Embed Size (px)
DESCRIPTION
http://www.teslaconcursos.com.br/download/galeria/matematicaexemplo.pdf
Citation preview
62
www.teslaconcursos.com.br
Álgebra linear
Tópicos
• Vetores
• Transformações lineares
• Sistemas lineares
• Autovalores e autovetores
• Espaços e subespaços
• Matrizes
Teoria
Vetores
Definição: Os vetores representam
quantidades que possuem magnitude
e direção, como por exemplo as
grandezas força e velocidade. Essas
grandezas podem ser representadas
por setas que possuem comprimento
e direção, e partem de um ponto de
referência O, e assim são definidos os
vetores.
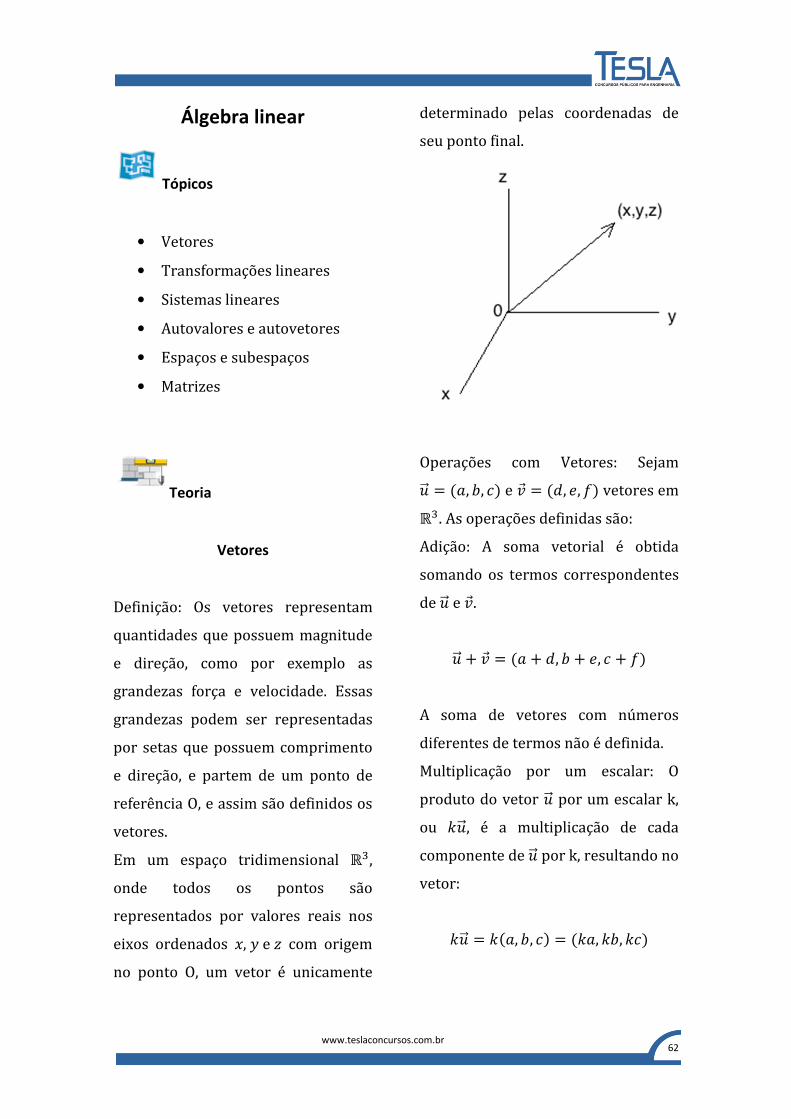
Em um espaço tridimensional ��,
onde todos os pontos são
representados por valores reais nos
eixos ordenados �,�e� com origem
no ponto O, um vetor é unicamente
determinado pelas coordenadas de
seu ponto final.
Operações com Vetores: Sejam �� ��, �, �� e � ��, �, �� vetores em ��. As operações definidas são:
Adição: A soma vetorial é obtida
somando os termos correspondentes
de �� e �. �� � � �� � �, � � �, � � ��
A soma de vetores com números
diferentes de termos não é definida.
Multiplicação por um escalar: O
produto do vetor �� por um escalar k,
ou ���, é a multiplicação de cada
componente de �� por k, resultando no
vetor:
��� ���, �, �� ���, ��, ���

63
www.teslaconcursos.com.br
Propriedades (1): Considere agora os
vetores ��, � e ��� em �� e os escalares �� e �� em �. Então:
��� � �� � ��� �� � �� � ���� �� � 0 �� �� � ����� 0 �� � � � � �� ����� � �� ���� � ��� ��� � ����� ���� � ���� �������� �������� 1�� ��
Espaços Vetoriais
Definição: Considere o campo escalar � e um conjunto não vazio � com
duas operações:
Adição: Atribui a qualquer vetor ��, � pertencente a � a soma �� � � em �;
Multiplicação Escalar: Atribui a todo �� pertencente a �, � pertencente a �
um produto ��� pertencente a �;
Então � é chamado Espaço Vetorial,
no campo �. Observe que o campo
escalar pode ser visualizado como um
espaço n-dimensional, com um
número real � ou complexo ℂ
relacionado a cada ponto no espaço.
Para quaisquer ��, �, ��� pertencentes a � e ��, �� pertencentes a �, as
propriedades (1) dos vetores são
satisfeitas.
Notação:
� – Um dado espaço vetorial ��, �, ��� – Vetores em � � – Campo escalar ��, �� – Escalares em � �� ∈ " – Elemento �� pertence
ao conjunto " ��, �� ∈ " – Elementos �� e ��
pertencem a " ∀� ∈ " – Para qualquer x em " ∃� ∈ " – Existe x pertencente
a " " ⊆ & – " é um subconjunto
de & " ∪ & – União de " e & " ∩ & – Intersecção de " e & ∅ – Conjunto vazio
Subespaços Vetoriais
Definição: Considere � um espaço
vetorial em um campo escalar �, e *
um subconjunto de �. Então, * é um
subespaço se ele próprio for um

64
www.teslaconcursos.com.br
espaço vetorial em � com relação às
operações de adição vetorial e
multiplicação por um escalar em �.
Observações:
Todo subespaço * deve conter o
vetor nulo devido à propriedade �� � 0 ��. Todo espaço vetorial � admite pelo
menos 2 subespaços, ou subespaços
triviais. São eles o conjunto formado
pelo vetor nulo +0, e o próprio espaço �.
Um exemplo de subespaço não trivial
é o subespaço - formado por todos os
vetores �� do espaço vetorial � ��
que possuem seus componentes
iguais; - +��, �, ��|� � �,
Propriedades: Se - e * são
subespaços do espaço vetorial �,
então -⋂* e - �* também são
subespaços vetoriais.
Combinação Linear
Definição: Seja � um espaço vetorial
em �. Um vetor � em � é uma
combinação linear de vetores ������, ������, … , �1����� em � se existem
escalares ��, ��, … �1 em � tal que:
� �������� � �������� � ⋯�1�1�����,
O conjunto - de todos os vetores
formados da combinação linear de ���, … , ��1 é um subespaço vetorial. -
é chamado de subespaço gerado por ���, … , ��1 e é denotado por
- 3���, … , ��14
Exemplo
Suponha que se queira expressar � �3,7, �4� em �� como uma
combinação linear dos vetores ������ �1,2,3�, ������ �2,3,7�, ������ �3,5,6�. Encontre os escalares �, �e� que possibilitem a
combinação linear � ������� � ������� ��������.
Solução:
; 37�4< � ;123< � � ;237< � � ;356< ou
= � � 2� � 3� 32� � 3� � 5� 73� � 7� � 6� �4

65
www.teslaconcursos.com.br
Resolvendo o sistema, tem-se � 2, � �4, � 3. Portanto � 2������ �4������ � 3������.
Dependência e Independência Linear
Definição: Seja � um espaço vetorial
em �. Os vetores ��, … , �1 em � são
linearmente dependentes se existem
escalares ��, ��, … �1 em �, sendo ao
menos um �> ? 0, tal que:
�������� � �������� � ⋯�1�1����� 0
Caso contrário, os vetores são
linearmente independentes.
Teorema: Um conjunto +��, … , �1, é linearmente dependente
se e somente se pelo menos um
destes vetores é combinação linear
dos outros.
Exemplo
Defina se os vetores ������ �1,1,0�, ������ �1,3,2� e ������ �4,9,5� são
linearmente dependentes ou
independentes.
Solução:
Se � 3, � 5 e � �2,
3������ � 5������ � 2������ 3�1,1,0� � 5�1,3,2�� 2�4,9,5� �0,0,0� Portanto, os vetores são linearmente
dependentes.
Exemplo
Defina se os vetores ������ �1,2,3�, ������ �2,5,7� e ������ �1,3,5� são
linearmente dependentes ou
independentes.
Solução:
� ;123< � � ;257< � � ;135< ;000< Resulta no sistema
=� � 2� � � 0� � � 02� 0
que implica em � 0, � 0 e � 0.
Portanto, os vetores são linearmente
independentes.
Base de um Espaço Vetorial
Definição: Um conjunto - +������, ������, … , �1�����, é uma base de �
se - for linearmente independente, e
se - for um subespaço vetorial
gerado por ���, … , ��1 (- 3���, … , ��14).
Observações:

66
www.teslaconcursos.com.br
Qualquer base de � tem o mesmo
número A de vetores. A é chamado de
dimensão de B, denotado por dim�.
Se dim� A, então qualquer
conjunto de A vetores LI é uma base.
Qualquer conjunto com mais de A
vetores é necessariamente LD.
Teorema: Sejam - e * subespaços de
um espaço vetorial �, então dim- F dim�, dim* F dim� e
dim�- �*� dim- � dim*� dim�- ∩*�
Produto Interno
Definição: Seja � um espaço
vetorial real. Suponha que para cada
par de vetores �, � ∈ � é atribuído
um número real, denotado por ⟨�, �⟩. Essa função é chamada de produto
interno real em � se os seguintes
axiomas são satisfeitos:
Linearidade: ⟨��� � ���, �⟩ �⟨��, �⟩ � �⟨��, �⟩ Simetria ou Homogeneidade: ⟨�, �⟩ ⟨�, �⟩ Positividade: ⟨�, �⟩ I 0; ⟨�, �⟩ 0seesomentese� 0
Exemplo
Seja � o espaço vetorial real com
produto intrno. Pela linearidade:
⟨5�� � 6�� � 7��, �� � 2��⟩ 5⟨��, ��⟩ � 10⟨��, ��⟩� 6⟨��, ��⟩ � 12⟨��, ��⟩� 7⟨��, ��⟩ � 14⟨��, ��⟩
Norma Vetorial
A norma vetorial é uma propriedade
definida dentro do espaço vetorial
com produto interno. Sabendo que o
produto interno ⟨�, �⟩ é não negativo
para qualquer vetor ��, sua raiz
quadrada existe. Dessa forma a
norma do vetor é definida por:
‖�‖ K⟨�, �⟩
Se ‖�‖ 1 ⟨�, �⟩, então � é
chamado de vetor unitário ou
normalizado.
Produto escalar
É um caso especial de produto
interno. No espaço Euclideano ��, o
produto escalar é definido por:
�� ⋅ � ���� � ���� �⋯� ����

67
www.teslaconcursos.com.br
onde �� ��>� e � ��>�.
Norma em �M
A norma ‖�‖ do vetor � ��>� no
espaço Euclideano é:
‖�‖ √� ⋅ � O��� � ��� �⋯���
Ângulo entre Vetores
Para quaisquer vetores não nulos � e � em um espaço vetorial com produto
interno �, o ângulo entre � e �, P, é tal
que 0 F P F Q e
cos P ⟨�, �⟩‖�‖‖�‖
Exemplo
Considere os vetores �� �3,4,5� e � �2,�5,4� em ��. Calcule o ângulo
entre eles.
Solução: ⟨�, �⟩ 6 � 20 � 20 6 ‖�‖ √9 � 16 � 25 √50 5√2 ‖�‖ √4 � 25 � 16 √45 3√5
�UV P 615√10 2
5√10
P �W��UV 25√10 82,73°
Note que, sendo �UV P positivo, o
ângulo é agudo.
Ângulos Ortogonais
Dois vetores ��, � ∈ �, sendo � o
espaço vetorial com produto interno,
são ortogonais se ⟨�, �⟩ 0 ou cos P 0, isto é, P Z�.
Transformações Lineares
Definição: Sejam � e - dois
espaços vetoriais no mesmo campo
escalar �. A transformação linear [ é
uma função de � em -,
[: � ⟶ -
que satisfaz as condições:
Para qualquer vetor �, � ∈ �,
[�� � �� [��� � [���;
Para qualquer escalar � e vetor � ∈ �,
[���� �[���.
A transformação linear preserva as
duas operações básicas de um espaço
vetorial, a adição e a multiplicação
por um escalar, como foi mostrado
nas duas propriedades acima.

68
www.teslaconcursos.com.br
Exemplo
A função ^��, �� �� � 2, � � 3�, ^:�� ⟶��, adiciona o vetor �2,3� a
qualquer vetor � ��, �� em ��. Note
que ^�0� ^�0,0� �2,3�. Portanto,
o operador ^ não é linear, já que ele
não mapeia o vetor nulo em um vetor
nulo.
Autovalores e Autovetores
Definição: Seja " uma matriz
quadrada qualquer. Um escalar _ é
chamado de autovalor de " se existir
um vetor coluna � tal que:
"� _�
Qualquer vetor que satisfaça essa
relação é chamado autovetor de "
associado ao autovalor _.
Exemplo
Seja " `3 12 2a, ������ ` 1�2a e ������ `11a. Então,
"������ `3 12 2a ` 1�2a ` 1�2a ������
"������ `3 12 2a `1
1a `44a 4������
Portanto, os autovalores são:
_� 1 e _� 4
Polinômio Característico
Considere o sistema de equações
lineares do
Exemplo
= � � 2� � 3� 32� � 3� � 5� 73� � 7� � 6� �4
Esse sistema pode ser escrito da
seguinte forma:
"�� �
Sendo
" ;1 2 32 3 53 7 6<, �� b���c, � ; 37�4<
A equação "�� � pode ser vista
como uma transformação linear que
mapeia um dado vetor �� em um novo
vetor �. Vetores que podem ser
transformados em múltiplos de si
mesmos, como � _��, são muito

69
www.teslaconcursos.com.br
importantes para encontrar soluções
para a equação
"�� _�� ou �" � _d��� 0.
A equação acima possui soluções não
nulas se e somente se
∆�_� det�" � _d� 0.
O polinômio ∆�_� é chamado de
polinômio característico, sendo que
os valores de _ que satisfazem ∆�_� são os autovalores da matriz " e as
soluções não nulas para �� são os
autovetores correspondentes à _.
Diagonalização de Operadores
Definição: Considere o operador
linear [: � ⟶ �. Se [ puder ser
representado por uma matriz
diagonal, [ é diagonalizável. Neste
caso, deverá existir uma base - +��, ��, … ��, de � para a qual
[���� ����, [���� ����, … , [���� ����
A base - de � consiste dos
autovetores de [, e os elementos da
matriz diagonal h +��, ��, … , ��, são os autovalores correspondentes.
[��>� �>�>
sendo �> um vetor não nulo.
Teorema: Os autovetores não nulos ��, ��, … �� de um operador linear [,
associados a autovalores distintos ��, ��, … ��, são linearmente
independentes.
Matrizes
Definição: Uma matriz é uma
distribuição retangular de elementos
na forma:
A ja��a��⋯al�a��a��⋯al�
⋯⋯…⋯a�Ma�M⋯alM
m
Sendo as linhas da matriz A as m
distribuições horizontais de
escalares:
�a�� a�� ⋯ a�M� até �al� al� ⋯ alM�;
e as colunas de A as n distribuições
verticais de escalares:

70
www.teslaconcursos.com.br
ja��a��⋯al�m até ja�Ma�M⋯alM
m.
Note que o elemento ano pertence à
linha i e à coluna j.
Notação:
A panoq
Matriz de m linhas e n colunas: mr n.
Matriz linha ou vetor linha: Matriz
formada por apenas uma linha
(m 1).
Matriz coluna ou vetor coluna: Matriz
formada por apenas uma coluna n 1.
Matriz Nula: Matriz cujos elementos
são todos iguais a zero (ano 0, para
todo i e j).
Matriz Real: Matriz cujos elementos
são todos números reais; também
chamada de matriz em �.
Matriz Complexa: Matriz cujos
elementos são todos números
complexos; também chamada de
matriz em ℂ.
Matriz Transposta: A matriz
transposta, At, é obtida ao distribuir
as colunas de uma matriz A no lugar
de suas linhas, mantendo a ordem dos
elementos envolvidos. Por exemplo,
`1 2 34 5 6at b1 423 56c
Do exemplo acima, se A panoq é uma
matriz mr n, At pbnoq é uma matriz n r m onde bno aon. Matriz Quadrada: Matriz cujo número
de linhas é igual ao número de
colunas (m n); também chamada
de matriz de ordem n.
Matriz Identidade: Matriz quadrada
composta de uns na diagonal
principal (ano 1 se i j) e de zeros
nas demais posições (ano 0 se i ? j).
IM j10⋯001⋯0
⋯⋯…⋯00⋯1mM
O Delta de Kronecker, δno é uma
função definida por
δno y0sei ? j1sei j
Portanto, a Matriz Identidade pode
ser definida como I pδnoq. Matriz Diagonal: É um tipo especial
de matriz quadrada. A matriz é

71
www.teslaconcursos.com.br
diagonal se seus elementos que não
estão na diagonal principal forem
todos iguais a zero(ano 0 se i ? j).
Matriz Triangular Superior: Outro
tipo especial de matriz quadrada
cujos elementos abaixo da diagonal
principal são todos nulos (bno 0, se i z j); como abaixo:
B jb�� b�� b��0 b��0 0 b��b��m
Matriz Triangular Inferior: Similar à
Matriz Triangular Superior, a
triangular inferior possui os
elementos acima da diagonal
principal iguais a zero (bno 0 se i |j); como abaixo:
B ; b�� 0 0b�� b��b�� b�� 0b��<
Álgebra Matricial
Adição: Supondo A panoq e B pbnoq duas matrizes de iguais dimensões mr n; a soma A � B é a matriz mr n
obtida a partir da soma dos
elementos correspondentes das
matrizes A e B:
A � B } a�� � b��a�� � b��⋯al� � bl�
⋯⋯…⋯a�M � b�Ma�M � b�M⋯alM � blM
~
Propriedades:
A � B B � A; A � �B � C� �A � B� � C; A � 0 0 � A A; A � ��A� ��A� � A 0.
Multiplicação por Escalar: O produto
de uma matriz AlrM por um escalar k, kA, resulta em uma matriz mr n
cujos elementos são a multiplicação
de cada elemento de A por k.
kA }ka��ka��⋯kal�ka��ka��⋯kal�
⋯⋯…⋯ka�Mka�M⋯kalM
~
Propriedades:
k�A � B� kA � kB; �k� � k��A k�A � k�A; k��k�A� �k�k��A; 1 ∙ A A.
Multiplicação: Sendo A panoqlr� e
B pbnoq�rM matrizes em que o

72
www.teslaconcursos.com.br
número de colunas da primeira é
igual ao número de linhas da segunda,
o produto AB é uma matriz mr n
cujos elementos ij são obtidos
multiplicando a linha i pela coluna j, elemento a elemento, e somando os
resultados; como abaixo: AB 3cno4l�M com cno ∑ an����� b�o
Propriedades:
�"&�� "�&�� – Associativa; "�& � �� "& � "� – Distributiva; �" � &�� "� � &� – Distributiva; ��"&� ��"�& "��&� – Sendo k
um escalar; "d d" " – Sendo d uma matriz
identidade; 0" "0 0 – Sendo 0 uma matriz
nula.
Exemplo
Dadas as matrizes A `1 32 �1a e
B `2 0 �43 �2 6 a, encontre:
(a)AB
(b) &"
Solução (a): Como a matriz " tem o
mesmo número de colunas que o
número de linhas da matriz &, a
multiplicação é definida, e
"�r�&�r� ��r�.
`1 32 �1a r `2 0 �43 �2 6 a `��� ��� ������ ��� ���a
e
��� 1 ∗ 2 � 3 ∗ 3 11⋮
��� 2 ∗ ��4� � ��1� ∗ 6 �14
Portanto, � `11 �6 141 2 �14a
Solução (b): A multiplicação de &"
não é definida, já que o número de
colunas da primeira é diferente do
número de linhas da segunda.
Adição e Multiplicação de Matriz
Transposta
Propriedades:
�A � B�t At � Bt �At�t A �kA�t kAt �AB�t BtAt
Enfatiza-se no último que a
transposta do produto é o produto
das transpostas, porém na ordem
inversa.
73
www.teslaconcursos.com.br
Sistemas de Equações Lineares
Definição: Um sistema de equações
lineares é uma lista de m equações
lineares (L�, L�,…Ll) com as
mesmas n incógnitas x�, x�, … , xM e
podem ser escritas na forma padrão: Ax� B � a��x� � a��x� �⋯� a�MxM b�a��x� � a��x� �⋯� a�MxM b�⋮al�x� � al�x� �⋯� alMxM bl
Onde ano e bn são constantes. O
número ano é o coeficiente da
incógnita xo na equação Ln, e o
número bn é a constante da equação Ln. Características:
Se o número de equações for igual ao
número de incógnitas (m n), o
sistema é chamado quadrático.
Se todos os termos constantes forem
iguais a zero, bn 0, o sistema é
chamado homogêneo.
A relação de valores para as n
incógnitas do sistema que resolve
todas as equações desse sistema, é
chamada solução particular. Esta
relação de valores pode ser
representada por um vetor u� que
pertence à um conjunto KM de
soluções para o sistema, também
chamado solução geral.
Se o sistema de equações lineares
possuir uma ou mais soluções, ele é
chamado consistente.
Se o sistema de equações lineares não
possuir solução, ele é chamado
inconsistente.
Dois sistemas de equações lineares
que possuem as mesmas soluções,
são chamados equivalentes.
Formas Escalonadas:
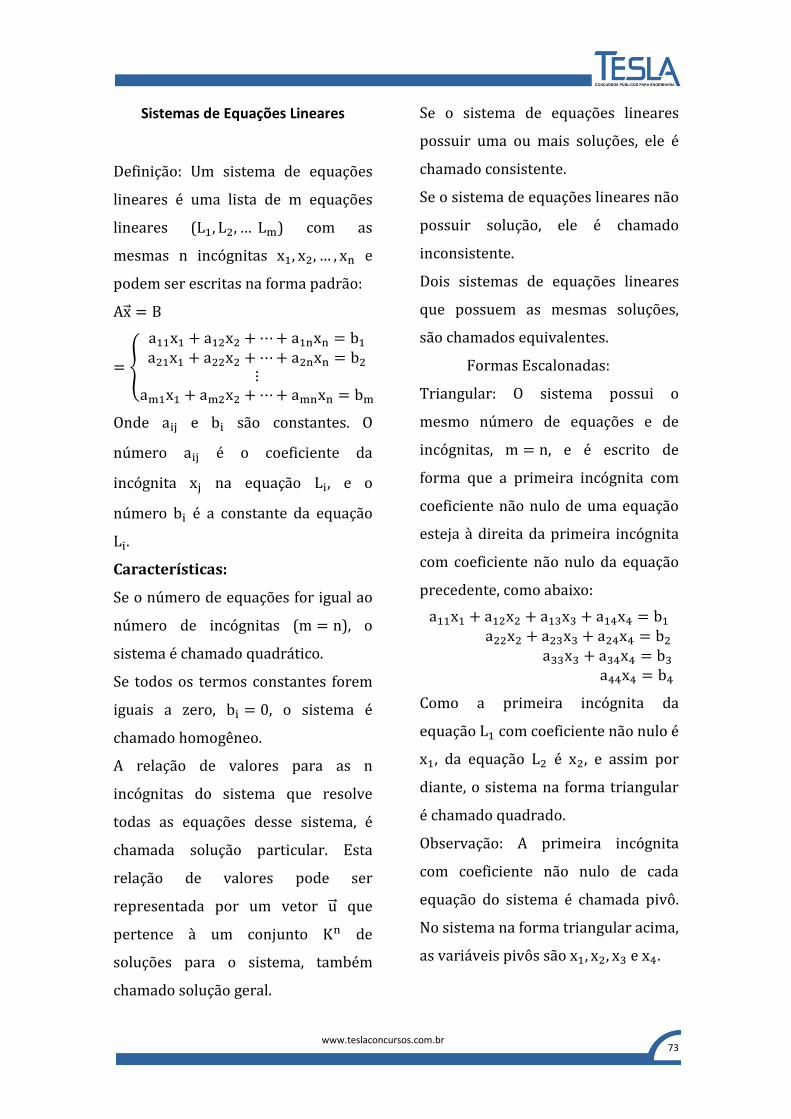
Triangular: O sistema possui o
mesmo número de equações e de
incógnitas, m n, e é escrito de
forma que a primeira incógnita com
coeficiente não nulo de uma equação
esteja à direita da primeira incógnita
com coeficiente não nulo da equação
precedente, como abaixo: a��x� � a��x� � a��x� � a��x� b� a��x� � a��x� � a��x� b� a��x� � a��x� b� a��x� b�
Como a primeira incógnita da
equação L� com coeficiente não nulo é x�, da equação L� é x�, e assim por
diante, o sistema na forma triangular
é chamado quadrado.
Observação: A primeira incógnita
com coeficiente não nulo de cada
equação do sistema é chamada pivô.
No sistema na forma triangular acima,
as variáveis pivôs são x�, x�, x�ex�.

74
www.teslaconcursos.com.br
Não Triangular: Assim como na forma
triangular, o sistema é escrito de
forma que o pivô de uma equação
esteja à direita do pivô da equação
precedente Porém, o sistema possui
menos equações do que incógnitas, m | n. Portanto, sua solução é dada
em função das n � m incógnitas que
não são pivôs.
Exemplo 10:
O sistema seguinte está na forma
escalonada não triangular: 2x� � 6x� � x� � 4x� � 2x� 15 x� � 2x� � 2x� 5 3x� � 9x� 6
As variáveis pivôs são x�, x�ex�.
A solução paramétrica do sistema é
dada atribuindo valores arbitrários à x� e x�, como a e b, respectivamente.
Fazendo as substituições:
É x� 4 � 3a � 9b x� 1 � 8b x� 2 � 3b
Assim, a solução geral é: s �4 � 3a � 9b, a, 1 � 8b, 2 � 3b, b�
Forma Matricial: O sistema Ax� B
pode ser representado de dois modos
matriciais:
Matriz de coeficientes:
A ja��a��⋯al�a��a��⋯al�
⋯⋯…⋯a�Ma�M⋯alM
m
Matriz aumentada:
M ja��a��⋯al�a��a��⋯al�
⋯⋯…⋯a�Ma�M⋯alM
b�b�…blm
Sendo
x� jx�x�⋯xMm, o vetor das incógnitas e
B }b�b�⋯bl~, a matriz das constantes.
Análise das soluções:
Se todos os coeficientes de uma
equação Ll do sistema linear forem
iguais a zero, al�, al�, … alM 0, o
sistema pode ser:
Possível e indeterminado: Se �1 0,
qualquer vetor em �� pode ser a
solução da equação �1, a qual pode
ser excluída do sistema sem que seu
conjunto solução seja alterado.
Impossível: Se � ? 0, o sistema não
tem solução.

75
www.teslaconcursos.com.br
Se em todas as equações do sistema,
um ou mais coeficientes forem
diferentes de zero, o sistema é:
Possível e determinado.
Sendo um sistema linear de n
incógnitas, e sendo M 3A, B4 a
matriz aumentada do sistema:
O sistema tem solução se e apenas se
o posto de " for igual ao posto de �.
A solução é única se e apenas se o
posto de " for igual ao posto de �,
que devem ser iguais à A.
O sistema tem infinitas soluções se A | postode" postode�.
Observação: O posto da matriz A é
igual ao número de pivôs da forma
escalonada de A Como será estudado
no capítulo Dependência e
Independência Linear da Aula 4, o
posto é também o número de linhas
linearmente independentes, ou ainda,
o número de linhas não nulas de um
sistema linear escrito na forma
escalonada.
Exemplo
Verifique se os vetores são soluções
da equação x� � 4x� � 3x� � 2x� 11.
(a)u� �3,1,2,5� (b) v� �1,3,2,4�
Solução(a):
3 � 4�1� � 3�2� � 2�5� 11 �� é solução da equação.
Solução(b): 1 � 4�3� � 3�2� � 2�4� 15 � não é solução da equação.
Exemplo
Considere o sistema y x � ay 4ax � 9y b e
determine:
(a) Os valores de a para que o sistema
tenha uma única solução.
(b) Os valores �a, b� para que o
sistema tenha mais de uma solução.
Solução (a): Somando as equações
equivalentes, temos:

76
www.teslaconcursos.com.br
y �� � ��� 4���� � 9� �� ��� � 9�� 4� � �
O sistema tem uma única solução se ��� � 9� ? 0, ou se � ? �3.
Solução (b): O sistema tem mais de
uma solução se ��� � 9� 0 e 4� � � 0.
Para � 3, � 12. Para � �3, � �12.
Portanto, para os pares ��, �� �3,12� e ��, �� ��3,�12�, o sistema
tem mais de uma solução.
Eliminação Gaussiana
Definição: É um método para resolver
sistemas de equações lineares. Ao
aplicar a Eliminação Gaussiana, ou
reduz-se o sistema à forma
escalonada ou triangular, levando-o à
sua forma equivalente de mais fácil
resolução, ou é encontrada uma
equação com todos os coeficientes
nulos exceto b, levando à verificação
de que o sistema não tem solução.
Etapas: As etapas da Eliminação
Gaussiana serão mostradas no
exemplo a seguir.
Exemplo
Aplique a eliminação Gaussiana para
resolver o sistema: 2x � 3y � 2z 6 �L1�2x � 4y � 3z 8 �L2��6x � 6y � 8z �9 �L3� Solução: O primeiro passo é eliminar x de L2 e L3. Para isso, usa-se o
coeficiente 2 de x em L1 como pivô e
aplica-se as substituições, L2 �L1 � L2 e L3 3L1 � L3,
obtendo 2x � 3y � 2z 6 �L1� �y � z 2 �L2� �3y � 2z 9 �L3�
O segundo passo é eliminar y de L3
do novo sistema. Para isso, usa-se o
coeficiente �1 de y em L2 como pivô
e aplica-se a substituição, L3 �3L2 � L3, obtendo 2x � 3y � 2z 6 �L1� �y � z 2 �L2� 5z 3 �L3�
E esta é a forma equivalente
simplificada do sistema, que possui 1
solução definida.
Determinantes
Determinante é uma função matricial
que associa a cada matriz quadrada
um escalar. Esta função permite saber
77
www.teslaconcursos.com.br
se a matriz tem ou não inversa, pois
as que não têm são precisamente
aquelas cujo determinante é igual a 0.
Propriedades:
1) O determinante também é uma
função n-linear e alternada nas
colunas da matriz;
2) O determinante de uma matriz é
igual ao determinante da sua
transposta: det(A) = det(AT);
3) Se uma fila (linha ou coluna) da
matriz é composta de zeros, então o
determinante desta matriz será zero;
4) Se escrevermos cada elemento de
uma linha ou coluna de A como soma
de duas parcelas então det(A) é a
soma de dois determinantes de
ordem n cada um considerando como
elemento daquela linha ou coluna
uma das parcelas, e repetindo as
demais linhas ou colunas;
5) Se uma matriz é triangular
(superior ou inferior) o seu
determinante é o produto dos
elementos da diagonal principal;
6) Multiplicando uma fila (linha ou
coluna) de uma matriz A por um
escalar λ ∈ K, então o determinante
da nova matriz é igual ao
determinante de A multiplicado por λ;
7) Se permutarmos duas linhas ou
colunas de A então o determinante da
nova matriz é −det(A);
8) Se A tem duas linhas (ou colunas)
iguais, então det(A) = 0;
9) Se somarmos a uma linha (ou
coluna) de A um múltiplo de outra
linha (ou coluna), o determinante da
nova matriz é igual ao de A;
10) Se A e B são matriz quadradas da
mesma ordem, então det(AB) =
det(A).det(B);
11) Se A é invertível, então
det(A−1) = 1⁄det(A), de onde resulta
que se A é invertível então det(A) ≠ 0;
12) Se A é ortogonal, então det(A) =
±1.
Determinante de ordem 1: é o próprio
número que gera a matriz.
Determinante de ordem 2: é a
diferença entre o produto dos termos
da diagonal principal e o produto dos
termos da diagonal secundária. Esses
produtos se chamam,
respectivamente, termo principal e
termo secundário da matriz.
��� �� �� �� �� � ��

78
www.teslaconcursos.com.br
Determinante de ordem 3, ou regra
de Sarrus:
��� �� � �� � �� � �� ���� � ��� � ����� ���� � ��� � ����
Determinante de ordem n
A fórmula de Leibniz para
determinante de uma matriz A, n por
n é
det�"� �>¡��1�>¢¡. ���"¤>,¤¡�¡��
Regra de Cramer.
A regra de Cramer é um teorema em
álgebra linear, que dá a solução de um
sistema de equações lineares em
termos de determinantes. Recebe este
nome em homenagem a Gabriel
Cramer (1704 - 1752).
�� � �� � �� � �� �
que em forma matricial é:
`� �� �a `��a `��a
x e y podem ser resultados usando a
regra de Cramer:
� ¥� �� �¦`� �� �a �� � ���� � ��
� `� �� �a`� �� �a �� � ���� � ��
Caiu no Concurso!
1-(PETROBRAS - Eng. E. Jr – T. e D.)
– 2011
Sejam u� �1,2�, v� �m,�4� e w��� �3, n� vetores de ��. Se w��� 2u� � v�, então
a)m� n 0
b)m� n �4
c)m 3n
d)m. n �8
e) m. n 1

79
www.teslaconcursos.com.br
2-(PETROBRAS - Eng. Petróleo Jr) –
2011
Considere v����̈ �1, �1,1,0�, v���� �3,0,1,1�, v���� �2,1,0,1� vetores
no espaço �� e seja V o subespaço de �� gerado por esses 3 vetores. Nesse
caso, a dimensão de V é igual a
a)0.
b)1.
c)2.
d)3.
e) 4.
3- (PETROBRAS - Eng. Petróleo Jr) -
2011
Uma base para o espaço-solução do
sistema homogêneo de duas equações
lineares a 4 incógnitas é
y2x � 2y � z � w 0x � y � z � w 0
a)ª��1,1,0,0�, �� �� , 0, �� , 1�«
b)¬��1,1,0,0�, �� �� , 0, �� , 1� ,�� �� , 1, �� , 1�
c)+��1,1,0,0�, d)y�1,0,0,0�, �0,1,0,0�, �0,0,1,0�,�0,0,0,1� ® e) +�0,0,0,0�,
4-(PETROBRAS - Eng. Petróleo Jr) -
2011
Considere o subespaço V ¬�x, y, z, w� ∈��: �1 2 1 33 6 3 91 2 1 3�¯
xyzw° �000�.
Neste caso, a dimensão de V é igual a
a)0.
b)1.
c)2.
d)3.
e) 4.
80
www.teslaconcursos.com.br
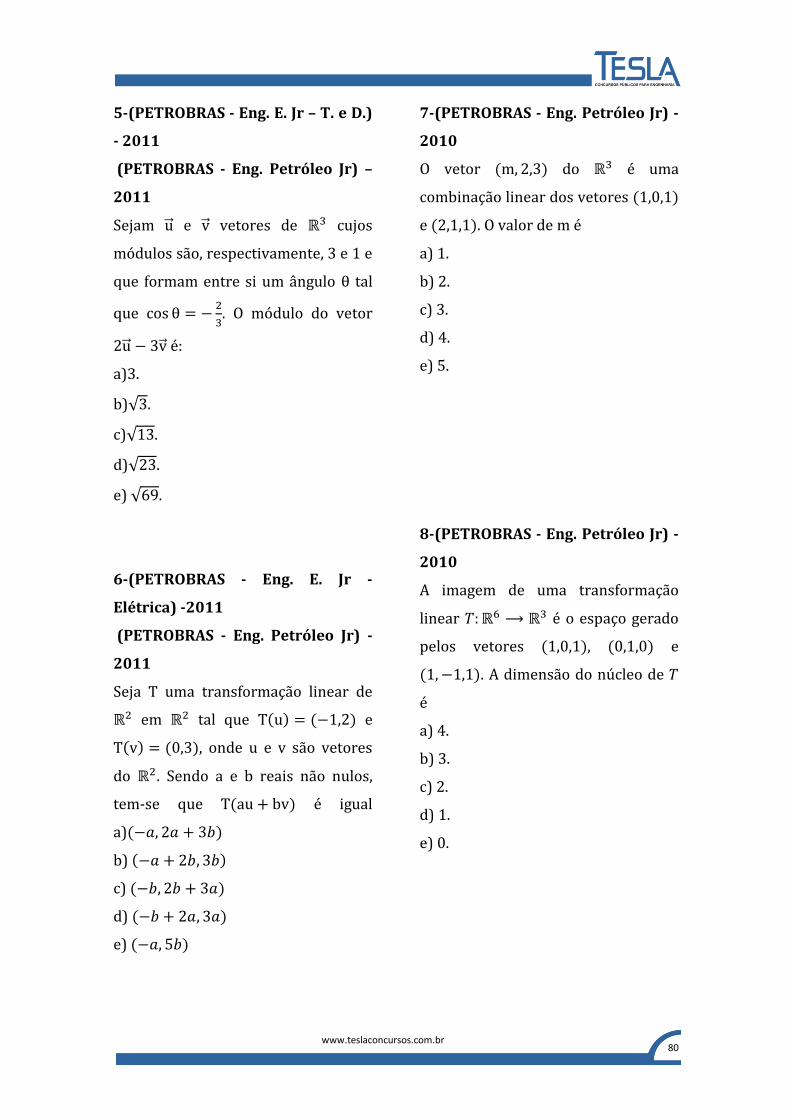
5-(PETROBRAS - Eng. E. Jr – T. e D.)
- 2011
(PETROBRAS - Eng. Petróleo Jr) –
2011
Sejam u� e v� vetores de �� cujos
módulos são, respectivamente, 3 e 1 e
que formam entre si um ângulo θ tal
que cos θ � ��. O módulo do vetor 2u� � 3v� é:
a)3.
b)√3.
c)√13.
d)√23.
e) √69.
6-(PETROBRAS - Eng. E. Jr -
Elétrica) -2011
(PETROBRAS - Eng. Petróleo Jr) -
2011
Seja T uma transformação linear de �� em �� tal que T�u� ��1,2� e T�v� �0,3�, onde u e v são vetores
do ��. Sendo a e b reais não nulos,
tem-se que T�au � bv� é igual
a)���, 2� � 3�� b) ��� � 2�, 3�� c) ���, 2� � 3�� d) ��� � 2�, 3�� e) ���, 5��
7-(PETROBRAS - Eng. Petróleo Jr) -
2010
O vetor �m, 2,3� do �� é uma
combinação linear dos vetores �1,0,1� e �2,1,1�. O valor de m é
a) 1.
b) 2.
c) 3.
d) 4.
e) 5.
8-(PETROBRAS - Eng. Petróleo Jr) -
2010
A imagem de uma transformação
linear [:�³ ⟶�� é o espaço gerado
pelos vetores �1,0,1�, �0,1,0� e �1, �1,1�. A dimensão do núcleo de [
é
a) 4.
b) 3.
c) 2.
d) 1.
e) 0.

81
www.teslaconcursos.com.br
9-(PETROBRAS - Eng. Petróleo Jr) -
2011
Considere a transformação linear T:�� ⟶�� tal que T�1,0� ��1,1� e T�0,1� �3,2�. Sendo λ� e λ� os
autovalores de T, λ�eλ� reais e λ�>λ�,
tem-se que
a) λ�+λ� �1
b) λ�+λ� �5
c) λ� � λ� √21
d) λ�λ� 5
e) µ¶µ· 11 � √21
10-(PETROBRAS - Eng. Petróleo Jr)
- 2011-62C
É correto afirmar que a matriz
A ��1 0 0�2 �4 00 0 1�
a) Não é diagonalizável
b) Possui apenas um autovalor real
c) Possui 3 autovalores reais distintos
d) Possui 2 autovalores reais
distintos
e) Não possui autovalores reais
11-(PETROBRAS - Eng. Petróleo Jr)
- 2011
Considere a equação matricial AX B. Se A ` 1 2�1 �1a, B `3 �21 4 a, então a matriz X é
a) `2 �42 5 a b) `�5 �64 2 a c) ` 3 �1�1 �4a d) `�5 �83 2 a e) `4 00 3a
12-(PETROBRAS - Eng. E. Jr - T. e
D.) - 2011
Dentre os métodos diretos utilizados
para a resolução de sistemas de
equações lineares, estão os de
a) Eliminação de Gauss e de Gauss-
Jordan.
b) Eliminação de Gauss e de
Gauss-Jacobi.
c) Decomposição LU e de Gauss-
Seidel.
d) Gauss-Seidel e de Gauss-Jordan.
82
www.teslaconcursos.com.br
13-(PETROBRAS - Eng. E. Jr -
Elétrica) - 2011
(PETROBRAS - Eng. Petróleo Jr) -
2011
Com relação ao sistema de variáveis
xey, ymx � y 3x � y n , no qual men são
números reais, tem-se que
a) Se m �1en �3, qualquer
par ordenado �x, y�, xey reais, é
solução.
b) Não tem solução se m �1en ? �3.
c) Tem sempre solução quaisquer
que sejam men reais.
d) Tem duas soluções se m ? �1.
e) �1,1� é solução se m n.
14-(PETROBRAS - Eng. Petróleo Jr)
- 2010
Considere os vetores �� ��� , ��� e
� ��� , � ���. Sobre esses vetores tem-
se que
a) São ortogonais
b) São ambos unitários
c) Têm a mesma direção
d) Formam ângulo obtuso
e) Apenas o vetor �� é unitário
15-(PETROBRAS - Eng. Petróleo Jr)
- 2010
Seja ¹ o subespaço vetorial de ��
formado por todos os ternos ��, �, �� que são soluções do sistema linear
y2� � � � 3� 0� � � � 2� 0
Considere as seguintes afirmativas
relativas a ¹:
I – ¹ é o espaço gerado pelos vetores �2,1,3� e �1, �1,2�; II – todos os vetores em ¹ são
ortogonais ao vetor �2,1,3�; III – ¹ tem dimensão 0.
Está correto APENAS o que afirma em
a) I.
b) II.
c) III.
d) I e II.
e) II e III.
83
www.teslaconcursos.com.br
16-(PETROBRAS - Eng. Petróleo Jr)
- 2010
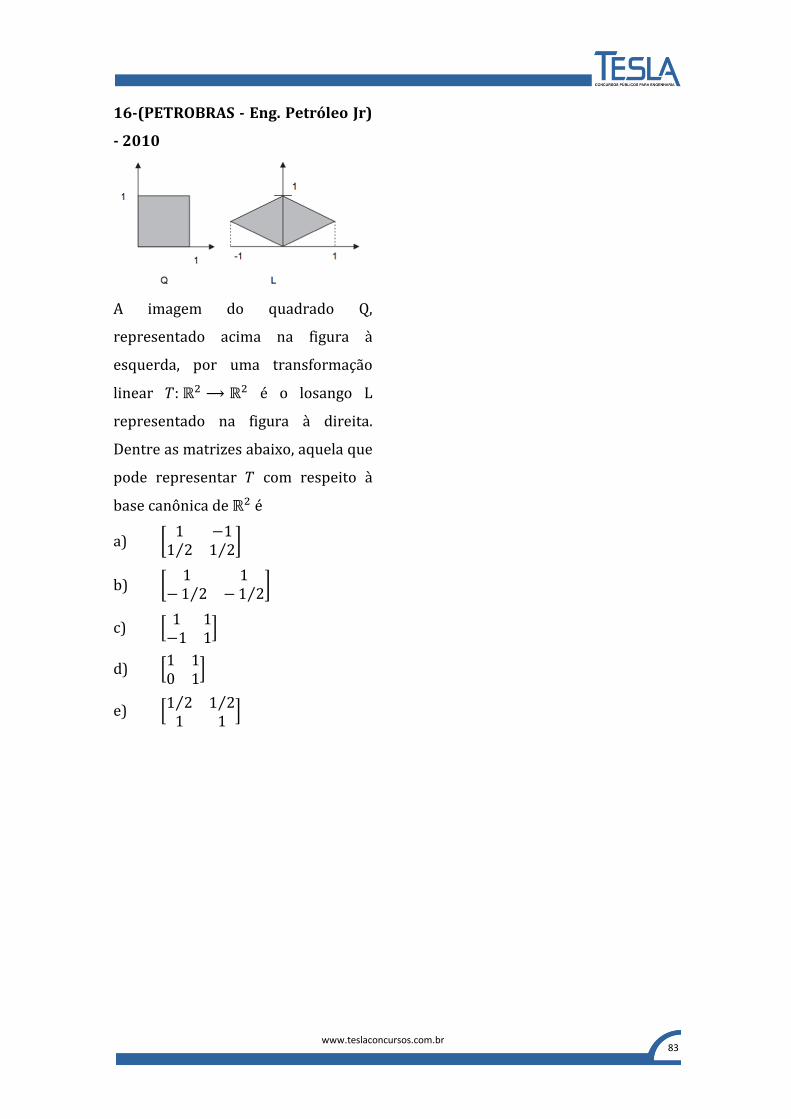
A imagem do quadrado Q,
representado acima na figura à
esquerda, por uma transformação
linear [:�� ⟶�� é o losango L
representado na figura à direita.
Dentre as matrizes abaixo, aquela que
pode representar [ com respeito à
base canônica de �� é
a) ¥ 1 �11 2⁄ 1 2⁄ ¦ b) ¥ 1 1�1 2⁄ �1 2⁄ ¦ c) ` 1 1�1 1a d) `1 10 1a e) `1 2⁄ 1 2⁄1 1 a
84
www.teslaconcursos.com.br
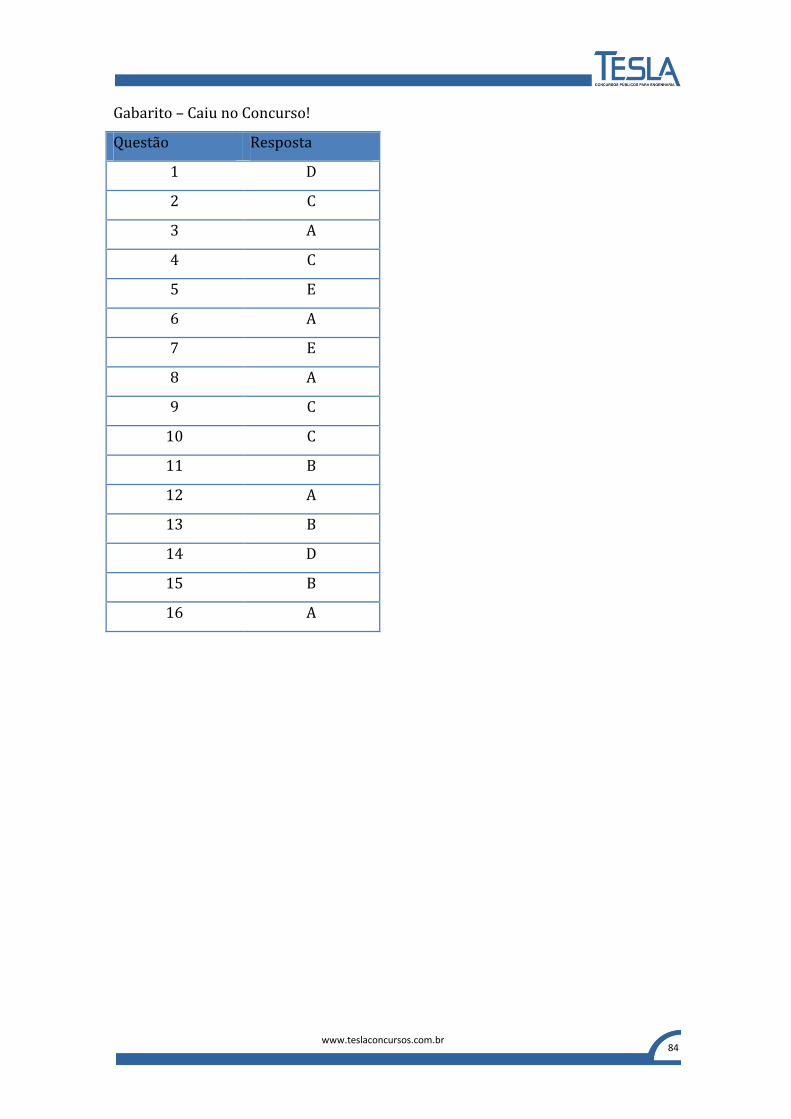
Gabarito – Caiu no Concurso!
Questão Resposta
1 D
2 C
3 A
4 C
5 E
6 A
7 E
8 A
9 C
10 C
11 B
12 A
13 B
14 D
15 B
16 A





























