Embed Size (px)
DESCRIPTION
aktuator
Citation preview
pengertian aktuator
Aktuator adalah elemen yang mengkonversikan besaran listrik analog menjadi besaran lainnya misalnya kecepatan putaran dan merupakan perangkat elektromekanik yang menghasilkan daya gerakan sehingga dapat menghasilkan gerakan pada robot. Untuk meningkatkan tenaga mekanik aktuator dapat dipasang sistem gearbox.
Aktuator merupakan bagian keluaran untuk mengubah energi suplai menjadi energi kerja yang dimanfaatkan. Sinyal keluaran dikontrol oleh sistem kontrol dan aktuator bertanggung jawab pada sinyal kontrol melalui elemen kontrol terakhir. Jenis lain dari bagian keluara digunakan untuk mengindikasi status kontrol sistem atau aktuator.
Aktuator dapat melakukan hal tertentu setelah mendapat perintah dari kontroler.Misalnya pada suatu robot pencari cahaya, maka jika terdapat cahaya sensor akan memberikan informasi kepada kontroler yang kemudian akan memerintahkan kepada aktuator untuk bergerak mendekati arah cahaya.
Aktuator adalah peranti yang menghasilkan gerakan pada robot. Motor listrik, pneumatika, dan hidrolika adalah contoh dari aktuator. Selain output gerakan, pada suatu robot sering kali diperlukan output dalam bentuk lain, misalnya display untuk menampilkan keadaan sensor ataupun aktuator. Display dapat berupa LED, seven segment, ataupun LCD.Kontroler adalah peranti yang berfungsi untuk mengolah informasi yang diberikan sensor dan kemudian memberikan perintah kepada aktuator untuk melakukan hal tertentu. Misalnya pada suatu robot pencari cahaya, maka jika terdapat cahaya sensor akan memberikan informasi kepada kontroler yang kemudian akan memerintahkan kepada aktuator untuk bergerak mendekati arah cahaya.
Kebanyakan kontroler yang digunakan pada robot adalah peranti digital yang dapat diprogram (atau secara umum disebut komputer) karena alasan fleksibilitas. Banyak peranti yang dapat dijadikan kontroler robot, seperti PC, mikrokontroler, PLC serta kontroler digital lainnya (misal FPGA), namun yang paling banyak dipakai (terutama untuk mobile robot) adalah mikrokontroler.
Berikut berbagai jenis aktuator sesuai dengan prinsip kerjanya yaitu:
- Aktuator listrik : Aktuator tenaga elektris, biasanya digunakan selenoid, motor arus searah (mesin DC). Sifat mudah diatur dengan torsi kecil sampai sedang.
- Aktuator hidraulik : Aktuator tenaga hidraulik, torsi yang besar konstruksinya sukar
- Aktuator pneumatik : Aktuator tenaga pneumatik, sukar dikendalikan
Aktuator terdiri dari 3 jenis pokok :
Relai adalah alat yang dioperasikan dengan listrik dan secara mekanis mengontrol penghubungan rangkaian listrik, bermanfaat untuk kontrol jarak jauh dan untuk pengontrolan alat tegangan dan arus tinggi dengan sinyal kontrol tegangan dan arus rendah. Bekerja berdasarkan pembentukan elektromagnet yang menggerakkan elektromekanis penghubung dari dua atau lebih titik penghubung (konektor) rangkaian sehingga dapat menghasilkan kondisi kontak ON atau kontak OFF atau kombinasi dari keduanya.
Gambar 1. Relay
Selenoid adalah alat yang digunakan untuk mengubah sinyal listrik atau arus listrik menjadi gerakan mekanis linear. Terbentuk dari kumparan dengan inti besi yang dapat bergerak, besarnya gaya tarikan atau dorongan yang dihasilkan adalah ditentukan dengan jumlah lilitan kumparan tembaga dan besar arus yang mengalir melalui kumparan.
Gambar 2. Selenoid

Stepper adalah alat yang mengubah pulsa listrik yang diberikan menjadi gerakan rotor discret (berlainan) yang disebut step (langkah). Satu putaran motor memerlukan 360 derajat dengan jumlah langkah yang tertentu perderajatnya. Ukuran kerja dari stepper biasanya diberikan dalam jumlah langkah per-putaran per-detik. Motor stepper mempunyai kecepatan dan torsi yang rendah namun memiliki kontrol gerakan posisi yang cermat, hal ini dikarenakan memiliki beberapa segment kutub kumparan.
Gambar 3. Stepper Motor
Motor DC adalah alat yang mengubah pulsa listrik menjadi gerak, mempunyai prinsip dasar yang sama dengan motor stepper namun gerakannya bersifat kontinyu atau berkelanjutan. Motor DC dibagi menjadi 2 jenis yaitu ; Motor DC dengan sikat (mekanis komutasi), yaitu motor yang memiliki sikat karbon berfungsi sebagai pengubah arus pada kumparan sedemikian rupa sehingga arah tenaga putaran motor akan selalu sama. Motor DC tanpa sikat , menggunakan semi konduktor untuk merubah maupun membalik arus sehingga layaknya pulsa yang menggerakkan motor tersebut. Biasa digunakan pada sistem servo, karena mempunyai efisiensi tinggi, umur pemakaian lama, tingkat kebisingan suara listrik rendah, karena putarannya halus seperti stepper namun putarannya terusmenerus tanpa adanya step. + Rano (Sumber: Buku Elektronik Industri, Frank D. Petruzella)
Actuator terbagi menjadi 2 jenis. Ada jenis yang bergerak berdasarkan rotasi atau putaran. Ada juga actuator linear yang bergerak lurus.
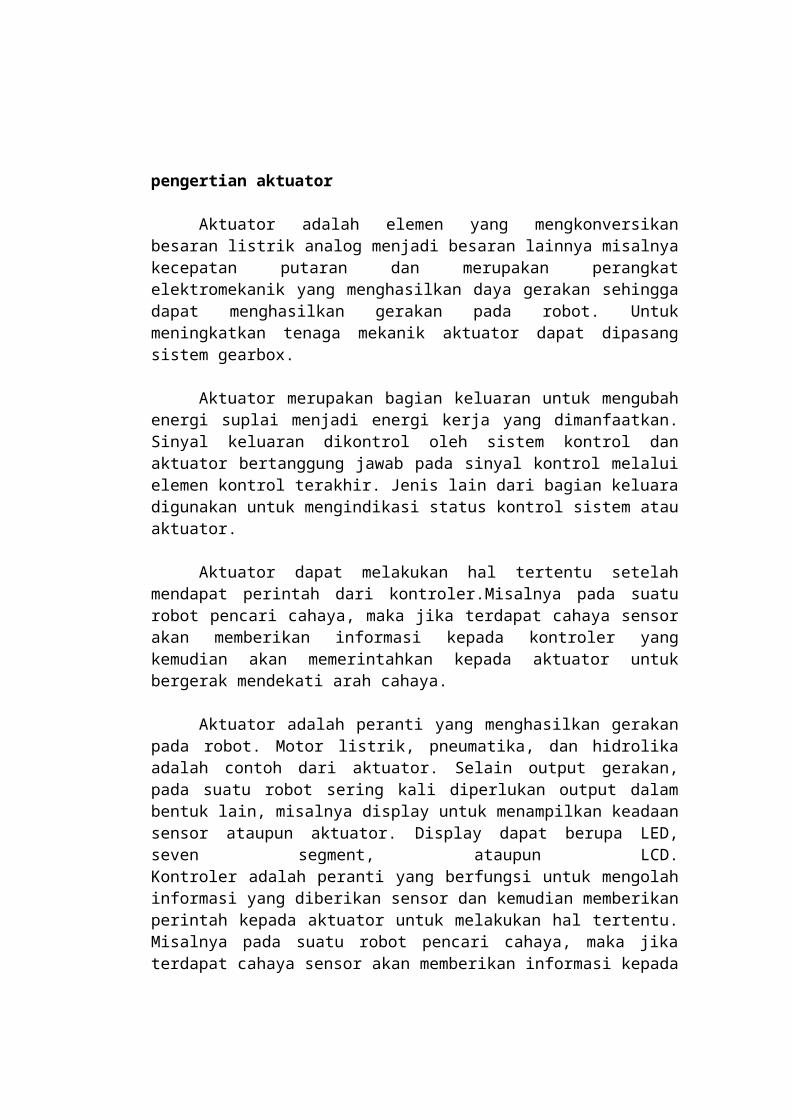
1. Motor DC.

Motor DC adalah jenis penggerak yang menggunakan arus searah (DC) sebagai tenaganya. Arus searah ini nantinya akan dimanfaatkan oleh kumparan yang ada didalamnya dan menjadi energi mekanik. Kumparan itu disebut stator (bagian yang tidak berputar), dan bagian yang berputar disebut rotor.
Gambar 4. Motor DC
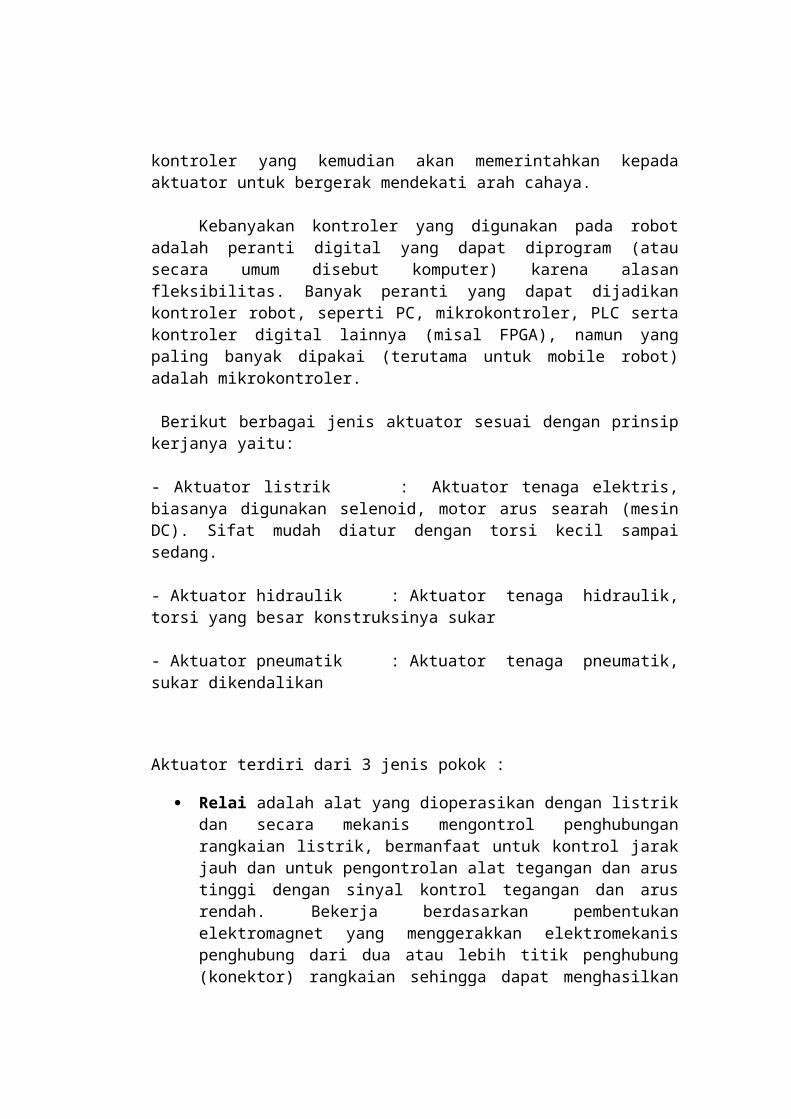
2. Geared Motor DC.Geared Motor DC Ini adalah pengembangan dari DC Motor, yang membedakan adalah dengan adanya penambahan komponen Gear pada Motor. Gear ini berfungsi untuk menambah torsi (tenaga) pada motor, atau juga bisa menambah kecepatan.
Gambar 5. Geared Motor DC
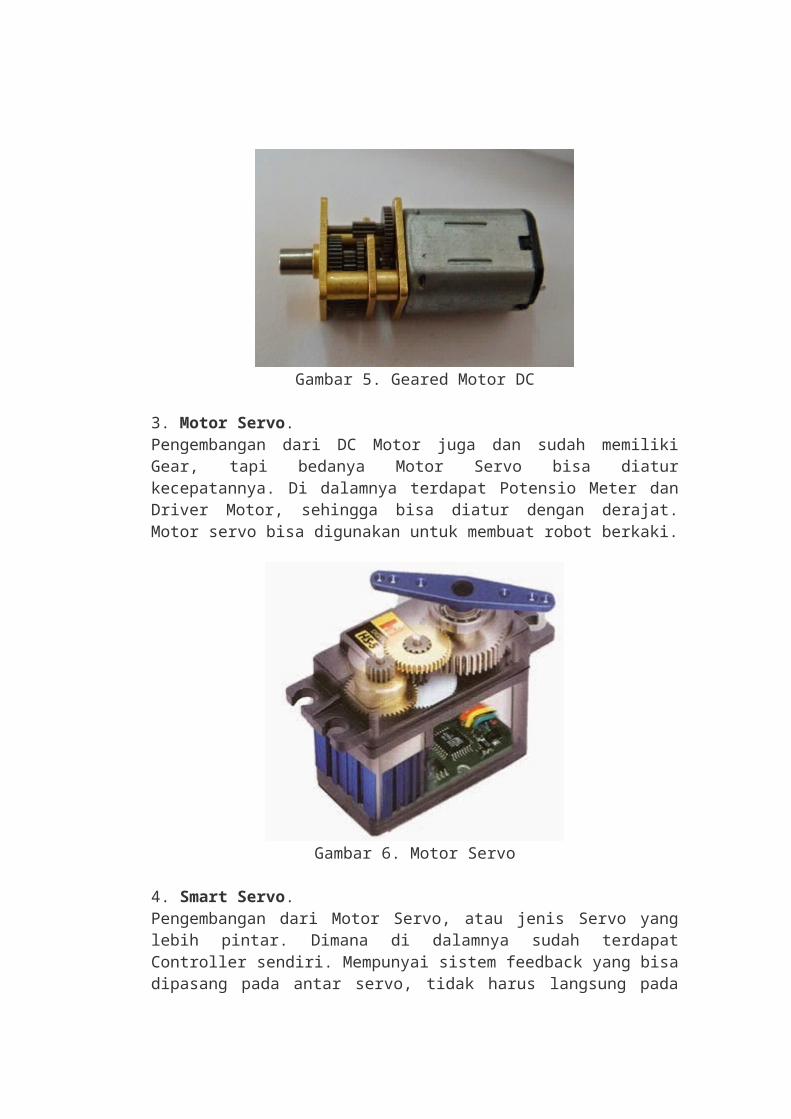
3. Motor Servo. Pengembangan dari DC Motor juga dan sudah memiliki Gear, tapi bedanya Motor Servo bisa diatur kecepatannya. Di dalamnya terdapat Potensio Meter dan Driver Motor, sehingga bisa diatur dengan derajat. Motor servo bisa digunakan untuk membuat robot berkaki.
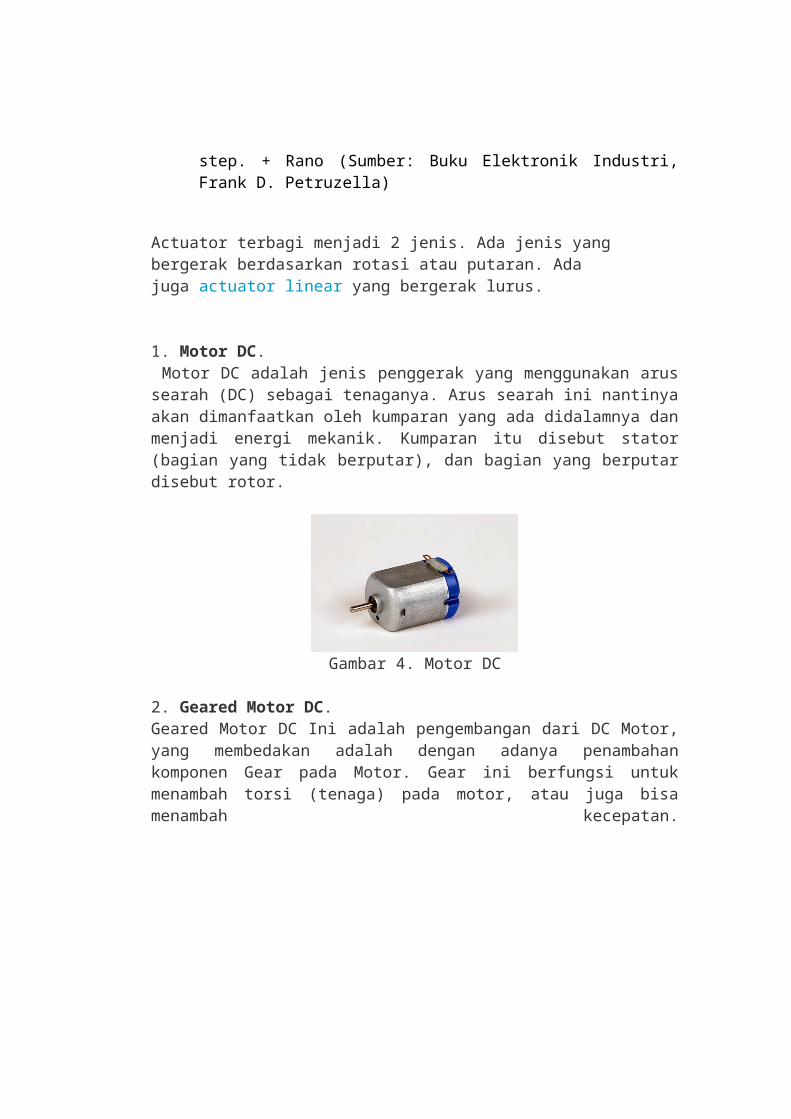
Gambar 6. Motor Servo
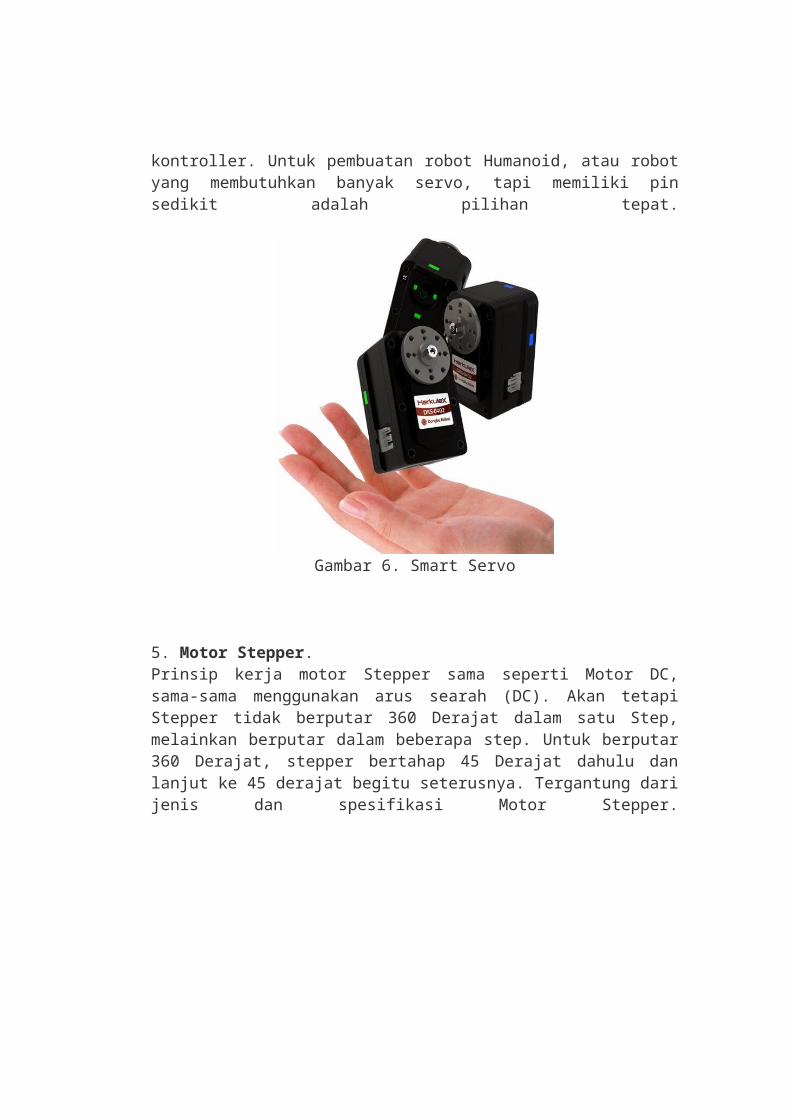
4. Smart Servo. Pengembangan dari Motor Servo, atau jenis Servo yang lebih pintar. Dimana di dalamnya sudah terdapat Controller sendiri. Mempunyai sistem feedback yang bisa dipasang pada antar servo, tidak harus langsung pada kontroller. Untuk pembuatan robot Humanoid, atau robot yang membutuhkan banyak servo, tapi memiliki pin sedikit adalah pilihan tepat.
Gambar 6. Smart Servo
5. Motor Stepper. Prinsip kerja motor Stepper sama seperti Motor DC, sama-sama menggunakan arus searah (DC). Akan tetapi Stepper tidak berputar 360 Derajat dalam satu Step, melainkan berputar dalam beberapa step. Untuk berputar 360 Derajat, stepper bertahap 45 Derajat dahulu dan lanjut ke 45 derajat begitu seterusnya. Tergantung dari jenis dan spesifikasi Motor Stepper.
Gambar 7. Motor Stepper
6. Geared Motor Stepper. Pengembangan dari Motor Stepper yang ada penambahan Gear pada motornya. Gear berfungsi untuk menambah torsi atau tenaga pada motor.
Gambar 8. Geared Motor Stepper
Yang bergerak berdasarkan linear ada:
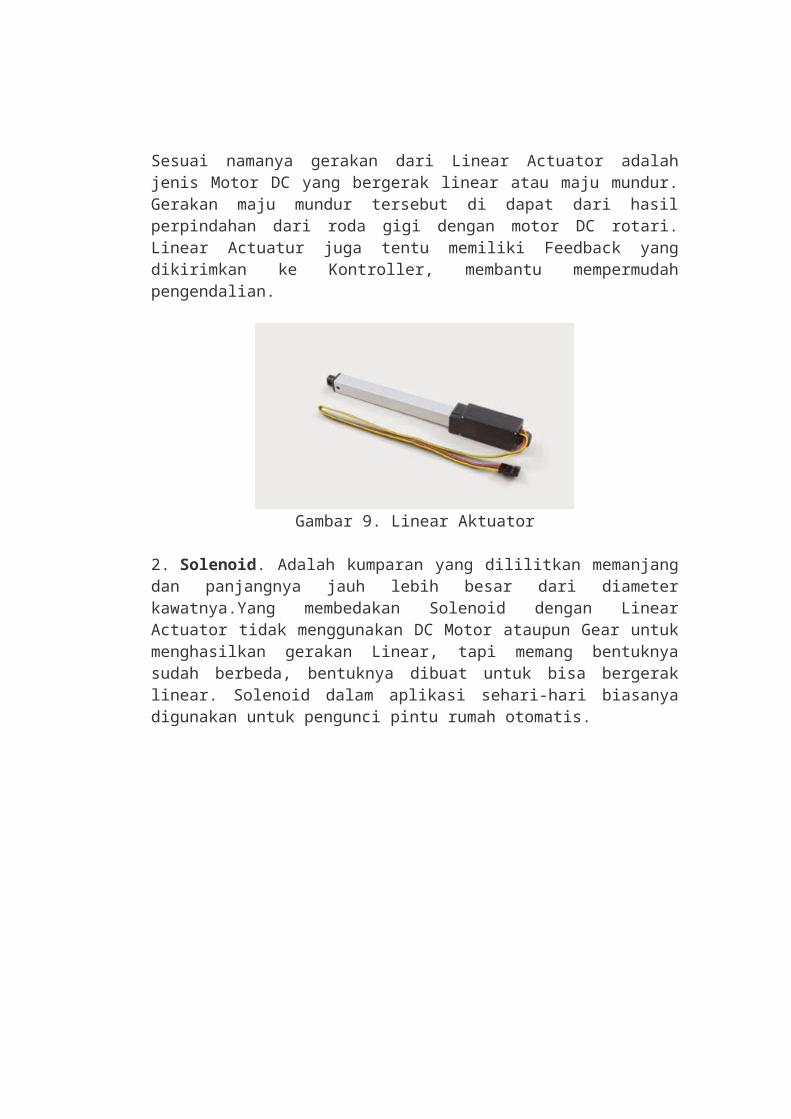
1. Linear Actuator. Sesuai namanya gerakan dari Linear Actuator adalah jenis Motor DC yang bergerak linear atau maju mundur. Gerakan maju mundur tersebut di dapat dari hasil perpindahan dari roda gigi dengan motor DC rotari. Linear Actuatur juga tentu memiliki Feedback yang dikirimkan ke Kontroller, membantu mempermudah pengendalian.
Gambar 9. Linear Aktuator
2. Solenoid. Adalah kumparan yang dililitkan memanjang dan panjangnya jauh lebih besar dari diameter kawatnya.Yang membedakan Solenoid dengan Linear Actuator tidak menggunakan DC Motor ataupun Gear untuk menghasilkan gerakan Linear, tapi memang bentuknya sudah berbeda, bentuknya dibuat untuk bisa bergerak linear. Solenoid dalam aplikasi sehari-hari biasanya digunakan untuk pengunci pintu rumah otomatis.
Gambar 10. Selenoid

3. Muscle Wire. Adalah kawat otot yang biasa digunakan pada tangan robot. Fungsinya adalah menggerakan jari-jari tangan robot.
Gambar 11. Muscle Wire
4. Pneumatic. Adalah jenis actuator yang memanfaatkan tekanan udara untuk menghasilkan gerakan mekanik linear. Untuk aplikasinya pneumatic digunakan untuk pekerjaan yang ringan, seperti pada pintu Bus.
Gambar 12. Pneumatic Actuator
5. Hydraulic. Merupakan jenis actuator yang mirip dengan Pneumatic, hanya saja hidraulic menggunakan Fluida atau oil yang dimanfaatkan untuk menghasilkan gerakan mekaniknya. Dan untuk aplikasinya juga Pneumatic biasa digunakan untuk pekerjaan berat pada industri.
Gambar 13. Hidraulic Actuator
Kelebihan
² Fluida hidrolik bisa sebagai pelumas dan pendingin.
² Dengan ukuran kecil dapat menghasilkan gaya/torsi besar
² Mempunyai kecepatan tanggapan yang tinggi
² Dapat dioperasikan pada keadaan yang terputus-putus
² Kebocoran rendah
² Fleksibel dalam desain
Kekurangan
² Daya hidrolika tidak siap tersedia dibanding dengan daya listrik
² Biaya sistem lebih mahal
² Bahaya api dan ledakan ada
² Sistem cenderung kotor
² Mempunyai karakteristik redaman yang rendah





























