Embed Size (px)
DESCRIPTION
Sesión03-Dinámica
Citation preview

SEMESTRE ACADÉMICO 2015-II
Nuestra misión como Universidad es
formar integralmente personas como
agentes de cambio, comprometidas con el
desarrollo sostenible a través de la
investigación, propuestas educativas
innovadoras y altos estándares de calidad.
Nuestra visión es ser una Universidad
reconocida por su alta calidad académica,
comprometida con la investigación, el
desarrollo sostenible y acreditada
internacionalmente.
DINAMICA
MOVIMIENTO
CURVILINEO
GENERAL
1
SESION 3 Ing. Betty Madueño Huaruco

• Movimiento de una recta.
Objetivos
• Aceleración tangencial y normal
• Movimiento circular
• Movimiento parabólico

• Supongamos un segmento de recta AB
que se mueve en el espacio desde AB
hasta AB’ en un tiempo t:
MOVIMIENTO DE UNA RECTA
A B
t
B’
P

• Considerando que la partícula posee una velocidad
angular inicial 0, la cual varía hasta una cantidad final
f , en un tiempo
t, entonces se define: B’
t
P
f
• Para el punto P:
A
0 B

• Para el movimiento curvilíneo:
• Como:

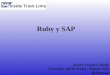
ACELERACIÓN TANGENCIAL Y
NORMAL
• Consideremos el movimiento de una
partícula describiendo un movimiento
curvilíneo: y C
A’
v
A
d
ρ
en eT
i
j
x
a T
aN
a
En A la partícula posee un velocidad v y una
aceleración a, la cual puede ser descompuesta en
una componente tangencial y otra perpendicular al
movimiento.
Desde A hasta A’ barrió un ángulo d, cuyo radio
de curvatura es , siendo su centro de curvatura
C

• La velocidad puede ser expresada como:

eT eN


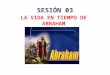
MOVIMIENTO CIRCULAR
• Consideremos una partícula moviéndose
alrededor de un círculo.
R
ω z
δ r
y
x

O
A
S
C
θ
v Período (T): Tiempo requerido para completar
una vuelta o ciclo.
Frecuencia (f): Número de ciclos por unidad de tiempo.
Se mide en seg-1 ó Hertz.
Para una revolución completa (2π): t=T,
θ= 2π entonces:
Para la aceleración
tangencial

Para el movimiento circular
uniforme:
Puesto que:

VELOCIDAD RADIAL Y
TRANSVERSAL
Vr
V
Vθ
r
A
y
uθ ur
θ θ
x


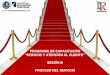
MOVIMIENTO PARABÓLICO
v vy
vy v
vx
v0
Y
vx hmá
x
v0x
v0y θ
X
Eje x: MRU (v=cte)
Eje y: MRUV



Bibliografía Consultada
• HIBBELER, Russell. (2010). Ingeniería Mecánica: DINAMICA
(12° edición). México: Prentice Hall
• BEER F; Jhonston R. (2006). Mecánica vectorial para
ingenieros: DINAMICA (8ª ed.). México: McGraw Hill
• SINGER, F. (2002). Mecánica para ingenieros. México:
Editorial Harla / Thomson, W. (2004). Teoría de
Vibraciones (3ª edición). México: Prentice Hall
• LLANOS M (2010). Resistencia de materiales. Lima.
Editorial SAN MARCOS
18