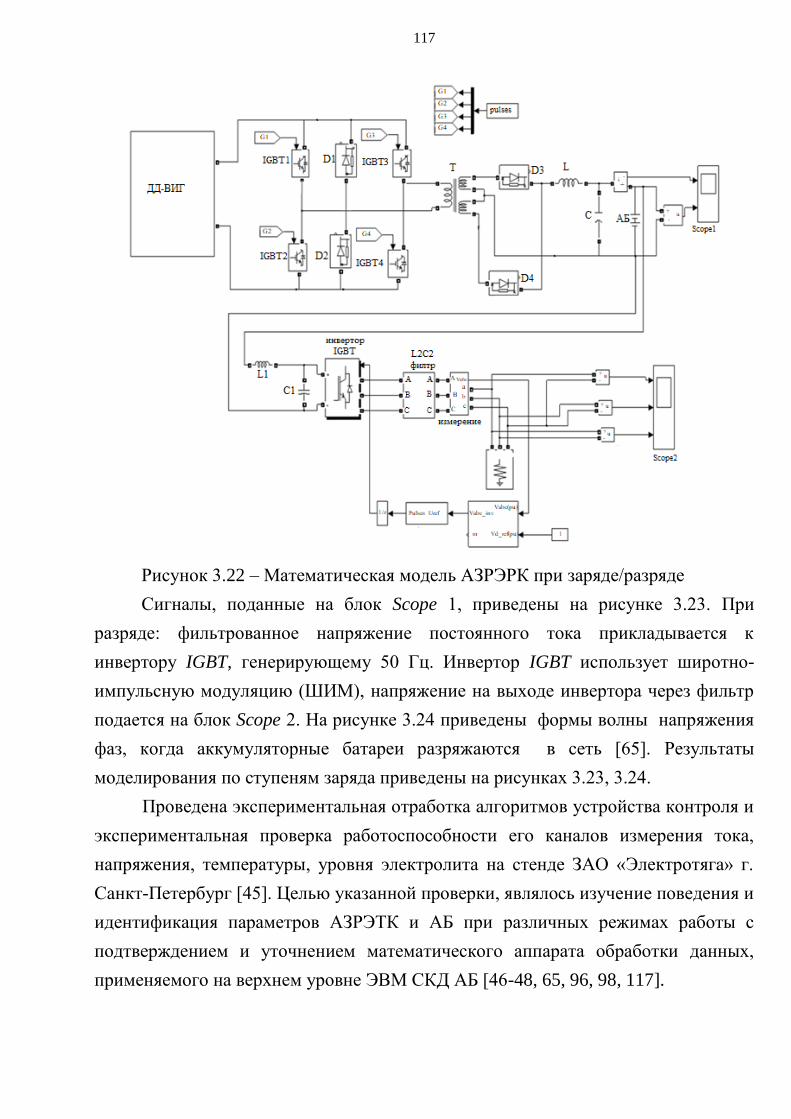
117
Рисунок 3.22 – Математическая модель АЗРЭРК при заряде/разряде
Сигналы, поданные на блок Scope 1, приведены на рисунке 3.23. При
разряде: фильтрованное напряжение постоянного тока прикладывается к
инвертору IGBT, генерирующему 50 Гц. Инвертор IGBT использует широтно-
импульсную модуляцию (ШИМ), напряжение на выходе инвертора через фильтр
подается на блок Scope 2. На рисунке 3.24 приведены формы волны напряжения
фаз, когда аккумуляторные батареи разряжаются в сеть [65]. Результаты
моделирования по ступеням заряда приведены на рисунках 3.23, 3.24.
Проведена экспериментальная отработка алгоритмов устройства контроля и
экспериментальная проверка работоспособности его каналов измерения тока,
напряжения, температуры, уровня электролита на стенде ЗАО «Электротяга» г.
Санкт-Петербург [45]. Целью указанной проверки, являлось изучение поведения и
идентификация параметров АЗРЭТК и АБ при различных режимах работы с
подтверждением и уточнением математического аппарата обработки данных,
применяемого на верхнем уровне ЭВМ СКД АБ [46-48, 65, 96, 98, 117].
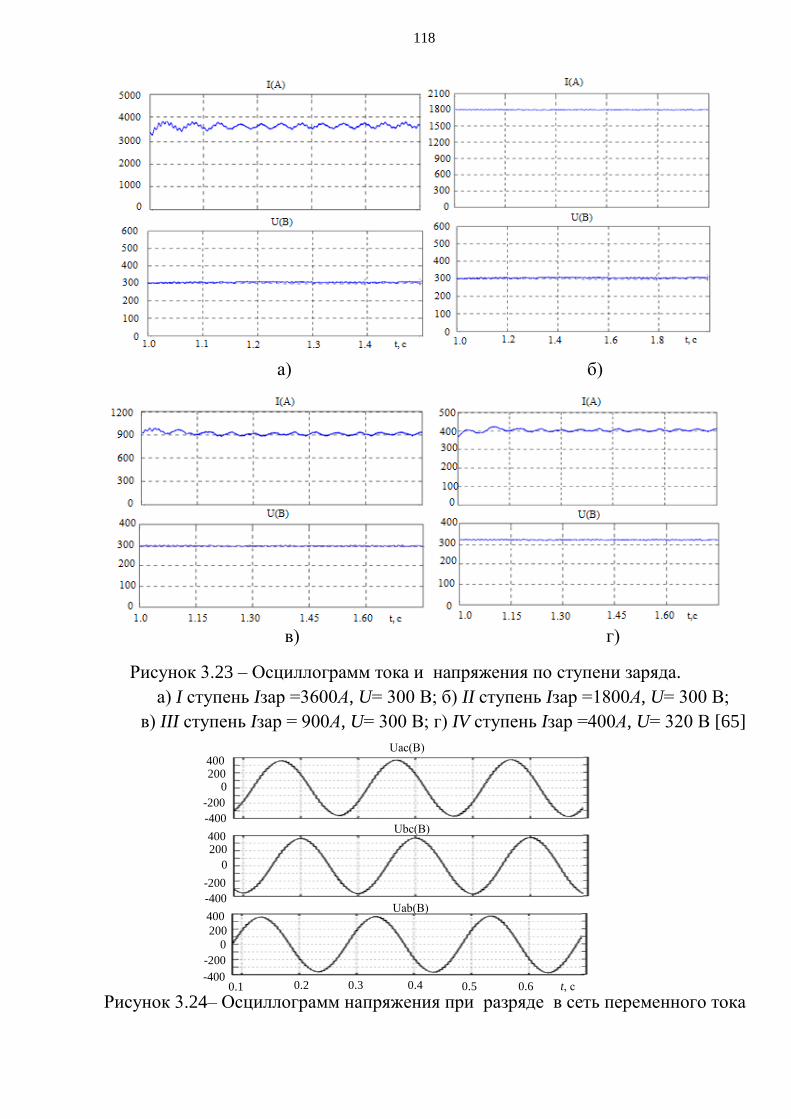
118
Uac(В)
Ubc(В)
Uab(В)
0
200
400
400
200
-200
0
400
200
0
-200
-400
-400
-200
-400
0.1 0.2 0.3 0.4 0.5 0.6 t, с
Рисунок 3.23 – Осциллограмм тока и напряжения по ступени заряда.
а) I ступень Iзар =3600А, U= 300 В; б) II ступень Iзар =1800А, U= 300 В;
в) III ступень Iзар = 900А, U= 300 В; г) IV ступень Iзар =400А, U= 320 В [65]
Рисунок 3.24– Осциллограмм напряжения при разряде в сеть переменного тока
а) б)
в) г)
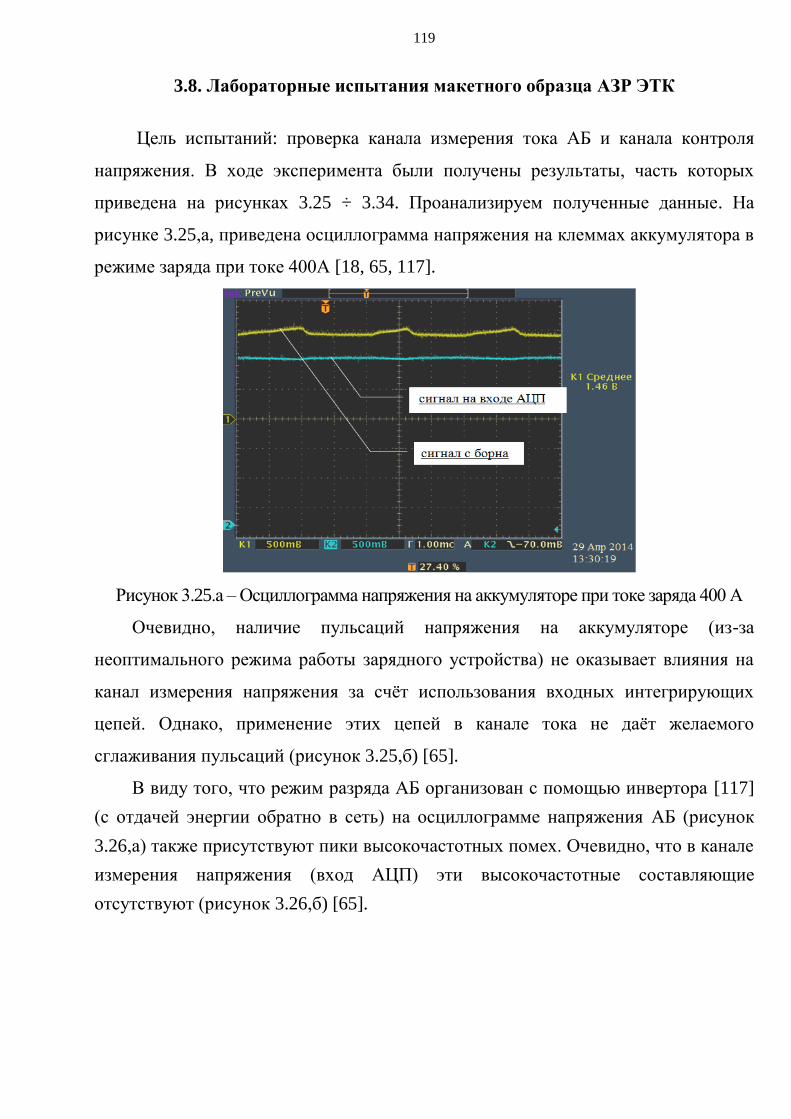
119
3.8. Лабораторные испытания макетного образца АЗР ЭТК
Цель испытаний: проверка канала измерения тока АБ и канала контроля
напряжения. В ходе эксперимента были получены результаты, часть которых
приведена на рисунках 3.25 ÷ 3.34. Проанализируем полученные данные. На
рисунке 3.25,а, приведена осциллограмма напряжения на клеммах аккумулятора в
режиме заряда при токе 400А [18, 65, 117].
Рисунок 3.25.а – Осциллограмма напряжения на аккумуляторе при токе заряда 400 А
Очевидно, наличие пульсаций напряжения на аккумуляторе (из-за
неоптимального режима работы зарядного устройства) не оказывает влияния на
канал измерения напряжения за счёт использования входных интегрирующих
цепей. Однако, применение этих цепей в канале тока не даёт желаемого
сглаживания пульсаций (рисунок 3.25,б) [65].
В виду того, что режим разряда АБ организован с помощью инвертора [117]
(с отдачей энергии обратно в сеть) на осциллограмме напряжения АБ (рисунок
3.26,а) также присутствуют пики высокочастотных помех. Очевидно, что в канале
измерения напряжения (вход АЦП) эти высокочастотные составляющие
отсутствуют (рисунок 3.26,б) [65].
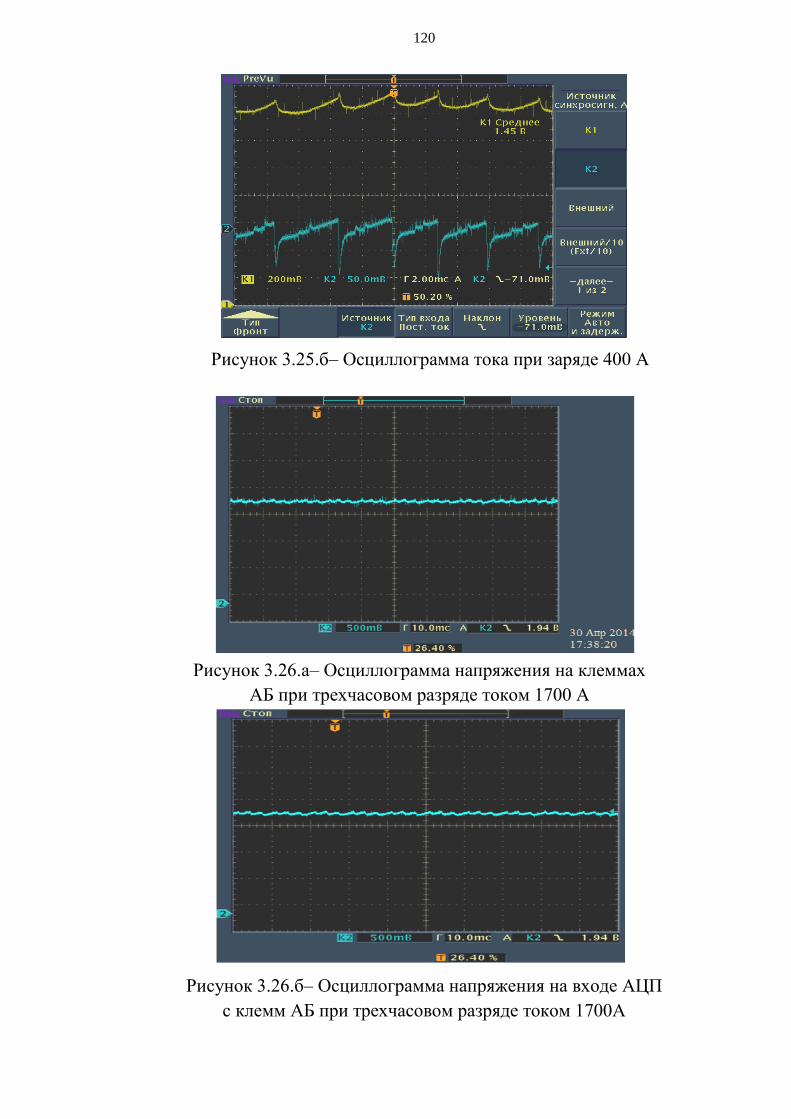
120
Рисунок 3.25.б– Осциллограмма тока при заряде 400 А
Рисунок 3.26.а– Осциллограмма напряжения на клеммах
АБ при трехчасовом разряде током 1700 А
Рисунок 3.26.б– Осциллограмма напряжения на входе АЦП
с клемм АБ при трехчасовом разряде током 1700А
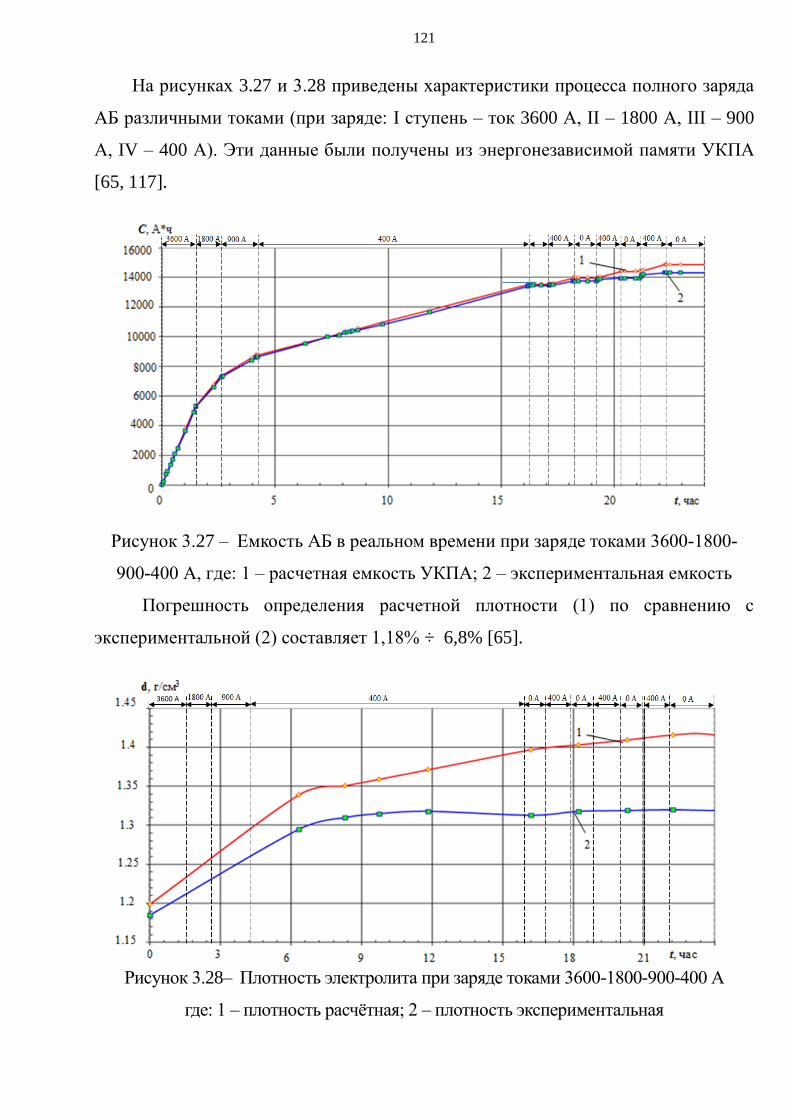
121
На рисунках 3.27 и 3.28 приведены характеристики процесса полного заряда
АБ различными токами (при заряде: I ступень – ток 3600 А, II – 1800 А, III – 900
А, IV – 400 А). Эти данные были получены из энергонезависимой памяти УКПА
[65, 117].
Рисунок 3.27 – Емкость АБ в реальном времени при заряде токами 3600-1800-
900-400 А, где: 1 – расчетная емкость УКПА; 2 – экспериментальная емкость
Погрешность определения расчетной плотности (1) по сравнению с
экспериментальной (2) составляет 1,18% ÷ 6,8% [65].
Рисунок 3.28– Плотность электролита при заряде токами 3600-1800-900-400 А
где: 1 – плотность расчётная; 2 – плотность экспериментальная
3600 A
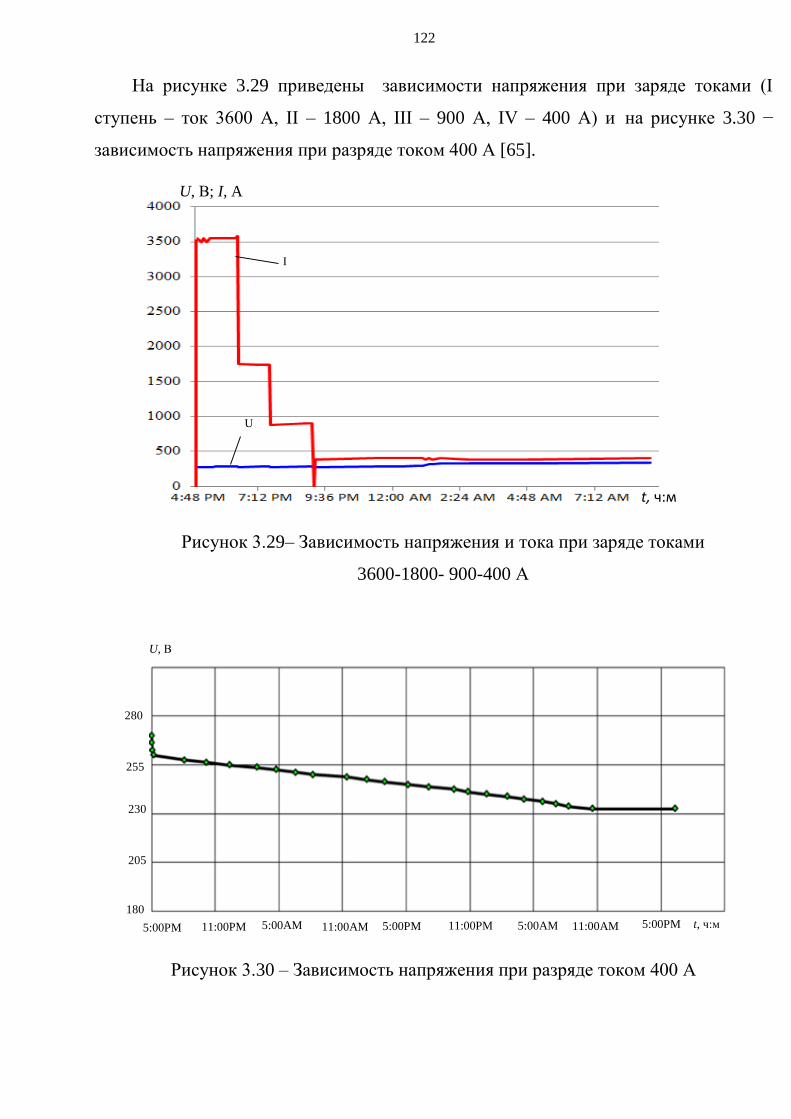
122
На рисунке 3.29 приведены зависимости напряжения при заряде токами (I
ступень – ток 3600 А, II – 1800 А, III – 900 А, IV – 400 А) и на рисунке 3.30 −
зависимость напряжения при разряде током 400 А [65].
Рисунок 3.29– Зависимость напряжения и тока при заряде токами
3600-1800- 900-400 А
Рисунок 3.30 – Зависимость напряжения при разряде током 400 А
U, В
t, ч:м
180
205
230
255
280
5:00PM 11:00PM 5:00AM 11:00AM 5:00PM 11:00PM 5:00AM 11:00AM 5:00PM
U
I
U, В; I, A
t, ч:м
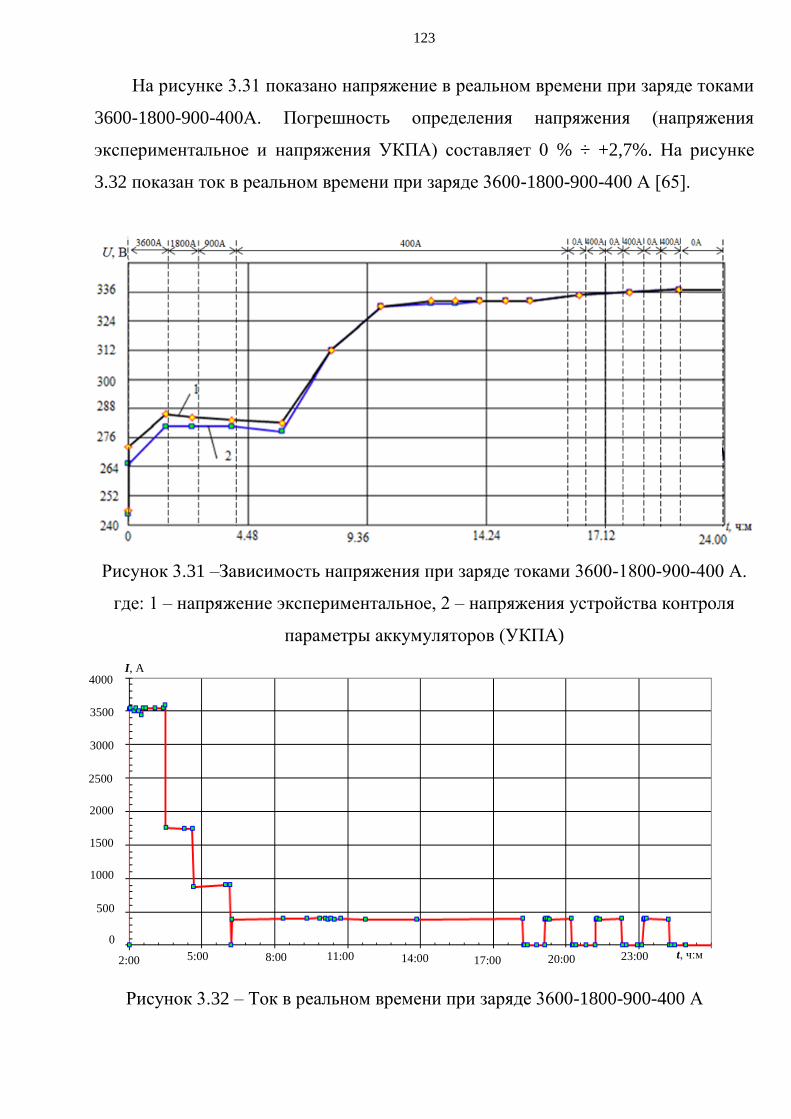
123
На рисунке 3.31 показано напряжение в реальном времени при заряде токами
3600-1800-900-400А. Погрешность определения напряжения (напряжения
экспериментальное и напряжения УКПА) составляет 0 % ÷ +2,7%. На рисунке
3.32 показан ток в реальном времени при заряде 3600-1800-900-400 А [65].
Рисунок 3.31 –Зависимость напряжения при заряде токами 3600-1800-900-400 А.
где: 1 – напряжение экспериментальное, 2 – напряжения устройства контроля
параметры аккумуляторов (УКПА)
0
500
1000
1500
2000
3000
4000
2500
3500
2:00 5:00 8:00 11:00 14:00 17:00 20:00 23:00 t, ч:м
I, A
Рисунок 3.32 – Ток в реальном времени при заряде 3600-1800-900-400 А
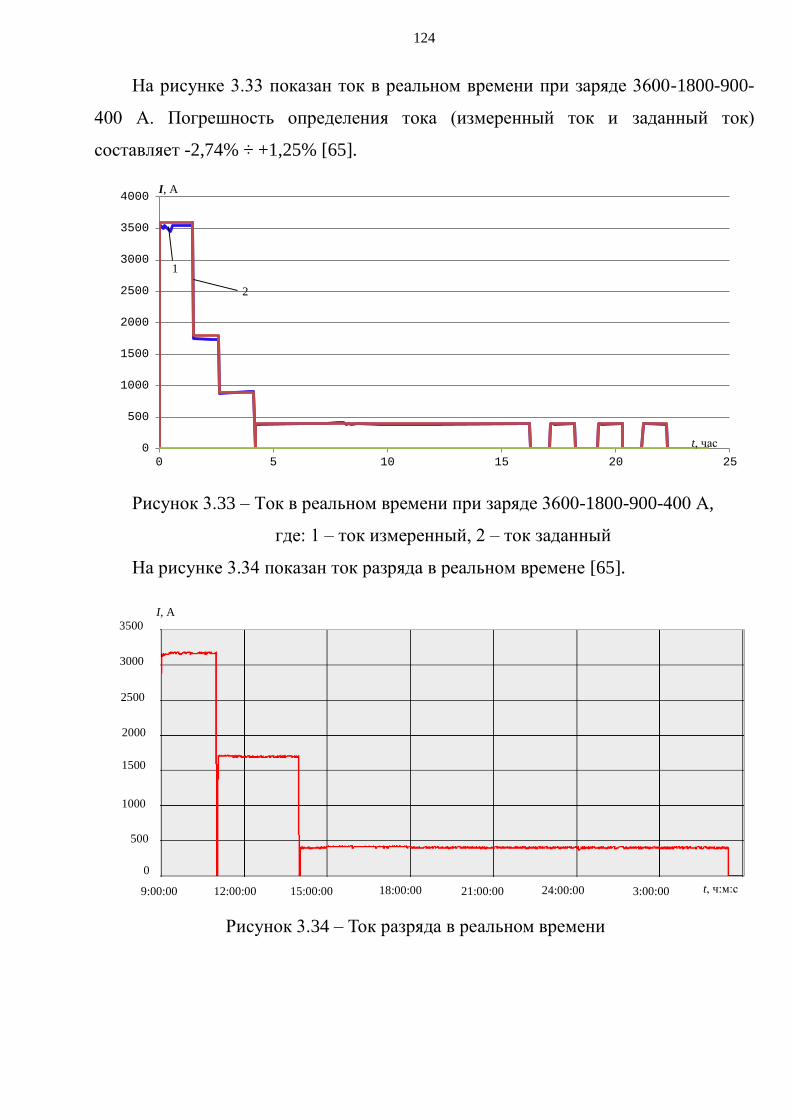
124
На рисунке 3.33 показан ток в реальном времени при заряде 3600-1800-900-
400 А. Погрешность определения тока (измеренный ток и заданный ток)
составляет -2,74% ÷ +1,25% [65].
Рисунок 3.33 – Ток в реальном времени при заряде 3600-1800-900-400 А,
где: 1 – ток измеренный, 2 – ток заданный
На рисунке 3.34 показан ток разряда в реальном времене [65].
Рисунок 3.34 – Ток разряда в реальном времени
I, A
t, ч:м:с 9:00:00 12:00:00 15:00:00 18:00:00 21:00:00 24:00:00 3:00:00
0
1000
2000
3000
500
1500
2500
3500
I, A
0
500
1000
1500
2000
2500
3000
3500
4000
0 5 10 15 20 25
t, час
1
2
I, A
125
Выводы по главе 3
1. Представлен расчет и выбор элементов и устройств зарядно-разрядного
комплекса. Предложен алгоритм программного управления автономным зарядно-
разрядным электротехническим комплексом, и разработана система его
автоматизации с выбором соответствующих аппаратных и программных средств.
2. Разработана многоуровневая система мониторинга АБ, ее состав,
алгоритмы и программы работы основных блоков.
4. Представлена функциональная схема блока понизителя и блока
рекуперации, обеспечивающего экономию электроэнергии в сети напряжения
переменного тока (восполнение электроэнергии для питания потребителей,
подключенных к этой сети) [6, 65].
5. Разработана компьютерная модель АЗРЭТК и получены результаты
математического моделирования АЗРЭТК в программе Matlab/Simulink по ступени
заряда - разряда АКБ.
6. Проведен цикл теоретических исследований и сравнение с результатами
экспериментальных исследований для апробации эффективных алгоритмов
режимов заряда-разряда и регенерации аккумуляторных батарей.
7. Проведено экспериментальное исследование режимов заряда-разряда
АЗРЭТК: при комплексном контроле напряжения на аккумуляторах, токов заряда,
разряда, зависимостей напряжения при заряде и разряде, емкости, плотности
электролита в реальном времени.
8. Исследования показали, что при напряжения в реальном времени при
заряде токами 3600-1800-900-400 А, погрешность определения напряжения
составляет 0 % ÷ +2,7%. Погрешность определения тока (измеренный ток и
заданный ток) составляет -2,74% ÷ +1,25%, что соответствует заданным
требованиям. Погрешность расчета плотности составляет 1,18% ÷ 6,8%.
9. Комплексный контроль параметров: напряжения, тока, температуры
электролита, емкости, плотности электролита АБ обеспечивает высокую
достоверность информации о состоянии АБ в процессе эксплуатации,
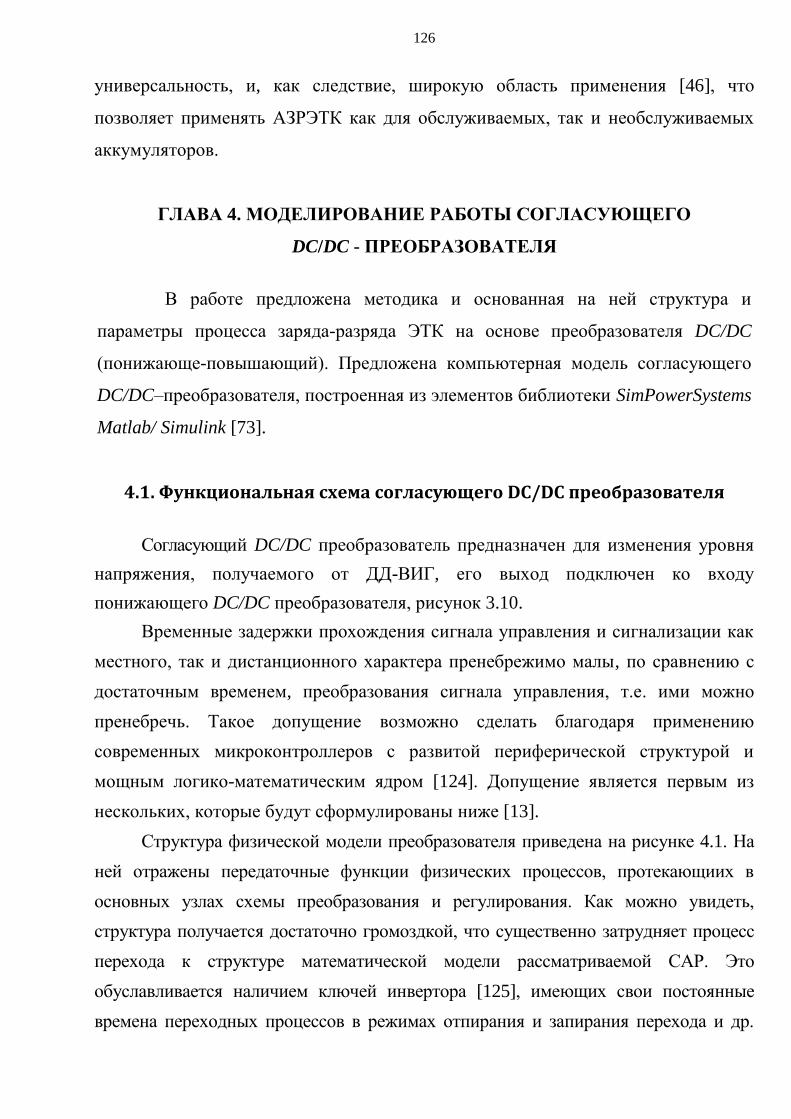
126
универсальность, и, как следствие, широкую область применения [46], что
позволяет применять АЗРЭТК как для обслуживаемых, так и необслуживаемых
аккумуляторов.
ГЛАВА 4. МОДЕЛИРОВАНИЕ РАБОТЫ СОГЛАСУЮЩЕГО
DC/DC - ПРЕОБРАЗОВАТЕЛЯ
В работе предложена методика и основанная на ней структура и
параметры процесса заряда-разряда ЭТК на основе преобразователя DC/DC
(понижающе-повышающий). Предложена компьютерная модель согласующего
DC/DC–преобразователя, построенная из элементов библиотеки SimPowerSystems
Matlab/ Simulink [73].
4.1. Функциональная схема согласующего DC/DC преобразователя
Согласующий DC/DC преобразователь предназначен для изменения уровня
напряжения, получаемого от ДД-ВИГ, его выход подключен ко входу
понижающего DC/DC преобразователя, рисунок 3.10.
Временные задержки прохождения сигнала управления и сигнализации как
местного, так и дистанционного характера пренебрежимо малы, по сравнению с
достаточным временем, преобразования сигнала управления, т.е. ими можно
пренебречь. Такое допущение возможно сделать благодаря применению
современных микроконтроллеров с развитой периферической структурой и
мощным логико-математическим ядром [124]. Допущение является первым из
нескольких, которые будут сформулированы ниже [13].
Структура физической модели преобразователя приведена на рисунке 4.1. На
ней отражены передаточные функции физических процессов, протекающиих в
основных узлах схемы преобразования и регулирования. Как можно увидеть,
структура получается достаточно громоздкой, что существенно затрудняет процесс
перехода к структуре математической модели рассматриваемой САР. Это
обуславливается наличием ключей инвертора [125], имеющих свои постоянные
времена переходных процессов в режимах отпирания и запирания перехода и др.
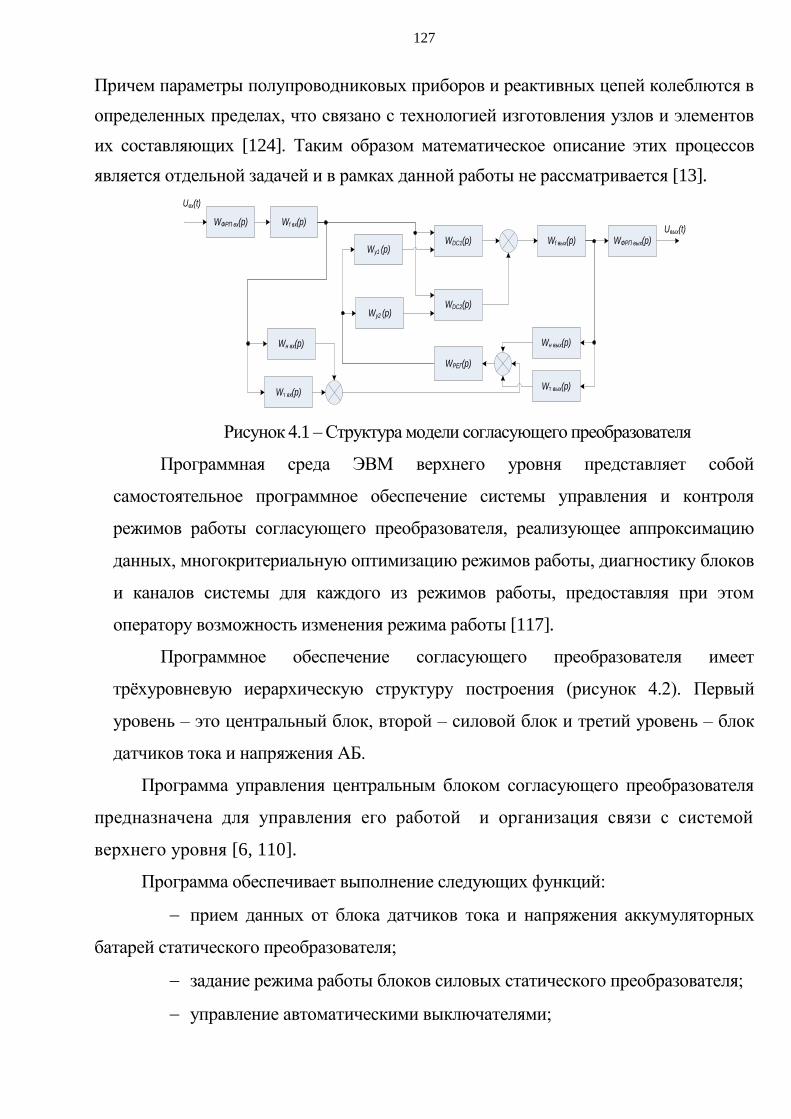
127
Причем параметры полупроводниковых приборов и реактивных цепей колеблются в
определенных пределах, что связано с технологией изготовления узлов и элементов
их составляющих [124]. Таким образом математическое описание этих процессов
является отдельной задачей и в рамках данной работы не рассматривается [13].
Wн вх(p) Wн вых(p)
WDC1(p) Wf вых(p)
WФРП вх(p)
Wт вх(p)Wт вых(p)
Uвх(t)
WРЕГ(p)
Uвых(t)Wf вх(p)
WDC2(p)
WФРП вых(p)
Wу2 (p)
Wу1 (p)
Рисунок 4.1 – Структура модели согласующего преобразователя
Программная среда ЭВМ верхнего уровня представляет собой
самостоятельное программное обеспечение системы управления и контроля
режимов работы согласующего преобразователя, реализующее аппроксимацию
данных, многокритериальную оптимизацию режимов работы, диагностику блоков
и каналов системы для каждого из режимов работы, предоставляя при этом
оператору возможность изменения режима работы [117].
Программное обеспечение согласующего преобразователя имеет
трёхуровневую иерархическую структуру построения (рисунок 4.2). Первый
уровень – это центральный блок, второй – силовой блок и третий уровень – блок
датчиков тока и напряжения АБ.
Программа управления центральным блоком согласующего преобразователя
предназначена для управления его работой и организация связи с системой
верхнего уровня [6, 110].
Программа обеспечивает выполнение следующих функций:
прием данных от блока датчиков тока и напряжения аккумуляторных
батарей статического преобразователя;
задание режима работы блоков силовых статического преобразователя;
управление автоматическими выключателями;
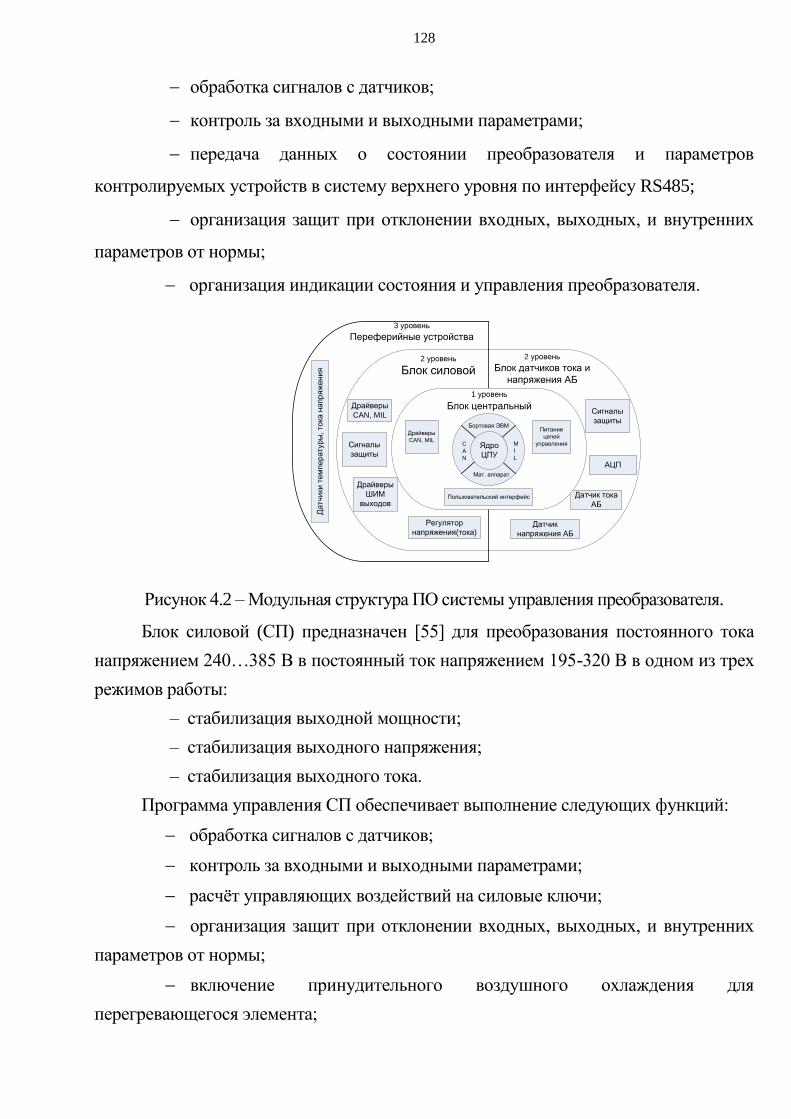
128
обработка сигналов с датчиков;
контроль за входными и выходными параметрами;
передача данных о состоянии преобразователя и параметров
контролируемых устройств в систему верхнего уровня по интерфейсу RS485;
организация защит при отклонении входных, выходных, и внутренних
параметров от нормы;
организация индикации состояния и управления преобразователя.
Датчик тока
АБ
Датчик
напряжения АБ
Да
тчи
ки т
ем
пе
ра
тур
ы,
тока
на
пр
яж
ени
я
1 уровень Блок центральный
Пользовательский интерфейс
Драйверы
CAN, MIL
Бортовая ЭВМ
Мат. аппарат
C
A
N
M
I
L
Ядро
ЦПУ
Питание
цепей
управления
2 уровень
Блок датчиков тока и
напряжения АБ
2 уровень
Блок силовой
Драйверы
CAN, MIL
Драйверы
ШИМ
выходов
АЦП
Сигналы
защиты
Сигналы
защиты
Регулятор
напряжения(тока)
3 уровень
Переферийные устройства
Рисунок 4.2 – Модульная структура ПО системы управления преобразователя.
Блок силовой (СП) предназначен [55] для преобразования постоянного тока
напряжением 240…385 В в постоянный ток напряжением 195-320 В в одном из трех
режимов работы:
– стабилизация выходной мощности;
– стабилизация выходного напряжения;
– стабилизация выходного тока.
Программа управления СП обеспечивает выполнение следующих функций:
обработка сигналов с датчиков;
контроль за входными и выходными параметрами;
расчёт управляющих воздействий на силовые ключи;
организация защит при отклонении входных, выходных, и внутренних
параметров от нормы;
включение принудительного воздушного охлаждения для
перегревающегося элемента;
129
организация индикации состояния и управления преобразователем.
Блок датчиков тока и напряжения АБ управляется собственной программой
управления, которая предназначена [95] для предварительной обработки и передачи
информации с датчиков тока и напряжения АБ, а также для управления источником
вторичного электропитания.
Программа обеспечивает выполнение следующих функций:
обработка сигналов с датчиков;
контроль за входными и выходными параметрами;
расчёт управляющих воздействий на силовые ключи;
передача данных по интерфейсу CAN 2.0 в устройство верхнего уровня.
4.2. Выбор структурной схемы центрального блока
Структурная схема центрального блока управления, рисунок 4.3, в самом
общем виде должна содержать следующие функциональные узлы:
питание СБ24В
управления выключателями В1- В8Выходы дистанционного
БП
БП
175...320В
175...320Восновное питание
резервное питаниеуправления
ФИКП БП 175...320В
ФИКП БП сигналы
БЗ
ПМУ
Последовательный канал пультомсвязи RS-485
для внешнего управления
CAN - интерфейс
с силовыми блокамидля информационного обмена
БУ
5В
Канал обмена с
Рисунок 4.3 – Структурная схема центрального блока
блок управления (БУ), осуществляющий прием и обработку команд
«Вкл.», «Откл.», «Режим работы» с пульта местного управления. Обмен
управляющими, задающими и информационными сигналами с СУТС по
согласующему интерфейсу. Контроль входных и выходных параметров,
формирование команд управления для силовых блоков, формирование сигналов
130
управления блоком защит;
пульт местного управления (ПМУ), служит для отображения состояния
как центрального блока, так и шести силовых блоков, позволяет задавать режим
работы и осуществлять управление преобразователем.
4.3. Выбор структурной схемы силового блока
Основной частью DC/DC согласующего преобразователя является силовой
блок.
Структурная схема силового блока в общем виде содержит следующие
функциональные узлы [30]:
входной фильтр радиопомех (ФРП), снижающий уровень радиопомех,
излучаемых преобразователем по цепям питания;
устройство плавного заряда, предназначенное для исключения ударных
токов заряда буферных электролитических емкостей, установленных на входе
преобразователя, во время первоначального подключения блока;
выходной фильтр радиопомех (ФРП);
фильтр ИКП (ФИКП), обеспечивающий защиту преобразователя от
импульсных коммутационных перенапряжений экспоненциальной формы на
фидерах постоянного тока, связывающих преобразователь с энергосистемой;
узел измерения температуры, обеспечивающий измерение температуры
наиболее нагретой части радиатора, и передачу измеренного значения для анализа
в микроконтроллер;
узел охлаждения, предназначенный для дополнительного охлаждения
силового блока по сигналам управления от микроконтроллера;
микроконтроллер, осуществляющий управление силовыми ключами
преобразователя по заданию от центрального блока;
узел индикации, осуществляющий вывод требуемых параметров работы
силового блока, а также вывод информации о режиме работы согласующего
преобразователя;
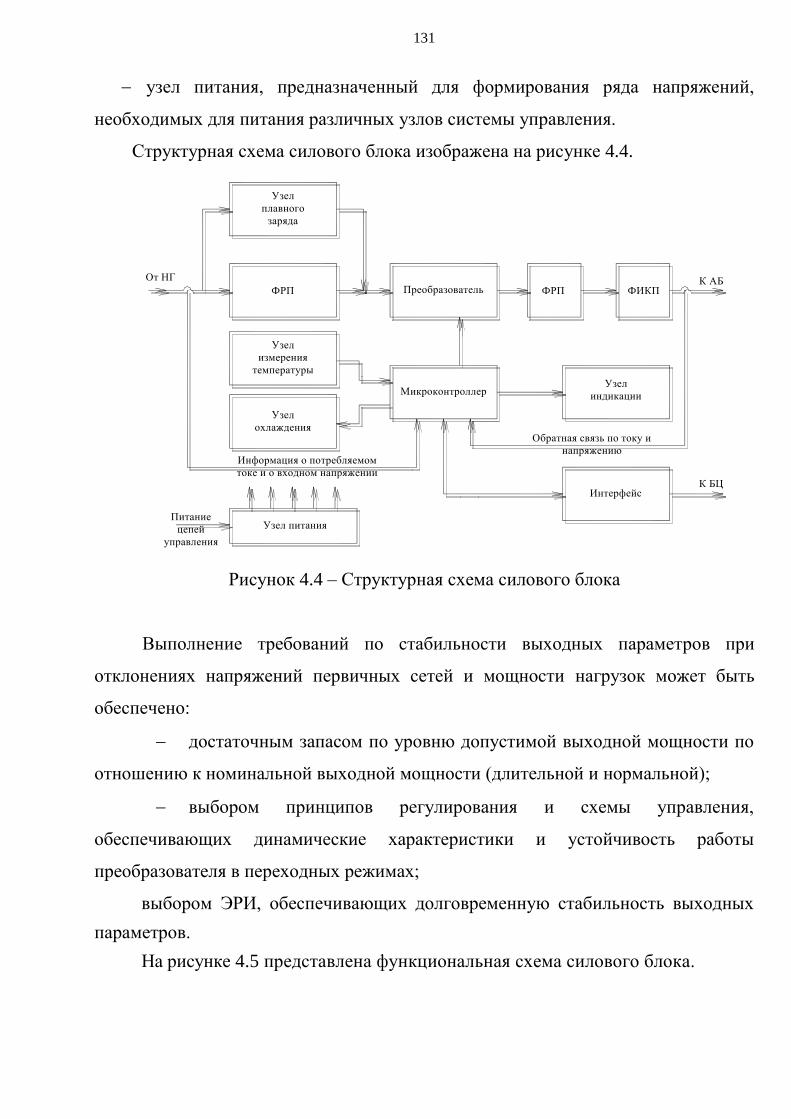
131
узел питания, предназначенный для формирования ряда напряжений,
необходимых для питания различных узлов системы управления.
Структурная схема силового блока изображена на рисунке 4.4.
Обратная связь по току и
напряжению
ФИКП
Узел
охлаждения
Узел питанияПитание
цепей
управления
Информация о потребляемом
токе и о входном напряжении
Интерфейс
Узел
измерения
температуры
От НГ
ФРП
МикроконтроллерУзел
индикации
Преобразователь ФРП
К БЦ
К АБ
Узел
плавного
заряда
Рисунок 4.4 – Структурная схема силового блока
Выполнение требований по стабильности выходных параметров при
отклонениях напряжений первичных сетей и мощности нагрузок может быть
обеспечено:
достаточным запасом по уровню допустимой выходной мощности по
отношению к номинальной выходной мощности (длительной и нормальной);
выбором принципов регулирования и схемы управления,
обеспечивающих динамические характеристики и устойчивость работы
преобразователя в переходных режимах;
выбором ЭРИ, обеспечивающих долговременную стабильность выходных
параметров.
На рисунке 4.5 представлена функциональная схема силового блока.
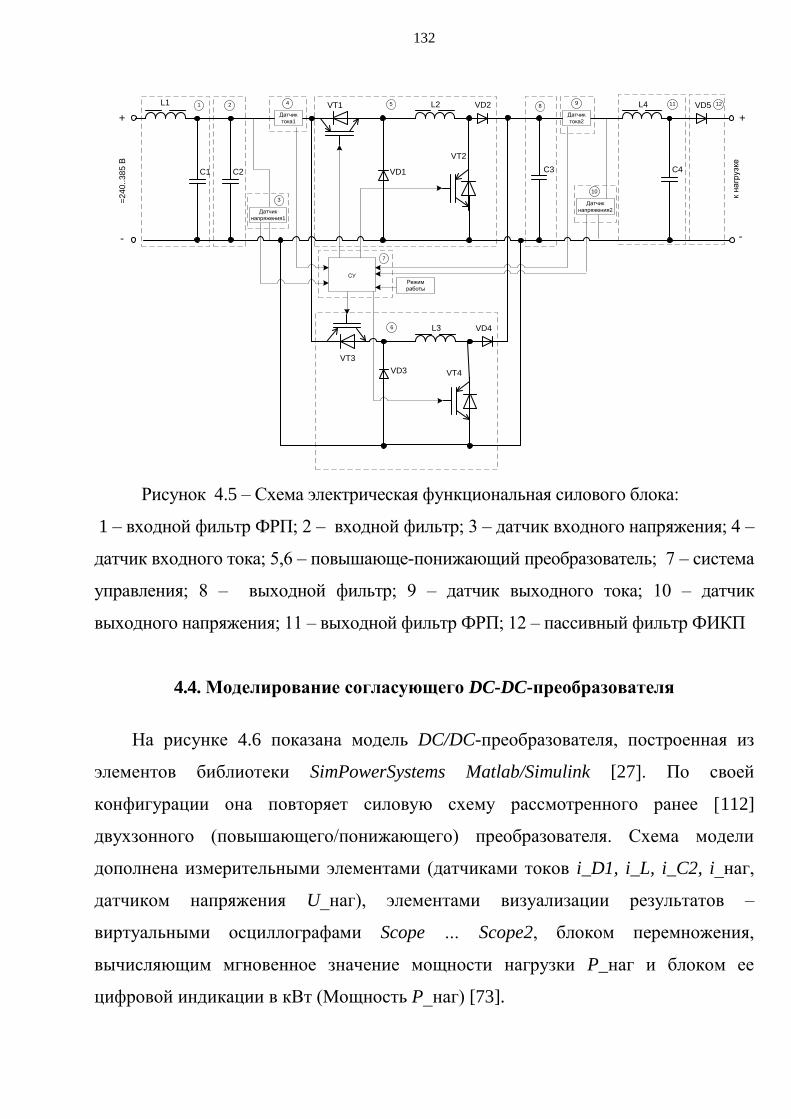
132
L2
C3
VT1
VD1
+
-
VT2
Режим
работы
СУ
VD2 VD5
C2C1
L1 L4
C4
Датчик
тока2
Датчик
напряжения2
Датчик
тока1 +
-
=2
40
..3
85
В
к на
грузк
е
1 2 4
3
5
7
89
10
11
L3
VT3
VD3 VT4
VD46
12
Датчик
напряжения1
Рисунок 4.5 – Схема электрическая функциональная силового блока:
1 – входной фильтр ФРП; 2 – входной фильтр; 3 – датчик входного напряжения; 4 –
датчик входного тока; 5,6 – повышающе-понижающий преобразователь; 7 – система
управления; 8 – выходной фильтр; 9 – датчик выходного тока; 10 – датчик
выходного напряжения; 11 – выходной фильтр ФРП; 12 – пассивный фильтр ФИКП
4.4. Моделирование согласующего DC-DC-преобразователя
На рисунке 4.6 показана модель DC/DC-преобразователя, построенная из
элементов библиотеки SimPowerSystems Matlab/Simulink [27]. По своей
конфигурации она повторяет силовую схему рассмотренного ранее [112]
двухзонного (повышающего/понижающего) преобразователя. Схема модели
дополнена измерительными элементами (датчиками токов i_D1, i_L, i_C2, i_наг,
датчиком напряжения U_наг), элементами визуализации результатов –
виртуальными осциллографами Scope … Scope2, блоком перемножения,
вычисляющим мгновенное значение мощности нагрузки P_наг и блоком ее
цифровой индикации в кВт (Мощность P_наг) [73].
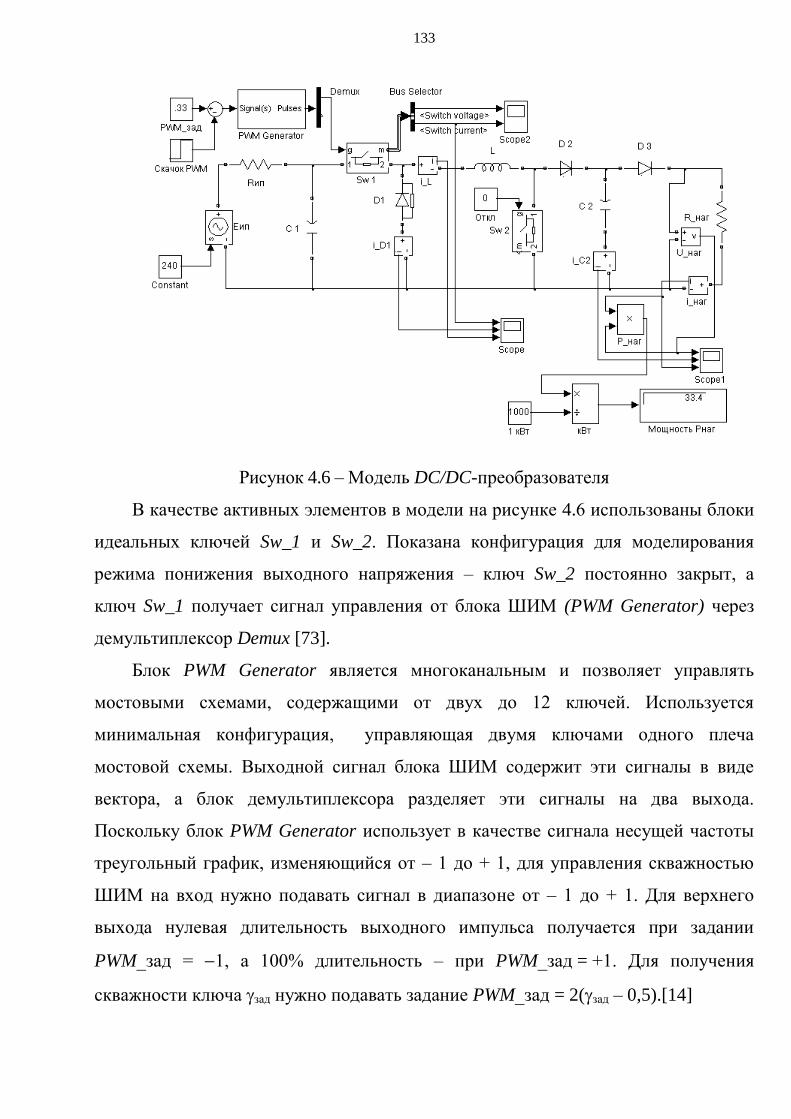
133
Рисунок 4.6 – Модель DC/DC-преобразователя
В качестве активных элементов в модели на рисунке 4.6 использованы блоки
идеальных ключей Sw_1 и Sw_2. Показана конфигурация для моделирования
режима понижения выходного напряжения – ключ Sw_2 постоянно закрыт, а
ключ Sw_1 получает сигнал управления от блока ШИМ (PWM Generator) через
демультиплексор Demux [73].
Блок PWM Generator является многоканальным и позволяет управлять
мостовыми схемами, содержащими от двух до 12 ключей. Используется
минимальная конфигурация, управляющая двумя ключами одного плеча
мостовой схемы. Выходной сигнал блока ШИМ содержит эти сигналы в виде
вектора, а блок демультиплексора разделяет эти сигналы на два выхода.
Поскольку блок PWM Generator использует в качестве сигнала несущей частоты
треугольный график, изменяющийся от – 1 до + 1, для управления скважностью
ШИМ на вход нужно подавать сигнал в диапазоне от – 1 до + 1. Для верхнего
выхода нулевая длительность выходного импульса получается при задании
PWM_зад = 1, а 100% длительность – при PWM_зад = +1. Для получения
скважности ключа зад нужно подавать задание PWM_зад = 2(зад – 0,5).[14]
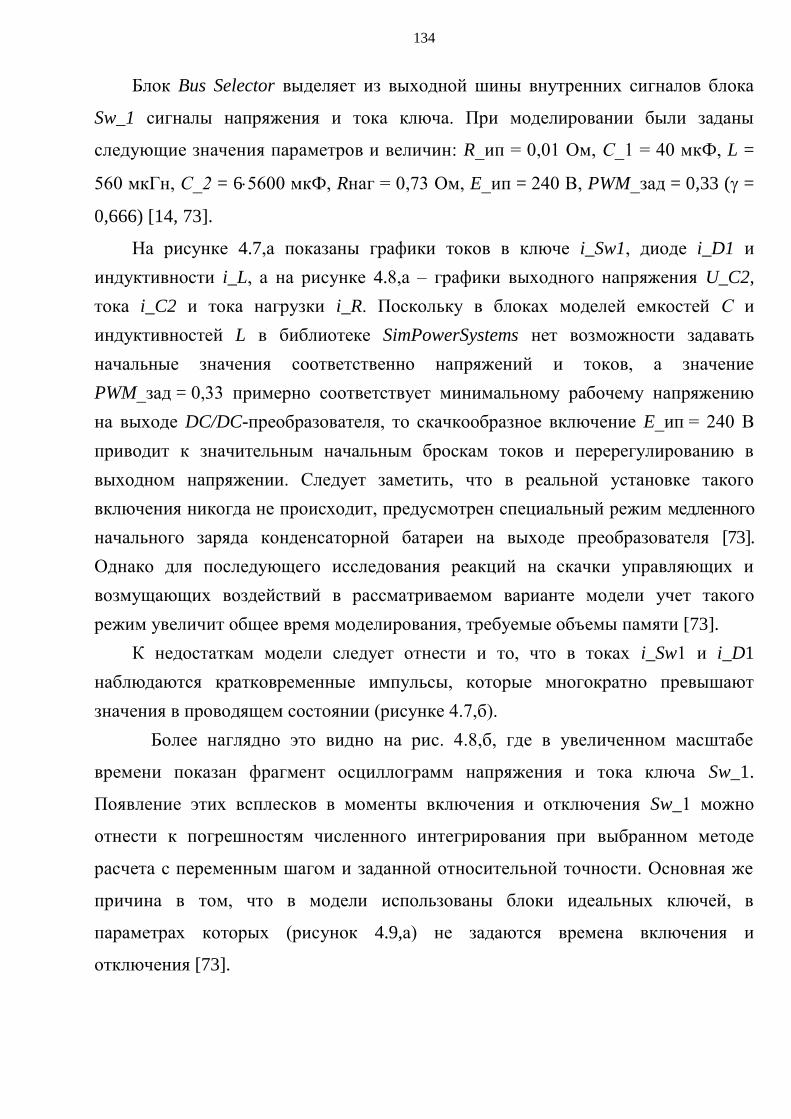
134
Блок Bus Selector выделяет из выходной шины внутренних сигналов блока
Sw_1 сигналы напряжения и тока ключа. При моделировании были заданы
следующие значения параметров и величин: R_ип = 0,01 Ом, С_1 = 40 мкФ, L =
560 мкГн, С_2 = 65600 мкФ, Rнаг = 0,73 Ом, E_ип = 240 В, PWM_зад = 0,33 ( =
0,666) [14, 73].
На рисунке 4.7,а показаны графики токов в ключе i_Sw1, диоде i_D1 и
индуктивности i_L, а на рисунке 4.8,а – графики выходного напряжения U_C2,
тока i_C2 и тока нагрузки i_R. Поскольку в блоках моделей емкостей С и
индуктивностей L в библиотеке SimPowerSystems нет возможности задавать
начальные значения соответственно напряжений и токов, а значение
PWM_зад = 0,33 примерно соответствует минимальному рабочему напряжению
на выходе DC/DC-преобразователя, то скачкообразное включение E_ип = 240 В
приводит к значительным начальным броскам токов и перерегулированию в
выходном напряжении. Следует заметить, что в реальной установке такого
включения никогда не происходит, предусмотрен специальный режим медленного
начального заряда конденсаторной батареи на выходе преобразователя [73].
Однако для последующего исследования реакций на скачки управляющих и
возмущающих воздействий в рассматриваемом варианте модели учет такого
режим увеличит общее время моделирования, требуемые объемы памяти [73].
К недостаткам модели следует отнести и то, что в токах i_Sw1 и i_D1
наблюдаются кратковременные импульсы, которые многократно превышают
значения в проводящем состоянии (рисунке 4.7,б).
Более наглядно это видно на рис. 4.8,б, где в увеличенном масштабе
времени показан фрагмент осциллограмм напряжения и тока ключа Sw_1.
Появление этих всплесков в моменты включения и отключения Sw_1 можно
отнести к погрешностям численного интегрирования при выбранном методе
расчета с переменным шагом и заданной относительной точности. Основная же
причина в том, что в модели использованы блоки идеальных ключей, в
параметрах которых (рисунок 4.9,а) не задаются времена включения и
отключения [73].
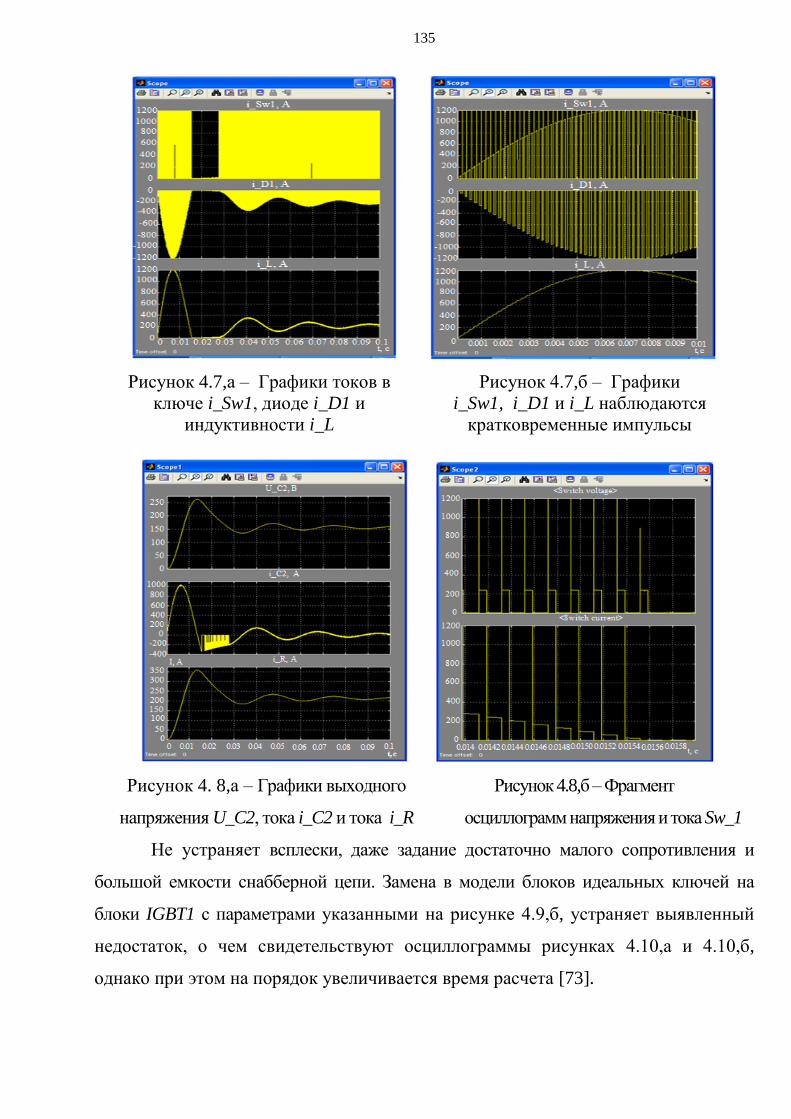
135
Рисунок 4.7,а – Графики токов в
ключе i_Sw1, диоде i_D1 и
индуктивности i_L
Рисунок 4.7,б – Графики
i_Sw1, i_D1 и i_L наблюдаются
кратковременные импульсы
Рисунок 4. 8,а – Графики выходного
напряжения U_C2, тока i_C2 и тока i_R
Рисунок 4.8,б – Фрагмент
осциллограмм напряжения и тока Sw_1
Не устраняет всплески, даже задание достаточно малого сопротивления и
большой емкости снабберной цепи. Замена в модели блоков идеальных ключей на
блоки IGBT1 с параметрами указанными на рисунке 4.9,б, устраняет выявленный
недостаток, о чем свидетельствуют осциллограммы рисунках 4.10,а и 4.10,б,
однако при этом на порядок увеличивается время расчета [73].
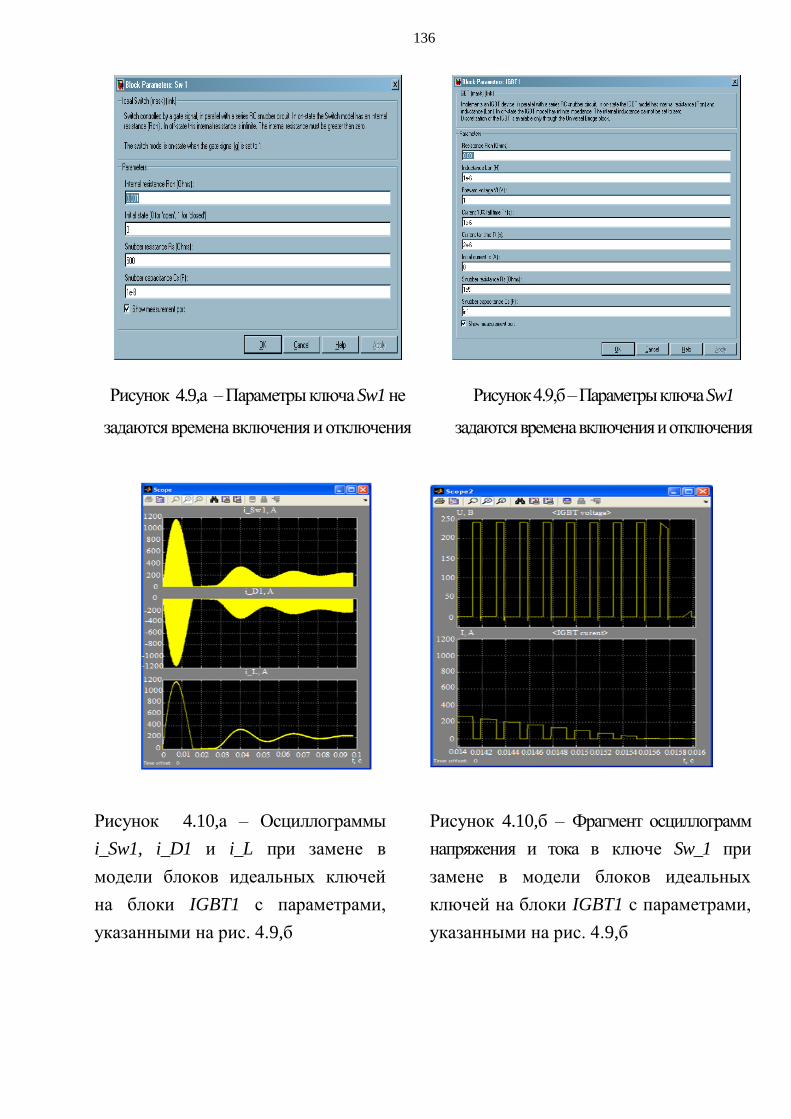
136
Рисунок 4.9,а – Параметры ключа Sw1 не
задаются времена включения и отключения
Рисунок 4.9,б – Параметры ключа Sw1
задаются времена включения и отключения
Рисунок 4.10,а – Осциллограммы
i_Sw1, i_D1 и i_L при замене в
модели блоков идеальных ключей
на блоки IGBT1 с параметрами,
указанными на рис. 4.9,б
Рисунок 4.10,б – Фрагмент осциллограмм
напряжения и тока в ключе Sw_1 при
замене в модели блоков идеальных
ключей на блоки IGBT1 с параметрами,
указанными на рис. 4.9,б
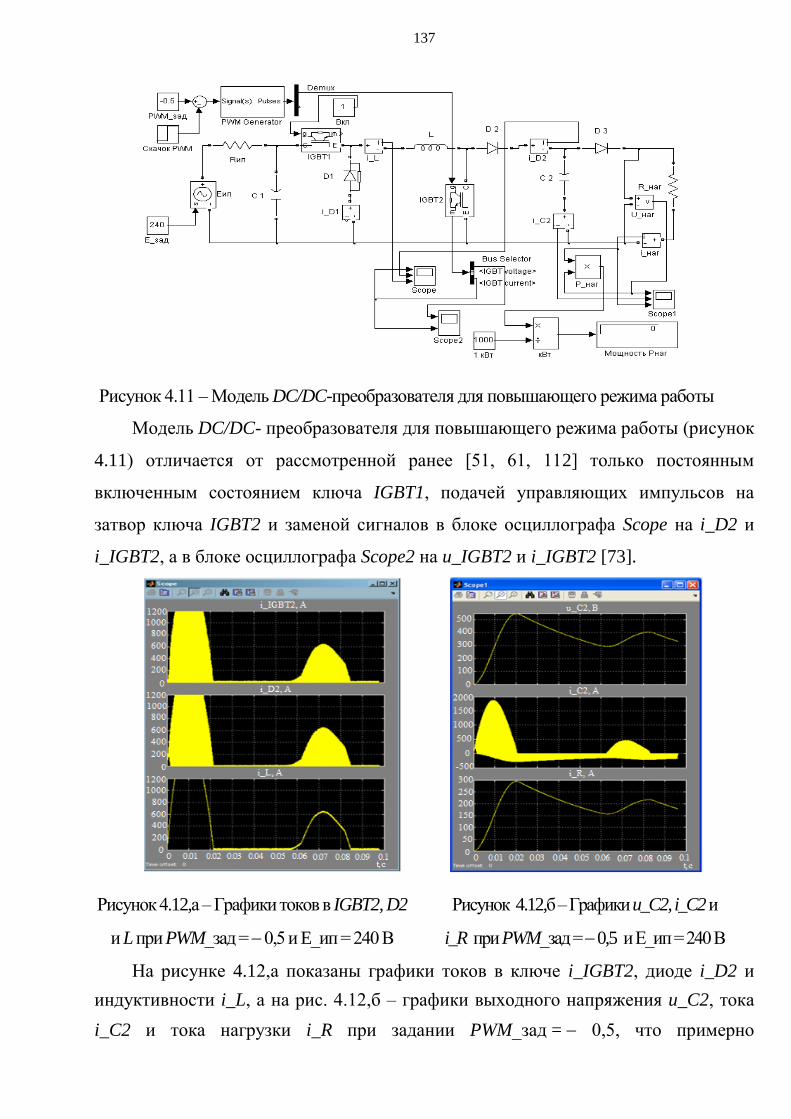
137
Рисунок 4.11 – Модель DC/DC-преобразователя для повышающего режима работы
Модель DC/DC- преобразователя для повышающего режима работы (рисунок
4.11) отличается от рассмотренной ранее [51, 61, 112] только постоянным
включенным состоянием ключа IGBT1, подачей управляющих импульсов на
затвор ключа IGBT2 и заменой сигналов в блоке осциллографа Scope на i_D2 и
i_IGBT2, а в блоке осциллографа Scope2 на u_IGBT2 и i_IGBT2 [73].
На рисунке 4.12,а показаны графики токов в ключе i_IGBT2, диоде i_D2 и
индуктивности i_L, а на рис. 4.12,б – графики выходного напряжения u_C2, тока
i_C2 и тока нагрузки i_R при задании PWM_зад = 0,5, что примерно
Рисунок 4.12,а – Графики токов в IGBT2, D2
и L при PWM_зад = 0,5 и E_ип = 240 В
Рисунок 4.12,б – Графики u_C2, i_C2 и
i_R при PWM_зад = 0,5 и E_ип = 240 В
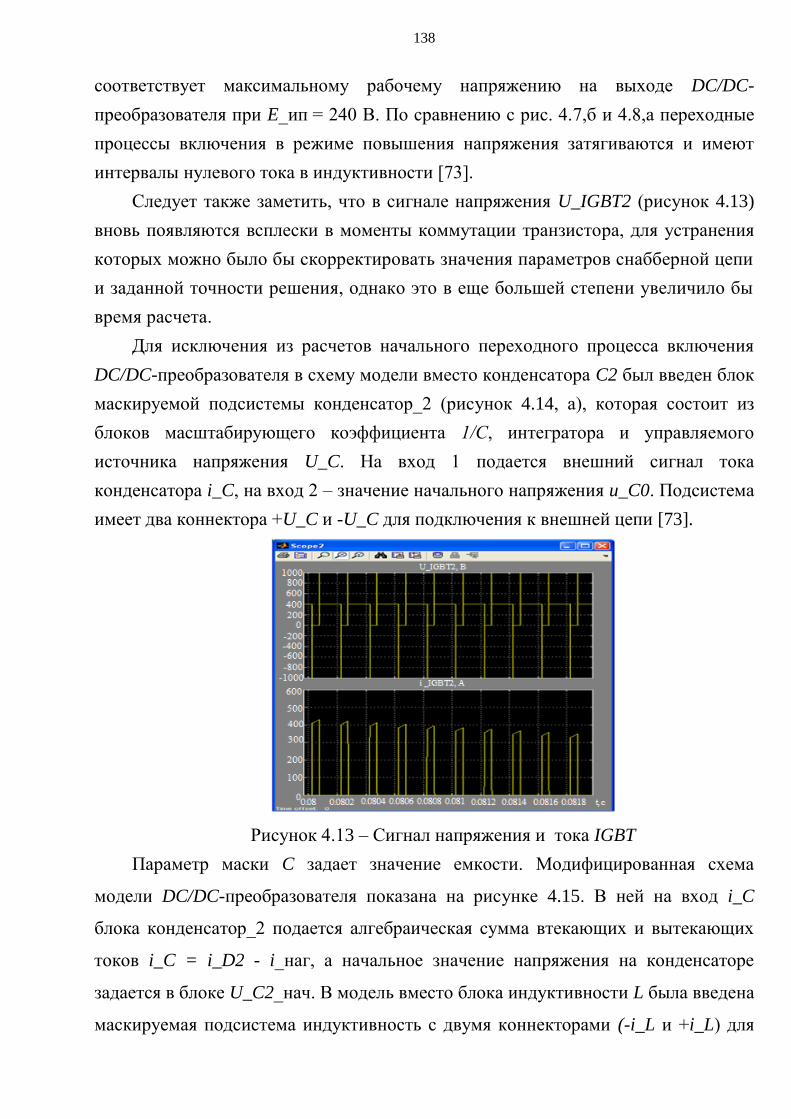
138
соответствует максимальному рабочему напряжению на выходе DC/DC-
преобразователя при E_ип = 240 В. По сравнению с рис. 4.7,б и 4.8,а переходные
процессы включения в режиме повышения напряжения затягиваются и имеют
интервалы нулевого тока в индуктивности [73].
Следует также заметить, что в сигнале напряжения U_IGBT2 (рисунок 4.13)
вновь появляются всплески в моменты коммутации транзистора, для устранения
которых можно было бы скорректировать значения параметров снабберной цепи
и заданной точности решения, однако это в еще большей степени увеличило бы
время расчета.
Для исключения из расчетов начального переходного процесса включения
DC/DC-преобразователя в схему модели вместо конденсатора C2 был введен блок
маскируемой подсистемы конденсатор_2 (рисунок 4.14, а), которая состоит из
блоков масштабирующего коэффициента 1/С, интегратора и управляемого
источника напряжения U_C. На вход 1 подается внешний сигнал тока
конденсатора i_C, на вход 2 – значение начального напряжения u_C0. Подсистема
имеет два коннектора +U_C и -U_C для подключения к внешней цепи [73].
Рисунок 4.13 – Сигнал напряжения и тока IGBT
Параметр маски C задает значение емкости. Модифицированная схема
модели DC/DC-преобразователя показана на рисунке 4.15. В ней на вход i_C
блока конденсатор_2 подается алгебраическая сумма втекающих и вытекающих
токов i_C = i_D2 - i_наг, а начальное значение напряжения на конденсаторе
задается в блоке U_C2_нач. В модель вместо блока индуктивности L была введена
маскируемая подсистема индуктивность с двумя коннекторами (-i_L и +i_L) для
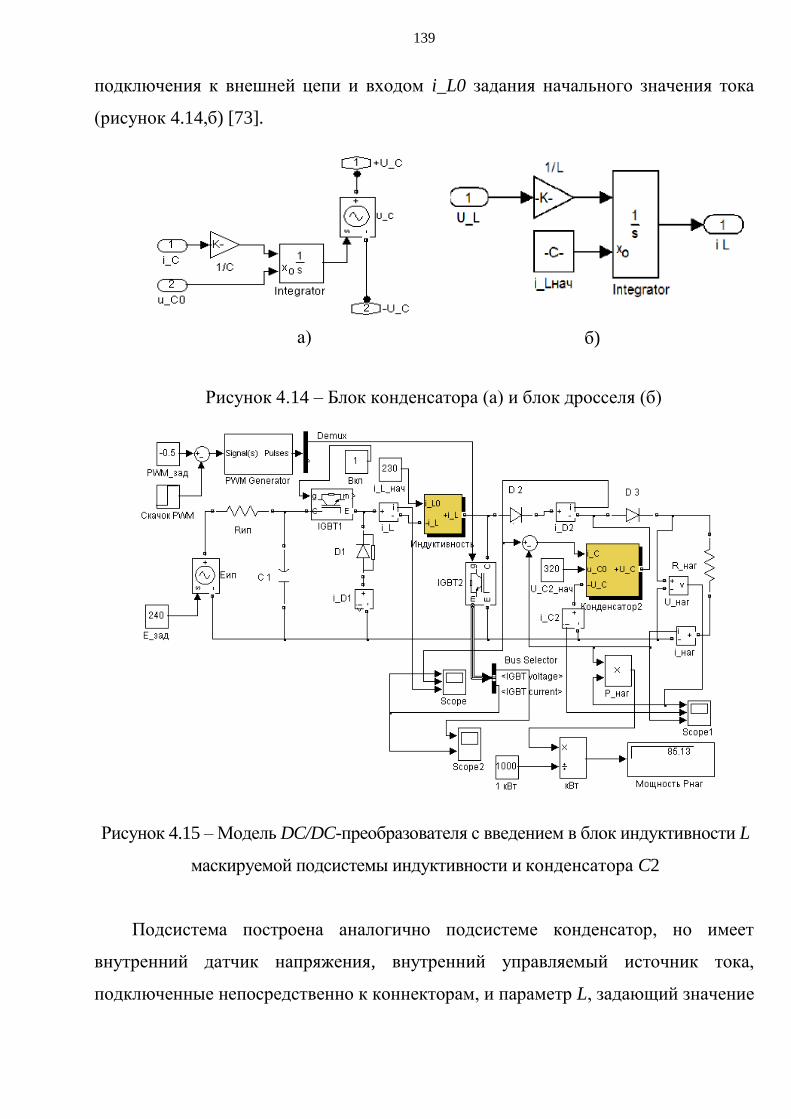
139
подключения к внешней цепи и входом i_L0 задания начального значения тока
(рисунок 4.14,б) [73].
Рисунок 4.14 – Блок конденсатора (а) и блок дросселя (б)
Рисунок 4.15 – Модель DC/DC-преобразователя с введением в блок индуктивности L
маскируемой подсистемы индуктивности и конденсатора C2
Подсистема построена аналогично подсистеме конденсатор, но имеет
внутренний датчик напряжения, внутренний управляемый источник тока,
подключенные непосредственно к коннекторам, и параметр L, задающий значение
а) б)
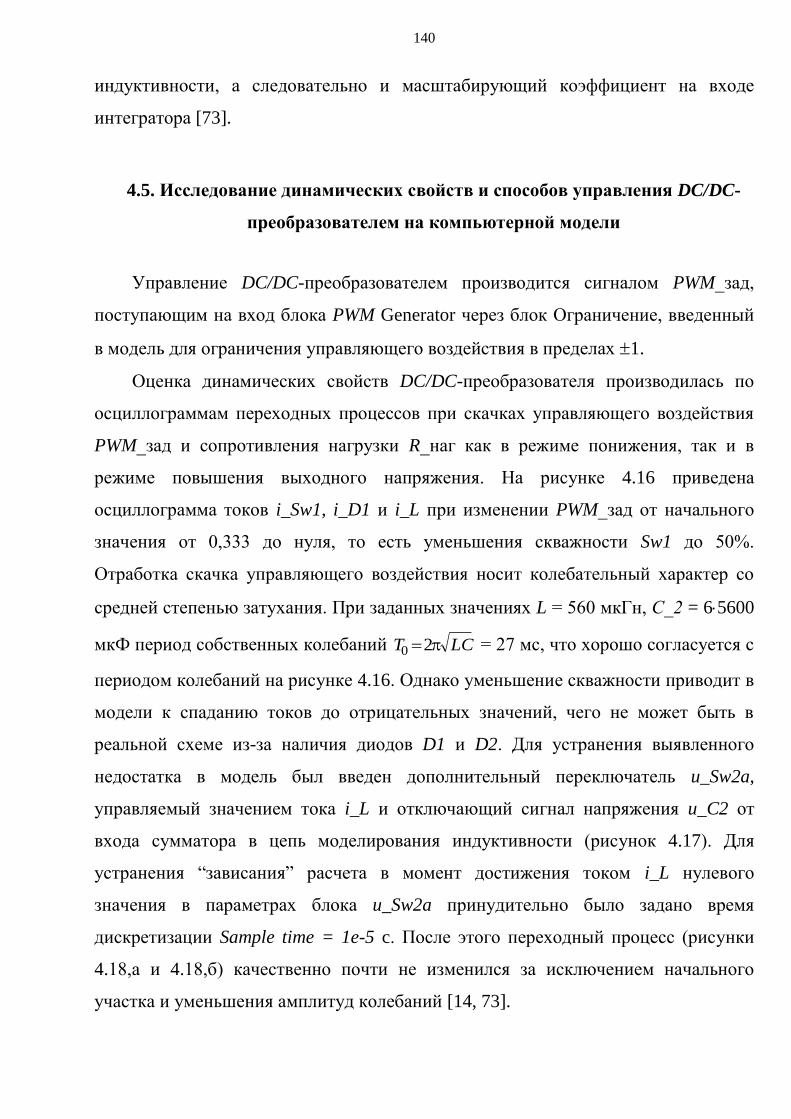
140
индуктивности, а следовательно и масштабирующий коэффициент на входе
интегратора [73].
4.5. Исследование динамических свойств и способов управления DC/DC-
преобразователем на компьютерной модели
Управление DC/DC-преобразователем производится сигналом PWM_зад,
поступающим на вход блока PWM Generator через блок Ограничение, введенный
в модель для ограничения управляющего воздействия в пределах 1.
Оценка динамических свойств DC/DC-преобразователя производилась по
осциллограммам переходных процессов при скачках управляющего воздействия
PWM_зад и сопротивления нагрузки R_наг как в режиме понижения, так и в
режиме повышения выходного напряжения. На рисунке 4.16 приведена
осциллограмма токов i_Sw1, i_D1 и i_L при изменении PWM_зад от начального
значения от 0,333 до нуля, то есть уменьшения скважности Sw1 до 50%.
Отработка скачка управляющего воздействия носит колебательный характер со
средней степенью затухания. При заданных значениях L = 560 мкГн, С_2 = 65600
мкФ период собственных колебаний LCT 20 = 27 мс, что хорошо согласуется с
периодом колебаний на рисунке 4.16. Однако уменьшение скважности приводит в
модели к спаданию токов до отрицательных значений, чего не может быть в
реальной схеме из-за наличия диодов D1 и D2. Для устранения выявленного
недостатка в модель был введен дополнительный переключатель u_Sw2a,
управляемый значением тока i_L и отключающий сигнал напряжения u_C2 от
входа сумматора в цепь моделирования индуктивности (рисунок 4.17). Для
устранения “зависания” расчета в момент достижения током i_L нулевого
значения в параметрах блока u_Sw2a принудительно было задано время
дискретизации Sample time = 1e-5 c. После этого переходный процесс (рисунки
4.18,а и 4.18,б) качественно почти не изменился за исключением начального
участка и уменьшения амплитуд колебаний [14, 73].
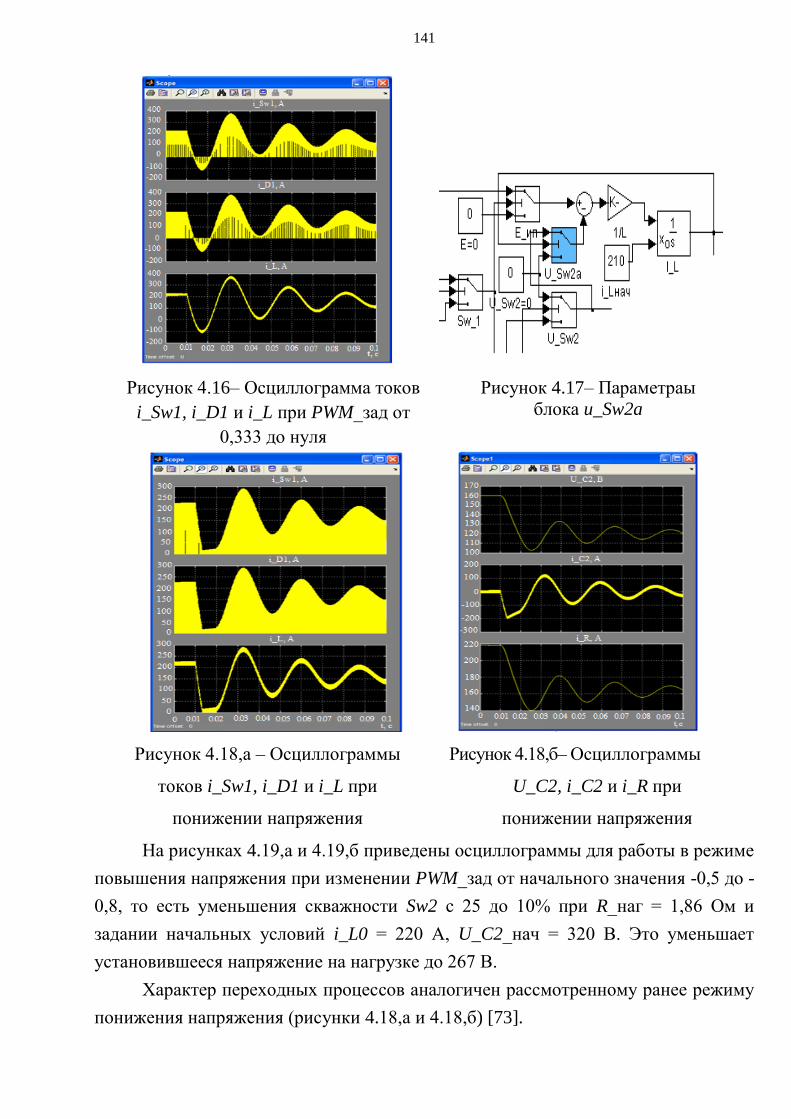
141
Рисунок 4.16– Осциллограмма токов
i_Sw1, i_D1 и i_L при PWM_зад от
0,333 до нуля
Рисунок 4.17– Параметраы
блока u_Sw2a
Рисунок 4.18,а – Осциллограммы
токов i_Sw1, i_D1 и i_L при
понижении напряжения
Рисунок 4.18,б– Осциллограммы
U_C2, i_C2 и i_R при
понижении напряжения
На рисунках 4.19,а и 4.19,б приведены осциллограммы для работы в режиме
повышения напряжения при изменении PWM_зад от начального значения -0,5 до -
0,8, то есть уменьшения скважности Sw2 с 25 до 10% при R_наг = 1,86 Ом и
задании начальных условий i_L0 = 220 А, U_C2_нач = 320 В. Это уменьшает
установившееся напряжение на нагрузке до 267 В.
Характер переходных процессов аналогичен рассмотренному ранее режиму
понижения напряжения (рисунки 4.18,а и 4.18,б) [73].
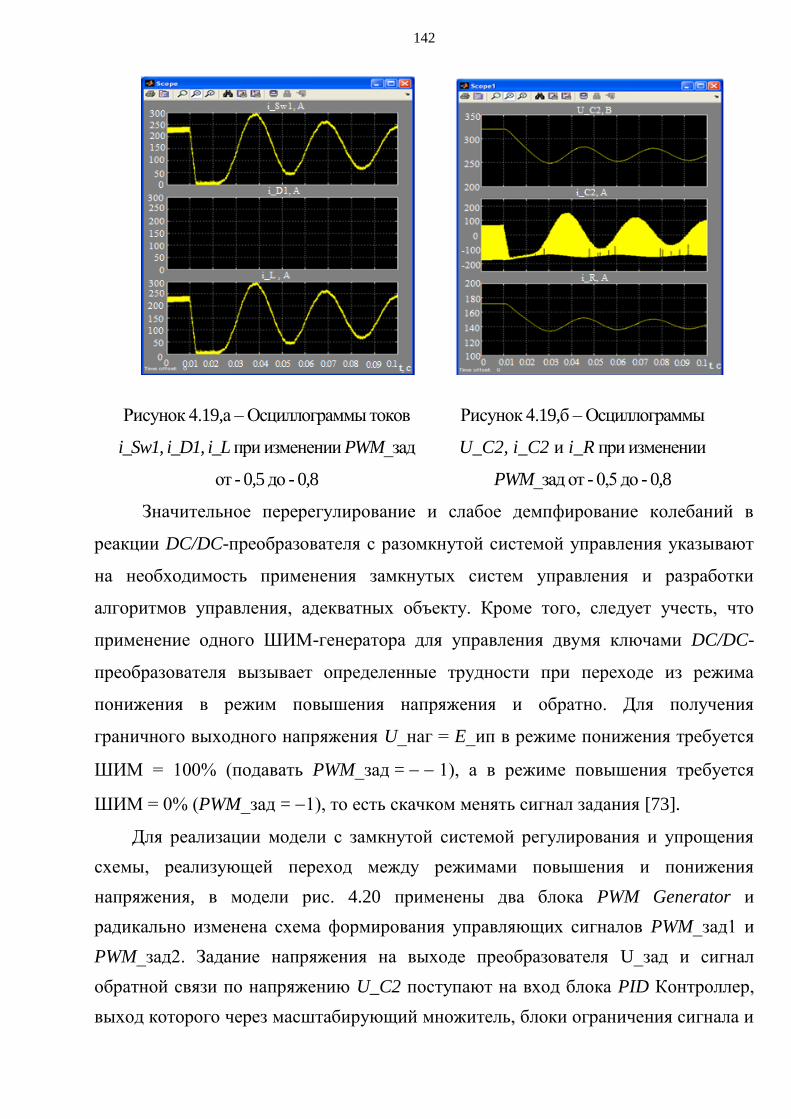
142
Значительное перерегулирование и слабое демпфирование колебаний в
реакции DC/DC-преобразователя с разомкнутой системой управления указывают
на необходимость применения замкнутых систем управления и разработки
алгоритмов управления, адекватных объекту. Кроме того, следует учесть, что
применение одного ШИМ-генератора для управления двумя ключами DC/DC-
преобразователя вызывает определенные трудности при переходе из режима
понижения в режим повышения напряжения и обратно. Для получения
граничного выходного напряжения U_наг = E_ип в режиме понижения требуется
ШИМ = 100% (подавать PWM_зад = 1), а в режиме повышения требуется
ШИМ = 0% (PWM_зад = 1), то есть скачком менять сигнал задания [73].
Для реализации модели с замкнутой системой регулирования и упрощения
схемы, реализующей переход между режимами повышения и понижения
напряжения, в модели рис. 4.20 применены два блока PWM Generator и
радикально изменена схема формирования управляющих сигналов PWM_зад1 и
PWM_зад2. Задание напряжения на выходе преобразователя U_зад и сигнал
обратной связи по напряжению U_C2 поступают на вход блока PID Контроллер,
выход которого через масштабирующий множитель, блоки ограничения сигнала и
Рисунок 4.19,а – Осциллограммы токов
i_Sw1, i_D1, i_L при изменении PWM_зад
от - 0,5 до - 0,8
Рисунок 4.19,б – Осциллограммы
U_C2, i_C2 и i_R при изменении
PWM_зад от - 0,5 до - 0,8
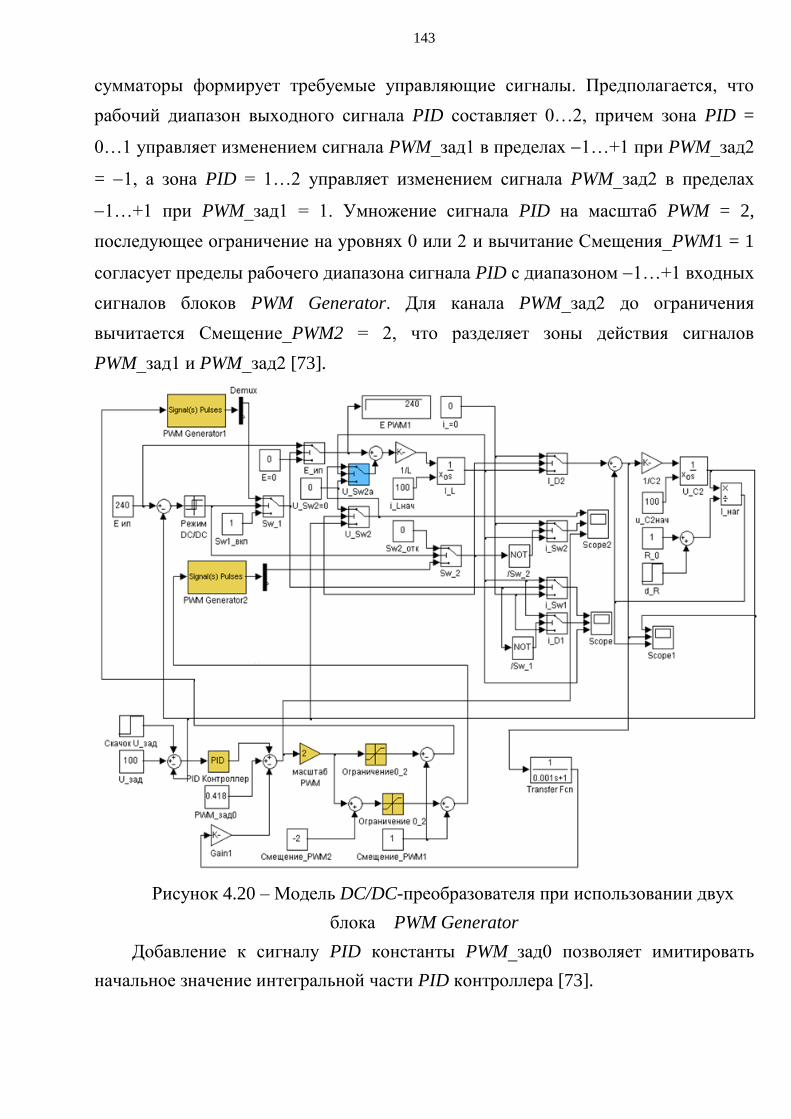
143
сумматоры формирует требуемые управляющие сигналы. Предполагается, что
рабочий диапазон выходного сигнала PID составляет 0…2, причем зона PID =
0…1 управляет изменением сигнала PWM_зад1 в пределах 1…+1 при PWM_зад2
= 1, а зона PID = 1…2 управляет изменением сигнала PWM_зад2 в пределах
1…+1 при PWM_зад1 = 1. Умножение сигнала PID на масштаб PWM = 2,
последующее ограничение на уровнях 0 или 2 и вычитание Смещения_PWM1 = 1
согласует пределы рабочего диапазона сигнала PID с диапазоном 1…+1 входных
сигналов блоков PWM Generator. Для канала PWM_зад2 до ограничения
вычитается Смещение_PWM2 = 2, что разделяет зоны действия сигналов
PWM_зад1 и PWM_зад2 [73].
Рисунок 4.20 – Модель DC/DC-преобразователя при использовании двух
блока PWM Generator
Добавление к сигналу PID константы PWM_зад0 позволяет имитировать
начальное значение интегральной части PID контроллера [73].
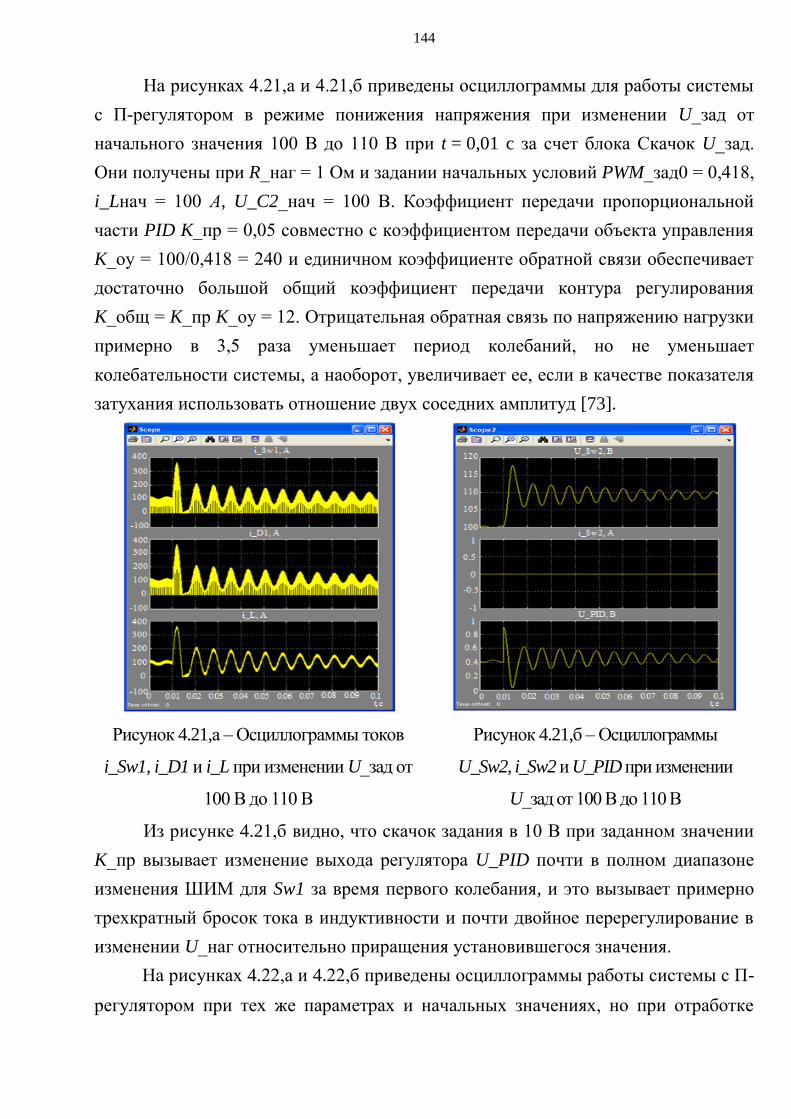
144
На рисунках 4.21,а и 4.21,б приведены осциллограммы для работы системы
с П-регулятором в режиме понижения напряжения при изменении U_зад от
начального значения 100 В до 110 В при t = 0,01 c за счет блока Скачок U_зад.
Они получены при R_наг = 1 Ом и задании начальных условий PWM_зад0 = 0,418,
i_Lнач = 100 А, U_C2_нач = 100 В. Коэффициент передачи пропорциональной
части PID K_пр = 0,05 совместно с коэффициентом передачи объекта управления
K_оу = 100/0,418 = 240 и единичном коэффициенте обратной связи обеспечивает
достаточно большой общий коэффициент передачи контура регулирования
K_общ = K_пр K_оу = 12. Отрицательная обратная связь по напряжению нагрузки
примерно в 3,5 раза уменьшает период колебаний, но не уменьшает
колебательности системы, а наоборот, увеличивает ее, если в качестве показателя
затухания использовать отношение двух соседних амплитуд [73].
Рисунок 4.21,а – Осциллограммы токов
i_Sw1, i_D1 и i_L при изменении U_зад от
100 В до 110 В
Рисунок 4.21,б – Осциллограммы
U_Sw2, i_Sw2 и U_PID при изменении
U_зад от 100 В до 110 В
Из рисунке 4.21,б видно, что скачок задания в 10 В при заданном значении
K_пр вызывает изменение выхода регулятора U_PID почти в полном диапазоне
изменения ШИМ для Sw1 за время первого колебания, и это вызывает примерно
трехкратный бросок тока в индуктивности и почти двойное перерегулирование в
изменении U_наг относительно приращения установившегося значения.
На рисунках 4.22,а и 4.22,б приведены осциллограммы работы системы с П-
регулятором при тех же параметрах и начальных значениях, но при отработке
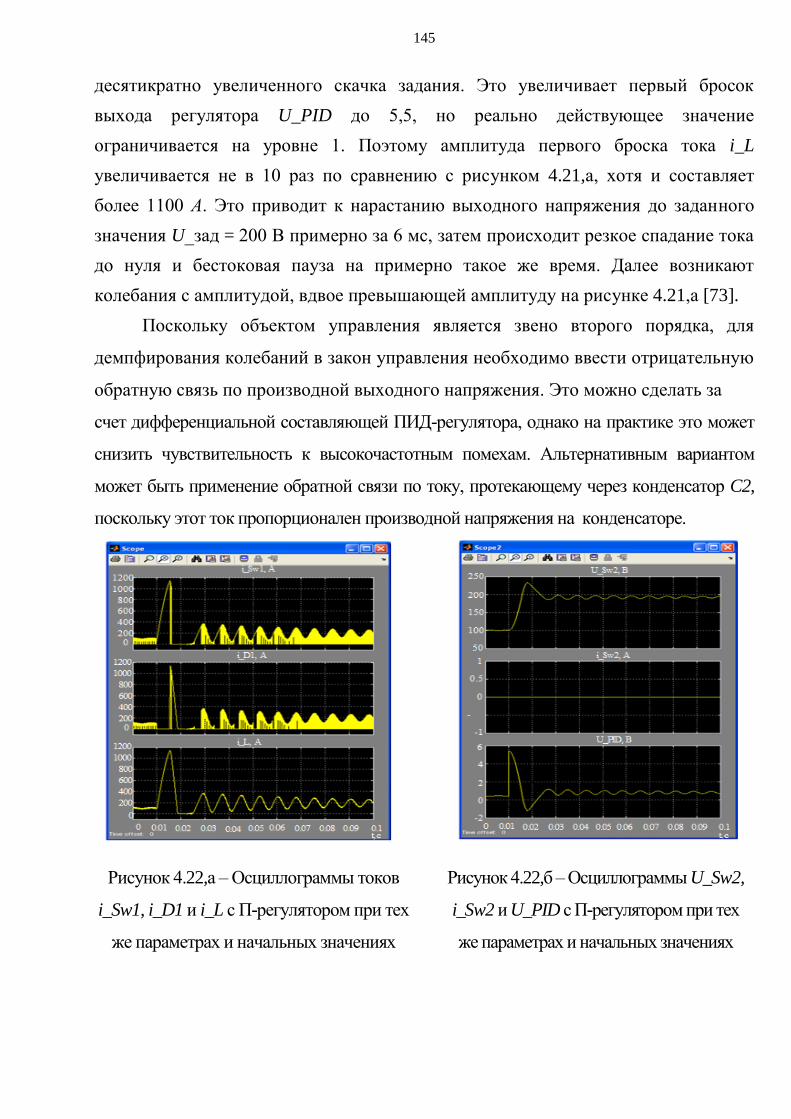
145
десятикратно увеличенного скачка задания. Это увеличивает первый бросок
выхода регулятора U_PID до 5,5, но реально действующее значение
ограничивается на уровне 1. Поэтому амплитуда первого броска тока i_L
увеличивается не в 10 раз по сравнению с рисунком 4.21,а, хотя и составляет
более 1100 А. Это приводит к нарастанию выходного напряжения до заданного
значения U_зад = 200 В примерно за 6 мс, затем происходит резкое спадание тока
до нуля и бестоковая пауза на примерно такое же время. Далее возникают
колебания с амплитудой, вдвое превышающей амплитуду на рисунке 4.21,а [73].
Поскольку объектом управления является звено второго порядка, для
демпфирования колебаний в закон управления необходимо ввести отрицательную
обратную связь по производной выходного напряжения. Это можно сделать за
счет дифференциальной составляющей ПИД-регулятора, однако на практике это может
снизить чувствительность к высокочастотным помехам. Альтернативным вариантом
может быть применение обратной связи по току, протекающему через конденсатор C2,
поскольку этот ток пропорционален производной напряжения на конденсаторе.
Рисунок 4.22,а – Осциллограммы токов
i_Sw1, i_D1 и i_L с П-регулятором при тех
же параметрах и начальных значениях
Рисунок 4.22,б – Осциллограммы U_Sw2,
i_Sw2 и U_PID с П-регулятором при тех
же параметрах и начальных значениях
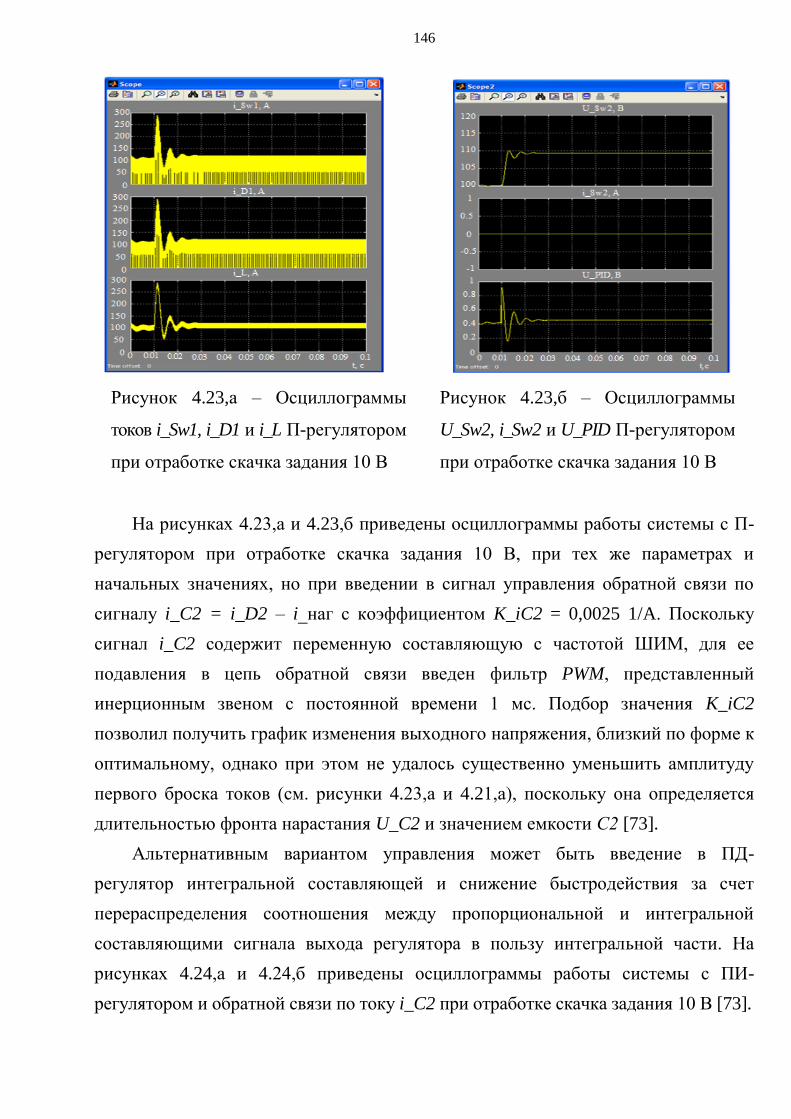
146
Рисунок 4.23,а – Осциллограммы
токов i_Sw1, i_D1 и i_L П-регулятором
при отработке скачка задания 10 В
Рисунок 4.23,б – Осциллограммы
U_Sw2, i_Sw2 и U_PID П-регулятором
при отработке скачка задания 10 В
На рисунках 4.23,а и 4.23,б приведены осциллограммы работы системы с П-
регулятором при отработке скачка задания 10 В, при тех же параметрах и
начальных значениях, но при введении в сигнал управления обратной связи по
сигналу i_C2 = i_D2 – i_наг с коэффициентом K_iC2 = 0,0025 1/A. Поскольку
сигнал i_C2 содержит переменную составляющую с частотой ШИМ, для ее
подавления в цепь обратной связи введен фильтр PWM, представленный
инерционным звеном с постоянной времени 1 мс. Подбор значения K_iC2
позволил получить график изменения выходного напряжения, близкий по форме к
оптимальному, однако при этом не удалось существенно уменьшить амплитуду
первого броска токов (см. рисунки 4.23,а и 4.21,а), поскольку она определяется
длительностью фронта нарастания U_C2 и значением емкости С2 [73].
Альтернативным вариантом управления может быть введение в ПД-
регулятор интегральной составляющей и снижение быстродействия за счет
перераспределения соотношения между пропорциональной и интегральной
составляющими сигнала выхода регулятора в пользу интегральной части. На
рисунках 4.24,а и 4.24,б приведены осциллограммы работы системы с ПИ-
регулятором и обратной связи по току i_C2 при отработке скачка задания 10 В [73].
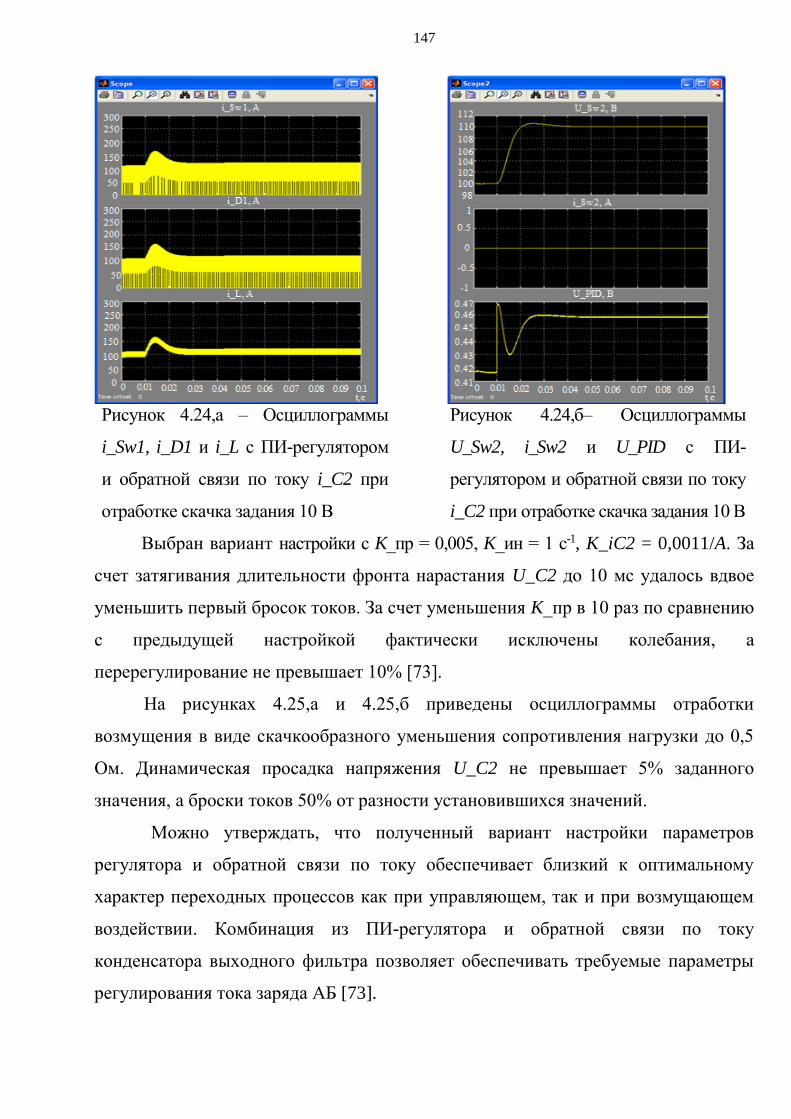
147
Рисунок 4.24,а – Осциллограммы
i_Sw1, i_D1 и i_L с ПИ-регулятором
и обратной связи по току i_C2 при
отработке скачка задания 10 В
Рисунок 4.24,б– Осциллограммы
U_Sw2, i_Sw2 и U_PID с ПИ-
регулятором и обратной связи по току
i_C2 при отработке скачка задания 10 В
Выбран вариант настройки с K_пр = 0,005, K_ин = 1 с-1, K_iC2 = 0,0011/A. За
счет затягивания длительности фронта нарастания U_C2 до 10 мс удалось вдвое
уменьшить первый бросок токов. За счет уменьшения K_пр в 10 раз по сравнению
с предыдущей настройкой фактически исключены колебания, а
перерегулирование не превышает 10% [73].
На рисунках 4.25,а и 4.25,б приведены осциллограммы отработки
возмущения в виде скачкообразного уменьшения сопротивления нагрузки до 0,5
Ом. Динамическая просадка напряжения U_C2 не превышает 5% заданного
значения, а броски токов 50% от разности установившихся значений.
Можно утверждать, что полученный вариант настройки параметров
регулятора и обратной связи по току обеспечивает близкий к оптимальному
характер переходных процессов как при управляющем, так и при возмущающем
воздействии. Комбинация из ПИ-регулятора и обратной связи по току
конденсатора выходного фильтра позволяет обеспечивать требуемые параметры
регулирования тока заряда АБ [73].
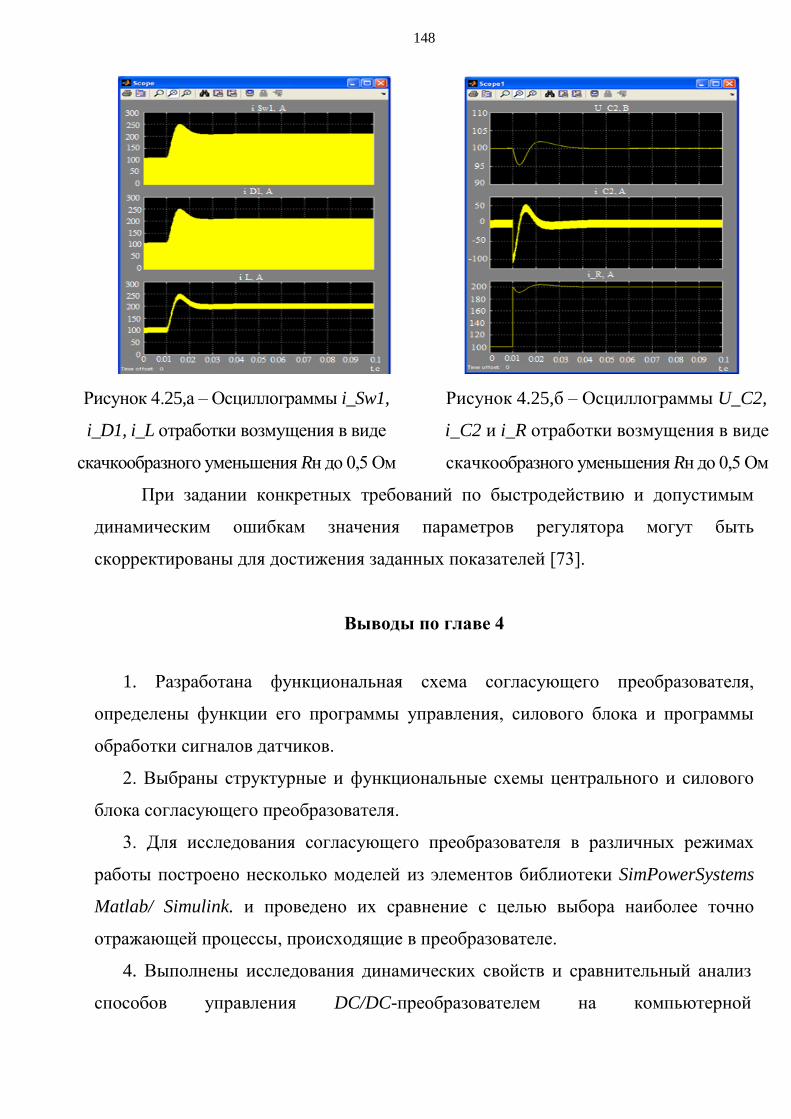
148
При задании конкретных требований по быстродействию и допустимым
динамическим ошибкам значения параметров регулятора могут быть
скорректированы для достижения заданных показателей [73].
Выводы по главе 4
1. Разработана функциональная схема согласующего преобразователя,
определены функции его программы управления, силового блока и программы
обработки сигналов датчиков.
2. Выбраны структурные и функциональные схемы центрального и силового
блока согласующего преобразователя.
3. Для исследования согласующего преобразователя в различных режимах
работы построено несколько моделей из элементов библиотеки SimPowerSystems
Matlab/ Simulink. и проведено их сравнение с целью выбора наиболее точно
отражающей процессы, происходящие в преобразователе.
4. Выполнены исследования динамических свойств и сравнительный анализ
способов управления DC/DC-преобразователем на компьютерной
Рисунок 4.25,а – Осциллограммы i_Sw1,
i_D1, i_L отработки возмущения в виде
скачкообразного уменьшения Rн до 0,5 Ом
Рисунок 4.25,б – Осциллограммы U_C2,
i_C2 и i_R отработки возмущения в виде
скачкообразного уменьшения Rн до 0,5 Ом
149
модели. Выбраны параметры настройки ПИ-регулятора и обратной связи по току,
обеспечивающих близкий к оптимальному характер переходных процессов как
при управляющем, так и при возмущающем воздействии [73].
5. Комбинация из ПИ-регулятора и обратной связи по току конденсатора
выходного фильтра позволяет обеспечивать требуемые параметры регулирования
тока заряда АБ.
ЗАКЛЮЧЕНИЕ
1. Выбрана схема замещения и математическая модель свинцово-кислотной
и литий-ионной аккумуляторной батареи (АБ), выполнен анализ алгоритмов
заряда и разряда аккумуляторов, установлены конечные значения напряжений
аккумуляторов в процессах заряда и разряда и лечебных циклов, рассчитаны
зарядные и разрядные характеристики. Предложена математическая модель
устройства балансировки, использование которого уменьшает величину
разбаланса – это позволяет в полной мере использовать емкость аккумуляторов.
2. Разработана математическая модель и алгоритм расчёта ВИГ,
основанный на расчёте магнитного поля генератора методом конечных элементов.
Выполнены расчёты параметров и характеристик вентильно-индукторного
генератора при мощности 1320 и 1250 кВт с конфигурацией статора/ротора
соответственно 18/12 и 24/16 в программных комплексах Elcut и Matlab-Simulink.
3. Результаты расчётов ВИГ мощностью 1250 кВт хорошо согласуются с
результатами, полученными при экспериментальных исследованиях опытного
образца, что говорит об адекватности разработанной математической модели ВИГ.
4. Проведен сравнительный анализ двух схем питания ВИГ при мощности
1100 кВт с управляемым инвертором (два способа регулирования выходной
мощности) и с неуправляемым выпрямителем на выходе, из которых первая (при
регулировании выходной мощности путем сдвига зак в сторону опережения при
неизменном положении вкл и отк) показала лучшие характеристики и
рекомендована для разработки алгоритма управления ВИГ.
150
5. Разработана компьютерная модель системы дизельного двигателя-
вентильно-индукторного генератора (ДД-ВИГ) и проведено исследование
динамических процессов электромеханического преобразования энергии во всех
режимах работы привода с разработкой и исследованием алгоритма управления
ВИГ и влияния коммутационных параметров на основные его показатели в
различных режимах.
6. Для построения системы мониторинга состояния АБ определен перечень
зарядных характеристик АБ и параметры, от которых они зависят. Разработана
многоуровневая система мониторинга АБ, ее состав, алгоритмы и программы
работы основных блоков. Исследования показали, что в реальном времени при
заряде токами 3600-1800-900-400 А, погрешность определения напряжения
составляет 0 % ÷ +2,7%. Погрешность определения тока (измеренный ток и
заданный ток) составляет -2,74% ÷ +1,25%. Погрешность расчета плотности
составляет 1,18% ÷ 6,8%.
7. Предложенный комплексный контроль параметров: напряжения, тока,
температуры электролита, емкости, плотности электролита АБ обеспечивает
высокую достоверность информации о состоянии АБ в процессе эксплуатации,
универсальность, и как следствие, широкую область применения, что позволяет
применять АЗРЭТК как аккумуляторов разных типов.
8. Представлена структурная схема АЗРКЭТК. Определены основные
характеристики комплекса и выполнено описание режимов функционирования и
алгоритма программного управления. Разработаны компьютерные модели блока
понизителя, блока рекуперации и АЗРЭТК.
9. Проведен цикл теоретических исследований и сравнение их результатов с
результатами экспериментальных исследований для апробации эффективных
алгоритмов режимов заряда-разряда и регенерации аккумуляторных батарей.
10. Разработана функциональная схема согласующего преобразователя,
программы управления и обработки сигналов датчиков. Выбраны структурные и
функциональные схемы центрального и силового блока. Путем сранительного
151
анализа нескольких моделей выбрана наиболее точно отражающая процессы,
происходящие в согласующем преобразователе.
11. На компьютерной модели выполнены исследования динамических
свойств и сравнительный анализ способов управления DC/DC-пре-
образователем. Выбраны параметры настройки ПИ-регулятора и обратной связи
по току, обеспечивающих требуемые переходные процессы как при управляющем,
так и при возмущающем воздействии.
12. Перспективы дальнейшей разработки темы диссертации заключаются в
развитии ресурсосберегающих режимов работы АЗРЭТК и повышении его
надежности, поиске схемотехнических решений электронных устройств и
алгоритмов управления, обеспечивающих автоматическую коррекцию
программных режимов работы АЗРЭТК при реализации режимов заряда-разряда
в условиях изменяющейся среды.
152
СПИСОК СОКРАЩЕНИЙ
АБ – аккумуляторная батарея
АЗРЭТК – автономный зарядно-разрядный электротехнический комплекс
АМ – асинхронная машина
АСМАБ – автоматизированная система мониторинга аккумуляторных батарей
БР – блок рекуперации
БУ – блок управления
ВИГ – вентильный индукторный генератор
ВИД – вентильный индукторный двигатель
ВИМ – вентильная индукторная машина
ВИП – вентильный индукторный привод
ГЭД – главны электродвигатель
ДД – дизельный двигатель
ДД–ВИГ – дизельный двигатель- вентильный индукторный генератор
ДД – ГПЭ –дизельный двигатель – генераторный преобразователь электроэнергии
МЗРК – мобильный зарядно-разрядный комплекс
НУ – нагрузочное устройство
ПКТН – подсистема контроля тока и напряжения
СМ АБ – система мониторинга аккумуляторных батарей
СУ – система управления
ЦАП – цифро-аналоговый преобразователь
ЦСУ – централизованная система управления
ШИМ – широтно-импульсная модуляция
ЭВМ – электронно-вычислительная машина
ЭЭС – электроэнергетическая система
153
СПИСОК ЛИТЕРАТУРЫ
1. Пат. 2595267 РФ, МПК H02J 7/24. Мобильный зарядно-разрядный комплекс
для корабельных аккумуляторных батарей / Цветков А.А., Мановицкий А.М., Фам
Конг Тао., Савченко А.В. и др. – Опубл. 28.08.2016 Бюл. № 24.
2. Темирёв А.П. Математическое моделирование, проектирование, и
экспериментальное определение параметров вентильно-индукторных
электроприводов: Монография / А.П. Темирёв. – Новочеркасск: ЛИК, 2011г. –794с.
3. Преобразовательная техника. Зарядные и зарядно-разрядные утройства., ОАО
"Электровыпрямитель", [В Интернете]. Available:
http://www.elvpr .ru/preobraztechnic/zaryadpusk/uza.php. (дата обращения
30.08.2017)
4. Пат. 89296 РФ, МПК: H02J7/00. Автоматизированная сильноточная система
зарядки-разрядки аккумуляторных батарей / Иванов Н.А., Красов В.И., Куличенко
О.В., Лебедев А.Н., Николаенко В.Т., и др. – зарегистрирован
в Государственном реестре изобретений 2009.
5. Пат. 122212 РФ, МПК: H02J7/32. Автономная электростанция / Стоянов Ю.П.,
Зенин В.В., Колесников Д. П. – зарегистрирован в Государственном реестре
изобретений 2006.
6. Пат. 2419943 РФ, МПК: H02J7/10. Зарядно-разрядный береговой комплекс для
корабельных аккумуляторных батарей с электропитанием от высоковольтной сети
/ Павлюков В.М., Юдин А.Н., Кротенко А. В., Куликов В.К., Темирев А.П и др. –
Опубл. 27.05.2011, Бюл. № 15.
7. Нгуен Куанг Кхоа. Методика моделирования вентильно-индукторных
двигателей с помощью программ Elcut и MatlabSimulink / Нгуен Куанг Кхоа //
Известия высших учебных заведений. Электромеханика. – 2016. – № 2. – С. 73–79.
8. Пат. 99654 РФ, МКПО 13-01. Индукторный электродвигатель ИД-
1250/187. Фам Конг Тао., Темирев А.П., Цветков А.А., Киселев В.И. и др. –
зарегистрирован в Государственном реестре изобретений 29.07.2016.
9. В. Н. Галушко. Моделирование вентильно-индукторнных двигателей / В.Н.
Галушко, Т.В. Алферова, С.И. Бахур, А.А. Алферов // электротехника и
энергетика. – 2014. – С. 45–55.
154
10. Савченко А.В. Совершенствование системы контроля параметров
аккумуляторов и диагностирования аккумуляторных / А.В. Савченко., А.А.
Темирёв., и др. // Научный альманах. – 2015. – № 10-3(12). – С. 211– 220.
11. Аккумуляторы - подробное описание по устройству, обслуживанию, зарядке,
http://auto.msk.ru (дата обращения 30.05.2017)
12. Математическая модель аккумуляторных батарей в среде Matlab.
http://www.mathworks.com/help/physmod/sps/powersys/ref/battery.html (дата обращения
30.06.2017)
13. Фёдоров Андрей Евгеньевич. Создание адаптивных модульных агрегатов
бесперебойного питания корабельных электротехнических систем // Фёдоров,
Андрей Евгеньевич: Дисс. на соискание ученой степени кандидата техн. наук. – М.:
2006. – 158 с.
14. Модель согласующего DC-DC-преобразователя автономного
комбинированного электротехнического комплекса корабельных аккумуляторных
батарей / Фам Конг Тао, А.П. Темирев // Известия высших учебных заведений.
Электромеханика, – 2018. Т 61. - № 4. – С. 45– 54.
15. Синченко С.В. Построение математических моделей разрядных
характеристик электрохимических аккумуляторов различных типов при помощи
схем замещения / С.В. Синченко., С.В. Ширинский //Авиационно-космическая
техника и технология. – 2013. – № 7. – С. 133 – 138.
16. Дизельный двигатель. http://systemsauto.ru/engine/diesel_engine.html (дата
обращения 10.11.2016)
17. Дизель-генератор FG Wilson P1650E. [В Интернете]. Available:
http://www.rpmsel.ru/generator/zalivka/ dizel303000/wilson/1035/p1650e.html (дата
обращения 10.11.2016)
18. Фам Конг Тао. Разработка дизельного двигателя-вентильно индукторного
генератора для мобильного зарядно-разрядного комплекса / Фам Конг Тао., Фам
Ван Бьен и др // Международный научно-исследовательский журнал успехи
современной науки. – 2017. – № 4. Том 5. – С. 104 – 111.
19. Ковылов Ю. Л. Теория рабочих процессов и моделирование процессов
двигателей внутреннего сгорания (ДВС) / Ю. Л. Ковылов. – Самара, 2013. – 418 с.
20. Nikiforov. New fuel cell plants mid power sources for submarines / Nikiforov //
Third international symposium AES 2000, p.120-125.
155
21. Дядик А.Н., Никифоров Б. В. Корабельные энергетические системы/ Дядик
А.Н., Никифоров Б. В. Новочеркасск – М.: 2012. – 680 с.
22. Н.Б Кавитха. Анализ динамических характеристик вентильно-индукторнных
генераторов / Н.Б Кавитха., B.Вину Прия // Международная конференция по
достижениям в области техники и технологий (ICAET 2014) 29-30 марта 2014
года в Сингапуре. – С. 576–580.
23. Jianbo Sun. Modeling and Design of Switched Reluctance Starter/Generator Sys-
tem / Jianbo Sun, Zhongchao Wei, Shuanghong Wang, Qionghua Zhan, and Zhiyuan
Ma // Progress In Electromagnetics Research Symposium Proceedings, Moscow, Russia,
August 18–21, 2009. C.1976-1982.
24. Пат. №2327274 РФ, МПК: H02M3/24. Полномостовой преобразователь
постоянного напряжения с мягкой коммутацией./ Сметанкин Г.П., Бурдюгов А.С.,
Матекин С.С. Опубл – 1997. Бюл. № 22.
25. http://so-ups.ru/fileadmin/files/company/r-n-tpolitics/frequency/specdocs sto_
standard/ GOST_13109-97.pdf (дата обращения 12.02.2017)
26. ELCUT. Моделирование двумерных полей методом конечных элементов.
Версия 5.1. Руководство пользователя. СПб.: Производственный кооператив ТОР,
2003. – 249 с.
27. Черных И.В. Моделирование электротехнических устройств в MATLAB,
SimPowerSystems и Simulink. М.: ДМК Пресс, СПб: Питер, 2008. – 288 с.
28. ELCUT - программа моделирования электромагнитных, тепловых и
механических задач. www.elcut.ru (дата обращения 10.12.2015).
29. Фам Конг Тао. Методика математического и экспериментального
определения энергетических параметров вентильно-индукторного двигателя
большой мощности двухпакетной конструкции/ Фам Конг Тао., Фам Ван Бьен и
др. // Международный научно-исследовательский журнал успехи современной
науки. – 2016, – №9, Том 4, – С. 149 – 155.
30. Система управления энергетической установкой с электрохимическим
генератором. [В Интернете]. Available: http://elib.spbstu.ru/dl/2/6487.pdf/ download
/6487.pdf (дата обращения 10.01.2018).
31. Никифоров Б.В. Корабельные системы электродвижения / Никифоров Борис
Владимирович: Дис… док-ра техн. наук.– Санкт-Петербург., 2006.- 369 с.
32. Нгуен Куанг Кхоа. Энергоэффективный вентильно-индукторный
электропривод большой мощности с двигателем двухпакетной конструкции /
156
Нгуен Куанг Кхоа: Дисс. на соискание ученой степени кандидата техн. наук. – М.:
2017. – 332 с.
33. Птах Г.К. Испытания вентильной пятифазной индукторной машины в
генераторном режиме / Г.К. Птах, А.А. Цветков, О.Е. Лозицкий и др. // Силовая
электроника в бортовых системах электроснабжения и электроприводах: материал
межотраслеввого научно-техническиго семинара, г. Новочеркасск, 21-22 мая
2006г., Юж.-Рос. Гос. Техн. Ун-т. – Новочеркасск. Ред. Журн. «Изв. Вузов.
Электромеханика», 2006. – С. 292–295.
34. Фам Конг Тао. Разработка вентильно - индукторного генератора для
автономного зарядно – разрядного электротехнического комплекса / Фам Конг
Тао, Фам Ван Бьен // Известия высших учебных заведений. Электромеханика, –
2018. Т 61. - № 1. – С. 25– 31.
35. Бобров А.В. Разработка датчика положения ротора в вентильных
индукторных машинах большой мощности/ Бобров А.В., Фам Конг Тао и др. //
Кибернетика энергетических систем: Сб. материалов XXXVIII сессии Всеросс.
науч. семинара по тематике «диагностика энергооборудования». г. Новочеркасск.
17-19 октября 2016 г. / ЮРГПУ (НПИ) имени М.И. Платова. – Новочеркасск:
ЮРГПУ (НПИ). – 2016. – С.172–181.
36. Siyang Yu. High Efficiency Operation of a Switched Reluctance Generator over a
Wide Speed Range. / Siyang Yu., Fengge Zhang., Dong-Hee Lee., Jin-Woo Ahn //
Journal of Power Electronics, Vol. 15, No. 1, January 2015. Pages 123–130.
37. D.Susitra. Switched Reluctance Generator - Modeling, Design, Simulation, Analy-
sis and Control A Comprehensive Review / D.Susitra., E.Annie Elisabeth Jebaseeli.,
S.Paramasivam. // International Journal of Computer Applications (0975 – 8887), 2010.
Volume 1 – No. 2. https://www.researchgate.net/publication/274594991.
38. David A. Torrey. Switched Reluctance Generators and Their Control / David A.
Torrey // IEEE transactions on industrial electronics, vol. 49, no. 1, february 2002.
https://www.researchgate.net/publication/3217951(дата обращения 10.9.2016).
39. Пат. 2265270 РФ, МПК H 02 M 3/24. Преобразователь постоянного напряжения
/ Давыдов В.Н., Никифоров Б.В., Юрин А.В., Апиков В.Р., Тумасянц Р.А., Темирев
А.П., Лозицкий О.Е., Цветков А.А., Павлюков В.М., Моря А.В. – Опубл. 27.11.2005.
Бюл. № 33.
40. Divya.G. Regenerative Braking Using Switched Reluctance Generator / Divya.G.,
Ramani Kalpathi // International Journal of Scientific & Engineering Research, Volume
5, Issue 4, April-2014. Pages 135 –141.
157
41. Патент №2474832 РФ, МПК: G01R31/36. Автоматизированная система
контроля и диагностики аккумуляторных батарей корабельного базирования.
Темирёв А.П., Киселев В.И., Кротенко А.В и др. – Опубл. 10.02.2013. Бюл. № 4.
42. Ясаков Г.С. Корабельные электроэнергетические системы / Г.С. Ясаков. ч.1.
Спб.: Военно-морская академия Кузнецова, 1999. – 640 с.
43. Кононов Г.Н. Тяговый реактивный индукторный двигатель в генераторном
режиме / Г.Н. Кононов., ГЛ. Колпахчьян., А.В. Киреев // Труды научно-теорет.
конф. профессорско-преподавательского состава «Транспорт-2002», апрель 2002 г.
часть 3 г. Ростов-на-Дону, 2002. – С. 50.
44. Лурье М.С. Имитационное моделирование схем преобразовательной техники.
/ М.С. Лурье., О.М. Лурье. – Красноярск, 2007. – 145 c.
45. Темирев А.П. Совершенствование комплекса устройств релейной защиты,
автоматики и диагностики судовых электроэнергетических систем / А.П. Темирев
// Монография, Ростов н/Д: Изд-во Рост.ун-та, 2005. – 150 с.
46. Савченко А.В. Разработка корабельной автоматизированной системы
контроля и диагностики аккумуляторных батарей дизель- электрических
подводных лодок / Савченко Александр Владимирович: дис… канд. техн. наук.–
Санкт Петербург, 2007. – 180с.
47. Абрамов В.И. Анализ сроков службы аккумуляторных батарей в
эксплуатации / В.И. Абрамов., А.А. Сокоров., О.С. Тютрюмов. – 1974, с. 22.
48. Ляпиров К.С. Корабельная автоматизированная система контроля и
диагностирования аккумуляторных батарей / К.С. Ляпиров., А.Е. Федоров., А.В.
Савченко. – Ростов-на-Дону. – 2006. – 137с.
49. Ильинский Н.Ф. Перспективы применения вентильно-индукторного электропривода в
современных технологиях // Электротехника. 1997. – №2. – С. 1– 3.
50. Technische Information / technical information FZ3600R17KE3 [В Интернете].
Available: http://www.bjrtd.com/pdf/fz3600r17ke3.pdf (дата обращения 10.03.2017).
51. Андрей Образцов. Схемотехника DC/DC преобразователей / Андрей
Образцов, Сергей Образцов // Современная электроника. – 2005, № 3. – C. 36–43.
52. Анисимов Я.Ф. Электромагнитная совместимость полупроводниковых
преобразователей и судовых электроустановах / Я.Ф. Анисимов., Е.П. Васильев. –
Л.: Судостроение, 1990. – 264 с.
53. Галка В.Л. Метод системного расчета электропотребителей переменного тока
со статическими преобразователями электроэнергии в составе судовой
электроэнергетической системы / В.Л. Галка., Е.Г. Плахтына., Б.А. Скворцов //
158
Тез. докл. VI Международной научно-технической конференции. «Проблемы
повышения технического уровня электроэнергетических систем и
электрооборудования кораблей, плавучих сооружений и транспортных средств»,
Санкт-Петербург, 12-15 мая 1998 г. – с.14
54. Подпрограмма редактирования и сохранения в энергонезависимой памяти
параметров, используемых в управлении статическим преобразователем М–
П3ПЕТ–25–63 / Луговец В.А., Дерека Л.С., Лозицкий О.Е., и др. // Свидетельство
об официальной регистрации программы для ЭВМ № 2005612316 от 08.09.05.
55. Программа управления блоком силовым статического преобразователя ПП-
70/145./ Лозицкий О.Е., Луговец В. А., Гудев В.А., Жданов К. В.// Свидетельство
об официальной регистрации программы для ЭВМ № 2007612032 от 24.05.07.
56. Программа защиты преобразователя напряжения сети 175 … 320 В
постоянного тока в стабилизированное напряжение 28,5 В постоянного тока для
агрегата бесперебойного питания (ПЗ ПН ПТ-ПТ для АБП) / Федоров А.Е.,
Лозицкий О.Е., Темирев А.П., Павлюков В.М., Цветков А.А. // Свидетельство об
официальной регистрации программы для ЭВМ № 2005612323 от 08.09.05.
57. Программа защиты преобразователя напряжения сети 175 … 320 В
постоянного тока в стабилизированное однофазное напряжение 50 Гц, 230 В
переменного тока для агрегата бесперебойного питания (ПЗ ПН ПТ–ПерТ для
АБП) / Темирев А.П., Лозицкий О.Е., Федоров А.Е., Павлюков В.М., Луговец В.А.
// Свидетельство об официальной регистрации программы для ЭВМ №
2005612277 от 08.09.05.
58. Программа расчета электромагнитых процессов в преобразователе DC/DC с
гальванической развязкой / Лозицкий О.Е., Квятковский И.А. и др. //
Свидетельство об официальной регистрации программы для ЭВМ № 2005612328
от 08.09.05.
59. Программа расчета электромагнитых процессов в преобразователе
DC/DC с гальванической развязкой / Квятковский И.А., Цветков А.А. и др. //
Свидетельство об официальной регистрации программы для
ЭВМ № 2005612328 от 08.09.05.
60. Программа преобразования напряжения сети 175 … 320 В постоянного тока
в стабилизированное напряжение 28,5 В постоянного тока для агрегата
бесперебойного питания (ПН ПТ-ПТ для АБП) / Лозицкий О.Е., Федоров А.Е.,
Цветков А.А. и др. //Свидетельство об официальной регистрации программы для
ЭВМ № 2005612022 от 08.09.05.
159
61. Robin Vujanic. Design and Control of a Buck-Boost DC-DC Power Converter.
Supervision: Dr. S. Mariethoz Prof. M. Morari. Semester Thesis July 2008. – 65p.
62. Квятковский И. А. Проектирование управляемых вентильно-индукторных
двигателей с самовозбуждением / И. А. Квятковский // Новочеркасск: ЗАО
"ИРИС", 2009.
63. Г. 13109-97, «"Электрическая энергия. Совместимость технических средств
электромагнитная. Нормы качества электрической энергии в системах
электроснабжения общего назначения" (введен в действие постановлением
Госстандарта РФ от 28 августа 1998 г. N 338) "».
64. Сюй Синь. Математическая модель батареи литиево-ионных аккумуляторов
/Сюй Синь: Выпускная квалификационная работа магистра. Санкт-Петербург –
М.: 2016. – 70 с.
65. Техническое совершенствование автономного зарядно – разрядного
электротехнического комплекса аккумуляторных батарей подводных аппаратов /
Фам Конг Тао, Константинов Г.Г., Киселев В.И. // Вестник ИрГТУ. – 2018. Том 22,
№ 3. – С. 154–171.
66. Захаров И.Г., Арефьев Я.Д., Воронович Н.А., Лейкин О.Ю. Корабельные
электроэнергетические установки. http://www.bestreferat.ru/referat-8380.html (дата
обращения 10.12.2017)
67. Фам Конг Тао. Комбинированная система охлаждения мобильного
зарядно- разрядного комплекса / Фам Конг Тао., А.В. Анисимов., Е.А . Анисимов., В.Л.
Кондрашев., М.Э. Шошиашвили. и др. // Интеллектуальные электромеханические
системы и комплексы специального назначения : материалы межотраслевого
науч.-техн. семинара, г. Новочеркасск, 10–12 июня 2014г. / Юж.-Рос. гос. политехи.
ун-т (НПИ). – Новочеркасск : ЮРГПУ (НПИ), 2014. – С. 92 – 96.
68. Фам Конг Тао. Сравнительный анализ способов управления в вентильно-
индукторном электроприводе./ Фам Конг Тао., А.А. Цветков., М.Г. Бычков., И.Р. и
др. // Интеллектуальные электромеханические системы и комплексы специального
назначения : материалы межотраслевого науч.-техн. семинара, г. Новочеркасск, 10–
12 июня 2014г. / Юж.-Рос. гос. политехи. ун-т (НПИ). - Новочеркасск : ЮРГПУ
(НПИ), 2014. – С. 20 – 27.
69. Фам Конг Тао. Вентильно-индукторный электропривод для
горнообогатительных комбинатов акционерной компании «АЛРОСА» / Фам Конг
Тао., С.А. Цветков., В.И. Киселев., А.В. Савченко., А.В. Бобров и др. //
Интеллектуальные электромеханические системы и комплексы специального
160
назначения : материалы межотраслевого науч.-техн. семинара, г. Новочеркасск,
10-12 июня 2014г. / Юж.-Рос. гос. политехи. ун-т (НПИ). - Новочеркасск :
ЮРГПУ (НПИ), 2014. – С. 70 –76.
70. Фам Конг Тао. Опыт применения структуры системы управления
вентильными индукторными электроприводами большой мощности двух-
пакетного исполнения мощностью 750 кВт, 1250 квт и 1600 квт / А.В. Бобров.,
Фам Конг Тао., Фам Ван Бьен., А.А. Голиков и др. // Кибернетика энергетических
систем: Сб. материалов XXXVIII сессии Всеросс. науч. семинара по тематике
«Диагностика энергооборудо-вания», г. Новочеркасск, 17–19 окт. 2016г. /
ЮРПУ(НПИ) имени М.И. Платова. - Ново-черкасск: ЮРГПУ(НПИ), 2016. – С.
159 – 171.
71. Фам Конг Тао. Анализ основных характеристик двукпакетного вентильно-
индукторного электродвигателя, работающего в режиме двигателя-генератора /
Фам Конг Тао., А.В. Бобров., Фам Ван Бьен и др. // Кибернетика энергетических
систем: Сб. материалов XXXVIII сессии Всеросс. науч. семинара по тематике
«Диагностика энергооборудования», г. Новочеркасск, 17–19 окт. 2016г. /
ЮРПУ(НПИ) имени М.И. Платова. - Новочеркасск: ЮРГПУ(НПИ), 2016. – С. 138
–150.
72. Фам Конг Тао. Создание системы охлаждения мобильного зарядно-разрядного
комплекса / Анисимов А.В, Фам Конг Тао и др. // Научно техническая
конференция «Научно-техничекская конференция и выставка инновационных
проектов ». – Новочеркасск: ЮРГПУ(НПИ), 14–16 декабря 2014г. – С. 94–95.
73. Фам Конг Тао. Компьютерная модель преобразователя для зарядно –
разрядного комплекса аккумуляторных батарей/ Фам Конг Тао., Константинов
Г.Г., Киселев В.И // Научный журнал «Вестник Иркутского государственного
технического университета». – 2018. Том 22, № 2. – С. 107–122.
74. Нгуен Зуй Тиен. Принцип двигателя внутреннего сгорания. / Нгуен Зуй
Тиен // https://vi.scribd.com/document/16760950 (дата обращения 10.12.2015).
75. Бычков М. Г. Основы теории, управление и проектирование вентильно-
индукторного электропривода / М. Г. Бычков.: Дисс. на соискание ученой степени
д–ра техн. наук. – М.: 1999. – 354 с.
76. Бычков М.Г. Элементы теории вентильно-индукторного электропривода /
М.Г Бычков // Электричество, 1997, №8, С. 35 – 44.
161
77. Методика экспериментального определения электромагнитных параметров
Вентильно- индукторной электромашины большой мощности // Практическая
силовая электроника/ Фам Конг Тао., Фам Ван Бьен, Костинский С.С. и др. –
2018. № 3(71). – С. 16–20.
78. Веретенников Л.П. Исследование процессов в судовых
электроэнергетических системах. Теория и методы / Л.П. Веретенников. – Л.
Судостроение, 1975. – 375 с.
79. Губанов Ю.А. Исследование динамики функционирования систем
управления корабельными электроэнергетическими системами / Ю.А. Губанов //
Учебное пособие. – СПб.: ГМТУ, 1999. – 98 с.
80. Kannan Kaliyappan. PI-CCC Based Switched Reluctance Generator Applications
for Wind Power Generation Using MATLAB/SIMULINK. / Kannan Kaliyappan.,
Sutha Padmanabhan // Journal of Electrical Engineering and Technology. Vol. 8, No. 2.
2013. Pages 230-237.
81. Jawad Faiz . Design of switched reluctance machine for starter/generator of hybrid
electric vehicle./ Jawad Faiz ., K. Moayed-Zadeh // Electric Power Systems Research.
Volume 75, Issues 2–3, August 2005, Pages 153–160.
82. B Ganjia. Modeling and analysis of switched reluctance generator using finite ele-
ment method./ B Ganjia., M. Heidariana, J. Faiz // Ain Shams Engineering Journal.
August 2014. http://www.researchgate.net/publication/266320168.
83. Zhenguo Li. High-efficiency Operation of Switched Reluctance Generator based
on Current Waveform Control. / Zhenguo Li., Siyang Yu., Jin-Woo Ahn // Journal of
International Conference on Electrical Machines and Systems Vol. 2, No.1 , Pages 120–
126 , 2013. http://dx.doi.org/10.11142/jicems.2013.2.1.120.
84. Single-Channel SCALE Plug-and-Play IGBT Driver http://www.mouser.com
/ds/2/328/ 1SD536F2-FZ3600R17KE3-612681.pdf (дата обращения 06.12.2016).
85. Киреев А.В. Разработка алгоритмов эффективного управления тяговым
вентильно-индукторным электроприводом электропоезда / А.В. Киреев. Дис.
канд.техн. наук – Новочеркасск, 2004 г. – 187 с.
86. Ю.Н. Кормилицин. Проблемы проектирования и эксплуатации подводных лодок
/ Ю.Н.Кормилицина // Сб. науч. трудов под ред. – СПб.: ВМИИ, 2002. – 312 с.
87. Программа расчета скорости и угла поворота ротора ВИД / Темирев А.П.,
Луговец В.А., Лозицкий О.Е., Цветков А.А., Моря А.В., Павлюков В.М. //
Свидетельство об официальной регистрации программы для ЭВМ № 2005612313 от 08.09.05.
162
88. Дядик А.Н. Корабельные воздухонезависимые энергетические установки /
Дядик А.Н., Замуков В.В., Дядик В.А. – СПб: Судостроение, 2006. – 424с.
89. Силовая электроника в бортовых системах электроснабжения и
электроприводах / Материалы межотраслевого научно-технического семинара,
посвященного 40-летию совместной научно-технической деятельности РСПКБ-
ПКП «ИРИС» и НПО «Аврора», г. Новочеркасск, 2003./ Новочеркасск: Юж.-Рос.
гос. техн. ун-т. – Новочеркасск: Ред журнала «Известия вузов. Электромеханика»,
2004. – 177 с.
90. Темирев А.П. Разработка и создание элементов интегрированных
корабельных электротехнических систем / А.П. Темирев. – Ростов н/Д: Изд-во
Ростовск. ун-та, 2005. – 546с.
91. Квятковский И.А., Проектирование управляемых вентильно-индукторных
двигателей с самовозбуждением / И.А. Квятковский // Новочеркасск: ЗАО
"ИРИС", 2009. – 168 с
92. Вопросы проектирования подводных лодок. Электроэнергетические системы /
Под ред. Соколова В.С. – СПб.: Изд. ЦКБ МТ «Рубин», 2000.
93. «Дизельная электростанция CTM MT.1650» [В Интернете]. Available:
http://www.allgen.ru/ctm/1258 (дата обращения 20.12.2015).
94. Схема спасательного подводного аппарата [В Интернете]. Available:
http://www.armsexpo.ru/news/armed_forces/poiskovo_spasatelnyy_apparat_bester_1_d
ostavlen_na_tikhookeanskiy_flot/ (дата обращения 10.01.2018).
95. Программа управления блоком датчиков тока и напряжения аккумуляторных
батарей / Лозицкий О.Е., Луговец В.А., Гудев В.А., Жданов К. В. // Свидетельство
об официальной регистрации программы для ЭВМ № 2007612029 от 24.05.07.
96. Пат. №2025836. МПК Н01М10/48. Устройство для контроля
аккумуляторной батареи. Гольдштейн А.И., Рейнгардт Р.В., Федотов В.И.,
Феоктистов В.П. Опубл – 1994, Бюл. № 38.
97. Пат. 1383306 СССР. МПК G 05 В 23/02. Устройство для автоматизированного
контроля электрических параметров РЭА. В.С. Самохин., А.И. Чугунов., Д.С. Кравец и
др. Опубл – 23.03.1988, Бюл. №11.
98. Пат. 2106679 РФ, МПК G 05 В 23/02. Устройство контроля параметроов.
Ваньков Л.М ., Лапшина Г.В., Политов С.В., Безушкин Г.И., Кравцов Л.Я. Опубл
– 1998, Бюл. № 7.
163
99. Дасоян М.А., Агуф И.А. Современная теория свинцового аккумулятора. Л.:
Энергия, 1975.
100. Никифоров Б.В. Новые источники электроэнергии для неатомных подводных
лодок / Б.В. Никифоров., В.С. Соколов., А.В. Юрин // Судостроение, 2000. №5. –
С. 14 – 17.
101. Бабаев А.И. Стартерные свинцово-кислотные аккумуляторные батареи / А.И.
Бабаев // М.: Воениздат, 1967. 172 с.
102. Фам Конг Тао. Расчет и моделирование системы охлаждения мобильного
зарядно-разрядного комплекса / Фам Конг Тао., Фам Ван Вьен // Международный
научно-исследовательский журнал успехи современной науки и образования. №11,
Том 2, – 2016. – С. 85 – 92.
103. dsPIC30F6010 Data Sheet High-Performance Digital Signal Controllers.
http://ww1.microchip.com/downloads/en/DeviceDoc/70119d.pdf.
104. Вентильно-индукторный электропривод: современное состояние и
перспективы развития // Рынок электротехники. – 2007. – №4. С. 71 – 78.
105. Ляпидов К.С. Корабельная автоматизированная система контроля и
диагностирования аккумуляторных батарей / К.С. Ляпидов., А.Е. Федоров., А.В.
Савченко // Ростов-на-Дону. – Л. Судостроение, 2006. – 121 с .
106. Пат. 2106679 РФ, МПК G 05 В 23/02. Зарядно-разрядное устройство с
рекуперацией электроэнергии в корабельную сеть. Капустин И.В; Киселев В.И;
Никифоров Б.В; Прасолин А.П; Темирев АП. Опубл – 2013 Бюл. № 31.
107. Пат. 2377157 РФ, МПК 8 H 02 J 1/00. Электроэнергетическая система
перспективных дизель-электрических подводных лодок с мониторингом
состояния аккумуляторных батарей. Ляпидов К.С; Анисимов А.В; Матвиенко И.Н;
Савченко А.В; Федоров А.Е; Темирев А.П; Горобец А.В. – Опубл. 27.12.2009. Бюл.
№ 36.
108. Пат. 2038264 РФ , МПК 8 B 63 H 23/24. Электроэнергетическая силовая
установка судна. Фиясь И.П; Иванов А.В. Опубл – 27.06.1995, Государственная
морская академия им. адмирала С.О. Макарова)
109. В.М. Корчанов. Интеграция систем управления техническими средствами
перспективных ДПЛ. / Корчанов В.М; Киселев; В.Ю Герман Сус //– Журнал
«Военный парад», 2006, – № 5. – С. 44– 46.
110. Программа управления блоком силовым статического преобразователя ПП-
70/145 / Лозицкий О.Е., Луговец В. А., Гудев В.А., Жданов К. В. // Свидетельство
об официальной регистрации программы для ЭВМ № 2007612032 от 24.05.07.
164
111. Устройство зарядное автоматизированное УЗА-150-80. [В Интернете].
Available: http://www.electromodul.ru/produkcziya/zaryadnyie-ustrojstva/seriya-tpe-
tpp/uza-150-80 (дата обращения 10.10.2014).
112. Карзов Б.Н. Понижающе-повышающий преобразователь с малыми
перенапряжениями на полупроводниковых компонентах для ККМ с
универсальным входом / Б. Н. Карзов, М. Ю. Кастров, Д. В. // Практическая
силовая электроника. – №1(33), 2009. – С. 6 – 12.
113. http://www.ulstu.ru/main/view/article/13825(дата обращения 10.01.2019).
114. Нгуен Куанг Кхоа. Исследование электромеханического комплекса:
вентильно - индукторный электропривод-центробежный насос / Нгуен Куанг Кхоа
// Известия высших учебных заведений. Электромеханика. – 2016. – № 4. – С. 55–64.
115. Абакумов М.И. Обзор современных средств заряда и разряда
аккумуляторных батарей / Абакумов М.И., Савченко А.В. // Актуальные
проблемы гуманитарных и естественных наук. – 2015. – № 7-4. – С. 31–33.
116. Сучков Р.В. Разработка зарядного устройства для групповой зарядки
аккумуляторных батарей транспортных средств / Сучков Роман Валерьевич:
дис… канд. техн. наук.– Москва, 2001. – 125с.
117. Темирев А.П. Разработка проблемно-ориентированных компонентов
электротехнических комплексов дизель-электрической подводной лодки и систем
управления ими / Темирев Алексей Петрович: Дис… док-ра техн. наук. –
Новочеркасск. –2006.- 466с.
118. Темирёв А.П. Перспективы применения вентильных индукторных
электроприводов на горнообогатительных комбинатах акционерной компании
"алроса" / Темирёв А.П., Птах Г.К., Анисимов А.В. и др. // Известия высших
учебных заведений. Электромеханика. – 2009. – № 2. – С. 42–50.
119. Пахомин С.А. Развитие теории и практика проектирования
энергосберегающих вентильно-индукторных электроприводов / Пахомин Сергей
Александрович: Дис… док-ра техн. наук. – Новочеркасск. –2001.- 386с.
120. Фам Ван Бьен. Методика математического и экспериментального
определения энергетических параметров вентильно-индукторного двигателя 1600
квт частотой 1000 мин-1 двухпакетной конструкции / Фам ван бьен // Новое в
российской электроэнергетике . – 2017. – № 11. – С. 67–76.
121. Шаркович Р.П. Оптимизация устройства балансировки Li-ion аккумулятор-
ной батареи для гибридных автомобилей и электромобилей / Шаркович Р.П //
Новое в российской электроэнергетике . – 2016. – № 4. – С. 38–44.
122. Пат. 102999 РФ. Стенд для диагностирования автоматической коробки
переключения передач транспортного средства / Алексеенко И.В., Булгаков А.Г. –
Опубл. 2011.
165
123. Тюхтин К.И. Разработка электротехнологии и преобразователя
электроэнергии для регенеративного заряда аккумуляторов мобильной
сельскохозяйственной техники / Тюхтин Константин Иванович: дис… канд. техн.
наук.– Москва, 2011. – 205с.
124. Васильев А.М. Информационно-измерительная система управления
бесперебойным электропитанием сложного технического объекта / Васильев А.М.,
Олейников Н.А. // Научно-технический вестник поволжья. – 2007. – № 6 (27). – С.
204–207.
125. Новиков А.А. Повышение эффективности информационно-измерительных
и управляющих систем агрегатов бесперебойного электропитания автономных
объектов / Новиков Александр Анатольевич: дис… канд. техн. наук.– Москва,
2011. – 172с.
166
ПРИЛОЖЕНИЕ А. Акты внедрения
ПРИЛОЖЕНИЕ а.1. Акт внедрения результатов диссертационной работы от
ЗАО «ИРИС»
167
168
ПРИЛОЖЕНИЕ а.2. Акт внедрения результатов диссертационной работы от
Научного Института Энергетики при ВАНТ
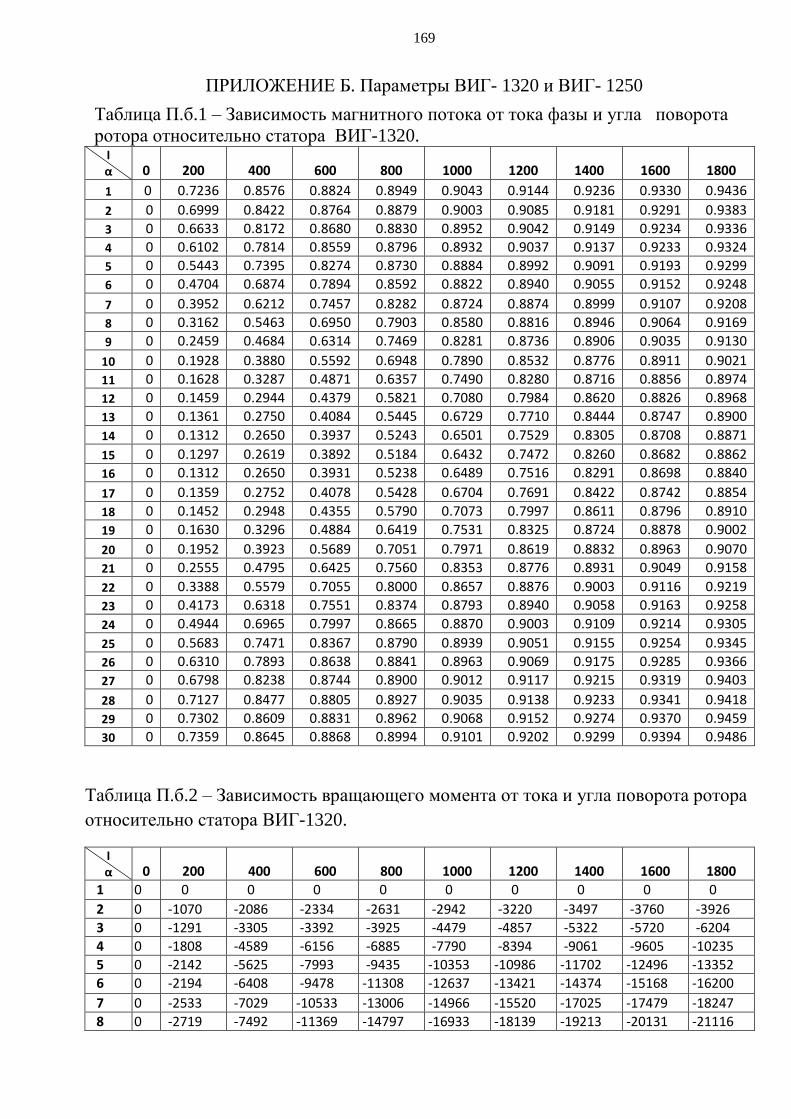
169
ПРИЛОЖЕНИЕ Б. Параметры ВИГ- 1320 и ВИГ- 1250
Таблица П.б.1 – Зависимость магнитного потока от тока фазы и угла поворота
ротора относительно статора ВИГ-1320. I α 0 200 400 600 800 1000 1200 1400 1600 1800
1 0 0.7236 0.8576 0.8824 0.8949 0.9043 0.9144 0.9236 0.9330 0.9436
2 0 0.6999 0.8422 0.8764 0.8879 0.9003 0.9085 0.9181 0.9291 0.9383
3 0 0.6633 0.8172 0.8680 0.8830 0.8952 0.9042 0.9149 0.9234 0.9336
4 0 0.6102 0.7814 0.8559 0.8796 0.8932 0.9037 0.9137 0.9233 0.9324
5 0 0.5443 0.7395 0.8274 0.8730 0.8884 0.8992 0.9091 0.9193 0.9299
6 0 0.4704 0.6874 0.7894 0.8592 0.8822 0.8940 0.9055 0.9152 0.9248
7 0 0.3952 0.6212 0.7457 0.8282 0.8724 0.8874 0.8999 0.9107 0.9208
8 0 0.3162 0.5463 0.6950 0.7903 0.8580 0.8816 0.8946 0.9064 0.9169
9 0 0.2459 0.4684 0.6314 0.7469 0.8281 0.8736 0.8906 0.9035 0.9130
10 0 0.1928 0.3880 0.5592 0.6948 0.7890 0.8532 0.8776 0.8911 0.9021
11 0 0.1628 0.3287 0.4871 0.6357 0.7490 0.8280 0.8716 0.8856 0.8974
12 0 0.1459 0.2944 0.4379 0.5821 0.7080 0.7984 0.8620 0.8826 0.8968
13 0 0.1361 0.2750 0.4084 0.5445 0.6729 0.7710 0.8444 0.8747 0.8900
14 0 0.1312 0.2650 0.3937 0.5243 0.6501 0.7529 0.8305 0.8708 0.8871
15 0 0.1297 0.2619 0.3892 0.5184 0.6432 0.7472 0.8260 0.8682 0.8862
16 0 0.1312 0.2650 0.3931 0.5238 0.6489 0.7516 0.8291 0.8698 0.8840
17 0 0.1359 0.2752 0.4078 0.5428 0.6704 0.7691 0.8422 0.8742 0.8854
18 0 0.1452 0.2948 0.4355 0.5790 0.7073 0.7997 0.8611 0.8796 0.8910
19 0 0.1630 0.3296 0.4884 0.6419 0.7531 0.8325 0.8724 0.8878 0.9002
20 0 0.1952 0.3923 0.5689 0.7051 0.7971 0.8619 0.8832 0.8963 0.9070
21 0 0.2555 0.4795 0.6425 0.7560 0.8353 0.8776 0.8931 0.9049 0.9158
22 0 0.3388 0.5579 0.7055 0.8000 0.8657 0.8876 0.9003 0.9116 0.9219
23 0 0.4173 0.6318 0.7551 0.8374 0.8793 0.8940 0.9058 0.9163 0.9258
24 0 0.4944 0.6965 0.7997 0.8665 0.8870 0.9003 0.9109 0.9214 0.9305
25 0 0.5683 0.7471 0.8367 0.8790 0.8939 0.9051 0.9155 0.9254 0.9345
26 0 0.6310 0.7893 0.8638 0.8841 0.8963 0.9069 0.9175 0.9285 0.9366
27 0 0.6798 0.8238 0.8744 0.8900 0.9012 0.9117 0.9215 0.9319 0.9403
28 0 0.7127 0.8477 0.8805 0.8927 0.9035 0.9138 0.9233 0.9341 0.9418
29 0 0.7302 0.8609 0.8831 0.8962 0.9068 0.9152 0.9274 0.9370 0.9459
30 0 0.7359 0.8645 0.8868 0.8994 0.9101 0.9202 0.9299 0.9394 0.9486
Таблица П.б.2 – Зависимость вращающего момента от тока и угла поворота ротора
относительно статора ВИГ-1320.
I α 0 200 400 600 800 1000 1200 1400 1600 1800
1 0 0 0 0 0 0 0 0 0 0
2 0 -1070 -2086 -2334 -2631 -2942 -3220 -3497 -3760 -3926
3 0 -1291 -3305 -3392 -3925 -4479 -4857 -5322 -5720 -6204
4 0 -1808 -4589 -6156 -6885 -7790 -8394 -9061 -9605 -10235
5 0 -2142 -5625 -7993 -9435 -10353 -10986 -11702 -12496 -13352
6 0 -2194 -6408 -9478 -11308 -12637 -13421 -14374 -15168 -16200
7 0 -2533 -7029 -10533 -13006 -14966 -15520 -17025 -17479 -18247
8 0 -2719 -7492 -11369 -14797 -16933 -18139 -19213 -20131 -21116
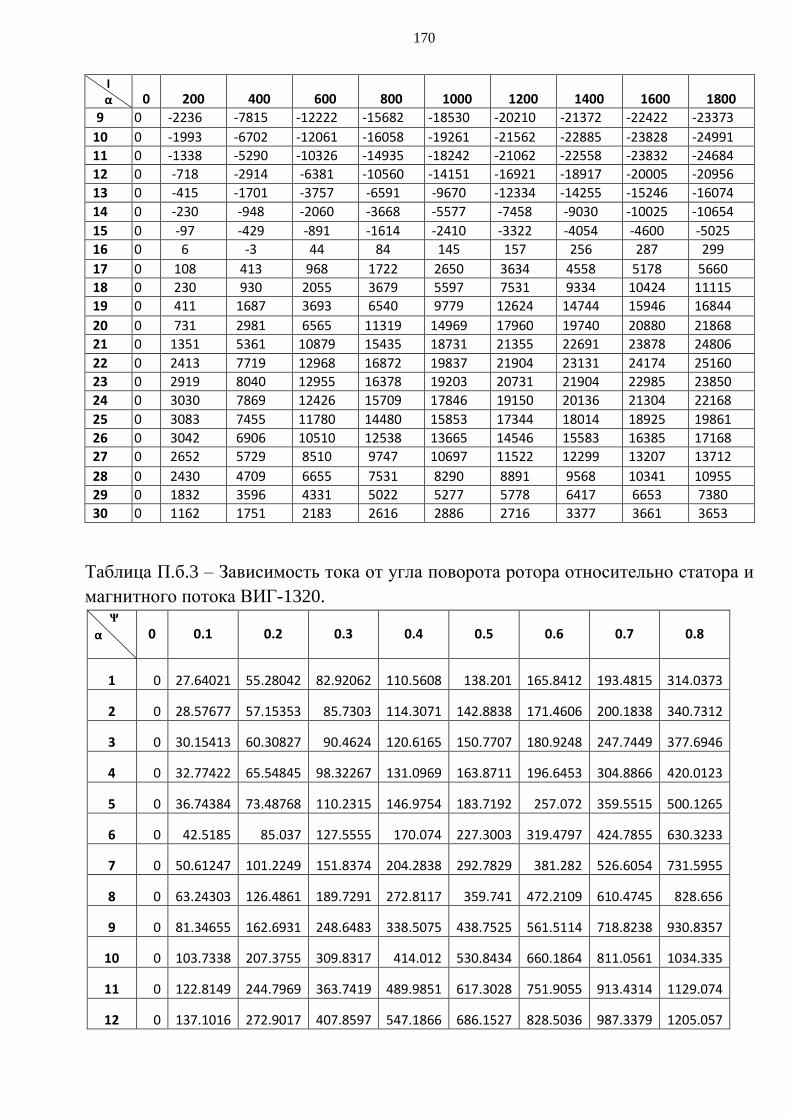
170
I α 0 200 400 600 800 1000 1200 1400 1600 1800
9 0 -2236 -7815 -12222 -15682 -18530 -20210 -21372 -22422 -23373
10 0 -1993 -6702 -12061 -16058 -19261 -21562 -22885 -23828 -24991
11 0 -1338 -5290 -10326 -14935 -18242 -21062 -22558 -23832 -24684
12 0 -718 -2914 -6381 -10560 -14151 -16921 -18917 -20005 -20956
13 0 -415 -1701 -3757 -6591 -9670 -12334 -14255 -15246 -16074
14 0 -230 -948 -2060 -3668 -5577 -7458 -9030 -10025 -10654
15 0 -97 -429 -891 -1614 -2410 -3322 -4054 -4600 -5025
16 0 6 -3 44 84 145 157 256 287 299
17 0 108 413 968 1722 2650 3634 4558 5178 5660
18 0 230 930 2055 3679 5597 7531 9334 10424 11115
19 0 411 1687 3693 6540 9779 12624 14744 15946 16844
20 0 731 2981 6565 11319 14969 17960 19740 20880 21868
21 0 1351 5361 10879 15435 18731 21355 22691 23878 24806
22 0 2413 7719 12968 16872 19837 21904 23131 24174 25160
23 0 2919 8040 12955 16378 19203 20731 21904 22985 23850
24 0 3030 7869 12426 15709 17846 19150 20136 21304 22168
25 0 3083 7455 11780 14480 15853 17344 18014 18925 19861
26 0 3042 6906 10510 12538 13665 14546 15583 16385 17168
27 0 2652 5729 8510 9747 10697 11522 12299 13207 13712
28 0 2430 4709 6655 7531 8290 8891 9568 10341 10955
29 0 1832 3596 4331 5022 5277 5778 6417 6653 7380
30 0 1162 1751 2183 2616 2886 2716 3377 3661 3653
Таблица П.б.3 – Зависимость тока от угла поворота ротора относительно статора и
магнитного потока ВИГ-1320. Ψ
α 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8
1 0 27.64021 55.28042 82.92062 110.5608 138.201 165.8412 193.4815 314.0373
2 0 28.57677 57.15353 85.7303 114.3071 142.8838 171.4606 200.1838 340.7312
3 0 30.15413 60.30827 90.4624 120.6165 150.7707 180.9248 247.7449 377.6946
4 0 32.77422 65.54845 98.32267 131.0969 163.8711 196.6453 304.8866 420.0123
5 0 36.74384 73.48768 110.2315 146.9754 183.7192 257.072 359.5515 500.1265
6 0 42.5185 85.037 127.5555 170.074 227.3003 319.4797 424.7855 630.3233
7 0 50.61247 101.2249 151.8374 204.2838 292.7829 381.282 526.6054 731.5955
8 0 63.24303 126.4861 189.7291 272.8117 359.741 472.2109 610.4745 828.656
9 0 81.34655 162.6931 248.6483 338.5075 438.7525 561.5114 718.8238 930.8357
10 0 103.7338 207.3755 309.8317 414.012 530.8434 660.1864 811.0561 1034.335
11 0 122.8149 244.7969 363.7419 489.9851 617.3028 751.9055 913.4314 1129.074
12 0 137.1016 272.9017 407.8597 547.1866 686.1527 828.5036 987.3379 1205.057
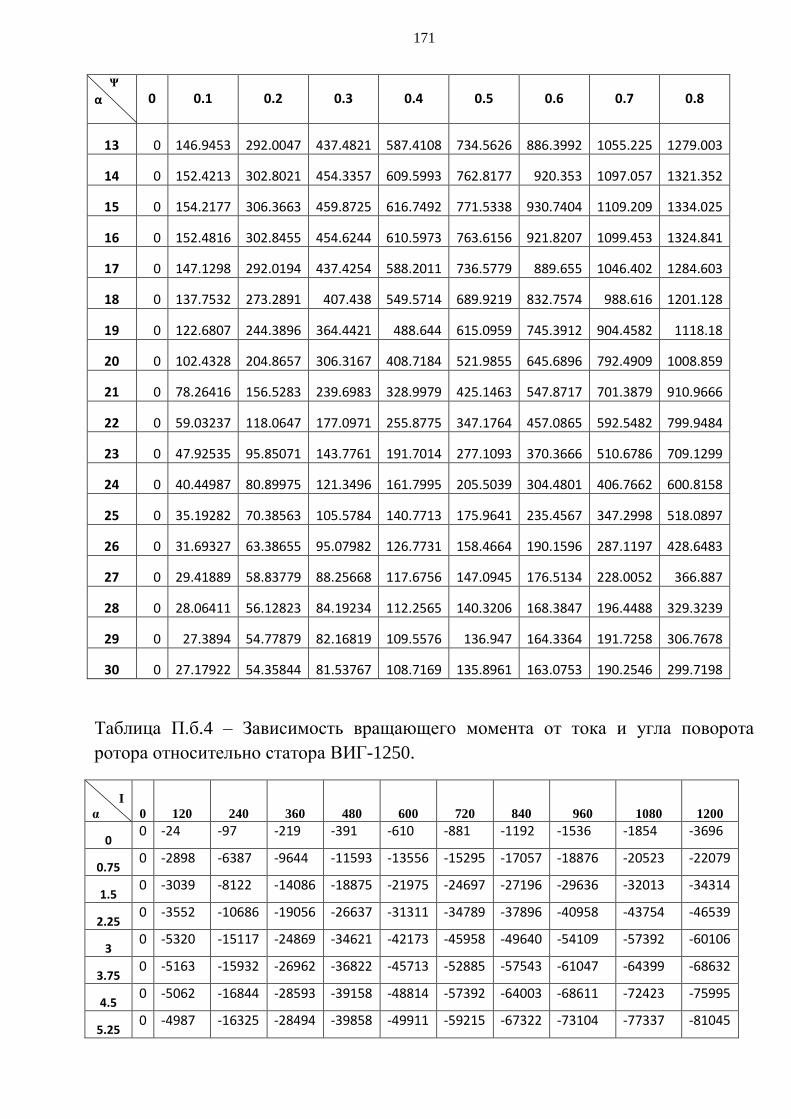
171
Ψ
α 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8
13 0 146.9453 292.0047 437.4821 587.4108 734.5626 886.3992 1055.225 1279.003
14 0 152.4213 302.8021 454.3357 609.5993 762.8177 920.353 1097.057 1321.352
15 0 154.2177 306.3663 459.8725 616.7492 771.5338 930.7404 1109.209 1334.025
16 0 152.4816 302.8455 454.6244 610.5973 763.6156 921.8207 1099.453 1324.841
17 0 147.1298 292.0194 437.4254 588.2011 736.5779 889.655 1046.402 1284.603
18 0 137.7532 273.2891 407.438 549.5714 689.9219 832.7574 988.616 1201.128
19 0 122.6807 244.3896 364.4421 488.644 615.0959 745.3912 904.4582 1118.18
20 0 102.4328 204.8657 306.3167 408.7184 521.9855 645.6896 792.4909 1008.859
21 0 78.26416 156.5283 239.6983 328.9979 425.1463 547.8717 701.3879 910.9666
22 0 59.03237 118.0647 177.0971 255.8775 347.1764 457.0865 592.5482 799.9484
23 0 47.92535 95.85071 143.7761 191.7014 277.1093 370.3666 510.6786 709.1299
24 0 40.44987 80.89975 121.3496 161.7995 205.5039 304.4801 406.7662 600.8158
25 0 35.19282 70.38563 105.5784 140.7713 175.9641 235.4567 347.2998 518.0897
26 0 31.69327 63.38655 95.07982 126.7731 158.4664 190.1596 287.1197 428.6483
27 0 29.41889 58.83779 88.25668 117.6756 147.0945 176.5134 228.0052 366.887
28 0 28.06411 56.12823 84.19234 112.2565 140.3206 168.3847 196.4488 329.3239
29 0 27.3894 54.77879 82.16819 109.5576 136.947 164.3364 191.7258 306.7678
30 0 27.17922 54.35844 81.53767 108.7169 135.8961 163.0753 190.2546 299.7198
Таблица П.б.4 – Зависимость вращающего момента от тока и угла поворота
ротора относительно статора ВИГ-1250.
I
α 0 120 240 360 480 600 720 840 960 1080 1200
0 0 -24 -97 -219 -391 -610 -881 -1192 -1536 -1854 -3696
0.75 0 -2898 -6387 -9644 -11593 -13556 -15295 -17057 -18876 -20523 -22079
1.5 0 -3039 -8122 -14086 -18875 -21975 -24697 -27196 -29636 -32013 -34314
2.25 0 -3552 -10686 -19056 -26637 -31311 -34789 -37896 -40958 -43754 -46539
3 0 -5320 -15117 -24869 -34621 -42173 -45958 -49640 -54109 -57392 -60106
3.75 0 -5163 -15932 -26962 -36822 -45713 -52885 -57543 -61047 -64399 -68632
4.5 0 -5062 -16844 -28593 -39158 -48814 -57392 -64003 -68611 -72423 -75995
5.25 0 -4987 -16325 -28494 -39858 -49911 -59215 -67322 -73104 -77337 -81045
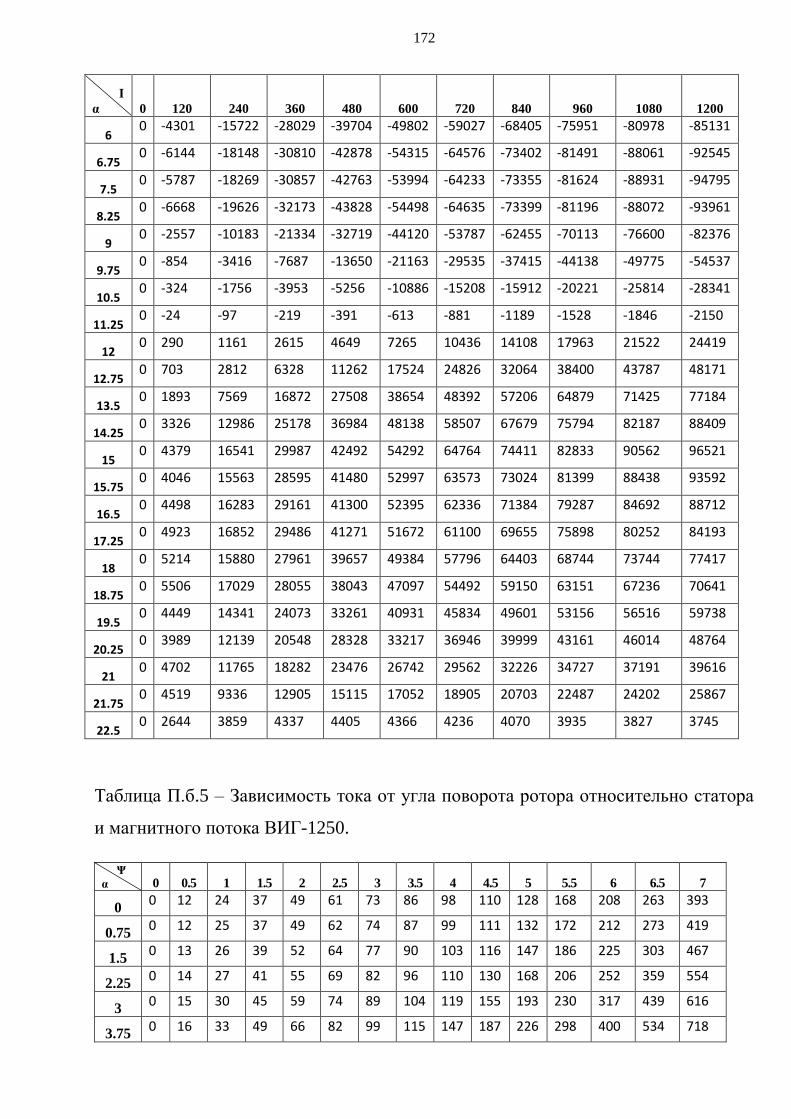
172
I
α 0 120 240 360 480 600 720 840 960 1080 1200
6 0 -4301 -15722 -28029 -39704 -49802 -59027 -68405 -75951 -80978 -85131
6.75 0 -6144 -18148 -30810 -42878 -54315 -64576 -73402 -81491 -88061 -92545
7.5 0 -5787 -18269 -30857 -42763 -53994 -64233 -73355 -81624 -88931 -94795
8.25 0 -6668 -19626 -32173 -43828 -54498 -64635 -73399 -81196 -88072 -93961
9 0 -2557 -10183 -21334 -32719 -44120 -53787 -62455 -70113 -76600 -82376
9.75 0 -854 -3416 -7687 -13650 -21163 -29535 -37415 -44138 -49775 -54537
10.5 0 -324 -1756 -3953 -5256 -10886 -15208 -15912 -20221 -25814 -28341
11.25 0 -24 -97 -219 -391 -613 -881 -1189 -1528 -1846 -2150
12 0 290 1161 2615 4649 7265 10436 14108 17963 21522 24419
12.75 0 703 2812 6328 11262 17524 24826 32064 38400 43787 48171
13.5 0 1893 7569 16872 27508 38654 48392 57206 64879 71425 77184
14.25 0 3326 12986 25178 36984 48138 58507 67679 75794 82187 88409
15 0 4379 16541 29987 42492 54292 64764 74411 82833 90562 96521
15.75 0 4046 15563 28595 41480 52997 63573 73024 81399 88438 93592
16.5 0 4498 16283 29161 41300 52395 62336 71384 79287 84692 88712
17.25 0 4923 16852 29486 41271 51672 61100 69655 75898 80252 84193
18 0 5214 15880 27961 39657 49384 57796 64403 68744 73744 77417
18.75 0 5506 17029 28055 38043 47097 54492 59150 63151 67236 70641
19.5 0 4449 14341 24073 33261 40931 45834 49601 53156 56516 59738
20.25 0 3989 12139 20548 28328 33217 36946 39999 43161 46014 48764
21 0 4702 11765 18282 23476 26742 29562 32226 34727 37191 39616
21.75 0 4519 9336 12905 15115 17052 18905 20703 22487 24202 25867
22.5 0 2644 3859 4337 4405 4366 4236 4070 3935 3827 3745
Таблица П.б.5 – Зависимость тока от угла поворота ротора относительно статора
и магнитного потока ВИГ-1250.
Ψ
α 0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5 5.5 6 6.5 7
0 0 12 24 37 49 61 73 86 98 110 128 168 208 263 393
0.75 0 12 25 37 49 62 74 87 99 111 132 172 212 273 419
1.5 0 13 26 39 52 64 77 90 103 116 147 186 225 303 467
2.25 0 14 27 41 55 69 82 96 110 130 168 206 252 359 554
3 0 15 30 45 59 74 89 104 119 155 193 230 317 439 616
3.75 0 16 33 49 66 82 99 115 147 187 226 298 400 534 718
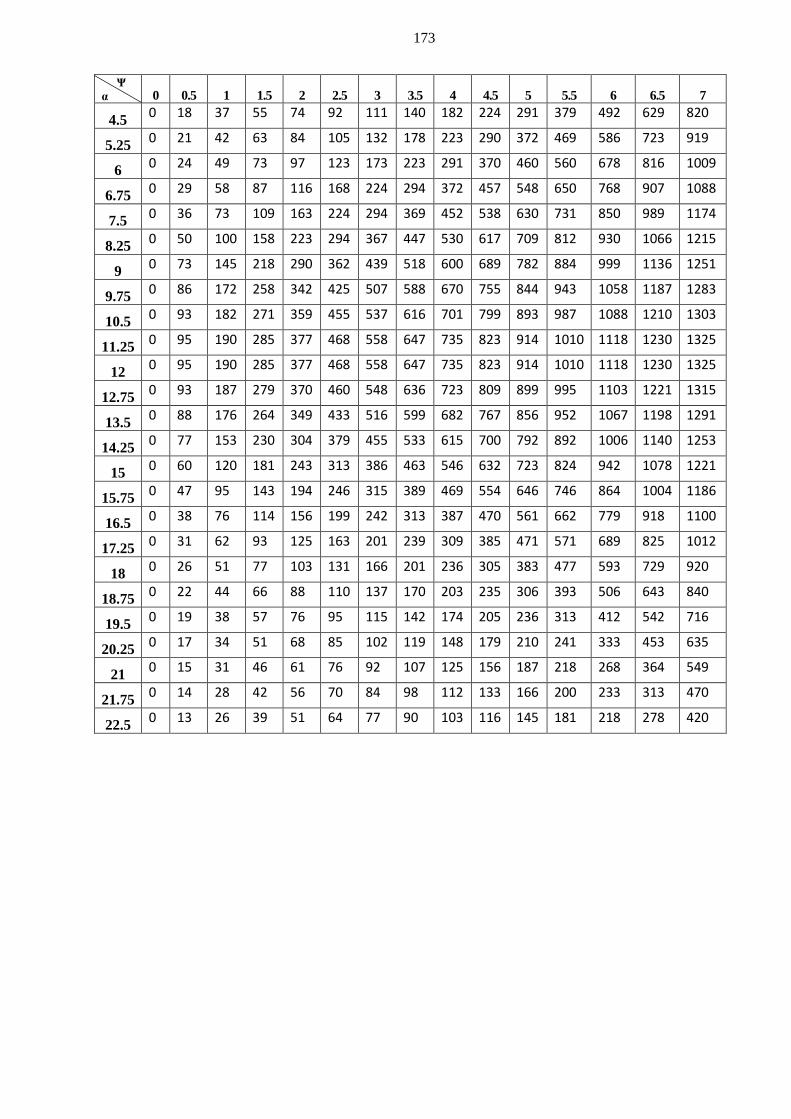
173
Ψ
α 0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5 5.5 6 6.5 7
4.5 0 18 37 55 74 92 111 140 182 224 291 379 492 629 820
5.25 0 21 42 63 84 105 132 178 223 290 372 469 586 723 919
6 0 24 49 73 97 123 173 223 291 370 460 560 678 816 1009
6.75 0 29 58 87 116 168 224 294 372 457 548 650 768 907 1088
7.5 0 36 73 109 163 224 294 369 452 538 630 731 850 989 1174
8.25 0 50 100 158 223 294 367 447 530 617 709 812 930 1066 1215
9 0 73 145 218 290 362 439 518 600 689 782 884 999 1136 1251
9.75 0 86 172 258 342 425 507 588 670 755 844 943 1058 1187 1283
10.5 0 93 182 271 359 455 537 616 701 799 893 987 1088 1210 1303
11.25 0 95 190 285 377 468 558 647 735 823 914 1010 1118 1230 1325
12 0 95 190 285 377 468 558 647 735 823 914 1010 1118 1230 1325
12.75 0 93 187 279 370 460 548 636 723 809 899 995 1103 1221 1315
13.5 0 88 176 264 349 433 516 599 682 767 856 952 1067 1198 1291
14.25 0 77 153 230 304 379 455 533 615 700 792 892 1006 1140 1253
15 0 60 120 181 243 313 386 463 546 632 723 824 942 1078 1221
15.75 0 47 95 143 194 246 315 389 469 554 646 746 864 1004 1186
16.5 0 38 76 114 156 199 242 313 387 470 561 662 779 918 1100
17.25 0 31 62 93 125 163 201 239 309 385 471 571 689 825 1012
18 0 26 51 77 103 131 166 201 236 305 383 477 593 729 920
18.75 0 22 44 66 88 110 137 170 203 235 306 393 506 643 840
19.5 0 19 38 57 76 95 115 142 174 205 236 313 412 542 716
20.25 0 17 34 51 68 85 102 119 148 179 210 241 333 453 635
21 0 15 31 46 61 76 92 107 125 156 187 218 268 364 549
21.75 0 14 28 42 56 70 84 98 112 133 166 200 233 313 470
22.5 0 13 26 39 51 64 77 90 103 116 145 181 218 278 420
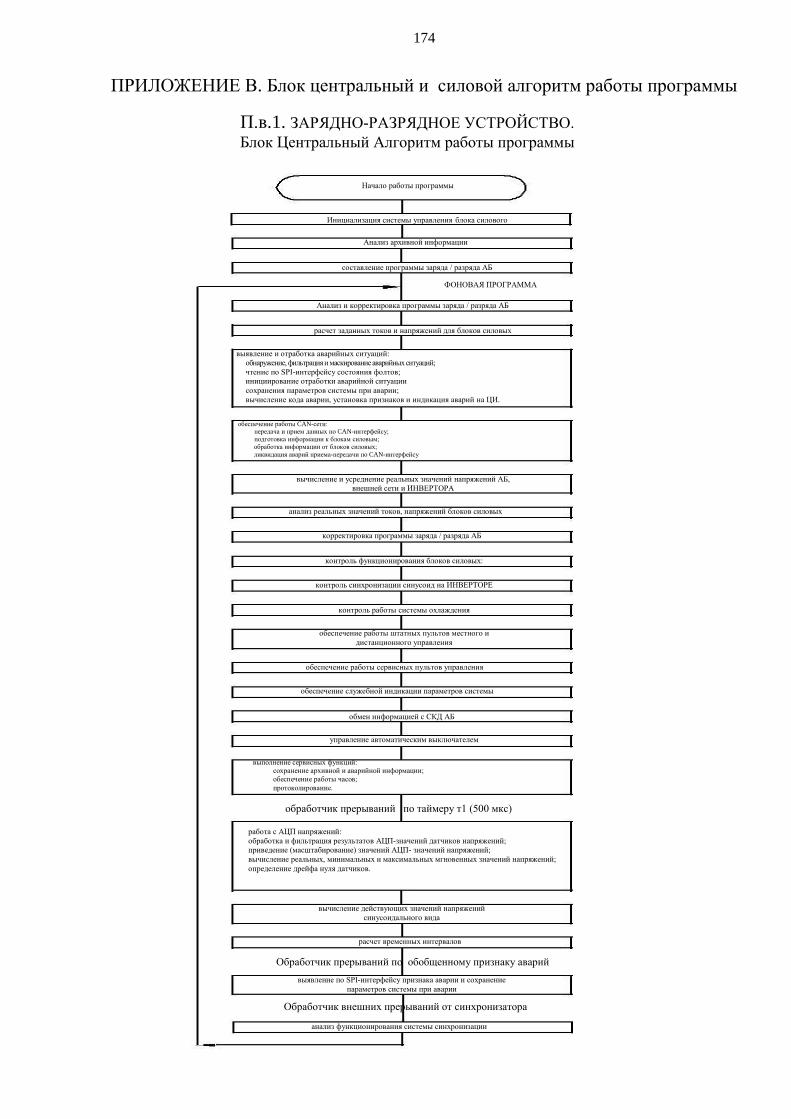
174
ПРИЛОЖЕНИЕ В. Блок центральный и силовой алгоритм работы программы
Начало работы программы
Инициализация системы управления блока силового
Анализ архивной информации
составление программы заряда / разряда АБ
ФОНОВАЯ ПРОГРАММА
Анализ и корректировка программы заряда / разряда АБ
расчет заданных токов и напряжений для блоков силовых
выявление и отработка аварийных ситуаций:
обнаружение, фильтрация и маскирование аварийных ситуаций;
чтение по SPI-интерфейсу состояния фолтов;
инициирование отработки аварийной ситуации
сохранения параметров системы при аварии;
вычисление кода аварии, установка признаков и индикация аварий на ЦИ.
обеспечение работы CAN-сети: передача и прием данных по CAN-интерфейсу;
подготовка информации к блокам силовым;
обработка информации от блоков силовых;
ликвидация аварий приема-передачи по CAN-интерфейсу
вычисление и усреднение реальных значений напряжений АБ,
внешней сети и ИНВЕРТОРА
анализ реальных значений токов, напряжений блоков силовых
корректировка программы заряда / разряда АБ
контроль функционирования блоков силовых:
контроль синхронизации синусоид на ИНВЕРТОРЕ
контроль работы системы охлаждения
обеспечение работы штатных пультов местного и
дистанционного управления
обеспечение работы сервисных пультов управления
обеспечение служебной индикации параметров системы
обмен информацией с СКД АБ
управление автоматическим выключателем
выполнение сервисных функций: сохранение архивной и аварийной информации;
обеспечение работы часов;
протоколирование.
обработчик прерываний по таймеру т1 (500 мкс)
работа с АЦП напряжений:
обработка и фильтрация результатов АЦП-значений датчиков напряжений;
приведение (масштабирование) значений АЦП- значений напряжений;
вычисление реальных, минимальных и максимальных мгновенных значений напряжений;
определение дрейфа нуля датчиков.
вычисление действующих значений напряжений
синусоидального вида
Обработчик прерываний по обобщенному признаку аварий
расчет временных интервалов
выявление по SPI-интерфейсу признака аварии и сохранение
параметров системы при аварии
Обработчик внешних прерываний от синхронизатора
анализ функционирования системы синхронизации
П.в.1. ЗАРЯДНО-РАЗРЯДНОЕ УСТРОЙСТВО.
Блок Центральный Алгоритм работы программы
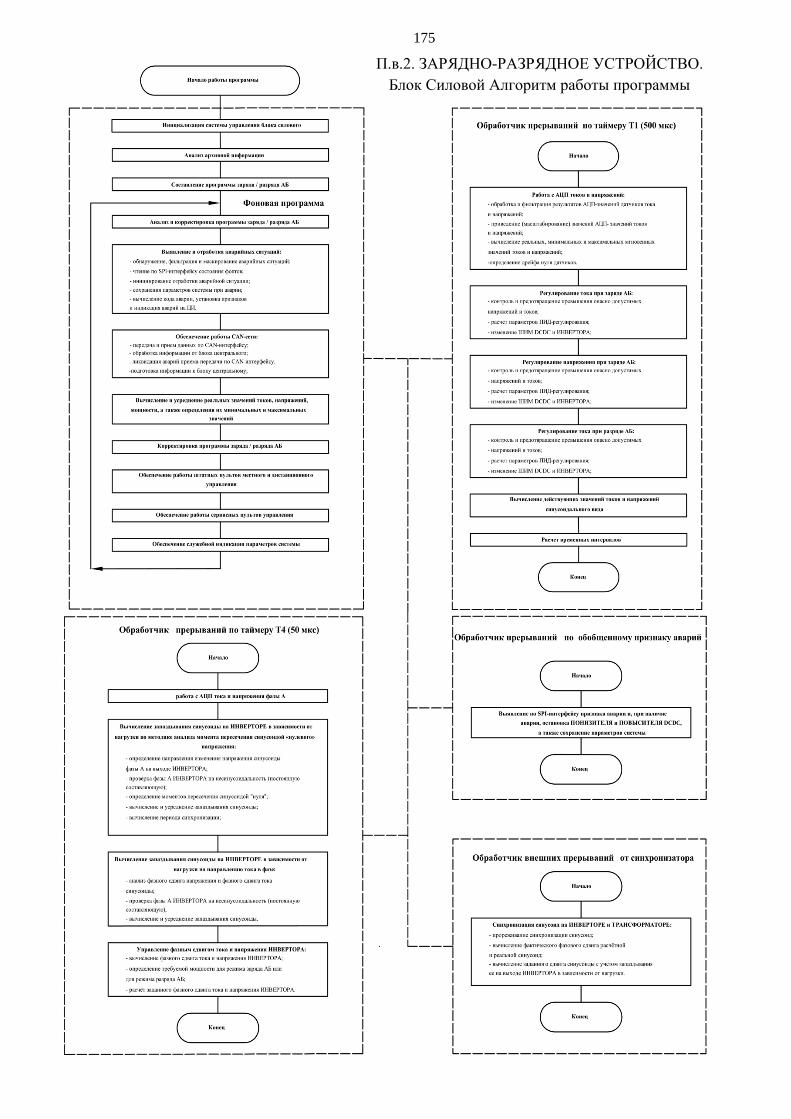
175
П.в.2. ЗАРЯДНО-РАЗРЯДНОЕ УСТРОЙСТВО.
Блок Силовой Алгоритм работы программы
176
ПРИЛОЖЕНИЕ Г. Алгоритм зарядно- разрядного комплекса
Алгоритм работы программы
Начало работы программы
инициализация системы управления блока центрального
анализ архивной информации
составление программы заряда / разряда АБ
Фоновая программа
анализ и корректировка программы заряда / разряда АБ
расчёт заданных токов и напряжений для блоков силовых
выявление и отработка аварийных ситуаций:
обнаружение, фильтрация и маскирование аварийных ситуаций;
чтение по SPI-интерфейсу состояния фолтов;
инициирование отработки аварийной ситуации;
сохранения параметров системы при аварии;
вычисление кода аварии, установка признаков и индикация аварий на ЦИ.
обеспечение работы CAN-сети:
передача и приём данных по CAN-интерфейсу;
подготовка информации к блокам силовым;
обработка информации от блоков силовых;
ликвидация аварий приёма-передачи по CAN-интерфейсу.
вычисление и усреднение реальных значений напряжений АБ, внешней сети
и ИНВЕРТОРА
анализ реальных значений токов, напряжений блоков силовых
корректировка программы заряда / разряда АБ
контроль функционирования блоков силовых:
контроль синхронизации синусоид на ИНВЕРТОРЕ:
контроль работы системы охлаждения
обеспечение работы штатных пультов местного и дистанционного
управления
обеспечение работы сервисных пультов управления
обеспечение служебной индикации параметров системы
обмен информацией с СКД АБ
управление автоматическим выключателем
выполнение сервисных функций:
сохранение архивной и аварийной информации;
177
обеспечение работы часов;
протоколирование.
Обработчик прерываний по таймеру Т1 (50 мкс)
работа с АЦП напряжений:
обработка и фильтрация результатов АЦП-значений датчиков напряжений;
приведение (масштабирование) значений АЦП- значений напряжений;
вычисление реальных, минимальных и максимальных мгновенных значений
токов и напряжений;
определение дрейфа нуля датчиков.
вычисление действующих значений напряжений синусоидального вида
расчёт временных интервалов
Обработчик прерываний по обобщённому признаку аварий
выявление по SPI-интерфейсу признака аварии и сохранение параметров
системы при аварии
Обработчик внешних прерываний от синхронизатора;
анализ функционирования системы синхронизации.
Алгоритм силового блока представлена в приложение 2
Алгоритм работы программы
Начало работы программы
инициализация системы управления блока силового
анализ архивной информации
составление программы заряда / разряда АБ
Фоновая программа
анализ и корректировка программы заряда / разряда АБ
выявление и отработка аварийных ситуаций:
обнаружение, фильтрация и маскирование аварийных ситуаций;
чтение по SPI-интерфейсу состояния фолтов;
инициирование отработки аварийной ситуации;
сохранения параметров системы при аварии;
вычисление кода аварии, установка признаков и индикация аварий на ЦИ.
обеспечение работы CAN-сети:
передача и приём данных по CAN-интерфейсу;
обработка информации от блока центрального;
178
подготовка информации к блоку центральному;
ликвидация аварий приёма-передачи по CAN-интерфейсу.
вычисление и усреднение реальных значений токов, напряжений, мощности,
а также определения их минимальных и максимальных значений
корректировка программы заряда / разряда АБ
обеспечение работы штатных пультов местного и дистанционного
управления
обеспечение работы сервисных пультов управления
обеспечение служебной индикации параметров системы
выполнение сервисных функций:
сохранение архивной и аварийной информации;
обеспечение работы часов;
протоколирование.
Обработчик прерываний по таймеру Т1 (500 мкс)
работа с АЦП токов и напряжений:
обработка и фильтрация результатов АЦП-значений датчиков тока и
напряжений;
приведение (масштабирование) значений АЦП- значений токов и
напряжений;
вычисление реальных, минимальных и максимальных мгновенных значений
токов и напряжений;
определение дрейфа нуля датчиков.
регулирование тока при заряде АБ:
контроль и предотвращение превышения опасно допустимых напряжений и
токов;
расчёт параметров ПИД-регулирования;
изменение ШИМ DCDC и ИНВЕРТОРА;
регулирование напряжения при заряде АБ:
контроль и предотвращение превышения опасно допустимых напряжений и
токов;
расчёт параметров ПИД-регулирования;
изменение ШИМ DCDC и ИНВЕРТОРА.
регулирование тока при разряде АБ:
контроль и предотвращение превышения опасно допустимых напряжений и
токов;
расчёт параметров ПИД-регулирования;
изменение ШИМ DCDC и ИНВЕРТОРА.
вычисление действующих значений токов и напряжений синусоидального
179
вида расчёт временных интервалов
Обработчик прерываний по обобщённому признаку аварий
выявление по SPI-интерфейсу признака аварии и, при наличие аварии,
остановка ПОНИЗИТЕЛЯ и ПОВЫСИТЕЛЯ DCDC, а также сохранение
параметров системы
Обработчик внешних прерываний от синхронизатора;
синхронизация синусоид на ИНВЕРТОРЕ:
прореживание синхронизации синусоид;
вычисление фактического фазового сдвига расчётной и реальной синусоид;
вычисление заданного сдвига синусоиды с учетом запаздывания её на
выходе ИНВЕРТОРА в зависимости от нагрузки.
Обработчик прерываний по таймеру Т4 (50 мкс)
работа с АЦП тока и напряжения фазы А
вычисление запаздывания синусоиды на ИНВЕРТОРЕ в зависимости от
нагрузки по методике анализа момента пересечения синусоидой «нулевого»
напряжения:
определение направления изменения напряжения синусоиды фазы А на
выходе ИНВЕРТОРА;
проверка фазы А ИНВЕРТОРА на несинусоидальность (постоянную
составляющую);
определение моментов пересечения синусоидой "нуля";
вычисление и усреднение запаздывания синусоиды;
вычисление периода синхронизации;
вычисление запаздывания синусоиды на ИНВЕРТОРЕ в зависимости от
нагрузки по направлению тока в фазе:
анализ фазного сдвига напряжения и фазного сдвига тока синусоиды;
проверка фазы А ИНВЕРТОРА на несинусоидальность (постоянную
составляющую);
вычисление и усреднение запаздывания синусоиды.
управление фазным сдвигом тока и напряжения ИНВЕРТОРА:
вычисление фазного сдвига тока и напряжения ИНВЕРТОРА;
определение требуемой мощности для режима заряда АБ или для режима
разряда АБ;
расчёт заданного фазного сдвига тока и напряжения ИНВЕРТОРА.
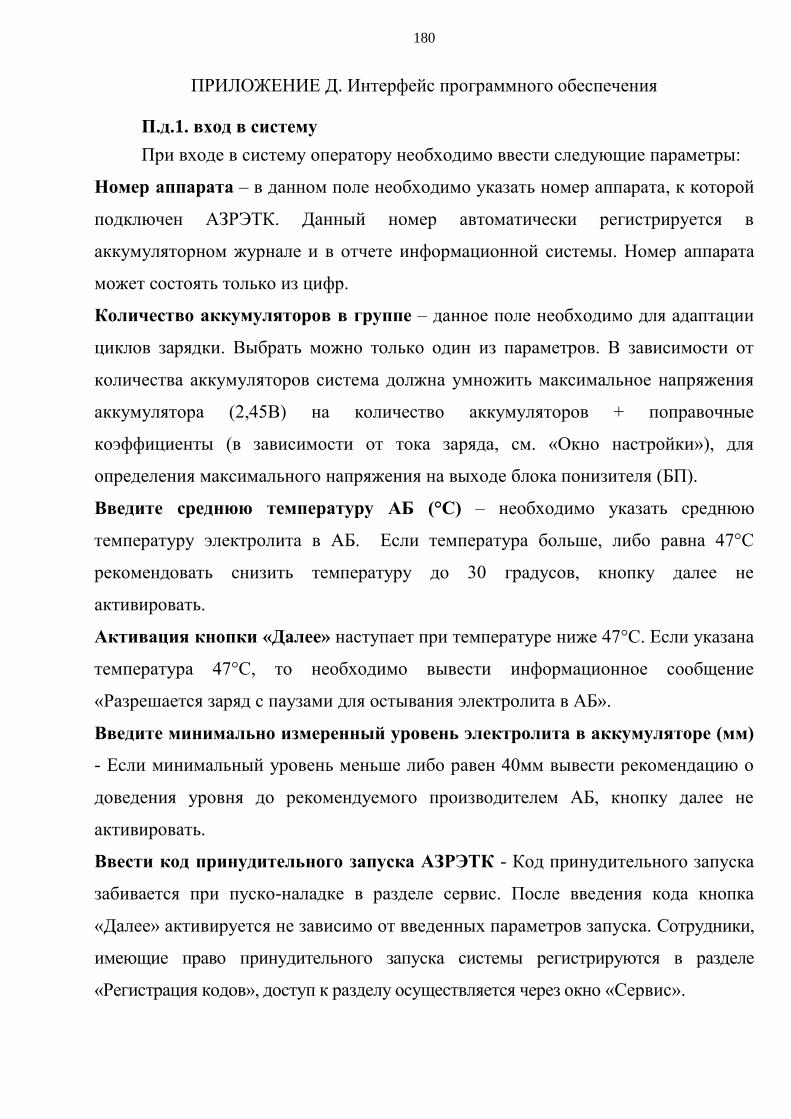
180
ПРИЛОЖЕНИЕ Д. Интерфейс программного обеспечения
П.д.1. вход в систему
При входе в систему оператору необходимо ввести следующие параметры:
Номер аппарата – в данном поле необходимо указать номер аппарата, к которой
подключен АЗРЭТК. Данный номер автоматически регистрируется в
аккумуляторном журнале и в отчете информационной системы. Номер аппарата
может состоять только из цифр.
Количество аккумуляторов в группе – данное поле необходимо для адаптации
циклов зарядки. Выбрать можно только один из параметров. В зависимости от
количества аккумуляторов система должна умножить максимальное напряжения
аккумулятора (2,45В) на количество аккумуляторов + поправочные
коэффициенты (в зависимости от тока заряда, см. «Окно настройки»), для
определения максимального напряжения на выходе блока понизителя (БП).
Введите среднюю температуру АБ (°С) – необходимо указать среднюю
температуру электролита в АБ. Если температура больше, либо равна 47°С
рекомендовать снизить температуру до 30 градусов, кнопку далее не
активировать.
Активация кнопки «Далее» наступает при температуре ниже 47°С. Если указана
температура 47°С, то необходимо вывести информационное сообщение
«Разрешается заряд с паузами для остывания электролита в АБ».
Введите минимально измеренный уровень электролита в аккумуляторе (мм)
- Если минимальный уровень меньше либо равен 40мм вывести рекомендацию о
доведения уровня до рекомендуемого производителем АБ, кнопку далее не
активировать.
Ввести код принудительного запуска АЗРЭТК - Код принудительного запуска
забивается при пуско-наладке в разделе сервис. После введения кода кнопка
«Далее» активируется не зависимо от введенных параметров запуска. Сотрудники,
имеющие право принудительного запуска системы регистрируются в разделе
«Регистрация кодов», доступ к разделу осуществляется через окно «Сервис».
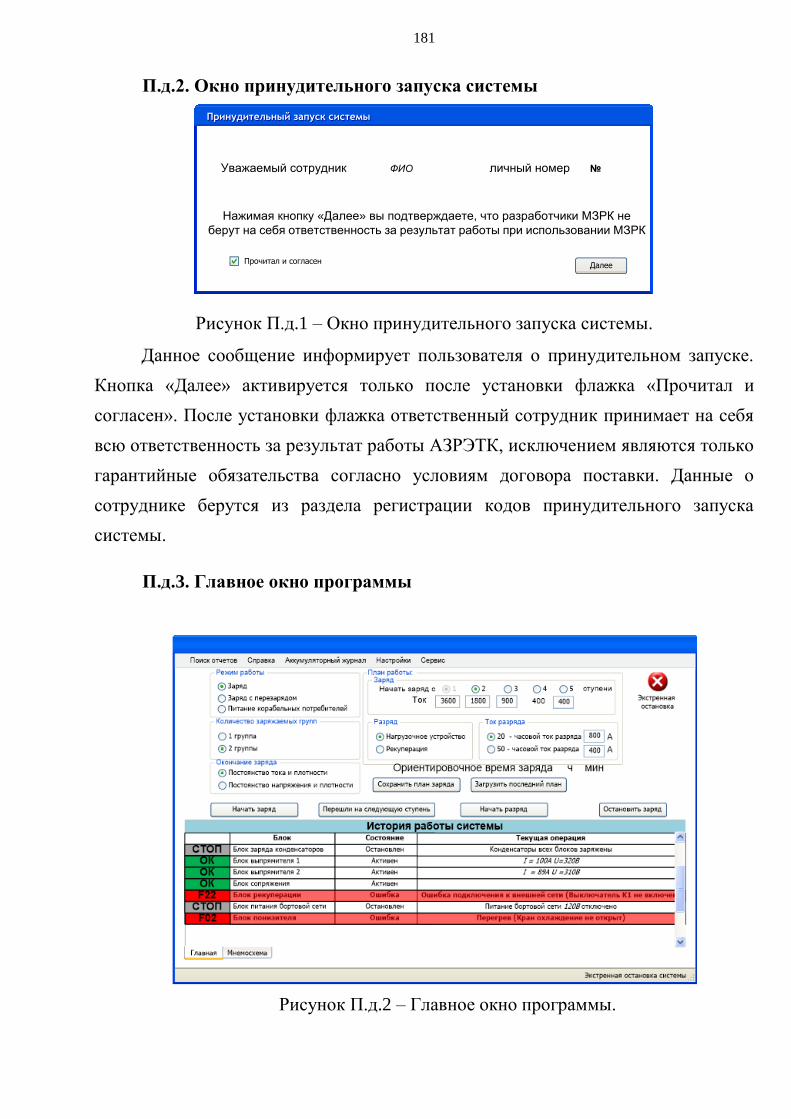
181
П.д.2. Окно принудительного запуска системы
Принудительный запуск системыПринудительный запуск системы
Нажимая кнопку «Далее» вы подтверждаете, что разработчики МЗРК не
берут на себя ответственность за результат работы при использовании МЗРК
Уважаемый сотрудник ФИО личный номер №
ДалееПрочитал и согласен
Рисунок П.д.1 – Окно принудительного запуска системы.
Данное сообщение информирует пользователя о принудительном запуске.
Кнопка «Далее» активируется только после установки флажка «Прочитал и
согласен». После установки флажка ответственный сотрудник принимает на себя
всю ответственность за результат работы АЗРЭТК, исключением являются только
гарантийные обязательства согласно условиям договора поставки. Данные о
сотруднике берутся из раздела регистрации кодов принудительного запуска
системы.
П.д.3. Главное окно программы
Рисунок П.д.2 – Главное окно программы.
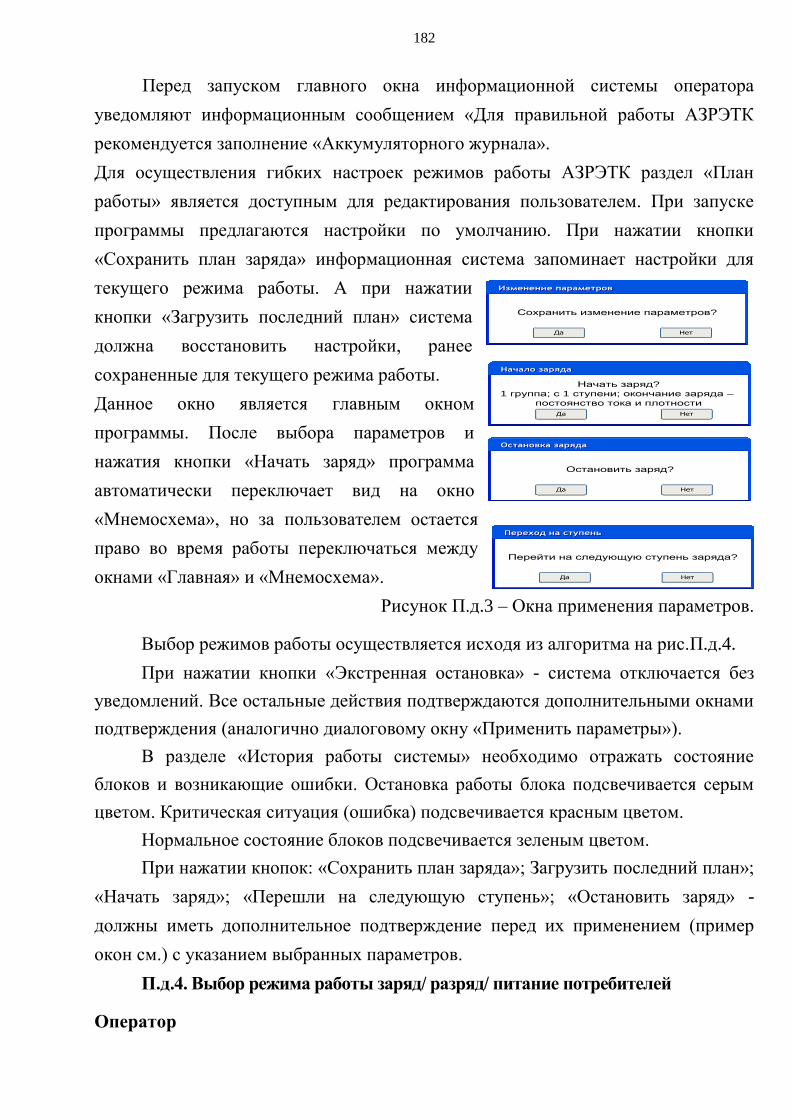
182
Изменение параметровИзменение параметров
Сохранить изменение параметров?
Да Нет
Начало зарядаНачало заряда
Начать заряд?
1 группа; с 1 ступени; окончание заряда –
постоянство тока и плотности
Да Нет
Остановка зарядаОстановка заряда
Остановить заряд?
Да Нет
Переход на ступеньПереход на ступень
Перейти на следующую ступень заряда?
Да Нет
Перед запуском главного окна информационной системы оператора
уведомляют информационным сообщением «Для правильной работы АЗРЭТК
рекомендуется заполнение «Аккумуляторного журнала».
Для осуществления гибких настроек режимов работы АЗРЭТК раздел «План
работы» является доступным для редактирования пользователем. При запуске
программы предлагаются настройки по умолчанию. При нажатии кнопки
«Сохранить план заряда» информационная система запоминает настройки для
текущего режима работы. А при нажатии
кнопки «Загрузить последний план» система
должна восстановить настройки, ранее
сохраненные для текущего режима работы.
Данное окно является главным окном
программы. После выбора параметров и
нажатия кнопки «Начать заряд» программа
автоматически переключает вид на окно
«Мнемосхема», но за пользователем остается
право во время работы переключаться между
окнами «Главная» и «Мнемосхема».
Рисунок П.д.3 – Окна применения параметров.
Выбор режимов работы осуществляется исходя из алгоритма на рис.П.д.4.
При нажатии кнопки «Экстренная остановка» - система отключается без
уведомлений. Все остальные действия подтверждаются дополнительными окнами
подтверждения (аналогично диалоговому окну «Применить параметры»).
В разделе «История работы системы» необходимо отражать состояние
блоков и возникающие ошибки. Остановка работы блока подсвечивается серым
цветом. Критическая ситуация (ошибка) подсвечивается красным цветом.
Нормальное состояние блоков подсвечивается зеленым цветом.
При нажатии кнопок: «Сохранить план заряда»; Загрузить последний план»;
«Начать заряд»; «Перешли на следующую ступень»; «Остановить заряд» -
должны иметь дополнительное подтверждение перед их применением (пример
окон см.) с указанием выбранных параметров.
П.д.4. Выбор режима работы заряд/ разряд/ питание потребителей
Оператор
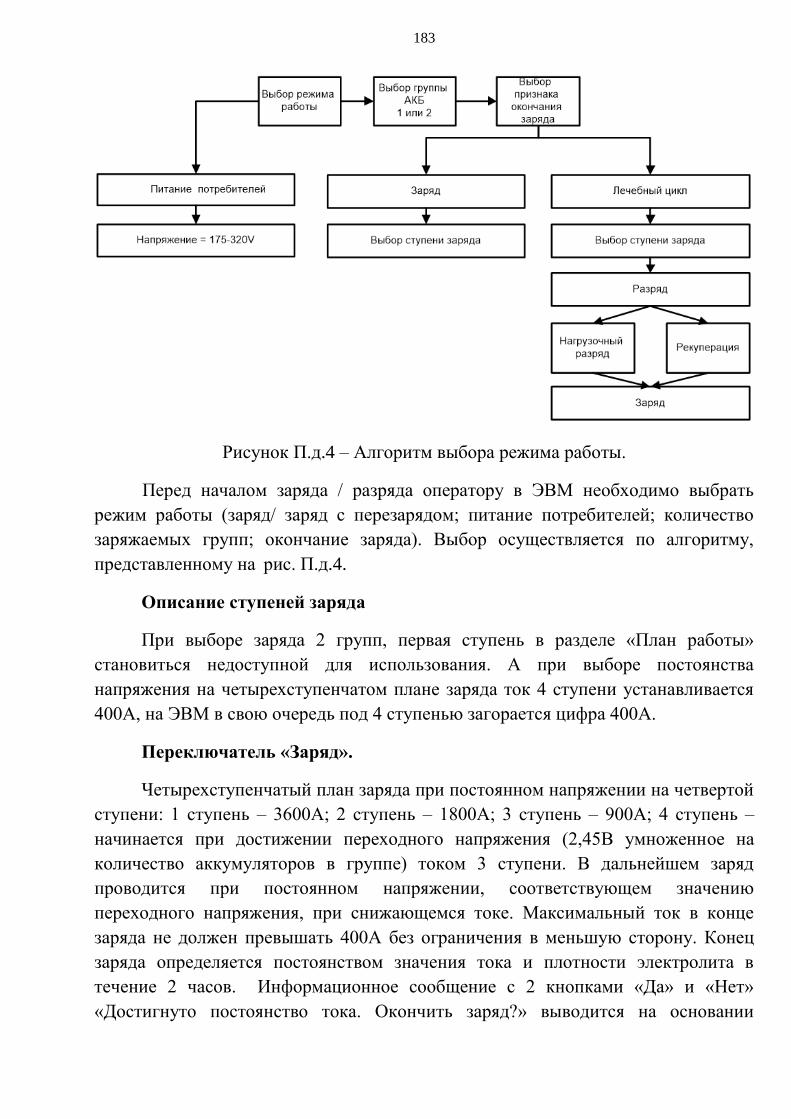
183
Рисунок П.д.4 – Алгоритм выбора режима работы.
Перед началом заряда / разряда оператору в ЭВМ необходимо выбрать
режим работы (заряд/ заряд с перезарядом; питание потребителей; количество
заряжаемых групп; окончание заряда). Выбор осуществляется по алгоритму,
представленному на рис. П.д.4.
Описание ступеней заряда
При выборе заряда 2 групп, первая ступень в разделе «План работы»
становиться недоступной для использования. А при выборе постоянства
напряжения на четырехступенчатом плане заряда ток 4 ступени устанавливается
400А, на ЭВМ в свою очередь под 4 ступенью загорается цифра 400А.
Переключатель «Заряд».
Четырехступенчатый план заряда при постоянном напряжении на четвертой
ступени: 1 ступень – 3600А; 2 ступень – 1800А; 3 ступень – 900А; 4 ступень –
начинается при достижении переходного напряжения (2,45В умноженное на
количество аккумуляторов в группе) током 3 ступени. В дальнейшем заряд
проводится при постоянном напряжении, соответствующем значению
переходного напряжения, при снижающемся токе. Максимальный ток в конце
заряда не должен превышать 400А без ограничения в меньшую сторону. Конец
заряда определяется постоянством значения тока и плотности электролита в
течение 2 часов. Информационное сообщение с 2 кнопками «Да» и «Нет»
«Достигнуто постоянство тока. Окончить заряд?» выводится на основании
184
данных аккумуляторного журнала или датчиков тока и напряжения блока
понизителя. Если в сообщении нажата кнопка «Да», то необходимо остановить
заряд. Если нажата кнопка «Нет», заряд необходимо продолжить. Отключение
заряда осуществляется вручную оператором.
Примечание. Допускается заряд сниженным начальным током до 2400А
включительно. Время заряда соответственно увеличивается. При неработающей
системе водяного охлаждения допускаются перерывы в заряде, чтобы не
допускать повышение температуры электролита выше 47 градусов Цельсия.
При достижении этого напряжения перезаряд продолжить при постоянном
напряжении (2,5В на аккумулятор) путем снижения тока. Система отслеживает
данные параметры путем установки переключателей аккумуляторов в группе в
окне входа в систему и записям в аккумуляторном журнале.
Если в аккумуляторном журнале перед началом заряда зафиксированы
значения снятой емкости, плотности и температуры, то рекомендовать начальную
ступень заряда в соответствии с таблицей 1.5.
Таблица П.д.1- Ориентировочная длительность ступеней на различных режимах заряда
Режим заряда Длительность ступени, ч
Ступени 1 2 3 4 5
Четырехступенчатый при постоянном
напряжении на четвертой ступени 4 1,25 1 6 8
Четырехступенчатый при постоянном токе на
четвертой ступени 4 1,25 1 10 8
Ориентировочные длительности ступеней на различных режимах заряда
представлены в таблице П.д.1. При достижении данного времени система должны
выдать информационное сообщение «Достигнуто ориентировочное время заряда,
проверьте параметры АБ для перехода на другую ступень или отключения
заряда». При оценке времени для многоступенчатых планов заряда, время
суммируется. Также ориентировочное время окончания заряда отображается в
главном окне программы.
«Заряд с перезарядом» (лечебный цикл)
Данный план работы производится в соответствии с алгоритмом,
приведенным на схеме П.д.4.
185
Для настройки плана необходимо выбрать направление энергии разряда
(раздел «Разряд» флажки «Нагрузочное устройство» или «Рекуперация»), а также
ток разряда (раздел «Ток разряда» флажки «20 часовой или 50 часовой ток
разряда») с указанием номинального тока разряда (по умолчанию установлено
400А и 800А соответственно).
Заряд
При данном плане «Заряд с перезарядом» используется типовой
четырехступенчатый план заряда с выбором признака окончания заряда по
постоянству тока и плотности или напряжения и плотности. При достижении
признака окончания заряда система должна выдать сообщение «Достигнуто
постоянство напряжения (тока). Окончить заряд и перейти в режим разряда?».
Если выбрана кнопка сообщения «Ок», то заряд АБ останавливается и оператору
выводится дополнительное информационное сообщение «Для остановки заряда и
перехода в режим разряда необходимо нажать кнопку «Перешли на следующую
ступень».
Разряд
Для начала разряда необходимо нажать кнопку «Начать разряд». После
нажатия кнопки необходимо вывести информационное сообщение «Подтвердите
начало разряда током ….А с рекуперацией/ на нагрузочное устройство». Если
выбрано «Да», то необходимо запустить разряд. Если выбрано «Нет» то система
остается в режиме ожидания дальнейших команд.
Перезаряд
Использование 5 ступени: перезаряд, 1ч отдых, 1 час заряд при I=400А.
Цикл повторяется 3 раза.
Продолжить перезаряд по окончании заряда при постоянном значении тока
400А в течение 3 часов. После каждого перезаряда делать паузы длительностью 1
час при исключении разрядов во время перерывов.
Если в группе аккумуляторов (при входе в систему установлено значение
«аккумуляторов в группе» перезаряд ведется током 400А до достижения
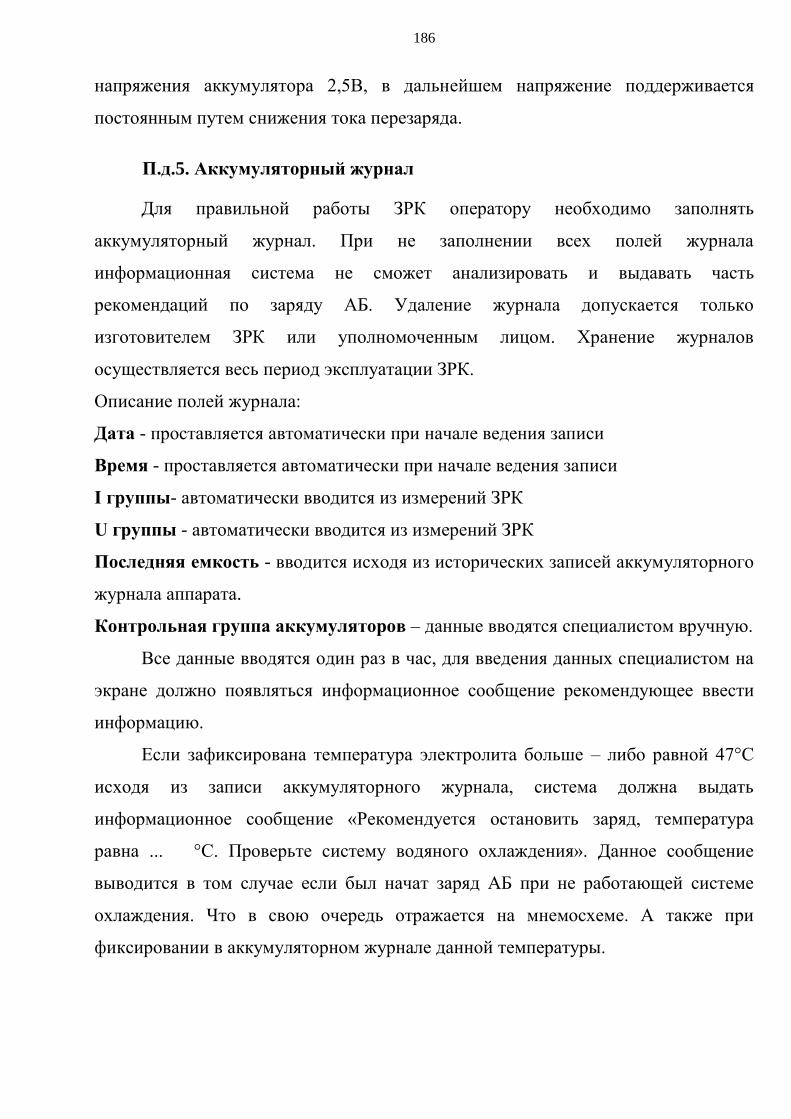
186
напряжения аккумулятора 2,5В, в дальнейшем напряжение поддерживается
постоянным путем снижения тока перезаряда.
П.д.5. Аккумуляторный журнал
Для правильной работы ЗРК оператору необходимо заполнять
аккумуляторный журнал. При не заполнении всех полей журнала
информационная система не сможет анализировать и выдавать часть
рекомендаций по заряду АБ. Удаление журнала допускается только
изготовителем ЗРК или уполномоченным лицом. Хранение журналов
осуществляется весь период эксплуатации ЗРК.
Описание полей журнала:
Дата - проставляется автоматически при начале ведения записи
Время - проставляется автоматически при начале ведения записи
I группы- автоматически вводится из измерений ЗРК
U группы - автоматически вводится из измерений ЗРК
Последняя емкость - вводится исходя из исторических записей аккумуляторного
журнала аппарата.
Контрольная группа аккумуляторов – данные вводятся специалистом вручную.
Все данные вводятся один раз в час, для введения данных специалистом на
экране должно появляться информационное сообщение рекомендующее ввести
информацию.
Если зафиксирована температура электролита больше – либо равной 47°С
исходя из записи аккумуляторного журнала, система должна выдать
информационное сообщение «Рекомендуется остановить заряд, температура
равна ... °С. Проверьте систему водяного охлаждения». Данное сообщение
выводится в том случае если был начат заряд АБ при не работающей системе
охлаждения. Что в свою очередь отражается на мнемосхеме. А также при
фиксировании в аккумуляторном журнале данной температуры.
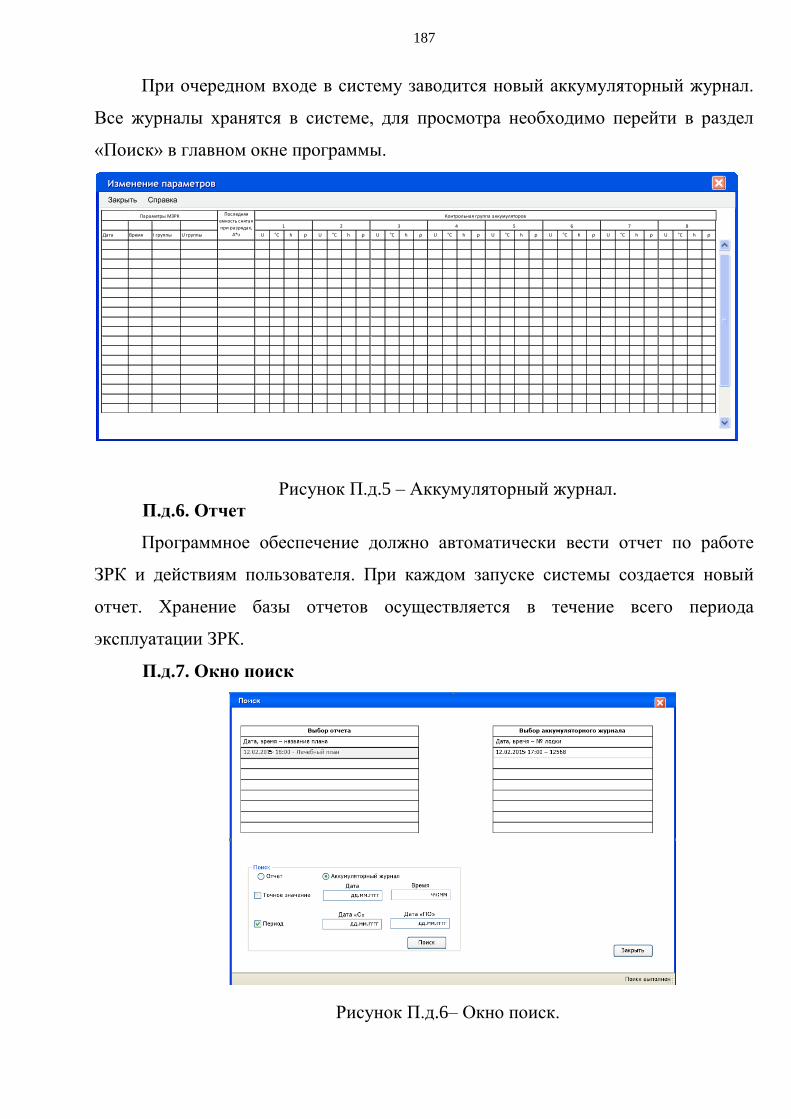
187
При очередном входе в систему заводится новый аккумуляторный журнал.
Все журналы хранятся в системе, для просмотра необходимо перейти в раздел
«Поиск» в главном окне программы.
Изменение параметровИзменение параметров
Закрыть Справка
Дата Время I группы U группы U °C h ρ U °C h ρ U °C h ρ U °C h ρ U °C h ρ U °C h ρ U °C h ρ U °C h ρ
Последняя
емкость снятая
при разрядах,
А*ч
Параметры МЗРК Контрольная группа аккумуляторов
1 2 3 4 5 6 7 8
Рисунок П.д.5 – Аккумуляторный журнал.
П.д.6. Отчет
Программное обеспечение должно автоматически вести отчет по работе
ЗРК и действиям пользователя. При каждом запуске системы создается новый
отчет. Хранение базы отчетов осуществляется в течение всего периода
эксплуатации ЗРК.
П.д.7. Окно поиск
Рисунок П.д.6– Окно поиск.
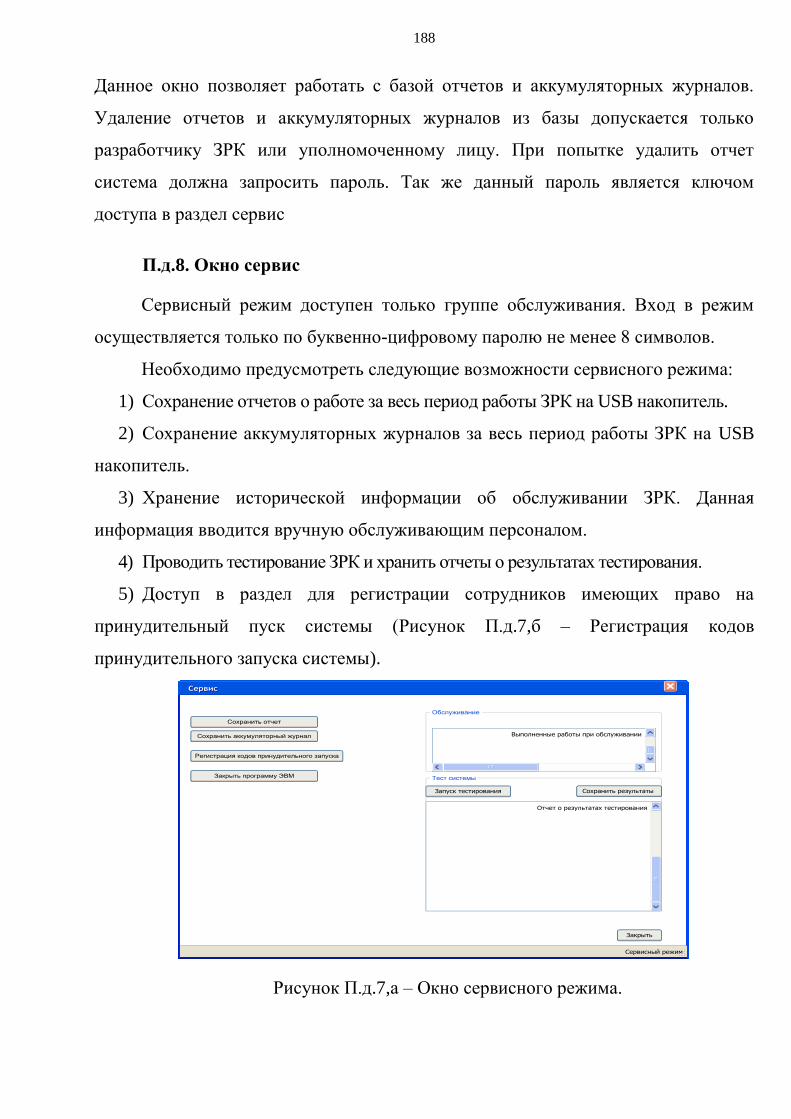
188
Данное окно позволяет работать с базой отчетов и аккумуляторных журналов.
Удаление отчетов и аккумуляторных журналов из базы допускается только
разработчику ЗРК или уполномоченному лицу. При попытке удалить отчет
система должна запросить пароль. Так же данный пароль является ключом
доступа в раздел сервис
П.д.8. Окно сервис
Сервисный режим доступен только группе обслуживания. Вход в режим
осуществляется только по буквенно-цифровому паролю не менее 8 символов.
Необходимо предусмотреть следующие возможности сервисного режима:
1) Сохранение отчетов о работе за весь период работы ЗРК на USB накопитель.
2) Сохранение аккумуляторных журналов за весь период работы ЗРК на USB
накопитель.
3) Хранение исторической информации об обслуживании ЗРК. Данная
информация вводится вручную обслуживающим персоналом.
4) Проводить тестирование ЗРК и хранить отчеты о результатах тестирования.
5) Доступ в раздел для регистрации сотрудников имеющих право на
принудительный пуск системы (Рисунок П.д.7,б – Регистрация кодов
принудительного запуска системы).
СервисСервис
Сервисный режим
Сохранить отчет
Закрыть программу ЭВМ
Обслуживание
Выполненные работы при обслуживании
Запуск тестирования
Тест системы
Отчет о результатах тестирования
Сохранить результаты
Сохранить аккумуляторный журнал
Регистрация кодов принудительного запуска
Закрыть
Рисунок П.д.7,а – Окно сервисного режима.
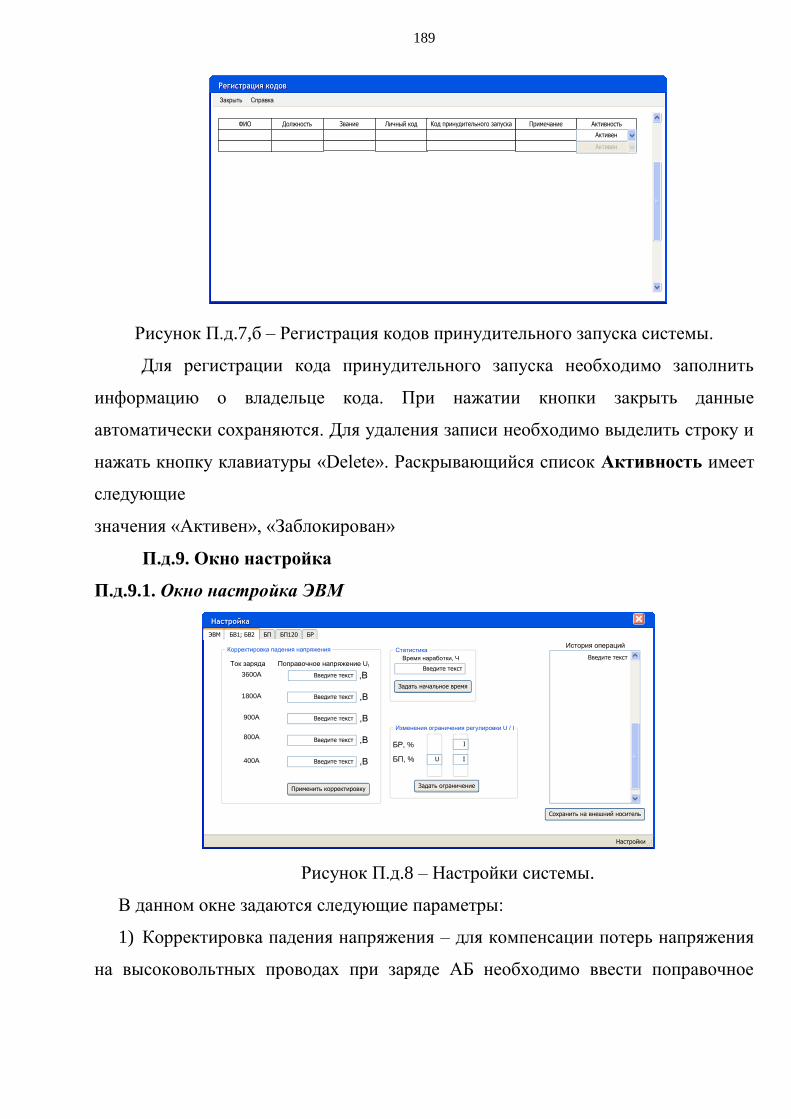
189
Регистрация кодовРегистрация кодов
Закрыть Справка
ФИО Должность Звание Личный код Код принудительного запуска Примечание Активность
Активен
Активен
Рисунок П.д.7,б – Регистрация кодов принудительного запуска системы.
Для регистрации кода принудительного запуска необходимо заполнить
информацию о владельце кода. При нажатии кнопки закрыть данные
автоматически сохраняются. Для удаления записи необходимо выделить строку и
нажать кнопку клавиатуры «Delete». Раскрывающийся список Активность имеет
следующие
значения «Активен», «Заблокирован»
П.д.9. Окно настройка
П.д.9.1. Окно настройка ЭВМ
Рисунок П.д.8 – Настройки системы.
В данном окне задаются следующие параметры:
1) Корректировка падения напряжения – для компенсации потерь напряжения
на высоковольтных проводах при заряде АБ необходимо ввести поправочное
НастройкаНастройка
Настройки
Введите текст
Введите текст
Введите текст
Введите текст
Введите текст
Корректировка падения напряжения
,В
,В
,В
,В
,В
Поправочное напряжение UIТок заряда
3600А
1800А
900А
800А
400А
Применить корректировку
Изменения ограничения регулировки U / I
U
IБР, %
БП, %
Задать ограничение
I
ЭВМ БП БП120 БРБВ1; БВ2
Статистика
Время наработки, Ч
Введите текст
Задать начальное время
Сохранить на внешний носитель
Введите текст
История операций
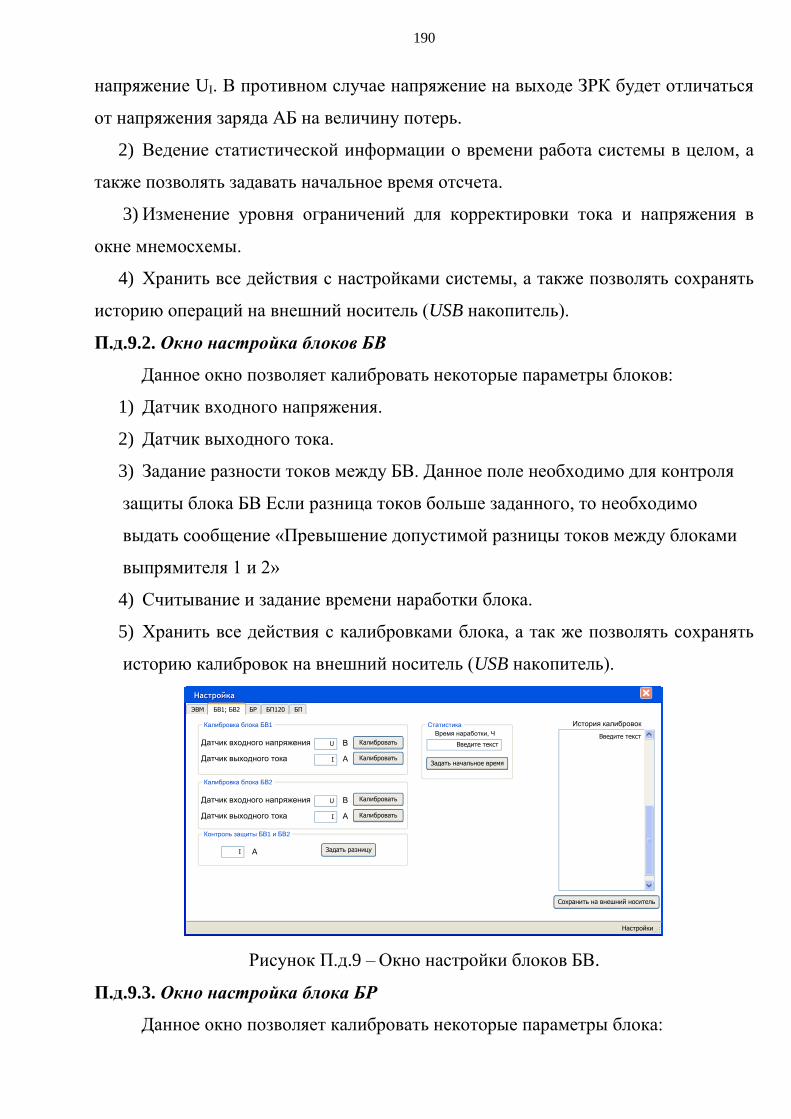
190
напряжение UI. В противном случае напряжение на выходе ЗРК будет отличаться
от напряжения заряда АБ на величину потерь.
2) Ведение статистической информации о времени работа системы в целом, а
также позволять задавать начальное время отсчета.
3) Изменение уровня ограничений для корректировки тока и напряжения в
окне мнемосхемы.
4) Хранить все действия с настройками системы, а также позволять сохранять
историю операций на внешний носитель (USB накопитель).
П.д.9.2. Окно настройка блоков БВ
Данное окно позволяет калибровать некоторые параметры блоков:
1) Датчик входного напряжения.
2) Датчик выходного тока.
3) Задание разности токов между БВ. Данное поле необходимо для контроля
защиты блока БВ Если разница токов больше заданного, то необходимо
выдать сообщение «Превышение допустимой разницы токов между блоками
выпрямителя 1 и 2»
4) Считывание и задание времени наработки блока.
5) Хранить все действия с калибровками блока, а так же позволять сохранять
историю калибровок на внешний носитель (USB накопитель).
Рисунок П.д.9 – Окно настройки блоков БВ.
П.д.9.3. Окно настройка блока БР
Данное окно позволяет калибровать некоторые параметры блока:
НастройкаНастройка
Настройки
БР БП120 БПБВ1; БВ2ЭВМ
Калибровка блока БВ1
UДатчик входного напряжения В Калибровать
IДатчик выходного тока А
Калибровка блока БВ2
UДатчик входного напряжения В Калибровать
IДатчик выходного тока А
Контроль защиты БВ1 и БВ2
I А Задать разницу
Сохранить на внешний носитель
Калибровать
Калибровать
Введите текст
История калибровокСтатистика
Время наработки, Ч
Введите текст
Задать начальное время
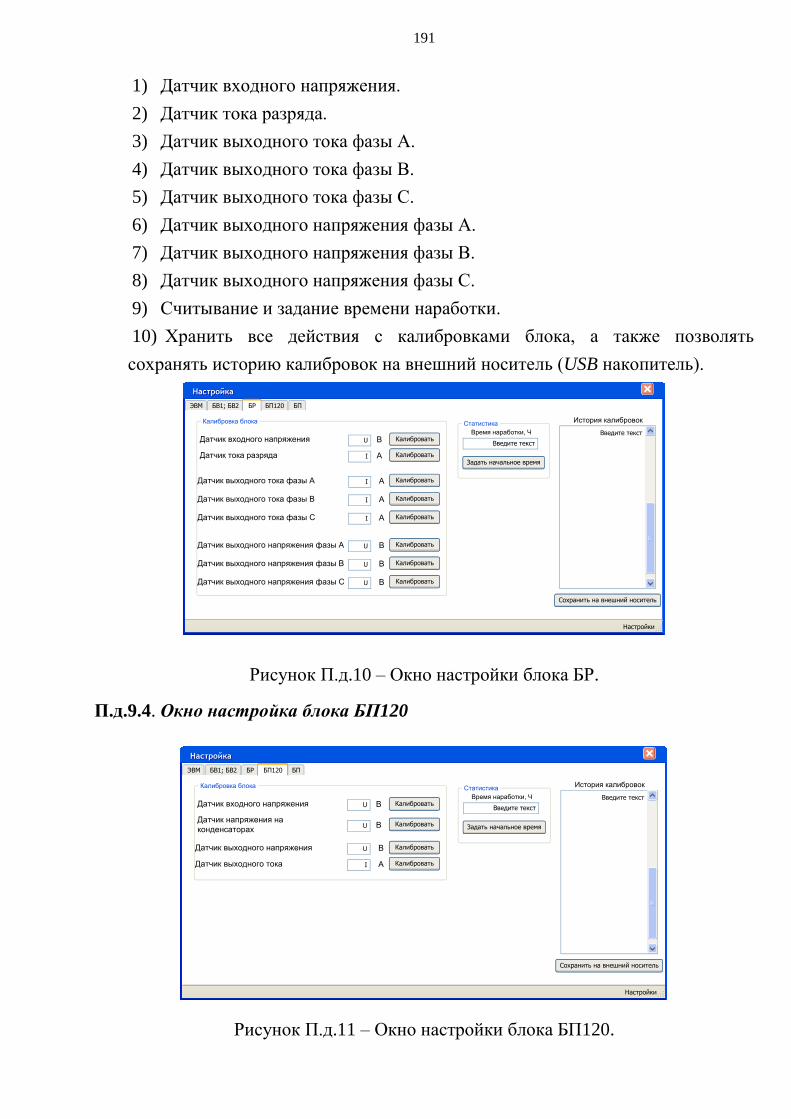
191
1) Датчик входного напряжения.
2) Датчик тока разряда.
3) Датчик выходного тока фазы А.
4) Датчик выходного тока фазы B.
5) Датчик выходного тока фазы C.
6) Датчик выходного напряжения фазы А.
7) Датчик выходного напряжения фазы B.
8) Датчик выходного напряжения фазы C.
9) Считывание и задание времени наработки.
10) Хранить все действия с калибровками блока, а также позволять
сохранять историю калибровок на внешний носитель (USB накопитель).
Рисунок П.д.10 – Окно настройки блока БР.
П.д.9.4. Окно настройка блока БП120
Рисунок П.д.11 – Окно настройки блока БП120.
НастройкаНастройка
Настройки
БП120
Статистика
Время наработки, Ч
Введите текст
БВ1; БВ2ЭВМ
Калибровка блока
UДатчик входного напряжения В Калибровать
IДатчик тока разряда А
Сохранить на внешний носитель
Калибровать
Введите текст
История калибровок
IДатчик выходного тока фазы А А Калибровать
IДатчик выходного тока фазы В А Калибровать
IДатчик выходного тока фазы С А Калибровать
UДатчик выходного напряжения фазы А В Калибровать
UДатчик выходного напряжения фазы В В Калибровать
UДатчик выходного напряжения фазы С В Калибровать
Задать начальное время
БПБР
НастройкаНастройка
Настройки
Статистика
Время наработки, Ч
Введите текст
БВ1; БВ2ЭВМ
Калибровка блока
UДатчик входного напряжения В Калибровать
UДатчик напряжения на
конденсаторахВ
Сохранить на внешний носитель
Калибровать
Введите текст
История калибровок
IДатчик выходного тока А Калибровать
UДатчик выходного напряжения В Калибровать
Задать начальное время
БПБР БП120
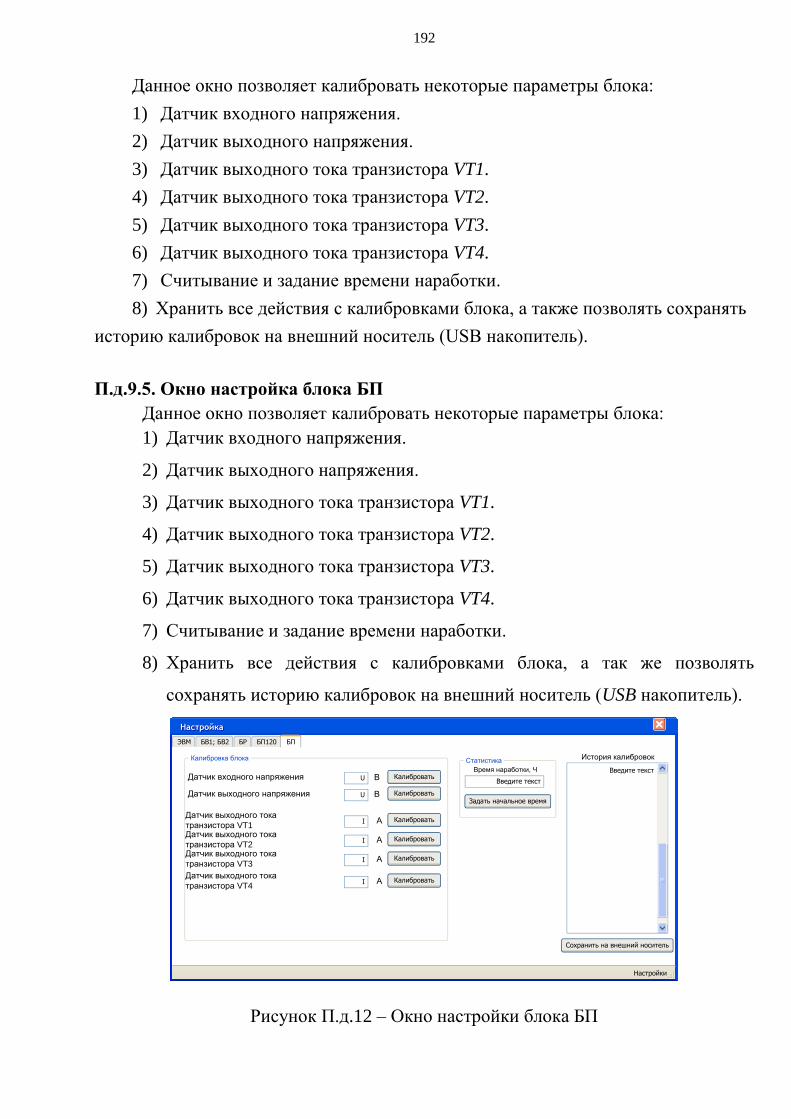
192
Данное окно позволяет калибровать некоторые параметры блока:
1) Датчик входного напряжения.
2) Датчик выходного напряжения.
3) Датчик выходного тока транзистора VT1.
4) Датчик выходного тока транзистора VT2.
5) Датчик выходного тока транзистора VT3.
6) Датчик выходного тока транзистора VT4.
7) Считывание и задание времени наработки.
8) Хранить все действия с калибровками блока, а также позволять сохранять
историю калибровок на внешний носитель (USB накопитель).
П.д.9.5. Окно настройка блока БП
Данное окно позволяет калибровать некоторые параметры блока:
1) Датчик входного напряжения.
2) Датчик выходного напряжения.
3) Датчик выходного тока транзистора VT1.
4) Датчик выходного тока транзистора VT2.
5) Датчик выходного тока транзистора VT3.
6) Датчик выходного тока транзистора VT4.
7) Считывание и задание времени наработки.
8) Хранить все действия с калибровками блока, а так же позволять
сохранять историю калибровок на внешний носитель (USB накопитель).
Рисунок П.д.12 – Окно настройки блока БП
НастройкаНастройка
Настройки
БП120
Статистика
Время наработки, Ч
Введите текст
БВ1; БВ2ЭВМ
Калибровка блока
UДатчик входного напряжения В Калибровать
UДатчик выходного напряжения В
Сохранить на внешний носитель
Калибровать
Введите текст
История калибровок
IДатчик выходного тока
транзистора VT1А Калибровать
IДатчик выходного тока
транзистора VT2А Калибровать
IДатчик выходного тока
транзистора VT3А Калибровать
IДатчик выходного тока
транзистора VT4А Калибровать
Задать начальное время
БР БП
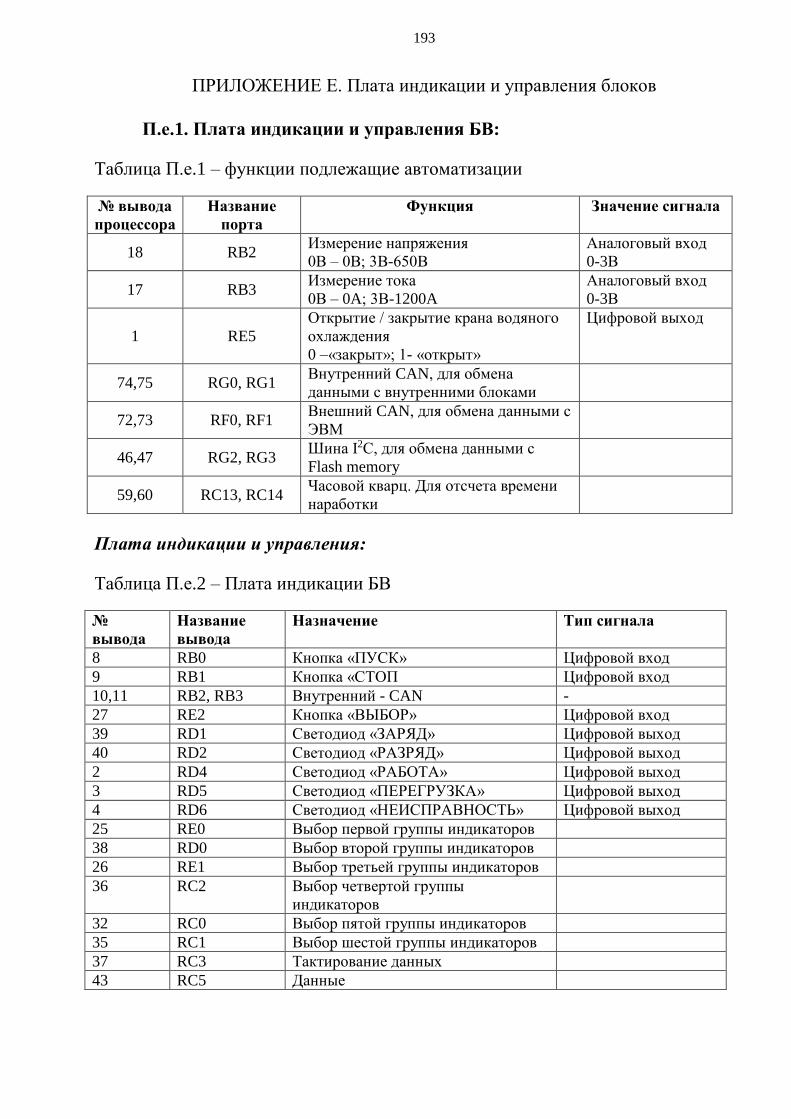
193
ПРИЛОЖЕНИЕ Е. Плата индикации и управления блоков
П.е.1. Плата индикации и управления БВ:
Таблица П.е.1 – функции подлежащие автоматизации
№ вывода
процессора
Название
порта
Функция Значение сигнала
18 RB2 Измерение напряжения
0В – 0В; 3В-650В
Аналоговый вход
0-3В
17 RB3 Измерение тока
0В – 0A; 3В-1200A
Аналоговый вход
0-3В
1 RE5
Открытие / закрытие крана водяного
охлаждения
0 –«закрыт»; 1- «открыт»
Цифровой выход
74,75 RG0, RG1 Внутренний CAN, для обмена
данными с внутренними блоками
72,73 RF0, RF1 Внешний CAN, для обмена данными с
ЭВМ
46,47 RG2, RG3 Шина I2С, для обмена данными с
Flash memory
59,60 RC13, RC14 Часовой кварц. Для отсчета времени
наработки
Плата индикации и управления:
Таблица П.е.2 – Плата индикации БВ
№
вывода
Название
вывода
Назначение Тип сигнала
8 RB0 Кнопка «ПУСК» Цифровой вход
9 RB1 Кнопка «СТОП Цифровой вход
10,11 RB2, RB3 Внутренний - CAN -
27 RE2 Кнопка «ВЫБОР» Цифровой вход
39 RD1 Светодиод «ЗАРЯД» Цифровой выход
40 RD2 Светодиод «РАЗРЯД» Цифровой выход
2 RD4 Светодиод «РАБОТА» Цифровой выход
3 RD5 Светодиод «ПЕРЕГРУЗКА» Цифровой выход
4 RD6 Светодиод «НЕИСПРАВНОСТЬ» Цифровой выход
25 RE0 Выбор первой группы индикаторов
38 RD0 Выбор второй группы индикаторов
26 RE1 Выбор третьей группы индикаторов
36 RC2 Выбор четвертой группы
индикаторов
32 RC0 Выбор пятой группы индикаторов
35 RC1 Выбор шестой группы индикаторов
37 RC3 Тактирование данных
43 RC5 Данные
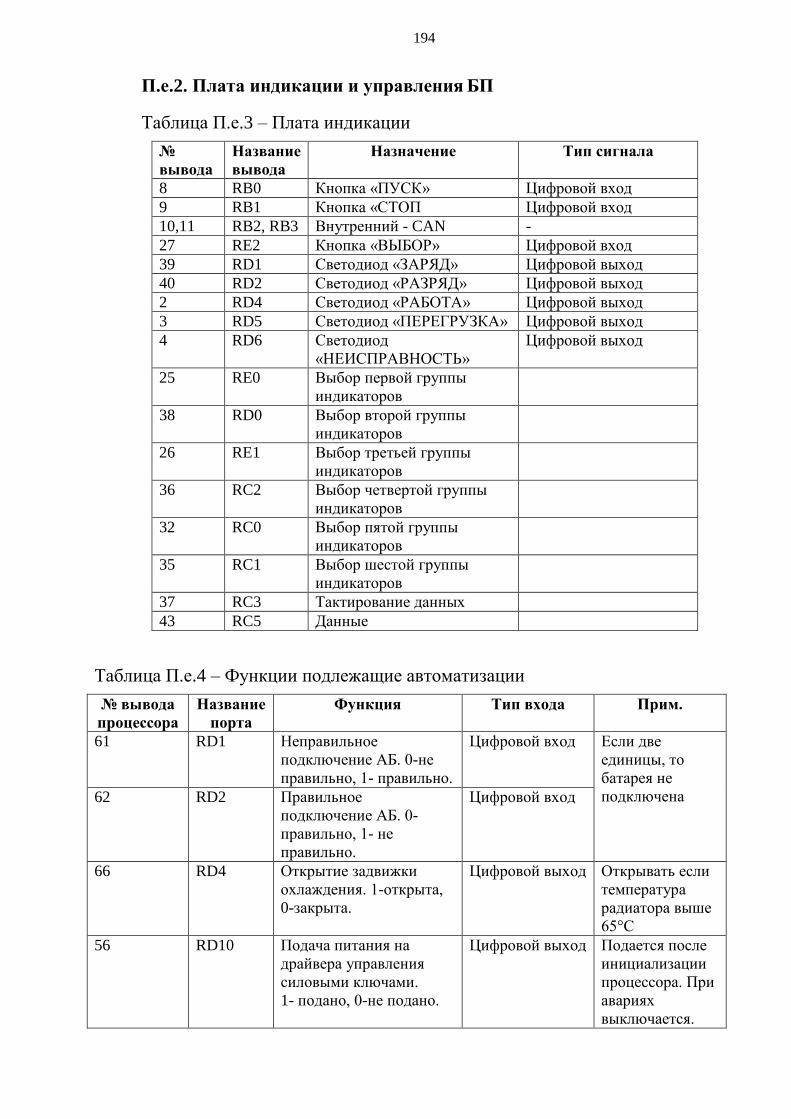
194
П.е.2. Плата индикации и управления БП
Таблица П.е.3 – Плата индикации
№
вывода
Название
вывода
Назначение Тип сигнала
8 RB0 Кнопка «ПУСК» Цифровой вход
9 RB1 Кнопка «СТОП Цифровой вход
10,11 RB2, RB3 Внутренний - CAN -
27 RE2 Кнопка «ВЫБОР» Цифровой вход
39 RD1 Светодиод «ЗАРЯД» Цифровой выход
40 RD2 Светодиод «РАЗРЯД» Цифровой выход
2 RD4 Светодиод «РАБОТА» Цифровой выход
3 RD5 Светодиод «ПЕРЕГРУЗКА» Цифровой выход
4 RD6 Светодиод
«НЕИСПРАВНОСТЬ»
Цифровой выход
25 RE0 Выбор первой группы
индикаторов
38 RD0 Выбор второй группы
индикаторов
26 RE1 Выбор третьей группы
индикаторов
36 RC2 Выбор четвертой группы
индикаторов
32 RC0 Выбор пятой группы
индикаторов
35 RC1 Выбор шестой группы
индикаторов
37 RC3 Тактирование данных
43 RC5 Данные
Таблица П.е.4 – Функции подлежащие автоматизации
№ вывода
процессора
Название
порта
Функция Тип входа Прим.
61 RD1 Неправильное
подключение АБ. 0-не
правильно, 1- правильно.
Цифровой вход Если две
единицы, то
батарея не
подключена 62 RD2 Правильное
подключение АБ. 0-
правильно, 1- не
правильно.
Цифровой вход
66 RD4 Открытие задвижки
охлаждения. 1-открыта,
0-закрыта.
Цифровой выход Открывать если
температура
радиатора выше
65°С
56 RD10 Подача питания на
драйвера управления
силовыми ключами.
1- подано, 0-не подано.
Цифровой выход Подается после
инициализации
процессора. При
авариях
выключается.

195
№ вывода
процессора
Название
порта
Функция Тип входа Прим.
37 RD14 Неисправность
транзистора VT1
Цифровой вход
38 RD15 Неисправность
транзистора VT2
Цифровой вход
72,73 RF0, RF1 Внутренний CAN
39 RF4 Неправильное
подключение батареи,
сигнал от платы
датчиков. 0-не
правильно, 1- правильно.
Цифровой вход Резервный
сигнал
18 RB2 Ток транзистора VT1 Аналоговый
вход
3В-
соответствует
1000А
21 RB6 Ток транзистора VT2 Аналоговый
вход
3В-
соответствует
1000А
22 RB7 Ток транзистора VT3 Аналоговый
вход
3В-
соответствует
1000А
27 RB8 Контроль напряжения
питания драйверов
Аналоговый
вход
5В-норма, ниже
4,5В не норма
напряжения
питания
драйверов
(уточняется при
пуско-наладке)
33 RB12 Входное напряжение
блока понизителя
Аналоговый
вход
3В-
соответствует
380В.
34 RB13 Выходное напряжение
блока понизителя
3В-
соответствует
220В, обратная
связь по которой
стабилизируется
выходное
напряжение
36 RB15 Ток транзистора VT4 Аналоговый
вход
3Всоответствует
1000А
77 RE1 ШИМ транзистора VT1 Цифровой выход
79 RE3 ШИМ транзистора VT2 Цифровой выход
1 RE5 ШИМ транзистора VT3 Цифровой выход
3 RE7 ШИМ транзистора VT4 Цифровой выход
74,75 RG0, RG1 Внешний CAN
46,47 RG2, RG3 Шина I2Cдля обмена
данными с Flash memory
13 RE8 Цифровой сигнал
превышение тока одного
из транзисторов, от
платы датчиков тока
Цифровой выход Резервный
сигнал
59,60 RC13,RC Кварцевый резонатор.
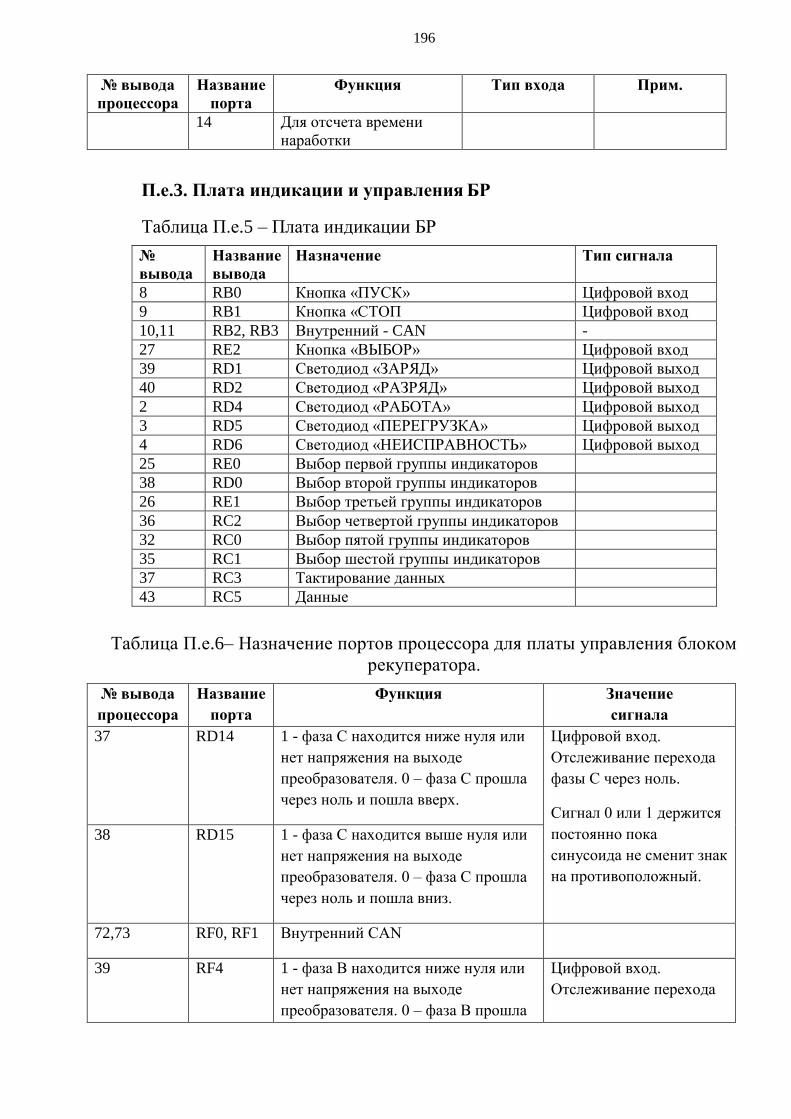
196
№ вывода
процессора
Название
порта
Функция Тип входа Прим.
14 Для отсчета времени
наработки
П.е.3. Плата индикации и управления БР
Таблица П.е.5 – Плата индикации БР
№
вывода
Название
вывода
Назначение Тип сигнала
8 RB0 Кнопка «ПУСК» Цифровой вход
9 RB1 Кнопка «СТОП Цифровой вход
10,11 RB2, RB3 Внутренний - CAN -
27 RE2 Кнопка «ВЫБОР» Цифровой вход
39 RD1 Светодиод «ЗАРЯД» Цифровой выход
40 RD2 Светодиод «РАЗРЯД» Цифровой выход
2 RD4 Светодиод «РАБОТА» Цифровой выход
3 RD5 Светодиод «ПЕРЕГРУЗКА» Цифровой выход
4 RD6 Светодиод «НЕИСПРАВНОСТЬ» Цифровой выход
25 RE0 Выбор первой группы индикаторов
38 RD0 Выбор второй группы индикаторов
26 RE1 Выбор третьей группы индикаторов
36 RC2 Выбор четвертой группы индикаторов
32 RC0 Выбор пятой группы индикаторов
35 RC1 Выбор шестой группы индикаторов
37 RC3 Тактирование данных
43 RC5 Данные
Таблица П.е.6– Назначение портов процессора для платы управления блоком
рекуператора.
№ вывода
процессора
Название
порта
Функция Значение
сигнала
37 RD14 1 - фаза С находится ниже нуля или
нет напряжения на выходе
преобразователя. 0 – фаза С прошла
через ноль и пошла вверх.
Цифровой вход.
Отслеживание перехода
фазы С через ноль.
Сигнал 0 или 1 держится
постоянно пока
синусоида не сменит знак
на противоположный.
38 RD15 1 - фаза С находится выше нуля или
нет напряжения на выходе
преобразователя. 0 – фаза С прошла
через ноль и пошла вниз.
72,73 RF0, RF1 Внутренний CAN
39 RF4 1 - фаза В находится ниже нуля или
нет напряжения на выходе
преобразователя. 0 – фаза В прошла
Цифровой вход.
Отслеживание перехода
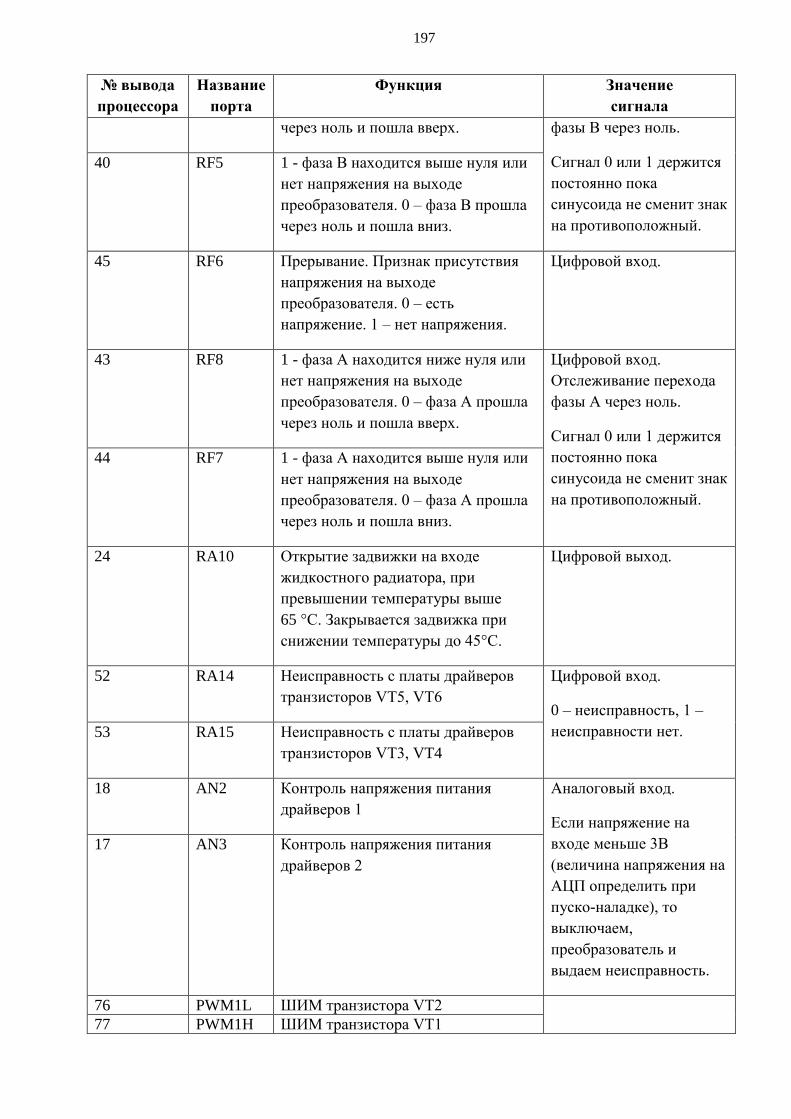
197
№ вывода
процессора
Название
порта
Функция Значение
сигнала
через ноль и пошла вверх. фазы В через ноль.
Сигнал 0 или 1 держится
постоянно пока
синусоида не сменит знак
на противоположный.
40 RF5 1 - фаза В находится выше нуля или
нет напряжения на выходе
преобразователя. 0 – фаза В прошла
через ноль и пошла вниз.
45 RF6 Прерывание. Признак присутствия
напряжения на выходе
преобразователя. 0 – есть
напряжение. 1 – нет напряжения.
Цифровой вход.
43 RF8 1 - фаза А находится ниже нуля или
нет напряжения на выходе
преобразователя. 0 – фаза А прошла
через ноль и пошла вверх.
Цифровой вход.
Отслеживание перехода
фазы А через ноль.
Сигнал 0 или 1 держится
постоянно пока
синусоида не сменит знак
на противоположный.
44 RF7 1 - фаза А находится выше нуля или
нет напряжения на выходе
преобразователя. 0 – фаза А прошла
через ноль и пошла вниз.
24 RA10 Открытие задвижки на входе
жидкостного радиатора, при
превышении температуры выше
65 °С. Закрывается задвижка при
снижении температуры до 45°С.
Цифровой выход.
52 RA14 Неисправность с платы драйверов
транзисторов VT5, VT6
Цифровой вход.
0 – неисправность, 1 –
неисправности нет. 53 RA15 Неисправность с платы драйверов
транзисторов VT3, VT4
18 AN2 Контроль напряжения питания
драйверов 1
Аналоговый вход.
Если напряжение на
входе меньше 3В
(величина напряжения на
АЦП определить при
пуско-наладке), то
выключаем,
преобразователь и
выдаем неисправность.
17 AN3 Контроль напряжения питания
драйверов 2
76 PWM1L ШИМ транзистора VT2
77 PWM1H ШИМ транзистора VT1
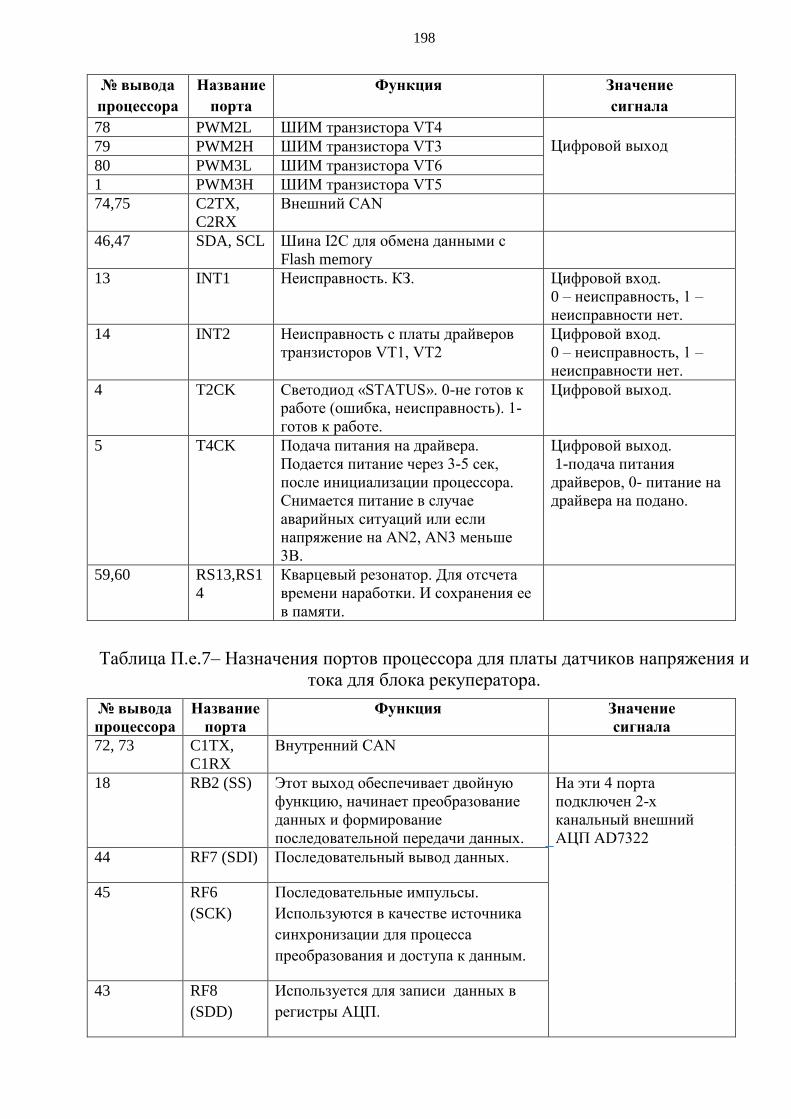
198
№ вывода
процессора
Название
порта
Функция Значение
сигнала
78 PWM2L ШИМ транзистора VT4
Цифровой выход 79 PWM2H ШИМ транзистора VT3
80 PWM3L ШИМ транзистора VT6
1 PWM3H ШИМ транзистора VT5
74,75 C2TX,
C2RX
Внешний CAN
46,47 SDA, SCL Шина I2C для обмена данными с
Flash memory
13 INT1 Неисправность. КЗ. Цифровой вход.
0 – неисправность, 1 –
неисправности нет.
14 INT2 Неисправность с платы драйверов
транзисторов VT1, VT2
Цифровой вход.
0 – неисправность, 1 –
неисправности нет.
4 T2CK Светодиод «STATUS». 0-не готов к
работе (ошибка, неисправность). 1-
готов к работе.
Цифровой выход.
5 T4CK Подача питания на драйвера.
Подается питание через 3-5 сек,
после инициализации процессора.
Снимается питание в случае
аварийных ситуаций или если
напряжение на AN2, AN3 меньше
3В.
Цифровой выход.
1-подача питания
драйверов, 0- питание на
драйвера на подано.
59,60 RS13,RS1
4
Кварцевый резонатор. Для отсчета
времени наработки. И сохранения ее
в памяти.
Таблица П.е.7– Назначения портов процессора для платы датчиков напряжения и
тока для блока рекуператора.
№ вывода
процессора
Название
порта
Функция Значение
сигнала
72, 73 C1TX,
C1RX
Внутренний CAN
18 RB2 (SS) Этот выход обеспечивает двойную
функцию, начинает преобразование
данных и формирование
последовательной передачи данных.
На эти 4 порта
подключен 2-х
канальный внешний
АЦП AD7322
44 RF7 (SDI) Последовательный вывод данных.
45 RF6
(SCK)
Последовательные импульсы.
Используются в качестве источника
синхронизации для процесса
преобразования и доступа к данным.
43 RF8
(SDD)
Используется для записи данных в
регистры АЦП.
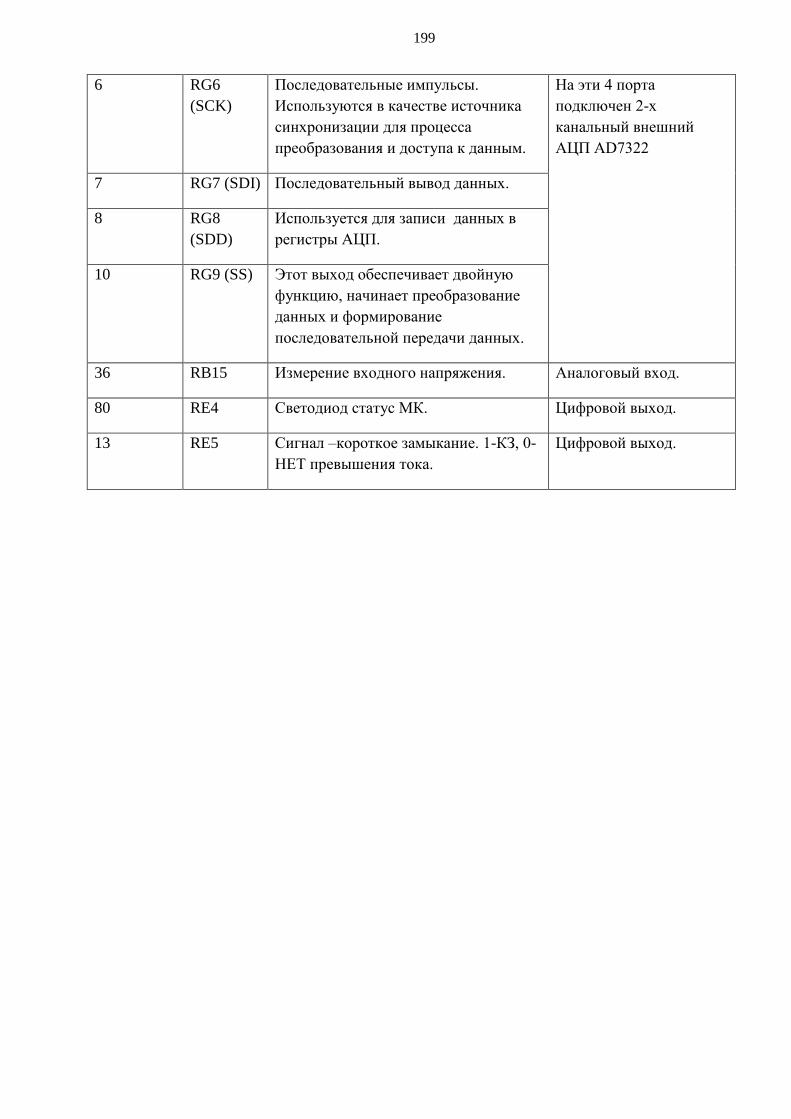
199
6 RG6
(SCK)
Последовательные импульсы.
Используются в качестве источника
синхронизации для процесса
преобразования и доступа к данным.
На эти 4 порта
подключен 2-х
канальный внешний
АЦП AD7322
7 RG7 (SDI) Последовательный вывод данных.
8 RG8
(SDD)
Используется для записи данных в
регистры АЦП.
10 RG9 (SS) Этот выход обеспечивает двойную
функцию, начинает преобразование
данных и формирование
последовательной передачи данных.
36 RB15 Измерение входного напряжения. Аналоговый вход.
80 RE4 Светодиод статус МК. Цифровой выход.
13 RE5 Сигнал –короткое замыкание. 1-КЗ, 0-
НЕТ превышения тока.
Цифровой выход.