Embed Size (px)
Citation preview

i
Analys av energisystem till en
obemannad undervattensfarkost
Pontus Medborg
Examensarbete
Energihushållning
Institutionen för Energivetenskaper
LUNDS UNIVERSITET
Lunds Tekniska Högskola
Box 118, 221 00 Lund, Sverige
ISRN LUTMDN/TMHP--05/5078--SE
ii
Analys av energisystemtill en
obemannad undervattensfarkost
Pontus Medborg
Oktober 2005

iii
Föreliggande examensarbete har genomförts vid Avd för Energihushållning, Inst för Energi-
vetenskaper, Lunds Tekniska Högskola samt vid Kockums AB. Pär Dahlander och Per-Ola
Hedin på Kockums AB har varit projektledare och handledare medan docent Jurek Pyrko har
varit examinator på Lunds Universitet.
Examensarbete
ISRN LUTMDN/TMHP--05/5078—SE
ISSN 0282-1990
© Pontus Medborg samt Energivetenskaper
Energihushållning
Institutionen för Energivetenskaper
Lunds Universitet - Lunds Tekniska Högskola
Box 118, 221 00 Lund
www.vok.lth.se/~eep
i
FÖRORD
Examensarbetet Analys av Energisystem till en Undervattensfarkost är en energiteknisk studie som behandlar en autonom obemannad undervattensfarkosts (AUV) effekt- och energibehov. Studien innefattar en simulerad energiåtgång för en AUV:s inre komponenter samt strömningsmotstånds- och hållfasthetsberäkningar. Arbetet med studien har bedrivits under sommaren och hösten 2005.
Examensarbetet har utförts åt Kockums FoU-avdelning i Malmö. Ett stort tack skall riktas till Kockums för dess stöttning under min studietid. Framför allt följande personer på Kockums har bidragit med hjälp och värdefulla kommentarer till studien:
Pär DahlanderAnders ErikssonLinus GriekspoorPer-Ola HedinJohan JensenPaul Nilsson
Jag vill även rikta ett tack till min handledare på LTH, docent Jurek Pyrko för en bra handledning och för konstruktiva granskningskommentarer.
Malmö2005-10-04
i
SAMMANFATTNINGSyftet med denna studie är att beskriva, jämföra och dimensionera olika energisystem till en autonom obemannad undervattensfarkost, AUV, med en given storlek och med en uthållighet på sju dygn.Strömningsmotståndsberäkningar har utförts och ett systemarbete har genomförts för att fastställa komponenternas totala effektbehov. Energibehovet har simulerats och dessa värden har sedan legat som grund för dimensioneringen av energisystemen. En bred informationssökning har genomförts för att kunna beskriva och kommentera ett flertal energisystem. Energitekniska och ekonomiska kalkyler har genomförts vilka har visat på de olika systemens för- och nackdelar.Följande system studerades:
• Batterier• Solceller• Bränsleceller• Termoelektriska generatorer• Förbränningsmotorer
Systemen utvärderades och beräkningar har genomförts för att verifiera dess lämplighet och prestanda. Resultaten presenteras i form av en energimatris där systemens prestanda och volym- och massbehov redovisas. Det visar sig att det ej är meningsfullt eller ekonomiskt försvarbart att använda primärbatterier, bly-syra, NiCd, Na/NiCl2, AgZn -batterier, solceller, termoelektriska generatorer eller förbränningsmotorer för den typ av AUV som studerades. De batterisystem med bäst prestanda som verkade realistiska för en cyklisk drift i en AUV är nickelmetallhydrid- och litiumbatterierna. De har en hög energitäthet och en bra livslängd. Litiumbatteriet har en klart högre kostnad men också en högre energitäthet. Bland bränslecellerna är PEM-bränslecellen bäst lämpad. Tre olika bränsleförvaringssystem studerades:
• PEM-k PEM-bränslecell med komprimerad vätgasförvaring• PEM-m PEM-bränslecell med metanolreformer• PEM-MH PEM-bränslecell med väte bundet i metallhydrid
Komprimerad lagring av bränsle och oxidator ger ett tekniskt enkelt och robust system men det är ej särskilt energitätt. Användandet av en metanolreformer ökar energitätheten avsevärt men systemet blir mer kostsamt. Lagring av väte i metallhydrid är väldigt kostsamt och ger en dålig massbaserad energitäthet samtidigt som systemets tekniska mognad ej anses vara tillräcklig.
ii
ABSTRACTThe objective of this thesis is to describe, compare and dimension different energy systems ofan autonomous unmanned underwater vehicle, AUV, with a given size and for an endurance of seven days.
Fluid resistance calculations and systems engineering work has been carried out to determine the power needs of the components. The energy needs have been simulated and the output from these calculations has been the foundation to the dimension of the energy systems. A broad information survey has been carried out to be able to describe and comment several numbers of energy systems.
Both technical and economic energy calculations have been carried out in purpose to show the advantages and disadvantages of the systems.
The following systems were studied:
• Batteries• Solar power cells• Fuel cells• Thermoelectric generators• Combustion engines
The systems were evaluated and calculations were carried out to verify their suitability and performance. The results are shown in a matrix where the systems performance and volume and mass needs are shown.
It was proved that primary batteries, lead-acid, NiCd, Na/NiCl2, and AgZn -batteries, solar power cells, thermoelectric generators or combustion engines have poor abilities to work in this type of an AUV. The systems that seem to be realistic for a cyclic use in the AUV and with the best performance are the nickelmetalhydride and the lithium batteries. They have a high energy density and good lifetime characteristics.
Among the fuel cells the PEM-fuel cell is the best suited for the AUV. Three different types of fuel storing systems were studied:
• PEM-k PEM fuel cell with compressed hydrogen storage• PEM-m PEM fuel cell with methanol reformer• PEM-MH PEM fuel cell with hydrogen bound in metal hydride
Compressed storage of hydrogen and oxygen gives a simple and robust technical system but the energy density is quite low. The use of a methanol reformer will considerable increase the energy density but the system will also be more expensive. The storage of hydrogen in metal hydride is very expensive and the mass based energy density is low. The maturity of this concept is not considered to be sufficient but it has the potential to be developed in a positive way.
iii
Förkortningar och uttryckAC Alternating Current -växelström
AFC Alkaline Fuel Cell
AUV Autonomous Underwater Vehicle
BC Bränslecell
CCD Closed Cycle DieselCFD Computational Fluid Dynamics
DC Direct current –likström
DCN Direction Construction de Naval
DoD Depth of discharge
FC Fuel Cell
kn knop, 0.5144 m/s
LCC Life Cycle CostLHV Lower Heating Value
MESMA Module d'Energie Sous-Marin AutonomeMCFC Molten Carbonate Fuel CellMH Metallhydrid
naut mil nautisk mil- sjömil, 1852 meter
PEMFC Protone Exchange Membrane Fuel Cell
PEM-k Protone Exchange Membrane Fuel Cell med komprimerad vätgasförvaringPEM-m Protone Exchange Membrane Fuel Cell med metanolreformerPEM-MH Protone Exchange Membrane Fuel Cell med metallhydridlagring
ROV Remotely Operated VehicleRTG Radioisotope Thermoelectric Generator
SOFC Solid Oxide Fuel Cell
UTV Underwater Towed VehicleUUV Unmanned Underwater Vehicle
Obstacle avoidance sonar Framåtriktad sonar avsedd för att upptäcka hinder i farkostens vägSidescan sonar Sidoriktad sonarTrustor Propellerkonfiguration där propellern är inkapslad
iv
FÖRORD .......................................................................................................................................................... iSAMMANFATTNING...................................................................................................................................... iABSTRACT ..................................................................................................................................................... iiFörkortningar och uttryck.................................................................................................................................iii1 INLEDNING ............................................................................................................................................ 1
1.1 Bakgrund........................................................................................................................................... 11.2 Problemformulering........................................................................................................................... 11.3 Mål ................................................................................................................................................... 11.4 Avgränsningar ................................................................................................................................... 11.5 Metodik............................................................................................................................................. 11.6 Disposition ........................................................................................................................................ 2
2 NULÄGESBESKRIVNING...................................................................................................................... 22.1 Beskrivning av obemannade undervattensfarkoster............................................................................. 2
2.1.1 ROV .......................................................................................................................................... 22.1.2 UTV .......................................................................................................................................... 22.1.3 AUV.......................................................................................................................................... 3
2.2 Beskrivning av autonoma undervattensfarkoster ................................................................................. 32.2.1 Historia...................................................................................................................................... 32.2.2 AUV:ns beståndsdelar................................................................................................................ 42.2.3 AUV:ns funktioner..................................................................................................................... 4
2.2.3.1 Autonomitet .......................................................................................................................... 42.2.3.2 Energi ................................................................................................................................... 42.2.3.3 Navigation............................................................................................................................. 52.2.3.4 Sensorer ................................................................................................................................ 52.2.3.5 Kommunikation..................................................................................................................... 5
2.3 Dagens AUV:er ................................................................................................................................. 62.3.1 Hugin......................................................................................................................................... 62.3.2 REMUS..................................................................................................................................... 62.3.3 R-One Robot.............................................................................................................................. 72.3.4 Manta ........................................................................................................................................ 82.3.5 AUV62F.................................................................................................................................... 82.3.6 SAUV II .................................................................................................................................... 8
3 KRAVANALYS ..................................................................................................................................... 103.1 Storlek............................................................................................................................................. 113.2 Obligatoriska komponenter .............................................................................................................. 113.3 Nyttolast.......................................................................................................................................... 113.4 Dykdjup .......................................................................................................................................... 113.5 Uthållighet....................................................................................................................................... 113.6 Autonomitet .................................................................................................................................... 123.7 Signaturer........................................................................................................................................ 123.8 Tillgänglighet .................................................................................................................................. 123.9 Kostnad........................................................................................................................................... 12
4 TEORI OCH BERÄKNINGAR............................................................................................................... 134.1 Hydrodynamik................................................................................................................................. 13
4.1.1 Skrovform................................................................................................................................ 134.1.1.1 Skrovform anpassad för laminär strömning .......................................................................... 134.1.1.2 Torpedkroppsform............................................................................................................... 14
4.1.2 Vald kroppsform...................................................................................................................... 144.1.3 Strömningsmotståndsberäkningar ............................................................................................. 15
4.1.3.1 Submersible Vehicle Systems Design (SVSD) ..................................................................... 164.1.3.2 White och Hoerner .............................................................................................................. 164.1.3.3 SSPA .................................................................................................................................. 164.1.3.4 Roderberäkningar ................................................................................................................ 164.1.3.5 Propellerverkningsgrad........................................................................................................ 174.1.3.6 Sammanfattning strömningsmotståndsberäkningar ............................................................... 17
4.1.4 Roderdimensionering ............................................................................................................... 184.2 Hållfasthetsberäkningar tryckskrov .................................................................................................. 21
4.2.1 Beräkningar ............................................................................................................................. 214.2.1.1 Cylinder utan spant.............................................................................................................. 21
v
4.2.1.2 Gavel .................................................................................................................................. 224.2.1.3 Vikt och deplacement .......................................................................................................... 23
4.3 Energiåtgång ................................................................................................................................... 234.3.1 Scenario................................................................................................................................... 23
4.3.1.1 Operationsprofil I, 1 dygn.................................................................................................... 244.3.1.2 Operationsprofil II, 3 dygn................................................................................................... 254.3.1.3 Operationsprofil III, 7 dygn ................................................................................................. 25
4.4 Energianalys.................................................................................................................................... 264.4.1 Batterier................................................................................................................................... 26
4.4.1.1 Primärbatterier..................................................................................................................... 27Litium-Mangandioxid (LiMnO2)...................................................................................................... 27
4.4.1.2 Sekundärbatterier................................................................................................................. 28Bly-syra........................................................................................................................................... 28Nickel-Kadmium (NiCd) ................................................................................................................. 30Natrium-Nickelklorid (Na/NiCl2) ..................................................................................................... 31Silver-Zink (AgZn).......................................................................................................................... 32Litium-jon ....................................................................................................................................... 33Litium-polymer ............................................................................................................................... 34Nickel/metallhydrid (Ni/MH)........................................................................................................... 35
4.4.1.3 Batterier -sammanfattning.................................................................................................... 374.4.2 Solceller................................................................................................................................... 404.4.3 Bränsleceller ............................................................................................................................ 40
4.4.3.1 AFC Alkaline Fuel Cell ....................................................................................................... 424.4.3.2 PAFC Phosphoric Acid Fuel Cell......................................................................................... 424.4.3.3 MCFC Molten Carbonate Fuel Cell...................................................................................... 434.4.3.4 SOFC Solid Oxide Fuel Cell................................................................................................ 434.4.3.5 PEMFC Protone Exchange Membrane Fuel Cell .................................................................. 434.4.3.6 Beräkningsexempel för PEMFC........................................................................................... 44
Bränslelagring till PEMFC............................................................................................................... 44Val av förvaringssätt för bränsle och oxidator till bränslecellen......................................................... 48PEM-k Beräkningar för bränslecell Cellkraft S-2000....................................................................... 49PEM-m Beräkningar för BC Cellkraft S-2000 med Idatech metanolreformer ................................... 50PEM-MH Beräkningar för BC Cellkraft S-2000 med metallhydrid LaNi5 ........................................ 52
4.4.3.7 Bränsleceller -sammanfattning............................................................................................. 534.4.4 Termoelektriska generatorer ..................................................................................................... 55
4.4.4.1 Konventionella generatorer.................................................................................................. 564.4.4.2 Radioisotopbaserade generatorer.......................................................................................... 564.4.4.3 Termoelektriska generatorer -sammanfattning...................................................................... 57
4.4.5 Stirling..................................................................................................................................... 574.4.6 Kretsdiesel ............................................................................................................................... 584.4.7 Ångturbiner ............................................................................................................................. 594.4.8 Övriga energiomvandlare ......................................................................................................... 59
5 RESULTAT............................................................................................................................................ 606 SLUTSATSER........................................................................................................................................ 687 KONKLUSIONER OCH REKOMMENDATIONER .............................................................................. 708 REFERENSER ....................................................................................................................................... 71BILAGOR...................................................................................................................................................... 74
1
1 INLEDNINGDetta examensarbete har utförts åt Kockums AB i Malmö. Kockums konstruerar, bygger och underhåller ubåtar och örlogsmarina system med avancerad smygteknik. Andra produkter som marknadsförs är det luftoberoende Stirling-systemet, ubåtsräddningssystem och minröjningssystem. Företaget har ca 900 anställda varav 250 på huvudkontoret i Malmö. Kockums ingår i ThyssenKrupp Marine Systems. Studiens syfte har varit att beskriva och utreda olika energisystem anpassade till en obemannad undervattensfarkost.
1.1 BakgrundObemannade farkoster är på stark frammarsch. Många farkoster har redan utvecklats för att operera på land eller i luften. Det finns ett flertal AUV:er (Autonomous Underwater Vehicle) framtagna för att operera under havsytan men de är nästan uteslutande batteridrivna. Genom att använda autonoma obemannade farkoster istället för bemannade slipper man utsätta personal för risker vid uppdrag i osäkra områden samtidigt som det är ett kostnadseffektivt sätt att t ex insamla information och utföra komplicerade uppgifter på stora djup.
1.2 ProblemformuleringEn förstudie skall genomföras som beskriver en AUV där tonvikten ska läggas på att beskriva och analysera olika energisystem som kan passa en AUV avsedd för en uthållighet mellan ettoch sju dygn. Hänsyn skall tagas till de operativa krav som ställs på en AUV avseende prestanda, vikt- och volymbalans och signaturer.
1.3 MålAtt kunna lägga fram olika förslag på autonoma energisystem som är anpassade till en AUV. Energisystemens uppbyggnad och funktion skall beskrivas. Dess egenskaper analyseras utifrån dess lämplighet i en autonom undervattensfarkost. Tekniska och enklare ekonomiska beräkningar skall genomföras för att kunna rekommendera vilka energisystem som skulle kunna lämpa sig bäst i en AUV.
1.4 AvgränsningarAtt fokusera på jämförelsen mellan olika energisystem i en AUV men samtidigt ta hänsyn till de operativa krav som gäller avseende prestanda, vikt och volymbalans och signaturer. Syftet med studien är inte att presentera en AUV med ett komplett generalarrangemang utan tonvikten ska läggas på att beskriva, dimensionera och analysera olika energisystem till en AUV med ett framtidsperspektiv på ca 10 år. Farkostens huvudmått och prestanda (maxfart, räckvidd, djupgående och operationstid) är givna och energisystemet skall anpassas efter dessa förutsättningar. AUV:n skall designas för en uppdragstid på mellan ett och sju dygn.
1.5 MetodikAtt förutsättningslöst jämföra olika energisystem med hjälp av ett systemarbete som grundar sig på informationssökning genom litteraturstudier, sökning på internet och genom kontakter med industri och högskola. Rapporten skall innehålla en analys och beskrivning av olika energisystems prestanda och lämplighet i en obemannad autonom undervattensfarkost. Attundersöka marknaden på vilka energisystem som kan lämpa sig för autonom drift och analysera och göra en jämförelse mellan dessa samtidigt som man beaktar signaturer och prestanda för långa operationstider.
2
1.6 DispositionRapporten består av en inledning med problemformulering, mål och avgränsningar följt av en allmän beskrivning av undervattensfarkoster för att inviga läsaren i ämnet. En generisk AUV beskrivs sedan och några av dagens AUV:er beskrivs kortfattat. Därefter skildraskravanalysen för att fastställa vad som skall gälla inför kapitel Teori och beräkningar. Ett koncentrat av detta kapitel finns beskrivet i Resultat följt av rekommendationer och konklusioner i kapitlet Slutsatser.
Då problemställningen var öppen till formuleringen har visst arbete ägnats åt strömningsberäkningar och att simulera energiåtgången för att skapa realistiska förutsättningar vid dimensioneringen av energisystemen. Vissa delar i studien har tilldelats större utrymme än andra i de fall då de bedömts ha en bra framtidspotential och vara särskilt bra anpassade till den studerade applikationen.
2 NULÄGESBESKRIVNING
2.1 Beskrivning av obemannade undervattensfarkosterUndervattensfarkoster finns i ett flertal utförande och det är inte helt lätt att kategorisera dem. Ett sätt kan vara att identifiera dem som medlemmar i två olika klasser av farkoster, bemannade och obemannade. Till de bemannade hör ubåtar och diverse dykfarkoster somoftast har någon slags framdrivning.De obemannade kan delas in i tre undergrupper. Den vedertagna förkortningen för en obemannad undervattensfarkost är UUV – Unmanned Underwater Vehicle och en UUV kan delas in i följande undergrupper:
• ROV – Remotely Operated Vehicle• UTV – Underwater Towed Vehicle• AUV – Autonomous Underwater Vehicle
2.1.1 ROVEn ROV är en undervattensfarkost som fjärrstyrs av en operatör. Den är vanligen kopplad till ett moderfartyg med en kabel som förser ROV:n med energi och styrsignaler. Moderfartyget är oftast ett ytfartyg som är specialanpassat för att kunna serva ROV:n. Kabeln ger ROV:n i stort sätt obegränsad tillgång till energi och bandbredd men är samtidigt ett hinder för farkosten när den ska manövreras. Farkosten kan också vara radiostyrd. ROV:n började utvecklas på 50-talet och har använts i vetenskapliga, militära och kommersiella områden.Idag används ROV:n i stor utsträckning som arbetsrobotar av offshoreindustrin.
2.1.2 UTVUTV:n är en undervattensfarkost som släpas efter ett moderfartyg i en vajer. Den har inget eget framdrivningssystem utan är beroende av moderfartygets rörelser för framdriften. De kan dock ha roder som medger viss manövrering. Farkosten används främst på begränsade djup och är försedda med sensorer för att kunna utföra oceanografiska undersökningar. En UTV kan ses som ett enklare och billigare alternativ till en ROV.
3
2.1.3 AUVEn AUV är en helt autonom farkost. Med autonom menas att efter farkosten har blivit sjösatt från ett ytfartyg eller en ubåt ska den ha förmågan att operera självständigt och utan styrsignaler och tillförsel av energi. Den ska kunna utföra ett förprogrammerat uppdrag under vatten utan någon kommunikation med en operatör.
2.2 Beskrivning av autonoma undervattensfarkoster
2.2.1 HistoriaDen första och kanske mest kända AUV:n får sägas vara ubåtstorpeden som tillverkades redan i början av 1900-talet. På 60-talet utvecklades de första riktiga AUV:erna som hadebegränsade användningsområden, ofta någon form av insamling av oceanografiska data eller militära applikationer. På 80-talet tog utvecklingen fart och ett flertal farkoster utvecklades med avancerade styr och reglersystem som kunde klara av komplicerade uppgifter på stora djup. Detta tack vare dator- och mjukvaruutvecklingen där små, kraftfulla och energisnåla datorer gav möjligheten att införa komplexa styr- och kontrollalgoritmer på en autonom plattform. I slutet av 90-talet gick utvecklingen från specialbyggda prototyper för vetenskapliga och militära ändamål mot mer kommersiellt gångbara farkoster som är anpassade för den civila marknaden, då främst oljeindustrin.
En AUV kan ha många användningsområden. Inom vetenskapen används de för oceanografiska undersökningar och kartografi. Farkosten kan undersöka och insamla stora mängder information över vidsträckta områden och klarar väldigt stora djup. På det kommersiella området är det oljeindustrin som finansierar utvecklingen. Många AUV:er har tagits fram för olika typer av undervattensarbeten såsom bottenundersökningar, oceanografiska undersökningar och inspektioner av pipelines på stora djup.
Inom det militära har AUV:n ett flertal användningsområden och stora resurser satsas för att utveckla farkosterna vidare. De används som en framskjuten plattform för olika sensorer. Genom att använda autonoma farkoster istället för bemannade slipper man utsätta personal för risker i osäkra områden. I ubåtssammanhang är det ofta av största vikt att inte avslöja sin närvaro och då finns det många fördelar med att kunna sända ut en tyst farkost till området man vill undersöka. AUV:er används också i minröjningsoperationer där ett flertal farkosterkan sändas ut som undersöker ett område efter minor och sedan märker ut deras position så att man kan oskadliggöra dem. Det har även utvecklats större system som i sin tur kan bära med sig mindre AUV:er och torpeder.

4
Styr/regler-sektion
Tryckfast sektion
2.2.2 AUV:ns beståndsdelarFigur 1 visar hur en generisk AUV kan se ut. Farkosten består av ett yttre formskrov med en fördelaktig hydrodynamisk form som innesluter farkostens utrustning. Den tryckfasta sektionen skyddar elektroniken och energisektionen som i detta exempel består av batterier. I fören sitter en framåtriktad sonar, obstacle avoidance sonar som ska varna farkosten för hinder i dess väg. I mitten finns en nyttolastsektion som ska fungera som ett flexibelt utrymme för diverse sensorer. Vanligen medförs en sonar för undersökning av bottenstrukturen och olika typer av instrument för att mäta vattnets fysikaliska egenskaper. I aktern sitter och roder framdrivningsmaskineri. Många farkoster har dessutom extra trustrar för förbättrad lågfartsmanövrering.
Sonar Nyttolastsektion Energisektion Roder Trustor
Figur 1. Principskiss på en generisk AUV
2.2.3 AUV:ns funktionerDet man vanligen eftersträvar att förbättra hos en AUV är följande funktioner: Autonomitet, energi, navigation, sensor och kommunikationsfunktionerna.
2.2.3.1 AutonomitetDet är viktigt att farkosten klarar av ett i förväg bestämt uppdrag även om förutsättningarna ändras i dess miljö. Den måste kunna anpassa sig till de yttre förhållandena och kunna ta egna beslut vad gäller kurs, fart, djup etc. för att kunna utföra det tilldelade uppdraget. Detta gäller även dess inre system, om det t ex skulle uppstå ett driftstopp i något system skall farkosten klara av att starta om detta om det inte är fråga om ett totalhaveri. Det är även önskvärt attAUV:n klarar av att återvända och docka med moderfartyget efter uppdraget.
2.2.3.2 EnergiEn av AUV:ns nackdelar är den begränsade räckvidden och uthålligheten. Många av AUV:nssystem använder mycket energi. Förutom framdriften krävs det ett avancerat styr- och övervakningssystem och aktiva sonarer som också använder mycket energi. Det är av största vikt att välja ett så energitätt framdrivningssystem som möjligt och samtidigt så energisnåla komponenter som möjligt till AUV:n.
5
2.2.3.3 NavigationEn viktig egenskap hos en AUV är att kunna navigera med stor noggrannhet under en längre tid. Detta medför svårigheter då en AUV i uläge inte kan kontrollera sin position med hjälp avGPS. För att få en korrekt positionsbestämning måste då farkosten mäta upp sin rörelse relativt sjöbotten eller utnyttja ett gyrosystem.
2.2.3.4 SensorerEn absolut nödvändig funktion vid autonomt uppträdande i okända undervattensmiljöer är en framåtriktad sonar som kan varna för hinder i AUV:ns väg. Beroende på uppdraget kan flera sonarer behövas och det kan vara svårt att få tillräcklig upplösning på sonarinformationen. Andra sensorer som kan nämnas är tryckmätare, temperaturmätare och ljudhastighetsmätare.
2.2.3.5 KommunikationAUV:erna är ofta försedda med kommunikationsutrustning för både över och undervattenskommunikation. I u-läge går det bara att kommunicera kortare sträckor med farkosten på grund av att radiovågor har svårt att propagera i vatten. Lågfrekventa ljudvågor har längre räckvidd men kan samtidigt inte överföra särskilt mycket information.
6
2.3 Dagens AUV:erDe flesta av dagens AUV:er är batteridrivna, ofta med någon sorts högeffektbatterier. USAstår i spetsen i utvecklingen med ett flertal farkoster framtagna. Många AUV:er bygger på en torpedkropp som modifierats med extra trustrar. Farkosterna finns i en mängd olika utföranden och i storlekar från några kilo upp till ca 200 ton. Den största kända AUV:n är den amerikanska LSV2 som är en modell av Virginiaklassubåten i skala 1:3. Nedan är en del av dagens AUV:er översiktligt beskrivna vad gäller deras prestanda.
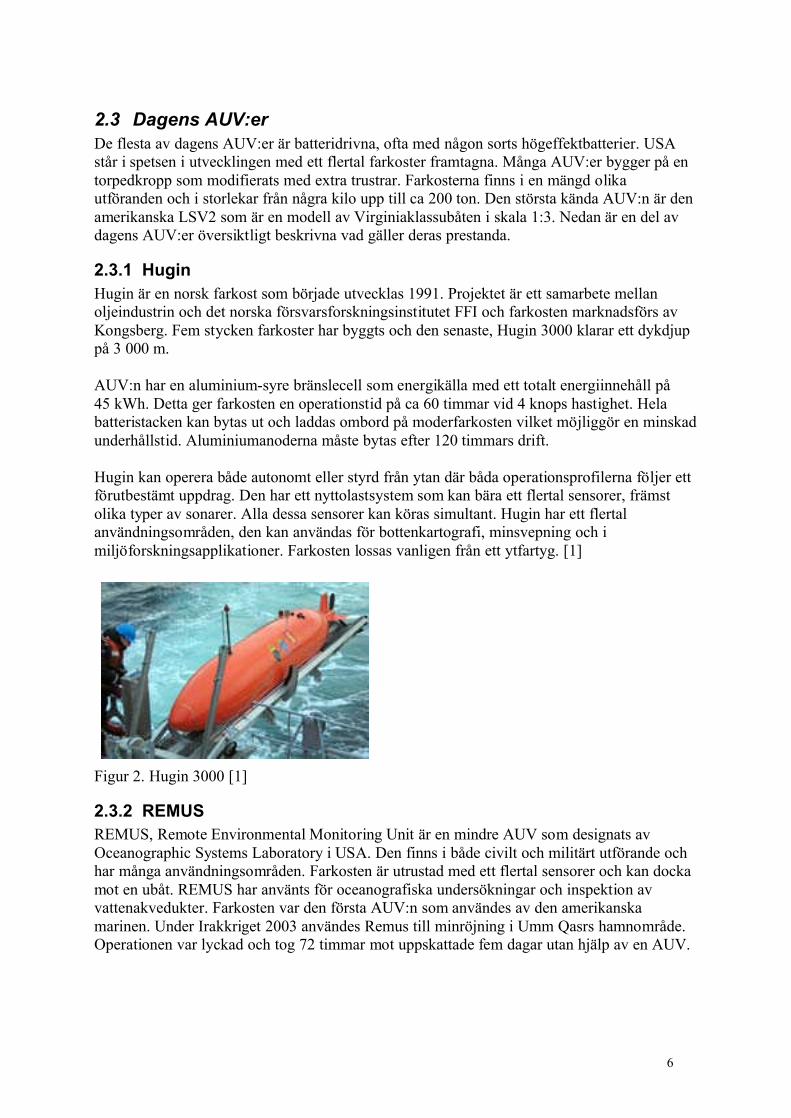
2.3.1 HuginHugin är en norsk farkost som började utvecklas 1991. Projektet är ett samarbete mellan oljeindustrin och det norska försvarsforskningsinstitutet FFI och farkosten marknadsförs av Kongsberg. Fem stycken farkoster har byggts och den senaste, Hugin 3000 klarar ett dykdjup på 3 000 m.
AUV:n har en aluminium-syre bränslecell som energikälla med ett totalt energiinnehåll på 45 kWh. Detta ger farkosten en operationstid på ca 60 timmar vid 4 knops hastighet. Hela batteristacken kan bytas ut och laddas ombord på moderfarkosten vilket möjliggör en minskad underhållstid. Aluminiumanoderna måste bytas efter 120 timmars drift.
Hugin kan operera både autonomt eller styrd från ytan där båda operationsprofilerna följer ett förutbestämt uppdrag. Den har ett nyttolastsystem som kan bära ett flertal sensorer, främst olika typer av sonarer. Alla dessa sensorer kan köras simultant. Hugin har ett flertal användningsområden, den kan användas för bottenkartografi, minsvepning och i miljöforskningsapplikationer. Farkosten lossas vanligen från ett ytfartyg. [1]
Figur 2. Hugin 3000 [1]
2.3.2 REMUSREMUS, Remote Environmental Monitoring Unit är en mindre AUV som designats av Oceanographic Systems Laboratory i USA. Den finns i både civilt och militärt utförande och har många användningsområden. Farkosten är utrustad med ett flertal sensorer och kan docka mot en ubåt. REMUS har använts för oceanografiska undersökningar och inspektion av vattenakvedukter. Farkosten var den första AUV:n som användes av den amerikanska marinen. Under Irakkriget 2003 användes Remus till minröjning i Umm Qasrs hamnområde. Operationen var lyckad och tog 72 timmar mot uppskattade fem dagar utan hjälp av en AUV.

7
REMUS drivs av bly-syra eller litiumjonbatterier. Hela batteristacken kan bytas ut mot en ny på några få minuter. Med blybatteriuppsättningen kan REMUS operera i cirka 3 timmar med en hastighet på 3 knop och med litiumjonbatterierna 22 timmar. [2, 3, 4]
Figur 3. REMUS [5]
2.3.3 R-One RobotR-One Robot är en stor AUV som tillverkats av Mitsui Engineering i Japan. Den har ett torpedliknande formskrov och den togs i drift 1996. Den har utfört flera uppdrag på stora djup, främst bottenundersökningar med olika typer av sonarer. Farkosten är utrustad med en luftoberoende sluten kretsdieselmotor. Syrgasen till dieselmotorn lagras kryogeniskt i en tank inne i tryckskrovet.
Motorn utnyttjar argon som arbetsgas där syre och diesel tillsätts. Avgaserna kyls sedan ner av sjövatten och förs genom en skrubber där CO2 och andra resprodukter från förbränningen avskiljs. Argongasen återför sedan till motorn för en ny cykel. Kretsdieselmaskineriet ger farkosten en räckvidd på 75 nautiska mil. [2]
Figur 4. R-One Robot [6]
8
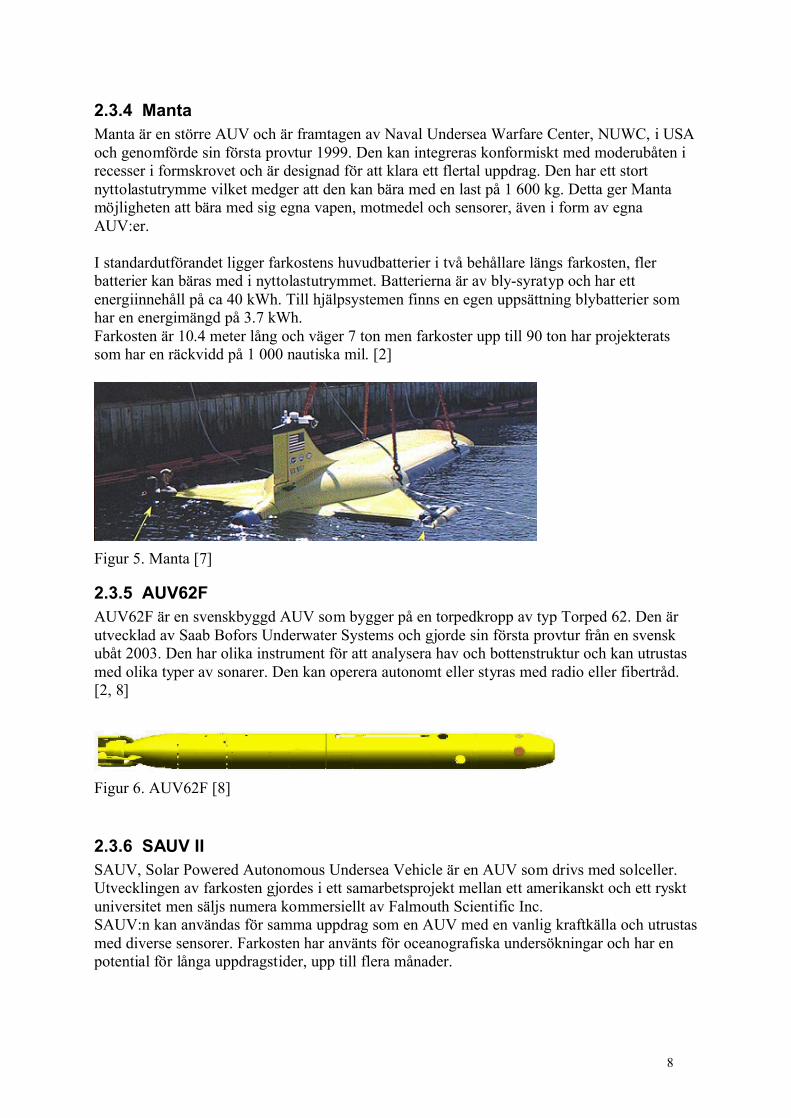
2.3.4 MantaManta är en större AUV och är framtagen av Naval Undersea Warfare Center, NUWC, i USA och genomförde sin första provtur 1999. Den kan integreras konformiskt med moderubåten i recesser i formskrovet och är designad för att klara ett flertal uppdrag. Den har ett stortnyttolastutrymme vilket medger att den kan bära med en last på 1 600 kg. Detta ger Manta möjligheten att bära med sig egna vapen, motmedel och sensorer, även i form av egna AUV:er.
I standardutförandet ligger farkostens huvudbatterier i två behållare längs farkosten, fler batterier kan bäras med i nyttolastutrymmet. Batterierna är av bly-syratyp och har ett energiinnehåll på ca 40 kWh. Till hjälpsystemen finns en egen uppsättning blybatterier som har en energimängd på 3.7 kWh.Farkosten är 10.4 meter lång och väger 7 ton men farkoster upp till 90 ton har projekterats som har en räckvidd på 1 000 nautiska mil. [2]
Figur 5. Manta [7]
2.3.5 AUV62FAUV62F är en svenskbyggd AUV som bygger på en torpedkropp av typ Torped 62. Den är utvecklad av Saab Bofors Underwater Systems och gjorde sin första provtur från en svensk ubåt 2003. Den har olika instrument för att analysera hav och bottenstruktur och kan utrustas med olika typer av sonarer. Den kan operera autonomt eller styras med radio eller fibertråd. [2, 8]
Figur 6. AUV62F [8]
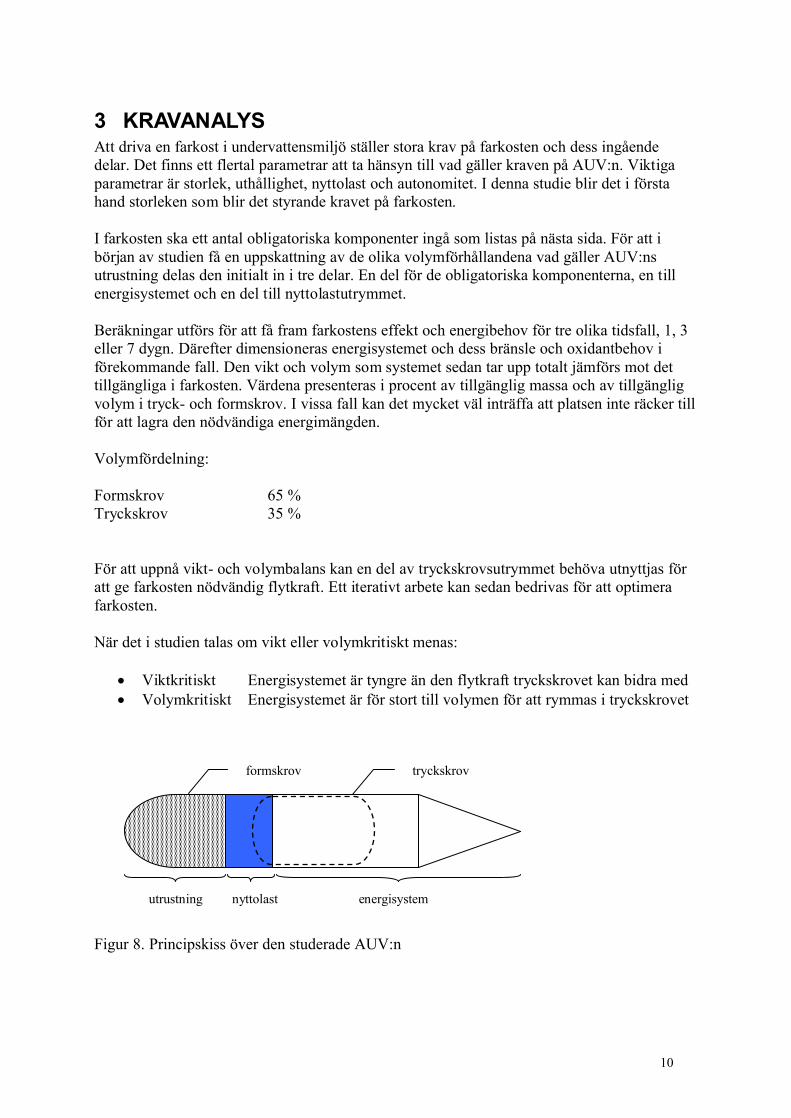
2.3.6 SAUV IISAUV, Solar Powered Autonomous Undersea Vehicle är en AUV som drivs med solceller. Utvecklingen av farkosten gjordes i ett samarbetsprojekt mellan ett amerikanskt och ett rysktuniversitet men säljs numera kommersiellt av Falmouth Scientific Inc. SAUV:n kan användas för samma uppdrag som en AUV med en vanlig kraftkälla och utrustas med diverse sensorer. Farkosten har använts för oceanografiska undersökningar och har en potential för långa uppdragstider, upp till flera månader.
9
Den drivs av en uppsättning solceller som sitter monterade på farkostens vingliknande ovansida. Farkosten går huvudsakligen i u-läge nattetid och går upp till ytan under dagen för att ladda litiumjonbatterierna och stämma av sin position till användaren mha gps.
Dess främsta fördel är att den kan operera långa tider i autonom drift tack vare solcellerna. En ensam truster ger farkosten en hastighet upp till 3 knop. Dess räckvidd är beroende av effekten på solstrålningen och hur länge man kan tillåta farkosten att gå i ytläge. Som exempel kan nämnas att med solceller som har en verkningsgrad på ca 10 % kan farkosten ladda ca 500 Wh per dag till batterierna vid de mellersta latituderna vilket kan ge farkosten en räckvidd på ca 27 nautiska mil. [2]
Figur 7. SAUV II [9]
Tabell 2.1. Sammanfattning, farkosternas egenskaper och prestandaHugin SAUV II AUV62F Remus Manta R-One Robot
Vikt [kg] 1 400 200 1 200 37 7 000 4 350Längd [m] 5.35 2.3 7 1.6 10.4 8.27Diam. [m] 1 1.1 (bredd) 0.53 0.19 2.44 (bredd) 1.15Dykdjup [m] 3 000 500 ? 100 244 400Räckvidd [naut. m] 240 >27 40 65 65 50Uthållighet 60 h @ 4 kn ber. av solstr. >24 h 22 h @ 3 kn 13 h @ 5 kn 25 h @ 2 knHast [knop] 4 1-3 0.5-12 0.5-5.5 0-10 0-3.6Energityp AlO/ FC Solcell/Li-jon Li-jon Li- jon Bly-syra KretsdieselTot energimängd[kWh]
45 ber. av solstr. 12 >1 >43 125
10
utrustning nyttolast energisystem
3 KRAVANALYSAtt driva en farkost i undervattensmiljö ställer stora krav på farkosten och dess ingående delar. Det finns ett flertal parametrar att ta hänsyn till vad gäller kraven på AUV:n. Viktiga parametrar är storlek, uthållighet, nyttolast och autonomitet. I denna studie blir det i första hand storleken som blir det styrande kravet på farkosten.
I farkosten ska ett antal obligatoriska komponenter ingå som listas på nästa sida. För att i början av studien få en uppskattning av de olika volymförhållandena vad gäller AUV:ns utrustning delas den initialt in i tre delar. En del för de obligatoriska komponenterna, en till energisystemet och en del till nyttolastutrymmet.
Beräkningar utförs för att få fram farkostens effekt och energibehov för tre olika tidsfall, 1, 3 eller 7 dygn. Därefter dimensioneras energisystemet och dess bränsle och oxidantbehov i förekommande fall. Den vikt och volym som systemet sedan tar upp totalt jämförs mot det tillgängliga i farkosten. Värdena presenteras i procent av tillgänglig massa och av tillgänglig volym i tryck- och formskrov. I vissa fall kan det mycket väl inträffa att platsen inte räcker till för att lagra den nödvändiga energimängden.
Volymfördelning:
Formskrov 65 %Tryckskrov 35 %
För att uppnå vikt- och volymbalans kan en del av tryckskrovsutrymmet behöva utnyttjas för att ge farkosten nödvändig flytkraft. Ett iterativt arbete kan sedan bedrivas för att optimera farkosten.
När det i studien talas om vikt eller volymkritiskt menas:
• Viktkritiskt Energisystemet är tyngre än den flytkraft tryckskrovet kan bidra med• Volymkritiskt Energisystemet är för stort till volymen för att rymmas i tryckskrovet
Figur 8. Principskiss över den studerade AUV:n
tryckskrovformskrov
11
3.1 StorlekFör att kunna integrera AUV:n i framtida ubåtar antages att storleken inte bör överskrida en cylindrisk form med diametern 1.3 m och längden 6 m. Detta ger farkosten en maxvolym på ca 6 m3.
3.2 Obligatoriska komponenterFör att kunna göra en rimlig uppskattning på propellermotorns, sensorernas och hjälpsystemens energibehov måste den obligatoriska utrustningen listas och dess effektbehov redovisas. Ett operationsscenario upprättas där de ingående komponenternas driftstid uppskattas under ett uppdrag för att få fram den totala energimängden som krävs under ett uppdrag. Se Bilaga 1 för varje komponents effektbehov.
Obligatoriska komponenter:
PropellermotorObstacle Avoidance SonarRoderservonSide Scan SonarMultibeam SonarProcessordel sonarerCentraldator, styrenhetDopplerloggGyrokompass INSGPS-mottagareRadio (ytlägeskommunikation)Hydroakustisk länk (undervattenskommunikation)[10]
3.3 NyttolastDetta utrymme skall ses som ett flexibelt utrymme där ytterligare sensorer, energi eller vapen skall kunna lagras. Nyttolastutrymmet antages till största delen vara fördelat under formskrovet.
3.4 DykdjupFarkosten är tänkt att i huvudsak operera i grunda vatten, hamnar och farleder men skall kunna sjösättas från större djup av en ubåt. Dykdjupet som farkosten skall designas för sätts därför till 100 m för att klara av de flesta situationerna som kan tänkas uppkomma i Sveriges närområde.
3.5 UthållighetTre olika fall ska studeras. Beräkningar skall utföras för en driftstid på 1, 3 och 7 dygn med hastigheter som varierar mellan 1 och 6 knop. Beräkningar utförs för att visa vilken hastighet som är den mest ekonomiska ur energisynpunkt. Resultatet från dessa beräkningar skall då visa hur många procent av utrymmet som blir över (om det blir något) till nyttolastutrymmet i de olika tidsfallen med de olika energisystemen. Data redovisas sedan i form av en matris som innehåller driftstid, typ av energisystem och det utrymme som energisystemet behöver utnyttja.
12
3.6 AutonomitetAUV:n skall klara en autonom drift i en veckas tid dvs farkosten skall klara av ett förprogrammerat uppdrag utan styrning från en operatör. Den bör själv klara av att besluta om ändring i kurs eller djup om hinder i dess närmiljö skulle dyka upp. Farkosten skall även kunna göra felsökningar och egna åtgärder på sina system i fall någon driftstörning skulle uppkomma så länge det inte rör sig om ett totalhaveri. Då skall farkosten, beroende på feletoch var den befinner sig, inta yt- eller bottenläge och eventuellt sända ut radiosignaler om sin position.
3.7 SignaturerFarkosten skall i möjligaste mån göras så tyst som möjligt för ett minska röjningsrisken. Framdrivningssystemet får ej bullra eller vibrera så att den avslöjar sin position och kavitation i propellern skall undvikas. Akustisk kommunikation och aktiva sonarer skall bara användas då uppdraget kräver det.
3.8 TillgänglighetVid valet av energisystem skall hänsyn tagas så att en rimlig ladd- eller bunkringstid uppnås. Bränslen och eventuella oxidanter ska vara kommersiellt gångbara. Reservdelar och komponenter till AUV:n skall gå att införskaffa inom rimlig tid.
• 99 av 100 uppdrag skall lyckas• Max 1 av 1000 uppdrag där farkosten förloras
3.9 KostnadEnergisystemens kostnad per kWh ska uppskattas och jämföras mot varandra.
13
4 TEORI OCH BERÄKNINGAR
4.1 HydrodynamikFör att kunna uppskatta energiåtgången under ett uppdrag måste hydrodynamiska beräkningar genomföras för att ge ett mått på vilket strömningsmotstånd farkosten måste övervinna i vattnet. Motståndet kan delas upp i formmotstånd och friktionsmotstånd och det finns ett flertal sätt att utföra beräkningarna. Formmotståndet baseras på farkostens form och en strömlinjeformad laminär kropp ger det lägsta formmotståndet. Friktionsmotståndet beror på den våta ytan som exponeras i vattnet och ska hållas så liten och så slät som möjligt.
Det är svårt att räkna ut ett exakt värde på strömningsmotståndet till en undervattensfarkost med olika geometrier i för och akter och diverse utskjutande komponenter. Roder och propeller kan ge interferenseffekter som är svåra att uppskatta. Strömningen kan slå om från laminär till turbulent strömning och avlösning kan ske som kraftigt ändrar strömningsmotståndet. Beräkningarna bygger på empiriska samband och kan i varje fall sägas ge ett bra utgångsläge att dimensionera energisystemet.
4.1.1 SkrovformFarkostens skrov består av två delar, tryckskrov och formskrov. Tryckskrovets storlek bestäms av de ingående komponenterna och dykdjupet. Tryckskrovets vikt och storlek ökar snabbt med ett ökande dykdjup och detta tar plats för den övriga utrustningen.
Formskrovet är till för att skydda utrustning som t ex sonarer och att ge farkosten en fördelaktig hydrodynamisk form. Den mest fördelaktiga formen strömningstekniskt sätt är en strömlinjeformad kropp där längd-breddförhållandet är ca 6:1.
4.1.1.1 Skrovform anpassad för laminär strömningDen ideala formen ur strömningssynpunkt är den kroppsform där fluiden strömmar laminärt längs ytan, se Figur 9. Den ger ett lågt strömningsmotstånd men är känslig för störningar. Störs den laminära strömningen kan detta leda till avlösning på grund av för stora tryckgradienter i strömningsfältet. Uppkommer avlösning kan det resultera i ett kraftigt ökat strömningsmotstånd. Det går ej att montera främre roder på en AUV med denna typ av skrovform då de kan störa det känsliga strömningsfältet. Farkosten blir svår att anpassa och förlänga eftersom en mittsektion ej kan infogas utan att störa den laminärt utformade strömningskroppen. Den är också känslig för repor och defekter i formskrovet och mot beväxning av marina organismer.
Figur 9. Exempel på kroppsform anpassad för laminär strömning
14
4.1.1.2 TorpedkroppsformTorpedkroppsformen består av en halvelliptisk front och en cylindrisk mittensektion med en avsmalnande konisk akter. Med en torpedkroppsform ökar strömningsmotståndet med ca 30 % jämfört med den laminära kroppsformen med samma storlek men ger flera arrangemangsmässiga och tillverkningstekniska fördelar. Det går att utnyttja volymerna inne i farkosten på ett effektivare sätt och modulariteten förbättras jämfört med den laminära kroppsformen. En mittsektion kan enkelt monteras utan att strömningsmotståndet ökar nämnvärt och den är mindre känslig mot defekter och skador i formskrovet. Torpedkroppsformen är också bättre ur hanteringssynpunkt när farkosten skall sjösättas eller dockas mot en ubåt.
Figur 10. Torpedkroppsform
4.1.2 Vald kroppsformI denna studie kommer arrangemangsstrukturen och strömningsberäkningarna baseras på en torpedkropp då den totalt sett anses vara den mest fördelaktiga. När hänsyn tagits till torpedtubens geometriska form finns det inte många andra möjligheter än en cylindrisk geometri med bra hydrodynamiska egenskaper. Denna kroppsform får sägas vara en bra avvägning mellan tillgängligt utrymme, arrangemangsstruktur och hydrodynamik (se Bilaga 2).
Figur 11. Vald skrovform
15
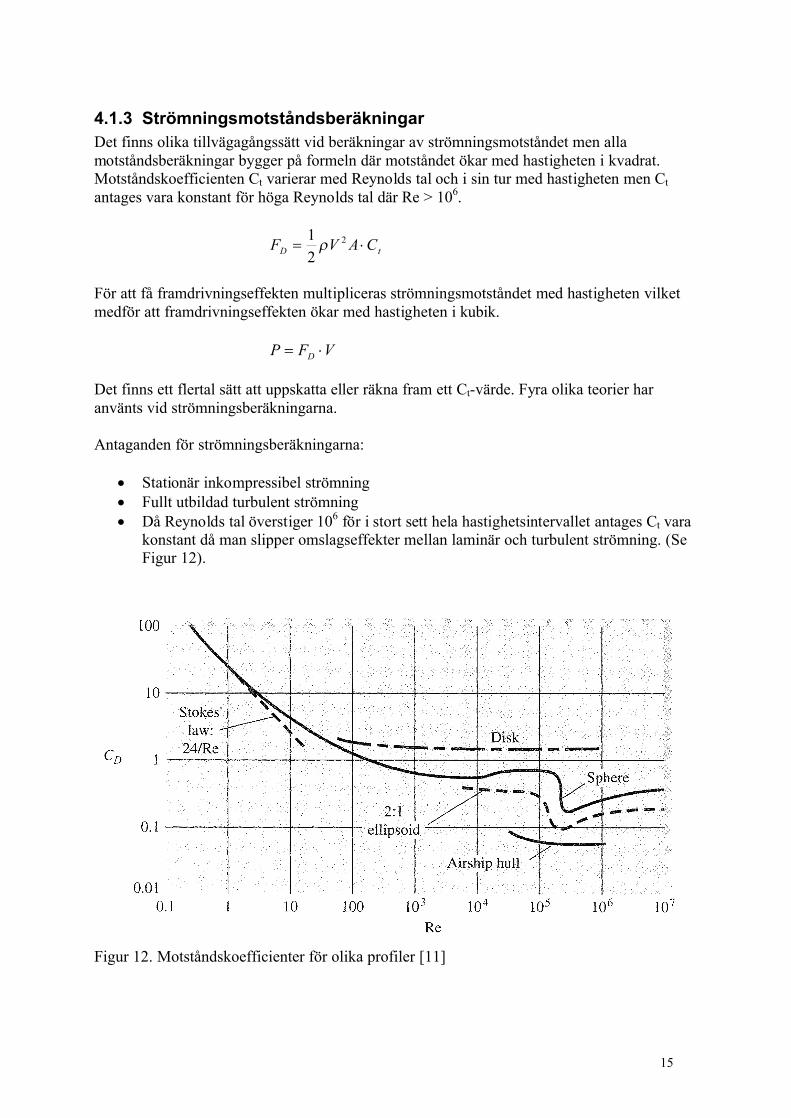
4.1.3 StrömningsmotståndsberäkningarDet finns olika tillvägagångssätt vid beräkningar av strömningsmotståndet men alla motståndsberäkningar bygger på formeln där motståndet ökar med hastigheten i kvadrat. Motståndskoefficienten Ct varierar med Reynolds tal och i sin tur med hastigheten men Ctantages vara konstant för höga Reynolds tal där Re > 106.
tD CAVF ⋅= 2
21 ρ
För att få framdrivningseffekten multipliceras strömningsmotståndet med hastigheten vilket medför att framdrivningseffekten ökar med hastigheten i kubik.
VFP D ⋅=
Det finns ett flertal sätt att uppskatta eller räkna fram ett Ct-värde. Fyra olika teorier har använts vid strömningsberäkningarna.
Antaganden för strömningsberäkningarna:
• Stationär inkompressibel strömning• Fullt utbildad turbulent strömning• Då Reynolds tal överstiger 106 för i stort sett hela hastighetsintervallet antages Ct vara
konstant då man slipper omslagseffekter mellan laminär och turbulent strömning. (SeFigur 12).
Figur 12. Motståndskoefficienter för olika profiler [11]
16
4.1.3.1 Submersible Vehicle Systems Design (SVSD)Den första och andra teorin är en förenklad variant som baseras på parameterstudier på tidigare undervattensfarkoster och har hämtats från Submersible Vehicle Systems Design. Empiriska formler för strömningsmotståndet har framtagits baserade på erfarenheter från mätningar på befintliga undervattensfarkoster. En motståndskoefficient Cf räknas ut med hjälp av Reynolds tal och sedan räknas en ny koefficient ut där man har vägt in antingen farkostens frontyta eller farkostens våta yta, Ct, front eller Ct, wet. Detta Ct är det totala som innehåller både form- och friktionsmotstånd. [12]
µρdV
=Re
2)2Re(log075.0
−=fC
+
+
=
2
, 215.43Ld
Ld
dLCC fwett
+
+=
323
, 75.11Ld
LdCC ffrontt
4.1.3.2 White och HoernerDen tredje teorin grundas på ett känt Ct som baseras på frontytan. Ct finns som tabellvärde för olika tredimensionella profiler. För en torpedkroppsform varierar Ct starkt med längd/breddförhållandet. Det ideala L/B-förhållandet är ca 6:1. AUV:ns L/B-förhållande i denna studie är 4.6 vilket får anses vara ett hyggligt värde ur strömningssynpunkt. Två kroppar med liknande geometri har jämförts i White och Hoerner och ett värde för AUV:n har sedan interpolerats fram. I detta fall är Ct= 0.12 och baseras på farkostens frontarea. [12, 13]
4.1.3.3 SSPADen fjärde teorin baseras på modellförsök som gjorts av SSPA, Statens Skeppsprovningsanstalt i Göteborg. Ct-värden har tagits fram experimentellt genom släpförsök av modeller i en bassäng. Kroppen släpas med olika hastigheter i undervattensläge i en bassäng medan motståndskraften mäts. Två släpförsök har studerats för kroppar med torpedform. Ett Ct-värde har sedan interpolerats fram för att få fram ett Ct-värde för AUV:ns L/B-förhållande. [14]
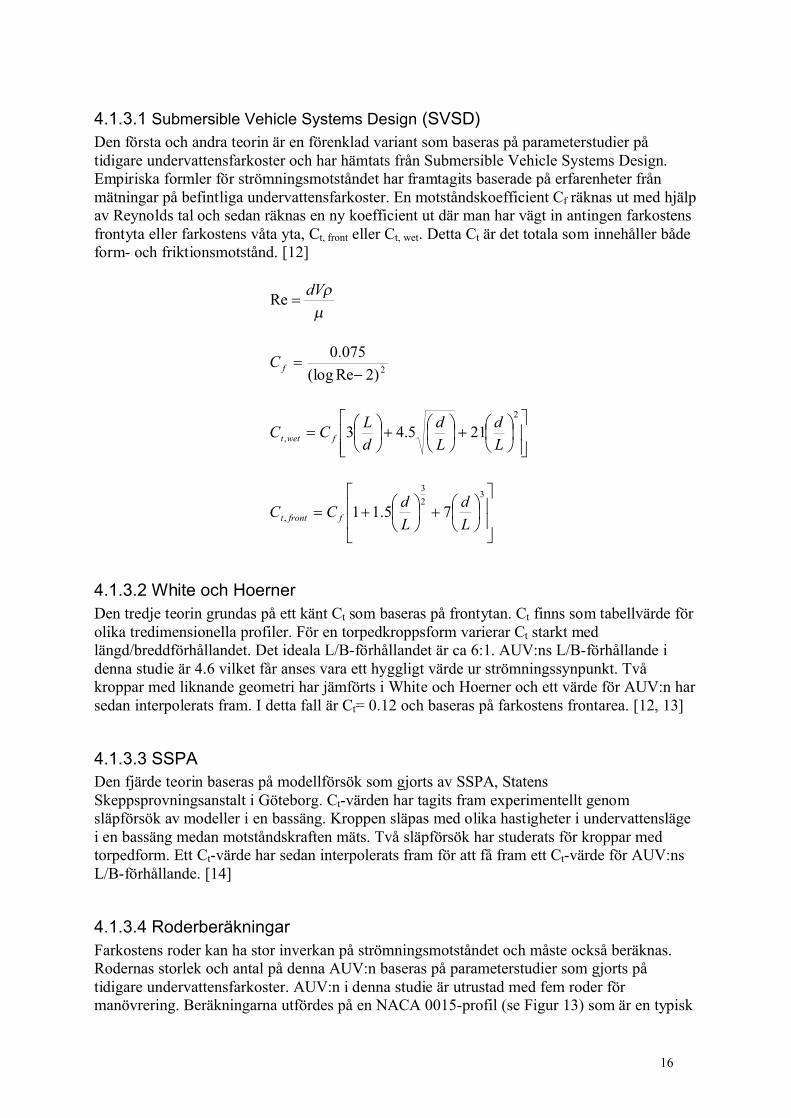
4.1.3.4 RoderberäkningarFarkostens roder kan ha stor inverkan på strömningsmotståndet och måste också beräknas. Rodernas storlek och antal på denna AUV:n baseras på parameterstudier som gjorts på tidigare undervattensfarkoster. AUV:n i denna studie är utrustad med fem roder förmanövrering. Beräkningarna utfördes på en NACA 0015-profil (se Figur 13) som är en typisk
17
roderform med ett CT-värde på 0.012. Vid roderberäkningar måste man ta hänsyn till de interferenseffekter som uppstår mellan roder och skrovkroppen. Interferenseffekterna är komplicerade att beräkna. I detta fall sätts interferensfaktorn till en faktor två som anses vara ett verifierat värde i strömningsberäkningar av roder. [16, 17]
Figur 13. Strömningskaraktäristik för en NACA 0015-profil [15]
4.1.3.5 PropellerverkningsgradEn propeller med fyra blad har använts i studien för att undvika interferenseffekter med de tre aktra roderna. Verkningsgraden för propellern ηprop varierar mellan 0.69 och 0.75 i hastighetsfältet och värdena baseras på tidigare studier som gjorts på ubåtspropellrar på Kockums AB. [16]
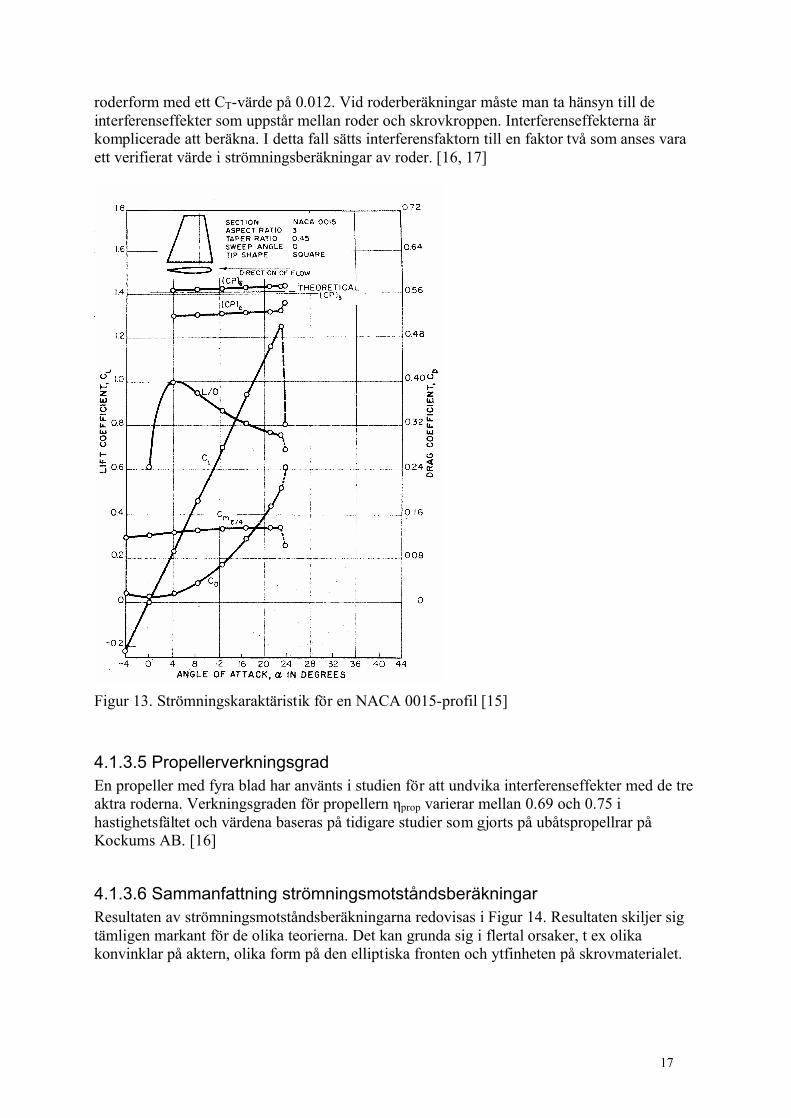
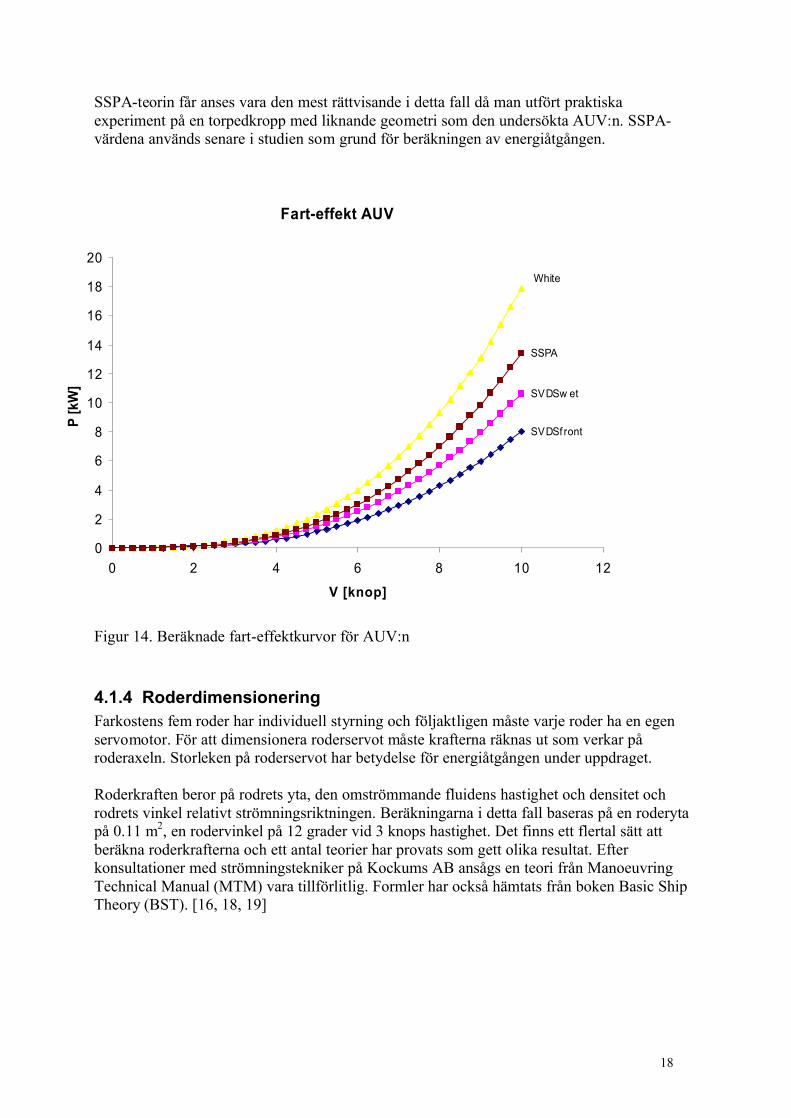
4.1.3.6 Sammanfattning strömningsmotståndsberäkningarResultaten av strömningsmotståndsberäkningarna redovisas i Figur 14. Resultaten skiljer sig tämligen markant för de olika teorierna. Det kan grunda sig i flertal orsaker, t ex olika konvinklar på aktern, olika form på den elliptiska fronten och ytfinheten på skrovmaterialet.
18
SSPA-teorin får anses vara den mest rättvisande i detta fall då man utfört praktiska experiment på en torpedkropp med liknande geometri som den undersökta AUV:n. SSPA-värdena används senare i studien som grund för beräkningen av energiåtgången.
Figur 14. Beräknade fart-effektkurvor för AUV:n
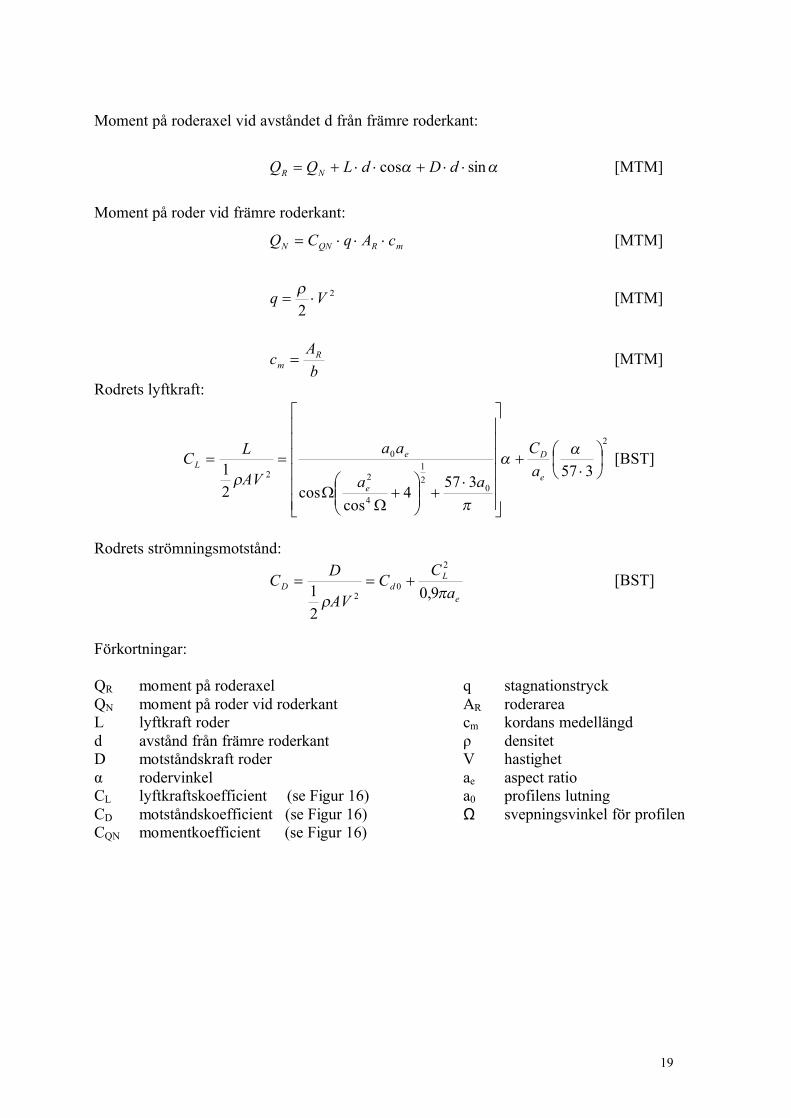
4.1.4 RoderdimensioneringFarkostens fem roder har individuell styrning och följaktligen måste varje roder ha en egen servomotor. För att dimensionera roderservot måste krafterna räknas ut som verkar på roderaxeln. Storleken på roderservot har betydelse för energiåtgången under uppdraget.
Roderkraften beror på rodrets yta, den omströmmande fluidens hastighet och densitet och rodrets vinkel relativt strömningsriktningen. Beräkningarna i detta fall baseras på en roderyta på 0.11 m2, en rodervinkel på 12 grader vid 3 knops hastighet. Det finns ett flertal sätt att beräkna roderkrafterna och ett antal teorier har provats som gett olika resultat. Efter konsultationer med strömningstekniker på Kockums AB ansågs en teori från Manoeuvring Technical Manual (MTM) vara tillförlitlig. Formler har också hämtats från boken Basic Ship Theory (BST). [16, 18, 19]
Fart-effekt AUV
SVDSf ront
SVDSw et
White
SSPA
0
2
4
6
8
10
12
14
16
18
20
0 2 4 6 8 10 12
V [knop]
P [k
W]
19
Moment på roderaxel vid avståndet d från främre roderkant:
αα sincos ⋅⋅+⋅⋅+= dDdLQQ NR [MTM]
Moment på roder vid främre roderkant:
mRQNN cAqCQ ⋅⋅⋅= [MTM]
2
2Vq ⋅=
ρ [MTM]
bAc R
m = [MTM]
Rodrets lyftkraft:
2
021
4
2
0
2 357357
4cos
cos21
⋅+
⋅+
+
ΩΩ
==αα
π
ρ e
D
e
eL a
C
aa
aa
AV
LC [BST]
Rodrets strömningsmotstånd:
e
LdD a
CCAV
DCπρ 9,0
21
2
02
+== [BST]
Förkortningar:
QR moment på roderaxel q stagnationstryckQN moment på roder vid roderkant AR roderareaL lyftkraft roder cm kordans medellängdd avstånd från främre roderkant ρ densitetD motståndskraft roder V hastighetα rodervinkel ae aspect ratioCL lyftkraftskoefficient (se Figur 16) a0 profilens lutningCD motståndskoefficient (se Figur 16) Ω svepningsvinkel för profilenCQN momentkoefficient (se Figur 16)
20
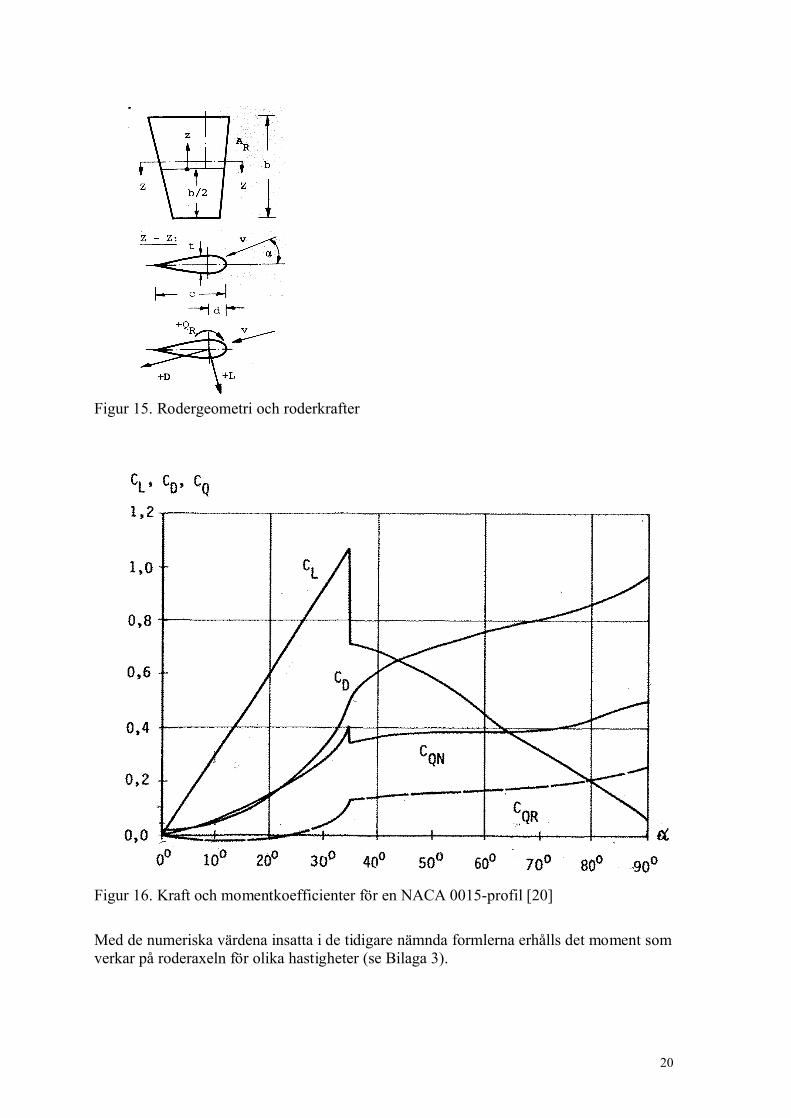
Figur 15. Rodergeometri och roderkrafter
Figur 16. Kraft och momentkoefficienter för en NACA 0015-profil [20]
Med de numeriska värdena insatta i de tidigare nämnda formlerna erhålls det moment som verkar på roderaxeln för olika hastigheter (se Bilaga 3).
21
Momentet varierar mellan 0 och 26 Nm i hastighetsintervallet. Då farkosten mestadels ska framdrivas i modesta hastigheter används en Alstom servomotor som kan leverera 61 Nm vid 200 W effekt. Motorn är speciellt framtagen för undervattensbruk och klarar ett dykdjup på 3 000 meter. [21]
Med antagandet att farkosten skall framdrivas med medelhastigheten 4 knop under ett uppdrag ger detta en effekt på 37 W per servomotor. Nyttjandegraden för servomotorerna antages vara 10 % av den totala driftstiden. Antagandet baseras på uppmätta värden för ubåt med kryssroder. [15, 18, 19, 22]
För exakta numeriska värden se Bilaga 3.
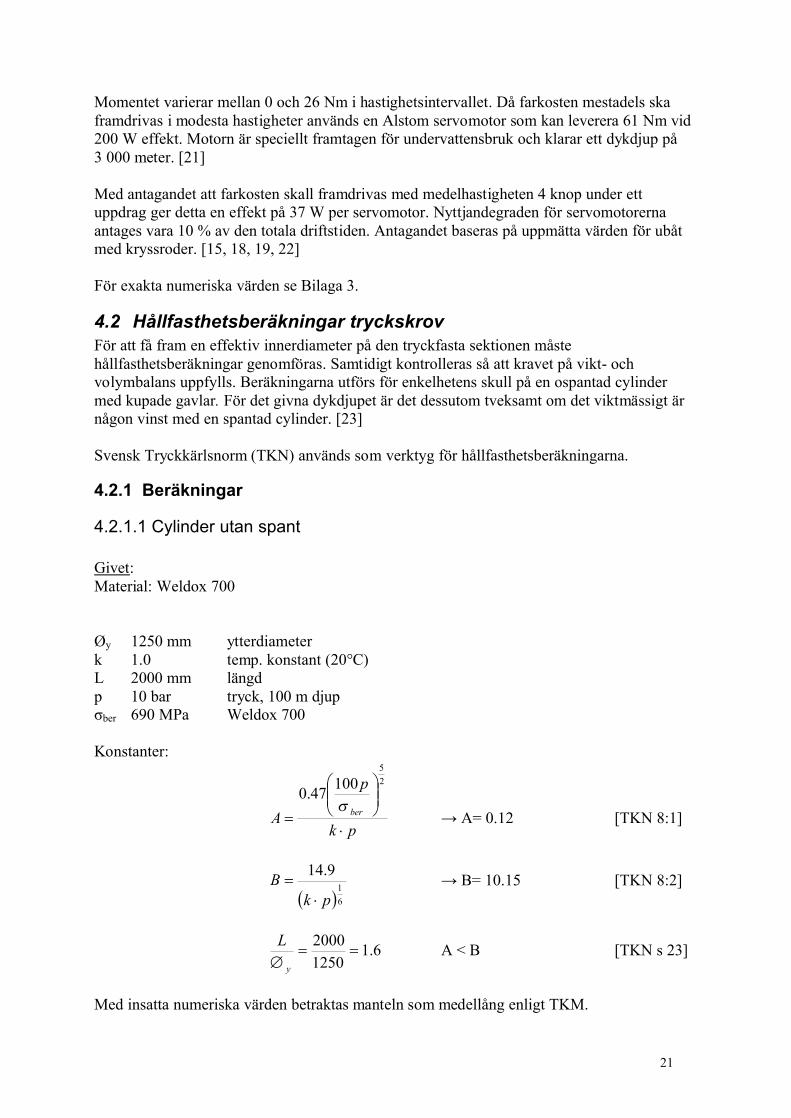
4.2 Hållfasthetsberäkningar tryckskrovFör att få fram en effektiv innerdiameter på den tryckfasta sektionen måste hållfasthetsberäkningar genomföras. Samtidigt kontrolleras så att kravet på vikt- och volymbalans uppfylls. Beräkningarna utförs för enkelhetens skull på en ospantad cylinder med kupade gavlar. För det givna dykdjupet är det dessutom tveksamt om det viktmässigt är någon vinst med en spantad cylinder. [23]
Svensk Tryckkärlsnorm (TKN) används som verktyg för hållfasthetsberäkningarna.
4.2.1 Beräkningar
4.2.1.1 Cylinder utan spant
Givet:Material: Weldox 700
Øy 1250 mm ytterdiameterk 1.0 temp. konstant (20°C)L 2000 mm längdp 10 bar tryck, 100 m djupσber 690 MPa Weldox 700
Konstanter:
pk
p
A ber
⋅
=
25
10047.0σ
→ A= 0.12 [TKN 8:1]
( )61
9.14
pkB
⋅= → B= 10.15 [TKN 8:2]
6.112502000
==∅ y
L A < B [TKN s 23]
Med insatta numeriska värden betraktas manteln som medellång enligt TKM.
22
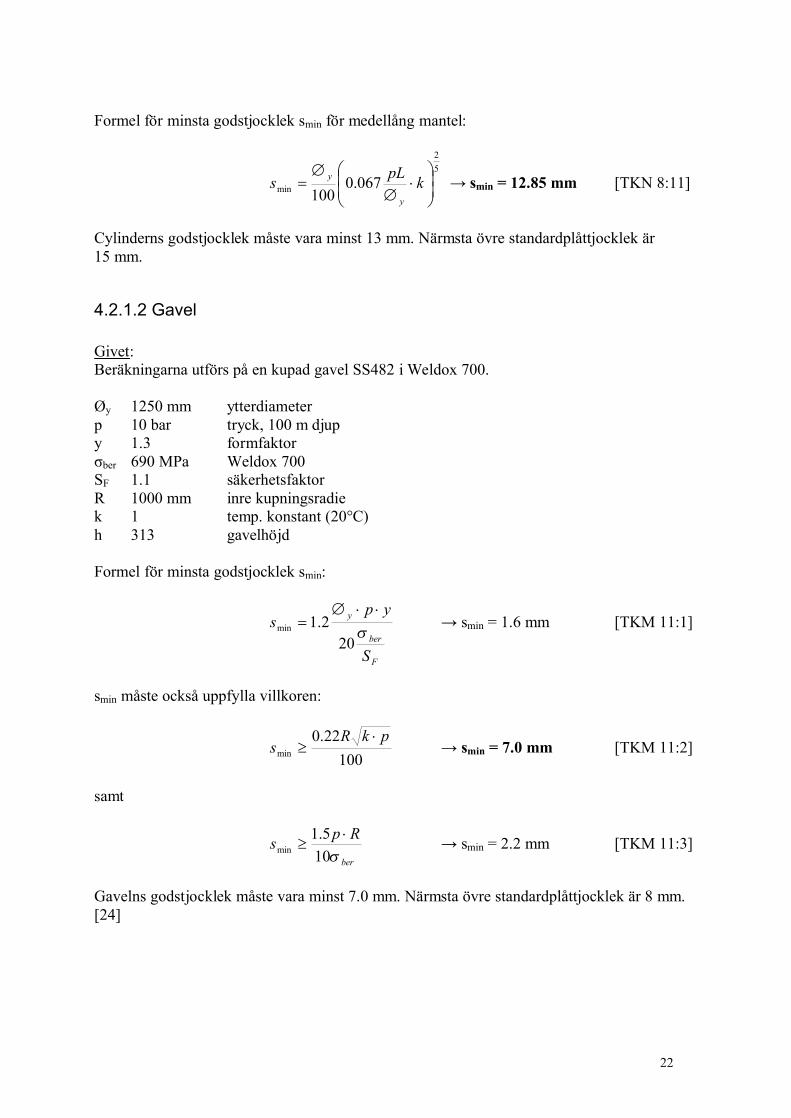
Formel för minsta godstjocklek smin för medellång mantel:
52
min 067.0100
⋅
∅
∅= kpLs
y
y → smin = 12.85 mm [TKN 8:11]
Cylinderns godstjocklek måste vara minst 13 mm. Närmsta övre standardplåttjocklek är 15 mm.
4.2.1.2 Gavel
Givet:Beräkningarna utförs på en kupad gavel SS482 i Weldox 700.
Øy 1250 mm ytterdiameterp 10 bar tryck, 100 m djupy 1.3 formfaktorσber 690 MPa Weldox 700SF 1.1 säkerhetsfaktorR 1000 mm inre kupningsradiek 1 temp. konstant (20°C)h 313 gavelhöjd
Formel för minsta godstjocklek smin:
F
ber
y
S
yps
σ20
2.1min
⋅⋅∅= → smin = 1.6 mm [TKM 11:1]
smin måste också uppfylla villkoren:
10022.0
minpkR
s⋅
≥ → smin = 7.0 mm [TKM 11:2]
samt
ber
Rpsσ10
5.1min
⋅≥ → smin = 2.2 mm [TKM 11:3]
Gavelns godstjocklek måste vara minst 7.0 mm. Närmsta övre standardplåttjocklek är 8 mm.[24]
23
4.2.1.3 Vikt och deplacementMed den givna geometrin på tryckkärlet och de framräknade godstjocklekarna fås en tryckkärlsvikt på 890 kg. Med ett tillägg på 10 % för stag och bäddar erhålls en stålvikt på 980 kg. Tryckkärlet deplacerar 2 240 kg. För att uppnå vikt och volymbalans för tryckkärlsdelen får utrustningen i tryckkärlet inte väga mer än:
2 240-980 = 1 260 kg
Innervolym: 2.07 m3
Innervolym -10 % för stag och bäddar ger 2.07-(2.07*0.1) = 1.865 m3
4.3 Energiåtgång
4.3.1 ScenarioBeräkningarna på energiåtgången för hjälpsystemen och propellermotorn grundar sig på en fiktiv operationsprofil. Framdrivningseffekten och de obligatoriska komponenternas effekt är känd för olika hastigheter vilket gör att en energianvändningsmatris kan upprättas där varje komponents driftstid listas och summeras.
Uppdraget består av att övervaka och dokumentera ett område med hjälp av sensorerna. Informationen loggas på en server ombord på AUV:n som laddas över till moderfarkosten efter avslutat uppdrag.
AUV:n sjösätts från en ubåt i undervattensläge. Innan sjösättning laddas det förprogrammerade uppdraget över till AUV:n. Efter sjösättning testas systemen i närheten av ubåten och kommunikation sker med hjälp av den akustiska länken. Farkosten intar ytläge och färdas en kortare sträcka med skarpa svängar för att kalibrera gyrokompassen. Under denna tid har AUV:n radiokontakt med ubåten. Farkosten dyker sedan och beger sig iväg på sitt uppdrag.
Operationsområdet ligger på ett avstånd av ca 24 nautiska mil och transithastigheten är bestämd till 6 knop. När farkosten närmar sig operationsområdet går den upp för att stämma av sin position med GPS och skickar samtidigt ett radiomeddelande till ubåten om sin position och driftsdata om återstående energimängd, etc.
Farkosten går ner till lämpligt djup och fortsätter in i operationsområdet med hastigheten 3 knop och sonarerna kopplas in för att kartlägga operationsområdet. Efter avslutadövervakning går farkosten upp till ytan och stämmer av positionen mha GPS samt sänder ett radiomeddelande om sin position och att övervakningen är avslutad. AUV:n återvänder till ubåten med en hastighet av 6 knop.
När den närmar sig den förbestämda mötesplatsen går den återigen upp till ytan och stämmer av sin position med GPS. Efter att positionen är känd bestäms en mötesplats med ubåten och farkosten går ner till ett förutbestämt djup. Den akustiska länken återupptas för att kunna styra in AUV:n mot ubåten för dockning. Farkostens loggade information laddas över till ubåten och uppdraget är avslutat. [10]
En energibehovssimulering har genomförts i form av en matris i ett excel-dokument. Varje komponent och dess effekt listas upp och den tid den är i drift (anpassat efter
24
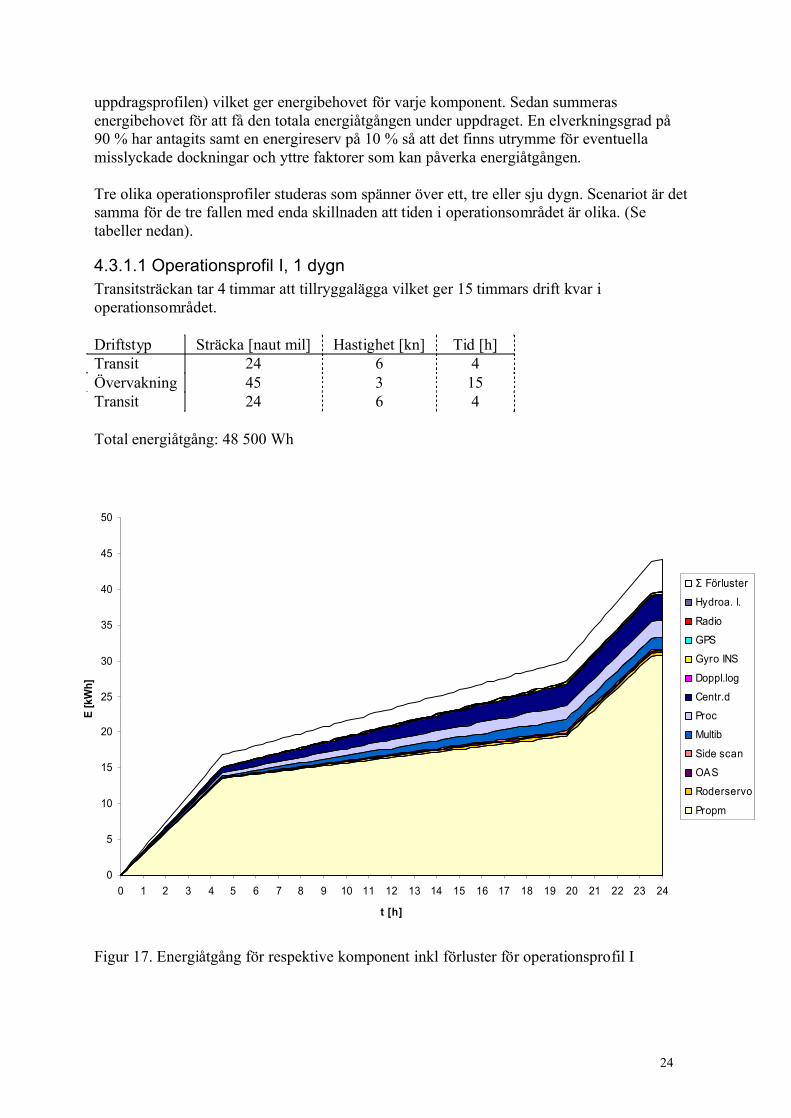
uppdragsprofilen) vilket ger energibehovet för varje komponent. Sedan summeras energibehovet för att få den totala energiåtgången under uppdraget. En elverkningsgrad på 90 % har antagits samt en energireserv på 10 % så att det finns utrymme för eventuella misslyckade dockningar och yttre faktorer som kan påverka energiåtgången.
Tre olika operationsprofiler studeras som spänner över ett, tre eller sju dygn. Scenariot är det samma för de tre fallen med enda skillnaden att tiden i operationsområdet är olika. (Se tabeller nedan).
4.3.1.1 Operationsprofil I, 1 dygnTransitsträckan tar 4 timmar att tillryggalägga vilket ger 15 timmars drift kvar i operationsområdet.
Driftstyp Sträcka [naut mil] Hastighet [kn] Tid [h]Transit 24 6 4Övervakning 45 3 15Transit 24 6 4
Total energiåtgång: 48 500 Wh
Figur 17. Energiåtgång för respektive komponent inkl förluster för operationsprofil I
0
5
10
15
20
25
30
35
40
45
50
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24
t [h]
E [k
Wh]
Σ Förluster
Hydroa. l.
Radio
GPS
Gyro INS
Doppl.log
Centr.d
Proc
Multib
Side scan
OAS
Roderservo
Propm
25
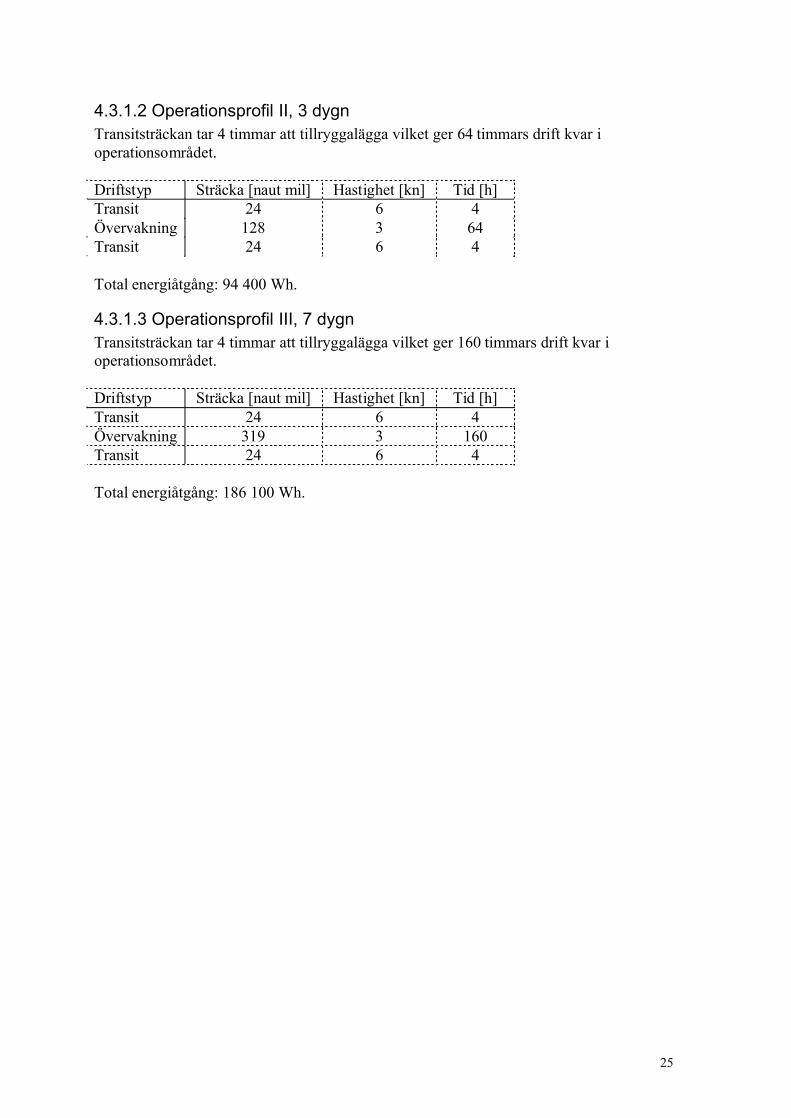
4.3.1.2 Operationsprofil II, 3 dygnTransitsträckan tar 4 timmar att tillryggalägga vilket ger 64 timmars drift kvar i operationsområdet.
Driftstyp Sträcka [naut mil] Hastighet [kn] Tid [h]Transit 24 6 4Övervakning 128 3 64Transit 24 6 4
Total energiåtgång: 94 400 Wh.
4.3.1.3 Operationsprofil III, 7 dygnTransitsträckan tar 4 timmar att tillryggalägga vilket ger 160 timmars drift kvar i operationsområdet.
Driftstyp Sträcka [naut mil] Hastighet [kn] Tid [h]Transit 24 6 4Övervakning 319 3 160Transit 24 6 4
Total energiåtgång: 186 100 Wh.
26
4.4 Energianalys
4.4.1 BatterierBatterier har utan tvekan hittills varit den vanligaste energikällan för AUV:er. I ensammanställning av 61 utvecklade AUV:er var 53 stycken av dessa batteridrivna av antingen primär- eller sekundärceller. [2]
På senare tid har ett flertal batterityper med hög energitäthet utvecklats om man jämför med det beprövade blybatteriet som tidigare dominerat energilagringen för undervattensfarkoster. Kravet på lätta och energitäta batterier till bärbar utrustning som datorer och mobiltelefoner samt elbilsindustrin har drivit marknaden att utveckla nya batterier. Detta har resulterat i att t ex litiumbatterierna har fått en stor marknad i hemelektronikprodukter och även i större applikationer som energikälla till elbilar och i nödkraftsaggregat.
Batterier kan indelas i grupperna primärbatterier och sekundärbatterier (uppladdningsbara)batterier. De har gemensamt att kemisk energi som är bunden i olika metallföreningar omvandlas till elektrisk energi. I studien beskrivs ett antal batterityper översiktligt vad avser deras funktion och prestanda.
Studien gör inte anspråk på en total genomgång av samtliga batterityper och dess prestanda utan här redovisas ett antal olika batterityper som skulle kunna passa i en AUV-applikation.Tyngdpunkten har lagts på sekundärbatterier.
De uppladdningsbara batteriernas livslängd och prestanda är beroende av hur de hanteras under drift och vilken temperatur de verkar i. En snabb urladdning liksom en hög driftstemperatur påverkar livslängden negativt för batterierna. En låg driftstemperatur orsakar en prestandaförsämring för de flesta batterityper.
Farkosten ska kunna färdas i kalla vatten vilket kan ge upphov till låga temperaturer (nära fryspunkten) i AUV:n. Farkostens kringsystem använder dock energi och det är rimligt antagande att en stor del av denna energi omvandlas till värme. Detta kommer att ha en uppvärmande effekt på AUV:n. Det torde alltså ej vara någon risk för prestandaförsämring hos batterierna pga. för låg driftstemperatur. Opererar farkosten däremot i varma vatten kan det mycket väl resultera i ett visst kylbehov för att batterierna och andra system inte skall påverkas negativt.
27
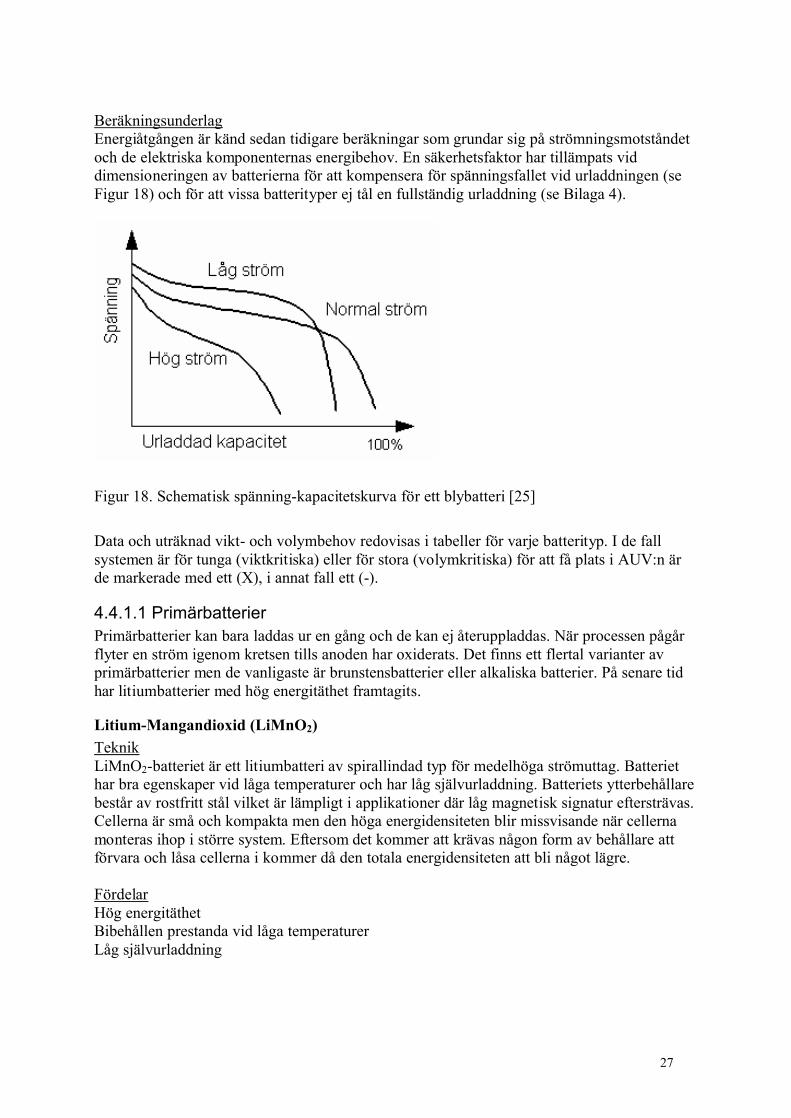
BeräkningsunderlagEnergiåtgången är känd sedan tidigare beräkningar som grundar sig på strömningsmotståndet och de elektriska komponenternas energibehov. En säkerhetsfaktor har tillämpats vid dimensioneringen av batterierna för att kompensera för spänningsfallet vid urladdningen (se Figur 18) och för att vissa batterityper ej tål en fullständig urladdning (se Bilaga 4).
Figur 18. Schematisk spänning-kapacitetskurva för ett blybatteri [25]
Data och uträknad vikt- och volymbehov redovisas i tabeller för varje batterityp. I de fall systemen är för tunga (viktkritiska) eller för stora (volymkritiska) för att få plats i AUV:n är de markerade med ett (X), i annat fall ett (-).
4.4.1.1 PrimärbatterierPrimärbatterier kan bara laddas ur en gång och de kan ej återuppladdas. När processen pågår flyter en ström igenom kretsen tills anoden har oxiderats. Det finns ett flertal varianter av primärbatterier men de vanligaste är brunstensbatterier eller alkaliska batterier. På senare tid har litiumbatterier med hög energitäthet framtagits.
Litium-Mangandioxid (LiMnO2)TeknikLiMnO2-batteriet är ett litiumbatteri av spirallindad typ för medelhöga strömuttag. Batteriet har bra egenskaper vid låga temperaturer och har låg självurladdning. Batteriets ytterbehållare består av rostfritt stål vilket är lämpligt i applikationer där låg magnetisk signatur eftersträvas. Cellerna är små och kompakta men den höga energidensiteten blir missvisande när cellerna monteras ihop i större system. Eftersom det kommer att krävas någon form av behållare att förvara och låsa cellerna i kommer då den totala energidensiteten att bli något lägre.
FördelarHög energitäthetBibehållen prestanda vid låga temperaturerLåg självurladdning
28
NackdelarEngångsbatteri[26]
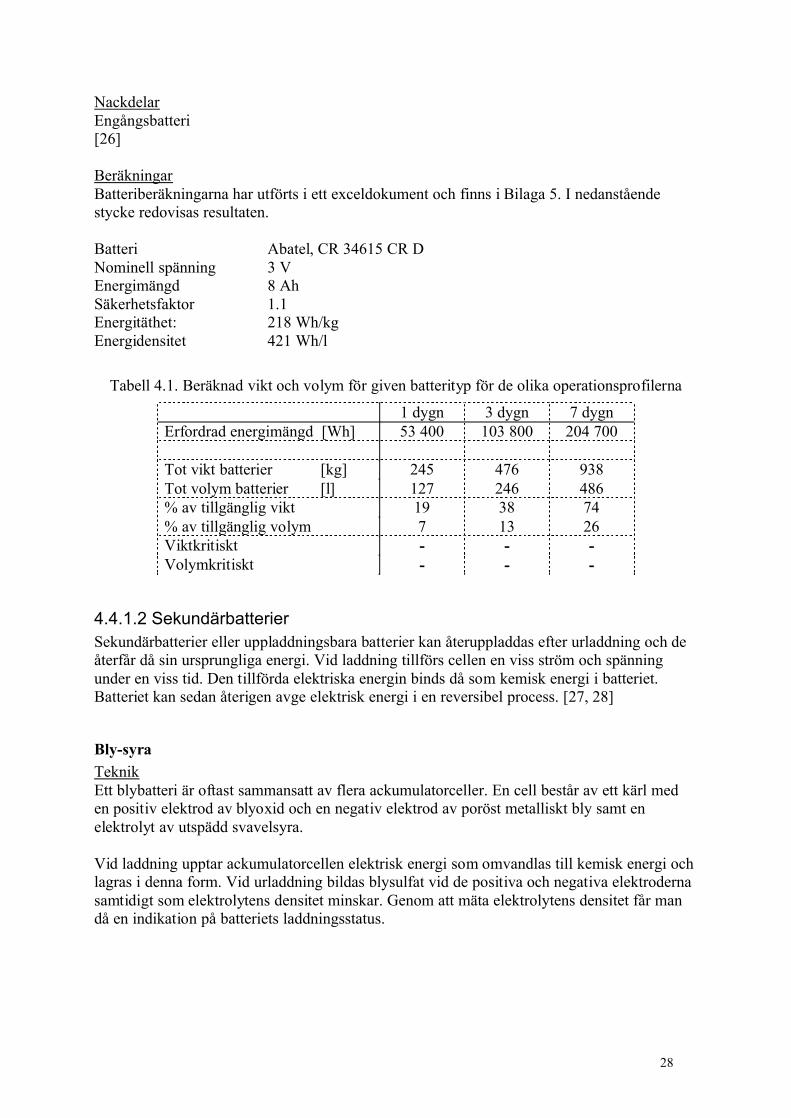
BeräkningarBatteriberäkningarna har utförts i ett exceldokument och finns i Bilaga 5. I nedanstående stycke redovisas resultaten.
Batteri Abatel, CR 34615 CR DNominell spänning 3 VEnergimängd 8 AhSäkerhetsfaktor 1.1Energitäthet: 218 Wh/kgEnergidensitet 421 Wh/l
Tabell 4.1. Beräknad vikt och volym för given batterityp för de olika operationsprofilerna
1 dygn 3 dygn 7 dygnErfordrad energimängd [Wh] 53 400 103 800 204 700
Tot vikt batterier [kg] 245 476 938Tot volym batterier [l] 127 246 486% av tillgänglig vikt 19 38 74% av tillgänglig volym 7 13 26Viktkritiskt - - -Volymkritiskt - - -
4.4.1.2 SekundärbatterierSekundärbatterier eller uppladdningsbara batterier kan återuppladdas efter urladdning och deåterfår då sin ursprungliga energi. Vid laddning tillförs cellen en viss ström och spänning under en viss tid. Den tillförda elektriska energin binds då som kemisk energi i batteriet. Batteriet kan sedan återigen avge elektrisk energi i en reversibel process. [27, 28]
Bly-syraTeknikEtt blybatteri är oftast sammansatt av flera ackumulatorceller. En cell består av ett kärl med en positiv elektrod av blyoxid och en negativ elektrod av poröst metalliskt bly samt en elektrolyt av utspädd svavelsyra.
Vid laddning upptar ackumulatorcellen elektrisk energi som omvandlas till kemisk energi och lagras i denna form. Vid urladdning bildas blysulfat vid de positiva och negativa elektroderna samtidigt som elektrolytens densitet minskar. Genom att mäta elektrolytens densitet får man då en indikation på batteriets laddningsstatus.

29
Blybatteriet kräver ett visst underhåll för att inte självurladdas. Står batteriet oanvänt för länge bildas skadligt stora kristaller av blysulfat som ej försvinner vid laddning. Batteriet är även temperaturkänsligt. Vid låga temperaturer minskar det möjliga energiurtaget ur batteriet och vid höga temperaturer minskar batteriets livslängd. En bra arbetstemperatur för blybatteriet är 30°C.
På senare tid har underhållsfria ventilreglerade blybatterier framtagits där elektrolyten ej behöver kontrolleras. Elektrolyten kan vara absorberad i en separator av mikroporös glasfiberull. Kemikalier kan också tillsättas för att binda elektrolyten i gel-form vilket gör batteriet lägesoberoende. Dessa typer av batterier är dock känsligare mot störningar under laddningsfasen.
Blybatterier har en energitäthet på ca 30 – 50 Wh/kg vilket baseras på en urladdning under lång tid, > 5 timmar. Ubåtsbatterier har en något högre energitäthet, ca 50 Wh/kg och ca 145 Wh/l. [27, 29]
Batteriets livslängd är beroende på hur djupt batteriet laddas ur i varje cykel, se Figur 19.
Figur 19. Livslängd för ett blybatteri vid olika urladdningsfall [30]
FördelarKänd beprövad teknikLåg kostnadLång livscykel
NackdelarLåg energitäthetMinskad kapacitet vid låga temperaturerVätgasproduktion vid laddning/urladdning
LivslängdCa 300 laddcykler (90 % DoD, Depth of Discharge)[30]

30
BeräkningarBatteriberäkningarna har utförts i ett exceldokument och finns i Bilaga 5. I nedanståendestycke redovisas resultaten.
Batteri CellTech, Leader CT200-12Nominell spänning 12 VEnergimängd 200 AhSäkerhetsfaktor 1.2Energitäthet: 37 Wh/kgEnergidensitet 85 Wh/l
Tabell 4.2. Beräknad vikt och volym för given batterityp för de olika operationsprofilerna
1 dygn 3 dygn 7 dygnErfordrad energimängd [Wh] 58 200 113 300 223 300
Tot vikt batterier [kg] 1 577 3 067 6 048Tot volym batterier [l] 672 1 307 2 578% av tillgänglig vikt 125 243 480% av tillgänglig volym 36 70 138Viktkritiskt X X XVolymkritiskt - - X
Nickel-Kadmium (NiCd)TeknikNiCd-batterier är robusta och har varit vanligt förekommande som batterier i elbilar och i hushållsapparater. Marknaden är dock begränsad och NiCd-batterierna är i dag nästan helt ersatta av nickel/metallhydrid-batterier. Det relativt höga priset för batteriet beror främst på att kostnaden för huvudkomponenten nickel är högt.
FördelarRobustaKan snabbladdasBibehållen prestanda vid låga temperaturerLåg självurladdning
NackdelarDyraLåg energitäthet
LivslängdCa 2 000 laddcykler (80 % DoD)[27, 31]
31
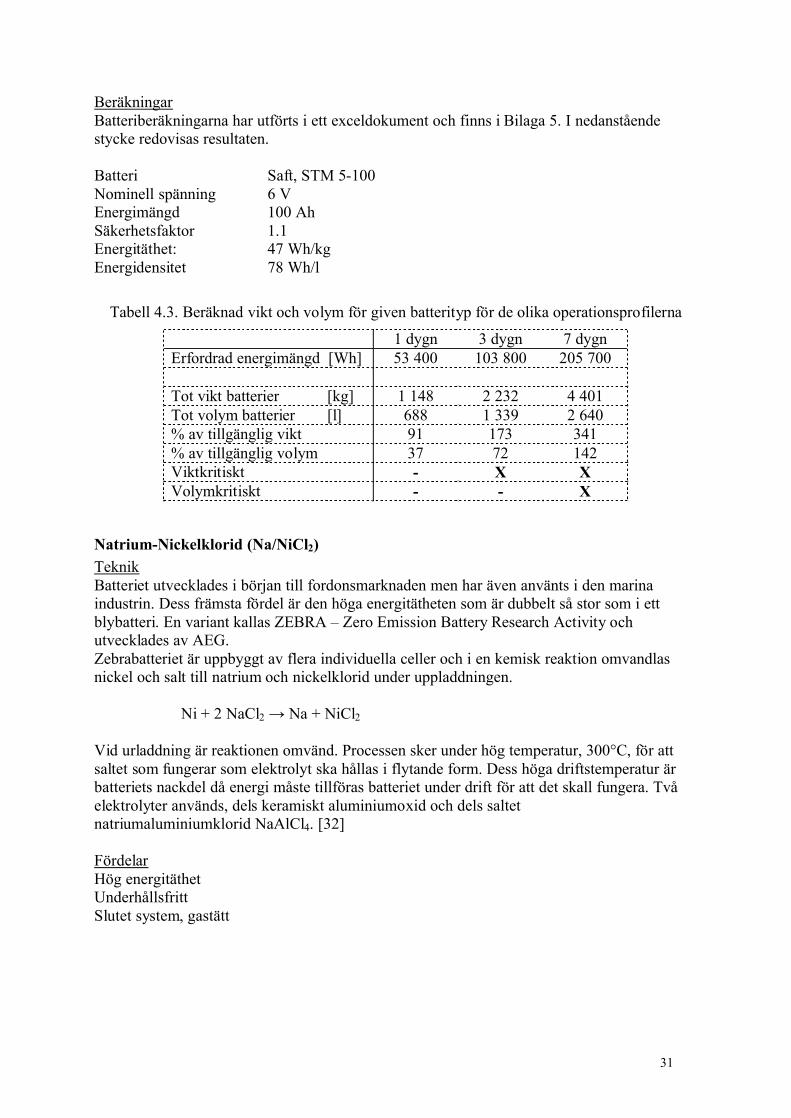
BeräkningarBatteriberäkningarna har utförts i ett exceldokument och finns i Bilaga 5. I nedanstående stycke redovisas resultaten.
Batteri Saft, STM 5-100Nominell spänning 6 VEnergimängd 100 AhSäkerhetsfaktor 1.1Energitäthet: 47 Wh/kgEnergidensitet 78 Wh/l
Tabell 4.3. Beräknad vikt och volym för given batterityp för de olika operationsprofilerna
1 dygn 3 dygn 7 dygnErfordrad energimängd [Wh] 53 400 103 800 205 700
Tot vikt batterier [kg] 1 148 2 232 4 401Tot volym batterier [l] 688 1 339 2 640% av tillgänglig vikt 91 173 341% av tillgänglig volym 37 72 142Viktkritiskt - X XVolymkritiskt - - X
Natrium-Nickelklorid (Na/NiCl2)TeknikBatteriet utvecklades i början till fordonsmarknaden men har även använts i den marina industrin. Dess främsta fördel är den höga energitätheten som är dubbelt så stor som i ett blybatteri. En variant kallas ZEBRA – Zero Emission Battery Research Activity ochutvecklades av AEG. Zebrabatteriet är uppbyggt av flera individuella celler och i en kemisk reaktion omvandlas nickel och salt till natrium och nickelklorid under uppladdningen.
Ni + 2 NaCl2 → Na + NiCl2
Vid urladdning är reaktionen omvänd. Processen sker under hög temperatur, 300°C, för att saltet som fungerar som elektrolyt ska hållas i flytande form. Dess höga driftstemperatur är batteriets nackdel då energi måste tillföras batteriet under drift för att det skall fungera. Två elektrolyter används, dels keramiskt aluminiumoxid och dels saltet natriumaluminiumklorid NaAlCl4. [32]
FördelarHög energitäthetUnderhållsfrittSlutet system, gastätt
32
NackdelarDyraMåste värmas upp vid driftTermiska förlusterSäkerhetsaspekterna måste utredas
LivslängdCa 600 laddcykler (80 % DoD)[33]
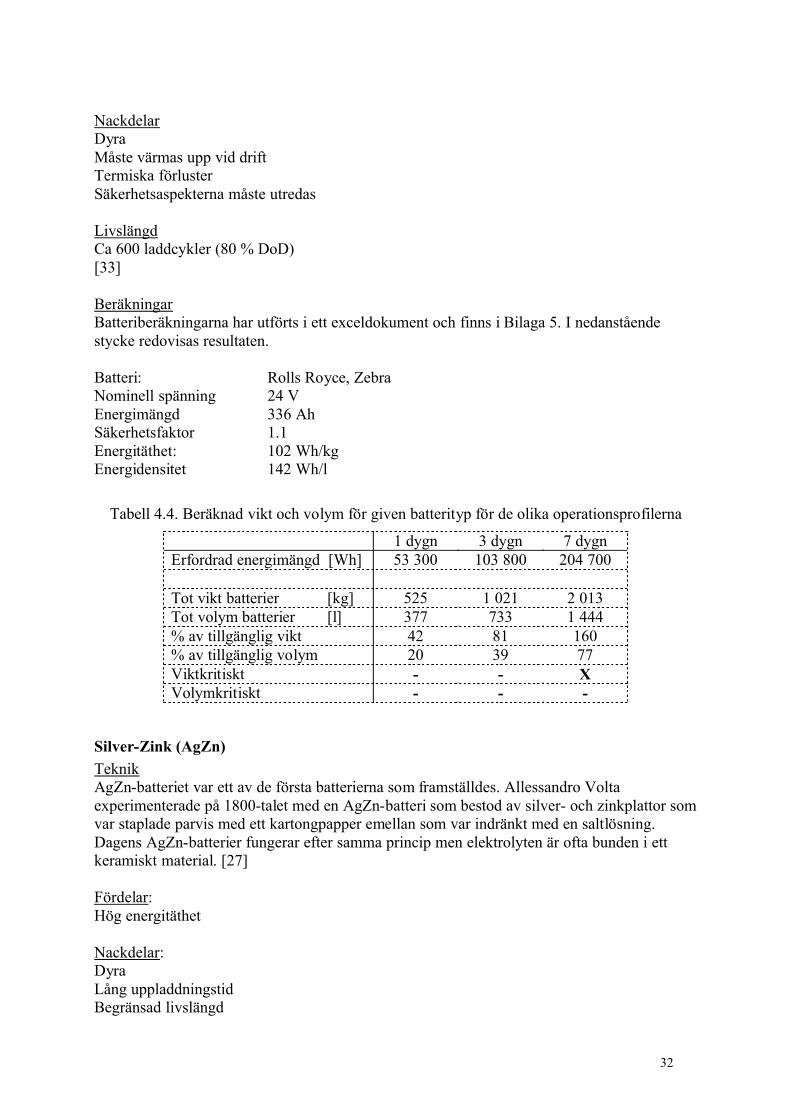
BeräkningarBatteriberäkningarna har utförts i ett exceldokument och finns i Bilaga 5. I nedanstående stycke redovisas resultaten.
Batteri: Rolls Royce, ZebraNominell spänning 24 VEnergimängd 336 AhSäkerhetsfaktor 1.1Energitäthet: 102 Wh/kgEnergidensitet 142 Wh/l
Tabell 4.4. Beräknad vikt och volym för given batterityp för de olika operationsprofilerna
1 dygn 3 dygn 7 dygnErfordrad energimängd [Wh] 53 300 103 800 204 700
Tot vikt batterier [kg] 525 1 021 2 013Tot volym batterier [l] 377 733 1 444% av tillgänglig vikt 42 81 160% av tillgänglig volym 20 39 77Viktkritiskt - - XVolymkritiskt - - -
Silver-Zink (AgZn)TeknikAgZn-batteriet var ett av de första batterierna som framställdes. Allessandro Volta experimenterade på 1800-talet med en AgZn-batteri som bestod av silver- och zinkplattor som var staplade parvis med ett kartongpapper emellan som var indränkt med en saltlösning. Dagens AgZn-batterier fungerar efter samma princip men elektrolyten är ofta bunden i ett keramiskt material. [27]
Fördelar:Hög energitäthet
Nackdelar:DyraLång uppladdningstidBegränsad livslängd
33
LivslängdCa 50 laddcykler (80 % DoD)[31, 34]
BeräkningarBatteriberäkningarna har utförts i ett exceldokument och finns i Bilaga 5. I nedanstående stycke redovisas resultaten.
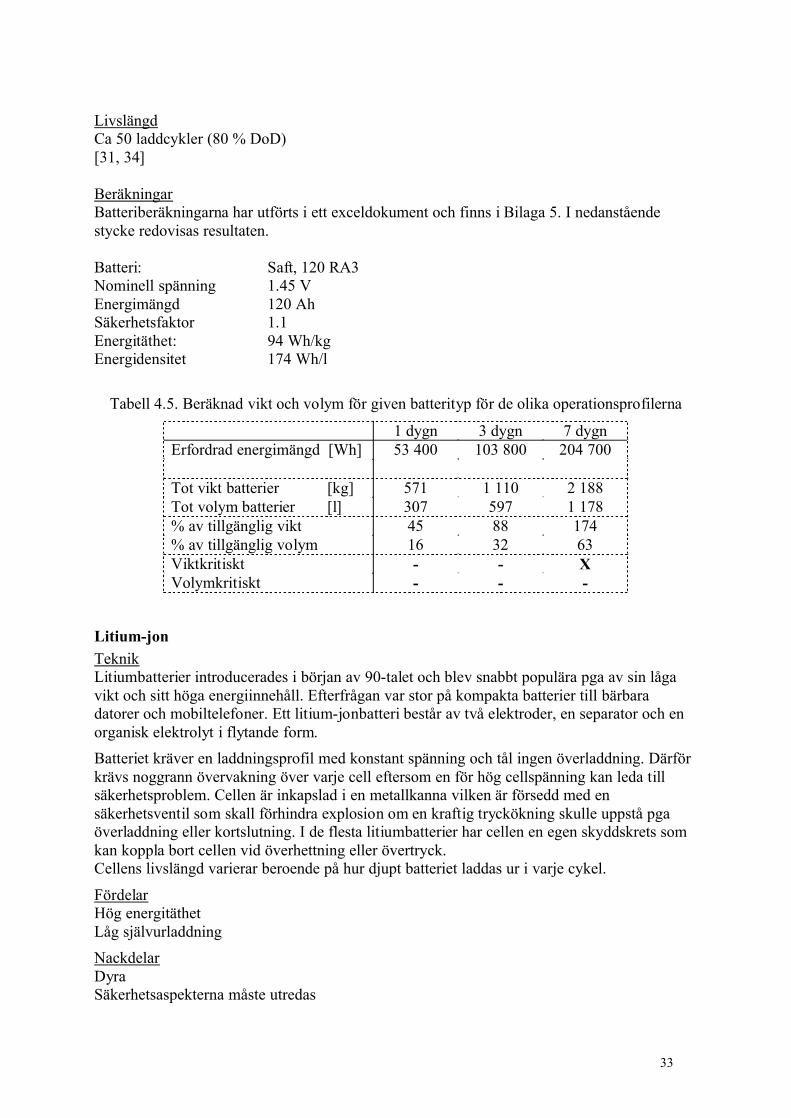
Batteri: Saft, 120 RA3Nominell spänning 1.45 VEnergimängd 120 AhSäkerhetsfaktor 1.1Energitäthet: 94 Wh/kgEnergidensitet 174 Wh/l
Tabell 4.5. Beräknad vikt och volym för given batterityp för de olika operationsprofilerna
1 dygn 3 dygn 7 dygnErfordrad energimängd [Wh] 53 400 103 800 204 700
Tot vikt batterier [kg] 571 1 110 2 188Tot volym batterier [l] 307 597 1 178% av tillgänglig vikt 45 88 174% av tillgänglig volym 16 32 63Viktkritiskt - - XVolymkritiskt - - -
Litium-jonTeknikLitiumbatterier introducerades i början av 90-talet och blev snabbt populära pga av sin låga vikt och sitt höga energiinnehåll. Efterfrågan var stor på kompakta batterier till bärbara datorer och mobiltelefoner. Ett litium-jonbatteri består av två elektroder, en separator och en organisk elektrolyt i flytande form. Batteriet kräver en laddningsprofil med konstant spänning och tål ingen överladdning. Därför krävs noggrann övervakning över varje cell eftersom en för hög cellspänning kan leda till säkerhetsproblem. Cellen är inkapslad i en metallkanna vilken är försedd med en säkerhetsventil som skall förhindra explosion om en kraftig tryckökning skulle uppstå pga överladdning eller kortslutning. I de flesta litiumbatterier har cellen en egen skyddskrets som kan koppla bort cellen vid överhettning eller övertryck.Cellens livslängd varierar beroende på hur djupt batteriet laddas ur i varje cykel.
FördelarHög energitäthetLåg självurladdningNackdelarDyraSäkerhetsaspekterna måste utredas
34
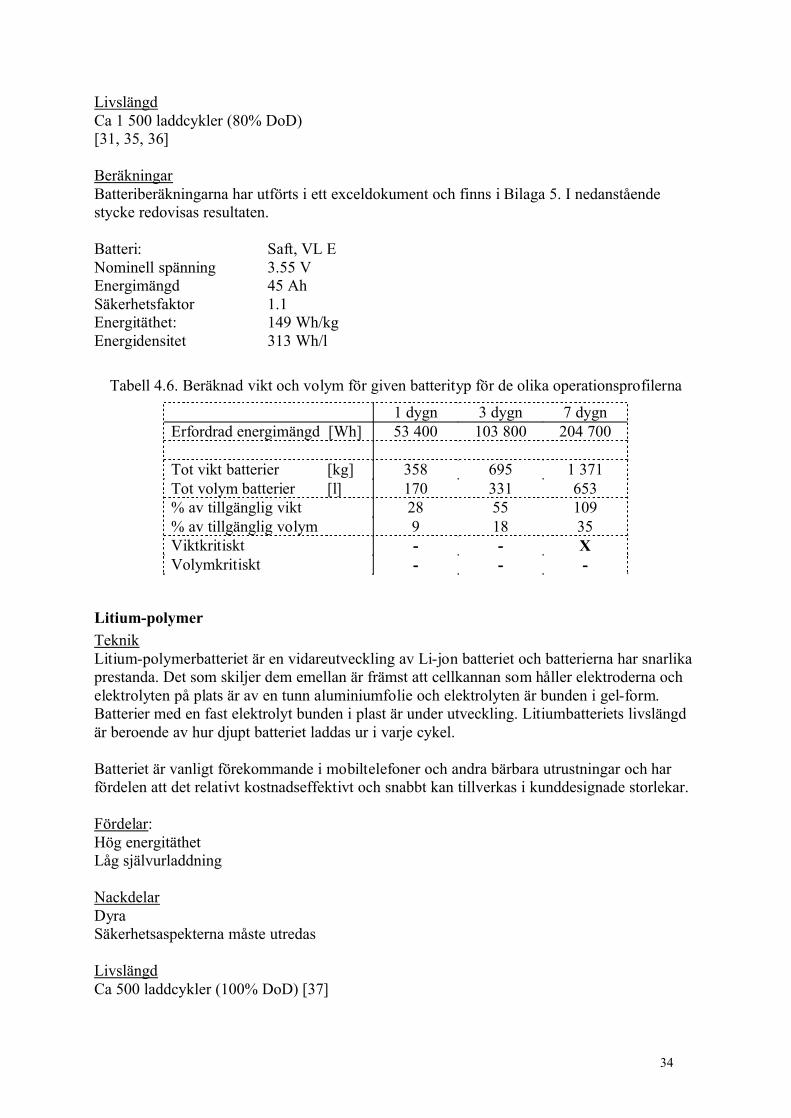
LivslängdCa 1 500 laddcykler (80% DoD)[31, 35, 36]
BeräkningarBatteriberäkningarna har utförts i ett exceldokument och finns i Bilaga 5. I nedanståendestycke redovisas resultaten.
Batteri: Saft, VL ENominell spänning 3.55 VEnergimängd 45 AhSäkerhetsfaktor 1.1Energitäthet: 149 Wh/kgEnergidensitet 313 Wh/l
Tabell 4.6. Beräknad vikt och volym för given batterityp för de olika operationsprofilerna
1 dygn 3 dygn 7 dygnErfordrad energimängd [Wh] 53 400 103 800 204 700
Tot vikt batterier [kg] 358 695 1 371Tot volym batterier [l] 170 331 653% av tillgänglig vikt 28 55 109% av tillgänglig volym 9 18 35Viktkritiskt - - XVolymkritiskt - - -
Litium-polymerTeknikLitium-polymerbatteriet är en vidareutveckling av Li-jon batteriet och batterierna har snarlika prestanda. Det som skiljer dem emellan är främst att cellkannan som håller elektroderna och elektrolyten på plats är av en tunn aluminiumfolie och elektrolyten är bunden i gel-form. Batterier med en fast elektrolyt bunden i plast är under utveckling. Litiumbatteriets livslängd är beroende av hur djupt batteriet laddas ur i varje cykel.
Batteriet är vanligt förekommande i mobiltelefoner och andra bärbara utrustningar och har fördelen att det relativt kostnadseffektivt och snabbt kan tillverkas i kunddesignade storlekar.
Fördelar:Hög energitäthetLåg självurladdning
NackdelarDyraSäkerhetsaspekterna måste utredas
LivslängdCa 500 laddcykler (100% DoD) [37]
35
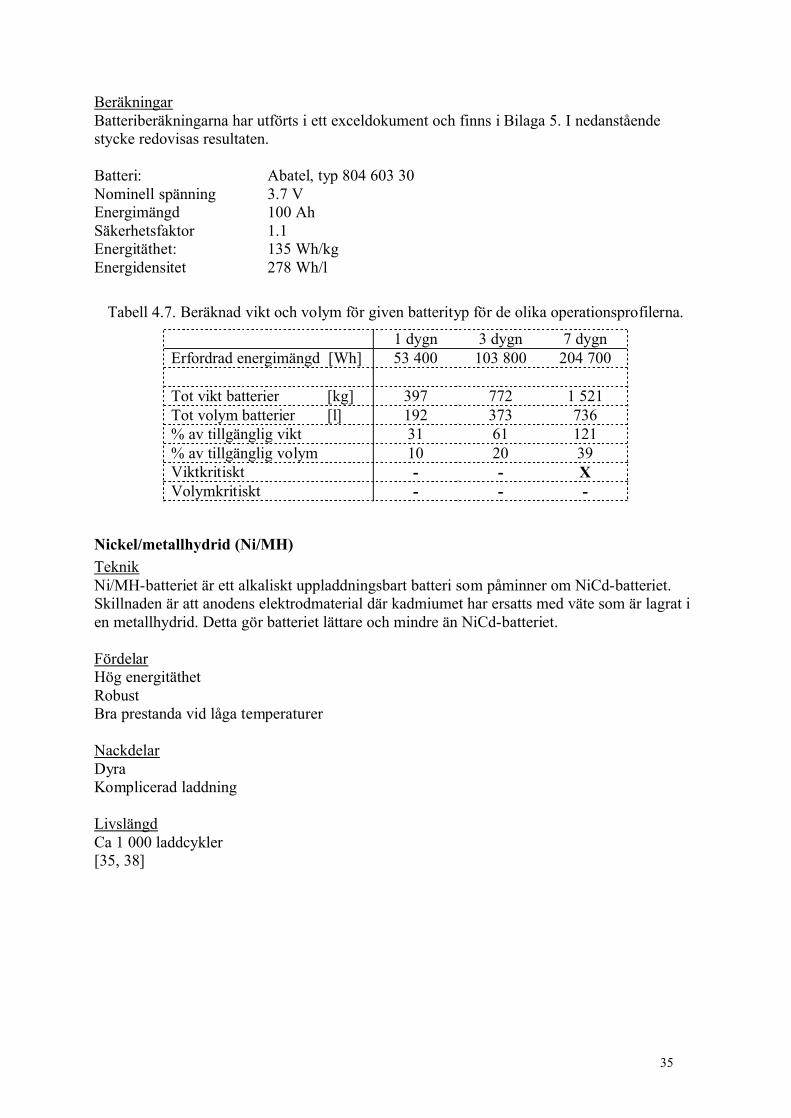
BeräkningarBatteriberäkningarna har utförts i ett exceldokument och finns i Bilaga 5. I nedanstående stycke redovisas resultaten.
Batteri: Abatel, typ 804 603 30Nominell spänning 3.7 VEnergimängd 100 AhSäkerhetsfaktor 1.1Energitäthet: 135 Wh/kgEnergidensitet 278 Wh/l
Tabell 4.7. Beräknad vikt och volym för given batterityp för de olika operationsprofilerna.
1 dygn 3 dygn 7 dygnErfordrad energimängd [Wh] 53 400 103 800 204 700
Tot vikt batterier [kg] 397 772 1 521Tot volym batterier [l] 192 373 736% av tillgänglig vikt 31 61 121% av tillgänglig volym 10 20 39Viktkritiskt - - XVolymkritiskt - - -
Nickel/metallhydrid (Ni/MH)TeknikNi/MH-batteriet är ett alkaliskt uppladdningsbart batteri som påminner om NiCd-batteriet. Skillnaden är att anodens elektrodmaterial där kadmiumet har ersatts med väte som är lagrat i en metallhydrid. Detta gör batteriet lättare och mindre än NiCd-batteriet.
FördelarHög energitäthetRobustBra prestanda vid låga temperaturer
NackdelarDyraKomplicerad laddning
LivslängdCa 1 000 laddcykler[35, 38]
36
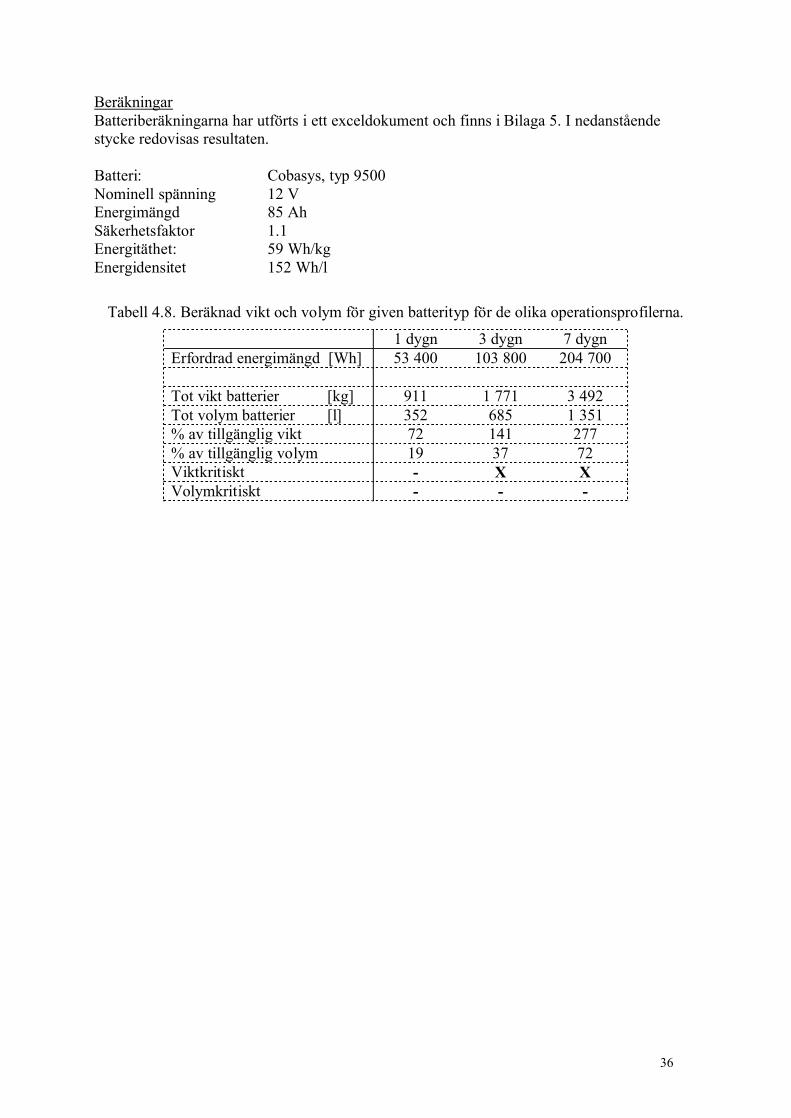
BeräkningarBatteriberäkningarna har utförts i ett exceldokument och finns i Bilaga 5. I nedanstående stycke redovisas resultaten.
Batteri: Cobasys, typ 9500Nominell spänning 12 VEnergimängd 85 AhSäkerhetsfaktor 1.1Energitäthet: 59 Wh/kgEnergidensitet 152 Wh/l
Tabell 4.8. Beräknad vikt och volym för given batterityp för de olika operationsprofilerna.
1 dygn 3 dygn 7 dygnErfordrad energimängd [Wh] 53 400 103 800 204 700
Tot vikt batterier [kg] 911 1 771 3 492Tot volym batterier [l] 352 685 1 351% av tillgänglig vikt 72 141 277% av tillgänglig volym 19 37 72Viktkritiskt - X XVolymkritiskt - - -
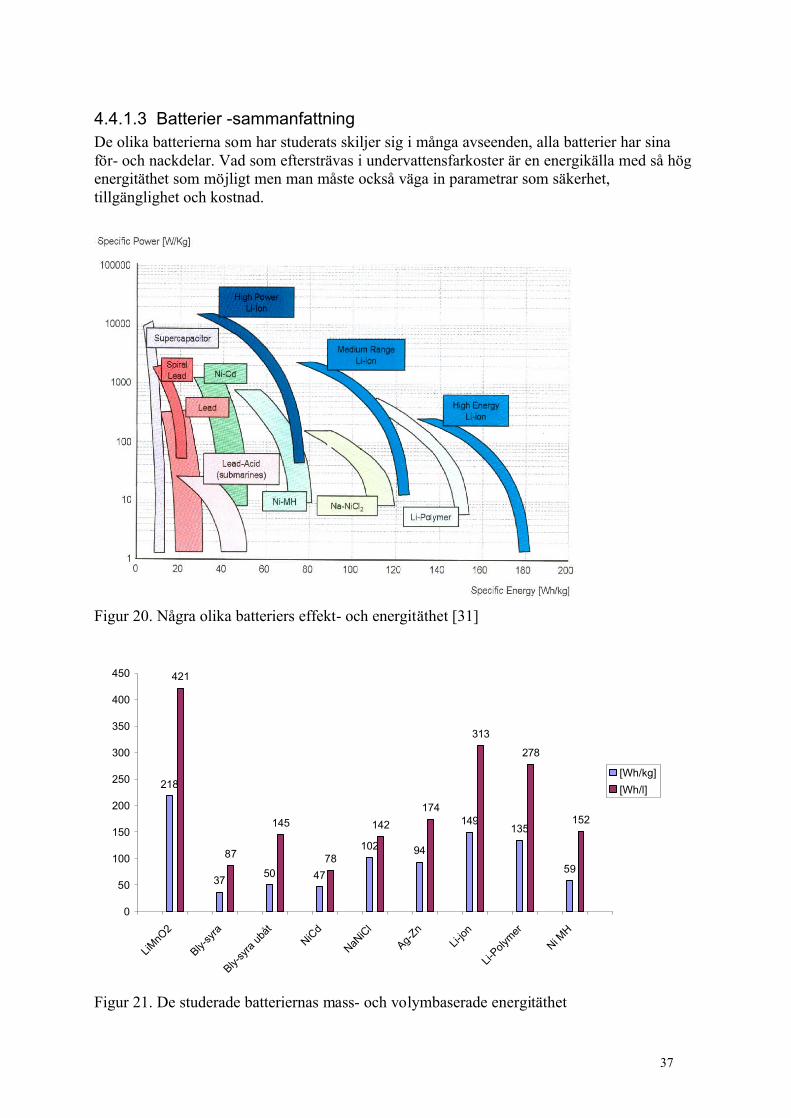
37
4.4.1.3 Batterier -sammanfattningDe olika batterierna som har studerats skiljer sig i många avseenden, alla batterier har sina för- och nackdelar. Vad som eftersträvas i undervattensfarkoster är en energikälla med så hög energitäthet som möjligt men man måste också väga in parametrar som säkerhet, tillgänglighet och kostnad.
Figur 20. Några olika batteriers effekt- och energitäthet [31]
218
37 50 47
102 94
149135
59
421
87
145
78
142174
313
278
152
0
50
100
150
200
250
300
350
400
450
LiMnO
2
Bly-sy
ra
Bly-sy
ra ub
åtNiC
d
NaNiCl
Ag-Zn
Li-jon
Li-Poly
mer
Ni MH
[Wh/kg][Wh/l]
Figur 21. De studerade batteriernas mass- och volymbaserade energitäthet
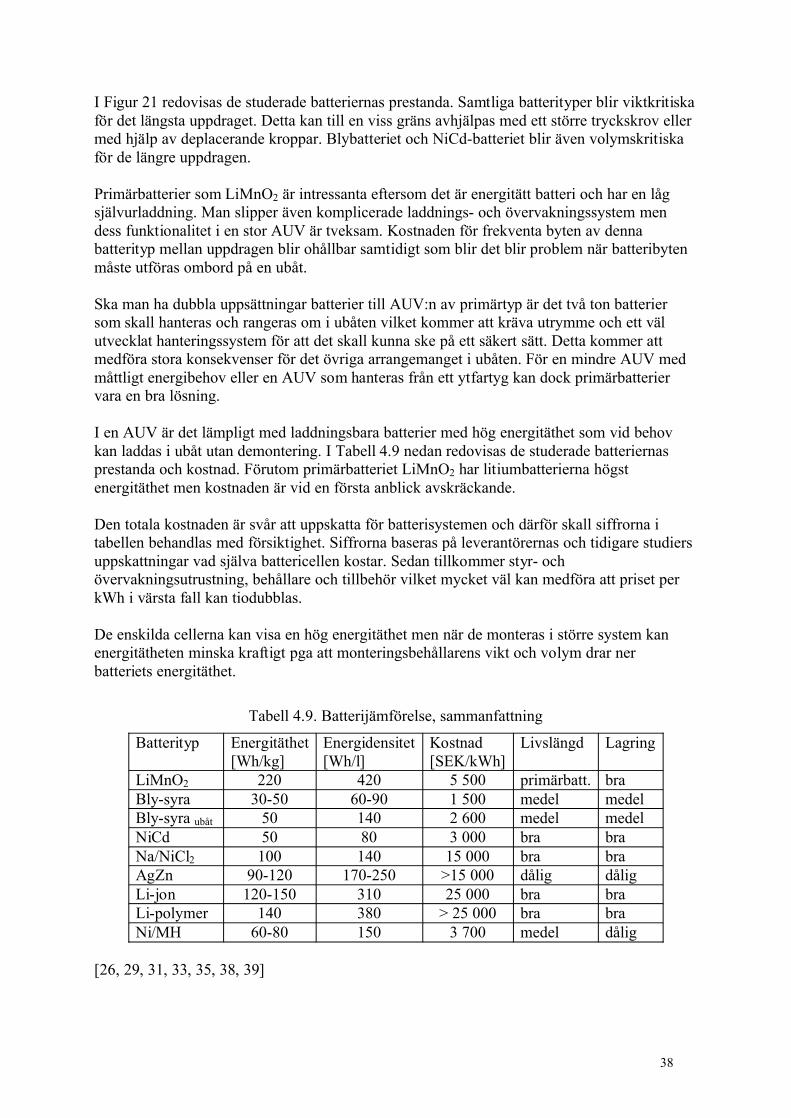
38
I Figur 21 redovisas de studerade batteriernas prestanda. Samtliga batterityper blir viktkritiska för det längsta uppdraget. Detta kan till en viss gräns avhjälpas med ett större tryckskrov eller med hjälp av deplacerande kroppar. Blybatteriet och NiCd-batteriet blir även volymskritiska för de längre uppdragen.
Primärbatterier som LiMnO2 är intressanta eftersom det är energitätt batteri och har en låg självurladdning. Man slipper även komplicerade laddnings- och övervakningssystem men dess funktionalitet i en stor AUV är tveksam. Kostnaden för frekventa byten av denna batterityp mellan uppdragen blir ohållbar samtidigt som blir det blir problem när batteribyten måste utföras ombord på en ubåt.
Ska man ha dubbla uppsättningar batterier till AUV:n av primärtyp är det två ton batterier som skall hanteras och rangeras om i ubåten vilket kommer att kräva utrymme och ett väl utvecklat hanteringssystem för att det skall kunna ske på ett säkert sätt. Detta kommer att medföra stora konsekvenser för det övriga arrangemanget i ubåten. För en mindre AUV med måttligt energibehov eller en AUV som hanteras från ett ytfartyg kan dock primärbatterier vara en bra lösning.
I en AUV är det lämpligt med laddningsbara batterier med hög energitäthet som vid behov kan laddas i ubåt utan demontering. I Tabell 4.9 nedan redovisas de studerade batteriernas prestanda och kostnad. Förutom primärbatteriet LiMnO2 har litiumbatterierna högst energitäthet men kostnaden är vid en första anblick avskräckande.
Den totala kostnaden är svår att uppskatta för batterisystemen och därför skall siffrorna i tabellen behandlas med försiktighet. Siffrorna baseras på leverantörernas och tidigare studiers uppskattningar vad själva battericellen kostar. Sedan tillkommer styr- och övervakningsutrustning, behållare och tillbehör vilket mycket väl kan medföra att priset per kWh i värsta fall kan tiodubblas.
De enskilda cellerna kan visa en hög energitäthet men när de monteras i större system kan energitätheten minska kraftigt pga att monteringsbehållarens vikt och volym drar ner batteriets energitäthet.
Tabell 4.9. Batterijämförelse, sammanfattning
Batterityp Energitäthet [Wh/kg]
Energidensitet[Wh/l]
Kostnad [SEK/kWh]
Livslängd Lagring
LiMnO2 220 420 5 500 primärbatt. braBly-syra 30-50 60-90 1 500 medel medelBly-syra ubåt 50 140 2 600 medel medelNiCd 50 80 3 000 bra braNa/NiCl2 100 140 15 000 bra braAgZn 90-120 170-250 >15 000 dålig dåligLi-jon 120-150 310 25 000 bra braLi-polymer 140 380 > 25 000 bra braNi/MH 60-80 150 3 700 medel dålig
[26, 29, 31, 33, 35, 38, 39]
39
Säkerheten för systemet är mycket viktig då AUV:n skall kunna hanteras i en bemannad ubåt.De nya energitäta batterierna innehåller bland annat metalliskt litium och natrium vilka är extremt reaktiva ämnen. Elektrolyten består av organiska lösningsmedel vilket kan medföra en ökad brandrisk.
Zebrabatteriet innehåller en mycket varm elektrolyt och det skulle kunna ge upphov till förödande konsekvenser om ett sådant batteri skulle explodera. Batterierna kräver noggrann styrning och övervakning av varje cell under laddning för att undvika haverier.
Då farkosten är obemannad ställs inte samma krav på miljön i AUV:n som i en bemannad farkost. Men om farkosten skall kunna hanteras på en ubåt måste det garanteras att batterisystemet fungerar på ett säkert sätt. Därför måste alla säkerhetsrisker utredas för batterierna.
En ytterligare säkerhetsaspekt är om AUV:n och dess energisystem skall klara en chockvåg från en undervattensexplosion. Detta kommer i så fall att resultera i ytterligare säkerhetsproblem vilka måste utredas.

40
4.4.2 SolcellerSolceller utnyttjar den strålningsenergi som solen ger upphov till. Effekten på strålningsenergin varierar med vilken latitud man befinner sig på. För att driva AUV:n med solceller krävs att farkosten kan samla in tillräckligt mycket energi under dagens ljusa timmar. Detta kräver följaktligen att AUV:n går i ytläge periodvis vilket kanske ej harmonierar med uppdragsprofilen.
Räkneexempel:Uppmätt solstrålning mot en horisontell yta en augustidag i södra Sverige: 1 550 Wh/m2 per dygn. Farkosten kan antas ha en vingliknande solpanelsyta med måtten 5 x 0.8 m (jfr med den studerade AUV:n). Verkningsgraden för solceller till den här typen av applikation är ca 10 %.[40, 41]
Detta innebär att den totala mängden insamlad energi är ca 620 Wh per dygn vilket endast motsvarar ca 1 % av energibehovet för den givna operationsprofilen för 1 dygn.
Den insamlade energimängden hade dock kunnat försörja farkosten om den färdats i låga hastigheter (~ 1 knop) och med färre energikrävande komponenter som aktiva sonarer. Man skall dock beakta att strömningsmotståndet ökar med solpanelsvingen vilket också ökar energibehovet.
Som en sammanfattning av solceller kan det nämnas att om man har ett lågt effekt- och energibehov men ett långt uthållighetsbehov kan solceller vara en lösning. För en undervattensfarkost med sonarer blir det dock svårt att täcka energibehovet med enbart solceller.
4.4.3 BränslecellerBränsleceller (BC) omvandlar energi på elektrokemisk väg där bränslet reagerar med en oxidant och bildar elektricitet och värme utan en förbränningsprocess. Varje cell består oftastav två porösa elektroder med en elektrolyt emellan. I den vanligaste bränslecellsreaktionen leds bränslet, vanligen vätgas, till anoden där molekylerna oxideras vilket frigör elektroner som vandrar via en extern krets till katoden. Elektronerna utnyttjas för jonisering av syrgasmolekylerna som reagerar med vätet och bildar vatten som slutprodukt. Katoden tillförs syrgas eller luft som oxidator. Jonerna kan antingen vara positiva eller negativa beroende på vilket ämne som används som elektrolyt. Det finns både tub- och plattformade BC.
De flesta BC drivs av vätgas. Vissa typer kan dock drivas direkt av naturgas eller metanol. Några system har en integrerad reformer där naturgas, metanol eller något liknande väterikt bränsle spjälkas så att vätgas framställes till BC.

41
Figur 22. Bränslecellsprocessen
Cellreaktion: OHOH 222 21
→+
Cellspänningen för en BC är låg, 0.5-0.9 volt, vilket medför att man kopplar ihop flera celler i stackar för att uppnå den önskade spänningen. Strömstyrkan är proportionell mot elektrodernas yta. Cellens effekt beror på flödet av vätgas till cellen och dess utnyttjandegrad.
Cellens effekt:2, HfDCel NUFnuP ⋅⋅⋅⋅=
uf bränslets utnyttjandegradn antal utbytta elektroner i elektrodreaktionernaF Faradays tal [96 485 As/mol]U cellspänning [V]
2HΝ molflöde bränsle [mol/s]
BC är ett teknikområde som är under stark utveckling och har många potentiella användningsområden. De passar väldigt bra att byggas upp modulärt och har använts som energikälla i små utrustningar på några få watt upp till stora kraftverk med kombicykler där BC är ihopkopplad med en gasturbin på flera megawatt. Rymdindustrin har använt sig av alkaliska BC sedan 60-talet och inom transportsektorn har flera försök gjorts med BC. Den kanske mest kända bränslecellsapplikationen är den alkaliska cell som NASA utvecklade och använde i Apollo-rymdprogrammet. Denna BC hade en effekt på 1.4 kW och en elverkningsgrad på 50 % vilket än idag är ett mycket bra värde. [42]
BC fördelar:
• Hög verkningsgrad• Låga utsläpp• Tyst drift• Modulariteten• Hög dellastprestanda• Litet underhåll
e-
Anod (-)
Katod (+)
Katalysator
Katalysator
Elektrolyt
H2O
O2
H2
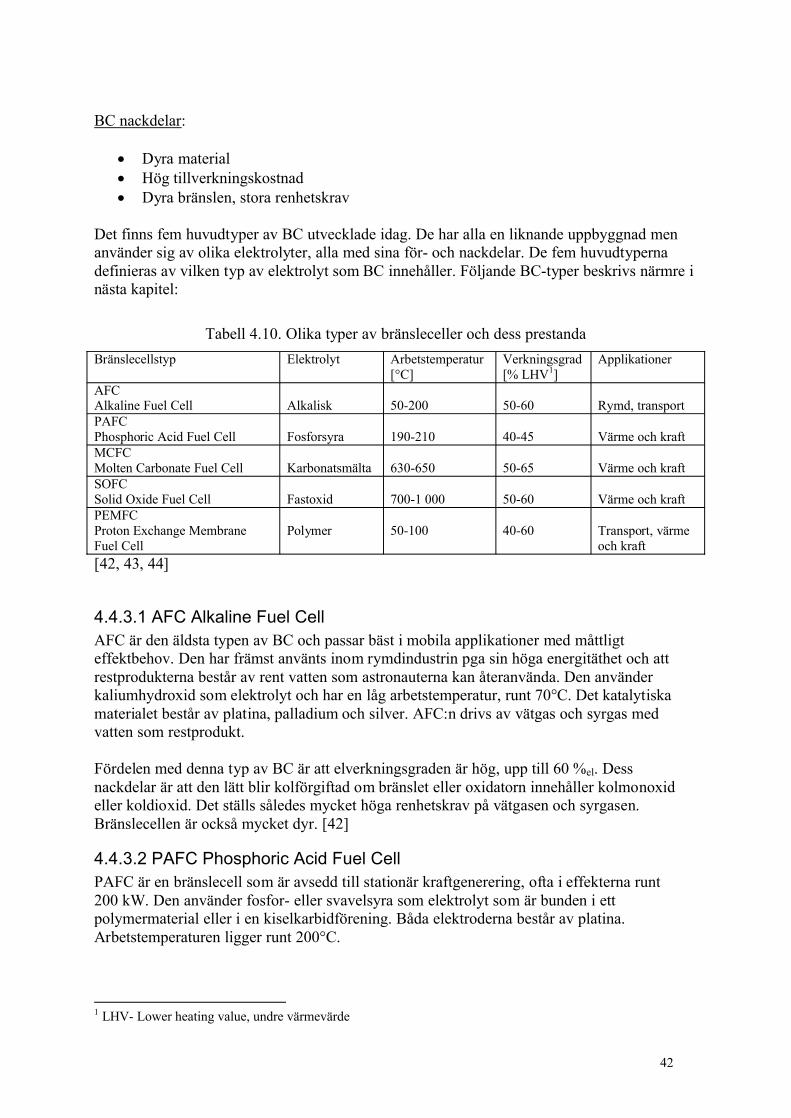
42
BC nackdelar:
• Dyra material• Hög tillverkningskostnad• Dyra bränslen, stora renhetskrav
Det finns fem huvudtyper av BC utvecklade idag. De har alla en liknande uppbyggnad men använder sig av olika elektrolyter, alla med sina för- och nackdelar. De fem huvudtyperna definieras av vilken typ av elektrolyt som BC innehåller. Följande BC-typer beskrivs närmre i nästa kapitel:
Tabell 4.10. Olika typer av bränsleceller och dess prestandaBränslecellstyp Elektrolyt Arbetstemperatur
[°C]Verkningsgrad [% LHV1]
Applikationer
AFCAlkaline Fuel Cell Alkalisk 50-200 50-60 Rymd, transportPAFCPhosphoric Acid Fuel Cell Fosforsyra 190-210 40-45 Värme och kraftMCFCMolten Carbonate Fuel Cell Karbonatsmälta 630-650 50-65 Värme och kraftSOFCSolid Oxide Fuel Cell Fastoxid 700-1 000 50-60 Värme och kraftPEMFCProton Exchange Membrane Fuel Cell
Polymer 50-100 40-60 Transport, värme och kraft
[42, 43, 44]
4.4.3.1 AFC Alkaline Fuel CellAFC är den äldsta typen av BC och passar bäst i mobila applikationer med måttligt effektbehov. Den har främst använts inom rymdindustrin pga sin höga energitäthet och att restprodukterna består av rent vatten som astronauterna kan återanvända. Den använder kaliumhydroxid som elektrolyt och har en låg arbetstemperatur, runt 70°C. Det katalytiska materialet består av platina, palladium och silver. AFC:n drivs av vätgas och syrgas med vatten som restprodukt.
Fördelen med denna typ av BC är att elverkningsgraden är hög, upp till 60 %el. Dess nackdelar är att den lätt blir kolförgiftad om bränslet eller oxidatorn innehåller kolmonoxid eller koldioxid. Det ställs således mycket höga renhetskrav på vätgasen och syrgasen. Bränslecellen är också mycket dyr. [42]
4.4.3.2 PAFC Phosphoric Acid Fuel CellPAFC är en bränslecell som är avsedd till stationär kraftgenerering, ofta i effekterna runt 200 kW. Den använder fosfor- eller svavelsyra som elektrolyt som är bunden i ett polymermaterial eller i en kiselkarbidförening. Båda elektroderna består av platina.Arbetstemperaturen ligger runt 200°C.
1 LHV- Lower heating value, undre värmevärde
43
PAFC-aggregat är stora och tunga och kräver uppvärmning vid start. Därför passar denna typ bäst till stationär elgenerering. Den värme som utvecklas under processen kan användas vid reformering av primärbränslet och då kan man nå en elverkningsgrad runt 40 %. Tar man hand om restvärmen som bildas under processen kan verkningsgrader upp till 80 % uppnås.
PAFC:s fördelar är den höga verkningsgraden om man återanvänder restvärmen. Dess nackdelar är att cellen kräver ett rent bränsle (CO förgiftar elektroderna) och elektrolythanteringen. Cellen degenereras också genom sintring av katalysatorpartiklarna. Denna typ av BC är också mycket dyr. [42, 45]
4.4.3.3 MCFC Molten Carbonate Fuel CellMCFC är en BC som passar bäst för stationär kraftregenerering, upp till några megawatt. Elektrolyten består av en smälta av litium och kaliumkarbonat. Elektrolyten är bunden i en keramisk litiumaluminiumoxid-matris. Anoden består av nickel och krom och katoden består av nickeloxid och litium. Arbetstemperaturen ligger runt 650°C.
MCFC fördelar är dess höga elverkningsgrad på ca 65 % samt att den ej är känslig för kolföreningar i bränslet. Cellen kan även använda CO som bränsle. Dess nackdelar är att den höga driftstemperaturen kan ge upphov till höga termiska spänningar som kan resultera i materialbrott, samt korrosionsproblem vid strömledningsplattorna. Det tar lång tid att nå den optimala arbetstemperaturen vid kallstart för denna bränslecellstyp och den svarar sent på ändringar i lasten. Utvecklingen för denna BC är för närvarande på sparlåga. BC storlek och egenskaper begränsar dess användning till stationär kraftgenerering vid en konstant effekt.[42, 45]
4.4.3.4 SOFC Solid Oxide Fuel CellSOFC är en högtemperaturbränslecell som är i ett ganska tidigt utvecklingsskede. BC har en arbetstemperatur på ca 1 000°C vilket medger att den kan drivas med bränslen som inte är 100 procent rena. Elektrolyten består av en keramisk, ickeporös sammansättning av zirkoniumoxid med vissa stabiliserande tillsatser. Vid den höga temperaturen kan syrejonerna vandra genom kristallgittret och leda strömmen.
SOFC fördelar är dess höga elverkningsgrad på ca 60 % och att den kan utnyttja CO som bränsle. Bränslecellen är dock stor och tung och har lång uppstartningstid och passar därför bäst till större stationära applikationer. För att förbättra totalverkningsgraden för dessa system kan man kombinera den med en gasturbincykel. Problemet med denna typ av bränslecell är att hitta material som tål de höga temperaturerna. Försök har gjorts att sänka arbetstemperaturen men detta har hittills resulterat i en försämrad verkningsgrad. [42, 46]
4.4.3.5 PEMFC Protone Exchange Membrane Fuel CellPEMFC – Protone Exchange Membrane Fuel Cell eller Polymer Electrolyte Fuel Cell är den typ av BC som är under utveckling av de flesta bränslecellsföretagen. Elektroderna består av ett poröst inert material som är belagt med platina. Vid anoden sker den elektrokemiska oxidationen av vätgas och vid katoden reduktionen av syrgas. Elektrolyten består av en protonledande tunn film av polymermaterial som även fungerar som separator för de reagerande gaserna.
Cellen har en arbetstemperatur på mellan 50-100°C och en elverkningsgrad på ca 35-60 %. Modulerna finns vanligen i storlekar från några få watt upp till 250 kW. PEMFC fördelar är att den har en hög energidensitet och verkningsgrad och har därför använts inom
44
transportsektorn. Den har ingen uppvärmningstid vid kallstart och svarar mycket snabbt på laständringar. Denna cell är också mindre dyr än de andra beskrivna bränslecellerna.
PEMFC nackdel är att den lätt blir kolmonoxidförgiftad och kräver således ett rent bränsle. Detta kan dock lösas genom att syrgas sprutas in tillsammans med bränslet i ett tidigt skede för att oxidera CO till CO2. Cellen är dock fortfarande dyr jämfört med t ex batterier. [42, 45]
4.4.3.6 Beräkningsexempel för PEMFCAv de bränslecellstyper som beskrivits utkristalliseras PEM-cellen som det enda realistiska alternativet i en AUV-applikation. AFC hade kunnat passa i en undervattensfarkost men kostnaden för detta system är väldigt hög. Denna typ av cell har utvecklats och specialiserats för rymdindustrin. PAFC, MCFC och SOFC är alla större och tyngre system med hög arbetstemperatur som passar bäst för stationär kraftgenerering vid en någorlunda konstant effekt.
PEM-cellen förefaller dock passa i en undervattensfarkost då den kan levereras i mindre effekter och lätt kan byggas upp modulärt till önskad effekt och spänning. Den har hög effekttäthet och det är den cell som har kommit längst på vägen till kommersialisering. PEM-cellen har ingen kallstartstid och svarar snabbt på förändringar i lasten och har i stort sätt bibehållen verkningsgrad vid del-laster. PEM är ej heller lika känslig för föroreningar i bränslet som AFC och priset för cellen är lägre än för de andra som nämnts i studien.
Ytterligare en fördel är att vid PEM-processen bildas endast vatten vilket kan kondenseras och lagras i AUV:n. Då undviker man även problemet med att behöva viktkompensera farkosten för åtgånget bränsle och oxidant om restprodukterna lagras i farkosten efter reaktionen.
Flera olika företag säljer också denna typ av cell i olika utföranden och effekter. Cellkraft, Idatech och Siemens är exempel på företag som har PEM-moduler till försäljning. [42, 43, 46]
Av ovan nämnda bränslecellstyper tas bara PEM-cellen upp som beräkningsexempel då den anses vara den enda bränslecellstyp som passar AUV:n som denna studie behandlar.
Bränslelagring till PEMFCPEMFC drivs av ren vätgas eller av ett primärbränsle som t ex metanol eller naturgas som reformeras till vätgas.
Vätgas är ett bränsle som innehåller mer kemisk energi per viktenhet än något annat kolvätebränsle men på grund av sin molekylära uppbyggnad är väte dåligt packat och harväldigt låg densitet. Detta medför att den volymbaserade energitätheten blir mycket låg för väte, knappt 2 MJ/liter för trycksatt vätgas (200 bar) mot exempelvis 35 MJ/liter för diesel, (se Tabell 4.12). För att öka energitätheten kan vätgasen komprimeras ytterligare, förvaras kryogeniskt eller bindas i en kemisk förening av metall eller kol. Väte kan även lagras i en litium- eller natriumborhydridlösning. Alla varianterna har sina för och nackdelar. På följande sidor studeras några av lagringssätten närmre. [47]
45
Komprimerad förvaringVätgas säljs kommersiellt i 50 liters standardgastuber vid ca 200 bars tryck. Energitätheten är dock låg, ca 2 MJ/liter. Fördelen är att det finns ett väl utvecklat logistiksystem för distribution av vätgas vid detta tryck.
Vätgasen kan komprimeras ytterligare men det ställer större krav på gastuberna som ökar i vikt om de byggs i konventionellt tryckkärlsstål. Gastuber i kompositmaterial har dock utvecklats på senare år som klarar höga tryck, upp till 900 bar. Som exempel kan nämnas att AirLiquide utvecklat 47 liters gastuber i kompositmaterial som tål 350 bars tryck och endast väger 22 kg. Det kan jämföras mot en 50 liters standardgastub för 200 bar som väger 75 kg. [48, 49, 50]
Kryogenisk förvaringVid kryogenisk lagring kyls vätgasen ner tills den blir flytande vid -253°C. Därefter förvaras den i ett välisolerat kärl. Fördelen med denna förvaring är en högre energitäthet, ca 8 MJ/liter,men förvaringskärlen och dess kringsystem är tunga, komplexa och dyra. Denna förvaringstyp är också tidsbegränsad, efter något dygn ökar temperaturen i kärlet vilket medför att vätgasen börjar koka bort.
MetallhydriderMycket forskning har lagts på att få fram alternativ till trycksatt eller kryogenisk vätgaslagring för att öka energitätheten. Metallhydrider (MH) kan lagra väte reversibelt och har visat sig kunna öka energitätheten mångdubbelt jämfört med trycksatt lagring (se Tabell4.12).
En metallhydrid består av en pulveriserad intermetall som vid vätgasexponering bildar en metallhydrid. Vätgasen absorberas av intermetallen genom att väteatomerna lagrar sig interstitiellt i gitterstrukturen i en trycksatt exoterm process. Det är alltså inte vätgasmolekylen som absorberas i sin helhet i gasform. Reaktionen är reversibel och för att frige vätgasen måste energi tillföras. Hur mycket vätgas som kan absorberas eller avges per tidsenhet beror på i vilken takt värmen kan transporteras in eller ut ur metallhydriden.
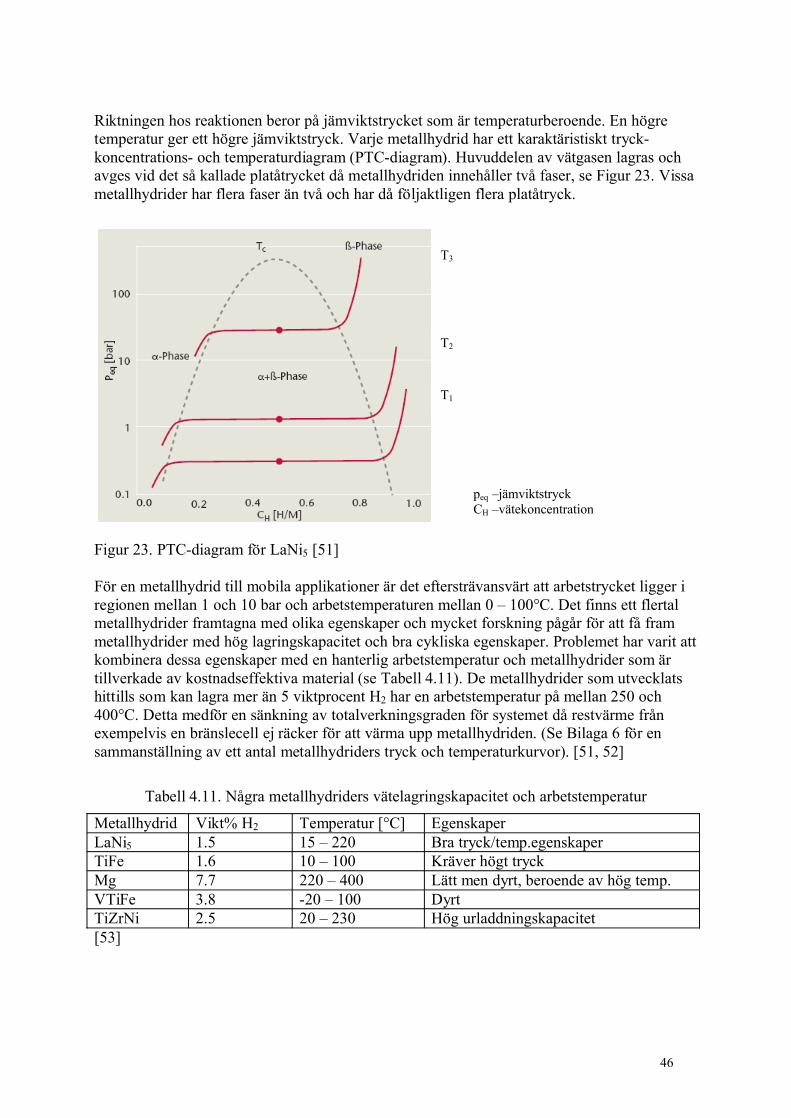
46
Riktningen hos reaktionen beror på jämviktstrycket som är temperaturberoende. En högre temperatur ger ett högre jämviktstryck. Varje metallhydrid har ett karaktäristiskt tryck-koncentrations- och temperaturdiagram (PTC-diagram). Huvuddelen av vätgasen lagras och avges vid det så kallade platåtrycket då metallhydriden innehåller två faser, se Figur 23. Vissa metallhydrider har flera faser än två och har då följaktligen flera platåtryck.
Figur 23. PTC-diagram för LaNi5 [51]
För en metallhydrid till mobila applikationer är det eftersträvansvärt att arbetstrycket ligger i regionen mellan 1 och 10 bar och arbetstemperaturen mellan 0 – 100°C. Det finns ett flertal metallhydrider framtagna med olika egenskaper och mycket forskning pågår för att få fram metallhydrider med hög lagringskapacitet och bra cykliska egenskaper. Problemet har varit att kombinera dessa egenskaper med en hanterlig arbetstemperatur och metallhydrider som är tillverkade av kostnadseffektiva material (se Tabell 4.11). De metallhydrider som utvecklats hittills som kan lagra mer än 5 viktprocent H2 har en arbetstemperatur på mellan 250 och 400°C. Detta medför en sänkning av totalverkningsgraden för systemet då restvärme från exempelvis en bränslecell ej räcker för att värma upp metallhydriden. (Se Bilaga 6 för en sammanställning av ett antal metallhydriders tryck och temperaturkurvor). [51, 52]
Tabell 4.11. Några metallhydriders vätelagringskapacitet och arbetstemperatur
Metallhydrid Vikt% H2 Temperatur [°C] EgenskaperLaNi5 1.5 15 – 220 Bra tryck/temp.egenskaperTiFe 1.6 10 – 100 Kräver högt tryckMg 7.7 220 – 400 Lätt men dyrt, beroende av hög temp.VTiFe 3.8 -20 – 100 DyrtTiZrNi 2.5 20 – 230 Hög urladdningskapacitet[53]
peq –jämviktstryck CH –vätekoncentration
T1
T2
T3
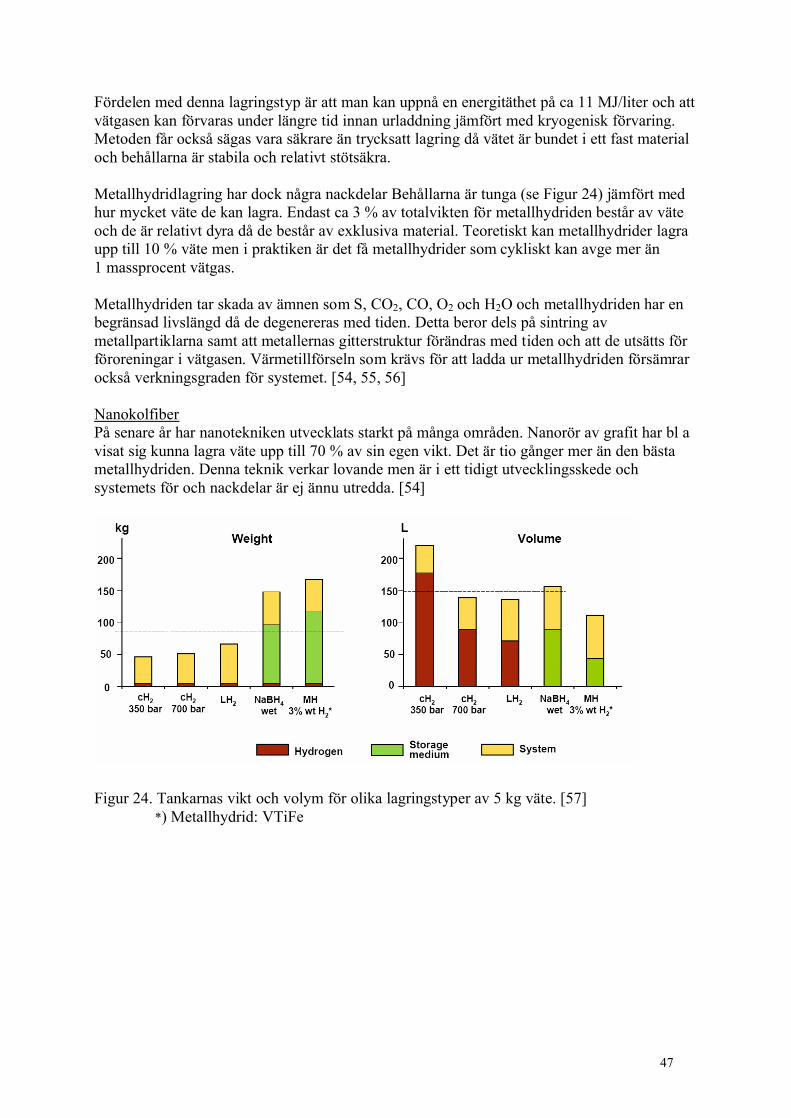
47
Fördelen med denna lagringstyp är att man kan uppnå en energitäthet på ca 11 MJ/liter och attvätgasen kan förvaras under längre tid innan urladdning jämfört med kryogenisk förvaring.Metoden får också sägas vara säkrare än trycksatt lagring då vätet är bundet i ett fast material och behållarna är stabila och relativt stötsäkra.
Metallhydridlagring har dock några nackdelar Behållarna är tunga (se Figur 24) jämfört med hur mycket väte de kan lagra. Endast ca 3 % av totalvikten för metallhydriden består av väteoch de är relativt dyra då de består av exklusiva material. Teoretiskt kan metallhydrider lagra upp till 10 % väte men i praktiken är det få metallhydrider som cykliskt kan avge mer än1 massprocent vätgas.
Metallhydriden tar skada av ämnen som S, CO2, CO, O2 och H2O och metallhydriden har en begränsad livslängd då de degenereras med tiden. Detta beror dels på sintring av metallpartiklarna samt att metallernas gitterstruktur förändras med tiden och att de utsätts för föroreningar i vätgasen. Värmetillförseln som krävs för att ladda ur metallhydriden försämrar också verkningsgraden för systemet. [54, 55, 56]
NanokolfiberPå senare år har nanotekniken utvecklats starkt på många områden. Nanorör av grafit har bl a visat sig kunna lagra väte upp till 70 % av sin egen vikt. Det är tio gånger mer än den bästa metallhydriden. Denna teknik verkar lovande men är i ett tidigt utvecklingsskede och systemets för och nackdelar är ej ännu utredda. [54]
Figur 24. Tankarnas vikt och volym för olika lagringstyper av 5 kg väte. [57]*) Metallhydrid: VTiFe
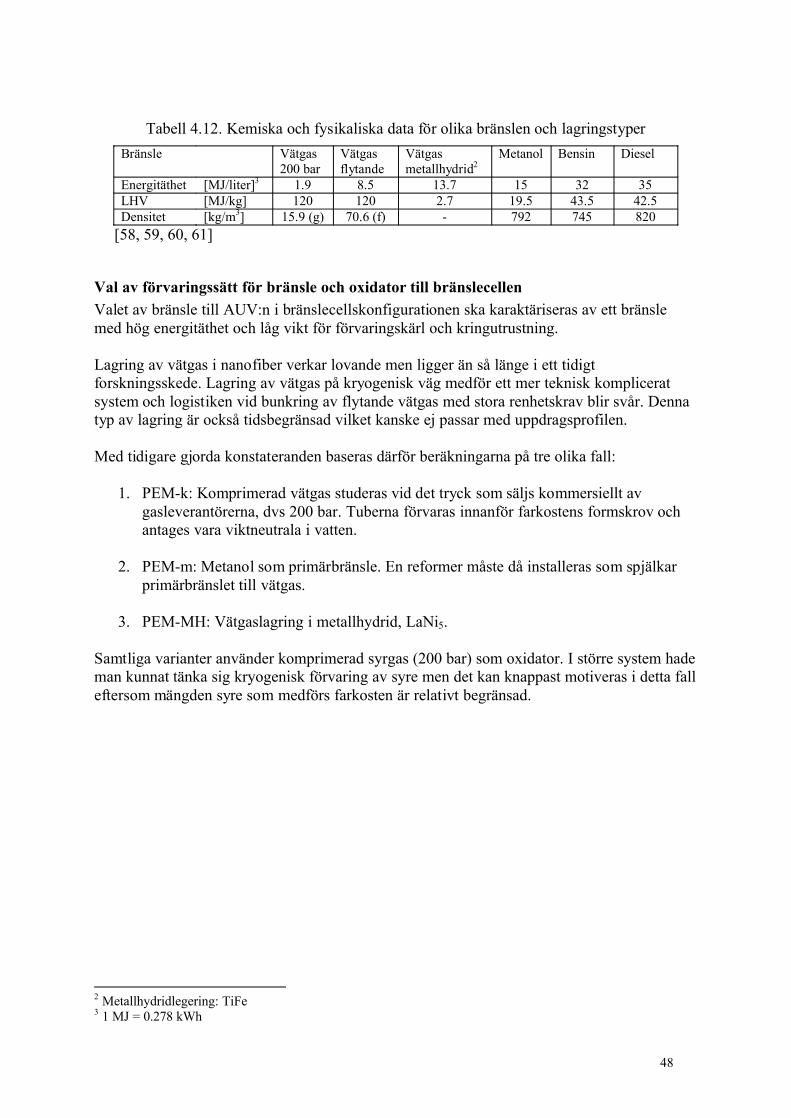
48
Tabell 4.12. Kemiska och fysikaliska data för olika bränslen och lagringstyperBränsle Vätgas
200 barVätgas flytande
Vätgasmetallhydrid2
Metanol Bensin Diesel
Energitäthet [MJ/liter]3 1.9 8.5 13.7 15 32 35LHV [MJ/kg] 120 120 2.7 19.5 43.5 42.5Densitet [kg/m3] 15.9 (g) 70.6 (f) - 792 745 820
[58, 59, 60, 61]
Val av förvaringssätt för bränsle och oxidator till bränslecellenValet av bränsle till AUV:n i bränslecellskonfigurationen ska karaktäriseras av ett bränsle med hög energitäthet och låg vikt för förvaringskärl och kringutrustning.
Lagring av vätgas i nanofiber verkar lovande men ligger än så länge i ett tidigt forskningsskede. Lagring av vätgas på kryogenisk väg medför ett mer teknisk komplicerat system och logistiken vid bunkring av flytande vätgas med stora renhetskrav blir svår. Denna typ av lagring är också tidsbegränsad vilket kanske ej passar med uppdragsprofilen.
Med tidigare gjorda konstateranden baseras därför beräkningarna på tre olika fall:
1. PEM-k: Komprimerad vätgas studeras vid det tryck som säljs kommersiellt av gasleverantörerna, dvs 200 bar. Tuberna förvaras innanför farkostens formskrov och antages vara viktneutrala i vatten.
2. PEM-m: Metanol som primärbränsle. En reformer måste då installeras som spjälkar primärbränslet till vätgas.
3. PEM-MH: Vätgaslagring i metallhydrid, LaNi5.
Samtliga varianter använder komprimerad syrgas (200 bar) som oxidator. I större system hade man kunnat tänka sig kryogenisk förvaring av syre men det kan knappast motiveras i detta fall eftersom mängden syre som medförs farkosten är relativt begränsad.
2 Metallhydridlegering: TiFe3 1 MJ = 0.278 kWh
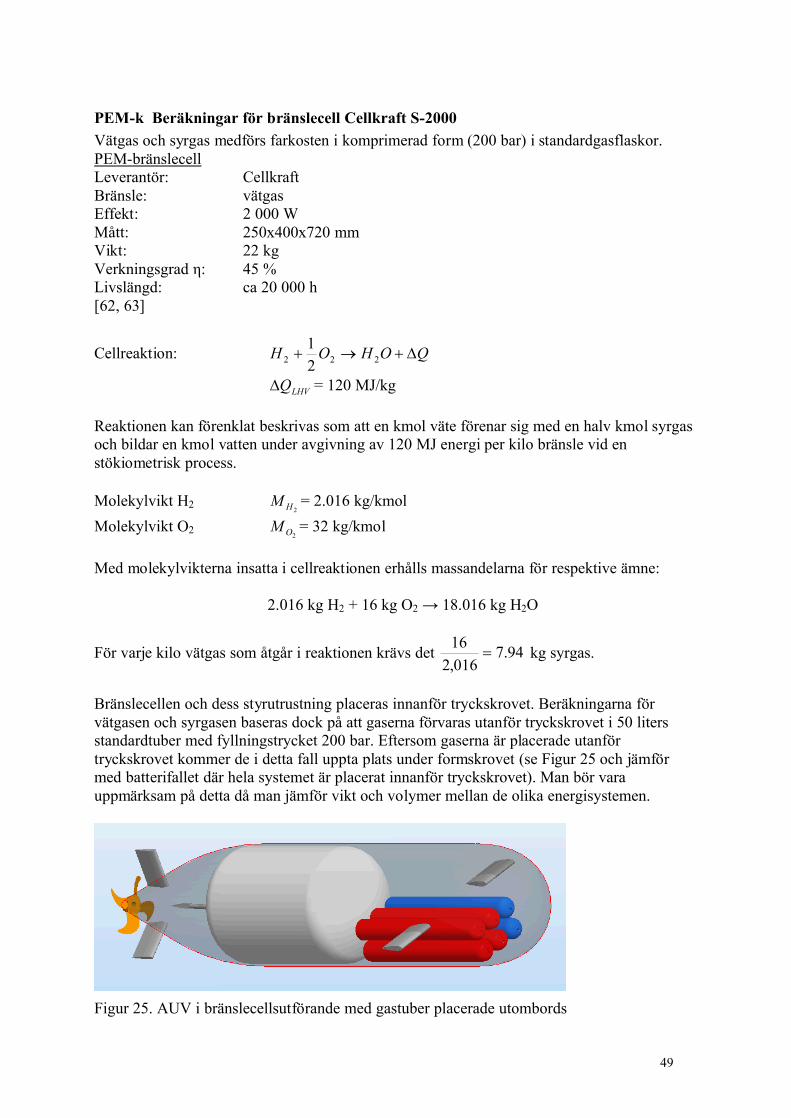
49
PEM-k Beräkningar för bränslecell Cellkraft S-2000 Vätgas och syrgas medförs farkosten i komprimerad form (200 bar) i standardgasflaskor.PEM-bränslecellLeverantör: CellkraftBränsle: vätgasEffekt: 2 000 WMått: 250x400x720 mmVikt: 22 kgVerkningsgrad η: 45 % Livslängd: ca 20 000 h[62, 63]
Cellreaktion: QOHOH ∆+→+ 222 21
LHVQ∆ = 120 MJ/kg
Reaktionen kan förenklat beskrivas som att en kmol väte förenar sig med en halv kmol syrgas och bildar en kmol vatten under avgivning av 120 MJ energi per kilo bränsle vid en stökiometrisk process.
Molekylvikt H22HM = 2.016 kg/kmol
Molekylvikt O22OM = 32 kg/kmol
Med molekylvikterna insatta i cellreaktionen erhålls massandelarna för respektive ämne:
2.016 kg H2 + 16 kg O2 → 18.016 kg H2O
För varje kilo vätgas som åtgår i reaktionen krävs det 94.7016,216
= kg syrgas.
Bränslecellen och dess styrutrustning placeras innanför tryckskrovet. Beräkningarna för vätgasen och syrgasen baseras dock på att gaserna förvaras utanför tryckskrovet i 50 liters standardtuber med fyllningstrycket 200 bar. Eftersom gaserna är placerade utanför tryckskrovet kommer de i detta fall uppta plats under formskrovet (se Figur 25 och jämförmed batterifallet där hela systemet är placerat innanför tryckskrovet). Man bör vara uppmärksam på detta då man jämför vikt och volymer mellan de olika energisystemen.
Figur 25. AUV i bränslecellsutförande med gastuber placerade utombords
50
Beräkningarna har utförts i ett exceldokument och finns i Bilaga 7. I nedanstående tabellredovisas resultaten.
Tabell 4.13. Beräknad vikt och volym för BC med komprimerat vätgasbränsle
1 dygn 3 dygn 7 dygnErfordrad elenergimängd4 [Wh] 48 500 94 400 186 100Erfordrad energimängd5 [Wh] 107 800 209 700 413 500
Vikt vätgas [kg] 3.2 6.3 12.4Volym vätgas [l @ 200 bar] 180 349 689Vikt syrgas [kg] 26 50 98Volym syrgas [l @ 200 bar] 91 177 349
Tot vikt systemet [kg] 605 992 1 767Tot volym systemet [l] 874 1 482 2 699% av tillgänglig vikt 4 4 4% av tillgänglig volym tryckskrov 8 8 8% av tillgänglig volym formskrov 19 35 67
Energitäthet [Wh/kg]6 80 95 105Energidensitet [Wh/l] 56 64 69
PEM-m Beräkningar för BC Cellkraft S-2000 med Idatech metanolreformerSom alternativ till att medföra bränsle i form av komprimerad vätgas kan metanol (CH3OH)med betydligt högre energitäthet användas som bränsle istället. En reformer behöver då installeras som spjälkar metanolen till vätgas. Reformern tillsätts en blandning av lika delar metanol och destillerat vatten. Vätskan förångas och förs genom en katalysator av koppar och zinkoxid vid 250°C. Då bildas vätgas, koldioxid och kolmonoxid (ca 1 %) i en endotermisk reaktion. Gaserna förs sedan vidare till ett reningssteg där CO2 och CO separeras från vätgasen eftersom de är skadliga för bränslecellen. CO oxideras sedan i ytterligare ett steg till CO2.
För denna lösning krävs någon sorts system som antingen absorberar CO2 eller att gasen trycks ut utombords. Den studerade reformern är anpassad till atmosfärsförhållande. I AUV:n kommer den att drivas i ett slutet rum vilket medför att reformern behöver tillföras mindre mängder syrgas under processen för att oxidera CO. Denna förbrukning anses dock varaförsumbar i jämförelse med vad bränslecellen förbrukar.
4 Den erfordrade elenergimängden är hämtad från beräkningarna i kap. 4.3 Energiåtgång5 Bränslecellens verkningsgrad är medräknad för denna energimängd6 Baserad på den elenergimängd BC producerar
51
ReformerLeverantör: IdatechPrimärbränsle: metanolMått: 310x370x470 mmVikt: 36 kgEffektbehov 100 WVerkningsgrad η: 75 %[64]
Reaktioner i reformern: CH3OH + H2O + Q → CO2 + 3H2 + CO
CO + O2 → CO2
Totalreaktion: CH3OH + H2O → CO2 + 3H2
Med molekylvikterna insatta i cellreaktionen erhålls massandelarna för respektive ämne:
1 kg CH3OH + 0.56 kg H2O → 1.37 kg CO2 + 0.189 kg H2
Tillverkaren av den studerade reformern uppger att verkningsgraden %753
2 ==OHCH
H
LHVLHV
η .
Detta innebär att för varje kg CH3OH bildas 0.16 kg H2 som kan användas i bränslecellsprocessen. [64, 65]
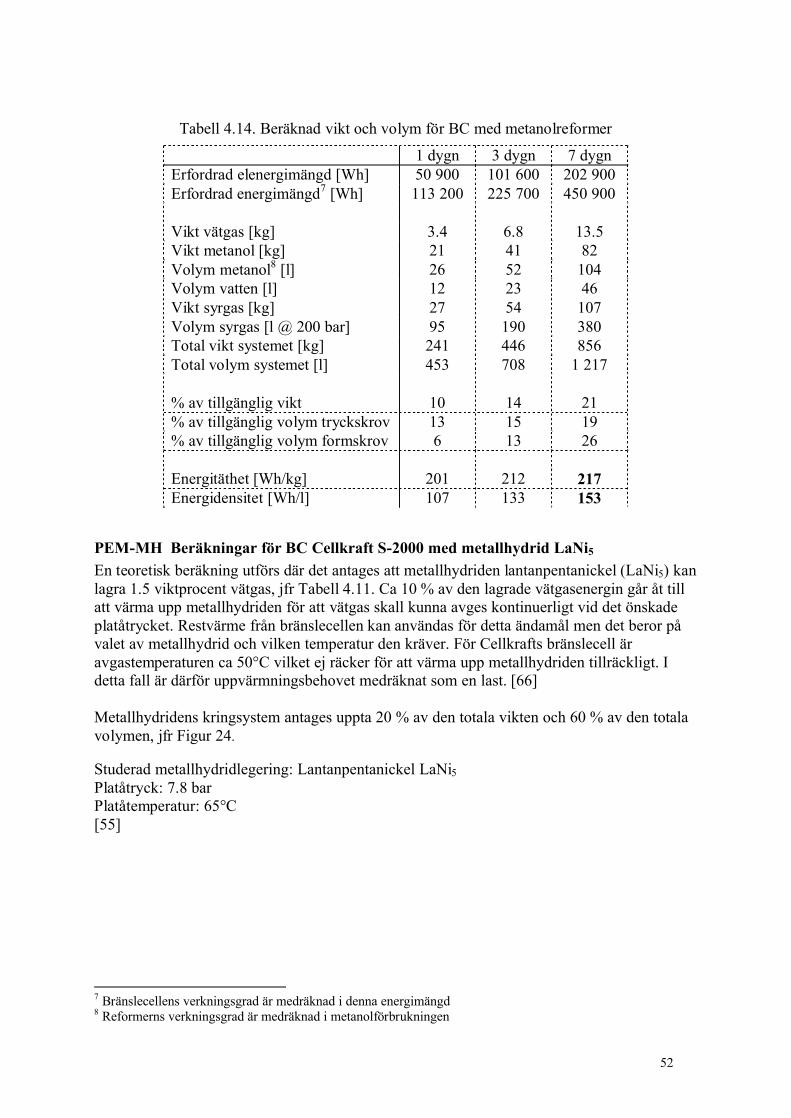
52
Tabell 4.14. Beräknad vikt och volym för BC med metanolreformer
1 dygn 3 dygn 7 dygnErfordrad elenergimängd [Wh] 50 900 101 600 202 900Erfordrad energimängd7 [Wh] 113 200 225 700 450 900
Vikt vätgas [kg] 3.4 6.8 13.5Vikt metanol [kg] 21 41 82Volym metanol8 [l] 26 52 104Volym vatten [l] 12 23 46Vikt syrgas [kg] 27 54 107Volym syrgas [l @ 200 bar] 95 190 380Total vikt systemet [kg] 241 446 856Total volym systemet [l] 453 708 1 217
% av tillgänglig vikt 10 14 21% av tillgänglig volym tryckskrov 13 15 19% av tillgänglig volym formskrov 6 13 26
Energitäthet [Wh/kg] 201 212 217Energidensitet [Wh/l] 107 133 153
PEM-MH Beräkningar för BC Cellkraft S-2000 med metallhydrid LaNi5
En teoretisk beräkning utförs där det antages att metallhydriden lantanpentanickel (LaNi5) kanlagra 1.5 viktprocent vätgas, jfr Tabell 4.11. Ca 10 % av den lagrade vätgasenergin går åt till att värma upp metallhydriden för att vätgas skall kunna avges kontinuerligt vid det önskade platåtrycket. Restvärme från bränslecellen kan användas för detta ändamål men det beror på valet av metallhydrid och vilken temperatur den kräver. För Cellkrafts bränslecell är avgastemperaturen ca 50°C vilket ej räcker för att värma upp metallhydriden tillräckligt. I detta fall är därför uppvärmningsbehovet medräknat som en last. [66]
Metallhydridens kringsystem antages uppta 20 % av den totala vikten och 60 % av den totala volymen, jfr Figur 24.
Studerad metallhydridlegering: Lantanpentanickel LaNi5Platåtryck: 7.8 barPlatåtemperatur: 65°C[55]
7 Bränslecellens verkningsgrad är medräknad i denna energimängd8 Reformerns verkningsgrad är medräknad i metanolförbrukningen
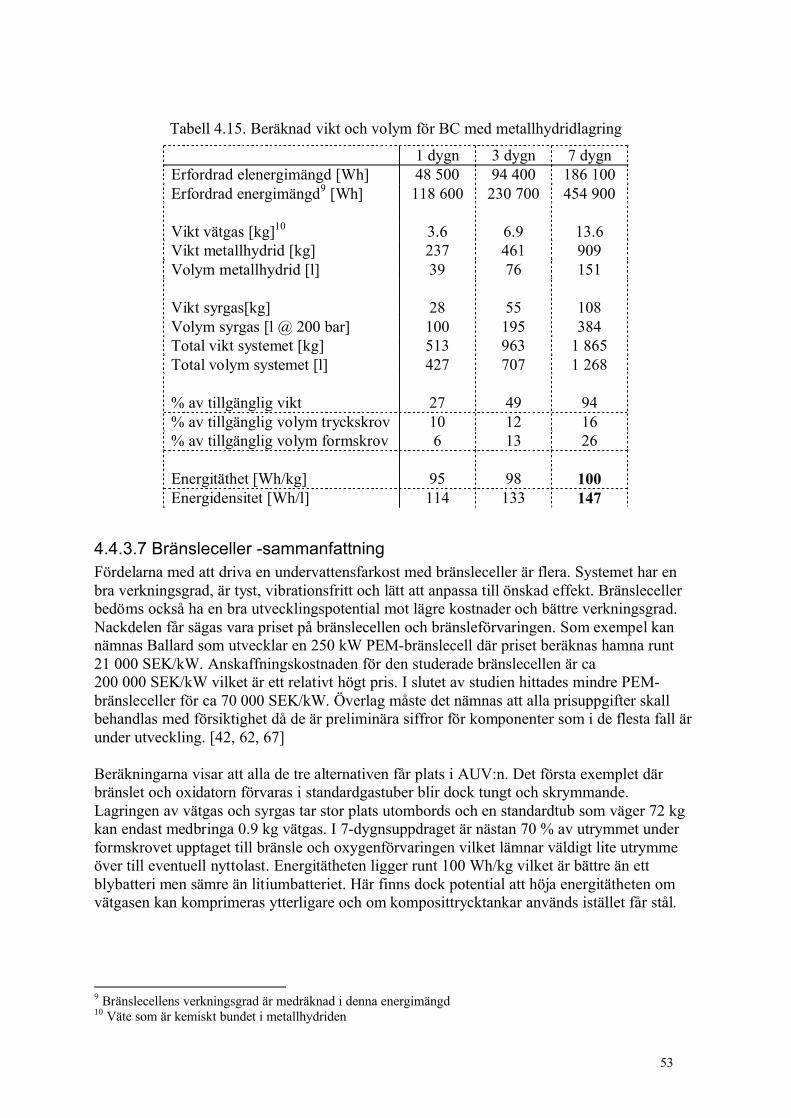
53
Tabell 4.15. Beräknad vikt och volym för BC med metallhydridlagring
1 dygn 3 dygn 7 dygnErfordrad elenergimängd [Wh] 48 500 94 400 186 100Erfordrad energimängd9 [Wh] 118 600 230 700 454 900
Vikt vätgas [kg]10 3.6 6.9 13.6Vikt metallhydrid [kg] 237 461 909Volym metallhydrid [l] 39 76 151
Vikt syrgas[kg] 28 55 108Volym syrgas [l @ 200 bar] 100 195 384Total vikt systemet [kg] 513 963 1 865Total volym systemet [l] 427 707 1 268
% av tillgänglig vikt 27 49 94% av tillgänglig volym tryckskrov 10 12 16% av tillgänglig volym formskrov 6 13 26
Energitäthet [Wh/kg] 95 98 100Energidensitet [Wh/l] 114 133 147
4.4.3.7 Bränsleceller -sammanfattningFördelarna med att driva en undervattensfarkost med bränsleceller är flera. Systemet har en bra verkningsgrad, är tyst, vibrationsfritt och lätt att anpassa till önskad effekt. Bränsleceller bedöms också ha en bra utvecklingspotential mot lägre kostnader och bättre verkningsgrad. Nackdelen får sägas vara priset på bränslecellen och bränsleförvaringen. Som exempel kan nämnas Ballard som utvecklar en 250 kW PEM-bränslecell där priset beräknas hamna runt 21 000 SEK/kW. Anskaffningskostnaden för den studerade bränslecellen är ca 200 000 SEK/kW vilket är ett relativt högt pris. I slutet av studien hittades mindre PEM-bränsleceller för ca 70 000 SEK/kW. Överlag måste det nämnas att alla prisuppgifter skall behandlas med försiktighet då de är preliminära siffror för komponenter som i de flesta fall är under utveckling. [42, 62, 67]
Beräkningarna visar att alla de tre alternativen får plats i AUV:n. Det första exemplet där bränslet och oxidatorn förvaras i standardgastuber blir dock tungt och skrymmande. Lagringen av vätgas och syrgas tar stor plats utombords och en standardtub som väger 72 kg kan endast medbringa 0.9 kg vätgas. I 7-dygnsuppdraget är nästan 70 % av utrymmet underformskrovet upptaget till bränsle och oxygenförvaringen vilket lämnar väldigt lite utrymme över till eventuell nyttolast. Energitätheten ligger runt 100 Wh/kg vilket är bättre än ett blybatteri men sämre än litiumbatteriet. Här finns dock potential att höja energitätheten om vätgasen kan komprimeras ytterligare och om komposittrycktankar används istället får stål.
9 Bränslecellens verkningsgrad är medräknad i denna energimängd10 Väte som är kemiskt bundet i metallhydriden
54
Det andra exemplet används metanol som primärbränslevilket ger dubbelt så hög energitäthet, ca 200 Wh/kg. Denna variant är dock mer tekniskt komplicerad då reformermodulen ingår i systemet. Används reformerteknik måste man även tänka på att CO2 måste tryckas ut från farkosten med någon typ av kompressor samt ett viktkompensationssystem.
I det tredje fallet med metallhydrid kan man utläsa att det volymsmässigt är likvärt med metanolexemplet med skillnaden att det är mycket tyngre. Energidensiteten baserat på volymen är med andra ord likvärdig men sämre för den massbaserade. I 7-dygnsuppdraget är vikten uppe i 94 % av det tillgängliga för metallhydridlagringen mot 21 % för metanolexemplet.
Säkerhetsaspekterna vid lagring av vätgas ska ej förringas. Gasen är färg- och luktlös och är brännbar i ett stort koncentrationsspann, från 4 % till 75 % och explosiv i regionen från 13 till 59 volymprocent. Gasens snabba diffusion är också ett problem i slutna rum, den sprids snabbt och fyller hela rummet vid ett läckage. Svavelbaserade lukttillsatser kan ej heller användas då de förgiftar bränslecellens membran. Vätgasen har även en förmåga att diffundera in i metaller och förspröda dem. Materialvalet av komponenterna till systemet måste därför göras med försiktighet.
Metanol är en starkt giftig vätska och är farlig vid förtäring, inandning och hudkontakt. Metanol är mycket brandfarligt, brinner med en osynlig låga och har en låg flampunkt, 11°C. Metanolångor är explosiva i luft i koncentrationer mellan 6 och 36 volymprocent. Vätskan reagerar även explosivt med väteperoxid vilket man måste vara uppmärksam på om metanolen förvaras i en ubåt där väteperoxid hanteras. Vätskan har också en korrosiv verkan på metaller och gummi. [68]
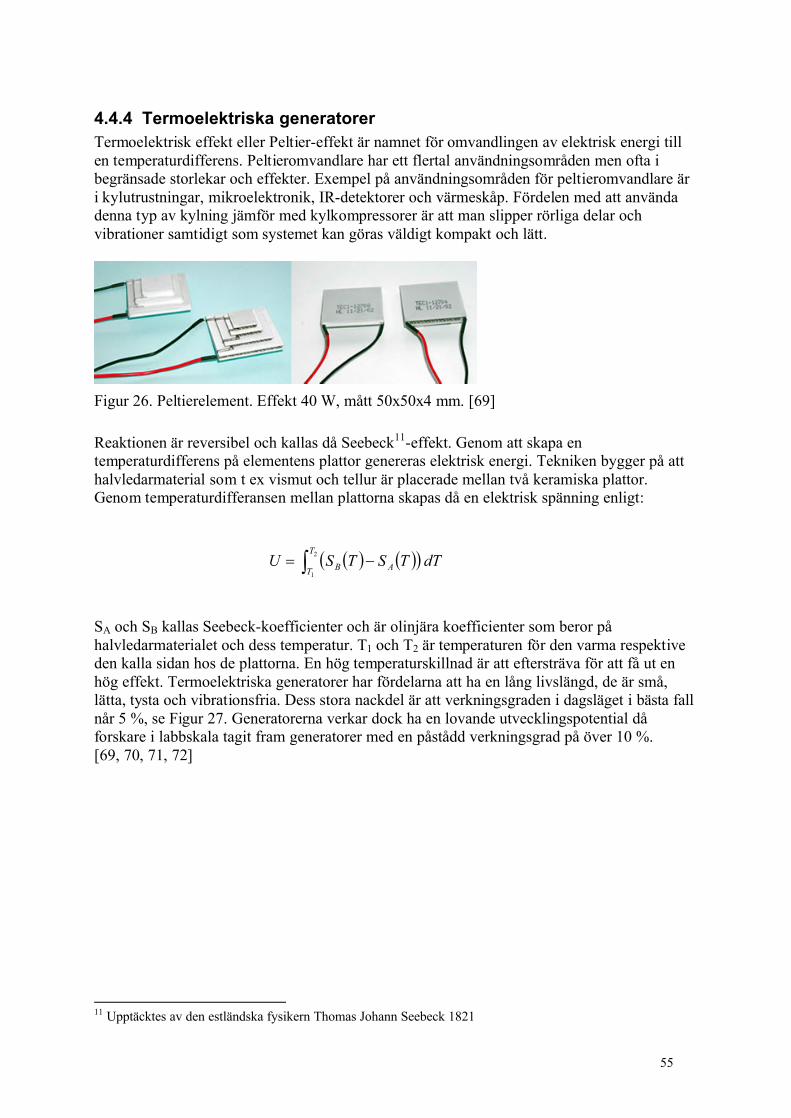
55
4.4.4 Termoelektriska generatorerTermoelektrisk effekt eller Peltier-effekt är namnet för omvandlingen av elektrisk energi till en temperaturdifferens. Peltieromvandlare har ett flertal användningsområden men ofta i begränsade storlekar och effekter. Exempel på användningsområden för peltieromvandlare är i kylutrustningar, mikroelektronik, IR-detektorer och värmeskåp. Fördelen med att använda denna typ av kylning jämför med kylkompressorer är att man slipper rörliga delar och vibrationer samtidigt som systemet kan göras väldigt kompakt och lätt.
Figur 26. Peltierelement. Effekt 40 W, mått 50x50x4 mm. [69]
Reaktionen är reversibel och kallas då Seebeck11-effekt. Genom att skapa en temperaturdifferens på elementens plattor genereras elektrisk energi. Tekniken bygger på att halvledarmaterial som t ex vismut och tellur är placerade mellan två keramiska plattor.Genom temperaturdifferansen mellan plattorna skapas då en elektrisk spänning enligt:
( ) ( )( ) dTTSTSUT
T AB∫ −= 2
1
SA och SB kallas Seebeck-koefficienter och är olinjära koefficienter som beror på halvledarmaterialet och dess temperatur. T1 och T2 är temperaturen för den varma respektive den kalla sidan hos de plattorna. En hög temperaturskillnad är att eftersträva för att få ut en hög effekt. Termoelektriska generatorer har fördelarna att ha en lång livslängd, de är små, lätta, tysta och vibrationsfria. Dess stora nackdel är att verkningsgraden i dagsläget i bästa fall når 5 %, se Figur 27. Generatorerna verkar dock ha en lovande utvecklingspotential då forskare i labbskala tagit fram generatorer med en påstådd verkningsgrad på över 10 %.[69, 70, 71, 72]
11 Upptäcktes av den estländska fysikern Thomas Johann Seebeck 1821
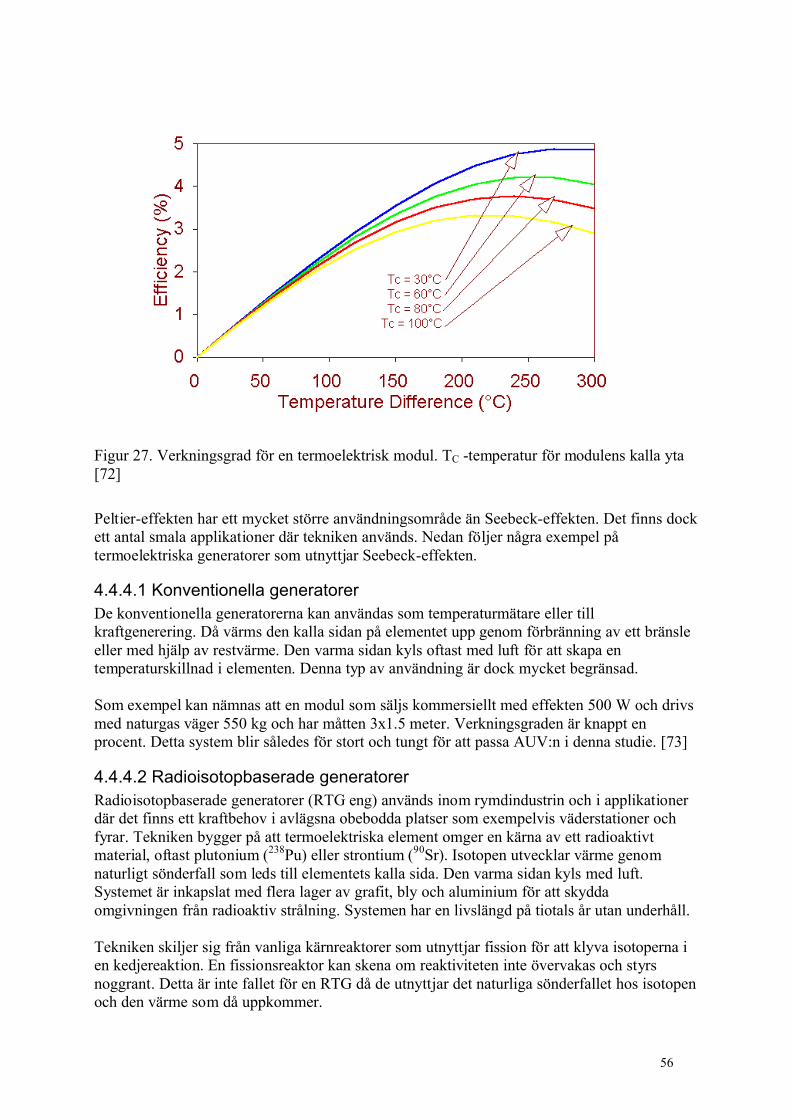
56
Figur 27. Verkningsgrad för en termoelektrisk modul. TC -temperatur för modulens kalla yta[72]
Peltier-effekten har ett mycket större användningsområde än Seebeck-effekten. Det finns dock ett antal smala applikationer där tekniken används. Nedan följer några exempel på termoelektriska generatorer som utnyttjar Seebeck-effekten.
4.4.4.1 Konventionella generatorerDe konventionella generatorerna kan användas som temperaturmätare eller till kraftgenerering. Då värms den kalla sidan på elementet upp genom förbränning av ett bränsle eller med hjälp av restvärme. Den varma sidan kyls oftast med luft för att skapa en temperaturskillnad i elementen. Denna typ av användning är dock mycket begränsad.
Som exempel kan nämnas att en modul som säljs kommersiellt med effekten 500 W och drivs med naturgas väger 550 kg och har måtten 3x1.5 meter. Verkningsgraden är knappt en procent. Detta system blir således för stort och tungt för att passa AUV:n i denna studie. [73]
4.4.4.2 Radioisotopbaserade generatorerRadioisotopbaserade generatorer (RTG eng) används inom rymdindustrin och i applikationer där det finns ett kraftbehov i avlägsna obebodda platser som exempelvis väderstationer och fyrar. Tekniken bygger på att termoelektriska element omger en kärna av ett radioaktivt material, oftast plutonium (238Pu) eller strontium (90Sr). Isotopen utvecklar värme genom naturligt sönderfall som leds till elementets kalla sida. Den varma sidan kyls med luft. Systemet är inkapslat med flera lager av grafit, bly och aluminium för att skydda omgivningen från radioaktiv strålning. Systemen har en livslängd på tiotals år utan underhåll.
Tekniken skiljer sig från vanliga kärnreaktorer som utnyttjar fission för att klyva isotoperna i en kedjereaktion. En fissionsreaktor kan skena om reaktiviteten inte övervakas och styrs noggrant. Detta är inte fallet för en RTG då de utnyttjar det naturliga sönderfallet hos isotopenoch den värme som då uppkommer.
57
Tekniken används främst i Ryssland men även USA har haft denna typ av generatorer. De moduler som används civilt idag är under avveckling främst pga att de innehåller stöldbegärligt material och att de nått slutet av sin livslängd. Det ställs stora krav på sluthanteringen av dessa moduler då de ger upphov till skadlig strålning under väldigt lång tid. RTG:er ersätts nu av sol- eller bränsleceller. [74]
4.4.4.3 Termoelektriska generatorer -sammanfattningTermoelektriska generatorer passar bäst där det finns ett lågt effektbehov under en lång tid.Systemet kan göras väldigt enkelt och stabilt med en brännkammare och en kylanordning. I de speciella applikationer där de används för elgenerering uppvägs ofta den dåligaverkningsgraden hos de termoelektriska elementen med en isotopbaserad värmekälla med hög energitäthet. Det ter sig dock orealistiskt att använda isotopbaserad teknik i en AUV då nuvarande lagstiftning hindrar detta samtidigt som det finns betydande säkerhetsrisker med denna typ av energikälla. Konventionella generatorer har en för dålig verkningsgrad och systemet blir för stort för att passa den studerade AUV:n.
4.4.5 StirlingStirlingmotorn påminner om en konventionell förbränningsmotor med den skillnaden att gasen i cylindrarna verkar i en sluten cykel. Förbränningen av bränslet sker utanför cylindrarna och värmen tillförs eller bortförs till cylindrarna med hjälp av en värmeväxlare.
Stirlingprocessen kan beskrivas enkelt genom att studera två kolvar där den en rör sig i en kall volym och den andra i en varm volym. Arbetsgasen, som vanligen är helium, rör sig fram och tillbaka mellan de varma eller kalla ytorna i ett slutet cylindersystem och kyls eller värms då upp. Arbetsgasen passerar en regenerator mellan cylindrarna för att lagra värme då gasen rör sig från den varma till den kalla sidan och avger värme när arbetsgasen återvänder. De två kolvarna är mekaniskt kopplade till varandra för att uppnå rätt volymförhållande.
Mycket utvecklingsarbete genomfördes under 70-talet och stirlingmotorer testades framför allt inom transportsektorn. Motorn fick då ingen större genomslagskraft pga en för höganskaffnings- och underhållskostnad. Idag används stirlingmotorn i starkt nischade områden som i luftoberoende framdrivningsmaskineri i ubåtar och i ett antal solcellsanläggningar.
Kockums AB har sedan 70-talet bedrivit ett extensivt utvecklingsarbete för att ubåtsanpassa stirlingtekniken. År 1988 installerades ett luftoberoende stirlingmotorsystem i den svenska ubåten Näcken med stor framgång. Tekniken har förbättrats kontinuerligt av Kockums AB och systemet används nu i ett flertal ubåtar både i Sverige och internationellt.
Kockums stirlingmotor drivs med lågsvavlig diesel och syrgas som lagras i flytande form i kryotankar i ubåten. Förbränningstryck är anpassat så att ubåten kan gå ner till fullt dykdjuputan behov av en energikrävande avgaskompressor. Avgaserna består till största delen av CO2och H2O och blandas ut med ubåtens utgående kylvatten. Motorn har en effekt på ca 75 kW och en verkningsgrad på drygt 30 %. Motorn har en stort sätt bibehållen verkningsgrad vid dellastkörning. [75]
Stirlingmotorn har av Kockums tillverkats i effekter ner till 15 kW. Denna motor är dock onödigt stor effektmässigt för att passa i den studerade farkosten (Pmax=4 kW). Det är knappast meningsfullt att tillverka en stirlingmotor för så små effekter då motorns

58
komplexitet och utrymmeskrävande kringsystem kommer att uppta en väldigt stor plats vilket kommer att resultera i en låg energitäthet för systemet.
I de fall där effektbehovet överstiger 15 kW är stirlingmotorn ett bra alternativ då systemet är väl utprovat i undervattenssammanhang och har en hygglig verkningsgrad. Dess autonoma egenskaper får sägas vara bra då driften av motorn och dess kringsystem är helt automatiserad. Livscykelkostnaden för stirlingsystemet ligger mellan 100 – 200 kr/kWh. Stirlings energitäthet är volymsbaserat ca 220 Wh/l och massbaserat ca 330 Wh/kg.
FördelarDrivs med kommersiella bränslen och oxidantLåg ljudnivå och vibrationerSnabb bunkringVäl provad teknik
NackdelarHög kostnad
4.4.6 KretsdieselEn kretsdieselmotor fungerar i stor sätt som en vanlig dieselmotor men den utnyttjar av naturliga skäl ej atmosfäriskt syre i undervattenssammanhang. Vanligtvis drivs en dieselcykel med ett stort luftöverskott men i kretsdieseln cirkulerar istället en ädelgas med inblandning av ren syrgas som medföres farkosten, ofta i flytande form. Efter förbränningen i cylindern förs avgaserna genom en scrubber och kyls ner samtidigt som CO2 skiljs av och blandas ut med det utgående kylvattnet. Gasen tillförs sedan syrgas igen och förs in i motorn för en ny förbränningscykel.
En kretsdiesel har en sämre verkningsgrad än en konventionell dieselmotor pga att CO2-avskiljningen är energikrävande samt att motorn drivs med ett motryck. Avgassepareringen kan ta ca 10 % av motoreffekten i anspråk och verkningsgraden för en kretsdiesel ligger runt 30 %. Systemet har installerats och provats i en ubåt men har aldrig sålts kommersiellt. Signaturerna hos kretsdieselmotorn är höga, motorn bullrar och vibrerar avsevärt mycket mer än ex stirlingmotorn. I en AUV vill man hålla signaturerna på ett minimum och därför kan detta energisystem ej rekommenderas. [76, 77, 78]
FördelarKommersiella bränslen och oxidantSnabb bunkring
NackdelarHög kostnadLåg verkningsgradBuller och vibrationerTekniskt komplicerat
59
4.4.7 Ångturbiner I undervattenssammanhang har en ubåtsanpassad Rankine-cykel tagits fram av DCN i Frankrike. Systemet har fått namnet MESMA (Module d'Energie Sous-Marin Autonome) och finns idag installerat i en pakistansk ubåt. Ångturbinen har en effekt på ca 200 kW och drivs med etanol och syrgas. Systemets fördel är dess relativt låga ljudnivå men den har flera nackdelar, bl a höga signaturer från kylvattnet, dålig verkningsgrad (~20 %), och ett tekniskt komplicerat och dyrt maskineri. Systemets dåliga verkningsgrad samt problemet med att skala ner detta system till en 4 kW modul medför att detta system ej kan rekommenderas. [78, 79]
4.4.8 Övriga energiomvandlareGasturbinerGasturbiner består enkelt uttryckt av en kompressor, en brännkammare och en turbin. Kompressorn brukar utnyttja samma axel som turbinen. Kompressorn tar in atmosfärsluft och komprimerar den vilket medför att trycket och temperaturen höjs. I brännkammaren höjs temperaturen ytterligare och gaserna får sedan expandera genom turbinen vilket ger en axeleffekt som kan utnyttjas av en elgenerator.
Gasturbinernas huvudsakliga användningsområden är som flygplansmotorer, huvudmaskineri till snabbgående ytfartyg och till stationär kraftgenerering. Gasturbiner är komplicerade och dyra maskiner som används där man vill uppnå höga effekter. Försök har gjorts med slutna gasturbincykler i undervattenssammanhang men de har ej fått någon genomslagskraft. Tekniken är komplicerad, utrymmeskrävande, har en dålig verkningsgrad vid dellast och är väldigt kostsam vilket gör att systemet ej är aktuellt för den studerade AUV:n. [77, 80, 81]
BensinmotorerBensinmotorer har aldrig varit aktuella i ubåtssammanhang av ett flertal orsaker. Dieselmotorn har en högre verkningsgrad än bensinmotorn och är dessutom mer driftsäker samtidigt som man vill slippa hantera bensin ombord pga dess ytterst brandfarliga egenskaper.

60
5 RESULTATI Tabell 5.1 visas alla de studerade energisystemens vikt- och volymanspråk för de olika operationsprofilerna. Dessa siffror ska vara så låga som möjligt då resterande utrymme kan användas till nyttolast. Data redovisas för de tre olika operationsprofilerna som beskrivs i kapitlet 4.3 Energiåtgång. För bränslecellerna redovisas siffrorna i två kolumner då systemet tar upp plats både i tryckskrovet och i formskrovet. Systemens anskaffningskostnad och livscykelkostnad har också uppskattats.
Figur 28 visar en sammanställning av energitätheten. Stirlingmotorn är ej aktuell för den studerade AUV:n men visas ändå som en jämförelse med de andra systemen. Stirlings energitäthet har baserats på värden framräknade från en generisk ubåt. Hade systemet installerats i en AUV hade energitätheten sannolikt blivit lägre vilket man bör beakta när man jämför siffrorna i diagrammet.
I diagrammen används sedan innan följande förkortningar för bränslecellerna:
PEM-k PEM-bränslecell som använder komprimerad vätgas som bränsle och komprimerad syrgas som oxidator.
PEM-m PEM-bränslecell som använder metanol som primärbränsle och komprimerad syrgas som oxidator.
PEM-MH PEM-bränslecell med väte bundet i metallhydrid som bränsle och komprimerad syrgas som oxidator.
I Figur 29 visas bränslecellernas fördel jämfört med batterierna där energitätheten visas som en funktion av uthålligheten. Energitätheten ökar för bränslecellerna eftersom kringsystemen procentuellt upptar mindre plats när bränslemängden ökar.
Figur 30 visar den schematiska energitätheten för de olika systemen. Figuren beskriver energitätheten i ett bredare spektrum med data inhämtade från ett antal leverantörer.
Figur 31 och Figur 32 visar batteriernas linjära mass- och volymanspråk som funktion av uthålligheten.
Figur 33 visar AUV:ns räckvidd som funktion av hastigheten. Diagrammet baseras på antagandet att halva tryckskrovsutrymmet används för batterilagring vilket medger en lagrad energimängd på 100 kWh. Kringsystemen har en total effekt på 600 W.
Figur 34 illustrerar bränslecellernas vikt och volymanspråk vid en ökad uthållighet. Det visarsig att farkosten snabbt blir masskritisk med metallhydridkonfigurationen (PEM-MH) och volymkritisk med komprimerad bränsleförvaring (PEM-k). Slutligen visas schematiskt inom vilka effekt- och uthållighetsområden respektive energisystem skulle kunna passa i en AUV av den studerade storleken (se Figur 35).
Resultaten baseras på tidigare utförda beräkningar. Vissa komponenter som undersökts i studien är fortfarande under utveckling och säljs ej ännu för industriella ändamål. Viss försiktighet skall därför iakttas när man betraktar verkningsgrader, prestanda och kostnad förde olika energisystemen.
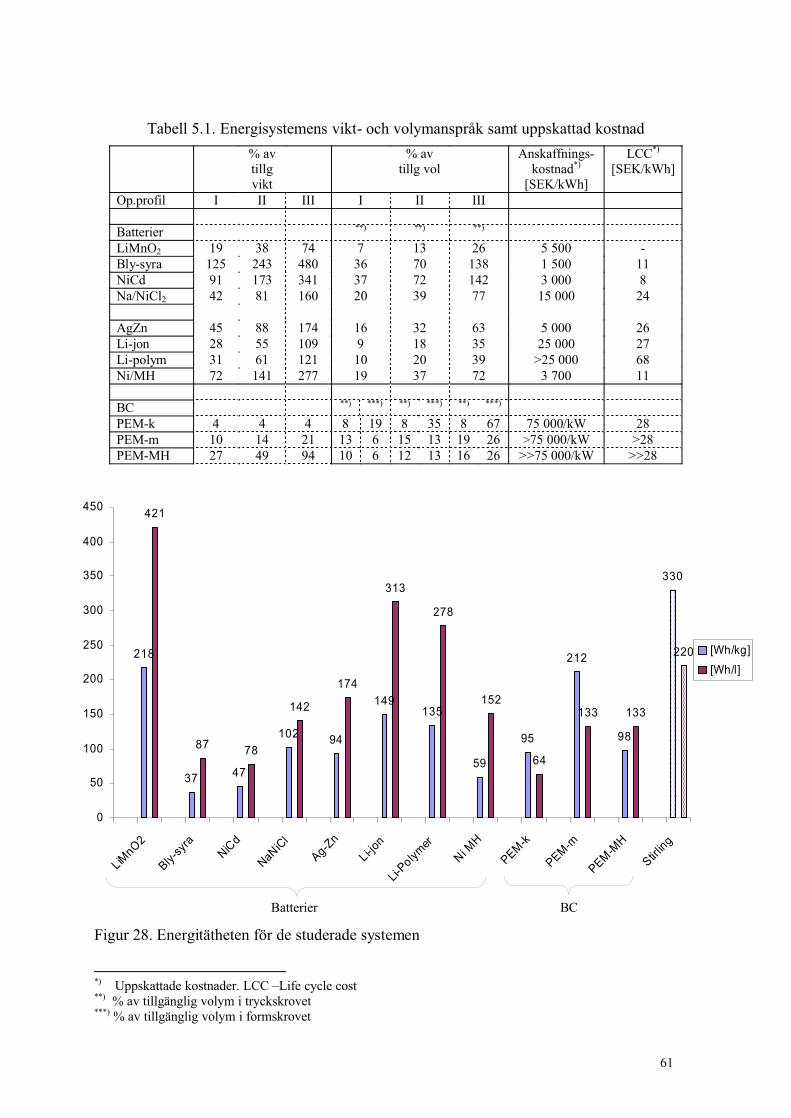
61
Tabell 5.1. Energisystemens vikt- och volymanspråk samt uppskattad kostnad% av tillg vikt
% av tillg vol
Anskaffnings-kostnad*)
[SEK/kWh]
LCC*)
[SEK/kWh]
Op.profil I II III I II III
Batterier **) **) **)
LiMnO2 19 38 74 7 13 26 5 500 -Bly-syra 125 243 480 36 70 138 1 500 11NiCd 91 173 341 37 72 142 3 000 8Na/NiCl2 42 81 160 20 39 77 15 000 24
AgZn 45 88 174 16 32 63 5 000 26Li-jon 28 55 109 9 18 35 25 000 27Li-polym 31 61 121 10 20 39 >25 000 68Ni/MH 72 141 277 19 37 72 3 700 11
BC **) ***) **) ***) **) ***)
PEM-k 4 4 4 8 19 8 35 8 67 75 000/kW 28PEM-m 10 14 21 13 6 15 13 19 26 >75 000/kW >28PEM-MH 27 49 94 10 6 12 13 16 26 >>75 000/kW >>28
Figur 28. Energitätheten för de studerade systemen
*) Uppskattade kostnader. LCC –Life cycle cost**) % av tillgänglig volym i tryckskrovet***) % av tillgänglig volym i formskrovet
218
37 47
102 94
149135
59
95
212
98
330
421
87 78
142
174
313
278
152
64
133 133
220
0
50
100
150
200
250
300
350
400
450
LiMnO2
Bly-sy
raNiCd
NaNiCl
Ag-Zn
Li-jon
Li-Polym
erNi M
HPEM-k
PEM-m
PEM-MH
Stirling
[Wh/kg][Wh/l]
Batterier BC
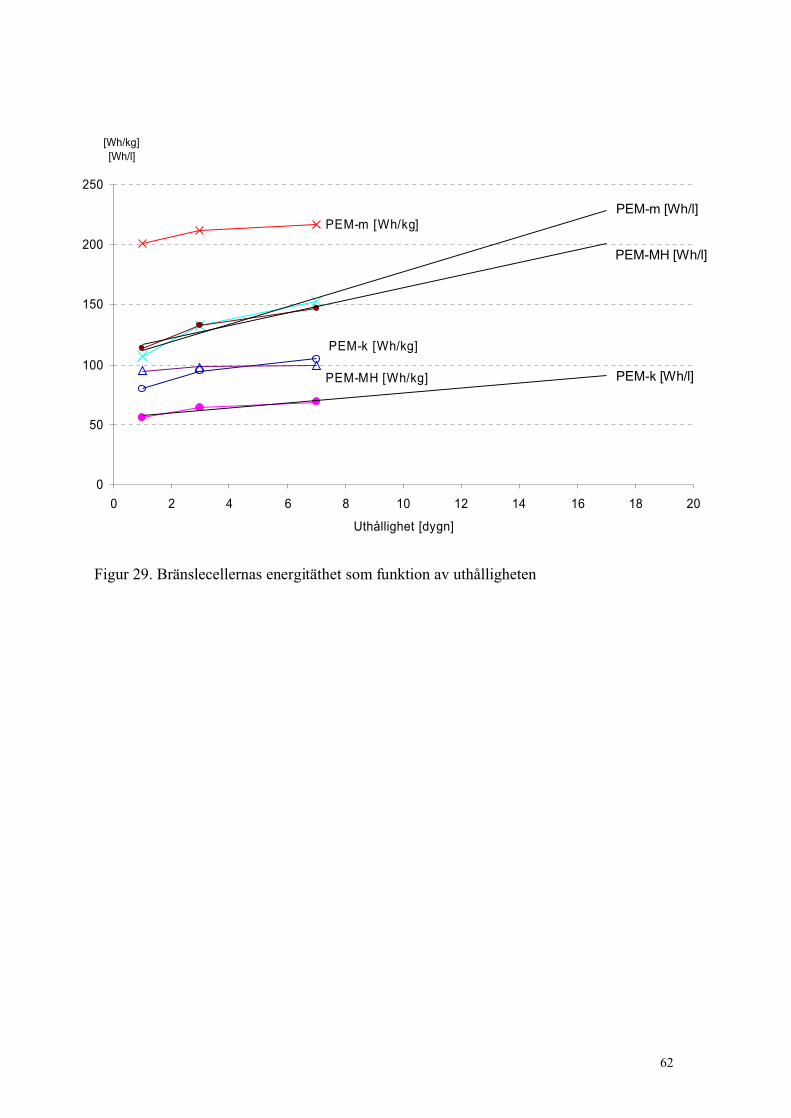
62
Figur 29. Bränslecellernas energitäthet som funktion av uthålligheten
PEM-k [Wh/kg]
PEM-m [Wh/kg]
PEM-MH [Wh/kg]
0
50
100
150
200
250
0 2 4 6 8 10 12 14 16 18 20
Uthållighet [dygn]
[Wh/kg][Wh/l]
PEM-m [Wh/l]
PEM-MH [Wh/l]
PEM-k [Wh/l]
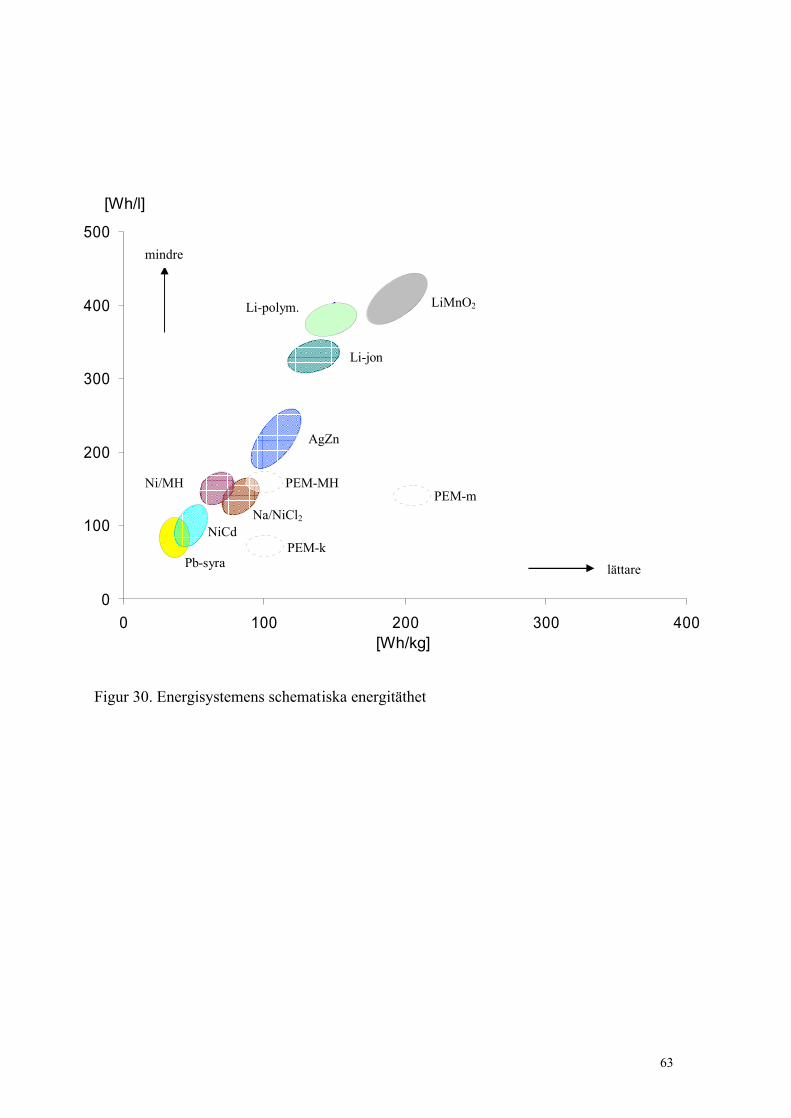
63
Figur 30. Energisystemens schematiska energitäthet
Energidensitet
0
100
200
300
400
500
0 100 200 300 400
[Wh/kg]
[Wh/l]
Pb-syra
LiMnO2
NiCdNa/NiCl2
AgZn
Li-jon
Li-polym.
Ni/MHPEM-m
PEM-MH
PEM-k
[Wh/l]
[Wh/kg]
lättare
mindre
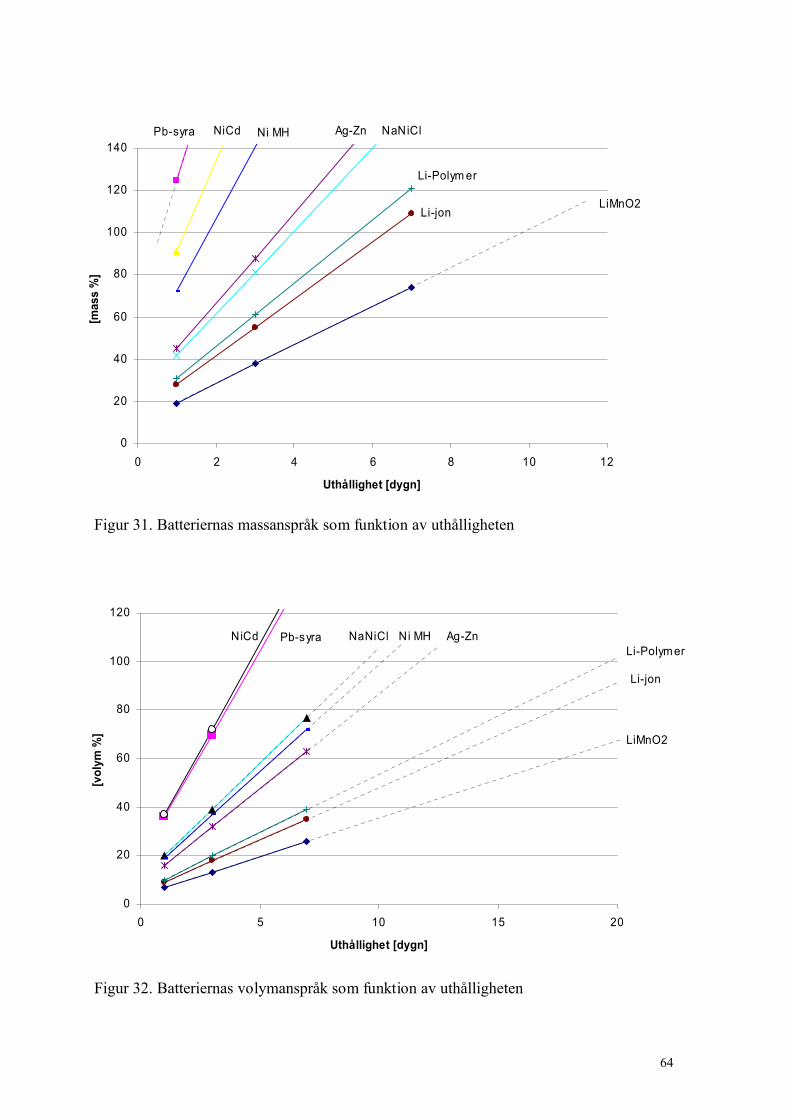
64
Figur 31. Batteriernas massanspråk som funktion av uthålligheten
Figur 32. Batteriernas volymanspråk som funktion av uthålligheten
LiMnO2
Pb-syra NiCd NaNiClAg-Zn
Li-jon
Li-Polym er
Ni MH
0
20
40
60
80
100
120
140
0 2 4 6 8 10 12
Uthållighet [dygn]
[mas
s %
]
LiMnO2
Pb-syraNiCd NaNiCl Ag-Zn
Li-jon
Li-PolymerNi MH
0
20
40
60
80
100
120
0 5 10 15 20
Uthållighet [dygn]
[vol
ym %
]

65
Figur 33. AUV:ns räckvidd som funktion av hastigheten
0
50
100
150
200
250
300
350
0 2 4 6 8 10 12
Hastighet [knop]
Räck
vidd
[nau
t mil]
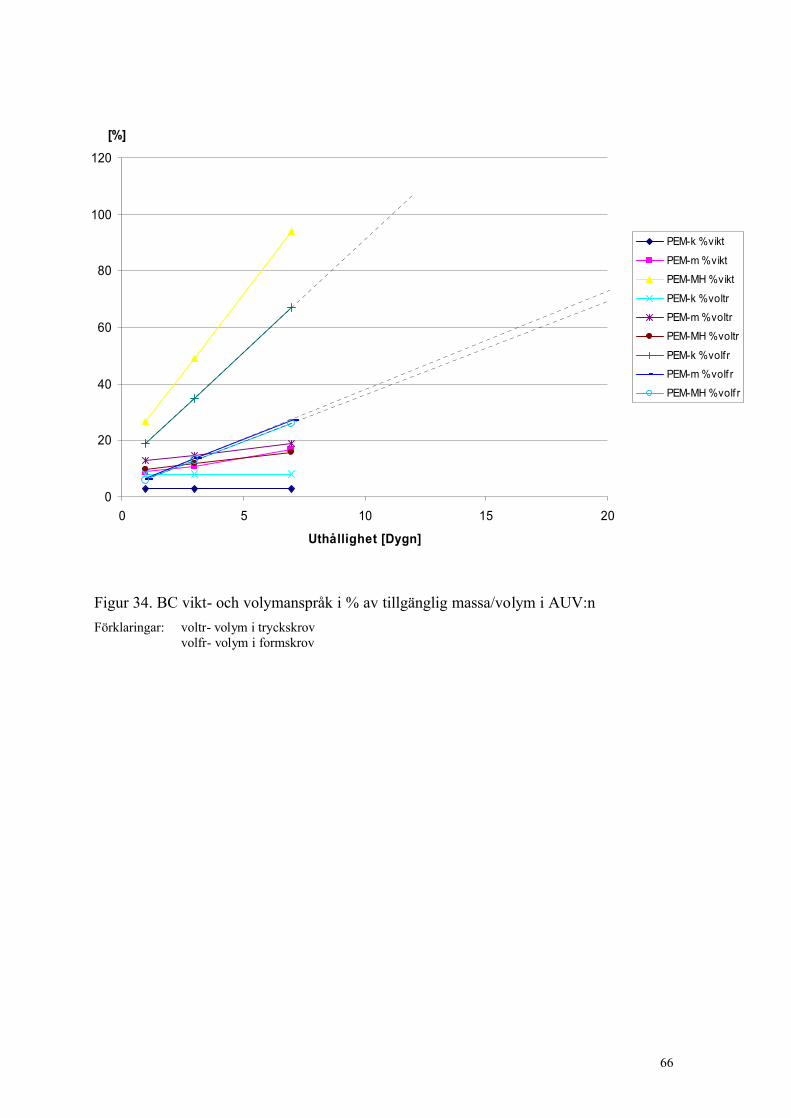
66
Figur 34. BC vikt- och volymanspråk i % av tillgänglig massa/volym i AUV:nFörklaringar: voltr- volym i tryckskrov
volfr- volym i formskrov
0
20
40
60
80
100
120
0 5 10 15 20
Uthållighet [Dygn]
[%]
PEM-k %vikt
PEM-m %vikt
PEM-MH %vikt
PEM-k %voltr
PEM-m %voltr
PEM-MH %voltr
PEM-k %volfr
PEM-m %volf r
PEM-MH %volf r
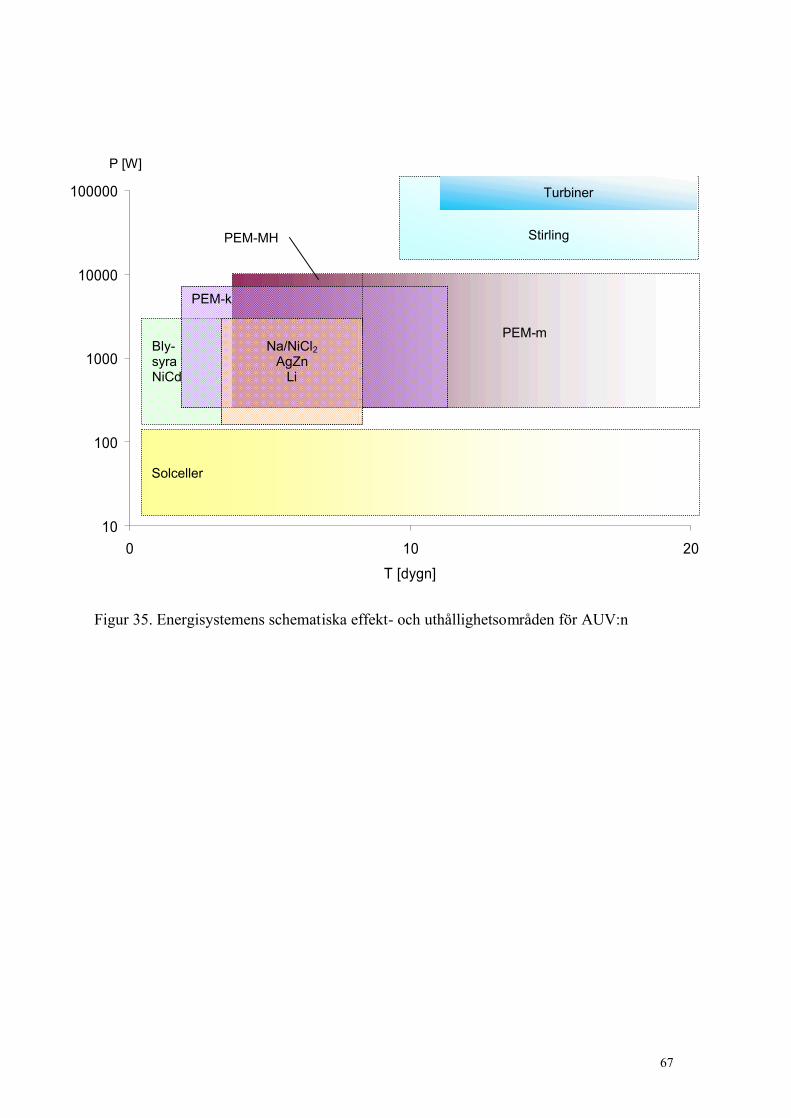
67
Figur 35. Energisystemens schematiska effekt- och uthållighetsområden för AUV:n
10
100
1000
10000
100000
0 10 20T [dygn]
Bly-syraNiCd
Solceller
Stirling
Turbiner
PEM-m
PEM-k
Na/NiCl2AgZn
Li
P [W]
PEM-MH
68
6 SLUTSATSERBeräkningarna i kapitlet 4.3 Energiåtgång som har legat som grund för dimensioneringen av energisystemen visar att energiåtgången är liknande de befintliga farkosterna i samma storlek som beskrivits i kapitlet 2.3 Dagens AUV:er. De antaganden som gjordes för att simulera energiåtgången visade sig vara tämligen korrekta.
Med resultaten och tidigare gjorda konstateranden från kapitlet 4.4 Energianalys framgår det att det ej är meningsfullt eller ekonomiskt försvarbart att använda primärbatterier, bly-syraeller NiCd-batterier, Na/NiCl2, AgZn, solceller, termoelektriska generatorer eller förbränningsmotorer i den studerade farkosten ställt mot kravanalysen.
Solceller skulle kunna vara en lösning för en undervattensfarkost med ett långt uthållighetsbehov men med ett mycket lågt effektbehov. Det är dock ej fallet med AUV:n i denna studie där energibehovet vida överstiger det som är möjligt att ackumulera med hjälp av solceller. Därför är denna lösning ej ett alternativ för AUV:n.
Konventionella termoelektriska generatorer har en för dålig verkningsgrad och isotopbaserade generatorer är inte aktuella pga dålig verkningsgrad och att nuvarande lagstiftning hindrar användning av denna typ av energisystem.
Stirlingmotorn är inte aktuell i en undervattensfarkost av den storlek som behandlas i denna studie. Stirlingmoduler kan först bli aktuella när effektbehovet överstiger ca 15 kW. Kretsdieselmotorn kan knappast rekommenderas då signaturerna från denna motortyp är höga samtidigt som ett fungerande system aldrig sålts kommersiellt. Ång- och gasturbiner är för stora och dyra system och har en begränsad verkningsgrad vilket gör att dessa system ej kan förordas. Bensinmotorer har aldrig varit aktuella heller då ett realistiskt alternativ för sluten drift ej är känt.
Vad gäller batterierna blir det ohållbart att använda primärbatterier vid det aktuella energibehovet. Att använda två ton engångsbatterier mellan uppdragen anses vara orealistiskt både hanteringsmässigt och ekonomiskt. Bly-syra- och NiCd-batterier har en låg energitäthet och blir både vikt- och volymkritiska för de olika operationsprofilerna.
Zebra-batteriet (Na/NiCl2) har en tämligen fördelaktig energitäthet men ett antal nackdelar. Batteriet måste värmas upp vid drift vilket är negativt verkningsgradsmässigt sätt, det är dyrt och det ställs ett antal säkerhetsmässiga frågetecken när natrium och en 300-gradig elektrolyt ska förvaras i farkosten. Med dessa konstaterande bortsållas även denna kandidat.
AgZn-batteriet har en bra energidensitet men är dyrt och har dåliga lagrings- och livslängdsegenskaper. Batteriet klarar exempelvis bara av ca 50 laddningscykler. Kostnadsmässigt kan AgZn verka ha ett någorlunda modest inköpspris jämfört med energitätheten men dess korta livslängd gör att kostnaden per kWh under dess livslängd blir hög. Därför kan dessa batterier ej heller rekommenderas.
De tre återstående batterityperna Li-jon, Li-polymer och Ni/MH är intressanta. De blir viktskritiska för det längsta uppdraget men klarar sig volymmässigt sett. Litiumbatterierna har en väldigt hög energitäthet, fyra gånger så hög som blybatteriet, och en bra livslängd. Nackdelen är kostnaden för batteriet. De är visserligen fyra gånger så energitätt som blybatteriet men anskaffningskostnaden är samtidigt femton gånger högre.
69
Man skall således ha starka skäl att välja dessa batterier, exempelvis extrem utrymmesbrist eller liknande. Priserna på dessa batterier sjunker dock förhoppningsvis framöver. Man bör även beakta säkerhetsaspekterna för denna batterityp. Olyckor har inträffat då litiumbatterier som används i mobiltelefoner och annan bärbar utrustning har exploderat. Antalet olyckor är väldigt få om man jämför med antalet batterier som används men innan orsakerna till haverierna är kända bör batteritypen behandlas med försiktighet.
Nickelmetallhydridbatteriet har både en rimlig energitäthet och en rimlig kostnad. Batterierna är stabila och innehåller inga extremt reaktiva ämnen. De har funnits på marknaden ett antal år och har i stort sätt ersatt NiCd-batteriet.
Som sammanfattning av batterisystemen kan man nämna att Ni/MH och Li-batteriet är de mest intressanta alternativen. Ni/MH har en hygglig energitäthet och ett modest pris. Har man en farkost med begränsat utrymme och är beredd att ta en större kostnad kan man rekommendera litiumbatteriet. Förhoppningsvis sjunker också kostnaden för denna batterityp framöver.
Bränslecellsalternativen skulle mycket väl kunna fungera i den studerade AUV:n men de blir kostsamma. Alla de tre alternativen (PEM-k, PEM-m, PEM-MH) får plats enligt beräkningarna. PEM-cellen anses vara den enda realistiska bränslecellen att använda i en AUV-applikation då AFC är mycket dyr och ställer stora renhetskrav på bränslet. PAFC, MCFC och SOFC är också mycket dyra bränsleceller som passar bäst för stationär kraftgenerering vid högre effekter (>100 kW). Överlag måste det nämnas att alla prisuppgifter skall behandlas med försiktighet då de är preliminära siffror för komponenter som fortfarande är under utveckling.
PEM-k, PEM-bränslecell med komprimerad bränsleförvaringPEM-bränslecellerna har en bra verkningsgrad, är tysta och är lätta att anpassa i önskad effekt. Tre olika lagringstyper för vätgasen studerades och man skulle kunna sammanfatta det som att vill man ha ett tekniskt enklare men dessvärre också skrymmande system så är PEM-k-alternativet där bränslet och oxidatorn medförs i komprimerad form i standardgastuber att föredra. Detta alternativ har också en viss utvecklingspotential då gaslagringen skulle kunna ske i kompositbehållare vid ett högre tryck. Detta ställer dock genast större krav på bunkringsutrustning och dylikt vilket ger ökade kostnader. Kryogenisk förvaring av bränslet och oxidatorn bedöms bli för stort och tekniskt komplicerat för att löna sig för den studerade farkosten. Har man ett större energibehov kan det dock vara aktuellt.
PEM-m, PEM-bränslecell med metanolreformerVill man öka energitätheten kan man installera en metanolreformer. Då medbringas metanol som primärbränsle istället för komprimerad vätgas. Denna konfiguration har dubbelt så hög energitäthet jämfört med första alternativet där vätgasen medbringades i komprimerad form.Väljer man en metanolreformer måste man dock vara säker på dess funktionalitet så att den verkligen producerar ren vätgas. Skulle orenheter följa med vätgasen till bränslecellen kanden ta skada. Detta system blir energitätare men samtidigt mer tekniskt komplicerat och dyrare.
PEM-MH, PEM-bränslecell med väte lagrat i metallhydridI det tredje alternativet studerades metallhydridlagring av väte. Energitätheten blir likvärdig jämfört med metanollagringsfallet vad gäller den volymbaserade energitätheten men har sämre massbaserad energitäthet. Bunkringen av detta system är mycket mer komplicerad
70
jämfört med de två andra fallen och metallhydriden är väldigt känslig för föroreningar. De flesta metallhydrider har också gemensamt att de är mycket dyra beroende på att de är tillverkade av exklusiva material. Av ovan nämnda skäl kan därför metallhydrider knappast rekommenderas i en AUV-applikation. Man skall dock vara uppmärksam på att lagringstypen har en bra utvecklingspotential. Idag kan metallhydriderna endast lagra ca 2 massprocent väte cykliskt men i framtiden kan denna siffra mycket väl öka till 5 - 10 % vilket kommer att göra lagringstypen intressant.
7 KONKLUSIONER OCH REKOMMENDATIONERDet är svårt att entydigt peka ut en kandidat bland de studerade energisystemen. Av de system som bedöms vara realistiska för en cyklisk drift i AUV:n kan man sammanfatta det med att av batterisystemen är Ni/MH och Li-batteriet de mest intressanta batterialternativen. Ni/MH har en hygglig energitäthet och ett modest pris. Har man en farkost med begränsat utrymme och är beredd att ta en större kostnad kan man rekommendera litiumbatteriet. Förhoppningsvis sjunker också kostnaden för denna batterityp framöver.
För bränslecellerna kan man nämna att om utrymmet finns till förfogande så kan PEM-bränslecellen med komprimerad gasförvaring vara ett bra system. Denna lagringstyp kräver dock att bränslet lagras vid ett högt tryck för att man ska nå en godtagbar energitäthet. Vill man satsa på ett energitätare men ett mer tekniskt avancerat system till en högre kostnad kan man utnyttja en metanolreformer eller metallhydridtekniken. Detta är dock en chansning idagsläget då systemens tekniska mognad inte är fullständig ännu.
Att göra ett komplett generalarrangemang med alla farkostens komponenters vikt och volym hade varit intressant. En noggrannare energiåtgångssimulering hade då kunnat genomföras och farkosten skulle kunna optimeras i ett iterativt arbete. Samtidigt hade det varit givande att verifiera strömningsmotståndsberäkningarna med en CFD-analys. Det hade även varit intressant att utreda komprimerad bränsle- och syrgaslagring vid ett högre tryck i tryckkärl av kompositmaterial. Detta ligger dock utanför ramen för detta examensarbete men ovan nämnda områden hade varit intressanta att utreda i framtida studier.

71
8 REFERENSER
1. Autonomous underwater vehicle - Hugin 3000 AUV,http://www.km.kongsberg.com (2005-05-10)
2. Clifford Funnell, Janes Underwater Technology 2005-2006, Janes Information Group Limited.
3. www.whoi.edu/science/AOPE/dept/OSL/remus.html (2005-05-10)4. www.whoi.edu/science/AOPE/dept/OSL/remus-navystory.html (2005-05-10)5. www.whoi.edu/science/AOPE/dept/OSL/remus.html (2005-05-10)6. http://www.mes.co.jp/english/business/ship/ship-08.html (2005-07-05)7. http://www.milnet.com/pentagon/navy/Manta-at-launch.gif (2005-10-04)8. Saab Bofors Underwater Systems (2005-05-10)9. http://www.ausi.org/events/LakeGeorgeTest.htm (2005-05-03)10. Personlig kontakt, Anders Eriksson, Kockums AB (2005-06-06)11. F. M. White (2003), Fluid Mechanics, 5th Edition, McGraw-Hill, Fig 7.16 sid 482.12. E. Eugene Allmendinger (1990), Submersible Vehicle Systems Design, The Society of
Naval Architects and Marine Engineers.13. Sighard F. Hoerner (1958), Fluid-Dynamic Drag, Publicerad av S. F. Hoerner.14. Statens Skeppsprovningsanstalt (1966-08-15), Rapport 1387-3, Kungliga
Marinförvaltningen Vapenavdelningen Stockholm.15. Edward V. Lewis (1989), Principles of Naval Architecture Vol III, 2nd Edition,
Roderdiagram sid 298, fig 132.16. Personlig kontakt, Johan Jensen, Kockums AB (2005-05-25)17. Personlig kontakt, Per-Ola Hedin, Kockums AB (2005-05-25)18. J. Brix (1993), Manoevring Technical Manual, Seehafen Verlag.19. K. J. Rawson – E. C. Tupper (1984), Basic Ship Theory Vol II, 3rd Edition, Longman
Scientific and Technical.20. J. Brix (1993), Manoevring Technical Manual, Seehafen Verlag. Fig 1.2.5 sid 7721. http://www.schilling.com/interim/products/rse.php (2005-05-02)22. Personlig kontakt, Robert Edlund, Kockums AB (2005-05-12)23. Personlig kontakt, Gunnar Andersson, Kockums AB (2005-06-08)24. Tryckkärlskommissionen (1987), Tryckkärlsnormer, 5:e utgåvan.25. www.isk.kth.se (2005-06-14)26. http://www.abatel.com (2005-06-14)27. www.batteriforeningen.se (2005-06-14)28. www.abatel.com (2005-06-14)29. Personlig kontakt, Paul Nilsson, Kockums AB (2005-06-16)30. http://celltech.webbplats.se/produkter/upload-pdf/LEADER//CT200-12-HR.pdf
(2005-06-16)31. http://www.saftbatteries.com/000-corporate/include-content/index-gb.html (2005-06-
23)32. www.betard.co.uk (2005-06-28)33. http://www.rolls-royce.com/marine/product/propulsion/submarine/zebra.jsp (2005-06-
28)34. http://www.futurepundit.com/archives/000835.html (2005-06-28)35. Bo Andersson – Arne Johansson (2000), Elbilsbatterier,
Kommunikationsforskningsberedningen Rapport 2000-17.

72
36. www.abatel.com/fakta/liion_fakt_s.html (2005-06-29)37. http://www.abatel.com/frame_s.html (2005-06-30)38. http://www.cobasys.com/pdf/transportation/Series9500/Series_9500_Brochure.html
(2005-07-01)39. http://www.bstsys.com/AgZn%20Cells.htm (2005-07-01)40. Richard Blidberg – Mikhail D. Ageev – James C. Jalbert (1997),
Design Considerations for a Solar Powered AUV, Autonomous Undersea Systems Institute.
41. SMHI, http://www.smhi.se/foretag/m/ml_solstralning.htm (2005-07-07)42. Personlig kontakt, Azra Selimovic, LTH (2005-06-07)43. International Energy Agency IEA, Annual Report 200344. www.dodfuelcell.cecer.army.mil/paper2.html (2005-07-08)45. www.utcfuelcells.com/fuelcells/fc_types.shtm (2005-07-08)46. www.h2fc.com/technologu.html (2005-07-08)47. http://gcep.stanford.edu/pdfs/hydrogen_workshop/Wu.pdf (2005-09-29)48. Personlig kontakt, Laurent Allidieres, AirLiquide, Sassenage Frankrike (2005-07-19)49. Personlig kontakt, Jerome M. Perrin, AirLiquide, Sassenage Frankrike (2005-07-19)50. Personlig kontakt, Leif Sandqvist, AGA (2005-07-19)51. Hans Larsen – Robert Feidenhans’l – Leif Sönderberg Petersen (2004),
Hydrogen and its competitors, Risö Energy Report 3, Risö National Laboratory.52. A Metal Hydride Thermal Sorption Hydrogen Compressor,
http://h2seminar2004.ife.no/program/2_2_Hydrogen_systems_End_use/Maehlen_2004_MH_Hydrogen_Compressor.pdf (2005-07-12)
53. http://www.physics.wustl.edu/~kfk/Hydrogen.html (2005-07-18)54. http://www.kfb.se/pdfer/R-00-43.pdf (2005-07-12)55. http://hydpark.ca.sandia.gov (2005-07-12)56. http://www.eere.energy.gov/RE/hydrogen_transport.html (2005-07-12)57. www.eere.energy.gov/hydrogenandfuelcells/pdfs/adv_h2_storage.pdf (2005-07-15)58. Sten-Erik Mörtstedt – Gunnar Hellsten (1994), Data och diagram, Liber Utbildning.59. Henrik Alvarez (1990), Energiteknik del II, Studentlitteratur.60. www.aga.se (2005-07-15)61. www.hydrogen.org/index-e.html (2005-07-15)62. Personlig kontakt, Anders Ocklind, Cellkraft AB (2005-07-27)63. http://www.cellkraft.se/produkt/S-serien.pdf (2005-07-27)64. http://www.idatech.com/solutions/multi_fuel_solutions/methanol.html (2005-07-29)65. www.engin.umich.edu/dept/che/research/thomson (2005-07-29)66. K. C. Hoffman – J. J. Reilly, Metal Hydride Storage for Mobile and Stationary
Applications, Brookhaven National Laboratory, Upton N.Y.67. http://www.fuelcellstore.com/cgi-bin/fuelweb/view=Item/cat=/product=869
(2005-09-28)68. www.thordohlssonskemiska.se/metanol.pdf (2005-07-28)69. www.uereca.de (2005-07-20)70. www.tetech.com (2005-07-20)71. http://www.rti.org/page.cfm?objectid=D3154009-28BE-4DBF-B8EC541532F03B4B
(2005-09-28)72. http://www.hi-z.com/websit04.htm (2005-07-20)73. www.globalte.com (2005-07-20)

73
74. www.bellona.no (2005-07-29)75. Personlig kontakt, Ola Ivarsson, Kockums AB- Stirling (2005-09-07)76. Attilio Brighenti – Cantore Guiseppe – Paolo Osti (1991), The Cryo-thermal Closed
Cycle Diesel Engine, Defence Oceanology International 91, Brighton.77. A. J. Donaldsson, Air-Independent Propulsion Systems, Rolls-Royce78. Personlig kontakt, A. J. Donaldsson, Rolls-Royce (2002-10-14)79. http://www.subnetitalia.it/articoloaip2.htm (2005-07-19)80. MDDO Contract B362 (1990), Air Independent Propulsion, System Study, Report no.
3, Ottawa.81. H. I. H. Saravanamuttoo (1999), Gas Turbine Theory, 4th Edition, Pearson Education
Limited.
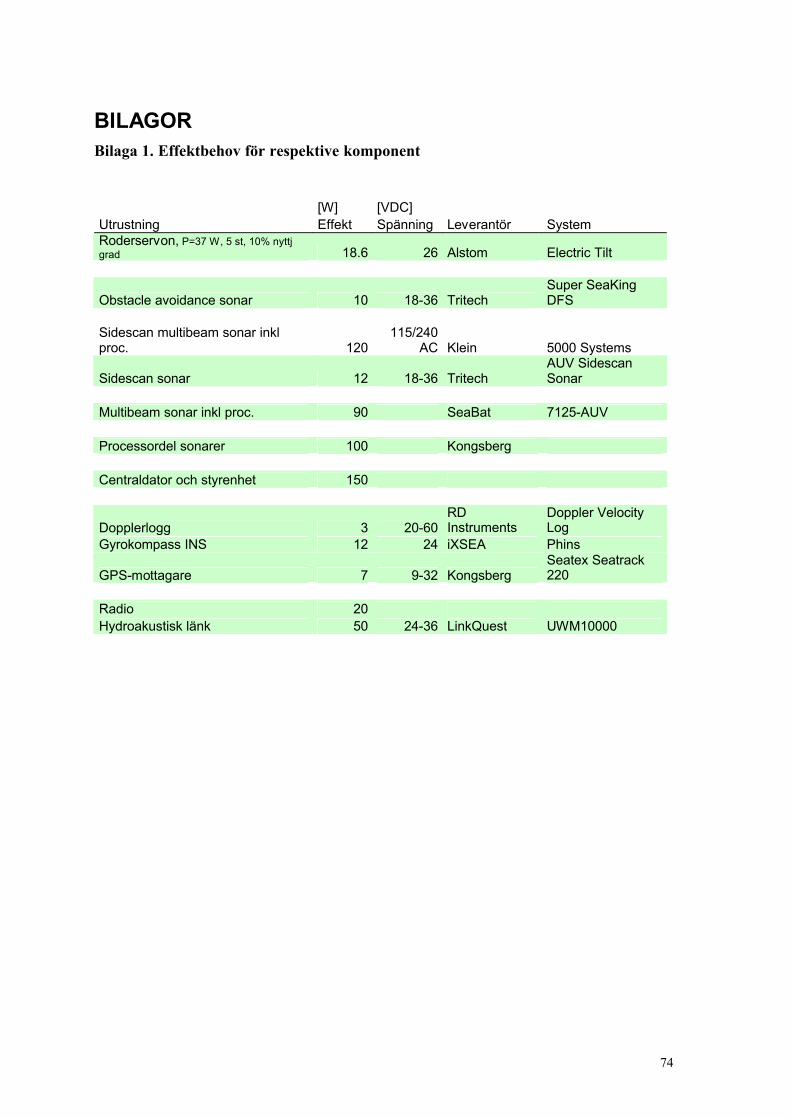
74
BILAGORBilaga 1. Effektbehov för respektive komponent
[W] [VDC]Utrustning Effekt Spänning Leverantör SystemRoderservon, P=37 W, 5 st, 10% nyttj grad 18.6 26 Alstom Electric Tilt
Obstacle avoidance sonar 10 18-36 TritechSuper SeaKing DFS
Sidescan multibeam sonar inkl proc. 120
115/240 AC Klein 5000 Systems
Sidescan sonar 12 18-36 TritechAUV Sidescan Sonar
Multibeam sonar inkl proc. 90 SeaBat 7125-AUV
Processordel sonarer 100 Kongsberg
Centraldator och styrenhet 150
Dopplerlogg 3 20-60RD Instruments
Doppler Velocity Log
Gyrokompass INS 12 24 iXSEA Phins
GPS-mottagare 7 9-32 KongsbergSeatex Seatrack 220
Radio 20Hydroakustisk länk 50 24-36 LinkQuest UWM10000
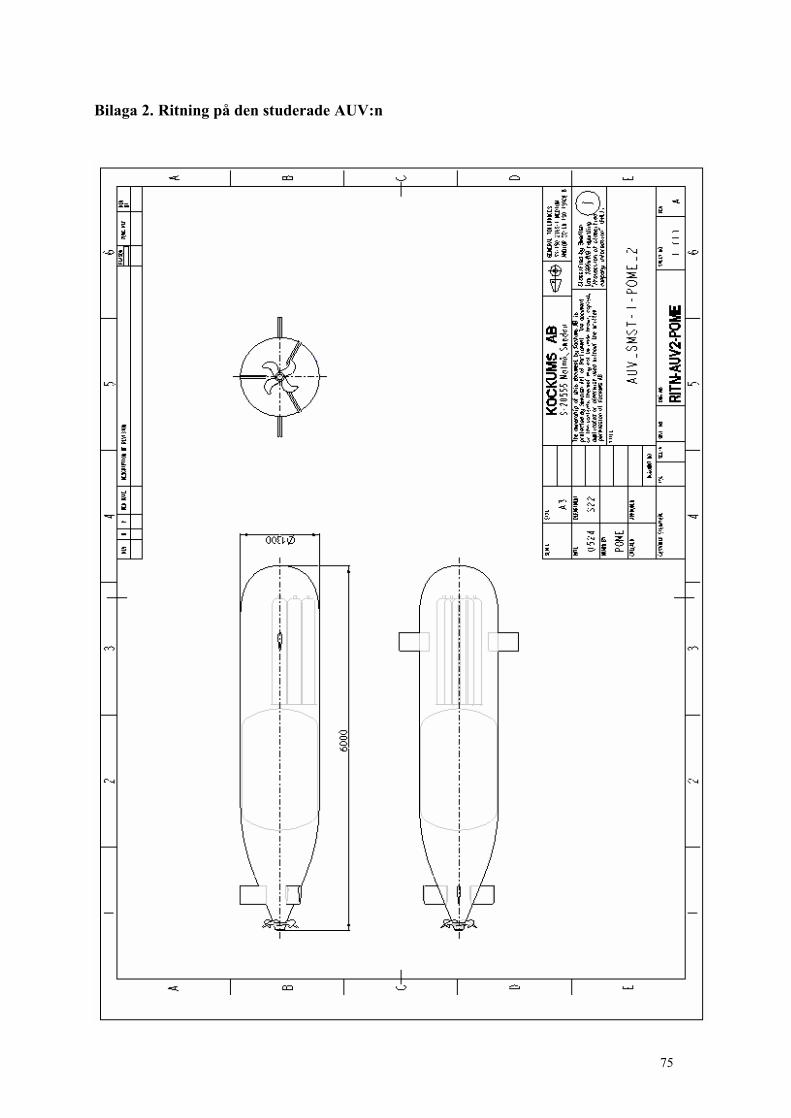
75
Bilaga 2. Ritning på den studerade AUV:n
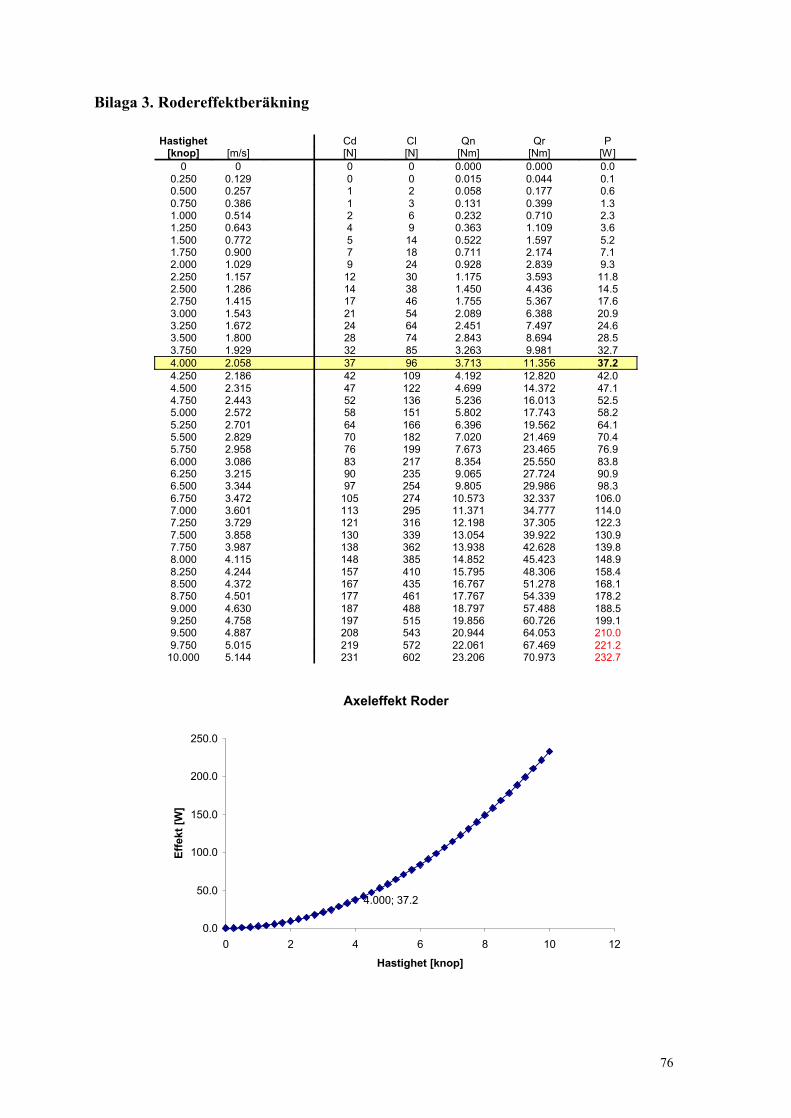
76
Bilaga 3. Rodereffektberäkning
Hastighet Cd Cl Qn Qr P[knop] [m/s] [N] [N] [Nm] [Nm] [W]
0 0 0 0 0.000 0.000 0.00.250 0.129 0 0 0.015 0.044 0.10.500 0.257 1 2 0.058 0.177 0.60.750 0.386 1 3 0.131 0.399 1.31.000 0.514 2 6 0.232 0.710 2.31.250 0.643 4 9 0.363 1.109 3.61.500 0.772 5 14 0.522 1.597 5.21.750 0.900 7 18 0.711 2.174 7.12.000 1.029 9 24 0.928 2.839 9.32.250 1.157 12 30 1.175 3.593 11.82.500 1.286 14 38 1.450 4.436 14.52.750 1.415 17 46 1.755 5.367 17.63.000 1.543 21 54 2.089 6.388 20.93.250 1.672 24 64 2.451 7.497 24.63.500 1.800 28 74 2.843 8.694 28.53.750 1.929 32 85 3.263 9.981 32.74.000 2.058 37 96 3.713 11.356 37.24.250 2.186 42 109 4.192 12.820 42.04.500 2.315 47 122 4.699 14.372 47.14.750 2.443 52 136 5.236 16.013 52.55.000 2.572 58 151 5.802 17.743 58.25.250 2.701 64 166 6.396 19.562 64.15.500 2.829 70 182 7.020 21.469 70.45.750 2.958 76 199 7.673 23.465 76.96.000 3.086 83 217 8.354 25.550 83.86.250 3.215 90 235 9.065 27.724 90.96.500 3.344 97 254 9.805 29.986 98.36.750 3.472 105 274 10.573 32.337 106.07.000 3.601 113 295 11.371 34.777 114.07.250 3.729 121 316 12.198 37.305 122.37.500 3.858 130 339 13.054 39.922 130.97.750 3.987 138 362 13.938 42.628 139.88.000 4.115 148 385 14.852 45.423 148.98.250 4.244 157 410 15.795 48.306 158.48.500 4.372 167 435 16.767 51.278 168.18.750 4.501 177 461 17.767 54.339 178.29.000 4.630 187 488 18.797 57.488 188.59.250 4.758 197 515 19.856 60.726 199.19.500 4.887 208 543 20.944 64.053 210.09.750 5.015 219 572 22.061 67.469 221.2
10.000 5.144 231 602 23.206 70.973 232.7
Axeleffekt Roder
4.000; 37.2
0.0
50.0
100.0
150.0
200.0
250.0
0 2 4 6 8 10 12
Hastighet [knop]
Effe
kt [W
]
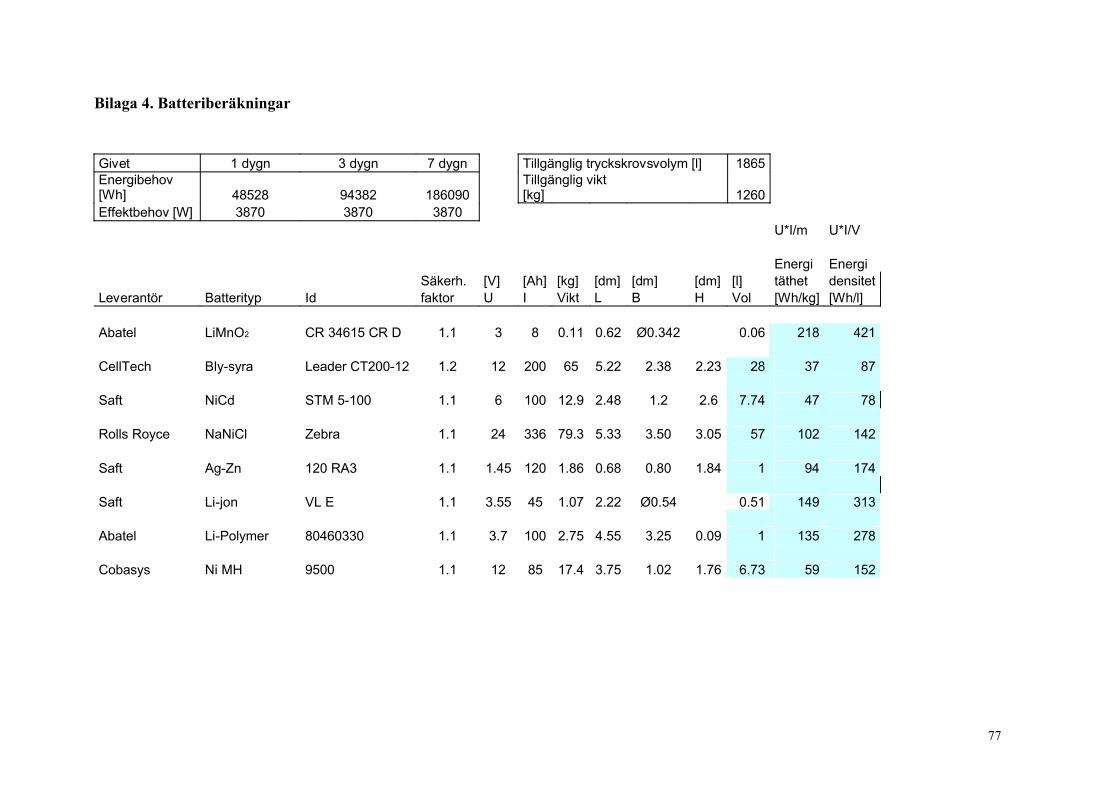
77
Bilaga 4. Batteriberäkningar
Givet 1 dygn 3 dygn 7 dygn Tillgänglig tryckskrovsvolym [l] 1865Energibehov [Wh] 48528 94382 186090
Tillgänglig vikt [kg] 1260
Effektbehov [W] 3870 3870 3870U*I/m U*I/V
Energi Energi Säkerh. [V] [Ah] [kg] [dm] [dm] [dm] [l] täthet densitet
Leverantör Batterityp Id faktor U I Vikt L B H Vol [Wh/kg] [Wh/l]
Abatel LiMnO2 CR 34615 CR D 1.1 3 8 0.11 0.62 Ø0.342 0.06 218 421
CellTech Bly-syra Leader CT200-12 1.2 12 200 65 5.22 2.38 2.23 28 37 87
Saft NiCd STM 5-100 1.1 6 100 12.9 2.48 1.2 2.6 7.74 47 78
Rolls Royce NaNiCl Zebra 1.1 24 336 79.3 5.33 3.50 3.05 57 102 142
Saft Ag-Zn 120 RA3 1.1 1.45 120 1.86 0.68 0.80 1.84 1 94 174
Saft Li-jon VL E 1.1 3.55 45 1.07 2.22 Ø0.54 0.51 149 313
Abatel Li-Polymer 80460330 1.1 3.7 100 2.75 4.55 3.25 0.09 1 135 278
Cobasys Ni MH 9500 1.1 12 85 17.4 3.75 1.02 1.76 6.73 59 152
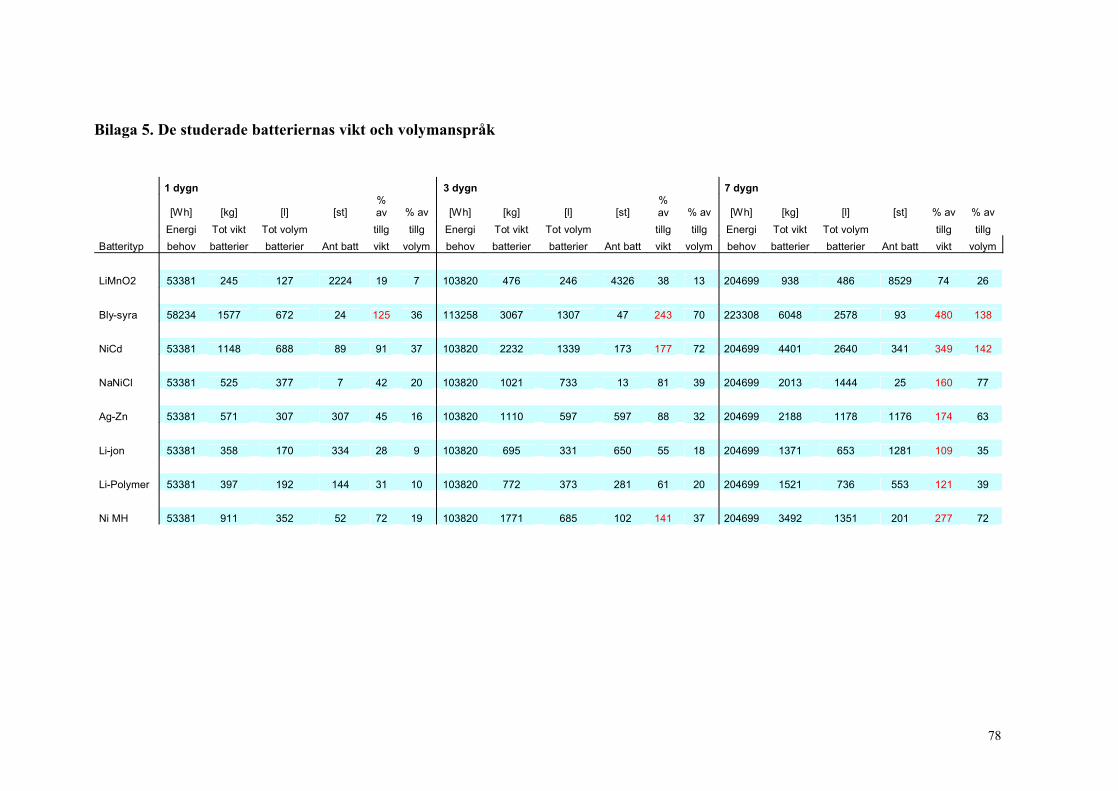
78
Bilaga 5. De studerade batteriernas vikt och volymanspråk
1 dygn 3 dygn 7 dygn
[Wh] [kg] [l] [st]% av % av [Wh] [kg] [l] [st]
% av % av [Wh] [kg] [l] [st] % av % av
Energi Tot vikt Tot volym tillg tillg Energi Tot vikt Tot volym tillg tillg Energi Tot vikt Tot volym tillg tillgBatterityp behov batterier batterier Ant batt vikt volym behov batterier batterier Ant batt vikt volym behov batterier batterier Ant batt vikt volym
LiMnO2 53381 245 127 2224 19 7 103820 476 246 4326 38 13 204699 938 486 8529 74 26
Bly-syra 58234 1577 672 24 125 36 113258 3067 1307 47 243 70 223308 6048 2578 93 480 138
NiCd 53381 1148 688 89 91 37 103820 2232 1339 173 177 72 204699 4401 2640 341 349 142
NaNiCl 53381 525 377 7 42 20 103820 1021 733 13 81 39 204699 2013 1444 25 160 77
Ag-Zn 53381 571 307 307 45 16 103820 1110 597 597 88 32 204699 2188 1178 1176 174 63
Li-jon 53381 358 170 334 28 9 103820 695 331 650 55 18 204699 1371 653 1281 109 35
Li-Polymer 53381 397 192 144 31 10 103820 772 373 281 61 20 204699 1521 736 553 121 39
Ni MH 53381 911 352 52 72 19 103820 1771 685 102 141 37 204699 3492 1351 201 277 72
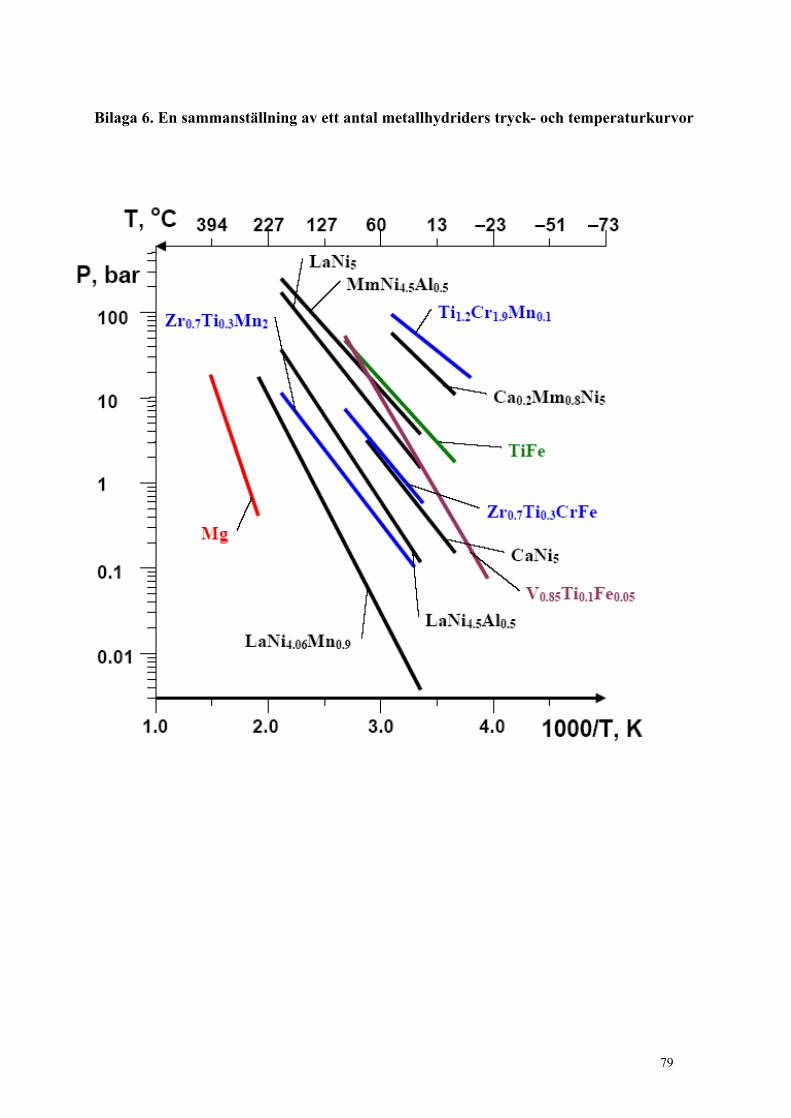
79
Bilaga 6. En sammanställning av ett antal metallhydriders tryck- och temperaturkurvor
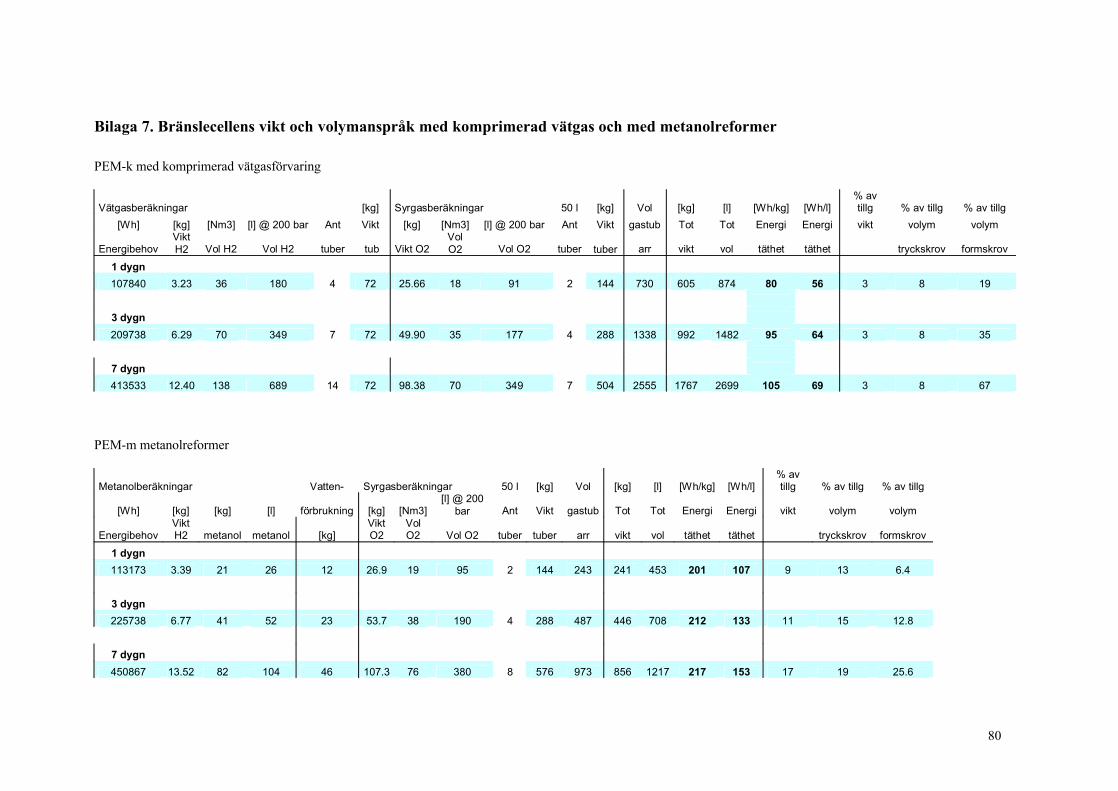
80
Bilaga 7. Bränslecellens vikt och volymanspråk med komprimerad vätgas och med metanolreformer
PEM-k med komprimerad vätgasförvaring
Vätgasberäkningar [kg] Syrgasberäkningar 50 l [kg] Vol [kg] [l] [Wh/kg] [Wh/l]% av tillg % av tillg % av tillg
[Wh] [kg] [Nm3] [l] @ 200 bar Ant Vikt [kg] [Nm3] [l] @ 200 bar Ant Vikt gastub Tot Tot Energi Energi vikt volym volym
EnergibehovVikt H2 Vol H2 Vol H2 tuber tub Vikt O2
Vol O2 Vol O2 tuber tuber arr vikt vol täthet täthet tryckskrov formskrov
1 dygn107840 3.23 36 180 4 72 25.66 18 91 2 144 730 605 874 80 56 3 8 19
3 dygn209738 6.29 70 349 7 72 49.90 35 177 4 288 1338 992 1482 95 64 3 8 35
7 dygn413533 12.40 138 689 14 72 98.38 70 349 7 504 2555 1767 2699 105 69 3 8 67
PEM-m metanolreformer
Metanolberäkningar Vatten- Syrgasberäkningar 50 l [kg] Vol [kg] [l] [Wh/kg] [Wh/l]% av tillg % av tillg % av tillg
[Wh] [kg] [kg] [l] förbrukning [kg] [Nm3][l] @ 200
bar Ant Vikt gastub Tot Tot Energi Energi vikt volym volym
EnergibehovVikt H2 metanol metanol [kg]
Vikt O2
Vol O2 Vol O2 tuber tuber arr vikt vol täthet täthet tryckskrov formskrov
1 dygn113173 3.39 21 26 12 26.9 19 95 2 144 243 241 453 201 107 9 13 6.4
3 dygn225738 6.77 41 52 23 53.7 38 190 4 288 487 446 708 212 133 11 15 12.8
7 dygn450867 13.52 82 104 46 107.3 76 380 8 576 973 856 1217 217 153 17 19 25.6
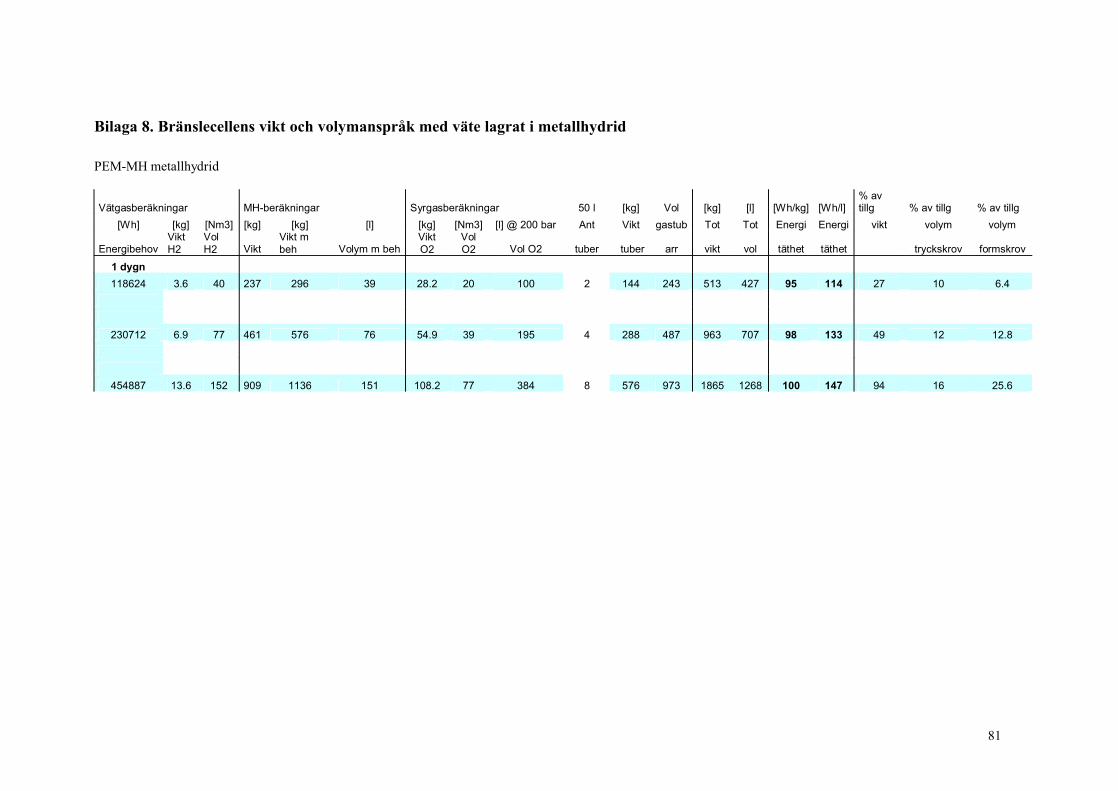
81
Bilaga 8. Bränslecellens vikt och volymanspråk med väte lagrat i metallhydrid
PEM-MH metallhydrid
Vätgasberäkningar MH-beräkningar Syrgasberäkningar 50 l [kg] Vol [kg] [l] [Wh/kg] [Wh/l]% av tillg % av tillg % av tillg
[Wh] [kg] [Nm3] [kg] [kg] [l] [kg] [Nm3] [l] @ 200 bar Ant Vikt gastub Tot Tot Energi Energi vikt volym volym
EnergibehovVikt H2
Vol H2 Vikt
Vikt m beh Volym m beh
Vikt O2
Vol O2 Vol O2 tuber tuber arr vikt vol täthet täthet tryckskrov formskrov
1 dygn118624 3.6 40 237 296 39 28.2 20 100 2 144 243 513 427 95 114 27 10 6.4
230712 6.9 77 461 576 76 54.9 39 195 4 288 487 963 707 98 133 49 12 12.8
454887 13.6 152 909 1136 151 108.2 77 384 8 576 973 1865 1268 100 147 94 16 25.6