Embed Size (px)
Citation preview

KINEMATIKA DAN DINAMIKA TEKNIK
• MOBILITAS DARI MEKANISME
• HUKUM GRASHOF

KINEMATIKA DAN DINAMIKA
SATUAN
2

KINEMATIKA DAN DINAMIKA
ILMU TEKNIK
3
Definisi Reuleaux:
Mesin: kombinasi dari hambatan tubuh benda sehingga mengalami pengaturan gaya mekanik yang dapat melakukan kerja dengan gerakan tertentu yang telah ditentukan
Mekanisme: kombinasi tahanan tubuh, yang dihubungkan dengan pengait (yang bisa diubah), untuk membentuk rantai kinematik yang bertujuan untuk menstransformasi gerak
Struktur: mirip dengan mekanisme, tapi tujuannya bukan untuk menghasilkan gerak atau kerja. Struktur dibuat dengan masksud agar benda menjadi rigid/kokoh.

KINEMATIKA DAN DINAMIKA
ILMU TEKNIK
4

KINEMATIKA DAN DINAMIKA
ILMU TEKNIK
5

KINEMATIKA DAN DINAMIKA
DEGREE OF FREEDOM (DOF) ATAU MOBILITY
Mobilitas sistem mekanik dapat diklasifikasina berdasarkan jumlah DOF yang mungkin. Sistim DOF adalah jumlah parameter bebas yang secara khusus mendefinisikan ruang dan waktu (translasi atau rotasi)
Contoh: Sistim pensil yang berada di suatu bidang memiliki 3 DOF
6

KINEMATIKA DAN DINAMIKA 7
DOF benda padat di ruang DOF benda padat di bidang
DEGREE OF FREEDOM (DOF) ATAU MOBILITY

KINEMATIKA DAN DINAMIKA 8
DEGREE OF FREEDOM (DOF) ATAU MOBILITY

KINEMATIKA DAN DINAMIKA
JENIS GERAK
MURNI ROTASI
9
Reference line
Reference line

KINEMATIKA DAN DINAMIKA
JENIS GERAK
MURNI TRANSLASI
10

KINEMATIKA DAN DINAMIKA
JENIS GERAK
Gerak Kompleks: Rotasi + Translasi
11
q

KINEMATIKA DAN DINAMIKA
TAUTAN (LINK), GABUNGAN DAN RANTAI MEKANIK
Link adalah benda rigid yang setidaknya terdiri dari 2 titik penghubung ke link yang lain
12

KINEMATIKA DAN DINAMIKA
TAUTAN (LINK), GABUNGAN DAN RANTAI MEKANIK
Gabungan atau pasangan kinematis adalah hubungan diantara 2 atau lebih link.
Pasangan Kinematis:
Lower pair (kontak permukaan): adalah gabungan antara permukaan kontak dengan elemen pasangan.
Higher pair (kontak titik atau garis): adalah gabungan antara titik atau garis dengan elemen pasangan.
13

KINEMATIKA DAN DINAMIKA
TAUTAN (LINK), GABUNGAN DAN RANTAI MEKANIK
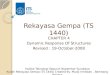
Lower Pair:
14
3-D Mechanism
Name (symbol) DOF Contains
Revolute (R) 1 R
Prismatic (P) 1 P
Screw or Helical (H) 1 R + P
Cylindric (C) 2 R+P
Spherical (S) 3 R+R+R
Planar or Flat (F) 3 R+P+P
Planar Mechanism
DOF: Degree of Freedom

KINEMATIKA DAN DINAMIKA
Revolute (R): Rotasi penuh pada 1 titik
15
Dq

KINEMATIKA DAN DINAMIKA
Prismatic (P): translasi penuh pada 1 garis
16
DX

KINEMATIKA DAN DINAMIKA 17
Helical (H):

KINEMATIKA DAN DINAMIKA 18
Cylindric (C) :

KINEMATIKA DAN DINAMIKA 19
Spherical (S):

KINEMATIKA DAN DINAMIKA 20
Flat (F) :

KINEMATIKA DAN DINAMIKA 21
Roll-slide (Setengah) joint
DX
Dq
Linkage against Plane (Force close)

KINEMATIKA DAN DINAMIKA 22
Higher Pair: 2 DOF
Pin in Slot (Form Close)
Dq
DX

KINEMATIKA DAN DINAMIKA
GERAK PADA BIDANG (PLANAR MOTION)
Lower pair atau Full joint : 1 DOF joint
Higher pair, half joint : > 1 DOF, roll-slider
Joint order = Jumlah link - 1
23
Second order pin joint
First order pin jointFirst order pin joint
Second order pin joint

KINEMATIKA DAN DINAMIKA
MENENTUKAN DEGREE OF FREEDOM
Degree of Freedom (DOF): Jumlah koordinat bebas yang diperlukan untuk mendefinisikan posisi.
Dalam Mekanisme Bidang:
1 link pada bidang memiliki 3 DOF
24

KINEMATIKA DAN DINAMIKA
MENENTUKAN DEGREE OF FREEDOM
2 link pada bidang memiliki 6 DOF
25
Dx2
Dy2Dy1
Dx1Dq1 Dq2

KINEMATIKA DAN DINAMIKA
MENENTUKAN DEGREE OF FREEDOM
2 link yang dihubungkan memiliki 4 DOF
26
Dx
Dy
Dq1 Dq2

KINEMATIKA DAN DINAMIKA
MENENTUKAN DEGREE OF FREEDOM
2 link yang dihubungkan dengan roll-slide (setengah) memiliki 5 DOF
27
Dy
Dq1
Dq2
Dx2
Dx1

KINEMATIKA DAN DINAMIKA
MENENTUKAN DEGREE OF FREEDOM
Persamaan Gruebler
DOF atau M = 3L – 2J – 3G
Dimana:
M= DOF atau mobilitas
L= jumlah links
J= jumlah penghubung (joints)
G= jumlah link ground (selalu = 1)
M = 3(L - 1) – 2J
28

KINEMATIKA DAN DINAMIKA
MENENTUKAN DEGREE OF FREEDOM
Modifikasi oleh Kutzbatch menjadi:
M = 3(L – 1)– 2J1 – J2
Dimana:
M= DOF atau mobilitas
L= jumlah links
J1= jumlah DOF pada joint (kondisi full)
J2= jumlah DOF pada joint (kondisi setengah)
Full Joint = 1
Setengah Joint = 0.5
29

KINEMATIKA DAN DINAMIKA
MENENTUKAN DEGREE OF FREEDOM
30

KINEMATIKA DAN DINAMIKA
MENENTUKAN DEGREE OF FREEDOM
31

KINEMATIKA DAN DINAMIKA
CONTOH
32

KINEMATIKA DAN DINAMIKA
CONTOH
33

KINEMATIKA DAN DINAMIKA
CONTOH
34

KINEMATIKA DAN DINAMIKA
CONTOH
1. Jumlah link L = 4
2. Jumlah Joint (Penuh) J=4
3. Jumlah ground link G=1
M = 3(4 – 1) – 2x4
M = 1
35

KINEMATIKA DAN DINAMIKA
HUKUM GRASHOF (4 Link)
“Jumlah link terpendek (S) dan terpanjang (L) pada bidang dengan 4 link haruslah lebih kecil atau sama dengan jumlah link yang tersisa (P dan Q)”
L + S ≤ P + Q
36

KINEMATIKA DAN DINAMIKA
TERIMA KASIH
37