7/23/2019 Worden Pendulum
1/2
Worden Zero-length Spring Pendulum Analysis
B. H. Suits, Physics Dept, Michigan Tech University, 2005.
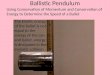
See the figures for geometry and definition of variables.
The torque due to gravity (clockwise) is given by
. g Mga= cos
The torque due to the spring (counter-clockwise) is given by
.
s s sF Fbd
l bkd
l l
l= = =
sincos ( )
cos0
The equilibrium spring length, leq, is determined by the
condition for zero
torque
.bkdl l
l Mga
eq
eq
=0
(However, if the ls cancel and one simply has the conditionl0
0=
k Mga bd = /
which has no or ldependence, corresponding to a very
flatequilibrium or none at all that is, even a minor change in the
force due
to gravity can make a huge change in the position.)
So, assuming l00,
.l lbkd
bkd Mgal
Mga
bkdeq =
=
0 0
1
1
The net torque can be written
=
=
Mga bkd
l l
lbkl d
l leq0
0
1 1cos cos
whereMgawas replaced using the previous result. The changes in
the torque with angle about equilibrium are given
by
d
dbkl d
l
dl
d l leq eq
eq
=
0 2
1 1 1sin
and
dl
d
bd
b d bd
bd
leq eq
eq
eq
=
+ +=
cos
( sin )
cos
/2 2 1 22
and so if we now consider only the case where the system is
adjusted so equilibrium occurs when = 0,
.d
dkl bd
b deq
=
+0
2
2 2 3 2
( )
( ) /
Near equilibrium, the equation of motion gives
+
=klbd
b dMa
0
2
2 2 3 2
2( )
( )( )&&
/
whereMa2is the moment of inertia for rotations assuming the mass
of the support structure and spring are negligible
and thatMcan be treated as a point mass. If that is not the
case, a more correct moment of inertia should be used.
7/23/2019 Worden Pendulum
2/2
This can be written
&&
( ) /
/
= +
=
bd
a
kl
M b d
0
2 2 3 2
1 2 2
2
so the solutions are sinusoidal in time with angular
frequency
. =+
=bd
akl
M b dbd
alk
Mlleq eq
0
2 2 3 2
1 2
0
( ) /
/
This particular result for the frequency is only for the case
where the equilibrium position has been adjusted to be at
= 0, that is , and not the most general case. See the above
equations if you wish to derive thel b deq = +2 2
general case. It is possible to use other equilibrium positions
with equivalent results.
Note that when l060, the frequency goes to zero (the period
becomes infinite). That situation is analogous to
placing an object on a frictionless table. If the table is
perfectly horizontal (in this case, the parameters a, b, d, k,M
are just right, that is kbd/Ma= g) then the object will stay
wherever you put it. If any of these parameters (or g) is
changed, the object rolls toward infinity until it falls off the
table. In practice, finding a spring with l0exactly zero is
impossible and real springs do not obey Hookes law and the
response will be finite.
When used to measure small changes in g, you can estimate the
sensitivity by looking only at the equilibrium
position. In actual instruments, what one usually determines is
how much a given parameter must be changed to
bring the system back to equilibrium if there is a change in
g.