I Bazele aritmetice ale graficii 2D
Capitolul II. Transformri geometrice
2.1 Transformri geometrice plane
2.1.1 Transformarea de vizualizare
Reprezentarea grafic a obiectelor din lumea nconjurtoare
presupune cunoaterea unor informaii despre acestea. n general,
aceste informaii se regsesc sub forma coordonatelor punctelor din
care se compun imaginile grafice.
Coordonatele utilizator sau coordonatele reale sunt acele
coordonate care identific obiectul n mediul su, n lumea
nconjurtoare. Acest spaiu este cunoscut sub numele de spaiul
utilizator. Teoretic spaiul utilizator se ntinde la infinit, dar
practic, sub aspectul reprezentrilor grafice computerizate, el este
limitat de cel mai mare numr real care poate fi memorat de
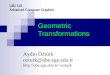
calculator. Se consider spaiul utilizator vizibil acea poriune
rectangular din spaiu, al crei coninut se reprezint grafic i care
se numete fereastr .
Cei patru parametri care definesc fereastra i vom nota cu, wl,
wt, wr, wb, i reprezint coordonatele colului stnga-sus (wl,wt),
window left-top, i dreapta-jos (wr,wb) window right-bottom.
Coordonatele utilizator aparin lumii reale, pot avea mrimi foarte
variate, au de obicei semnificaii fizice (kilometri, secunde, uniti
monetare etc.) i nu sunt legate n vreun fel de prezentarea grafic.
Percepia uman este tridimensional, ns reprezentarea grafic este una
plan, astfel nct coordonatele reale sunt cele date de proiecia pe
un suport grafic bidimensional.
Figura 2.1 Spaiul utilizator
Coordonatele diferitelor puncte din interiorul ferestrei sunt
cuprinse ntre wl i wr, respectiv wt i wb.
Reprezentarea coninutului unei ferestre pe ecranul
calculatorului nu implic neaprat utilizarea ntregului ecran.
Utilizarea ntregului ecran este aproape imposibil dac se dorete o
reprezentare fr deformri. Trebuie deci specificat o zon rectangular
de pe ecran n care se vizualizeaz fereastra. Aceast zon rectangular
se numete vizor (viewport) i va fi definit prin parametrii vl, vt,
vr, vb (Figura 2.2). Fiecrui punct aparinnd obiectului de
reprezentat i va corespunde n vizor un punct ecran identificat prin
coordonate ecran. Coordonatele ecran sunt de obicei raportate la
colul stnga-sus al ecranului, dar aceasta nu este o regul, pot fi
alese alte puncte de referin n funcie de instrumentele grafice
utilizate.
Figura 2.2 Spaiul ecran
Vizorul este deci poriunea din suportul grafic unde va fi
proiectat fereastra. Valoarile maxim pentru parametrii vl,vr,vt,vb
depind de caracteristicile dispozitivului grafic.
Coordonatele ferestrei se determin n raport de coordonatele
punctelor din care este alctuit obiectul de reprezentat. S
presupunem c un obiect este alctuit din n puncte, de coordonate
(xi, yi), i =1, n. Pentru a reprezenta grafic n ntregime obiectul,
coordonatele ferestrei sunt alese astfel nct:
, , ,.
Coordonatele vizorului vor fi n aa fel alese nct reprezentarea
grafic s se fac fr deformri. Pentru aceasta trebuie respectat
relaia:
.
Dac imaginea obiectului va suferi deformri fie ntr-un sens, fie
n cellalt.
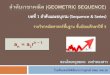
Pentru a obine reprezentarea unei ferestre (wl, wt, wr, wb)
ntr-un vizor (vl, vt, vr, vb) trebuie determinate relaiile de
legtur dintre coordonatele reale i cele ecran. Acestea sunt
determinate respectnd regula conservrii proporiilor. Unui punct de
coordonate reale (x,y) i va corespunde unul de coordonate ecran
(xe, ye), astfel nct distanele fa de marginile ferestrei, respectiv
vizorului s aib aceleai proporii [2,6] (Figura 2.3).
Figura 2.3 Transformarea de vizualizare
Relaiile sunt urmtoare:
, .
Prelucrnd aceste relaii, obinem pentru coordonatele ecran
relaiile:
,
unde,
Aplicaia 2.1. Sunt date n tabelul 2.1 coordonatele geografice
ale oraelor reedin de jude din Romania. Vor fi reprezentate grafic
aceste orae utiliznd transformrile de vizualizare.
Tabelul 2.1 Coordonatele geografice ale oraelor reedin de jude
din RomniaOraLatitudineLongitudineOraLatitudineLongitudine
Braov45.633325.5833Piteti44.8524.8667
Alba Iulia46.066723.5833Trgu Mure46.5524.5667
Arad46.333321.75Giurgiu43.883325.9667
Braila45.266727.9833Deva45.922.9
Galai45.4528.05Sibiu45.824.15
Cluj Napoca46.766723.6Satu Mare47.822.8833
Constana44.183328.65Vaslui46.633327.7333
Craiova44.316723.8Focani45.727.1833
Iai47.166727.6Tulcea45.166728.8
Baia Mare47.666723.5833Sfntu Gheorghe45.866725.7833
Ploieti44.9526.0167Bistrita Nasaud47.133324.4833
Oradea47.066721.9333Botoani47.7526.6667
Suceava47.633726.25Reia45.300821.8892
Timioara45.749421.2272Drobeta T.S.44.631922.6561
Bucureti44.433326.1Buzu45.1526.8333
Bacu46.566726.9Clrai44.227.3333
Trgovite44.933325.45Trgu Jiu45.0523.2833
Piatra Neam46.916726.3333Slatina44.433324.3667
Zalu47.223.05Alexandria43.983325.3333
Ramnicu Valcea45.124.3667Slobozia44.566727.3667
Miercurea Ciuc46.2125.48
2.1.2 Transformri elementare
Dac x i y sunt coordonatele unui punct M, ecuaiile x' = f(x, y),
y' = g(x, y) permit trecerea de la punctul M(x, y) la punctul
M'(x', y'). Aceste ecuaii definesc o transformare plan. Punctul M'
este transformatul lui M.
Putem considera coordonatele punctului ca o matrice 1SYMBOL 180
\f "Symbol"2. Fie produsul matriceal urmtor pe care l notm cu (x'
y'):
(x' y') = (x y) = (Ax + Cy Bx + Dy).
Toate punctele planului xOy nmulite cu o matrice 2SYMBOL 180 \f
"Symbol"2 vor da noi puncte (x', y') conform acestor relaii. Exist
tipuri de transformri care nu pot fi reprezentate printr-o matrice
2SYMBOL 180 \f "Symbol"2. De exemplu, translaia care este
reprezentat de ecuaiile x' = x + a i y' = y + b, nu poate fi
efectuat printr-o matrice 2SYMBOL 180 \f "Symbol"2. Pentru
rezolvarea situaiei se va introduce o a treia component a
vectorilor (x y) i (x' y'), obinnd (x y 1), (x' y' 1). Acestea sunt
coordonatele plane omogene (mai multe detalii despre coordonate
omogene vor fi date la capitolul 2.2.2.) Matricea transformrilor va
fi obligatoriu de tip 3SYMBOL 180 \f "Symbol"3. Un avantaj
suplimentar al matricelor 3SYMBOL 180 \f "Symbol"3 este c permit
obinerea transformrilor inverse, dnd familiilor de transformri
caracteristica de grup algebric. Transformarea invers realizeaz
trecerea de la punctul M'(x', y') la punctul M(x, y).
Transformrile plane elementare sunt urmtoarele:a) Translaia.
Ecuaiile de transformare sunt x' = x + a i y' = y + b. Dac a = b =
0, atunci punctul M(x, y) rmne neschimbat i obinem transformarea
identic. Transformarea invers este dat de relaiile: x = x' - a, y =
y' - b.
Produsul matriceal care permite obinerea translaiei este:
.
b) Scalarea. Este o transformare de tipul:
unde matricea 3x3 este matricea de scalare cu parametrii a si
b.c) Simetria. Exist urmtoarele tipuri de simetrii:
Simetria n raport cu axa OX: .
Simetria n raport cu axa OY: .
Simetria n raport cu originea O: .
d) Deformarea. Matricea de deformare este . Produsul matriceal
corespunztor este:
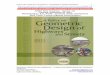
.e) Rotaia. Este considerat transformare elementar rotaia n
jurul originii, n sens trigonometric, cu un un unghi oarecare, (
(Figura 2.5). Punctul M se afl la o distan r (raza) fa de originea
sistemului de coordonate i sub un unghi fa de axa Ox. Relaiile care
permit obinerea noilor coordonate ale punctului M (coordonatele
punctului Mt) sunt:
Aceste relaii dau matricea de rotaie, , iar produsul matriceal
prin care se obin coordonatele punctului Mt este:
.
Compunerea transformrilor 2D. O transformare compus const ntr-o
succesiune de transformri elementare executate ntr-o anumit ordine.
Matricea de transformare corespunztoare se obine prin nmulirea n
ordinea stabilit a matricelor transformrilor elementare. Matricea
general de transformare este: . Parametrii A,B,C i D dau scalarea,
rotaia, deformarea i simetriile, n timp ce parametrii a i b dau
translaia.
Exemplul 1. Pentru rotaia n jurul unui punct arbitrar cu un
unghi ( n sens trigonometric, transformarea compus va fi dat de
transformrile elementare urmtoare:
- translaia centrului de rotaie la originea axelor;
- rotaia ateptat;
- translaia rezultatului la centrul de rotaie iniial.
Deci, se efectueaz produsul a trei matrice:
.
2.2 Transformri geometrice n spaiu
2.2.1 Sisteme de coordonate 3D
Complexitatea reprezentrilor tridimensionale implic o abordare
difereniat a sistemelor de coordonate 3D. Astfel, din punct de
vedere al orientrii axelor, sistemele de coordonate 3D pot fi
directe sau indirecte. Sunt mai multe metode de determinare a
orientrii axelor. O metod consacrat este regula minii drepte.
Conform acestei reguli, n cazul sistemelor directe, degetul arttor
de la mna dreapt arat sensul axei Ox, degetul mare sensul axei Oz,
iar cel mijlociu sensul axei Oy (Figura 2.7). Sistemele indirecte
au axa Ox invers orientat fa de sistemele directe.
Figura 2.7 Sisteme directe i indirecte
Din punct de vedere al raportrii, la obiectul reprezentrii sau
la observator, sistemele de coordonate 3D sunt de dou feluri:
sisteme de coordonate obiect i sisteme de coordonate observator.
Sistemul de coordonate obiect este sistemul de coordonate 3D n care
se afl obiectul de reprezentat. Este sistemul de coordonate propriu
obiectului, cu propria origine la care sunt raportate coordonatele
punctelor din care este alctuit obiectul. Sistemul de coordonate
obiect este un sistem direct (Figura 2.8). Sistemul de coordonate
observator este utilizat pentru a marca poziia observatorului.
Originea sa coincide cu poziia observatorului, iar axa Oz are
direcia i sensul privirii. Este un sistem de coordonate
indirect.
Figura 2.8 Sisteme de coordonate obiect i observator
Pentru localizarea punctelor n spaiu sunt utilizate trei sisteme
de coordonate: carteziene, sferice i cilindrice.
Coordonatele carteziene. Se precizeaz: x proiecia punctului pe
axa Ox,
y proiecia pe Oz,
z proiecia pe Oy,cu x SYMBOL 206 \f "Symbol" R, y SYMBOL 206 \f
"Symbol" R, z SYMBOL 206 \f "Symbol" R.
Coordonatele cilindrice ale unui punct P sunt: cota (z) proiecia
punctului P pe axa Oz, raza (R) distana de la originea sistemului
de coordonate la proiecia punctului P pe planul xOy,
unghiul (SYMBOL 113 \f "Symbol") unghiul dintre axa Ox i
proiecia lui P pe planul xOy,
cu z SYMBOL 206 \f "Symbol" R, R SYMBOL 206 \f "Symbol" [0,
SYMBOL 165 \f "Symbol"), SYMBOL 113 \f "Symbol" SYMBOL 206 \f
"Symbol" [0, 2SYMBOL 112 \f "Symbol"].
Coordonate sferice ale unui punct sunt:raza R distana de la
origine la punctul P, unghiul SYMBOL 106 \f "Symbol" (latitudinea)
unghiul dintre distana R i proiecia lui P pe planul xOy,
unghiul SYMBOL 113 \f "Symbol" (longitudinea) - unghiul dintre
axa Ox i proiecia lui P pe planul xOy, cu restriciile:
Figura 2.9 a) Coordonate cartezieneFigura 2.9 b) Coordonate
cilindrice
Figura 2.9 c) Coordonate sfericeTrecerea de la coordonate
carteziene la coordonate sferice se face astfel:
, unde .
Relaiile de trecere de la coordonate sferice la coordonate
carteziene sunt: x = R cosSYMBOL 113 \f "Symbol" cosSYMBOL 106 \f
"Symbol"; y = R sin SYMBOL 113 \f "Symbol" cos SYMBOL 106 \f
"Symbol"; z = R sin SYMBOL 106 \f "Symbol".
Trecerea din coordonate carteziene n coordonate cilindrice se
realizeaz prin relaiile: ; z = z; SYMBOL 113 \f "Symbol" se
calculeaz dup aceeai relaie ca la coordonatele sferice. Trecerea
invers, de la coordonate cilindrice la carteziene, este dat prin
relaiile: x = R cosSYMBOL 113 \f "Symbol"; y = R sinSYMBOL 113 \f
"Symbol"; z = z.
2.2.2 Transformri elementarePentru a putea exprima matriceal
toate transformrile se folosesc coordonatele omogene. Pentru un
punct dat M(x y z), vectorul punct are forma normal (x,y,z,1), 1
fiind norma dimensional. Reprezentarea unitar i combinarea
transformrilor geometrice spaiale se pot face ntr-un sistem de
coordonate cu patru dimensiuni, numit sistem de coordonate omogene.
Un punct P(x y z) se reprezint n sistem de coordonate omogene prin
punctul P(X Y Z w), unde X=xw, Y=yw, Z=zw, pentru orice valoare w0,
numit factor de scal. Trecerea la coordonate omogene se efectueaz
de regul fr modificarea cotelor x, y, z, lund w=1. Matricele de
transformare vor fi de dimensiuni 4x4. Transformrile elementare
sunt urmtoarele:a) Translatia. Este dat de relaia:
.b) Scalarea:
c) Simetriile. Sunt simetrii n raport cu axele, cu planele i n
raport cu originea. Matricele de simetrie sunt urmtoarele: n raport
cu axa Ox, , n raport cu axa Oy, , n raport cu axa Oz, , n raport
cu planul xOy, , n raport cu planul xOz, , n raport cu planul yOz,
, n raport cu originea O, .
d) Rotaiile. Sunt considerate transformri elementare rotaiile cu
un unghi oarecare n jurul axelor, n sens trigonometric. Rotaia cu
un unghi ( , n sens trigonometric n jurul axei Oz este echivalent
cu o rotaie 2D cu acelai unghi n jurul originii n planul xOy,
deoarece axa Oz este perpendicular pe acest plan. Matricea
corespunztoare este:
Celelalte dou matrice (rotaia n jurul axelor OX i OY) sunt:
.Compunerea transformrilor 3D. Se realizeaz la fel precum n plan. O
transformare compus const intr-o succesiune de transformri
elementare. Matricea transformrii compuse este produsul matricelor
transformrilor elementare. Ordinea de nmulire este dat de ordinea n
care se execut transformrile elementare corespunztoare.
Exemplul 2. Rotaie cu un unghi , n sens trigonometric, n jurul
unei axe paralele cu Ox. Rezultatul compunerii unei serii de
transformri se rezum la o matrice unic. Va fi identificat matricea
de rotaie sub un unghi SYMBOL 113 \f "Symbol" n jurul dreptei pq,
paralel cu Ox. Dreapta pq este definit de punctele p(a, b, c) i
q(d, e, f). Pentru obinerea transformrii compuse sunt parcuri paii:
1) se efectueaz o translaie T, care aduce punctul p n originea
sistemului de axe; 2) se efectueaz rotaia R cerut de unghiul SYMBOL
113 \f "Symbol"; 3) se execut translaia T' opus primeia, care
readuce punctul p la poziia sa iniial.
Este obinut produsul matriceal M = T SYMBOL 215 \f "Symbol" R
SYMBOL 215 \f "Symbol" T':
2.2.3 Imaginea plan a unui obiect 3D
Imaginea unui obiect aflat n spaiu este una plan. Este acea
imagine perceput de observator atunci cnd privete spre obiectul
respectiv. Forma imaginii depinde de mrimea obiectului i poziia
observatorului. Imaginea plan a unui obiect 3D se obine n trei
etape: determinarea coordonatelor observator, pornind de la
coordonatele obiect i poziia observatorului;
proiecia pe un plan aflat la o oarecare distan de observator i
obinerea coordonatelor plane reale ale obiectului;
transformarea de vizualizare i obinerea coordonatelor ecran ale
obiectului.
2.2.3.1 Determinarea coordonatelor observator
Imaginea plan a unui obiect 3D se poate obine printr-o
transformare compus , rezultat prin compunerea a patru transformri
elementare [2]. Obiectul privit se gsete ntr-un sistem de
coordonate propriu (sistem obiect), un sistem direct, avnd centrul
n O. Observatorul se afl n punctul O, are propriul sistem de
coordonate (sistem observator), un sistem indirect cu originea n O,
i axa Oz orientat n sensul privirii observatorului , adic spre
sistemul de coordonate obiect n care se afl obiectul privit. n
sistemul de coordonate obiect punctul O are coordonatele carteziene
(M,N,P). Lui i se pot asocia coordonatele sferice (R,(,() (Figura
3.6).
Cele patru etape prin care se poate obine imaginea plan a unui
obiect 3D corespund la cele patru transformri fundamentale pe care
trebuie s le suporte sistemul de coordonate obiect pentru a se
suprapune sistemului de coordonate observator. Fiecare din cele
patru etape transform parial sistemul (Ox,Oy,Oz) n sistemul
(Ox,Oy,Oz). Matricele de transformare elementare vor fi utilizate n
forma lor invers deoarece corespund unor transformri elementare
aplicate sistemului de coordonate i nu obiectelor din cadrul
sistemului.
Figura 2.10 Determinarea coordonatelor observator
Etapa 1. Translaia sistemului (Ox,Oy,Oz) de la originea O la
originea O a sistemului (Ox,Oy,Oz). Matricea de transformare
aplicat este:
A = , care datorit relaiilor dintre coordonatele carteziene i
coordonatele sferice ale punctului O devine
A = .
n urma transformrii rezult sistemul de coordonate intermediar
(Ox1,Oy1,Oz1):
Figura 2.11 Determinarea coordonatelor observator. Etapa 1
Etapa 2. Rotaia sistemului de coordonate (Ox1,Oy1,Oz1) cu un
unghi -(90-() n jurul axei Z1.
Inversa matricei de rotaie cu un unghi oarecare ( n jurul axei
Oz este . Unghiul ( n acest caz este 90-( iar matricea de
transformare aplicat este B = , deoarece cos((-90) = sin(, iar
sin((-90) = -cos(.
n urma rotaiei rezult sistemul de coordonate intermediar
(Ox2,Oy2,Oz2):
Figura 2.12 Determinarea coordonatelor observator. Etapa 2Etapa
3. Rotaia sistemului (Ox2,Oy2,Oz2) cu un unghi 90+( n jurul axei
Ox2.
Inversa matricei generale de rotaie cu un unghi ( n jurul axei
OX este . n cazul de fa ( = 90+(. innd cont de relaiile
cos(90+() = -sin( i sin(90+() = cos(, rezult matricea de
transformare C = . n urma transformrii rezult sistemul de
coordonate intermediar (Ox3,Oy3,Oz3):
Figura 2.13 Determinarea coordonatelor observator. Etapa 3
Etapa 4. Conversia sistemului de coordonate (Ox3,Oy3,Oz3),
dintr-un sistem indirect ntr-un sistem direct. Matricea de
transformare aplicat este: D = , o matrice de simetrie, deoarece se
schimb doar sensul axei Ox3. n urma acestei ultime transformri
rezult sistemul de coordonate (Ox4,Oy4,Oz4), care este echivalent
cu sistemul de coordonate observator (Ox,Oy,Oz).
Matricea compus , T , este determinat astfel:
T = A(B(C(D = .
Aplicnd fiecrui punct al unui obiect aflat n sistemul de
coordonate propriu aceast transformare, vom obine coordonatele sale
observator. Astfel, dac un punct oarecare din componena obiectului
are coordonatele reale omogene (x,y,z,1), coordonatele sale n
sistemul observator sunt:
(xo,yo,zo,1) = (x,y,z,1)(T,adic .
2.2.3.2 Proiecia plan a unui obiect 3D
n general, prin proiecie se nelege ansamblul de transformri pe
care le sufer un punct aflat ntr-un sistem n-dimensional pentru a
trece ntr-un sistem de dimensiuni mai mici. Proieciile pe un plan n
grafica 3D sunt cunoscute sub numele de proiecii geometrice plane.
Acestea se mpart n dou mari clase:
1. Proieciile perspectiv. n acest tip de proiecii, centrul de
proiecie se afl la o distan finit de planul de proiecie.
Figura 2.14 Proiecia perspectiv
Proiecia perspectiv creaz un efect vizual asemntor celui
perceput de sistemul vizual uman. Mrimea obiectului proiectat este
invers proporional cu distana ce separ obiectul de centrul de
proiecie. Distanele i unghiurile schimb aadar proiecia, mai puin
pentru acele suprafee ale obiectului proiectat care sunt paralele
cu planul de proiecie. n funcie de existena suprafeelor paralele cu
planul de proiecie sunt tratate distinct trei tipuri de proiecie
perspectiv:
- cnd cel puin una din suprafeele obiectului proiectat este
paralel cu planul de proiecie;
- cnd cel puin una din muchiile obiectului proiectat este
paralel cu planul de proiecie, fr ca vreo suprafa s fie paralel cu
acesta;
- cnd nu exist muchii paralele cu planul de proiecie.
2. Proiecii paralele. n acest tip de proiecii, centrul de
proiecie este situat la o distan infinit de obiect.
Figura 2.15 Proiecia paralel
Proiecia paralel conserv mrimea obiectului proiectat. Pentru a
putea proiecta imaginea unui obiect pe un plan, este necesar s
asociem coordonatelor reale ale fiecrui punct din care este alctuit
obiectul, coordonatele ecran.
Se consider c:
- ecranul este un plan perpendicular pe dreapta ce unete ochiul
cu originea sistemului de coordonate n care se afl obiectul;
- ecranul este situat la o distan D de ochiul
observatorului;
- sistemul de coordonate al observatorului are originea plasat n
punctul n care se afl ochiul, iara axa Z este orientat ctre
originea sistemului de coordonate n care se afl obiectul, fiind un
sistem indirect dreapta.
Figura 2.16 Planul de proiecie
Se noteaz cu R distana de la observator la originea sistemului
de coordonate obiect. Dac R crete, imaginea pe ecran a obiectului
vizualizat, scade i invers. Imaginea se construiete proiectnd
fiecare punct al obiectului n planul ecran. Astfel, un punct care
are coordonatele observator (xo,yo,zo), va avea coordonatele plane
(xr,yr).
n figura 2.17 se poate observa n detaliu proiecia coordonatei xo
a unui punct pe planul de proiecie. B reprezint proiecia pe planul
xOz a punctului. Din asemnarea triunghiurilor OAB i OAB rezult: xr
= . n mod asemntor obinem i yr = .
Observaie. n figura 2.17 planul de proiecie se afl dup
obiect.
Schimbrile efectuate asupra unghiurilor ( i ( permit
vizualizarea obiectului din poziii diferite. Schimbrile valorii R
permit observarea obiectului de la distane diferite. O consecin a
modificrii lui R este mrirea sau diminuarea obiectului, astfel:
- dac R se micoreaz, obiectul se mrete;
- dac R crete, obiectul se micoreaz.
Figura 2.17 Proiecia
O alt cale prin care se poate mrii sau micora imaginea
obiectului este modificarea distanei D de la ecranul de proiecie la
observator.
Figura 2.18 Relaia dintre R i D
Deoarece att R ct i D influeneaz mrimea imaginii obiectului,
este foarte important nelegerea rolului specific al fiecruia dintre
cei doi parametrii. Datorit proiecei n perspectiv, un obiect situat
foarte aproape de observator va fi puternic deformat i cu ct
distana scade cu att deformarea va fi mai puternic. Pentru a
diminua aceste deformri orice modificare a parametrului R trebuie
nsoit de o modificare compensatorie a parametrului D [2]. Acest
lucru este necesar deoarece n timp ce modificrile asupra lui R duc
la o deformare a obiectului, modificrile lui D nu au efect dect
asupra taliei obiectului.
2.2.4 Decupajul n grafica 3D
Dac n grafica 2D o zon decupat din fereastr apare sub forma unei
ferestre de vizualizare, n grafica 3D se opereaz cu noiunea de
volum de vizualizare [2](Figura 2.19). Volumul de vizualizare are o
form piramidal, cu vrful n originea sistemului de coordonate
observator i baza aflat la o distan D fa de acesta. Forma de
piramid a volumului de vizualizare permite formularea ecuaiilor
matematice de decupare ntr-o manier simpl.
Decupajul const n trasarea dintr-un obiect doar a prii care se
afl n cadrul volumului de vizualizare . Pentru aceasta trebuie
indentificate punctele obiectului care se afl n cadrul volumului
precum i interseciile dintre liniile obiectului i feele volumului
de vizualizare.
Condiiile de vizibilitate ale punctelor. Se noteaz cu EX
semilimea bazei i cu EY semilungimea ei. Planul superior al
piramidei poate fi redus la o dreapt ce trece prin origine i prin
punctul a. Ecuaia sa este Y = (Figura 2.20).
Figura 2.19 Volumul de vizualizare
Asemntor, planul inferior trece prin originea O i punctul a
Ecuaia planului inferior este: Y = . Planul dreapta se reduce la o
dreapt ce trece prin originea O i prin punctul b, iar planul stnga
se reduce la o dreapt ce trece prin O i b: X = , X = (Figura
2.20).
Figura 2.20 Condiiile de vizibilitate n raport cu planurile
superior, inferior, stnga i dreapta
Pentru a fi vizibil, un punct trebuie s aparin volumului de
vizualizare. Dac se consider un punct oarecare al spaiului
P(x1,y1,z1) condiiile de vizibilitate referitoare la acest punct
sunt urmtoare:
y1
pentru a fi sub planul superior,
y1
pentru a fi peste planul inferior,
x1
pentru a fi la dreapta planului stng,
x1
pentru a fi la stnga planului drept.
Intersecia unei drepte oarecare cu unul din plane. Ecuaia unei
drepte ce trece prin dou puncte (x1,y1,z1) i (x2,y2,z2) este:
.
Dac se noteaz cu t valoarea acestor rapoarte, se obin ecuaiile
parametrice ale unei drepte trecnd prin dou puncte din spaiu:
.
(*)
Pentru a determina intersecile cu cele patrui plane se nlocuiesc
valorile x, y i z n ecuaiile corespunztoare. Rezult urmtoarele
valori pentru t:
- pentru intersecia cu planul superior, t = ,
- pentru intersecia cu planul inferior t = ,
- pentru intersecia cu planul lateral stnga t= ,
- pentru intersecia cu planul lateral dreapta t = .
Pe baza valorilor lui t se determin punctul de intersecie
(x,y,z) prin nlocuirea valorilor corespunztoare n ecuaiile
(*).6667
_1249416444.unknown
_1249459904.unknown
_1249460234.unknown
_1253777951.unknown
_1253778085.doc
Fereastra
Vizorul
(x, y)
(vl,vt)
(vr,vb)
(xe, ye)
(wl,wt)
(wr,wb)
_1253786873.doc
(
O
X
Y
X
Y
O
Z
ZO
(
R
M
N
P
_1253789703.doc
_1253789692.doc
ZO
O
YO
XO
EY
EX
a
a
b
b
D
_1254121869.unknown
_1253782290.doc
M
Mt
O
Y
X
r
Figura 2.5 Rotaia
_1253778008.doc
Ecranul calculatorului
Vizorul
(vl,vt)
(vr,vb)
_1249460975.doc
_1249460959.doc
Planul dreapta
Planul stnga
EX
EX
ZO
O
b
D
XO
_1249461098.unknown
_1249461144.unknown
_1249461175.unknown
_1249461187.unknown
_1249461106.unknown
_1249461090.unknown
_1249461095.unknown
_1249461076.doc
_1249461064.doc
Planul inferior
Planul superior
EY
EY
YO
ZO
O
a
D
_1249460667.doc
D
R
Obiect
Imagine
Observator
_1249460792.unknown
_1249460239.unknown
_1249460013.unknown
_1249460038.unknown
_1249460044.unknown
_1249460034.unknown
_1249459970.unknown
_1249460009.unknown
_1249459965.unknown
_1249417601.unknown
_1249459898.unknown
_1249417613.unknown
_1249417617.unknown
_1249417609.unknown
_1249417590.unknown
_1249417595.unknown
_1249417586.unknown
_1249417305.unknown
_1249416678.unknown
_1249403696.unknown
_1249416005.doc
Oz
Oy
Ox
O
P
z
x
y
_1249416185.doc
Oz
Oy
Ox
O
P
R
_1249416078.doc
Oz
Oy
Ox
O
P
z
R
_1249415857.doc
Oz
Oy
Ox
O
Sistem de coordonate obiect
- sistem direct -
Sistem de coordonate observator
- sistem indirect -
Oz
Ox
Oy
O
_1249403719.unknown
_1249403732.unknown
_1249403937.unknown
_1249403723.unknown
_1249403712.unknown
_1249403717.unknown
_1249400824.unknown
_1249403677.unknown
_1249403688.unknown
_1249403692.unknown
_1249403681.unknown
_1249400829.unknown
_1233476475.doc
O
D
zo
Z
X
xo
xr
X
Y
Y
A
B
B
A
_1249400580.unknown
_1249400816.unknown
_1249400820.unknown
_1249400595.unknown
_1249400569.unknown
_1249400573.unknown
_1233478066.unknown
_1249400546.unknown
_1233478065.unknown
_1233478064.unknown
_1233474814.doc
(
O
Y1
Z1
X
Y
O
Z
X1O
(
_1233476445.doc
(
O
X
Y
X
Y
O
Z
ZO
ZE
XE
YE
(
_1174981674.doc
(
Y3
Y
O
Z
(
X3O
O
X
Z3
_1142759631.doc
b
a
a
b
Centrul de proiecie
( (
Planul de proiecie
_1174981560.doc
(
Y2
Z2
Y
O
Z
(
(
X2O
O
X
_1142759614.doc
b
a
a
b
Centrul de proiecie
Planul de proiecie