Embed Size (px)
Citation preview
長柱の座屈
-�-
断面寸法に対して非常に長い柱に圧縮荷重を加えると、初期段階においては一様圧縮変形を生ずるが、
ある荷重に達すると急に横方向にたわむことがある。このように長柱が軸圧縮荷重を受けていて突然横
方向にたわむ現象を座屈といい、この現象を示す荷重を座屈荷重 Pcr、このときの応力を座屈応力 scrと
いう。
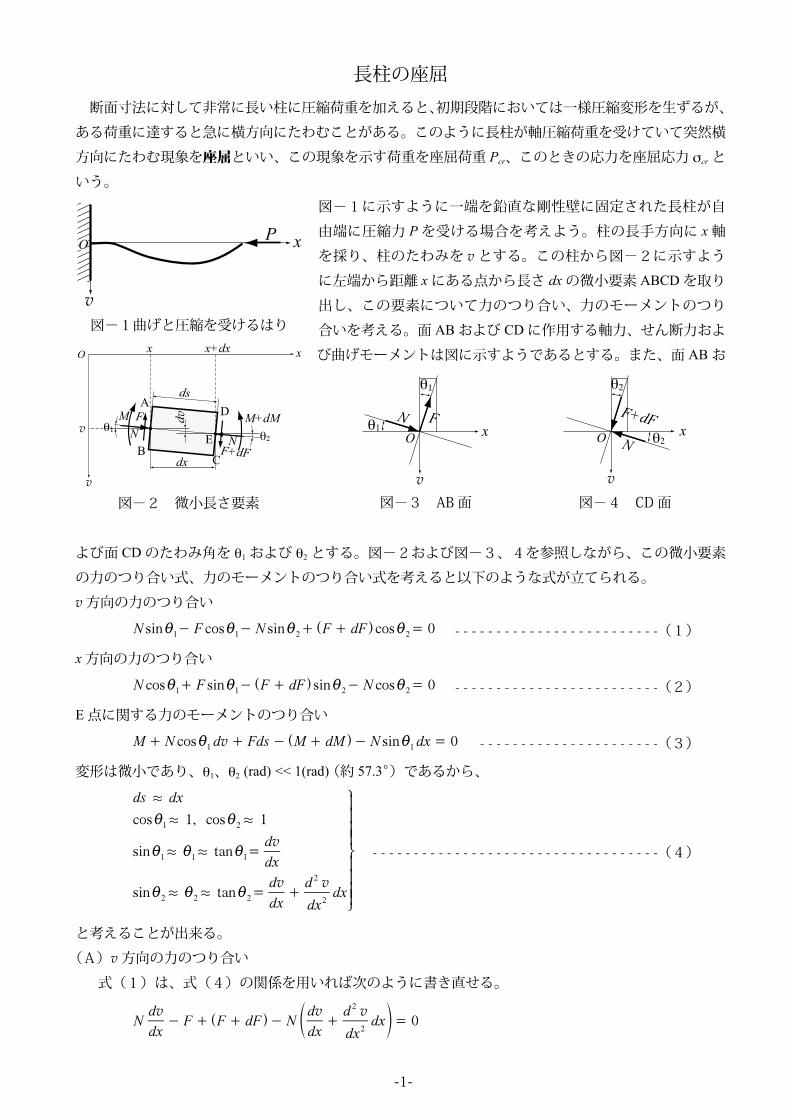
図−1に示すように一端を鉛直な剛性壁に固定された長柱が自
由端に圧縮力 Pを受ける場合を考えよう。柱の長手方向に x軸
を採り、柱のたわみを vとする。この柱から図−2に示すよう
に左端から距離 xにある点から長さ dxの微小要素 ABCDを取り
出し、この要素について力のつり合い、力のモーメントのつり
合いを考える。面 ABおよび CDに作用する軸力、せん断力およ
び曲げモーメントは図に示すようであるとする。また、面 ABお
よび面 CDのたわみ角を q1および q2とする。図−2および図−3、4を参照しながら、この微小要素
の力のつり合い式、力のモーメントのつり合い式を考えると以下のような式が立てられる。
v方向の力のつり合い
sin cos sin cosN F N F dF 01 1 2 2- - + + =i i i i] g - - - - - - - - - - - - - - - - - - - - - - - - - -(1)
x方向の力のつり合い
cos sin sin cosN F F dF N 01 1 2 2+ - + - =i i i i] g - - - - - - - - - - - - - - - - - - - - - - - - - -(2)
E点に関する力のモーメントのつり合い
vcos sinM N d Fds M dM N dx 01 1+ + - + =-i i] g - - - - - - - - - - - - - - - - - - - - - - -(3)
変形は微小であり、q1、q2-(rad)-<< 1(rad)-(約 57.3°)であるから、
,
v
v v
cos cos
sin tan
sin tan
ds dx
dx
d
dx
d
dx
ddx
1 11 2
1 1 1
2 2 2 2
2
.
. .
. .
. .
=
= +
i i
i i i
i i i
_
`
a
bbbb
bbbb
- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -(4)
と考えることが出来る。
(A)v方向の力のつり合い
式(1)は、式(4)の関係を用いれば次のように書き直せる。
v v vN
dx
dF N
dx
d
dx
ddxF dF 0
2
2
- - + =+ +] fg p
xOO
v
P
図−1曲げと圧縮を受けるはり
ds
F
F+dFdx
θ1θ2
M M+dM
xxO
v
v
x+dx
A
d v
BC
D
ENN
図−2 微小長さ要素
θ1
θ1
xO
F
v
N
θ2
θ2
xO
F+dF
v
N
図−3 AB面 図−4 CD面

-2-
上式を整理すると、
vdF N
dx
ddx 0
2
2
- =
両辺を dxで割れば、
vdx
dFN
dx
d0
2
2
- = - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -(5)
となる。ところで、たわみ vと曲げモーメント Mの関係、
vM EI
dx
d2
2
=-
を用いれば、はりに生ずるせん断力 Fと曲げモーメント Mの関係は次のように書き直せる。
vF
dx
dMEI
dx
d3
3
= =- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -(6)
また、軸力 Nと圧縮荷重 Pの関係は、
cos cosP N N or P N N1 2. .= =i i_ i
であるから、これらの関係を式(5)に代入すれば、
v vEI
dx
dP
dx
d0
4
4
2
2
- - =
ここで、PEI
2= a とおけば、
v vdx
d
dx
d0
4
42
2
2
+ =a - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -(7)
となる。微小要素 ABCDは静的なつり合いの状態にあるので、式(7)を満たしているはずである。
(B)x方向の力のつり合い
式(2)は、式(4)の関係を利用して書き直せば、次のようになる。
v v v
v v v v v
N Fdx
dF dF
dx
d
dx
ddx N
N Fdx
dF
dx
dF
dx
ddx dF
dx
ddF
dx
ddx N
0
0
2
2
2
2
2
2
+ - + + - =
+ - - - - - =
] fg p
さらに式(6)の関係を用いれば、次のように変形される。
v v v v v v v v v vN EI
dx
d
dx
dEI
dx
d
dx
dEI
dx
d
dx
ddx EI
dx
ddx
dx
dEI
dx
ddx
dx
ddx N 0
3
3
3
3
3
3
2
2
4
4
4
4
2
2
- + + + + - =
上式で 5次以上の微少量を無視すれば、
v v v vN EI
dx
d
dx
dEI
dx
d
dx
dN 0
3
3
3
3
- + - =
となり、上式は成立している(x方向の力のつり合いが成立している)ことが分かる。
(C)E点に関する力のモーメントのつり合い
式(3)は、式(4)の関係を用いれば、
v vM Nd Fdx M dM N
dx
ddx 0+ + - + - =] g
-3-
さらに整理すれば、
v vN
dx
dF
dx
dMN
dx
d0+ - - =
となる。式(6)の関係に注意すれば、上式は自ら成立していることが分かる。
以上の検討から、柱から切り出された微小要素が静的つり合い状態にあるという条件から、
v vdx
d
dx
d0
4
42
2
2
+ =a - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -(7)
ただし、
EI
P=a
が成立していなければならないことが分かる。この条件式(7)は、4階の定数係数線形同次常微分方
程式であり、固有値は 0(重根)、ia、-iaであるから、一般解は次の形である。
v sin cosx C x C x C x C1 2 3 4= + + +a a] g - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -(8)
条件式(7)は、柱が軸圧縮荷重を受けて横方向にたわんだ場合に、微小要素が静的つり合い条件を充
足していなければならないということから導かれたものであり、柱の両端の状態(例えば、固定端とか
自由端)とは無関係である。したがって、柱のたわみ式は、式(7)を満たし、かつ柱の両端の条件式
を満たす必要がある。
では次に、柱の両端の満たすべき条件について考えてみる。
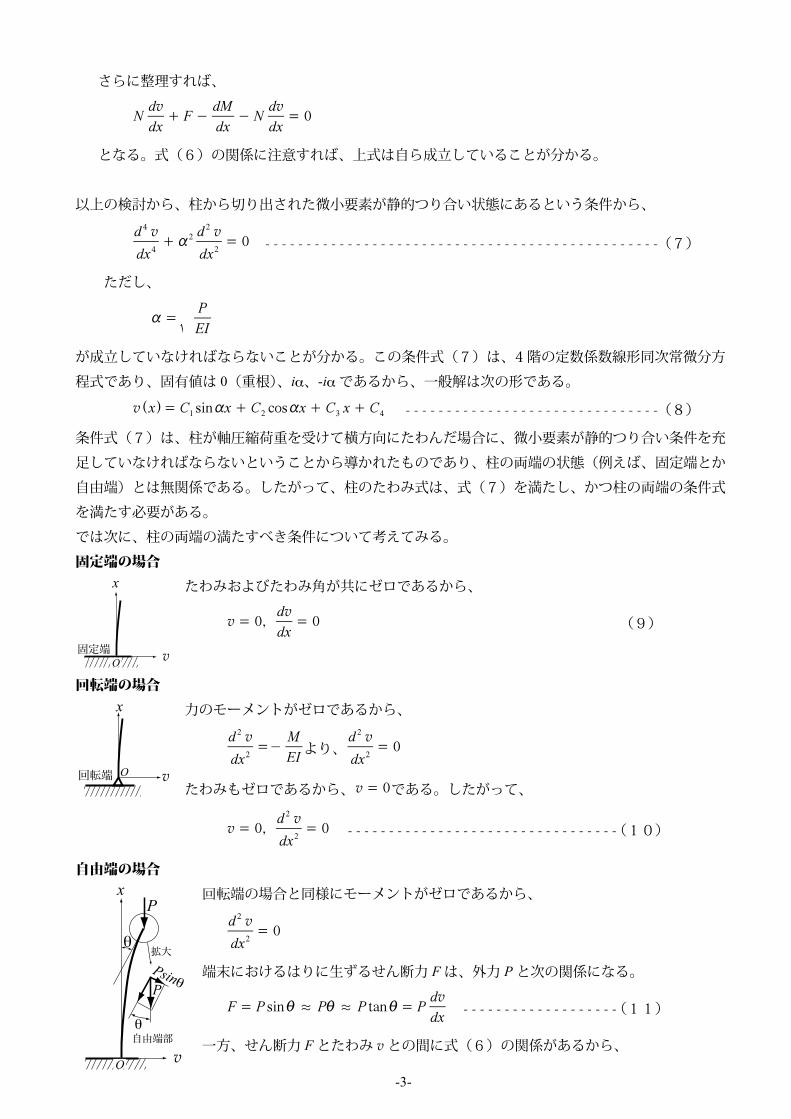
固定端の場合
たわみおよびたわみ角が共にゼロであるから、
,v vdx
d0 0= = (9)
回転端の場合
力のモーメントがゼロであるから、
vdx
d
EI
M2
2
=- より、v
dx
d0
2
2
=
たわみもゼロであるから、 0v = である。したがって、
,v vdx
d0 0
2
2
= = - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -(10)
自由端の場合
回転端の場合と同様にモーメントがゼロであるから、
vdx
d0
2
2
=
端末におけるはりに生ずるせん断力 Fは、外力 Pと次の関係になる。
vsin tanF P P P P
dx
d. .= =i i i - - - - - - - - - - - - - - - - - - -(11)
一方、せん断力 Fとたわみ vとの間に式(6)の関係があるから、
x
v固定端O
x
v回転端 O
x
v
P
θ
θ
Psinθ
自由端部
拡大
P
O
-�-
であるから、式(11)は次のように書き直せる。
v vEI
dx
dP
dx
d0
3
3
+ =
ここで
EI
P 2= a
と置いたから、
v vdx
d
dx
d0
3
32+ =a
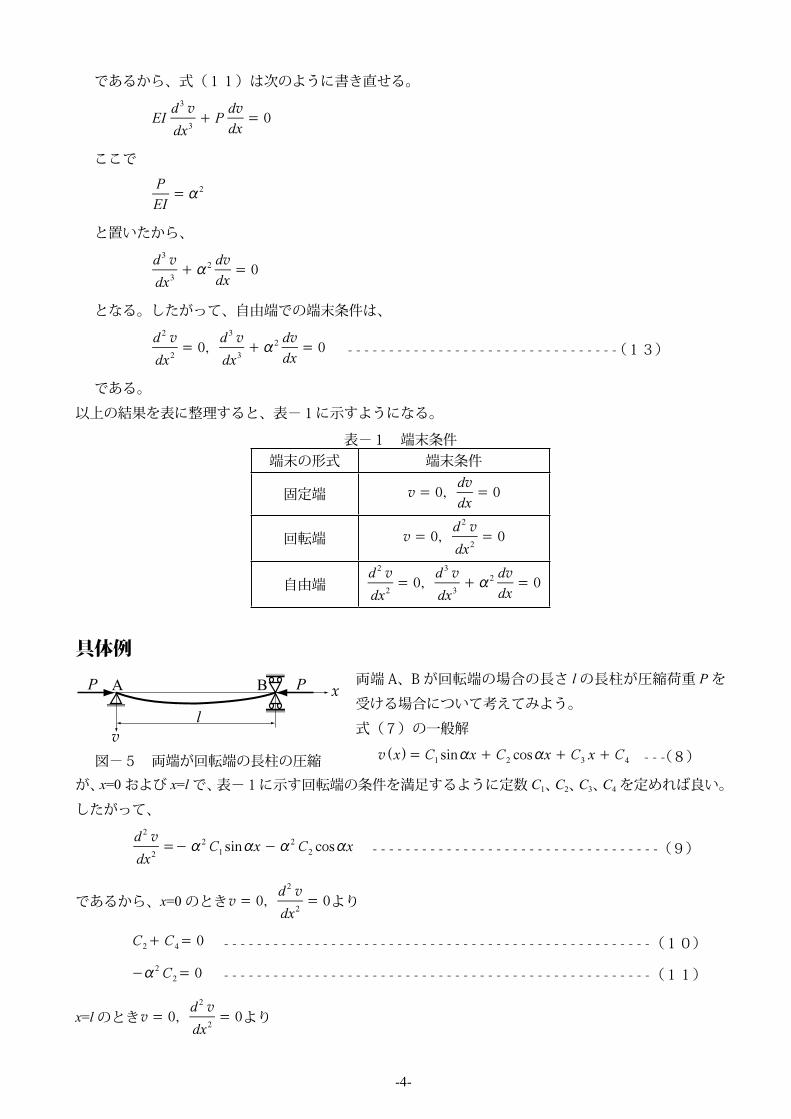
となる。したがって、自由端での端末条件は、
,v v v
dx
d
dx
d
dx
d0 0
2
2
3
32= + =a - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -(13)
である。
以上の結果を表に整理すると、表−1に示すようになる。
表−1 端末条件端末の形式 端末条件
固定端 ,v vdx
d0 0= =
回転端 ,v vdx
d0 0
2
2
= =
自由端 ,v v v
dx
d
dx
d
dx
d0 0
2
2
3
32= + =a
具体例両端 A、Bが回転端の場合の長さ lの長柱が圧縮荷重 Pを
受ける場合について考えてみよう。
式(7)の一般解
v sin cosx C x C x C x C1 2 3 4= + + +a a] g -- -- --(8)
が、x=0および x=lで、表−1に示す回転端の条件を満足するように定数 C1、C2、C3、C�を定めれば良い。
したがって、
vsin cos
dx
dC x C x
2
22
1
2
2=- -a a a a - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -(9)
であるから、x=0のとき ,v vdx
d0 0
2
2
= = より
C C 02 4+ = - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -(10)
C 02
2- =a - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -(11)
x=lのとき ,v vdx
d0 0
2
2
= = より
P PA B
lv
x
図−5 両端が回転端の長柱の圧縮
-5-
sin cosC l C l C l C 01 2 3 4+ + + =a a - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -(12)
sin cosC l C l 02
1
2
2- - =a a a a - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -(13)
式(10)から(13)を行列を用いて表わせば、
sin
sin
cos
cos
l
l
l
l
l
C
C
C
C
0
0
1 0
0
0
1
0
1
0
0
0
0
02
2
2
1
2
3
4-
-
-
=a
a a
a
a
a a
J
L
KKKKK
J
L
KKKKKK
J
L
KKKKK
N
P
OOOOO
N
P
OOOOOO
N
P
OOOOO
定数 C1、C2、C3、C�が同時に 0とならない解が存在するためには、係数行列式が 0、すなわち
sin
sin
cos
cos
l
l
l
l
l
0
0
1 0
0
0
1
0
1
0
0
2
2
2-
-
-
=a
a a
a
a
a a
でなければならない。上式から次式が得られる。
sinl l 04 =a a
l 04 !a であるから、
sin l 0=a
となる。したがって、 , >PEI
l0 0F=a であるから l 0Fa であることを考慮すれば、
, , , ,l n n 0 1 2 3 g= =a r ^ h
であれば良い。
EI
P=a
であるから、上式に代入し辺々 2乗すれば、
EI
Pl n2 2 2= r
となるから、荷重 Pを求めると
, , ,P EIl
nn 1 2 3
2
2 2
g= =r
^ h
となる。ただし、n=0のときは P=0となるからこれを除いた。上式から得られる最小の荷重はn 1= の
ときであり、このときの荷重をオイラーの座屈荷重 Pcrと呼んでいる。
P EIl
cr 2
2
=r - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -(14)
柱の軸に垂直な断面積を Aとすれば、オイラーの座屈応力 scrは次のようになる。
A
PE
A
I
lE
A
Ar
lE
r
lEcr
cr
2
2 2
2
2 2
2
2
2= = = = =v
r r r
m
r
d n - - - - - - - - - - - - - - - - - - - - - - - -(15)
ただし、
r;断面2次半径( I Ar2= )
-�-
l:細長比( lr
=m )
また、定数 C1、C2、C3、C�を求めると、C C C 02 3 4= = = となり、圧縮荷重がオイラーの座屈荷重と等
しいとき、
EI
P
EIEI
l l
1cr
2
2
= = =ar r
となるから、たわみ v(x)は、
v sinx Cl
x1=r
] g
となる。
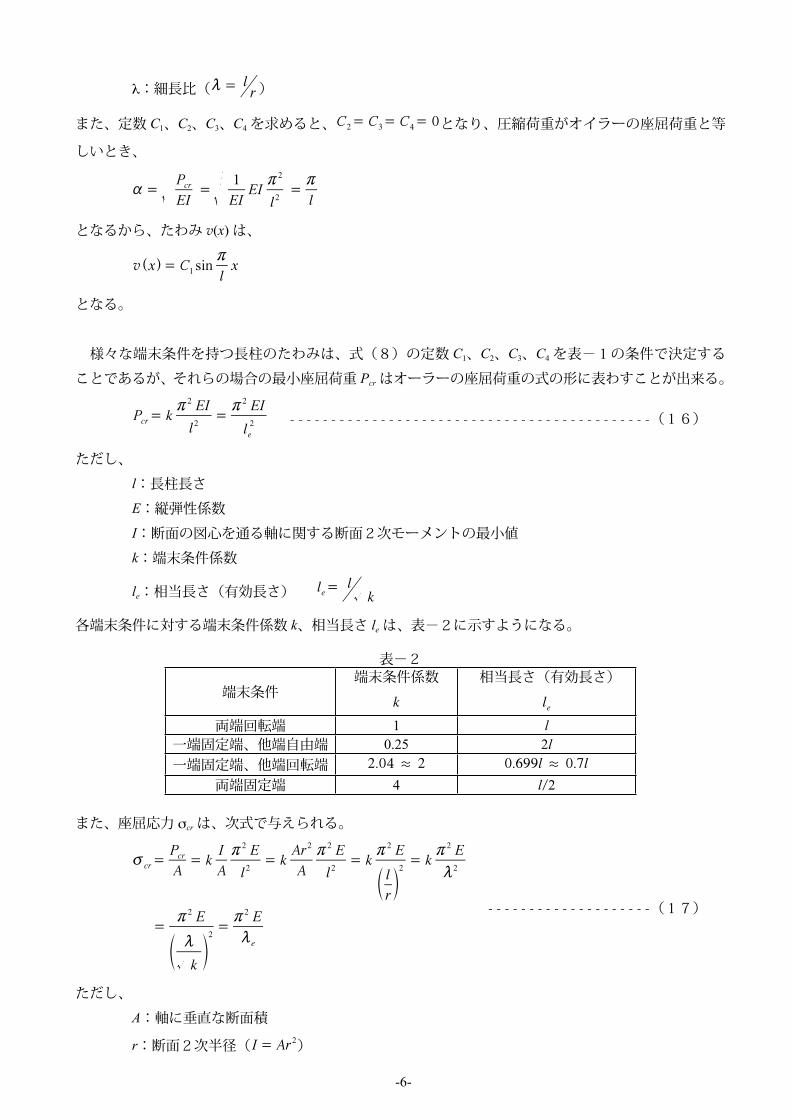
様々な端末条件を持つ長柱のたわみは、式(8)の定数 C1、C2、C3、C�を表−1の条件で決定する
ことであるが、それらの場合の最小座屈荷重 Pcrはオーラーの座屈荷重の式の形に表わすことが出来る。
P kl
EI
l
EIcr
e
2
2
2
2
= =r r
- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -(16)
ただし、
l:長柱長さ
E:縦弾性係数
I:断面の図心を通る軸に関する断面2次モーメントの最小値
k:端末条件係数
le:相当長さ(有効長さ) l lke =
各端末条件に対する端末条件係数 k、相当長さ leは、表−2に示すようになる。
また、座屈応力 scrは、次式で与えられる。
A
Pk
A
I
l
Ek
A
Ar
l
Ek
r
l
Ek
E
k
E E
crcr
e
2
2 2
2
2 2
2
2
2 2
2
2
= = = = =
= =
vr r r
m
r
m
r
m
r
d
e
n
o
- - - - - - - - - - - - - - - - - - - - -(17)
ただし、
A:軸に垂直な断面積
r:断面2次半径( I Ar2= )
表−2
端末条件端末条件係数
k
相当長さ(有効長さ)
le
両端回転端 1 l一端固定端、他端自由端 0.25 2l
一端固定端、他端回転端 .2 04 2. . .l l0 699 0 7.
両端固定端 � l/2
-7-
l:細長比( lr
=m )
le:相当細長比( kl
ree= =m m )
式(16)、(17)から分かるように、座屈荷重、座屈応力は長柱の長さ lが短くなるに従い増大する。
ここでの説明で導かれた座屈荷重、座屈応力は、弾性変形を仮定している。したがって、圧縮の比例限
度以下の座屈荷重、座屈応力を与える leに対しては有効である。オイラーの座屈荷重が有効性を失う
短い柱に対しては、幾つかの実験式が与えられている。
問題 一端固定端、他端自由端の条件のもとで長さ l=2.5m、断面が80 100mm mm# の矩形断面を持つ鋼材
の座屈荷重 Pcrを求めよ。ただし、縦弾性係数 Eは 20�GPa、安全率を 3として求めよ。
解答 式(16)に表−2で与えられる相当長さ leを代入すれば求められる。断面2次モーメント Iの値は、
幅 bが 100mm、高さ hが 80mmと考えた方が、幅 bが 80mm、高さ hが 100mmと考えるよりも小さい。
したがって、
.Ibh
12 12
100 104 27 10
80 10mm
m3 36 4
33
##
# #= = =
--
-^ ^h h
表−2から、
.l l2 2 2 5 5m me #= = =
したがって、式(16)を用いれば、
.
. .Pl
EI
N
5
206 10 4 27 10
3 473 10 347 3m
mm
N kNcr
e
2
2
2
2 9
2
6 4
5
# # # #
#.= = =r
r -
] g
安全率を 3とすることから、座屈荷重 Pcrは上で求めた荷重の 1/3となり、
P 116kNcr =
となる。
問題 縦横寸法が120 90mm mm# の矩形断面を持つ長さ lが 3.0mの木製の柱がある。両端固定の場合、こ
の柱の座屈荷重を求めよ。ただし、縦弾性係数 Eを 7.8GPaとする。
解答 最小の断面2次モーメント Iは、幅 bが 120mm、厚さ hが 90mmの場合である。したがって、
.Ibh
12 12
120 107 290 10
90 10mm
m3 36 4
33
##
# #= = =
--
-^ ^h h
座屈荷重 Pcrは式(16)に表−2から得られる相当長さ le=l/2を代入すると、

-8-
.
. ..P
l
EIN
3 02
7 9 10 7 290 102 5262 10 253
mm m
N kNcr
e
2
2
2
2 92
6 4
5# # # #
# .= = =r r -
a k
となる。
長柱の座屈
-�-
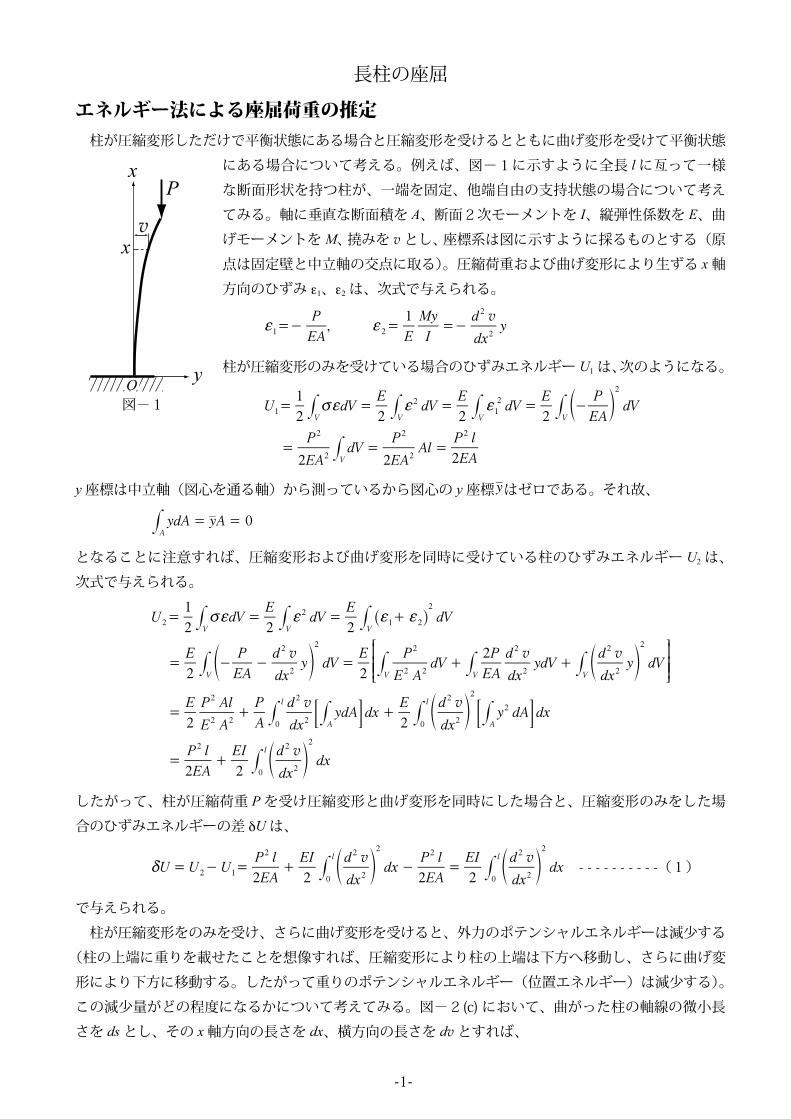
エネルギー法による座屈荷重の推定 柱が圧縮変形しただけで平衡状態にある場合と圧縮変形を受けるとともに曲げ変形を受けて平衡状態
にある場合について考える。例えば、図−1に示すように全長 lに亙って一様
な断面形状を持つ柱が、一端を固定、他端自由の支持状態の場合について考え
てみる。軸に垂直な断面積を A、断面2次モーメントを I、縦弾性係数を E、曲
げモーメントを M、撓みを vとし、座標系は図に示すように採るものとする(原
点は固定壁と中立軸の交点に取る)。圧縮荷重および曲げ変形により生ずる x軸
方向のひずみ e1、e2は、次式で与えられる。
,v
EA
P
E I
My
dx
dy
11 2 2
2
=- = =-f f
柱が圧縮変形のみを受けている場合のひずみエネルギー U1は、次のようになる。
U dVE
dVE
dVE
EA
PdV
EA
PdV
EA
PAl
EA
P l
2
1
2 2 2
2 2 2
V V V V
V
1
2
1
2
2
2
2
2 2
2
= = = = -
= = =
vf f f d n# # # #
#
y座標は中立軸(図心を通る軸)から測っているから図心の y座標yはゼロである。それ故、
ydA yA 0A
= =#
となることに注意すれば、圧縮変形および曲げ変形を同時に受けている柱のひずみエネルギー U2は、
次式で与えられる。
v v v
v v
v
U dVE
dVE
dV
E
EA
P
dx
dy dV
E
E A
PdV
EA
P
dx
dydV
dx
dy dV
E
E A
P Al
A
P
dx
dydA dx
E
dx
dy dA dx
EA
P l EI
dx
ddx
2
1
2 2
2 2
2
2 2
2 2
V V V
V V VV
l
A
l
A
l
2
2
1 2
2
2
22
2 2
2
2
2
2
22
2 2
2
2
2
02
22
0
2
2
2
22
0
= = = +
= - - = + +
= + +
= +
vf f f f_
f f
f
f
i
p p
p
p
R
T
SSS
; ;
V
X
WWW
E E
# # #
# # ##
# # # #
#
したがって、柱が圧縮荷重 Pを受け圧縮変形と曲げ変形を同時にした場合と、圧縮変形のみをした場
合のひずみエネルギーの差 dUは、
v vU U U
EA
P l EI
dx
ddx
EA
P l EI
dx
ddx
2 2 2 2
l l
2 1
2
2
2
0
2
2
22
0
2
= - = + - =d f fp p# # - - - - - - - - - - -(1)
で与えられる。
柱が圧縮変形をのみを受け、さらに曲げ変形を受けると、外力のポテンシャルエネルギーは減少する
(柱の上端に重りを載せたことを想像すれば、圧縮変形により柱の上端は下方へ移動し、さらに曲げ変
形により下方に移動する。したがって重りのポテンシャルエネルギー(位置エネルギー)は減少する)。
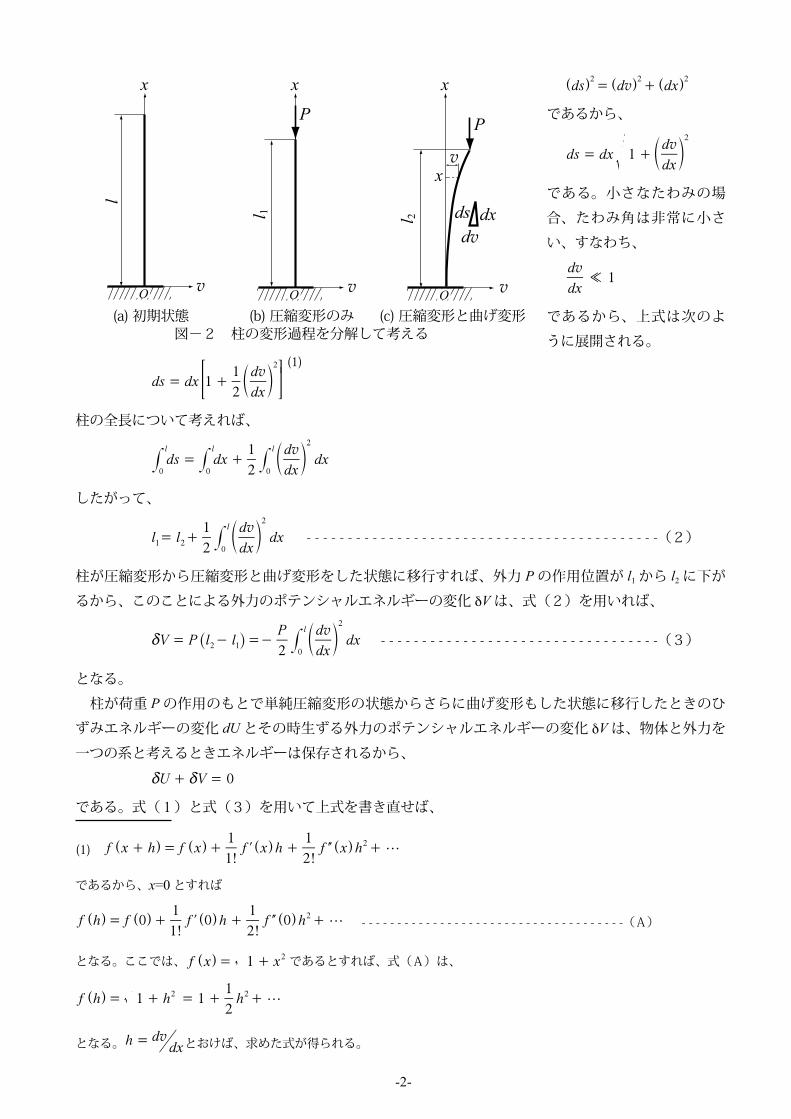
この減少量がどの程度になるかについて考えてみる。図−2(c) において、曲がった柱の軸線の微小長
さを dsとし、その x軸方向の長さを dx、横方向の長さを dvとすれば、
x
xv
P
Oy
図−1
-2-
vds d dx2 2 2= +] ] ]g g g
であるから、
vds dx
dx
d1
2
= + d n
である。小さなたわみの場
合、たわみ角は非常に小さ
い、すなわち、
vdx
d1%
であるから、上式は次のよ
うに展開される。
vds dx
dx
d1
2
12
= + d n> H-�
-(�)
柱の全長について考えれば、
vds dx
dx
ddx
2
1l l l
0 0 0
2
= + d n# # #
したがって、
vl l
dx
ddx
2
1 l
1 20
2
= + d n# - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -(2)
柱が圧縮変形から圧縮変形と曲げ変形をした状態に移行すれば、外力 Pの作用位置が l1から l2に下が
るから、このことによる外力のポテンシャルエネルギーの変化 dVは、式(2)を用いれば、
vV P l l
P
dx
ddx
2
l
2 1
2
0
= - =-d _ di n# - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -(3)
となる。
柱が荷重 Pの作用のもとで単純圧縮変形の状態からさらに曲げ変形もした状態に移行したときのひ
ずみエネルギーの変化 dUとその時生ずる外力のポテンシャルエネルギーの変化 dVは、物体と外力を
一つの系と考えるときエネルギーは保存されるから、
U V 0+ =d d
である。式(1)と式(3)を用いて上式を書き直せば、
(�) ! !
f x h f x f x h f x h1
1
2
1 2 g+ = + + +l m] ] ] ]g g g g
であるから、x=0とすれば
! !f h f f h f h0
1
10
2
10 2 g= + + +l m] ] ] ]g g g g - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -(A)
となる。ここでは、 f x x1 2= +] g であるとすれば、式(A)は、
f h h h1 12
12 2 g= + = + +] g
となる。 vh ddx
= とおけば、求めた式が得られる。
x
vO
l
x
v
P
O
l 1
x
xv
P
O v
dsdv
dxl 2
(a) 初期状態 (b) 圧縮変形のみ (c) 圧縮変形と曲げ変形図−2 柱の変形過程を分解して考える
-�-
v vEI
dx
ddx P
dx
ddx 0
l l
2
2
0 0
2 2
- =f dp n# #
となる。上式を部分積分すると、次式が得られる。
v v v v vv v vEIdx
d
dx
d d
dx
ddx
dx
d
dx
ddx P
dx0
x
x ll
x
x ll
2
2
2
2
03
3
0 0 0
- - - ==
=
=
=R
T
SSS
R
T
SSS
V
X
WWW
V
X
WWW# #
上式の左辺第 �項の積分をさらに部分積分すれば、次のように変形される。
v v v v v v v v v vEI
dx
d
dx
d
dx
d
dx
ddx P
dx
d
dx
ddx 0
x
x l
x
x ll
x
x ll
2
2
03
3
04
4
0 02
2
0
- + - - ==
=
=
=
=
=R
T
SSS
R
T
SSS
V
X
WWW
V
X
WWW# #
上式をさらに整理すれば、
0dxv v v EI v v v EI v v
EIdx
d
dx
d
dx
dP
dx
d
dx
dP
dx
d
00
x
x ll
x
x l
2
2
03
3
4
4
2
2
- + + + ==
=
=
=
f p * 4# - - - - - -(4)
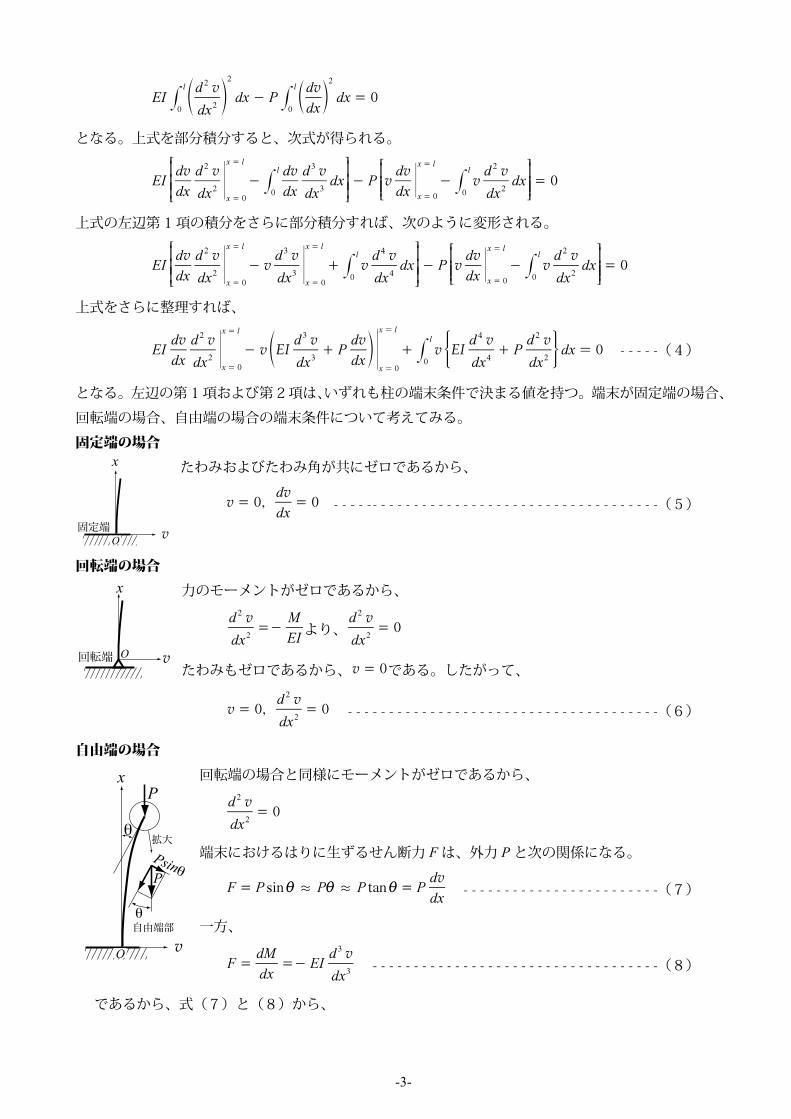
となる。左辺の第�項および第2項は、いずれも柱の端末条件で決まる値を持つ。端末が固定端の場合、
回転端の場合、自由端の場合の端末条件について考えてみる。
固定端の場合
たわみおよびたわみ角が共にゼロであるから、
,v vdx
d0 0= = -- -- -- -- -- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -(5)
回転端の場合
力のモーメントがゼロであるから、
vdx
d
EI
M2
2
=- より、v
dx
d0
2
2
=
たわみもゼロであるから、 0v = である。したがって、
,v vdx
d0 0
2
2
= = - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -(6)
自由端の場合
回転端の場合と同様にモーメントがゼロであるから、
vdx
d0
2
2
=
端末におけるはりに生ずるせん断力 Fは、外力 Pと次の関係になる。
vsin tanF P P P P
dx
d. .= =i i i - - - - - - - - - - - - - - - - - - - - - - - - -(7)
一方、
vF
dx
dMEI
dx
d3
3
= =- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -(8)
であるから、式(7)と(8)から、
x
v固定端O
x
v回転端 O
x
v
P
θ
θ
Psinθ
自由端部
拡大
P
O
-�-
v vEI
dx
dP
dx
d0
3
3
+ =
ここで
EI
P 2= a
とおけば、
v vdx
d
dx
d0
3
32+ =a
となる。したがって、自由端での端末条件は、
,v v v
dx
d
dx
d
dx
d0 0
2
2
3
32= + =a - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -(9)
である。
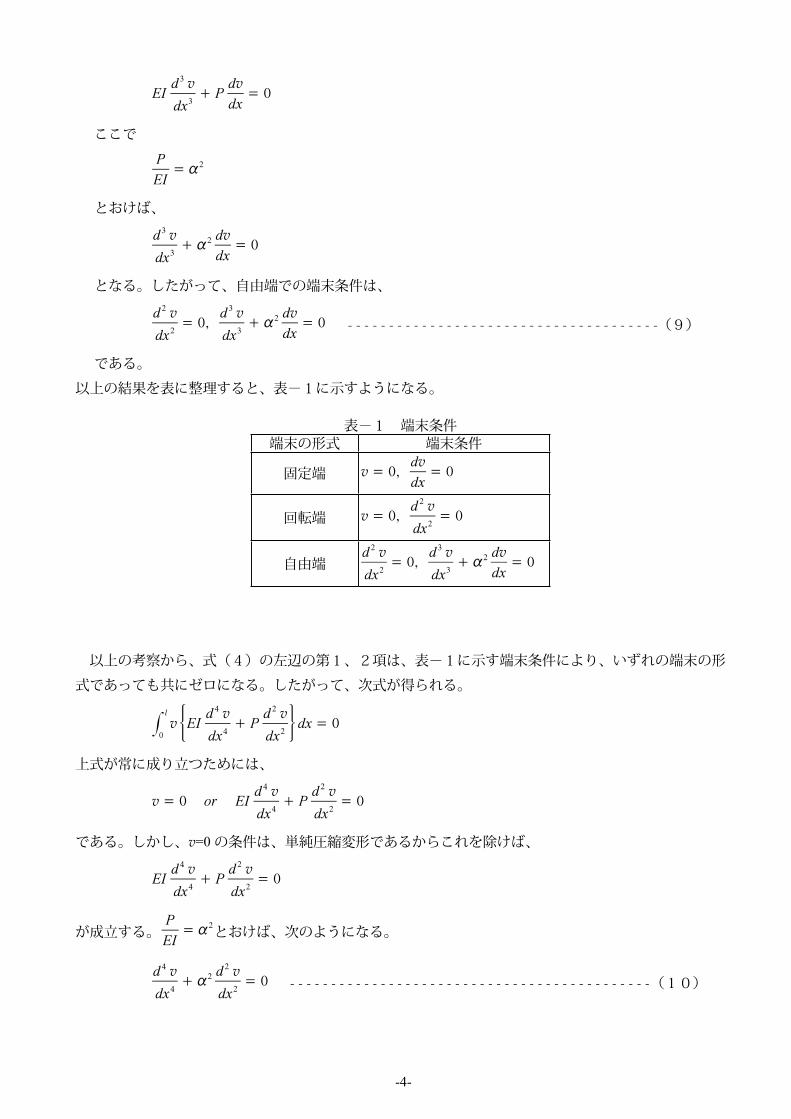
以上の結果を表に整理すると、表−1に示すようになる。
以上の考察から、式(4)の左辺の第1、2項は、表−1に示す端末条件により、いずれの端末の形
式であっても共にゼロになる。したがって、次式が得られる。
v v vEI
dx
dP
dx
ddx 0
l
4
4
2
2
0
+ =* 4#
上式が常に成り立つためには、
v v vor EI
dx
dP
dx
d0 0
4
4
2
2
= + =
である。しかし、v=0の条件は、単純圧縮変形であるからこれを除けば、
v vEI
dx
dP
dx
d0
4
4
2
2
+ =
が成立する。EI
P 2= a とおけば、次のようになる。
v vdx
d
dx
d0
4
42
2
2
+ =a - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -(10)
表−1 端末条件端末の形式 端末条件
固定端 ,v vdx
d0 0= =
回転端 ,v vdx
d0 0
2
2
= =
自由端 ,v v v
dx
d
dx
d
dx
d0 0
2
2
3
32= + =a