Embed Size (px)
DESCRIPTION
Cursuri pentru BSA
Citation preview
Radu ȚÂRULESCU
BAZELE SISTEMELOR AUTOMATE
1
2
EVOLUȚIA SISTEMELOR AUTOMATE

Elementele de bază în dezvoltarea omenirii
• Preocupările grecilor, egiptenilor și arabilor în urmărirea timpului;
• Revoluția industrială din Europa (secolul al XVIII –lea);
• Războaiele mondiale 1914 – 1918 și 1939 – 1945;
• Apariția computerului (1936);
• Debutul cursei spațiale (1957);
3
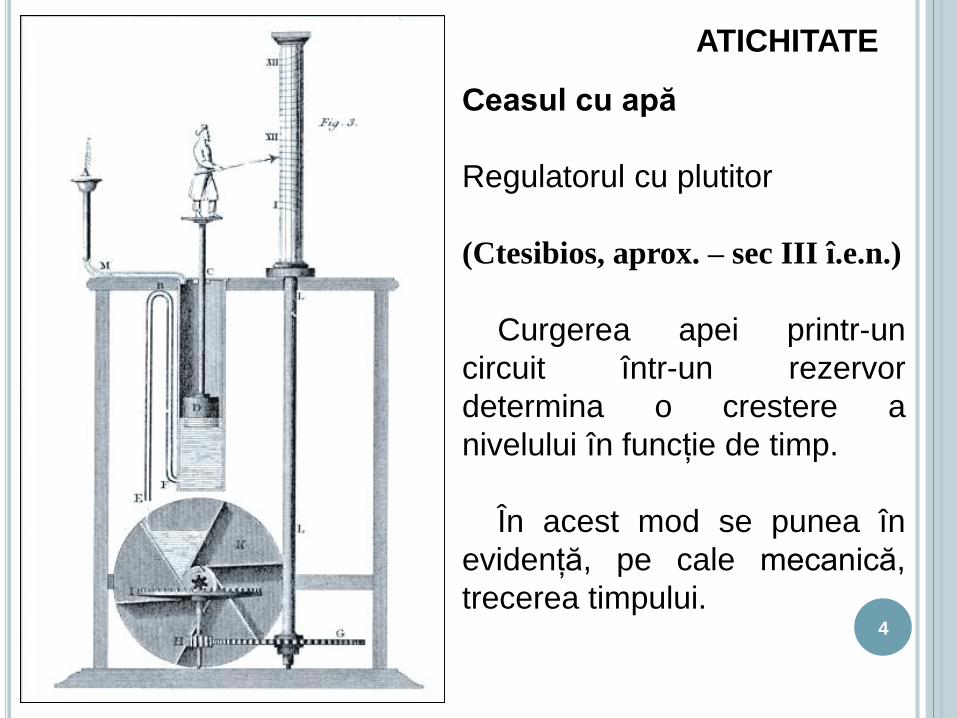
ATICHITATE
Ceasul cu apă
Regulatorul cu plutitor
(Ctesibios, aprox. – sec III î.e.n.)
Curgerea apei printr-un
circuit într-un rezervor
determina o crestere a
nivelului în funcție de timp.
În acest mod se punea în
evidență, pe cale mecanică,
trecerea timpului.4
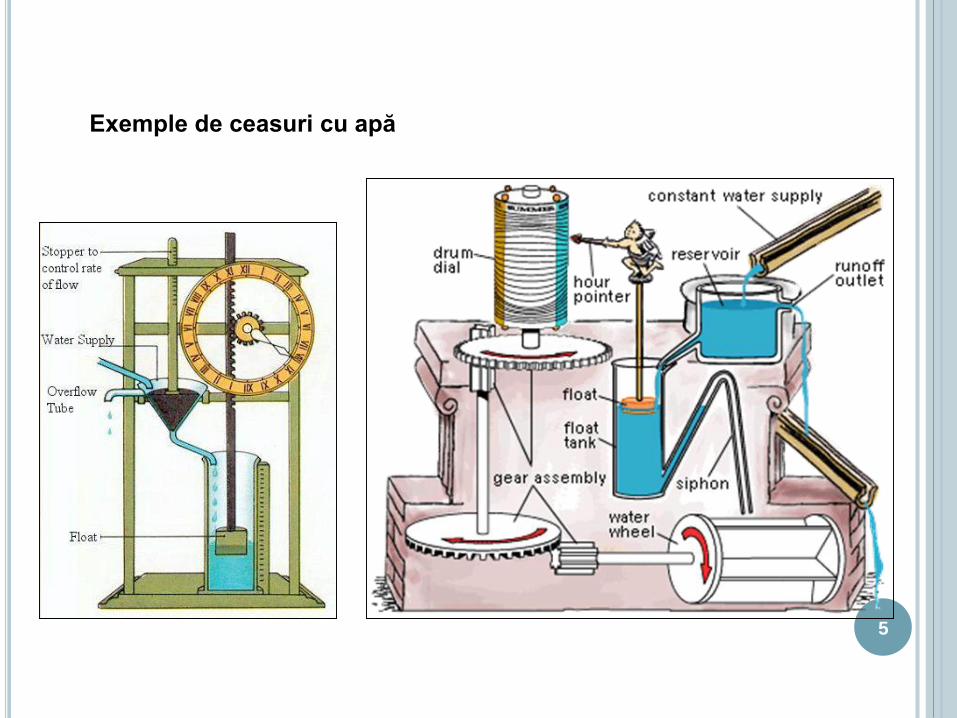
Exemple de ceasuri cu apă
5
ATICHITATE
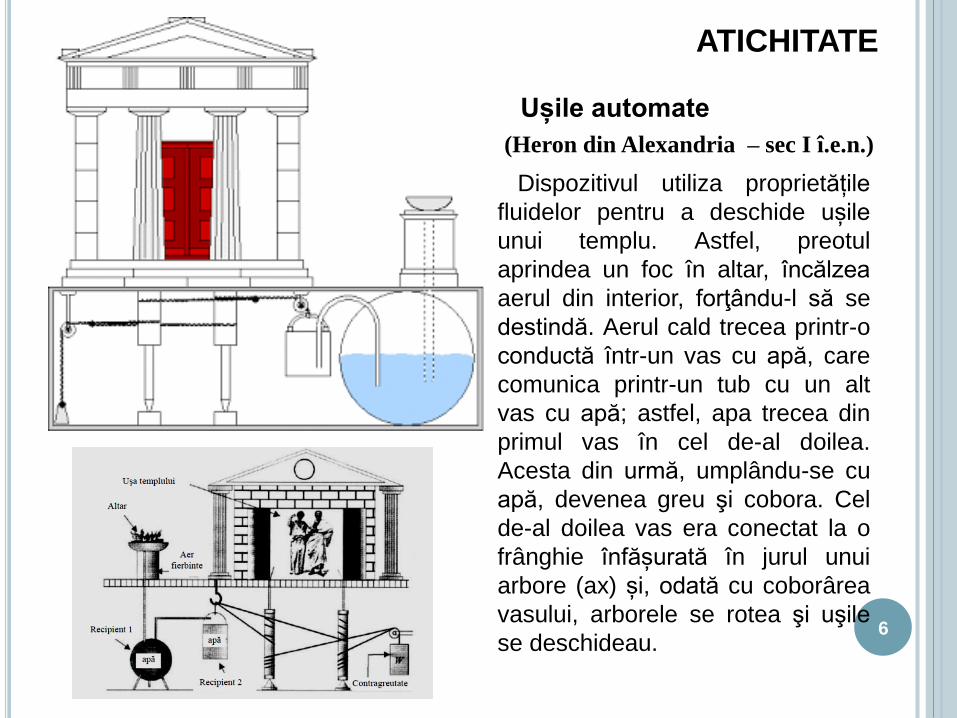
(Heron din Alexandria – sec I î.e.n.)
Ușile automate
Dispozitivul utiliza proprietățile
fluidelor pentru a deschide ușile
unui templu. Astfel, preotul
aprindea un foc în altar, încălzea
aerul din interior, forţându-l să se
destindă. Aerul cald trecea printr-o
conductă într-un vas cu apă, care
comunica printr-un tub cu un alt
vas cu apă; astfel, apa trecea din
primul vas în cel de-al doilea.
Acesta din urmă, umplându-se cu
apă, devenea greu şi cobora. Cel
de-al doilea vas era conectat la o
frânghie înfășurată în jurul unui
arbore (ax) și, odată cu coborârea
vasului, arborele se rotea şi uşile
se deschideau.6
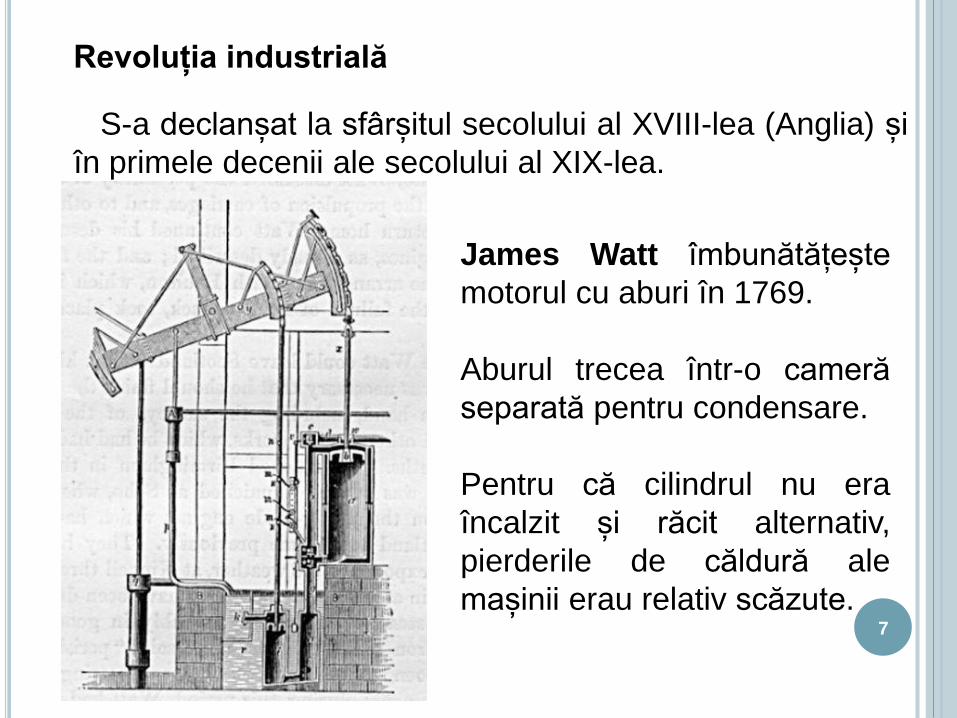
Revoluția industrială
S-a declanșat la sfârșitul secolului al XVIII-lea (Anglia) și
în primele decenii ale secolului al XIX-lea.
James Watt îmbunătățește
motorul cu aburi în 1769.
Aburul trecea într-o cameră
separată pentru condensare.
Pentru că cilindrul nu era
încalzit și răcit alternativ,
pierderile de căldură ale
mașinii erau relativ scăzute.7
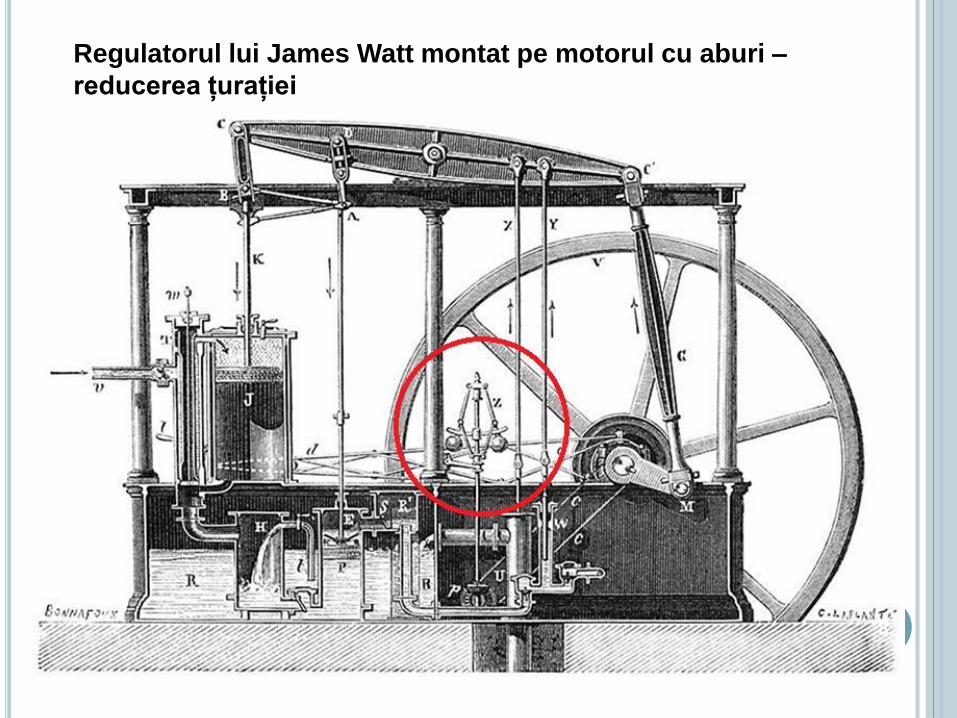
Regulatorul lui James Watt montat pe motorul cu aburi –
reducerea țurației
8
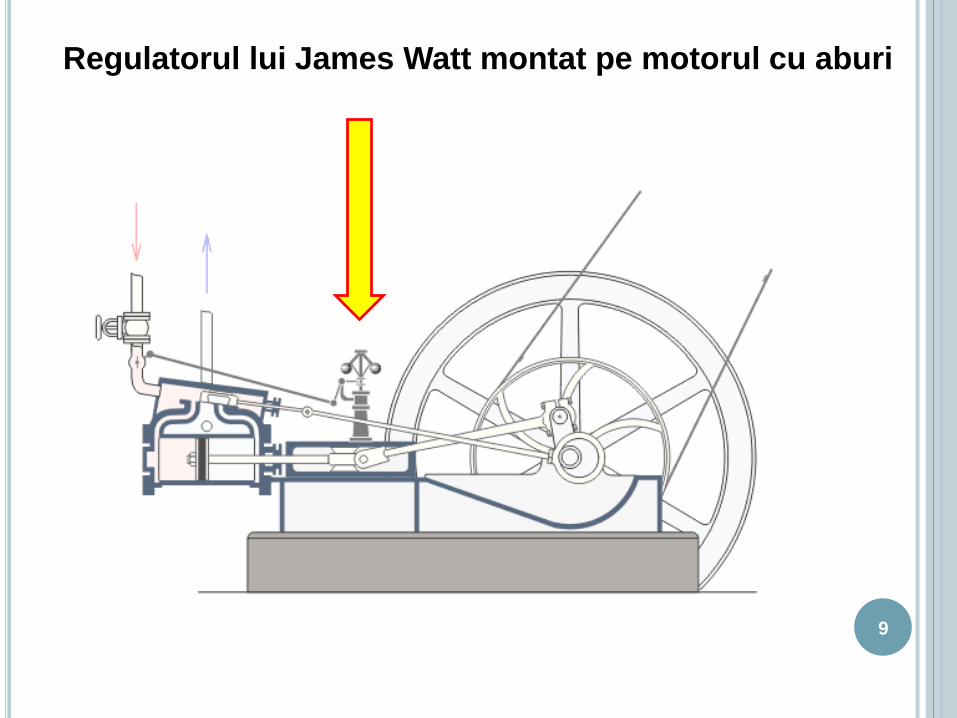
Regulatorul lui James Watt montat pe motorul cu aburi
9
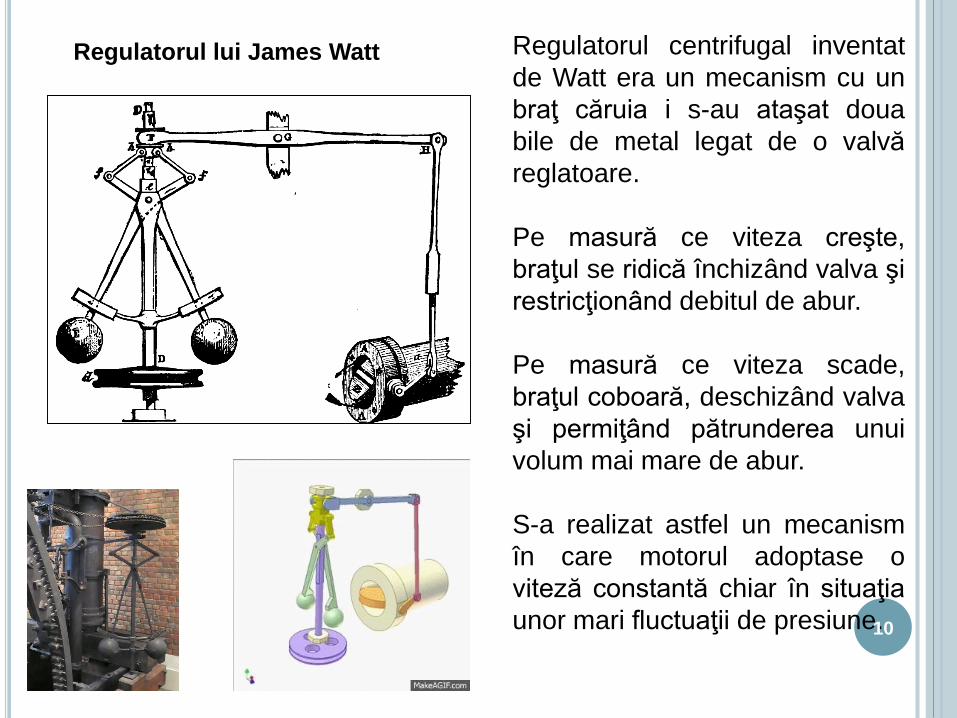
Regulatorul centrifugal inventat
de Watt era un mecanism cu un
braţ căruia i s-au ataşat doua
bile de metal legat de o valvă
reglatoare.
Pe masură ce viteza creşte,
braţul se ridică închizând valva şi
restricţionând debitul de abur.
Pe masură ce viteza scade,
braţul coboară, deschizând valva
şi permiţând pătrunderea unui
volum mai mare de abur.
S-a realizat astfel un mecanism
în care motorul adoptase o
viteză constantă chiar în situaţia
unor mari fluctuaţii de presiune.
Regulatorul lui James Watt
10
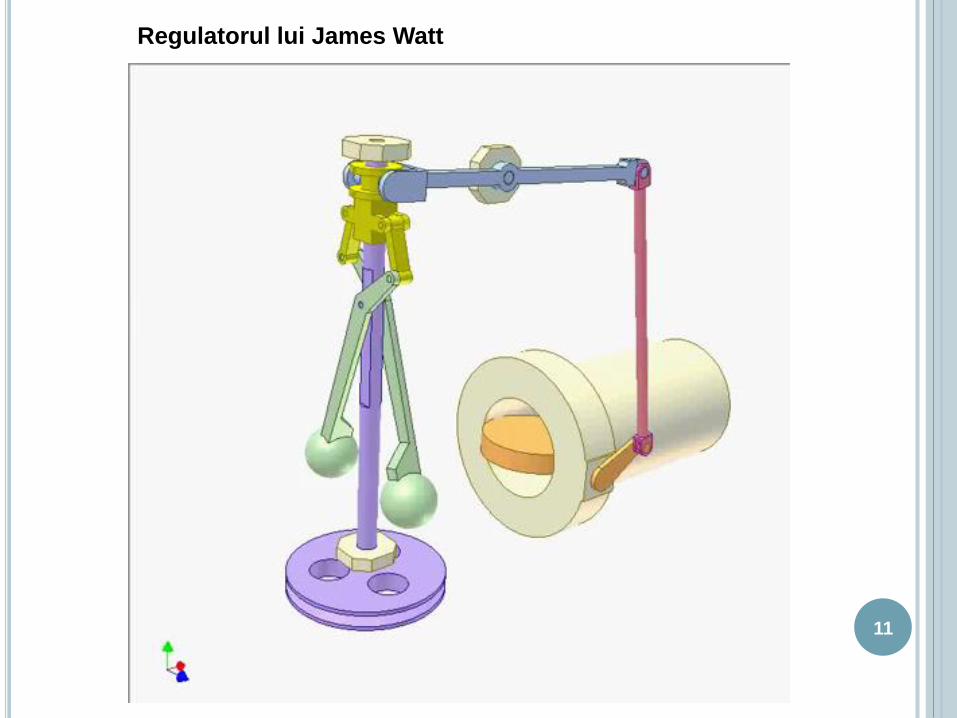
Regulatorul lui James Watt
11
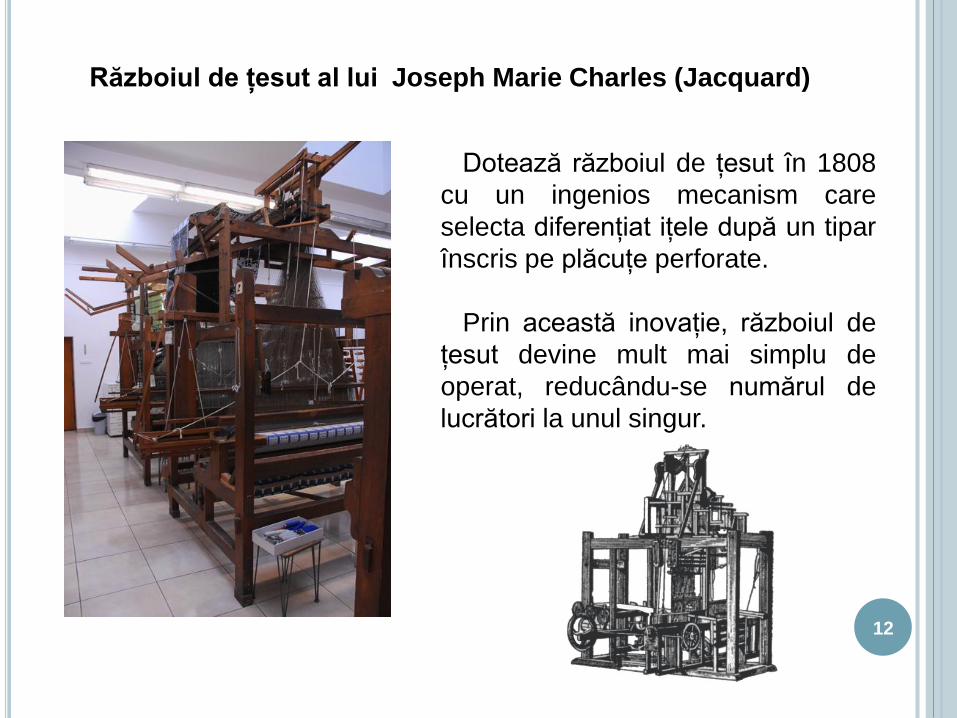
Războiul de țesut al lui Joseph Marie Charles (Jacquard)
Dotează războiul de țesut în 1808
cu un ingenios mecanism care
selecta diferențiat ițele după un tipar
înscris pe plăcuțe perforate.
Prin această inovație, războiul de
țesut devine mult mai simplu de
operat, reducându-se numărul de
lucrători la unul singur.
12
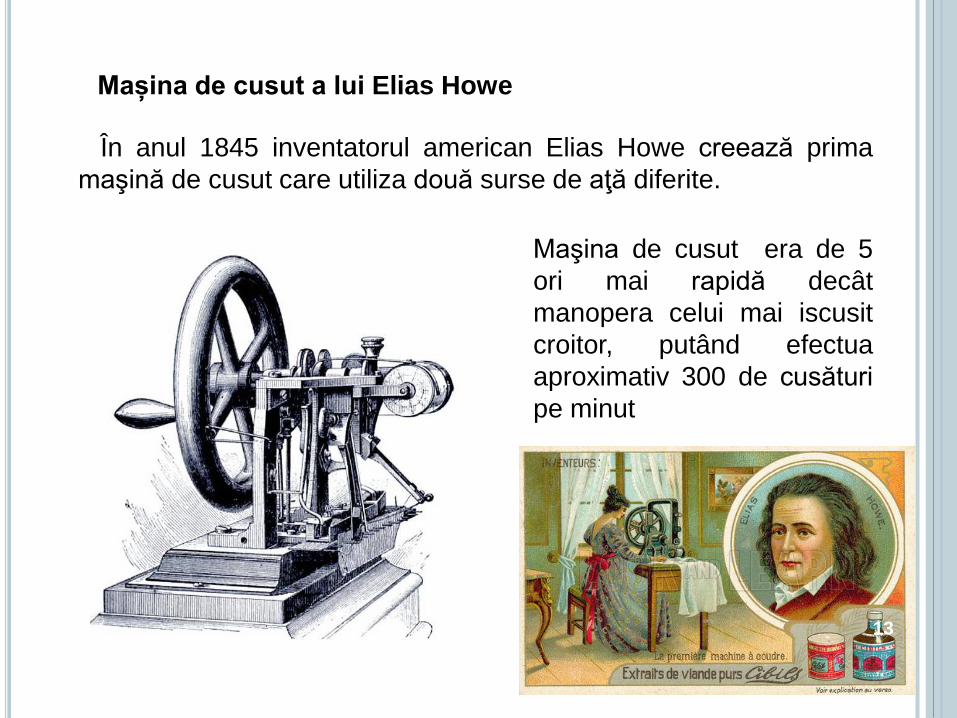
În anul 1845 inventatorul american Elias Howe creează prima
maşină de cusut care utiliza două surse de aţă diferite.
Mașina de cusut a lui Elias Howe
Maşina de cusut era de 5
ori mai rapidă decât
manopera celui mai iscusit
croitor, putând efectua
aproximativ 300 de cusături
pe minut
13
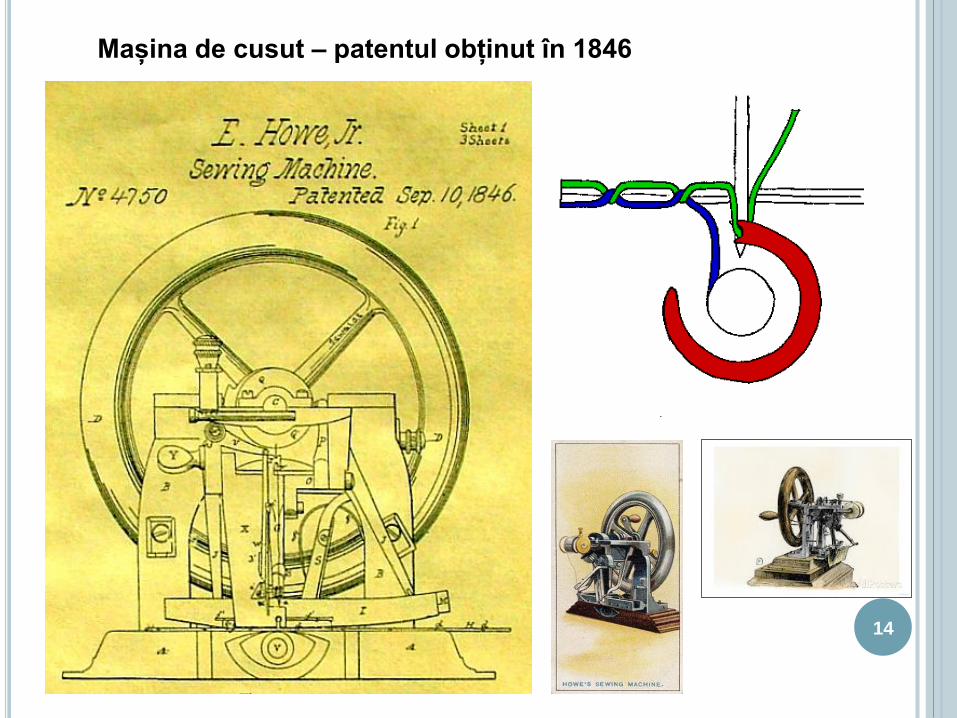
Mașina de cusut – patentul obținut în 1846
14

Mașina de scris
Prima mașină de scris funcțională a fost inventată de către Pellegrino
Turri, în 1808, pentru a veni în ajutorul persoanelor oarbe.
Rasmus Malling Hansen în 1870 a realizat "globul de scris„.
15
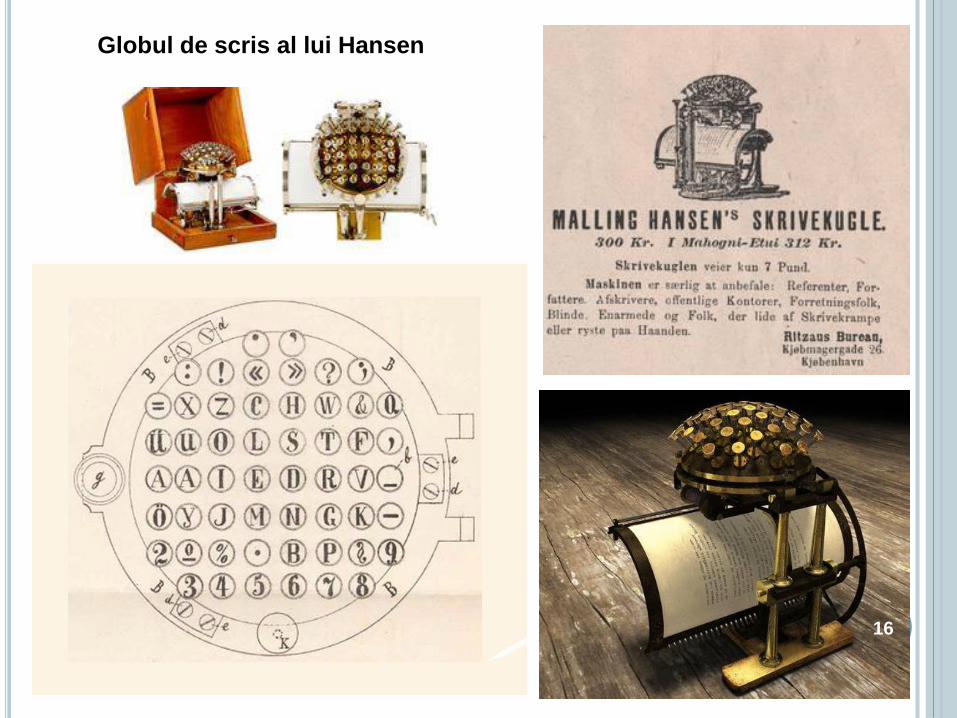
Globul de scris al lui Hansen
16
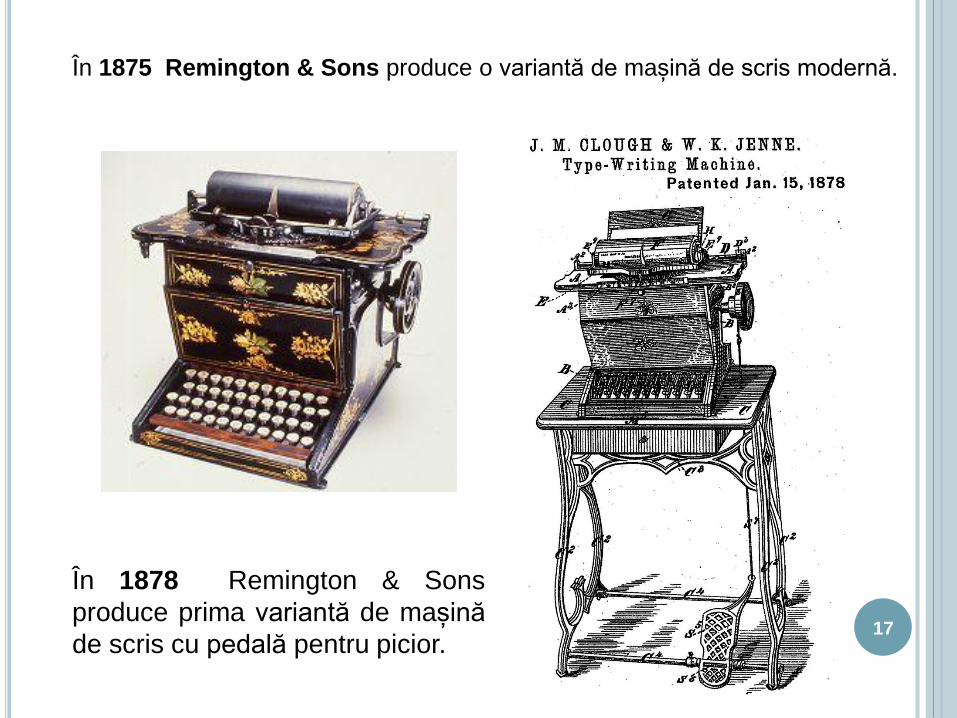
În 1875 Remington & Sons produce o variantă de mașină de scris modernă.
În 1878 Remington & Sons
produce prima variantă de mașină
de scris cu pedală pentru picior.17
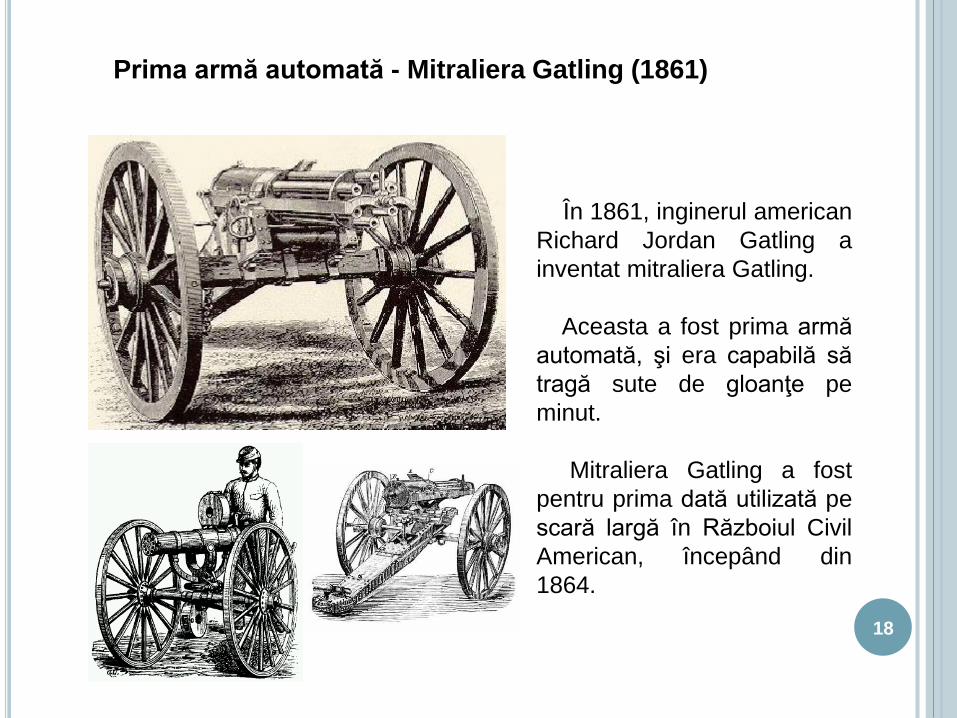
Prima armă automată - Mitraliera Gatling (1861)
În 1861, inginerul american
Richard Jordan Gatling a
inventat mitraliera Gatling.
Aceasta a fost prima armă
automată, şi era capabilă să
tragă sute de gloanţe pe
minut.
Mitraliera Gatling a fost
pentru prima dată utilizată pe
scară largă în Războiul Civil
American, începând din
1864.
18
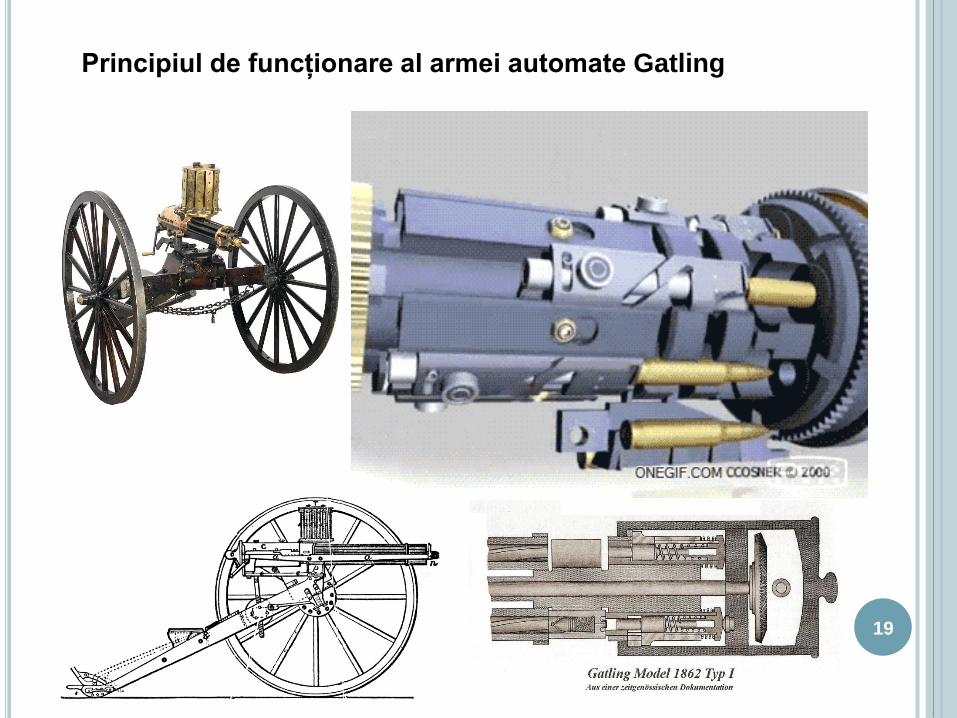
Principiul de funcționare al armei automate Gatling
19
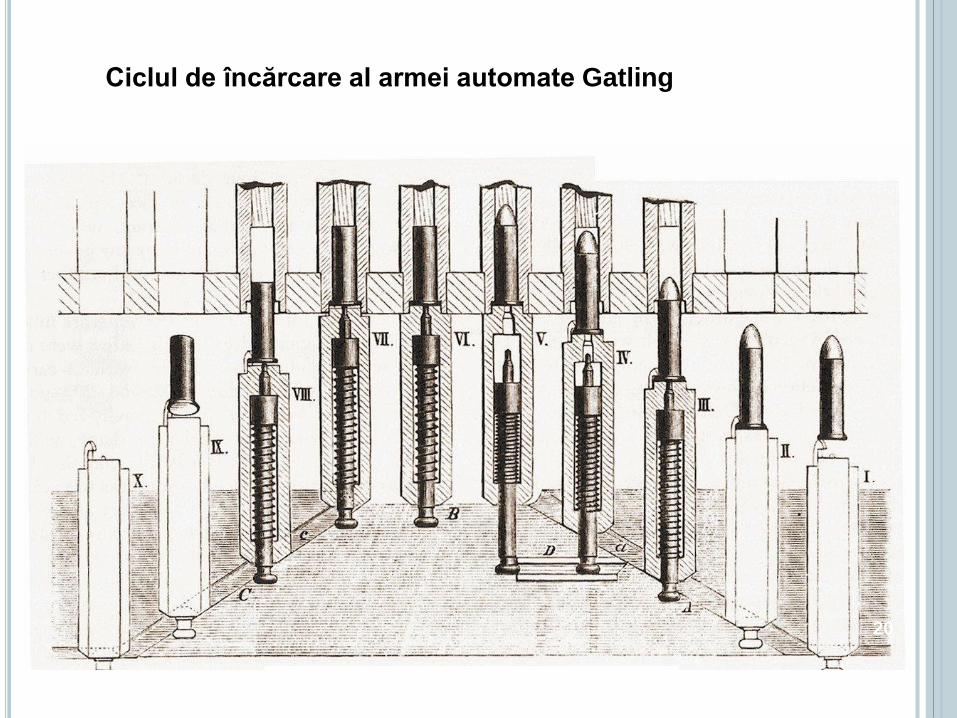
Ciclul de încărcare al armei automate Gatling
20
Primul Război Mondial (1914 – 1918)
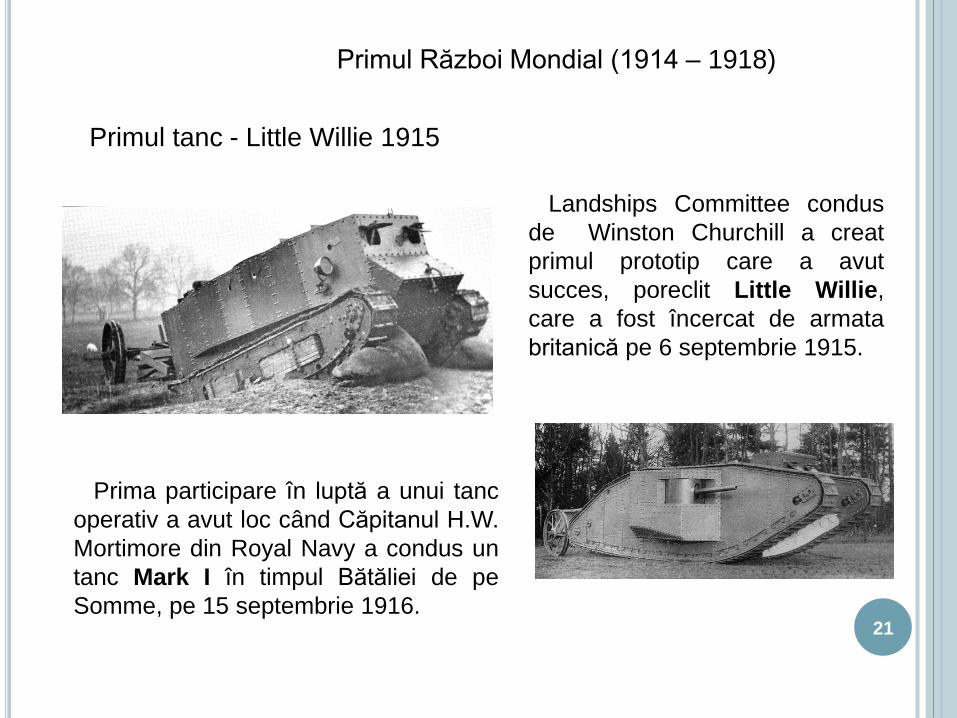
Primul tanc - Little Willie 1915
Landships Committee condus
de Winston Churchill a creat
primul prototip care a avut
succes, poreclit Little Willie,
care a fost încercat de armata
britanică pe 6 septembrie 1915.
Prima participare în luptă a unui tanc
operativ a avut loc când Căpitanul H.W.
Mortimore din Royal Navy a condus un
tanc Mark I în timpul Bătăliei de pe
Somme, pe 15 septembrie 1916.21
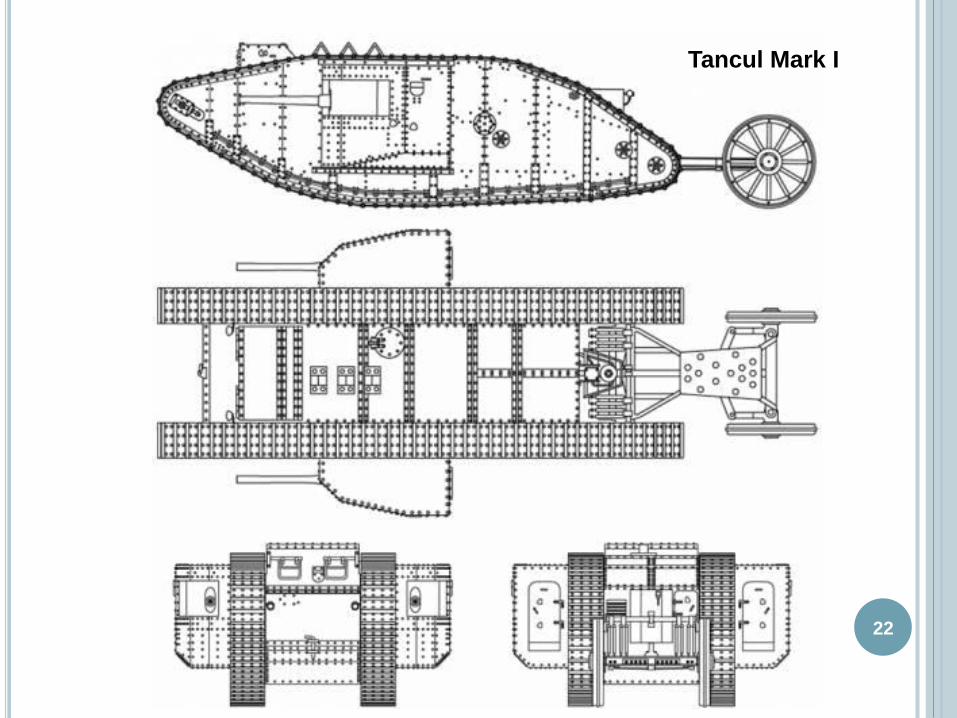
Tancul Mark I
22
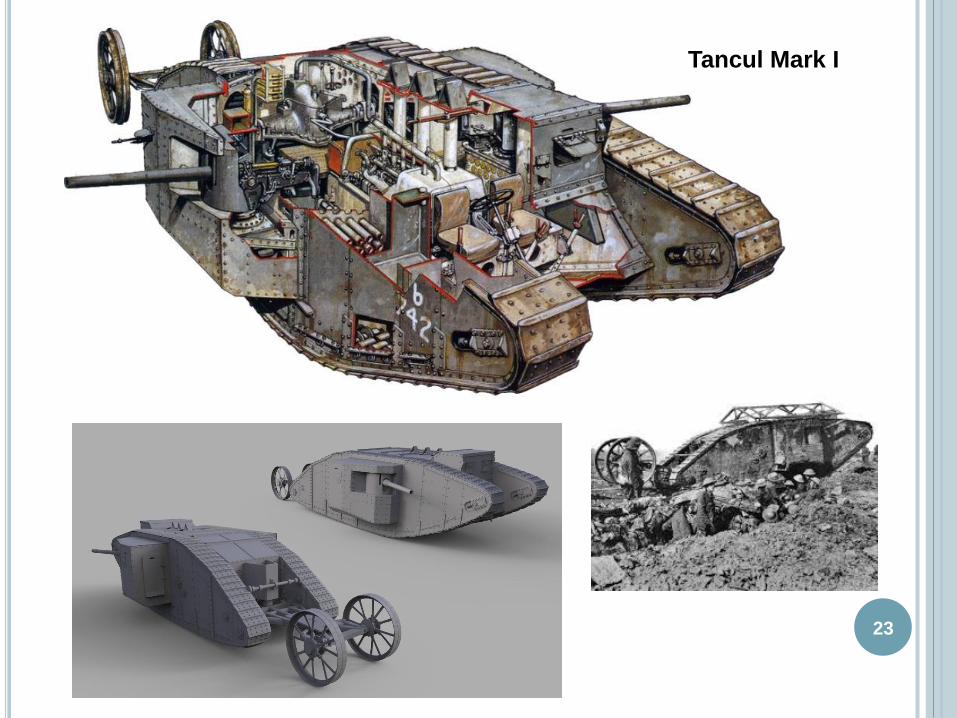
Tancul Mark I
23
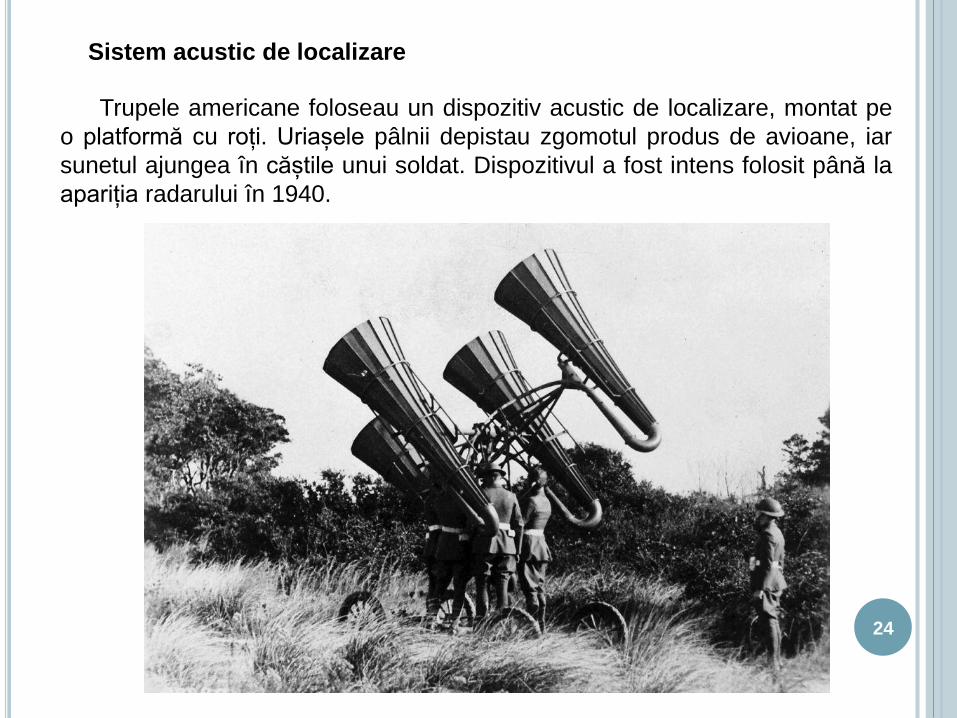
Trupele americane foloseau un dispozitiv acustic de localizare, montat pe
o platformă cu roți. Uriașele pâlnii depistau zgomotul produs de avioane, iar
sunetul ajungea în căștile unui soldat. Dispozitivul a fost intens folosit până la
apariția radarului în 1940.
Sistem acustic de localizare
24
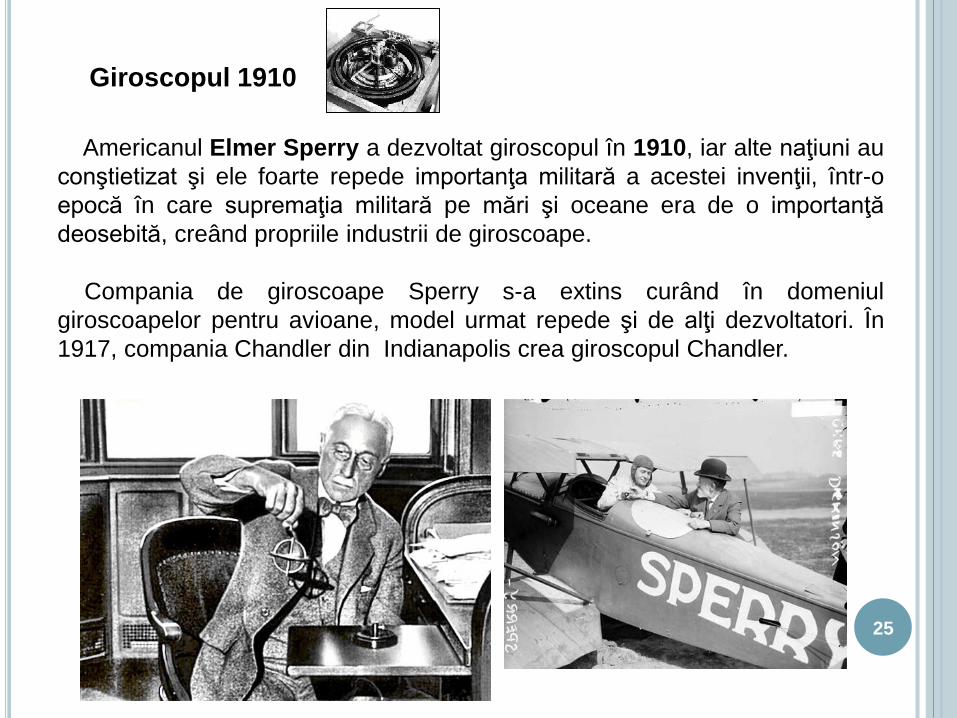
Americanul Elmer Sperry a dezvoltat giroscopul în 1910, iar alte naţiuni au
conştietizat şi ele foarte repede importanţa militară a acestei invenţii, într-o
epocă în care supremaţia militară pe mări şi oceane era de o importanţă
deosebită, creând propriile industrii de giroscoape.
Compania de giroscoape Sperry s-a extins curând în domeniul
giroscoapelor pentru avioane, model urmat repede şi de alţi dezvoltatori. În
1917, compania Chandler din Indianapolis crea giroscopul Chandler.
Giroscopul 1910
25
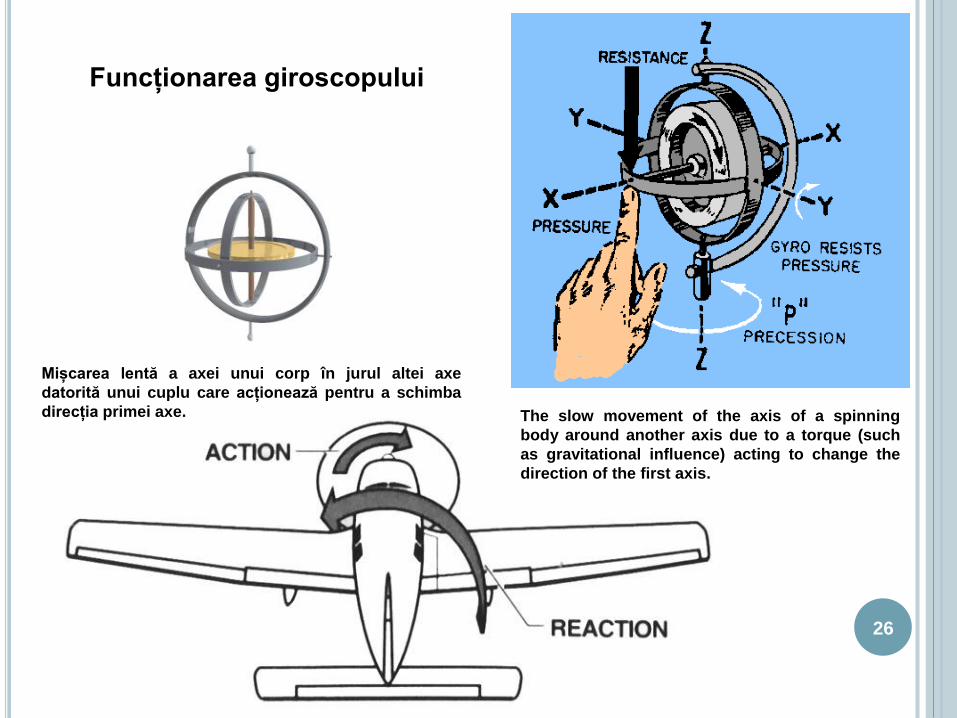
Funcționarea giroscopului
The slow movement of the axis of a spinning
body around another axis due to a torque (such
as gravitational influence) acting to change the
direction of the first axis.
Mișcarea lentă a axei unui corp în jurul altei axe
datorită unui cuplu care acționează pentru a schimba
direcția primei axe.
26
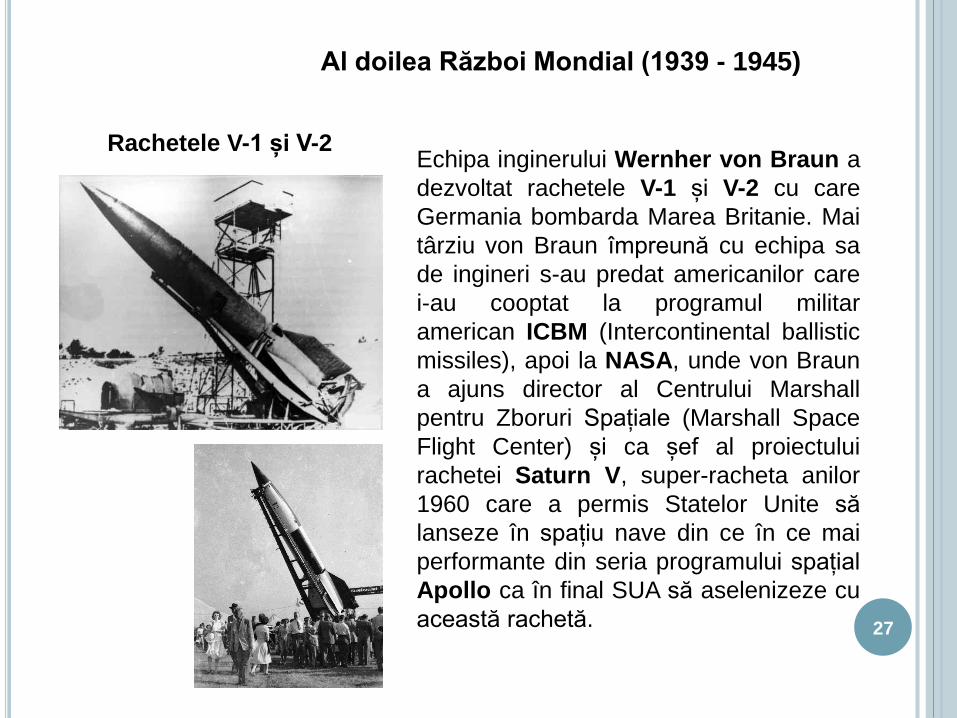
Al doilea Război Mondial (1939 - 1945)
Echipa inginerului Wernher von Braun a
dezvoltat rachetele V-1 și V-2 cu care
Germania bombarda Marea Britanie. Mai
târziu von Braun împreună cu echipa sa
de ingineri s-au predat americanilor care
i-au cooptat la programul militar
american ICBM (Intercontinental ballistic
missiles), apoi la NASA, unde von Braun
a ajuns director al Centrului Marshall
pentru Zboruri Spațiale (Marshall Space
Flight Center) și ca șef al proiectului
rachetei Saturn V, super-racheta anilor
1960 care a permis Statelor Unite să
lanseze în spațiu nave din ce în ce mai
performante din seria programului spațial
Apollo ca în final SUA să aselenizeze cu
această rachetă.
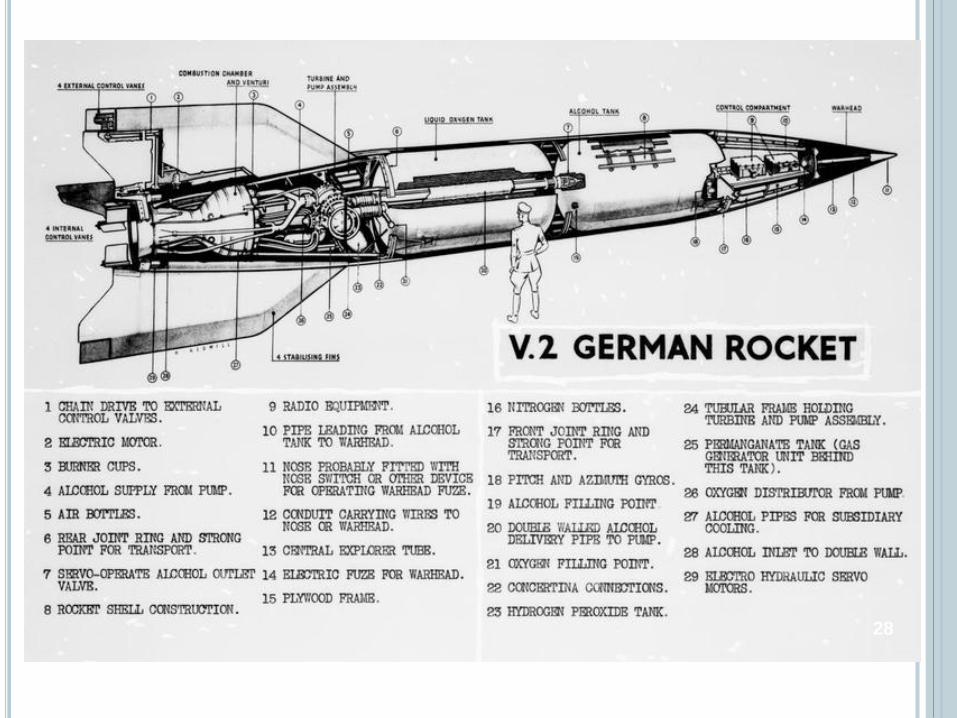
Rachetele V-1 și V-2
27
28
Wernher von Braun
29

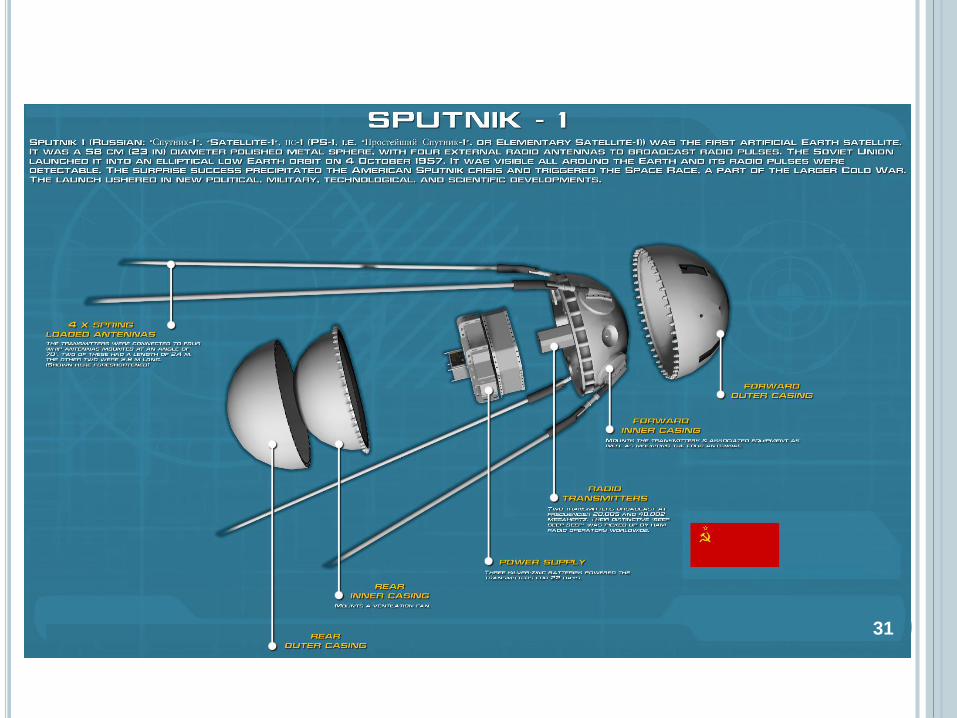
Primul zbor pe o orbită spațială (cosmică) terestră a fost realizat prin
satelitul sovietic Sputnik la 14.10.1957
30
31
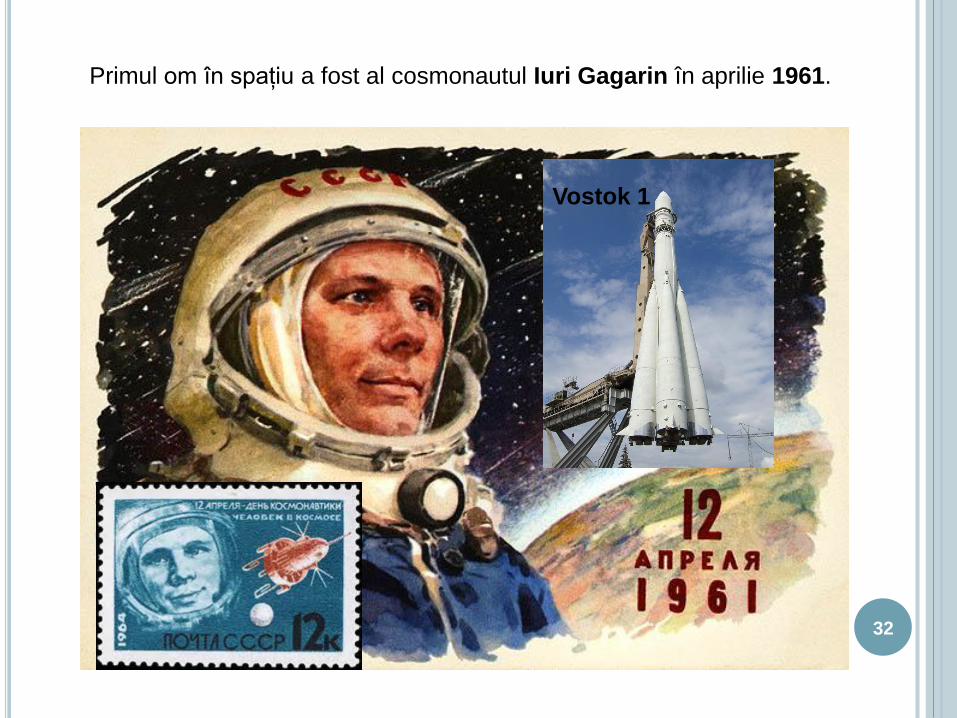
Primul om în spațiu a fost al cosmonautul Iuri Gagarin în aprilie 1961.
Vostok 1
32

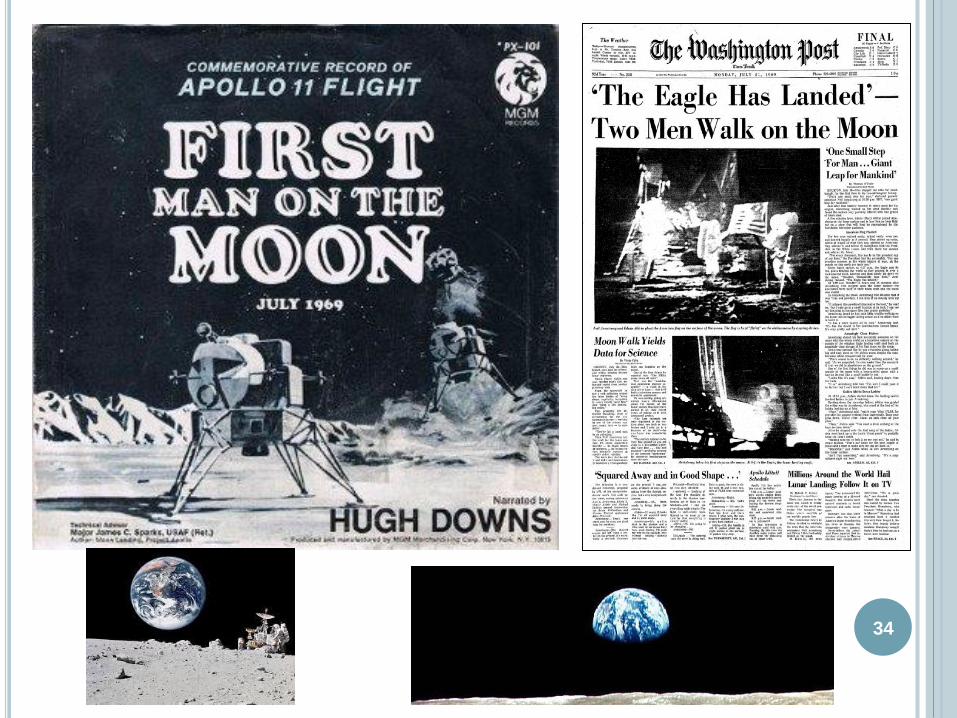
Primul zbor spre Lună al unui echipaj uman, a
fost al americanilor astronauți Amstrong, Collins
și Aldrin cu vehiculul spațial Eagle la 20.07.1969.
Apollo 11
33
34
Calculatorul
În 1837 Charles Babbage este primul om care proiectează o mașină de
calcul complet programabilă.
Babbage a început să-și proiecteze „Mașina analitică” în 1837, dar nu a
reușit să o construiască până la moartea sa, din cauza limitărilor
tehnologice ale vremii. Cu toate acestea, o mașină construită în 1991 după
schițele sale s-a dovedit a funcționa perfect.
35
Calculatorul lui Babbage
36
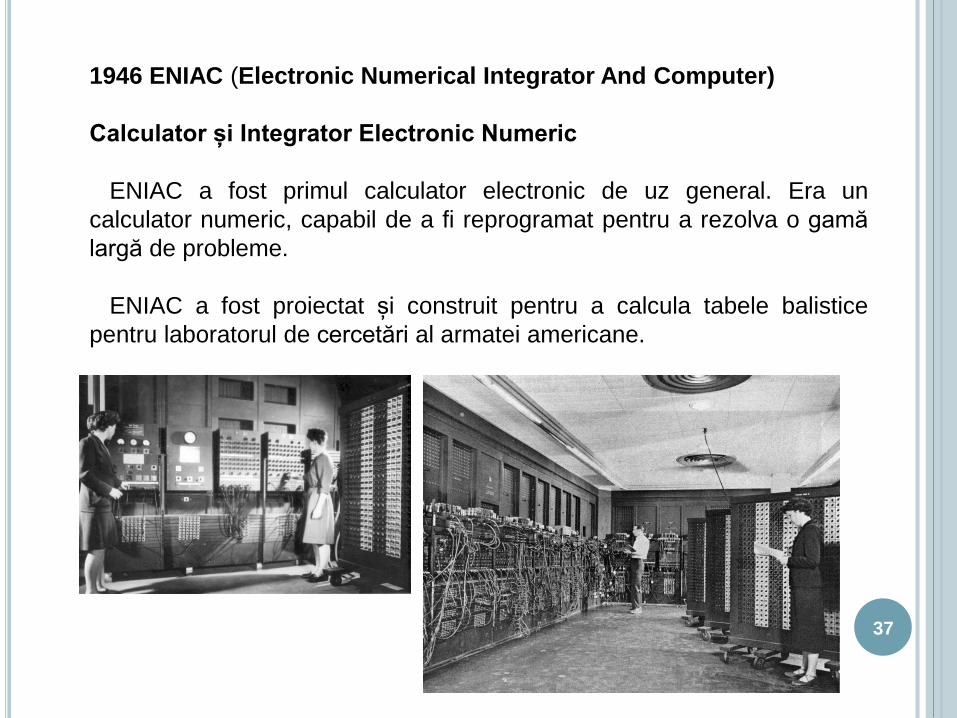
1946 ENIAC (Electronic Numerical Integrator And Computer)
Calculator și Integrator Electronic Numeric
ENIAC a fost primul calculator electronic de uz general. Era un
calculator numeric, capabil de a fi reprogramat pentru a rezolva o gamă
largă de probleme.
ENIAC a fost proiectat și construit pentru a calcula tabele balistice
pentru laboratorul de cercetări al armatei americane.
37
ENIAC (Electronic Numerical Integrator And Computer)
38
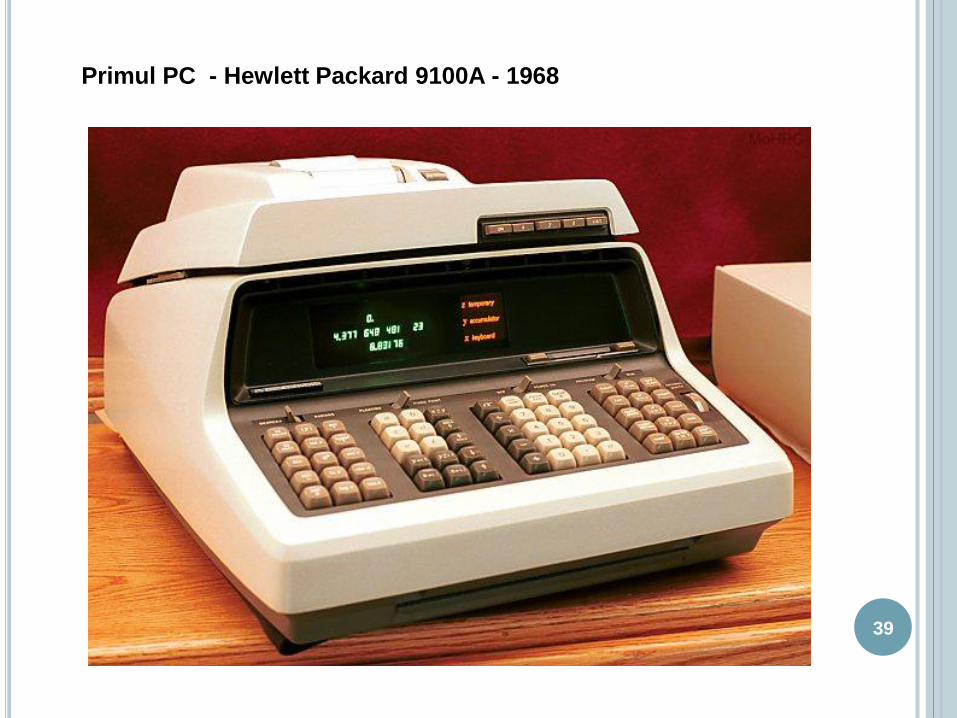
Primul PC - Hewlett Packard 9100A - 1968
39
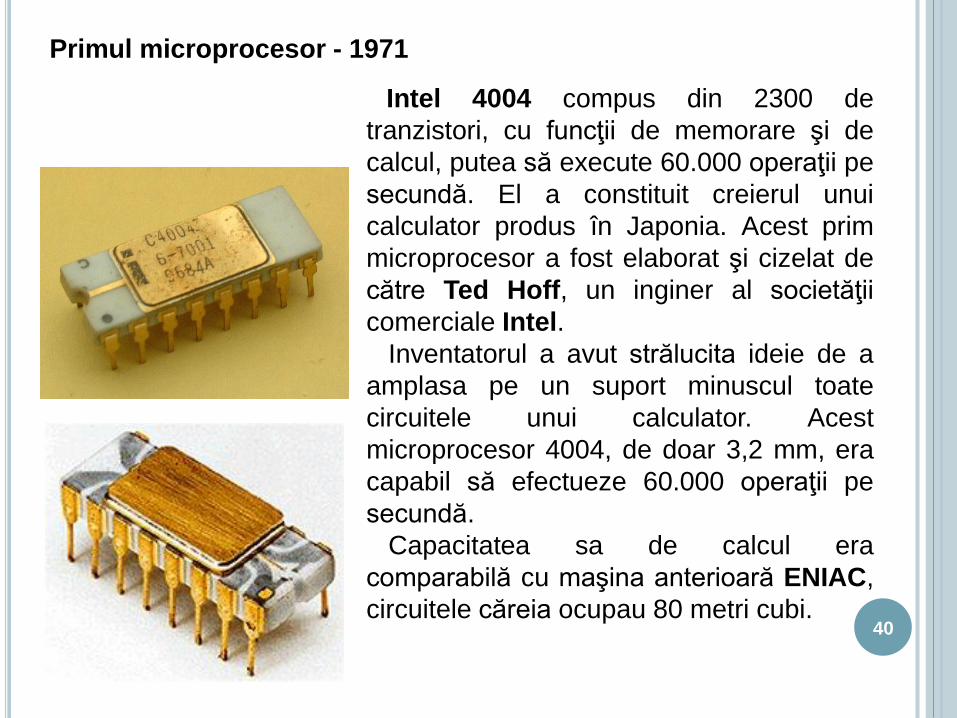
Primul microprocesor - 1971
Intel 4004 compus din 2300 de
tranzistori, cu funcţii de memorare şi de
calcul, putea să execute 60.000 operaţii pe
secundă. El a constituit creierul unui
calculator produs în Japonia. Acest prim
microprocesor a fost elaborat şi cizelat de
către Ted Hoff, un inginer al societăţii
comerciale Intel.
Inventatorul a avut strălucita ideie de a
amplasa pe un suport minuscul toate
circuitele unui calculator. Acest
microprocesor 4004, de doar 3,2 mm, era
capabil să efectueze 60.000 operaţii pe
secundă.
Capacitatea sa de calcul era
comparabilă cu maşina anterioară ENIAC,
circuitele căreia ocupau 80 metri cubi.40
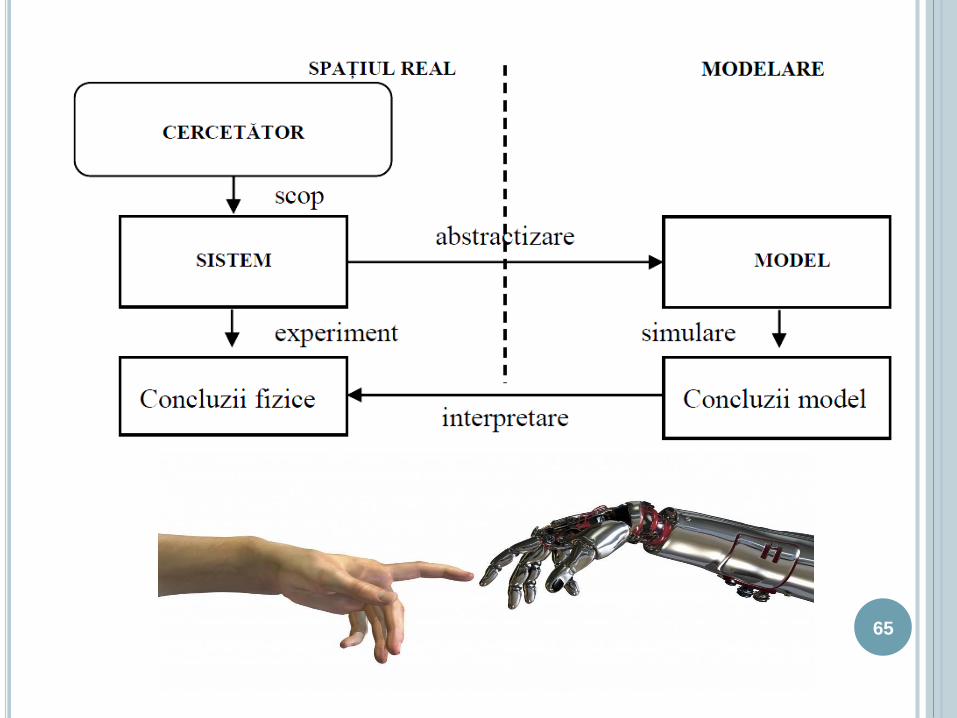
NOȚIUNILE DE SISTEM ȘI MODEL
41
Sistem
Sistemul se poate defini ca fiind un
ansamblu organizat de resurse și proceduri,
în interacțiune sau interdependente, real
sau abstract, care realizează un set de
funcții specifice.
42
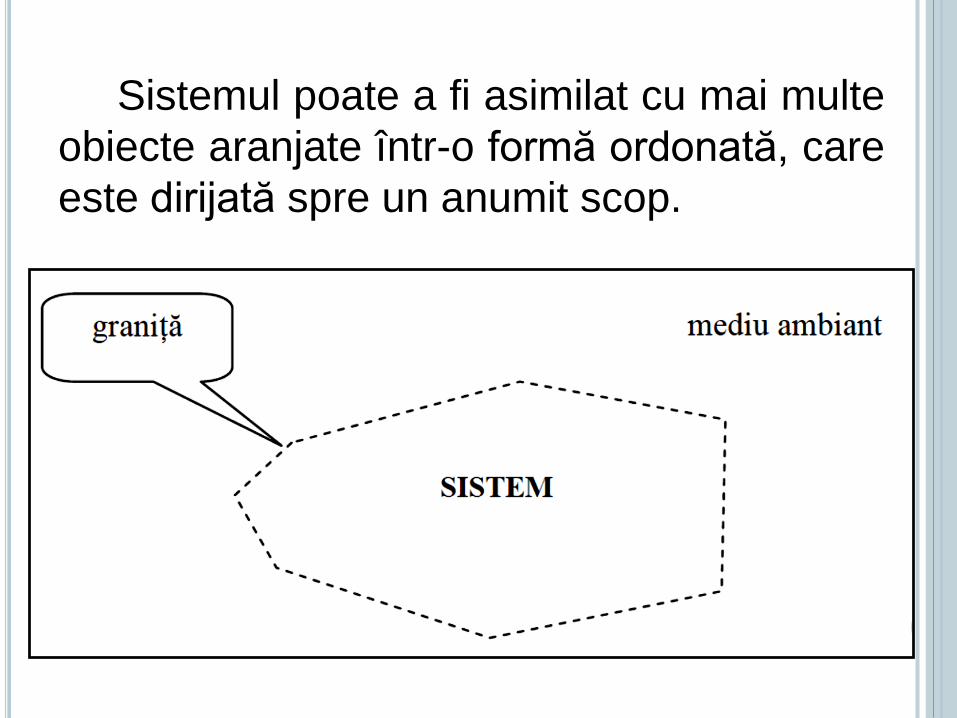
Sistemul poate a fi asimilat cu mai multe
obiecte aranjate într-o formă ordonată, care
este dirijată spre un anumit scop.
43
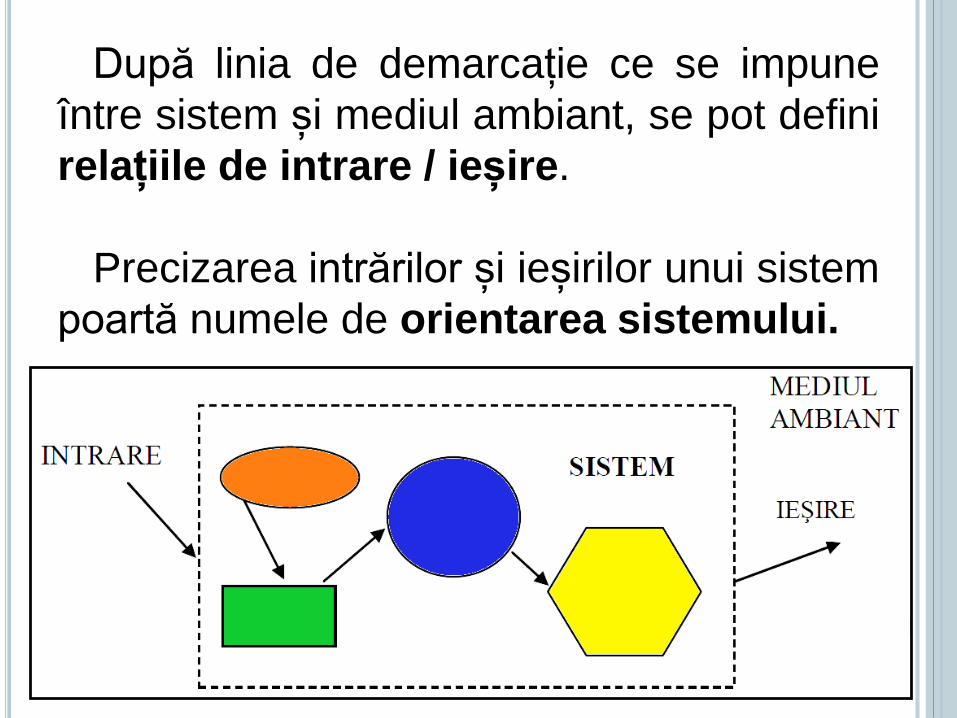
După linia de demarcație ce se impune
între sistem și mediul ambiant, se pot defini
relațiile de intrare / ieșire.
Precizarea intrărilor și ieșirilor unui sistem
poartă numele de orientarea sistemului.
44
Tipuri de sisteme
Sisteme deschise
Sisteme închise
45
Un sistem deschis definește
interacțiunea părților componente cu
orice entitate din mediu.
46
Sistemul închis este izolat față de
mediu, fiind separat de acesta prin
intermediul graniței.
47
Cea mai simplă entitate cu o posibilă
funcționare de sine stătătoare se numește
element.
Un set de elemente din structura
sistemului se numește subsistem.
Noțiunea de sistem are un caracter
relativ, în sensul că orice sistem poate fi
descompus în subsisteme și la rândul lui
poate fi privit ca subsistem al unui sistem
mai complex. 48
Teoria sistemelor investigheazǎ atât
principiile comune tuturor sistemelor
complexe, cât și modelele (în general,
matematice) care pot fi folosite pentru a
descrie aceste sisteme.
49
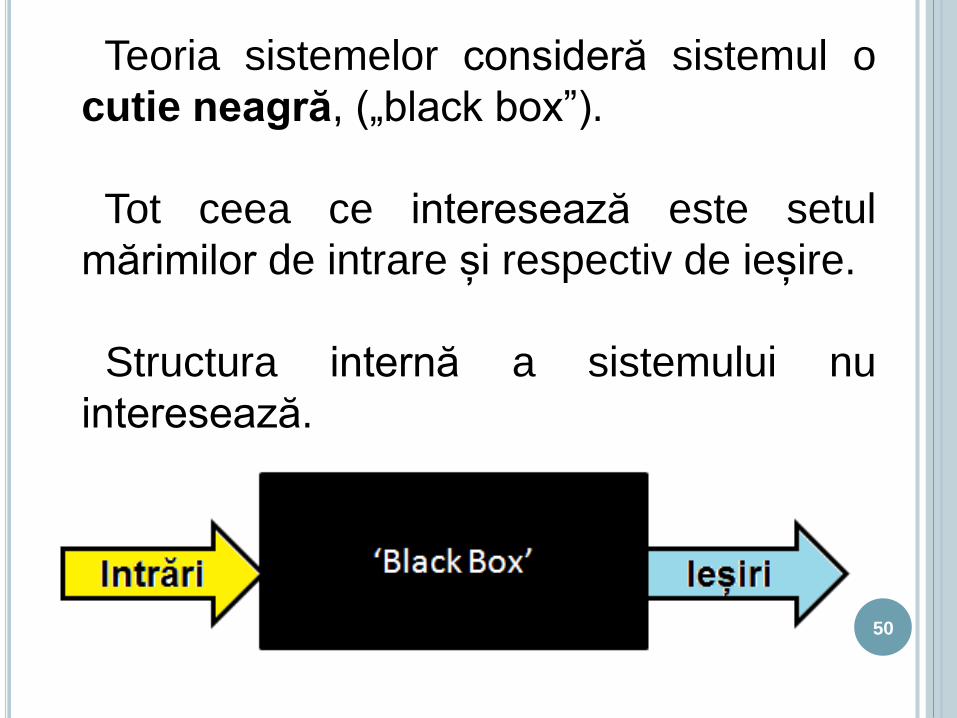
Teoria sistemelor consideră sistemul o
cutie neagră, („black box”).
Tot ceea ce interesează este setul
mărimilor de intrare și respectiv de ieșire.
Structura internă a sistemului nu
interesează.
50
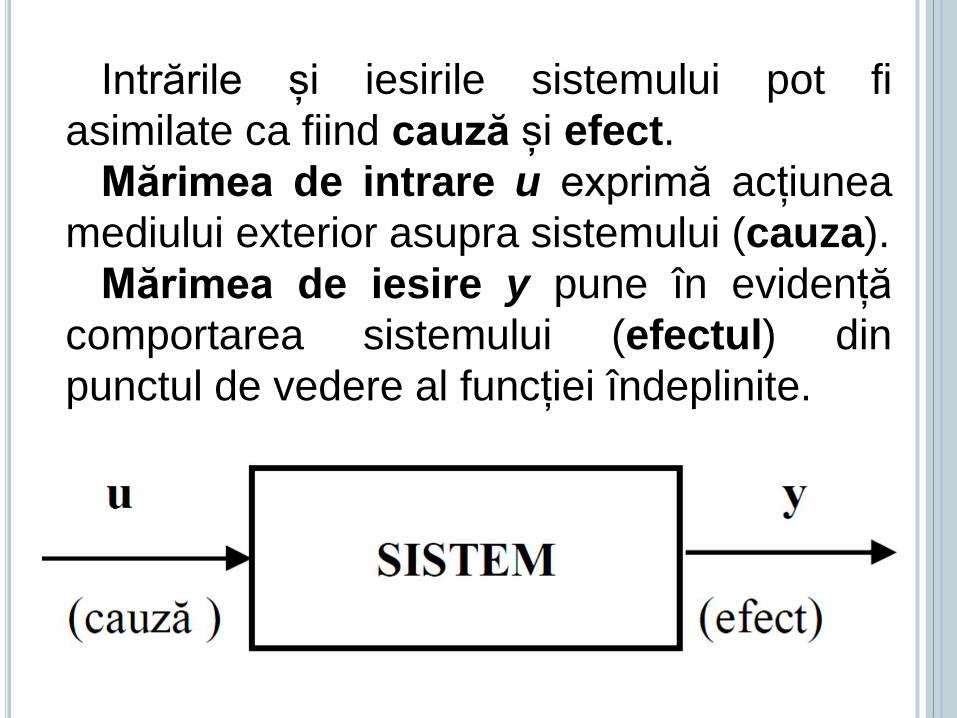
Intrările și iesirile sistemului pot fi
asimilate ca fiind cauză și efect.
Mărimea de intrare u exprimă acțiunea
mediului exterior asupra sistemului (cauza).
Mărimea de iesire y pune în evidență
comportarea sistemului (efectul) din
punctul de vedere al funcției îndeplinite.
51
Schema structuralǎ (bloc) a unui sistem
Schema bloc constǎ în reprezentarea
convenționalǎ graficǎ a unui sistem și
pune în evidențǎ natura, rolul blocurilor
utilizate în transformarea și prelucrarea
mișcǎrii și a informației precum și sensul
de transmitere.
52
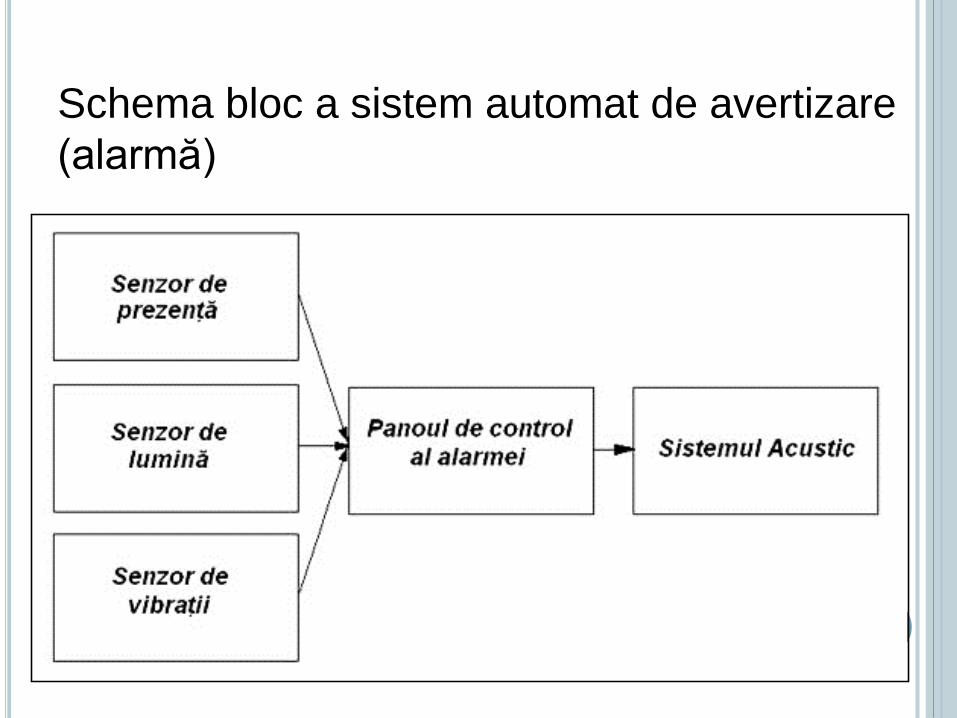
Schema bloc a sistem automat de avertizare
(alarmă)
53
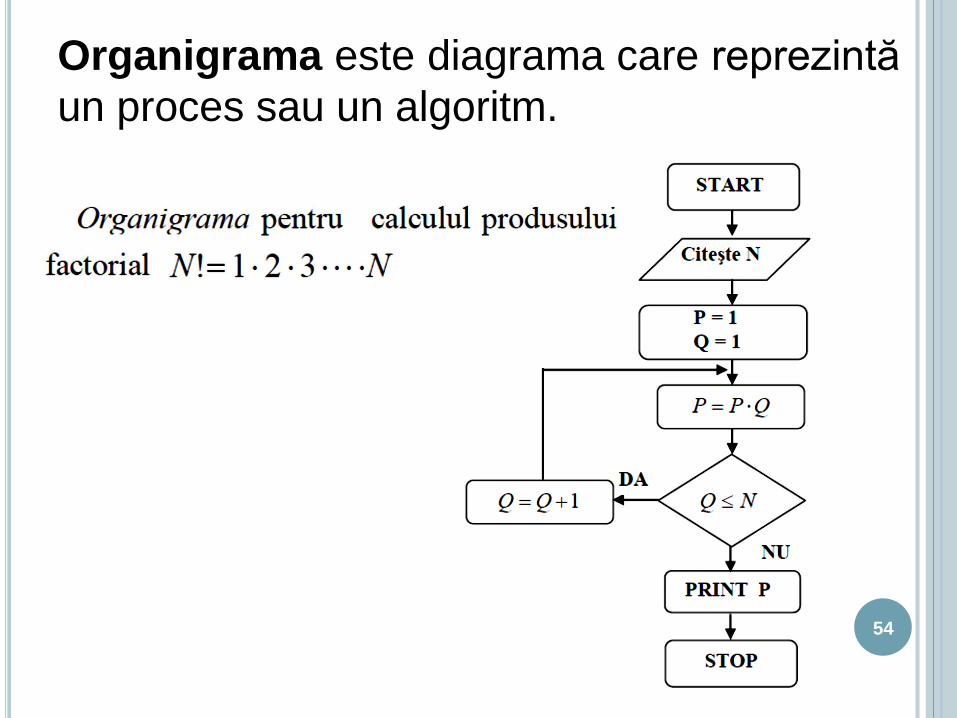
Organigrama este diagrama care reprezintă
un proces sau un algoritm.
54
De obicei, interacțiunile dintre sistem și
mediul ambiant se grupează în mărimi
de intrare și mărimi de ieșire.
Uneori, la acestea se adaugă și o serie
de perturbații produse de diferiți factori
din mediul ambiant.
55
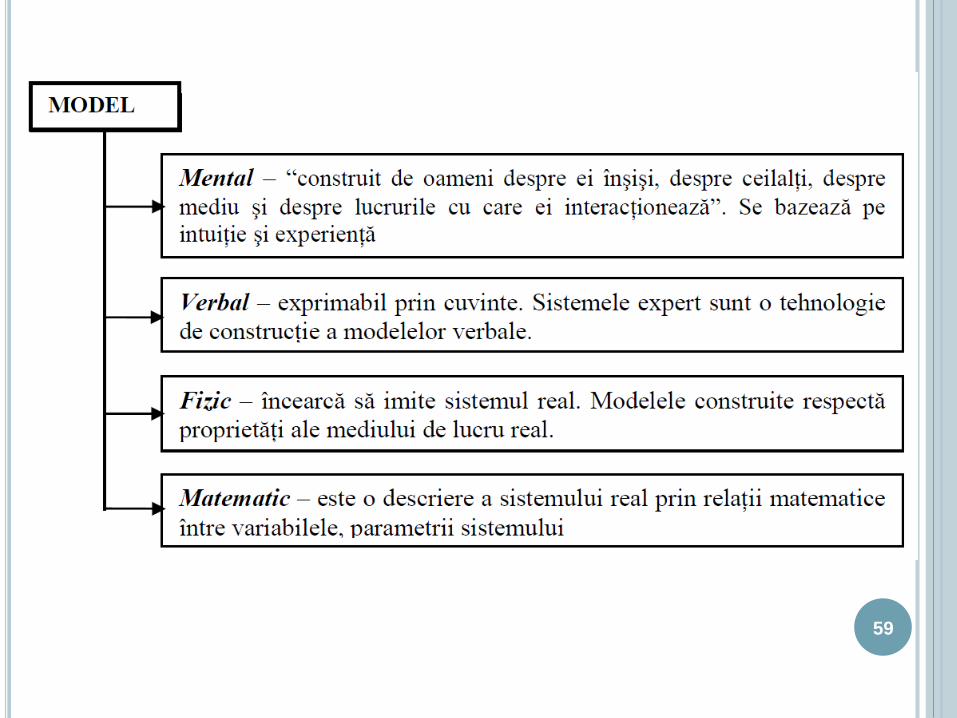
Model, construcția modelului
Modelul reprezintă aspectele esențiale
ale unui sistem (existent sau care
urmează să fie construit) și cunostințele
asupra acelui sistem sub o formă
utilizabilă.
56
Construirea modelului se poate baza pe
două principii:
1. Există cunostințe și intuiție despre sistem.
1. Există date experimentale (intrare / ieșire)
din sistem.
57
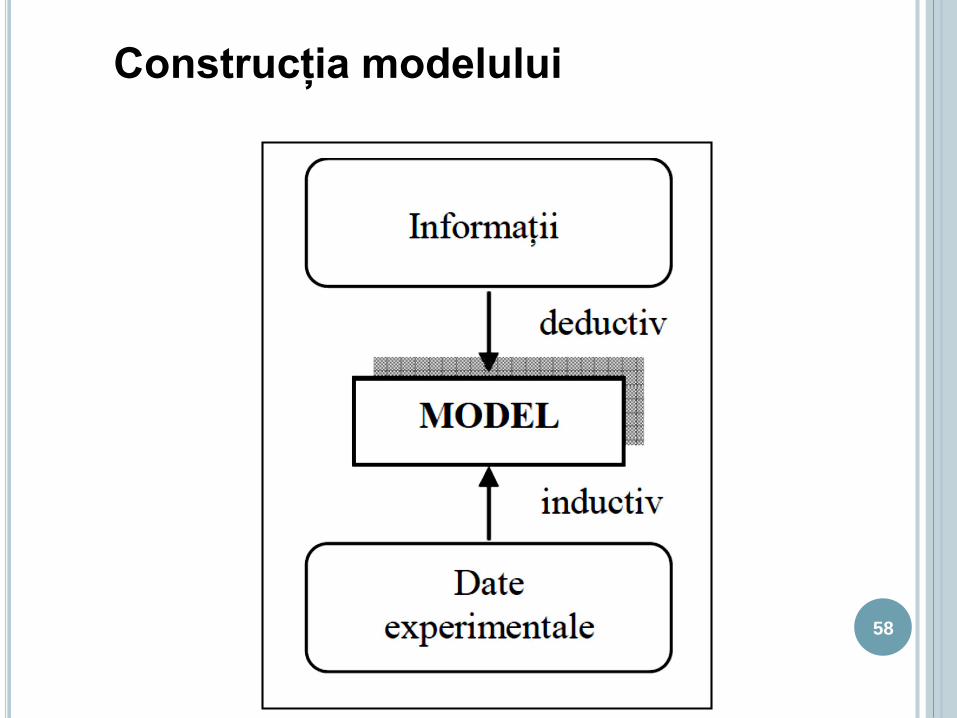
Construcția modelului
58
59
Cunostințele trebuie prezentate într-o
formă utilizabilă. Acesta este un aspect
esențial, deoarece modelul trebuie să
ofere o bază pentru noi decizii.
Dacă modelul este prea complicat,
acesta devine greu de utilizat. Dacă la
construcția modelului se renunță la o
serie de aspecte, există posibilitatea ca
acesta să fie inutil și departe de realitate.
60
Pornind de la real și abstract, modelele
pot fi clasificate în două categorii principale:
• modele materiale (sau fizice);
• modele abstracte (sau formale).
61
Modelele fizice reprezintă o “machetă”
la o anumită scară a sistemului original.
Modelul fizic este aplicabil doar dacă se
cunosc relațiile de similitudine cu
sistemul original.
62
Modele abstracte includ modelele
matematice.
Un model matematic al unui sistem
este o reprezentare simbolică într-o
formulare matematică abstractă.
Simbolurile au sensuri matematice
precise, iar manipularea lor este conformă
cu regulile logicii și matematicii.
Relațiile matematice devin model prin
precizarea corespondențelor dintre
variabilele și parametrii sistemului.63
Modelarea se bazează pe compactizarea
conținutului unor cunostințe, cercetarea,
comunicarea eficientă și proiectarea unui
sistem.
64
65
SISTEME AUTOMATE LA AUTOVEHICULE
66
Sistemele automate de siguranță
ale autovehiculelor
Sistemele de siguranță utilizate la
autovehicule sunt sisteme automate
inteligente care au scopul de a optimiza
caracteristicile active de siguranţă ale
acestora.
67
ABS (Antilock Brake System)
Sistemul de antiblocare a roţilor la frânare
Sistemul ABS a fost patentat în anul
1936 sub denumirea AntiBlockierSystem.
Primele autovehicule de serie care au
utilizat sistemul ABS produs de firma
Bosch în anul 1976 au fost fabricate de
Mercedes-Benz.68
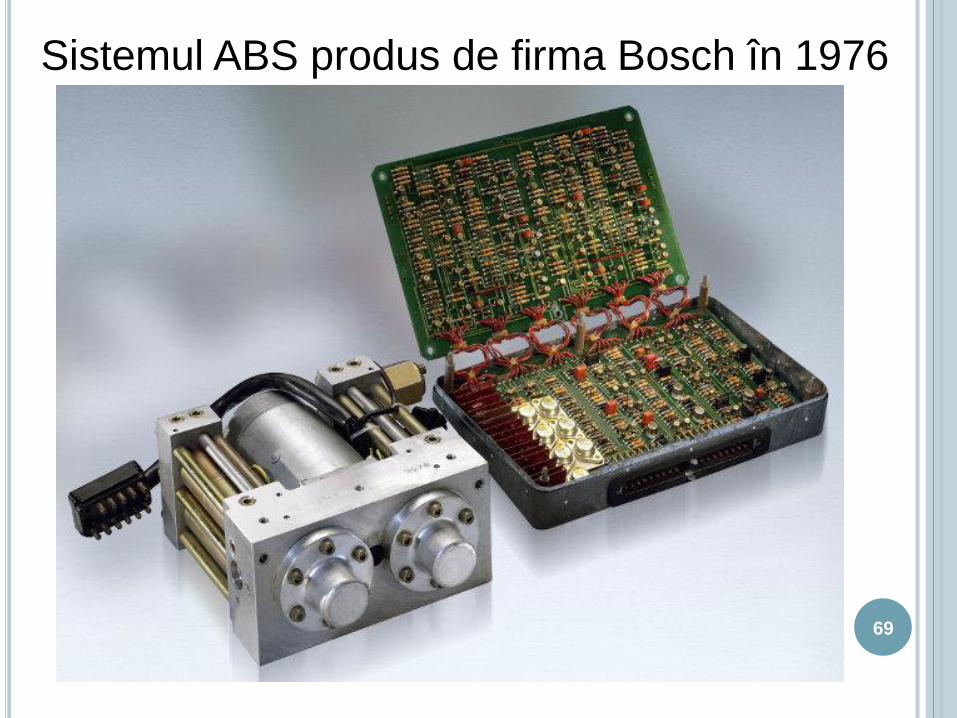
Sistemul ABS produs de firma Bosch în 1976
69
Sistemul previne blocarea roţilor în
timpul procesului de frânare.
Sistemul ABS este considerat sistem de
siguranţă activă pentru că prin folosirea lui
scade probabilitatea de coliziune prin
mărirea deceleraţiei de frânare şi a
manevrabilităţii autovehiculului.
70
În condiții ideale, un autovehicul are
nevoie de aproximativ 5 secunde pentru
a se opri de la o viteză de 100 km/h,
însă tot la această viteză o roată poate fi
blocată aproape instantaneu dacă
pedala este apăsată cu putere la
maximum și nu este utilizat sistemul
ABS, intervenind deraparea sau
patinarea.
71
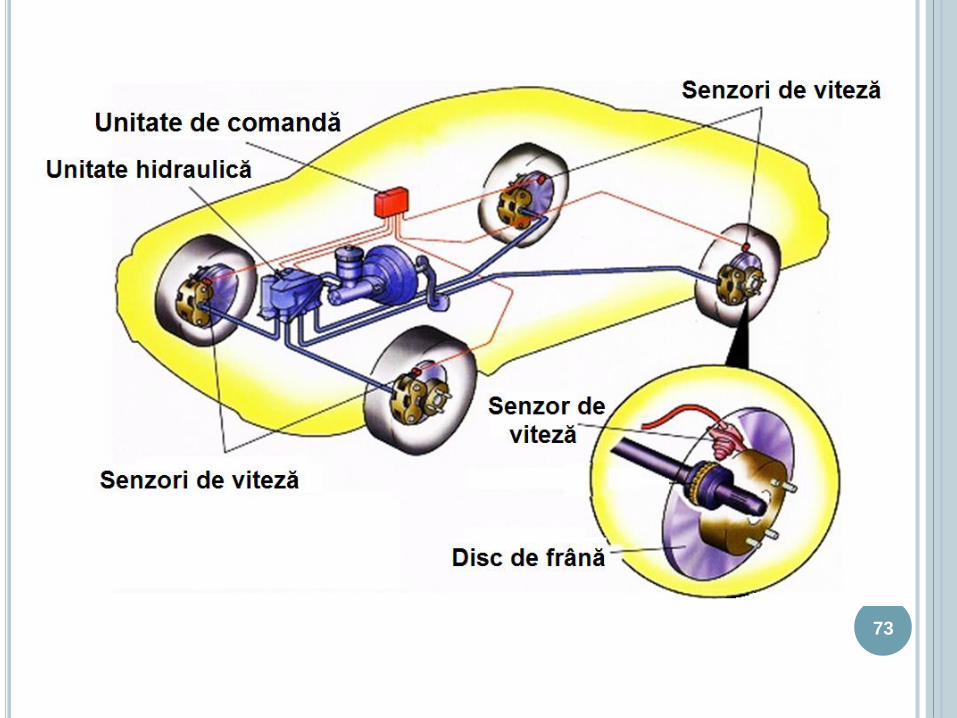
Componentele principale utilizate de sistemul
ABS sunt:
• unitate electronică de comandă
• senzori de viteză (turație) pentru fiecare
roată
• unitate hidraulică modulatoare de presiune
72
73
Unitatea electronică monitorizează în
permanență viteza de rotație a roților, prin
intermediul senzorilor poziționați pe
fiecare roată.
În momentul în care este detectată o
decelerare prea bruscă a roții, imediat
înainte de momentul în care aceasta
urmează să se blocheze, unitatea
hidraulică comandă scăderea presiunii
din circuitul de frânare pentru a permite
roții să continue să se învârtă. 74
Sistemul ABS este atât de rapid, încât
operațiunea de scădere - creștere a
presiunii în circuitul de frânare se face
de câteva ori pe secundă, cele mai
performante sisteme putând repeta
acțiunea de circa 15-20 de ori pe
secundă.
Această alternanță de presiune este și
ceea ce simte șoferul în pedala de frână
atunci când sistemul lucrează. Practic,
senzația este percepută ca o vibrație.75
În timpul unei frânări, cu cât direcția
este menținută mai mult dreaptă, cu atât
sistemul ABS este mai eficient.
Atunci când se virează, sistemul reduce
presiunea în circuit pentru a permite
roților o viteză de rotație mai mare, ce
face mult mai eficintă o manevră de
evitare. Așadar, la o frână de urgență
volanul menținut drept (sau cât mai drept)
scade distanța de frânare. Doar dacă este
posibil și nu trebuie evitat un obstacol.76
EBD (Electronic Brakeforce Distribution)
Sistemul electronic de distribuire a forţei
de frânare
Sistemul EBD lucrează în tandem cu
sistemul ABS, reglând forţa de frânare
aplicată roţilor pentru a menţine stabilitatea
şi direcţia.
Forța de frânare va fi distribuită electronic
la roata care are aderența maximă.77
ESP (Electronic Stability Program)
Sistemul de control electronic al
stabilităţii
Sistemul de control electronic al
stabilităţii ESP a fost implementat de
firma Bosch și montat pe autoturismele
de serie Mercedes şi BMW în 1987.
Sistemul ESP are rolul de a detecta şi
de a micşora efectul derapajului uneia
sau al mai multor roţi. 78
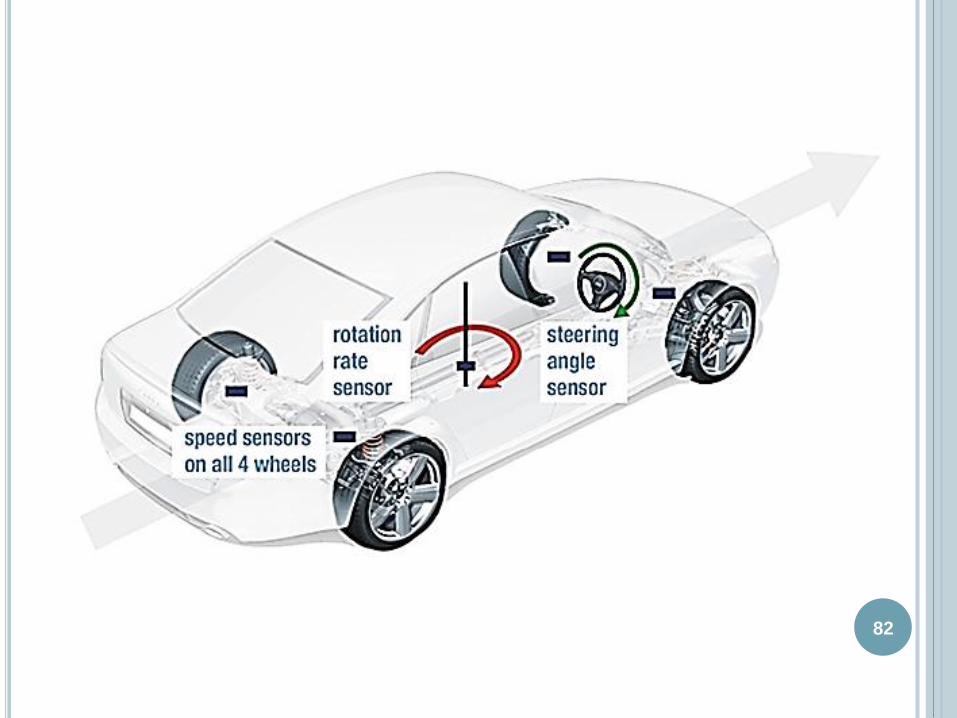
Sistemul ESP funcționează împreună
cu sistemul ABS. Unitatea de control
electronic ECU primește informațiile
provenite de la senzorii de viteză ai
roților, de la senzorul unghiului de virare
al volanului și de la accelerometre.
Combinand informațiile primite, ECU va
decide dacă autovehiculul este sau nu
în derapaj și dacă se abate de la
traiectoria dorită de conducător și va
acționa asupra sistemului de frânare și
asupra turației motorului.79
80
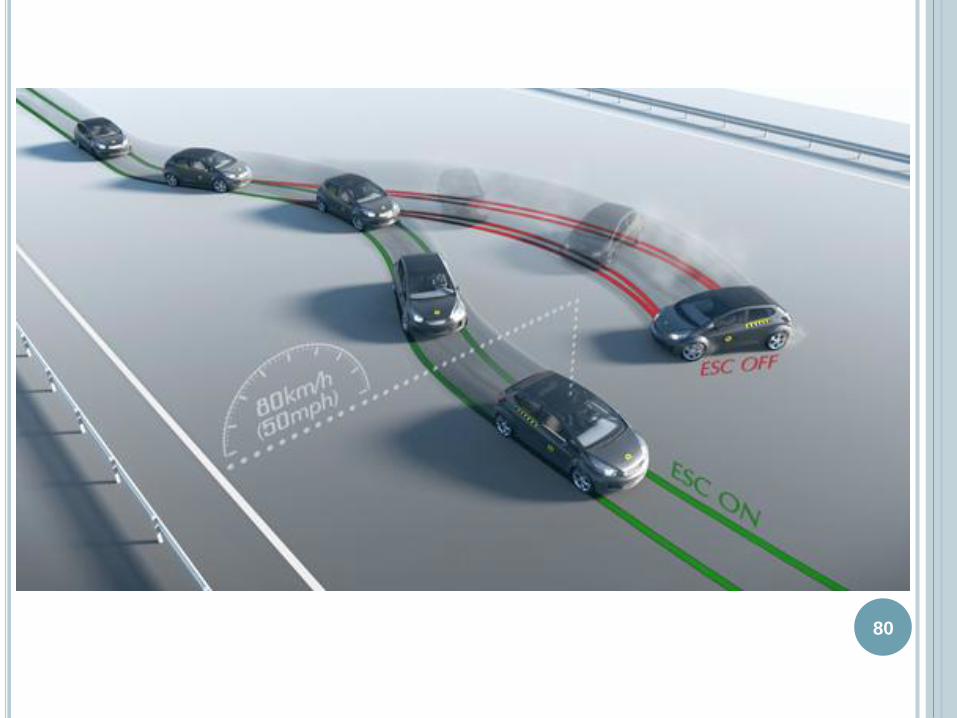
Diferenţa față de sistemul ABS constă
în faptul că la acest sistem semnalele
primite de la senzori sunt monitorizate în
permanenţă şi comparate cu cele ale
unui model de referinţă, sistemul oferind
un răspuns mult mai rapid.
Autovehiculul va frâna individual roțile
și va modifica turația motorului, în așa fel
încât acesta să revină pe traiectorie.81
82
ETC (Electronic Traction Control)
TRC (Traction Control System)
Sistemul de control al tracţiunii
ASR (Acceleration Slip Regulation)
Sistemul de reglare a alunecării la
accelerare
Sistemul ETC este un sistem de
siguranță activă, intregrat de obicei
în sistemul ESP și care folosește
informații de la sistemul ABS pentru a
putea funcționa.83
La majoritatea vehiculelor, controlul
tracțiunii este integrat în sistemul ESP
(Electronic Stability Program), dar sunt
și automobile care dispun doar de acest
sistem fără a dispune de celelalte funcții
ale sistemului ESP.
84
Practic, acest sistem joacă rolul unui
diferențial autoblocabil incipient, fiind
foarte util atunci când roțile ajung pe
suprafețe cu coeficienți de aderență
diferiți (de exemplu o roată pe astfalt și
una pe gheață).
85
Atunci când sistemul detectează o
diferență mare de viteză între roțile
aceleași punți motoare (prin intermediul
senzorilor de viteză ai sistemului ABS),
în funcție de situație, în fază incipientă
va frâna roata cu viteza de rotație mai
mare și dacă este necesar, sistemul va
acționa și prin reducerea cuplului motor.
86
Sistemul ETC preia rolul diferențialului,
al cărui mare dezavantaj este că
transmite tot cuplul motor către roata cu
viteza de rotație mai mare. Acest lucru
poate fi observat iarna, pe suprafețe
alunecoase, când o roată se învârtește
execesiv, iar cealaltă roată stă pe loc.
87
Sistemul de control al tractiunii ETC
combate acest dezavantaj prin
transferarea unei părți din viteză și
implicit din cuplu motor, de la roata cu
viteza mai mare de rotație către roata
cu viteza mai mică de rotație.
88
ACC (Adaptive Cruise Control)
Sistem adaptiv de navigaţie
Sistemul adaptiv de navigație fost
utilizat de Mitsubishi în 1995 pe modelul
Diamante și apoi dezvoltat de Mercedes.
Rolul acestui sistem este de a corecta
viteza de deplasare prin determinarea
vitezei autovehiculului din faţă şi a
distanţei până la acesta, folosind un sistem
radar sau laser. 89
Sistemul ACC permite vehiculului să
încetinească atunci când se apropie de
alt vehicul și să accelereze apoi la viteza
presetată atunci când condițiile de trafic
o permit.
Beneficiul principal este confortul de
conducere sporit, astfel încît
conducătorul se poate odihni în timpul
călătoriilor lungi.
90

91
LDWS (Lane Departure Warning System)
LKAS (Lane Keeping Assist System)
Sistemul de atenţionare a depăşirii benzii
Primul constructor care a utilizat sistem de
tip LDW pe autoturismele de serie a
fost Nissan în 2001, pe modelul Cima.
92
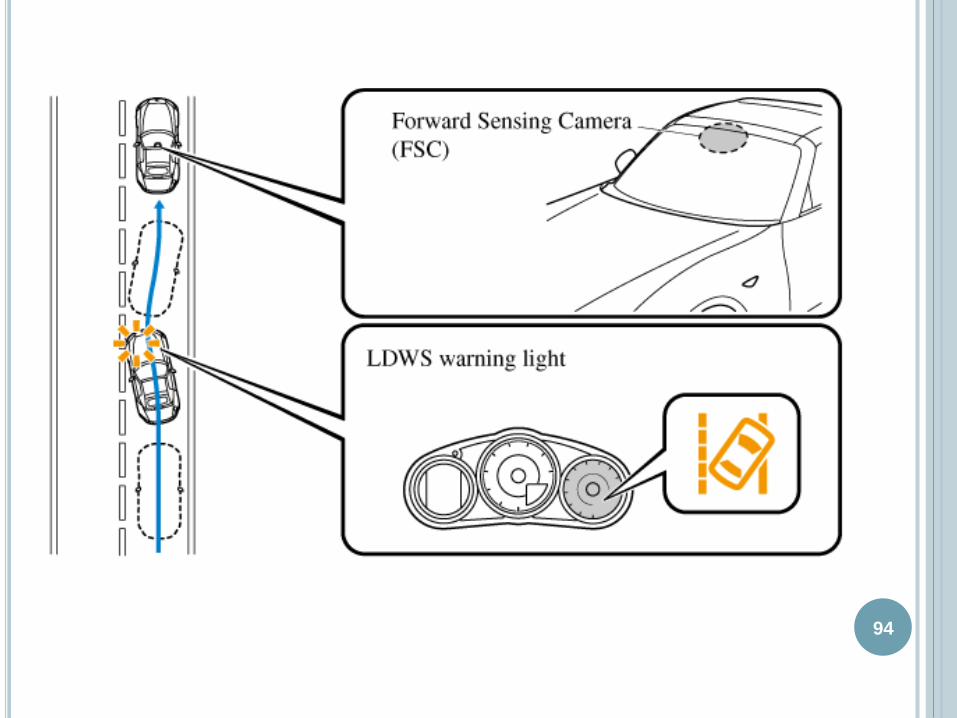
Sistemul LDW utilizează o cameră
video, montată în zona superioară a
parbrizului.
Camera va monitoriza, în locul
coducătorului, modul în care autoturismul
se deplasează pe culoarul delimitat de
liniile de demarcație.
93
94
În eventualitatea în care vehiculul va
atinge, sau va depăși neintenționat
marcajul (sistemul nu reacționează
dacă conducătorul autovehiculului
acționează semnalizarea, sau
accelerează pentru o depășire),
LDWS va transmite un semnal acustic
de avertizare sau va induce vibrații în
volan ori în scaun.
95

96

Sistemele automate confort ale
autovehiculelor
Pe lângă sistemele de sigutanță, o
continuă dezvoltare o au și sistemele de
confort ale autovehiculelor.
97
IPAS (Intelligent Parking Assist System)
Sistemul de asistență la parcare
Sistemul IPAS a fost utilizat pentru prima
dată de Toyota în anul 1999 la modelul
Prius.
98
99
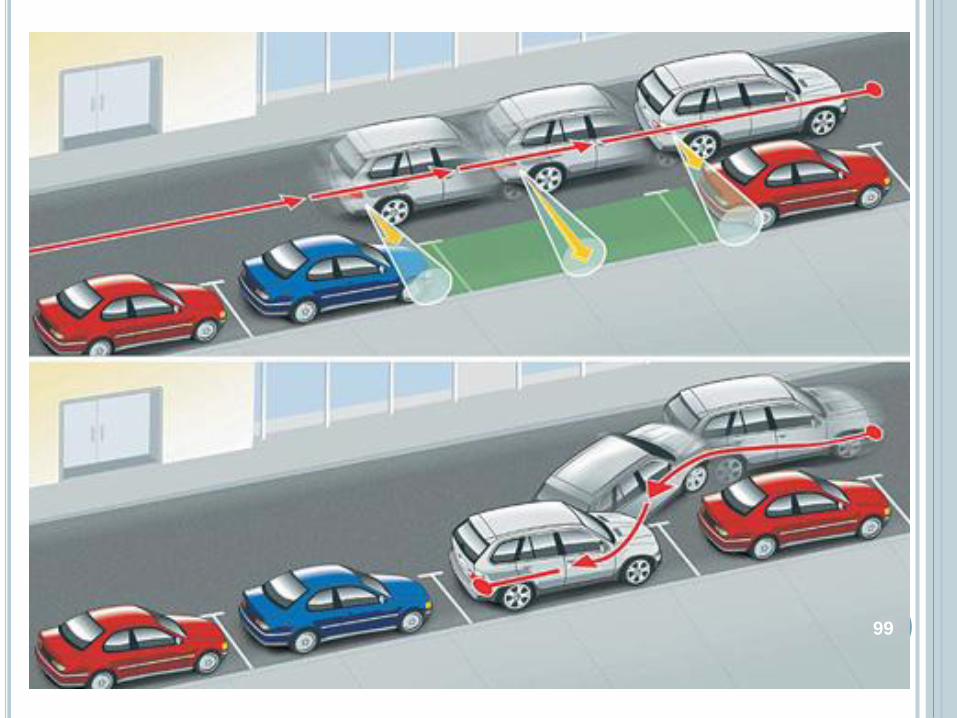
Sistemul de asistență la parcare
utilizează senzorii pentru a culege
informații privind distanțele până la
diferitele obstacole din mediul ambiant.
De cele mai multe ori sunt utilizați
senzori ultrasonoci.
100
Auto Light System
Sistemul automat de aprindere a farurilor
Sistemul automat de aprindere a farurilor
comandă în mod automat (dacă este
activat) aprinderea și stingerea farurilor în
situațiile în care este nevoie.
101
Funcționarea sistemului este bazată
pe un senzor sensibil la lumină.
102
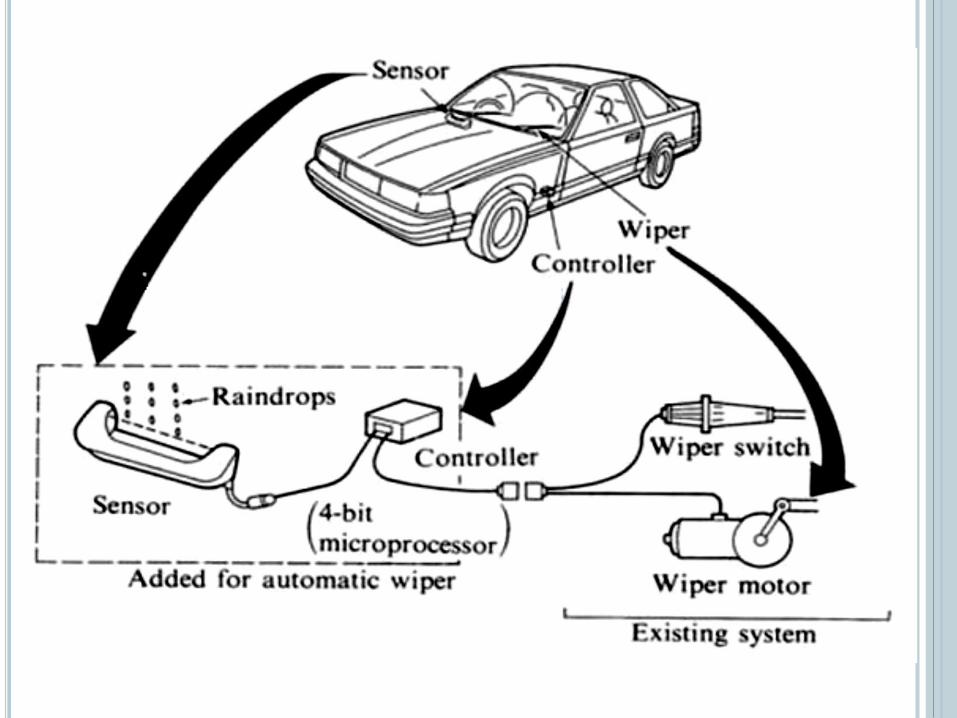
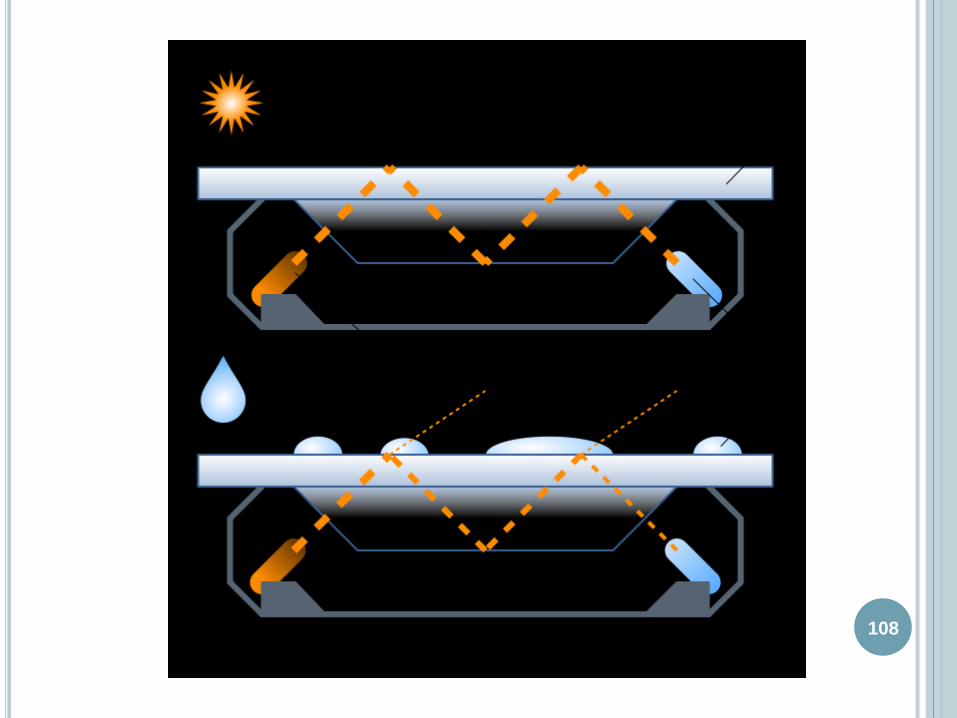
RSS (Rain Sensing System)
Sistemul de pornire automată a
ștergătoarelor de parbriz
Firma de automobile Peugeot, a fost
unul din primii constructori care a utilizat
pe modelele sale în serie senzorul de
ploaie începând cu anul 1994.
103
Senzorul de ploaie poate determina
dacă și cât de mult plouă, pentru a
semnala pornirea sau temporizarea
ștergătoarelor de parbriz.
104
105
Senzorul este montat pe partea
interioră a parbrizului.
De obicei senzorul este montat în
suportul de susținere a oglinzii
retrovizoare din partea de sus a
parbrizului, sau undeva la marginea
exterioară a câmpului de vizibilitate.
Aria de măsurare al acestuia are de
obicei o dimensiune de 2 cm².
106
Senzorul de ploaie se bazează pe
sistemul de măsurare optoelectronic cu
ajutorul unei diode de lumină (LED) ca
sursă de lumină, și o fotodiodă pentru
detecție.
107
108
SES (Smart Entry System)
Sistemul inteligent de deblocare a
portierelor
Sistemul inteligent de deblocare a
portierelor funcționează după principiul
transmisiei undelor radio între cheie și
autovehicul.
Cheia trebuie să se afle în apropierea
autovehiculului, nu neapărat în mână.
109
HAC (Hill Start Assist Control)
Sistemul de asistență la plecarea din
rampă
Acest sistem previne deplasarea spre
înapoi a vehiculelor şi permite pornirea
mai uşoară din rampă prin menţinerea
presiunii în sistemul de frânare, în timp ce
şoferul mută piciorul de pe pedala de
frână pe pedala de acceleraţie.
110
Dacă informaţiile de la senzori şi de la
ECU indică faptul că vehiculul este oprit
în rampă, sistemul menţine presiunea
în sistemul de frânare (timp de
maximum două secunde) după ce
şoferul eliberează pedala de frână,
până când acesta apasă pedala de
acceleraţie. Sistemul va reduce
presiunea în sistemul de frânare în
funcţie de apăsarea pedalei de
acceleraţie de către şofer şi de cuplul
motor generat. 111

SEMNIFICAȚIA SEMNALELOR SAU
INDICATOARELOR LUMINOASE DE
BORD LA AUTOVEHICULE
112
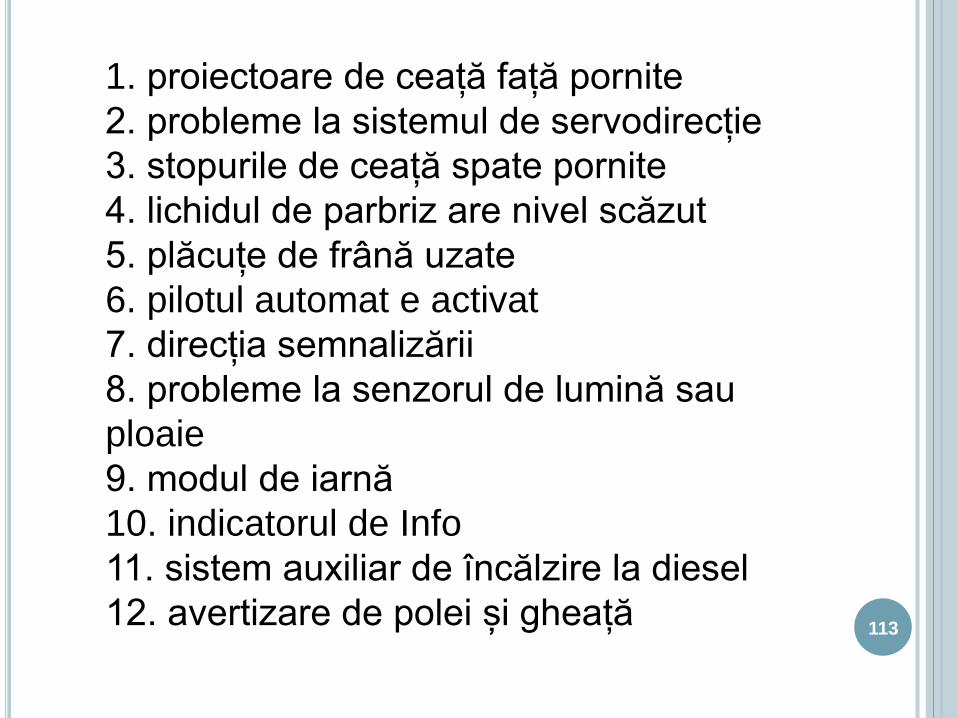
1. proiectoare de ceață față pornite
2. probleme la sistemul de servodirecție
3. stopurile de ceață spate pornite
4. lichidul de parbriz are nivel scăzut
5. plăcuțe de frână uzate
6. pilotul automat e activat
7. direcția semnalizării
8. probleme la senzorul de lumină sau
ploaie
9. modul de iarnă
10. indicatorul de Info
11. sistem auxiliar de încălzire la diesel
12. avertizare de polei și gheață113
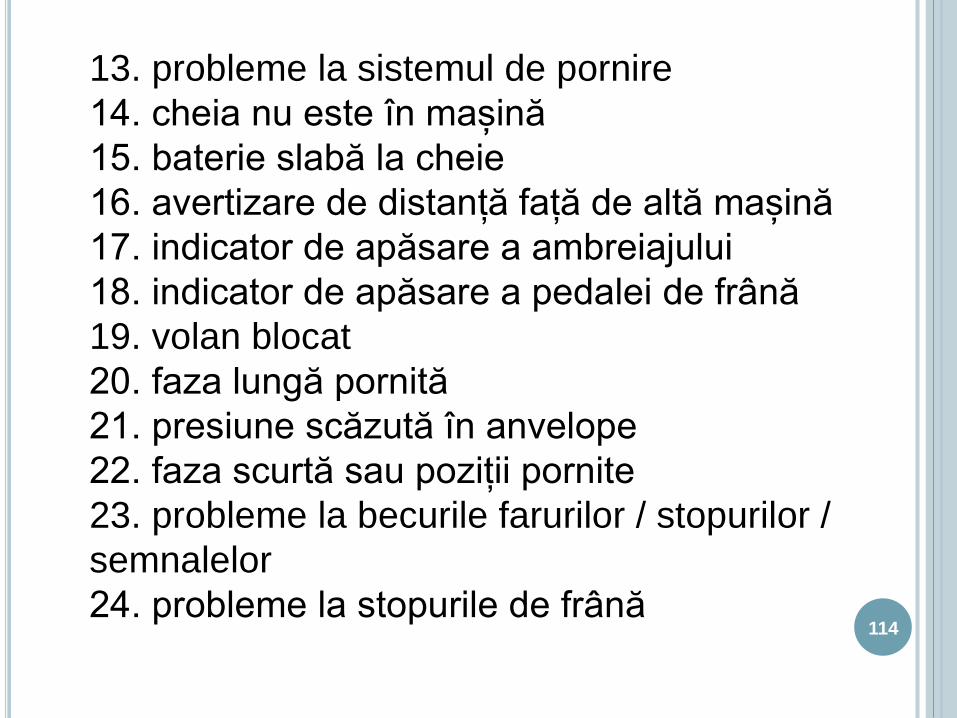
13. probleme la sistemul de pornire
14. cheia nu este în mașină
15. baterie slabă la cheie
16. avertizare de distanță față de altă mașină
17. indicator de apăsare a ambreiajului
18. indicator de apăsare a pedalei de frână
19. volan blocat
20. faza lungă pornită
21. presiune scăzută în anvelope
22. faza scurtă sau poziții pornite
23. probleme la becurile farurilor / stopurilor /
semnalelor
24. probleme la stopurile de frână114
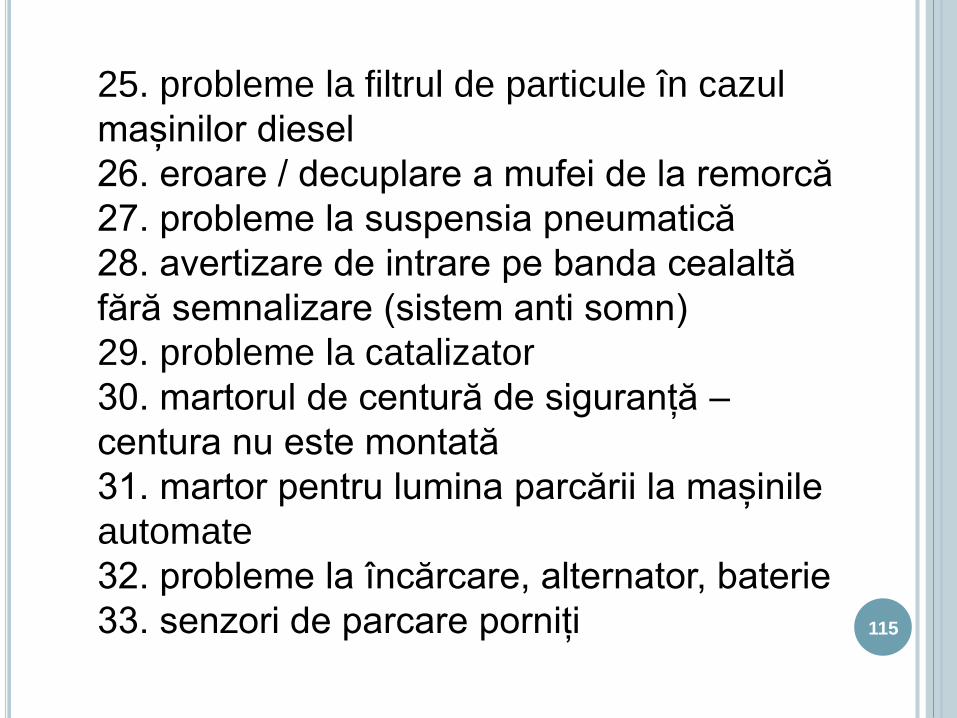
25. probleme la filtrul de particule în cazul
mașinilor diesel
26. eroare / decuplare a mufei de la remorcă
27. probleme la suspensia pneumatică
28. avertizare de intrare pe banda cealaltă
fără semnalizare (sistem anti somn)
29. probleme la catalizator
30. martorul de centură de siguranță –
centura nu este montată
31. martor pentru lumina parcării la mașinile
automate
32. probleme la încărcare, alternator, baterie
33. senzori de parcare porniți 115
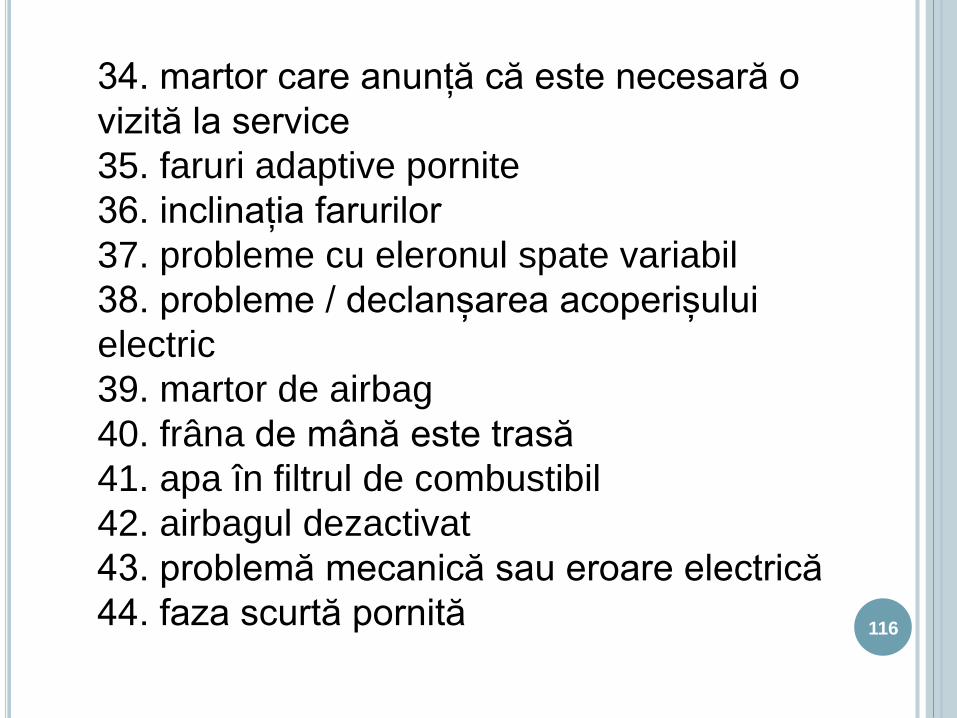
34. martor care anunță că este necesară o
vizită la service
35. faruri adaptive pornite
36. inclinația farurilor
37. probleme cu eleronul spate variabil
38. probleme / declanșarea acoperișului
electric
39. martor de airbag
40. frâna de mână este trasă
41. apa în filtrul de combustibil
42. airbagul dezactivat
43. problemă mecanică sau eroare electrică
44. faza scurtă pornită116
45. filtru de aer murdar, necesită înlocuire
46. modul ECO pornit
47. sistemul de asistență la coborarea în
pantă pornit
48. probleme la sistemul de răcire
49. probleme cu ABS-ul
50. probleme cu filtrul de carburant
51. portieră deschisă
52. capota deschisă
53. ai intrat pe rezervă de carburant, trebuie
să alimentezi
54. probleme la cutia de viteze automată
55. limitatorul de viteză este pornit117
56. probleme cu suspensii
57. presiune de ulei scazută
58. dezaburire parbriz
59. portbagaj deschis
60. ESP-ul este oprit
61. senzor de ploaie
62. probleme la motor sau la noxe
63. dezaburire lunetă
64. modul automat de ștergere a parbrizului
pornit
65. claxon
118
SENZORII AUTOVEHICULELOR
119
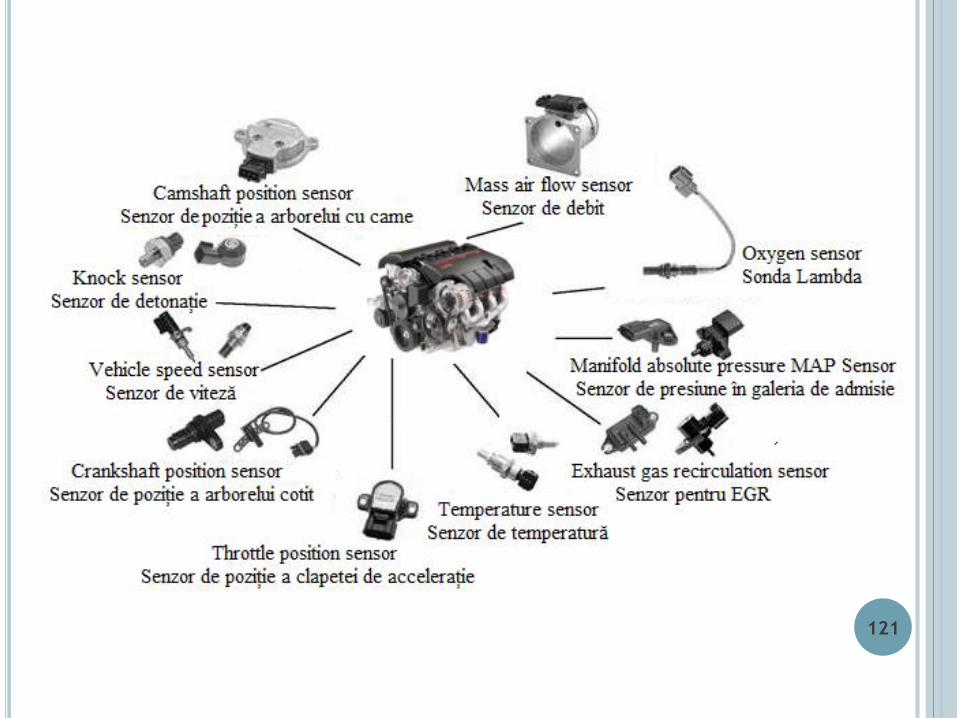
SENZORII MOTORULUI
Un număr mare de senzori sunt
folosiți de unitatea de comandă a
motorului (ECU) pentru a monitoriza
emisiile poluante, viteza, presiunea
sau temperatura și pentru a face
întregul sistem mai eficient.
120
121
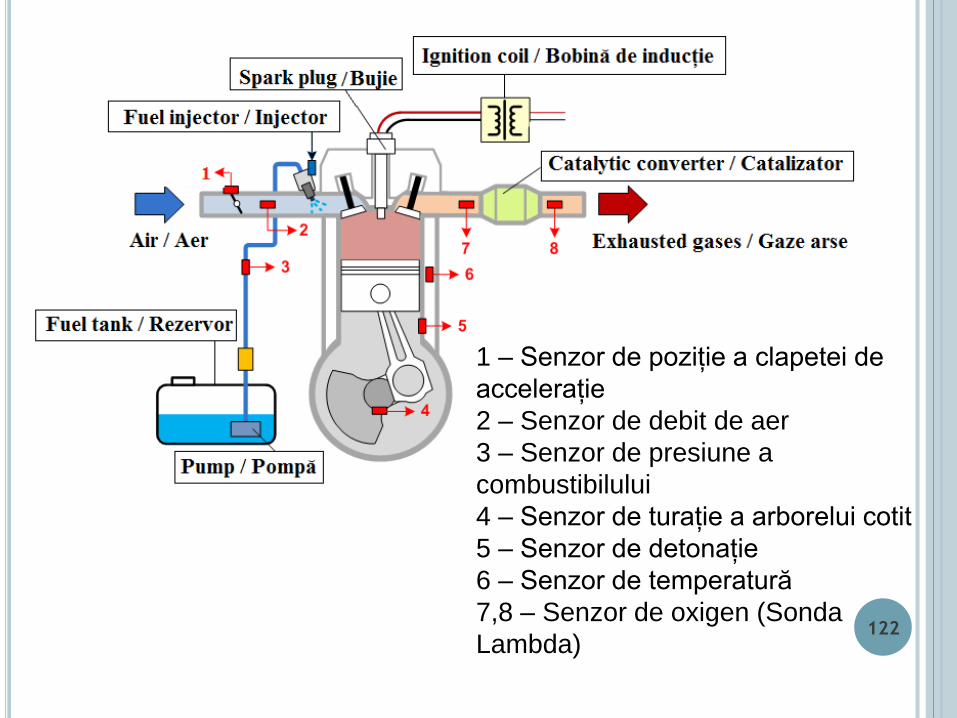
1 – Senzor de poziție a clapetei de
accelerație
2 – Senzor de debit de aer
3 – Senzor de presiune a
combustibilului
4 – Senzor de turație a arborelui cotit
5 – Senzor de detonație
6 – Senzor de temperatură
7,8 – Senzor de oxigen (Sonda
Lambda)122
Senzorul de poziție a clapetei de
accelerație
Senzorul de poziție a clapetei de
accelerație, măsoară unghiul de înclinare
a clapetei în funcție de poziția pedalei de
accelerație și transmite datele către
unitatea de control a motorului ECU.
Poziția clapetei de accelerație este
detectată de un comutator sau de un
potențiometru.123
124
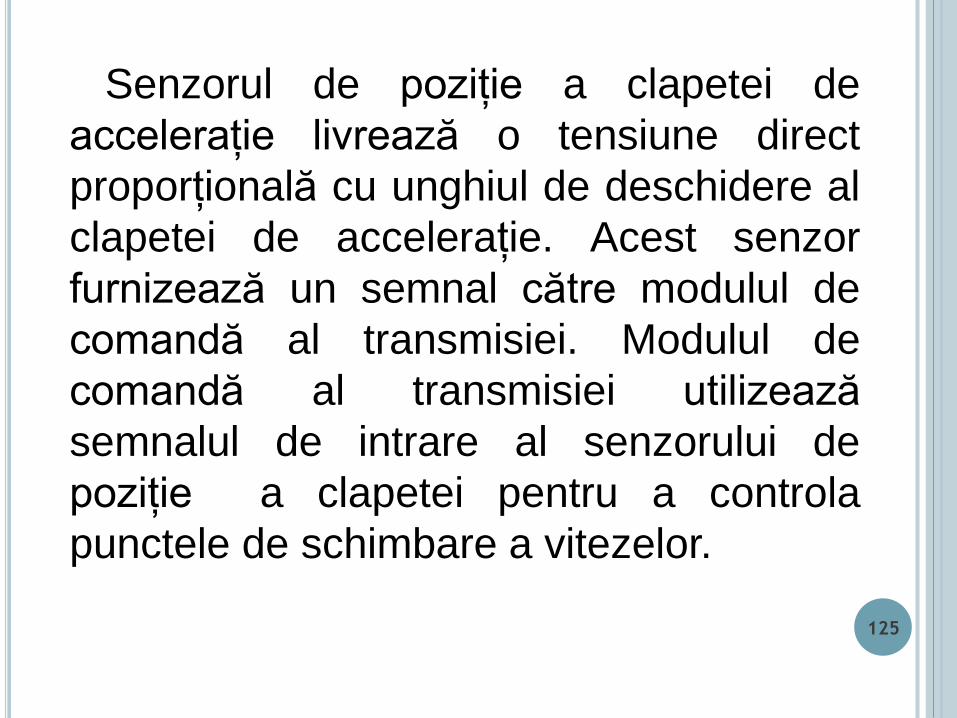
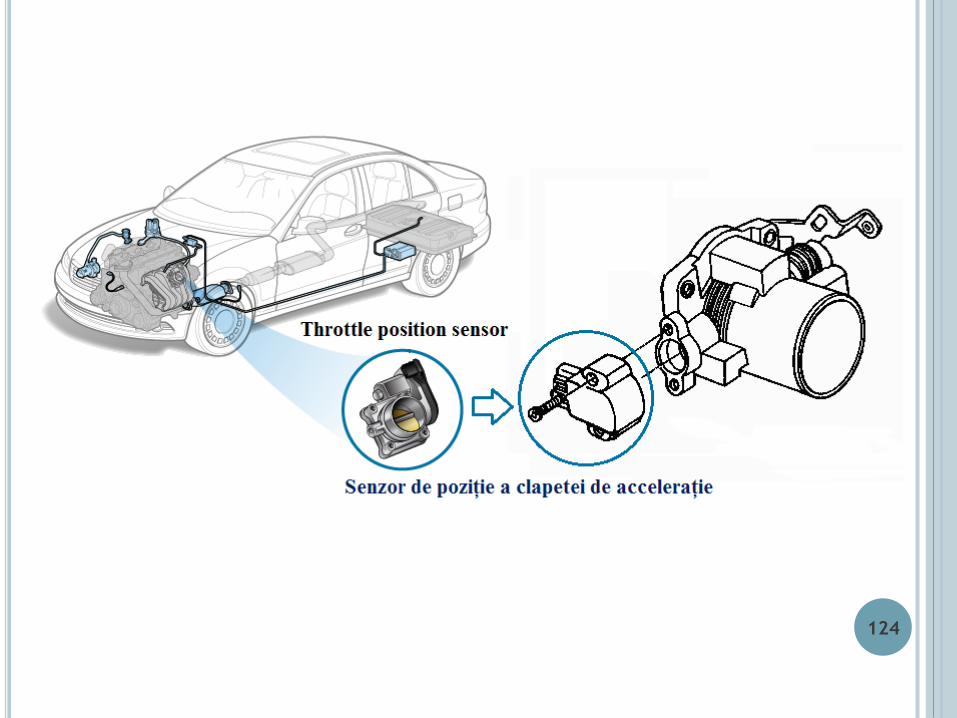
Senzorul de poziție a clapetei de
accelerație livrează o tensiune direct
proporțională cu unghiul de deschidere al
clapetei de accelerație. Acest senzor
furnizează un semnal către modulul de
comandă al transmisiei. Modulul de
comandă al transmisiei utilizează
semnalul de intrare al senzorului de
poziție a clapetei pentru a controla
punctele de schimbare a vitezelor.
125
126
Senzorul de poziție a clapetei de
accelerație, împreună cu senzorul de debit
de aer și senzorul de presiune în galeria de
admisie sunt indicatorii principali de
accelerație și de sarcină ai modulului de
comandă al motorului (ECM - Engine
control module). ECM primește informația
de la senzori pentru a controla funcționarea
motorului la accelerare.
127
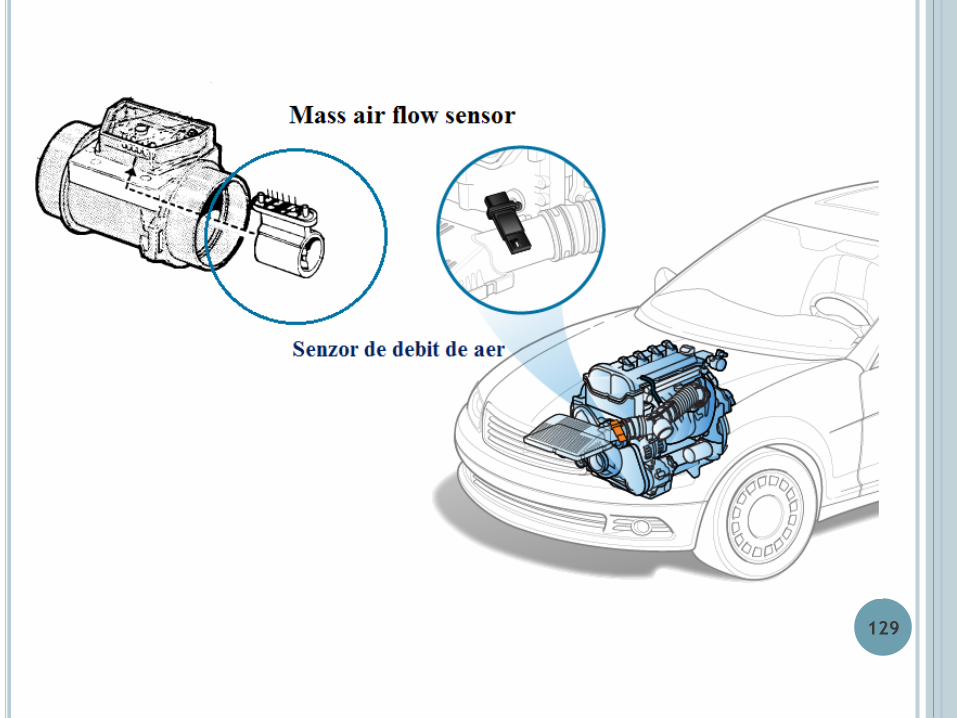
Senzorul de debit de aer (MAF)
Senzorul de debit de aer (MAF)
măsoară masa aerului care trece
dinspre sistemul clapetei de accelerație
până în galeria de admisie. Senzorul
transmite aceste informații la unitatea de
control a motorului, care ajută la
controlul raportului carburant-aer.128
129
Senzorii de debit folosesc curentul
electric pentru a măsura debitul de aer.
Elementul de detecție (elementul
sensibil), este fie un fir de platină (fir
cald), fie o grilă din folie nichel
(membrană încălzită). Elementul sensibil
este încălzit electric pentru păstrarea
unei temperaturi mai mari decât
temperatura aerului la intrare.
130
În cazul senzorilor cu membrană
încălzită, grila este încălzită la o
temperatură cu 75°C peste temperatura
aerului ambiant.
La senzorii cu fir cald, acesta se
încălzește cu 100°C peste temperatura
ambiantă. Trecerea aerului pe lângă
elementul sensibil îi provoacă răcirea,
facând ca intensiatea curentului necesar
pentru a menține elementul fierbinte să
crească.131
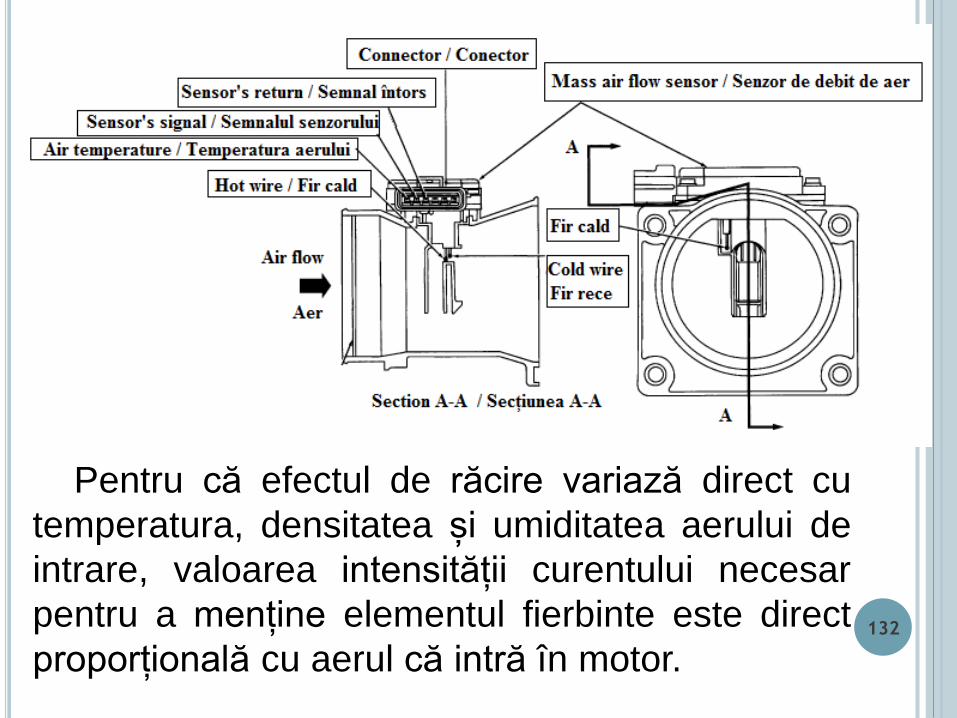
Pentru că efectul de răcire variază direct cu
temperatura, densitatea și umiditatea aerului de
intrare, valoarea intensității curentului necesar
pentru a menține elementul fierbinte este direct
proporțională cu aerul că intră în motor.132
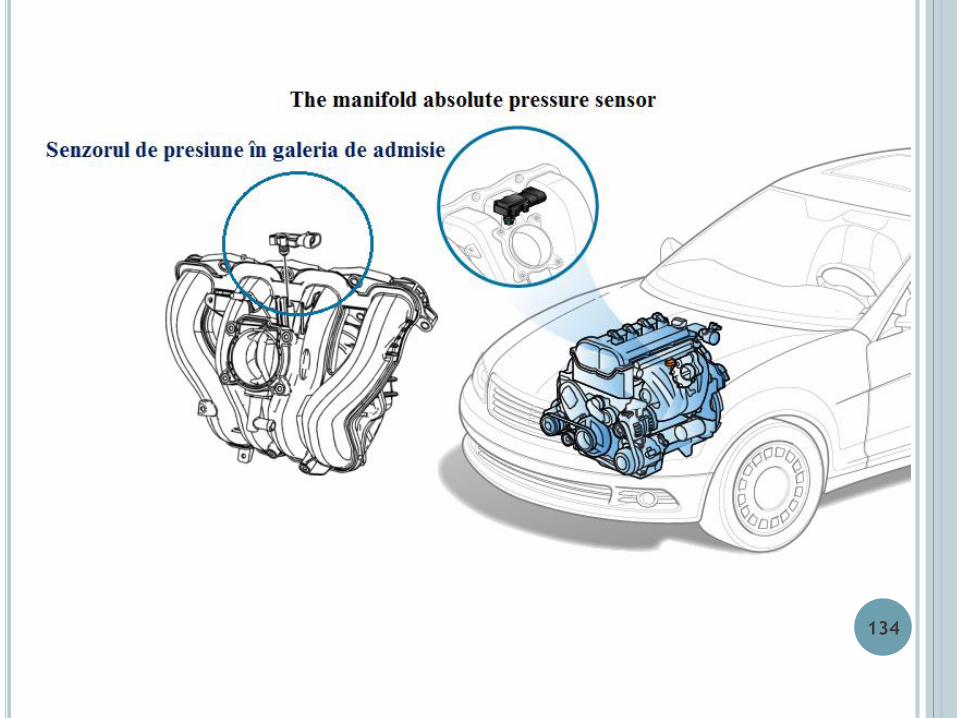
Senzorul de presiune din galeria de
admisie
Senzorii de presiune absolută măsoară
variațiile de presiune din galeria de
admisie, cauzate de schimbările de
sarcină și turație ale motorului și le
convertește în semnale electrice. Prin
monitorizarea tensiunii de ieșire, unitatea
de control a motorului detectează
presiunea din galeria de admisie și
utilizează aceste informații pentru a crește
sau scădea injectia de carburant ca
răspuns la aceste schimbări.
133
134
135
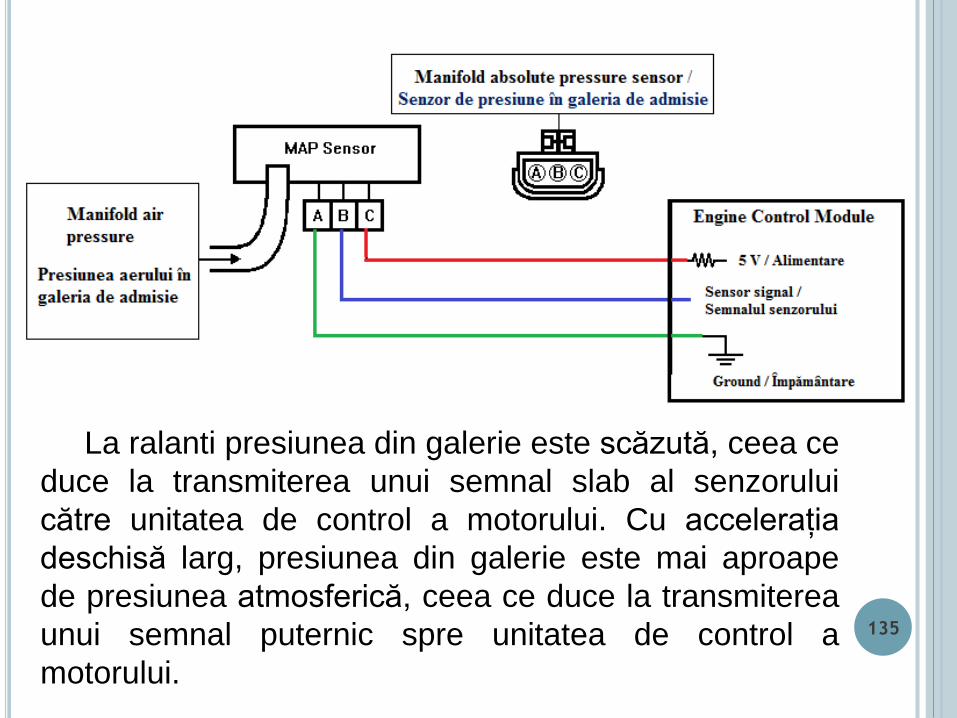
La ralanti presiunea din galerie este scăzută, ceea ce
duce la transmiterea unui semnal slab al senzorului
către unitatea de control a motorului. Cu accelerația
deschisă larg, presiunea din galerie este mai aproape
de presiunea atmosferică, ceea ce duce la transmiterea
unui semnal puternic spre unitatea de control a
motorului.
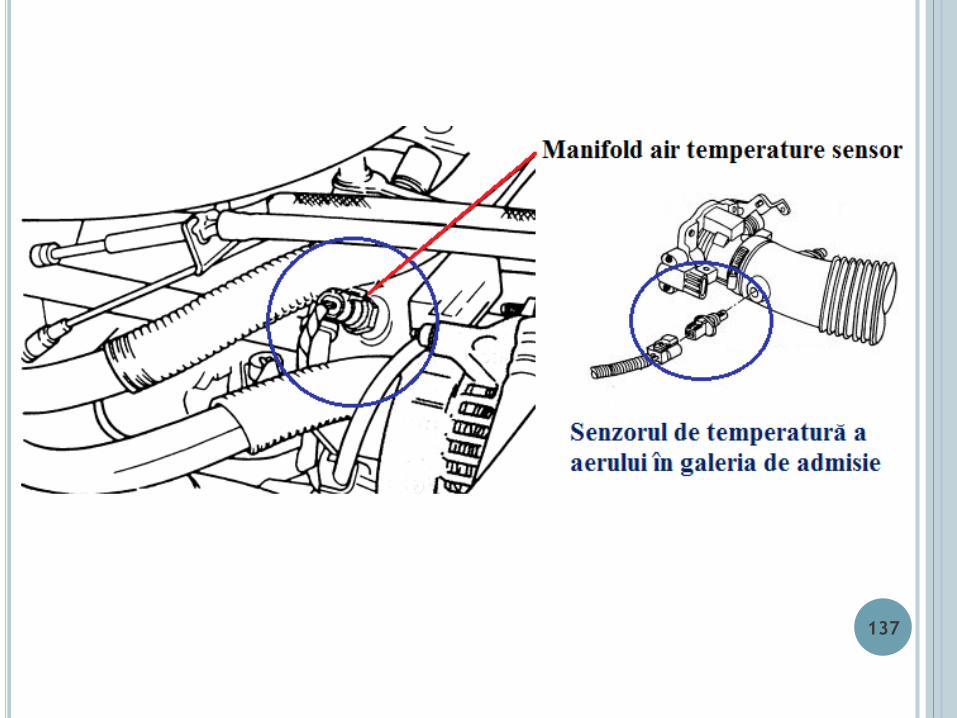
Senzorul de temperatură în galeria de
admisie
Acest senzor monitorizează temperatura
aerului care intră în motor. Modulul de
comandă al motorului are nevoie de aceste
informații pentru a estima densitatea aerului
astfel încât să poată echilibra amestecul de
aer și combustibil.
136
137
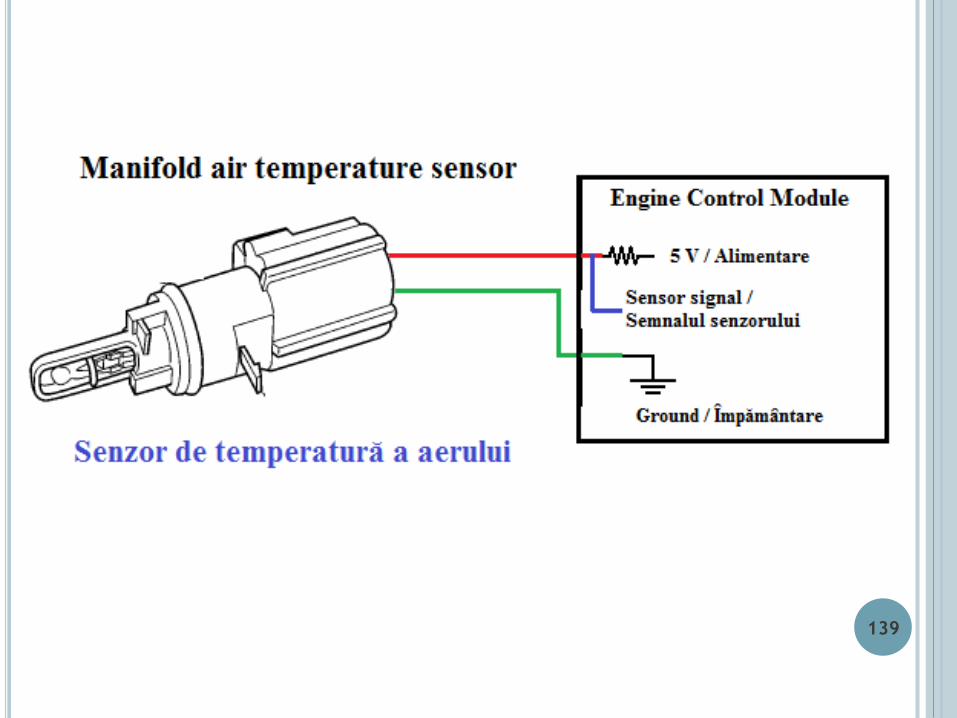
Aerul rece este mai dens decât aerul
cald, astfel încât aerul rece necesită mai
mult combustibil pentru a menține
același raport aer / combustibil. Modulul
de comandă al motorului modifică
raportul aer / combustibil prin variația
cantității combustibil injectat. Senzorul
de temperatură a aerului lucrează
împreună cu senzorul de debit de aer.
138
139
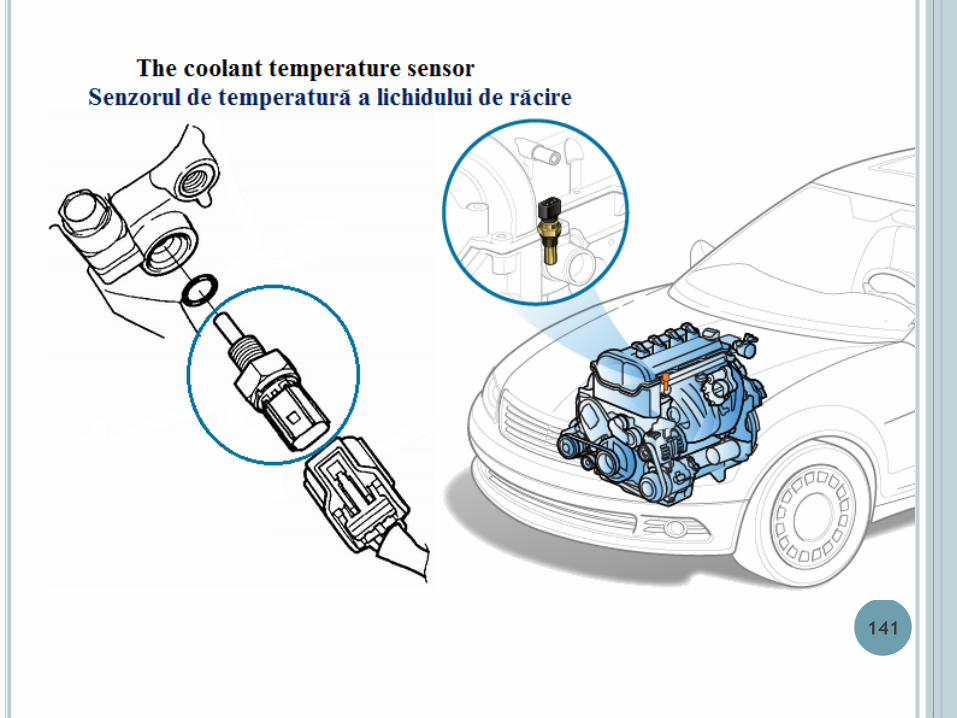
Senzorul de temperatură a lichidului de
răcire
Senzorul de temperatură a lichidului de
răcire al motorului măsoară temperatura
acestuia și transmite datele către unitatea
de control a motorului.
140
141
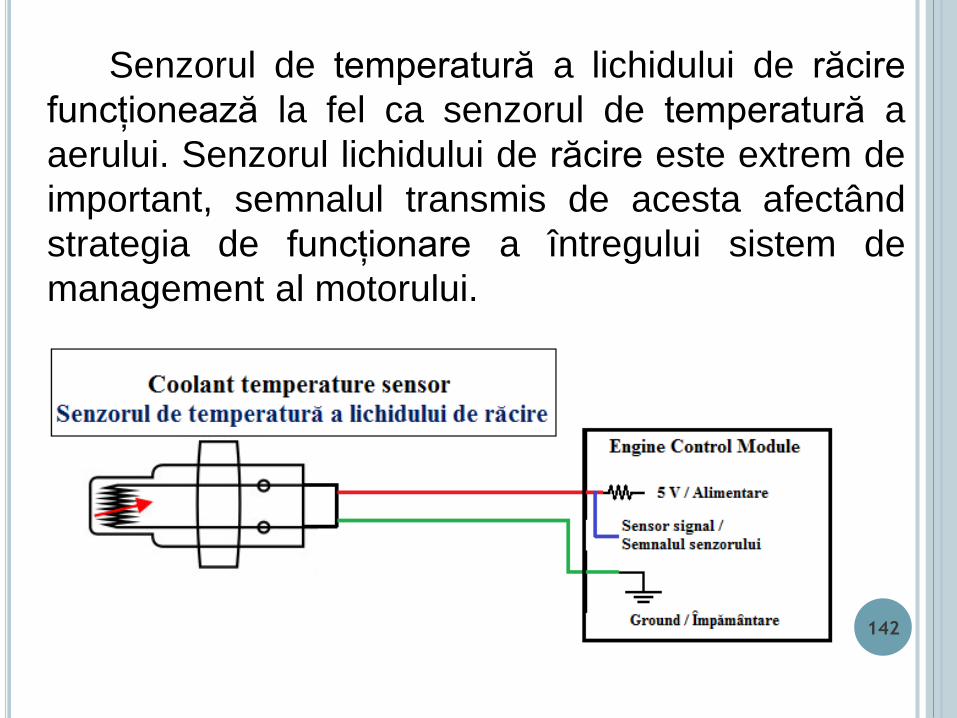
Senzorul de temperatură a lichidului de răcire
funcționează la fel ca senzorul de temperatură a
aerului. Senzorul lichidului de răcire este extrem de
important, semnalul transmis de acesta afectând
strategia de funcționare a întregului sistem de
management al motorului.
142
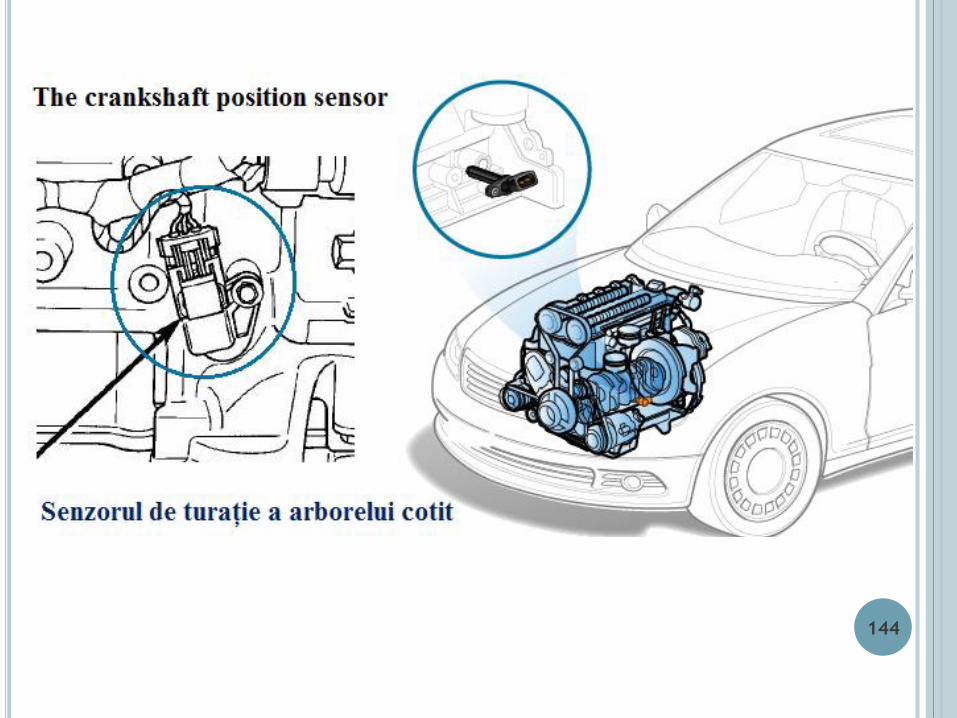
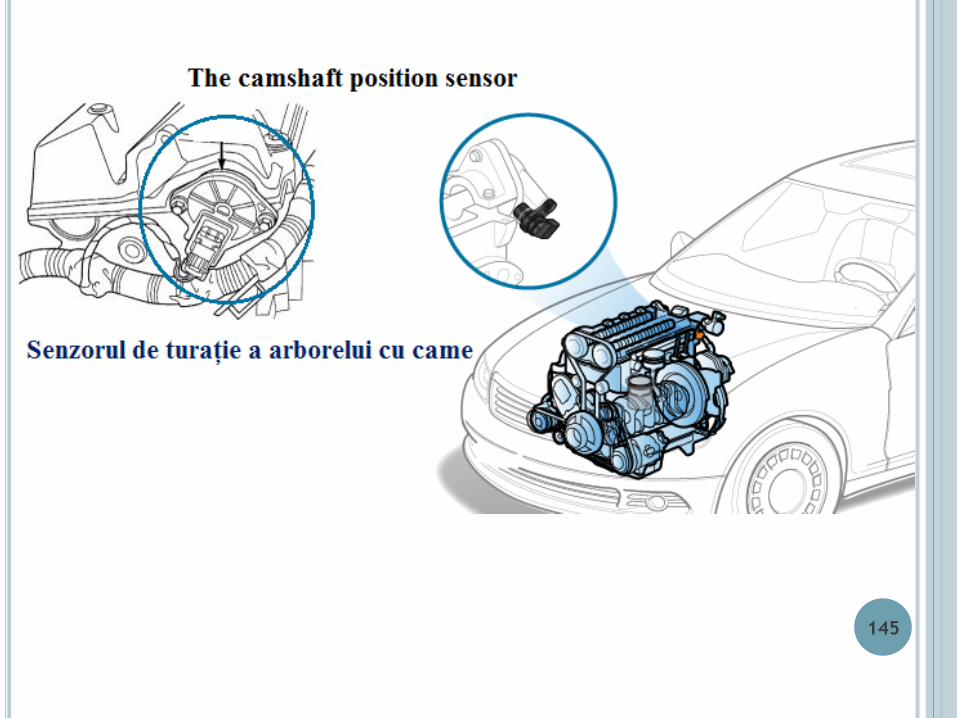
Senzorul de turație (poziție) a arborelui
cotit și senzorul de turație a arborelui
cu came
Senzorul de turație măsoară rotația
arborelui cotit sau a arborelui cu came și
transmite aceste informații la unitatea de
control a motorului.
143
144
145
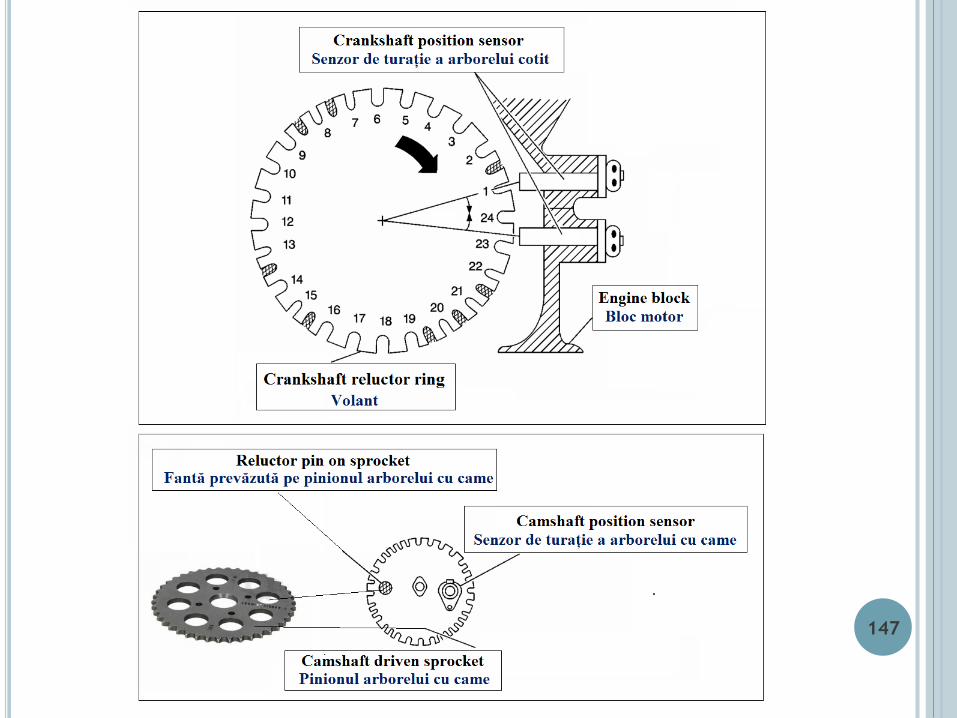
Pentru măsurarea turației și determinarea
poziției arborelui cotit sau a arborelui cu
came, la sistemele de management ale
motorului sunt utilizați senzori inductivi și
senzori cu efect Hall.
146
147
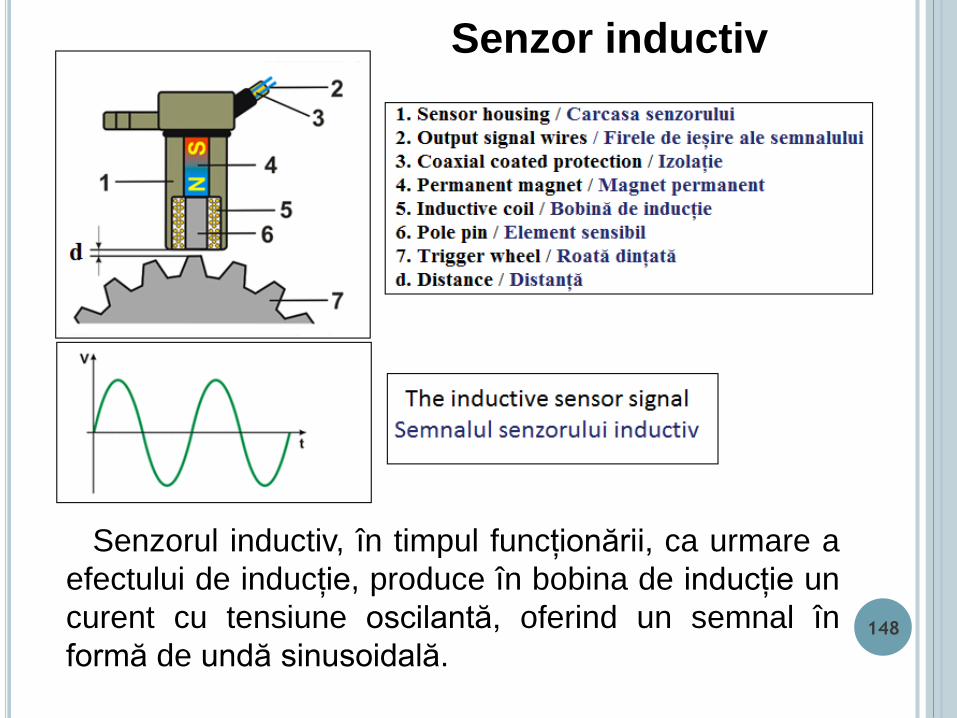
Senzorul inductiv, în timpul funcționării, ca urmare a
efectului de inducție, produce în bobina de inducție un
curent cu tensiune oscilantă, oferind un semnal în
formă de undă sinusoidală.
Senzor inductiv
148
În cazul în care dinții roții dințate trec la o
distanță (d) față de elementul sensibil al
senzorului, câmpul magnetic din jurul
bobinei se modifică. Ca rezultat al
modificărilor de câmp magnetic, în bobină
este indusă o tensiune proporțională cu
puterea și viteza de schimbare a câmpului
magnetic. Astfel se produce o oscilație
completă pentru fiecare dinte care trece
prin dreptul senzorului.
149
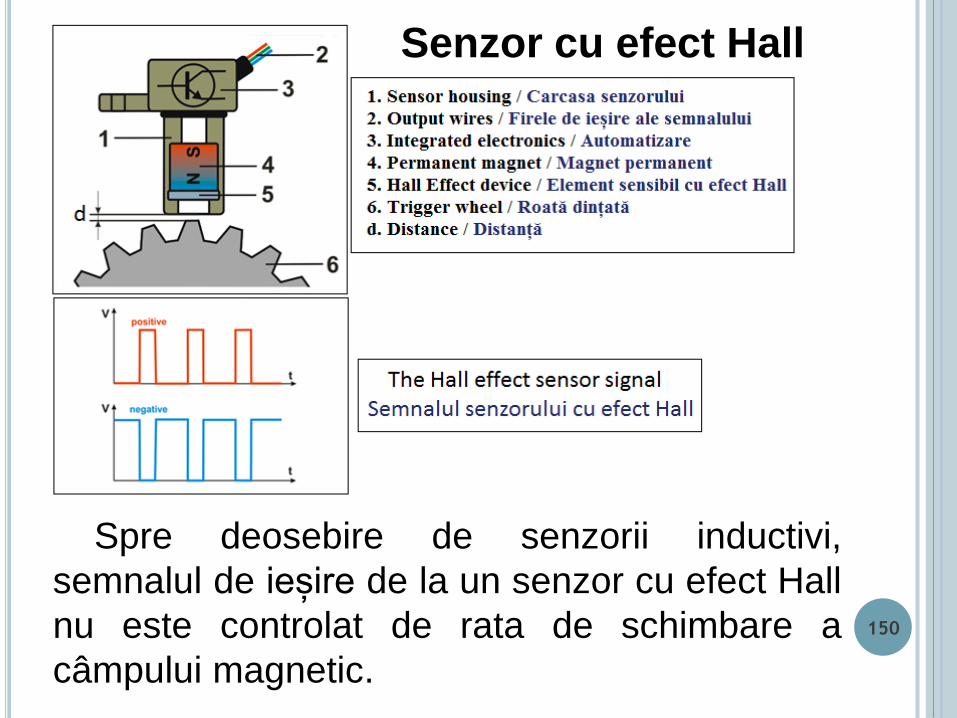
Senzor cu efect Hall
Spre deosebire de senzorii inductivi,
semnalul de ieșire de la un senzor cu efect Hall
nu este controlat de rata de schimbare a
câmpului magnetic.
150
Semnalul de ieșire este în formă de
impulsuri de undă (de formă pătrată).
Semnalul de ieșire al senzorului poate fi
pozitiv sau negativ cu tensiunea maximă de
până la 5V sau 12V, în funcție de tipul și de
cerințele sistemului integrat utilizat.
Amplitudinea semnalului de ieșire rămâne
constantă, doar frecvența crescând
proporțional cu mișcarea de rotație.
151
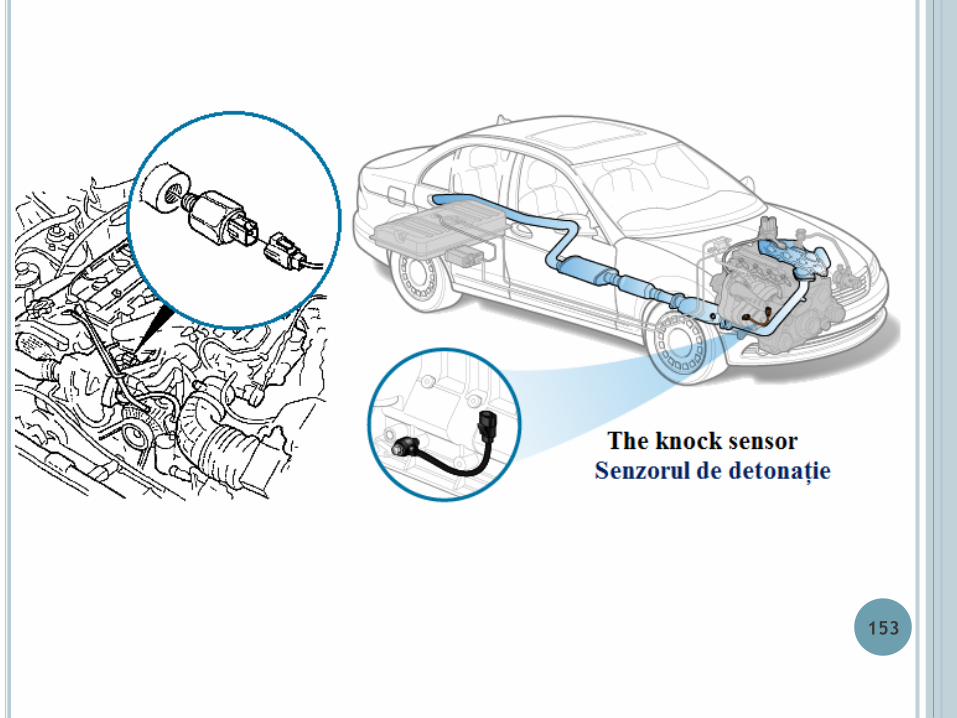
Senzorul de detonație
Senzorul de detonație este un
dispozitiv folosit pentru a împiedica
apariția fenomenului de detonație.
Detonația este o formă de ardere care
poate provocă daune importante la
motor. Acest lucru se întâmplă atunci
când căldura și presiunea în camera de
ardere a motorului este excesivă, făcând
ca amestecul aer / carburant să se
autoaprindă. 152
153
Senzorul de detonație este un senzor piezoelectric
folosit pentru a trimite semnale la unitatea de comandă a
motorului ECM dacă este detectată detonația, prevenind
astfel apariția acestui fenomen. Senzorul de detonație
este un microfon plasat în motor pentru a depista orice
zgomot neobișnuit. Vibrațiile detectate sunt preluate de
plăcile de rezonanță din interiorul senzorului de detonație.
Acest semnal este apoi transmis la elementul
piezoelectric cristalin al senzorului. După ce elementul
sensibil primește semnalul (unda de șoc), se va genera o
tensiune, care va fi trimisă spre unitatea de control
electronic a vehiculului. Ca urmare, unitatea de control
electronic a vehiculului va întârzia declanșarea scânteii în
camera de ardere, împiedicând detonația.154
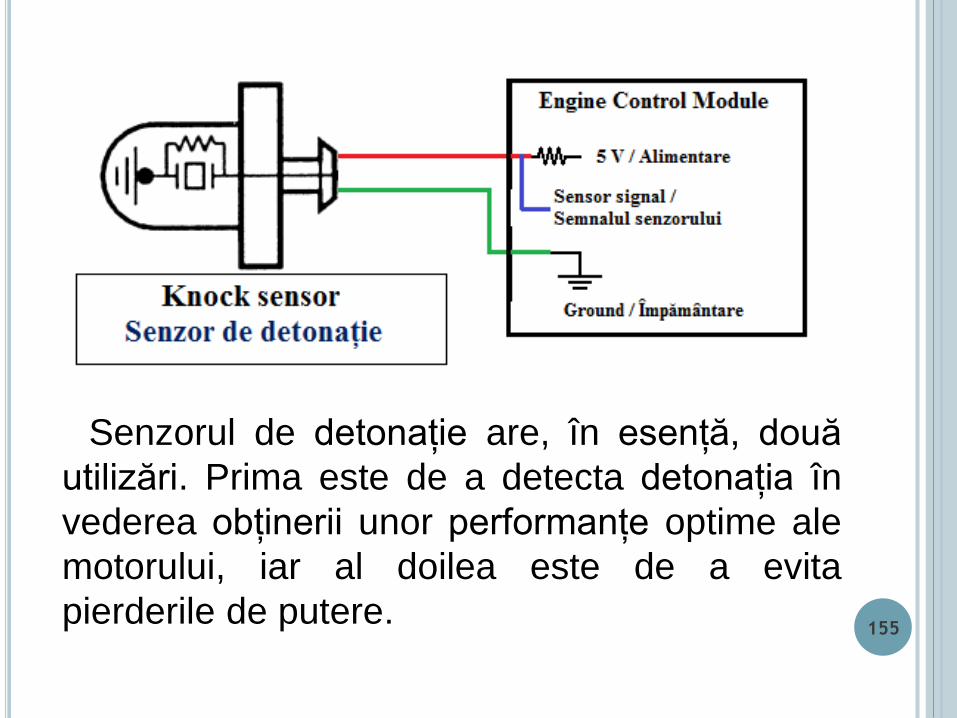
Senzorul de detonație are, în esență, două
utilizări. Prima este de a detecta detonația în
vederea obținerii unor performanțe optime ale
motorului, iar al doilea este de a evita
pierderile de putere.155

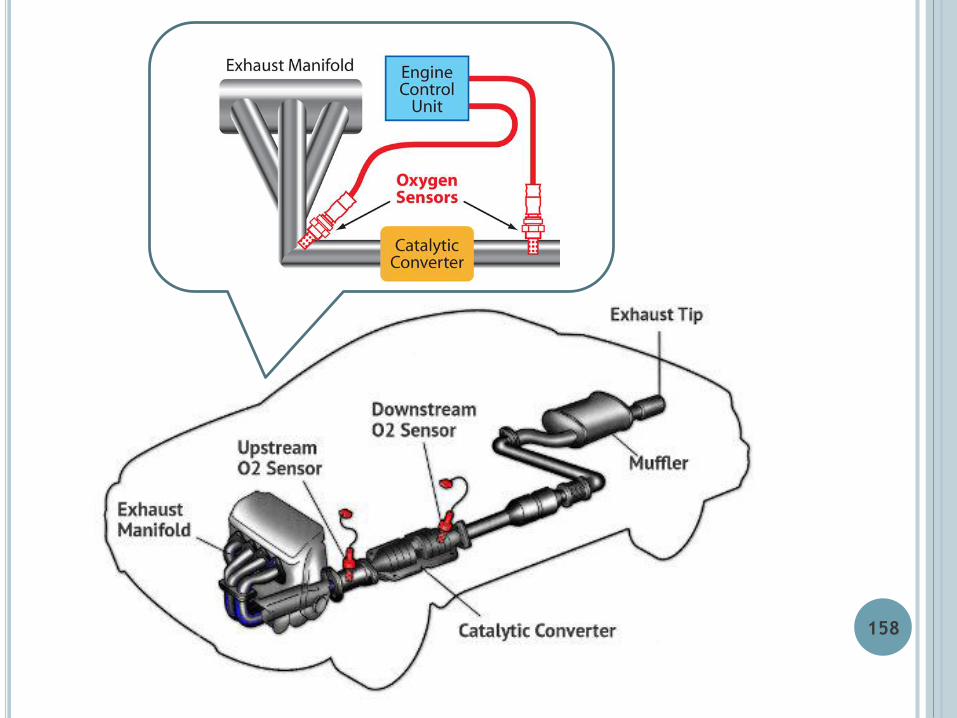
Sonda Lambda
Sonda Lambda (numită şi sonda sau senzorul de Oxigen) are
o importanţă deosebită relativ la reducerea emisiilor poluante de
pe automobile.
Produs al companiei Bosch, Sonda Lambda a fost utilizată
pentru prima oara alături de un catalizator pe un automobil Volvo
la sfârşitul anilor 1970. Dezvoltarea şi proiectarea sondei a fost
începută în timpul anilor 1960 sub supravegherea dr. Günter
Bauman, în cadrul companiei Bosch.
156
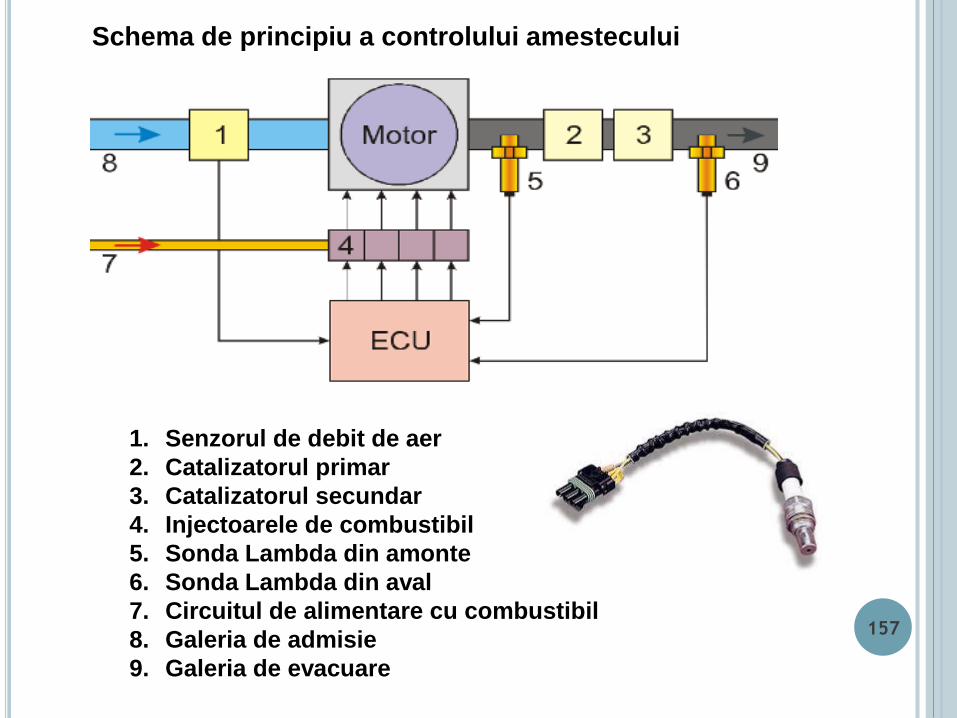
Schema de principiu a controlului amestecului
1. Senzorul de debit de aer
2. Catalizatorul primar
3. Catalizatorul secundar
4. Injectoarele de combustibil
5. Sonda Lambda din amonte
6. Sonda Lambda din aval
7. Circuitul de alimentare cu combustibil
8. Galeria de admisie
9. Galeria de evacuare
157
158
Rolul Sondei Lambda
Rolul Sondei Lambda din amonte este de a
informa ECU care este starea amestecului aer-
combustibil. Pe baza informaţiei primite de la
Sondă, calculatorul va ajusta injecţia de
combustibil astfel încât amestecul să se menţină în
jurul valorii stoichiometrice.
Sonda Lambda din aval are rolul de a monitoriza
activitatea catalizatorului, pentru a ne asigura că
acesta funcţionează în parametri normali. Cu alte
cuvinte rolul acesteia este de a diagnostica
funcţionarea catalizatorului.159

Principiul de funcţionare a Sondei Lambda
Acest senzor produce o tensiune electrică
fără să fie alimentat la o sursa de tensiune
exterioară. Tensiunea electrică generată de
sondă este produsă de diferenţa de
molecule de Oxigen din gazele de
eşapament şi aerul atmosferic.
160
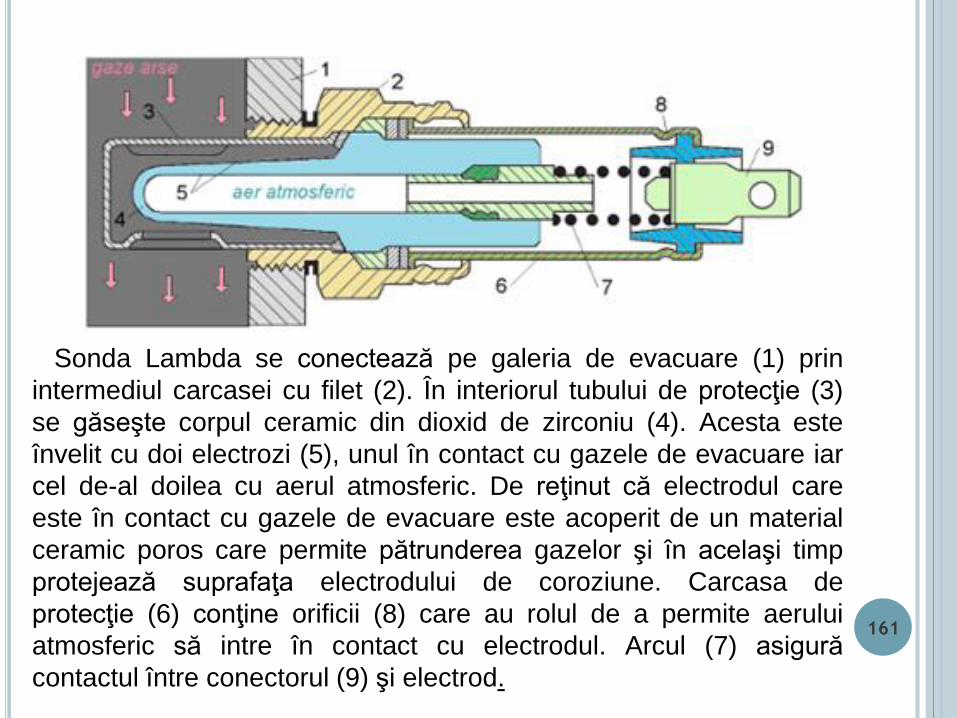
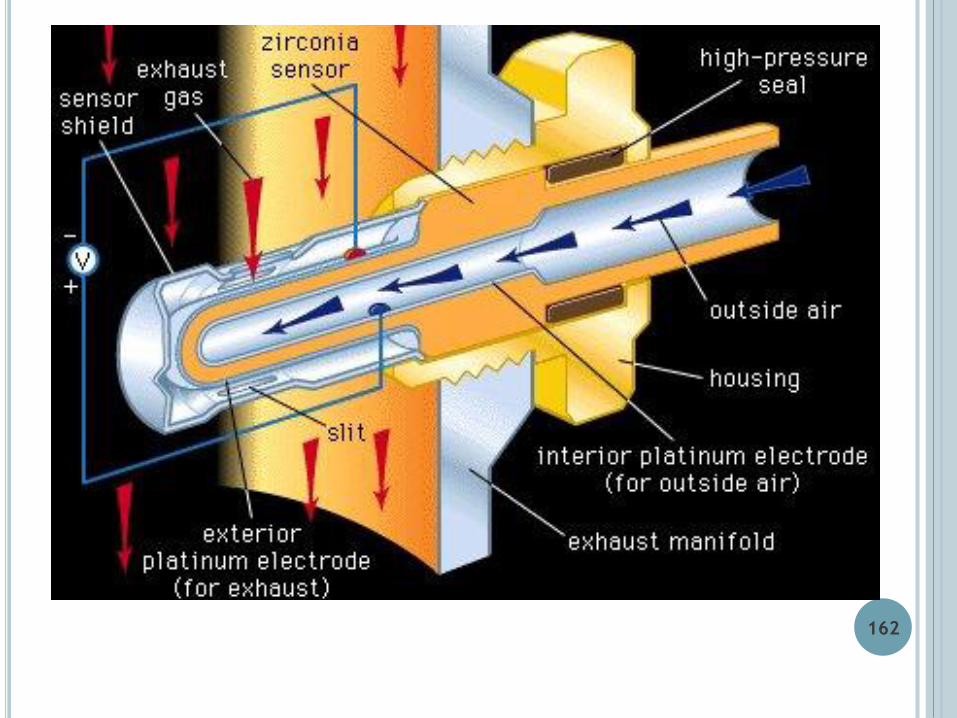
Sonda Lambda se conectează pe galeria de evacuare (1) prin
intermediul carcasei cu filet (2). În interiorul tubului de protecţie (3)
se găseşte corpul ceramic din dioxid de zirconiu (4). Acesta este
învelit cu doi electrozi (5), unul în contact cu gazele de evacuare iar
cel de-al doilea cu aerul atmosferic. De reţinut că electrodul care
este în contact cu gazele de evacuare este acoperit de un material
ceramic poros care permite pătrunderea gazelor şi în acelaşi timp
protejează suprafaţa electrodului de coroziune. Carcasa de
protecţie (6) conţine orificii (8) care au rolul de a permite aerului
atmosferic să intre în contact cu electrodul. Arcul (7) asigură
contactul între conectorul (9) şi electrod.
161
162
În funcţie de cantitatea de oxigen din evacuare Sonda
Lambda generează o tensiune care semnalează
calculatorului de injecţie dacă amestecul este sărac sau
bogat.
Dacă amestecul este bogat (λ < 1) atunci în gazele de
eşapament se află o cantitate foarte mică de Oxigen. În
acest caz Sonda Lambda va genera o tensiune de
aproximativ 0.8 - 0.9 V.
În cazul în care amestecul este sărac (λ > 1) Oxigenul se
va găsi în cantitate mare în gazele de evacuare, diferenţa
de molecule de oxigen fiind mică și tensiunea generată va fi
de ordinul 0.1 - 0.2 V.
Cu cât diferenţa dintre moleculele de Oxigen din gazele
de eşapament şi aerul atmosferic este mai mare cu atât
tensiunea generată de Sonda Lambda este mai mare.163
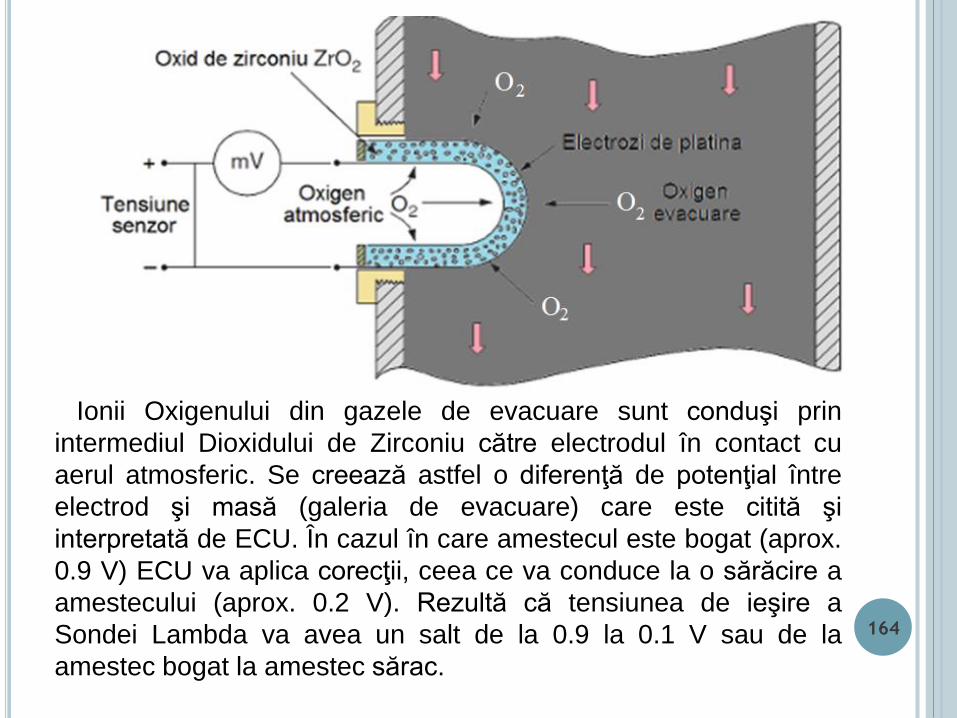
Ionii Oxigenului din gazele de evacuare sunt conduşi prin
intermediul Dioxidului de Zirconiu către electrodul în contact cu
aerul atmosferic. Se creează astfel o diferenţă de potenţial între
electrod şi masă (galeria de evacuare) care este citită şi
interpretată de ECU. În cazul în care amestecul este bogat (aprox.
0.9 V) ECU va aplica corecţii, ceea ce va conduce la o sărăcire a
amestecului (aprox. 0.2 V). Rezultă că tensiunea de ieşire a
Sondei Lambda va avea un salt de la 0.9 la 0.1 V sau de la
amestec bogat la amestec sărac.
164
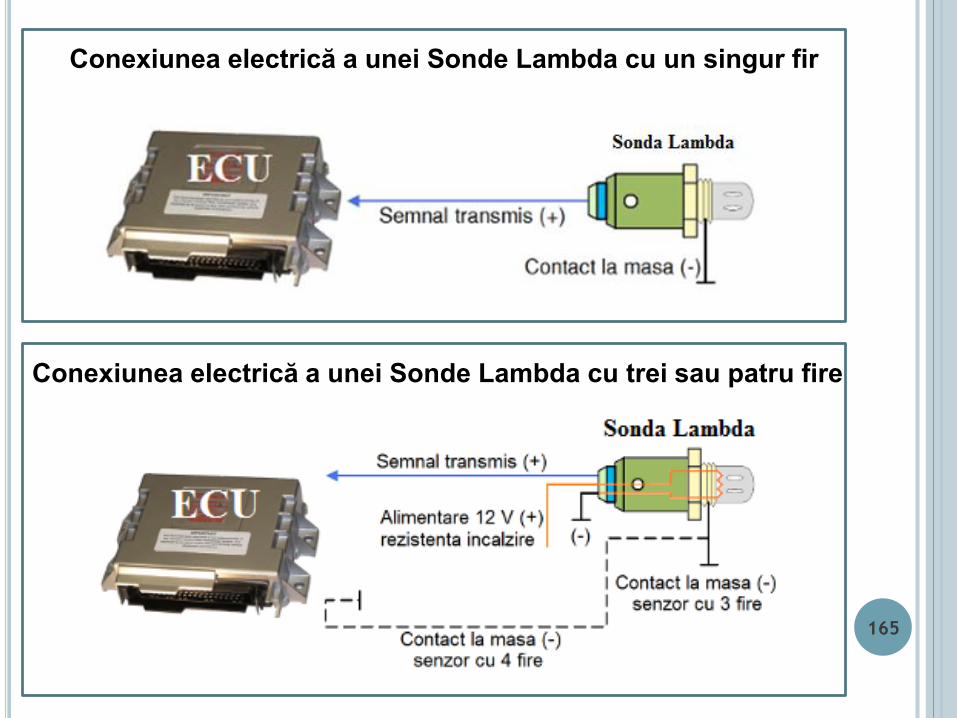
Conexiunea electrică a unei Sonde Lambda cu un singur fir
Conexiunea electrică a unei Sonde Lambda cu trei sau patru fire
165

SENZORII TRANSMISIEI
166
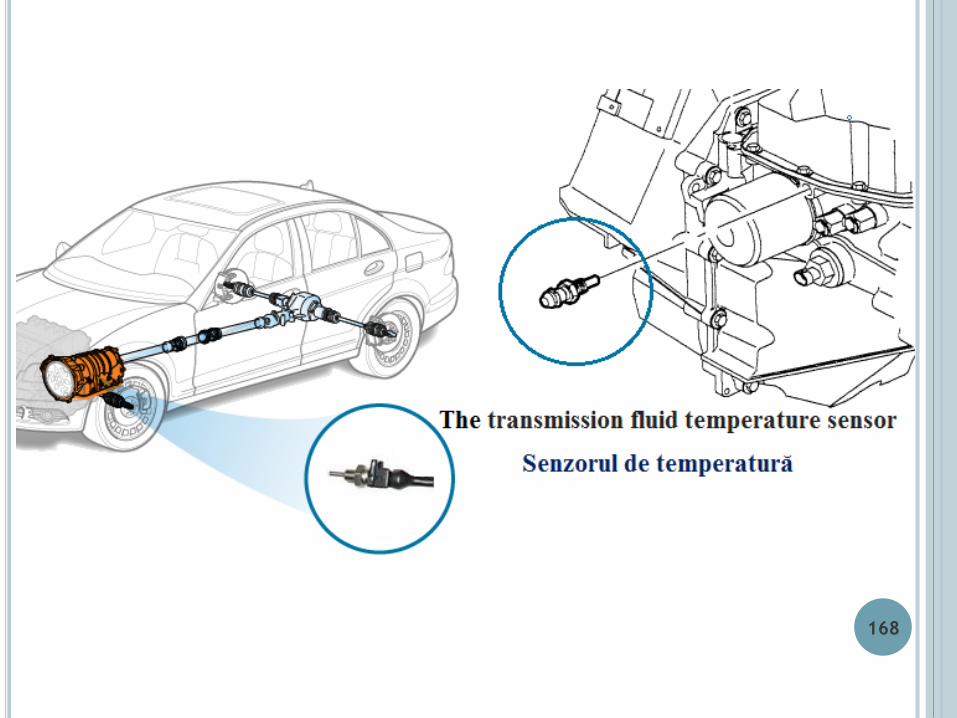
Senzorul de temperatura a fluidului
din sistemul de transmisie
Senzorul de temperatura a fluidului din
sistemul de transmisie este unul dintre
senzorii care trimite informații spre
modulul de comandă al transmisiei (TCM),
fiind în contact direct cu uleiul cutiei de
viteze. Modulul de comandă al transmisiei
folosește acest senzor pentru a monitoriza
temperatura lichidului de transmisie.
167
168
Modulul de comandă al transmisiei
utilizează semnalul primit de la senzorul de
temperatură pentru a controla funcționarea
transmisiei.
Atunci când temperatura fluidului este
mică, modulul de comandă al transmisiei va
întârzia funcționarea convertizorului de cuplu
(dispozitivul de cuplare al motorului termic cu
cutia de viteze automată) până lichidul
ajunge la o anumită temperatură.169
Dacă temperatura lichidului atinge un
prag prestabilit, modulul de control al
transmisiei va trimite un semnal de
eroare pentru a informa conducătorul
auto.
Defectarea senzorului de temperatură
va afecta funcționarea convertizorului de
cuplu și presiunea fluidului de transmisie.
170
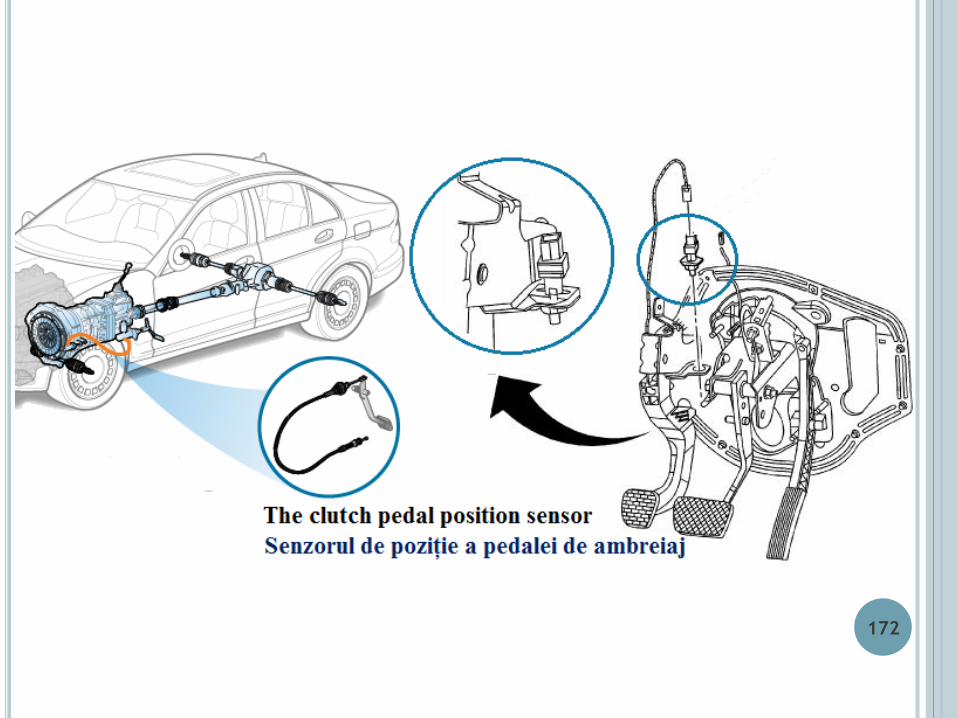
Senzorul de poziție a pedalei de ambreiaj
Senzorii de poziție a pedalei de
ambreiaj sunt utilizați pentru a
împiedica pornirea autoturismului
atunci când schimbătorul nu este în
poziție neutră și pedala de ambreiaj nu
este apăsată. În acest caz demarorul
este împiedicat să funcționeze. Acest
senzor este situat sub pedala de
ambreiaj.171
172
173
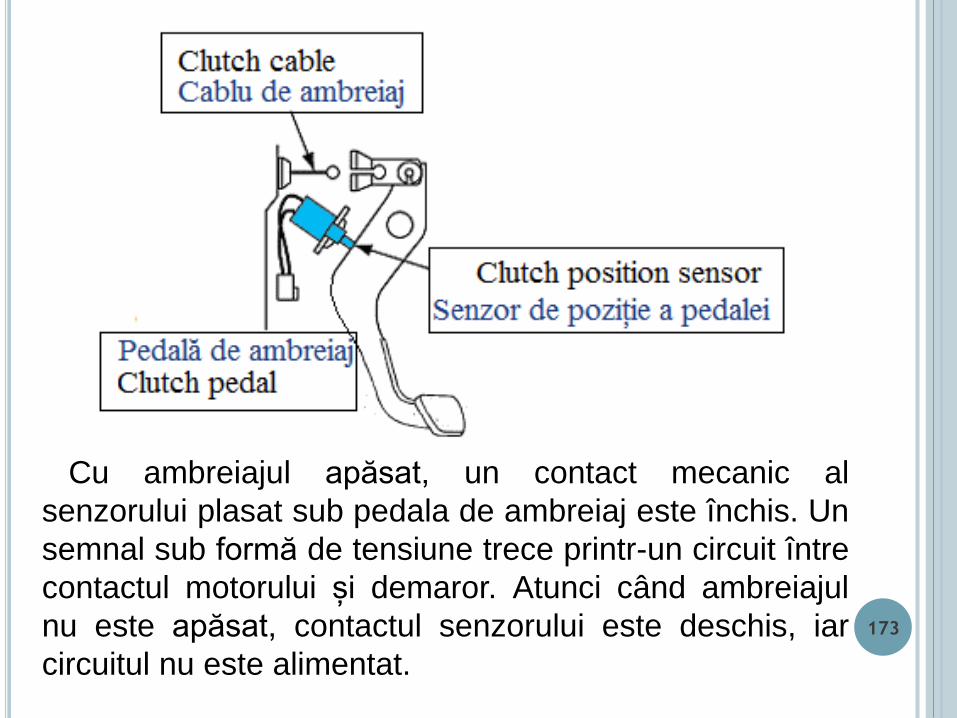
Cu ambreiajul apăsat, un contact mecanic al
senzorului plasat sub pedala de ambreiaj este închis. Un
semnal sub formă de tensiune trece printr-un circuit între
contactul motorului și demaror. Atunci când ambreiajul
nu este apăsat, contactul senzorului este deschis, iar
circuitul nu este alimentat.
Senzorul pentru detectarea poziției de
neutru
Pentru transmisii manuale, acest
senzor este folosit pentru a determina
poziția de neutru în vederea pornirii și
opririi automate a motorului. Sistemul
de oprire/pornire automată oprește
motorul atunci când vehiculul se
oprește. Motorul va reporni odată ce
schimbătorul de viteze este în punctul
mort și se ridică piciorul de pe pedala
de ambreiaj.174
La transmisia automată se utilizează
senzorul de detecție a poziției de neutru
pentru a opri pornirea în cazul în care
selecția de viteze nu este pe modul
neutru.
175
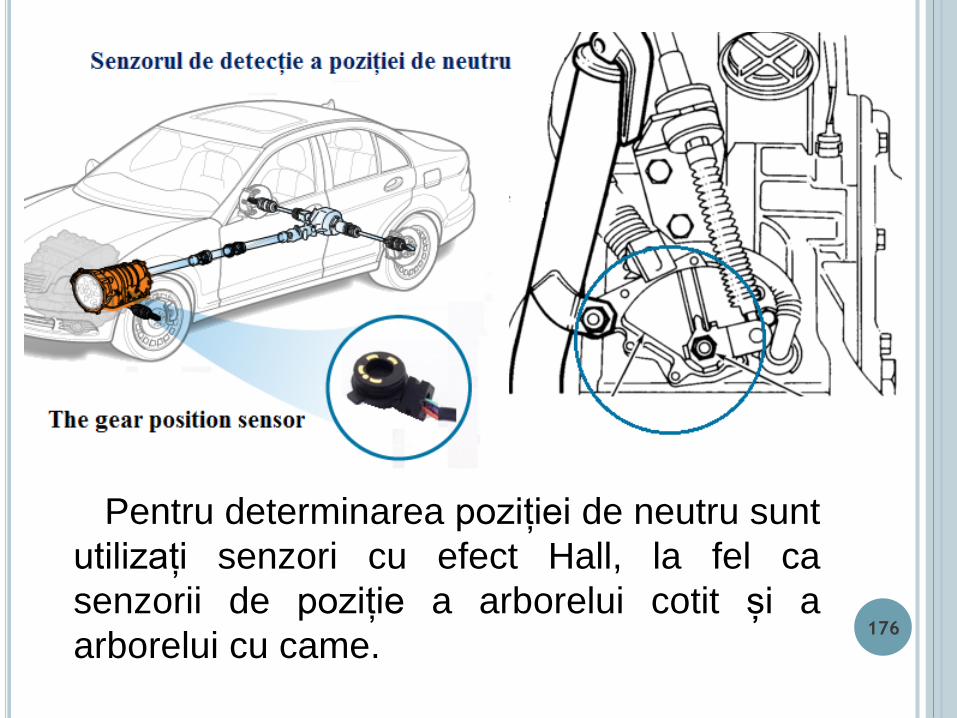
176
Pentru determinarea poziției de neutru sunt
utilizați senzori cu efect Hall, la fel ca
senzorii de poziție a arborelui cotit și a
arborelui cu came.
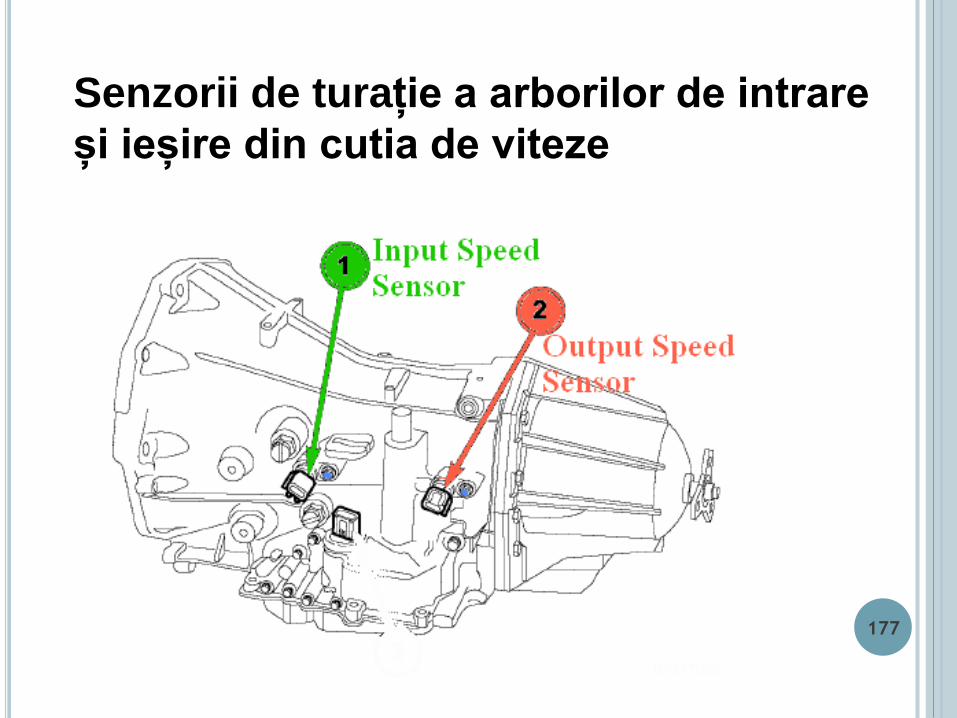
Senzorii de turație a arborilor de intrare
și ieșire din cutia de viteze
177
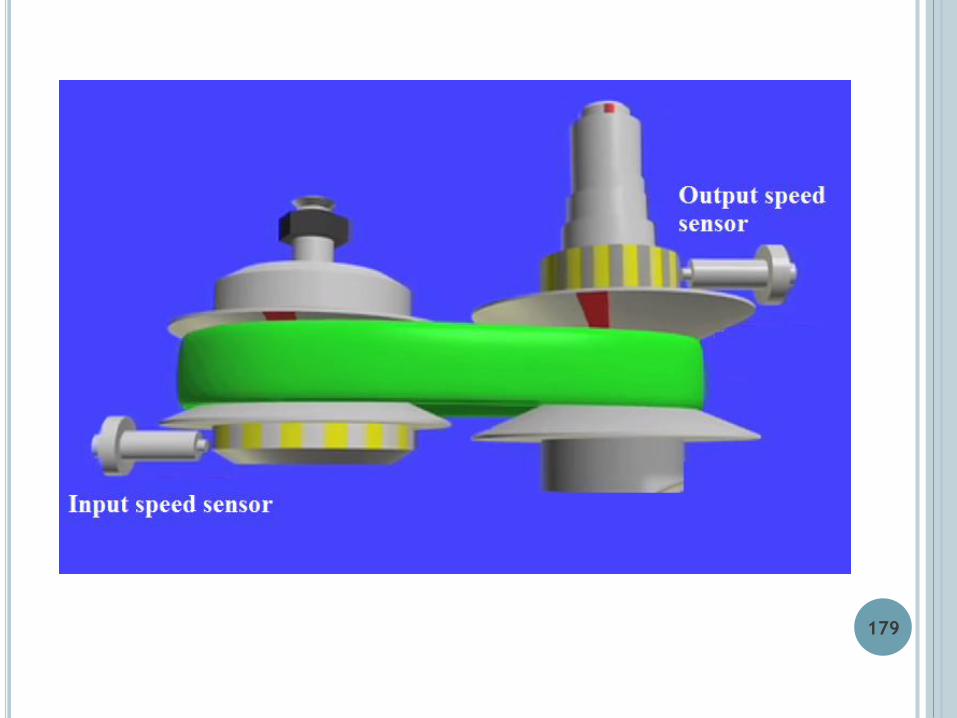
Senzorii de turație a arborilor de intrare
și ieșire oferă informații cu privire la viteza
de rotație a arborilor în cutia de viteze. În
funcție de aceasta senzorul generează și
trimite un semnal sub formă de tensiune
(curent alternativ) către modulul de
comandă al transmisiei (TCM).
178
179

SENZORII SISTEMELOR DE SIGURANȚĂ
180
Senzorul de viteză (turație)
Senzorii de viteză sunt utilizați pentru
funcționarea sistemul anti-blocare la
frânare (ABS), monitorizând turația roții și
transmițând semnale către modulul de
gestiune ABS. Sistemul ABS utilizează
informațiile primite de la senzor pentru a
determina când o roată este blocată, în
vederea deblocării acesteia pentru a
menține stabilitatea autovehiculului.181
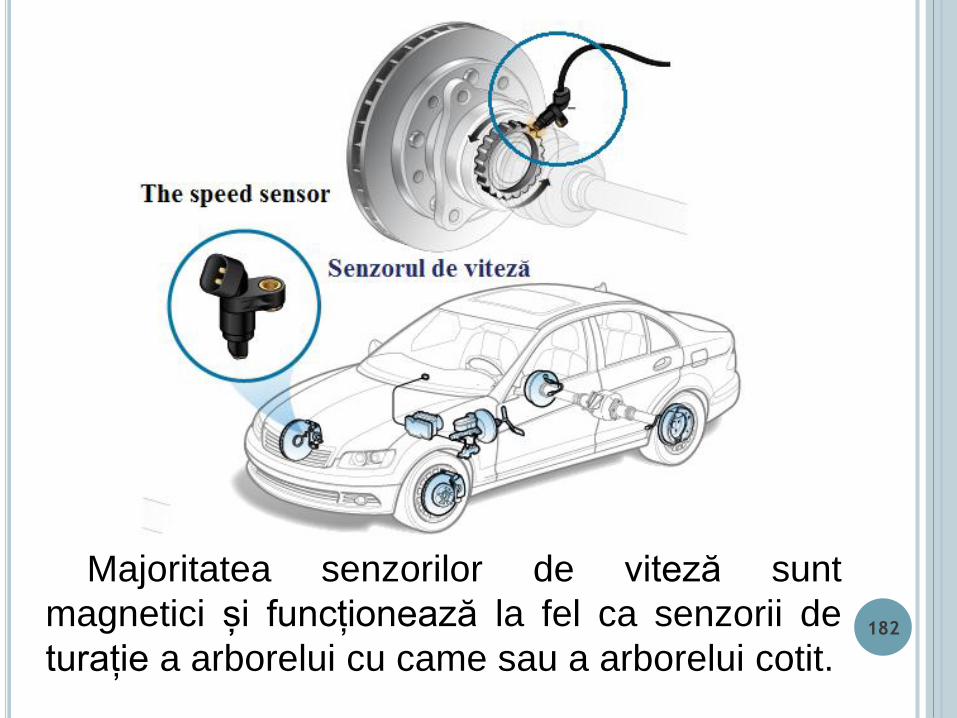
Majoritatea senzorilor de viteză sunt
magnetici și funcționează la fel ca senzorii de
turație a arborelui cu came sau a arborelui cotit.182
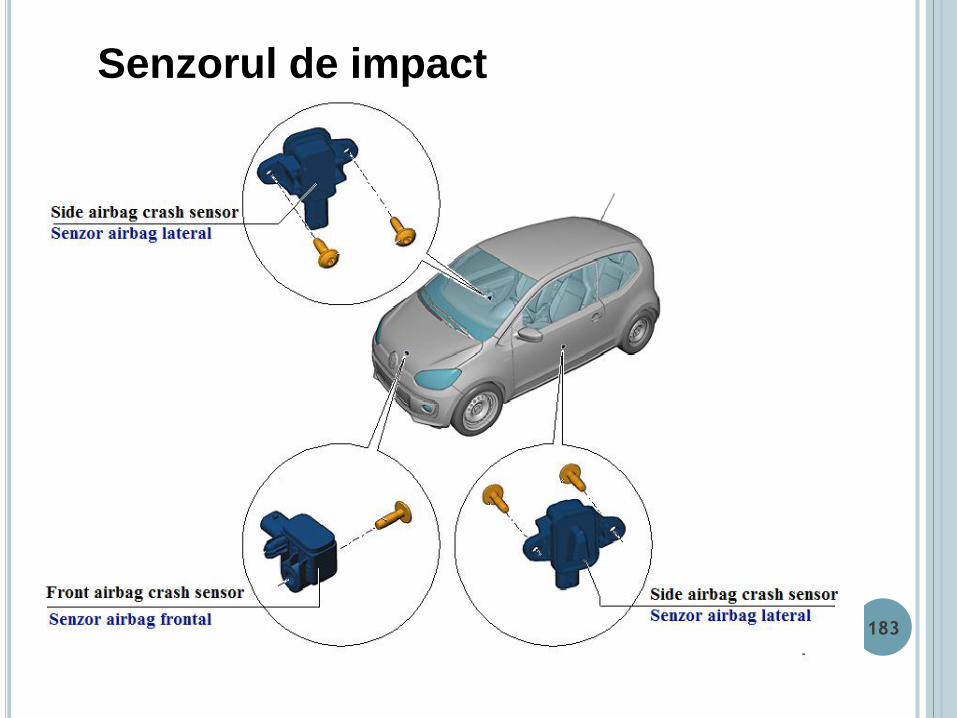
Senzorul de impact
183
Senzorii de impact colecteză datele
necesare în vederea luării unei decizii
cu privire la declansarea airbag-urilor la
accidentele frontale și laterale. Unele
autovehicule sunt echipate cu un sistem
de detectare a debutului răsturnării.
184
Senzorii de impact frontal se află în partea
din față a vehiculului în apropierea motorului, în
compartimentul pentru pasageri, sau, uneori, în
unitatea de control electronic (ECU).
Senzori de impact lateral de impact se află în
uși, ECU, sau între ușile din față și cele din
spate.
Senzorii de detecție la răsturnare se află
poziționați în ECU sau în apropierea centrului
de masă al vehiculului.
La frânarea bruscă sau de urgență nu se
poate provoca declanșarea airbag-urilor.
185
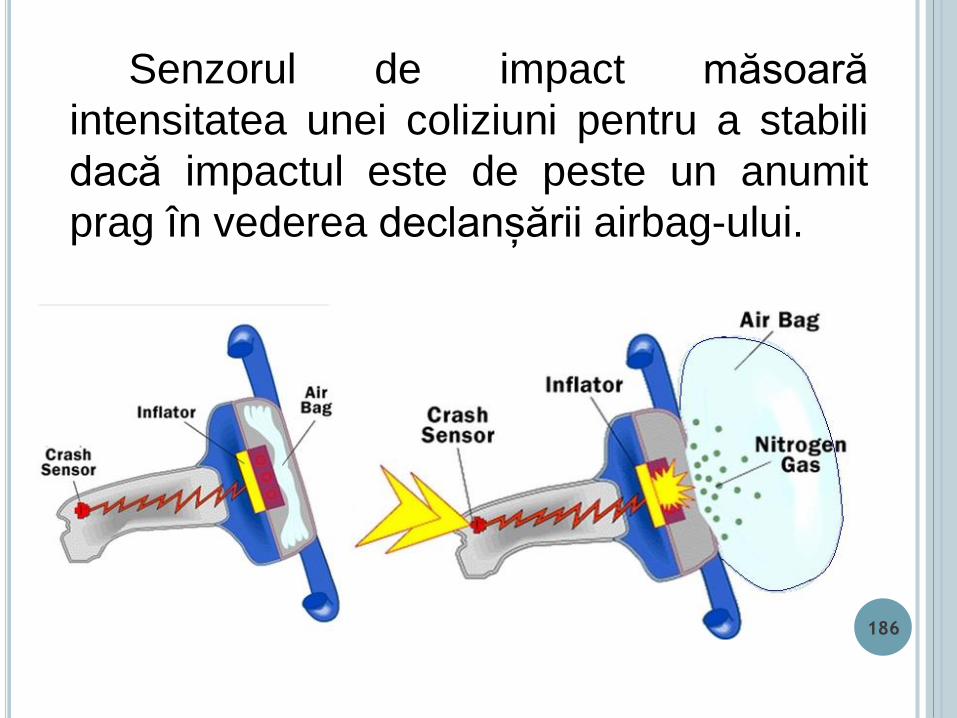
Senzorul de impact măsoară
intensitatea unei coliziuni pentru a stabili
dacă impactul este de peste un anumit
prag în vederea declanșării airbag-ului.
186
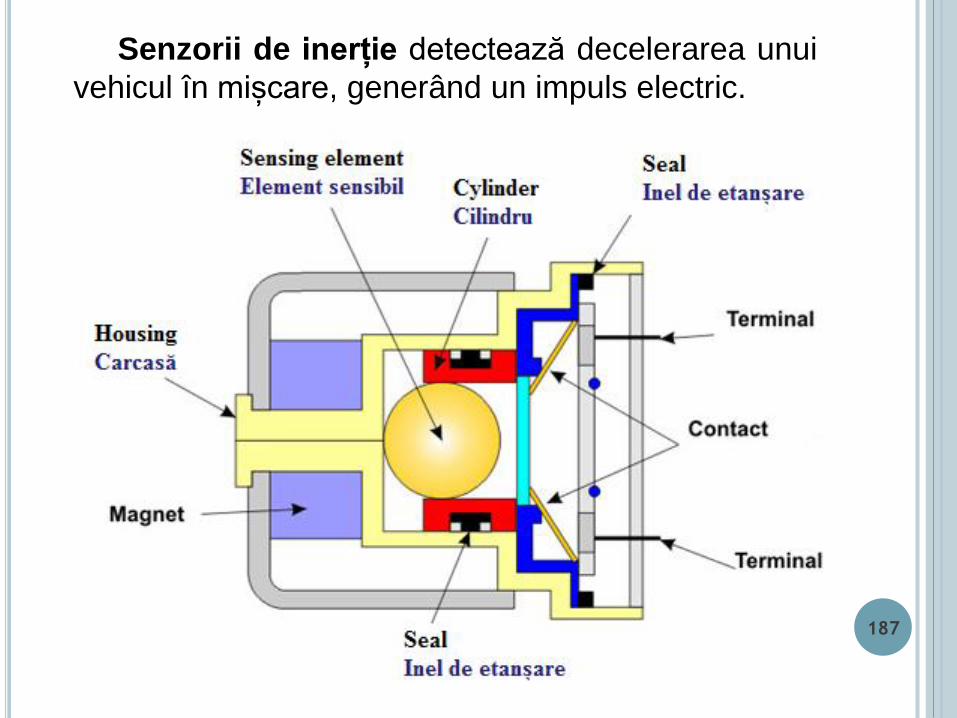
Senzorii de inerție detectează decelerarea unui
vehicul în mișcare, generând un impuls electric.
187
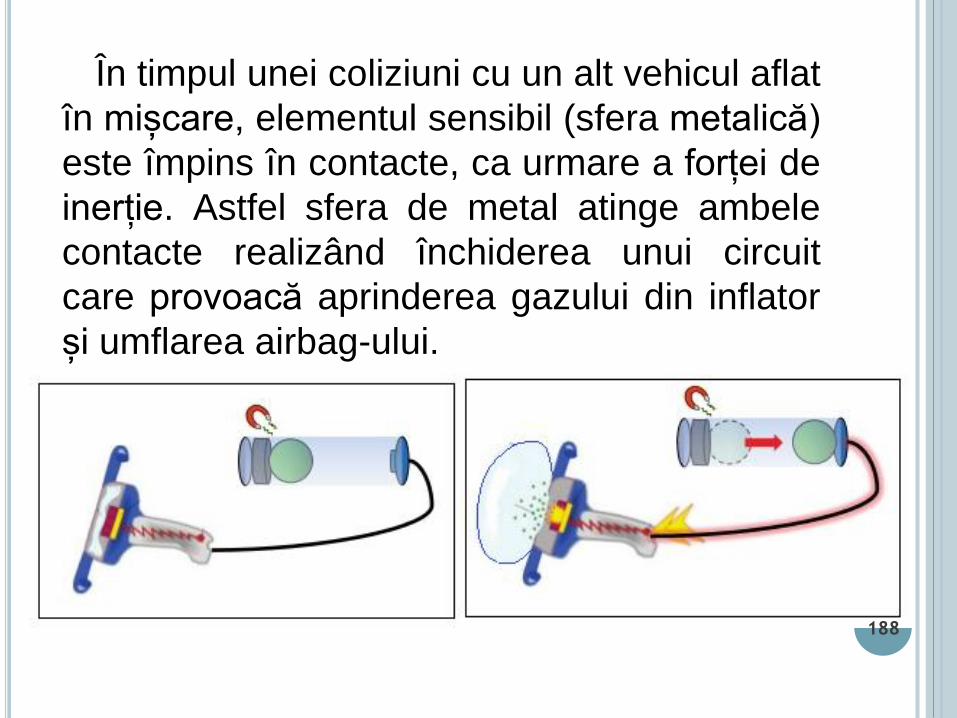
În timpul unei coliziuni cu un alt vehicul aflat
în mișcare, elementul sensibil (sfera metalică)
este împins în contacte, ca urmare a forței de
inerție. Astfel sfera de metal atinge ambele
contacte realizând închiderea unui circuit
care provoacă aprinderea gazului din inflator
și umflarea airbag-ului.
188
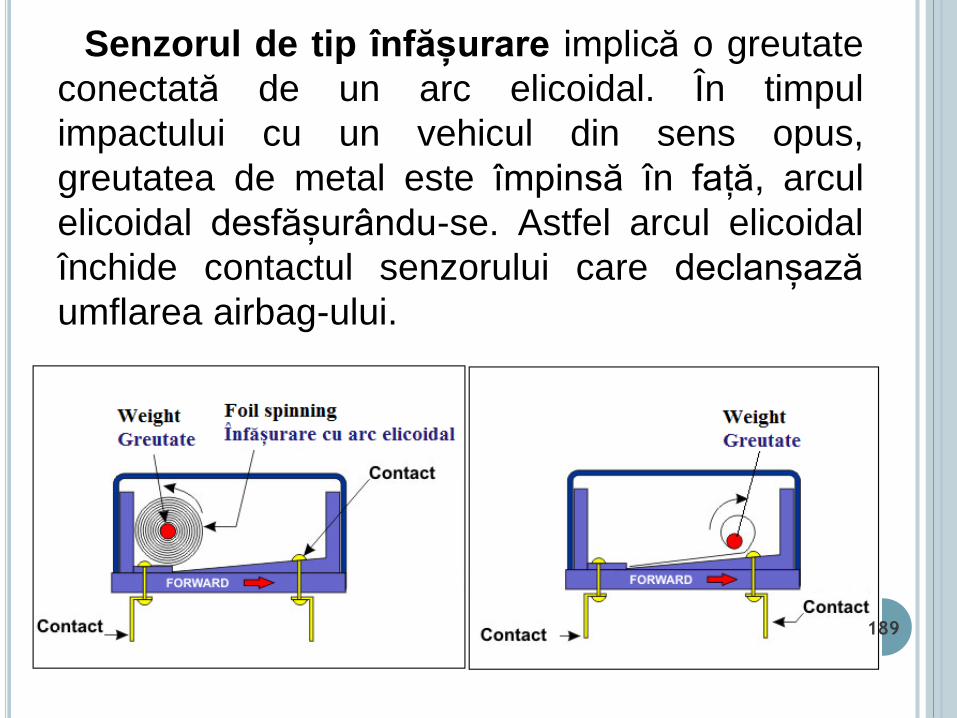
Senzorul de tip înfășurare implică o greutate
conectată de un arc elicoidal. În timpul
impactului cu un vehicul din sens opus,
greutatea de metal este împinsă în față, arcul
elicoidal desfășurându-se. Astfel arcul elicoidal
închide contactul senzorului care declanșază
umflarea airbag-ului.
189

Senzorii de detecție
a răsturnării
190
Pentru detectarea unei răsturnări este
esențial să se combine semnalul unui
giroscop cu cel a unui accelerometru
pentru forțe gravitaționale mici. Prin
intermediul ambelor intrări ale senzorilor,
algoritmul sistemului determină unghiul
dintre axa Z a mașinii și verticală, precum
și variația unghiulară a vehiculului în
fiecare moment. Astfel, sistemul de
detecție a răsturnării determină momentul
de declanșare a airbag-ului.191
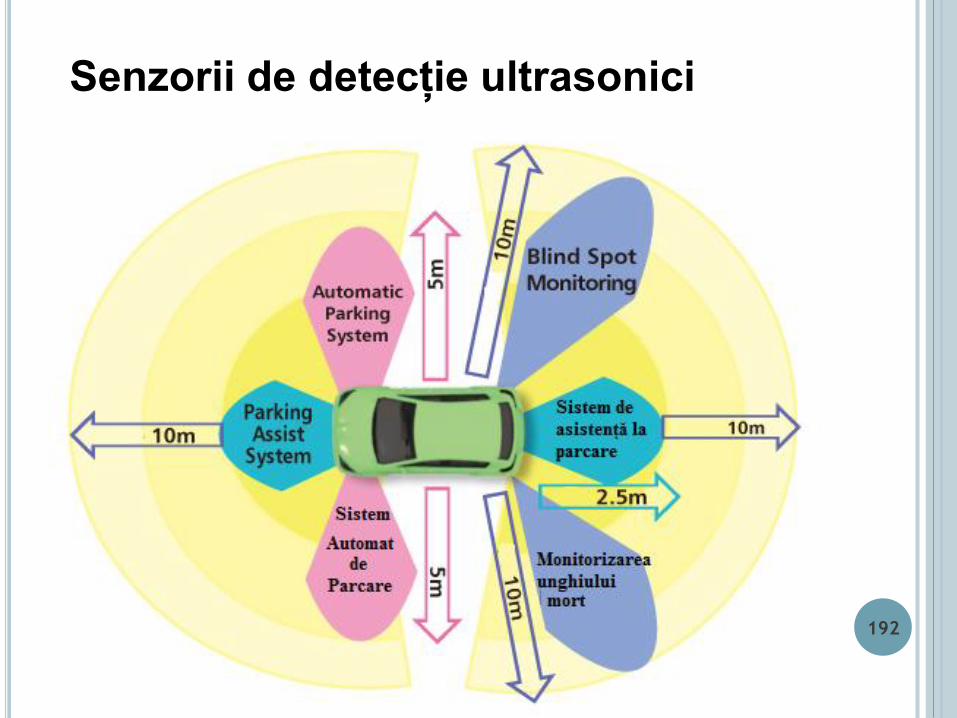
Senzorii de detecție ultrasonici
192

Sistem de asistență
la parcare
193

194
Sistem de asistență
la parcare automat
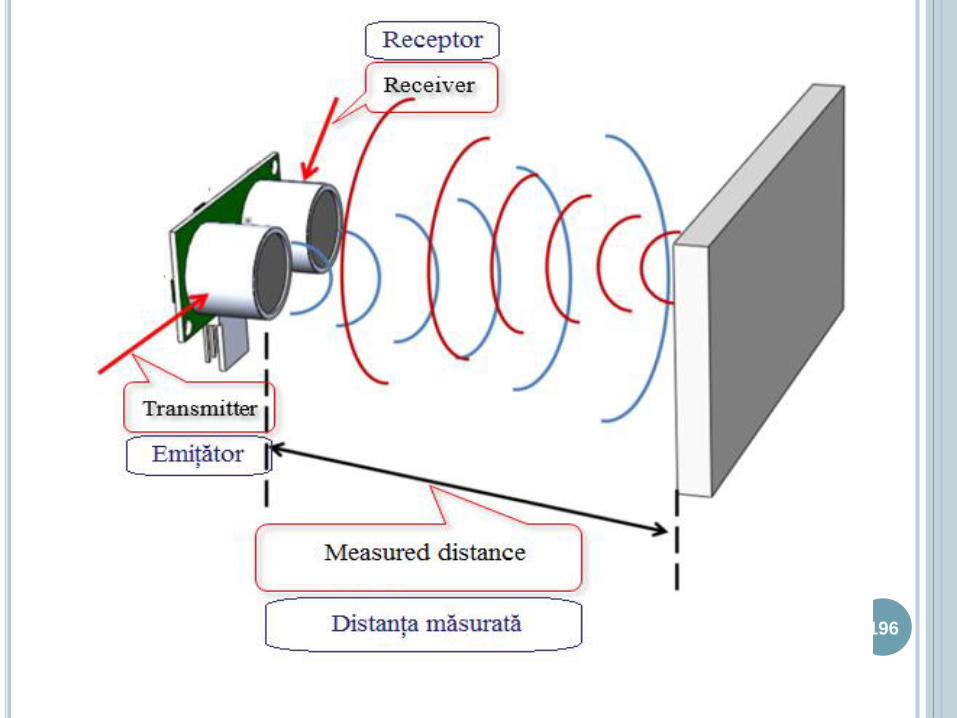
Senzorul ultrasonic este un dispozitiv
care poate măsura distanța până la un
obiect, cu ajutorul ultrasunetelor. Distanța
se măsoară prin emiterea și apoi recepția
unui semnal ultrasonic la o anumită
frecvență Prin măsurarea timpul scurs
între emiterea și recepția undelor sonore
generate se calculează distanța dintre
senzor și obiectul detectat.
195
196
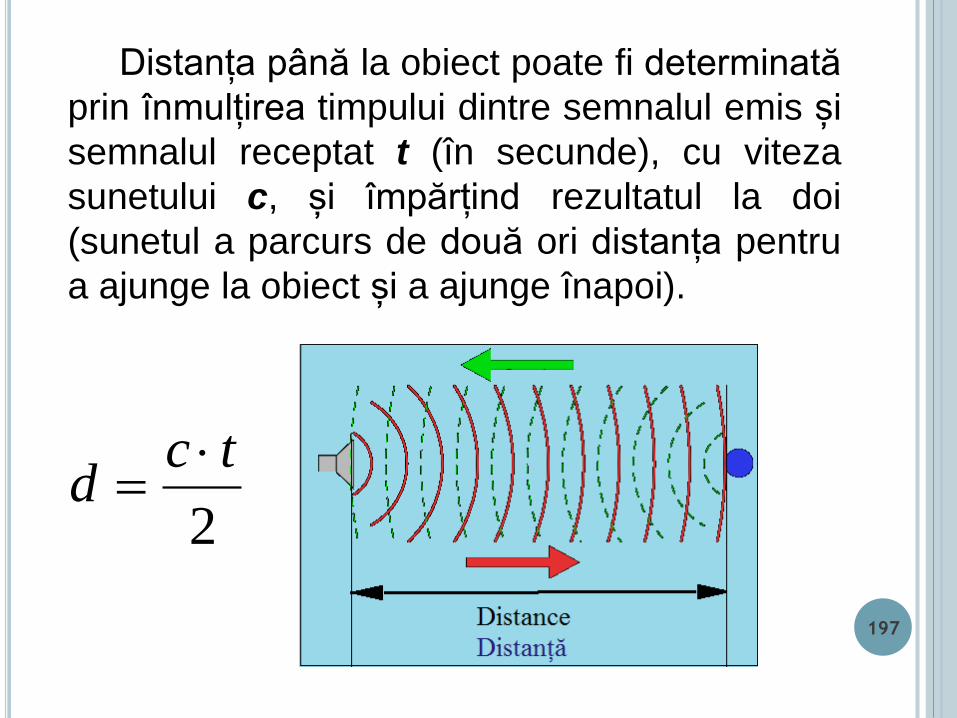
Distanța până la obiect poate fi determinată
prin înmulțirea timpului dintre semnalul emis și
semnalul receptat t (în secunde), cu viteza
sunetului c, și împărțind rezultatul la doi
(sunetul a parcurs de două ori distanța pentru
a ajunge la obiect și a ajunge înapoi).
2
tcd
197
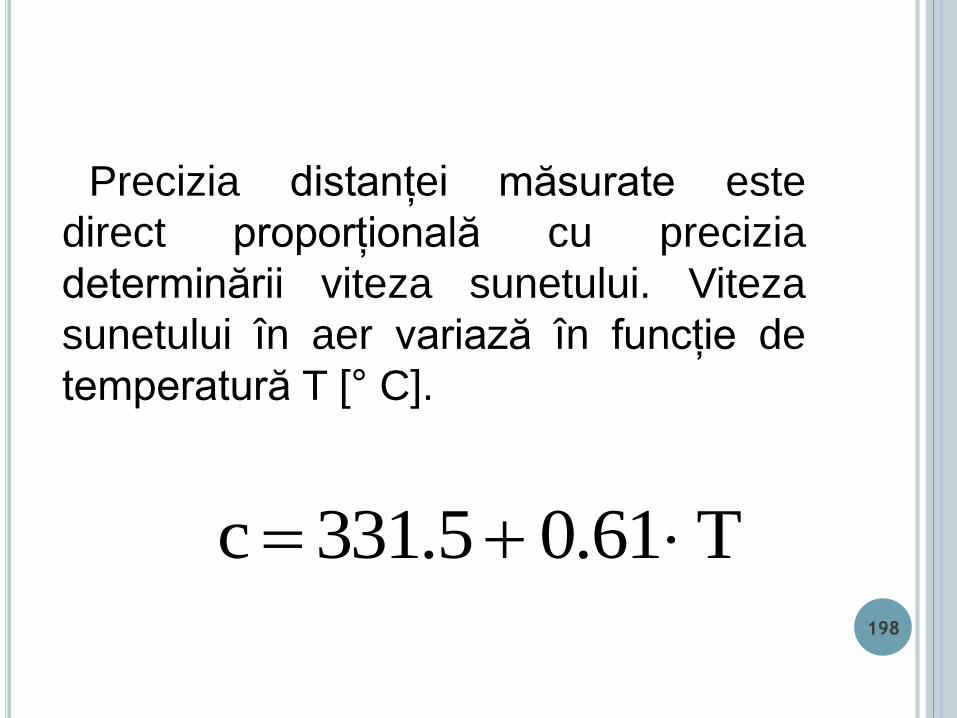
Precizia distanței măsurate este
direct proporțională cu precizia
determinării viteza sunetului. Viteza
sunetului în aer variază în funcție de
temperatură T [° C].
T61.05.331c 198

199
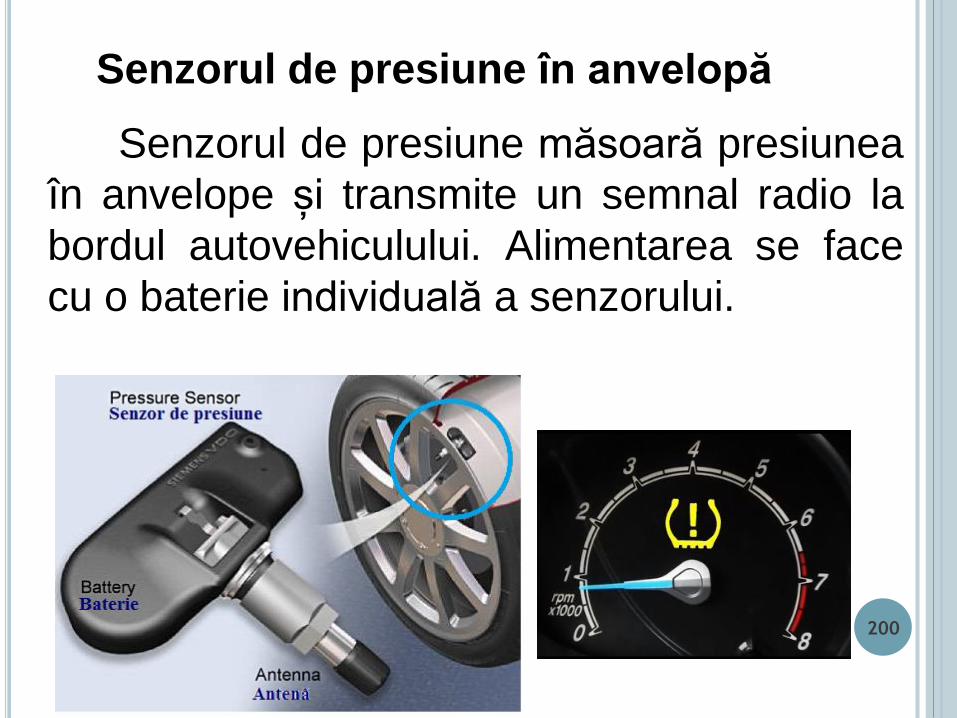
Senzorul de presiune măsoară presiunea
în anvelope și transmite un semnal radio la
bordul autovehiculului. Alimentarea se face
cu o baterie individuală a senzorului.
Senzorul de presiune în anvelopă
200
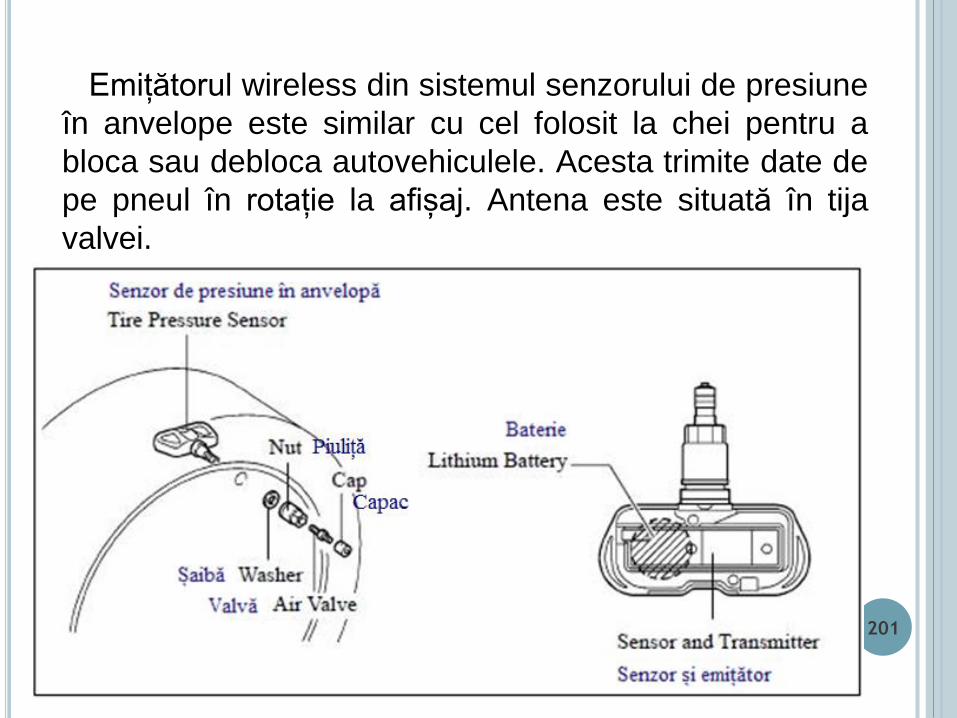
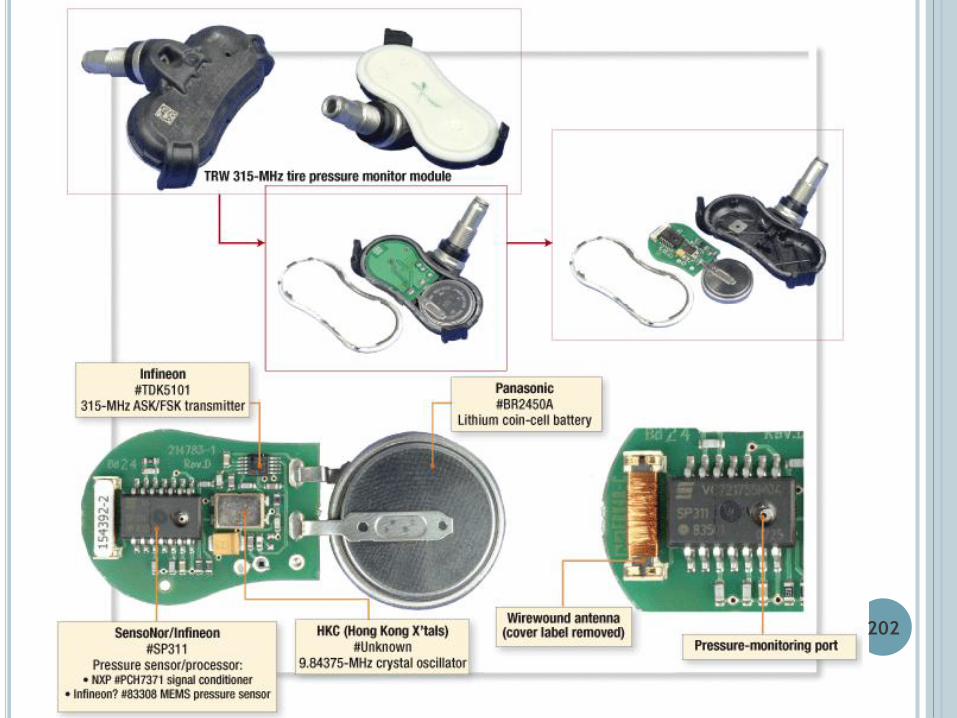
Emițătorul wireless din sistemul senzorului de presiune
în anvelope este similar cu cel folosit la chei pentru a
bloca sau debloca autovehiculele. Acesta trimite date de
pe pneul în rotație la afișaj. Antena este situată în tija
valvei.
201
202

Senzorul unghiului de virare (SAS)
203
Senzorul unghiului de virare (SAS) măsoară
poziția unghiului volanului și viteza acestuia de
rotație. Acesta utilizează un instrument de
scanare pentru a obține datele în grade.
Senzorul unghiului de virare este situat grupul
coloanei de direcție. Modulul de control
electronic al scânteii (ESC) primeste două
semnale de la senzor pentru a confirma poziția
volanului. Aceste semnale sunt defazate unul
față de celălalt.
204
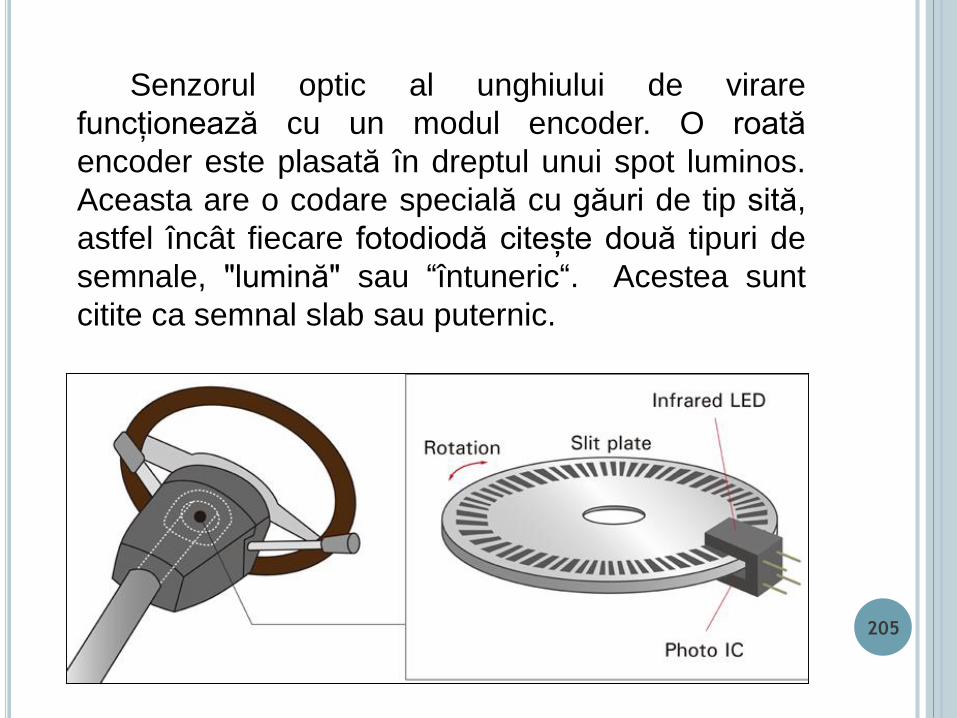
Senzorul optic al unghiului de virare
funcționează cu un modul encoder. O roată
encoder este plasată în dreptul unui spot luminos.
Aceasta are o codare specială cu găuri de tip sită,
astfel încât fiecare fotodiodă citește două tipuri de
semnale, "lumină" sau “întuneric“. Acestea sunt
citite ca semnal slab sau puternic.
205

206
Sfârșit





























