Embed Size (px)
DESCRIPTION
第二节 增加零极点对二阶系统响应的影响. 下面通过具体的实例来说明,一个极点对系统的考察一个三阶系统,其闭环传递函数:. S 平面. 这是一个 ω n =1 系统,其零极点在 S 平面分布如图 3-19 。实验证明,若下式成立 , 即:. 图 3-19 三阶系统的零极点分布图. 则该系统的性能指标如超调量 σ p % 和调整时间 t s 等,可用二阶系统的曲线来表示。也就是说当主导极点 的实部小于第 3 个根实部的 1/10 时,该三阶系统的响应可以用由主导极点表示的二阶系统的响应来近似。. - PowerPoint PPT Presentation
Citation preview

第二节 增加零极点对二阶系统响应的影响 下面通过具体的实例来说明,一个极点对系统的考察一个三阶系统,其闭环传递函数:
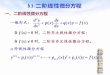
这是一个 ωn=1 系统,其零极点在 S 平面分布如图 3-19 。实验证明,若下式成立 , 即:
则该系统的性能指标如超调量 σp% 和调整时间 ts 等,可用二阶系统的曲线来表示。也就是说当主导极点 的实部小于第 3 个根实部的 1/10 时,该三阶系统的响应可以用由主导极点表示的二阶系统的响应来近似。
S 平面
图 3-19 三阶系统的零极点分布图

表 3—1 三阶系统的第 3 个极点对性能指标的影响
当 ζ=0.45 时,通过计算机仿真能够得到系统在单位阶跃输入下的响应,仿真结果归纳在表 3—1 中。

注意上述结果仅在传递函数没有零点的情况下才是正确,如果传递函数有有限个零点,且位于主导极点附近,则零点会影响系统的瞬态响应,假设系统传递函数为:
当 ζ ≤ 1 时,系统阶跃响应的超调量是的函数,针对 ζ=0.45,a/ζωn=5,2,1,0.5 的取值,图 3-21 给出了实际的阶跃响应曲线,表 3—2 给出了相应的瞬态响应性能指标,从中可以看出,由于零点的存在,使得原来二阶系统的阶跃响应的超调量增加。
图 3-21 含有一个零点二阶系统的阶跃响应

表 3—2 二阶系统附加零点对性能指标的影响
这是由于:
即:

从上式可以看出,系统的阶跃响应中包含有标准二阶系统的阶跃响应及该响应的导数,导数项的大小与零点成反比,即零点距离虚轴越远,附加零点的影响就越小。
分析上面例子可知:
假如高阶系统中距离虚轴最近的极点,其实部为其它极点的 1/10 或更小,并且附近又没有零点,则可认为系统的响应主要由该极点(或共轭复数极点)决定,这种对系统瞬态响应起主要作用的极点称为系统的主导极点,一般情况下,高阶系统具有振荡性,找到了一对共轭复数主导极点就可以近似的当作二阶系统来分析,相应的性能指标可按二阶系统近似估计。

第三节 反馈系统的稳态误差
稳态误差是对系统精度的一种衡量,它表达了系统实际输出值与希望输出值之间的最终偏差,系统对典型输入信号(包括扰动信号)作用下的稳态误差要求是最基本的要求。
本节主要内容:是研究具有 不同结构或不同传递函数的系统在不同的输入信号作用下产生的稳态误差,以及系统静特性不稳定或参数变化对系统稳态响应的影响,相应的如何降低系统的稳态误差。

一、 稳态误差的概念
如图 3-23 所示,对于单位反馈系统,稳态误差定义为:
表示稳态时系统实际输出值与希望输出值间的偏差。
如图 3-24 所示,对于非单位反馈系统,稳态误差定义为:
G(s)C(s)R(s) E(s)
-
图 3-23 单位反馈系统
G(s)C(s)R(s) E(s)
-
H(s)B(s)
图 3-24 非单位反馈系统

容易求得,误差信号 e(t) 与输入信号 r(t) 之间的传递函数为:
根据终值定理,稳定系统的稳态误差为:
由上式可知,稳态误差与输入信号和系统的参数、结构有关。图 3-25(a),(b),(c), 示出某一系统在不同典型输入信号作用下的响应曲线:
图 3-25 不同典型信号作用下的稳态误差

二、 稳态误差的计算控制系统的开环传递函数为:
系统类型常按其开环传递函数中串联积分环节的数目来分:
当 N=0 , 1 , 2 ,……时,则分别称之为 0 型, 1 型,…… N 型系统。
增加型号数,可使系统精度提高,但对稳定性不利,实际系统中N≤2 。( 1)单位阶跃输入时的稳态误差
设系统输入为单位阶跃信号, 系统的稳态误差为:

令:
Kp 定义为位置误差系数,因此:
对于 0 型系统, N=0 ,则:
对于 1 型或 1 型以上的系统, N≥1 ,则:

由上述分析可知,由于 0 型系统中没有积分环节,对阶跃输入的稳态误差为一定值,称为有差系统。
对于实际系统,通常允许存在稳态误差,为了降低稳态误差,可以增大或,若要求系统对阶跃输入的稳态误差为零,则系统必须是 1 型或 1 型以上,即在前向通道中必须具有积分环节。( 2)单位斜坡输入时的稳态误差
设系统输入为单位斜坡信号, 系统的稳态误差为:
令:

K 定义为速度误差系数,所以:
对于 0 型系统, N=0 ,则:
对于 1 型系统, N=1 ,则:
对于 2 型或高于 2 型系统, N≥2 ,则:

以上表明,稳态误差取决于系统的积分器个数, N=0稳态误差为 , N=1 稳态误差为 1/K , N≥2 则稳态误差为 0( 3)单位抛物线信号输入时的稳态误差
已知: 所以稳态误差为:
令:
Ka 定义为加速度误差系数,所以:

对于 0 型或 1 型系统, N=0 或 N =1 ,则:
对于 2 型系统, N=2 ,则:
对于 3 型或 3 型以上系统, N≥3 ,则:
控制系统常用其类型数和稳态误差系数来描述,我们将以上三种输入下的稳态误差情况总结于下表 3—3
系统 阶跃输入 r(t)=1 斜坡输入 r(t)=t 抛 物 线 输 入r(t)=t2/2
O型1型2型
1/(1+K)00
∞1/K0
∞∞1/K

例 3-1 已知两个系统如图 3-26 所示,当参考输入 r(t)=4+6t+3t2 时,试分别求出两个系统的稳态误差。
解: 系统( a )为 1 型系统,其 Ka
=0 ,不能紧跟 r(t) 中的 3t2 分量,所以:
系统 (b) 为 2 型系统,其 Ka=K=10/4 ,所以:
图 3-26 例子 3-2 的系统
C(s)R(s)
-)4(
10
ss
( a ) 1 型系统
C(s)R(s)
- )4(
)1(102
ss
s
( b ) 2 型系统

三、 主扰动输入引起的稳态误差
假设主扰动 N(s) 的作用点如图 3-27所示,分析它对输出或稳态误差的影响。
因为:
所以:
由于研究 N(s) 的影响,故可认为 R(s)=0 ,所以:
G(s)C(s)R(s)
-
H(s)B(s)
E(s)N(s)
图 3-27 主扰动的影响

式中 为输出与扰动之间的传递函数。误差信号与
扰动信号之间的关系为:
稳态时:
若 则:

由此可见,扰动作用点以前的系统前向通道 G(s) 中的放大系数愈大,则由扰动引起的稳态误差就愈小,为了降低主扰动引起的稳态误差常采用增大扰动点以前的前向通道放大系数或在扰动点以前引入积分环节。
四、关于降低稳态误差问题概括起来,降低稳态误差的措施有以下几种:
1) 增大系统开环放大系数可增强系统对参考输入的跟随能力;增大扰动作用点前向通道放大系数可降低扰动引起的稳态误差。
2) 增加前向通道中积分环节数,使系统型号提高,可以消除不同输入信号时的稳态误差。
3) 保证元件有一定的精度和稳定的性能,尤其是反馈通道元件。有关说明可参见第五节内容。
4) 如果作用于系统的主要干扰可以测量时,采用复合控制来降低系统误差,消除扰动影响,是一个很有效的办法。

图 3-28 表示了一个按输入反馈 - 按扰动顺馈的复合控制系统。如果 N(s) 是可测,并且 Gn(s) 是已知,则可通过适当的选择 GN
(s) ,达到消除扰动所引起的误差。按系统结构图可求出 C(s) 和 N(s) 的关系为:
若取:
即:
则可消除扰动对系统的影响。
C(s)R(s)
-
H(s)
G(s) +
+
)(sGN
)(sGc
)(sGn
+
+
E(s)
+ +
N(s)
图 3-28 复合控制系统

为了提高系统对参考输入的跟踪能力,也可按参考输入顺馈来消除或降低误差。
C(s)R(s)
-
H(s)
+ G(s) +
+
)(sGN
)(sGc
图 3-29 按参考输入顺馈的复合控制系统
此时确定传递函数 GN(s) 的方法,是使系统在参考输入作用下的误差为零。
按图 3-29 求出 E(s) 与 R(s) 的关系:
令:
即:
则可以消除由参考输入所引起的误差。