Embed Size (px)
Citation preview
PROYECTO FINAL
LUXOMETRO DIGITAL CON PIC16F877A
PROFESOR: AUTORES:
Prof. José Teresen Cesar Salazar 26127573
Maturín, Marzo 2017
REPÚBLICA BOLIVARIANA DE VENEZUELA
INSTITUTO UNIVERSITARIO POLITÉCNICO “SANTIAGO MARIÑO”
ESCUELA DE INGENIERÍA ELÉCTRONICA EXTENSIÓN MATURÍN
2
INDICE
INTRODUCCION.......................................................................................................................... 3
OBJETIVO GENERAL................................................................................................................. 4
OBJETIVOS ESPECÍFICOS ...................................................................................................... 4
MARCO TEORICO ...................................................................................................................... 5
LDR ............................................................................................................................................. 5
MICRO-CONTROLADOR ....................................................................................................... 5
ESTRUCTURA BÁSICA DE UN MICRO-CONTROLADOR ............................................. 6
MARCO METODOLÓGICO ....................................................................................................... 8
Materiales. ................................................................................................................................. 8
Herramientas............................................................................................................................. 8
Montaje y Método ..................................................................................................................... 8
SIMULACIONES .......................................................................................................................... 9
ANEXO......................................................................................................................................... 16
DATASHEET LCD DISPLAY 16X2 ..................................................................................... 16
RESUMEN DATASHEET PIC16877A ................................................................................ 20
DATASHEET LDR.................................................................................................................. 22
3
INTRODUCCION
Un micro-controlador se trata de un sistema computacional completo e
independiente en un mínimo chip o circuito integrado, el cual cuenta con su propia
unidad de CPU, memoria y dispositivos periféricos, permitiendo la construcción de
dispositivos inteligentes que toman decisiones de manera integra y son capaces de
llevar a cabo de funciones complejas sin la intervención de un usuario.
Los microcontroladores se usan ampliamente en la electrónica de consumo, y
recientemente se encuentran en casi toda clase de dispositivos como teléfonos
celulares, cámaras fotográficas y de video, televisores, hornos de microondas, scanner,
mouse, monitores, teclados, entre otros. Su impacto es tal, que un automóvil promedio
existe al menos una docena de ellos controlando toda clase de funciones, desde la
marcha del motor, frenos, cambios de velocidades, alarmas, etc. Y se estima que en
cada hogar existen al menos dos docenas de ellos controlando toda clase de
dispositivos y enceres.
Por lo general un CPU independiente es mucho más potente que un
microcontrolador en términos de velocidad y capacidad de memoria, ya que su
construcción normalmente esta orientada a obtener el máximo rendimiento. Un
microcontrolador en cambio suele tener menos prestaciones en términos de
rendimiento, esto, para reducir su tamaño y abaratar costos, debido a que su función
principal es integrarse en los dispositivos que gobierna y dotarlos de “cierta inteligencia”
y autonomía limitada.

4
OBJETIVO GENERAL
Diseñar un luxómetro digital haciendo uso de una fotorresistencia (LDR) y un
micro-controlador (PIC).
OBJETIVOS ESPECÍFICOS
1. Definir funcionamiento de un LDR.
2. Explicar el funcionamiento general de los microcontroladores PIC.
3. Identificar el modelo de Micro Controlador a utilizar para el diseño del luxómetro
digital.
4. Compilar mediante un IDE, las instrucciones que el microcontrolador deberá
seguir para expresar el resultado en la pantalla LCD.
5. Observar y comprobar su correcto funcionamiento en condiciones reales.
5
MARCO TEORICO
LDR
El LDR (resistor dependiente de la luz) es una resistencia que varía su valor
dependiendo de la cantidad de luz que la ilumina. Los valores de
una fotorresistencia cuando está totalmente iluminada y cuando está totalmente a
oscuras varía. Puede medir ohmios a 1000 ohmios (1K) en iluminación total y puede
ser de 50K (50,000 Ohms) a varios megaohmios cuando está a oscuras.
El LDR es fabricado con materiales de estructura cristalina, y utiliza sus
propiedades fotoconductoras. Los cristales utilizados más comunes son: sulfuro de
cadmio y seleniuro de cadmio. El valor de la fotorresistencia (en Ohmios) no varía de
forma instantánea cuando se pasa de luz a oscuridad o al contrario, y el tiempo que se
dura en este proceso no siempre es igual si se pasa de oscuro a iluminado o si se pasa
de iluminado a oscuro.
Esto hace que el LDR no se pueda utilizar en muchas aplicaciones,
especialmente aquellas que necesitan de mucha exactitud en cuanto a tiempo para
cambiar de estado (oscuridad a iluminación o iluminación a oscuridad) y a exactitud de
los valores de la fotorresistencia al estar en los mismos estados anteriores. Su tiempo
de respuesta típico es de aproximadamente 0.1 segundos.
MICRO-CONTROLADOR
Un micro-controlador es un circuito integrado que incluye en su interior las tres
unidades funcionales de una computadora: unidad central de procesamiento, memoria
y periféricos de entrada y salida. La memoria del programa en forma de flash ROM a
menudo se incluye en el chip, así como una pequeña cantidad de RAM. Estos son
diseñados para aplicaciones embebidas, en contraste con los microprocesadores
utilizados en computadoras personales u otras aplicaciones de propósito general.

6
Los micro-controladores son utilizados en los productos controlados
automáticamente y dispositivos, tales como los sistemas de control del motor del
automóvil, los dispositivos médicos implantables, controles a distancia, máquinas de
oficina, electrodomésticos, herramientas eléctricas, juguetes, etc. Al reducir el tamaño y
el costo en comparación con un diseño que utiliza un microprocesador independiente,
memoria y dispositivos de entrada/salida.
Algunos micro-controladores pueden utilizar bits de palabras de cuatro y
funcionan a la velocidad de la frecuencia de un reloj incorporado tan bajas como 4 kHz,
de bajo consumo de energía. Por lo general, tendrá la capacidad de conservar la
funcionalidad a la espera de un evento como pulsar un botón u otra interrupción. Otros
micro controladores pueden servir en roles críticos de rendimiento, donde pueden
necesitar que actué más como un procesador de señal digital (DSP), con velocidades
de reloj más alta y el consumo de energía.
Si sólo se dispusiese de un modelo de micro controlador, éste debería tener
incluido todos sus recursos para poderse adaptar a las exigencias de las diferentes
aplicaciones. En la práctica cada fabricante de micro controlador ofrece un elevado
número de modelos diferentes, desde los más sencillos hasta los más poderosos. Es
posible seleccionar la capacidad de las memorias, el número de pines, la cantidad y
potencia de los elementos auxiliares, la velocidad de funcionamiento, etc. Por todo ello,
un aspecto muy destacado del diseño es la selección del micro controlador a utilizar.
ESTRUCTURA BÁSICA DE UN MICRO-CONTROLADOR
El tamaño de la unidad central de procesamiento, la cantidad de memoria y los
periféricos incluidos dependerán de la aplicación, un ejemplo es el control de un
electrodoméstico sencillo como una batidora, utilizará un procesador muy pequeño (4 u
8 bit) por que sustituirá a un autómata finito. En cambio un reproductor de música y/o
vídeo digital (mp3 o mp4) requerirá de un procesador de 32 bit o de 64 bit y de uno o
pines de señal digital (audio y/o vídeo).

7
Los micro-controladores disponen generalmente también de una gran variedad
de dispositivos de entrada/salida, como convertidores de analógico a digital,
temporizadores, UARTs y buses de interfaz serie especializados, como I2C y otros.
Frecuentemente, estos dispositivos integrados pueden ser controlados por
instrucciones de procesadores especializados. Los modernos micro-controladores
frecuentemente incluyen un lenguaje de programación integrado, como el lenguaje de
programación BASIC que se utiliza bastante con este propósito. Los micro-
controladores negocian la velocidad y la flexibilidad para facilitar su uso. Debido a que
se utiliza bastante sitio en el chip para incluir funcionalidad, como los dispositivos de
entrada/salida o la memoria que incluye el micro-controlador, se ha de prescindir de
cualquier otra circuitería.

8
MARCO METODOLÓGICO
Materiales.
Montaje 1: Luxómetro Digital
1. 1LDR.
2. 1Resistencia de 10K ohms.
3. 1Pantalla LCD (LM016L)
4. 1Microcontrolador (PIC) 16F877A.
5. 2 Fuentes DC.
*Todo simulado en Proteus 8 Professional.
Herramientas.
Proteus 8 Professional.
Montaje y Método
Se armo una simulación de circuito, el cual se trata de un Luxómetro Digital, el
cual se trata de un dispositivo capaz de medir el nivel lumínico en una superficie dada.
La fórmula utilizada para el cálculo de la cantidad de LUX en una fotorresistencia
ideal (es decir, una fotorresistencia que siempre disminuirá mas su valor mientras mas
energía lumínica se le aplique) fue la siguiente:
𝐿𝑢𝑥 = (𝑎𝑑𝑐 ∗ 0.3287)− 210.3
Siendo “adc” el valor de amplitud de energía que es registrada a través de la
patilla A0.
Y deducida, a través de una regla de 3, tomando como base valores
preestablecidos en la cantidad de LUX suministrada por un bombillo de 30W. El cual es
aproximadamente 20400 lux. Obteniendo el multiplicador “0.3287” para transformar la
entrada en un valor cercano.
Finalmente, se realizo un calibración de 0, restando el valor sobrante en el punto
más alto de impedancia en el LDR. Obteniendo el valor de “210.3” que siendo
sustraídos, permiten la representación de un cero absoluto.
9
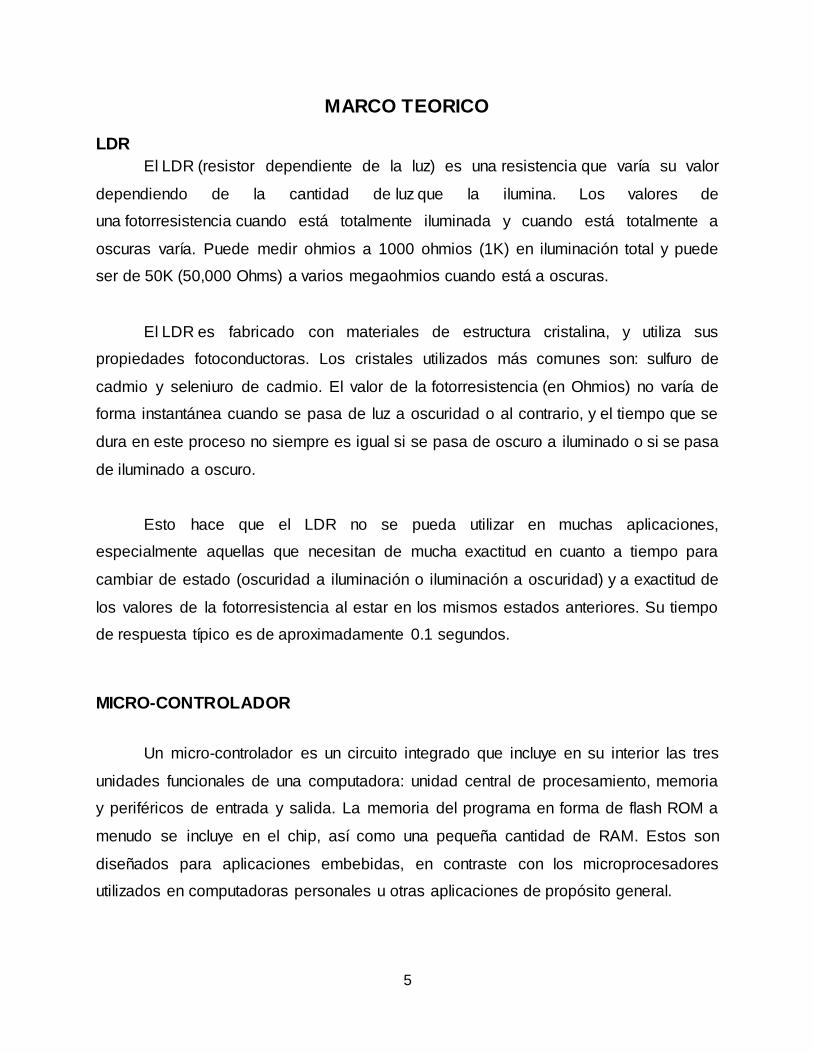
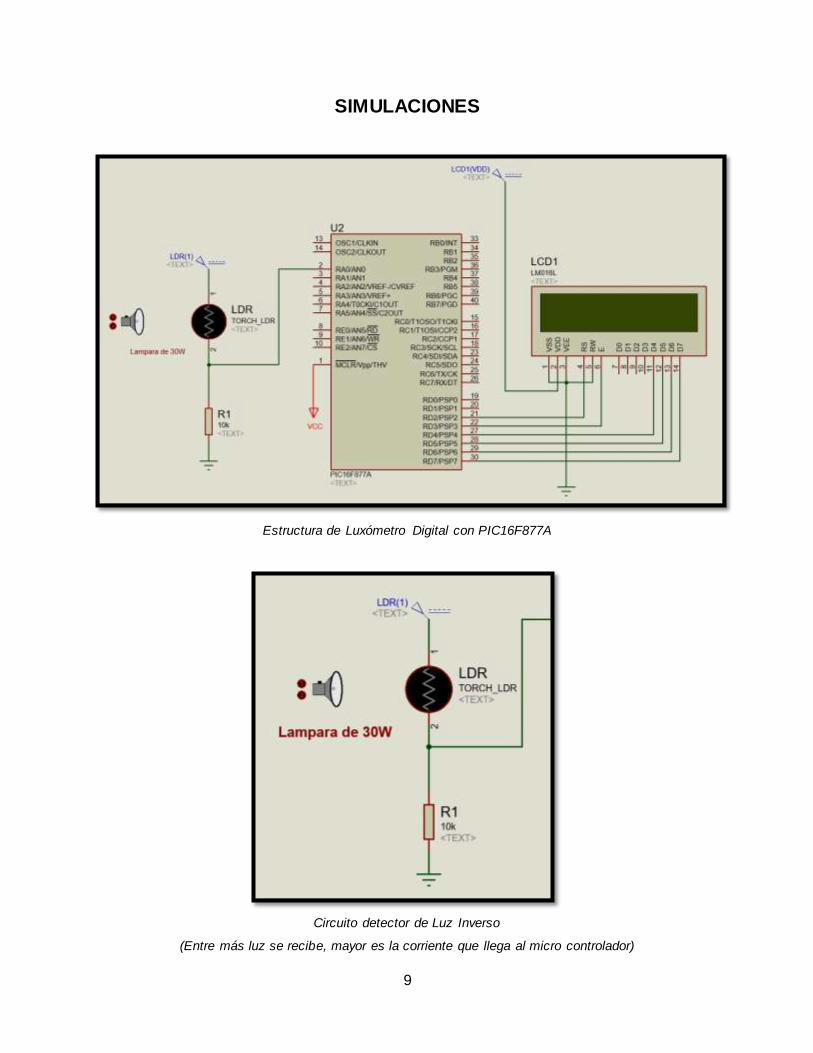
SIMULACIONES
Estructura de Luxómetro Digital con PIC16F877A
Circuito detector de Luz Inverso
(Entre más luz se recibe, mayor es la corriente que llega al micro controlador)

10
Programación del PIC 16F877A
En lenguaje de programación Basic
Sección de encabezado, se define el dispositivo a utilizar y la frecuencia en que lo hará.
(El dispositivo es el 16F877A, y la frecuencia 4MHz)

11
Declaración de los puertos de salida y definición de los puertos para el funcionamiento del LCD.
Declaración el puerto D como salida y el A como entrada analógica
Se definen las variables “adc” y “resultado”
Frases de inicio del programa
(Identificación del proyecto, materia y sección)
Fórmula utilizada para el cálculo de la cantidad de Lux recibida por el LDR.
Impresión del resultado en la LCD, bucle infinito y fin del programa.
12
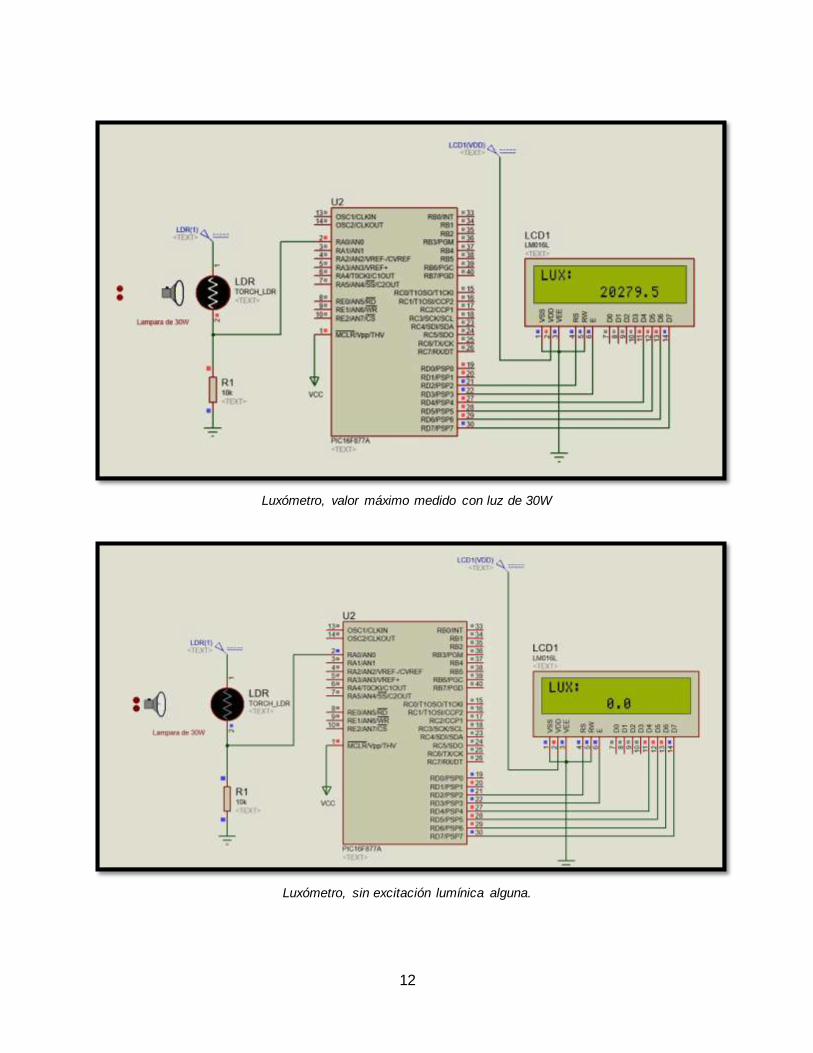
Luxómetro, valor máximo medido con luz de 30W
Luxómetro, sin excitación lumínica alguna.
13
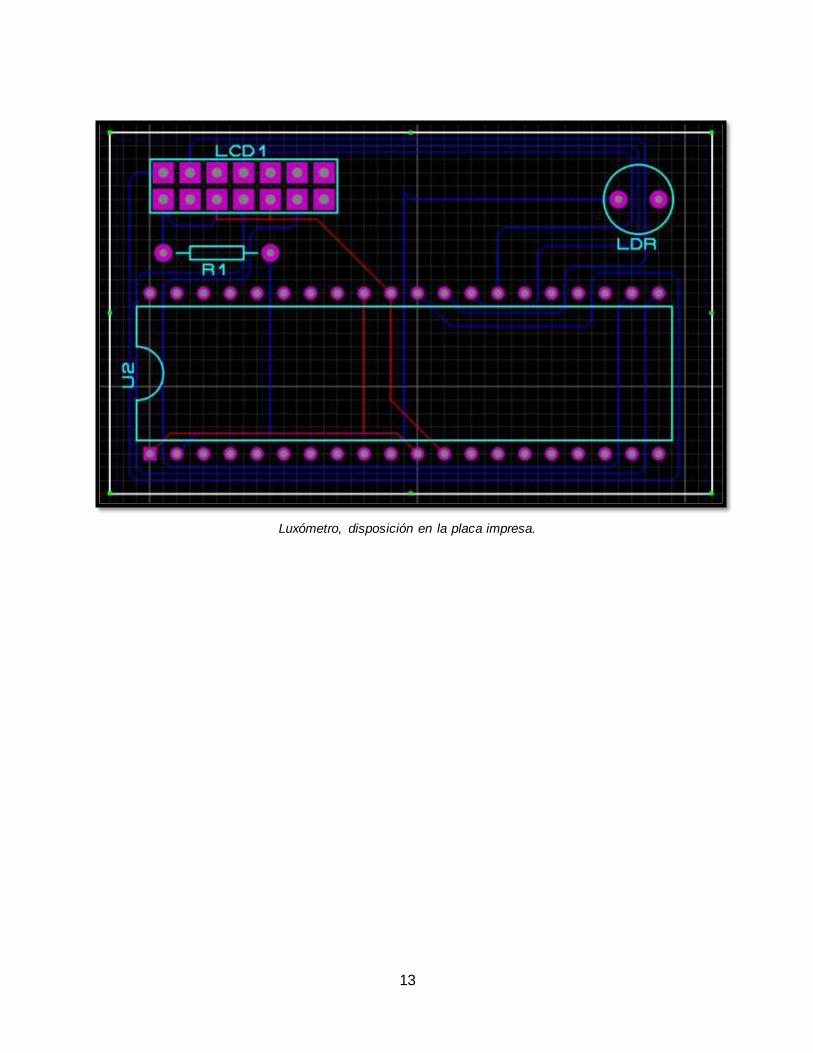
Luxómetro, disposición en la placa impresa.

14
RESULTADOS PRACTICOS.
1. Los micro controladores PIC, son capaces de realizar un número determinado
de instrucciones, que varían entre 35 y 70; dependiendo de la gama del
dispositivo.
2. Los PICS hacen uso de las estructuras en enumeración hexadecimal, para
realizar sus tareas.
3. Cada puerto (dependiendo del modelo especificado) es capaz de realizar
funciones especiales, que pueden ser modificables mediante instrucciones.
4. Los LDR pueden variar sus grados de resistencia, mediante la obtención de
energía lumínica a través de su foto receptor.
5. Los LDR pueden varían entre los distintos modelos en la resistencia, pero
siempre permitirán mayor paso de corriente al recibir luz.
6. Se pueden configurar los LDR, para dejar pasar mayor cantidad de corriente, o
dejar escapar mayor cantidad de la misma.
7. Las pantallas LCD, varían en su tamaño y dimensiones a lo largo de sus
modelos.
8. La frecuencia en que trabajan el micro controlador, afectan en la velocidad de
funcionamiento y capacidad de realizar ciertas funciones.
9. Es necesario realizar la correcta alimentación de chips micro-controladores para
que funcionen de manera adecuada.
10. Los luxes poseen diferencias con los lúmenes, ya que los primeros se miden a lo
largo de una superficie métrica, mientras que los últimos se miden en una zona
puntual.

15
BIBLIOGRAFIA.
ANONIMO. Disponible en:
http://panamahitek.com/PIC
http://www.ecured.cu/microC
http://www.ecured.cu/programacionbasic
http://www.cuscom.ecu/ldrdata
https://es.wikipedia.org/wiki/AM%C3%B4
http://www.wikipedia.com/pic16f877apins

16
ANEXO
DATASHEET LCD DISPLAY 16X2

17
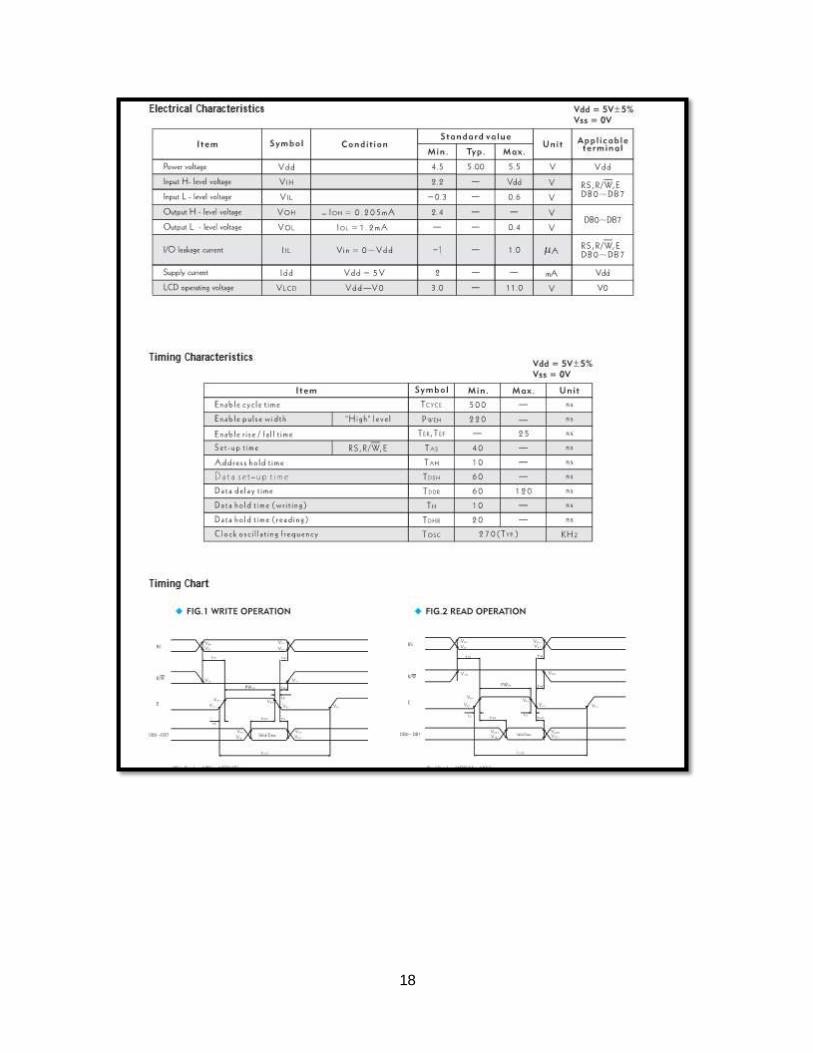
18

19
20
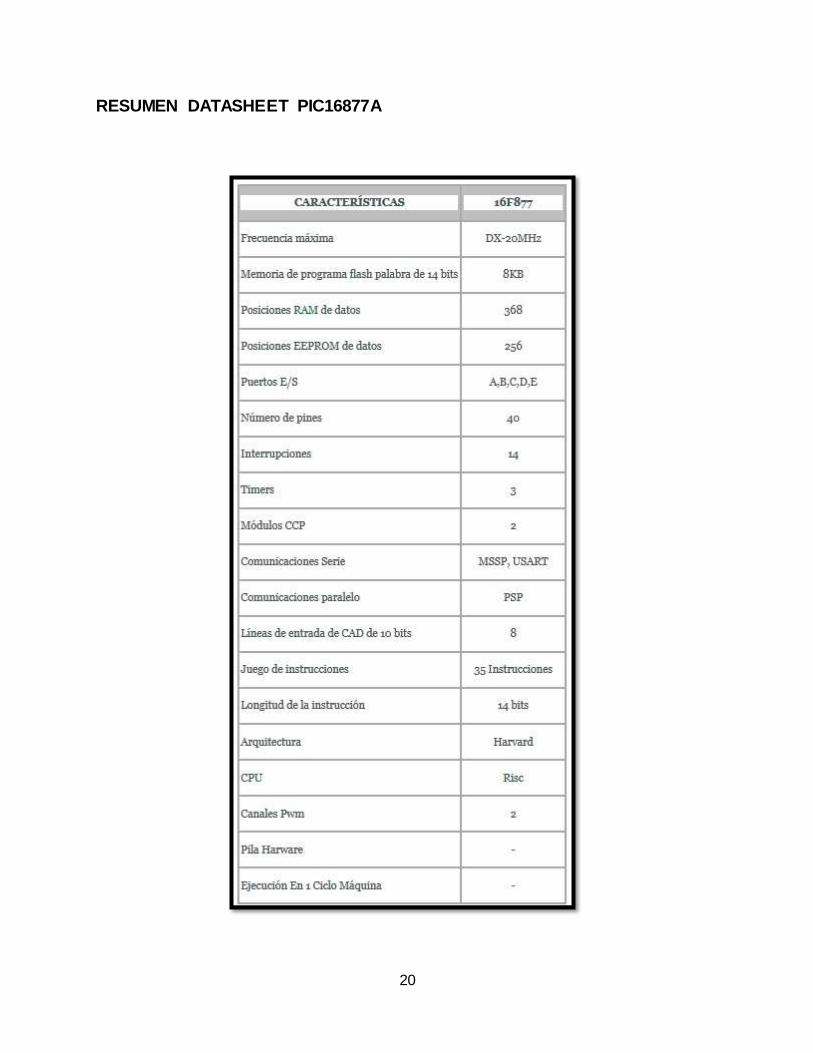
RESUMEN DATASHEET PIC16877A
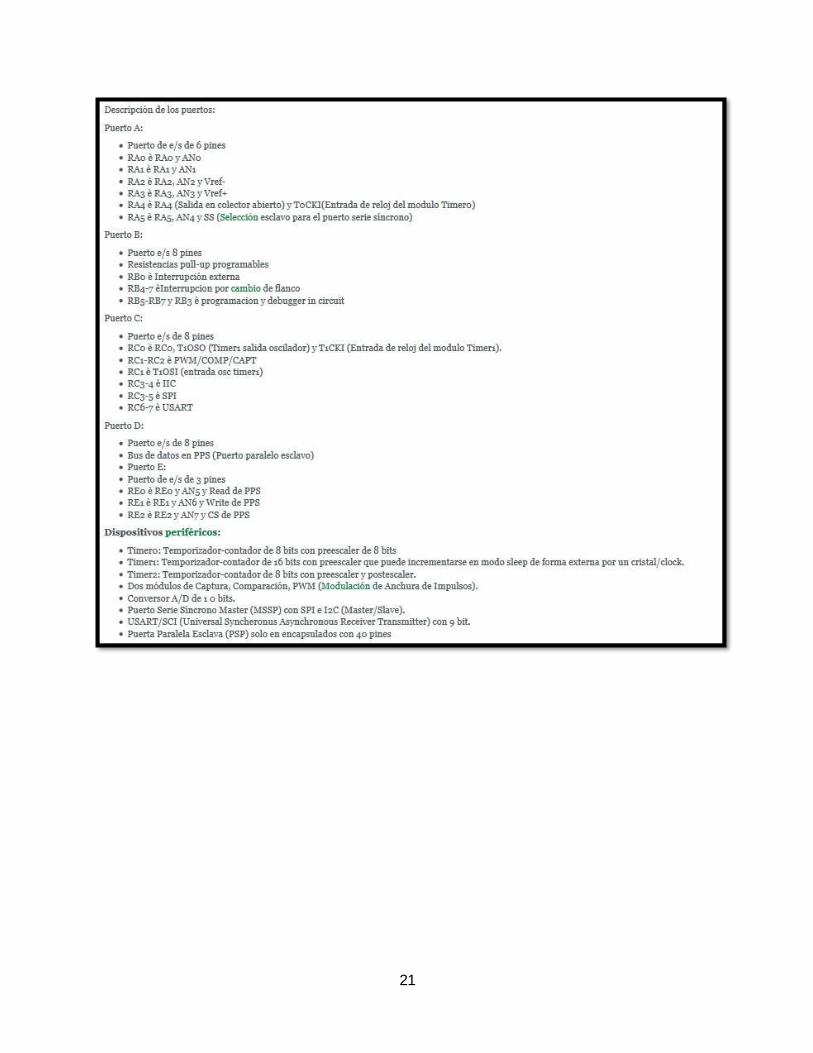
21

22
DATASHEET LDR