Embed Size (px)
Citation preview

Ecuaciones Diferenciales Ordinarias 1 / 97
Ecuaciones Diferenciales Ordinarias
Rafael Ramírez Ros
2 de diciembre de 2019

Ecuaciones Diferenciales Ordinarias 2 / 97
Introducción
Índice
1 Introducción
2 Ejemplos (modelos & preguntas)
3 EDOs de 1er orden autónomas
4 Resolución de SLs de 1er orden a CC
5 Resolución de EDOLs de 1er y 2o orden a CC
6 Estabilidad de SLs de 1er a CC
7 Estabilidad de SNLAs
8 Ejemplos (respuestas & interpretaciones)

Ecuaciones Diferenciales Ordinarias 3 / 97
Introducción
Abreviaturas
EDO = Ecuación diferencial ordinariaEDOL = EDO linealEDOLH = EDO lineal homogéneaEDOLNH = EDO lineal no homogéneaSL = Sistema linealSLH = Sistema lineal homogéneoSLNH = Sistema lineal no homogéneoSNL = Sistema no linealSNLA = Sistema no lineal autónomoCC = coeficientes constantesCI = condición inicialPVI = Problema de valor inicialPVIL = Problema de valor inicial lineal

Ecuaciones Diferenciales Ordinarias 4 / 97
Introducción
EDOs de 1er orden
Una EDO de 1er orden es una ecuación de la forma
x ′ = f (t , x),
donde:t = variable independiente (usualmente, el tiempo),x = x(t) es la incógnita (o variable dependiente),′ = d/dt ,f : R× R→ R es una expresión dada.
La EDO es autónoma si f (t , x) no depende de t .La EDO es lineal (EDOL) si f (t , x) = a(t)x + b(t).La EDOL es homogénea cuando b(t) ≡ 0.La EDOL es a CC cuando a(t) es constante.CI = x(t0) = x0, t0 = tiempo inicial, x0 = valor inicial.PVI = EDO + fijar CI; PVIL = EDOL + fijar CI.Teorema: PVI/PVIL “bueno”⇒ ∃! solución local/global.

Ecuaciones Diferenciales Ordinarias 5 / 97
Introducción
EDOs de 2o orden
Una EDO de 2o orden es una ecuación de la forma
x ′′ = f (t , x , x ′),
donde:t = variable independiente (usualmente, el tiempo),x = x(t) es la incógnita (o variable dependiente),′ = d/dt , ′′ = d2/dt2,f : R× R× R→ R es una expresión dada.
La EDO es autónoma si f (t , x , x ′) no depende de t .La EDO es lineal si f (t , x , x ′) = a0(t)x + a1(t)x ′ + b(t).La EDOL es homogénea cuando b(t) ≡ 0.La EDOL es a CC si a0(t) y a1(t) son constantes.CI = x(t0) = x0, x ′(t0) = x1, x0, x1 = valores iniciales.PVI = EDO + fijar CI; PVIL = EDOL + fijar CI.Teorema: PVI/PVIL “bueno”⇒ ∃! solución local/global.

Ecuaciones Diferenciales Ordinarias 6 / 97
Introducción
SLs de 1er orden
Una SL nD de 1er orden (en forma normal) es un sistemade n EDOs lineales de 1er orden de la forma
x ′ = A(t)x + b(t),
donde:t = variable independiente (usualmente, el tiempo),x = x(t) = (x1(t), . . . , xn(t)) es el vector incógnita,A =
(aij)
: R→Mn(R) es una función matricial dada,b = (b1, . . . ,bn) : R→ Rn es una función vectorial dada.
EL SL es homogéneo cuando b(t) ≡ 0.El SL es a CC cuando la matriz A(t) es constante.CI = x(t0) = x0, t0 = tiempo inicial, x0 = valor inicial.PVIL = SL + fijar CITeorema: PVIL “bueno”⇒ ∃! solución global.

Ecuaciones Diferenciales Ordinarias 7 / 97
Introducción
SNLs de 1er orden
Una SNL nD de 1er orden (en forma normal) es unsistema de n EDOs no lineales de 1er orden de la forma
x ′ = F (t ,x),
donde:t = variable independiente (usualmente, el tiempo),x = x(t) = (x1(t), . . . , xn(t)) es el vector incógnita,F : R× Rn → Rn es un campo vectorial dado.
EL SNL es autónomo si F (t ,x) no depende de t .Los SLs son un caso particular: F (t ,x) = A(t)x + b(t).CI = x(t0) = x0, t0 = tiempo inicial, x0 = valor inicial.PVI = SNL + fijar CITeorema: PVI “bueno”⇒ ∃! solución local.

Ecuaciones Diferenciales Ordinarias 8 / 97
Introducción
EDOs orden n Sistema nD de 1er orden
La EDO de 2o orden x ′′ = f (t , x , x ′) es equivalente al SNL2D de 1er orden x ′ = F (t ,x) dado por
x =
(x1x2
)=
(xx ′
), F (t ,x) =
(x2
f (t , x1, x2)
).
La EDOL de 2o orden x ′′ = a0(t)x + a1(t)x ′ + b(t) esequivalente al SL 2D de 1er orden x ′ = A(t)x + b(t) donde
x =
(xx ′
), A(t) =
(0 1
a0(t) a1(t)
), b(t) =
(0
b(t)
).
Esta estrategia sirve para EDOs de cualquier orden.

Ecuaciones Diferenciales Ordinarias 9 / 97
Ejemplos (modelos & preguntas)
Índice
1 Introducción
2 Ejemplos (modelos & preguntas)
3 EDOs de 1er orden autónomas
4 Resolución de SLs de 1er orden a CC
5 Resolución de EDOLs de 1er y 2o orden a CC
6 Estabilidad de SLs de 1er a CC
7 Estabilidad de SNLAs
8 Ejemplos (respuestas & interpretaciones)

Ecuaciones Diferenciales Ordinarias 10 / 97
Ejemplos (modelos & preguntas)
Un depósito: Unidades, parámetros & incógnita
Unidades: h (tiempo), kg (masa) y m3 (volumen).Parámetros: r = caudal entrada, γ = concentración deuna sustancia X en la entrada y V = volumen.Incógnita: c(t) = concentración de X en el instante t
- -
r m3/h
γ kg/m3
r m3/h
c(t) kg/m3
V m3
c(t) kg/m3
Figura : Un único depósito con una salida y una entrada.

Ecuaciones Diferenciales Ordinarias 11 / 97
Ejemplos (modelos & preguntas)
Un depósito: Hipótesis & modelización
Hipótesis:1 El volumen V se mantiene constante, luego el caudal de
salida es igual a r .2 La sustancia se distribuye de forma inmediata y uniforme
por todo el depósito, luego la concentración de salida esigual a c(t).
Cantidad dentro = Vc(t) kg⇒ variación = Vc′(t) kg/h.Entrada = rγ kg/h. Salida = rc(t) kg/h.Vc′ = variación = entrada− salida = rγ − rc.Modelo: Es la EDOLNH a CC de 1er orden c′ = ac + b,donde a = −r/V y b = rγ/V .PVI: Una vez fijada una CI c(t0) = c0, queda determinadoel comportamiento pasado y futuro de c(t).Pregunta: ¿Qué se puede decir de limt→+∞ c(t)?

Ecuaciones Diferenciales Ordinarias 12 / 97
Ejemplos (modelos & preguntas)
Dos depósitos: Unidades, parámetros & incógnitas
Unidades: h (tiempo), kg (masa) y m3 (volumen).Parámetros: r = caudal trasvase, Vj = volumen depósito j .Incógnitas: cj(t) = concentración depósito j , instante t .
-r m3/h
r m3/h
c1(t) kg/m3
c2(t) kg/m3
V1 m3
c1(t) kg/m3V2 m3
c2(t) kg/m3
Figura : Dos depósitos conectados formando un circuito cerrado.

Ecuaciones Diferenciales Ordinarias 13 / 97
Ejemplos (modelos & preguntas)
Dos depósitos: Hipótesis & ecuaciones de balance
Hipótesis:1 Los dos volúmenes se mantienen constantes, luego el
caudal de derecha a izquierda es igual a r .2 La sustancia se distribuye de forma inmediata y uniforme
en cada depósito, luego las concentraciones de trasvaseson c1(t) y c2(t).
Variación depósito j : Vc′j (t) kg/h.Entrada depósito j : rci(t) kg/h, con i 6= j .Salida depósito j : rcj(t) kg/h.Ecuaciones de balance en cada depósito:
1o: V1c′1 = variación = entrada− salida = rc2 − rc1,
2o: V2c′2 = variación = entrada− salida = rc1 − rc2.

Ecuaciones Diferenciales Ordinarias 14 / 97
Ejemplos (modelos & preguntas)
Dos depósitos: Modelo, PVI & preguntas
Modelo: Es el SLH a CC 2D c′ = Ac, donde
c =
(c1c2
), A =
(−r/V1 r/V1
r/V2 −r/V2
).
PVI: Para determinar el vector concentración c(t) hemosde fijar el vector concentración inicial c(t0) = c0.Preguntas:
1 ¿Para qué valores de c0 ∈ R2 se cumple que c(t) ≡ c0?(Estos valores son los puntos de equilibrio del sistema.)
2 ¿Qué se puede decir de limt→+∞ c(t)?3 ¿Cuál es la variación de S(c1, c2) = V1c1 + V2c2?
(S es la cantidad total de sustancia X en el circuito.)

Ecuaciones Diferenciales Ordinarias 15 / 97
Ejemplos (modelos & preguntas)
Grandes Lagos: Unidades, incógnitas & hipótesis
Los Grandes Lagos son cinco lagos (Superior, Michigan,Huron, Eire y Ontario) a lo largo de la frontera entre EEUUy Canada con varias interconexiones entre ellos.(Ver la figura de la siguiente página.)Problema: Estudiar la evolución en las concentraciones deuna sustancia contaminante.Unidades: año (tiempo), Tm (masa) y mi3 (volumen).Incógnitas: Concentraciones s(t), m(t), h(t), e(t) y o(t).Hipótesis:
1 Los cinco volúmenes se mantienen constantes.2 El contaminante se distribuye de forma inmediata y
uniforme en cada lago.3 Solo entra agua pura a partir de un instante inicial t0.

Ecuaciones Diferenciales Ordinarias 16 / 97
Ejemplos (modelos & preguntas)
Grandes Lagos: Figura

Ecuaciones Diferenciales Ordinarias 17 / 97
Ejemplos (modelos & preguntas)
Grandes Lagos: Modelo, PVI & preguntas
Modelo: El SLH a CC 5D c′ = Ac, donde
c =
smheo
,A =
− 3
580 0 0 0 00 − 19
590 0 0 03
17019
425 − 225 0 0
0 0 1729 − 85
116 00 0 0 85
393 − 33131
.
PVI: Para determinar el vector concentración c(t)necesitamos fijar el vector concentración inicial c(t0) = c0.Preguntas:
1 ¿Para qué valores de c0 ∈ R5 se cumple que c(t) ≡ c0?(Estos valores son los puntos de equilibrio del sistema.)
2 ¿Qué se puede decir de limt→+∞ c(t)?3 ¿Cuántos años tardará la contaminación en reducirse al
50% en cada lago?

Ecuaciones Diferenciales Ordinarias 18 / 97
Ejemplos (modelos & preguntas)
Muelle clásico: Unidades, hipótesis & parámetros
Problema: Un muelle vertical tiene un extremo fijado y enel otro una masa puntual que oscila verticalmentesometida a una fuerza exterior F (t).Unidades: s (tiempo), m (longitud), kg (masa) y N (fuerza).Hipótesis:
1 La fuerza de recuperación del muelle es proporcional (ytiene sentido opuesto) al desplazamiento desde la posiciónde equilibrio (Ley de Hooke).
2 La fuerza de fricción es proporcional (y tiene sentidoopuesto) a la velocidad de la masa.
Parámetros: m = masa, k = ctte Hooke, µ = coef. fricción.Variable independiente: t = tiempo.Incógnita: x = x(t) = desplazamiento desde el equilibrio.

Ecuaciones Diferenciales Ordinarias 19 / 97
Ejemplos (modelos & preguntas)
Muelle clásico: Modelo, PVI & preguntas
2a Ley Newton: mx ′′ = −µx ′ − kx + F (t).Modelo: La EDOLH a CC de 2o orden
x ′′ + 2γx ′ + ω20x ′ = b(t),
donde γ = µ/2m ≥ 0, ω0 =√
k/m > 0 y b(t) = F (t)/m.Nota: Si no hay fricción: µ = 0, entonces decimos que ω0es la frecuencia natural del muelle.PVI: Para determinar el movimiento, hemos de fijar laposición y velocidad iniciales: x(t0) = x0 y x ′(t0) = v0.Preguntas:
1 ¿Cuándo existen movimientos periódicos?2 Si existen, ¿cuántos hay? y ¿de qué periodo?3 ¿Qué se puede decir de limt→+∞ x(t)?

Ecuaciones Diferenciales Ordinarias 20 / 97
Ejemplos (modelos & preguntas)
Péndulo de Wilberforce: Problema & hipótesis
Problema: Una masa puntual cuelga de un muelle flexibleen forma de espiral, oscilando verticalmente ytorsionalmente.Hipótesis:
1 Ley de Hooke: La fuerza de recuperación torsional/verticaldel muelle es proporcional (y tiene sentido opuesto) aldesplazamiento torsional/vertical desde la posición deequilibrio.
2 La fuerza de fricción es proporcional (y tiene sentidoopuesto) a la velocidad de la masa.
3 Cada oscilación ejerce sobre la otra un efecto proporcionala su propio desplazamiento, con una pequeña constantede proporcionalidad común.
4 Resonancia: Las frecuencias naturales de ambasoscilaciones coinciden cuando no hay ni acoplamiento nifricción.

Ecuaciones Diferenciales Ordinarias 21 / 97
Ejemplos (modelos & preguntas)
Péndulo de Wilberforce: Parámetros & incógnitas
Parámetros:m = masa.I = momento de inercia.k1 = constante de Hooke del movimiento vertical.k2 = constante de Hooke del movimiento torsional.µ1 = coeficiente de fricción del movimiento vertical.µ2 = coeficiente de fricción del movimiento torsional.ε = pequeño parámetro de acoplamiento.
Resonancia: k1/m = k2/I.Incógnitas:
y(t) = desplazamiento vertical desde el equilibrio,θ(t) = desplazamiento torsional desde el equilibrio.

Ecuaciones Diferenciales Ordinarias 22 / 97
Ejemplos (modelos & preguntas)
Péndulo de Wilberforce: Modelo
2a Ley de Newton:
my ′′ = −µ1y ′ − k1y + εθIθ′′ = −µ2θ
′ − k2θ + εyIncógnitas auxiliares:
z = y ′ = velocidad vertical.Ω = θ′ = velocidad angular.
Parámetros auxiliares:ω0 =
√k1/m =
√k2/I = frecuencia natural.
γ1 = µ1/2m y δ1 = ε/mγ2 = µ2/2I y δ2 = ε/I.
Modelo: El SLH a CC 4D x ′ = Ax , donde
x =
yzθΩ
, A =
0 1 0 0−ω2
0 −2γ1 δ1 00 0 0 1δ2 0 −ω2
0 −2γ2
.

Ecuaciones Diferenciales Ordinarias 23 / 97
Ejemplos (modelos & preguntas)
Péndulo de Wilberforce: Energía & preguntas
La energía mecánica total del péndulo de Wilberforce es
E(y , z, θ,Ω) =m2
z2 +k1
2y2︸ ︷︷ ︸
modo vertical
+I2
Ω2 +k2
2θ2︸ ︷︷ ︸
modo torsional
− εyθ︸︷︷︸acopl.
.
Si no hay fricción, entonces:1 ¿Cuál es la explicación de la transferencia de energía entre
los dos modos que se ve en este video de Youtube?2 ¿Cuál es el periodo de esta transferencia de energía?3 ¿Cuál es la variación de la energía mecánica total?
Si hay fricción, entonces:1 ¿Qué se puede decir de limt→+∞ y(t) y limt→+∞ θ(t)?2 ¿Cuál es la variación de la energía mecánica total?

Ecuaciones Diferenciales Ordinarias 24 / 97
Ejemplos (modelos & preguntas)
Péndulo simple: Unidades, hipótesis, parámetros
Problema: Una varilla inextensible de masa despreciabletiene un extremo fijado y en el otro una masa puntual queoscila libremente en un plano vertical fijo.Unidades: s (tiempo), m (longitud), kg (masa) y N (fuerza).Hipótesis: La fuerza de fricción es proporcional (y tienesentido opuesto) a la velocidad lineal de la masa.Parámetros:
m = masa.l = longitud.g = aceleración de la gravedad.µ = coeficiente de fricción.
Variable independiente: t = tiempo.Incógnita: θ = θ(t) = desplazam. desde posición inferior.

Ecuaciones Diferenciales Ordinarias 25 / 97
Ejemplos (modelos & preguntas)
Péndulo simple: Modelo, PVI & preguntas
2a Ley Newton: mlθ′′ = −µlθ′ −mg sin θ.Modelo: La EDONL de 2o orden
θ′′ + bθ′ + c sin θ = 0, b = µ/m, c = g/l .
PVI: Para determinar el movimiento, hemos de fijar laposición y velocidad iniciales: θ(t0) = θ0 y θ′(t0) = ω0.Preguntas:
1 ¿Para qué valores de θ0 y ω0 se cumple que θ(t) ≡ θ0? (Osea, ¿cuáles son las posiciones de equilibrio del péndulo?)
2 Si no hay fricción: ¿Cuál es el periodo de las pequeñasoscilaciones del péndulo?, ¿existen movimientos noperiódicos?, ¿existe alguna cantidad conservada?
3 Si hay fricción: ¿Qué se puede decir de limt→+∞ θ(t)?

Ecuaciones Diferenciales Ordinarias 26 / 97
Ejemplos (modelos & preguntas)
Platelmintos: Parámetros, hipótesis & incógnitas
Problema: Estudiar el movimiento de unos platelmintosque nadan en una cuba cilíndrica rotatoria de paredestransparentes en dirección a la luz más cercana.Parámetros: r = radio cuba, ω = velocidad rotación cuba,v = velocidad platelmintos.Posición luz: (r ,0).Hipótesis: v < ωr . (De lo contrario, alcanzan la luz.)Variable independiente: t = tiempo.Incógnitas: (x , y) = (x(t), y(t)) = posición instante t .Velocidad total = Velocidad rotación + Velocidad arrastre,luego (
x ′, y ′)
= (−ωy , ωx) + v(r − x ,−y)
‖(r − x ,−y)‖.

Ecuaciones Diferenciales Ordinarias 27 / 97
Ejemplos (modelos & preguntas)
Platelmintos: Modelo, PVI & preguntas
Modelo: El SNLA 2D de 1er ordenx ′ = −ωy +
v(r − x)√(r − x)2 + y2
y ′ = ωx − vy√(r − x)2 + y2
PVI: Para determinar el movimiento, hemos de fijar laposición inicial (x(t), y(t)) = (x0, y0).Preguntas:
1 ¿Para qué puntos (x0, y0) se cumple (x(t), y(t)) ≡ (x0, y0)?(O sea, ¿cuáles son las posiciones de equilibrio?)
2 ¿Qué se puede decir de limt→+∞(x(t), y(t))?3 ¿Cuándo se aleja el platelminto del centro de la cuba?

Ecuaciones Diferenciales Ordinarias 28 / 97
EDOs de 1er orden autónomas
Índice
1 Introducción
2 Ejemplos (modelos & preguntas)
3 EDOs de 1er orden autónomas
4 Resolución de SLs de 1er orden a CC
5 Resolución de EDOLs de 1er y 2o orden a CC
6 Estabilidad de SLs de 1er a CC
7 Estabilidad de SNLAs
8 Ejemplos (respuestas & interpretaciones)

Ecuaciones Diferenciales Ordinarias 29 / 97
EDOs de 1er orden autónomas
Retratos de fase
Consideramos la EDO de 1er orden autónoma
x ′ = f (x), x ∈ R,
donde:t = variable independiente (usualmente, el tiempo),x = x(t) es la incógnita (o variable dependiente),x ′ = dx/dt es la primera derivada de x respecto t , yf : R→ R es una expresión dada.
Objetivo: Describir de forma completa el comportamientode sus soluciones sin tener que resolverla.Método: Representar en la recta R todos sus puntos deequilibrio (puntos donde se anula f ) y el sentido de sustrayectorias (según el signo de f ) mediante flechas.

Ecuaciones Diferenciales Ordinarias 30 / 97
EDOs de 1er orden autónomas
Modelo de Malthus
Una población (una sola especie) vive aislada deinfluencias externas y dispone de recursos infinitos.Variable independiente: t = tiempo.Incógnita: x = x(t) ≥ 0, es el tamaño de la población.La evolución se suele modelar mediante la EDOLH a CC
x ′ = kx , x ≥ 0,
donde k = natalidad−mortalidad ∈ R. Suponemos k > 0.Los puntos x < 0 no tienen sentido biológico.Existe un único punto de equilibrio: x = 0.La población crece sin límite:
t0
x ′ < 0J
x ′ > 0I

Ecuaciones Diferenciales Ordinarias 31 / 97
EDOs de 1er orden autónomas
Modelo de Verhulst (ecuación logística)
Una población (una sola especie) vive aislada deinfluencias externas, pero solo dispone de recursos finitos.La evolución se suele modelar mediante la EDONL
x ′ = kx(1− x/m), x ≥ 0,
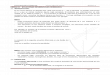
donde k > 0 es el índice de crecimiento y m > 0 es lacapacidad de carga (máximo tamaño de población quesoporta el ecosistema).Puntos de equilibrio: x = 0 y x = m.La población tiende a la capacidad de carga:
t t0 m
x ′ < 0J
x ′ > 0I
x ′ < 0J

Ecuaciones Diferenciales Ordinarias 32 / 97
EDOs de 1er orden autónomas
Modelo de pesca
x(t) = población de un banco de atunes el día t .Hipótesis: Cada día se pescan p atúnes.Pregunta: ¿Cuál es el máximo valor sostenible de p?Modelo: x ′ = kx(1− x/m)− p, x ≥ 0, donde k ,m > 0 soncomo en la ecuación logística.0 ≤ p < km/4⇒ hay dos puntos de equilibrio x±:
t t t0 x− x+
x ′ < 0J
x ′ > 0I
x ′ < 0J
p = km/4⇒ existe un único punto de equilibrio:
t t0 m/2
x ′ < 0J
x ′ < 0J
p > km/4⇒ no hay puntos de equil. y el banco se agota.

Ecuaciones Diferenciales Ordinarias 33 / 97
EDOs de 1er orden autónomas
Ecuación del paracaidista
Un paracaidista cae con el paracaídas abierto.Variable independiente: t = tiempo.Incógnita: v = v(t) ≥ 0, es la velocidad de caída.Hipótesis: La fricción es proporcional a v2.Parámetros:
k = constante de proporcionalidad;g = intensidad de la gravedad; ym = masa del paracaidista.
Modelo: mv ′ = mg − kv2 v ′ = f (v) := g − kv2/m.Existe un único punto de equilibrio: v? =
√mg/k
v? = velocidad terminal.La velocidad de caída tiende a la velocidad terminal:
tv?
v ′ > 0I
v ′ < 0J

Ecuaciones Diferenciales Ordinarias 34 / 97
Resolución de SLs de 1er orden a CC
Índice
1 Introducción
2 Ejemplos (modelos & preguntas)
3 EDOs de 1er orden autónomas
4 Resolución de SLs de 1er orden a CC
5 Resolución de EDOLs de 1er y 2o orden a CC
6 Estabilidad de SLs de 1er a CC
7 Estabilidad de SNLAs
8 Ejemplos (respuestas & interpretaciones)

Ecuaciones Diferenciales Ordinarias 35 / 97
Resolución de SLs de 1er orden a CC
Abreviaturas
EV = Espacio vectorialSEV = Subespacio vectorialCL = Combinación linealLI/LD = Linealmente independiente/dependienteVAP/VEP = Valor/vector propioMA/MG = Multiplicidad algebraica/geométricaSL = Sistema linealSLH/SLNH = Sistema lineal homogéneo/no homogéneoCC = coeficientes constantesCI = condición inicialPVIL = Problema de valor inicial lineal

Ecuaciones Diferenciales Ordinarias 36 / 97
Resolución de SLs de 1er orden a CC
Teorema de existencia y unicidad
En esta sección consideramos SLs nD de 1er orden a CC.Es decir, sistemas de la forma
x ′ = Ax + b(t),
dondet ∈ R es la variable independiente (usualmente, el tiempo),x = x(t) = (x1(t), . . . , xn(t)) es el vector incógnita,A ∈Mn(R) es una matriz cuadrada constante, yb : I → Rn es una función continua en un intervalo I ⊂ R.
Teorema: Si t0 ∈ I y x0 ∈ Rn, entonces el PVIL
x ′ = Ax + b(t), x(t0) = x0,
tiene exactamente una solución global; es decir, unasolución definida en todo el intervalo I.

Ecuaciones Diferenciales Ordinarias 37 / 97
Resolución de SLs de 1er orden a CC
Estructura de las soluciones de SLHs a CC
Las soluciones del SLH x ′ = Ax forman un SEV dedimensión n contenido en el EV C1(R; Rn).Un conjunto fundamental de soluciones es cualquier basede este SEV. Es decir, un conjunto de n soluciones LI.La solución general de x ′ = Ax es de la forma
xh(t) = c1x1(t) + · · ·+ cnxn(t), c1, . . . , cn ∈ R,
donde x1(t), . . . ,xn(t) son n soluciones LI.Una matriz fundamental es una matriz cuadrada X (t) talque X ′(t) = A(t)X (t) y det[X (t)] 6= 0.Es decir, las columnas de X (t) son n soluciones LI.Si X (t) es una matriz fundamental, entonces
xh(t) = X (t)c, c ∈ Rn,
es la solución general del SLH.

Ecuaciones Diferenciales Ordinarias 38 / 97
Resolución de SLs de 1er orden a CC
Wronskiano
Si x1(t), . . . ,xn(t) son n soluciones (LD o LI), entonces
w(t) = det[x1(t), . . . ,xn(t)]
es su wronskiano.Es decir, w(t) es el determinante de la matriz cuadradaque se obtiene al poner las n soluciones en columnas.Sirve para comprobar si las soluciones son LD o LI:
LD⇔ w(t) = 0 para todo t ∈ I.LI⇔ w(t) 6= 0 para todo t ∈ I.

Ecuaciones Diferenciales Ordinarias 39 / 97
Resolución de SLs de 1er orden a CC
Matrices diagonalizables
Si v es un VEP de VAP λ de la matriz A, entonces
x(t) = eλtv
es una solución del SLH x ′ = Ax . Y si, además, u es otrovector tal que Au = λu + v , entonces
q(t) = eλt (u + tv)
es otra solución del SLH x ′ = Ax .Si A diagonaliza, entonces existe una base v1, . . . ,vnde VEPs de VAPs λ1, . . . , λn y
xh(t) = c1eλ1tv1 + · · ·+ cneλntvn, c1, . . . , cn ∈ R,
es la solución general del SLH x ′ = Ax .A diagonaliza si y solo si MA(λ) = MG(λ) para todo VAP λ.Los VAPs simples no dan problemas, pues 1 ≤ MG ≤ MA.

Ecuaciones Diferenciales Ordinarias 40 / 97
Resolución de SLs de 1er orden a CC
Matrices reales con VAPs complejos
Los VAPs y VEPs complejos de matrices reales van enparejas conjugadas.Si v± = u ±w i son VEPs complejos conjugados de VAPsλ± = α± βi de una matriz real A, entonces
y(t) = eαt(u cosβt −w sinβt),
z(t) = eαt(u sinβt + w cosβt),
son dos soluciones reales LI del SLH x ′ = Ax .Nota: u = Re(v+), w = Im(v+), α = Re(λ+), β = Im(λ+).Si una matriz real A diagonaliza, pero tiene VAPscomplejos, entonces la solución general del SLH x ′ = Axes una CL de n soluciones reales de la formas descritasen las funciones x(t), y(t) y z(t).

Ecuaciones Diferenciales Ordinarias 41 / 97
Resolución de SLs de 1er orden a CC
SLNHs de 1er orden a CC
Diremos que x ′ = Ax es el SLH asociado a x ′ = Ax + b(t).La solución general del SLNH x ′ = Ax + b(t) es
xg(t) = xh(t) + xp(t),
donde xh(t) es la solución general del SLH asociado yxp(t) es una solución particular arbitraria del SLNH.Fórmula de variación de las constantes: Si X (t) es unamatriz fundamental del SLH x ′ = Ax y la función vectorialu : I → Rn cumple que X (t)u′(t) = b(t), entonces
xp(t) = X (t)u(t)
es una solución particular del SLNH x ′ = Ax + b(t).Truco: Si b = b(t) es constante y el sistema Ax + b = 0 escompatible, entonces el SLNH tiene alguna soluciónparticular constante.

Ecuaciones Diferenciales Ordinarias 42 / 97
Resolución de EDOLs de 1er y 2o orden a CC
Índice
1 Introducción
2 Ejemplos (modelos & preguntas)
3 EDOs de 1er orden autónomas
4 Resolución de SLs de 1er orden a CC
5 Resolución de EDOLs de 1er y 2o orden a CC
6 Estabilidad de SLs de 1er a CC
7 Estabilidad de SNLAs
8 Ejemplos (respuestas & interpretaciones)

Ecuaciones Diferenciales Ordinarias 43 / 97
Resolución de EDOLs de 1er y 2o orden a CC
EDOLs de 1er orden a CC
Una EDOL de 1er orden a CC es una ecuación de la forma
x ′ = ax + b(t)
donde a ∈ R es un coeficiente constante y b(t) es unafunción continua en un intervalo abierto I ⊂ R.x ′ = ax es la EDOLH asociada a x ′ = ax + b(t).La solución general de la EDOLH x ′ = ax es
xh(t) = ceat , c ∈ R.
La solución general de la EDOLNH x ′ = ax + b(t) es
xg(t) = xh(t) + xp(t),
donde xp(t) = u(t)eat y u(t) =∫
e−atb(t)dt .

Ecuaciones Diferenciales Ordinarias 44 / 97
Resolución de EDOLs de 1er y 2o orden a CC
EDOLHs de 2o orden a CC
Una EDOLH de 2o orden a CC es una EDO de la forma
x ′′ + a1x ′ + a0x = 0,
donde los coeficientes a0,a1 ∈ R son constantes.P(m) = m2 + a1m + a0 es el polinomio característico.
Raíces de P(m) Solución general de la EDOLHReales simples:
m1 6= m2 ∈ R xh(t) = c1em1t + c2em2t
Real doble:m1 = m2 = m? ∈ R xh(t) = em?t (c1 + c2t)
Complejas conjugadas:m± = α± βi
xh(t) = eαt(c1 cosβt + c2 sinβt)

Ecuaciones Diferenciales Ordinarias 45 / 97
Resolución de EDOLs de 1er y 2o orden a CC
EDOLNHs de 2o orden a CC
La solución general de la EDOLNH x ′′ + a1x ′ + a0x = b(t):
xg(t) = xh(t) + xp(t).
xp(t) se suele obtener por coeficientes indeterminados:
Dato: b(t) A determinar: xp(t)E(t)elt E(t)tkelt(
C(t) cosβt + S(t) sinβt)eαt (
C(t) cosβt + S(t) sinβt)tkeαt
E(t),C(t),S(t) son polinomios conocidos de grado ≤ n,mientras que E(t), C(t), S(t) son polinomios de grado ≤ ncuyos coeficientes hay que determinar.k es la multiplicidad de l (respectivamente, de α± βi)como raíces del polinomio característico P(m).

Ecuaciones Diferenciales Ordinarias 46 / 97
Estabilidad de SLs de 1er a CC
Índice
1 Introducción
2 Ejemplos (modelos & preguntas)
3 EDOs de 1er orden autónomas
4 Resolución de SLs de 1er orden a CC
5 Resolución de EDOLs de 1er y 2o orden a CC
6 Estabilidad de SLs de 1er a CC
7 Estabilidad de SNLAs
8 Ejemplos (respuestas & interpretaciones)

Ecuaciones Diferenciales Ordinarias 47 / 97
Estabilidad de SLs de 1er a CC
Definiciones
Un punto x0 ∈ Rn es un punto de equilibrio del SLHx ′ = Ax cuando la veloidad en ese punto sea cero. Esdecir, cuando x0 ∈ Nuc A.El SLH x ′ = Ax es degenerado cuando tiene infinitospuntos de equilibrio. Es decir, cuando det A = 0.Diremos que el SLH x ′ = Ax es:
Inestable si alguna de sus soluciones escapa a infinitocuando t → +∞;Estable cuando no es inestable (es decir, cuando todas sussoluciones están acotadas para t ≥ 0);Atractor (también llamado asintóticamente estable) si todassus soluciones no triviales tienden al origen cuandot → +∞ y escapan a infinito cuando t → −∞; yRepulsor si todas sus soluciones no triviales escapan ainfinito cuando t → +∞ y tienden al origen cuandot → −∞.

Ecuaciones Diferenciales Ordinarias 48 / 97
Estabilidad de SLs de 1er a CC
Rectas y planos invariantes
Si v es un VEP de VAP λ ∈ R de la matriz A, entoncesr = [v ] es una recta invariante
Inestable (o de salida) del SLH x ′ = Ax cuando λ > 0.Estable (o de entrada) del SLH x ′ = Ax cuando λ < 0.De puntos de equilibrio del SLH x ′ = Ax cuando λ = 0.
Si v± = u ±w i son VEPs complejos conjugados de VAPsλ± = α± βi de la matriz A, entonces Π = [u,w ] es unplano invariante
Inestable (o de salida) del SLH x ′ = Ax cuando α > 0.Estable (o de entrada) del SLH x ′ = Ax cuando α < 0.De giros cerrados del SLH x ′ = Ax cuando α = 0.

Ecuaciones Diferenciales Ordinarias 49 / 97
Estabilidad de SLs de 1er a CC
Dos teoremas sobre SLHs a CC
Consideramos el SLH de 1er orden a CC x ′ = Ax .Estabilidad: El SLH de 1er orden a CC es
Inestable si y sólo si algún VAP de A tiene parte real > 0 oalgún VAP no semi-simple de A tiene parte real = 0.Atractor/repulsor si y sólo si todos sus VAPs tienen partereal negativa/positiva.
Un VAP es semi-simple cuando coinciden sus MA y MG.Evolución de un volumen: Dado un instante inicial t0 ∈ R yuna región inicial Wt0 ⊂ Rn, se cumple que
Vol[Wt ] = Vol[Wt0 ]etraza[A](t−t0),
donde Wt es la región que corresponde al instante t .El SLH a CC x ′ = Ax expande/conserva/contrae volumensi traza[A] es positiva/nula/negativa.

Ecuaciones Diferenciales Ordinarias 50 / 97
Estabilidad de SLs de 1er a CC
Clasificación de SLHs 2D a CC
Sea A una matriz real 2× 2. El SLH 2D a CC x ′ = Ax esDegenerado cuando det A = 0;Una silla, si los VAPs son reales y de signos diferentes;Un nodo, si los VAPs son reales pero del mismo signo, encuyo caso diremos que el nodo es:
atractor/repulsor si ambos VAPs son negativos/positivos;propio/impropio si la matriz diagonaliza/no diagonaliza;
Un centro, si los VAPs son imaginarios puros; yUn foco, si los VAPs son complejos conjugados de partereal no nula, en cuyo caso diremos que el foco esatractor/repulsor si su parte real es negativa/positiva.

Ecuaciones Diferenciales Ordinarias 51 / 97
Estabilidad de SLs de 1er a CC
Croquis de una silla
2 rectas invariantes:inestable yestable.
Las otras trayectoriasson “hipérbolas”.

Ecuaciones Diferenciales Ordinarias 52 / 97
Estabilidad de SLs de 1er a CC
Croquis de un nodo propio repulsor
2 rectas invariantes:inestable rápidainestable lenta.
Las otras trayectoriasson “parábolas”tangentes a ladirección lenta en elorigen y con ladirección rápida lejosde origen.
Nota: El casoatractor tiene lamisma “forma”.

Ecuaciones Diferenciales Ordinarias 53 / 97
Estabilidad de SLs de 1er a CC
Croquis de un nodo impropio atractor
1 recta invariante:estable
Las otras trayectoriastiene forma de “S” yson tangentes arecta invariante en elorigen y con esamisma dirección perosentido opuesto lejosde origen.
Nota: El casorepulsor tiene lamisma “forma”.

Ecuaciones Diferenciales Ordinarias 54 / 97
Estabilidad de SLs de 1er a CC
Croquis de un degenerado inestable
2 rectas invariantes:inestable yde puntos de eq.
Las otras trayectoriasson paralelas a larecta invarianteinestable.
Nota: El caso establetiene la misma“forma”.

Ecuaciones Diferenciales Ordinarias 55 / 97
Estabilidad de SLs de 1er a CC
Croquis de un centro
6 ∃ recta invariante
Las trayectorias sonperiódicas y formanelipses.
El sentido de giro sedetermina calculandola velocidad en unpunto.
Periodo: p = 2πβ

Ecuaciones Diferenciales Ordinarias 56 / 97
Estabilidad de SLs de 1er a CC
Croquis de un foco repulsor
6 ∃ recta invariante
Las trayectorias sonespirales.
El sentido de giro sedetermina calculandola velocidad en unpunto.
Tiempo en completaruna vuelta: p = 2π
β
Nota: El casoatractor tiene lamisma “forma”.

Ecuaciones Diferenciales Ordinarias 57 / 97
Estabilidad de SLs de 1er a CC
Criterio traza-determinante
Si T = traza A, D = det A y ∆ = T 2 − 4D, entonces tenemos elsiguiente esquema en el plano (T ,D):

Ecuaciones Diferenciales Ordinarias 58 / 97
Estabilidad de SNLAs
Índice
1 Introducción
2 Ejemplos (modelos & preguntas)
3 EDOs de 1er orden autónomas
4 Resolución de SLs de 1er orden a CC
5 Resolución de EDOLs de 1er y 2o orden a CC
6 Estabilidad de SLs de 1er a CC
7 Estabilidad de SNLAs
8 Ejemplos (respuestas & interpretaciones)

Ecuaciones Diferenciales Ordinarias 59 / 97
Estabilidad de SNLAs
SNLAs
Una SNLA nD de 1er orden (en forma normal) es unsistema de n EDOs no lineales de 1er orden de la forma
x ′ = F (x),
donde:t = variable independiente (usualmente, el tiempo),x = x(t) = (x1(t), . . . , xn(t)) es el vector incógnita,F : Rn → Rn es un campo vectorial dado.
Pensaremos que x son posiciones y x ′ son velocidades.Teorema: Si x0 ∈ Rn y t0 ∈ R, entonces el PVI
x ′ = F (x), x(t0) = x0,
tiene una única solución local; es decir, una solucióndefinida para todo t ≈ t0.

Ecuaciones Diferenciales Ordinarias 60 / 97
Estabilidad de SNLAs
Definiciones
El espacio de fases es el conjunto de posible posiciones.Tiene dimensión n.El espacio de fases ampliado es el conjunto de posiblesparejas “tiempo-posición”. Tiene dimensión n + 1.Una trayectoria es una solución x(t) del SNLA.Una órbita es la curva que describe una trayectoria.Dibujamos órbitas en el espacio de fases (eso se llamadibujar el croquis o retrato de fases) y trayectorias en elespacio de fases ampliado.Unicidad⇒ Dos órbitas diferentes no pueden tocarse.El campo de vectores de un SNLA consiste en asignar elvector velocidad x ′ = F (x) a cada posición x ∈ Rn.Las órbitas son curvas tangentes al campo de vectores.

Ecuaciones Diferenciales Ordinarias 61 / 97
Estabilidad de SNLAs
Trayectorias versus órbitas

Ecuaciones Diferenciales Ordinarias 62 / 97
Estabilidad de SNLAs
Campo de vectores

Ecuaciones Diferenciales Ordinarias 63 / 97
Estabilidad de SNLAs
Retrato de fases
SNLA:x ′ = x − yy ′ = 2− x2 − y2
Puntos de equilibrio:
(1,1) I, no R(silla no lineal)(−1,−1) R(nodo repulsor nolineal)

Ecuaciones Diferenciales Ordinarias 64 / 97
Estabilidad de SNLAs
Puntos de equilibrio
Un punto x0 ∈ Rn es un punto de equilibrio cuando lavelocidad en ese punto es igual a cero: F (x0) = 0.Un punto de equilibrio es:
Estable cuando todas las trayectorias que empiezansuficientemente cerca de x0 se mantienen cerca de x0;Inestable cuando no es estable;Atractor cuando es estable y, además, todas lastrayectorias que empiezan suficientemente cerca de x0cumplen que limt→+∞ x(t) = x0;Repulsor cuando se comporta como atractor al cambiar eltiempo (y, por tanto, las flechas) de sentido.
En el caso no lineal, estos conceptos solo tienen validezlocal. Es decir, suficientemente cerca de x0.La cuenca de atracción de un punto de equilibrio atractores el conjunto de puntos que son atraídos por él.

Ecuaciones Diferenciales Ordinarias 65 / 97
Estabilidad de SNLAs
Estabilidad por linealización
Si x0 ∈ Rn es un punto de equilibrio del SNLA x ′ = F (x), susistema linealizado es el SLH de 1er orden a CC dado por
y ′ = Ay , A =
(∂x ′i∂xj
(x0)
)1≤i,j≤n
.
Teorema
Si algún VAP tiene de parte real positiva, x0 es inestable.Si todos los VAPs tienen parte real negativa/positiva,entonces x0 es atractor/repulsor.En los otros casos, la linealización no decide la estabilidad.
Caso 2D: Si y ′ = Ay es un centro o un sistema degeneradoestable o si A = 0, entonces la linealización no decide.

Ecuaciones Diferenciales Ordinarias 66 / 97
Estabilidad de SNLAs
Cantidades conservadas: Definición
Dado un SNLA x ′ = F (x), la derivada temporal de unafunción V (x) es
dVdt
(x) =(V (x)
)′= 〈∇V (x),x ′〉 = 〈∇V (x),F (x)〉.
Diremos que V (x) es una cantidad conservada cuando suderivada temporal sea idénticamente nula.Si V (x) es una cantidad conservada, todas las trayectoriasestán contenidas en las curvas (caso 2D) o superficies(caso 3D) de nivel
V (x) = ctte.

Ecuaciones Diferenciales Ordinarias 67 / 97
Estabilidad de SNLAs
Cantidades conservadas: Ejemplo
El origen es un punto de equilibrio del SNLA 2Dx ′ = y(x − 1)y ′ = x(1− x)
La matriz del sistema linealizado tiene VAPs λ± = ±i,luego la linealización no decide la estabilidad del origen.V (x , y) = (x2 + y2)/2 es una cantidad conservada:
dVdt
=∂V∂x
dxdt
+∂V∂y
dydt
= xx ′+ yy ′ = xy(x −1 + 1− x) ≡ 0.
Todas las trayectorias están contenidas en lascircunferencias centradas en el origen, luego el origen esun punto de equilibrio estable no atractor.

Ecuaciones Diferenciales Ordinarias 68 / 97
Estabilidad de SNLAs
¿Cómo calcular las elipses de centros lineales?
Supongamos que el SLH 2D de 1er orden a CCx ′ = ax + byy ′ = cx + dy
es un centro, luego T = a + d = 0 y D = ad − bc > 0.Al imponer que V (x , y) = (αx2 + 2βxy + γy2)/2 sea unacantidad conservada:dVdt
=∂V∂x
dxdt
+∂V∂y
dydt
= (αx + βy)(ax + by) + (βx + γy)(cx + dy)
= (aα + cβ)x2 + (bα + (a + d)β + cγ)xy + (bβ + dγ)y2 ≡ 0,
obtenemos que α = c, β = d = −a y γ = −b.Por tanto, las trayectorias del centro describen las elipses
cx2 + (d − a)xy − by2 = ctte .

Ecuaciones Diferenciales Ordinarias 69 / 97
Estabilidad de SNLAs
Sillas & centros no lineales: Definiciones
Sea y ′ = Ay el sistema linealizado de un punto de equilibriox0 ∈ R2 de un SNLA 2D.
Si A tiene VAPs reales de signos diferentes, x0 es una sillano lineal. Es decir, existen dos curvas invariantes (laestable y la inestable) tangentes a los dos VEPs (el deVAP negativo y el de VAP positivo respectivamente) en x0que organizan la dinámica alrededor de x0.Si A tiene VAPs imaginarios puros λ± = ±βi y el SNLAtiene una cantidad conservada, x0 es un centro no lineal.Es decir, toda trayectoria que empieza en un punto x ≈ x0forma una curva cerrada y tarda un periodo P(x) encompletar una vuelta, donde
limx→x0
P(x) = 2π/β = periodo del sistema linealizado.

Ecuaciones Diferenciales Ordinarias 70 / 97
Estabilidad de SNLAs
Sillas & centros no lineales: Ejemplo
y
x
recta de salida-entradatrayectoria bi-asintotica
SNLA:
x ′ = y2 − yy ′ = x2 − x
Puntos de equilibrio:
(0,0) I, no R(silla no lineal)
(1,1) I, no R(silla no lineal)
(1,0) E, no A(centro no lineal)
(0,1) E, no A(centro no lineal)

Ecuaciones Diferenciales Ordinarias 71 / 97
Estabilidad de SNLAs
Evolución de un área/volumen
La divergencia de un SNLA x ′ = F (x) es la función
div F (x) = ∇ · F (x) :=∂x ′1∂x1
+ · · ·+ ∂x ′n∂xn
.
Teorema: En las posiciones x donde la divergencia espositiva/nula/negativa, el SNLA expande/preserva/contraeárea (caso 2D) o volumen (caso 3D), respectivamente.La divergencia no puede ser negativa/positiva en un puntode equilibrio repulsor/atractor.Si la divergencia de un SNLA 2D nunca es igual a cero,entonces no hay órbitas cerradas.Si la divergencia de un SNLA 3D nunca es igual a cero,entonces no hay superficies invariantes cerradas.

Ecuaciones Diferenciales Ordinarias 72 / 97
Estabilidad de SNLAs
Sistemas Hamiltonianos: Definición & propiedades
Los sistemas Hamiltonianos autónomos (SHAs) con ungrado de libertad son SNLAs 2D de la forma
x ′ =∂H∂y
(x , y), y ′ = −∂H∂x
(x , y),
para alguna función H(x , y) llamada Hamiltoniano.Propiedades de los SHAs con un grado de libertad:
1 Conservan áreas;2 No tienen puntos de equilibrio atractores ni repulsores;3 El Hamiltoniano es una cantidad conservada;4 Si A es la matriz del sistema linealizado de un punto de
equilibrio (x0, y0), entonces el punto (x0, y0) es unasilla/centro no lineal cuando det A es negativo/positivo.

Ecuaciones Diferenciales Ordinarias 73 / 97
Estabilidad de SNLAs
Sistemas Hamiltonianos: Ejemplo
y
x
recta de salida-entradatrayectoria bi-asintotica
Hamiltoniano:
H(x , y) =x2 − y2
2+
y3 − x3
3
SHA:
x ′ = y2 − yy ′ = x2 − x
Curvas de nivel: H(x , y) = ctteSeparatriz: H(x , y) = 0Puntos de equilibrio:
(0,0) y (1,1), sillas nolineales
(1,0) y (0,1), centros nolineales

Ecuaciones Diferenciales Ordinarias 74 / 97
Estabilidad de SNLAs
Funciones definidas y semidefinidas
Una función W : Rn → R es semidefinida positiva/negativaen un punto x0 cuando tiene un mínimo/máximo local enese punto y, además, W (x0) = 0.Y es definida positiva/negativa cuando, además, esemínimo/máximo local es estricto.Caso 2D/3D: Las curvas/superficies de nivel de unafunción definida positiva en x0 forman curvas/superficiescerradas alrededor de x0.Caso x0 = 0: Si i , j , k > 0 son potencias pares, entonces:
W (x , y) = ax i + by j definida positiva ⇔ a,b > 0.W (x , y) = ax i + by j semidefinida positiva ⇔ a,b ≥ 0.W (x , y , z) = ax i + by j + czk definida positiva ⇔ a,b, c > 0.W (x , y , z) = ax i +by j +czk semidef. positiva ⇔ a,b, c ≥ 0.
W (x , y) = 2− cos x − cos 3y = (x2 + 9y2)/2 + O(x4, y4)es definida positiva en el origen.

Ecuaciones Diferenciales Ordinarias 75 / 97
Estabilidad de SNLAs
Estabilidad por Liapunov
Teorema
Sea x0 un punto de equilibrio del SNLA x ′ = F (x). Sea V (x)una función que tiene un mínimo local estricto en x0. SeaW (x) = 〈∇V (x),F (x)〉 su derivada temporal.
1 W (x) def. negativa/positiva en x0 ⇒ x0 atractor/repulsor.2 W (x) semidef. negativa en x0 ⇒ x0 estable.3 W (x) semidef. positiva en x0 ⇒ x0 no atractor.4 W (x) ≡ 0⇒ x0 estable no atractor.
Observaciones:Encontrar la V (x) adecuada no es fácil.En problemas de Mecánica, V (x) suele ser la energíamecánica total.

Ecuaciones Diferenciales Ordinarias 76 / 97
Ejemplos (respuestas & interpretaciones)
Índice
1 Introducción
2 Ejemplos (modelos & preguntas)
3 EDOs de 1er orden autónomas
4 Resolución de SLs de 1er orden a CC
5 Resolución de EDOLs de 1er y 2o orden a CC
6 Estabilidad de SLs de 1er a CC
7 Estabilidad de SNLAs
8 Ejemplos (respuestas & interpretaciones)

Ecuaciones Diferenciales Ordinarias 77 / 97
Ejemplos (respuestas & interpretaciones)
Un depósito: Respuesta & interpretación
Modelo: c′ = ac + b, donde a = −r/V 6= 0 y b = rγ/V .Solución general:
cg(t) = ch(t) + cp(t) = αeat + eat∫
e−atb dt = αeat − b/a,
donde α ∈ R es una constante libre.Solución asociada a la CI c(t0) = c0:
c(t) = (c0 + b/a)ea(t−t0) − b/a = γ + (c0 − γ)e−r(t−t0)/V .
Respuesta: limt→+∞ c(t) = γ.Interpretación: Independientemente del valor de laconcentración inicial, la concentración en el depósitotiende a equilibrarse con la concentración de entrada.Además, tendemos rápidamente al equilibrio si r/V 1.

Ecuaciones Diferenciales Ordinarias 78 / 97
Ejemplos (respuestas & interpretaciones)
Dos depósitos: Resolución
PVI: El SLH 2D a CC c′ = Ac con la CI c(0) = c0, donde
c =
(c1c2
), A =
(−a1 a1
a2 −a2
), c0 =
(γ1γ2
),
y aj = r/Vj = porción depósito j que se renueva por hora.VAPs: λ1 = 0 y λ2 = −(a1 + a2) = −r(V1 + V2)/V1V2 < 0.
VEPs: v1 =
(11
)y v2 =
(a1−a2
).
Estabilidad & clasificación: Sistema degenerado estable.Solución general:
ch(t) = α1eλ1tv1 + α2eλ2tv2 =
(α1 + α2a1e−(a1+a2)t
α1 − α2a2e−(a1+a2)t
),
donde α1, α2 ∈ R son constantes libres.

Ecuaciones Diferenciales Ordinarias 79 / 97
Ejemplos (respuestas & interpretaciones)
Dos depósitos: Respuestas & interpretación
Solución del PVI:
c1(t) =V1γ1 + V2γ2
V1 + V2+
V2(γ1 − γ2)
V1 + V2e−r(V1+V2)t/V1V2 ,
c2(t) =V1γ1 + V2γ2
V1 + V2+
V1(γ2 − γ1)
V1 + V2e−r(V1+V2)t/V1V2 .
Respuestas:1 Equilibrios: Concentraciones c0 tales que γ1 = γ2.2 limt→+∞ cj (t) = V1γ1+V2γ2
V1+V2, para j = 1,2.
3 La cantidad S(c1, c2) = V1c1 + V2c2 no varía, pues
S′ = (V1c1+V2c2)′ = V1c′1+V2c′2 = −rc1+rc2+rc1−rc2 ≡ 0.
Interpretación: Como el circuito es cerrado, ambasconcentraciones tienden a igualarse a la media ponderadade las concentraciones iniciales. Además, tendemosrápidamente al equilibrio si r(V1 + V2) V1V2.

Ecuaciones Diferenciales Ordinarias 80 / 97
Ejemplos (respuestas & interpretaciones)
Grandes Lagos: Respuestas
Modelo: El SLH a CC 5D c′ = Ac, donde A es una matriztriangular inferior cuyos elementos diagonales son
λ1 = − 3580
, λ2 = − 19590
, λ3 = − 225, λ4 = − 85
116, λ5 = − 33
131.
VAPs: Los cinco elementos diagonales.Estabilidad: Es un sistema atractor, pues todos sus VAPsson negativos.Respuestas:
1 Solo para c0 = 0 (agua sin contaminar).2 limt→+∞ c(t) = 0, independientemente de cuáles sean las
concentraciones iniciales, pues es un sistema atractor.3 134 años, suponiendo que el nivel de contaminación inicial
en los cinco lagos es el mismo.

Ecuaciones Diferenciales Ordinarias 81 / 97
Ejemplos (respuestas & interpretaciones)
Grandes Lagos: Gráfica & advertencia
Advertencia: s(134) ' s(0)/2, aunque 29002×15 ' 96,7.

Ecuaciones Diferenciales Ordinarias 82 / 97
Ejemplos (respuestas & interpretaciones)
Péndulo de Wilberforce: Simplificaciones & Modelo
Simplificaciones:1 No hay fricción: µ1 = µ2 = 0.2 Normalización: m = I = 1.3 Resonancia: ω0 = frecuencia natural =
√k1/m =
√k2/I.
4 Acoplamiento pequeño: ε2 < ω40 .
Modelo: El SLH a CC 4D x ′ = Ax , donde
x =
yzθΩ
, A =
0 1 0 0−ω2
0 0 ε 00 0 0 1ε 0 −ω2
0 0
.
Polinomio característico: QA(λ) = λ4 + 2ω20λ
2 + ω40 − ε2.

Ecuaciones Diferenciales Ordinarias 83 / 97
Ejemplos (respuestas & interpretaciones)
Péndulo de Wilberforce: VAPs & VEPs
Los VAPs de A son simples e imaginarios puros:
λ1 = σ+i, λ2 = −σ+i, λ3 = σ−i, λ4 = −σ−i,
dondeσ± =
√ω2
0 ± ε = ω0 + O(ε).
Los VEPs son
v1,2,3,4 =
1σ+i−1−σ+i
,
1−σ+i−1σ+i
,
1σ−i1σ−i
,
1−σ−i
1−σ−i
.

Ecuaciones Diferenciales Ordinarias 84 / 97
Ejemplos (respuestas & interpretaciones)
Péndulo de Wilberforce: Solución del PVI
Fijamos los valores iniciales
y(0) = 1, θ(0) = z(0) = Ω(0) = 0.
Al imponer que la combinación lineal
x(t) =4∑
j=1
cjeλj tv j
cumpla la condición inicial x(0) = (1,0,0,0)t , obtenemos
c1 = c2 = c3 = c4 = 1/4.

Ecuaciones Diferenciales Ordinarias 85 / 97
Ejemplos (respuestas & interpretaciones)
Péndulo de Wilberforce: Desplazamientos (1)
Por tanto, los desplazamientos vertical y torsional son
y(t) = (eiσ+t + e−iσ+t + eiσ−t + e−iσ−t )/4= [cos(σ−t) + cos(σ+t)] /2= cos(ωt) cos(νt)
θ(t) = (−eiσ+t − e−iσ+t + eiσ−t + e−iσ−t )/4= [cos(σ−t)− cos(σ+t)] /2= sin(ωt) sin(νt),
donde ω =σ+ + σ−
2= ω0 + O(ε) y ν =
σ+ − σ−2
= O(ε). Esdecir, ω es casi la frecuencia natural, mientras que ν es lafrecuencia de una oscilación lenta (similar al batimiento).

Ecuaciones Diferenciales Ordinarias 86 / 97
Ejemplos (respuestas & interpretaciones)
Péndulo de Wilberforce: Desplazamientos (2)
Periodo de la oscilación rápida: 2πω ' 2π.
Periodo de la oscilación lenta: 2πν ' 251.

Ecuaciones Diferenciales Ordinarias 87 / 97
Ejemplos (respuestas & interpretaciones)
Péndulo de Wilberforce: Conservación de la energía
La energía mecánica total del péndulo de Wilberforce es
E(y , z, θ,Ω) =m2
z2 +k1
2y2︸ ︷︷ ︸
modo vertical
+I2
Ω2 +k2
2θ2︸ ︷︷ ︸
modo torsional
− εyθ︸︷︷︸acopl.
.
La energía mecánica se conserva:
dEdt
= mzz′ + k1yy ′ + IΩΩ′ + k2θθ′ − εy ′θ − εyθ′
= z(−k1y + εθ) + k1yz + Ω(−k2θ + εy) + k2θΩ− εzθ − εyΩ ≡ 0.
Cuando la energía del modo vertical es grande/pequeña,la energía del modo torsional es pequeña/grande.La energía de acoplamiento siempre es pequeña.

Ecuaciones Diferenciales Ordinarias 88 / 97
Ejemplos (respuestas & interpretaciones)
Péndulo de Wilberforce: Transferencia de energía

Ecuaciones Diferenciales Ordinarias 89 / 97
Ejemplos (respuestas & interpretaciones)
Péndulo simple sin fricción: Conservación de energía
Modelo: θ′′ = −c sin θ, con c = g/l > 0.ω = θ′ = velocidad angular.
SNLA 2D:θ′ = ωω′ = −c sin θ
Energía mecánica total:
E(θ, ω) = ml2ω2/2 + mgl(1− cos θ).
La energía mecánica es una cantidad conservada:
dEdt
= ml2ωω′+ mglθ′ sin θ = −mglω sin θ+ mglω sin θ ≡ 0.
Es un SHA con Hamiltoniano H(θ, ω) = E(θ, ω)/ml2.

Ecuaciones Diferenciales Ordinarias 90 / 97
Ejemplos (respuestas & interpretaciones)
Péndulo simple sin fricción: Equilibrios
Posiciones de equilibrio: (θ, ω) = (kπ,0) con k ∈ Z, dondek par posición de equilibrio inferior,k impar posición de equilibrio superior.
Matriz del sistema linealizado:
Ak =
(0 1
(−1)k+1c 0
)=
(
0 1−c 0
)si k es par,(
0 1c 0
)si k es impar.
Energías de los equilibrios:
E(kπ,0) = mgl(
1− (−1)k)
=
0 si k es par,2mgl si k es impar.

Ecuaciones Diferenciales Ordinarias 91 / 97
Ejemplos (respuestas & interpretaciones)
Péndulo simple sin fricción: Estabilidad
Posición de equilibrio superior: Inestable, pues si k esimpar, entonces det[Ak ] = −g/l < 0 y (kπ,0) es una sillano lineal.Posición de equilibrio superior: Estable, pues si k es par,los VAPs de Ak son imaginarios puros:
λ± = ±βi, β =√
g/l
y se conserva la energía, luego (kπ,0) es un centro nolineal.Periodo de las pequeñas oscilaciones:
limθ0→0
P(θ0) = 2π/β = 2π√
l/g.

Ecuaciones Diferenciales Ordinarias 92 / 97
Ejemplos (respuestas & interpretaciones)
Péndulo simple sin fricción: Curvas de nivel
Curvas de nivel:
E(θ, ω) = ml2ω2/2 + mgl(1− cos θ) = ctte.
Separatriz: Es la curva de nivel que contiene a las sillas nolineales, luego tiene la forma
E(θ, ω) = 2mgl ⇔ ω = ±2√
g/l cos(θ/2).
Sentido de las trayectorias: Se recorren hacia laderecha/izquierda mientras están en el semiplanosuperior/inferior, pues θ′ = ω.

Ecuaciones Diferenciales Ordinarias 93 / 97
Ejemplos (respuestas & interpretaciones)
Péndulo simple sin fricción: Retrato de fase

Ecuaciones Diferenciales Ordinarias 94 / 97
Ejemplos (respuestas & interpretaciones)
Pescando platelmintos: Equilibrio
Sea C = (x , y) ∈ R2 : y2 = x(r − x) la circunferencia deradio r/2 y centro (r/2,0).Puntos de equilibrio: Son las soluciones del sistema ωy0 = v(r−x0)√
(r−x0)2+y20
ωx0 = vy0√(r−x0)2+y2
0
Dividiendo las dos ecuaciones vemos que y20 = x0(r − x0).
Es decir, (x0, y0) ∈ C.Usando ahora la primera ecuación, se deduce que
x0 = v2/ω2r y0 = +√
x0(r − x0) = v√ω2r2 − v2/ω2r .
La solución y0 = −√
x0(r − x0) no es válida pues laprimera ecuación implica que y0 > 0.

Ecuaciones Diferenciales Ordinarias 95 / 97
Ejemplos (respuestas & interpretaciones)
Pescando platelmintos: Sistema linealizado
Si A =
(a bc d
)es la matriz del sistema linealizado, entonces
a =∂x ′
∂x(x0, y0) =
−y20 v(
(r − x0)2 + y20
)3/2 =−x0v
r 3/2√
r − x0=
−v3
ωr 2√ω2r 2 − v2
b =∂x ′
∂y(x0, y0) = −ω − (r − x0)y0v(
(r − x0)2 + y20
)3/2 = −ω − v√
x0
r 3/2 = −ω − v2
ωr 2
c =∂y ′
∂x(x0, y0) = ω − (r − x0)y0v(
(r − x0)2 + y20
)3/2 = ω − v√
x0
r 3/2 = ω − v2
ωr 2
d =∂y ′
∂y(x0, y0) =
−(r − x0)2v((r − x0)2 + y2
0
)3/2 =−v√
r − x0
r 3/2 =−v√ω2r 2 − v2
ωr 2 .
La traza T , el determinante D y el discriminante ∆ son:
T = − vω√ω2r 2 − v2
< 0, D = ω2 > 0, ∆ =(5v2 − 4r 2ω2)ω2
ω2r 2 − v2 .

Ecuaciones Diferenciales Ordinarias 96 / 97
Ejemplos (respuestas & interpretaciones)
Pescando platelmintos: Estabilidad & clasificación
T ,D > 0⇒ El sistema linealizado es atractor.∆ = 0⇔ v = v? := 2ωr/
√5.
El sistema linealizado es:Un foco atractor cuando 0 < v < v?.Un nodo impropio atractor cuando v = v?.Un nodo propio atractor cuando v? < v < ωr .
Se puede probar que (x0, y0) es un atractor global.La derivada temporal de V (x , y) = (x2 + y2)/2 es
dVdt
=v(x(r − x)− y2)√(r − x)2 + y2
< 0 en el exterior de C,= 0 sobre C,> 0 en el interior de C.
Si el platelminto está dentro/fuera de la circunferencia C,entonces se aleja del/acerca al centro de la cuba.

Ecuaciones Diferenciales Ordinarias 97 / 97
Ejemplos (respuestas & interpretaciones)
Sistemas conservativos con 1 grado de libertad
Una partícula de masa uno se desplaza sin fricción sobreuna recta bajo la acción de una fuerza conservativa queproviene de un potencial U(x).x = posición y v = x ′ = velocidad.Fuerza conservativa: F (x) = −dU
dx (x).
2a ley de Newton: x ′′ = F (x) = −dUdx (x).
H(x , v) = v2/2 + U(x) = energía mecánica total.Modelo: El SHA con un grado de libertad
x ′ = vv ′ = −dU
dx (x)
Ejemplo: U(x) = 1− cos x es el potencial del péndulosimple con m = g = l = 1.