Embed Size (px)
Citation preview
Excellence in Automotive R&D
Hybrid Electric Vehicles
Development Processes & Challenges
Dr. Olivier Imberdis, IAV France
12th SIA – CNAM Conferences Serie, March 8th 2011
© IAV GmbH · 03/2011 · IAV-France · IAV_SIA_Presentation.ppt 2
Content
• Driving forces for alternative drive trains
• Classification & Potentials of HEV
• Impact on development processes
• Outlook
• Simulation as a continuous development tool
© IAV GmbH · 03/2011 · IAV-France · IAV_SIA_Presentation.ppt 3
Content
• Driving forces for alternative drive trains
• Classification & Potentials of HEV
• Impact on development processes
• Outlook
• Simulation as a continuous development tool
© IAV GmbH · 03/2011 · IAV-France · IAV_SIA_Presentation.ppt 4
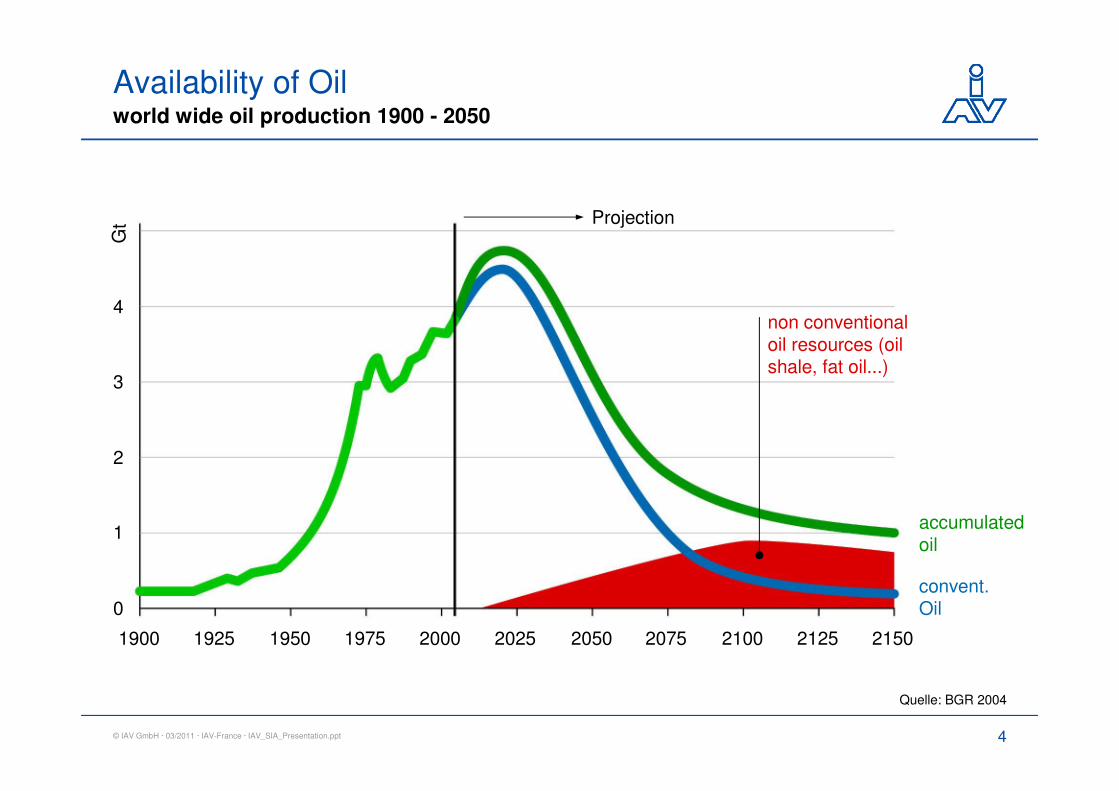
Availability of Oilworld wide oil production 1900 - 2050
Quelle: BGR 2004
accumulatedoil
convent. Oil
Projection
non conventionaloil resources (oilshale, fat oil...)
1900 1925 1950 1975 2000 2025 2050 2075 2100 2125 2150
0
1
2
3
4
Gt
© IAV GmbH · 03/2011 · IAV-France · IAV_SIA_Presentation.ppt 5
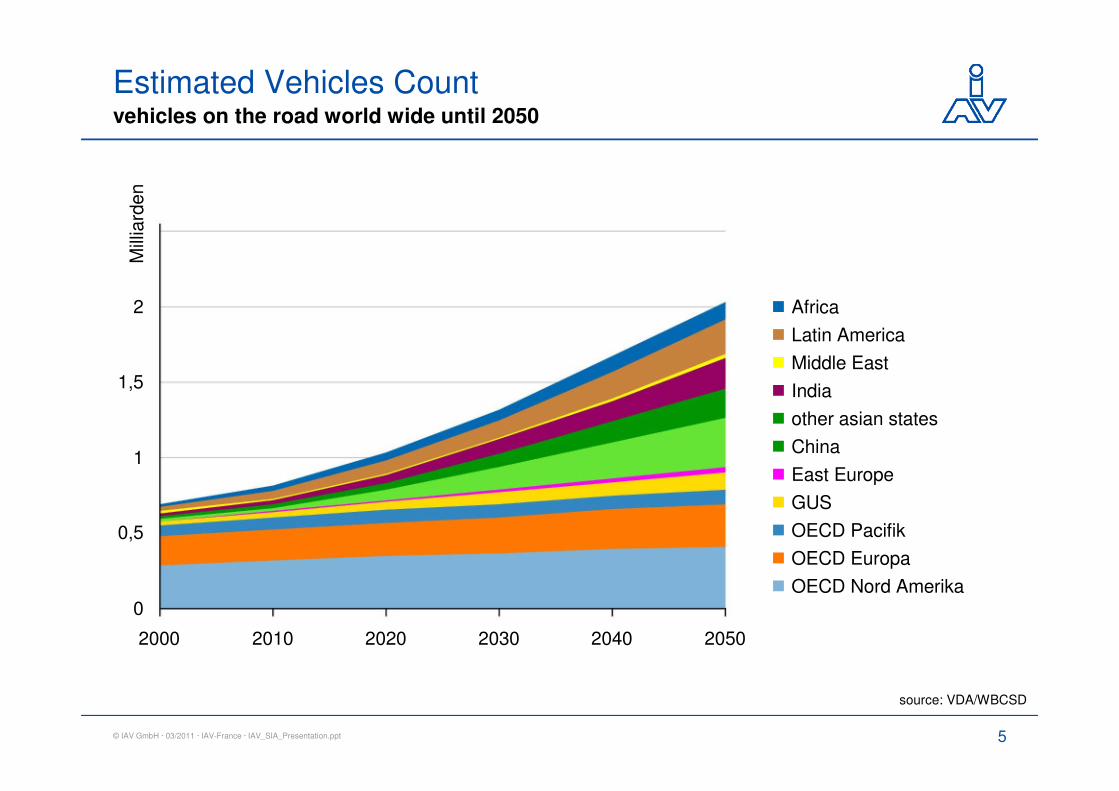
Estimated Vehicles Countvehicles on the road world wide until 2050
� Africa
� Latin America
� Middle East
� India
� other asian states
� China
� East Europe
� GUS
� OECD Pacifik
� OECD Europa
� OECD Nord Amerika
source: VDA/WBCSD
0
0,5
1
1,5
2
Mill
iard
en
2000 2010 2020 2030 2040 2050
© IAV GmbH · 03/2011 · IAV-France · IAV_SIA_Presentation.ppt 6
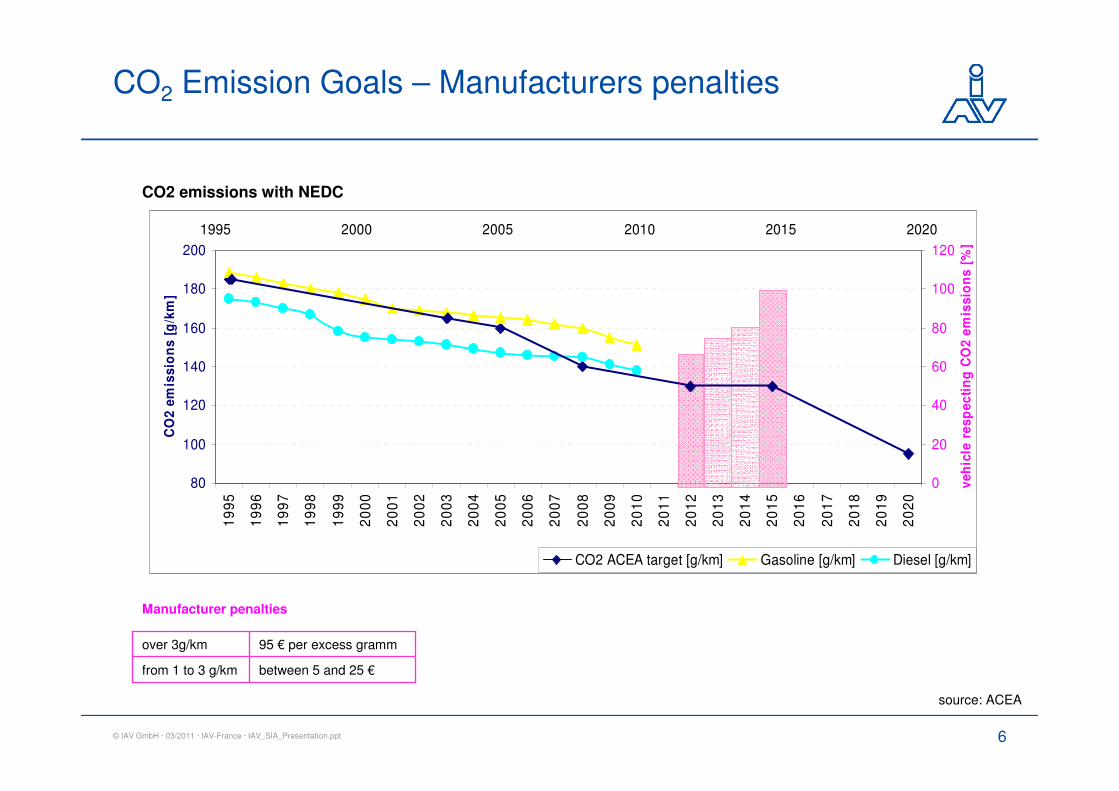
CO2 Emission Goals – Manufacturers penalties
between 5 and 25 €from 1 to 3 g/km
95 € per excess grammover 3g/km
Manufacturer penalties
CO2 emissions with NEDC
80
100
120
140
160
180
200
19
95
19
96
19
97
19
98
19
99
20
00
20
01
20
02
20
03
20
04
20
05
20
06
20
07
20
08
20
09
20
10
20
11
20
12
20
13
20
14
20
15
20
16
20
17
20
18
20
19
20
20
CO
2 e
mis
sio
ns
[g
/km
]
0
20
40
60
80
100
120
1995 2000 2005 2010 2015 2020
ve
hic
le r
es
pe
cti
ng
CO
2 e
mis
sio
ns
[%
]
CO2 ACEA target [g/km] Gasoline [g/km] Diesel [g/km]
source: ACEA
© IAV GmbH · 03/2011 · IAV-France · IAV_SIA_Presentation.ppt 7
Content
• Driving forces for alternative drive trains
• Classification & Potentials of HEV
• Impact on development processes
• Outlook
• Simulation as a continuous development tool
© IAV GmbH · 03/2011 · IAV-France · IAV_SIA_Presentation.ppt 8
Classification & PotentialsHybrid Systems Introduction
Classification
Potentials of HEV
... According to Topology
... Gasoline and Diesel
... Fuel Efficiency
... According to Powertrain Functionality
© IAV GmbH · 03/2011 · IAV-France · IAV_SIA_Presentation.ppt 9
Classification & PotentialsHybrid Systems Introduction
Classification
Potentials of HEV
... According to Topology
... Gasoline and Diesel
... Fuel Efficiency
... According to Powertrain Functionality
© IAV GmbH · 03/2011 · IAV-France · IAV_SIA_Presentation.ppt 10
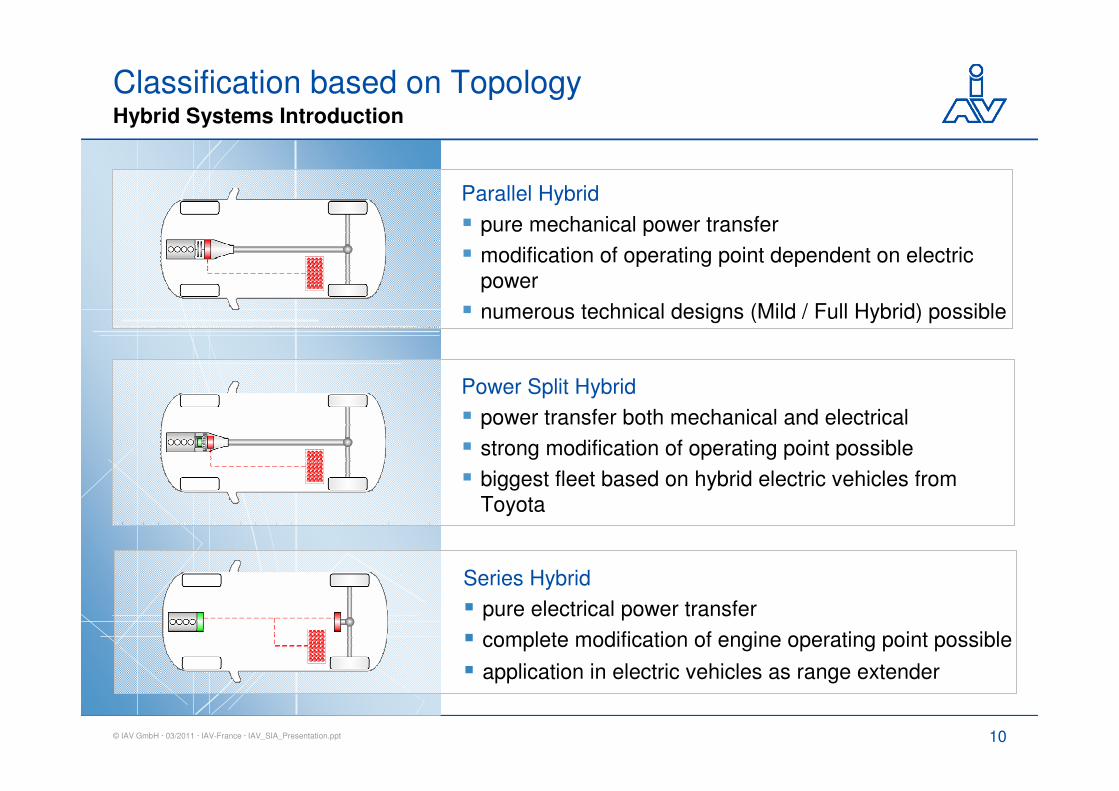
Parallel Hybrid
� pure mechanical power transfer
� modification of operating point dependent on electric
power
� numerous technical designs (Mild / Full Hybrid) possible
Power Split Hybrid
� power transfer both mechanical and electrical
� strong modification of operating point possible
� biggest fleet based on hybrid electric vehicles from
Toyota
Series Hybrid
� pure electrical power transfer
� complete modification of engine operating point possible
� application in electric vehicles as range extender
Classification based on TopologyHybrid Systems Introduction
© IAV GmbH · 03/2011 · IAV-France · IAV_SIA_Presentation.ppt 11
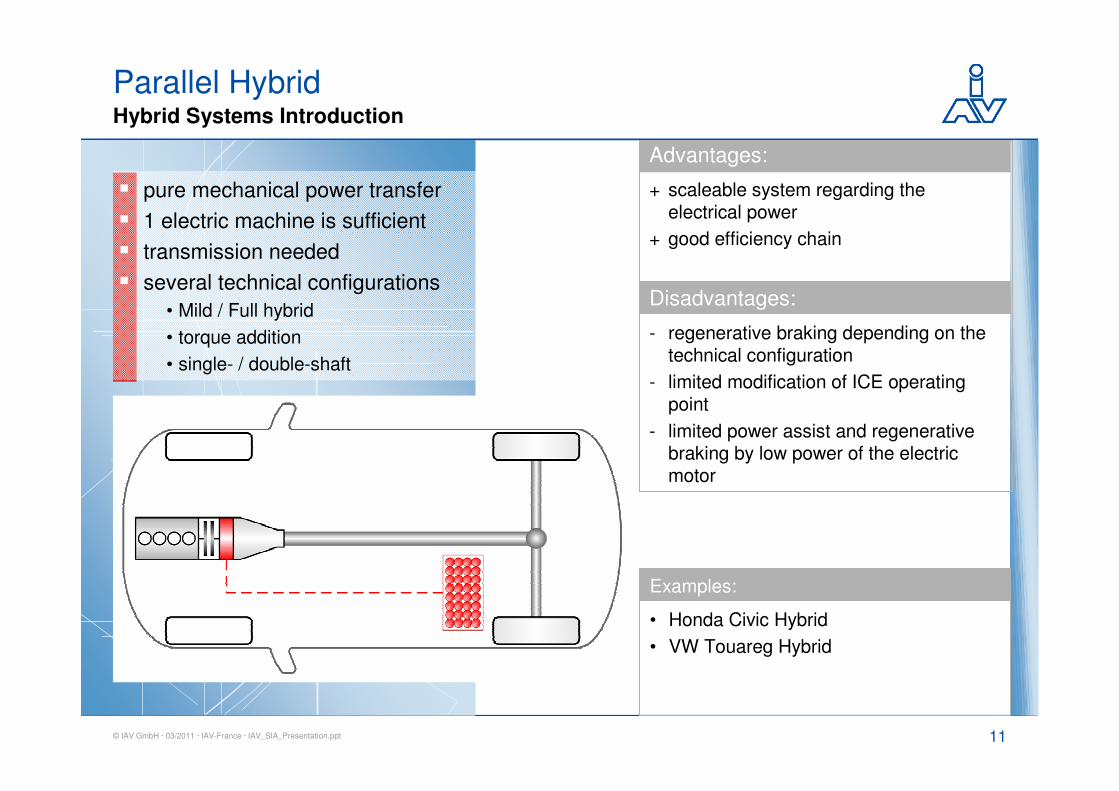
Parallel HybridHybrid Systems Introduction
� pure mechanical power transfer
� 1 electric machine is sufficient
� transmission needed
� several technical configurations
• Mild / Full hybrid
• torque addition
• single- / double-shaft
Advantages:
+ scaleable system regarding the electrical power
+ good efficiency chain
Disadvantages:
- regenerative braking depending on the technical configuration
- limited modification of ICE operating point
- limited power assist and regenerative braking by low power of the electric motor
Examples:
• Honda Civic Hybrid
• VW Touareg Hybrid
© IAV GmbH · 03/2011 · IAV-France · IAV_SIA_Presentation.ppt 12
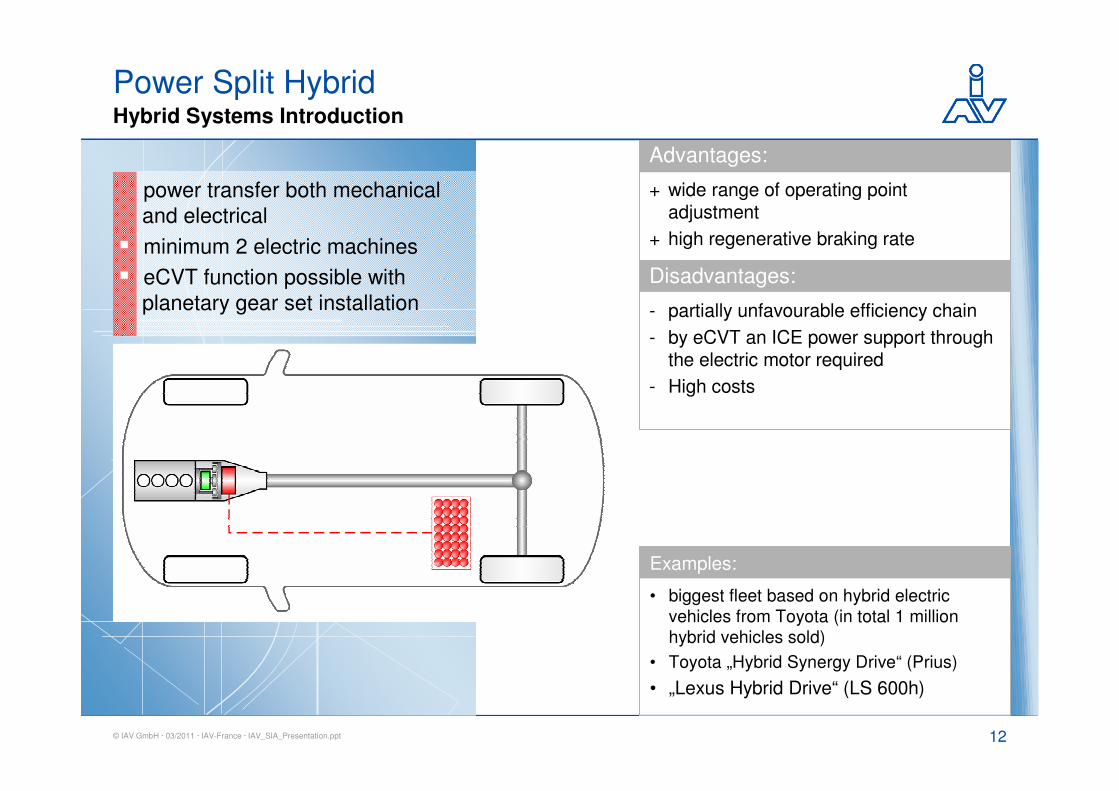
Power Split HybridHybrid Systems Introduction
power transfer both mechanical
and electrical
� minimum 2 electric machines
� eCVT function possible with
planetary gear set installation
Advantages:
+ wide range of operating point adjustment
+ high regenerative braking rate
Disadvantages:
- partially unfavourable efficiency chain
- by eCVT an ICE power support through the electric motor required
- High costs
Examples:
• biggest fleet based on hybrid electric
vehicles from Toyota (in total 1 million
hybrid vehicles sold)
• Toyota „Hybrid Synergy Drive“ (Prius)
• „Lexus Hybrid Drive“ (LS 600h)
© IAV GmbH · 03/2011 · IAV-France · IAV_SIA_Presentation.ppt 13
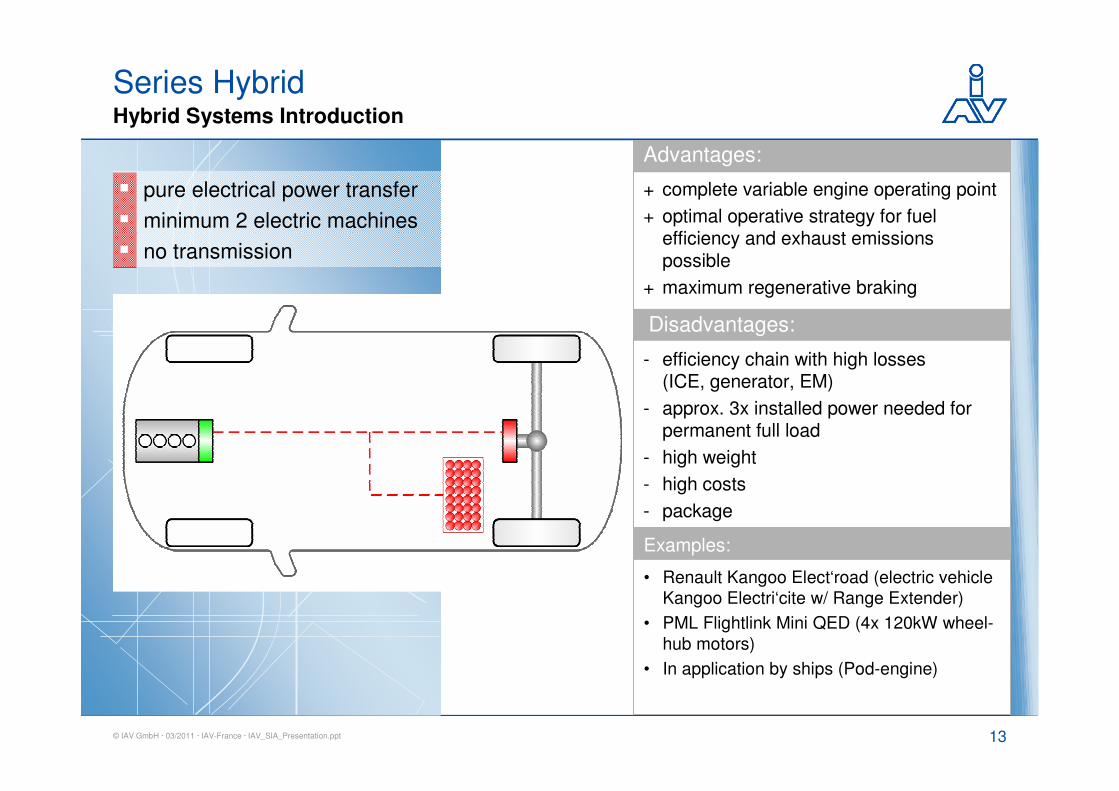
Series HybridHybrid Systems Introduction
� pure electrical power transfer
� minimum 2 electric machines
� no transmission
Advantages:
+ complete variable engine operating point
+ optimal operative strategy for fuel efficiency and exhaust emissions possible
+ maximum regenerative braking
Disadvantages:
- efficiency chain with high losses(ICE, generator, EM)
- approx. 3x installed power needed for permanent full load
- high weight
- high costs
- package
Examples:
• Renault Kangoo Elect‘road (electric vehicle
Kangoo Electri‘cite w/ Range Extender)
• PML Flightlink Mini QED (4x 120kW wheel-
hub motors)
• In application by ships (Pod-engine)
© IAV GmbH · 03/2011 · IAV-France · IAV_SIA_Presentation.ppt 14
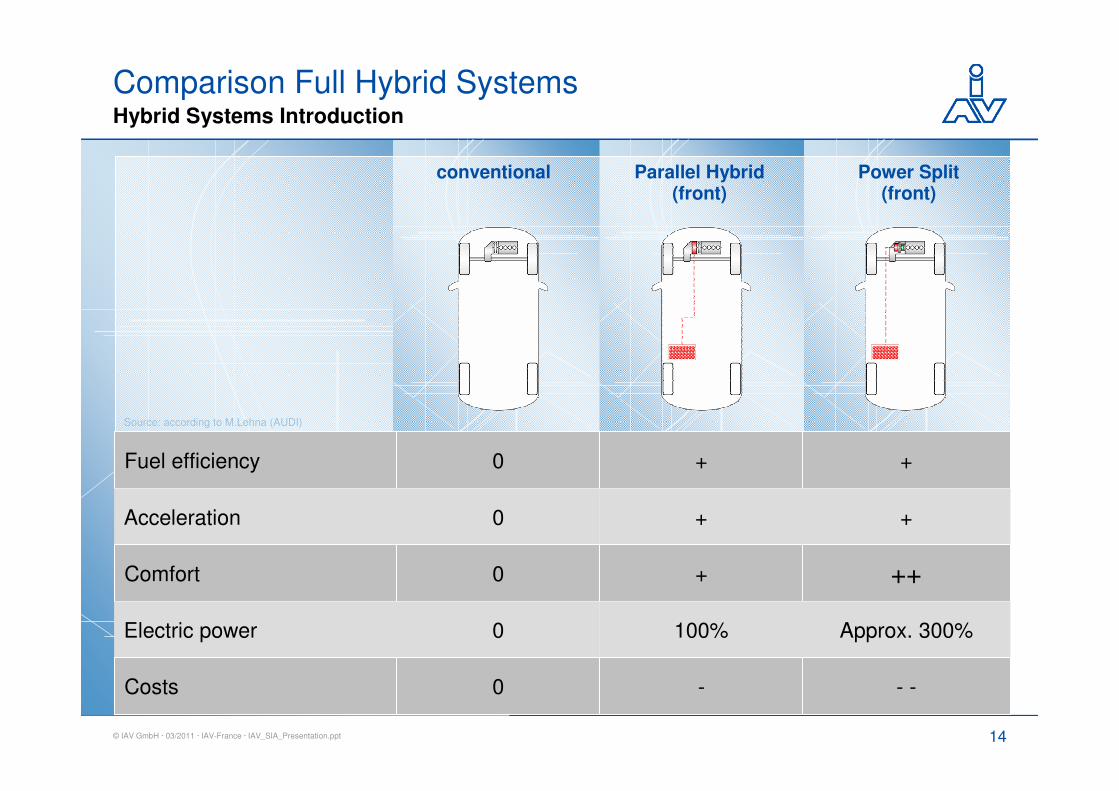
Power Split(front)
Parallel Hybrid(front)
conventional
Fuel efficiency 0 + +
Acceleration 0 + +
Comfort 0 + ++
Electric power 0 100% Approx. 300%
Costs 0 - - -
Source: according to M.Lehna (AUDI)
Comparison Full Hybrid SystemsHybrid Systems Introduction
© IAV GmbH · 03/2011 · IAV-France · IAV_SIA_Presentation.ppt 15
Classification & PotentialsHybrid Systems Introduction
Classification
Potentials of HEV
... According to Topology
... Gasoline and Diesel
... Fuel Efficiency
... According to Powertrain Functionality
© IAV GmbH · 03/2011 · IAV-France · IAV_SIA_Presentation.ppt 16
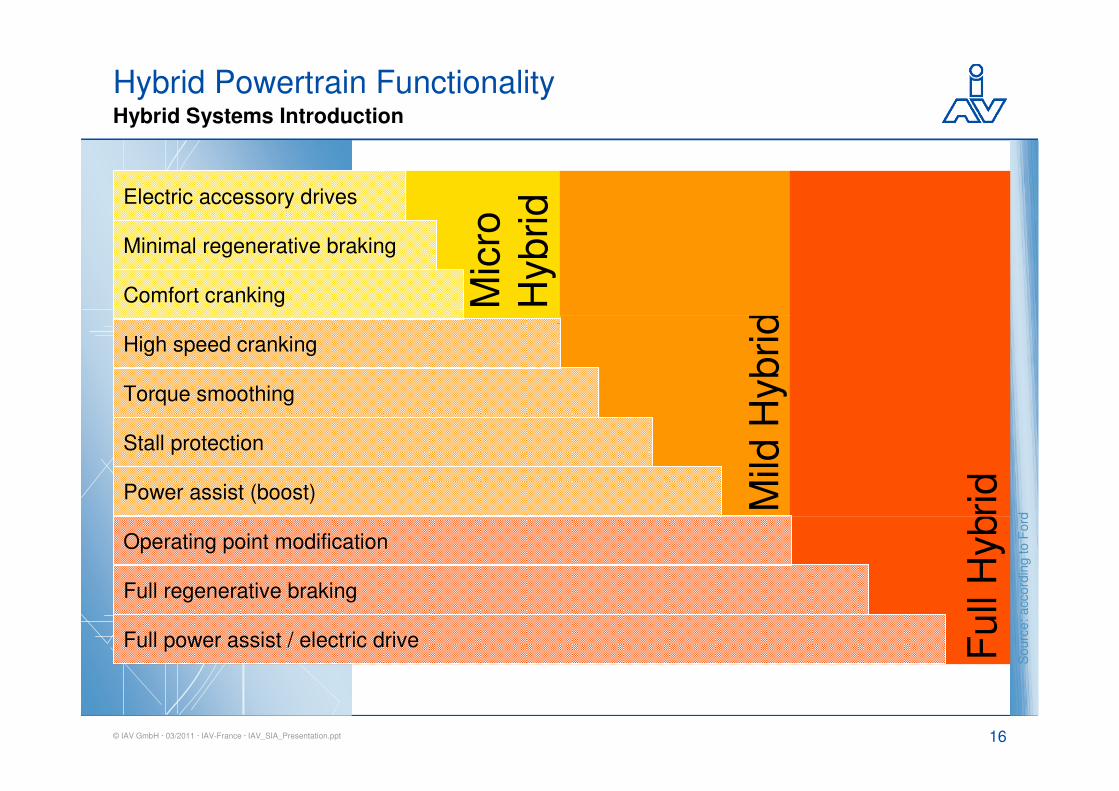
Hybrid Powertrain FunctionalityHybrid Systems Introduction
Sourc
e: accord
ing to F
ord
Full
Hybrid
Mild
Hybrid
Mic
ro
Hybrid
rid
Full regenerative braking
Power assist (boost)
Stall protection
Torque smoothing
High speed cranking
Comfort cranking
Minimal regenerative braking
Electric accessory drives
Full power assist / electric drive
Operating point modification
© IAV GmbH · 03/2011 · IAV-France · IAV_SIA_Presentation.ppt 17
Classification & PotentialsHybrid Systems Introduction
Hybrid Systems
Potentials of HEV
... According to Topology
... Gasoline and Diesel
... Fuel Efficiency
... According to Powertrain Functionality
© IAV GmbH · 03/2011 · IAV-France · IAV_SIA_Presentation.ppt 18
Comfort / Safety
PotentialsHybrid Systems Introduction
Extended Dynamics
Environment
� Increase in driving dynamics through boost function
� Torque Vectoring / enhanced heavy terrain drivability
� Fuel efficiency, reduced CO2 emissions
� Improved NVH behaviour
� Zero-emission and driving in congested areas
� Increase of HVAC comfort (A/C by standstill)
� Reduced NVH emissions
� Off-board-supply of electrical devices
� Active support of vehicle stability control systems (electric braking, torque vectoring)
© IAV GmbH · 03/2011 · IAV-France · IAV_SIA_Presentation.ppt 19
PotentialsHybrid Systems Introduction
� Development and integration of new components and technologies for the automobile industry
� Electric motors, batteries, power electronics, etc.
� Innovative cross-linked powertrain control strategies
� Further development of the conventional gasoline and diesel ICE (downsizing, selective operating points)
� Energy management
� On-demand control of the accessory drives through electrification
� Efficiency improvement of the electric power generation for the electric loads
� Realisation of 4WD without transfer gear, differential, drive shafts (e4WD)
Technology / Innovation
© IAV GmbH · 03/2011 · IAV-France · IAV_SIA_Presentation.ppt 20
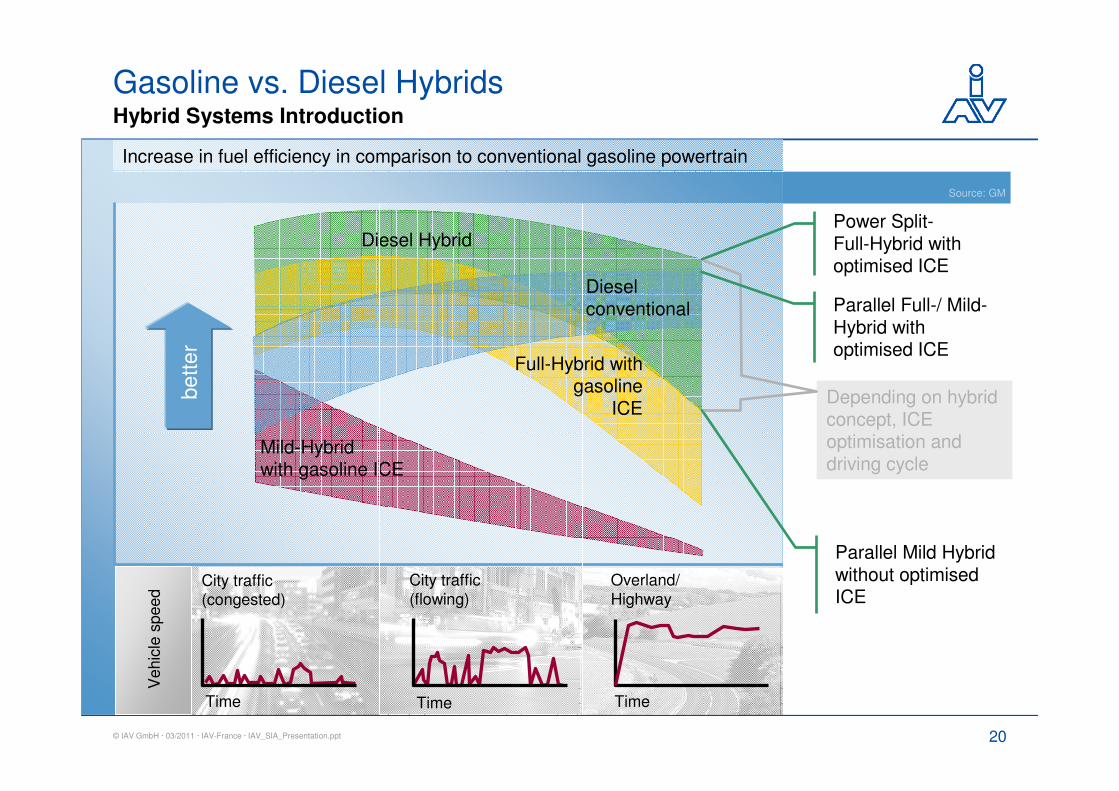
City traffic(congested)
City traffic(flowing)
Overland/Highway
Gasoline vs. Diesel HybridsHybrid Systems Introduction
Increase in fuel efficiency in comparison to conventional gasoline powertrain
Source: GMb
ett
er
Diesel Hybrid
Dieselconventional
Mild-Hybridwith gasoline ICE
Ve
hic
le s
peed
Time Time Time
Full-Hybrid with gasoline
ICE
Power Split-Full-Hybrid with optimised ICE
Parallel Mild Hybridwithout optimised ICE
Depending on hybrid concept, ICE optimisation and driving cycle
Parallel Full-/ Mild-Hybrid with optimised ICE
© IAV GmbH · 03/2011 · IAV-France · IAV_SIA_Presentation.ppt 21
Content
• Driving forces for alternative drive trains
• Classification & Potentials of HEV
• Impact on development processes
• Outlook
• Simulation as a continuous development tool
© IAV GmbH · 03/2011 · IAV-France · IAV_SIA_Presentation.ppt 22
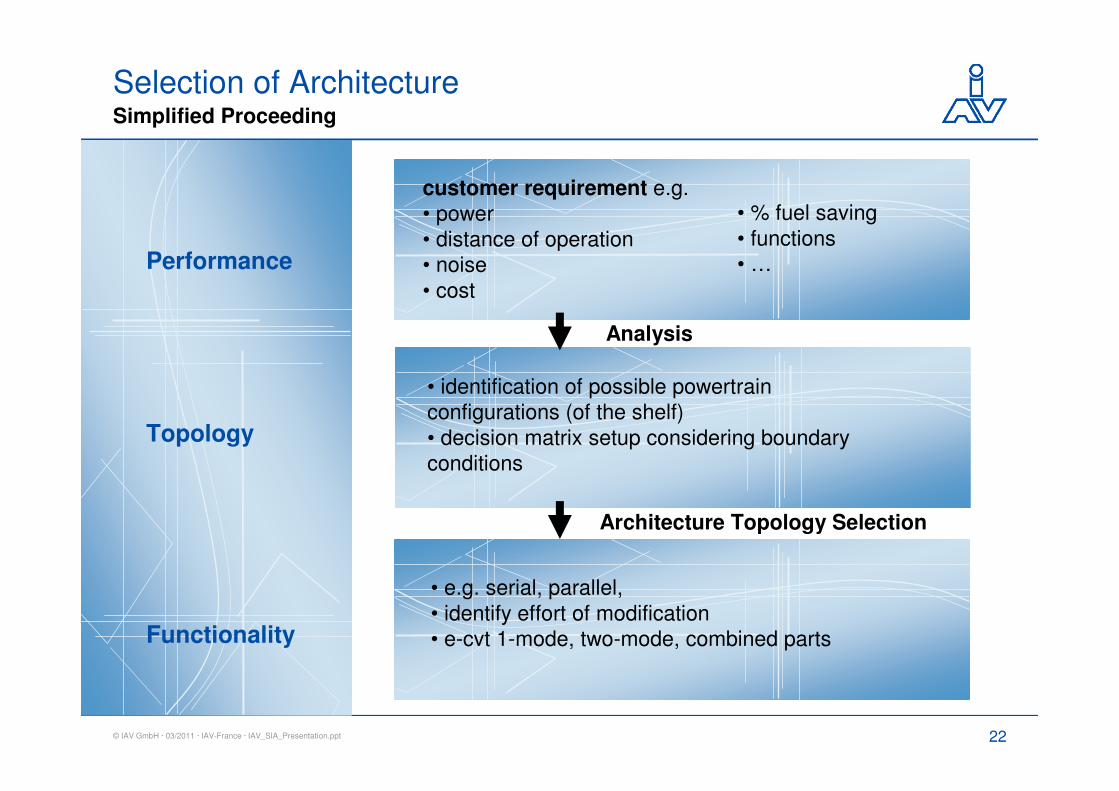
Selection of ArchitectureSimplified Proceeding
IAV analysis
Architecture Topology Selection
customer requirement e.g.
• power
• distance of operation
• noise
• cost
• identification of possible powertrain
configurations (of the shelf)
• decision matrix setup considering boundary
conditions
• e.g. serial, parallel,
• identify effort of modification
• e-cvt 1-mode, two-mode, combined parts
Performance
Topology
Functionality
Analysis
• % fuel saving
• functions
• …
© IAV GmbH · 03/2011 · IAV-France · IAV_SIA_Presentation.ppt 23
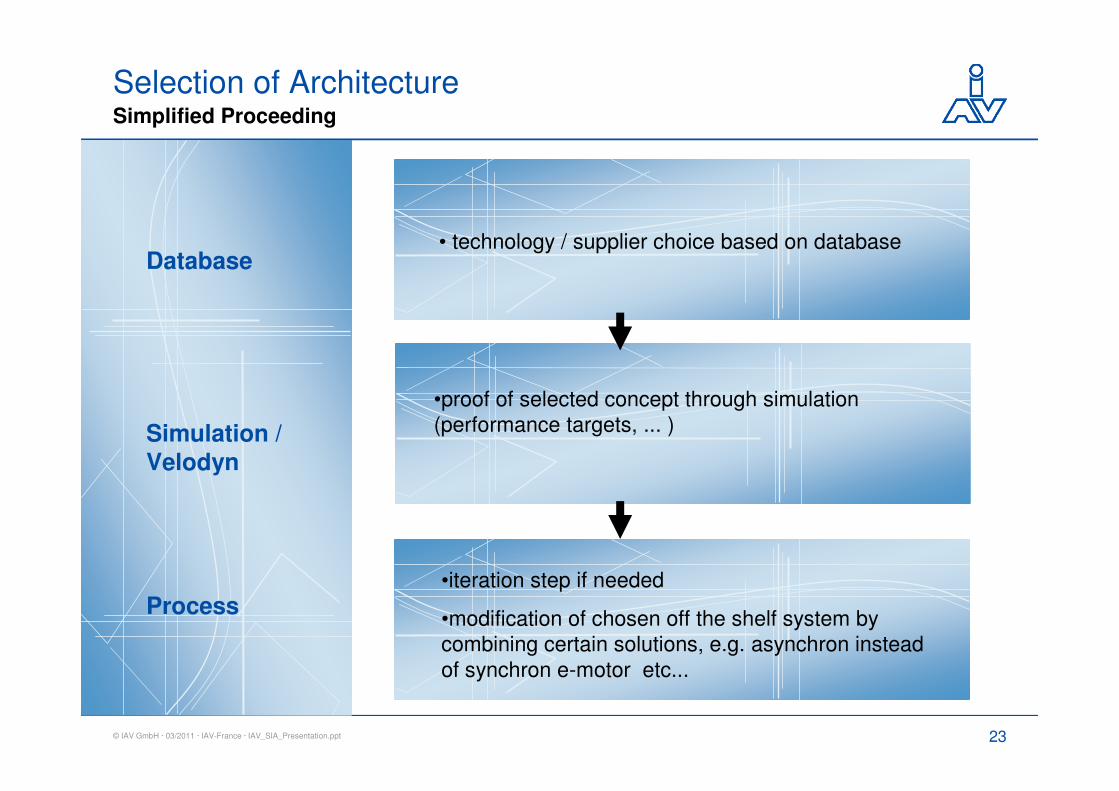
Selection of ArchitectureSimplified Proceeding
IAV analysis
Database
Simulation / Velodyn
Process
• technology / supplier choice based on database
•proof of selected concept through simulation
(performance targets, ... )
•iteration step if needed
•modification of chosen off the shelf system by
combining certain solutions, e.g. asynchron instead
of synchron e-motor etc...
© IAV GmbH · 03/2011 · IAV-France · IAV_SIA_Presentation.ppt 24
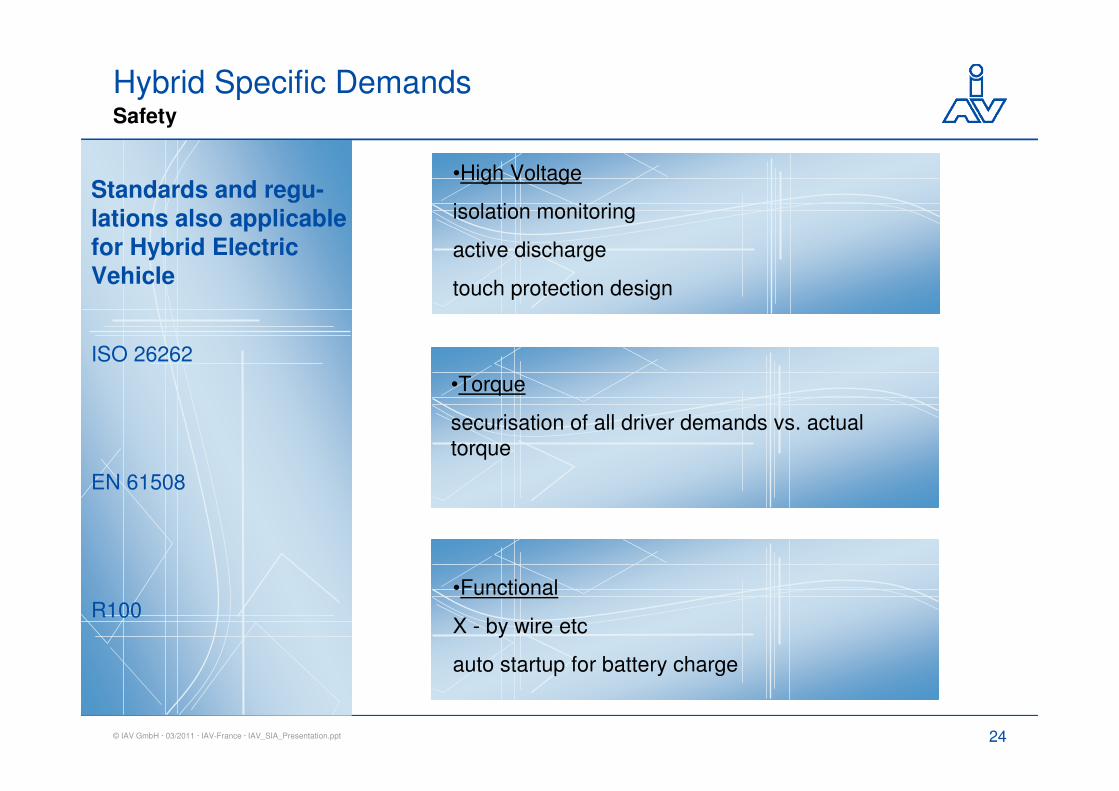
Hybrid Specific DemandsSafety
Standards and regu-lations also applicable for Hybrid Electric Vehicle
ISO 26262
EN 61508
R100
•High Voltage
isolation monitoring
active discharge
touch protection design
•Torque
securisation of all driver demands vs. actual
torque
•Functional
X - by wire etc
auto startup for battery charge
© IAV GmbH · 03/2011 · IAV-France · IAV_SIA_Presentation.ppt 25
Content
• Driving forces for alternative drive trains
• Classification & Potentials of HEV
• Impact on development processes
• Outlook
• Simulation as a continuous development tool
© IAV GmbH · 03/2011 · IAV-France · IAV_SIA_Presentation.ppt 26
� Simulation benefits
• Early prediction of the dynamic behavior
• Large modeling know-how for specific fields
of application
• Covers almost every domain
• Decreases the needs of physical prototypes
• Shortens the overall development time
MotivationSimulation in the development process
Source: IAV
� Challenges related to Hybrid technology
• Increases the powertrain complexity
• New opportunities for powertrain architecture
• Advanced control functions for energy
management and traction optimization
���� Objective: develop a cross-operating numerical
solution to investigate the entire vehicle performance
offered by complex hybrid strategies
© IAV GmbH · 03/2011 · IAV-France · IAV_SIA_Presentation.ppt 27
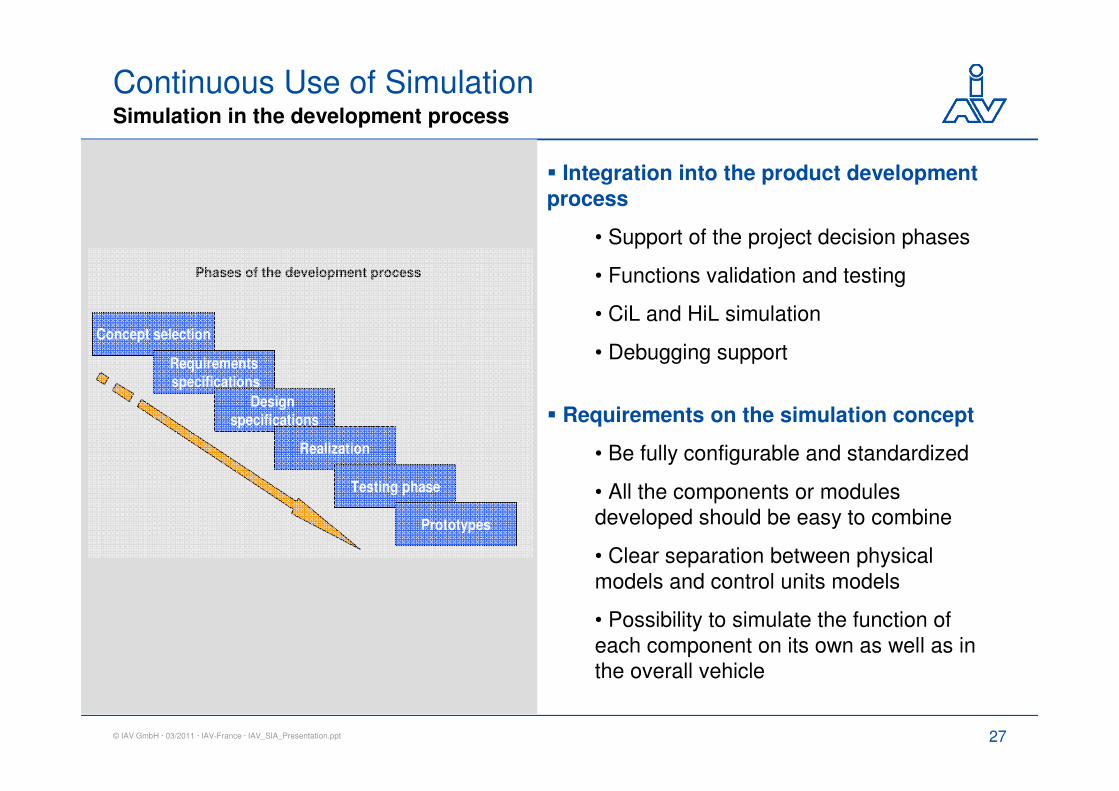
Continuous Use of SimulationSimulation in the development process
� Integration into the product development
process
• Support of the project decision phases
• Functions validation and testing
• CiL and HiL simulation
• Debugging supportConcept selection
Requirements
specifications
Design
specifications
Realization
Testing phase
Prototypes
Phases of the development process
� Requirements on the simulation concept
• Be fully configurable and standardized
• All the components or modules
developed should be easy to combine
• Clear separation between physical
models and control units models
• Possibility to simulate the function of
each component on its own as well as in
the overall vehicle
© IAV GmbH · 03/2011 · IAV-France · IAV_SIA_Presentation.ppt 28
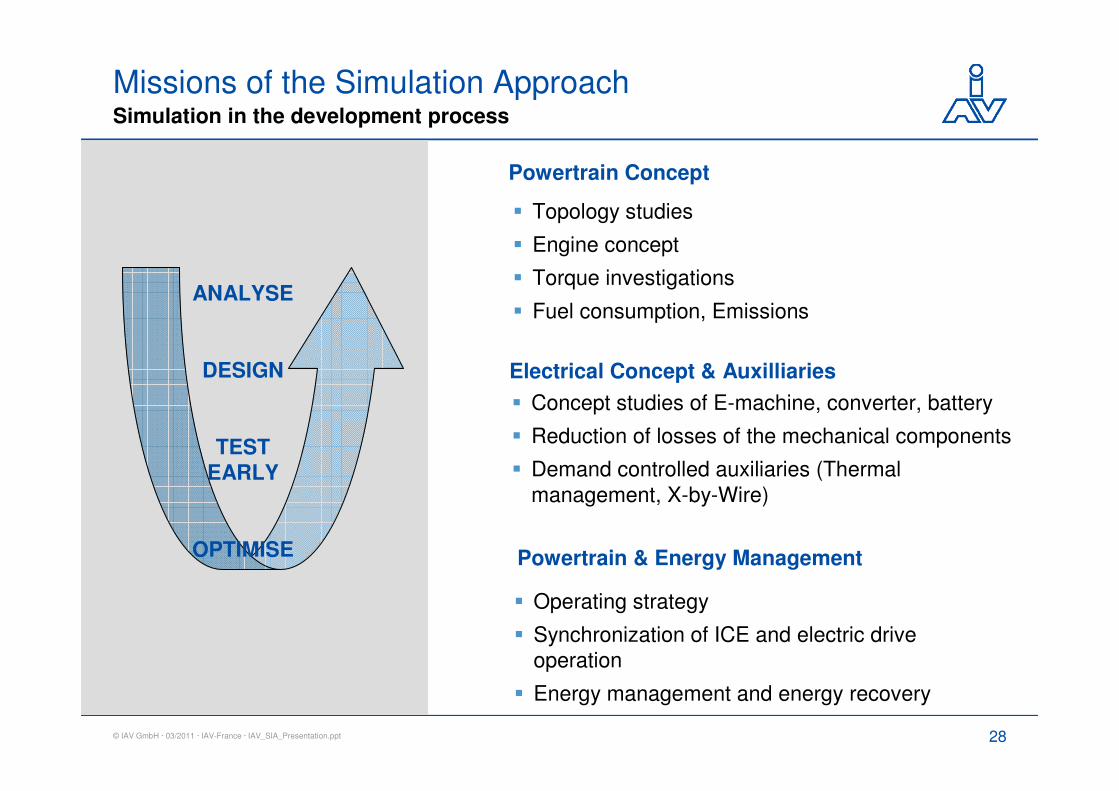
Missions of the Simulation ApproachSimulation in the development process
� Concept studies of E-machine, converter, battery
� Reduction of losses of the mechanical components
� Demand controlled auxiliaries (Thermal
management, X-by-Wire)
� Operating strategy
� Synchronization of ICE and electric drive
operation
� Energy management and energy recovery
� Topology studies
� Engine concept
� Torque investigations
� Fuel consumption, Emissions
Powertrain Concept
Electrical Concept & Auxilliaries
Powertrain & Energy Management
ANALYSE
DESIGN
TEST EARLY
OPTIMISE
© IAV GmbH · 03/2011 · IAV-France · IAV_SIA_Presentation.ppt 29
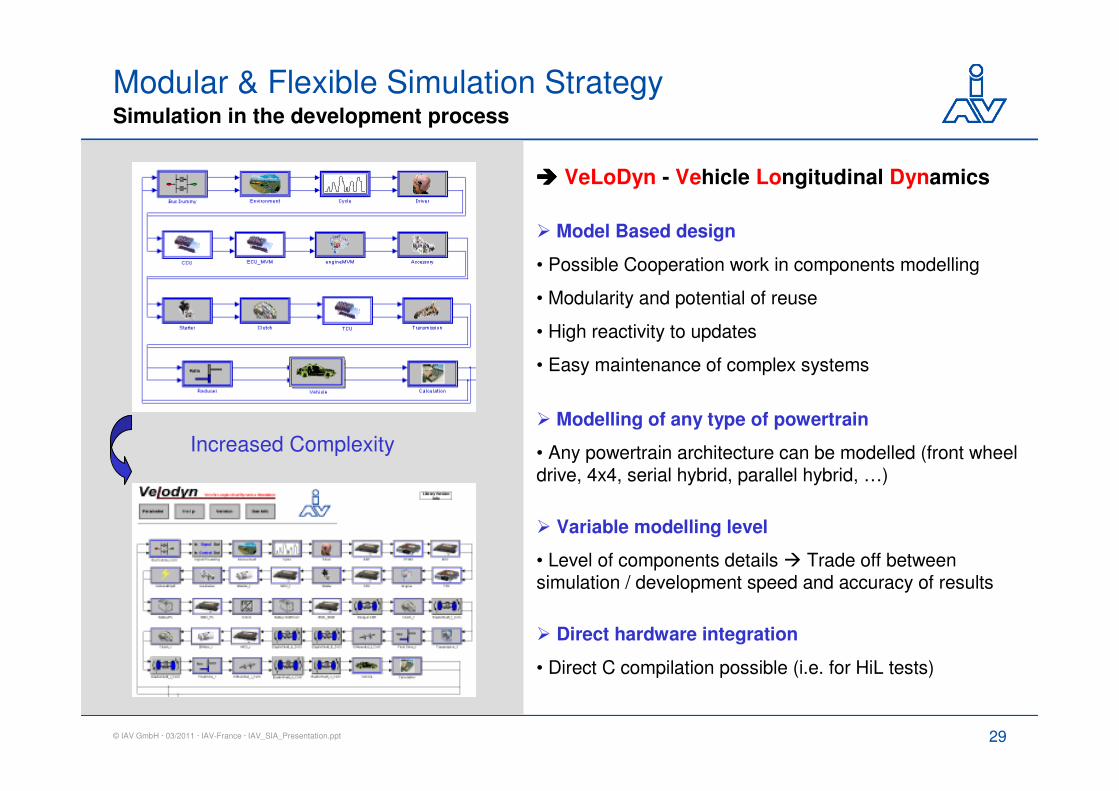
Modular & Flexible Simulation StrategySimulation in the development process
� Model Based design
• Possible Cooperation work in components modelling
• Modularity and potential of reuse
• High reactivity to updates
• Easy maintenance of complex systems
���� VeLoDyn - Vehicle Longitudinal Dynamics
Increased Complexity
� Modelling of any type of powertrain
• Any powertrain architecture can be modelled (front wheel drive, 4x4, serial hybrid, parallel hybrid, …)
� Variable modelling level
• Level of components details � Trade off between simulation / development speed and accuracy of results
� Direct hardware integration
• Direct C compilation possible (i.e. for HiL tests)
© IAV GmbH · 03/2011 · IAV-France · IAV_SIA_Presentation.ppt 30
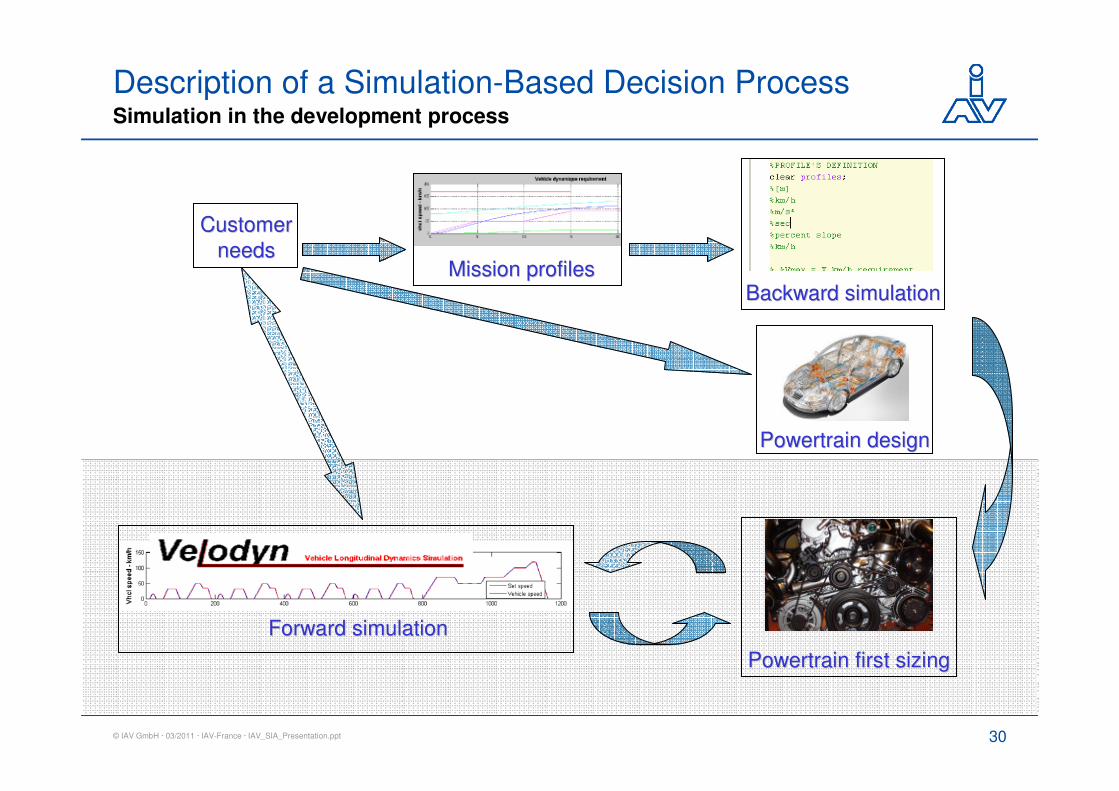
Description of a Simulation-Based Decision ProcessSimulation in the development process
BackwardBackward simulationsimulation
Customer Customer
needsneedsMission profilesMission profiles
PowertrainPowertrain designdesign
PowertrainPowertrain first first sizingsizing
ForwardForward simulationsimulation
© IAV GmbH · 03/2011 · IAV-France · IAV_SIA_Presentation.ppt 31
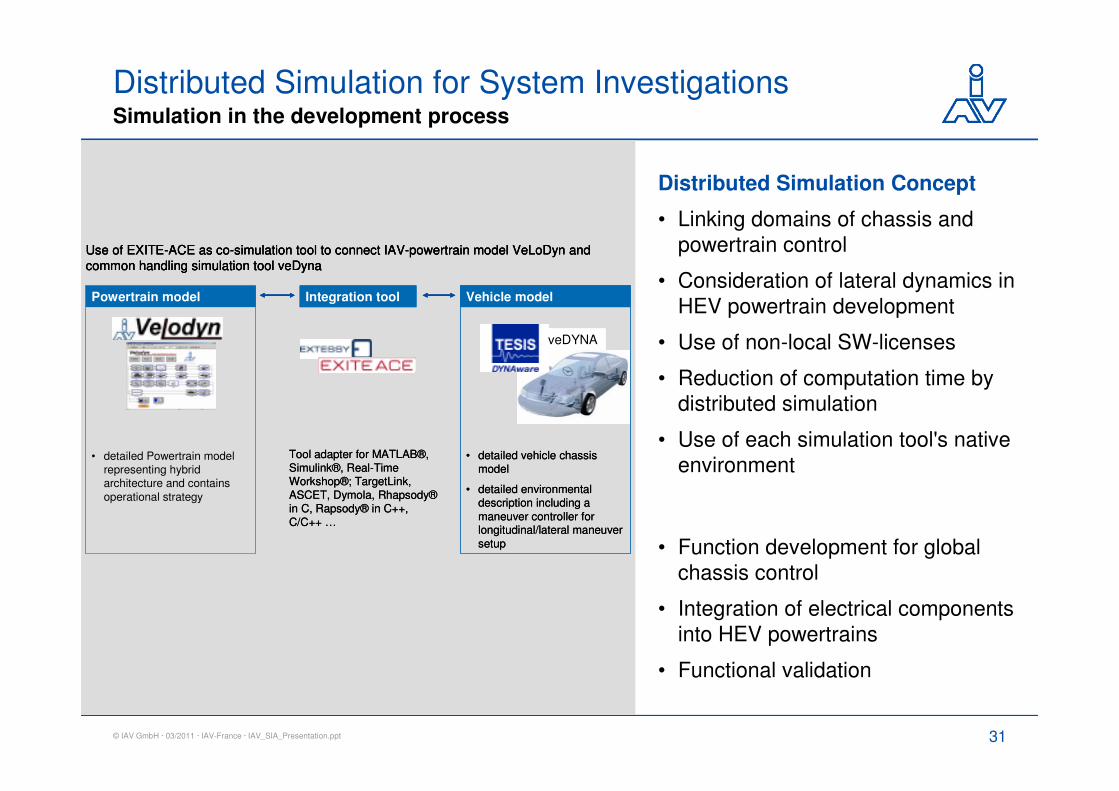
Distributed Simulation for System InvestigationsSimulation in the development process
Distributed Simulation Concept
• Linking domains of chassis and
powertrain control
• Consideration of lateral dynamics in
HEV powertrain development
• Use of non-local SW-licenses
• Reduction of computation time by
distributed simulation
• Use of each simulation tool's native
environment
• Function development for global
chassis control
• Integration of electrical components
into HEV powertrains
• Functional validation
Powertrain model
• detailed Powertrain model representing hybrid architecture and contains
operational strategy
• detailed vehicle chassis model
• detailed environmental description including a
maneuver controller for longitudinal/lateral maneuver
setup
veDYNA
Vehicle model
• detailed vehicle chassis model
• detailed environmental description including a
maneuver controller for longitudinal/lateral maneuver
setup
veDYNAveDYNA
Vehicle model
Use of EXITE-ACE as co-simulation tool to connect IAV-powertrain model VeLoDyn and
common handling simulation tool veDyna
Integration tool
Tool adapter for MATLAB®, Simulink®, Real-Time Workshop®; TargetLink, ASCET, Dymola, Rhapsody®in C, Rapsody® in C++, C/C++ …
Use of EXITE-ACE as co-simulation tool to connect IAV-powertrain model VeLoDyn and
common handling simulation tool veDyna
Integration tool
Use of EXITE-ACE as co-simulation tool to connect IAV-powertrain model VeLoDyn and
common handling simulation tool veDyna
Integration tool
Tool adapter for MATLAB®, Simulink®, Real-Time Workshop®; TargetLink, ASCET, Dymola, Rhapsody®in C, Rapsody® in C++, C/C++ …
© IAV GmbH · 03/2011 · IAV-France · IAV_SIA_Presentation.ppt 32
Content
• Driving forces for alternative drive trains
• Classification & Potentials of HEV
• Impact on development processes
• Outlook
• Simulation as a continuous development tool
� Hybridization & impact on stability
� Enhanced driving dynamics
© IAV GmbH · 03/2011 · IAV-France · IAV_SIA_Presentation.ppt 33
Content
• Driving forces for alternative drive trains
• Classification & Potentials of HEV
• Impact on development processes
• Outlook
• Simulation as a continuous development tool
���� Hybridization & impact on stability
� Enhanced driving dynamics
© IAV GmbH · 03/2011 · IAV-France · IAV_SIA_Presentation.ppt 34
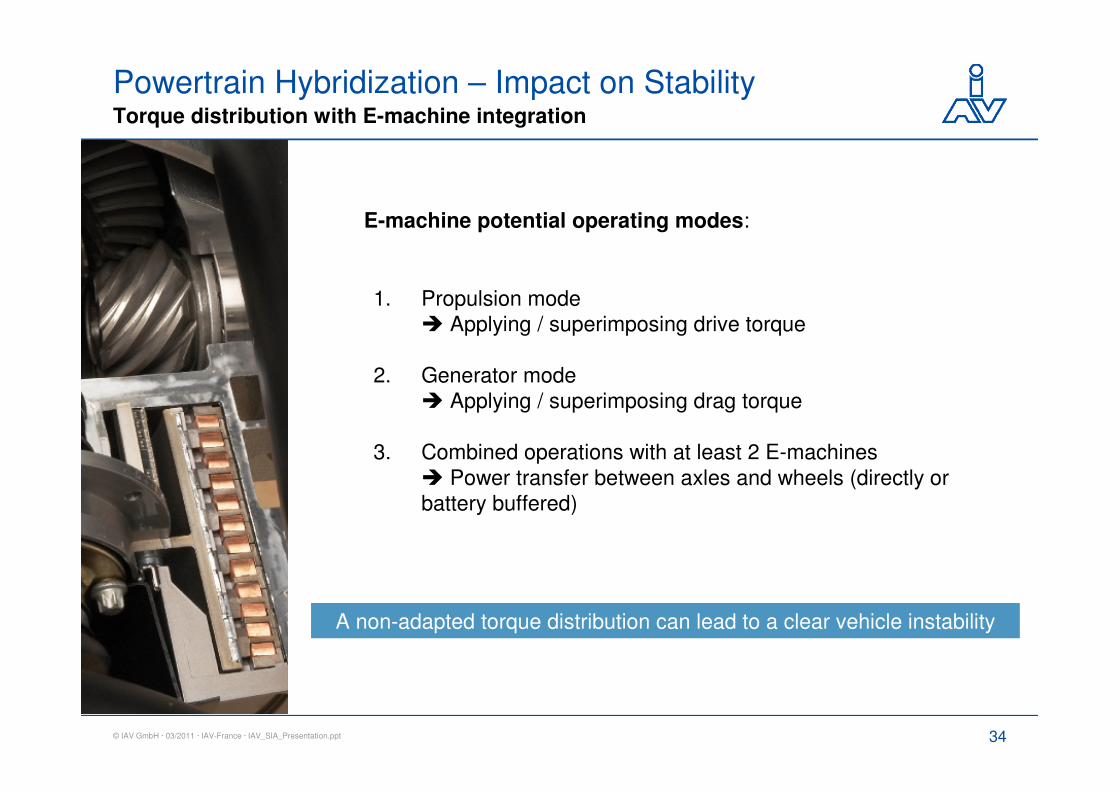
Powertrain Hybridization – Impact on Stability Torque distribution with E-machine integration
1. Propulsion mode
� Applying / superimposing drive torque
2. Generator mode
� Applying / superimposing drag torque
3. Combined operations with at least 2 E-machines
� Power transfer between axles and wheels (directly or
battery buffered)
E-machine potential operating modes:
A non-adapted torque distribution can lead to a clear vehicle instability
© IAV GmbH · 03/2011 · IAV-France · IAV_SIA_Presentation.ppt 35
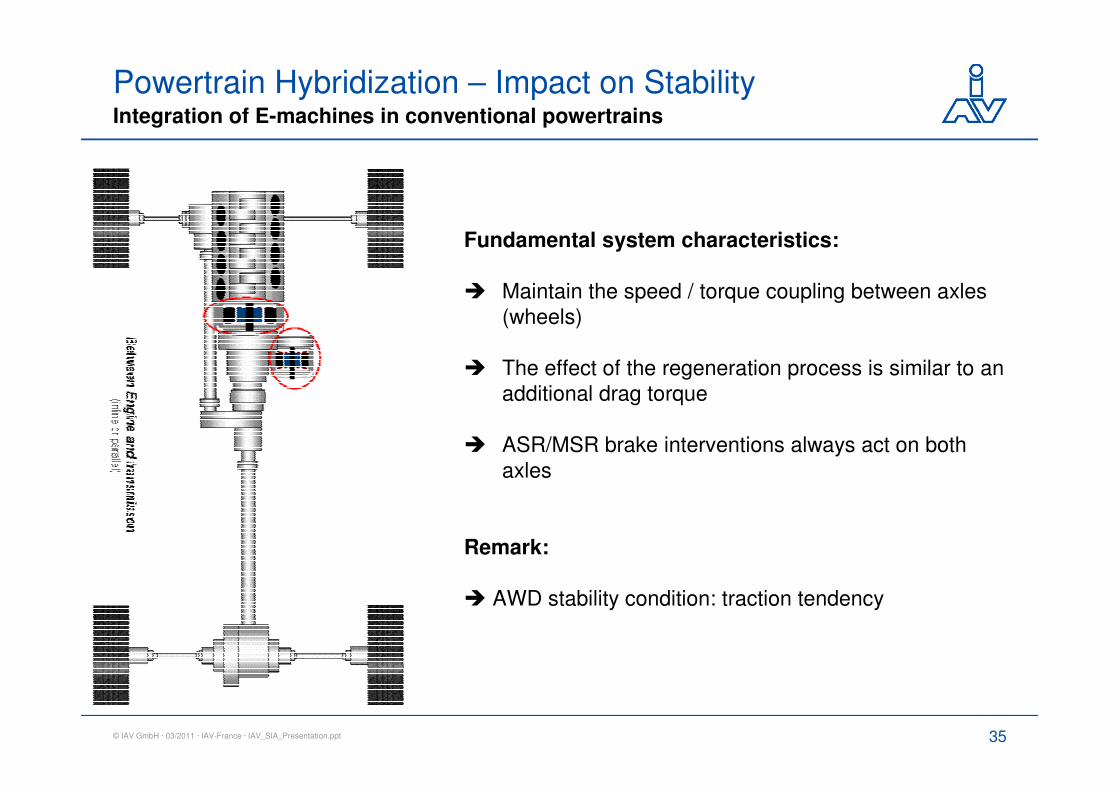
Powertrain Hybridization – Impact on StabilityIntegration of E-machines in conventional powertrains
Fundamental system characteristics:
� Maintain the speed / torque coupling between axles
(wheels)
� The effect of the regeneration process is similar to an
additional drag torque
� ASR/MSR brake interventions always act on both
axles
Remark:
� AWD stability condition: traction tendency
© IAV GmbH · 03/2011 · IAV-France · IAV_SIA_Presentation.ppt 36
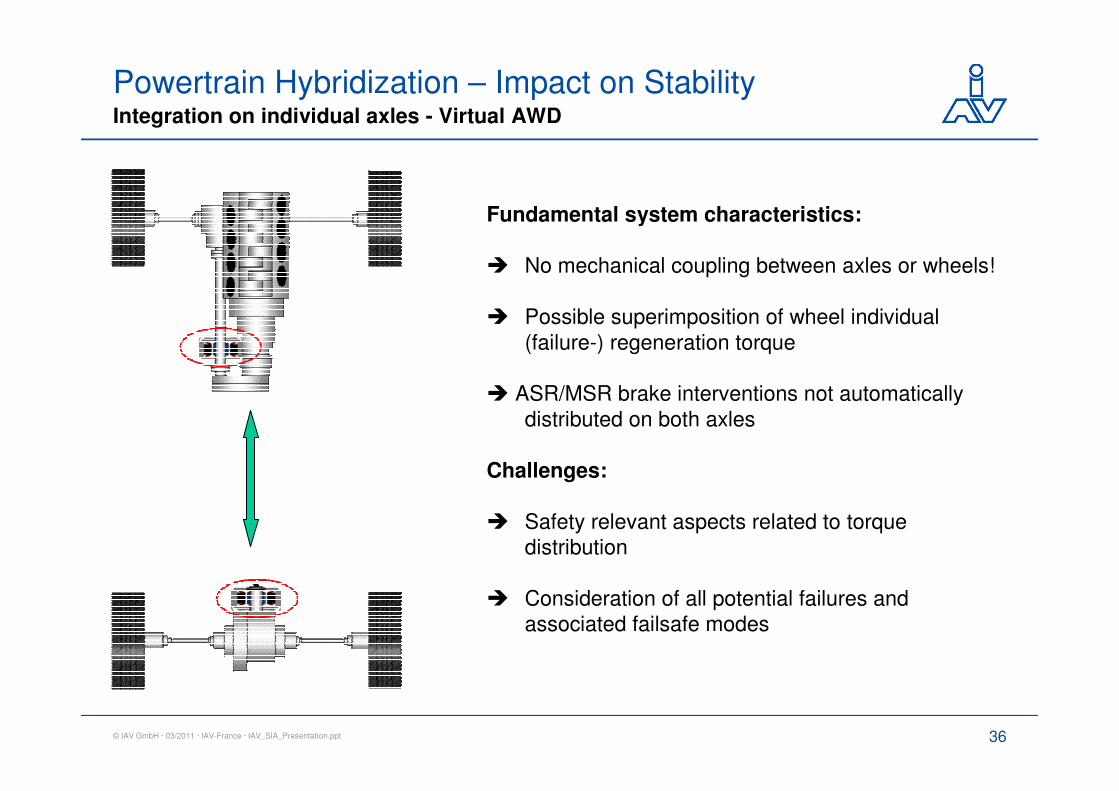
Fundamental system characteristics:
� No mechanical coupling between axles or wheels!
� Possible superimposition of wheel individual
(failure-) regeneration torque
� ASR/MSR brake interventions not automatically
distributed on both axles
Challenges:
� Safety relevant aspects related to torque
distribution
� Consideration of all potential failures and
associated failsafe modes
Powertrain Hybridization – Impact on StabilityIntegration on individual axles - Virtual AWD
© IAV GmbH · 03/2011 · IAV-France · IAV_SIA_Presentation.ppt 37
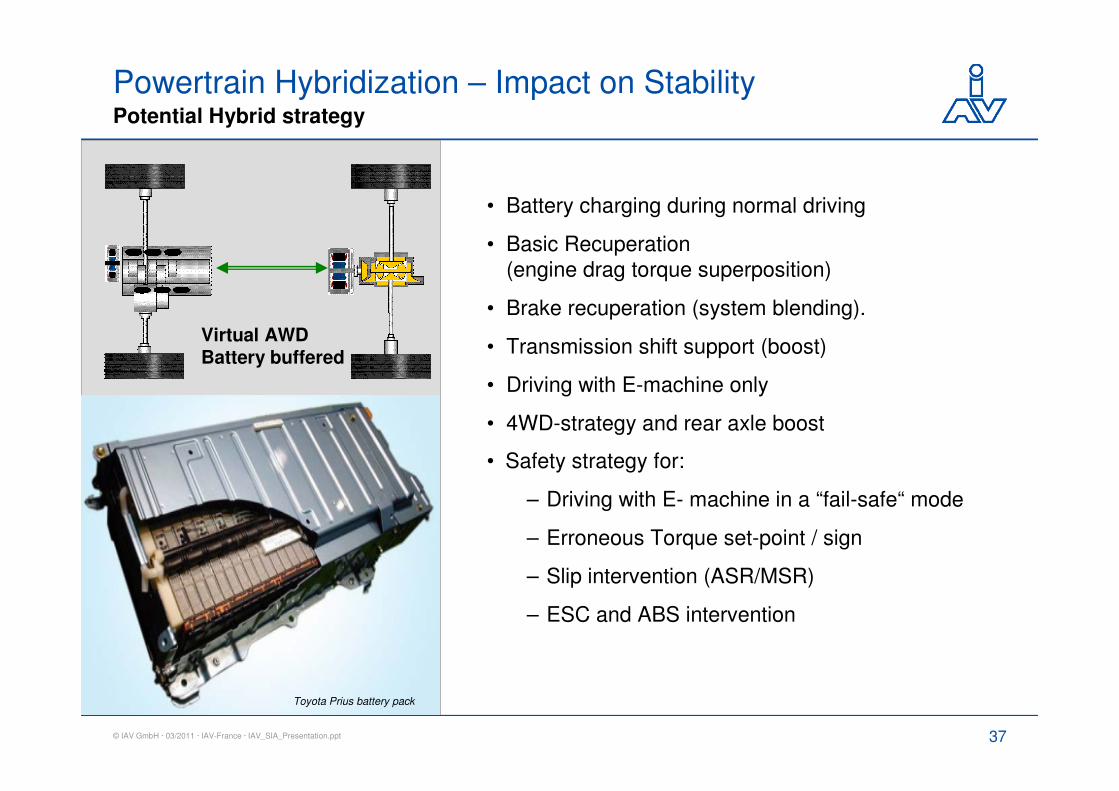
Powertrain Hybridization – Impact on StabilityPotential Hybrid strategy
• Battery charging during normal driving
• Basic Recuperation
(engine drag torque superposition)
• Brake recuperation (system blending).
• Transmission shift support (boost)
• Driving with E-machine only
• 4WD-strategy and rear axle boost
Virtual AWDBattery buffered
• Safety strategy for:
– Driving with E- machine in a “fail-safe“ mode
– Erroneous Torque set-point / sign
– Slip intervention (ASR/MSR)
– ESC and ABS intervention
Toyota Prius battery pack
© IAV GmbH · 03/2011 · IAV-France · IAV_SIA_Presentation.ppt 38
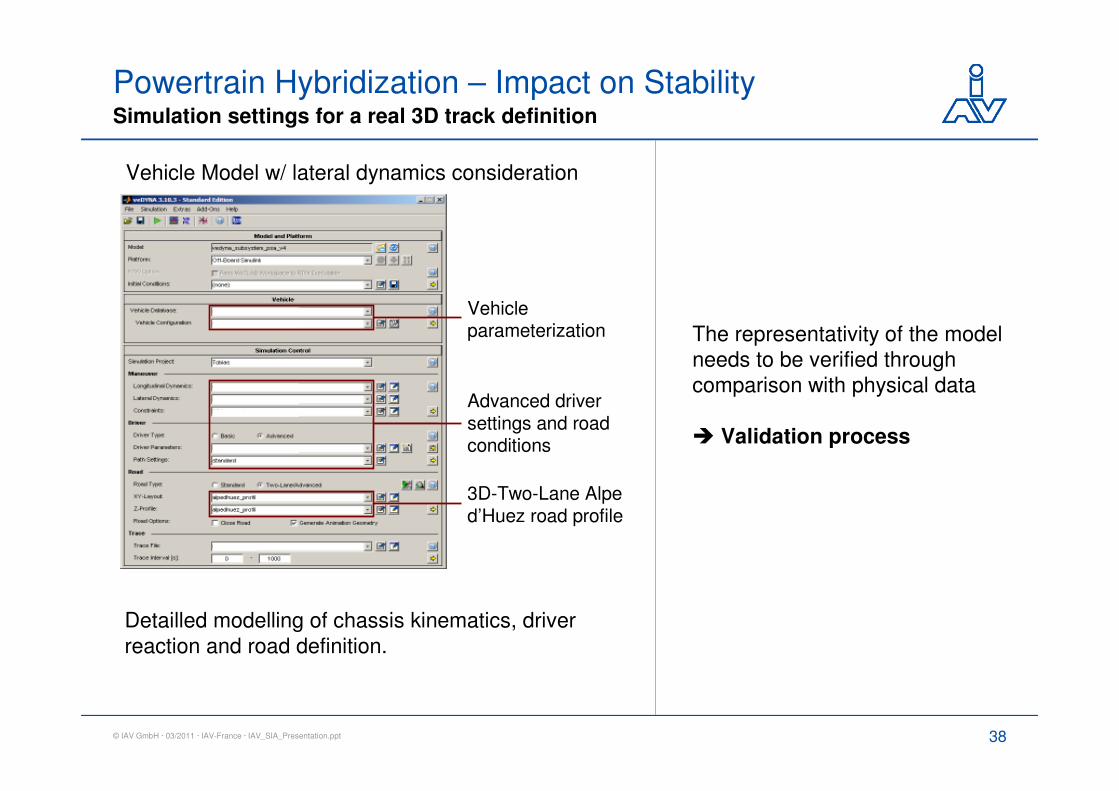
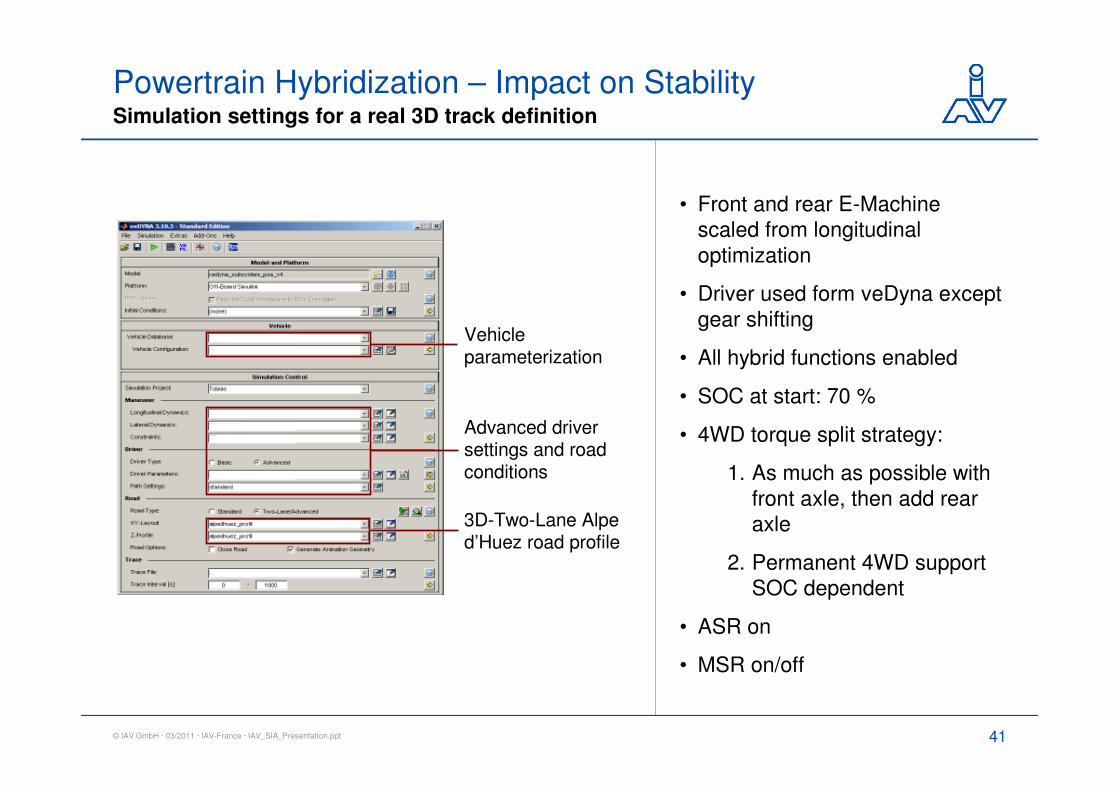
Powertrain Hybridization – Impact on StabilitySimulation settings for a real 3D track definition
3D-Two-Lane Alped’Huez road profile
Vehicle parameterization
Advanced driver settings and road conditions
The representativity of the model
needs to be verified through
comparison with physical data
� Validation process
Vehicle Model w/ lateral dynamics consideration
Detailled modelling of chassis kinematics, driver
reaction and road definition.
© IAV GmbH · 03/2011 · IAV-France · IAV_SIA_Presentation.ppt 39
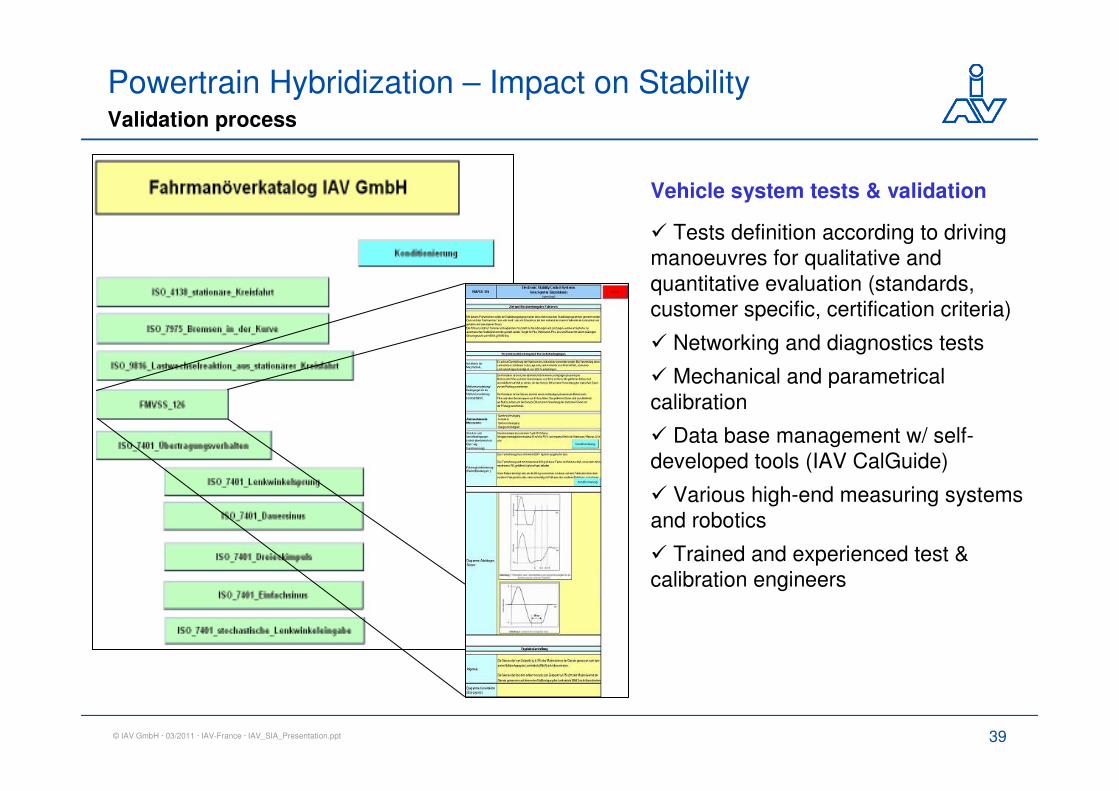
Powertrain Hybridization – Impact on StabilityValidation process
Vehicle system tests & validation
� Tests definition according to driving
manoeuvres for qualitative and
quantitative evaluation (standards,
customer specific, certification criteria)
� Networking and diagnostics tests
� Mechanical and parametrical
calibration
� Data base management w/ self-
developed tools (IAV CalGuide)
� Various high-end measuring systems
and robotics
� Trained and experienced test &
calibration engineers
© IAV GmbH · 03/2011 · IAV-France · IAV_SIA_Presentation.ppt 40
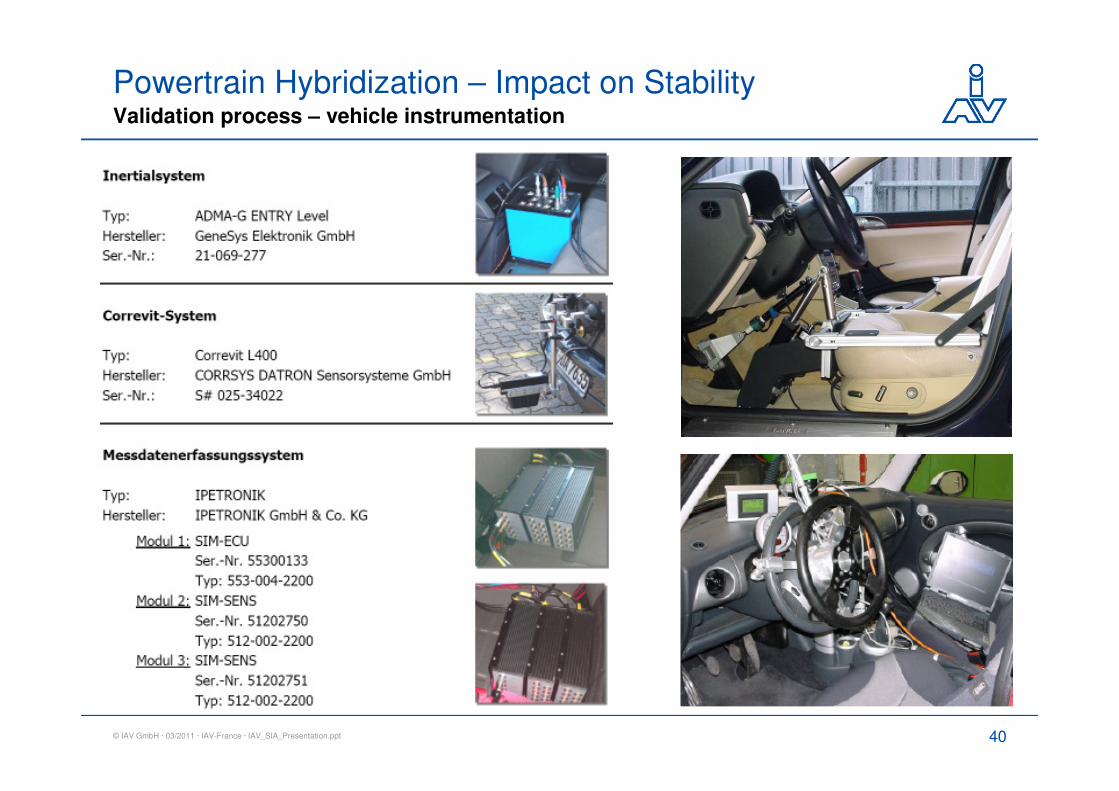
Powertrain Hybridization – Impact on StabilityValidation process – vehicle instrumentation
© IAV GmbH · 03/2011 · IAV-France · IAV_SIA_Presentation.ppt 41
Powertrain Hybridization – Impact on StabilitySimulation settings for a real 3D track definition
3D-Two-Lane Alped’Huez road profile
• Front and rear E-Machine
scaled from longitudinal
optimization
• Driver used form veDyna except
gear shifting
• All hybrid functions enabled
• SOC at start: 70 %
• 4WD torque split strategy:
1. As much as possible with
front axle, then add rear
axle
2. Permanent 4WD support
SOC dependent
• ASR on
• MSR on/off
Vehicle parameterization
Advanced driver settings and road conditions
© IAV GmbH · 03/2011 · IAV-France · IAV_SIA_Presentation.ppt 42
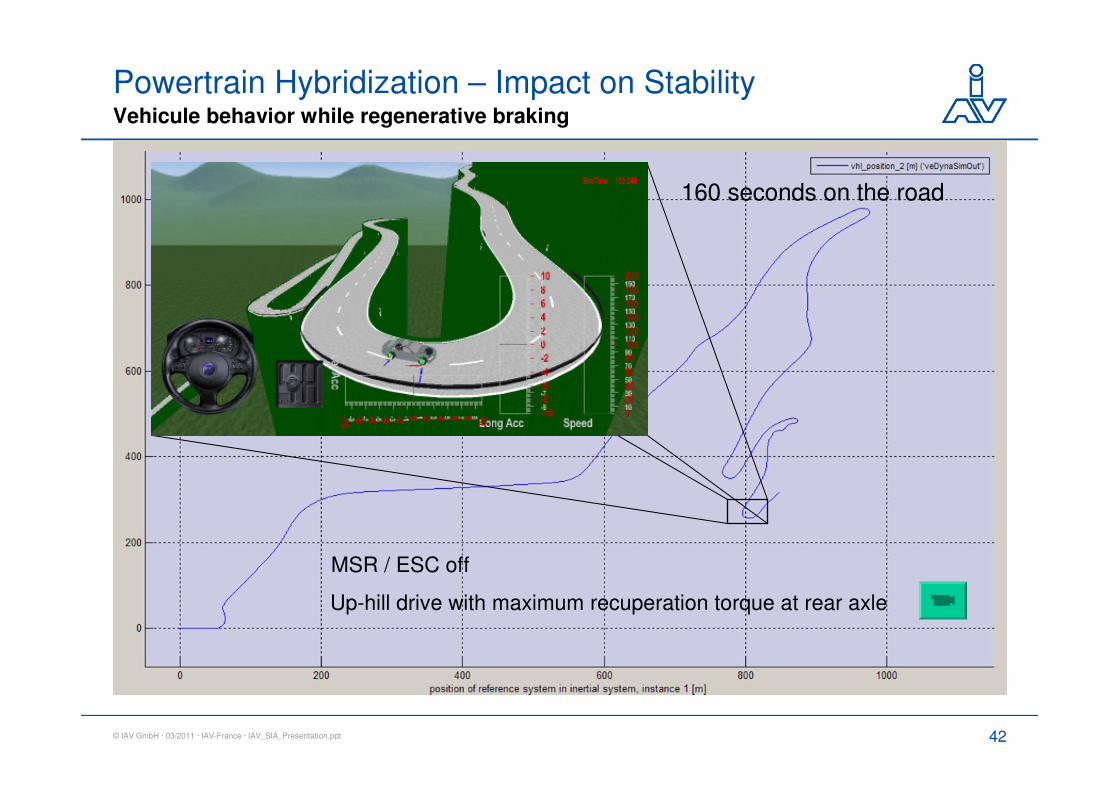
Powertrain Hybridization – Impact on StabilityVehicule behavior while regenerative braking
160 seconds on the road
MSR / ESC off
Up-hill drive with maximum recuperation torque at rear axle
© IAV GmbH · 03/2011 · IAV-France · IAV_SIA_Presentation.ppt 43
Content
• Driving forces for alternative drive trains
• Classification & Potentials of HEV
• Impact on development processes
• Outlook
• Simulation as a continuous development tool
� Hybridization & impact on stability
���� Enhanced driving dynamics
© IAV GmbH · 03/2011 · IAV-France · IAV_SIA_Presentation.ppt 44
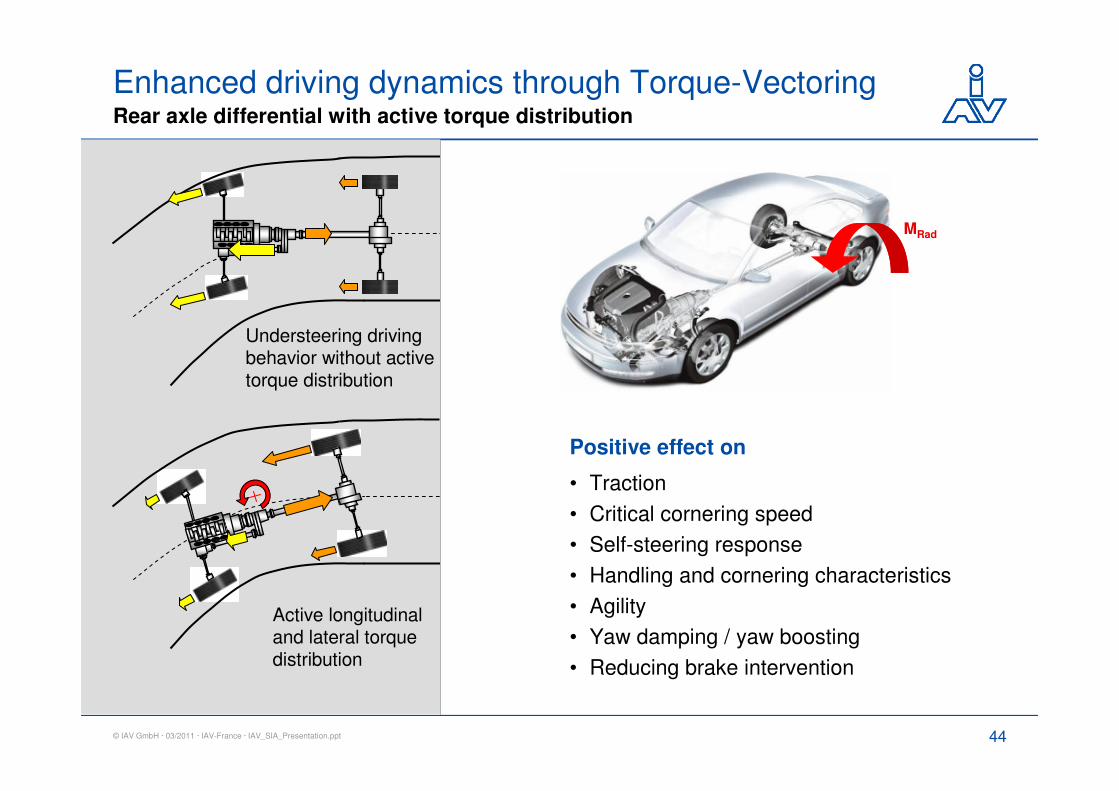
Enhanced driving dynamics through Torque-VectoringRear axle differential with active torque distribution
MRad
Understeering driving behavior without active torque distribution
Active longitudinal and lateral torque distribution
Positive effect on
• Traction
• Critical cornering speed
• Self-steering response
• Handling and cornering characteristics
• Agility
• Yaw damping / yaw boosting
• Reducing brake intervention
© IAV GmbH · 03/2011 · IAV-France · IAV_SIA_Presentation.ppt 45
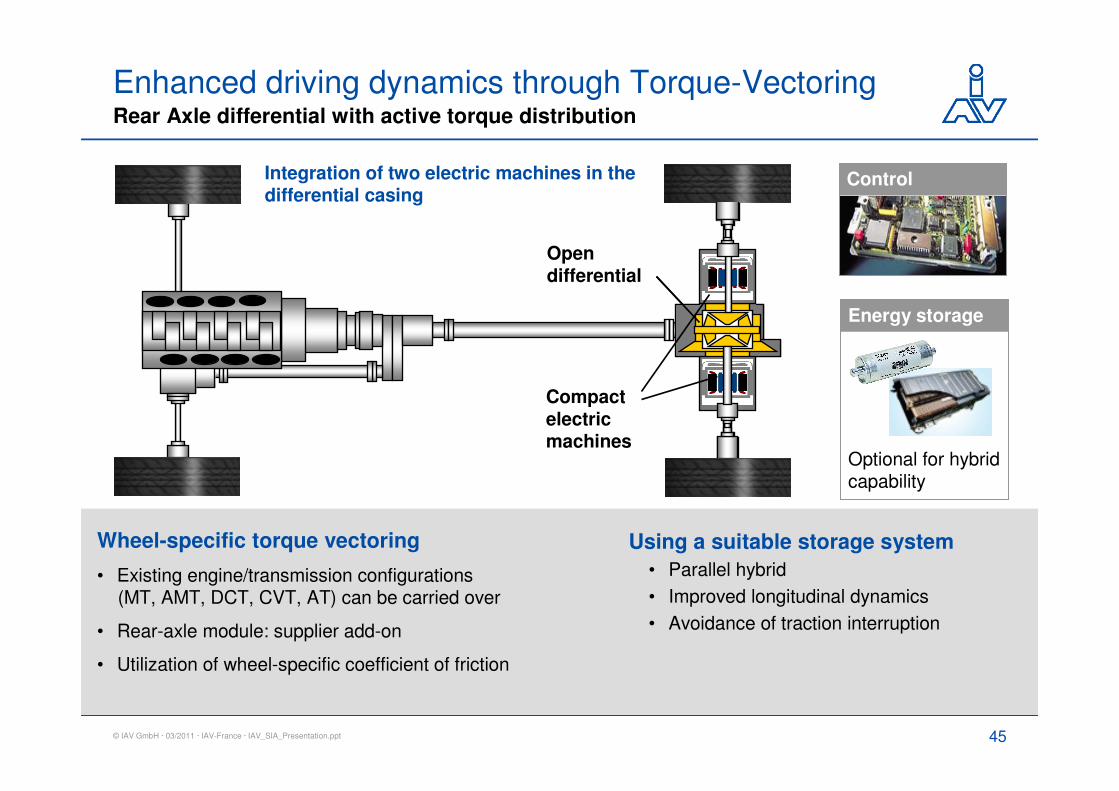
Enhanced driving dynamics through Torque-VectoringRear Axle differential with active torque distribution
Open differential
Wheel-specific torque vectoring
• Existing engine/transmission configurations (MT, AMT, DCT, CVT, AT) can be carried over
• Rear-axle module: supplier add-on
• Utilization of wheel-specific coefficient of friction
Integration of two electric machines in the differential casing
Control
Compact electric machines
Using a suitable storage system
• Parallel hybrid
• Improved longitudinal dynamics
• Avoidance of traction interruption
Energy storage
Optional for hybrid capability
© IAV GmbH · 03/2011 · IAV-France · IAV_SIA_Presentation.ppt 46
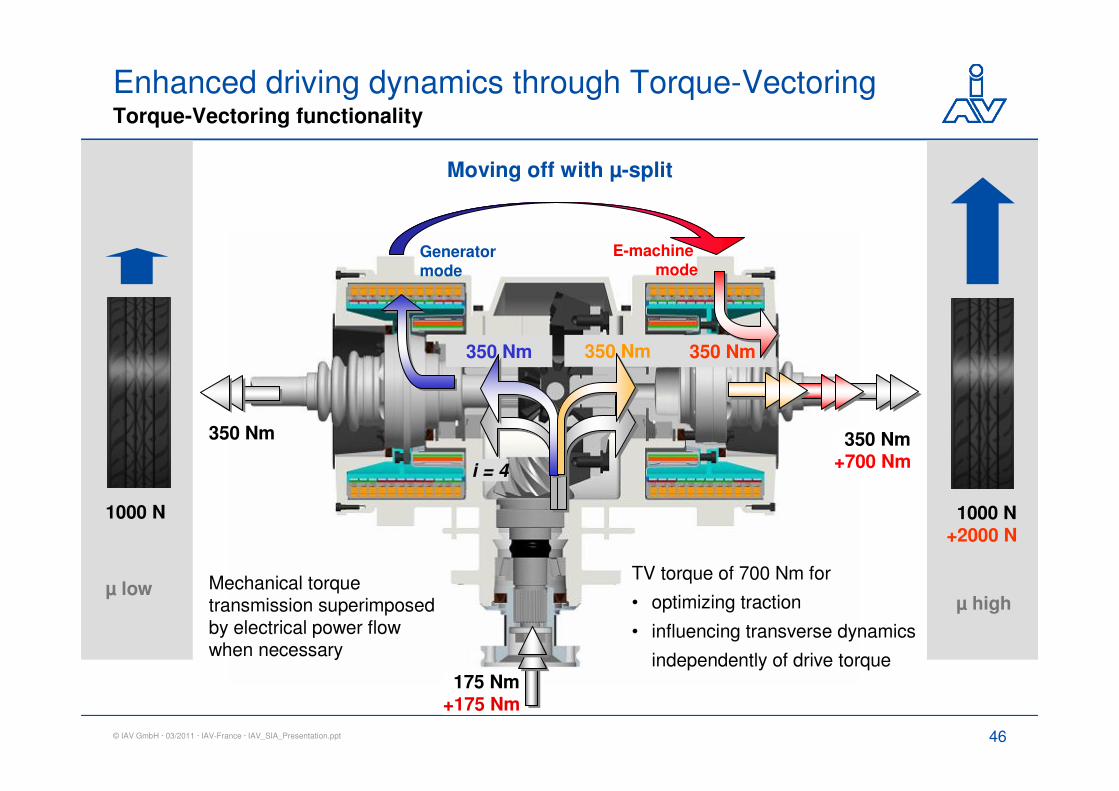
Enhanced driving dynamics through Torque-VectoringTorque-Vectoring functionality
µ low
1000 N
350 Nm350 Nm
i = 4
175 Nm
Moving off with µ-split
µ high
1000 N
Mechanical torque transmission superimposed by electrical power flow when necessary
TV torque of 700 Nm for
• optimizing traction
• influencing transverse dynamics
independently of drive torque
350 Nm350 Nm 350 Nm
Generator mode
E-machine mode
350 Nm+700 Nm
1000 N+2000 N
175 Nm+175 Nm
© IAV GmbH · 03/2011 · IAV-France · IAV_SIA_Presentation.ppt 47
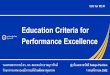
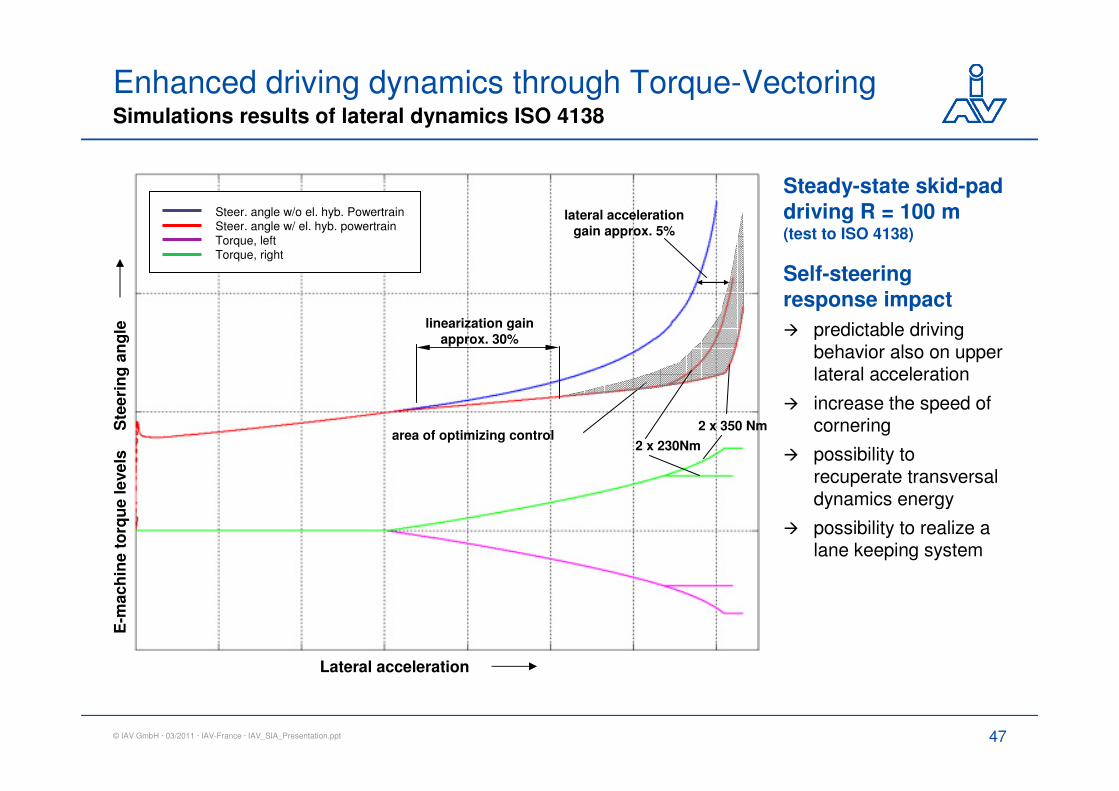
Enhanced driving dynamics through Torque-VectoringSimulations results of lateral dynamics ISO 4138
Steady-state skid-pad
driving R = 100 m(test to ISO 4138)
E-m
ac
hin
e t
orq
ue
le
ve
lsS
tee
rin
g a
ng
le
Lateral acceleration
area of optimizing control
linearization gain approx. 30%
lateral acceleration gain approx. 5%
2 x 350 Nm
2 x 230Nm
Self-steering
response impact
� predictable driving behavior also on upper lateral acceleration
� increase the speed of cornering
� possibility to recuperate transversal dynamics energy
� possibility to realize a lane keeping system
Steer. angle w/o el. hyb. PowertrainSteer. angle w/ el. hyb. powertrain
Torque, leftTorque, right
© IAV GmbH · 03/2011 · IAV-France · IAV_SIA_Presentation.ppt 48
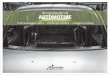
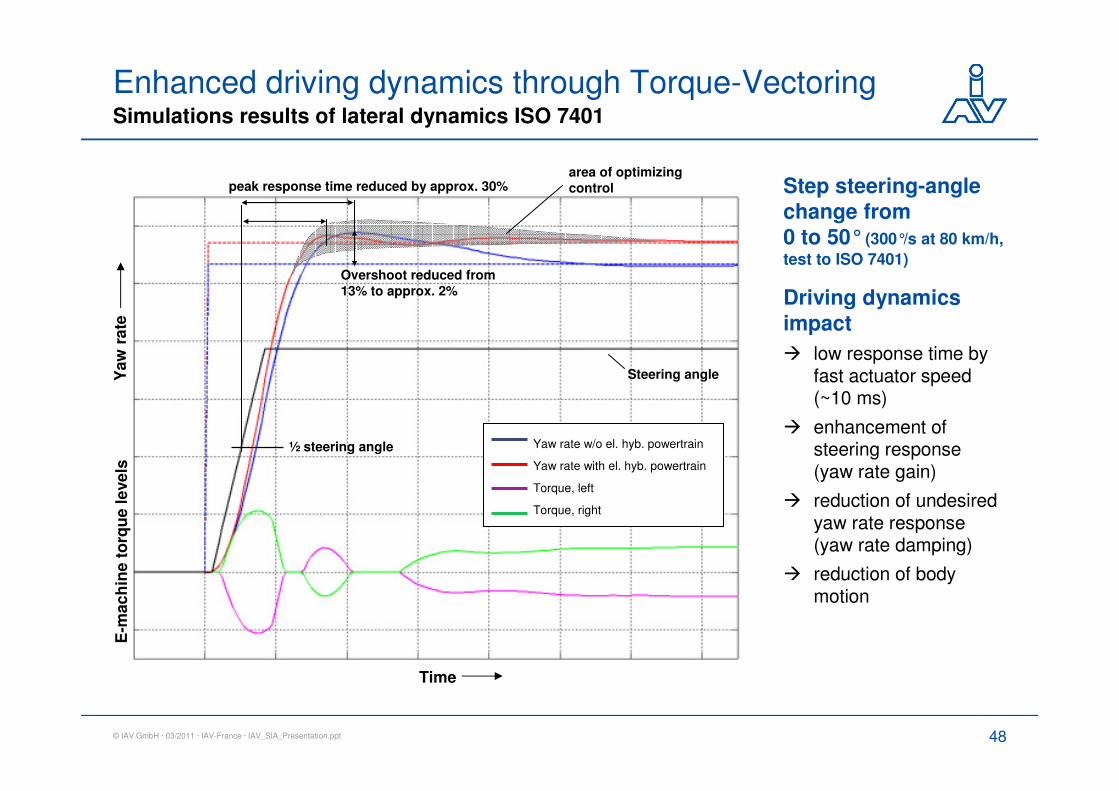
Enhanced driving dynamics through Torque-VectoringSimulations results of lateral dynamics ISO 7401
Step steering-angle
change from0 to 50° (300°/s at 80 km/h,
test to ISO 7401)
E-m
ac
hin
e t
orq
ue
le
ve
lsY
aw
ra
te
Time
½ steering angle
Steering angle
Overshoot reduced from13% to approx. 2%
area of optimizing controlpeak response time reduced by approx. 30%
Driving dynamics
impact
� low response time by fast actuator speed (~10 ms)
� enhancement of steering response (yaw rate gain)
� reduction of undesired yaw rate response (yaw rate damping)
� reduction of body motion
Yaw rate w/o el. hyb. powertrain
Yaw rate with el. hyb. powertrain
Torque, left
Torque, right
© IAV GmbH · 03/2011 · IAV-France · IAV_SIA_Presentation.ppt 49
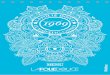
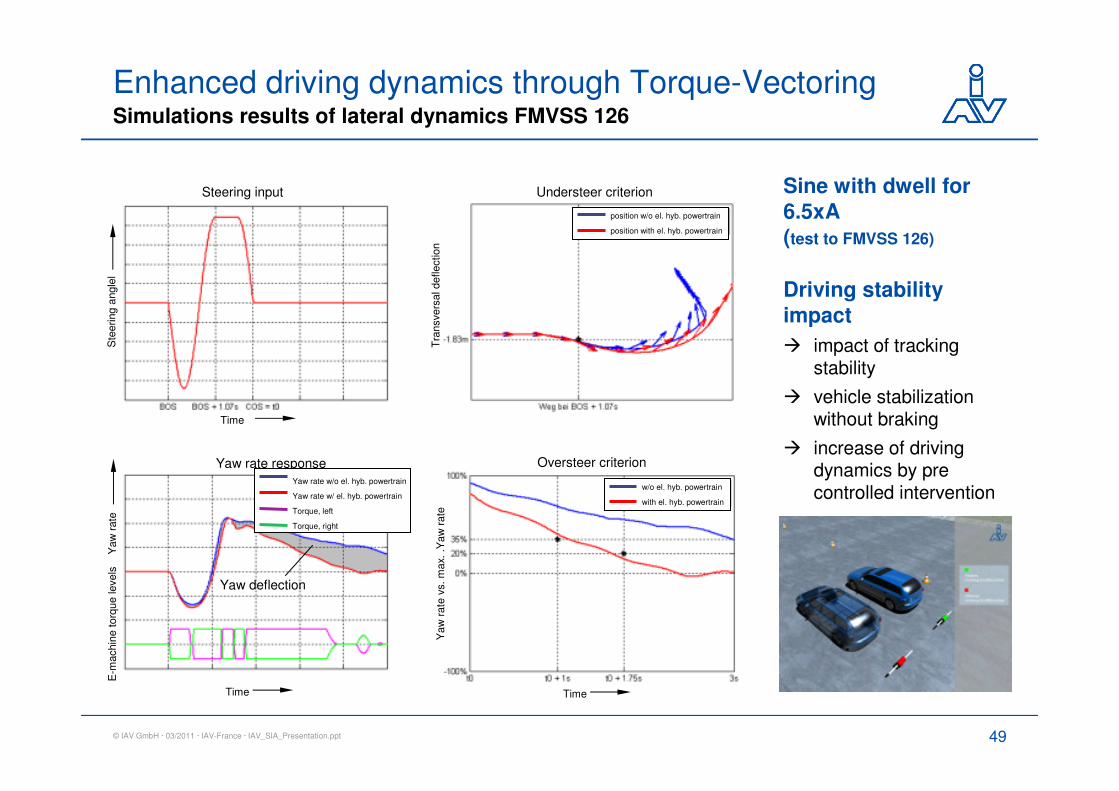
Enhanced driving dynamics through Torque-VectoringSimulations results of lateral dynamics FMVSS 126
Sine with dwell for
6.5xA(test to FMVSS 126)
Driving stability
impact
� impact of tracking stability
� vehicle stabilization without braking
� increase of driving dynamics by pre controlled intervention
Tra
nsvers
al deflection
Yaw
rate
vs. m
ax.
.Y
aw
rate
Time
Oversteer criterion
Understeer criterionSteering input
E-m
achin
e t
orq
ue levels
Yaw
rate
Ste
ering a
ngle
l
Time
Time
Yaw rate response
Yaw deflection
Yaw rate w/o el. hyb. powertrain
Yaw rate w/ el. hyb. powertrain
Torque, left
Torque, right
position w/o el. hyb. powertrain
position with el. hyb. powertrain
w/o el. hyb. powertrain
with el. hyb. powertrain
© IAV GmbH · 03/2011 · IAV-France · IAV_SIA_Presentation.ppt 50
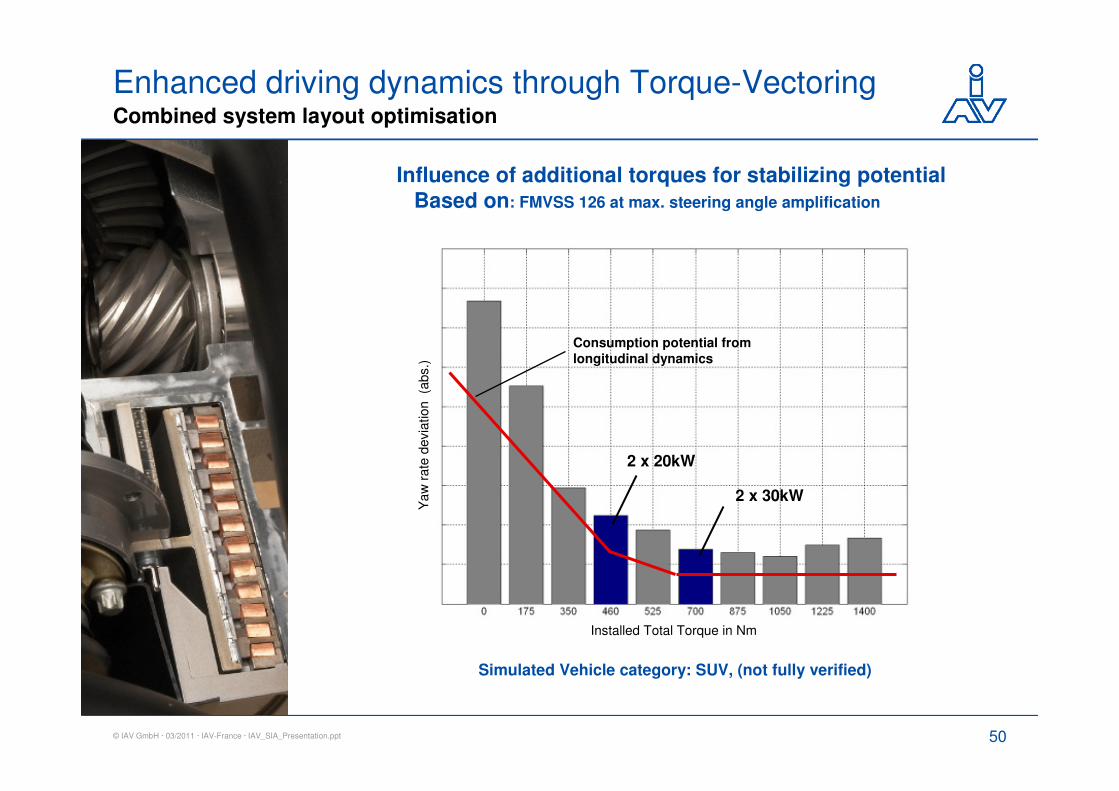
Enhanced driving dynamics through Torque-VectoringCombined system layout optimisation
Installed Total Torque in Nm
Ya
w r
ate
devia
tion (a
bs.)
2 x 20kW
2 x 30kW
Consumption potential from longitudinal dynamics
Influence of additional torques for stabilizing potentialBased on: FMVSS 126 at max. steering angle amplification
Simulated Vehicle category: SUV, (not fully verified)
© IAV GmbH · 03/2011 · IAV-France · IAV_SIA_Presentation.ppt 51
� Advantages of Simulation (Co-Simu)
• supports every phase of the development process
• covers all levels, from component to system
• functional development support and testing
• hybrid strategy verification (torque distribution,
regeneration…)
• influence of HY specific functions on vehicle stability
• supports safety analysis and failsafe modes definition
Pix
elioSimulation in the Development Process of Hybrid Powertrains
� Characteristics of the simulation concept
• Fully configurable and standardized
• Easy combination of all the components or modules
developed
• Clear separation between physical models and control
units models
• Possibility to simulate the function of each component
on its own as well as in the overall vehicle
• Re-use of former models for spin-off projects
© IAV GmbH · 03/2011 · IAV-France · IAV_SIA_Presentation.ppt 52
Content
• Driving forces for alternative drive trains
• Classification & Potentials of HEV
• Impact on development processes
• Outlook
• Simulation as a continuous development tool
© IAV GmbH · 03/2011 · IAV-France · IAV_SIA_Presentation.ppt 53
Perspectives in HEV TechnologiesUltimate Obejctive: Zero Emission
What kind of vehicle do I need?
PEV readiness report by
Roland Berger Consulting:
„…cities and other stakeholders
should educate and prepare
consumers to accelerate PEV
transition from niche toy of the
elite to mass market…”
Individual mobility perspective:
„lease / rent by actual need“
Driving Range?
© IAV GmbH · 03/2011 · IAV-France · IAV_SIA_Presentation.ppt 54
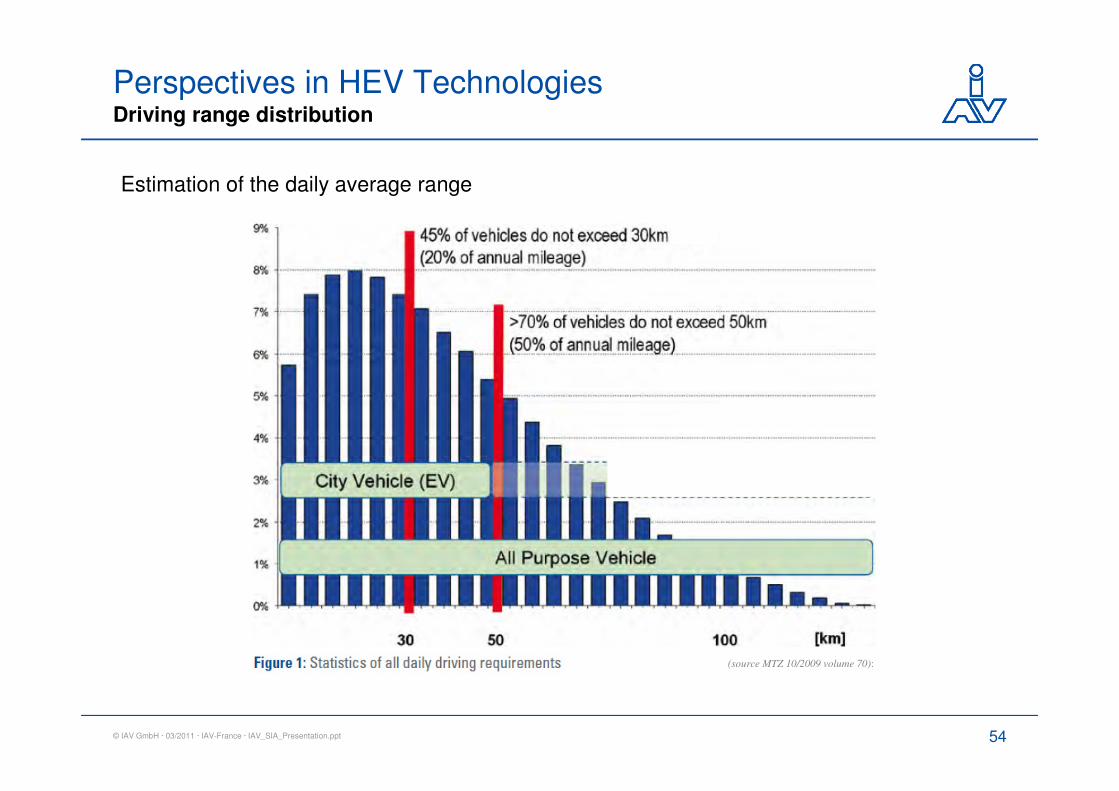
Perspectives in HEV TechnologiesDriving range distribution
Estimation of the daily average range
(source MTZ 10/2009 volume 70):
© IAV GmbH · 03/2011 · IAV-France · IAV_SIA_Presentation.ppt 55
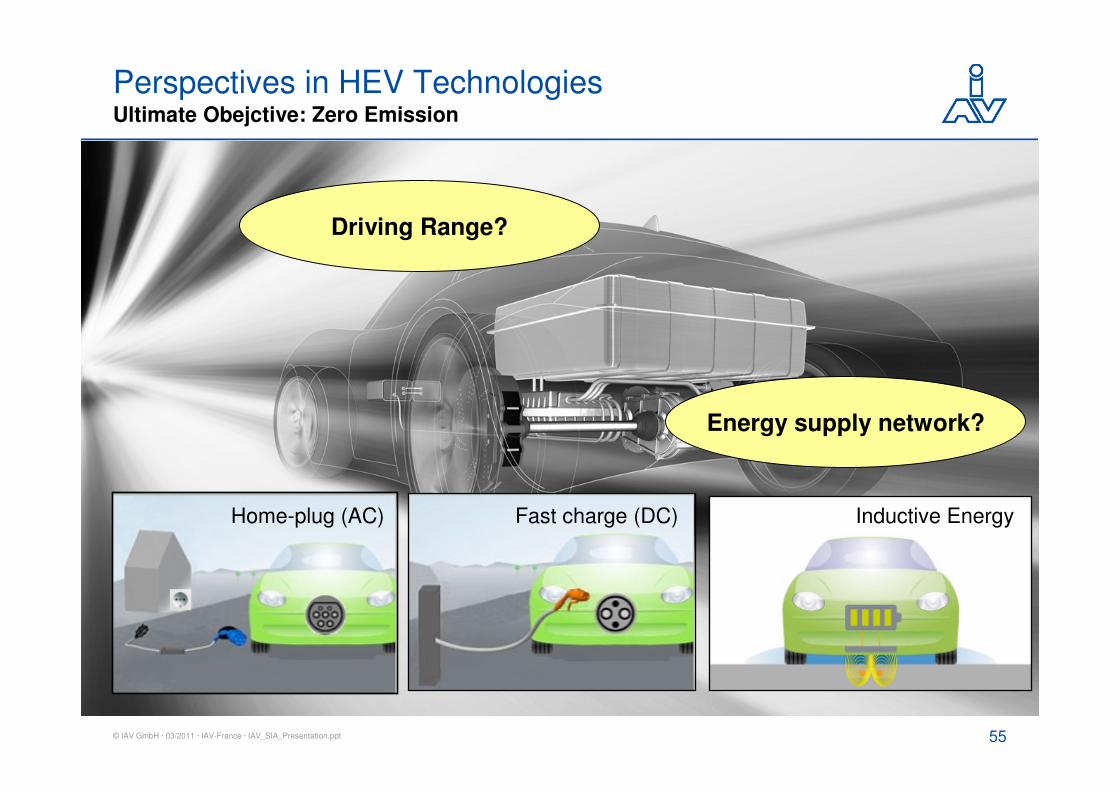
Perspectives in HEV TechnologiesUltimate Obejctive: Zero Emission
Driving Range?
Energy supply network?
Home-plug (AC) Fast charge (DC) Inductive Energy
© IAV GmbH · 03/2011 · IAV-France · IAV_SIA_Presentation.ppt 56
Perspectives in HEV TechnologiesUltimate Obejctive: Zero Emission
Driving Range?
Energy supply network?
Costs of ownership?
How to support E-mobility expansion on the market?
���� By keeping advantages of E-traction and to get rid of inconvenient.
© IAV GmbH · 03/2011 · IAV-France · IAV_SIA_Presentation.ppt 57
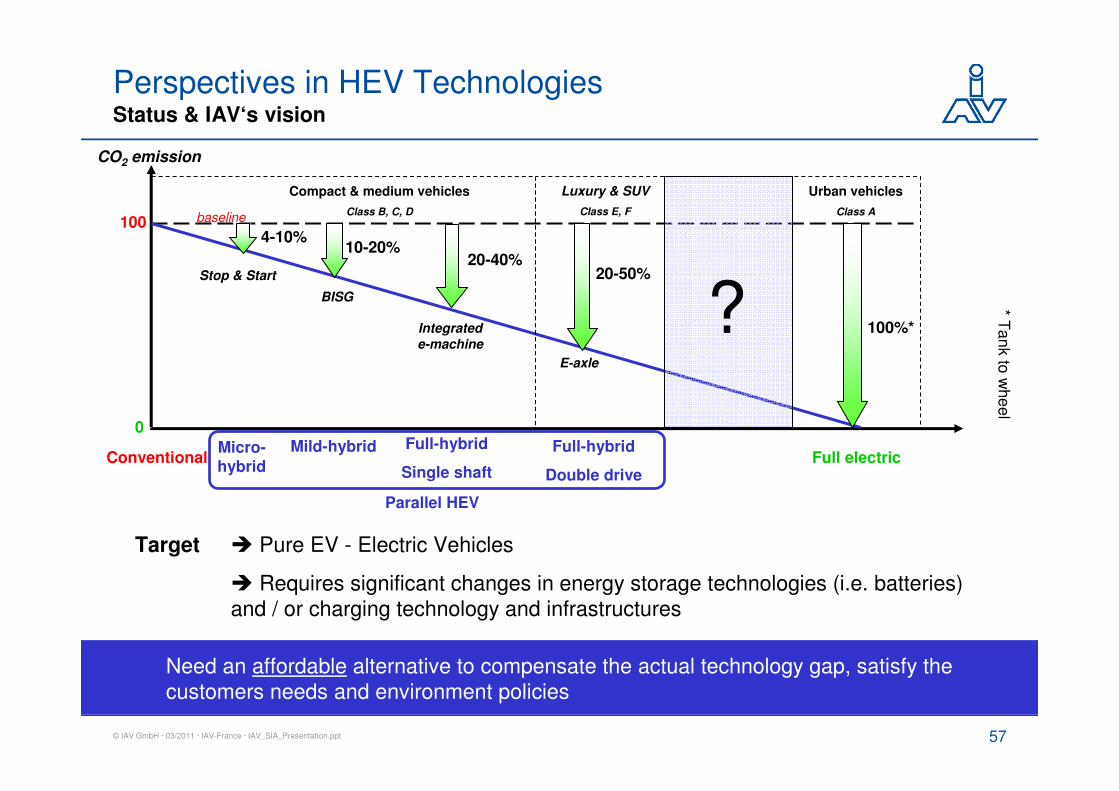
Perspectives in HEV TechnologiesStatus & IAV‘s vision
CO2 emission
baseline
Conventional
Luxury & SUV
Class E, F
Compact & medium vehicles
Class B, C, D
Urban vehicles
Class A100
0
Target � Pure EV - Electric Vehicles
� Requires significant changes in energy storage technologies (i.e. batteries)
and / or charging technology and infrastructures
Full electric
* Ta
nk to
whe
el
100%*
Micro-hybrid
Mild-hybrid Full-hybrid
Double drive
Full-hybrid
Single shaft
Parallel HEV
4-10%10-20%
20-50%20-40%
Stop & Start
E-axle
Integrated
e-machine
BISG
Need an affordable alternative to compensate the actual technology gap, satisfy the
customers needs and environment policies
?
© IAV GmbH · 03/2011 · IAV-France · IAV_SIA_Presentation.ppt 58
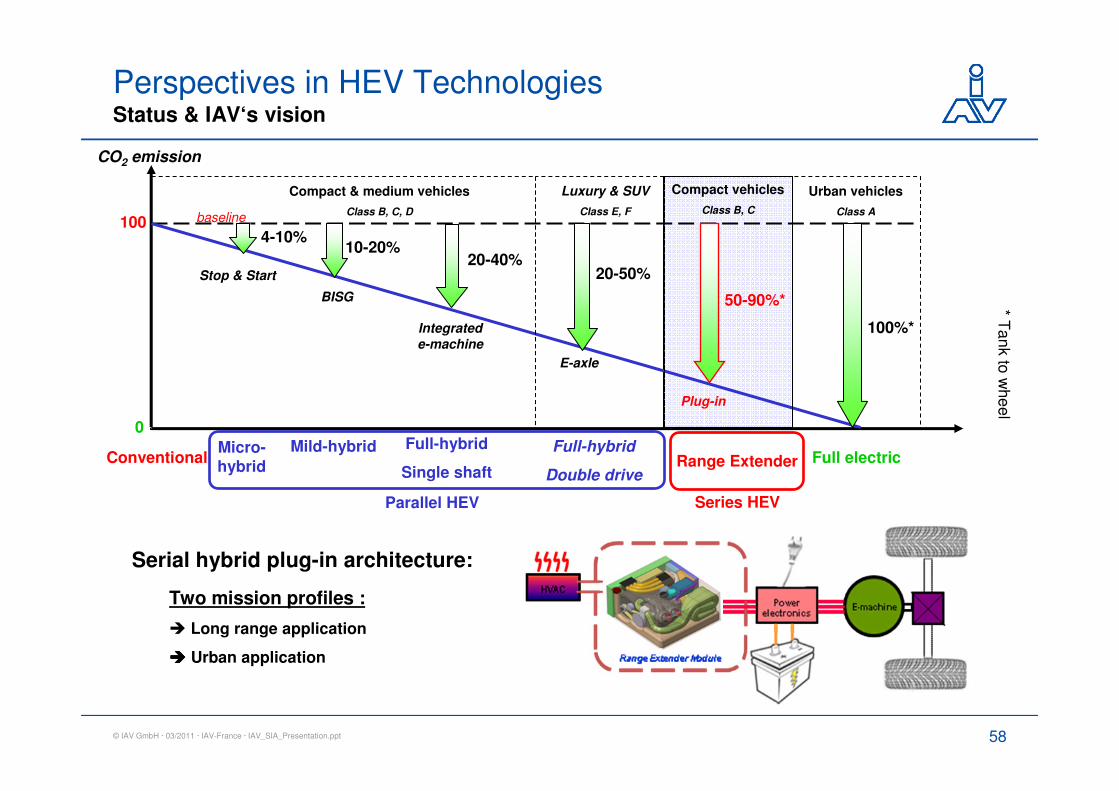
Perspectives in HEV TechnologiesStatus & IAV‘s vision
CO2 emission
baseline
Full electricConventional
* Ta
nk to
whe
el
Luxury & SUV
Class E, F
Compact & medium vehicles
Class B, C, D
Compact vehicles
Class B, C
Urban vehicles
Class A100
0
Micro-hybrid
Mild-hybrid Full-hybrid
Double drive
Full-hybrid
Single shaft
100%*
Parallel HEV
Range Extender
Series HEV
50-90%*
Plug-in
Serial hybrid plug-in architecture:
Two mission profiles :
� Long range application
���� Urban application
4-10%10-20%
20-50%20-40%
Stop & Start
E-axle
Integrated
e-machine
BISG
Excellence in Automotive R&D
Merci
Olivier Imberdis
IAV France
70-80 Rue des Champs Philippe - 92250 La Garenne-Colombes4 Rue Guynemer - 78280 Guyancourt