Embed Size (px)
Citation preview

L’espace et le groupe modulaire de TeichmüllerAlexandre RAMOS PEON
Juin 2010
Table des matières1 Topologie des surfaces 3
1.1 Homotopie de chemins et groupe fondamental . . . . . . . . . . . . . . . . 31.2 Généralités sur les surfaces . . . . . . . . . . . . . . . . . . . . . . . . . . . 61.3 Courbes fermées simples . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71.4 Classification de surfaces . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81.5 Groupe fondamental de Sg,n . . . . . . . . . . . . . . . . . . . . . . . . . . 9
2 Le groupe modulaire 112.1 Définitions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 112.2 Propriétés des twists de Dehn . . . . . . . . . . . . . . . . . . . . . . . . . 152.3 Exemples importants . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 182.4 Théorème de Dehn-Nielsen-Baer . . . . . . . . . . . . . . . . . . . . . . . . 19
3 Géométrie hyperbolique 213.1 Le plan hyperbolique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 213.2 Surfaces hyperboliques et leurs géodésiques . . . . . . . . . . . . . . . . . . 23
3.2.1 Géodésiques . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
4 L’espace de Teichmüller 254.1 Définition de Teich(Sg) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 254.2 Décomposition topologique en pantalons . . . . . . . . . . . . . . . . . . . 264.3 Classification des pantalons hyperboliques . . . . . . . . . . . . . . . . . . 274.4 Coordonnées de Fenchel-Nielsen . . . . . . . . . . . . . . . . . . . . . . . . 294.5 L’action de Mod(S) sur Teich(S) . . . . . . . . . . . . . . . . . . . . . . . 33
IntroductionCe document, issu du stage de TER encadré par Frédéric Paulin, prétend donner un
aperçu du groupe modulaire de Teichmüller, prouver ou énoncer ses propriétés les plusimportantes, décrire l’espace de Teichmüller et montrer comment ce groupe agit sur cetespace. Le quotient qui en résulte est un objet fondamental en mathématiques, qui para-mètre (entre autres !) les classes d’isométrie de structures hyperboliques sur une surface Sdonnée. L’objectif central se limite à comprendre les objets qui rentrent en jeu dans cetteconstruction.
1

Un coup d’oeil à la table des matières révèle aussitôt l’organisation de ce compte rendu.Les chapitres 1 et 3 sont essentiellement des prérequis et à ce titre se permettent fréquem-ment de renvoyer aux références, tandis que les chapitres pairs, qui portent sur le contenusubstantiel, contiendront plus souvent des démonstrations complètes et d’abondantes illus-trations.
Le premier chapitre s’occupe de rappeller les définitions et notions plus importantessur les surfaces orientables, objet d’étude de ce travail, ainsi que les types de courbesqui les habitent, puis esquisser la démonstration de leur classification et du calcul de leurgroupe fondamental. On introduit de suite le groupe modulaire de Teichmüller, Mod(S), quiconsiste des classes d’isotopie d’homéomorphismes de S préservant l’orientation et fixant∂S. Les “twists de Dehn” sont l’exemple type des éléments de Mod(S), consistant à faire“tourner” une portion de la surface sur elle même, en la “tordant” 1. Après démontrer leurspropriétés les plus élémentaires, on calcule certains groupes modulaires. Dehn a montréque ses twists engendrent Mod(S), ce qu’on ne montrera ici que pour S = T 2, puis onesquisse la démonstration technique du théorème de Denh-Nielsen-Baer, qui relie algèbreet géométrie en affirmant que Mod(S) est un sous-groupe d’automorphismes extérieurs deπ1(S).
Qui dit Teichmüller dit géométrie hyperbolique, et donc le chapitre 3 est une expositionéclair de l’espace hyperbolique avec ses deux modèles les plus communs, les propriétés deses géodésiques, et les surfaces hyperboliques. Outre la définition via isométrie locale, onaura besoin de considérer les relevés d’arcs hyperboliques, d’où la nécessité de rappellerla théorie des revêtements et son lien avec les polygones hyperboliques. On commencele chapitre 4 par la définition de l’espace de Teichmüller, noté Teich(S), qui peut êtredécrit comme l’ensemble de classes d’isomorphisme de structures hyperboliques marquéessur la surface S. On verra précisément quelle est cette relation d’équivalence. L’objectifest de montrer un théorème démontré par Fricke et Klein en 1897, qui affirme que pourla surface fermée Sg de genre g ≥ 2, Teich(Sg) est homéomorphe à R6g−6. La stratégiepour accomplir ceci est de montrer que l’on peut décomposer cette surface topologique en“pantalons” par 3g − 3 courbes géodésiques, que l’espace de Teichmüller d’un pantalonest précisémment paramétré par les trois longueurs de ses composantes de bord, et que lastructure hyperbolique de Sg dépend de 3g−3 paramètres réels additionnels, correspondantà “l’angle” par lequel on tourne les “jambes” du pantalon avant de les recoller entre eux.Ceci reste très peu rigoureux et il est dans notre interêt de formaliser cette palabrerie. Pourfinir, on établit un lien entre Mod(S) et Teich(S) via une action naturelle de “changementde marque”, qui est proprement discontinue (ce que l’on ne montrera pas) ; l’obstruction àqu’elle soit libre dépend exclusivement de la torsion des éléments de Mod(S). Le quotientn’est donc pas une variété ; il décrit les structures complexes (ou hyperboliques) sur S sansmarquage : son étude correspond à un problème classique remontant a Riemann.
1. Le mot “torsion” étant déjà trop fréquent en mathématiques, on doit se résigner à suivre l’usage etutiliser le mot anglais “twist”. Il peut être intéressant de savoir que Max Dehn utilisait le mot Schraubungen,“application de vissage”
2

1 Topologie des surfacesL’idée de cette section est de mettre en place les définitions, les outils algébriques et
les prérequis de topologie de surfaces, sur lesquelles porte le sujet de cet exposé. La réfé-rence concernant les paragraphes 1, 3 et 5 est [Hat]. On admet les notions élémentaires detopologie. S’agissant de notions de base, beaucoup de démonstrations ne sont pas données.
1.1 Homotopie de chemins et groupe fondamentalSoit X un espace topologique. On appelle un chemin dans X une application continue
f : I → X, où I est l’intervalle [0, 1]. Une homotopie de chemins dans X entre deuxchemins γ0 et γ1 est une application f : I × I → X continue telle que f0 = γ0, f1 = γ1, etque pour tout s ∈ I, si fs(t) = f(s, t), alors fs(0) = x0 et fs(1) = x1.Lorsque deux chemins sont reliés de cette façon, on dit qu’ils sont homotopes (à extrémitésfixées).
Il est très facile de voir que la relation “être homotope” est une relation d’équivalence.On a aussi une notion de composition de chemins, qui correspond à la notion intuitive deles mettre “bout à bout” : si f, g : I → X sont tels que f(1) = g(0), on peut définir lechemin composé
(f · g)(t) ={
f(2t) si 0 ≤ t ≤ 1/2g(2t− 1) si 1/2 ≤ t ≤ 1.
De plus, si f0 (resp. g0) est homotope à f1 (resp. g1) via fs (resp. gs), alors fs · gs est unehomotopie entre f0 · g0 et f1 · g1. En particulier, on peut restreindre notre attention à deslacets, c’est-à-dire aux applications telles que f(0) = f(1) ; on appelle f(0) le point basedu lacet.Soit π1(X, x0) l’ensemble de classes d’homotopies [f ] de lacets dans X avec un même pointbase x0. La proposition suivante, qui est élémentaire, justifie que l’on l’appelle le groupefondamental, ou le premier groupe d’homotopie (les groupes d’homotopie supérieurs sontdéfinis de façon similaire, avec [0, 1]n au lieu de [0, 1] comme espace base).
Proposition 1.1. L’ensemble π1(X, x0) est un groupe pour la loi [f ][g] = [f · g].
Le choix du point base n’a en fait qu’une importance sommaire :
Proposition 1.2. Si x0 et x1 appartiennent à la même composante connexe par arcs deX, alors les groupes π1(X, x0) et π1(X, x1) sont isomorphes.
Démonstration. Soit h : I → X une application continue telle que h(0) = x0 et h(1) =x1 ; notons h(t) le chemin inverse : t 7→ h(1− t). L’isomorphisme β : π1(X, x1)→ π1(X, x0)est donné par β([f ]) = [h · f · h]. Si ft est une homotopie entre des lacets d’origine x1,alors h · ft · h est une homotopie entre des lacets d’origine x0, donc β est bien défini.Comme β([f · g]) = [h · f · g · h] = [h · f · h · h · g · h] = β([f ]) · β([g]), l’applicationβ est un homomorphisme. L’application [g] 7→ [h · g · h], notée β, est l’inverse de β carββ([f ]) = β([h · f · h]) = [h · h · f · h · h] = [f ]. �
3

On dit qu’un espace X est simplement connexe si X est connexe par arcs et de plusπ1(X) = 0. La proposition suivante justifie le terme :
Proposition 1.3. Un espace X est simplement connexe si et seulement si pour chaquepaire de points x0, x1 de X, il existe une unique classe d’homotopie de chemins reliant x0à x1.
Démonstration. Soit X simplement connexe. L’existence de chemins est claire, il resteà voir l’unicité. Si f et g relient x0 à x1, et si π1(X) = 0 alors f est homotope à f · g · g,qui est homotopie à g car g · g et f · g sont tous deux homotopes à des chemins constants.Inversement, s’il n’y a qu’une classe d’homotopie entre les lacets d’origine x0, alors ils sonttous homotopes au lacet constant. �
Encore un résultat facile mais important :
Proposition 1.4. Les groupes π1(X×Y, (x0, y0)) et π1(X, x0)×π1(Y, y0) sont isomorphes.
Ceci résulte du fait qu’une application est continue si et seulement si chacune de sescomposantes l’est ; donc se donner un lacet dans X × Y revient à se donner un lacet dansX et un lacet dans Y .
On note S1 = {(x, y) ∈ R2 | x2 + y2 = 1}, qui est le cercle. Le théorème suivant, quiest bien connu, a des conséquences topologiques importantes :
Théorème 1.5. Il existe un isomorphisme de groupes entre Z et π1(S1).
Soit φ : X → Y une application continue telle que φ(x0) = y0. Dans ce cas, on noteraφ : (X, x0) → (Y, y0). Alors φ induit une application φ∗ : π1(X, x0) → π1(Y, y0) par [f ] 7→[φ◦f ]. Cette application induite est bien définie, car une homotopie ft de lacets d’origine x0donne une homotopie φ◦ft de lacets d’origine x1, et donc φ∗[f0] = [φ◦f0] = [φ◦f1] = φ∗[f1].Cette application est de plus un homomorphisme, car φ ◦ (f · g) = (φ ◦ f) · (φ ◦ g), les deuxfonctions ayant même valeur φ◦f(2t) pour 0 ≤ t ≤ 1/2 et φ◦g(2t−1) pour t ≥ 1/2. Commela composition d’applications est associative, on a (φ ◦ ψ)∗ = φ∗ ◦ ψ∗ et id∗ = Id (c’est-à-dire, que l’application id : X → X induit l’identité de groupes Id : π1(X)→ π1(X)). Si deplus φ est un homéomorphisme, alors φ∗ est un isomorphisme de groupes, d’inverse (φ−1)∗.
Dans un sens plus large, une homotopie (distinguer d’homotopie de chemins) est uneapplication continue h : I × X → Y et l’on note hs : X → Y l’application x 7→ h(s, x)pour tout s ∈ I. Une équivalence d’homotopie est une application f : X → Y tellequ’il existe g : Y → X avec f ◦ g et g ◦ f homotopes à l’identité ; on dit dans ce cas que Xet Y ont le même type d’homotopie. Une rétraction de X dans A est une applicationcontinue f : X → X avec r(X) = A et r �A= id. Une rétraction par déformations deX sur A est une homotopie entre l’identité de X et une rétraction r : X → A. Si A ⊂ Xet B ⊂ Y et si une homotopie φt : X → Y vérifie φt(A) ⊂ B pour tout t ∈ I, on dit queφt est une homotopie de paires φt : (X,A)→ (Y,B). Dans le cas où A = x0 et B = y0,on parle d’homotopies prévervant le point base.
4

Proposition 1.6. Si X se rétracte sur A, alors i∗ : π1(A, x0) → π1(X, x0) induite parl’inclusion est injective. Si A est une rétraction par déformations, alors i∗ est un isomor-phisme.
Démonstration. Si r : X → A est une rétraction, alors r ◦ i = id, donc r∗ ◦ i∗ = Id,donc i∗ est injective. Si rt : X → X est une rétraction par déformations sur A, r0 = id etrt �A= idA, r1(X) ⊂ A, donc ∀f : I → X sur x0 lacet, rt ◦ f donne une homotopie entre fest un lacet sur A, donc i∗ est aussi surjective. �
Observons de plus que si φt : (X, x0) → (Y, y0) est une homotopie préservant le pointbase, alors φ0∗ = φ1∗ car φ0∗([f ]) = [φ0 ◦f ] = [φ1 ◦f ] = φ1∗([f ]). Comme dernière propriétédes équivalences d’homotopies, on montre :
Proposition 1.7. Si φ : (X, x0) → (Y, y0) est une équivalence d’homotopies, alors φ∗ :π1(X, x0)→ π1(Y, y0) est un isomorphisme.
Nous aurons besoin d’un lemme :
Lemme 1.8. Soient φs : X → Y une homotopie, x0 ∈ X, et h le chemin s 7→ φs(x0) ;alors on a le diagramme commutatif suivant :
π1(X, x0) φ1∗ //
φ0∗
''PPPPPPPPPPPπ1(Y, φ1(x0))
βh��
π1(Y, φ0(x0))
Démonstration. Soit f un lacet en x0 ; il s’agit de montrer que φ0∗(f) et βh(φ1∗(f)) sonthomotopes en tant que lacets d’origine φ0(x0). Pour tout s ∈ [0, 1], notons hs l’applicationde [0, 1] dans Y définie par t 7→ h(st). Alors la famille de chemins d’origine φ0(x0) donnantl’homotopie est précisement s 7→ hs · (φs ◦ f) · hs, car en s = 0 et s = 1 on a les cheminsφ0∗(f) et βh(φ1∗(f)) respectivement. �
Démonstration (de la proposition). Par hypothèse, il existe une inverse homotopiquepour φ ; soit ψ : Y → X un tel inverse. Considérons
π1(X, x0) φ∗ // π1(Y, φ(x0)) ψ∗ // π1(X,ψ ◦ φ(x0)) φ∗ // π1(Y, φ ◦ ψ ◦ φ(x0))
La composée des deux premières applications est un isomorphisme car ψ◦φ est homotope àl’identité, donc ψ∗◦φ∗ = βh pour un certain h, par le lemme. En particulier φ∗ est injective,car ψ∗ ◦φ∗ est un isomorphisme. En raisonnant sur les deux dernières applications, on voitque ψ∗ est injective. Donc les deux premières applications sont injectives, leur compositionest bijective, donc la première application, qui est φ∗, est aussi surjective. �
5

1.2 Généralités sur les surfacesDans ce qui suit, nous appellerons surface toute varieté topologique de dimension
deux. On rappelle qu’une varieté topologique de dimension n est un espace topo-logique X séparé, à base d’ouverts dénombrable, et localement homéomorphe à Rn. Ladéfinition de structure differentiable nécessite de la notion de carte et d’atlas : soit Uα unefamille d’ouverts localement homéomorphes à Rn couvrant X ; on appelle cartes les ho-méomorphismes locaux fα : Uα → Vα et atlas l’ensemble de ces cartes. Les fonctions detransition fα ◦ f−1
β sont continues dans le cas d’une variété topologique. On dit que deuxatlas sont équivalents si la réunion en est un (i.e. si les fα ◦ g−1
β sont continues) ; chaqueatlas appartient à une unique classe d’équivalence, représentée par un atlas maximal. Unevariété topologique munie d’un atlas maximal avec fonctions de transitions différentiables(ou de classe C∞) sera appelée variété différentiable (ou C∞).
On peut étendre cette définition pour inclure les variétés à bord : on permetra queles cartes aient pour image un ouvert de Rn−1×R+. Dans ce cas, le bord forme une variétéde dimension n− 1 que l’on note ∂X.
On se propose maintenant d’énoncer des résultats classiques permettant “d’améliorer”le type de relation entre deux fonctions (homotopie à isotopie), entre deux espaces (homéo-morphisme à difféomorphsime), etc. On dit que deux homéomorphismes f, g : X → Y sontisotopes s’ils sont homotopes par une homotopie qui est un homéomorphisme à chaqueinstant : pour tout s ∈ I, Hs : X → Y est un homéomorphisme. Un résultat de Munkres,démontré dans sa thèse [Mu1], nous sera très utile :
Théorème 1.9. Deux surfaces différentiables homéomorphes sont difféomorphes.
La proposition suivante nous permetra de définir le concept d’orientabilité.
Proposition 1.10. Étant donné une surface X, il existe une structure différentiable declasse C∞ sur X, unique à homéomorphisme près.
L’unicité est assurée par le théorème précédent, et l’existence par le théorème 2.2 de[Rey]. On dit alors qu’une surface topologique X est orientable si elle l’est en tant quesurface différentiable. Ceci veut dire que dans son atlas maximal, le jacobien des change-ments de cartes est strictement positif. On observe de plus qu’une orientation de X induitune orientation de ∂X. Dans cet exposé, toutes les surfaces seront considerées orientables,même si ce n’est pas toujours nécessaire ou si ce n’est pas explicitement indiqué.
Pour une démonstration du théorème suivant, utile au chapitre 2, on pourra consulterle théorème 6.3 de [Eps] :
Théorème 1.11. Soient S une surface connexe orientable compacte et f, g des homéo-morphismes homotopes de S. Si f et g préservent l’orientation, alors f et g sont isotopes.En fait, si S n’est pas le disque fermé D ou l’anneau A (surface compacte homéomorpheà un disque fermé D privé d’un disque ouvert strictement contenu dans D), alors f et gsont isotopes même si l’on suppose qu’ils ne préservent pas l’orientation.
6

Finalement, prenons note du théorème suivant, qui a été démontré par Munkres dans[Mu2] :
Théorème 1.12. Tout homéomorphisme d’une surface connexe S est isotope à un difféo-morphisme.
1.3 Courbes fermées simplesSoit S une surface orientée. On définit une courbe fermée simple comme l’image
d’une application continue injective f : S1 → S qui est injective (de façon équivalente,f : I → S, avec f(0) = f(1) et f injective dans ]0, 1[ ). On confondra parfois la courbeavec la fonction qui la définit. Deux courbes fermées simples sont isotopes s’il existe unehomotopie H entre elles telle que ∀s ∈ I, Hs : S1 → S soit une courbe fermée simple.On souligne que ce concept ne dépend pas de “points bases”. Si α et β sont deux courbesfermées simples, on définit le nombre d’intersection géometrique de α et β, notéi(α, β), comme le minimum des points d’intersection α′ ∩ β′, où α′ (resp. β′) est homotopeà α (resp. β). Dans le cas où α et β sont telles que α∩β est minimal, on dit qu’elles sont enposition minimale. On note alors aussi i(a, b) ce nombre. Comme la surface est supposéeorientée, deux courbes α et β se coupant transversalement en un point x définissent uneorientation de S (cette notion dépend évidemment de l’ordre de la paire α, β). On peut doncdéfinir î (a, b), le nombre d’intersection algébrique de deux courbes fermées simplesorientées, comme la somme des indices des points d’intersection de a et b, où l’indice est+1 ou −1 selon que l’orientation de l’intersection coïncide ou non avec l’orientation de S.Le critère suivant, démontré au théorème 1.3 de [F-M], est très utile pour déterminer sideux courbes fermées simples données sont en position minimale :
Proposition 1.13 (Critère du “bigone”). Deux courbes fermées simples et transverses sonten position minimale si et seulement s’il n’existe pas de disque bordé par deux arcs de cescourbes.
On dit qu’un tel disque est un bigone. Une application immédiate de ce critère est quedeux courbes s’interesectant exactement en un point sont en position minimale. Voici uneautre application :
Proposition 1.14. Deux courbes fermées simples sont homotopes si et seulement si ellessont isotopes.
Démonstration. Soient α et β homotopes. Comme i(α, β) = 0, si elles ne sont pasdisjointes, elles ne sont pas en position minimale, et on a alors un bigone, qui suggèreune isotopie réduisant strictement le nombre d’intersection. On peut donc supposer queα et β sont disjointes. Mais α et β bordent des sous-surfaces. Au moins une de ces sous-surfaces doit être un anneau (sinon, elles ne seraient pas homotopes). Cet anneau suggèreà nouveau l’isotopie entre les deux courbes. �
7

Corollaire 1.15. Si α et β sont isotopes comme courbes fermées simples via F : S1× I →S, alors il existe une isotopie H : S × I → S de la surface telle que H(x, 0) = x pour toutx ∈ S et H(F (s, 0), t) = F (s, t) .
Ceci veut dire que l’on peut étendre l’isotopie à toute la surface.La démonstration formelle nécessite de notions qu’il ne convient pas de définir ici, maisl’idée est la suivante : on peut supposer (comme dans la démonstration de 1.14) que α etβ sont disjointes et que les courbes bordent une sous-surface homéomorphe à un anneau.Il est possible de trouver un champ de vecteurs lisse à support dans un voisinage régulierde l’anneau, et on obtient H en l’étendant à S puis en l’intégrant. Voir par exemple [Hir],théorème 1.3 du chapitre 8.
Il est aussi possible de considérer des arcs dans une surface S à bord. Un arc dansS est une application α : I → S telle que α−1(∂S) = {0, 1}, et on dit qu’il est simplesi l’application est injective sur ]0, 1[. La classe d’homotopie se définit naturellement enne permettant que des arcs dans à chaque instant de l’homotopie, et on peut aussi parlerd’homotopie d’arcs relativement au bord de S (si les extrémités restent fixes sur ∂S). Laproposition 1.14 et son corolaire sont aussi valables pour les arcs,
1.4 Classification de surfacesLe théorème de classification des surfaces nous sera extrêmement utile dans ce qui suit.
Une démonstration complète peut se trouver dans le premier chapitre de [Rey]. On donneici les définitions pertinentes et une idée très sommaire de la démonstration. Celle-ci utilisele concept de “triangulations”, qui est intuitivement clair, mais que nous précisons de suite.Soit X une surface, notons T le triangle de R2 de sommets 0, 1, eiπ/3 ; un triangle est uneinjection continue T ↪→ X, et on appelle encore son image triangle, avec trois arêtes ettrois sommets (naturellement, les images des arêtes et sommets de T ). Une triangulationde X est la donnée d’un ensemble de triangles fi : T ↪→ X dont les images recouvrent Xet tels que pour tout p ∈ X on ait
1. si p n’est pas sur une arête, il appartient à un unique triangle fi(T ), qui est alors unvoisinage de p ;
2. si p est sur une arête a mais non sur un sommet, il appartient exactement à deuxtriangles ti = fi(T ) et tj = fj(T ), tels que ti ∩ tj = a et ti ∪ tj est un voisinage de p ;
3. si p est un sommet, il appartient exactement à un nombre fini de triangles t1, . . . , tk ;ceux-ci ont p pour sommet, leur réunion est un voisinage de p, et ti et ti+1 ontexactement une arête commune.
Le théorème suivant, que nous admettons (voir par exemple théorème 2.1 de [Rey]), estfondamental :
Théorème 1.16. Toute surface topologique connexe admet une triangulation. Si X estcompacte, l’ensemble des triangles est fini.
8

Soient X, Y des surfaces disjointes, D1 ⊂ X,D2 ⊂ Y , où chaque Di est un disquefermé plongé, à bord homéomorphe à un cercle. Soient X ′ = X − D1, Y
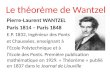
′ = Y − D2, etf : ∂D1 → ∂D2 un homéomorphisme. Alors l’espace topologique noté X#Y et appelésomme connexe de X et Y , est l’espace topologique quotient (X ′ ⊔Y ′)/ ∼, où x ∼ y sif(x) = y. On peut maintenant énoncer le théorème principal :Théorème 1.17. Soit X une surface topologique orientable, compacte, connexe, et à bord(éventuellement vide). Alors X est homéomorphe à la somme connexe de g ≥ 0 tores,privée des intérieurs de n ≥ 0 disques fermés disjoints. Les valeurs de g et de n sontuniquement déterminées.
On note Sg,n une telle surface, et pour simplifier, Sg la surface Sg,0. On appelle g legenre de S, et n le nombre de composantes connexes de bord. Un dessin bien connu justifiele rapprochement de g avec le nombre “d’anses” ou de “trous”.L’idée de la démonstration est d’utiliser une triangulation, et montrer que toute surfaceorientable compacte est homéomorphe soit à la sphère S2, soit à un polygone à 4g côtésidentifiés 2 à 2 de la manière suivante : on identifie un côté c avec le côté c−1 pris dansle sens opposé : la figure 1 explique cette notation. La surface est donc homéomorphe àl’espace quotient de ce polygone par la relation de recollement des arêtes. Tous les sommetss’identifient à un seul point. Les côtés ai, bi forment des cycles sur la surface X. Si on voitX comme un tore à trous, on peut regrouper ces cycles par 2 : pour chaque trou, un ai“tourne autour” et un bi “passe à travers”.
a2
b1
a1
Figure 1 – Polygone à 4g cotés identifiés.
Finalement, rappelons que la characteristique d’Euler d’une surface Sg,n est
χ(Sg,n) = 2− 2g − n.
1.5 Groupe fondamental de Sg,nPour décrire le groupe fondamental d’une surface, on a besoin d’introduire certaines
notions algébriques. Soit S un ensemble. Le groupe libre engendré par S, noté L(S),
9

est l’ensemble des mots de longueur arbitraire finie sε11 · · · sεkk , k ≥ 0, εi ∈ {1,−1}, si ∈ S,où l’on suppose que les mots sont réduits (i.e., si si = si+1, alors εi = εi+1). On définit uneloi de composition par la concaténation avec réduction, d’inverse s−εkk · · · s−ε11 , et d’élémentneutre le “mot vide” (k = 0). Ceci est en effet un groupe (voir par exemple [Hat]) :
Proposition 1.18. L’ensemble L(S) muni de cette loi de composition est un groupe.
On observe que ce groupe est fortement non-abélien. Si S est de cardinal fini n, L(S)est appelé groupe libre à n générateurs. On définit maintenant le produit libre de deuxgroupes A et B : l’ensemble sous-jacent est celui des mots finis formés par des “lettres” quisont des éléments alternativement dansA etB, et l’opération de groupe est la concaténationavec réduction comme on l’a définie plus haut ; on note A ? B le produit libre de A et B.Par exemple, le groupe libre à n générateurs est le produit libre de n copies de Z, mais onobserve qu’en général le produit libre de groupes n’est pas un groupe libre.On aura besoin de ce théorème classique, dont la démonstration peut se trouver dans [Hat](par exemple) :
Théorème 1.19 (Théorème de van Kampen, version simplifiée). Soient X une surface etdes ouverts A et B couvrant X tels que A,B et A ∩ B soient connexes par arcs. Soientx ∈ A ∩B, i : A ↪→ X, j : B ↪→ X. Alors on a un isomorphisme de grooupe
π1(X, x) = (π1(A, x) ? π1(B, x))/N
où N est le sous-groupe distingué engendré par les éléments du type i∗[γ] · j−1∗ [γ], où γ est
un lacet d’origine x dans A ∩B.
On peut maintenant énoncer et démontrer le théorème principal de cette section.
Théorème 1.20. Soit x ∈ Sg,n. Alors on a un isomorphisme de groupes
π1(Sg,n, x) ∼= 〈a1, b1, . . . , ag, bg, c1, . . . , cn | [a1, b1] · · · [ag, bg]c1 · · · cn〉.
Observons que si n ≥ 1, on tire de la relation ci-dessus que
c−1n =
g∏i=1
[ai, bi]n−1∏i=1
ci,
et donc π1(Sg,n, x) = L(2g + n− 1).
Démonstration. Pour simplifier, on note X = Sg,n. D’après le théorème de classificationdes surfaces, X est homéomorphe au quotient d’un polygone P à 4g cotés identifiés, quel’on prive des intérieurs de n disques fermés disjoints ; on note ci le bord de ces disques etai, bi les bords de P , comme sur la figure 2.
On a alors que le bord de la surface est ∂X = ⋃{ci}. Soit Q ∈ P , A = X − ∂P ,B = X − {Q} ; alors X = A ∪ B. Par van Kampen, comme π1(A) = {0} et B se rétractepar déformations sur ∂X, on a π1(X) = π1(∂X)/N , où N est engendré par un lacet γ dansA ∩B. Voir la figure 2, sur laquelle on représente γ avec des pointillés plus serrés.
10

Figure 2 – Lacets dans Sg,n.
On voit que ∂X a le type d’homotopie d’un bouquet de 2g cercles et de n “segments”.Il est facile de voir que π1(∂X) est le groupe libre à 2g + n générateurs : on décomposele bouquet B en prenant W1 = B − {x1, . . . , x2g+n−1} où chaque xi ∈ Ci (un cercle) avecxi 6= x, W2 = B−{x2g+n}, qui se rétractent sur C2g+n et C1 ∪ . . .∪C2g+n1 respectivement,et leur intersection à le type d’homotopie d’un point x. Donc π1(B) = π1(C2g+n) ? π1(C1 ∪. . . ∪ C2g+n1) ∼= Z ? · · · ? Z par une récurrence immédiate. Le générateur de π1(A ∩ B), γ,est bien a1b1a
−11 b−1
1 · · · agbga−1g b−1
g · c1 · · · cn, qui est bien ce que l’on voulait. �
2 Le groupe modulaireLe but de cette section est d’introduire le groupe modulaire de Teichmüller d’une surface
S (toujours supposée compacte à bord éventuellement vide, connexe et orientable), etd’étudier ses propriétés. Les références principales sont [F-M] et [Iva].
2.1 DéfinitionsSoit S une surface, Homeo+(S, ∂S) le groupe d’homéomorphismes préservant l’orien-
tation et qui valent l’identité sur ∂S, et muni de la topologie de la convergence sur descompacts, qui es la même que la compacte-ouverte. Soit Homeo0(S, ∂S) la composanteconnexe de l’identité dans Homeo+(S, ∂S), c’est-à-dire le sous-groupe distingué des ho-méomorphismes de S qui sont isotopes à l’identité par une isotopie fixant le bord de Spoint par point. On définit le groupe modulaire de Teichmüller par
Mod(S) = Homeo+(S, ∂S)/Homeo0(S, ∂S)
11

Il est possible de faire des variations de cette définition, comme considérer des homéomor-phismes qui ne préservent pas l’orientation, ou qui ne fixent pas ∂S, etc.
Un premier exemple informel d’élément de Mod(S) est la classe de l’homéomorphismeφ d’ordre g de Sg, consistant à faire “tourner” la surface Sg (que l’on représente en formed’étoile avec les trous sur les bras) par un angle de 2π/g. En considérant une courbe ferméesimple non triviale autour d’un seul “trou”, on voit intuitivement que cet élément n’est pastrivial dans Mod(S).
Nous allons considérer une classe importante d’homéomorphismes d’une surface. Pourcela, soit A = S1 × [0, 1] un anneau, où les éléments de S1 sont des réels modulo 2π,et T : A → A défini par T (θ, t) = (θ + 2πt, t). C’est un homéomorphisme préservantl’orientation fixant ∂A point à point : voir la figure 3. Soit α une courbe fermée simple sur
Figure 3 – T : A→ A, le paradigme du twist de Dehn.
une S, N un voisinage fermé homéomorphe à A (on appelle un tel fermé un voisinageregulier), et φ : A → S un plongement préservant l’orientation qui a N pour image. Letwist de Dehn associé à α, noté Tα, est l’homéomorphisme Tα : S → S qui consiste à“appliquer” T à N :
Tα(x) ={
x si x /∈ Nφ ◦ T ◦ φ−1(x) si x ∈ N.
On peut aussi penser à Tα de la façon suivante : couper S sur α, tourner un voisinaged’une des composantes connexes du bord ainsi formé par 2π vers la gauche, puis recoller.On observe en particulier que cette construction ne dépend pas de l’orientation de α,puisque “tourner à gauche” dépend uniquement de l’orientation de S et pas de celle de α.De plus, la classe d’isotopie de Tα ne dépend pas du choix de N , ni de la courbe α dans saclasse d’isotopie. Si a est la classe de α, nous noterons Ta ∈ Mod(S) l’élément ainsi défini,qui s’appelle le twist de Dehn associé à a.
Avant d’aborder les propriétés importantes de ces twists de Dehn, on se rassure enobservant que les Ta sont en effet intéressants :
Proposition 2.1. Soit a la classe d’isotopie d’une courbe fermée simple non homotope àun point. Alors Ta est un élément non-trivial de Mod(S).
Démonstration. La preuve est “par dessin”, en deux cas. Soit a = [α]. Soit α est telleque S − {α} n’est plus connexe, et dans ce cas on dit que α sépare S, soit S − {α} est
12

connexe, et alors α ne sépare pas S. Si α et β ne séparent pas S, alors il existe unhoméomorphisme de S envoyant α sur β : en effet, si on coupe S par α, on obtient unesurface Sα avec deux composantes de bord associées à α ; cette surface est homéomorphe àSβ par le théorème de classification des surfaces, car elles ont toutes deux la même quantitéde composantes de bord et le même genre ; de plus, quitte à le modifier sur un voisinagedu bord, cet homéomorphisme se recolle en un homéomorphisme h de S tel que h(α) = β.Dans le cas où α et β séparent S et ont des compléments homéomorphes, alors il existeun homéomorphisme h : S → S tel que h(α) = β, et donc on dit qu’elles ont le mêmetype topologique. Cette discussion justifie que l’on puisse se ramener à notre dessinfavori (figure 4) pour faire la démonstration. Dans le premier cas, celui où α ne sépare pas,on choisit β avec i(α, β) = 1. En notant b la classe d’isotopie de β, on peut choisir unreprésentant de Ta(b) coupant β transversalement une seule fois ; par le critère du bigone,i(b, Ta(b)) = 1 et on en conclut que Ta(b) 6= b (car en général i(b, b) = 0).
Figure 4 – Cas où a ne sépare pas S.
Dans l’autre cas, on choisit les courbes fermées simples α et β comme sur la figure 5.Si a est la classe d’isotopie de α, il existe donc une classe b avec i(a, b) = 2, et on peutconsidérer la classe Ta(b). On a 4 intersections entre Tα(β) et β ; on veut appliquer le critèredu bigone pour montrer que i(Tα(β), β) = 4, et donc Ta(b) 6= b. Pour cela, on voit que βpartitionne Tα(β) en 4 arcs et vice-versa ; sur la même figure, on voit que pour chaque arcde Tα(β), il y a un arc de β avec les mêmes bouts ; ces 4 paires pourraient “potentiellement”former 4 bigones, mais en fait chaque courbe ne sépare pas, et donc ne peut pas border unbigone. �
Figure 5 – Cas où a sépare S.
13

La généralisation suivante nous sera utile :
Proposition 2.2. Soient a et b deux classes de courbes fermées simples non homotopes àun point. Alors
i(T ka (b), b) = |k|i(a, b)2
En particulier, les twists de Dehn sont d’ordre infini.
Démonstration. On prend α et β des représentants en position minimale. On forme lacourbe β′ dans la classe de Ta(b), en décalant un peu β et la modifiant dans un voisinagede α, comme dans la figure 6, qui représente la situation pour k = 1 et i(a, b) = 3. On
Figure 6 – Démonstration de la proposition 2.2.
compte le nombre de fois que β et β′ se rencontrent : pour chaque croisement entre α etβ, β′ croise β “i(a, b) fois”, et comme il y a i(a, b) telles rencontres, on a au total i(a, b)2
points de rencontre entre β et β′. Pour k ≥ 1, on refait le passage k fois, et ce chiffredevient |k|i(a, b)2. Il suffit maintenant de montrer que β et β′ sont en position minimale.On coupe β et β′ aux points de β ∩ β′, et on note {βi} et {β′i} les arcs fermés en résultant.Les bigones potentiels, c’est-à-dire les courbes fermées simples que l’on peut former avecun arc βi et un arc β′i, sont de deux types : soit les deux points de rencontre ont la mêmeorientation, comme pour la courbe γ1 du coté gauche de la figure 7, ou pas, comme pourγ2. Dans le premier cas, on remarque que l’on n’est pas en présence d’un bigone, car dansun “vrai” bigone les orientations aux intersections sont opposées ; dans le deuxième cas, siγ2 formait un bigone, alors α et β aussi, contrairement à ce que l’on a supposé. Pour ladeuxième partie de la proposition, il reste juste à observer qu’étant donnée α, il existe unecourbe fermée simple β telle que i(α, β) ≥ 0. �
14

Figure 7 – Position possible entre β et β′.
2.2 Propriétés des twists de DehnLes propositions élémentaires qui suivent nous permettent de mieux comprendre le
comportement des twists de Dehn et du groupe modulaire. On introduit une notation :l’ensemble des classes d’isotopie de courbes fermées simples non isotopes à une courbeconstante s’écrira C (0)(S). Dans ce qui suit, a et b sont des éléments de C (0)(S).
Proposition 2.3. Nous avons Ta = Tb si et seulement si a = b.
Démonstration. On a déjà vérifié que les twists de Dehn sont bien définis modulo isotopie,ce qui prouve une direction. Supposons que Ta = Tb mais que a 6= b ; on définit une classede courbes fermées simples selon deux cas. Si i(a, b) 6= 0, prendre c = a. Sinon, on peutvérifier trivialement (par cas, qui varient selon les propriétés de séparation de a et b) qu’ilexiste un c tel que i(a, c) = 0 mais i(b, c) 6= 0. Alors la proposition 2.2 implique que
i(Ta(c), c) = i(a, c)2 = 0 6= i(b, c)2 = i(Tb(c), c)
et donc Ta(c) 6= Tb(c). �
Proposition 2.4. Pour f ∈ Mod(S), on aa) Tf(a) = f ◦ Ta ◦ f−1 ;b) f commute avec Ta si et seulement si f(a) = a.
Démonstration. La démonstration de a) est immédiate : Tf(a) ne dépend pas du plon-gement φ : S1 × [0, 1] → S utilisé pour le construire, et f ◦ φ est un plongement pour lacourbe fermée simple f(a). Pour b), les équivalences
fTa = Taf ⇔ fTaf−1 = Ta ⇔ Tf(a) = Ta ⇔ f(a) = a
établissent le résultat. �
En outre, on sait qu’étant donnés a et b qui ne séparent pas, il existe h ∈ Mod(S)avec h(a) = b. Donc dans ce cas Ta est conjugué à Tb dans Mod(S). En fait ceci peutêtre généralisé à des twists associés à des courbes ayant le même type topologique (voirdémonstration de 2.1).
15

Proposition 2.5. On a i(a, b) = 0⇔ Ta(b) = b⇔ TaTb = TbTa.
Démonstration. La deuxième relation est la proposition 2.4 b). Pour la première, l’im-plication ⇒ est évidente. Si Ta(b) = b, alors i(Ta(b), b) = 0 = i(a, b)2, donc i(a, b) = 0.�
Proposition 2.6. Si i(a, b) = 1, alors TaTbTa = TbTaTb.
Démonstration. Par la proposition 2.4 a), c’est équivalent à dire que TTaTb(a) = Tb, etpar 2.3, que TaTb(a) = b. Voir la figure 8. �
Figure 8 – Démonstration de la proposition 2.6.
On vise maintenant le résultat suivant :
Théorème 2.7. Soient a, b ∈ C (0)(S). Si i(a, b) ≥ 2, le groupe engendré par Ta et Tb estisomorphe à L(2), le groupe libre de rang 2.
Pour ceci, on aura besoin de la version qui suit du “lemme du ping-pong” :
Lemme 2.8. Soient G un groupe agissant sur un ensemble X, n ≥ 2, et g1, . . . , gn ∈ G.On suppose qu’il existe des parties non vides X1, . . . , Xn de X telles que gki (Xj) ⊂ Xi pourtout k 6= 0 et tout i 6= j. Alors le groupe engendré par les gi est libre sur {g1, . . . , gn}.
Démonstration (du lemme). On doit montrer qu’un mot réduit non trivial en les gi n’estpas trivial dans G. Soit
w = ge1i1 · · · g
ekik, ei ∈ Z,
que l’on écrit sous forme réduite. Supposons d’abord n ≥ 3 ; soit j /∈ {i1, ik}, et x ∈ Xj.Alors w(x) ∈ Xi1 et donc w(x) 6= x, ce qui montre que w n’est pas trivial dans G. Dansle cas n = 2, on a deux possibilités : soit i1 = ik, et on pose x ∈ Xj où j 6= i1 et le mêmeraisonnement est valable, soit i1 6= ik et on conjugue le mot w par la lettre gi1 ; on trouvealors
gi1wg−1i1 = gi1g
e1i1 · · · g
ekikg−1i1 ;
et en choisissant x ∈ Xik et appliquant le même raisonnement, on trouve que gi1wg−1i1 n’est
pas trivial, donc w non plus. �
16

Nous avons besoin d’un autre lemme : la version suivante d’un résultat démontré dans[Thu] suffira :
Lemme 2.9. Soient a, b, c ∈ C (0)(S). Alors on a
i(c, b) ≥ |k|i(c, a)i(a, b)− i(T ka (c), b).
Démonstration (du lemme). La preuve est similaire à celle de la proposition 2.2. Oncommence par prendre des représentants en position minimale. On note Γ′ la courbe Tα(γ)décallée, qui traverse une seule fois chaque intervalle de Tα(γ)∩ γ. On vérifie en comptantque le cardinal de c ∩ Γ′ est bien i(c, Ta(c)). On observe que c ∩ Γ′ est l’image d’uneapplication continue de i(c, a) exemplaires de S1. On a donc l’inégalité
|b ∩ (c ∪ Γ′)| ≥ i(c, a)i(a, b)|k|
On peut aussi voir ceci sur la figure 6 : à chaque fois que l’on traverse la courbe a (α surla figure), on traverse i(c, a) fois soit la courbe c (β sur la figure), soit la courbe Γ′ (β′ surla figure). Si b ne passe pas par les points d’intersection de c et de Γ′, on a que le nombrede gauche se décompose en somme. On peut toujours s’arranger pour que
i(Γ′, b) = |Γ′ ∩ b| et i(c, b) = |c ∩ b|
ce qui termine la démonstration. �
Avec tout ceci en main, on peut donner une démonstration du théorème 2.7 :
Démonstration. Soient n ≥ 2, G le groupe engendré par g1 = Ta, g2 = Tb, etX l’ensembleC (0)(S). Le groupe G agit naturellement sur X. On pose
X1 = {c ∈ X | i(c, b) > i(c, a), }
X2 = {c ∈ X | i(c, b) < i(c, a).}Ces ensembles sont non-vides, car a ∈ X1 et b ∈ X2. Montrons que T ka (X2) ⊂ X1 pourk 6= 0. Soit c ∈ X2. Alors par le lemme 2.9, on a
i(T ka (c), b) ≥ |k|i(c, a)i(a, b)−i(c, b) > |k|i(c, a)i(a, b)−i(c, a) = |k|i(c, a)(i(a, b)−1) ≥ i(c, a),
la dernière inégalité ayant lieu car i(a, b) ≥ 2 et |k| ≥ 1. Mais on a aussi
i(c, a) = i(T ka (c), T ka (a)) = i(T ka (c), a)⇒ i(T ka (c), b) > i(T ka (c), a),
ce qui veut dire que T ka (c) ∈ X1. Par un argument symétrique, on a T kb (X1) ⊂ X2. Uneapplication du “lemme du ping-pong” termine la démonstration du théorème 2.7. �
On a donc démontré dans ce paragraphe que si a 6= b et i(a, b) = 0, alors TaTb = TbTa,et donc 〈Ta, Tb〉 ∼= Z2 ; si i(a, b) = 1, alors on a la relation TaTbTa = TbTaTb, et si i(a, b) ≥ 2,il n’y a pas de relations et donc 〈Ta, Tb〉 ∼= L(2).
17

2.3 Exemples importantsOn se propose maintenant de montrer que Mod(T 2) est engendré par des twists de
Dehn, et on procède par étapes. Nous allons d’abord calculer explicitement le groupeMod(S) pour le disque, l’anneau, et finalement le tore. On commence par le disque ; cerésultat s’appelle le lemme d’Alexander :
Proposition 2.10. Le groupe Mod(D2) est trivial.
Démonstration. Soit φ un homéomorphisme de D2 qui vaut l’identité sur ∂D2. On doitconstruire une isotopie de φ à l’identité qui à chaque étape soit l’identité sur le bord dudisque. On pose
F (x, t) :={
(1− t)φ( x1−t) 0 ≤ |x| ≤ 1− t
x 1− t ≤ |x| ≤ 1.L’application F vérifie bien les propriétés voulues. �
L’importance de ce lemme réside dans son utilité pour prouver que deux homéomor-phismes sont égaux dans Mod(S) pour un S plus compliqué.
Proposition 2.11. Soit A est l’anneau fermé S1 × [0, 1]. Alors Mod(A) est isomorphe àZ.
Démonstration. Nous allons donner l’isomorphisme explicitement. Soit δ un arc simple —un chemin orienté— qui relie les deux composantes connexes du bord. Pour f ∈ Mod(S),on choisit φ ∈ Homeo+(A) tel que [φ] = f . Le chemin composé δ · φ(δ) représente unélément de π1(A, p) ∼= Z (cet isomorphisme dépend du choix de l’orientation de A), oùp est le point de départ de δ. L’application f 7→ [δ · φ(δ)] est bien définie, et c’est unhomomorphisme surjectif Mod(A) → π1(A, p), car si a est le cercle S1 × {1/2}, alors T naest n. Pour l’injectivité, supposons que f s’envoie sur 0 : il existe alors une homotopie deφ(δ) sur δ, donc une isotopie (section reftop=dif.courbes), qui peut être étendue en uneisotopie de A fixant ∂A (par le corollaire à 1.14). Donc, à isotopie près, φ est l’identité sur∂A∪ δ. Comme son complément est un disque, f est aussi un élément de Mod(D2), qui estforcément trivial. Donc f est trivial dans Mod(A), ce qui prouve l’injectivité. �
Proposition 2.12. Le morphisme σ : Mod(T 2)→ SL(2,Z), donné par l’action sur π1(T 2),est un isomorphisme.
Démonstration. Soit f ∈ Mod(T 2). On note (1, 0) et (0, 1) les générateurs de π1(T 2),qui correspondent à la longitude et au méridien. Si φ est un représentant de f , alorsφ(1, 0) = (p, q), φ(0, 1) = (r, s) pour certains p, q, r, s ∈ Z, et on définit σ par
σ(f) =(p rq s
).
On commence par voir que ceci est bien défini : des homéomorphismes isotopes induisent lamême action sur π1(T 2). Il faut voir que l’on tombe bien dans SL(2,Z). Ceci sera clair une
18

fois que l’on prouvera que det(σ(f)) =î((p, q), (r, s)), où î est le nombre d’intersection algé-brique, car un homéomorphisme préservant l’orientation préserve î par définition. D’abord,observons que pour (p, q) = (1, 0), det(σ(f)) = s, et évidemment î((1, 0), (r, s)) = s caron compte le nombre de fois que l’on croise (1, 0). Pour (p, q) arbitraire, on considèreM ∈ SL(2,Z) qui envoie (p, q) sur (1, 0), matrice qui induit un homéomorphisme pré-servant l’orientation de T 2, donc qui préserve le déterminant (T 2 = R2/Z2). On a doncbien que σ est bien défini. Pour voir la surjectivité, on prend M ∈ SL(2,Z), qui induitun φM ∈ Homeo(R2) laissant Z2 invariant, donc induit bien par passage au quotient unhoméomorphisme de T 2. On a clairement que σ(φM) = M , en considérant l’action de φMsur les générateurs de π1(T 2) (projections de T 2 sur les axes de R2). Pour l’injectivité, sup-
posons σ(f) =(
1 00 1
). Soit Φ un représentant de f . Si α et β sont des courbes fermées
simples associées à (1, 0) et (0, 1) de π1(T 2), alors α et Φ(α) sont homotopes, ainsi que β etΦ(β). Par 1.14, on a en fait que α et Φ(α) sont isotopes par une isotopie qui peut s’étendreà T 2 : on peut donc supposer, à isotopie près, que Φ(α) = α. On peut de plus considérerΦ comme un représentant d’un f ′ ∈ Mod(A), où A est l’anneau obtenu en coupant etretirant α de T 2. Alors β et Φ(β) sont des arcs de cet anneau qui sont homotopes, et doncf ′ est l’identité dans Mod(A), par la discution précédente de Mod(A) : ρ(f ′) = 0, où ρ estl’action f ′ 7→ β · Φ(β). On en conclut donc que f est l’identité dans Mod(T 2). �
Max Dehn a démontré un théorème plus général : pour toute surface S, Mod(S) estengendré par une quantité finie de twists de Dehn le long de courbes fermées simples quine séparent pas. Malheureusement, nous ne sommes pas en mesure ici de donner cettedémonstration (voir[F-M] par exemple), mais le travail précédent permet de démontrer uncas particulier du théorème de Dehn :
Théorème 2.13. Mod(T 2) est engendré par deux twists de Dehn.
Démonstration. Mod(T 2) ∼= SL(2,Z), et cet isomorphisme de groupes dépend du choixde l’isomorphisme π1(T 2)→ Z2 ; si cet isomorphisme envoie les éléments représentés par lalongitude et le méridien dans la base canonique de Z2, alors les twists de Dehn le long de
la longitude ou du méridien correspondent à des matrices(
1 10 1
)et(
1 0−1 1
). D’autre
part, il est bien connu (voir par exemple 1.2.4 de [Ran]) que les matrices T =(
1 10 1
)et
S =(
0 −11 0
)engendrent SL(2,Z). Comme on a que
(0 −11 0
)= T−1 ·
(1 0−1 1
)· T ,
on en conclut que nos matrices engendrent SL(2,Z), ce qui permet de conclure. �
2.4 Théorème de Dehn-Nielsen-BaerL’objectif de ce dernier paragraphe est d’énoncer et de donner l’idée de la démonstration
du théorème de Dehn-Nielsen-Baer, qui affirme que Mod(S) est un sous-groupe d’indice 2du groupe des automorphismes extérieurs du groupe fondamental de S. La démonstration
19

nécessitant de nombreux résultats de topologie de surfaces, nous nous contenterons d’uneesquisse, en citant les théorèmes nécessaires pour une démonstration complète.
On rappelle que pour un groupe G, si on note Aut(G) son groupe des automorphismeset Int(G) celui de ses automorphismes interieurs, i.e. ceux qui sont des conjugaisons pardes éléments de G, alors on peut définir le groupe des automorphismes extérieurs deG comme le quotient Out(G) =Aut(G)/Int(G). On note Mod±(S) le groupe des classesd’isotopie d’homéomorphismes de S, préservant ou non l’orientation. Alors Mod(S) est unsous-groupe d’indice 2 de Mod±(S). Le théorème de Dehn-Nielsen-Baer affirme que pourg ≥ 1, qu’il y a un isomorphisme entre Mod±(S) et Out(π1(S)). On décrit l’application :pour f ∈ Homeo(S) fixant un p ∈ S donné, il existe un automorphisme induit f∗ surπ1(S, p). Si f est isotope à f ′ via des isotopies fixant p à chaque instant, alors f∗ = f ′∗.Réciproquement, si f et f ′ sont isotopes via una isotopie H(x, t) qui ne fixe pas p à toutmoment, alors f∗ et f ′∗ diffèrent par une conjugaison de la classe d’un lacet γ(t) = H(p, t).Ceci implique qu’étant donnée une classe φ = [f ], on ne peut pas associer un uniquef∗ ∈ Aut(π1(Sg, p)), mais plutôt un automorphisme extérieur φ∗. On peut donc considérerune application
Mod±(Sg)→ Out(π1(Sg, p))
consistant à envoyer φ sur φ∗. Le théorème de Dehn-Nielsen-Baer s’énonce donc commesuit.
Théorème 2.14. Pour S une surface de genre g ≥ 1, l’application φ 7→ φ∗ est un isomor-phisme entre Mod±(S) et Out(π1(Sg)).
Cette application est en plus un morphisme de groupes, car on a (f ◦ g)∗ = f∗ ◦ g∗. Ilfaut voir que cette application est bijective. L’injectivité est triviale, grâce à la propositionsuivante, que l’on trouve par exemple dans [Hat], proposition 1.B.9 :
Proposition 2.15. Soient X un espace connexe, Y un espace connexe par arcs de groupefondamental G admettant revêtement universel contractile, et un homomorphisme Φ :π1(X, x0) → π1(Y, y0). Alors il existe f : (X, x0) → (Y, y0) continue avec f∗ = Φ, etcette fonction est unique modulo homotopie fixant x0.
Comme g ≥ 1, la surface S a un revêtement universel qui est contractile (voir chapitre3) ; elle vérifie donc les propriétés de l’espace Y de la proposition précédente. Un homéo-morphisme qui induit l’homomorphisme identité est donc homotope à l’identité sur S, cequi montre l’injectivité.
Reste à montrer la surjectivité. Supposons que Φ représente une classe d’automorphismeextérieur de π1(S) : la proposition précédente affirme que l’on a une application φ : Sg → Sgcontinue telle que φ∗ = Φ. La suite de la démonstration consiste à montrer que φ est en faitune équivalence d’homotopie, et finalement, que les équivalences d’homotopies sont homo-topes à des homéomorphismes. La deuxième affirmation est le contenu du théorème 3.7 de[F-M], que l’on aurait pu inclure dans la section 1.2, et la première découle immédiatementdu théorème de Whitehead (voir par exemple théorème 4.5 de [Hat]) :
20

Théorème 2.16 (Whitehead). Si une application f : X → Y entre des CW-complexesconnexes induit un isomorphisme f∗ : πn(X)→ πn(Y ) pour tout n, alors f est une équiva-lence d’homotopie.
Ce qu’est exactement un CW-complexe n’est pas très important à ce stade : c’estintuitivement un espace obtenu en “recollant des cellules”, et ce qui est à retenir est queles surfaces sont de tels espaces. À nouveau, comme g ≥ 1, le revêtement universel de Sest H2 et donc les conditions du théorèmes sont satisfaites : φ est en fait une équivalenced’homotopie, qui est donc homotope à un homéomorphisme, ce qui montre la surjectivité.
3 Géométrie hyperboliqueDans cette section, l’espace hyperbolique sera défini et on citera ses propriétés les plus
utiles. Par la suite, on définira les surfaces hyperboliques comme des espaces localementisométriques à H, on fera un rapprochement avec la théorie des revêtements et cela nousdonnera une définition alternative des surfaces hyperboliques. Afin de ne pas répéter, laréférence pour les résultats de la première partie est [Kat] ; pour la partie algébrique, onpourra consulter [Hat].
3.1 Le plan hyperboliqueOn dit que le plan hyperbolique (réel), ou plus précisement le modèle du demi-
plan de Poincaré du plan hyperbolique est le sous-ensemble du plan complexe C définipar
H := {z = x+ iy | y > 0},
muni de la longueur hyperbolique : une courbe γ : I → H de classe C1 par morceaux aune longueur donnée par ∫ 1
0
√x′(t)2 + y′(t)2
y(t) dt,
où γ(t) = (x(t), y(t)). La distance hyperbolique entre deux points est la borne inférieuredes longueurs des courbes C1 par morceaux les reliant. On peut vérifier facilement que ceciest une distance induisant la topologie usuelle sur H, ce qui donne une structure d’espacemétrique à H. On veut maintenant étudier les isométries de H, c’est-à-dire les applicationsbijectives de H qui préservent les distances. On observe d’abord qu’elles sont forcémentcontinues. On note, comme il est de coutume,
SL(2,R) = {(a bc d
)| a, b, c, d ∈ R, ad− bc = 1},
etPSL(2,R) := SL(2,R)/{±Id}.
21

Ceci permet d’écrire chaque élément de PSL(2,R) comme ±x ∈ SL(2R). On a un mor-phisme injectif défini de PSL(2,R) sur les homéomorphismes de H :(
a bc d
)7−→ z 7→ az + b
cz + d.
Un calcul simple montre que cette action est en fait par isométries.On voudrait maintenant déterminer le groupe de toutes les isométries de H. Pour ceci,
nous avons besoin de définir une géodésique entre deux points x0, x1 ∈ H : c’est simple-ment le chemin le plus court, ou l’un des chemins les plus courts s’il en existe plusieurs,entre x0 et x1. Il est classique que les géodésiques maximales de H sont les demi-cerclescentrés sur l’axe réel ainsi que les demi-droites orthogonales à cet axe. Il s’en suit quedeux points quelconques sont joignables par une unique géodésique, et que leur distancehyperbolique est la longueur du segment géodésique qui les joint. Finalement, quelquesmanipulations et calculs démontrent le théorème suivant :
Théorème 3.1. Toutes les isométries de H sont du type
z 7→ az + b
cz + davec ad− bc = 1 ou z 7→ az + b
cz + davec ad− bc = −1.
Notons PS∗L(2,R) = S∗L(2,R)/{±Id}, où S∗L(2,R) est l’ensemble des matrices dedéterminant±1 ; alors on voit que PS∗L(2,R) contient PSL(2,R) comme sous-groupe d’in-dice 2. Toutes les transformations figurant dans l’énoncé du théorème forment un groupe,isomorphe à PS∗L(2,R). Comme PSL(2,Z) s’identifie à celles du premier type, qui estun sous-groupe d’indice 2 du groupe des isométries (noté Isom(H), correspondant auxisométries préservant l’orientation : on le note Isom+(H).
Considérons maintenant l’application (injective) f : H→ H donnée par
z 7→ z − iz + i
z ∈ H,
qui envoie H bijectivement sur le disque unité de C,
D = {w = u+ iv | u2 + v2 < 1}.
Ceci induit une métrique sur D, qui muni de cette métrique est appelé le modèle dudisque (de Poincaré) du plan hyperbolique. Explicitement, d∗(z, w) = d(f−1(z), f−1(w))définit une distance dans D, et f est une isométrie entre (H, dhyp) et (D, d∗), où dhyp est ladistance hyperbolique définie plus haut. Dans ce modèle, les géodésiques maximales sontles diamètres et les segments de cercles euclidiens orthogonaux au bord du disque D, oùl’on mesure les angles comme dans le plan euclidien. Ce modèle est parfois utile, commeon le verra par la suite.
Les théorèmes suivants sont valables pour le plan hyperbolique, et l’on peut les prouverplus facilement dans le modèle du demi-plan :
22

Théorème 3.2. 1. Si γ est une géodésique et p est un point de H n’appartenant pas àγ, alors il existe une unique géodésique passant par p orthogonale à γ.
2. Il existe une unique géodésique passant par deux points donnés distincts.3. Si a et b sont deux géodésiques à distance strictement positive, alors il existe une
unique géodésique orthogonale à a et à b.
Un domaine compact P ⊂ H est un polygone hyperbolique si son bord est unecourbe fermée simple géodésique par morceaux. On verra dans le paragraphe qui suitpourquoi cette définition est importante.
3.2 Surfaces hyperboliques et leurs géodésiquesOn reprend la notation de la section 1.2. Une surface sera supposée orientable et à bord
(éventuellement vide), et un atlas de coordonnées (U, φ) sera un sous-atlas d’une struc-ture différentiable. Supposons S sans bord. On dit qu’un atlas A de S est hyperboliquesi φ(U) ⊂ H et si les changements de cartes sont des restrictions d’isométries de H, surchacune des composantes connexes de leur domaine de définition.La définition pour les surfaces à bord est plus subtile, car elle doit tenir compte des “coins”et des “arêtes”, mais on peut se l’imaginer facilement (voir [Bus] pour les détails). Unatlas hyperbolique maximal de S s’appelle une structure hyperbolique sur S. Une sur-face munie d’une structure hyperbolique est appelée une surface hyperbolique : c’estessentiellement une surface localement isométrique à H.
On rappelle une définition : si un groupe Γ agit par homéomorphismes sur un espacetopologique X localement compact, de telle sorte que pout pour tout compact K de X,l’ensemble
{γ ∈ Γ | γ ·K ∩K 6= ∅}soit fini, alors on dit que l’action est proprement discontinue. On dit aussi qu’elle estlibre si elle agit sans points fixes, c’est-à-dire que γ · x = x implique γ = id. Le théorèmesuivant nous permettra d’établir un lien avec la théorie de revêtements (voir 1.2.4 de [Bus]par exemple pour une démonstration) :
Théorème 3.3. Soient S une surface hyperbolique et Γ ⊂ Isom+(S) un sous-grouped’isométries, agissant de façon proprement discontinue et sans points fixes. Alors le quo-tient S/Γ admet une structure hyperbolique uniquement déterminée telle que la projectionπ : S → S/Γ soit une isométrie locale.
Pour toute surface S, on peut former le revêtement universel de S, noté S ; c’estun espace simplement connexe qui admet un homéomorphisme local π : S → S appeléprojection, avec la propriété que chaque point p ∈ S ait un voisinage Up tel que la restric-tion de π à chaque composante connexe de π−1(Up) soit un homéomorphisme sur Up. Leshoméomorphismes g de S vérifiant π ◦ g = π forment le groupe du revêtement que l’onnote Aut(S). Comme π est un homéomorphisme local, le groupe Aut(S) agit discontinue-ment sur S. L’action est aussi libre. Ce groupe du revêtement a de plus la propriété que si
23

π(p) = π(q), pour p, q ∈ S, alors il existe un g ∈ Aut(S) tel que g(p) = q. Il s’en suit que
S = S/Aut(S).
Il existe un morphisme “presque canonique”
i∗ : π1(Sg, p)→ Aut(S)
défini comme suit : on choisit un p ∈ S au-dessus de p, c’est-à-dire π(p) = p. Chaque lacetγ d’origine p peut se relever au revêtement universel, et ce relèvement devient unique sil’on impose γ(0) = p. Soit q le point terminal de γ, qui est au-dessus de p : on a donc unélément gγ ∈ Aut(S) tel que gγ(p) = q. Cet élément gγ est unique, car les éléments non-nulsde Aut(S) n’ont pas de points fixes. On peut prouver (classique) que gγ ne dépend que dela classe d’homotopie de γ, ce qui montre que l’application [γ] 7→ gγ est bien définie. Lelemme 3.6.3. de [Sep] montre qu’une courbe dans S avec points terminaux z et gα(z) seprojette sur une courbe fermée de S homotope à α, d’où l’on déduit que l’application
i∗ : π1(Sg, p)→ Aut(S)
[γ] 7→ gγ
est bien un isomorphisme de groupes.Le résultat suivant est réelement ce qu’il nous sera utile de savoir sur les surfaces
hyperboliques. C’est une conséquence du théorème d’uniformisation de Riemann qu’il n’estpas question de prouver ici ; on pourra consulter le théorème 3.6.1 de [Sep] et la discussionqui s’en suit.
Théorème 3.4. Soit S le revêtement universel d’une surface Sg de genre g ≥ 2. Alorsl’intérieur de S est H. Si S est sans bord, S est H tout entier, et si S a des composantes debord, S est l’espace hyperbolique avec certains intervalles de son bord, correspondant auxcomposantes de bord.
On peut donc interpréter les éléments de Aut(S) comme des isométries de H. Onremarque aussi que dans le cas où Sg est à bord et g ≥ 2, Sg est revêtue par un polygonehyperbolique géodésique. D’après la discussion qui précède, toute surface Sg avec g ≥ 2peut s’exprimer sous la forme
Sg = H/Γ,où Γ est un un groupe qui agit discontinuement par isométries. D’après le théorème 3.3,tout quotient de ce type est une surface hyperbolique ; on peu donc définir de façon équi-valente une surface hyperbolique comme un tel quotient. Finalement, d’après ce mêmethéorème, il est naturel de définir l’équivalence entre deux telles surfaces par l’existenced’un isomorphisme de revêtements de Sg.
Il est utile d’avoir les deux points de vues : ainsi, on pourra définir une structurehyperbolique sur une surface Sg en donnant une action par isométries de π1(Sg) sur H(i.e. en explicitant Γ), ou bien en posant une métrique, ou finalement (par la premièredéfinition) par recollement de surfaces hyperboliques données.
24

3.2.1 Géodésiques
Le théorème 3.2 énoncé plus haut pour le plan hyperbolique peut se généraliser auxsurfaces hyperboliques ; on pourra consulter le théorème 1.5.2. de [Bus] :
Théorème 3.5. Soit S une surface hyperbolique et c : [a, b] → S une courbe avec a ∈ A,b ∈ B, où A et B sont des géodésiques fermées qui ne se rencontrent pas sur le bord deS. Dans la classe d’homotopie de c, avec extrémités dans A et B, il existe une uniquegéodésique γ qui rencontre A et B perpendiculairement aux extrémités.
Finalement, on a dans [Bus], proposition 1.6.6, une démonstration du théorème suivant.
Théorème 3.6. Soit S une surface hyperbolique compacte et c une courbe fermée nonhomotope a l’identité. Alors c est homotope à une unique géodésique γ, qui vérifie γ ⊂ ∂Sou bien γ ∩ ∂S = ∅ ; de plus si c est simple, alors γ est simple.
Ce dernier résultat est aussi valable pour des arcs dans S.
4 L’espace de TeichmüllerCette dernière section introduit le deuxième objet principal étudié dans ce document. Il
s’agit de définir précisemment l’espace de Teichmüller et prouver que l’application esquiséedans l’introduction est en effet une bijection. Pour ce faire, on montre d’abord commentdécomposer une surface de genre g ≥ 2 en pantalons, puis on décrit l’espace des hexagoneshyperboliques marqués, et finalement on explicite la bijection en question. Pour finir, onexhibera l’action naturelle du groupe modulaire de Teichmüller sur l’espace de Teichmüller,et on montrera pourquoi cette action n’est pas libre en général.
4.1 Définition de Teich(Sg)Soit S = Sg, avec g ≥ 2, une surface fermée orientée de genre g. L’espace de
Teichmüller de S, noté Teich(S), est l’ensemble des classes d’équivalence des paires
(X,φ)/ ∼
où X est une surface hyperbolique orientée, φ : S → X est un homéomorphisme, et(X1, φ1) ∼ (X2, φ2) si et seulement si l’application I := φ2 ◦φ−1
1 est homotope à une isomé-trie préservant l’orientation entre X1 et X2, c’est-à-dire si le diagramme suivant commute“à homotopie près” :
Sφ1
~~}}}}
}}}} φ2
AAA
AAAA
A
X1 I// X2
L’application φ s’appelle la marque et S la surface modèle. L’espace de Teichmüllerdécrit donc les surfaces hyperboliques marquées homéomorphes à S.
25

Pour chaque [(X,φ)] ∈ Teich(S), on peut voir les classes d’isotopie de courbes ferméessimples de X comme étant “indexées” par des éléments de C (0)(S). Ainsi, en abusant unpeu de la notation, on peut associer à un point X de Teich(S) une application
lX : C (0)(S)→ R+;
l’image d’une classe c est la longueur de l’unique géodésique dans la classe de φ(c), quiexiste d’après le théorème 3.6.
Si la surface hyperbolique est à bord, la définition de l’espace de Teichmüller ne changepas, sauf dans la définition de la relation d’équivalence : il faut demander que les homotopiessoient libres, c’est-à-dire qu’elles ne fixent pas forcément le bord.
4.2 Décomposition topologique en pantalonsLe début de la démonstration du théorème principal est de prouver que si P est un
pantalon, c’est-à-dire la surface compacte homéomorphe à la sphère avec trois compo-santes de bord (ou encore le disque à deux trous), alors Teich(P ) est en bijection avec R3
+.Ceci est en fait un homéomorphisme, mais comme nous n’avons pas défini de topologie surTeich(S), on montrera seulement qu’il s’agit d’une bijection. Les paires de pantalons sonten quelque sorte les “briques” avec lesquelles on assemble des surfaces, dans la mesure oùtoute surface compacte avec χ(S) < 0 se décompose en réunion de pantalons. Ceci nouspermettra de calculer Teich(S) pour n’importe quelle surface de genre g ≥ 2.
Plus précisement, on appelle décomposition en pantalons d’une surface S une col-lection maximale de classes d’isotopie distinctes de courbes fermées simples dans S. Lasurface obtenue en découpant S le long de ces courbes est une collection de paires depantalons. On remarque qu’étant donnée une surface de genre g ≥ 2, cette décompositionn’est pas unique ; voir figure 9. Cependant, la proposition suivante montre que le nombrede courbes dans la décomposition, ainsi que le nombre de pantalons qu’elle détermine, esten effet unique.
Figure 9 – Deux possibles décompositions différentes pour g = 2.
Proposition 4.1. Toute surface S de genre g ≥ 2 se décompose avec 3g−3 courbes ferméessimples en 2g − 2 pantalons.
On remarque au passage que le nombre 2g − 2 est égal à −χ(S) si S n’a pas decomposantes de bord ; il est également vrai que si S = Sg,n, alors on peut trouver unedécomposition avec −χ(Sg,n) pantalons.
26

Démonstration. On commence par constater que l’énoncé de la proposition est purementcombinatoire. En effet, une décomposition en pantalons peut s’interpréter comme un graphetripartite non orienté : chaque pantalon correspond à un sommet, chaque arête à unecourbe fermée simple de la décomposition, et on place une arête entre deux sommets (nonnécessairement distincts) si la courbe correspondante est sur les bords des deux pantalonscorrespondants. Le fait que le graphe soit tripartite veut simplement dire que le grapheest connexe et que de chaque sommet émanent exactement trois arêtes. Par exemple,les décompositions de la figure 9 correspondent aux graphes de la figure 10. Soit P une
Figure 10 – Graphes correspondants aux décompositions de la figure 9.
décomposition en pantalons pour S. Avec l’interpretation ci-dessus, en notantM le nombrede sommets et N le nombre d’arêtes, en comptant de deux façons différentes le nombre de“demi-arêtes”, on observe que 3M = 2N . D’autre part, soit L dans P une courbe ferméesimple du système, n1 le nombre de composantes connexes de S − L, et g1 la somme desgenres de ces composantes. Alors S − L a deux composantes de bord et on a
g1 − n1 = (g − 1)− 1,
En effet, considérons les deux cas possibles : si L sépare S, alors g1 = g et n1 = 2 ; si Lne sépare pas, alors g1 = g − 1 et n1 = 1. En itérant cette construction, après retirer lak-ième courbe on a soit gk = gk−1 et nk = nk−1 + 1, ou soit gk = gk−1 − 1 et nk = nk−1, cequi donne dans tous les cas
gk − nk = gk−1 − nk−1 − 1 = gk−2 − nk−2 − 2 = · · · = (g − 1)− k.
Le processus s’arrête lorsque k = N , le nombre de courbes de P , et donc
gN − nN = (g − 1)−N.
Comme les pantalons ont genre 0, on a gN = 0, et comme par définition nN = M , cetteéquation se réduit à 0−M = (g− 1)−N . La relation 3M = 2N nous permet de conclure.�
4.3 Classification des pantalons hyperboliquesOn commence par classifier les hexagones hyperboliques (à bord géodésique). On appelle
hexagone marqué un hexagone hyperbolique dans le sens de la section 3, sur lequel on
27

a choisi un sommet distingué. Soit H l’ensemble des classes d’équivalence d’hexagonesmarqués, à angle droits, où l’équivalence est par isométries préservant l’orientation de Het préservant le sommet distingué. Pour la démonstration de la proposition suivante, onutilise fortement des propriétés de H, rappelées au théorème 3.2.Proposition 4.2. Il existe une bijection entre R3
+ et H, définie par les longueurs de troiscotés non-adjacents, en commençant par le sommet marqué et parcourus dans l’ordre tri-gonométrique.Démonstration. Étant donnés l1, l2, l3, on construit un hexagone marqué à angle droits,avec les longueurs des cotés préscrits par ces 3 réels positifs (d’où la surjectivité) ; on verraque les choix n’affectent pas la classe d’équivalence de l’hexagone avec la relation ci-dessus,ce qui prouvera l’unicité (d’où l’injectivité).
On fixe le point privilégié sur i ∈ H ; la construction qui suit est illustrée sur la figure11. Soit β la géodésique qui passe par l’origine et par i. Soit α l’unique géodésique à dis-
β
l1γ
l2
l3
α
Figure 11 – Construction de l’hexagone.
tance l1 de i (unique si l’on se fixe un côté de β). Soit B la portion de droite euclidienne{z | d(z, β) = l2}, qui se situe du même côté de β que α (ceci est bien une droite eucli-dienne car z 7→ λz est une isométrie). Considérer γ, une géodésique tangente à B, telleque d(γ, α) = l3, et soit x = B ∩ γ. Par construction, la distance de γ à β est l2. L’hexa-gone formé par les segments géodésiques l1, α, l3, γ, l2, β (comme sur la figure), avec i poursommet distingué, est bien un élément de H. Le seul problème possible pour l’unicité estla construction de γ : il n’est pas immédiat qu’il existe une unique géodésique tangente àune droite donnée à une distance fixée d’une autre géodésique.
28

On se concentre sur la portion de la figure formée par B, α, et x = B ∩ γ. Étant donnéle point de tangence x sur B, la géodésique γ(|x|) se construit en prenant pour centre (ducercle définissant la géodesique) l’intersection de la normale (euclidienne) à B par x et l’axehorizontal. Il est clair qu’il existe un unique x0 sur un côté donné de B tel que γ(|x0|) esttangente aussi à α. Il suffit de montrer que la distance d(γ(|x|), α) croît de façon monotonelorsque |x| croît. Or, ceci est clair : si d(α, γ(|x|)) > 0, on a une portion de géodésique σorthogonale aux deux géodésiques considerées, et γ(|x|+ε) se situe “à droite” de γ(|x|) : soity = γ(|x|+ε)∩γ(|x|). Alors d(γ(|x|+ε), α) = (γ(|x|+ε), y)+d(y, α) > d(y, α) > d(γ(|x|), α),ce qui termine la démonstration. �
Un pantalon hyperbolique est obtenu de façon naturelle en recollant deux hexagoneshyperboliques. Le théorème suivant formalise cette idée.
Théorème 4.3. Soit P un pantalon de composantes de bord α1, α2, α3. L’applicationTeich(P )→ R3
+ définie par
X 7→ (lX(α1), lX(α2), lX(α3)) (1)
est bijective.
Démonstration. Compte tenu de la proposition précédente, il suffit de donner une bijec-tion entre Teich(P ) et H.Soit (X,φ) ∈ Teich(P ). On note aussi αi les composantes du bord de X, sous la marque φ.Pour chaque paire de bords αi, αj, il existe une unique classe d’isotopie d’arcs les reliant ;soit δij = δji l’unique géodésique dans chaque classe, qui est en plus perpendiculaire auxαi, αj. Les adhérences des composantes de X −⋃ δij sont deux hexagones hyperboliques àangle droit H1, H2, qui sont isométriques par la classification des hexagones, car ils ont tousdeux des côtés de longueur δij. Soit H ⊂ H un hexagone droit marqué, image isométriquede l’hexagone marqué H1, où l’image de δ13 ∩ α1 est la marque, et les images des bords αisont dans l’ordre usuel(trigonométrique). La classe d’équivalence de H est un élément deH.
Décrivons l’inverse. Soit H un hexagone droit marqué, représentant un élément de H.Soit H ′ sa réfléction sur le premier segment dans l’ordre inversé (horaire), à partir du pointmarqué. Notons les bords comme sur la figure 12, et formons un pantalon X en identifiantles δ12 et les δ23. On prend pour marque n’importe quel φ : P → X qui envoie les bordsα1, α2, α3 sur les bords de X marqués avec le même symbole. Ceci établit bien une inversepour la première application, ce qui suffit pour conclure. �
4.4 Coordonnées de Fenchel-NielsenSoit S une surface de genre g ≥ 2. On a vu qu’on peut la décomposer avec 3g −
3 courbes (orientées) en pantalons, et si S est munie d’une structure hyperbolique, onpeut s’arranger pour que ces courbes soient en fait des géodésiques de la surface ; on seretrouve donc avec 2g − 2 pantalons hyperboliques à angles droits, el les 3g − 3 longueurs
29

Figure 12 – L’inverse de l’application X 7→ (lX(α1), lX(α2), lX(α3)) .
de leurs composantes de bord déterminent de façon unique leur structure hyperbolique.Intuitivement, la structure hyperbolique de la surface sera déterminée si on se donne les“angles” 2 avec lesquels on “recolle” les pantalons entre eux. Il s’agit bien de twists de Dehnque l’on effectue le long de ces géodésiques. Ces “coordonnées” sont donc paramétrées parR3g−3
+ × R3g−3 ∼= R6g−6. Notre objectif est maintenant de formaliser ceci et de prouver lethéorème classique suivant, dut à Fricke et Klein vers 1897 :
Théorème 4.4. Soit S une surface de genre g ≥ 2. Alors Teich(Sg) est homéomorphe àR6g−6.
Comme nous n’avons pas défini de topologie sur Teich(S), on se limitera a prouver qu’ilexiste une bijection entre Teich(Sg) et R3g−3
+ × R3g−3.
Démonstration. On commence par fixer une décomposition de S en pantalons, que l’onnote P = {c1, . . . , c3g−3}, où les ci sont orientées. On fixe un système de “coutures” de lafaçon suivante : on choisit deux points distincts sur chaque ci, et on construit sur chaquepantalon trois courbes simples disjointes reliant chaque point de ci avec un point de cjpour ci, cj dans le même pantalon et i 6= j. On se retrouve donc avec un ensemble finide courbes fermées simples et disjointes sur S, noté Q, tel que la restriction de Q à unpantalon donné par P soit un ensemble de trois courbes disjointes reliant les composantesde bord. On appelle un tel ensemble Q un système de coutures, que l’on fixe pour le restede cette démonstration. La paire (P ,Q) est le “système de coordonnées”.
(X,φ) ∈ Teich(S). Les coordonnées de Fenchel-Nielsen de X sont données par unpoint dans R3g−3
+ × R3g−3 ; les premières coordonnées sont les paramètres de longueuret les dernières les paramètres de couture. Les premiers se définissent facilement par
li := lX(ci) i = 1, . . . , 3g − 3.
2. Si on oublie la marque, et on ne s’interesse qu’au type d’isométrie de la surface, alors ces angles nevarieront qu’entre 0 et 2π.
30

Pour définir les paramètres de couture θi, qui mesurent “l’angle du recollement par rapportaux coutures données”, on peut supposer que les φ(ci) (que l’on note encore ci) sont déjàles géodésiques dans leur classe d’isotopie. On introduit d’abord la notion d’angle detwist d’un arc β dans un pantalon hyperbolique reliant deux de ses composantes de bordorientées γ1 et γ2 : soit δ l’unique géodésique perpendiculaire à γ1 et à γ2, N1 et N2 deuxvoisinages réguliers de γ1 et γ2 respectivement ; modifions β (par une isotopie fixant lesextrémités) en un arc, toujours appelé β, qui coïncide avec δ en dehors de N1 ∪N2. Voir lafigure 13 (où l’on ne représente pas les Ni). Dans le revêtement universel de N1, le relevé
Figure 13 – Calcul de “l’angle de twist d’un arc”.
de β est un arc, et l’angle de twist de β par rapport à γ1 est par définition le déplacementhorizontal (pris avec signe) entre β ∩ γ1 et β ∩ ∂N1 (= δ ∩ ∂N1). On remarque que cettedéfinition ne dépend pas du choix des voisinages réguliers. Intuitivement, ce nombre mesurela distance sur γ1 entre l’arc donné et la géodésique qui lui correspond, en comptant “lenombre de tours”. L’observation cruciale à ce stade est que l’angle de twist est bien défini.
Maintenant, le paramètre de couture θi est facile à définir. Soit bj une des couturestraversant ci (il y en a exactement deux). De chaque côté de ci il y a un pantalon danslequel bi forme un arc. Soient t, t′ les angles de twist de ces arcs, respectivement du côtégauche et droit de ci, et on pose
θi = 2π t− t′
lX(ci).
Pour voir ce que ce nombre représente, considérons le revêtement d’un voisinage régulier Nde ci ; la couture bj, une fois modifiée comme plus haut, relie les relevés de deux géodésiques
31

orthogonales δi et δ′i, perpendiculaires à ci : le nombre t− t′ est leur distance (avec un signedéterminé par l’orientation de ci). Voir la figure 14. Il faut vérifier que θi ne dépend pas
Figure 14 – θi est bien défini.
de la couture choisie. Si on avait choisi l’autre couture Bj (non représentée sur la figure),le procédé de calcul pour l’angle de twist nous force à considérer les autres géodésiquesorthogonales à ci de chaque côté, notées ∆i et ∆′i. Cependant, on a vu dans la démonstrationdu théorème 4.3 qu’un de nos pantalons est décomposé en deux hexagones hyperboliques(déterminés par δi et ∆i) qui sont isométriques, donc la géodésique ci est coupée en deuxparties d’égale longueur par les extrémités de ∆i et δi, et par conséquence chaque copiede ∆i se situe au milieu de deux relevés de δi ; idem pour ∆′i. Comme les coutures sontdisjointes, une courbe reliant deux relevés ∆i à ∆′i (non représentée sur la figure) relieforcément deux relevés à distance t− t′, d’où l’indépendance du choix de la couture.
Pour montrer la bijectivité de l’application, on décrit son inverse. Soient
(l1, . . . , l3g−3, θ1, . . . , θ3g−3) ∈ R3g−3+ × R3g−3
des paramètres arbitraires ; on va construire un point (X,φ) ∈ Teich(S) aux coordon-nées de Fenchel-Nielsen égales à ce (6g − 6)-uplet, par rapport au même système (P ,Q).Pour chaque triplet de courbes {ci, cj, ck} qui appartiennent à un unique pantalon Pi,j,k,construire le pantalon hyperbolique Xi,j,k qui a des composantes de bord de longueurli, lj, lk, notées dm, qui ont une orientation induite par P . On se permet de choisir desci, cj, ck non nécessairement distinctes, afin de considerer aussi les pantalons comme ceuxde la figure 9. Par 4.2, il n’y a qu’une façon de construire les Xi,j,k.
32

Pour chaque Xi,j,k et pour chaque paire de composantes de bord, on construit l’uniquegéodésique les reliant ; on modifie cet arc sur un voisinage régulier du côté gauche de chaquedm (ou on ne le modifie pas si le côté gauche “n’existe pas”) comme suit : remplacer l’arcgéodésique par un arc qui voyage sur dm une distance orientée de (θm/2π)lm. Le résultatest unique modulo isotopie fixant le bord de Xi,j,k. On construit finalement une applicationde la réunion disjointe des Xi,j,k sur X = S, en envoyant chaque Xi,j,k sur le pantalon Pi,j,kcorrespondant, chaque dm sur la courbe cm de P correspondante, et chacun des arcs quel’on vient de construire sur les morceaux de coutures préscrites par Q. En “poussant” lamétrique, on obtient une métrique hyperbolique sur X, et si la marque φ : S → X estl’identité, le point [(X,φ)] est un élément de Teich(S) qui par construction a les coordonnéesde Fenchel-Nielsen désirées. Ceci termine la démonstration. �
Pour finir, on remarque que si la surface S = Sg,n a n composantes de bord, la décom-position en pantalons a 3g− 3 + n courbes (sans compter les bords), et les coordonnées deFenchel-Nielsen pour S sont 3g− 3 + 2n paramètres de longueur et 3g− 3 + n paramètresde couture. On obtient donc
Teich(Sg,n) = R6g−6+3n.
4.5 L’action de Mod(S) sur Teich(S)On décrit l’action naturelle de Mod(S) sur Teich(S). On n’arrivera pas à prouver que
l’action est proprement discontinue, ce qui est vrai (voir chapitre 11 de [F-M] par exemple),mais on se contentera de montrer que le stabilisateur d’un élément est fini.
L’action de Mod(S) sur Teich(S) correspond intuitivement à “changer la marque”.Formellement, pour f ∈ Mod(S), et ψ ∈ Homeo+(S) un représentant de f , l’action estdéfinie par
f · [(X,φ)] = [(X,φ ◦ ψ−1)].
Le choix de l’exposant −1 permet d’avoir une action bien définie à gauche, et on peutformer le quotient topologique
Teich(S)/Mod(S),
qui peut s’interpréter comme “l’espace des structures hyperboliques (non-marquées)” surS : en effet, si [(X,φ)] et [(Y, ψ)] sont des points de Teich(S) avec X isométrique à Y viaI : X → Y , en notant F la classe de ψ−1 ◦ I ◦ φ, on a
Sψ−1◦I◦φ //
φ ��@@@
@@@@
Sψ
��???
????
I−1◦ψ~~~
��~~~
XI
// Y
F · [(X,φ)] = [(X,φ ◦ (ψ−1 ◦ I ◦ φ)−1)] = [(X, I−1 ◦ ψ)] = [(Y, ψ)]
et donc Mod(S) identifie ces deux points de Teich(S).
33

Il découle des définitions que h · [(X,φ)] = [(X,φ)] si et seulement si φ ◦ ψ−1 ◦ φ−1 estisotope à une isométrie préservant l’orientation de X, où ψ est un représentant de h dansMod(S). C’est-à-dire que si h ∈ Stab([(X,φ)]), alors on peut lui associer une isométrie deX. Inversement, si I ∈ Isom+(X), on peut lui associer l’élément [φ−1 ◦ I−1 ◦φ] ∈Mod(S),qui a la propriété d’être dans le stabilisateur de [(X,φ)], par ce qui précède. Comme lesdeux opérations sont naturellement inverses l’une de l’autre, et comme évidemment cettedernière association est un morphisme de groupes, on a démontré la proposition suivante :
Proposition 4.5. Soit [(X,φ)] ∈ Teich(S). Alors les groupes Isom+(X) et Stab([(X,φ)])sont isomorphes.
Le théorème suivant montre que le groupe des isométries d’une surface hyperboliqueest fini, et donc un élément h ∈ Stab([(X,φ)]) est d’ordre fini dans Mod(S). On pourraen conclure que l’obstruction à que l’action soit libre est due entièrement à la torsion deséléments dans Mod(S).
Théorème 4.6. Si X est une surface hyperbolique homéomorphe à Sg, avec g ≥ 2, touteisométrie isotope à l’identité est l’identité et Isom(X) est fini.
Démonstration. Il suffira de montrer que Isom(X) est compact (dans la topologie dela convergence ponctuelle) 3, puis que Isom(X) est discret, un discret compact étant fini.Mais le théorème d’Arzelà-Ascoli donne immédiatement la compacité, la condition d’équi-continuité étant automatiquement vérifiée pour des isométries.
Il reste à montrer que Isom(X) est discret. On fait ceci en montrant que l’intersectionde Isom(X) avec Homeo0(X), la composante connexe de l’identité dans Homeo(X), est unseul point (l’application identité, évidemment). Fixons un système de géodesiques simplesS = {α1, . . . , αk} en position minimale comme sur la figure 15 ; un examen atentif de la
Figure 15 – La décomposition S, ici pour g = 3.
figure nous permet de constater que X−⋃αi est une surface homéomorphe au disque. Soitφ une isométrie isotope à l’identité. L’action de φ sur C (0)(S) est triviale : par l’unicitédes géodésiques dans une classe d’isotopie donnée, la géodésique gα de la classe α estinvariante : φ(gα) = gα. Comme chaque courbe en coupe une deuxième qui est elle aussi
3. En fait, le groupe d’isométries de n’importe quel espace métrique compact est un espace topologiquecompact : voir 29.4 de algebra VI
34

invariante, en a qu’en fait φ fixe vaut l’identité sur le système de géodésiques αi. On peutfinir en observant que sur la cellule X −⋃αi, φ est une isométrie fixant le bord, et commeune isométrie fixant le bord d’une surface doit être l’identité, on en conclut que φ vautl’identité sur X tout entier. �
Références[Bus] Buser, P. Geometry and Spectra of Compact Riemann Surfaces. Progress in Mathe-
matics, volume 106. Birkhäuser Verlag. 1992.[Eps] Epstein, D. Curves on 2−manifolds and isotopies. Acta Math., 115 : 83–107. 1966.[F-M] Farb, B. and Margalit, D. A primer on mapping class groups. Version préliminaire
en ligne. 2009.[Thu] Fathi, A. Double décomposition d’une surface en pantalons. Dans : Travaux de
Thurston sur les surfaces. Seminaire Orsay, exposé 4, appendice. . Astérisque 66–67,1979.
[Hat] Hatcher, A. Algebraic Topology. Cambridge Universityy Press. 2002.[Hir] Hirsch, M. Differential Topology. Springer-Verlag, Graduate texts in Mathematics 33.
1976.[Ima] Imayoshi, Y. and Taniguchi, M. An introduction to Teichmüller spaces. Springer-
Verlag. 1992.[Iva] Ivanov, N.V. Mapping class groups ; dans Handbook of Geometric Topology, Amster-
dam, 523–633. 2002.[Kat] Katok, S. Fuchsian Groups. The University of Chicago Press. 1992.[Mu1] Munkres, J. Some applications of triangulation theorems (thesis). U. of Michigan.
1955.[Mu2] Munkres, J. Obstructions to the smoothening of piecewise differentiable homeomor-
phisms. Ann. of Math (2), 72 : 521–554. 1960.[Ran] Rankin, R. Modular forms and functions. Cambridge University Press. 1977.[Rey] Reyssat, E. Quelques aspects des Surfaces de Riemann. Progress in Mathematics,
volume 77, Birkhäuser-Verlag. 1989.[Sep] Seppälä, M. and Sorvali, T. Geometry of Riemann surfaces and Teichmüller spaces.
North-Holland mathematics studies 169. Elsevier Science. 1992.
35