Embed Size (px)
Citation preview

力覚フィードバックを用いた人とロボット間の遠隔協調の
安定化と高品質化
星城大学 名古屋工業大学
黄 平国 石橋 豊
2019年3月19日 早稲田大学・西早稲田キャンパス2019年電子情報通信学会総合大会

発表内容
背景
研究目的
力覚フィードバックを用いた遠隔ロボットシ
ステム
安定化と高品質化の取り組みと成果
・安定化
・高品質化
結論と今後の課題

背景 遠隔⼿術や遠隔教育など様々な分野で⼒覚メディアが使⽤ ネットワークを介すことにより,遠隔で⾏う作業の効率や
精度が改善の期待
ユーザ体感品質(QoE︓ Quality of
Experience)の劣化、不安定現象の発⽣
ネットワーク遅延やその揺らぎ、
パケット⽋落QoS(Quality of Service)保証のないネットワークを介して⼒覚メディアを伝送
⼒覚を⽤いたバイラテラル遠隔ロボットシステム

⽬的
⾼安定・⾼品質・⾼精度な遠隔ロボットシステムのバイラテラル制御を実現
ロボット・制御⼯学の分野で研究されてきている安定性を確保する制御
通信・ネットワーク⼯学の分野における⾼いサービス品質(QoS)を維持するQoS制御
融合・発展

本研究⼒覚フィードバックを⽤いた遠隔ロボットシステムを対象
安定化と高品質化を実現するための取り組み:
1)安定化︓安定化制御を提案し、効果を検証
2)⾼品質︓⾼効率なQoS制御を実現するための知覚特性評価

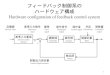
力覚フィードバックを用いた遠隔ロボットシステム

産業⽤ロボットの外観

ロボットの位置の決定方法*1 K. Suzuki et al., Proc. IEEE GCCE, Oct. 2015.
8/26

反力の計算方法*1 K. Suzuki et al., Proc. IEEE GCCE, Oct. 2015.
9/26

安定化と高品質化の取り組み
前述の力覚フィードバックを用いた遠隔ロボットシステムを一つまたは二つ利用
人とロボット間(人-人, 人-ロボット, ロボット-ロボット間)の遠隔協調の安定化と高品質化に取り組む.安定化:フィルタによる安定化制御、粘性による
安定化制御、衝突時反力制御、切り替え制御
高品質化:力の方向に対する人の知覚特性を調査、
ロボット位置の追従制御、力情報を用いた
ロボット位置制御
協調作業として, ボールを押す作業, 物体を手渡したり一緒に運んだりする作業などを対象

安定化に関する取り組み

ウェーブフィルタ
位相制御フィルタ
フィルタによる安定化制御(1/2)
12/26

フィルタによる安定化制御(2/2)
ウェーブフィルタ
位相制御フィルタ
位相制御フィルタでゲインを落とすことにより,
fsからxrへの,xmからfmへの位相遅れを改善
いかなる通信遅延に対しても,力学的閉ループの安定性を保証
13/26

評価システム
ネットワークエミュレータ

評価⽅法
産業⽤ロボットアームに取り付けられた⾦属棒でボール(ゴムボール)を押し込む作業
簡単のため、産業⽤ロボットアームを垂直⽅向のみに動くように設定(1軸で動作)
ネットワークエミュレータで固定遅延を発⽣
産業⽤ロボットと触覚インタフェース装置の作業空間と⼒の違いの吸収
作業空間(Robot : Geomagic)
⼒(Robot : Geomagic)
1 : 1 1 : 1作業範囲を限定 最⼤提⽰反⼒を3.3Nに限定

評価結果(1/2)安定化⼿法を⽤いない場合ネットワーク遅延︓ 0ms
システムが不安定になり、産業⽤ロボットと触覚インタフェース装置の位置と⼒が⼤きく振動
デモビデオ

評価結果(2/2)安定化⼿法を⽤いる場合ネットワーク遅延︓ 0ms
位置︓産業⽤ロボットと触覚インタフェース装置の位置がほぼ⼀致⼒︓ロボットの⼒が急速に変化、触覚インタフェース装置へ出⼒される⼒は緩やかに変化
デモビデオ

問題点
[1] 黄平国, 三好孝典, 石橋豊, “遠隔ロボットシステムにおけるバイラテラル制御の安定化,” 信学技報, CQ2016-125, Mar. 2017.

改善手法

評価方法

評価結果(1/2)

評価結果(2/2)

23/26


評価結果(1/2)

評価結果(2/2)

27/26

評価方法
一つの力覚フィードバックを用いた遠隔ロボットシステムを利用
作業では、被験者はビデオを見ながら触覚インタフェース装置
によって産業用ロボットを操作し、金属棒でボール(硬い物体で
ある硬式テニスボール)を押す
衝突時半力制御を用いる場合と用いない場合の二通りを扱う
力のマッピング比率
産業用ロボット:触覚インタフェース装置=2:1 (Kscale =0.5)産業用ロボット:触覚インタフェース装置=1:1 (Kscale =1.0)
空間のマッピング比率:
産業用ロボット:触覚インタフェース装置=1:1

評価結果(1/2)

評価結果(2/2)

切り替え制御
作業対象である物体の硬さを判定し, その硬さに応じて
粘性による安定化制御と衝突時反力制御を切り替える
・柔らかい物体:粘性による安定化制御
・硬い物体:衝突時反力制御

評価方法
一つの力覚フィードバックを用いた遠隔ロボットシステムを利用
作業では、被験者はビデオを見ながら触覚インタフェース装置
によって産業用ロボットを操作し、金属棒でボール(柔らかい物
体であるソフトテニスボールと硬い物体である硬式テニスボール
)を押す
各被験者はそれぞれのボールに対して10秒間で5回を押す
三種類の制御を扱う
粘性による安定化制御、衝突時反力制御、切り替え制御

評価結果(1/2)

評価結果(2/2)

高品質化に関する取り組み
力の方向に対する人の知覚特性を調査
ロボット位置の追従制御
力情報を用いたロボット位置制御
時間の関係上、割愛

力の方向の知覚特性
力覚を用いた遠隔ロボットシステムを二つ用いて、
触覚インタフェース装置によって、人がどの程度ま
で正確に力の方向を知覚することができるかを実
験により調査
36/26

評価システムの構成
37/26

評価方法(1/2)
38/26

評価方法(2/2)
39/26

評価結果(1/2)
40/26

評価結果(2/2)
41/26

結論
力覚フィードバックを用いた遠隔ロボットシステムを扱い, 人とロボ
ット間の遠隔協調の安定化と高品質化を実現するための著者らの
取り組みとその成果を紹介
安定化を実現するために, フィルタによる安定化制御の効果を
調べる他, 粘性による安定化制御, 衝突時反力制御を提案し, その効果を検証した
高品質化を実現するために,力の方向に対する人の知覚特性を
QoE評価により明らかにした。QoS制御として, ロボット位置の
追従制御, 力情報を用いたロボット位置制御などを提案し, それ
らの効果を検証した

今後の課題
安定化制御とQoS制御を統合的に考えることが
必要
力覚フィードバック制御にAIを適用するなどによ
って, 人とロボット間の遠隔協調を高度化するこ
とが重要


補助資料(4種類の制御の比較)

評価方法(1/2)

評価方法(2/2)

評価結果(1/4)

評価結果(2/4)

評価結果(3/4)

評価結果(4/4)

比較のまとめ