Embed Size (px)
Citation preview

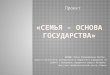
ОСНОВЫ СТЕРЕОНАБЛЮДЕНИЙ

Стереоскопическая пара (стереопара)
• Два снимка с изображениями одного и того же участка местности, полученные с двух точек пространства.
S1 S2

A
A
S1S2
S2
a1
a2 a2
bn
W1
W2
oo o

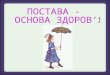
Продольный и поперечный параллаксы
y1 y2
x1 x2
a1
a2

y1 y2
x1 x2
a1
a2

y
x
a1
a2
x1
y1
y2
x2
х1 ≠х2
y1 ≠y2
p
q
p – продольный параллакс
q – поперечный параллакс
Параллаксы -смещения соответственных точек на фотоснимках стереопары
р = х1 – х2 q = y1 – y2

ZY
X
A
ZY
X
S1
S2y2
y1 x2
a1
a2P1
P2
o1
o2
R0
R1 R2
r1r2
11 rNR
.022 rR
012 RRR .012 RrNR
0)( 201 rRrN
.21
20
rrrR
N
.121
201 r
rrrR
R

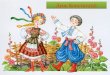
Определения превышений точек местности
• Если высота точки А местности известна, то для точки М
• Приняв получим
).( AM ZZh
.0 fpB
Z
.)(
00
00
ma
am
ppppfB
h