Embed Size (px)
DESCRIPTION
上节回顾. 1 图像的辐射纠正 2 数字图像的增强技术 3 软件实习 4 作业布置. 6 遥感图像的几何畸变 和几何纠正方法. 本节内容. 6.1 遥感图像坐标系统 6.2 遥感图像几何畸变 6.3 遥感图像几何纠正方法 6.4 软件实习. 6.1 遥感图像坐标系统. 1) 遥感器坐标系统 S-UVW U 轴 : 遥感器飞行方向 V 轴 : 垂直于 U 轴 W 轴 : 垂直于 UV 平面 2) 地面坐标系统 O-XYZ Z 轴 : 原点处天顶方向 XY 平面垂至于 Z 轴 3) 图像坐标系统 o-xyf - PowerPoint PPT Presentation
Citation preview

1
上节回顾上节回顾1 图像的辐射纠正2 数字图像的增强技术3 软件实习4 作业布置

2
6 6 遥感图像的几何畸变遥感图像的几何畸变和几何纠正方法和几何纠正方法
3
本节内容本节内容6.1 遥感图像坐标系统6.2 遥感图像几何畸变6.3 遥感图像几何纠正方法6.4 软件实习
4
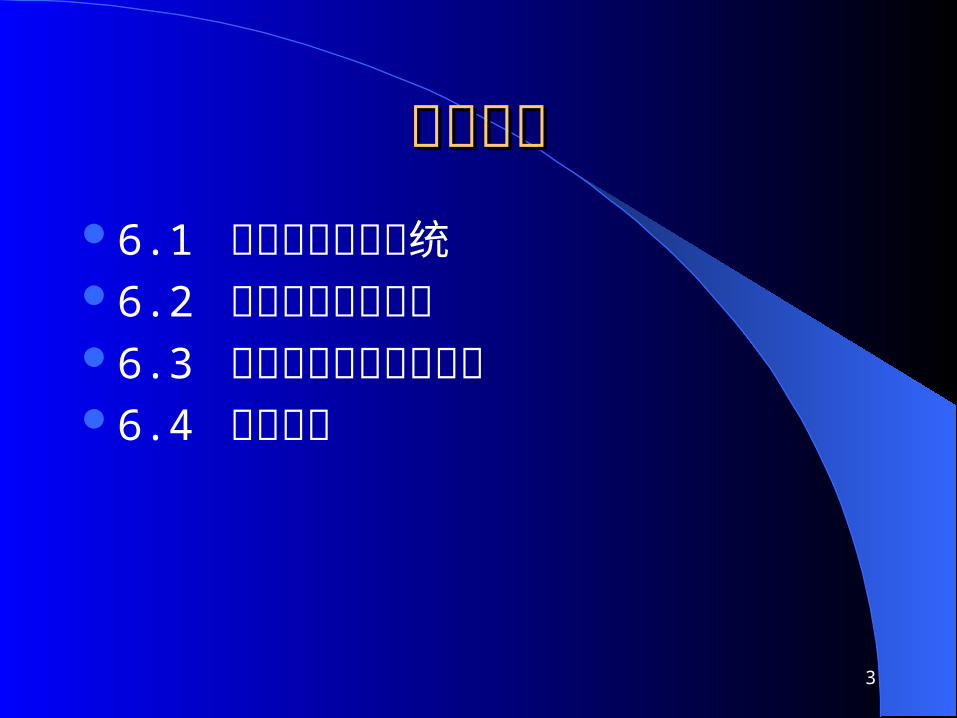
1) 遥感器坐标系统S-UVW
U 轴 : 遥感器飞行方向V 轴 : 垂直于 U 轴W 轴 : 垂直于 UV 平面2) 地面坐标系统O-XYZ
Z 轴 : 原点处天顶方向XY 平面垂至于 Z 轴3) 图像坐标系统o-xyfx y f 分别平行于 UVW 轴
6.1 遥感图像坐标系统
5
WVU
AZYX
ZYX
P o
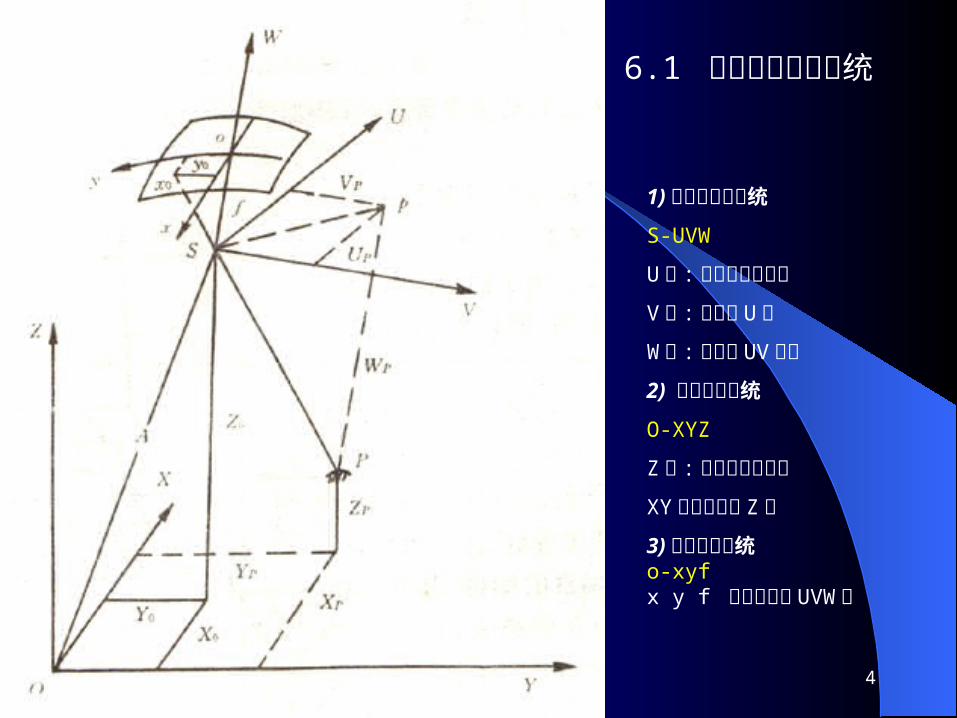
地面点 P 在地面坐标中的坐标
遥感器坐标系的原点 o 在地面坐标中的坐标P 点在遥感器坐标系中的坐标 , 不同的遥感器不同
321321321
cccbbbaaa
A
6.1 遥感图像坐标系统 ( 续 1)
6
sinsinsincoscos1 a
cossinsinsincos2 a
cossin3 a
sincos1 b
coscos2 b
sin3 b
sinsincoscossin1 c
cossincossinsin2 c
coscos3 c
6.1 遥感图像坐标系统 ( 续 2)
7
6.26.2 遥感图像几何畸变遥感图像几何畸变 6.2.1 遥感器本身引起的畸变 6.2.2 外部因素引起的畸变 6.2.3 处理过程中引起的畸变
8
6.2.16.2.1 遥感器本身引起的畸变遥感器本身引起的畸变 遥感器本身引起的几何畸变与遥感器的结构、特性和工作方式不同而异。这些因素主要包括: 1 ) 透镜的辐射方向畸变像差; 2 ) 透镜的切线方向畸变像差; 3 ) 透镜的焦距误差; 4 ) 透镜的光轴与投影面不正交; 5 ) 图像的投影面非平面; 6 ) 探测元件排列不整齐; 7 ) 采样速率的变化; 8 ) 采样时刻的偏差 ; 9) 扫描镜的扫描速度变化 。
9
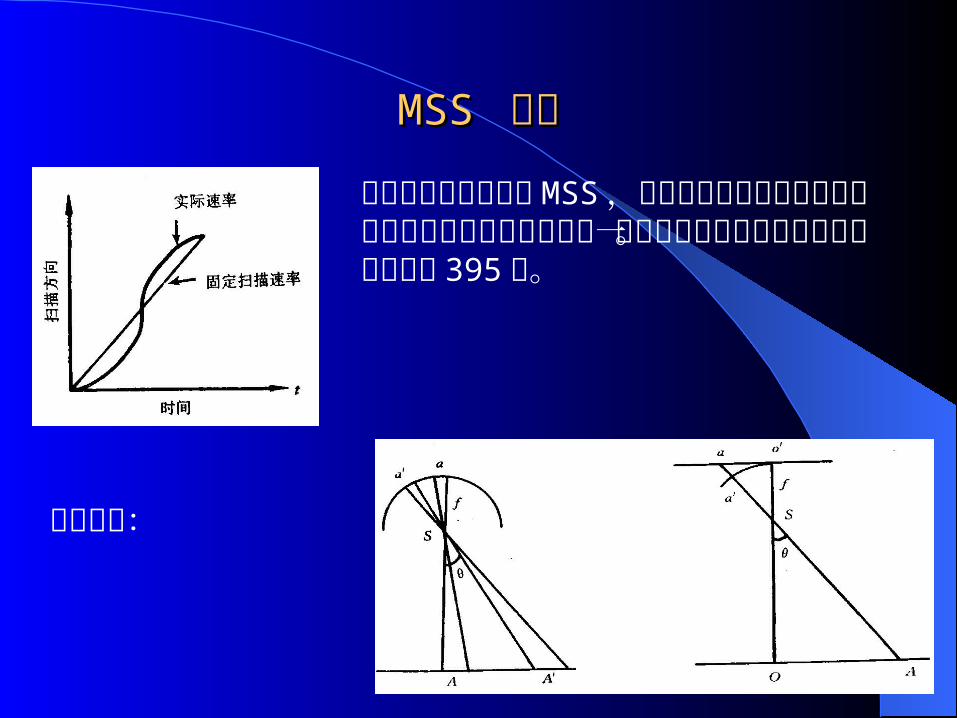
MSS MSS 举例举例例如扫描形式成像的 MSS ,产生的几何畸变主要是由于扫描镜的非线性振动和其它一些偶然因素引起的。在地面上影响可达 395 米。
全景畸变:
10
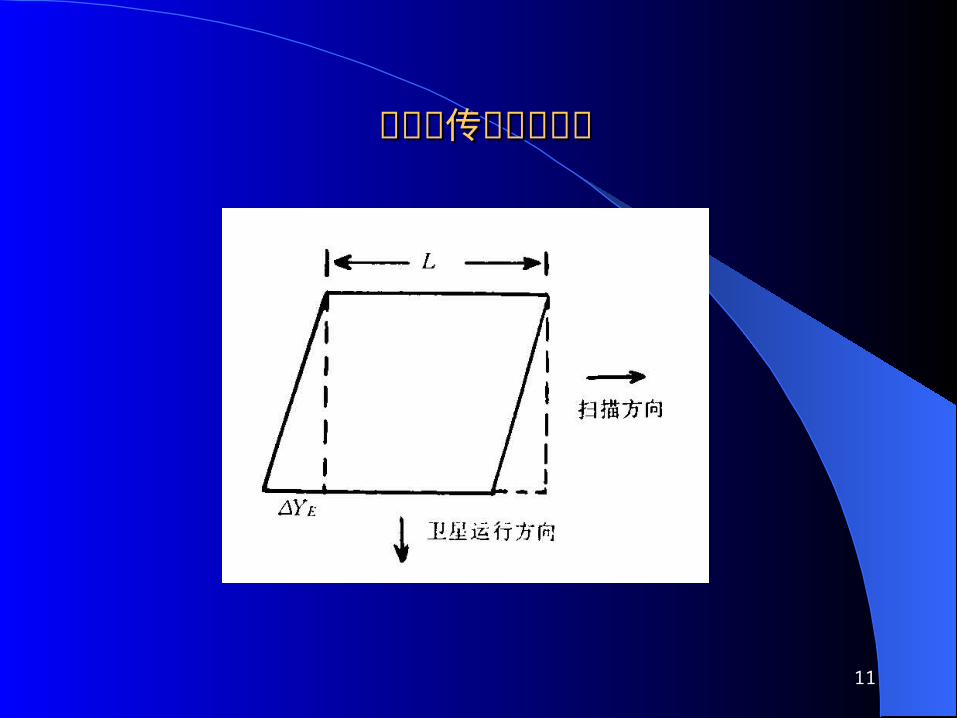
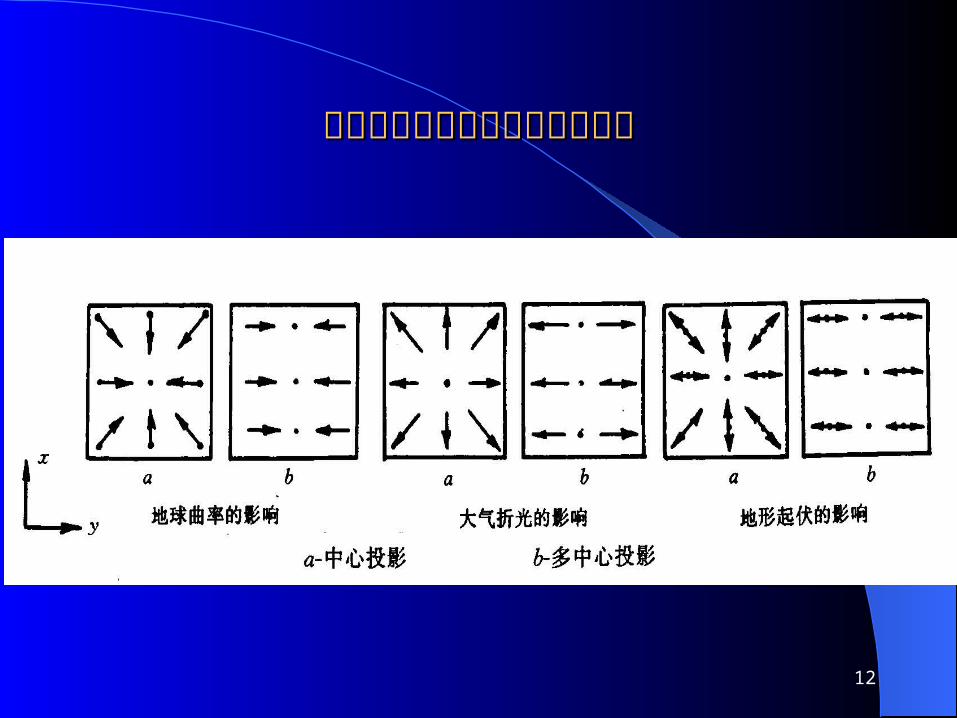
6.2.26.2.2 外部因素引起的畸变外部因素引起的畸变 影响图像变形的外部因素包括: 1 ) 地球的曲率 2 ) 大气密度差引起的折光 3 ) 地形起伏 4 ) 地球自传 5 ) 遥感器轨道位置和姿态等
11
地球自传引起的误差地球自传引起的误差
12
地球曲率和地形起伏引起的误差地球曲率和地形起伏引起的误差
13
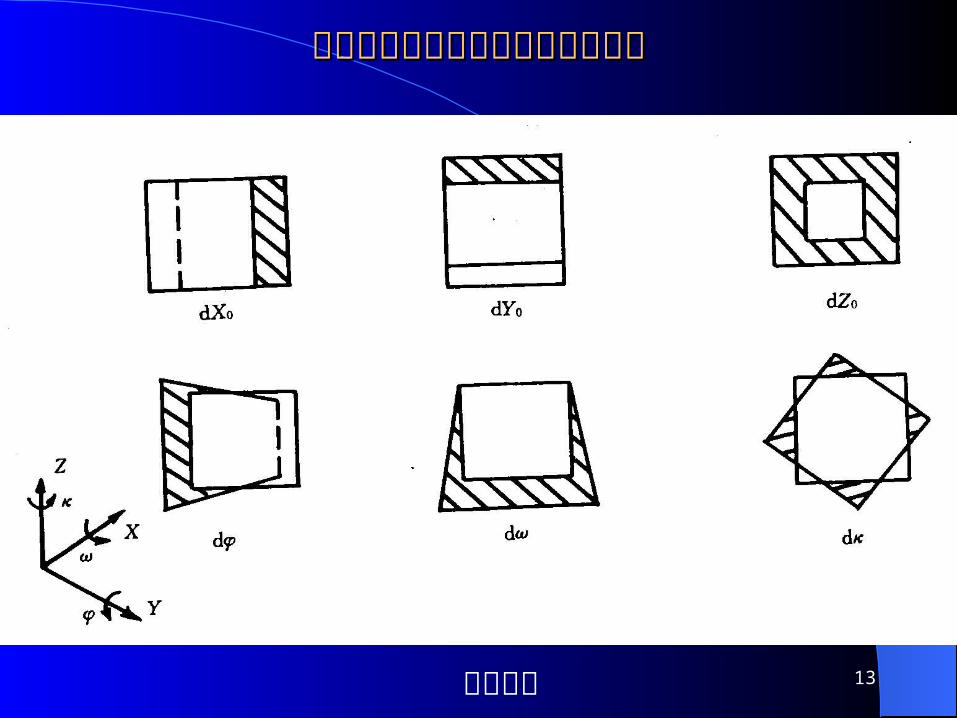
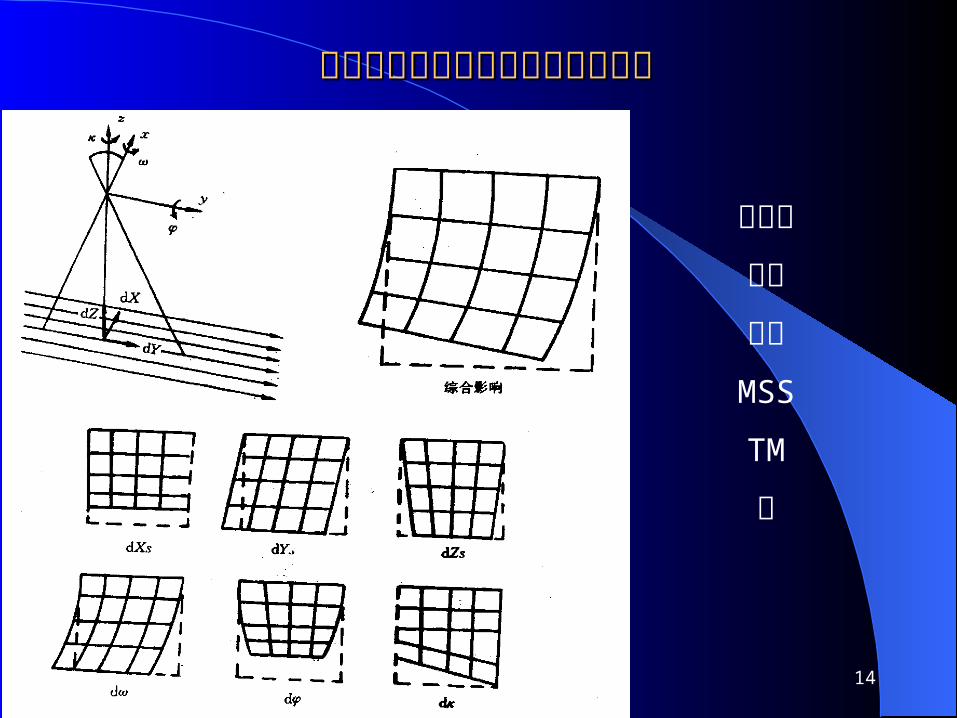
遥感器轨道位置和姿态引起的误差遥感器轨道位置和姿态引起的误差
中心投影
14
遥感器轨道位置和姿态引起的误差遥感器轨道位置和姿态引起的误差
多中心投影例如MSS
TM
等
15
6.2.3 6.2.3 处理过程中引起的畸变处理过程中引起的畸变遥感图像再处理过程中产生的误差,主要是由于处理设备产生的噪声引起的。传输、复制、 光学 数字
16
6.3 6.3 遥感图像的几何纠正方法遥感图像的几何纠正方法 遥感图像的几何粗处理和精处理。 遥感图像的几何纠正按照处理方式分为光学纠正和数字纠正。 光学纠正主要用于早期的遥感图像的处理中,现在的应用已经不多。除了对框幅式的航空照片(中心投影)可以进行比较严密的纠正以外,对于大多数动态获得的遥感影像只能进行近似的纠正。 主要介绍数字图像的几何纠正。

17
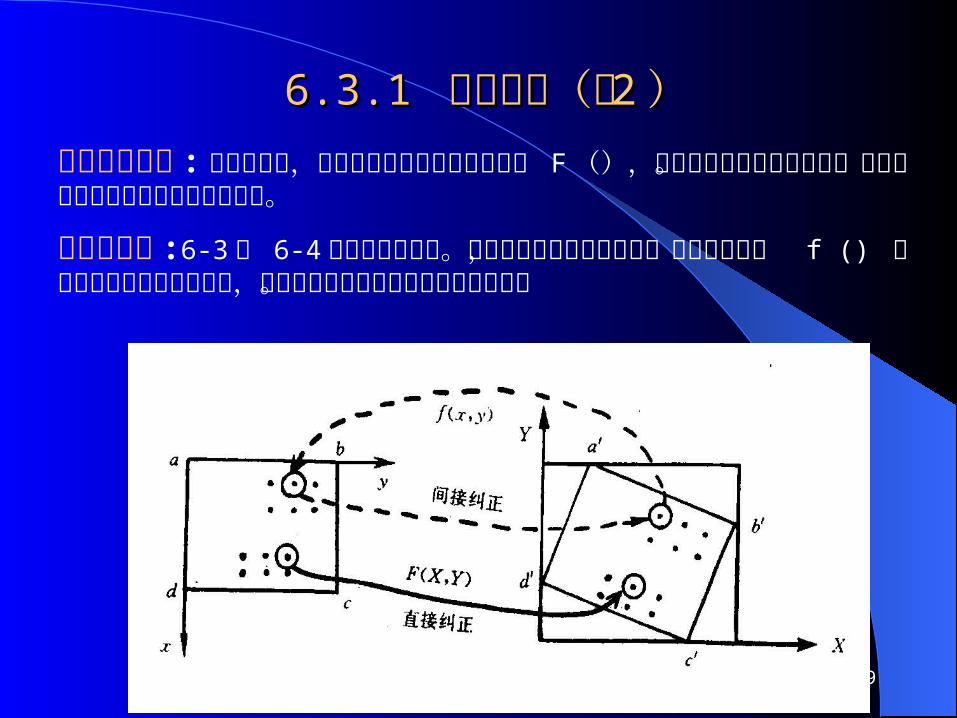
6.3.1 6.3.1 坐标关系坐标关系 数字图像几何纠正:通过计算机对离散结构的数字图像中的每一个像元逐个进行纠正处理的方法。 这种方法能够精确地改正动态扫描图像的误差。 基本原理:利用图像坐标和地面坐标(另一图像坐标、地图坐标等)之间的数学关系,即输入图像和输出图像间的坐标转换关系实现。
18
6.3.1 6.3.1 坐标关系(续坐标关系(续 11 ))
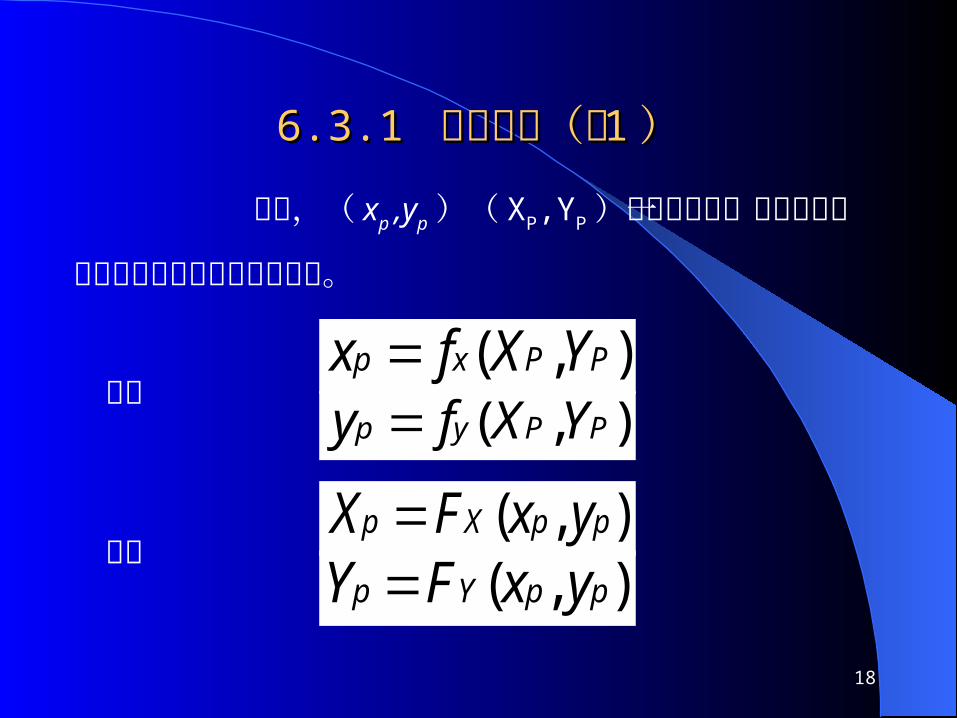
),( ppXp yxFX ),( ppYp yxFY
),( PPxp YXfx ),( PPyp YXfy
其中,( xp ,yp )( XP,YP )分别是任意一个像元在原始图像和纠正后图像中的坐标。
直接
间接
19
直接纠正方法 : 从原始图像,依次对每个像元根据变换函数 F (),求得它在新图像中的位置。并将灰度值付给新图像的对应位置上。间接纠正法 :6-3 和 6-4 是反解变换公式。从新图像中依次每个像元,根据变换函数 f () 找到它在原始图像中的位置,并将图像的灰度值赋予新图像的像元。
6.3.1 6.3.1 坐标关系(续坐标关系(续 22))
20
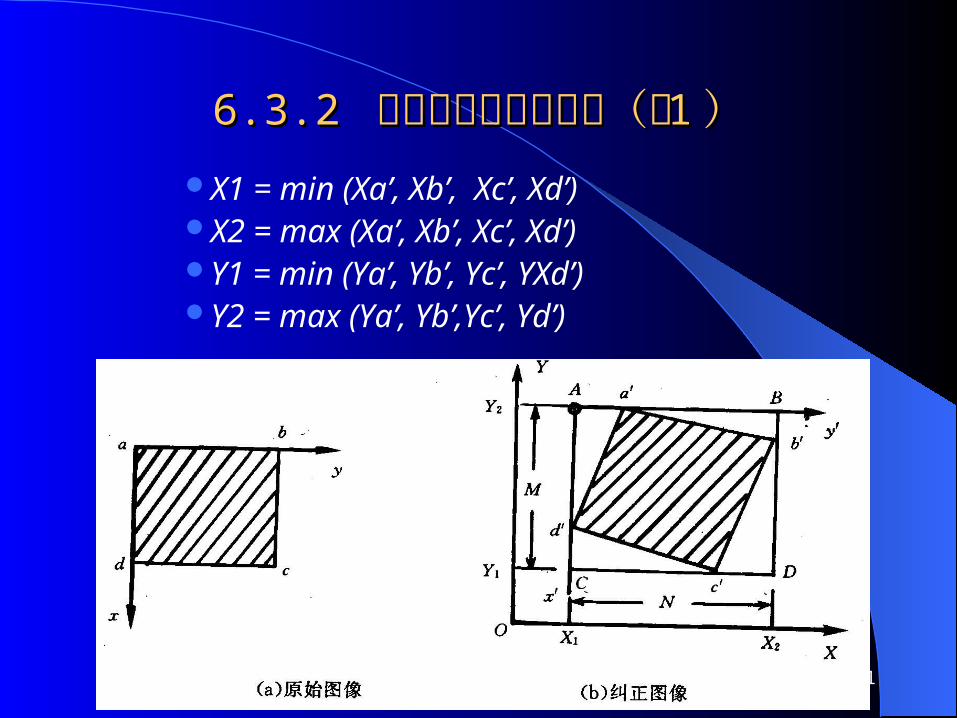
6.3.2 6.3.2 确定新的图像的边界确定新的图像的边界 纠正后图像和原始图像的形状、大小、方向都不一样。所以在纠正过程的实施之前,必须首先确定新图像的大小范围。 根据公式 6- 1 , 6- 2 求出原始图像四个角点( a, b,
c, d )在纠正后图像中的对应点( a’, b’, c’, d’ )的坐标( Xa’,Ya’ ) (Xb’,Yb’) (Xc’,Yc’) (Xd’,Yd’) , 然后求出最大值和最小值。
21
6.3.2 6.3.2 确定新的图像的边界(续确定新的图像的边界(续 11 ))X1 = min (Xa’, Xb’, Xc’, Xd’)X2 = max (Xa’, Xb’, Xc’, Xd’)Y1 = min (Ya’, Yb’, Yc’, YXd’)Y2 = max (Ya’, Yb’,Yc’, Yd’)
22
6.3.3 6.3.3 确定新图像的分辨率确定新图像的分辨率目的是确定新图像宽度和高度; 根据精度要求,在新图像的范围内,划分网格,每个网格点就是一个像元。 新图像的行数 M= (Y2-Y1)/△Y+1; 新图像的列数 N= (X2-X1)/△X+1;
新图像的任意一个像元的坐标由它的行列号唯一确定。
23
6.3.4 6.3.4 灰度的重采样灰度的重采样 纠正后的新图像的每一个像元,根据变换函数,可以得到它在原始图像上的位置。如果求得的位置为整数,则该位置处的像元灰度就是新图像的灰度值。 如果位置不为整数,则有几种方法: 1) 最近邻法 2) 双线性内插法 3)三次卷积法
24
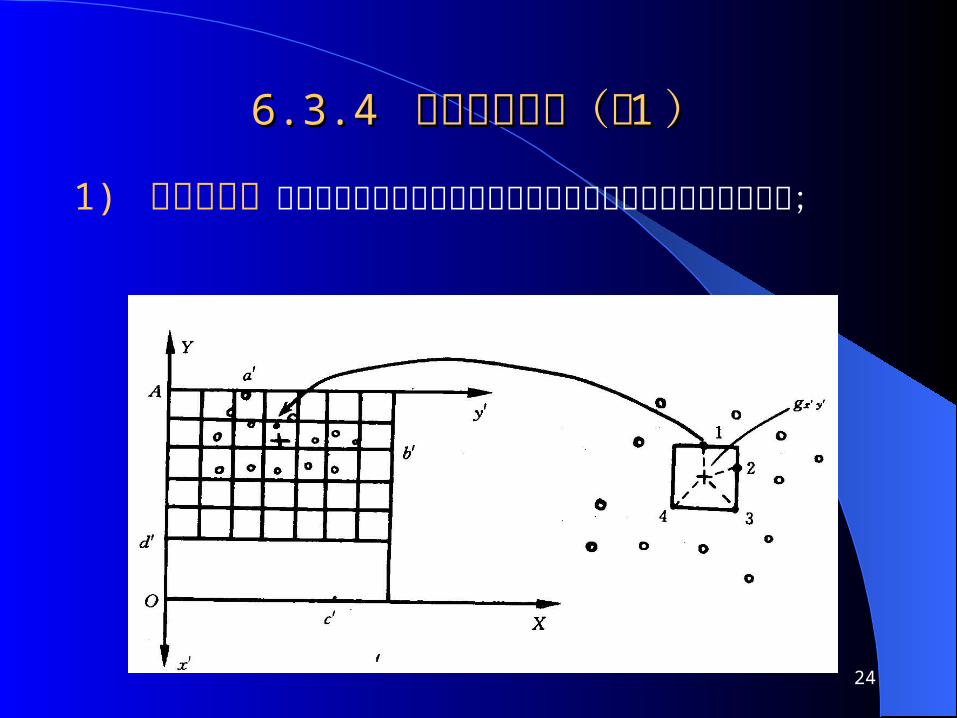
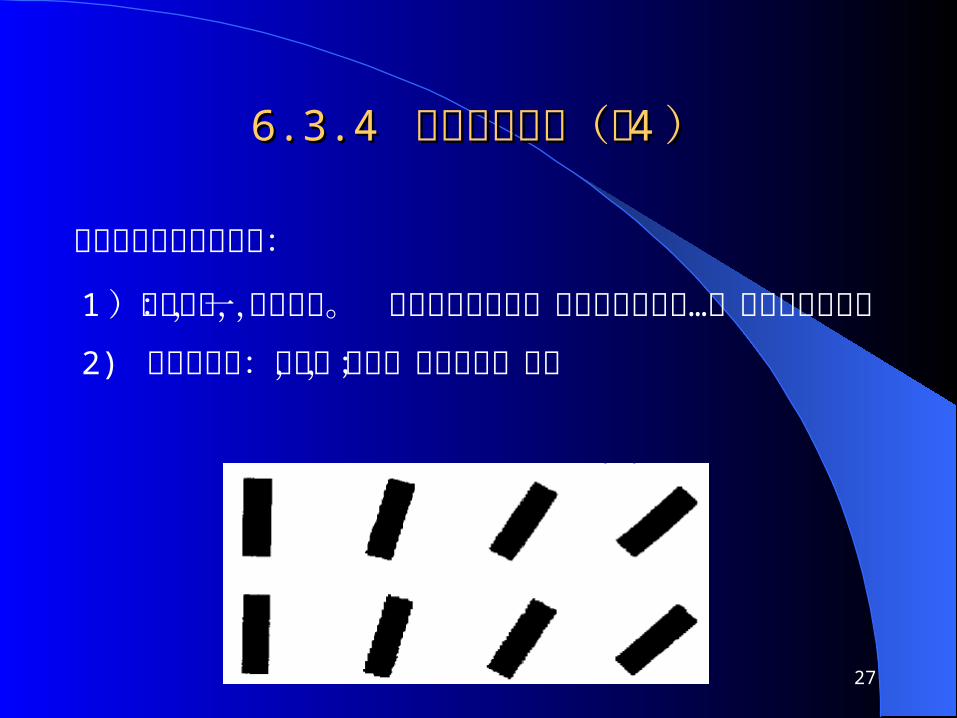
6.3.4 6.3.4 灰度的重采样(续灰度的重采样(续 11 ))1) 最近邻法:距离实际位置最近的像元的灰度值作为输出图像像元的灰度值;
25
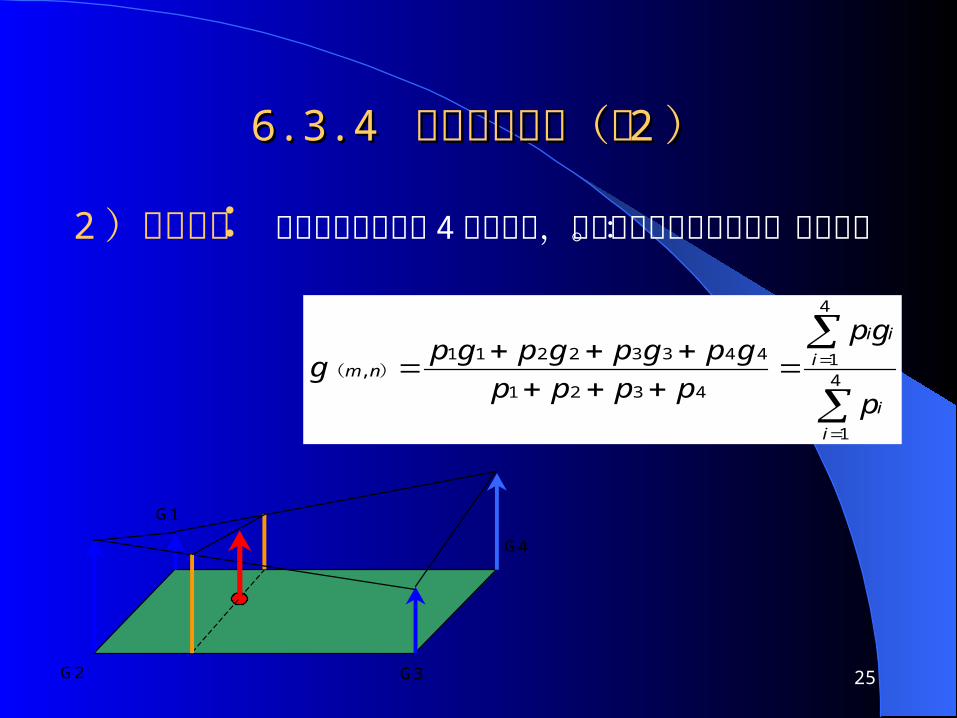
6.3.4 6.3.4 灰度的重采样(续灰度的重采样(续 22))2 )双线性法:以实际位置临近的 4 个像元值,确定输出像元的灰度值。公式为:
4
1
4
1
4321
44332211,
i
i
i
ii
nm
p
gp
ppppgpgpgpgpg )(
G2 G3
G4
G1
26
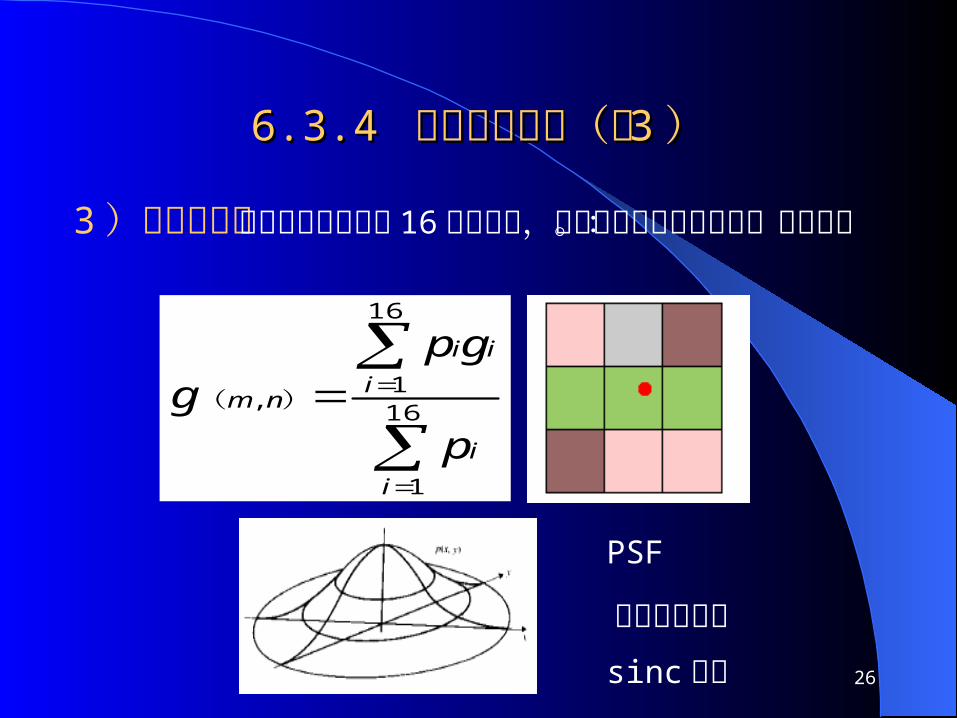
6.3.4 6.3.4 灰度的重采样(续灰度的重采样(续 33))3)三次卷积法以实际位置临近的 16 个像元值,确定输出像元的灰度值。公式为:
16
1
16
1,
i
i
i
ii
nm
p
gpg )(
PSF
三次样条函数 sinc 函数
27
6.3.4 6.3.4 灰度的重采样(续灰度的重采样(续 44))几种采样方法的优缺点:1 )最近邻法:计算简单,一般情况下可接受,灰度级细微变化…,保留原始数据。2) 双线性插值:计算,效果,细节丧失;斜率
28
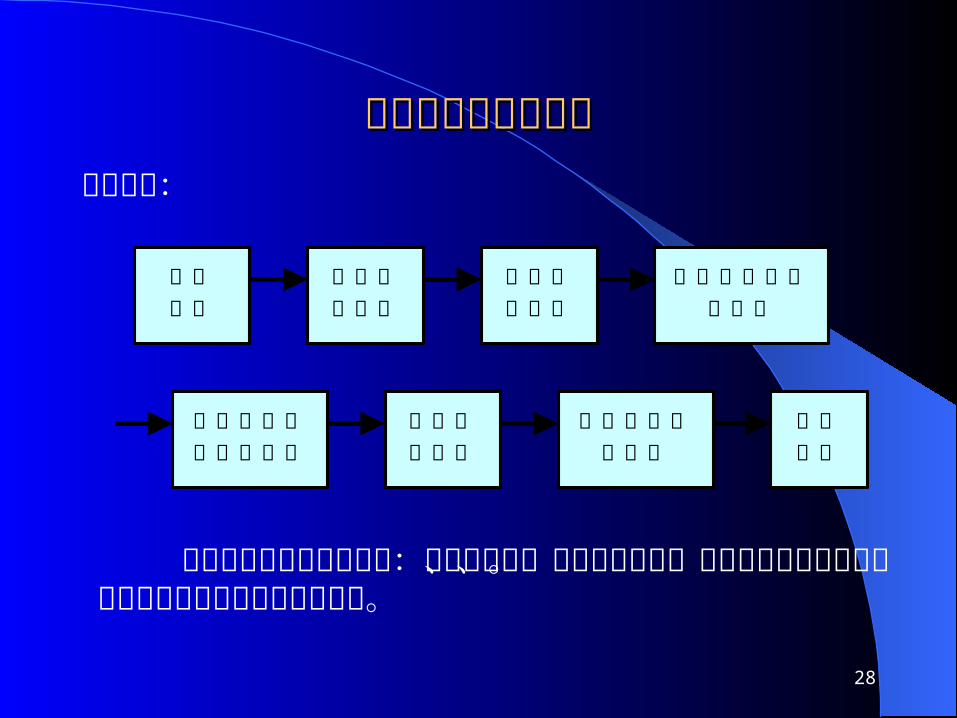
数字图像的纠正过程数字图像的纠正过程总上所述:
纠正的函数可有多种选择:多项式方法、共线方程方法、随机场内插方法等等。其中多项式方法的应用最为普遍。
准备 工作
输入原始图象
建立纠正函数
确定输出图象的范围
逐个像元进行几何变化
灰度的重采样
输出纠正后的图象
效果 评价
29
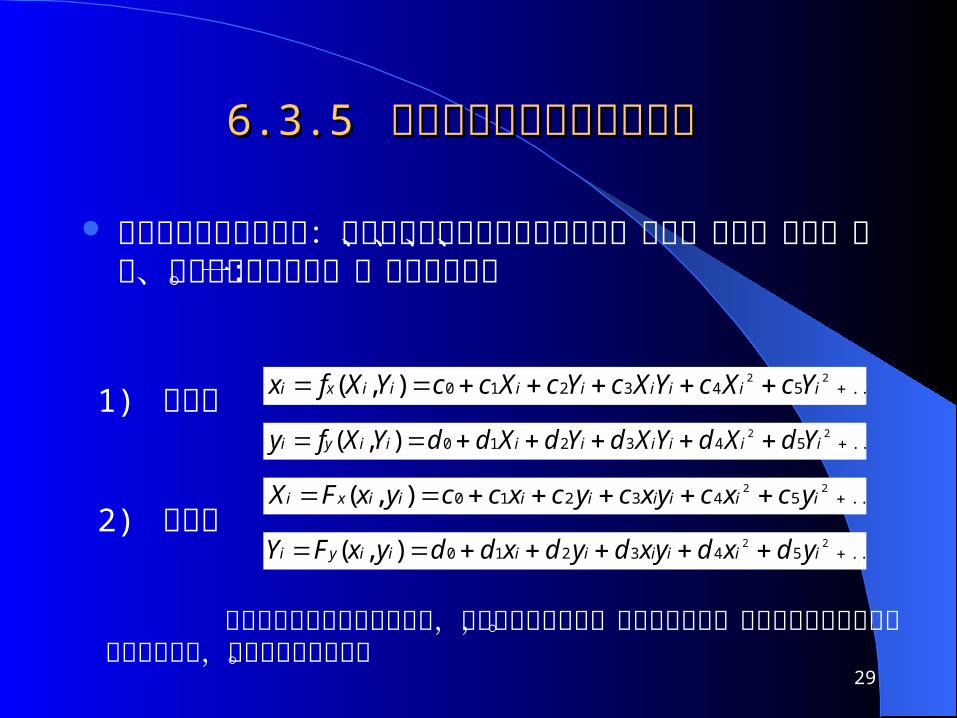
6.3.5 6.3.5 遥感数字图像的多项式纠正遥感数字图像的多项式纠正 多项式纠正的基本思想:图像的变性规律可以看作是平移、缩放、旋转、仿射、偏扭、弯曲等形变的合成。一般的公式为:
...54321022),( iiiiiiiixi YcXcYXcYcXccYXfx
...54321022),( iiiiiiiiyi YdXdYXdYdXddYXfy
...54321022),( iiiiiiiixi ycxcyxcycxccyxFX
...54321022),( iiiiiiiiyi ydxdyxdydxddyxFY
2) 直接法
1) 间接法
利用有限的控制点的已知坐标,解求多项式的系数,确定变换函数。然后将各个像元带入多项式进行计算,得到纠正后的坐标。
30
1) 表征空间位置的可靠性,道路交叉点,标志物,水域的边界,山顶,小岛中心,机场等。• 同名控制点要在图像上均匀分布;• 清楚辨认;• 数量应当超过多项式系数的个数( (n+1)*(n+2)/2 )。当控制点的个数超过多项式的系数个数时,采用最小 2乘法进行系数的确定,使得到的系数最佳。
6.3.5 6.3.5 遥感数字图像的多项式纠正遥感数字图像的多项式纠正 (续1 )
控制点的选择原则 :
ENVI: > (degree + 1)^2
31
6.3.6 6.3.6 最小二乘法最小二乘法 最小二乘法最早称为回归分析法。由著名的英国生物学家、统计学家道尔顿( F.Gallton)所创。 ( 道尔顿研究英国男子中父亲们的身高与儿子们的身高之间的关系时,创立了回归分析法。 )
探索变量之间关系最重要的方法,用以找出变量之间关系的具体表现形式。 后来,回归分析法从其方法的数学原理——误差平方和最小(二乘是平方的意思)出发,改称为最小二乘法。
32
6.3.6 6.3.6 最小二乘法(续最小二乘法(续 11 )) 1. 为了精确地描述 Y与 X之间的关系,必须使用这两个变量的所有观察值,才不至于以“点”概面(作到同步与全面)。 2 . Y与 X之间是否是直线关系(用协方差或相关系数衡量)?若是,将用一条直线描述它们之间的关系。 3 .在 Y与 X的散点图上画出直线的方法很多。 任务?——找出一条能够最好地描述 Y与 X(代表所有点)之间关系的直线。 4 .什么是最好?—找出判断“最好”的原则。 最好指的是找这么一条直线,使得所有点到该直线的纵向距离的和(平方和)最小。 5 .三种距离
33
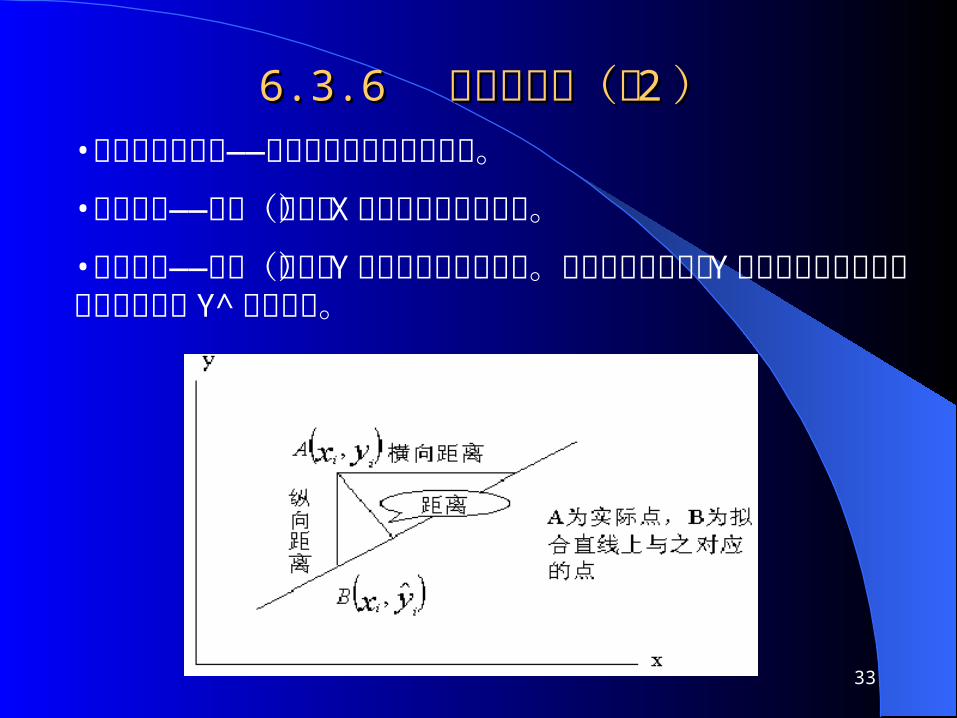
•点到直线的距离——点到直线的垂直线的长度。•横向距离——点沿(平行) X轴方向到直线的距离。•纵向距离——点沿(平行) Y轴方向到直线的距离。也就是实际观点的 Y坐标减去根据直线方程计算出来的 Y^的拟合值。
6.3.6 6.3.6 最小二乘法(续最小二乘法(续 22 ))
34
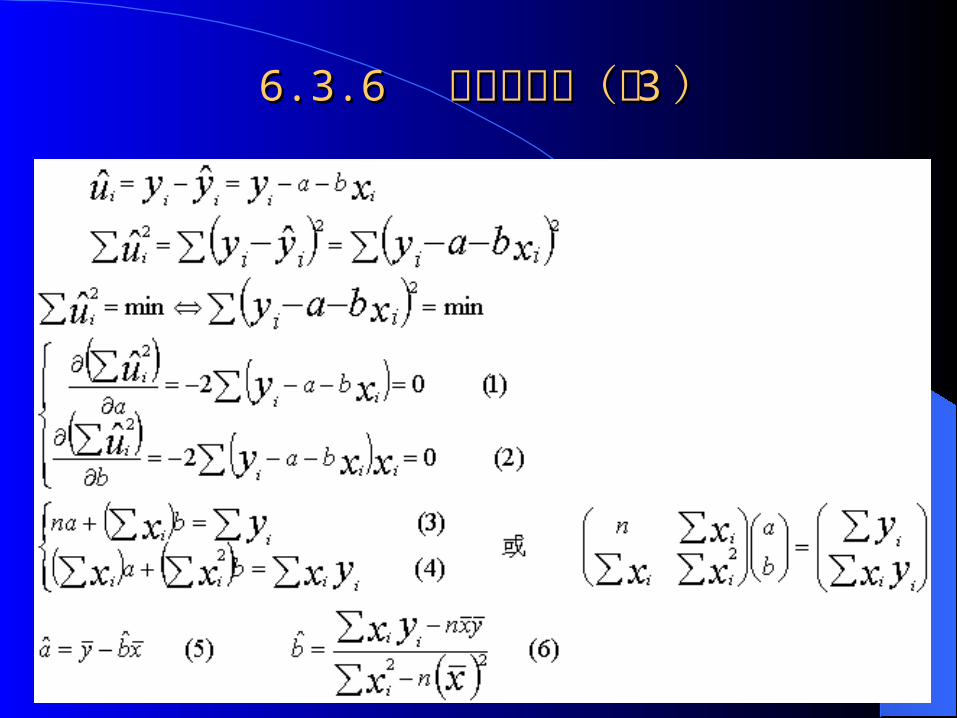
纵向距离是 Y的实际值与拟合值之差,差异大拟合不好,差异小拟合好。 将所有纵向距离平方后相加,即得误差平方和。所以,“最好”直线就是使误差平方和最小的直线。运用求极值的原理,将求最好拟合直线问题转换为求误差平方和最小的问题。
6.3.6 6.3.6 最小二乘法(续最小二乘法(续 33 ))
35
6.3.6 6.3.6 最小二乘法(续最小二乘法(续 33 ))
36
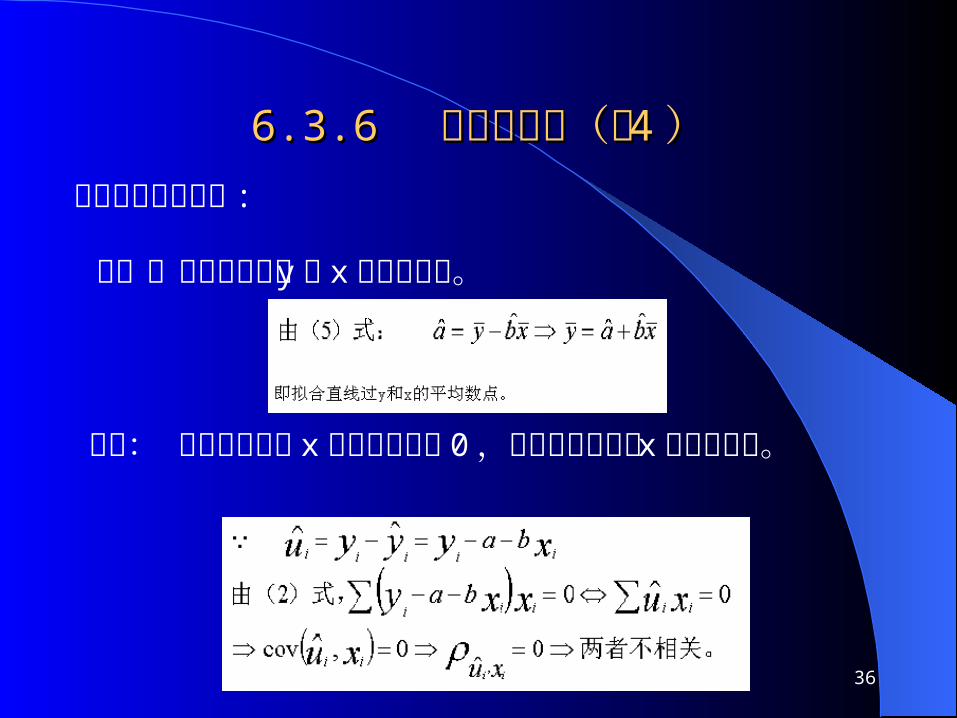
6.3.6 6.3.6 最小二乘法(续最小二乘法(续 44 ))最小二乘法的性质 :
之一:即拟合直线过 y 和 x 的平均数点。
之二: 残差与自变量 x 的乘积和等于 0 ,即残差与自变量 x两者不相关。
37
6.4 6.4 软件实习软件实习6.3.1 图像到图像的几何纠正(配准)6.3.2 图像的拚接 (图像的镶嵌 )
38
6.3.1 6.3.1 图像到图像的几何纠正(配准)图像到图像的几何纠正(配准)预备知识:打开两个图像文件,其中: BASE IMAGE : 输出图像的参照图像。 WARP IMAGE :原始图像,要被纠正的图像 GCP: Ground Control Points,
文件类型为 *.pts
39
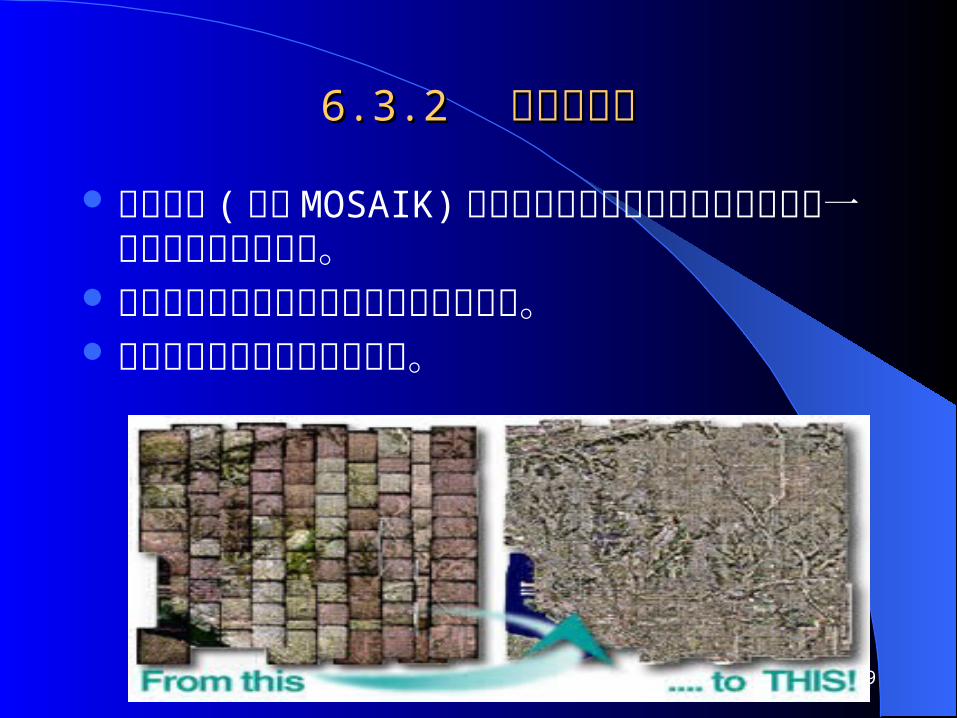
6.3.2 6.3.2 图像的拚接图像的拚接 图像拚接 ( 镶嵌MOSAIK)是将多个具有重叠部分的图像制作成一个没有重叠的新图像。有基于像元的拚接和基于地理坐标的拚接。 本节介绍基于像元的图像拚接。
40
准备工作: 1 ) 要参加拚接的图像必须具有统一的坐标系,即首先进行图像的几何纠正。 2 ) 图像灰度的调整; 对于彩色图像,需要从红绿蓝三个波段分别进行灰度的调整; 对于多波段的图像文件,进行一一对应的多个波段的灰度调整。 灰度调整的方法:进行交互式的图像拉伸,进行图像直方图的规定化 (匹配 ) ,或者进行更加复杂的类似变化(如线性回归)。
6.3.2 6.3.2 图像的拚接(续图像的拚接(续 11 ))
41
确定输出图像的大小; 确定参加图像拚接的方法;有无羽化( Feather
ing )。 参加拚接的图像如没有羽化,则用上面的图像灰度值直接替代重复部分的灰度值; 如果有羽化,则重复部分的灰度值由两个图像的灰度值确定。羽化方法:一是边缘羽化,二是用户自定义羽化。
6.3.2 6.3.2 图像的拚接(续图像的拚接(续 22))图像拚接的操作:
42
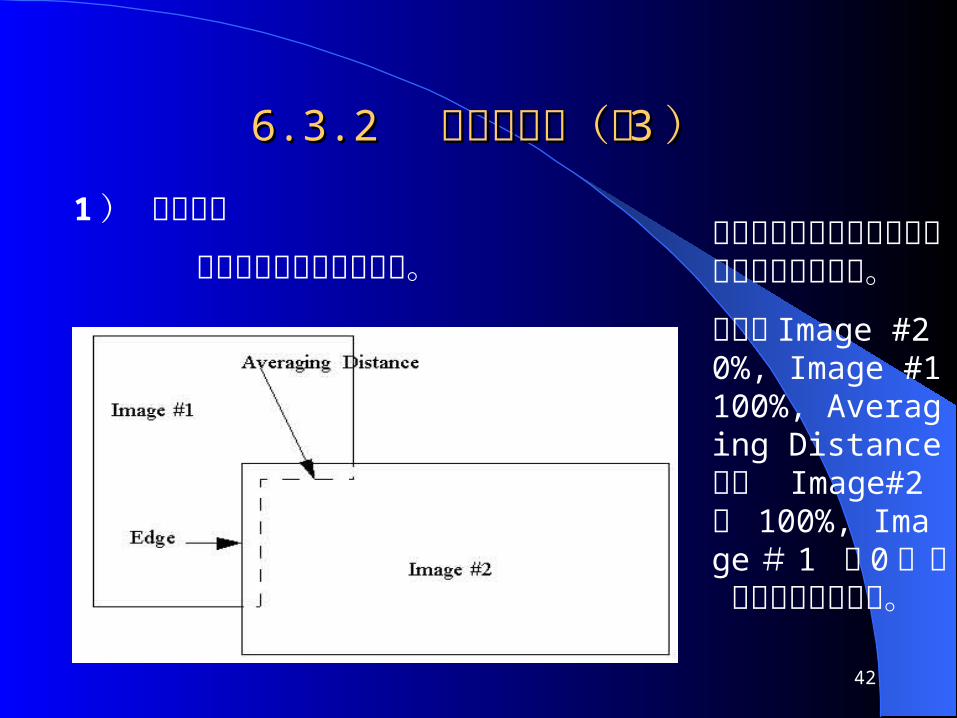
1 ) 边缘羽化 用户需要键入羽化的距离。 羽化部分的灰度值采取两个图像的线性加权值。
边缘处 Image #2 0%, Image #1 100%, Averaging Distance 处, Image#2占 100%, Image# 1 占 0%; 中间部位线性组合。
6.3.2 6.3.2 图像的拚接(续图像的拚接(续 33))
43
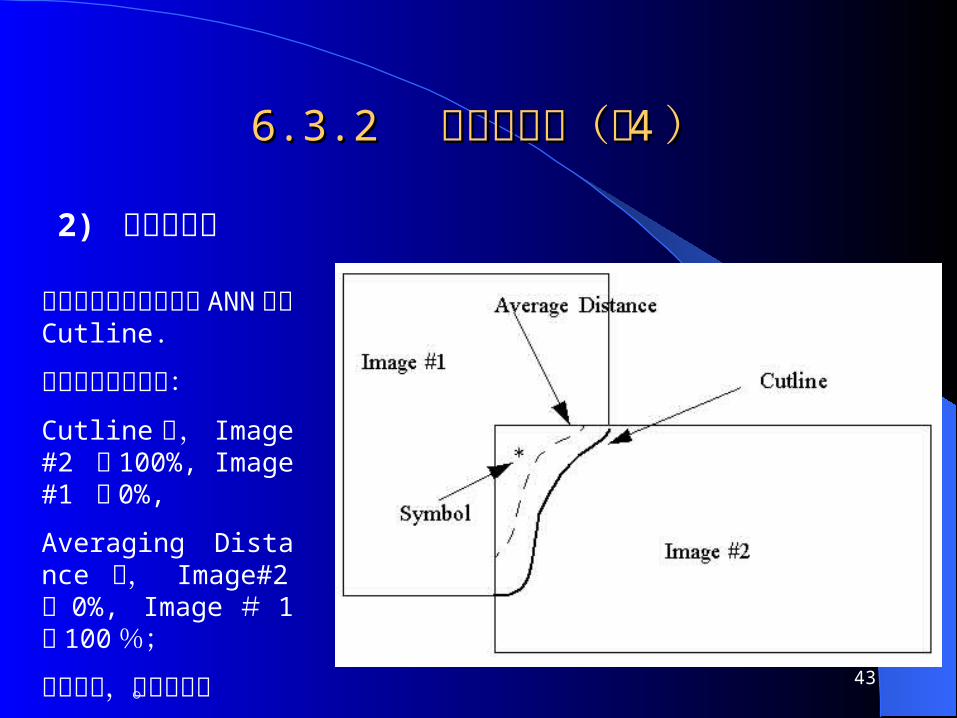
2) 自定义羽化首先必须在图像上使用 ANN定义 Cutline.
灰度值的计算方法:Cutline 处, Image #2 占 100%, Image #1 占0%,
Averaging Distance 处, Image#2 占 0%, Image # 1 占 100 %;中间地带,线性插值。
6.3.2 6.3.2 图像的拚接(续图像的拚接(续 44))
44
CUT LINE 是由一根从图像一个边缘到另一个边缘的 POLYLINE ,以及要切掉部分上的一个 SYMBOL定义的。 CUT LINE 的定义步骤为:1) 打开 IMAGE 窗口上的菜单命令 Fuctions—Overlays—Annotation ,则打开 Annotation窗口;2) 选择要在那个图像窗口上画 ANN, IMAGE? SCROLL? ZOOM?
3) 在窗口上,选择菜单命令 Object—Polyline ;4) 使用鼠标画线,按右键后画线停止,出现一个 handle , 鼠标在 h
andle 上时候,按下左键可以拖动 Ployline ,按下鼠标中键则删除该 Ployline 。画线的过程中,按下中键则删除上一个节点。再点击右键则确定所画的线。 注意:确保所画的线跨越图像的边缘。
6.3.2 6.3.2 图像的拚接(续图像的拚接(续 55))
45
直方图匹配后,分别存盘为 6 个单独的文件,再在 DOS 下运行如下命令,将 6 个文件拷贝成一个文件,重新打开后再进行拚接。DOS 命令: copy /b 1.img /b + 2.img /b + 3.img /b whole.img
6.3.2 6.3.2 图像的拚接(续图像的拚接(续 66))