Embed Size (px)
DESCRIPTION
6.Controlador Del Motor
Citation preview
Proyecto fin de carrera Juan Antonio Muñoz Japón
82
6. Controlador del Motor
Proyecto fin de carrera Juan Antonio Muñoz Japón
83
6.1 Introducción:
El controlador es el dispositivo encargado de controlar el motor, dependiendo de las señales
que le llegan a través del programador de mano y las señales provenientes del propio motor,
así como de las señales activadas en un circuito. Según las señales que recibe toma la decisión
adecuada para controlar el motor variando la corriente que le manda a éste.
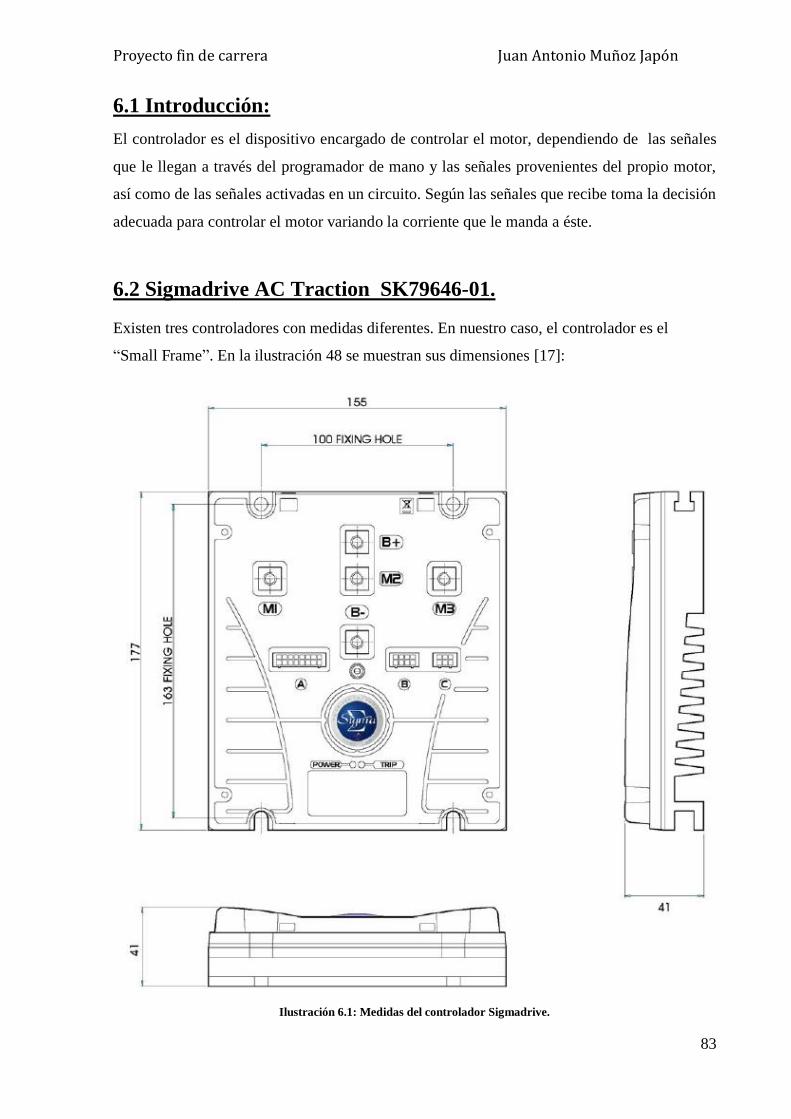
6.2 Sigmadrive AC Traction SK79646-01.
Existen tres controladores con medidas diferentes. En nuestro caso, el controlador es el
“Small Frame”. En la ilustración 48 se muestran sus dimensiones [17]:
Ilustración 6.1: Medidas del controlador Sigmadrive.
Proyecto fin de carrera Juan Antonio Muñoz Japón
84
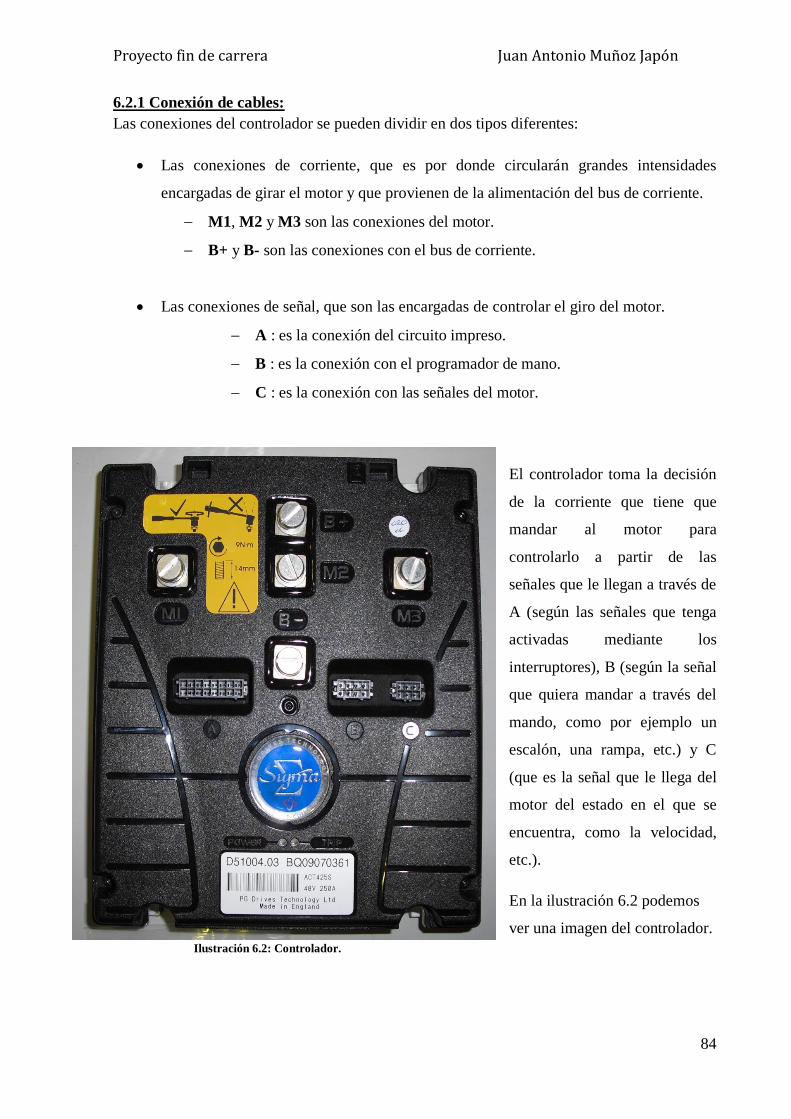
6.2.1 Conexión de cables:
Las conexiones del controlador se pueden dividir en dos tipos diferentes:
Las conexiones de corriente, que es por donde circularán grandes intensidades
encargadas de girar el motor y que provienen de la alimentación del bus de corriente.
M1, M2 y M3 son las conexiones del motor.
B+ y B- son las conexiones con el bus de corriente.
Las conexiones de señal, que son las encargadas de controlar el giro del motor.
A : es la conexión del circuito impreso.
B : es la conexión con el programador de mano.
C : es la conexión con las señales del motor.
El controlador toma la decisión
de la corriente que tiene que
mandar al motor para
controlarlo a partir de las
señales que le llegan a través de
A (según las señales que tenga
activadas mediante los
interruptores), B (según la señal
que quiera mandar a través del
mando, como por ejemplo un
escalón, una rampa, etc.) y C
(que es la señal que le llega del
motor del estado en el que se
encuentra, como la velocidad,
etc.).
En la ilustración 6.2 podemos
ver una imagen del controlador.
Ilustración 6.2: Controlador.
Proyecto fin de carrera Juan Antonio Muñoz Japón
85
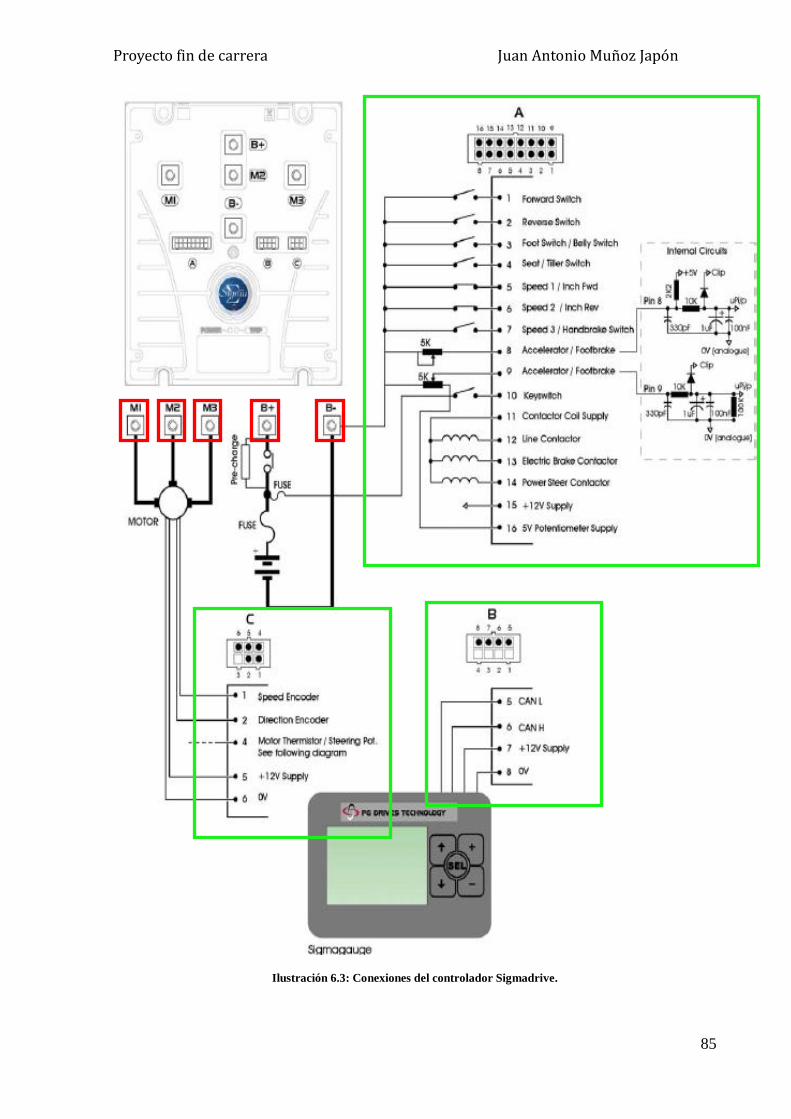
Ilustración 6.3: Conexiones del controlador Sigmadrive.
Proyecto fin de carrera Juan Antonio Muñoz Japón
86
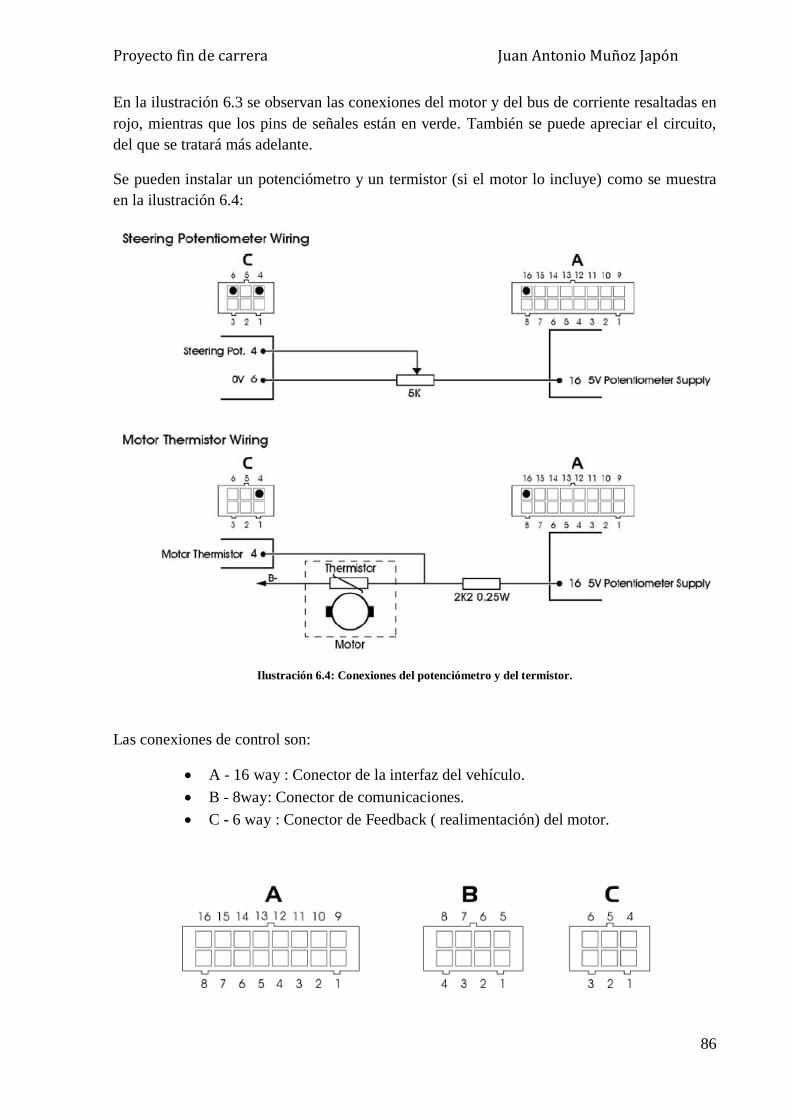
En la ilustración 6.3 se observan las conexiones del motor y del bus de corriente resaltadas en
rojo, mientras que los pins de señales están en verde. También se puede apreciar el circuito,
del que se tratará más adelante.
Se pueden instalar un potenciómetro y un termistor (si el motor lo incluye) como se muestra
en la ilustración 6.4:
Ilustración 6.4: Conexiones del potenciómetro y del termistor.
Las conexiones de control son:
A - 16 way : Conector de la interfaz del vehículo.
B - 8way: Conector de comunicaciones.
C - 6 way : Conector de Feedback ( realimentación) del motor.
Proyecto fin de carrera Juan Antonio Muñoz Japón
87
Conector A: Interfaz del vehículo. Las señales le provienen del circuito impreso.
Pin 1- Interruptor Adelante: Este interruptor tiene que estar cerrado en combinación
con el acelerador para poder mandar la señal de andar hacia adelante al motor.
Pin 2- Interruptor Marcha Atrás: Este interruptor tiene que estar cerrado en
combinación con el acelerador para poder mandar la señal de marcha atrás al motor.
Pin 3- Pedal: La función de esta entrada está fijada por el parámetro programable 3.8
(Tipo de pista seleccionada). Si se establece en paseo, el pedal del acelerador tiene que
estar conectado a este pin y el interruptor cerrado. Si se establece en andar, el pedal del
vehículo tendría que conectarse a este pin. Cuando el interruptor del pedal del vehículo
se cierra, el coche andará en dirección opuesta durante 1,5 s.
Pin 4- “Seat/Tiller”: La función de esta entrada es proporcionar un interruptor de
seguridad general. Debe estar cerrado para que funcione el motor.
Pin 5- Límite de velocidad 1/ Marcha lenta: La función de esta entrada es fijada por
el parámetro programable 3.5 Conector A, Pin 5 y 6.
Si se establece en límite de velocidad 1, esta entrada se puede utilizar para limitar la
velocidad del vehículo a un valor fijado por el parámetro programable 1.6 (Límite de
velocidad 1). El límite de velocidad se producirá cuando el interruptor está abierto.
Si se establece en marcha lenta, esta entrada se utiliza para que el vehículo avance
poco a poco. La marcha lenta se produce cuando el interruptor está cerrado. La
funcionalidad exacta de la marcha lenta es fijada por los parámetros programables 1.6
(de velocidad de marcha lenta) y 1,7 (tiempo de marcha lenta).
Pin 6- Límite de velocidad 2/ Marcha atrás lenta: La función de esta entrada es
fijada por el parámetro programable 3.5 Conector A Pin 5 y 6.
Si se establece en límite de velocidad 2, esta entrada se puede utilizar para limitar la
velocidad del vehículo a un valor fijado por el parámetro programable 1.7 (límite de
velocidad 2).
El límite de velocidad se producirá cuando el interruptor está abierto.
Proyecto fin de carrera Juan Antonio Muñoz Japón
88
Si se establece en marcha lenta, esta entrada se utiliza para mover lentamente el
vehículo en la dirección contraria. La marcha lenta se producirá cuando el interruptor
está cerrado. La funcionalidad exacta de la marcha lenta es fijada por los parámetros
programables 1.6 (de velocidad de marcha lenta) y 1,7 (tiempo de marcha lenta).
Pin 7- Límite de velocidad 3/ Freno de mano: Esta entrada está pensada
principalmente para ser utilizada con un interruptor de freno de mano, sin embargo,
su función se puede ajustar por la programación en el parámetro 3.6 del conector
A Pin 7.
Si se establece en límite de velocidad 3, esta entrada se puede utilizar para limitar la
velocidad del vehículo a un valor fijado por el parámetro programable 1,8 (el límite de
velocidad 3). El límite de velocidad se producirá cuando el interruptor está abierto.
Si se establece en freno de mano, esta entrada debe estar conectada al interruptor de
freno de mano del vehículo. Cuando el interruptor está cerrado, es decir, el
freno de mano está activado, la velocidad del vehículo será fijada por el parámetro
programable 1.8 (Límite de velocidad 3).
Pin 8- Acelerador/Freno: Esta es una entrada analógica que aceptará un
potenciómetro 5kL de 2 conexiones o de 0 V a una señal de tensión de 5V.
La función de esta entrada es fijada por el parámetro programable 3.14 (entradas
analógicas).
Si se fija en 0, la entrada debería de estar conectada al acelerador.
Si se fija en 1, la entrada debería de estar conectada al freno.
Cuando se establece en 0, el rango activo de la entrada del acelerador está definido
por los parámetros programables 1.21 (tensión de acelerador 0%) y 1.22 (tensión del
acelerador 100%). El parámetro anterior establece el voltaje que se refiere a no
acelerar (acelerar 0%), mientras que el último parámetro establece el voltaje que se
refiere al 100% de aceleración.
Cuando se establece en 1, el rango activo de la entrada del pedal de freno está definida
por los parámetros programables 1.23 (0% de tensión del vástago) y 1,24 (100% de
tensión del vástago). El parámetro anterior establece el voltaje que se refiere a que no
había demanda de frenado desde el pedal de freno, mientras que el último
parámetro establece el voltaje que se refiere a la demanda del 100% de frenado.
Proyecto fin de carrera Juan Antonio Muñoz Japón
89
Si se utiliza un pedal de freno en lugar de un dispositivo analógico, el interruptor debe
conectarse a esta entrada a fin de efectuar un frenado.
Pin 9- Acelerador/Freno: Esta es una entrada analógica que aceptará un
potenciómetro 5kL de 3 conexiones o de 0 V a una señal de tensión de 5V.
La función de esta entrada es fijada por el parámetro programable 3.14 (entradas
analógicas).
Si se fija en 0, la entrada debería de estar conectada al freno.
Si se fija en 1, la entrada debería de estar conectada al acelerador.
Cuando se establece en 0, el rango activo de la entrada de pedal de freno está definida
por los parámetros programables 1.23 (0% de tensión de vástago) y 1.24 (100% de
tensión de vástago). El primer parámetro indica que no se está frenando, mientras que
el último, indicará que se está frenando al 100%.
Si se utiliza un pedal de freno en lugar de un dispositivo analógico, el interruptor debe
conectarse a esta entrada.
Cuando se establece en 1, el rango activo de la entrada del acelerador está definida
por los parámetros programables 1.21 (0% de tensión en el acelerador)
y 1.22 (100% de tensión en el acelerador). El primer parámetro indica que no se
demanda aceleración, mientras que el último indica que se demanda el 100% de
aceleración.
Pin 10- Llave: Esta entrada debe estar conectada a la parte de conmutación de la
llave. El otro lado de la llave debe estar conectado a la alimentación positiva de la
batería. Se debe de conectar un fusible entre la batería y la llave, lo más cerca a ésta.
Pin 11- Contactor de alimentación de las bobinas: Esta salida es el positivo de
alimentación a los contactores del vehículo. El nivel de tensión de esta fuente se
corresponde con la de la batería. El suministro de corriente máxima de este pin es de
3A.
Pin 12- Contactor de línea: Este pin se debe conectar al polo negativo de la bobina
del contactor de línea. El controlador Sigmadrive controlará la línea según sea
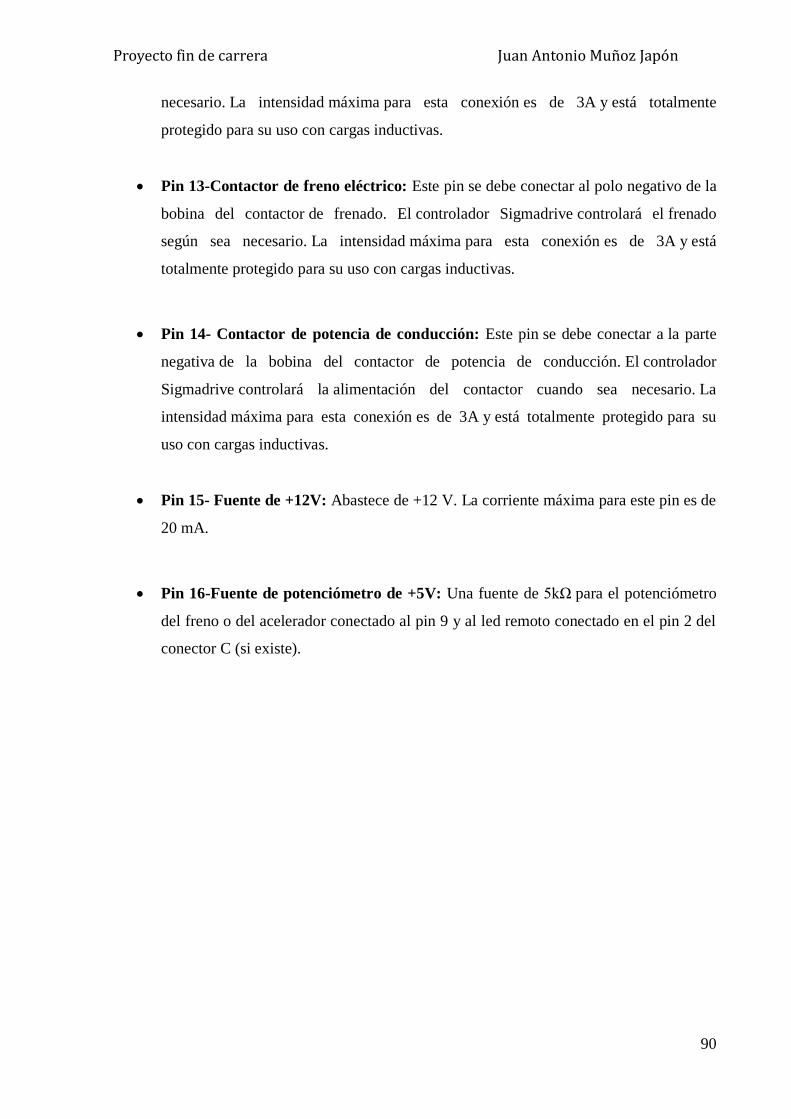
Proyecto fin de carrera Juan Antonio Muñoz Japón
90
necesario. La intensidad máxima para esta conexión es de 3A y está totalmente
protegido para su uso con cargas inductivas.
Pin 13-Contactor de freno eléctrico: Este pin se debe conectar al polo negativo de la
bobina del contactor de frenado. El controlador Sigmadrive controlará el frenado
según sea necesario. La intensidad máxima para esta conexión es de 3A y está
totalmente protegido para su uso con cargas inductivas.
Pin 14- Contactor de potencia de conducción: Este pin se debe conectar a la parte
negativa de la bobina del contactor de potencia de conducción. El controlador
Sigmadrive controlará la alimentación del contactor cuando sea necesario. La
intensidad máxima para esta conexión es de 3A y está totalmente protegido para su
uso con cargas inductivas.
Pin 15- Fuente de +12V: Abastece de +12 V. La corriente máxima para este pin es de
20 mA.
Pin 16-Fuente de potenciómetro de +5V: Una fuente de 5kΩ para el potenciómetro
del freno o del acelerador conectado al pin 9 y al led remoto conectado en el pin 2 del
conector C (si existe).
Proyecto fin de carrera Juan Antonio Muñoz Japón
91
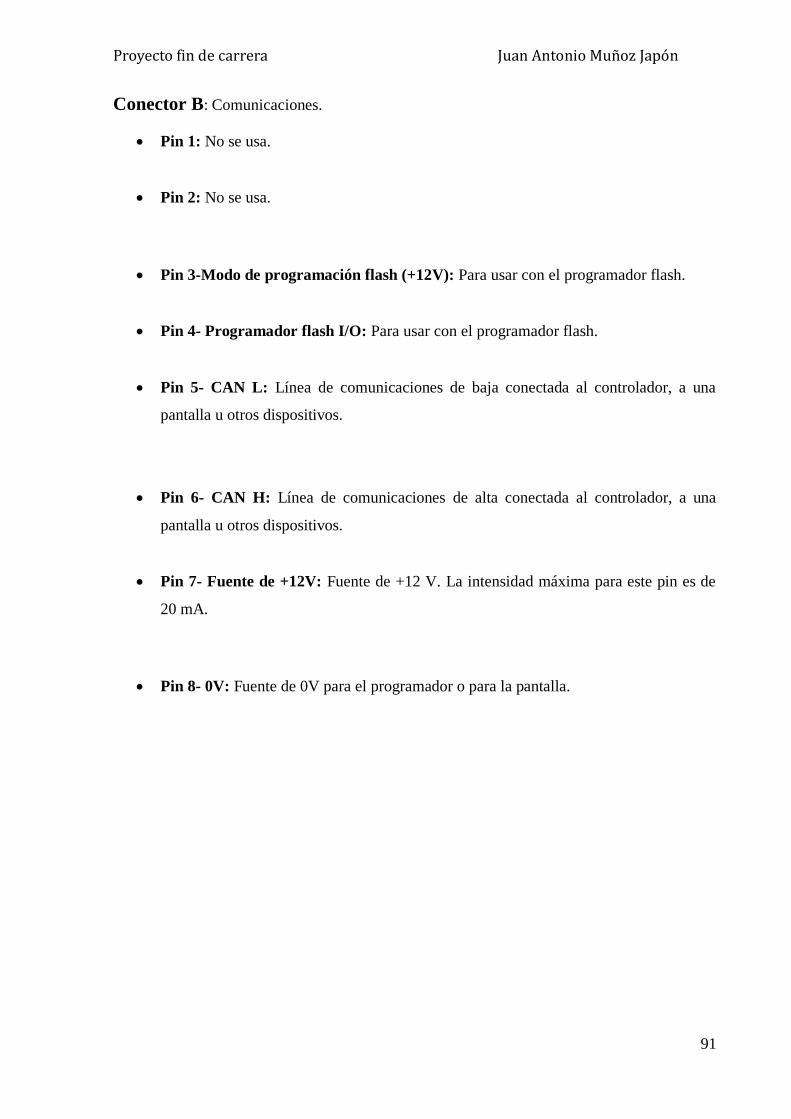
Conector B: Comunicaciones.
Pin 1: No se usa.
Pin 2: No se usa.
Pin 3-Modo de programación flash (+12V): Para usar con el programador flash.
Pin 4- Programador flash I/O: Para usar con el programador flash.
Pin 5- CAN L: Línea de comunicaciones de baja conectada al controlador, a una
pantalla u otros dispositivos.
Pin 6- CAN H: Línea de comunicaciones de alta conectada al controlador, a una
pantalla u otros dispositivos.
Pin 7- Fuente de +12V: Fuente de +12 V. La intensidad máxima para este pin es de
20 mA.
Pin 8- 0V: Fuente de 0V para el programador o para la pantalla.
Proyecto fin de carrera Juan Antonio Muñoz Japón
92
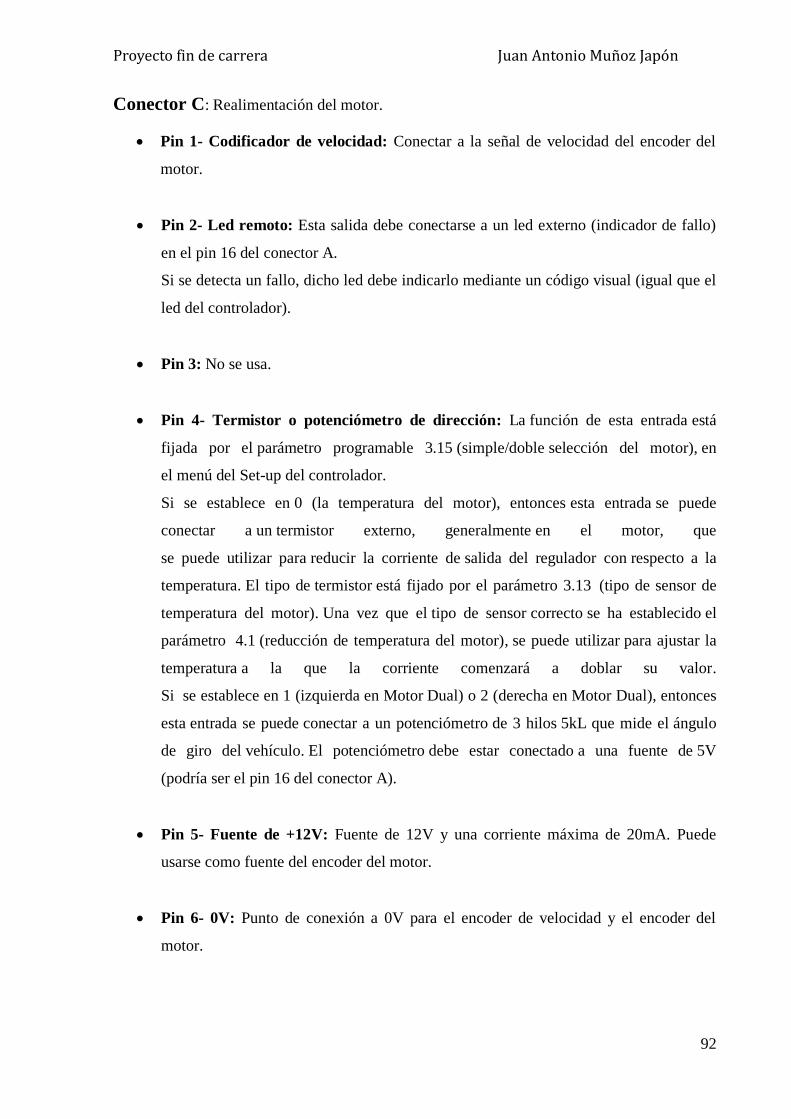
Conector C: Realimentación del motor.
Pin 1- Codificador de velocidad: Conectar a la señal de velocidad del encoder del
motor.
Pin 2- Led remoto: Esta salida debe conectarse a un led externo (indicador de fallo)
en el pin 16 del conector A.
Si se detecta un fallo, dicho led debe indicarlo mediante un código visual (igual que el
led del controlador).
Pin 3: No se usa.
Pin 4- Termistor o potenciómetro de dirección: La función de esta entrada está
fijada por el parámetro programable 3.15 (simple/doble selección del motor), en
el menú del Set-up del controlador.
Si se establece en 0 (la temperatura del motor), entonces esta entrada se puede
conectar a un termistor externo, generalmente en el motor, que
se puede utilizar para reducir la corriente de salida del regulador con respecto a la
temperatura. El tipo de termistor está fijado por el parámetro 3.13 (tipo de sensor de
temperatura del motor). Una vez que el tipo de sensor correcto se ha establecido el
parámetro 4.1 (reducción de temperatura del motor), se puede utilizar para ajustar la
temperatura a la que la corriente comenzará a doblar su valor.
Si se establece en 1 (izquierda en Motor Dual) o 2 (derecha en Motor Dual), entonces
esta entrada se puede conectar a un potenciómetro de 3 hilos 5kL que mide el ángulo
de giro del vehículo. El potenciómetro debe estar conectado a una fuente de 5V
(podría ser el pin 16 del conector A).
Pin 5- Fuente de +12V: Fuente de 12V y una corriente máxima de 20mA. Puede
usarse como fuente del encoder del motor.
Pin 6- 0V: Punto de conexión a 0V para el encoder de velocidad y el encoder del
motor.

Proyecto fin de carrera Juan Antonio Muñoz Japón
93
6.3 Programador de mano:
El programador de mano es el elemento con el que podemos mandar las señales que queremos
al controlador para que éste ajuste el motor a los parámetros enviados. El programador
presenta una pantalla en la que se puede visualizar un menú con las opciones disponibles, así
como unos botones con los que poder movernos a través del menú y para hacer la selección
del parámetro deseado. En la ilustración 6.5 se muestra la imagen de nuestro programador de
mano:
Ilustración 6.5: Programador de mano.
El programador trae un selector de modo (véase ilustración 6.6), en el que según su posición,
se puede usar para programar la acción deseada o para actualizar el software.
Ilustración 6.6: Selector de modo del programador de mano.
Proyecto fin de carrera Juan Antonio Muñoz Japón
94
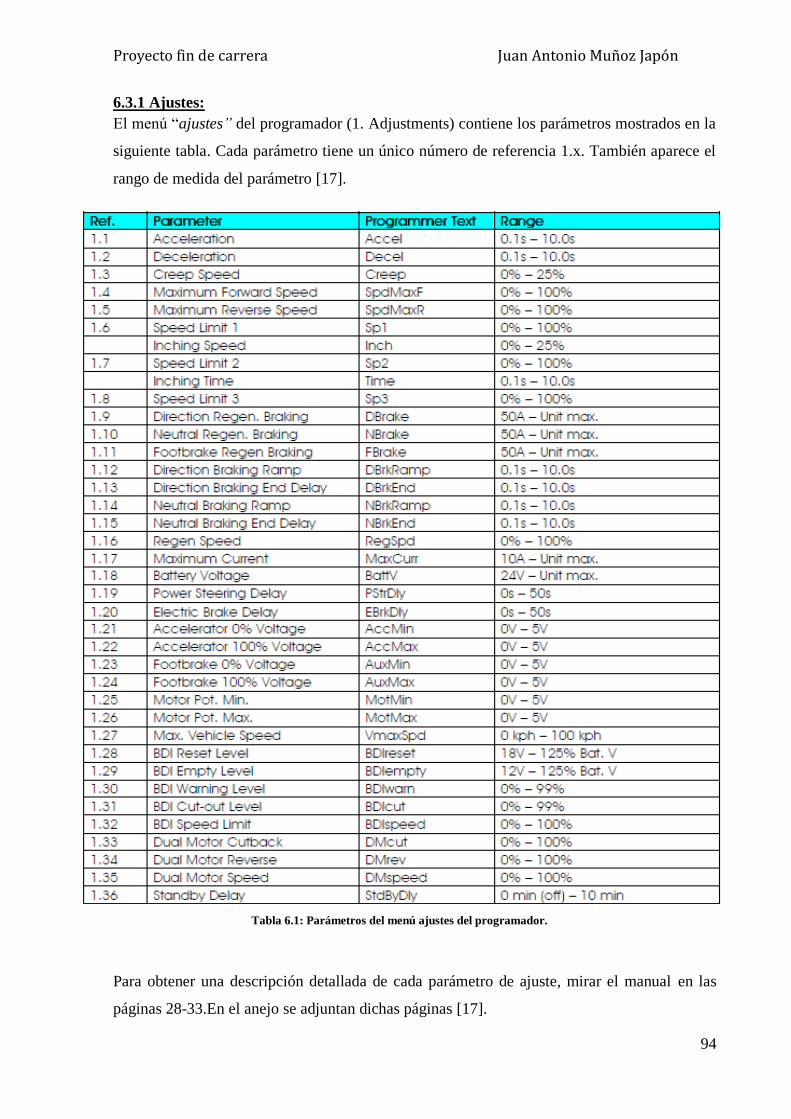
6.3.1 Ajustes:
El menú “ajustes” del programador (1. Adjustments) contiene los parámetros mostrados en la
siguiente tabla. Cada parámetro tiene un único número de referencia 1.x. También aparece el
rango de medida del parámetro [17].
Para obtener una descripción detallada de cada parámetro de ajuste, mirar el manual en las
páginas 28-33.En el anejo se adjuntan dichas páginas [17].
Tabla 6.1: Parámetros del menú ajustes del programador.
Proyecto fin de carrera Juan Antonio Muñoz Japón
95
6.3.2 Códigos de errores:
Cuando el controlador detecta un error, el usuario puede identificarlo por varias vías distintas.
El led del controlador parpadeará y el número de veces que parpadee indicará la secuencia.
El led externo también parpadeará de forma sincronizada con el del controlador.
Otra forma de detectar el error es a través del programador de mano, en el que se indicará el
código del error precedido por una “F”. Un ejemplo se puede ver en la ilustración 6.7:
Ilustración 6.7: Detección del error a través del programador de mano.
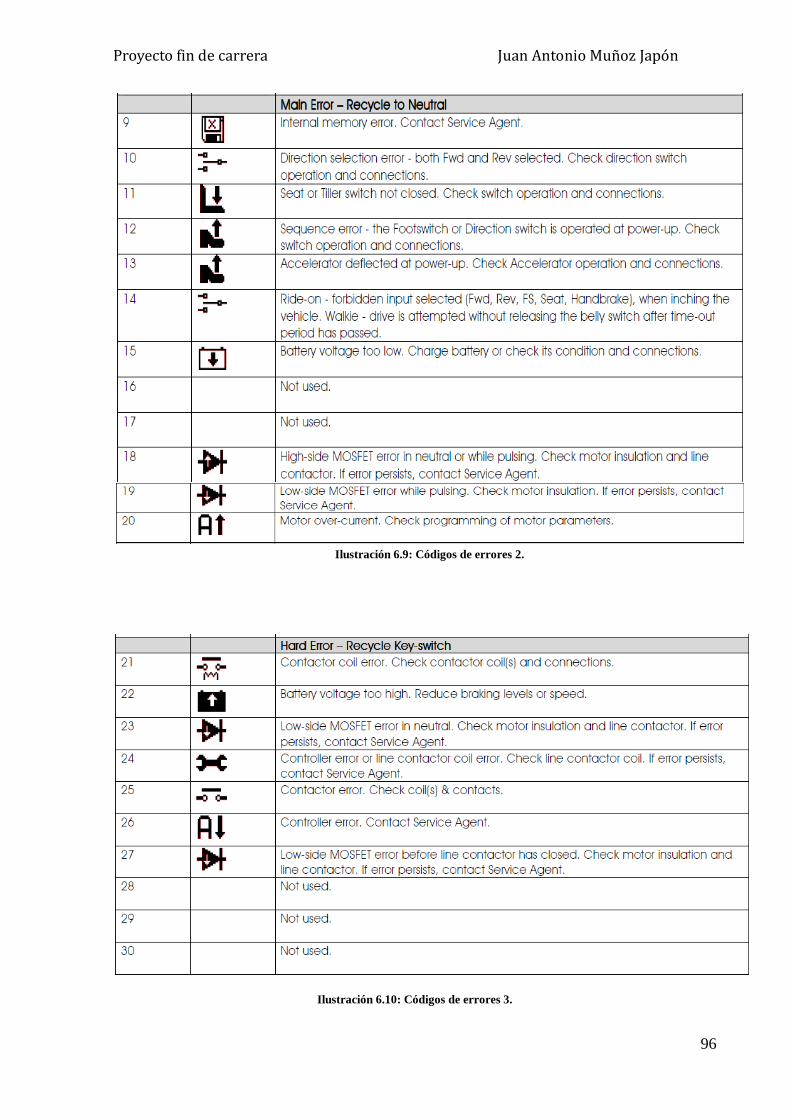
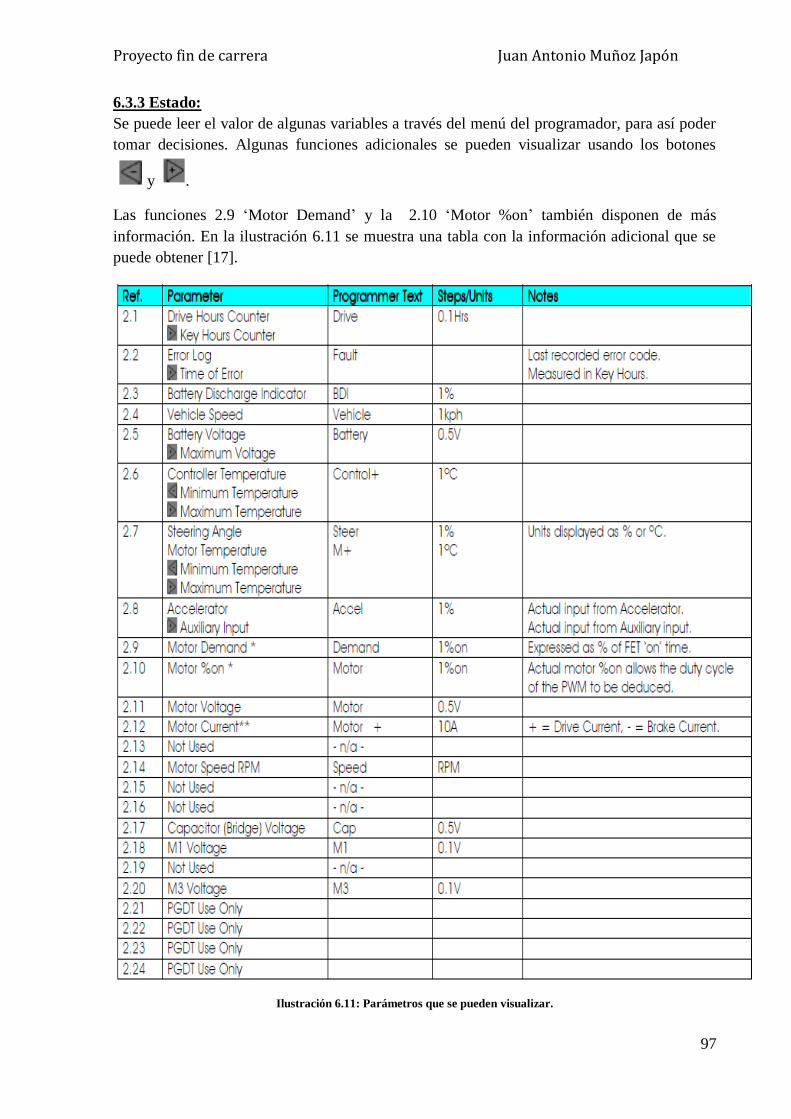
Si dispusiéramos de un “Sigmagauge”, podríamos visualizar el error mediante un icono.
Los códigos de errores se muestran en las ilustraciones 6.8, 6.9 y 6.10 [17]:
Ilustración 6.8: Códigos de errores 1.
Proyecto fin de carrera Juan Antonio Muñoz Japón
96
Ilustración 6.10: Códigos de errores 3.
Ilustración 6.9: Códigos de errores 2.
Proyecto fin de carrera Juan Antonio Muñoz Japón
97
6.3.3 Estado:
Se puede leer el valor de algunas variables a través del menú del programador, para así poder
tomar decisiones. Algunas funciones adicionales se pueden visualizar usando los botones
y .
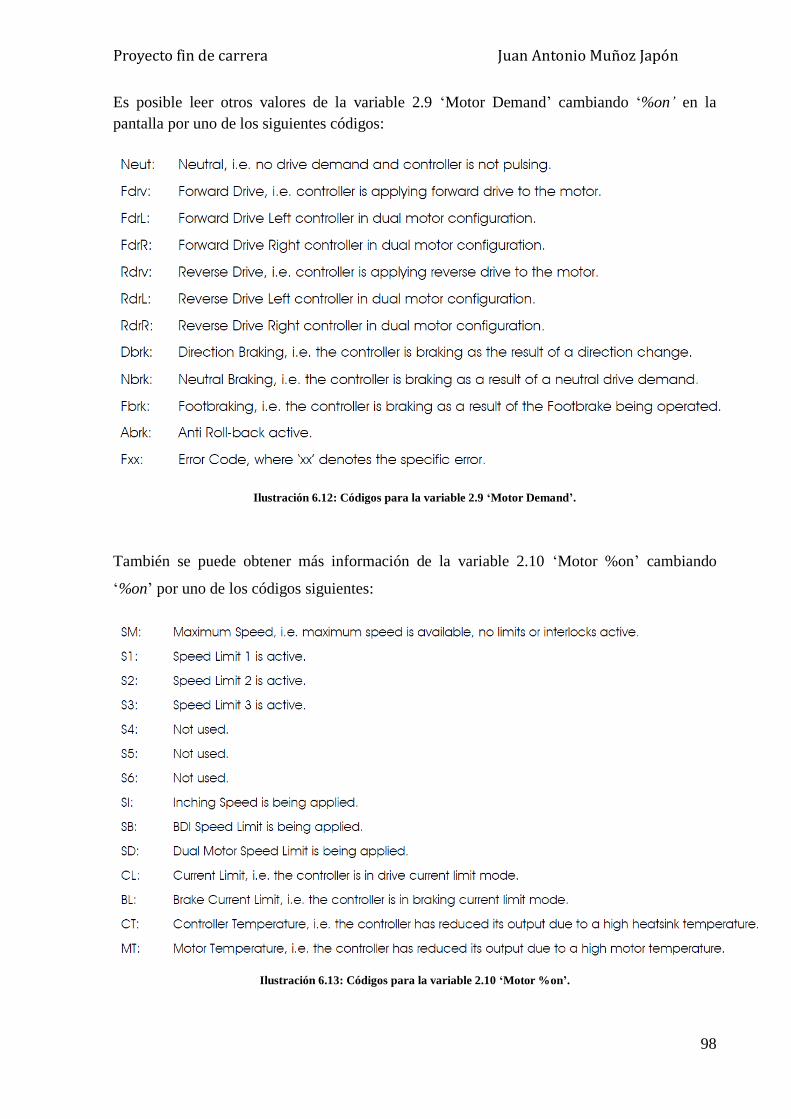
Las funciones 2.9 „Motor Demand‟ y la 2.10 „Motor %on‟ también disponen de más
información. En la ilustración 6.11 se muestra una tabla con la información adicional que se
puede obtener [17].
Ilustración 6.11: Parámetros que se pueden visualizar.
Proyecto fin de carrera Juan Antonio Muñoz Japón
98
Es posible leer otros valores de la variable 2.9 „Motor Demand‟ cambiando „%on’ en la
pantalla por uno de los siguientes códigos:
Ilustración 6.12: Códigos para la variable 2.9 „Motor Demand‟.
También se puede obtener más información de la variable 2.10 „Motor %on‟ cambiando
„%on‟ por uno de los códigos siguientes:
Ilustración 6.13: Códigos para la variable 2.10 „Motor %on‟.
Proyecto fin de carrera Juan Antonio Muñoz Japón
99
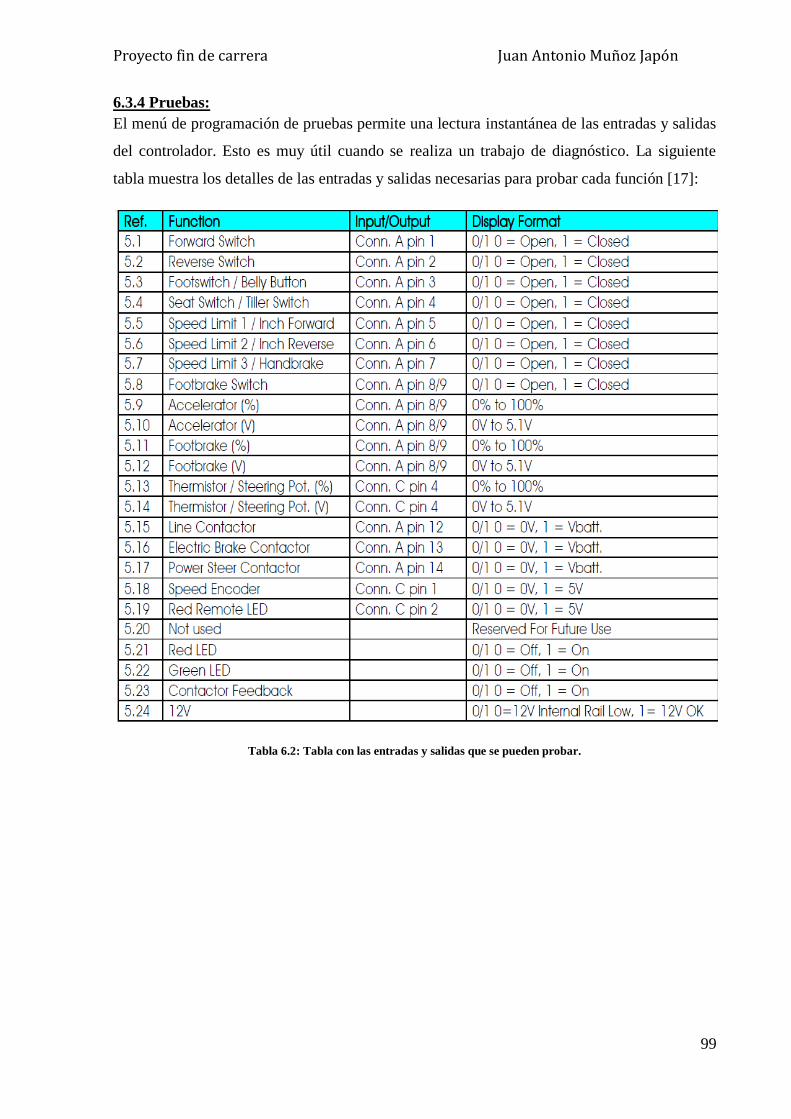
6.3.4 Pruebas:
El menú de programación de pruebas permite una lectura instantánea de las entradas y salidas
del controlador. Esto es muy útil cuando se realiza un trabajo de diagnóstico. La siguiente
tabla muestra los detalles de las entradas y salidas necesarias para probar cada función [17]:
Tabla 6.2: Tabla con las entradas y salidas que se pueden probar.
Proyecto fin de carrera Juan Antonio Muñoz Japón
100
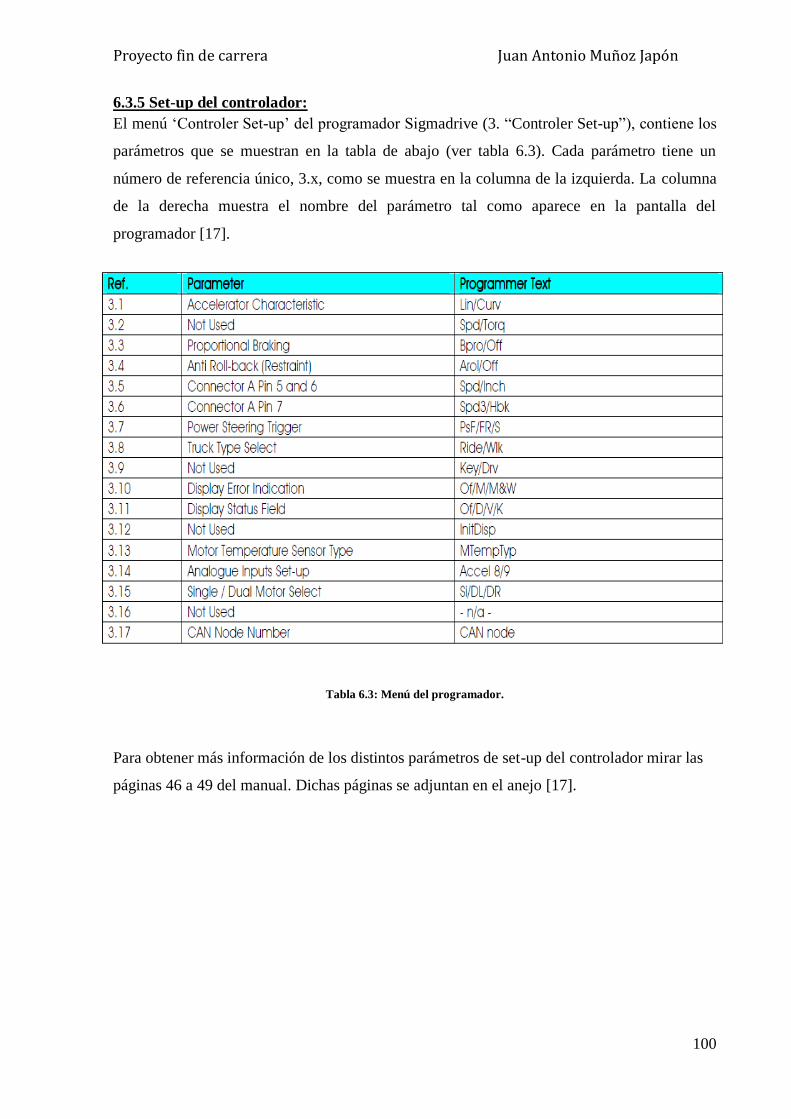
6.3.5 Set-up del controlador:
El menú „Controler Set-up‟ del programador Sigmadrive (3. “Controler Set-up”), contiene los
parámetros que se muestran en la tabla de abajo (ver tabla 6.3). Cada parámetro tiene un
número de referencia único, 3.x, como se muestra en la columna de la izquierda. La columna
de la derecha muestra el nombre del parámetro tal como aparece en la pantalla del
programador [17].
Tabla 6.3: Menú del programador.
Para obtener más información de los distintos parámetros de set-up del controlador mirar las
páginas 46 a 49 del manual. Dichas páginas se adjuntan en el anejo [17].
Proyecto fin de carrera Juan Antonio Muñoz Japón
101
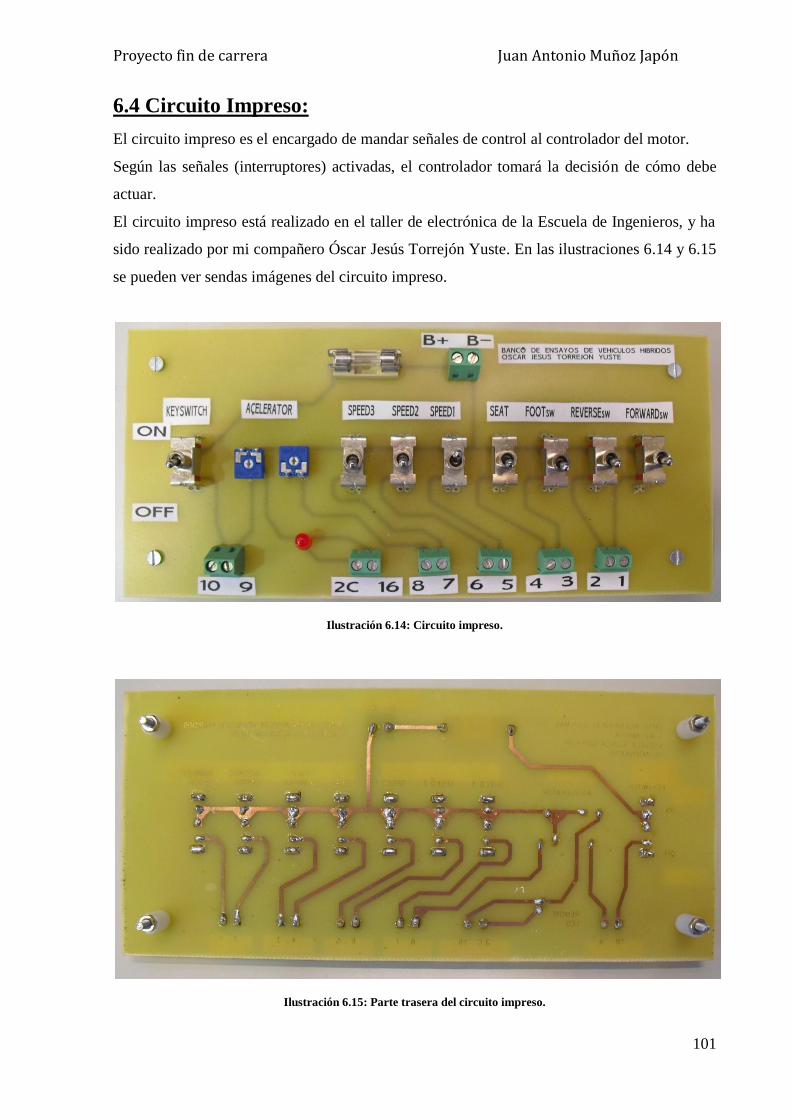
6.4 Circuito Impreso:
El circuito impreso es el encargado de mandar señales de control al controlador del motor.
Según las señales (interruptores) activadas, el controlador tomará la decisión de cómo debe
actuar.
El circuito impreso está realizado en el taller de electrónica de la Escuela de Ingenieros, y ha
sido realizado por mi compañero Óscar Jesús Torrejón Yuste. En las ilustraciones 6.14 y 6.15
se pueden ver sendas imágenes del circuito impreso.
Ilustración 6.14: Circuito impreso.
Ilustración 6.15: Parte trasera del circuito impreso.
Proyecto fin de carrera Juan Antonio Muñoz Japón
102
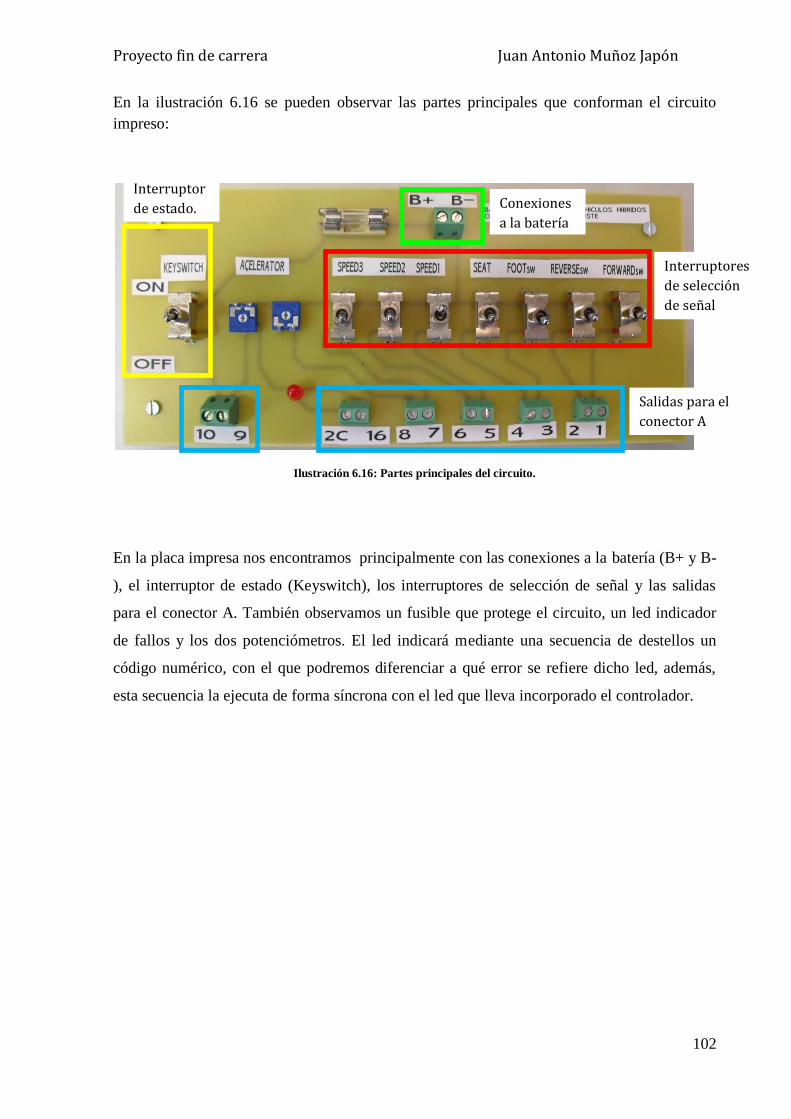
En la ilustración 6.16 se pueden observar las partes principales que conforman el circuito
impreso:
Ilustración 6.16: Partes principales del circuito.
En la placa impresa nos encontramos principalmente con las conexiones a la batería (B+ y B-
), el interruptor de estado (Keyswitch), los interruptores de selección de señal y las salidas
para el conector A. También observamos un fusible que protege el circuito, un led indicador
de fallos y los dos potenciómetros. El led indicará mediante una secuencia de destellos un
código numérico, con el que podremos diferenciar a qué error se refiere dicho led, además,
esta secuencia la ejecuta de forma síncrona con el led que lleva incorporado el controlador.
Conexiones
a la batería
Interruptores
de selección
de señal
Salidas para el
conector A
Interruptor
de estado.
Proyecto fin de carrera Juan Antonio Muñoz Japón
103
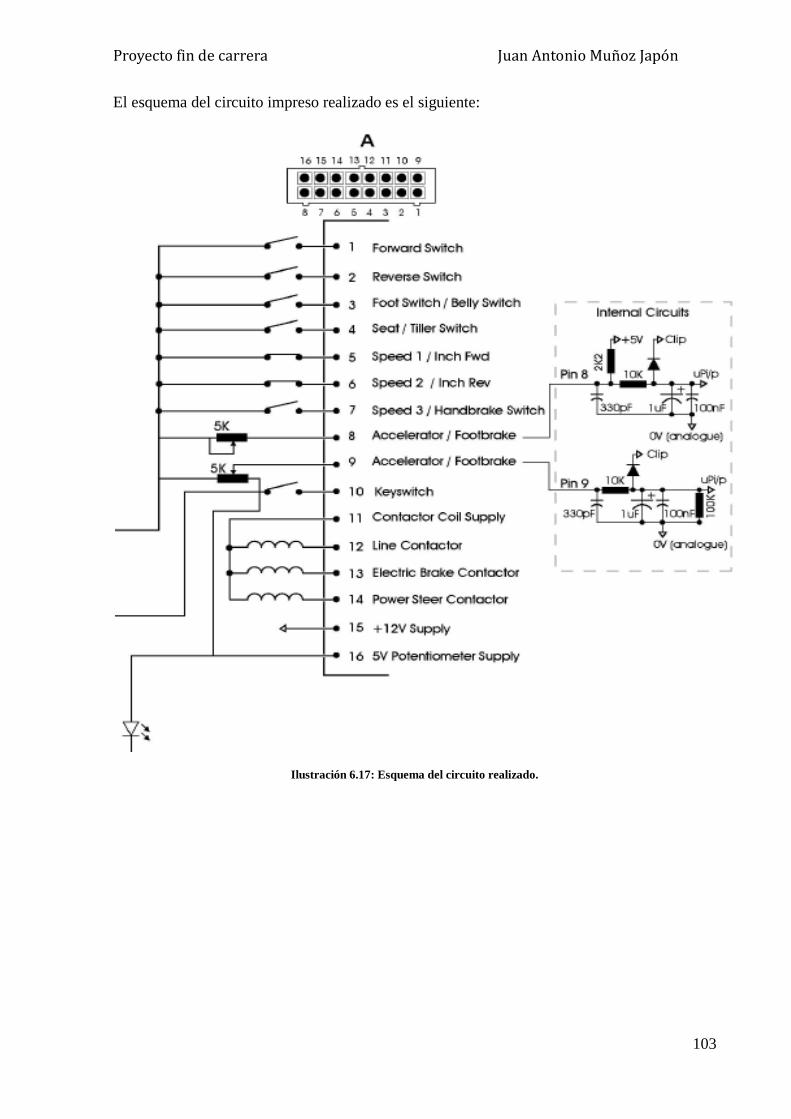
El esquema del circuito impreso realizado es el siguiente:
Ilustración 6.17: Esquema del circuito realizado.

Proyecto fin de carrera Juan Antonio Muñoz Japón
104
6.5 Ensayos del sistema Controlador-Motor: El último ensayo que he intentado realizar ha sido la prueba del conjunto controlador-motor.
Algunas imágenes del conjunto se muestran en las ilustraciones 6.18 y 6.19:
Ilustración 16.18: Montaje del sistema Controlador-Motor 1.
Ilustración 6.19: Montaje del sistema Controlador-Motor 2.
Proyecto fin de carrera Juan Antonio Muñoz Japón
105
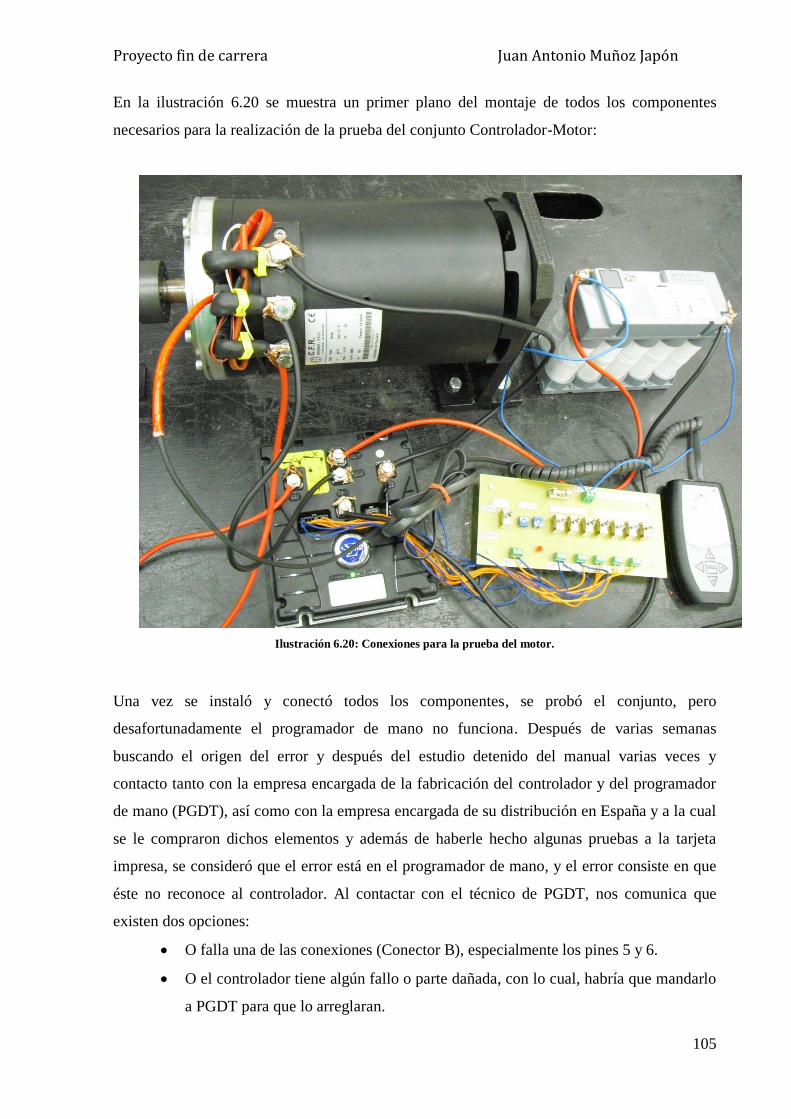
En la ilustración 6.20 se muestra un primer plano del montaje de todos los componentes
necesarios para la realización de la prueba del conjunto Controlador-Motor:
Ilustración 6.20: Conexiones para la prueba del motor.
Una vez se instaló y conectó todos los componentes, se probó el conjunto, pero
desafortunadamente el programador de mano no funciona. Después de varias semanas
buscando el origen del error y después del estudio detenido del manual varias veces y
contacto tanto con la empresa encargada de la fabricación del controlador y del programador
de mano (PGDT), así como con la empresa encargada de su distribución en España y a la cual
se le compraron dichos elementos y además de haberle hecho algunas pruebas a la tarjeta
impresa, se consideró que el error está en el programador de mano, y el error consiste en que
éste no reconoce al controlador. Al contactar con el técnico de PGDT, nos comunica que
existen dos opciones:
O falla una de las conexiones (Conector B), especialmente los pines 5 y 6.
O el controlador tiene algún fallo o parte dañada, con lo cual, habría que mandarlo
a PGDT para que lo arreglaran.

Proyecto fin de carrera Juan Antonio Muñoz Japón
106
Como las conexiones aparentemente están bien, y se le ha dedicado mucho tiempo al
conexionado se decide dejar en este punto la prueba ante la posibilidad de que el controlador
de mano tenga un problema de fábrica.
Me hubiera gustado poder realizar esta última prueba y ver el motor girando según los
parámetros que yo le indicara, pero tras todo este tiempo sin encontrar la solución, y ante la
idea de que el controlador esté mal y haya que mandarlo a Inglaterra, me resigno a acabar
aquí mi proyecto fin de carrera.





























