Embed Size (px)
Citation preview
5/10/2014
1
1 Danang University of Technology
Chương 3 ĐIỀU CHỈNH TỐC ĐỘ HỆ THỐNG TRUYỀN
ĐỘNG ĐIỆN
2 Danang University of Technology
3.1 Khái niệm chung
Điều chỉnh tốc độ truyền động điện là dùng những phương pháp thuần túy
điện, tác động lên bản thân hệ thống truyền động điện (nguồn và động cơ điện) để
thay đổi tốc độ quay của trục động cơ điện.
Tốc độ làm việc của truyền động điện do công nghệ yêu cầu và được gọi là tốc
độ đặt, hay tốc độ mong muốn. Trong quá trình làm việc, tốc độ của động cơ
thường bị thay đổi do sự biến thiên của tải, của nguồn và do đó gây ra sai lệch tốc
độ thực so với tốc độ đặt. Trong các hệ truyền động điện tự động thường dùng các
phương pháp khác nhau để ổn định tốc độ động cơ, điều chỉnh tốc độ động cơ để
có được tốc độ mong muốn.
3 Danang University of Technology
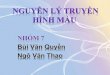
Sơ đồ khối của một hệ thống tự động điều chỉnh tốc độ truyền động điện
Nguồnđiện
(DC/AC)
BỘ BIẾN ĐỔI
BỘ ĐIỀU KHIỂN
ĐỘNG CƠ
CCSX
Tốc độ mong muốn
Vị trí/ Tốc độ/ Gia tốc
Điện áp
Tốc độĐiện áp/Dòng điện
4 Danang University of Technology
3.2 Các chỉ tiêu đánh giá chất lượng điều chỉnh tốc độ
3.2.1 Dải điều chỉnh tốc độ
Dải điều chỉnh tốc độ (hay phạm vi điều chỉnh tốc độ) là tỉ số giữa các giá trị tốc
độ làm việc lớn nhất và nhỏ nhất của hệ TĐĐ ứng với một mômen tải đã cho.
min
max
D
Dải điều chỉnh tốc độ của một hệ TĐĐ càng lớn càng tốt.
Mỗi một máy sản xuất yêu cầu một dải điều chỉnh nhất định và mỗi mộtphương pháp điều chỉnh tốc độ chỉ đạt được một dải điều chỉnh nào đó.
5/10/2014
2
5 Danang University of Technology
3.2.2 Độ trơn điều chỉnh
Độ trơn điều chỉnh tốc độ khi điều chỉnh được biểu thị bởi tỷ sốgiữa 2 giá trị tốc độ của 2 cấp kế tiếp nhau trong dải điều chỉnh:
i
i
1
Trong đó: i - Tốc độ ổn định ở cấp i.
i+1 - Tốc độ ổn định ở cấp i+1.
Trong một dải điều chỉnh tốc độ, số cấp tốc độ càng lớn thì sự chênh
lệch tốc độ giữa 2 cấp kế tiếp nhau càng ít do đó độ trơn càng tốt.
6 Danang University of Technology
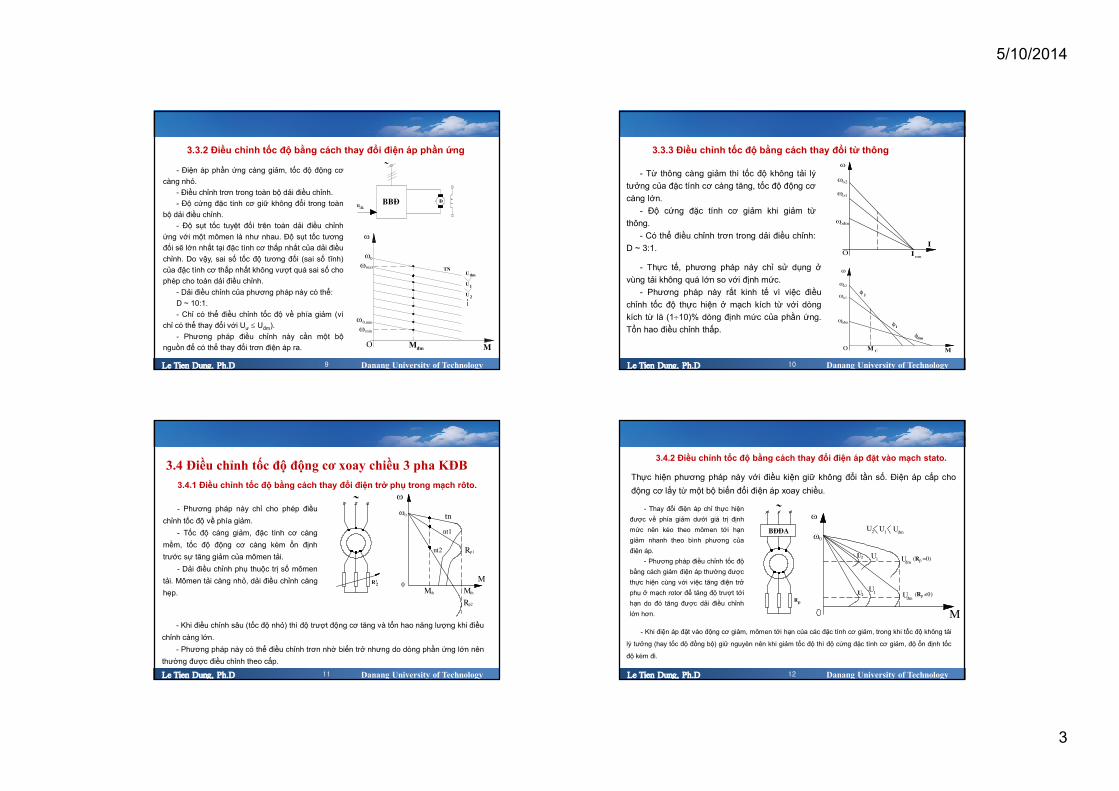
3.2.3 Độ ổn định tốc độ (độ cứng của đặc tính cơ)
Để đánh giá và so sánh các đặc tính cơ, người ta đưa ra khái niệm độ cứng đặc
tính cơ và được tính:
M
M
M
Nếu || bé thì đặc tính cơ là mềm (|| < 10).
Nếu || lớn thì đặc tính cơ là cứng (|| = 10 100).
7 Danang University of Technology
3.2.4 Tính kinh tế
Hệ điều chỉnh có tính kinh tế khi vốn đầu tư nhỏ, tổn hao năng lượng ít,
phí tổn vận hành không nhiều.
3.2.5 Sự phù hợp giữa đặc tính điều chỉnh và đặc tính tải
Khi chọn hệ điều chỉnh tốc độ với phương pháp điều chỉnh nào đó cho
một máy sản xuất cần lưu ý sao cho các đặc tính điều chỉnh bám sát yêu
cầu đặc tính của tải máy sản xuất. Như vậy hệ làm việc sẽ đảm bảo được
các yêu cầu chất lượng, độ ổn định...
Ngoài các chỉ tiêu trên, tuỳ trường hợp cụ thể mà ta có thể có những
đòi hỏi khác buộc hệ điều chỉnh tốc độ cần phải đáp ứng.
8 Danang University of Technology
3.3 Điều chỉnh tốc độ động cơ điện một chiều kích từđộc lập (song song)
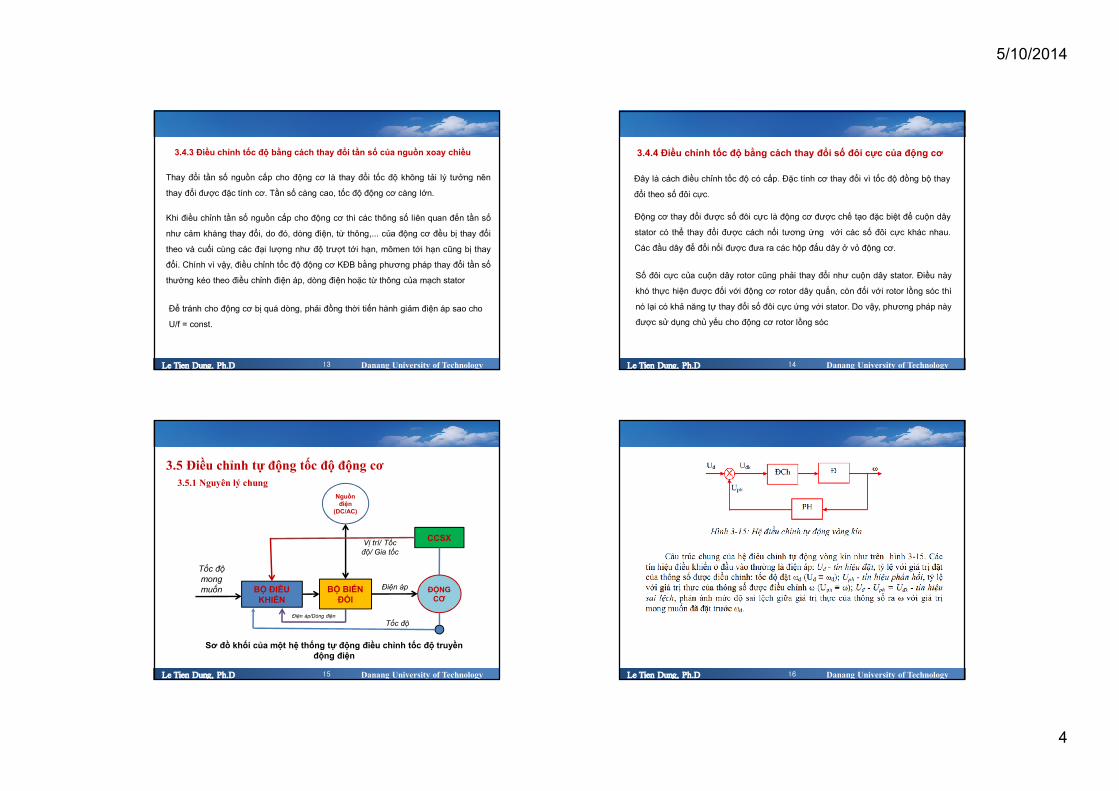
3.3.1 Điều chỉnh tốc độ bằng cách thay đổi điện trở ở mạch phần ứng
o
o
M
1max
1min
Mc1M
TN
nt1
nt2
nt3
nt4
R =0p
Rp1
p2R
p3R
- Điện trở mạch phần ứng càng tăng, độdốc đặc tính cơ càng lớn, đặc tính cơ càngmềm và độ ổn định tốc độ càng kém, sai số tốcđộ càng lớn.
- Phương pháp chỉ cho phép điều chỉnhthay đổi tốc độ về phía giảm (do chỉ có thể tăngthêm điện trở).
- Vì điều chỉnh tốc độ nhờ thêm điện trởvào mạch phần ứng cho nên tổn hao công suấtdưới dạng nhiệt trên điện trở càng lớn.
- Dải điều chỉnh phụ thuộc vào trị sốmômen tải. Tải càng nhỏ (M1) thì dải điều chỉnhcàng nhỏ. Phương pháp này cho D1= 5:1.
5/10/2014
3
9 Danang University of Technology
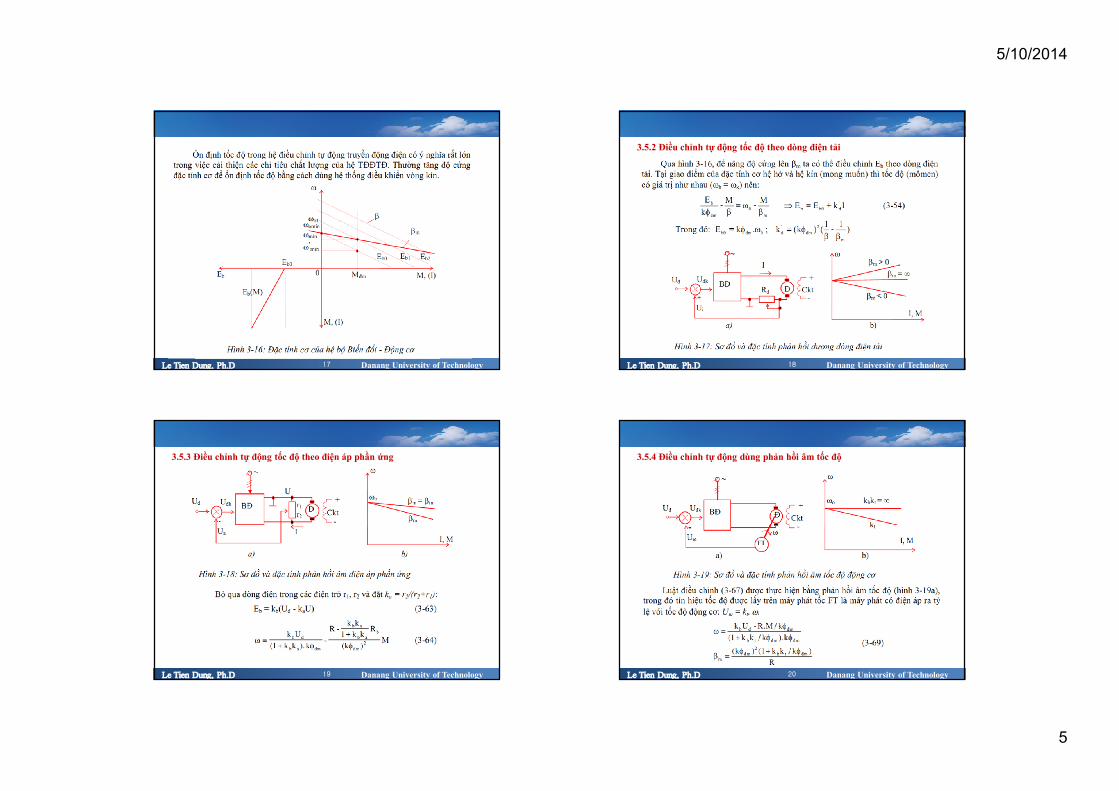
3.3.2 Điều chỉnh tốc độ bằng cách thay đổi điện áp phần ứng
BB§
~
u®k§
M®m M
0
U®m
1U
2U
TN
o
0.minmin
max
- Điện áp phần ứng càng giảm, tốc độ động cơ
càng nhỏ.
- Điều chỉnh trơn trong toàn bộ dải điều chỉnh.
- Độ cứng đặc tính cơ giữ không đổi trong toàn
bộ dải điều chỉnh.
- Độ sụt tốc tuyệt đối trên toàn dải điều chỉnh
ứng với một mômen là như nhau. Độ sụt tốc tương
đối sẽ lớn nhất tại đặc tính cơ thấp nhất của dải điều
chỉnh. Do vậy, sai số tốc độ tương đối (sai số tĩnh)
của đặc tính cơ thấp nhất không vượt quá sai số cho
phép cho toàn dải điều chỉnh.
- Dải điều chỉnh của phương pháp này có thể:
D ~ 10:1.
- Chỉ có thể điều chỉnh tốc độ về phía giảm (vì
chỉ có thể thay đổi với Uư Uđm).
- Phương pháp điều chỉnh này cần một bộ
nguồn để có thể thay đổi trơn điện áp ra.
10 Danang University of Technology
3.3.3 Điều chỉnh tốc độ bằng cách thay đổi từ thông
o
o®m
o1
o2
I
I nm
MoC M
2
1
®m
o®m
o1
o2
- Từ thông càng giảm thì tốc độ không tải lý
tưởng của đặc tính cơ càng tăng, tốc độ động cơ
càng lớn.
- Độ cứng đặc tính cơ giảm khi giảm từ
thông.
- Có thể điều chỉnh trơn trong dải điều chỉnh:
D ~ 3:1.
- Thực tế, phương pháp này chỉ sử dụng ở
vùng tải không quá lớn so với định mức.
- Phương pháp này rất kinh tế vì việc điều
chỉnh tốc độ thực hiện ở mạch kích từ với dòng
kích từ là (110)% dòng định mức của phần ứng.
Tổn hao điều chỉnh thấp.
11 Danang University of Technology
3.4 Điều chỉnh tốc độ động cơ xoay chiều 3 pha KĐB
3.4.1 Điều chỉnh tốc độ bằng cách thay đổi điện trở phụ trong mạch rôto.
~
R'2
0
M
MthMth
Rp1
p2R
tn
nt1
nt2
- Phương pháp này chỉ cho phép điều
chỉnh tốc độ về phía giảm.
- Tốc độ càng giảm, đặc tính cơ càng
mềm, tốc độ động cơ càng kém ổn định
trước sự tăng giảm của mômen tải.
- Dải điều chỉnh phụ thuộc trị số mômen
tải. Mômen tải càng nhỏ, dải điều chỉnh càng
hẹp.
- Khi điều chỉnh sâu (tốc độ nhỏ) thì độ trượt động cơ tăng và tổn hao năng lượng khi điều
chỉnh càng lớn.
- Phương pháp này có thể điều chỉnh trơn nhờ biến trở nhưng do dòng phần ứng lớn nên
thường được điều chỉnh theo cấp.
12 Danang University of Technology
3.4.2 Điều chỉnh tốc độ bằng cách thay đổi điện áp đặt vào mạch stato.
Thực hiện phương pháp này với điều kiện giữ không đổi tần số. Điện áp cấp cho
động cơ lấy từ một bộ biến đổi điện áp xoay chiều.
~
B§§A
pR
M
0
®mU1U2U
®mUU1
2U
p(R =0)
p(R
U1 ®mU2U
- Thay đổi điện áp chỉ thực hiện
được về phía giảm dưới giá trị định
mức nên kéo theo mômen tới hạn
giảm nhanh theo bình phương của
điện áp.
- Phương pháp điều chỉnh tốc độ
bằng cách giảm điện áp thường được
thực hiện cùng với việc tăng điện trở
phụ ở mạch rotor để tăng độ trượt tới
hạn do đó tăng được dải điều chỉnh
lớn hơn.
- Khi điện áp đặt vào động cơ giảm, mômen tới hạn của các đặc tính cơ giảm, trong khi tốc độ không tải
lý tưởng (hay tốc độ đồng bộ) giữ nguyên nên khi giảm tốc độ thì độ cứng đặc tính cơ giảm, độ ổn định tốc
độ kém đi.
5/10/2014
4
13 Danang University of Technology
3.4.3 Điều chỉnh tốc độ bằng cách thay đổi tần số của nguồn xoay chiều
Thay đổi tần số nguồn cấp cho động cơ là thay đổi tốc độ không tải lý tưởng nên
thay đổi được đặc tính cơ. Tần số càng cao, tốc độ động cơ càng lớn.
Khi điều chỉnh tần số nguồn cấp cho động cơ thì các thông số liên quan đến tần số
như cảm kháng thay đổi, do đó, dòng điện, từ thông,... của động cơ đều bị thay đổi
theo và cuối cùng các đại lượng như độ trượt tới hạn, mômen tới hạn cũng bị thay
đổi. Chính vì vậy, điều chỉnh tốc độ động cơ KĐB bằng phương pháp thay đổi tần số
thường kéo theo điều chỉnh điện áp, dòng điện hoặc từ thông của mạch stator
Để tránh cho động cơ bị quá dòng, phải đồng thời tiến hành giảm điện áp sao cho
U/f = const.
14 Danang University of Technology
3.4.4 Điều chỉnh tốc độ bằng cách thay đổi số đôi cực của động cơ
Đây là cách điều chỉnh tốc độ có cấp. Đặc tính cơ thay đổi vì tốc độ đồng bộ thay
đổi theo số đôi cực.
Động cơ thay đổi được số đôi cực là động cơ được chế tạo đặc biệt để cuộn dây
stator có thể thay đổi được cách nối tương ứng với các số đôi cực khác nhau.
Các đầu dây để đổi nối được đưa ra các hộp đấu dây ở vỏ động cơ.
Số đôi cực của cuộn dây rotor cũng phải thay đổi như cuộn dây stator. Điều này
khó thực hiện được đối với động cơ rotor dây quấn, còn đối với rotor lồng sóc thì
nó lại có khả năng tự thay đổi số đôi cực ứng với stator. Do vậy, phương pháp này
được sử dụng chủ yếu cho động cơ rotor lồng sóc
15 Danang University of Technology
3.5 Điều chỉnh tự động tốc độ động cơ3.5.1 Nguyên lý chung
Nguồnđiện
(DC/AC)
BỘ BIẾN ĐỔI
BỘ ĐIỀU KHIỂN
ĐỘNG CƠ
CCSX
Tốc độ mong muốn
Vị trí/ Tốc độ/ Gia tốc
Điện áp
Tốc độĐiện áp/Dòng điện
Sơ đồ khối của một hệ thống tự động điều chỉnh tốc độ truyền động điện
16 Danang University of Technology
5/10/2014
5
17 Danang University of Technology 18 Danang University of Technology
3.5.2 Điều chỉnh tự động tốc độ theo dòng điện tải
19 Danang University of Technology
3.5.3 Điều chỉnh tự động tốc độ theo điện áp phần ứng
20 Danang University of Technology
3.5.4 Điều chỉnh tự động dùng phản hồi âm tốc độ
5/10/2014
6
21 Danang University of Technology
3.5.5 Điều chỉnh tự động dùng phản hồi âm dòng điện có ngắt
22 Danang University of Technology
3.6 Điều chỉnh tốc độ hệ truyền động Bộ biến đổi - động cơ
3.6.1 Bộ biến đổi - động cơ một chiều
3.6.1.1 Hệ máy phát – động cơ
23 Danang University of Technology
3.6.1.2 Hệ chỉnh lưu – động cơ
24 Danang University of Technology
a) Các hệ thống Chỉnh lưu – Động cơ không đảo chiều quay
5/10/2014
7
25 Danang University of Technology 26 Danang University of Technology
27 Danang University of Technology
b) Các hệ thống Chỉnh lưu – Động cơ có đảo chiều quay
28 Danang University of Technology
5/10/2014
8
29 Danang University of Technology
3.6.1.3 Hệ băm điện áp – động cơ một chiều
30 Danang University of Technology
3.6.2 Bộ biến đổi - động cơ xoay chiều không đồng bộ
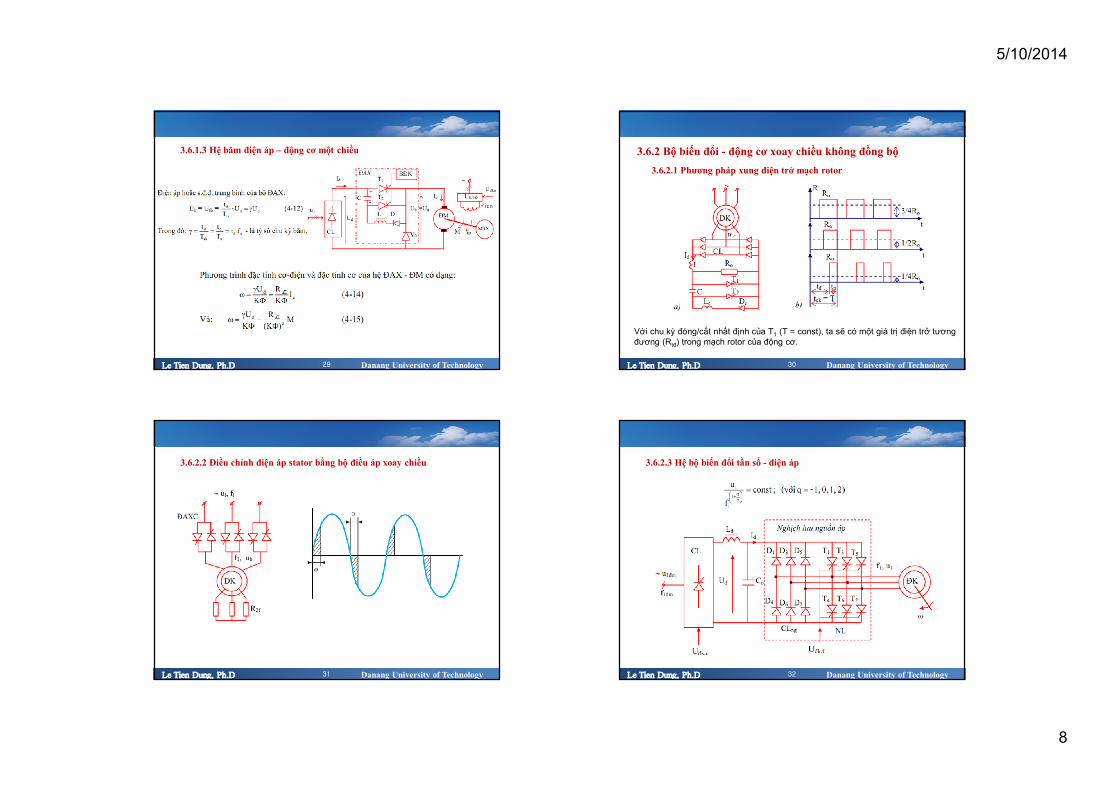
3.6.2.1 Phương pháp xung điện trở mạch rotor
Với chu kỳ đóng/cắt nhất định của T1 (T = const), ta sẽ có một giá trị điện trở tươngđương (Rtđ) trong mạch rotor của động cơ.
31 Danang University of Technology
3.6.2.2 Điều chỉnh điện áp stator bằng bộ điều áp xoay chiều
32 Danang University of Technology
3.6.2.3 Hệ bộ biến đổi tần số - điện áp
5/10/2014
9
33 Danang University of Technology
THANK YOU FOR YOUR ATTENTION!