Embed Size (px)
Citation preview

Dinamika e Manipulatorit
Punoi: Endri Poçi
Ceshtjet• Hyrje• Dinamika e Manipulatorit
– Dinamika e drejteperdrejte– Dinamika inverse
• Qendra e mases• Inercia• Energjia Kinetike• Energjia Potenciale• Shpejtesia e nje bashkuesi
• Shembuj
Hyrje
• Dinamika studjone lidhjen midis forces/momentit me levizjen e manipulatorit, zhvendosjen lineare/kendore
• Dinamika ka te beje me levizjen e trupave duke perfshire :– Kinematika :> studjon levizjen pa perfshire
forcat qe e shkaktojne ate.– Kinetika :> lidh keto forca me levizjen
Studimi i drejtimit
• Dinamika e drejteperdrejte– Nese jepen vektoret e ciftit bashkues > gjen
rezultatin e levizjes se manipulatorit– Llogaritja e nxitimit jep nje numer forcash
• Dinamika inverse– Nese jepen vektoret e pozicionit te
manipulatorit, shpetesia dhe nxitimi > gjen vektoret e kerkuar te ciftit bashkuese
– Llogaritja e forcave jep nje numer nxitimesh
Dinamika e Manipulatorit
• Ekuacionet matematikore qe pershkruajne sjelljen dinamike te manipulatorit per:– stimulimin e kompjutrit– skicimin e nje kontrolluesi te pershtatshem– zhvillimin e struktures se robotit
– Ciftet bashkuese Levizja e robotit, si p.sh nxitimi, shpejtesia, pozicjoni
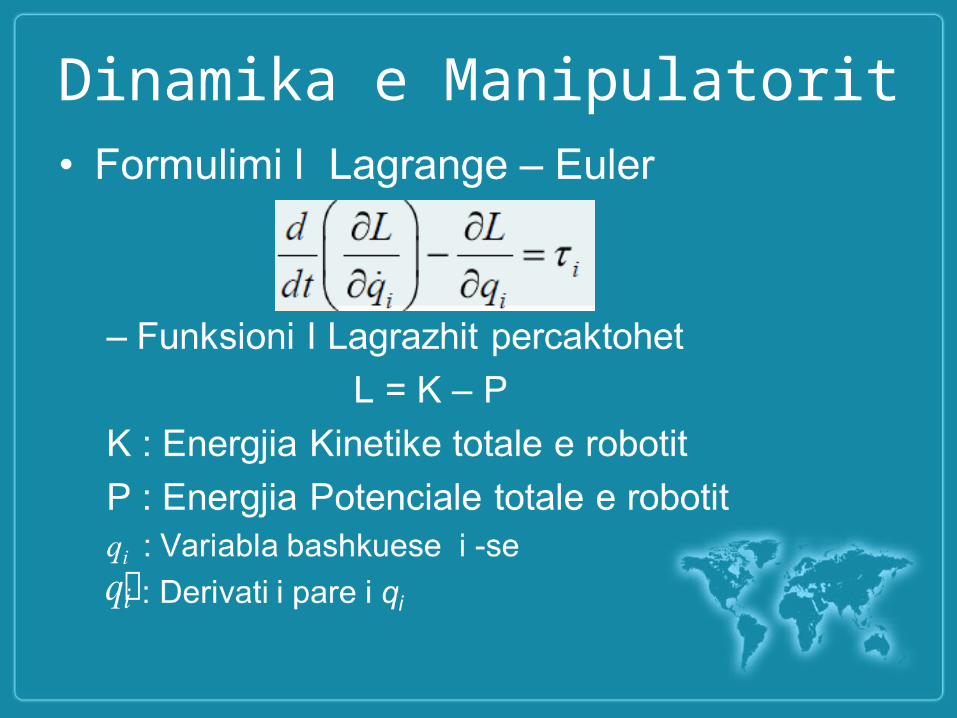
Dinamika e Manipulatorit
𝑞ሶ𝑖
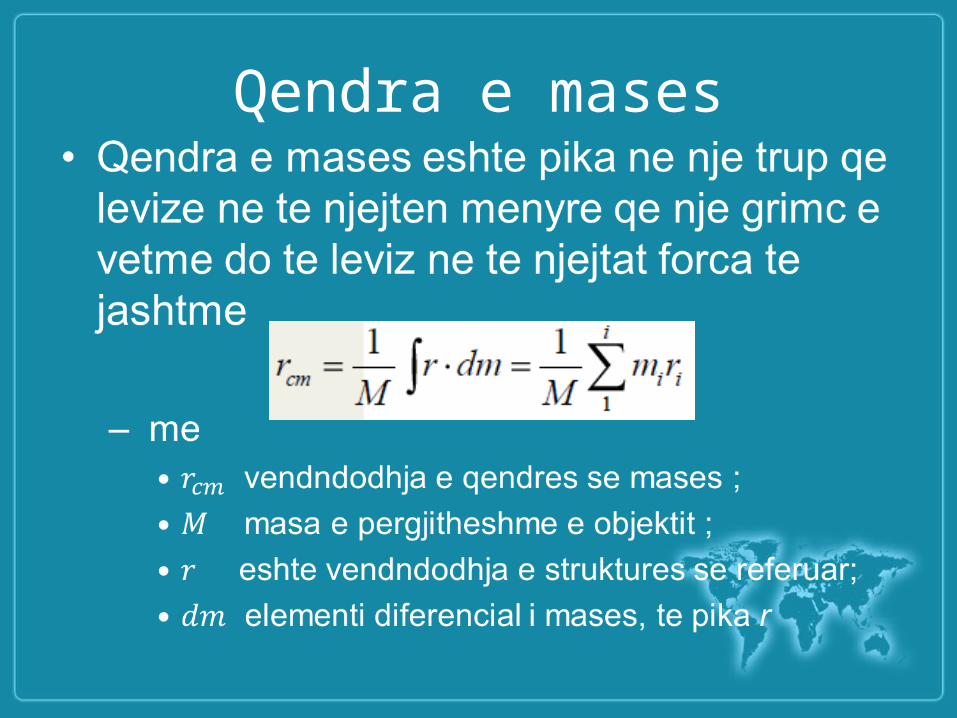
Qendra e mases
Inercia• Tendenca e trupit per te qendruar ne nje gjendje
te njetrajtshe ose ne nje levizje konstante
– Sistem inercial = struktura ne te cilen kjo gjendje eshte uniforme ( p.sh nje strukture ne pauz ose ne levizje me nje shpejtesi konstante )
– Sistemi jo-inercial = nje objekt qe eshte ne pershpejtim ne lidhje me nje objekt tjeter
Momenti i inercis
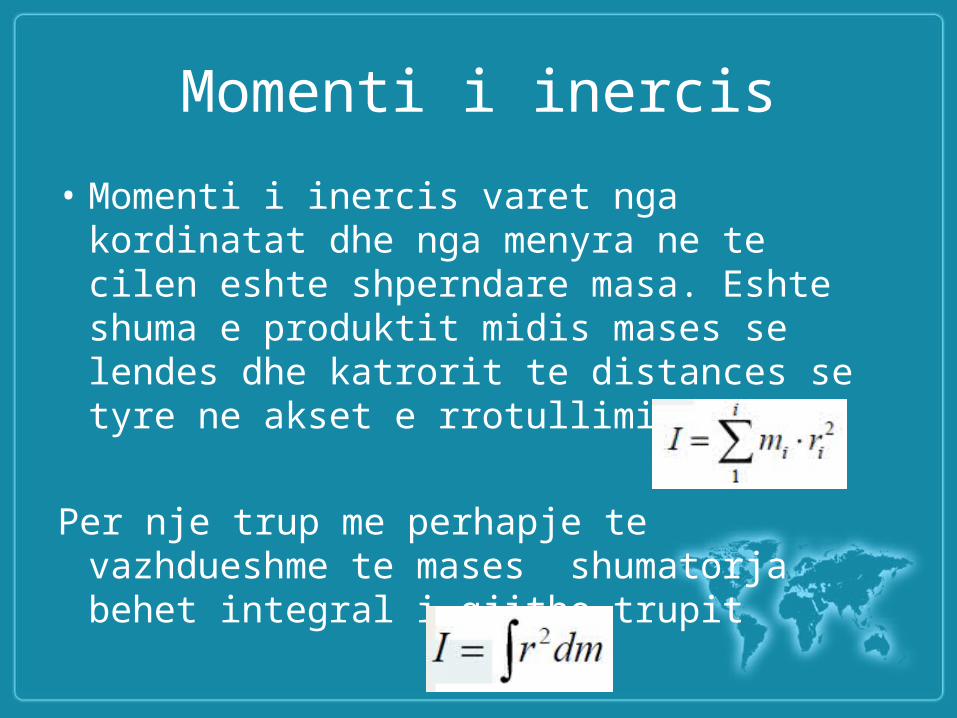
• Momenti i inercis varet nga kordinatat dhe nga menyra ne te cilen eshte shperndare masa. Eshte shuma e produktit midis mases se lendes dhe katrorit te distances se tyre ne akset e rrotullimit
Per nje trup me perhapje te vazhdueshme te mases shumatorja behet integral i gjithe trupit
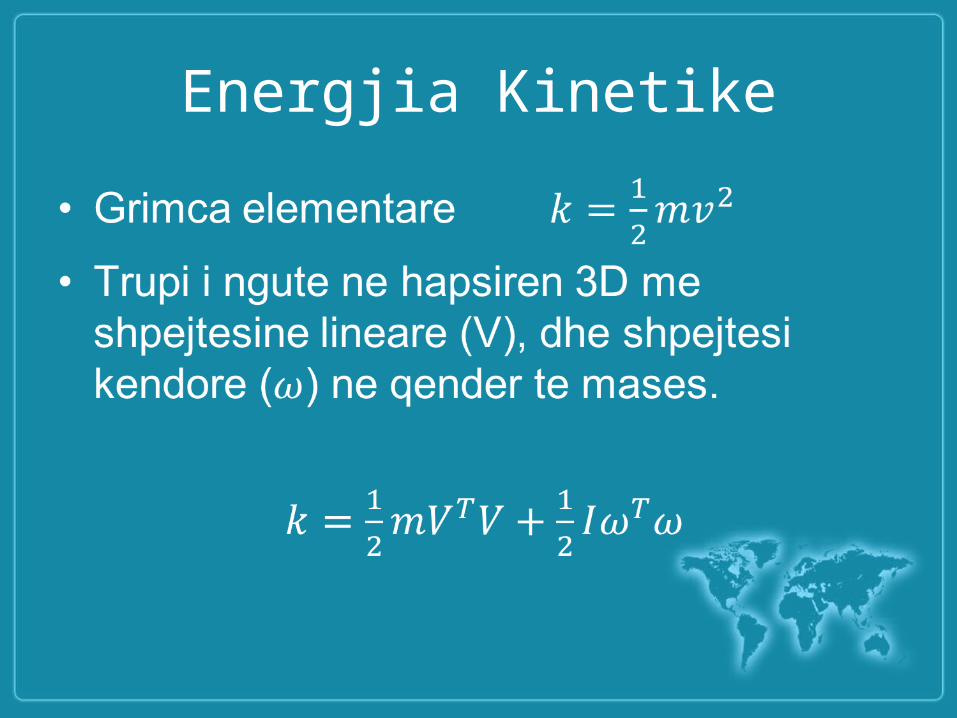
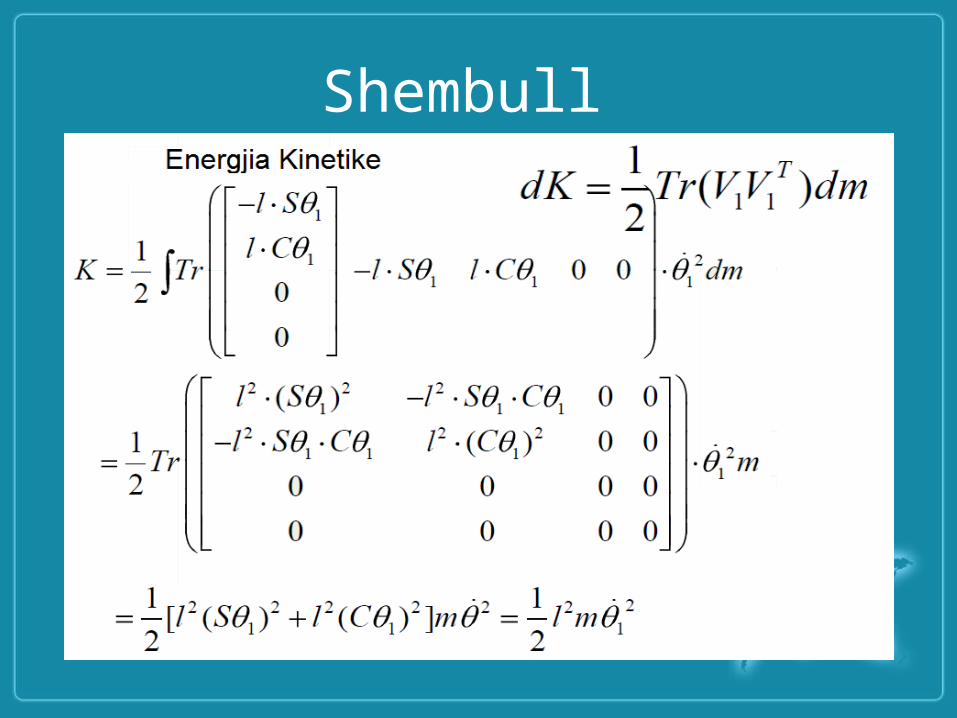
Energjia Kinetike
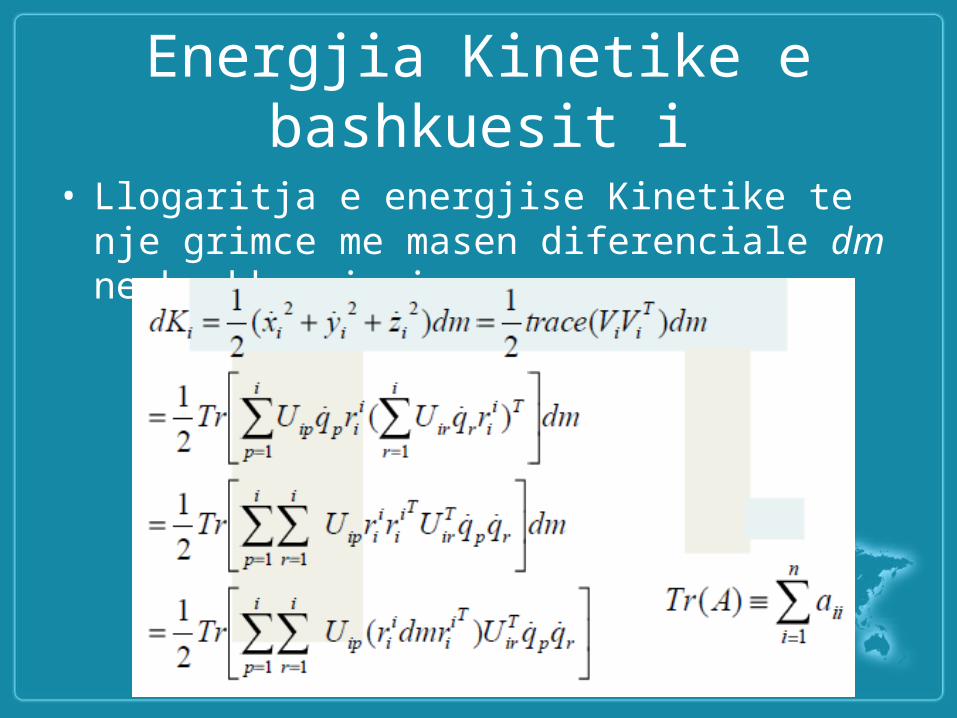
Energjia Kinetike e bashkuesit i
• Llogaritja e energjise Kinetike te nje grimce me masen diferenciale dm ne bashkuesin i
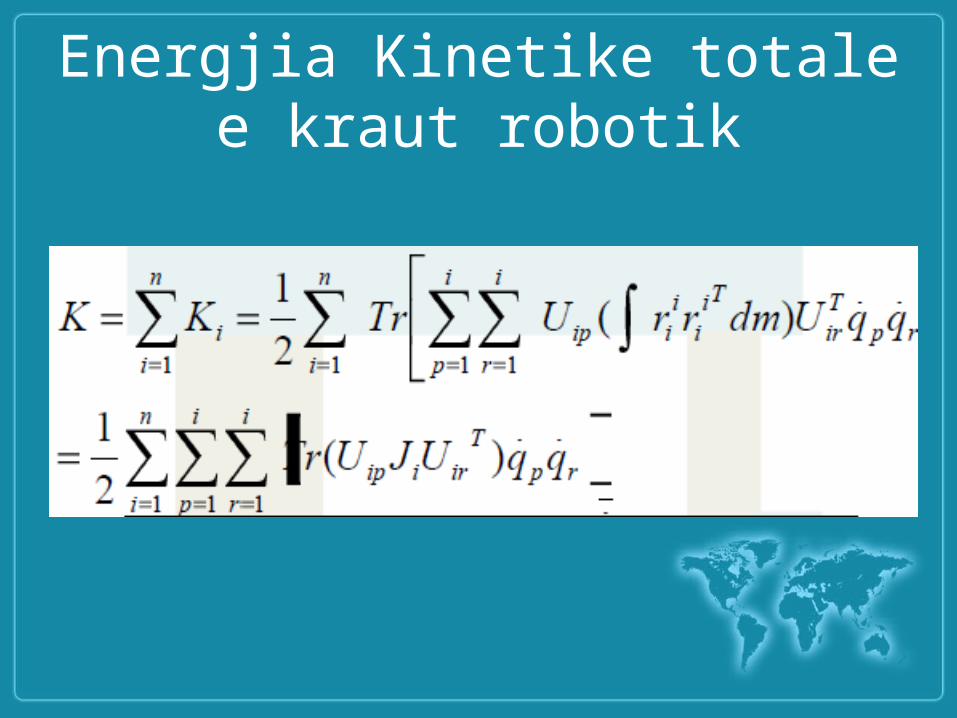
Energjia Kinetike totale e kraut robotik
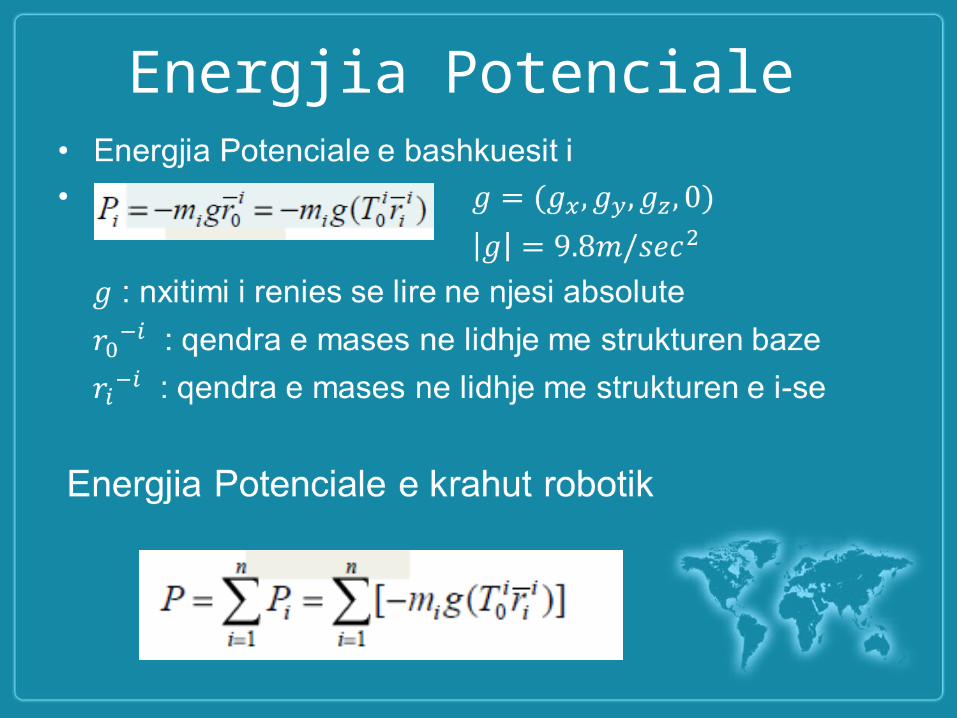
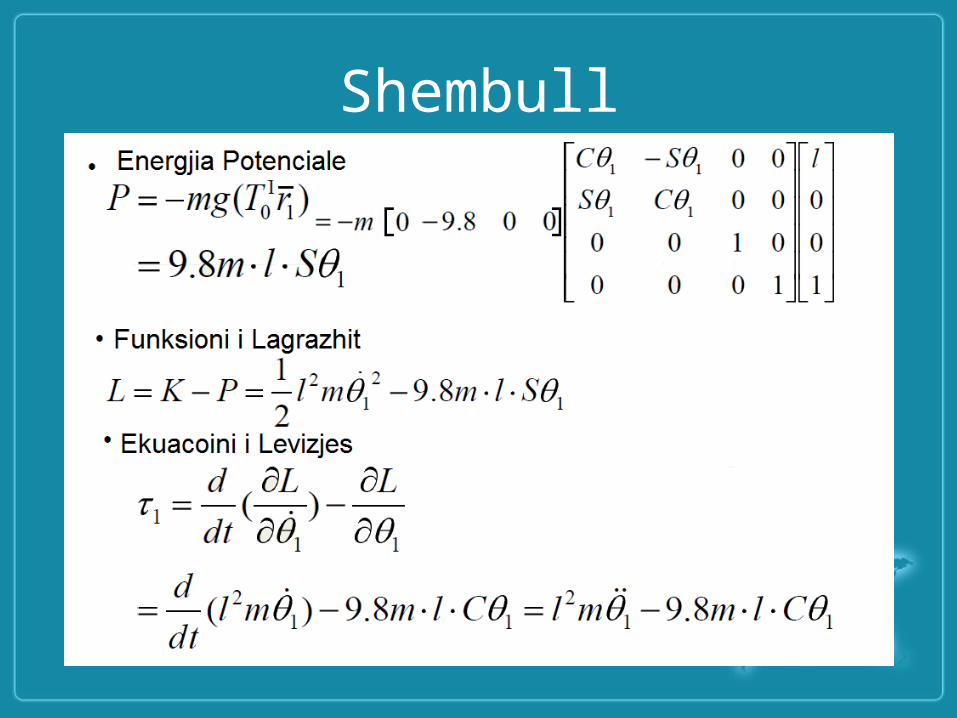
Energjia Potenciale
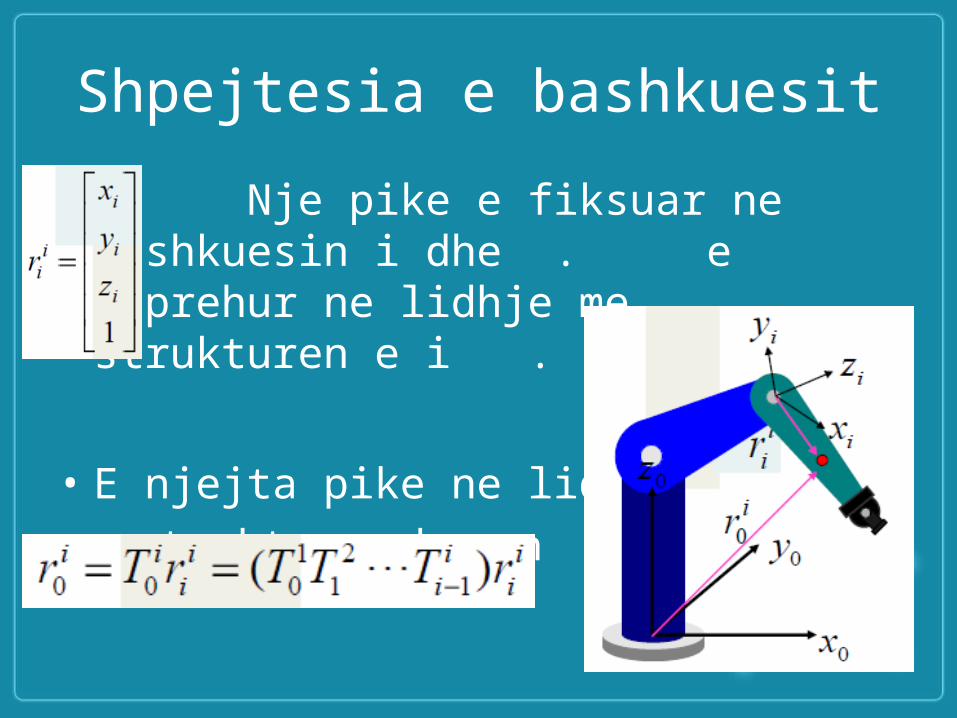
Shpejtesia e bashkuesit
• Nje pike e fiksuar ne bashkuesin i dhe . e shprehur ne lidhje me strukturen e i . se
• E njejta pike ne lidhje me
strukturen bazen
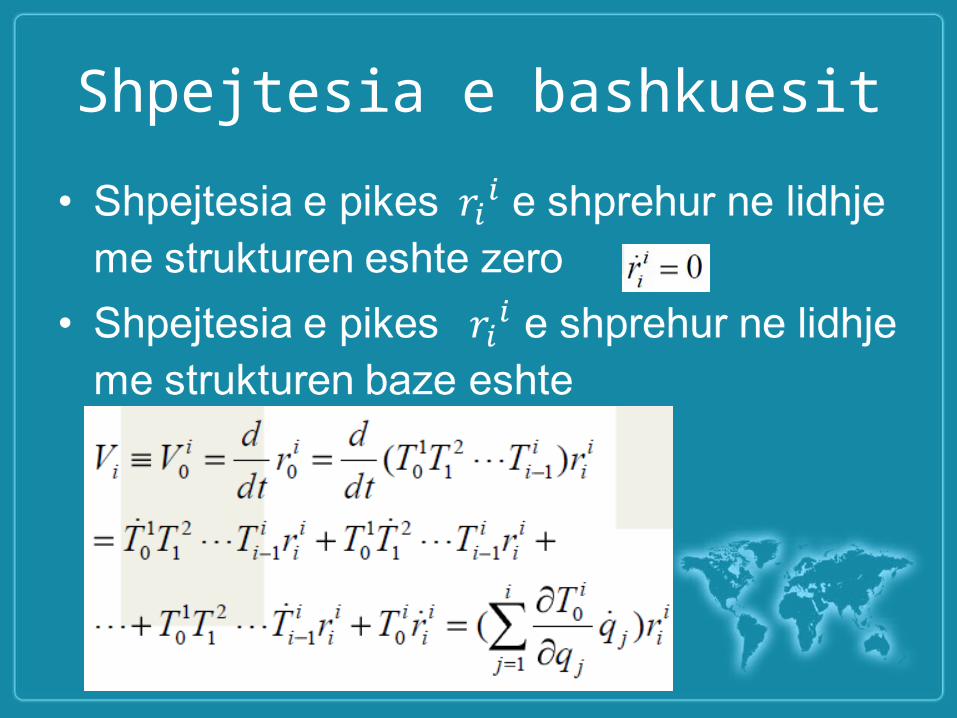
Shpejtesia e bashkuesit
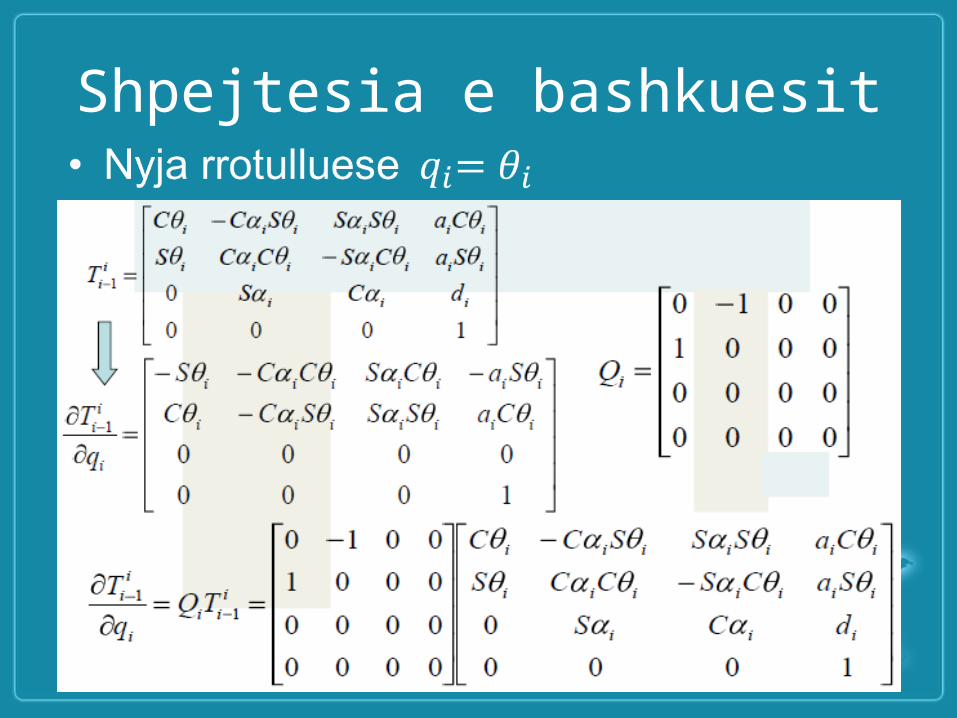
Shpejtesia e bashkuesit

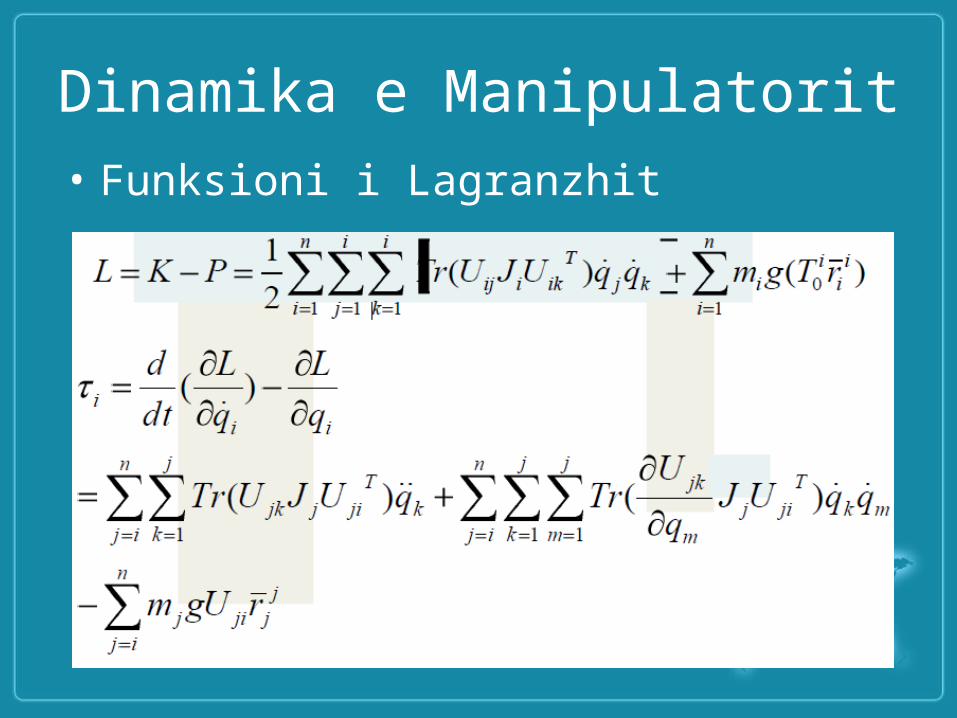
Dinamika e Manipulatorit• Funksioni i Lagranzhit
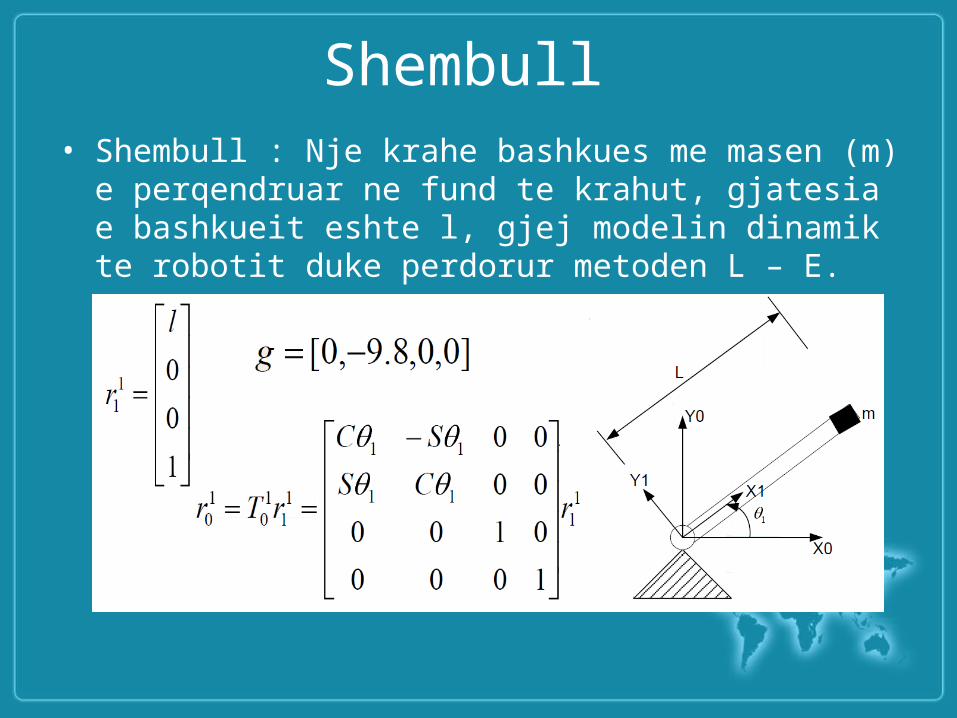
Shembull • Shembull : Nje krahe bashkues me masen (m) e
perqendruar ne fund te krahut, gjatesia e bashkueit eshte l, gjej modelin dinamik te robotit duke perdorur metoden L – E.
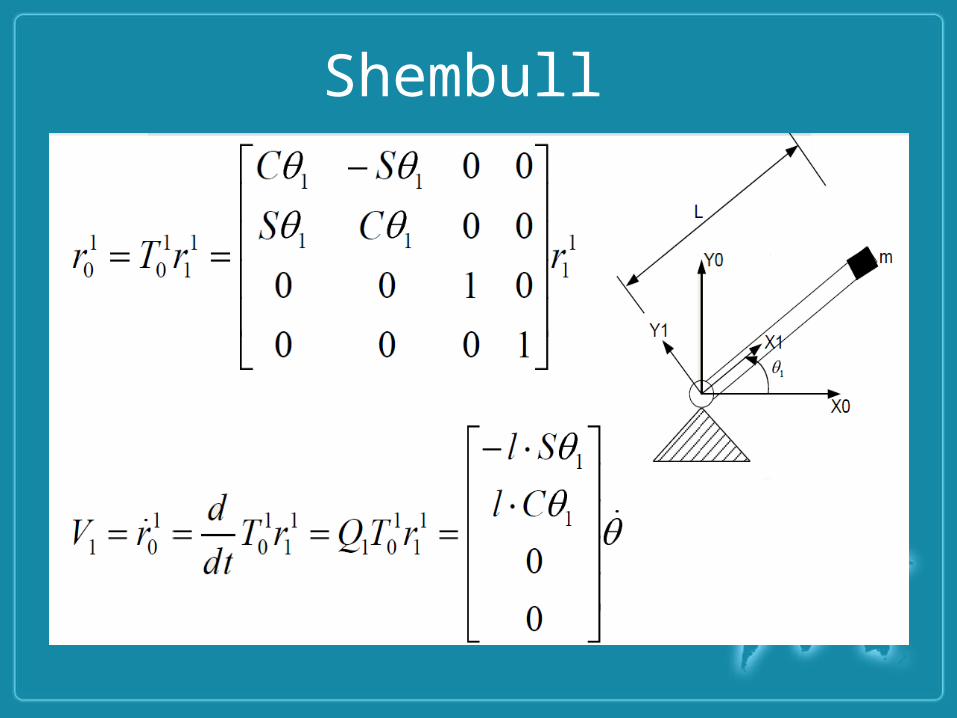
Shembull
Shembull
Shembull

FALEMINDERIT