Embed Size (px)
Citation preview

力学力学力学力学力学力学力学力学III GAIII GA
工業力学演習工業力学演習工業力学演習工業力学演習工業力学演習工業力学演習工業力学演習工業力学演習 X5X5
解析力学解析力学解析力学解析力学解析力学解析力学解析力学解析力学 5X5X
15週目
立命館大学 機械システム系 2008年度 後期

今週今週今週今週のののの内容内容内容内容今週今週今週今週のののの内容内容内容内容後半全体のおさらい
•ラグランジュの運動方程式の導出
•2リンク機構のラグランジュの運動方程式
•リンク機構のエネルギー保存則
•慣性行列
•エネルギー、パワー、速度、力の関係
•外力が作用する場合の運動方程式
•粘性によるエネルギーの消散
•粘性
•拘束がある場合の運動方程式
•慣性・粘性・剛性と微分方程式
•ラグランジュの未定乗数法•拘束条件
•拘束力がある場合のエネルギー保存則
ラグランジュラグランジュラグランジュラグランジュのののの運動方程式運動方程式運動方程式運動方程式のののの導出導出導出導出ラグランジュラグランジュラグランジュラグランジュのののの運動方程式運動方程式運動方程式運動方程式のののの導出導出導出導出
が成り立つことの証明
(ハミルトンの原理、最小作用の原理)
0d
d=
∂∂
−
∂∂
xx
LL
t &
レジュメ p.44, 45

ラグランジュラグランジュラグランジュラグランジュのののの運動方程式運動方程式運動方程式運動方程式のののの導出導出導出導出ラグランジュラグランジュラグランジュラグランジュのののの運動方程式運動方程式運動方程式運動方程式のののの導出導出導出導出
が成り立つことの証明
(ハミルトンの原理、最小作用の原理)
0d
d=
∂∂
−
∂∂
xx
LL
t &
レジュメ p.44, 45
一般化ダランベールの原理
から出発し、変分問題に帰着
( ) 01
=⋅−=∑=
iii xxf δδn
i
imW &&
手順

2222リンクリンクリンクリンク2222リンクリンクリンクリンク機構機構機構機構機構機構機構機構ののののののののラグランジュラグランジュラグランジュラグランジュのののの運動方程式運動方程式運動方程式運動方程式ラグランジュラグランジュラグランジュラグランジュのののの運動方程式運動方程式運動方程式運動方程式運動エネルギー
q1
q2
lg1
lg2
l1
m1 I1
m2 I2xcom2
xcom1
qMq &&TK
2
1=
M: 慣性行列

2222リンクリンクリンクリンク2222リンクリンクリンクリンク機構機構機構機構機構機構機構機構ののののののののラグランジュラグランジュラグランジュラグランジュのののの運動方程式運動方程式運動方程式運動方程式ラグランジュラグランジュラグランジュラグランジュのののの運動方程式運動方程式運動方程式運動方程式運動エネルギー
運動方程式
q1
q2
lg1
lg2
l1
m1 I1
m2 I2xcom2
xcom1
qMq &&TK
2
1=
0
d
d
=+=
∂∂
−+=∂∂
−
∂∂
hqM
qqMqM
&&
&&&&&
KKK
t
M: 慣性行列

慣性行列M
∑=
=2
1i
T
comiicomi JMJM
qJx comicomi&& =
慣性行列慣性行列慣性行列慣性行列慣性行列慣性行列慣性行列慣性行列
q1
q2
lg1
lg2
l1
m1 I1
m2 I2xcom2
xcom1
: iリンク目の重心の速度comix&
=
i
i
i
I
m
m
00
00
00
iM
一定の規則に従う(決定論的)にもかかわらず、
予測不能な複雑な振る舞いをすることを
カオスと呼ぶ。
非線形微分方程式非線形微分方程式非線形微分方程式非線形微分方程式ととととカオスカオスカオスカオス非線形微分方程式非線形微分方程式非線形微分方程式非線形微分方程式ととととカオスカオスカオスカオス
0=++ ghqM &&例
一定の規則(非線形微分方程式) カオス
qは複雑に振舞う

ブラジルでの蝶の羽ばたきがテキサスで
トルネードを引き起こすこと
バタフライバタフライバタフライバタフライ効果効果効果効果バタフライバタフライバタフライバタフライ効果効果効果効果
•小さな初期条件の違いが、
未来に大きな影響を及ぼすという意味
•天気予報が当たらない理由

2222リンクリンクリンクリンク機構機構機構機構ののののエネルギーエネルギーエネルギーエネルギー保存則保存則保存則保存則2222リンクリンクリンクリンク機構機構機構機構ののののエネルギーエネルギーエネルギーエネルギー保存則保存則保存則保存則
2リンク機構に保存力だけが作用する場合、
全エネルギーは時間によって変化しない

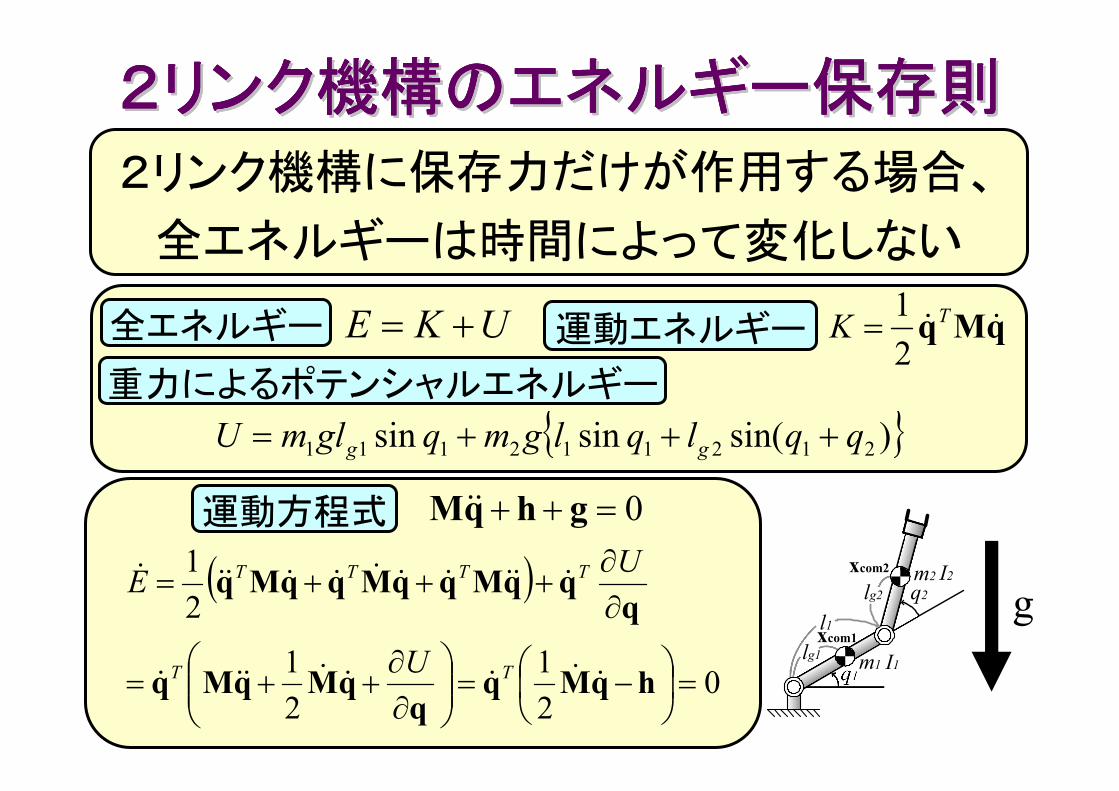
2222リンクリンクリンクリンク機構機構機構機構ののののエネルギーエネルギーエネルギーエネルギー保存則保存則保存則保存則2222リンクリンクリンクリンク機構機構機構機構ののののエネルギーエネルギーエネルギーエネルギー保存則保存則保存則保存則
2リンク機構に保存力だけが作用する場合、
全エネルギーは時間によって変化しない
q1
q2
lg1
lg2
l1
m1 I1
m2 I2xcom2
xcom1
g
{ })sin(sinsin 212112111 qqlqlgmqglmU gg +++=
qMq &&TK
2
1=運動エネルギー
重力によるポテンシャルエネルギー
UKE +=全エネルギー
運動方程式 0=++ ghqM &&
2222リンクリンクリンクリンク機構機構機構機構ののののエネルギーエネルギーエネルギーエネルギー保存則保存則保存則保存則2222リンクリンクリンクリンク機構機構機構機構ののののエネルギーエネルギーエネルギーエネルギー保存則保存則保存則保存則
2リンク機構に保存力だけが作用する場合、
全エネルギーは時間によって変化しない
q1
q2
lg1
lg2
l1
m1 I1
m2 I2xcom2
xcom1
g
{ })sin(sinsin 212112111 qqlqlgmqglmU gg +++=
qMq &&TK
2
1=運動エネルギー
重力によるポテンシャルエネルギー
UKE +=全エネルギー
( )
02
1
2
1
2
1
=
−=
∂∂
++=
∂∂
+++=
hqMqq
qMqMq
qqqMqqMqqMq
&&&&&&&&
&&&&&&&&&&&
TT
TTTT
U
UE
運動方程式 0=++ ghqM &&

エネルギーエネルギーエネルギーエネルギー、、、、パワーパワーパワーパワー、、、、速度速度速度速度、、、、力力力力のののの関係関係関係関係エネルギーエネルギーエネルギーエネルギー、、、、パワーパワーパワーパワー、、、、速度速度速度速度、、、、力力力力のののの関係関係関係関係全エネルギー (単位は [J])
エネルギーの時間微分はパワー (単位は [W])
力 [N] ×速度 [m/s] = パワー [W]
(回転系では、トルク [Nm] ×角速度 [rad/s] = パワー [W])

エネルギーエネルギーエネルギーエネルギー、、、、パワーパワーパワーパワー、、、、速度速度速度速度、、、、力力力力のののの関係関係関係関係エネルギーエネルギーエネルギーエネルギー、、、、パワーパワーパワーパワー、、、、速度速度速度速度、、、、力力力力のののの関係関係関係関係全エネルギー (単位は [J])
エネルギーの時間微分はパワー (単位は [W])
22
2
1
2
1kxxmE += &
( )kxxmxE += &&&&
速度 力
力 [N] ×速度 [m/s] = パワー [W]
(回転系では、トルク [Nm] ×角速度 [rad/s] = パワー [W])
例
エネルギー
パワー
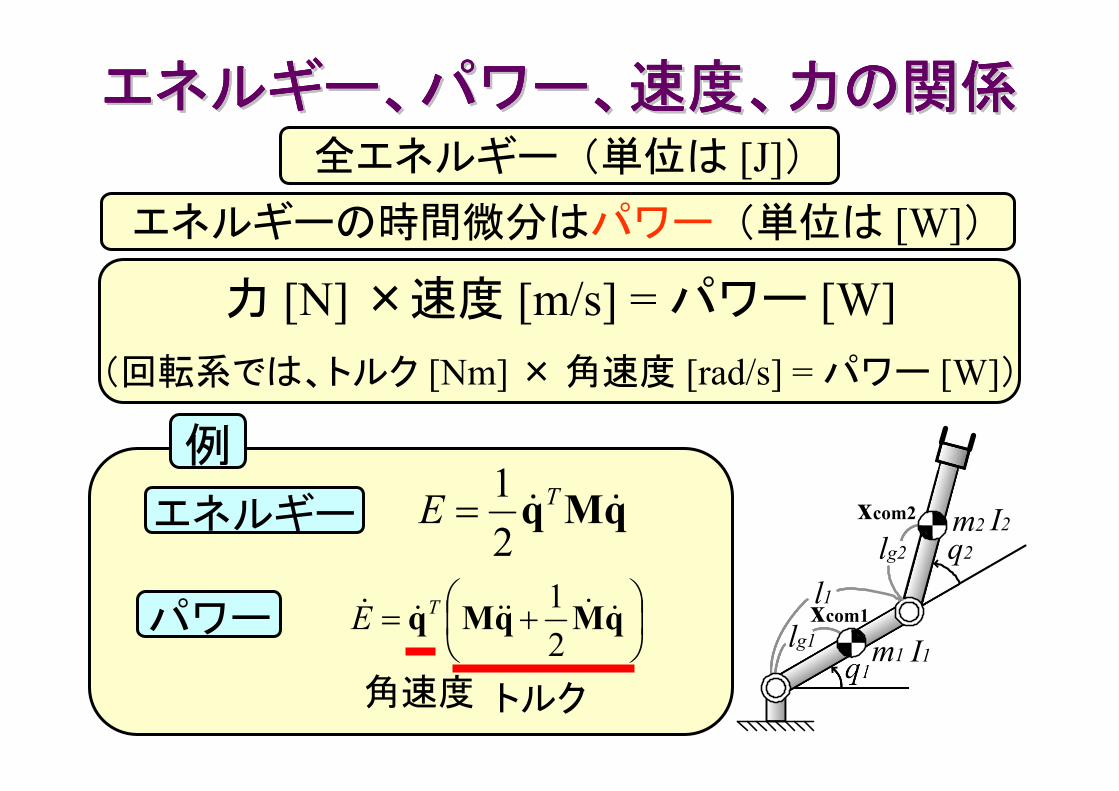
エネルギーエネルギーエネルギーエネルギー、、、、パワーパワーパワーパワー、、、、速度速度速度速度、、、、力力力力のののの関係関係関係関係エネルギーエネルギーエネルギーエネルギー、、、、パワーパワーパワーパワー、、、、速度速度速度速度、、、、力力力力のののの関係関係関係関係全エネルギー (単位は [J])
エネルギーの時間微分はパワー (単位は [W])
+= qMqMq &&&&&&
2
1TE
角速度 トルク
力 [N] ×速度 [m/s] = パワー [W]
(回転系では、トルク [Nm] ×角速度 [rad/s] = パワー [W])
例
エネルギー
パワーq1
q2
lg1
lg2
l1
m1 I1
m2 I2xcom2
xcom1
qMq &&TE
2
1=
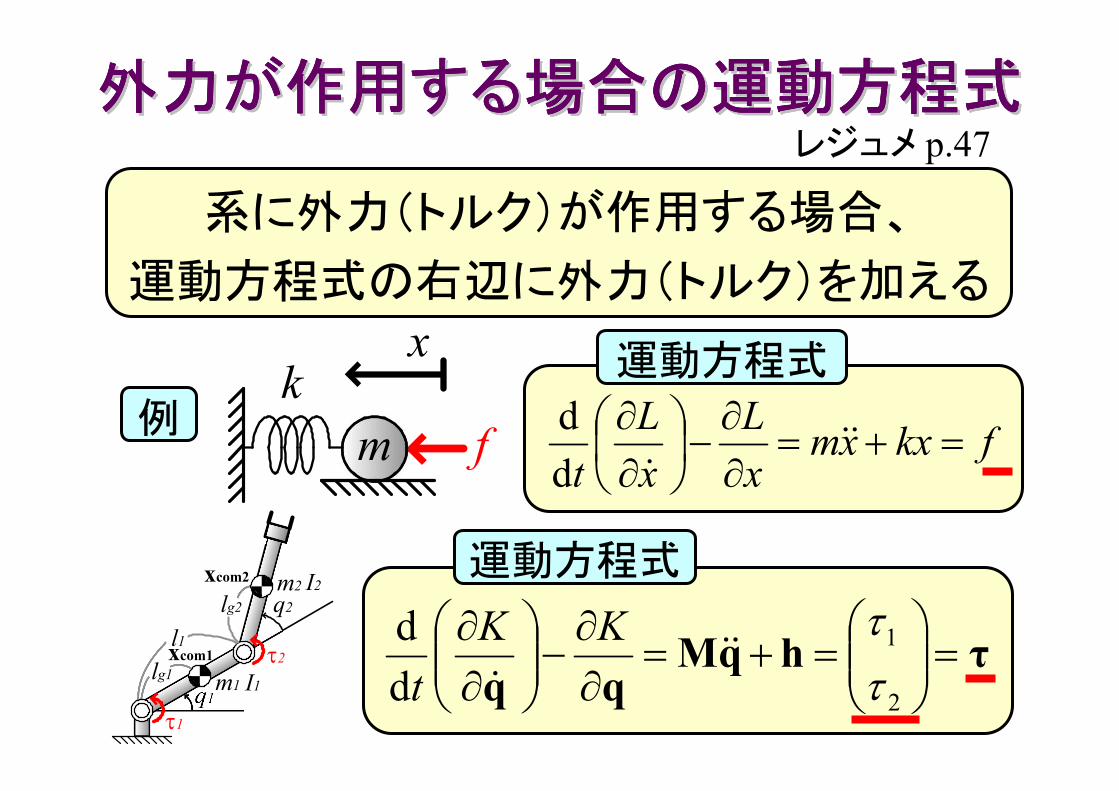
外力外力外力外力がががが作用作用作用作用するするするする場合場合場合場合のののの運動方程式運動方程式運動方程式運動方程式外力外力外力外力がががが作用作用作用作用するするするする場合場合場合場合のののの運動方程式運動方程式運動方程式運動方程式レジュメ p.47
系に外力(トルク)が作用する場合、
運動方程式の右辺に外力(トルク)を加える
外力外力外力外力がががが作用作用作用作用するするするする場合場合場合場合のののの運動方程式運動方程式運動方程式運動方程式外力外力外力外力がががが作用作用作用作用するするするする場合場合場合場合のののの運動方程式運動方程式運動方程式運動方程式レジュメ p.47
系に外力(トルク)が作用する場合、
運動方程式の右辺に外力(トルク)を加える
fkxxmx
L
x
L
t=+=
∂∂
−
∂∂
&&&d
d例
x
m
k
f
運動方程式
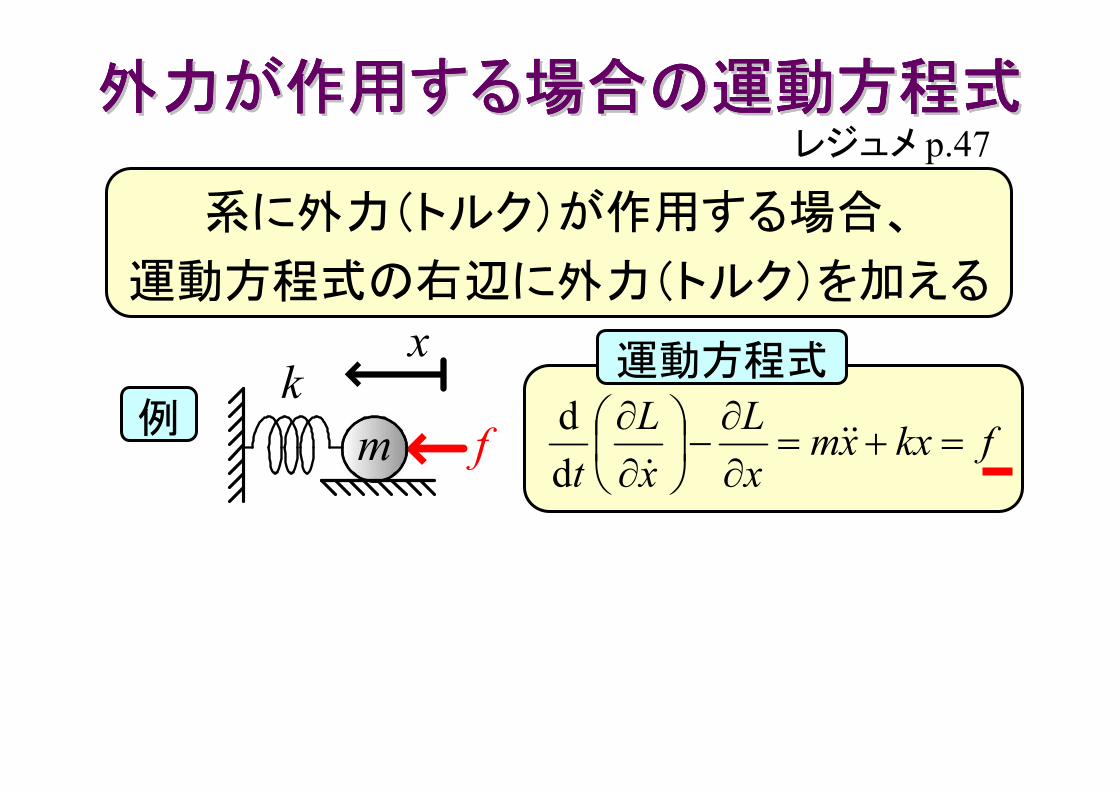
外力外力外力外力がががが作用作用作用作用するするするする場合場合場合場合のののの運動方程式運動方程式運動方程式運動方程式外力外力外力外力がががが作用作用作用作用するするするする場合場合場合場合のののの運動方程式運動方程式運動方程式運動方程式レジュメ p.47
系に外力(トルク)が作用する場合、
運動方程式の右辺に外力(トルク)を加える
fkxxmx
L
x
L
t=+=
∂∂
−
∂∂
&&&d
d
τhqMqq
=
=+=
∂∂
−
∂∂
2
1
d
d
τ
τ&&
&
KK
t
例
x
m
k
f
q1
q2
lg1
lg2
l1
m1 I1
m2 I2xcom2
xcom1
τ1
τ2
運動方程式
運動方程式

粘性粘性粘性粘性粘性粘性粘性粘性速度と逆方向に速度に比例した
力・トルクを粘性力・トルクと呼ぶ
例
x
m
k
-dx
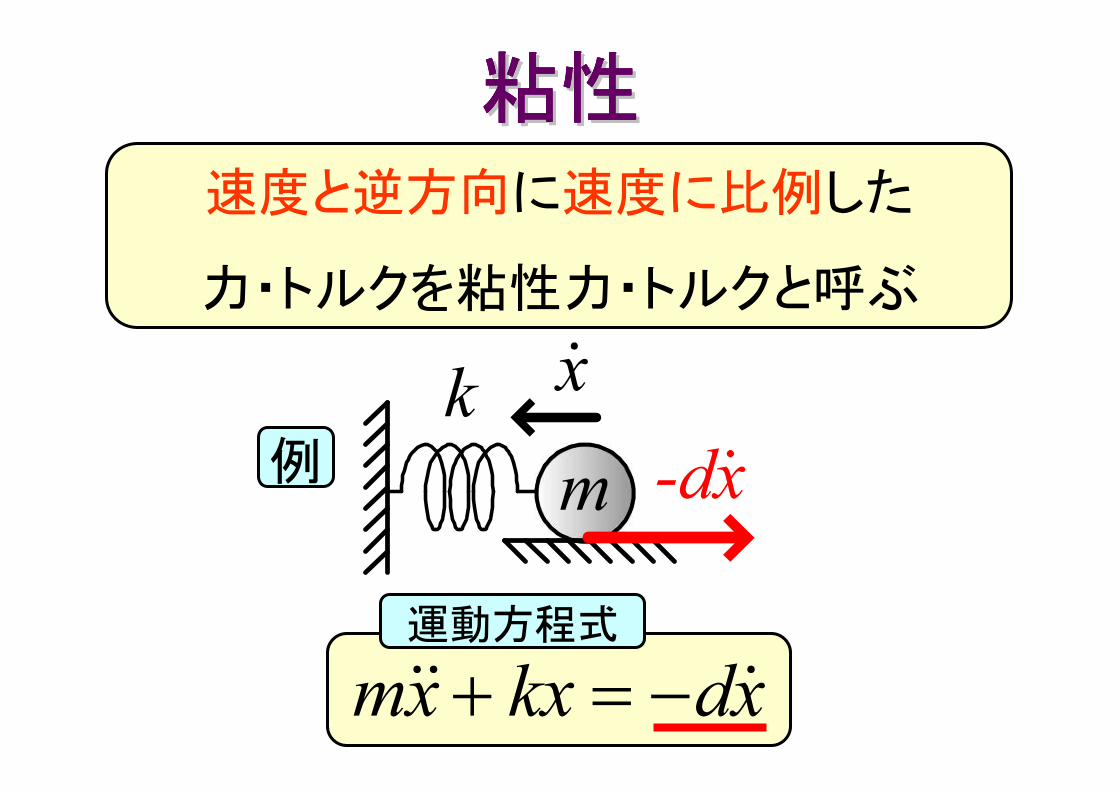
粘性粘性粘性粘性粘性粘性粘性粘性速度と逆方向に速度に比例した
力・トルクを粘性力・トルクと呼ぶ
xdkxxm &&& −=+
例
運動方程式
x
m
k
-dx

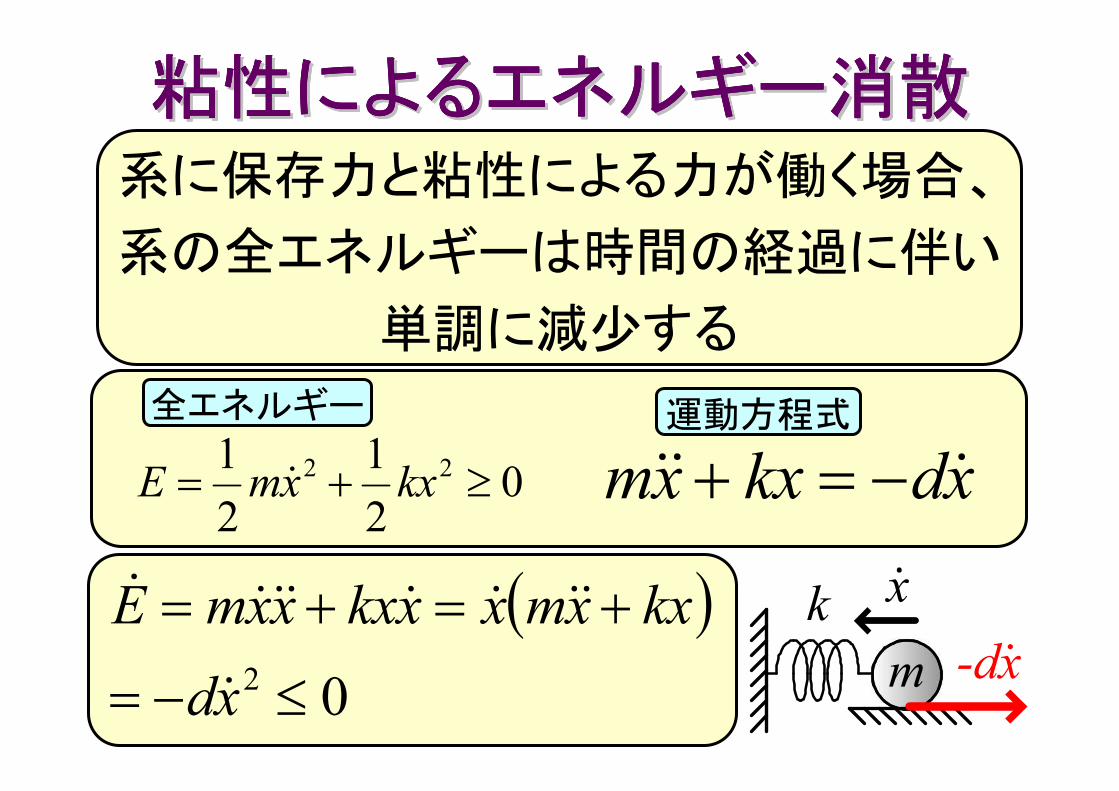
粘性粘性粘性粘性粘性粘性粘性粘性によるによるによるによるエネルギーエネルギーエネルギーエネルギー消散消散消散消散によるによるによるによるエネルギーエネルギーエネルギーエネルギー消散消散消散消散系に保存力と粘性による力が働く場合、
系の全エネルギーは時間の経過に伴い
単調に減少する
t
Ex
m
k
-dx

粘性粘性粘性粘性粘性粘性粘性粘性によるによるによるによるエネルギーエネルギーエネルギーエネルギー消散消散消散消散によるによるによるによるエネルギーエネルギーエネルギーエネルギー消散消散消散消散系に保存力と粘性による力が働く場合、
系の全エネルギーは時間の経過に伴い
単調に減少する
02
1
2
1 22 ≥+= kxxmE &
x
m
k
-dx
全エネルギー 運動方程式
xdkxxm &&& −=+
粘性粘性粘性粘性粘性粘性粘性粘性によるによるによるによるエネルギーエネルギーエネルギーエネルギー消散消散消散消散によるによるによるによるエネルギーエネルギーエネルギーエネルギー消散消散消散消散
( )02 ≤−=
+=+=
xd
kxxmxxkxxxmE
&
&&&&&&&&
系に保存力と粘性による力が働く場合、
系の全エネルギーは時間の経過に伴い
単調に減少する
02
1
2
1 22 ≥+= kxxmE &
x
m
k
-dx
全エネルギー 運動方程式
xdkxxm &&& −=+

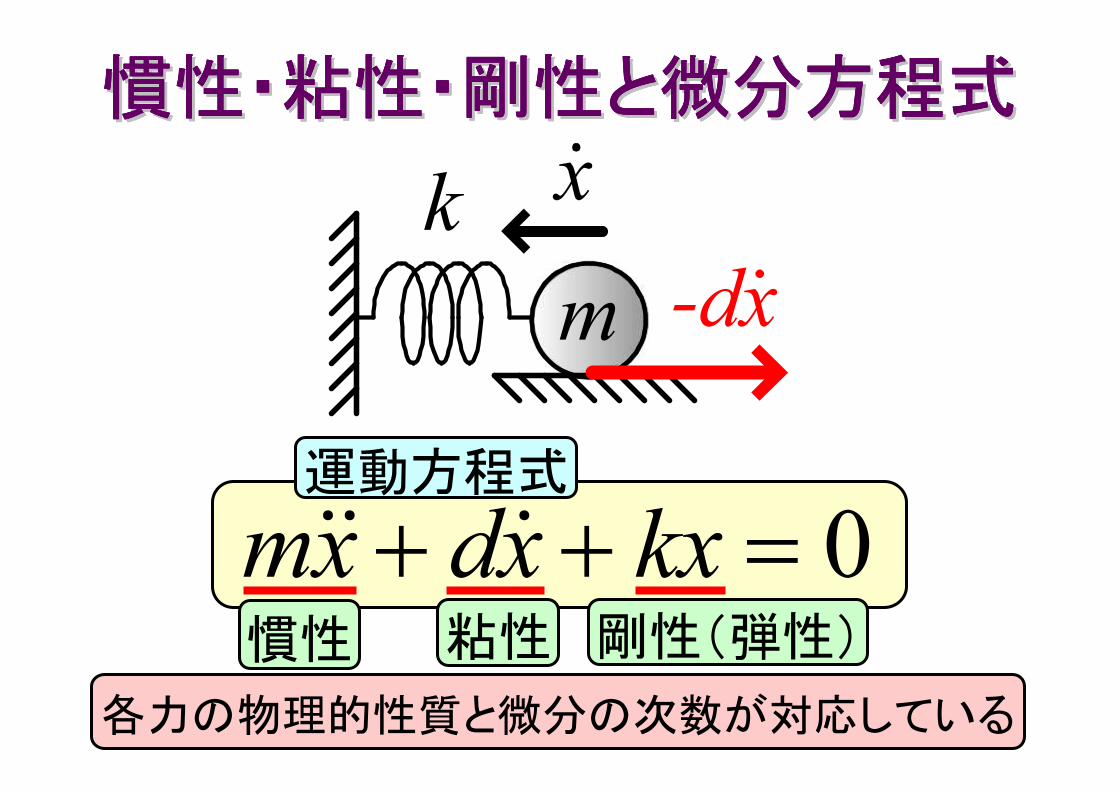
慣性慣性慣性慣性・・・・粘性粘性粘性粘性・・・・剛性剛性剛性剛性とととと微分方程式微分方程式微分方程式微分方程式慣性慣性慣性慣性・・・・粘性粘性粘性粘性・・・・剛性剛性剛性剛性とととと微分方程式微分方程式微分方程式微分方程式
0=++ kxxdxm &&&運動方程式
x
m
k
-dx
慣性慣性慣性慣性・・・・粘性粘性粘性粘性・・・・剛性剛性剛性剛性とととと微分方程式微分方程式微分方程式微分方程式慣性慣性慣性慣性・・・・粘性粘性粘性粘性・・・・剛性剛性剛性剛性とととと微分方程式微分方程式微分方程式微分方程式
0=++ kxxdxm &&&運動方程式
x
m
k
-dx
慣性 粘性 剛性(弾性)
各力の物理的性質と微分の次数が対応している

拘束条件拘束条件拘束条件拘束条件拘束条件拘束条件拘束条件拘束条件
幾何学的・力学的拘束を
関数 で表したもの
レジュメ p.49
0)( =xxf &,

拘束条件拘束条件拘束条件拘束条件拘束条件拘束条件拘束条件拘束条件
幾何学的・力学的拘束を
関数 で表したもの
三平方の定理
拘束条件 (位置)
例
レジュメ p.49
m (x,y)
(xr,yr)
( ) ( )22
rr yyxxr −+−=
( ) ( ) 0),(22 =−−+−= ryyxxyxf rr
0)( =xxf &,

拘束条件拘束条件拘束条件拘束条件拘束条件拘束条件拘束条件拘束条件のののの例例例例のののの例例例例
q1
q2
x
lkabe
π4 [rad]
0),( 2121 =+= qqqqf &&&
0),( 2121 =+= qqqqf &&&&&&
位置
速度
加速度
04
sin2),( 2121 =−+=π
kabelqqqqf

拘束条件拘束条件拘束条件拘束条件拘束条件拘束条件拘束条件拘束条件のののの例例例例のののの例例例例
q1
q2
x
lkabe
π4 [rad]
04
sin2),( 2121 =−+=π
kabelqqqqf
0),( 2121 =+= qqqqf &&&
0),( 2121 =+= qqqqf &&&&&&
l2
l1
q1
q2
f
x
ykabe
0),( 21 =−= kabeyyqqf
)sin(sin 21211 qqlqly ++=
位置
速度
加速度
位置
速度
加速度
0),( 21 == yqqf &&
qJy&&&&& =+++= )sin()(sin 21212111 qqqqlqqly
0),( 21 == yqqf &&&&
qJqJ yy&&&&&& +=y

ラグランジュラグランジュラグランジュラグランジュのののの未定乗数法未定乗数法未定乗数法未定乗数法ラグランジュラグランジュラグランジュラグランジュのののの未定乗数法未定乗数法未定乗数法未定乗数法拘束条件 f = 0 がある場合、関数 g(x) が
極値をとる条件は である( ) 0=⋅+∂∂
fλxg
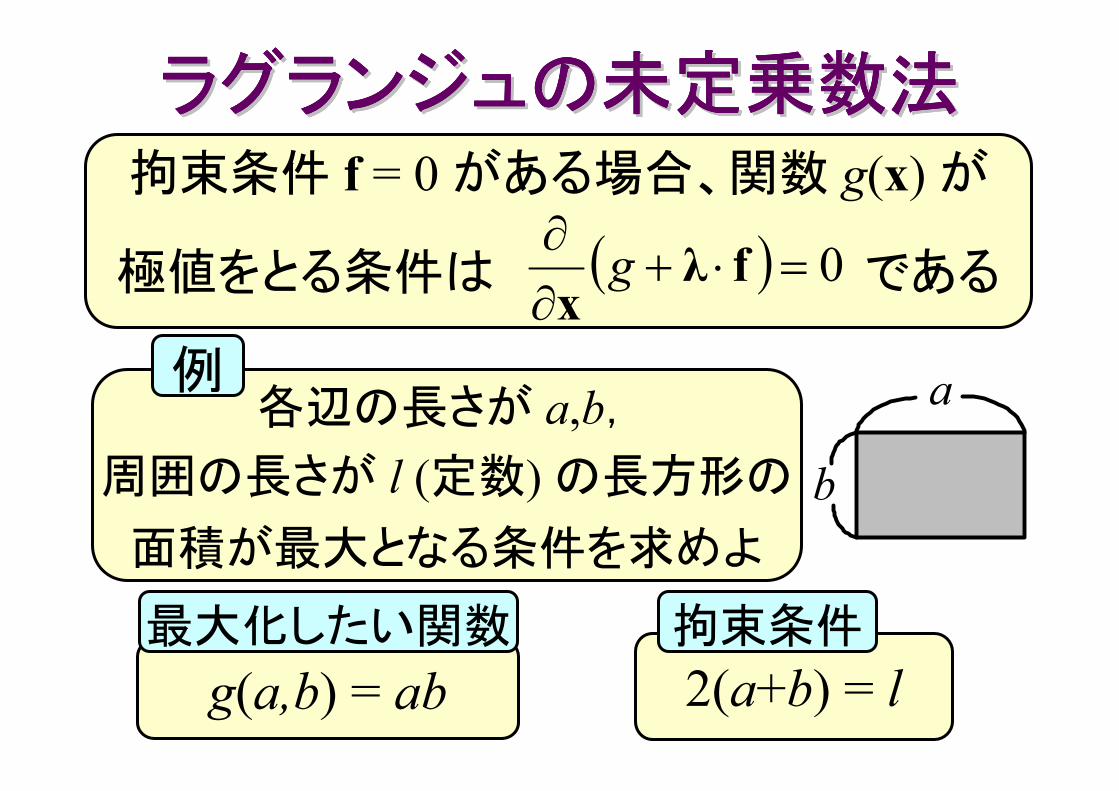
ラグランジュラグランジュラグランジュラグランジュのののの未定乗数法未定乗数法未定乗数法未定乗数法ラグランジュラグランジュラグランジュラグランジュのののの未定乗数法未定乗数法未定乗数法未定乗数法拘束条件 f = 0 がある場合、関数 g(x) が
極値をとる条件は である
各辺の長さが a,b,
周囲の長さが l (定数) の長方形の
面積が最大となる条件を求めよ
例
g(a,b) = ab 2(a+b) = l
最大化したい関数 拘束条件
a
b
( ) 0=⋅+∂∂
fλxg

ラグランジュラグランジュラグランジュラグランジュのののの未定乗数法未定乗数法未定乗数法未定乗数法ラグランジュラグランジュラグランジュラグランジュのののの未定乗数法未定乗数法未定乗数法未定乗数法拘束条件 f = 0 がある場合、関数 g(x) が
極値をとる条件は である
例 a
b
( ) 0=⋅+∂∂
fλxg
極値の条件
( )
( ) 0
0
=+∂∂
=+∂∂
fgb
fga
λ
λ
( ) 02
02
02
=−+
=+
=+
∴
lba
a
b
λλ
λ:ラグランジュの
未定乗数4,
4,
8
lb
la
l==−=∴λ

f(x) = 0
ラグランジュラグランジュラグランジュラグランジュのののの未定乗数法未定乗数法未定乗数法未定乗数法によるによるによるによるラグランジュラグランジュラグランジュラグランジュのののの未定乗数法未定乗数法未定乗数法未定乗数法によるによるによるによる拘束拘束拘束拘束があるがあるがあるがある場合場合場合場合のののの運動方程式運動方程式運動方程式運動方程式のののの導出導出導出導出拘束拘束拘束拘束があるがあるがあるがある場合場合場合場合のののの運動方程式運動方程式運動方程式運動方程式のののの導出導出導出導出
レジュメ p. 50
L = K - U極値を求めたい関数 拘束条件
f(x) = 0
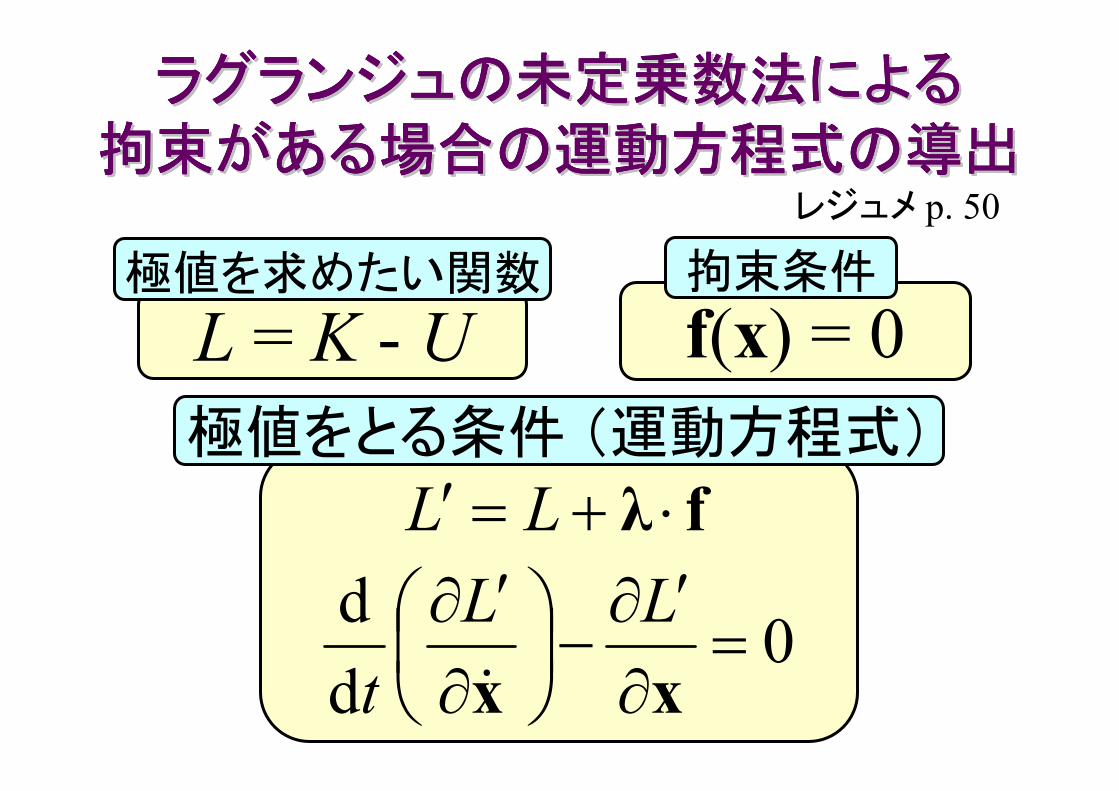
ラグランジュラグランジュラグランジュラグランジュのののの未定乗数法未定乗数法未定乗数法未定乗数法によるによるによるによるラグランジュラグランジュラグランジュラグランジュのののの未定乗数法未定乗数法未定乗数法未定乗数法によるによるによるによる拘束拘束拘束拘束があるがあるがあるがある場合場合場合場合のののの運動方程式運動方程式運動方程式運動方程式のののの導出導出導出導出拘束拘束拘束拘束があるがあるがあるがある場合場合場合場合のののの運動方程式運動方程式運動方程式運動方程式のののの導出導出導出導出
レジュメ p. 50
L = K - U極値を求めたい関数 拘束条件
極値をとる条件 (運動方程式)
0d
d=
∂
′∂−
∂
′∂xx
LL
t &
fλ ⋅+=′ LL

ラグランジュラグランジュラグランジュラグランジュのののの未定乗数未定乗数未定乗数未定乗数ラグランジュラグランジュラグランジュラグランジュのののの未定乗数未定乗数未定乗数未定乗数のののの物理的意味物理的意味物理的意味物理的意味のののの物理的意味物理的意味物理的意味物理的意味
拘束条件が位置のとき、ラグランジュの未定乗数は運動方程式において力を表す

ラグランジュラグランジュラグランジュラグランジュのののの未定乗数未定乗数未定乗数未定乗数ラグランジュラグランジュラグランジュラグランジュのののの未定乗数未定乗数未定乗数未定乗数のののの物理的意味物理的意味物理的意味物理的意味のののの物理的意味物理的意味物理的意味物理的意味
拘束条件が位置のとき、ラグランジュの未定乗数は運動方程式において力を表す
運動方程式
0=−+ λTyJhqM &&l2
l1
q1
q2
f
x
ykabe
式の次元はトルク
λは力
ヤコビ行列
=
λ0
f
例
拘束拘束拘束拘束があるがあるがあるがある場合場合場合場合ののののエネルギーエネルギーエネルギーエネルギー保存則保存則保存則保存則拘束拘束拘束拘束があるがあるがあるがある場合場合場合場合ののののエネルギーエネルギーエネルギーエネルギー保存則保存則保存則保存則
拘束力によって
系の全エネルギーは変化しない

拘束拘束拘束拘束があるがあるがあるがある場合場合場合場合ののののエネルギーエネルギーエネルギーエネルギー保存則保存則保存則保存則拘束拘束拘束拘束があるがあるがあるがある場合場合場合場合ののののエネルギーエネルギーエネルギーエネルギー保存則保存則保存則保存則
例
拘束力が系に加えるパワー P
全エネルギー qMq &&TE
2
1=
運動方程式 0=−+ λTyJhqM &&
( ) 0=== qJJq yy&& λλTTP
速度の拘束条件 0== qJ y&&y
拘束力によって
系の全エネルギーは変化しない
q1
q2
lg1
lg2
l1
m1 I1
m2 I2xcom2
xcom1

拘束拘束拘束拘束があるがあるがあるがある場合場合場合場合ののののエネルギーエネルギーエネルギーエネルギー保存則保存則保存則保存則拘束拘束拘束拘束があるがあるがあるがある場合場合場合場合ののののエネルギーエネルギーエネルギーエネルギー保存則保存則保存則保存則
02
1
2
1==
+−=
+= PE TTT λyJhqMqqMqMq &&&&&&&&&
例
拘束力が系に加えるパワー P
全エネルギー qMq &&TE
2
1=
運動方程式 0=−+ λTyJhqM &&
( ) 0=== qJJq yy&& λλTTP
速度の拘束条件 0== qJ y&&y
拘束力によって
系の全エネルギーは変化しない
q1
q2
lg1
lg2
l1
m1 I1
m2 I2xcom2
xcom1