Embed Size (px)
Citation preview
Східноєвропейський національний університет імені Лесі Українки
Факультет інформаційних систем, фізики та математики
Кафедра алгебри і математичного аналізу
Ольга Мусіївна Кравчук
Геометричні перетворення
Ортогональні перетворення
Частина І
Методичні рекомендації до вивчення вибіркової навчальної дисципліни
«Геометричні перетворення»
для магістрів
спеціальності 014 Середня освіта (Математика)
Луцьк-2018
2
УДК 528.852(072)
К 77
Рекомендовано до друку науково-методичною радою Східноєвропейського
національного університету імені Лесі Українки
(протокол №__ від ___________ 2018 року)
Рецензенти:
Матвіїв Ю.Я., доктор тех. наук, професор кафедри фундаментальних наук Луцького
національного технічного університету.
Гембарська С.Б., кандидат фіз.-мат. наук, доцент кафедри диференціальних рівнянь і
математичної фізики Східноєвропейського національного університету імені Лесі Українки.
Кравчук О.М.
К 77 Геометричні перетворення. Частина І. Ортогональні перетворення: методичні
рекомендації до вивчення вибіркової навчальної дисципліни «Геометричні перетворення» /
Ольга Мусіївна Кравчук. – Луцьк, 2018. – 73с.
У методичних рекомендаціях подано матеріал до вивчення тем: « Ортогональні
перетворення», «Перетворення площини», «Паралельне перенесення», «Перетворення
симетрій».
Видання призначене для магістрів галузі знань 01 Освіта,
спеціальності 014 Середня освіта (Математика), освітньої програми Математика
УДК 528.852(072)
© Кравчук О.М..
© Східноєвропейський національний
університет імені Лесі Українки, 2018
3
ЗМІСТ
Вступ…………………………………………………………………….. .3
Розділ 1. Перетворення площини……………………………………………..5
1.1. Історико-філософські аспекти теми…………………………………….......5
1.2. Поняття відображення фігур……………………………………………….11
1.3. Перетворення фігури………………………………………………………..12
1.4. Ортогональні відображення …………………………………………...…..17
1.5. Властивості ортогональних відображень ………………………………...18
1.6. Орієнтація………………………………………………………………..….24
1.7. Ортогональні перетворення першого і другого роду………………….....29
Розділ 2. Паралельне перенесення площини…………………………….…32
2.1. Паралельне перенесення і вектор…………………………………….……32
2.2. Паралельне перенесення у координатах…………………………….…….34
2.3. Властивості паралельного перенесення…………………………….……..34
2.2. Найпростіші застосування паралельного перенесення ……………….…38
Розділ 3. Перетворення симетрій……………………………………..….…..42
3.1. Поняття симетрії відносно точки……………………………………….…42
3.1.1. Симетрія відносно точки на площині………….……………………..42
3.1.2. Перетворення симетрії відносно точки...……………………….…..…43
3.1.3. Координатні формули симетрії відносно точки…………….………..…49
3.2. Симетрія відносно прямої……………………………………………….....50
3.2.1.Поняття симетрії відносно прямої……………………………….….…50
3.2.2. Означення і задання симетрії відносно прямої……………………..…...51
3.2.3. Координатні формули симетрії відносно прямої………………….....53
3.2.4. Властивості симетрії відносно прямої…………………………….….…54
3.2.5. Застосування осьової симетрії до розв'язування задач……………....58
Література………………………………………………………………….…...71
4
Вступ
Ортогональні перетворення
Поняття про перетворення в геометрії виникло насамперед з розгляду
рухів. Особливістю ж рухів, найбільш важливою з точки зору геометрії, є
збереження величини і форми фігури. Рухома фігура в усі час руху зберігає
свою форму і розміри, вона така ж в кінці руху, як і на початку. Таким чином,
якщо брати тільки початковий і кінцевий моменти руху, то ми можемо
встановити відповідність між точками фігури в початковому і кінцевому її
положенні, при якому кожній точці М фігури F у початковому положенні
тіла ставиться у відповідність точка, у яку переходить точка М, коли фігура F
переміститься з початкового положення у кінцеве. При цьому, якщо точки М
і N фігури F перейдуть y точки М' і N', то відрізки MN і М' N'рівні між собою.
У геометрії під рухом розуміють не проце переміщення фігури, а
вказану вищще відповідність між точками фігури у початковому і кінцевому
її положенні. Такий підхід до справи дозволяє розглядати рух у геометрії як
відображення, що переводить кожен відрізок у рівний йому відрізок. І таке
відображення є найпростішим з геометричної точки зору, оскільки воно
зберігає як форму, так і розміри фігури, змінюючи лише її розташування.
Вивчення геометричних перетворень площини і простору ми почнемо з
вивчення такого виду найпростіших перетворень. Ми не будемо називати їх
рухами, а будемо застосовувати термін «ортогональні відображення» (і
перетворення), тому що, крім рухів; існують й інші перетворення, при яких
кожен відрізок переходить у відрізок, йому рівний (наприклад, симетрія).
При цьому і ортогональні відображення, і всі наступні геометричні
відображення і перетворення ми будемо вивчати, розглядаючи відображення
і перетворення всієї площини або всього простору. Перетворення і
відображення фігур ми будемо розглядати як такі, що задаються
відповідними перетвореннями і відображеннями.

5
Розділ 1. Перетворення фігур
1.1. Історико-філософські аспекти теми.
Ідея перетворень є однією з провідних ідей сучасної математики. За її
допомогою з успіхом доводять складні твердження з різних розділів
геометрії. За допомогою геометричних перетворень і комп'ютерної графіки
кінематографісти збагачують уяву глядача дивовижними образами і
незвичайними перевтіленнями на екрані. Перетворення допомагають
художникам правильно будувати композиції картин, а хімікам –
досліджувати структуру кристалів.
Теорія геометричних перетворень виникла у зв'язку з пізнанням законів
зображення предметів на площині. Спроби правильно відобразити на
плоскому рисунку природні форми предметів здійснювалися задовго до
виникнення писемності - люди малювали на стінах печер, скелях, посуді
різноманітні рослини, тварин тощо. Тривала практика підказувала митцям, як
передати на рисунку зображуваний предмет - так зароджувалося вчення про
відповідності й перетворення. Раніше за інші були встановлені й вивчені
закони перспективи. Стародавні греки дотримувалися їх уже в V – IV ст. до
н.е.
Поняття руху (переміщення) в геометрії сформувалось шляхом
абстракції реальних переміщень твердих тіл. Рух, як переміщення фігур і,
зокрема, накладання був основним методом доведення у Фалеса (640 – 548р.
до н.е.). Він відіграв також суттєву роль у напрацюваннях Евкліда. Так,
побудова прямих і кіл циркулем та лінійкою відбувається з допомогою руху.
Евклід визначає сферу як результат обертання півкола навколо діаметра.
Лінія – результат руху точки, поворот – результат руху лінії. Але Евклід не
дає означень як загального руху, так і обертання навколо точки чи навколо
осі, якими часто користується. Так залишалося до XVII століття, коли нові
запити природознавства і техніки змусили математиків зосередити свою
увагу на створенні методів, які б давали можливість математично визначати
6
рух, процеси зміни величин, геометричні перетворення фігур (наприклад, при
проектуванні тощо). Ці поняття не вкладалися у форми, вироблені
математиками стародавніх та середніх віків і вимагали для свого вираження
нових форм, чим були буквена алгебра і аналітична геометрія Декарта, а
разом з ними основи диференціального та інтегрального числення, які стали
потужним засобом дослідження явищ об’єктивної дійсності.
З цього часу предмет вивчення геометрії суттєво розширюється. Вона
починає вивчати рух і перетворення. При геометричних дослідженнях часто
потрібно було змінювати розміри фігури в одному і тому ж відношенні,
збільшувати радіуси кіл в одне і те ж число разів, взагалі, кажучи, ставити у
відповідність фігурам якого-небудь класу інші, які отримуються із них за
певними правилами. Такі відповідності стали називати перетвореннями
фігур. Довгий час методом дослідження цих перетворень був старий
«синтетичний» метод, тісно пов’язаний з евклідовою геометрією, де
міркування будуються на чисто геометричній основі незалежно від засобів
алгебри. Тому ця теорія була частиною так званого розділу елементарної
геометрії.
В Епоху Відродження з'явилися перші фундаментальні дослідження з
теорії перспективи, зокрема роботи видатних художників Леонардо да Вінчі
(1452-1519) і Альбрехта Дюрера (1471-1528). Розробником математичних
основ теорії проективних перетворень (теорії перспективи) став французький
інженер і архітектор Жерар Дезарг (1593-1662).
Завдяки теорії перспективи вдалося досягнути достатньої наочності
зображень, однак технічний прогрес вимагав точного відтворення об'єктів із
дотриманням розмірів. Багато талановитих учених доклали зусиль до
створення теорії взаємно однозначних відповідностей на площині й у
просторі. Серед них був, зокрема, французький математик Мішель Шаль
(1793-1880), який довів фундаментальну теорему про геометричні
перетворення (нині відому як теорема Шаля). Підсумував наукові пошуки в
7
галузі геометричних перетворень французький геометр Гаспар Монж (1746-
1818), створивши новий розділ геометрії - нарисну геометрію.
Надалі в теорії дослідження перетворень фігур починають з’являтись і
методи аналітичної геометрії. Це відбувалося тоді, коли від перетворення
фігур перейшли до перетворення площини, на яку почали дивитися як на
множину точок, а її геометричні перетворення задавати алгебраїчними
рівняннями в прямокутних координатах, використовуючи при цьому методи
алгебри.
В середині ХІХ ст. геометрія досягла значного розквіту. Був
нагромаджений об’ємний фактичний матеріал. На зміну єдиній аналітичній
геометрії прийшли різні «геометрії», які значною мірою розвивалися
незалежно одна від одної. Гостро стало питання про встановлення зв’язку та
спорідненості між ними. З’явилася настійна необхідність виробити загальну
точку зору на геометричний простір, знайти критерії, за якими можна було б
встановити, що є предметом вивчення тієї чи іншої геометрії, навести
порядок у величезному зібранні накопичених знань. Сприяли вирішенню цих
проблем дослідження з проективної геометрії, присвячені аналізу поведінки
фігур при різних перетвореннях, які поступово перейшли до вивчення самих
перетворень та їх класифікацій. Вгомий внесок у розвиток цих ідей зробили
німецький математик А.Мебіус (1790 – 1868) і англійський А.Келі (1821 –
1895). Заключним етапом на цьому шляху стала Ерлагенська програма (1872)
німецького математика Фелікса Клейна (1849 – 1925).
Ним були зроблені перші зусилля з використання геометрії
перетворень як основи геометрії. Майже протягом сторіччя такий підхід був
відомий лише серед математиків. У XX столітті були спроби використати
його для розвитку математичної освіти.
А. Колмогоров включив цей підхід (разом із теорією множин) як одну
із пропозицій щодо реформування викладання геометрії в Росії. Ці зусилля
завершилися у 1960-х роках із загальною реформою викладання математики,
відомою під назвою "Нова математика".
8
Теорія геометричних перетворень, яка виникла як узагальнення поняття
руху, використавши теорію точкових множин і елементи теорії групи,
суттєво вплинула на розуміння предмету геометрії. Подібно до того як метод
координат привів до злиття в єдине ціле геометрію, аналіз і алгебру, теорія
груп, по суті справи, об’єднує в одне ціле уже не тільки математичні, але і
інші природничі і навіть гуманітарні науки. Серед усіх видів геометричних
перетворень особливе місце займає осьова симетрія (від грецького summetria
– співрозмірність). Поясненням цього, напевно є те, що кожен рух на
площині можна подати як композицію (не більше трьох) осьових симетрій.
Різноманітні приклади симетричних фігур ми можемо спостерігати в
навколишньому світі, в техніці, в побуті, в різних науках. Так у мистецтві
симетрія відіграє роль єдиного із видів гармонійної композиції. Вона
властива всім творам архітектури. Симетрія використовується як основний
прийом при побудові бордюрів і орнаментів. У хімії більшість простих
молекул мають елементи просторової симетрії, наприклад, молекула метану
має симетрію тетраедра, амоніаку – правильної трикутної піраміди. При
створенні хімічних лазерів, при аналізі канцерогенних та фармакологічно
активних речовин тощо, враховується симетрія молекул. В біології зараз іде
інтенсивний розвиток галузевих наук про симетрію біологічних об’єктів, що
дозволяють поглибити наші уявлення про походження і сутність життя.
Симетрія фізичного простору часу дозволяє встановити закон збереження
імпульсу, моменту кількості руху, енергії, зарядів та інші. Симетрія відіграє
надзвичайно важливе значення у створенні атомних спектрів і класифікації
елементарних часток. Особливу роль відіграла симетрія у кристалографії.
Російський вчений Є.Ф.Федоров поставив перед собою завдання знайти всі
можливі види симетрії кристалів. Це одна з основних задач теорії
кристалографії.
Розв’язавши дедуктивним способом основну задачу кристалографії,
Є.С.Федоров разом з цим вніс величезний вклад у розвиток геометрії,
зокрема у розвиток теорії многогранників, як самостійного розділу геометрії.
9
Вивчення симетрії у повсякденному житті - це перший крок до
розуміння геометрії перетворень. Найпростішим перетворенням є симетрія
відносно осі. Композиція двох симетрій дозволяє обертати, коли лінії
перетинаються, або переміщувати об'єкт, коли лінії паралельні. З цих
перетворень можна вивести ізометрію евклідової площини (збереження кутів
і довжин).
Геометрія перетворень подає альтернативне бачення, контрастне з
класичною геометрією, і дозволяє відкрити шлях для аналітичної
геометрії чи лінійної алгебри (в якій розширено поняття симетрії). Дійсно,
можна також виразити геометрію перетворень завдяки складним числам,
комплексним або завдяки матрицям.
Широке застосування у практиці мають й інші геометричні
перетворення. Так, значна частина фізичних рухів (так звані поступальні
переміщення), які використовуються в різних механізмах, зводяться до
паралельного перенесення. За допомогою паралельного перенесення можна
розв’язувати багато практичних задач. Також у фізиці і техніці часто
знаходить застосування обертання - поворот як навколо точки, так і навколо
осі в просторі (існує теорія обертового руху, обертових спектрів тощо).
Вагоме значення теорії обертання в астрономії.
Властивості афінних перетворень широко застосовуються у різних
розділах математики, механіки і теоретичній фізиці: у геометрії - для афінної
класифікації фігур, у механіці - при вивченні малих деформацій
неперервного суспільного середовища, у теорії пружності - електричного і
магнітного полів, рідини тощо. При деформаціях малі елементи середовища у
першому наближенні підлягають афінним перетворенням.
Пізніше на основі розподілу геометричних перетворень на групи було
виділено ще декілька розділів геометрії - афінна, проективна та інші.
Здобутки вчених у вивченні перетворень склали математичну основу
розвитку багатьох галузей сучасної техніки.
10
Результати теорій геометричних перетворень, як і інших розділів
математики застосовуються до розв’язання важливих задач практики тому,
що в них описані властивості і закономірності реальних предметів і явищ
матеріального світу, і, що саме характерне, не одного якого-небудь предмету
чи явища, а надзвичайно великої їх кількості, які існують самостійно і
незалежно одне від одного і які разом з тим знаходяться між собою у
нерозривному діалектичному зв’язку.
Від геометрії Евкліда до створення теорії множин і теорії груп – все це
стрибки, якісні зміни у змісті теорії. Кожен такий стрибок підготовлений
попередніми знаннями і є їх своєрідним завершенням і продовженням. З
кожним таким кроком вперед математика наповнюється новими засобами
пізнання реального світу, набуває можливості глибше відображати світ.
Геометричні перетворення - дуже важливий розділ курсу геометрії. У
геометрії Евкліда, яку вивчаємо в курсі математики, переважно
досліджуються ті властивості геометричних фігур, що не змінюються при їх
русі (образно кажучи, кожну геометричну фігуру можна розглядати як
"тверду", наприклад, вирізану з картону), - симетрія та поворот, а також ті, де
відбувається перетворення подібності - гомотетія. Метод геометричних
перетворень є досить продуктивним методом розв'язування геометричних
задач. Математична теорія симетрії, симетрія у живій та неживій природі,
мистецтві, архітектурі, інженерії отримали спільне підґрунтя у геометричних
перетвореннях. У геометрії розглядають деякі функції, які мають різні
значення, вони кожній точці ставлять у відповідність точку. Ці функції
називаються геометричними перетвореннями. За їх допомогою визначають
такі важливі геометричні поняття, як рівність та подібність фігур.
У математиці геометрія перетворень - це спосіб вивчення геометрії,
зосереджуючись на групах геометричних перетворень та інваріантних до
них. Вона протистоїть класичному підходу до синтетичної геометрії
евклідової геометрії, що фокусується на геометричних конструкціях.
11
1.2. Поняття відображення фігур
З відображеннями доводиться часто стикатися на практиці: це й
демонстрація кінофільму, коли із зображень на кінострічці відображаються
кадри на екрані, і фотографування, зображення просторових фігур на
площині, різноманітні копіювання та інше.
У кожному з цих прикладів маємо перехід від однієї фігури до іншої,
при якому кожній точці першої фігури відповідає певна точка другої.
Означення 1.1. Відображенням фігури F у фігуру F' називається
така відповідність (встановлена за допомогою якого-небудь правила f), за
якої кожній точці М фігури F відповідає певна точка М' фігури F'.
Точку М' називають образом точки М у відображенні f і записують
М'=f (М), або f (М)=М'. Інколи відображення f точки М на точку М'
позначають стрілкою: М —f→ М' або f: М → М'. Точку М називають
прообразом точки М'.
На основі означення 1.1 стверджуємо, що відображення називається
заданим, якщо:
1) задана фігура F, яка відображається;
2) вказане правило f, за яким для кожної точки М є F можна знайти її
образ f(М) .
Означення 1.2. Відображення f, при якому кожна точка фігури F' є
образом хоча б однієї точки фігури F, тобто f(F) = F,' називається
сюр'єктивним відображенням або просто сюр'єкцією.
Означення 1.3. Відображення f фігури F на фігуру F' називається
взаємно однозначним, якщо різним точкам фігури F відповідають різні
точки фігури F'.
Прикладом взаємно однозначного відображення є відображення
півкола з діаметром АВ на відрізок АВ. Всі види переміщень, які

12
розглядаються у шкільному курсі геометрії, а також гомотетія і подібність,
є взаємно однозначними відображеннями.
Означення 1.4. Якщо маємо взаємнооднозначне відображення f фігури
F на фігуру F', то оберненим до f називається таке відображення f -1
фігури
F' на фігуру F, у якому кожній точці М' фігури F' ставиться у відповідність та
точка М фігури F, яка була її прообразом у відображенні f.
Очевидно, що коли f -1
- відображення, обернене f , то і f - відображення,
обернене до f -1
. Для відображення f існує обернене відображення f -1
тоді і
тільки тоді, коли відображення f взаємно однозначне.
1.3. Перетворення фігур
Поняття геометричного перетворення фігури вводиться на основі
взаємно однозначного відображення однієї фігури на іншу. В окремому
випадку фігуру F можна відобразити саму на себе.
Означення 1.5. Взаємно однозначне відображення фігури F на себе
називається перетворенням фігури F.
Окремим випадком фігури F є площина Р. Якщо взаємно однозначним
відображенням f кожній точці М площини Р ставиться у відповідність точка
М' цієї ж площини, то отримаємо відображення площини на себе, тобто
перетворення площини Р. Варто зауважити, що при перетворенні площини Р
кожна фігура F є Р відображається на якусь фігуру F' є Р. При цьому
можливий випадок, що якась одна або декілька точок фігури F
відображаються на себе. Така точка X фігури F, образ якої збігається з її
прообразом, називається подвійною, або незмінною точкою цього
перетворення.
При перетворенні фігури F можуть бути незмінними не лише окремі
точки, а й відрізки, кути, окремі властивості фігури F. Властивості фігури F,
які при всіх даних перетвореннях не змінюються, називаються
інваріантними.
13
Якщо при перетворенні f площини Р фігура F с Р відображається на
себе, тобто f(F)=F, то фігуру F називають інваріантною фігурою
перетворення f.
Розглядатимемо тільки такі відображення f фігури площини Р, які
відображають площину на себе, тобто перетворення f площини Р.
Поняття групи геометричних перетворень тісно пов'язане з поняттям
групи множини будь-яких елементів. Суть бінарної операції на множині М
полягає в тому, що кожній упорядкованій парі елементів (а, b) є М відповідає
елемент с є М. Бінарну операцію називають звичайно множенням (с = а * b)
або додаванням (с = а + b). Якщо треба підкреслити відмінність бінарної
операції від звичайного множення або додавання, то користуються іншими
символами операції: ◦, + i т.д.
Означення 1.6. Непорожня множина G елементів а, b, с,... називається
групою, якщо у цій множині:
- визначена операція ◦, яка ставить у відповідність кожній парі елементів
(а, b) із G деякий елемент с із G, тобто а ◦ b = с;
- операція ◦ асоціативна, тобто а ◦ (b ◦ с) = (а ◦ b) ◦ с для будь-яких а, b, с
із G;
- існує елемент e, нейтральний відносно операції ◦ , тобто такий, що
а ◦ е = е ◦ а = а для будь-якого а є G;
- для будь-якого елемента а є G існує такий елемент а-1
є G, що а ◦ а _1 = е.
Елемент а-1
називають оберненим до елемента а.
Аналогічно вводиться поняття групи геометричних перетворень.
Розглянемо множину Z геометричних перетворень f1, f2, f3, ... . За бінарну
операцію на множині Z приймемо композицію двох перетворень
f1 i f2, тобто кожній упорядкованій парі геометричних перетворень
(f1, f2) з Z відповідає нове геометричне перетворення f є Z таке, що f = f2 ◦ f1 .
Означення 1.7. Множина Z усіх геометричних перетворень фігури F
називається групою, якщо в цій множині:
1) композиція двох будь-яких перетворень множини Z є і
14
перетворенням цієї ж множини;
2) композиція перетворень асоціативна;
3) тотожне перетворення Е належить множині Z;
4) для кожного перетворення f множини Z існує обернене
перетворення f1.
Вказані в цьому означенні чотири умови називаються груповими
властивостями, або груповими аксіомами.
Щоб переконатися, що дана множина геометричних перетворень
утворює групу, треба довести виконання цих чотирьох властивостей на даній
множині. Неважко довести, що множина всіх перетворень площини утворює
групу. Групи перетворень площини, зокрема, утворюють: множина всіх
паралельних перенесень площини, множина всіх поворотів зі спільним
центром, множина всіх переміщень, множина всіх гомотетій зі спільним
центром, множини всіх подібних перетворень площини.
Найпростішим прикладом групи перетворень площини є група рухів.
Загальним поняттям «рух» об'єднуються такі відомі з курсу геометрії
середньої школи найпростіші перетворення площини, як паралельне
перенесення (вектор), поворот навколо точки, центральна, осьова симетрії, а
також їх композиції. Спільним для них всіх є те, що відстань між двома
точками не змінюється.
Означення 1.8. Перетворення площини, при якому відстань між будь-
якими двома точками дорівнює відстані між їх образами, називається рухом
(у деяких посібниках переміщенням).
На основі поняття руху вводиться поняття рівності фігур.
Означення 1.9. Якщо фігуру F можна відобразити на фігуру F' так, що
відстань між будь-якими точками фігури F дорівнюватиме відстані між
точками фігури F', які їм відповідають, то фігури F і F' називаються рівними.
З означень1.8 і 1.9 можемо констатувати, що:
- відповідні при русі фігури завжди рівні;
- образи двох будь-яких різних точок при русі також різні;
15
- рух є взаємно однозначним перетворенням площини;
- для кожного руху Р існує йому обернене перетворення, яке також є рухом і
позначається Р -1
.
Якщо А'В' = Р (АВ), то АВ = Р-1(А'В');
- композиція рухів Р і Р -1
є тотожним перетворенням, тобто Р -1
◦ Р = Е;
- композиція двох будь-яких рухів є рухом. Справді, нехай Р1 і Р2 - рухи,
кожен з них відображає площину на себе, тому й Р2 ◦ Р1 також відображає
площину на себе. Візьмемо М і N - дві довільні точки площини, і нехай
М1 = Р1 (М), N1 = Р1 (N), М2 = Р2(М1) і N2 = Р2(N1). Тоді отримуємо рівні
відрізки МN - М1N1 і М1N1 = М2N2, тобто МN = М2N2. Тому Р2 ◦ Р1 -
відображення площини на себе, при якому зберігаються відстані.
Отже, Р2 ◦ P1 = P - рух. Аналогічно переконуємось, що Р1 ◦ Р2 - також
рух;
- композиція рухів асоціативна.
Теорема 1.1. Множина всіх рухів площини є групою.
Доведення. Нехай Р1, Р2, Р3 - рухи, М - довільна точка площини і
М1 = Р1 (М), М2 = Р2 (М1), М3 = Р3 (М2). Тоді композиція Р2 ◦ P1 відображає точку М
на точку М2, а рух Р3 переводить точку М2 у М3, тобто Р3 ◦ (P2 ◦ P1) (M) = М3. З
іншого боку, рух Р1 відображає точку М на M 1, а композиція Р3 ◦ Р2 переводить
точку М1 у точку М3, тобто ((Р3 ◦ Р2) ◦ Р1) (М) = М3. Отже, Р3 ◦ (Р2 ◦ Р1) = (Р3 ◦
Р2) ◦ Р1 - композиція рухів має властивість асоціативності. Надалі, записуючи
композиції рухів, будемо опускати дужки, які показують порядок переміщень.
Розглянуті властивості є властивостями групи множини всіх рухів
площини, вони мають місце в множині рухів.
Отже, теорему доведено.
Розглянемо ще деякі властивості рухів.
1. Колінеарність точок є інваріантом групи рухів.
Справді, візьмемо три колінеарні точки А,В,С (належать одній прямій а),
з яких В лежить між А і С. Нехай їх образами при русі р є точки А', В', С. Тоді
маємо рівні відрізки: АВ = А'В', ВС = В'С', АС = A' С'.

16
За умовою АС = АВ + ВС, тому й А'С' = А' В' + В'С', тобто точка В'
лежить між точками А' і С'. Це означає, що А', В', С' - колінеарні.
2. Якщо точки А, В, С неколінеарні, то їх образи А' B', С' при русі
площини також неколінеарні.
3. Упорядкованість точок прямої є інваріантом групи рухів.
4. Образами прямої, відрізка, променя, кута є відповідно рівні їм пряма,
відрізок, промінь, кут.
5. Паралельність прямих є інваріантом групи рухів.
Введемо поняття орієнтації фігури на площині на прикладі трикутника.
Трикутник називається орієнтованим, якщо для нього вказано, яка вершина є
першою, яка другою, яка третьою. Для трикутника таких вказівок, очевидно,
буде дві: або за рухом стрілки годинника, або проти руху стрілки годинника.
Отже, будь-який трикутник може мати дві протилежні орієнтації.
Аналогічно поняття орієнтації вводиться для будь-якого опуклого
многокутника і будь-якої плоскої фігури, обмеженої замкненою ламаною
лінією без самоперетинів.
Відповідні при русі фігури рівні, але можуть мати однакові або
протилежні орієнтації, тому розглядають рухи двох родів. Рухи, які не
змінюють орієнтації фігури, називаються рухами першого роду. Це
тотожний рух, паралельне перенесення, поворот навколо точки, центральна
симетрія.
Рухи, які змінюють орієнтацію фігури на протилежну, називаються
рухами другого роду. Прикладом руху другого роду є осьова симетрія.
Зауважимо, що поняття орієнтації стосується фігур, які мають при-
наймні три неколінеарні точки. Тому говорити про орієнтацію відрізка,
променя, прямої не прийнято, вони мають напрям, а не орієнтацію.
17
1.4. Ортогональні відображення
Означення 1.10. Ортогональним відображенням площини л на площину
л' називається таке відображення, при якому кожен відрізок площини л
переходить у рівний йому відрізок.
Ортогональне відображення площини л на площину л' взаємнооднозначне.
Дійсно:
- двом різним точкам М1 і М2 площини л завжди відповідають дві різні
точки М1' і М2' площини л'; це випливає з того, що відрізок MlM2 дорівнює
відрізку Ml'M2';
- кожна точка М' площини л' має прообраз М у площині л. Справді:
візьмемо довільний трикутник АВС у площині л. Нехай А', В' і С' образи
точок А, В і С при розглянутому відображенні. Так як АВ = А'В ', АС = А'С' і
ВС = В'С', то точки .4 ', В' і С' є вершинами трикутника А'В'С ', рівного
трикутнику АВС. Візьмемо довільну точку М', яка не лежить принаймні на
одній з прямих А'В', В'С' і С'А'. Нехай точка М' не лежить на прямій А'В'.
Розглянемо трикутник А'В'М 'і трикутник А'В'М", де точка М", симетрична
точці М' відносно А'В'. Побудуємо в площині п два трикутники АВМ1 і
АВМ2, рівних трикутникам А'В'М' і А'В'М". Точка Ml розміщена від точок А
і В на відстанях М1A і М1В, значить образ точки М1 буде розміщений від
точок 4' і В' на тих же відстанях, тобто він буде збігатися або з точкою М' або
з точкою М ". Точно так же і образ точки М2 буде збігатися або з точкою М ',
або з точкою М". Нехай образ точки М1 збігається з точкою М". Тоді образ
точки М2 повинен співпасти з точкою М' , бо точки М1 і М2 мають різні
образи. Отже, точка М 'має прообраз. З доведеного випливає, що кожна точка
М' площини л' має, і до того ж тільки один, прообраз, а значить,
відображення, обернене до ортогонального, також є ортогональним.
Означення 1.11. Ортогональне відображення площини на себе
називається ортогональним перетворенням площини.
Відрізок будемо розглядати як пару точок - початок і кінець відрізка.
Рівність відрізків вважається поняттям елементарним, тобто не вводиться
18
його означення. Поняття рівності відрізків і кутів характеризується
відповідними аксіома елементарної геометрії.
Добуток двох будь-яких ортогональних перетворень є ортогональне
перетворення; перетворення, обернене до ортогонального, є також
ортогональним; одиничне перетворення площини - також є ортогональним.
Звідси випливає, що множина всіх ортогональних перетворень площини
утворює групу.
Аналогічно визначаються ортогональні перетворення простору.
Множина всіх ортогональних перетворень простору утворює групу.
1.5. Властивості ортогональних відображень
Теорема 1.2. При ортогональному відображенні довільні три точки, що
лежать на одній прямій, переходять у три точки, які також лежать на одній
прямій, а три точки, що не лежать на одній прямій, переходять у три точки,
які також не лежать на одній прямій.
Доведення. Нехай Р, Q, R - три точки, що лежать на одній прямій,
причому, наприклад, точка Q лежить між точками Р і R.
Тоді
Нехай точки Р, Q, R при ортогональному відображенні переходять
відповідно у точки Р', Q ', R '. Так як при ортогональному відображенні
довжини відрізків не змінюються, то P'Q'= PQ, Q'R' = QR, P'R '= PR, а тому
Отже, точки Р', Q ', R' лежать на одній прямій, оскільки, якщо б ці точки
не лежали на одній прямій, то ми мали б
Якщо точки Р, Q, і R не лежать на одній прямій, то їх образи Р', Q ' і R'
також не лежать на одній прямій. Оскільки, якби точки Р', Q ', R' лежали на
одній прямій, і, наприклад, точка Q ' лежала б між точками Р' і R', то
19
звідки слідувало б, в силу рівності відповідних відрізків при ортогональному
перетворенні, що
А це. суперечить припущенню про непрямолінійність розташування
точок Р, Q, R.
Теорема 1.3. При ортогональному відображенні площини л на
площину л' образом прямої I є пряма площини л'. Це означає, що будь-яка
пряма I площини п, що розглядається як безліч всіх її точок, відображається
взаємнооднозначно на всю пряму U площини л ', а не на її частину, тобто не
тільки кожній точці прямої I при цьому ортогональному відображенні
відповідає деяка точка прямої U, а й навпаки: кожна точка прямої I
відповідає певній точці прямої U.
Доведення. Нехай А і В - дві довільні точки, що лежать на прямій l, а
"А' і В' - їх образи; позначимо через l' пряму, що проходить через точки А' і В
'. Візьмемо довільну точку С на прямій l. В силу теореми образ С' точки С
лежить на прямій l'.
Таким чином, кожній точці С прямої I відповідає точка С прямої U.
Тепер візьмімо довільну точку М' на прямий U. Так як відображення,
обернене ортогональному, також ортогональне, то точка М' прямої 1' має
прообраз М в даному ортогональному перетворенні, розташований на прямій
l.
Ми довели, що пряма I відображається на пряму l ' «Взаємна
однозначність цього відображення випливає з взаємної однозначності
ортогонального відображення.
Пряма l' називається образом прямої l, а пряма I називається
прообразом прямої l' у розглянутому ортогональному відображенні площині
л на площину л'.
Теорема 1.4. При ортогональному перетворенні простору будь-яка
площина л ортогонально відображається на деяку площину л '.
20
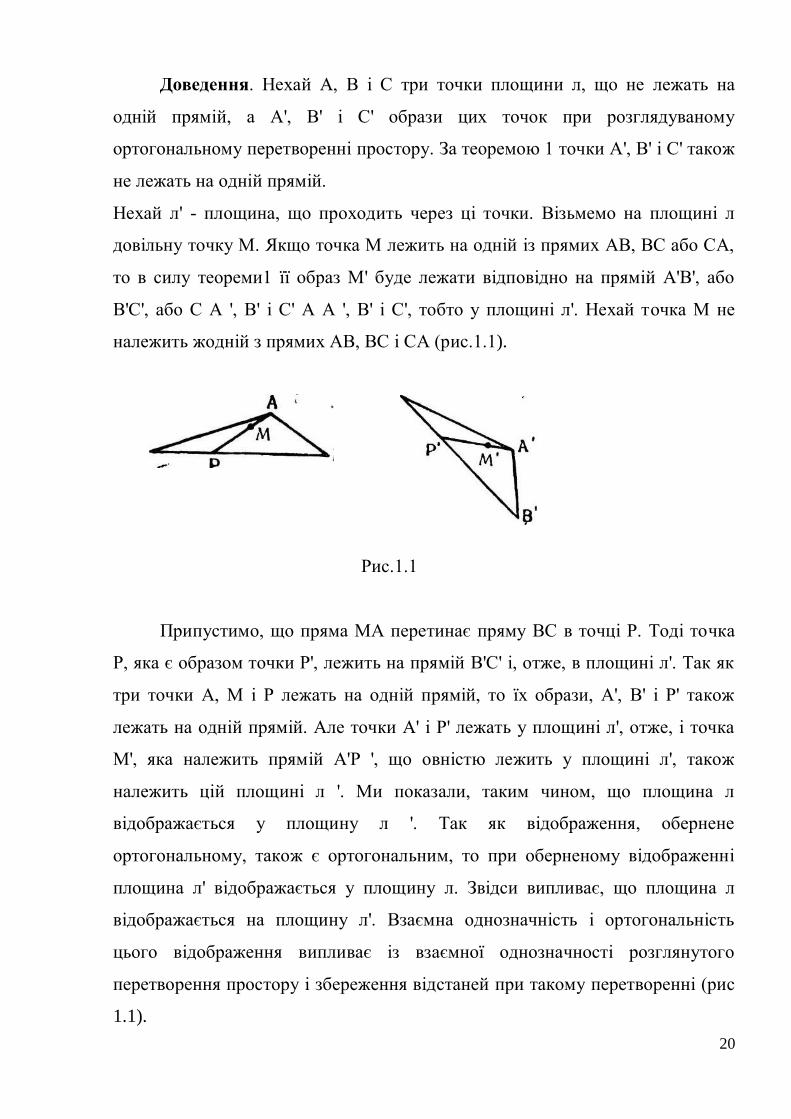
Доведення. Нехай А, В і С три точки площини л, що не лежать на
одній прямій, а А', В' і С' образи цих точок при розглядуваному
ортогональному перетворенні простору. За теоремою 1 точки А', В' і С' також
не лежать на одній прямій.
Нехай л' - площина, що проходить через ці точки. Візьмемо на площині л
довільну точку М. Якщо точка М лежить на одній із прямих АВ, ВС або СА,
то в силу теореми1 її образ М' буде лежати відповідно на прямій А'В', або
В'С', або С А ', В' і С' А А ', В' і С', тобто у площині л'. Нехай точка М не
належить жодній з прямих АВ, ВС і СА (рис.1.1).
Рис.1.1
Припустимо, що пряма МА перетинає пряму ВС в точці Р. Тоді точка
Р, яка є образом точки Р', лежить на прямій В'С' і, отже, в площині л'. Так як
три точки А, М і Р лежать на одній прямій, то їх образи, А', В' і Р' також
лежать на одній прямій. Але точки А' і Р' лежать у площині л', отже, і точка
М', яка належить прямій А'Р ', що овністю лежить у площині л', також
належить цій площині л '. Ми показали, таким чином, що площина л
відображається у площину л '. Так як відображення, обернене
ортогональному, також є ортогональним, то при оберненому відображенні
площина л' відображається у площину л. Звідси випливає, що площина л
відображається на площину л'. Взаємна однозначність і ортогональність
цього відображення випливає із взаємної однозначності розглянутого
перетворення простору і збереження відстаней при такому перетворенні (рис
1.1).
21
Теорема 1.5. При ортогональному відображенні площини л на
площину л' дві паралельні прямі площини л переходять у дві паралельні
прямі площини л'.
Доведення. Дві паралельні прямі площини л перейдуть, в силу теореми
2, у дві прямі площині л '. Ці останні не матимуть жодної спільної точки в
силу взаємної однозначності відображення площини л на площину л', тобто
будуть паралельні.
Теорема 1.6. При ортогональному перетворенні простору:
1) дві паралельні прямі переходять у дві паралельні прямі;
2) дві паралельні площини переходять у дві паралельні площини;
З) паралельні площина і пряма переходять відповідно у паралельні площину і
пряму.
Довести ці твердження пропонуємо студентам самостійно.
Теорема 1.7. При ортогональному відображенні порядок точок на
прямій зберігається, тобто внутрішні точки відрізка PR переходять у
внутрішні точки відрізка P'R ', що є образом даного відрізка PR, а точки
прямої PR, зовнішні по відношенню до відрізка PR, переходять у точки
прямої P'R', зовнішні по відношенню до відрізка P'R '.
Доведення. Нехай Q - довільна внутрішня точка відрізка PR. Тоді PQ +
QR = PR, отже, P'Q' + Q'R' = P'R', де Q', R'- відповідно образи точок Р, Q, R
при даному відображенні. Звідси випливає, що точка Q' - внутрішня точка
відрізка P'R'. Точно так же прообраз Q будь-якої внутрішньої точки Q'
відрізка P'R' є внутрішньою точкою відрізка PR. Таким чином, відрізок PR
разом з усіма своїми внутрішніми точками відображається
взаємнооднозначно на відрізок P'R' разом з усіма його внутрішніми точками.
Звідси випливає, що точки прямої PR, зовнішні по відношенню до відрізка
PR, переходять у точки прямої P'R ', зовнішні по відношенню до відрізка P'R'.
Наслідок. Якщо точки Р і Q лежать по різні боки від прямої l, то їх
образи Р' і Q' лежать також по різні боки від прямої l ', яка є образом прямої l.
22
Це випливає з того, що внутрішня точка R відрізка PQ, який лежить на
прямій l, перейде у внутрішню точку відрізка P'Q ', що лежить на прямій l '.
Якщо точки Р і Q лежать по один бік від прямої Т, то їх образи Р ' і Q ' лежать
також по один бік від прямої U.
Теорема 1.8. При ортогональних відображеннях кути зберігаються.
Доведення. Нехай а і Ь - два промені, що виходять, з точки О.
Візьмемо на променях а й Ь відповідно точки А і В, відмінні від точки О.
Нехай 0 ', А', В' - образи точок О, А і В відповідно при ортогональному
відображенні. Тоді промені 0 'А' та О'В ' будуть відповідно образами
променів а й Ь (теорема 6).
В силу ортогональності відображення трикутники ОАВ і О'А'В ' рівні,
як трикутники з відповідно рівними сторонами. Отже, кут між променями
ОА і ОВ дорівнює куту між променями О'А 'і О'В'. Що й потрібно було
довести.
Теорема 1.9. Нехай А, В, С - три довільні точки площині л, що не
лежать на одній прямій, а А ', В, С' - три точки площини л ' такі, що А'В' =
АВ, В'С ' = ВС, С'А'= СА. Тоді існує і до того ж і тільки одне ортогональне
відображення площини л на площину л ', яке переводить точки А, В, і С
відповідно в точки, А ', В' і С'.
Доведення. Побудуємо відображення площині п на площину л ' у
такий спосіб: точкам А, В, і С поставимо у відповідність точки А ', В' і С',
точці Р прямої АС поставимо у відповідність точку Р ' прямої А'С' з
дотриманням наступних умов: якщо точка Р лежить на промені АС, то
відповідну їй точку Р ' беремо на промені А'С' так, щоб А'Р '= АР, а якщо
точка Р лежить на продовженні променя АС за точку А, то і точку Р '
візьмемо на продовженні променя А'С' за точку А' так, щоб знову виконалась
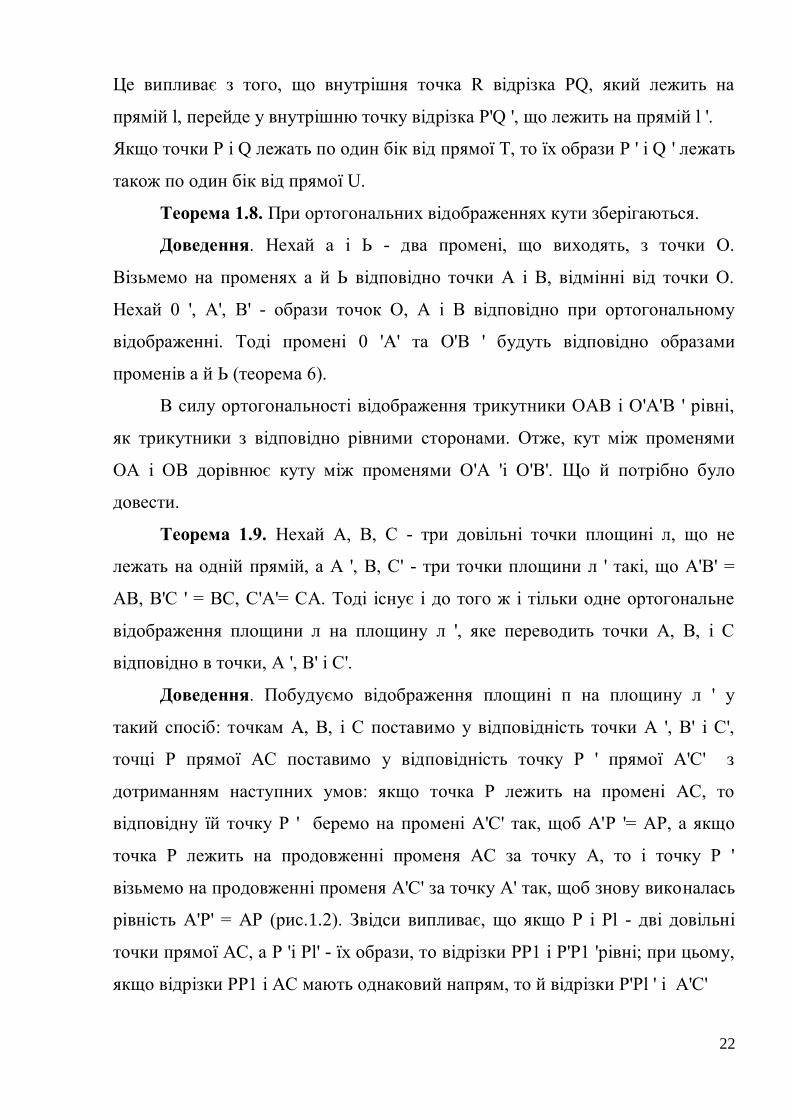
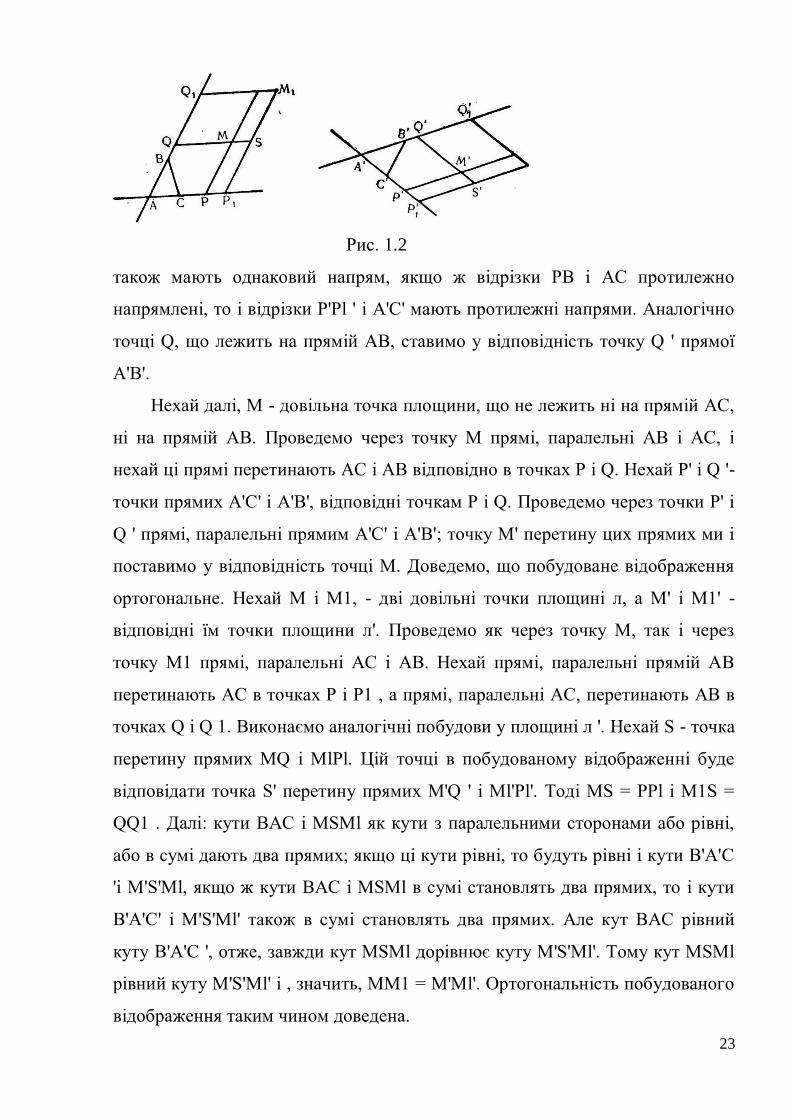
рівність А'Р' = АР (рис.1.2). Звідси випливає, що якщо Р і Pl - дві довільні
точки прямої АС, а Р 'і Pl' - їх образи, то відрізки РР1 і Р'Р1 'рівні; при цьому,
якщо відрізки РР1 і АС мають однаковий напрям, то й відрізки P'Pl ' і А'С'
23
Рис. 1.2
також мають однаковий напрям, якщо ж відрізки РВ і АС протилежно
напрямлені, то і відрізки P'Pl ' і А'С' мають протилежні напрями. Аналогічно
точці Q, що лежить на прямій АВ, ставимо у відповідність точку Q ' прямої
А'В'.
Нехай далі, М - довільна точка площини, що не лежить ні на прямій АС,
ні на прямій АВ. Проведемо через точку М прямі, паралельні АВ і АС, і
нехай ці прямі перетинають АС і АВ відповідно в точках Р і Q. Нехай Р' і Q '-
точки прямих А'С' і А'В', відповідні точкам Р і Q. Проведемо через точки Р' і
Q ' прямі, паралельні прямим А'С' і А'В'; точку М' перетину цих прямих ми і
поставимо у відповідність точці М. Доведемо, що побудоване відображення
ортогональне. Нехай М і М1, - дві довільні точки площині л, а М' і М1' -
відповідні їм точки площини л'. Проведемо як через точку М, так і через
точку М1 прямі, паралельні АС і АВ. Нехай прямі, паралельні прямій АВ
перетинають АС в точках Р і Р1 , а прямі, паралельні АС, перетинають АВ в
точках Q і Q 1. Виконаємо аналогічні побудови у площині л '. Нехай S - точка
перетину прямих MQ і MlPl. Цій точці в побудованому відображенні буде
відповідати точка S' перетину прямих M'Q ' і Ml'Pl'. Тоді MS = PPl і M1S =
QQ1 . Далі: кути ВАС і MSMl як кути з паралельними сторонами або рівні,
або в сумі дають два прямих; якщо ці кути рівні, то будуть рівні і кути В'А'С
'і M'S'Ml, якщо ж кути ВАС і MSMl в сумі становлять два прямих, то і кути
В'А'С' і M'S'Ml' також в сумі становлять два прямих. Але кут BAC рівний
куту B'A'C ', отже, завжди кут MSMl дорівнює куту M'S'Ml'. Тому кут MSMl
рівний куту M'S'Ml' і , значить, ММ1 = M'Ml'. Ортогональність побудованого
відображення таким чином доведена.
24
Ми довели, що існує ортогональне відображення, яке точки А, В і С
переводить у точки А', В' і С'. Залишається довести єдиність такого
відображення. Припустимо, що деяким ортогональним відображенням точки
А, В, С переводяться відповідно у точки, А ', В', С'. Тоді, на основі
властивостей ортогонального відображення будь-яка точка Р променя АС
перейде у точку Р' променя А'С' таку, що АР = А'Р', а будь-яка точка Р, що
лежить на продовженні променя АС за точку А, перейде у точку Р', що
лежить на продовженні променя А'С' за точку А' і таку, що А'Р' = АР.
Аналогічно відображаються рочки прямої АВ у точки прямої А'В '. Нехай,
нарешті, М - довільна точка площини, що не лежить на жодній з прямих АС і
АВ, а Р і Q - точки перетину з АС і АВ прямих, що проходять через точку М
паралельно АВ і АС. Нехай М * - образ точки М в даному ортогональному
відображенні, а Р 'і Q' - образи точок Р і Q. Так як РМ п АВ, то Р'М' llA'B', а
так як QM ІІ АС, то Q'М * ІІ А'С' (теорема 4). Ми бачимо, що образ М *
точки М є та точка М', яка в першій частині теореми при побудові
ортогонального перетворення відповідала точці М. Єдиність ортогонального
відображення, що переводить точки А, В, С у точки А', В', С', доведена.
1.6. Орієнтація
Для більш детального дослідження геометричних властивостей
ортогональних перетворень і встановлення зв'язку їх з поняттям руху нам
потрібно буде ввести важливе геометричне поняття орієнтації. Наочний зміст
його полягає у порівнянні двох фігур, межам яких визначено певний напрям
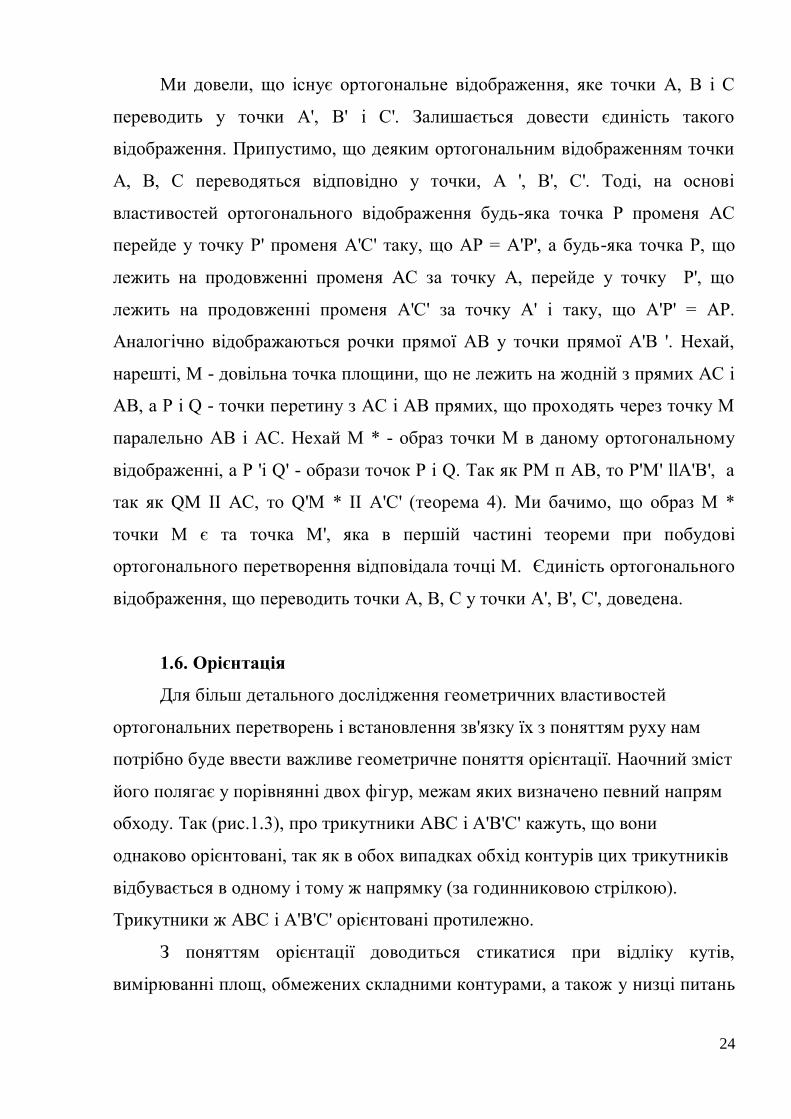
обходу. Так (рис.1.3), про трикутники АВС і А'В'С' кажуть, що вони
однаково орієнтовані, так як в обох випадках обхід контурів цих трикутників
відбувається в одному і тому ж напрямку (за годинниковою стрілкою).
Трикутники ж АВС і А'В'С' орієнтовані протилежно.
З поняттям орієнтації доводиться стикатися при відліку кутів,
вимірюванні площ, обмежених складними контурами, а також у низці питань
25
вищої математики. Сформулюємо математичне означення поняття
орієнтації.
Означення 1.12. Орієнтованим трикутником називаеться
впорядкована трійка точок (вершини трикутника), що не лежать на одній
прямій, тобто трійка точок, для якої визначено.
Рис.1.3
Яка з точок вважається першою, яка другою і яка третьою?
При позначенні орієнтованого трикутника порядок його вершин
визначається порядком їх запису.
Означення 1.13. Ланцюгом трикутників, що з'єднують орієнтований
трикутник АВС з орієнтованим трикутником А'В'С' називається кінцева
послідовність орієнтованих трикутників, першим елементом якої є
орієнтований трикутник АВС, останнім - орієнтований трикутник А'В'С' і
така, що кожні два сусідні трикутники цієї послідовності відрізняються або
тільки порядком вершин, або тільки однією вершиною, що має в обох
трикутниках один і той же номер. Теорема 1. Будь-які два орієнтованих
трикутники АВС і А'В'С ' можна з'єднати ланцюгом.
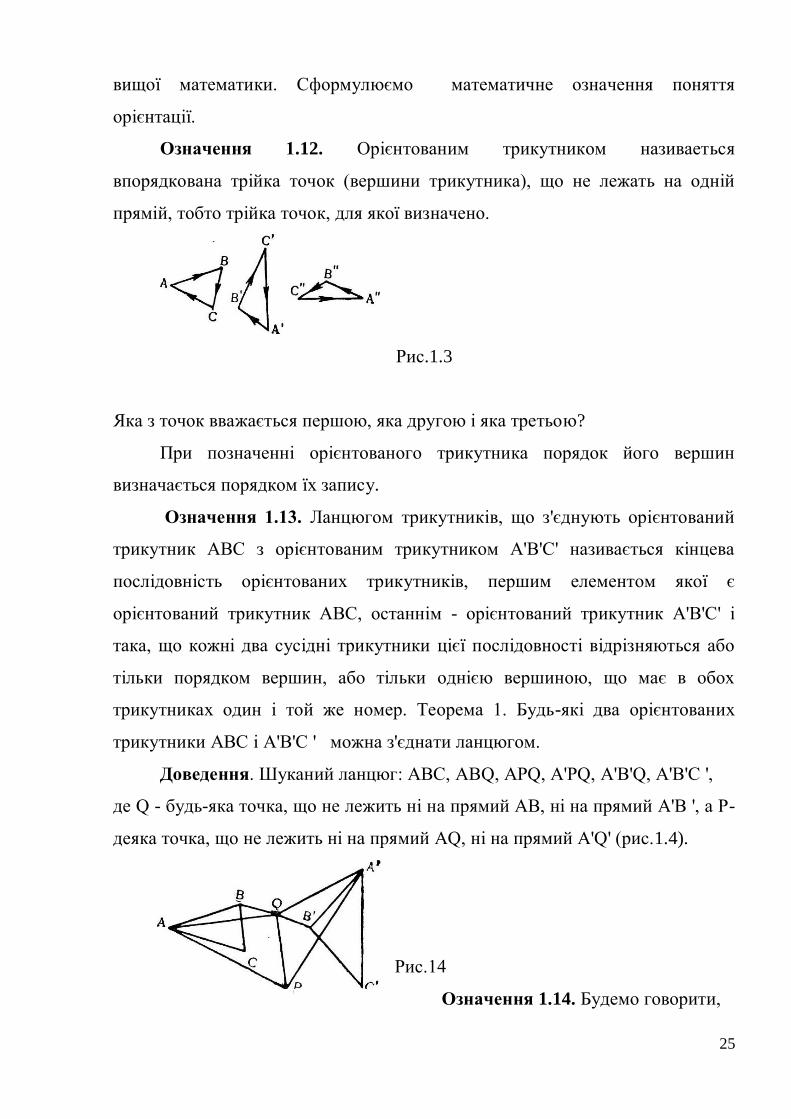
Доведення. Шуканий ланцюг: АВС, ABQ, APQ, A'PQ, A'B'Q, А'В'С ',
де Q - будь-яка точка, що не лежить ні на прямий АВ, ні на прямий А'В ', а Р-
деяка точка, що не лежить ні на прямий AQ, ні на прямий A'Q' (рис.1.4).
Рис.14
Означення 1.14. Будемо говорити, р с
26
що два орієнтованих трикутники з одними і тими ж вершинами мають
однаковий обхід, якщо вершини другого трикутника отримуються в
результаті кругової перестановки вершин першого трикутника. Якщо ж
вершини другого трикутника не можуть бути отримані круговою
перестановкою вершин першого, то будемо говорити, що ці трикутники
мають протилежний обхід.
Таким чином, трикутники АВС, ВСА і САВ мають однаковий обхід;
трикутники АВС, СВА і ВАС також мають однаковий обхід, а кожен з них з
будь-яким з трикутників АВС, ВСА і САВ мають протилежний обхід.
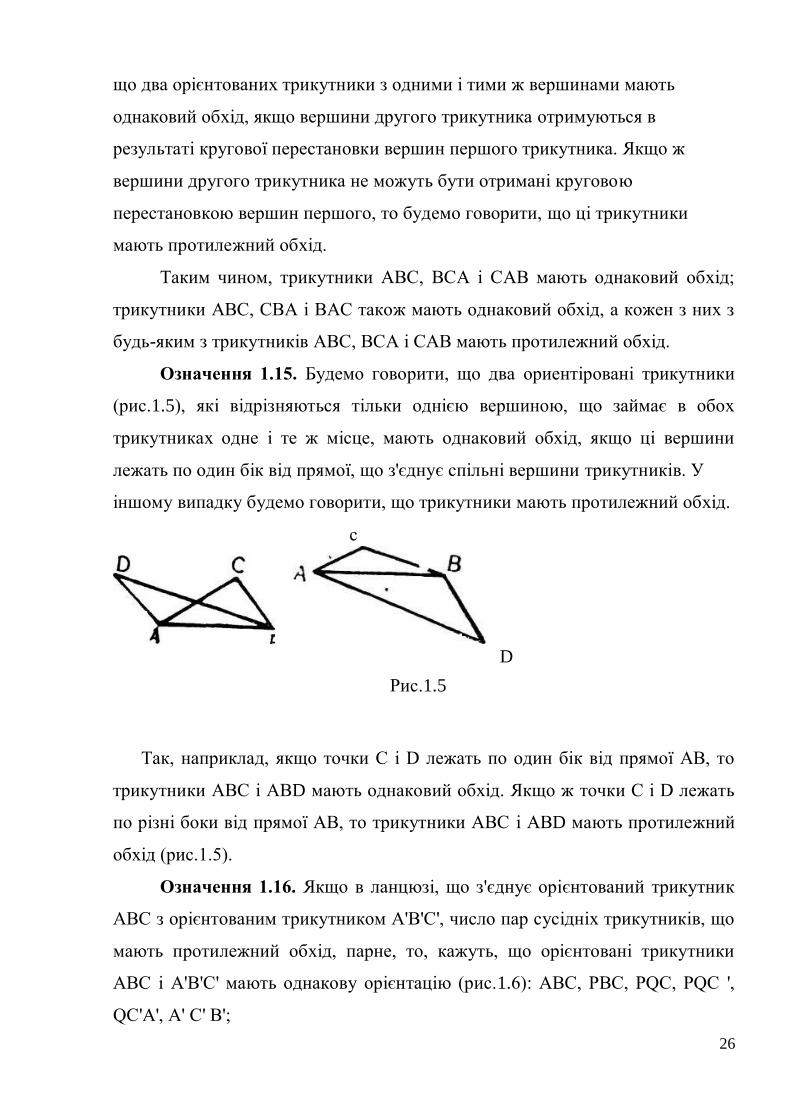
Означення 1.15. Будемо говорити, що два ориентіровані трикутники
(рис.1.5), які відрізняються тільки однією вершиною, що займає в обох
трикутниках одне і те ж місце, мають однаковий обхід, якщо ці вершини
лежать по один бік від прямої, що з'єднує спільні вершини трикутників. У
іншому випадку будемо говорити, що трикутники мають протилежний обхід.
с
D
Рис.1.5
Так, наприклад, якщо точки С і D лежать по один бік від прямої АВ, то
трикутники АВС і АВD мають однаковий обхід. Якщо ж точки С і D лежать
по різні боки від прямої АВ, то трикутники АВС і АВD мають протилежний
обхід (рис.1.5).
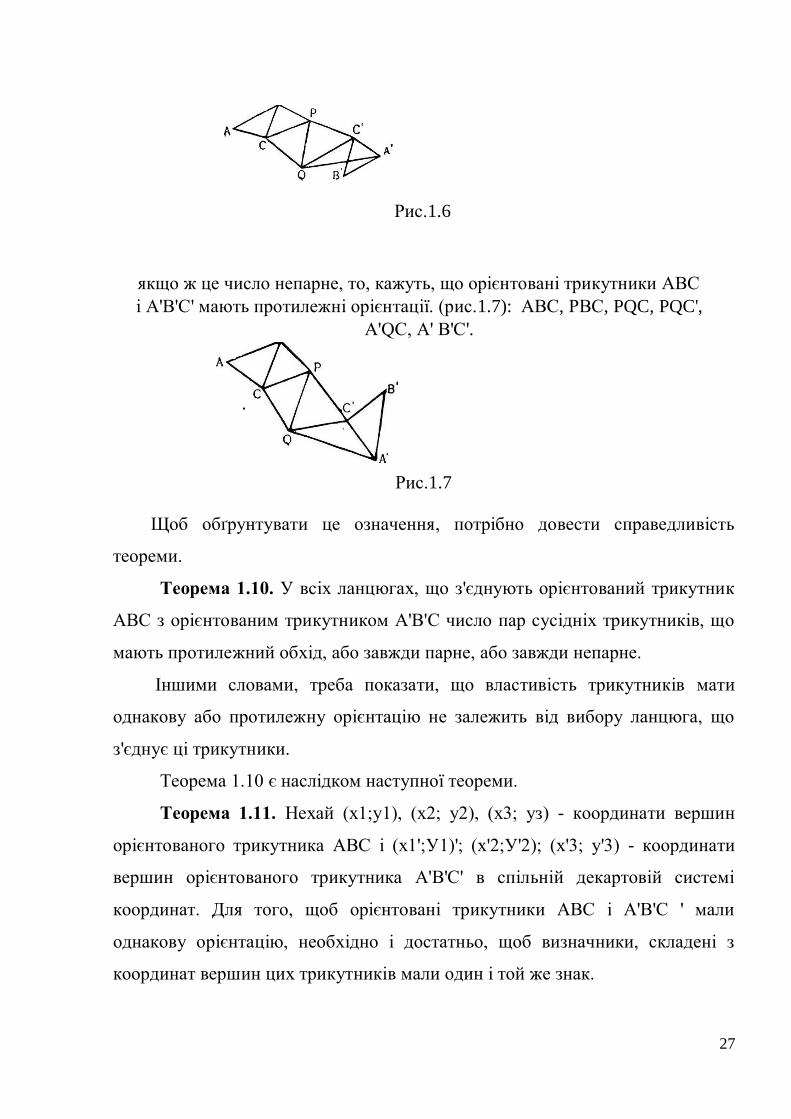
Означення 1.16. Якщо в ланцюзі, що з'єднує орієнтований трикутник
АВС з орієнтованим трикутником А'В'С', число пар сусідніх трикутників, що
мають протилежний обхід, парне, то, кажуть, що орієнтовані трикутники
АВС і А'В'С' мають однакову орієнтацію (рис.1.6): АВС, РВС, PQC, PQC ',
QC'А', А' C' В';
27
Рис.1.6
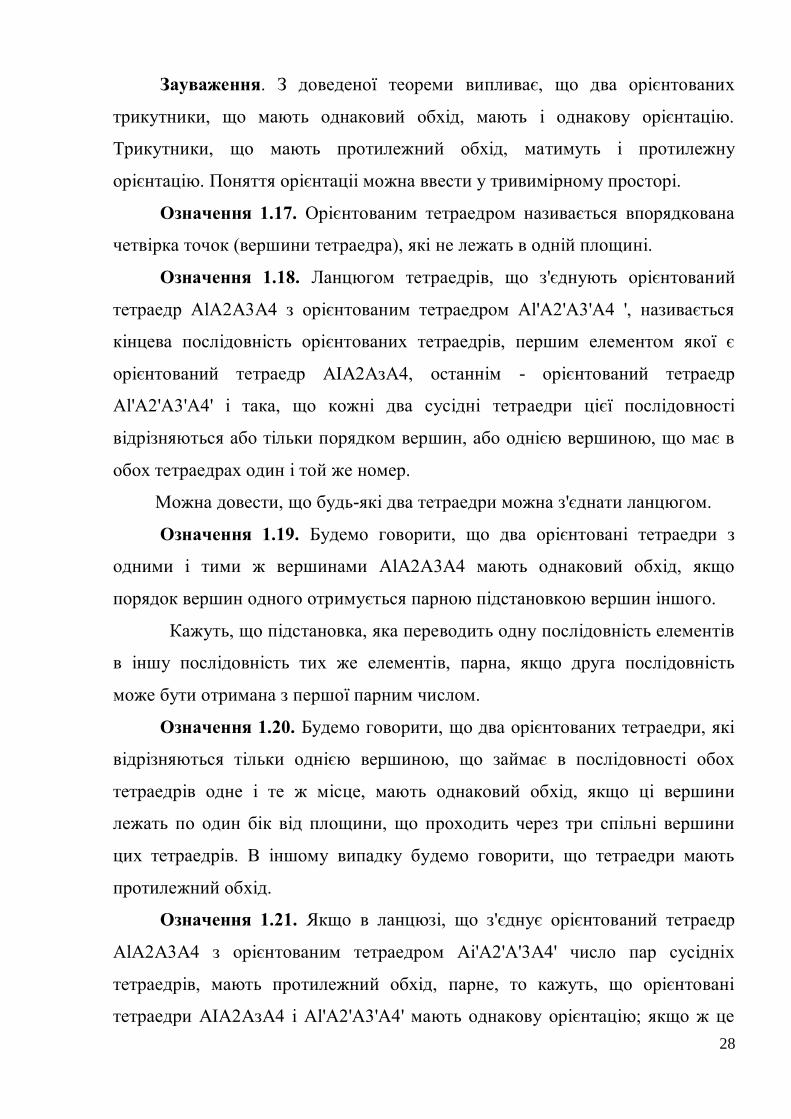
якщо ж це число непарне, то, кажуть, що орієнтовані трикутники АВС
і А'В'С' мають протилежні орієнтації. (рис.1.7): АВС, РВС, PQC, PQC',
A'QC, А' В'С'.
Рис.1.7
Щоб обґрунтувати це означення, потрібно довести справедливість
теореми.
Теорема 1.10. У всіх ланцюгах, що з'єднують орієнтований трикутник
АВС з орієнтованим трикутником А'В'С число пар сусідніх трикутників, що
мають протилежний обхід, або завжди парне, або завжди непарне.
Іншими словами, треба показати, що властивість трикутників мати
однакову або протилежну орієнтацію не залежить від вибору ланцюга, що
з'єднує ці трикутники.
Теорема 1.10 є наслідком наступної теореми.
Теорема 1.11. Нехай (х1;у1), (х2; у2), (х3; уз) - координати вершин
орієнтованого трикутника АВС і (х1';У1)'; (х'2;У'2); (х'3; у'3) - координати
вершин орієнтованого трикутника А'В'С' в спільній декартовій системі
координат. Для того, щоб орієнтовані трикутники АВС і А'В'С ' мали
однакову орієнтацію, необхідно і достатньо, щоб визначники, складені з
координат вершин цих трикутників мали один і той же знак.
28
Зауваження. З доведеної теореми випливає, що два орієнтованих
трикутники, що мають однаковий обхід, мають і однакову орієнтацію.
Трикутники, що мають протилежний обхід, матимуть і протилежну
орієнтацію. Поняття орієнтаціі можна ввести у тривимірному просторі.
Означення 1.17. Орієнтованим тетраедром називається впорядкована
четвірка точок (вершини тетраедра), які не лежать в одній площині.
Означення 1.18. Ланцюгом тетраедрів, що з'єднують орієнтований
тетраедр AlA2A3A4 з орієнтованим тетраедром Al'A2'A3'A4 ', називається
кінцева послідовність орієнтованих тетраедрів, першим елементом якої є
орієнтований тетраедр АIА2АзА4, останнім - орієнтований тетраедр
Al'A2'A3'A4' і така, що кожні два сусідні тетраедри цієї послідовності
відрізняються або тільки порядком вершин, або однією вершиною, що має в
обох тетраедрах один і той же номер.
Можна довести, що будь-які два тетраедри можна з'єднати ланцюгом.
Означення 1.19. Будемо говорити, що два орієнтовані тетраедри з
одними і тими ж вершинами AlA2A3A4 мають однаковий обхід, якщо
порядок вершин одного отримується парною підстановкою вершин іншого.
Кажуть, що підстановка, яка переводить одну послідовність елементів
в іншу послідовність тих же елементів, парна, якщо друга послідовність
може бути отримана з першої парним числом.
Означення 1.20. Будемо говорити, що два орієнтованих тетраедри, які
відрізняються тільки однією вершиною, що займає в послідовності обох
тетраедрів одне і те ж місце, мають однаковий обхід, якщо ці вершини
лежать по один бік від площини, що проходить через три спільні вершини
цих тетраедрів. В іншому випадку будемо говорити, що тетраедри мають
протилежний обхід.
Означення 1.21. Якщо в ланцюзі, що з'єднує орієнтований тетраедр
AlA2A3A4 з орієнтованим тетраедром Ai'A2'A'3A4' число пар сусідніх
тетраедрів, мають протилежний обхід, парне, то кажуть, що орієнтовані
тетраедри АIА2АзА4 і Al'A2'A3'A4' мають однакову орієнтацію; якщо ж це
29
число непарне, то кажуть, що орієнтовані тетраедри мають протилежну
орієнтацію.
Це означення обґрунтовується наступною теоремою, яка доводиться
аналогічно теоремі 2 цього пункту, тобто доведення спирається на
властивості визначників: в усіх ланцюгах, що з'єднують орієнтований
тетраедр AlA2A3A4 з орієнтованим тетраедром Al'A2'А3'А4', число пар
сусідніх тетраедрів ланцюга, що мають протилежний обхід, або завжди
парне, або завжди непарне.
Наведене означення орієнтації тривимірного евклідового простору
узагальнюється на випадок п-вимірного евклідового простору.
1.7. Ортогональні перетворення першого і другого роду
Теорема 1.12. Якщо який-небудь трикутник АВС і його образ А'В'С
'при ортогональному перетворенні площині мають однакову орієнтацію, то
однакову орієнтацію мають будь-який трикутник PQR і його образ P'Q'R' при
цьому ортогональному перетворенні. Якщо ж трикутники АВС і А'В'С'
мають протилежну орієнтацію, то і трикутники PQR і P'Q'R' мають
протилежну орієнтацію.
Доведення. Нехай трикутники АВС і А'В'С' мають однакову
орієнтацію. Доведемо, що трикутники PQR і P'Q'R' також мають однакову
орієнтацію. Нехай, наприклад, трикутники АВС і PQR мають однакову
орієнтацію. З'єднаємо їх ланцюгом. Число пар сусідніх трикутників у цьому
ланцюзі, що мають протилежний обхід, буде парним. Після ортогонального
перетворення цей ланцюг відобразиться у ланцюг, що з'єднує трикутник
А'В'С' з трикутником P'Q'R'. У останньому ланцюгу число пар сусідніх
трикутників, що мають протилежний обхід, буде тим же самим, що і в
першому ланцюжку, тобто також буде парним (S 5, наслідок з теореми 6).
Значить трикутники А'В'С 'і P'Q'R' мають однакову орієнтацію, а тому й
трикутники PQR і P'Q'R' мають однакову орієнтацію. Якщо ж трикутники
АВС і PQR мають протилежну орієнтацію, тобто число пар сусідніх
30
трикутників ланцюга, що з'єднує АВС і PQR протилежного обходу, непарне,
то і число пар сусідніх трикутників ланцюга, що з'єднує А'В'С 'і P'Q'R
протилежного обходу, в яку відображається ланцюг, що з'єднує АВС і PQR,
також непарне, тобто А'В'С' і P'Q'R' мають протилежну орієнтацію. Звідси
випливає, що трикутники PQR і P'Q'R' мають однакову орієнтацію.
Аналогічно доводиться друга частина теореми.
Означення 1.22. Ортогональное перетворення називається
ортогональним перетворенням першого роду, якщо це перетворення зберігає
орієнтацію будь-якого трикутника. Якщо ж орієнтація змінюється на
протилежну, то ортогональное перетворення називається ортогональним
перетворенням другого роду *
Означення 1.23. Ортогональне перетворення першого роду
називається рухом.
Зазвичай рух у механіці і фізиці розглядається як процес, у результаті
якого тіло переходить з одного стану в інший. У процесі руху весь час
зберігаються довжини відрізків і величини кутів, а також орієнтація. У ряді
питань геометрії нас цікавлять лише початковий і кінцевий положення тіла.
Тому рух в геометрії найчастіше означається як таке перетворення, яке
зберігає довжини відрізків та орієнтацію, тобто як ортогональне
перетворення першого роду. Сукупність усіх рухів є підгрупа групи всіх
ортогональних перетворень.
Таким чином, добуток двох ортогональних перетворень першого роду є
ортогональне перетворення першого роду.
Зауважимо, що добуток ортогонального перетворення першого роду
на ортогональне перетворення другого роду є ортогональне перетворення
другого роду; добуток же двох ортогональних перетворень другого роду є
перетворенням першого роду. Звідси випливає, що множина ортогональних
перетворень другого роду не є групою.
Вище ми довели, що якщо А, В і С три довільні точки площини, що не
лежать на одній прямій, а А ', В ' і С ' точки тієї ж площини такі, що АВ =
31
А'В' , ВС = В'С ', СА = С'А', то існує і до того ж тільки одне ортогональне
перетворення, яке точки А, В, С переводить у точки А', В', С '. Тепер ми
можемо довести наступну теорему.
Теорема 1.13. Існує і до того ж тільки одне ортогональне перетворення
першого роду, яке дві точки А і В переводить відповідно у точки А ', В' такі,
що АВ = А'В '.
Існує і до того ж тільки одне ортогональне перетворення другого роду, яке
дві точки А і В переводить відповідно у точки А ', В' такі, що АВ = А'В '.
Доведення. Візьмемо довільну точку С, що не лежить на прямій АВ.
Існує трикутник А'В'С', рівний і однаково орієнтований з трикутником АВС.
Існує ортогональне перетворення, яке точки А, В, С переводить відповідно у
точки А', В'. Це перетворення першого роду, так як трикутник АВС
переходить у трикутник А'В'С', однаково орієнтований з трикутником АВС.
Будь-яке ортогональне перетворення першого роду, що переводить точки А і
В відповідно у точки А', В', переведе точку С в точку С', так як існує тільки
один трикутник А'В'С', рівний і однаково орієнтований з трикутником АВС.
Але ортогональне перетворення, що переводить три точки А, В, С в точки
А',В',С', визначається однозначно, отже, це - єдине перетворення першого
роду, що переводить точки А і В відповідно в точки А' і В'. Повністю
аналогічно доводиться існування і єдиність ортогонального перетворення
другого роду, яке переводить точки А і В відповідно у точки А' і В' такі, що
АВ = А'В '.
Основними видами ортогональних перетворень є перенесення,
симетрія, поворот, які ми детально розглянемо у наступних розділах.

32
Розділ 2. Паралельне перенесення площини
2.1. Паралельне перенесення і вектор
Означення 2.1. Нехай – деякий вектор площини. Перетворення
площини, при якому кожна її точка М площини відображається на таку точку
М΄ цієї ж площини, що = , називається паралельним перенесенням.
Паралельне перенесення на вектор а позначають символом Тa ( від
латинського слова translation - перенесення) або просто а. Паралельне
перенесення ще називати трансляцією.
Точка М' називається образом точки М при паралельному перенесенні,
символічно це записується так: М' =Тa (М) або М' = а(М) (рис.2.1).
Теорема 2.1. Паралельне перенесення площини однозначно
визначається заданням однієї пари відповідних точок.
Доведення. Нехай паралельне перенесення відображає точку А на
точку А' таку, що
= (1)
Покажемо, що не існує іншого паралельного перенесення, у якому
образом точки А була б та сама точка А'. Припустимо супротивне: нехай
існує інше паралельне перенесення b, при якому А' =b(А), тоді
= . (2)
Образом довільної точки М площини у перетворенні й буде точка М'
така,що
= (3)
а в перетворенні b - точка М", для якої
ММ" = . (4)
З рівностей (1), (2), (3), (4) маємо, що = ММ" ,тобто точки М' і М"
збігаються. Отже, перетворення а і b не різні, бо образом довільної точки М в
обох цих перетвореннях є одна й та ж точка М'.

Наслідок 1. Оскільки упорядкована пара точок (М,М') однозначно
визначає вектор , то можна сказати, що паралельне перенесення
повністю визначається заданням вектора ΄,який називають вектором
переміщення.
Для побудови образа будь-якої точки В площини в паралельному
перенесенні, заданому упорядкованою парою відповідних точок (А,А΄), треба
від точки В відкласти вектор = . Операція відкладання даного
вектора від даної точки виконується завжди і однозначно,тому образом даної
точки В при паралельному перенесенні є єдина точка В' (рис.2.1).
Маючи одну пару відповідних точок (А, А'),можна побудувати
скільки завгодно інших пар точок. Усі такі пари утворюють множину
співнапрямлених, однакових по довжині відрізків. Множину таких відрізків
називають вектором. Саме в цьому розумінні ми говоримо, що вектор - це
паралельне перенесення.
Оскільки паралельне перенесення (вектор), задане парою (А, А') різних
точок, дає можливість побудувати скільки завгодно інших пар відповідних
точок, і кожна така пара визначає одне й те ж паралельне перенесення, то
кожну з таких пар можна назвати вектором. При цьому всі ці вектори будуть
співнапрямлені і матимуть рівні довжини, тому всі пари відповідних точок,
визначені парою (А, А') - це один і той же вектор, що має різні позначення.
Про такі вектори говорять,що вони рівні,тобто = = . Отже,якщо
задано вектор , то маємо нескінченну множину співнапрямлених і рівних
йому по довжині відрізків (їх називають еквівалентними відрізками). Кожний
з таких відрізків є представником вектора '. Зрозуміло,що будь-який
представник вектора визначає вектор (паралельне перенесення), але вектор
не визначає конкретного представника.
Рис. 2. 1.
2.2. Паралельне перенесення у координатах
Виберемо прямокутну систему координат (О, і, j) на площині, в якій
визначене паралельне перенесення вектором . Якщо А (х; у) і А'(х', у') є парою
відповідних точок, то = . Нехай вектор в (О, і, j) має координати (x0, у0).
Знайдемо представлення координат (х΄,у') точки образу через координати (х,
у) її прообразу. Вектор має координати (х' – х, у' – у). Але = тому
х' - х = x0, у' - у = у0.
Отже, координати (х΄, у') образу виражаються через координати (х, у)
прообразу в паралельному перенесенні на вектор (х0, у0) формулами
(5)
Досить часто також доводиться користуватися формулами, за якими
визначають координати прообразу точки через координати її образу. Ці
формули безпосередньо отримуємо з формул (5):
(6)
2.3. Властивості паралельного перенесення
Координатні формули (5) і (6) паралельного перенесення а дають
можливість легко довести деякі теореми про паралельне перенесення.
Теорема 2.2. Образом прямої в паралельному перенесенні є пряма.
Доведення. Нехай р - деяка пряма, задана рівнянням
ах + by + с = 0. (7)
Підставивши в це рівняння x΄ - x0 замість х і у' - у0 замість у, дістанемо
а(х' -х0) + b (у' -у0) + с = 0, або
ах' + bу' + (с - ах0 - bу0) - 0. (8)
Звідси маємо, що множиною образів точок прямої p є також деяка
пряма р'.
Наслідок 1. Відповідні у паралельному перенесенні прямі - паралельні.
Справді, у рівняннях (7) і (8) коефіцієнти при змінних х, у і x', у' відповідно
рівні, тому р || р'.
Теорема 2.3. Образом півпрямої в паралельному перенесенні є
співнапрямлена з нею півпряма.
Доведення. Нехай паралельне перенесення, задане формулами (5),
переводить точку A (x1, y1) у точку A΄ (x1 + а; у1 + b), точку В (х2; у2) - у точку
В΄ (х2 + а; у2+ b). Після виконання паралельного перенесення матимемо один
із двох випадків: а) точка А не лежить на прямій АВ; б) точка А' лежить на
прямій АВ (рис.6.4).
У першому випадку за попередньою теоремою чотирикутник АА΄ВВ΄ -
паралелограм, у якого вершини В і В' лежать по один бік від прямої АА'. У
другому випадку з того, що точка А' лежить на прямій АВ, випливає, що й
точка В' лежить на цій самій прямій, бо середина (її координати) відрізка АВ'
збігається з серединою (її координатами) відрізка АВ, яка лежить на прямій
АВ. Отже, півпрямі збігаються.
Зрозуміло, що коли дві півпрямі АВ і А΄В΄ розміщені на площині
паралельно одна одній і по один бік від прямої АА΄ або збігаються, то в
кожному випадку буде таке паралельне перенесення , яке одну півпряму
перетворює на іншу.
З огляду на це можна ввести таке означення.
Означення 2.2. Дві півпрямі називаються співнапрямленими, якщо
вони збігаються при деякому паралельному перенесенні.
Означення 2.3. Дві півпрямі називаються протилежно
напрямленими, якщо кожна з них однаково напрямлена з півпрямою, що є
доповняльною до другої.
Теорема 2.4. Паралельне перенесення є рухом.
Доведення. Нехай у паралельному перенесенні а(х0,у0) точки А (х1; у1),
В (х΄2; у΄2) відображаються на точки А' (х΄; у΄), В΄ (х΄2; у΄2).
Звідси АВ =А'В' отже, паралельне перенесення є рухом.
Наслідок 2. Образом будь-якої фігури F у паралельному перенесенні є
фігура F΄, рівна фігурі F.
Таким чином, у паралельному перенесенні кожен відрізок
відображається на паралельний і рівний йому відрізок, трикутник - на рівний
йому трикутник, коло - на рівне йому коло, кут - на рівний йому кут і т.д.
Крім того, паралельне перенесення має ще такі властивості.
1. На площині в паралельному перенесенні а ≠ 0 немає незмінних
точок. Справді, образом кожної точки А площини є така точка А' цієї ж
площини, що АА΄ = а, при а ≠ 0 А ≠ А΄.
2. Незмінними прямими площини у паралельному перенесенні а є всі прямі,
паралельні вектору .
3. Якщо точка С лежить між точками А і В, то образ С точки С лежить між
образами А' і В' точок А і В у будь-якому паралельному перенесенні.
4. Упорядкованість точок прямої є інваріантом паралельного перенесення
площини.
5. Відповідні фігури в паралельному перенесенні мають однакову
орієнтацію.
Розглянуті теореми і властивості дають можливість спростити
побудову образів фігур у паралельному перенесенні. Так, для побудови
образу відрізка досить побудувати образи його кінців, для побудови образа
променя - побудувати образ його початку і однієї довільної точки, для
побудови образу трикутника будуємо образи його вершин, для побудови
образа кола будуємо образ його центра і тим же радіусом описуємо коло і т.д.
Загальні властивості паралельного перенесення можна використати для
знаходження інваріантів конкретних фігур у даному паралельному
перенесенні.
Наприклад, легко переконатися, що медіана, висота, бісектриса
трикутника відображається відповідно на медіану, висоту, бісектрису образу
трикутника; точки перетину медіан, висот, бісектрис переходить відповідно у
точки перетину медіан, висот, бісектрис і т.п.
Зауважимо, що поняття перетворення для фігур у просторі означають
так само, як і на площині.
Зокрема, паралельним перенесенням у просторі називається таке
перетворення, при якому довільна точка (х;у;z) фігури переходить у точку
(х+а; у+ b; z + с), де числа а, b, с - одні і ті ж самі для всіх точок.
Паралельне перенесення у просторі задають формулами:
що виражають координати , , точки, у яку переходить точка (х; у; z)
при паралельному перенесенні.
Розглянео для прикладу розв’язання задачі:
Чи існує паралельне перенесення, при якому точка А переходить у
точку В, а точка С - у точку D, якщо: А (0; 1; 2), В (-1; 0; 1), С (3;- 2; 2),
D (2; - 3 ; 1)?
Розв’язання. Пара точок А і В визначає паралельне перенесення, до того ж
єдине. Знайдемо його формули:
-1 = 0 + а, 0 = 1 + b, 1 = 2 + с.
Звідси: а = - 1, b = - 1, с = - 1, тому маємо такі формули:
x' = x - 1, y' = y - 1, z' = - z - 1.
Перевіримо, чи задовольняють ці формули координати другої пари точок
С та D.
Підставивши, матимемо:
2 = 3 - 1, -3 = -2 - 1, 1 = 2 - 1.
Отже, існує.
2.4. Найпростіші застосування паралельного перенесення
Пряму, вздовж якої відбувається паралельне перенесення, називають
віссю трансляції (паралельного перенесення). Величина найменшого
перенесення вздовж осі, яка приводить до само суміщення фігури,
називається періодом трансляції (паралельного перенесення). Таким чином,
паралельне перенесення характеризується періодом і напрямом.
Паралельне перенесення широко застосовується в різноманітних
сферах людської діяльності.
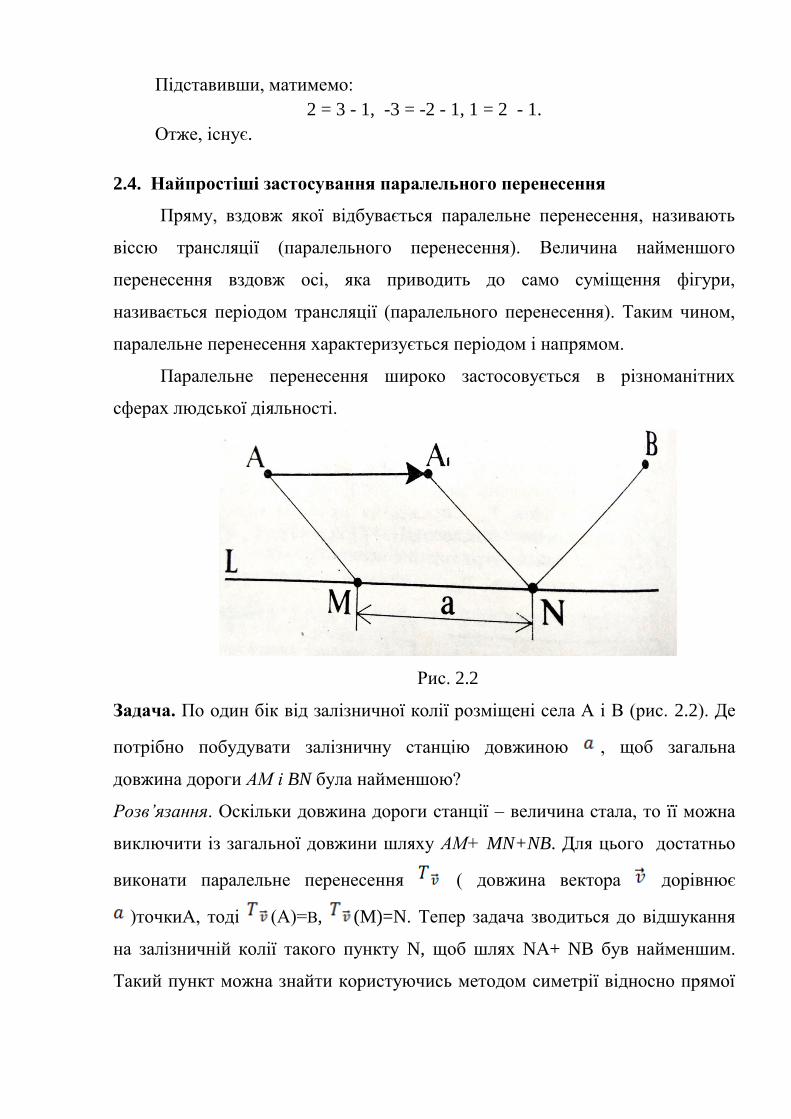
Рис. 2.2
Задача. По один бік від залізничної колії розміщені села А і В (рис. 2.2). Де
потрібно побудувати залізничну станцію довжиною , щоб загальна
довжина дороги АМ і BN була найменшою?
Розв’язання. Оскільки довжина дороги станції – величина стала, то її можна
виключити із загальної довжини шляху АМ+ MN+NB. Для цього достатньо
виконати паралельне перенесення ( довжина вектора дорівнює
)точкиА, тоді (А)=В, (M)=N. Тепер задача зводиться до відшукання
на залізничній колії такого пункту N, щоб шлях NА+ NB був найменшим.
Такий пункт можна знайти користуючись методом симетрії відносно прямої

l. Тепер, відклавши від точки N відрізок, що дорівнює , в напрямі А,
дістанемо точку M. Цим самим знайдемо полоення станції MN.
Виконання паралельного перенесення значно спрощує дослідження і
побудову графіків багатьох функцій. Так, наприклад, при побудові графіка
функції спочатку будують графік функції , а потім графік
функції паралельно переносять уздовж осі вгору(вниз) на
одиниць, якщо b>0 (b<0), або графік функції залишають нерухомим, а
вісь паралельно переносять вниз (вгору) на одиниць, якщо b>0 (b<0).
Для побудови графіка функції аналогічні перетворення
виконують або над графіком функції , або над віссю . Справді, нехай
функція у декій точці набуває значення . Тоді функція
набуває того самого значення в такій точці , що або
. Тому графік функції можна дістати паралельним
перенесенням графіка функції уздовж осі вліво на одиниць, якщо
> 0, або вправо на одиниць, якщо < 0.
Зрозуміло, що розглянуте перетворення графіка рівносильне
паралельному перенесенню осі на стільки ж одиниць, але в
протилежному напрямі.
Паралельне перенесення зустрічаємо і в будові молекул. Молекулами-
ланцюжками є насичені вуглеводи
Рис. 2.3
Симетрія таких полімерів, як капрон, нейлон, каучук теж включає
паралельне перенесення.
Приклади застосування паралельного перенесення площини до
розв’язування задач
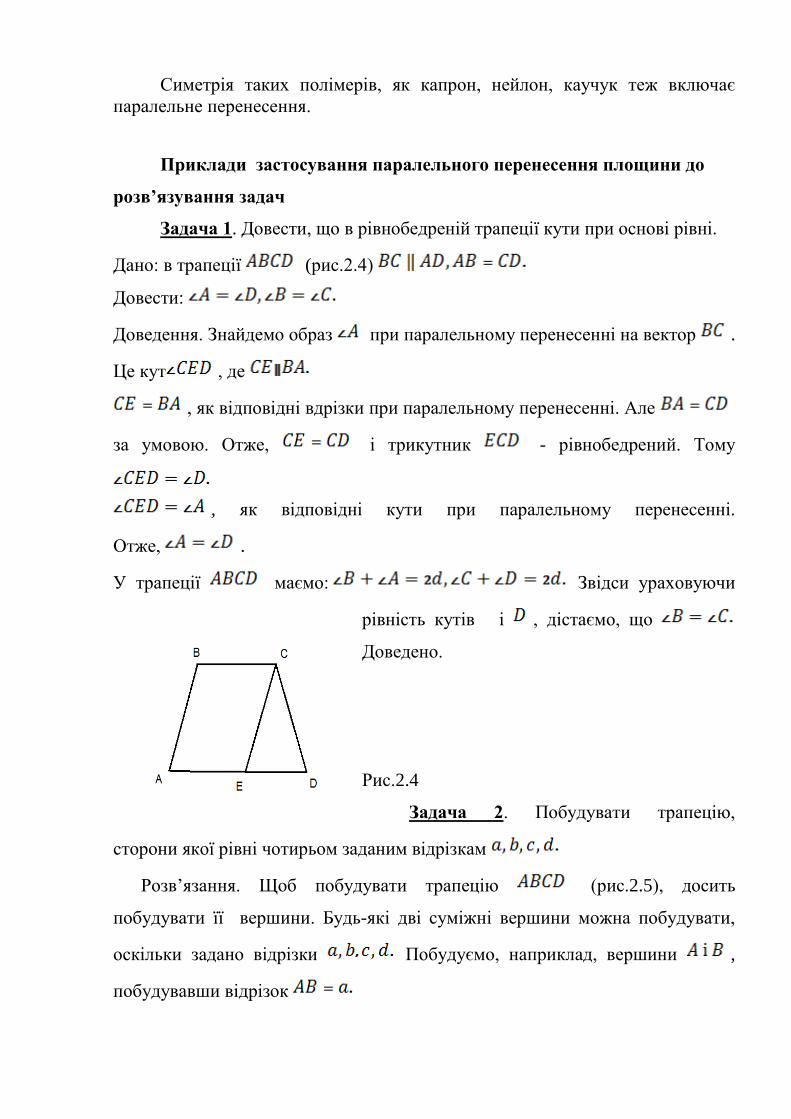
Задача 1. Довести, що в рівнобедреній трапеції кути при основі рівні.
Дано: в трапеції (рис.2.4)
Довести:
Доведення. Знайдемо образ при паралельному перенесенні на вектор .
Це кут , де
, як відповідні вдрізки при паралельному перенесенні. Але
за умовою. Отже, і трикутник - рівнобедрений. Тому
, як відповідні кути при паралельному перенесенні.
Отже, .
У трапеції маємо: Звідси ураховуючи
рівність кутів і , дістаємо, що
Доведено.
Рис.2.4
Задача 2. Побудувати трапецію,
сторони якої рівні чотирьом заданим відрізкам
Розв’язання. Щоб побудувати трапецію (рис.2.5), досить
побудувати її вершини. Будь-які дві суміжні вершини можна побудувати,
оскільки задано відрізки Побудуємо, наприклад, вершини ,
побудувавши відрізок
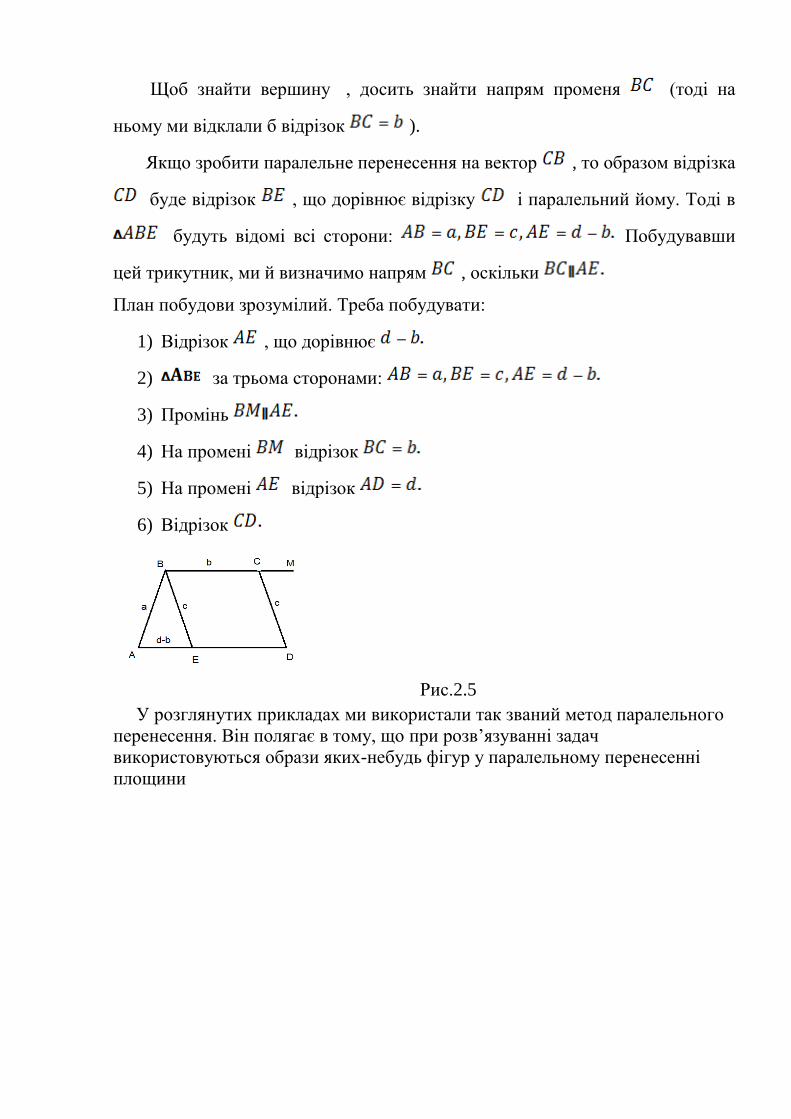
Щоб знайти вершину , досить знайти напрям променя (тоді на
ньому ми відклали б відрізок ).
Якщо зробити паралельне перенесення на вектор , то образом відрізка
буде відрізок , що дорівнює відрізку і паралельний йому. Тоді в
будуть відомі всі сторони: Побудувавши
цей трикутник, ми й визначимо напрям , оскільки
План побудови зрозумілий. Треба побудувати:
1) Відрізок , що дорівнює
2) за трьома сторонами:
3) Промінь
4) На промені відрізок
5) На промені відрізок
6) Відрізок
Рис.2.5
У розглянутих прикладах ми використали так званий метод паралельного
перенесення. Він полягає в тому, що при розв’язуванні задач
використовуються образи яких-небудь фігур у паралельному перенесенні
площини

1
Розділ 3. Перетворення симетрій
3.1. Поняття симетрії відносно точки
3.1.1. Симетрія відносно точки на площині
Нехай О - фіксована точка і Х – довільна точка площини.
Відкладемо на продовжені відрізка ОХ за точку О відрізок ОХ’, що дорівнює
ОХ. Точка Х’ називається симетричною точці Х відносно точки О. Точка,
симетрична точці О, є сама точка О. Очевидно, точка симетрична точці Х’, є
точка Х ( рис.3.1). Точки X і X' називаються симетричними відносно точки О, а
точка О - центром симетрії. Об'єкти, які мають цю властивість, називають
симетричними відносно точки О або просто центрально - симетричними.
Х
X'
Рис. 3.1
Таким чином, геометрична фігура F називається центрально -
симетричною, якщо існує точка О, відносно якої можна здійснити
відображення кожної точки X фігури F на таку точку X' цієї самої фігури, яка
розміщена на прямій ОХ на відстані ОХ,΄ що дорівнює ОХ.
Знаючи, які дві точки називаються симетричними відносно даної точки О і
як їх можна побудувати, ми можемо для будь-якої даної фігури F побудувати
фігуру F΄ симетричну відносно даної точки О. Тоді фігура F΄ утворена з усіх
точок, симетричних точкам фігури F відносно даної точки О, називається
симетричною фігурі F відносно точки О, а перетворення фігури F у фігуру F΄
при якому довільна точка X фігури F переходить у симетричну відносно деякої
точки О точку X' фігури F΄, називається перетворенням симетрії відносно точки
О. Позначають це перетворення через Z0 , причому, якщо точка X' є образом точки
X, то це записують так: (Z0X) = X' або X' - Z0(Х).
2
3.1.2. Перетворення симетрії в просторі
Означення симетрії відносно точки, відоме з планіметрії, залишається
правильним і для стереометрії.
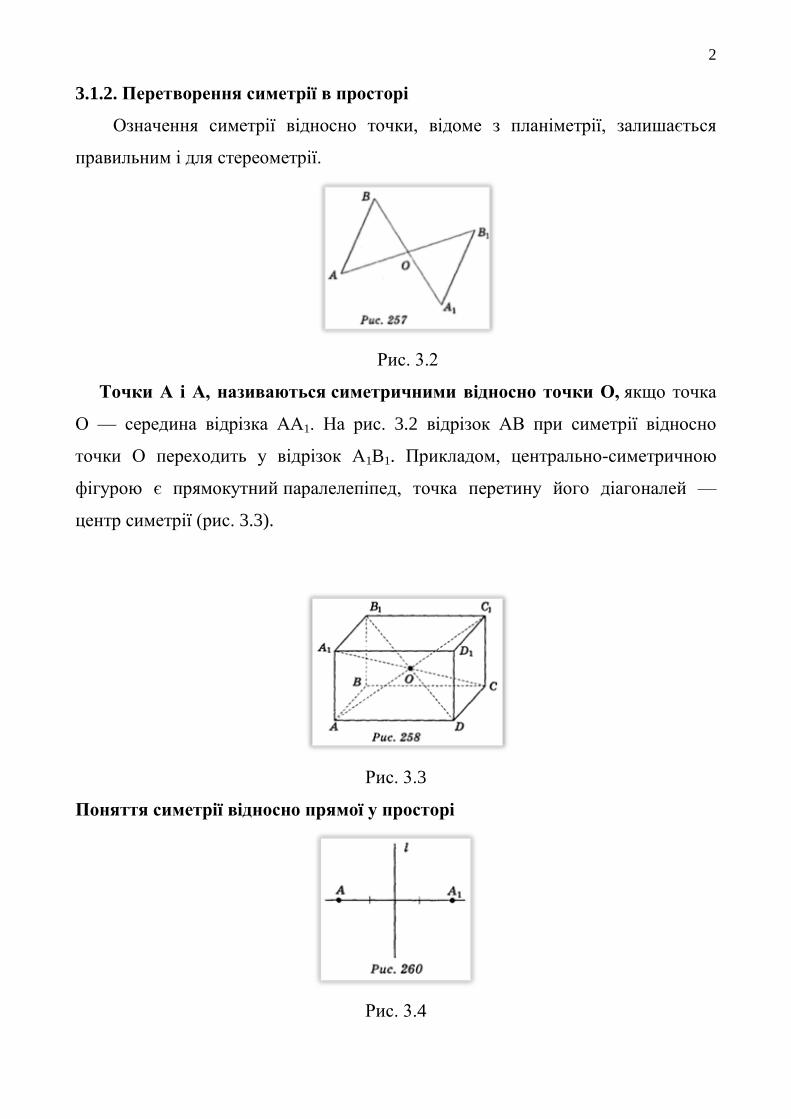
Рис. 3.2
Точки А і А, називаються симетричними відносно точки О, якщо точка
О — середина відрізка AA1. На рис. 3.2 відрізок АВ при симетрії відносно
точки О переходить у відрізок A1B1. Прикладом, центрально-симетричною
фігурою є прямокутний паралелепіпед, точка перетину його діагоналей —
центр симетрії (рис. 3.3).
Рис. 3.3
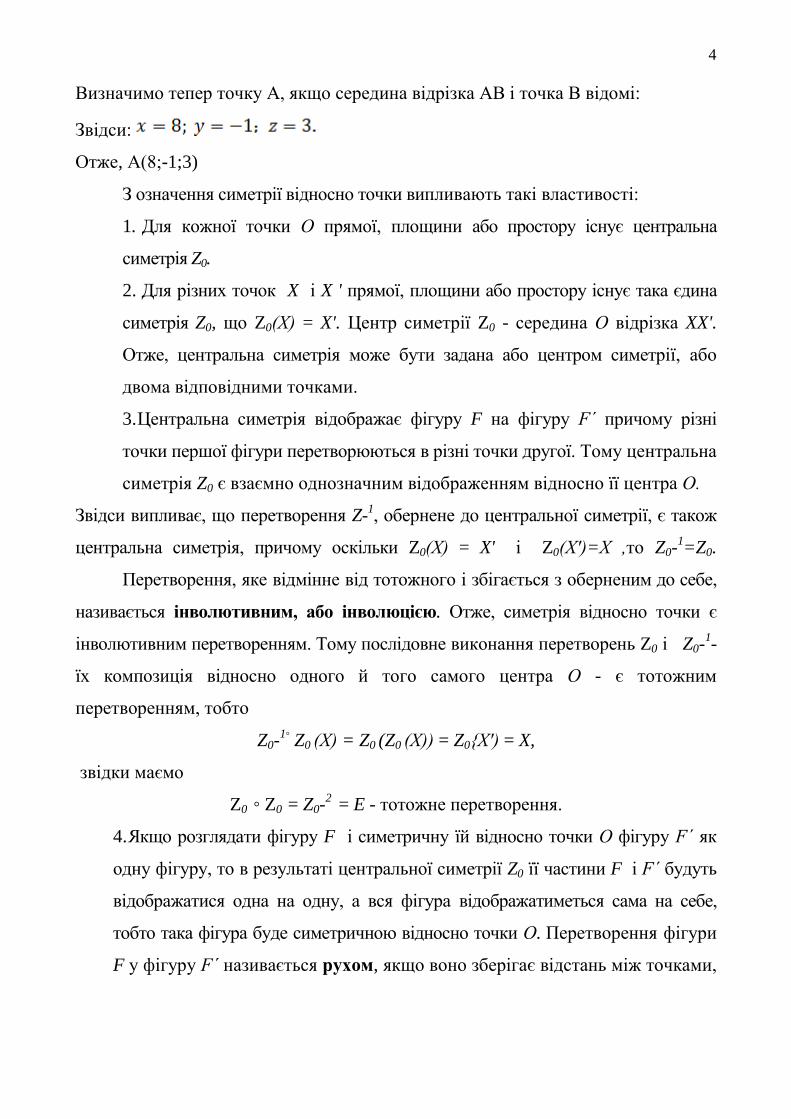
Поняття симетрії відносно прямої у просторі
Рис. 3.4

3
Точки А і А1 називаються симетричними відносно прямої l, якщо
пряма l проходить через середину відрізка АА1 і перпендикулярна до нього
(рис. 3.4).
Перетворення, яке відображає кожну точку фігури на точку, симетричну їй
відносно даної прямої, називається симетрією відносно прямої (або осьовою
симетрією)..
Розглянемо для прикладу задачу.
Знайти точку А симетричну точці В(2;-5;7) відносно прямої
Розв’язання:
Точки А(x;y;z) та В(2;-5;7) лежать на прямій, перпендикулярній до заданої,
і ця пряма ділить відрізок АВ навпіл. Знайдемо середину відрізка АВ,
координати якої позначимо через, , , C( ; ; ). Через точку В
проведемо площину, перпендикулярну до осі симетрії, тобто до заданої прямої.
Рівняння цієї площини таке: l(x- )+m(y- )+n(z- =0, де l, m, n –
координати вектора-напряму прямої, до якої ця площина є перпендикулярною.
Якщо пряма заданазагальним рівнянням
То за її напрямний вектор можна взяти вектор
.
Тоді рівняння площини запишемо так:
Знайдемо точку перетину цієї площини з віссю симетрії. Це і буде точка С.
Pозв’яжемо спочатку систему рівнянь:
Розв’язком цієї системи є: =5, Z = 5 тобто С(5,-3,5).
4
Визначимо тепер точку А, якщо середина відрізка АВ і точка В відомі:
Звідси:
Отже, А(8;-1;3)
З означення симетрії відносно точки випливають такі властивості:
1. Для кожної точки О прямої, площини або простору існує центральна
симетрія Z0.
2. Для різних точок X і X ' прямої, площини або простору існує така єдина
симетрія Z0, що Z0(Х) = X'. Центр симетрії Z0 - середина О відрізка XX'.
Отже, центральна симетрія може бути задана або центром симетрії, або
двома відповідними точками.
3. Центральна симетрія відображає фігуру F на фігуру F΄ причому різні
точки першої фігури перетворюються в різні точки другої. Тому центральна
симетрія Z0 є взаємно однозначним відображенням відносно її центра О.
Звідси випливає, що перетворення Z-1, обернене до центральної симетрії, є також
центральна симетрія, причому оскільки Z0(Х) = X' і Z0(Х')=Х ,то Z0-1=Z0.
Перетворення, яке відмінне від тотожного і збігається з оберненим до себе,
називається інволютивним, або інволюцією. Отже, симетрія відносно точки є
інволютивним перетворенням. Тому послідовне виконання перетворень Z0 і Z0-1-
їх композиція відносно одного й того самого центра О - є тотожним
перетворенням, тобто
Z0-1◦
Z0 (Х) = Z0 (Z0 (Х)) = Z0{Х') = X,
звідки маємо
Z0 ◦ Z0 = Z0-2 = E - тотожне перетворення.
4. Якщо розглядати фігуру F і симетричну їй відносно тoчки О фігуру F΄ як
одну фігуру, то в результаті центральної симетрії Z0 її частини F і F΄ будуть
відображатися одна на одну, а вся фігура відображатиметься сама на себе,
тобто така фігура буде симетричною відносно точки О. Перетворення фігури
F у фігуру F΄ називається рухом, якщо воно зберігає відстань між точками,
5
тобто переводить будь-які дві точки X і У фігури F відповідно у точки Х΄
У΄ фігури F΄ так, що ХY переводить у Х΄ Y΄.
5. Перетворення симетрії відносно точки є рухом.
6. Точки, які лежать на прямій, переходять у результаті руху в точки, що
також лежать на прямій, причому зберігається порядок їх взаємного
розміщення.
Отже, центральна симетрія Z0 перетворює:
а) відрізок у рівний і паралельний йому відрізок;
б) напрямлений відрізок – у рівний і протилежно напрямлений
антипаралельний відрізок;
в) промінь – у паралельний і протилежно напрямлений промінь;
г) пряму – у паралельну пряму;
д) кут – у рівний йому кут;
є) площину - у паралельну площину.
7. Єдина нерухома точка перетворення симетрії відносно точки О - сама
ця точка (центр симетрії). Нерухомою є також кожна пряма, що
проходить через центр симетрії, причому кожна точка прямої, що лежить
по один бік від точки О, переходить у точку, що лежить по другий бік від
точки О. Нерухомою є й кожна площина простору, що проходить через
центр симетрії, причому нерухомою точкою такої площини є тільки центр
симетрії.
8. Якщо фігура має два центри симетрії О і О1 то вона має нескінченну їх
множину і необмежена. Прикладами таких фігур є пряма, смуга,
нескінченний в обидва боки круговий циліндр тощо.
9. Якщо фігура має три центри симетрії О, О1, 02, що не лежать на
одній прямій, то вона має в площині ОО1 02 нескінченну множину
центрів. Вони утворюють решітку паралелограмів (рис.3.5).

6
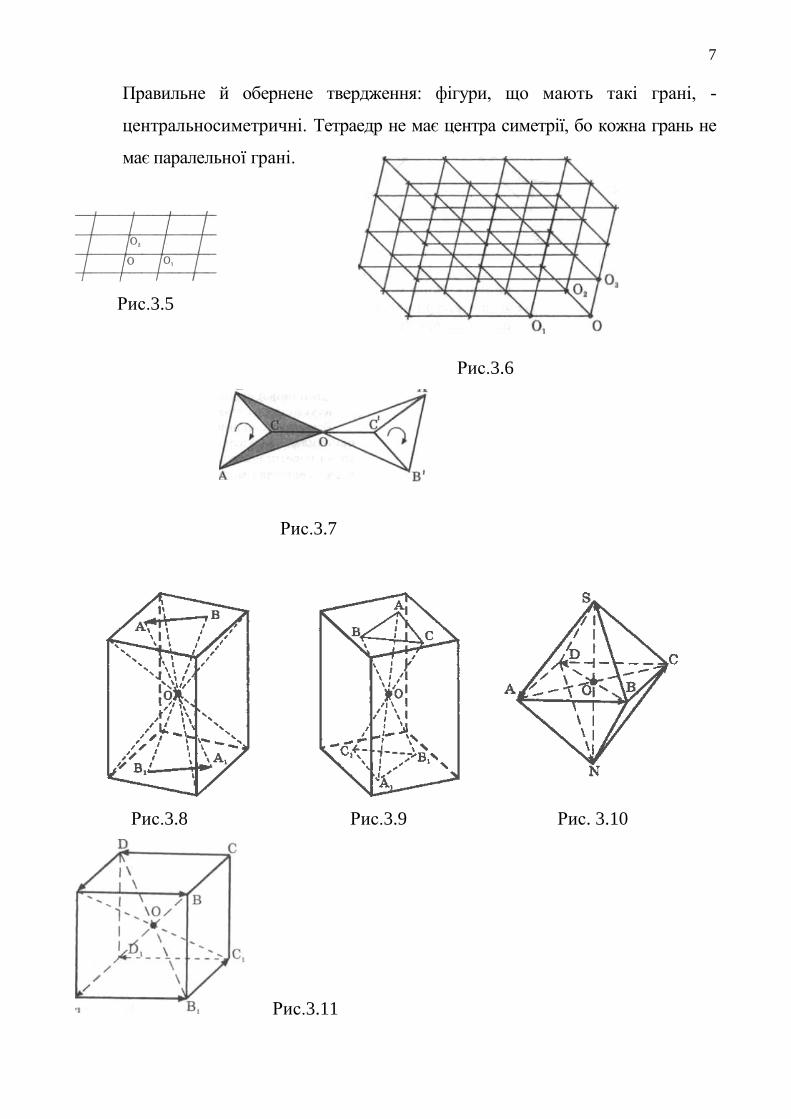
10. Якщо фігура має чотири центри симетрії, які не лежать на одній
площині, то вона має нескінченну множину центрів. Усі такі центри
утворюють решітку паралелепіпедів (рис.3.6).
11.Центральна симетрія на площині не змінює орієнтації трикутника
(обхід трикутника за годинниковою стрілкою або проти годинникової
стрілки), але сторони центрально - симетричних трикутників є
антипаралельними (рис.3.7).
Розглянемо многогранник, що має центр симетрії. Такою фігурою є,
наприклад, паралелепіпед (рис.3.8). Центр симетрії паралелепіпеда - точка
перетину його діагоналей, бо відносно цієї точки кожна точка паралелепіпеда
має симетричну, кожному ребру відповідає антипаралельне ребро. Так, анти
паралельність відрізків, променів, прямих - одна з характерних властивостей
фігур, що мають центр симетрії.
Візьмемо на одній з граней паралелепіпеда три довільні точки (рис.3.9), які
визначають деякий трикутник. Уявімо собі, що зовнішня поверхня цього
трикутника заштрихована. Оскільки паралелепіпед має центр симетрії, то на
протилежній грані існує центрально симетричний йому трикутник,
заштрихований ззовні. Такі трикутники, за аналогією до відрізків, називають
антипаралельними.
Антипаралельність граней октаедра досить помітна: його трикутні
паралельні грані напрямлені вершинами в різні боки, орієнтація протилежних
граней протилежна (рис.3.10). Отже, має місце така властивість.
12. Грані многогранника, що має центр симетрії, перетворюються при
симетрії відносно нього в рівні й антипаралельні грані протилежної орієнта-
ції (рис.3.11). Центральна симетрія в просторі перетворює праву
рукавичку в ліву і навпаки.
13.Відповідні пари граней, які самі мають центр симетрії, многогранника,
що також має центр симетрії, є одночасно паралельними й
антипаралельними. Ця властивість характерна, наприклад, для куба.
7
Правильне й обернене твердження: фігури, що мають такі грані, -
центральносиметричні. Тетраедр не має центра симетрії, бо кожна грань не
має паралельної грані.
Рис.3.5
Рис.3.6
Рис.3.7
Рис.3.8 Рис.3.9 Рис. 3.10
Рис.3.11
8
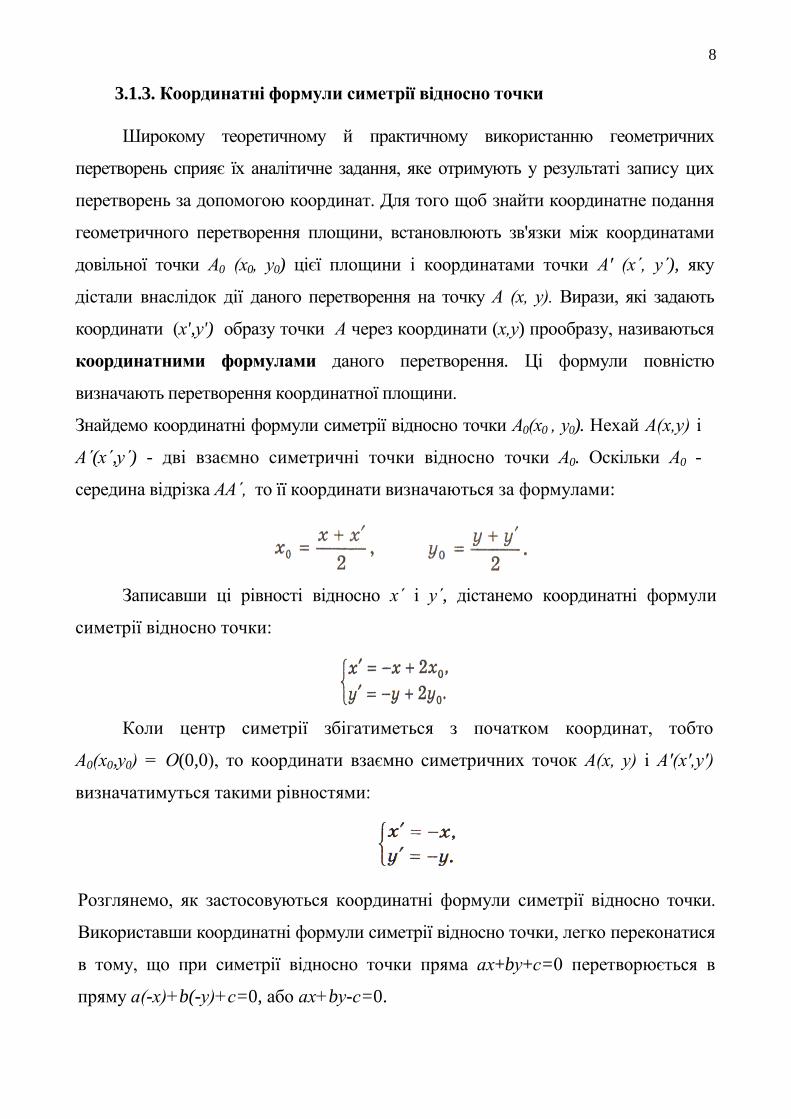
3.1.3. Координатні формули симетрії відносно точки
Широкому теоретичному й практичному використанню геометричних
перетворень сприяє їх аналітичне задання, яке отримують у результаті запису цих
перетворень за допомогою координат. Для того щоб знайти координатне подання
геометричного перетворення площини, встановлюють зв'язки між координатами
довільної точки А0 (х0, у0) цієї площини і координатами точки А' (х΄, у΄), яку
дістали внаслідок дії даного перетворення на точку А (х, у). Вирази, які задають
координати (х',у') образу точки А через координати (х,у) прообразу, називаються
координатними формулами даного перетворення. Ці формули повністю
визначають перетворення координатної площини.
Знайдемо координатні формули симетрії відносно точки А0(х0 , у0). Нехай А(х,у) і
А΄(х΄,у΄) - дві взаємно симетричні точки відносно точки А0. Оскільки А0 -
середина відрізка АА΄, то її координати визначаються за формулами:
Записавши ці рівності відносно х΄ і у΄, дістанемо координатні формули
симетрії відносно точки:
Коли центр симетрії збігатиметься з початком координат, тобто
А0(х0,у0) = О(0,0), то координати взаємно симетричних точок А(х, у) і А'(х',у')
визначатимуться такими рівностями:
Розглянемо, як застосовуються координатні формули симетрії відносно точки.
Використавши координатні формули симетрії відносно точки, легко переконатися
в тому, що при симетрії відносно точки пряма ах+bу+с=0 перетворюється в
пряму а(-х)+b(-у)+с=0, або ах+bу-с=0.
9
Аналогічно можна довести, що така симетрія перетворює площину в
площину тощо.
3.2. Симетрія відносно прямої
3.2.1.Поняття симетрія відносно прямої
Численні об'єкти навколишнього світу мають властивість, за якого права і
ліва частини є ніби дзеркальним відображенням одна одної відносно деякої
прямої l.
Про такі фігури кажуть, що вони симетричні відносно прямої l, а пряму l
називають віссю симетрії фігури. Симетричні, наприклад, листки і квіти бага-
тьох рослин, крила комах, сніжинки, орнаменти, елементи архітектурного
оздоблення будинків. На рис.3.12. зображено листок клена, на рис 3.13 - ме-
телик, на рис.3.14, 3.15 – сніжинки.
Поняття симетрії відносно прямої тісно пов'язане іі властивостями
збереження певних величин, форм, законів. Симетрія має велике значення в
науці, мистецтві, у практичній діяльності людини. Симетрію відносно прямої в
мистецтві широко застосовували ще в стародавні часи, про що свідчать
малюнки, споруди, різноманітні орнаменти на спорудах, виконані за декілька
тисячоліть до нашої ери.
Симетрія живої природи не лише виражається в красі форм, а й має широке
практичне застосування. Ще в стародавні часи люди помічали, що симетричні
форми, які існують у природі, є прикладами стійкості, практичності,
доцільності.
Художники користуються симетрією як символом краси. Архітектори
намагаються будувати симетричні споруди 13 строгим повторенням усіх
деталей відносно лінії симетрії фасаду: зліва й справа має бути однакова
кількість колон, вікон, дверей тощо.
Створюючи літаки, космічні ракети, людина використовує осьову симетрію,
яка значно перевершує природні форми й закони симетрії. Але ці симетричні
форми все - таки нагадують природні форми: літак - птах, ракета - віковий дуб.
10
Усе це підтверджує, що осьова симетрія тісно пов'язана з життям, з природою
та її закономірностями.
Рис. 3.12 Рис. 3.13
Рис. 3.14 Рис. 3.15
3.2.2. Означення і задання симетрії відносно прямої
Означення 3.1. Нехай l - деяка пряма площини. Перетворення площини,
при якому точки прямої l самі собі відповідають, а будь - якій точці А, не
належній прямій l, відповідає така точка А' цієї ж площини, що відрізок АА'
перпендикулярний до прямої l і ділиться нею навпіл, називається симетрією
відносно прямої l, або осьовою симетрією.
Пряма l називається віссю симетрії. Точка А' називається симетричною точці А
відносно прямої l. Осьову симетрію з віссю l позначають символом Sl. Якщо
точка А' є образом точки А в симетрії відносно прямої l, записують:
Осьова симетрія повністю визначається заданням або осі симетрії, або однієї
пари відповідних точок, або двох різних незмінних точок.
11
Справді, якщо задану пряму l на площині вибрано за вісь симетрії, то згідно
з означенням для будь - якої точки А площини можна знайти її образ такою
побудовою.
1. Через точку А проведемо пряму, перпендикулярну прямій l, до перетину з
нею в точці А0 (рис.3.16).
2. По інший бік від прямої l на побудованому перпендикулярі від точки А0
відкладемо відрізок А0А', рівний підрізку АА0, дістанемо А' = Sl (A).
Нехай осьова симетрія задана однією парою відповідних точок В0 і В΄
Тоді, знайшовши середину В0 відрізка ВВ΄ проведемо через В0 пряму l, пер-
пендикулярну до відрізка ВВ΄. Це й буде вісь симетрії, у якій В' = S΄(B).
Тепер можна будувати скільки завгодно пар відповідних точок за
означенням 3.1.
Якщо ж осьову симетрію задано двома незмінними точками, то пряма, яка
проходить через ці точки, буде віссю симетрії, бо за означенням 3.1 незмінними
точками є точки осі симетрії. На (рис.3.16) побудовано три пари відповідних
точок:
Рис.3.16
Означення 3.2. Якщо в симетрії відносно прямої l деяка фігура F
відображається на себе, то така фігура називається симетричною відносно
прямої l, а пряма l називається віссю симетрії фігури F.
Наприклад, бісектриса кута є його віссю симетрії; серединний
перпендикуляр відрізка є його віссю симетрії; кожна висота
рівносторонньоготрикутника є його віссю симетрії; кожна діагональ ромба
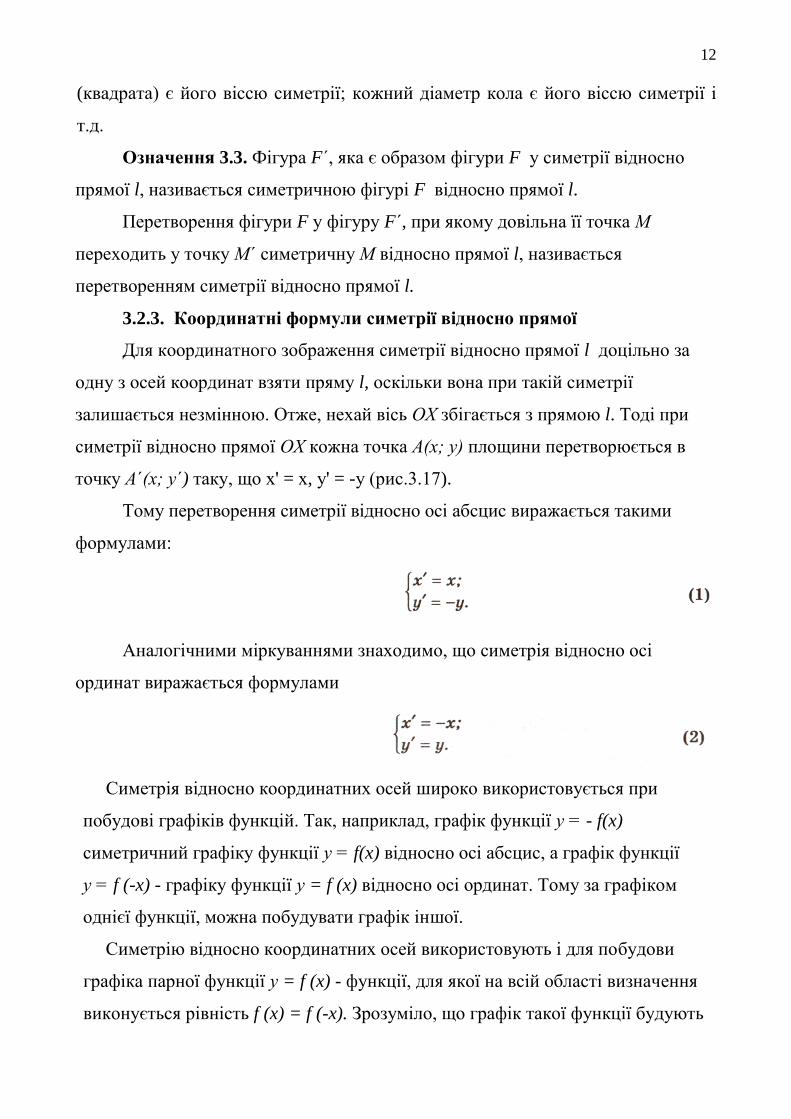
12
(квадрата) є його віссю симетрії; кожний діаметр кола є його віссю симетрії і
т.д.
Означення 3.3. Фігура F΄, яка є образом фігури F у симетрії відносно
прямої l, називається симетричною фігурі F відносно прямої l.
Перетворення фігури F у фігуру F΄, при якому довільна її точка М
переходить у точку М΄ симетричну М відносно прямої l, називається
перетворенням симетрії відносно прямої l.
3.2.3. Координатні формули симетрії відносно прямої
Для координатного зображення симетрії відносно прямої l доцільно за
одну з осей координат взяти пряму l, оскільки вона при такій симетрії
залишається незмінною. Отже, нехай вісь ОХ збігається з прямою l. Тоді при
симетрії відносно прямої ОХ кожна точка А(х; у) площини перетворюється в
точку А΄(х; у΄) таку, що х' = х, у' = -у (рис.3.17).
Тому перетворення симетрії відносно осі абсцис виражається такими
формулами:
Аналогічними міркуваннями знаходимо, що симетрія відносно осі
ординат виражається формулами
Симетрія відносно координатних осей широко використовується при
побудові графіків функцій. Так, наприклад, графік функції у = - f(x)
симетричний графіку функції у = f(x) відносно осі абсцис, а графік функції
у = f (-x) - графіку функції у = f (x) відносно осі ординат. Тому за графіком
однієї функції, можна побудувати графік іншої.
Симетрію відносно координатних осей використовують і для побудови
графіка парної функції у = f (x) - функції, для якої на всій області визначення
виконується рівність f (x) = f (-x). Зрозуміло, що графік такої функції будують
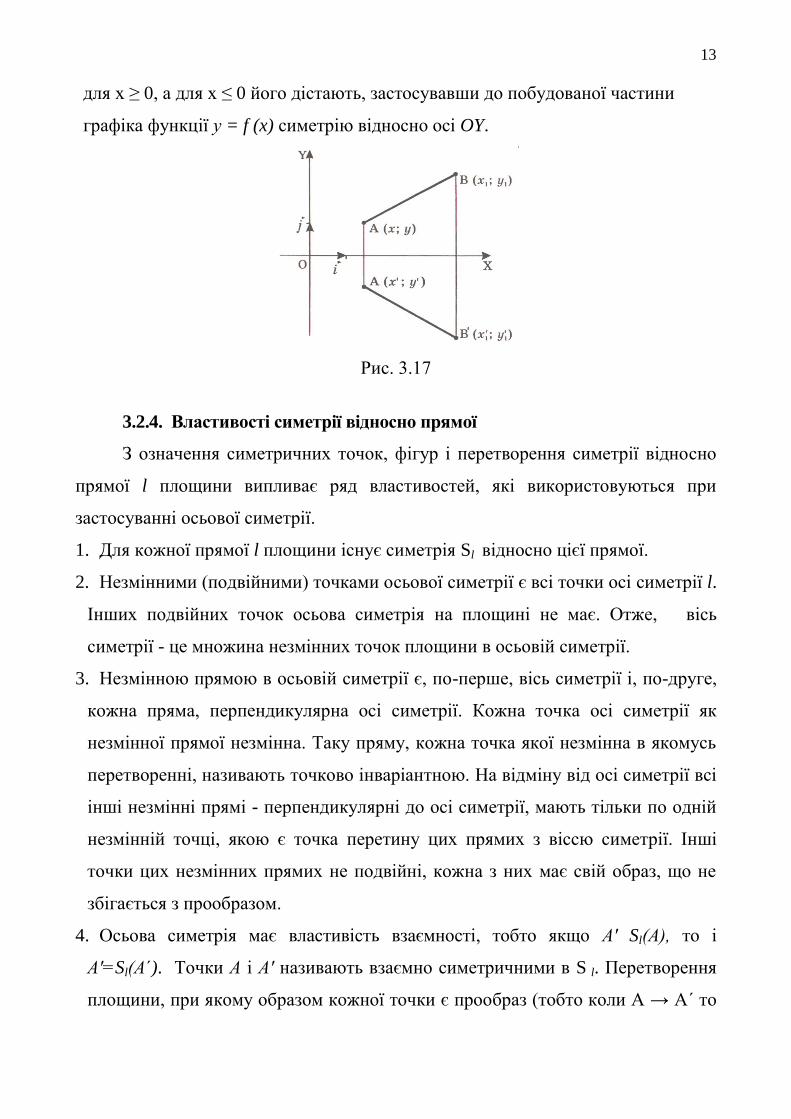
13
для х ≥ 0, а для х ≤ 0 його дістають, застосувавши до побудованої частини
графіка функції у = f (x) симетрію відносно осі OY.
Рис. 3.17
3.2.4. Властивості симетрії відносно прямої
З означення симетричних точок, фігур і перетворення симетрії відносно
прямої l площини випливає ряд властивостей, які використовуються при
застосуванні осьової симетрії.
1. Для кожної прямої l площини існує симетрія Sl відносно цієї прямої.
2. Незмінними (подвійними) точками осьової симетрії є всі точки осі симетрії l.
Інших подвійних точок осьова симетрія на площині не має. Отже, вісь
симетрії - це множина незмінних точок площини в осьовій симетрії.
3. Незмінною прямою в осьовій симетрії є, по-перше, вісь симетрії і, по-друге,
кожна пряма, перпендикулярна осі симетрії. Кожна точка осі симетрії як
незмінної прямої незмінна. Таку пряму, кожна точка якої незмінна в якомусь
перетворенні, називають точково інваріантною. На відміну від осі симетрії всі
інші незмінні прямі - перпендикулярні до осі симетрії, мають тільки по одній
незмінній точці, якою є точка перетину цих прямих з віссю симетрії. Інші
точки цих незмінних прямих не подвійні, кожна з них має свій образ, що не
збігається з прообразом.
4. Осьова симетрія має властивість взаємності, тобто якщо А' Sl(А), то і
А'=Sl(А΄). Точки А і А' називають взаємно симетричними в S l. Перетворення
площини, при якому образом кожної точки є прообраз (тобто коли А → А΄ то
14
й А' → А), називається інволюційним. Отже, перетворення площини в
симетрії відносно прямої є інволюційним перетворенням,
5. Якщо пряма а і її образ а' в осьовій симетрії S l перетинаються в якійсь точці
А 0, то ця точка перетину належить осі симетрії l. Справді, образ точки А 0
прямої а повинен належати як прямій А' = Sl (а), так і прямій, проведеній через
А 0 перпендикулярно до l, Оскільки А 0 = а • а΄ то перпендикуляр, проведений
до l через А 0, не може перетнути а' в іншій точці, відмінній від A 0, бо він
перетинає пряму а' в точці А 0. Отже, А 0 є l.
6. Якщо пряма а перетинає вісь симетрії і в якійсь точці А 0, то через точк
А0 пройде і пряма а' - образ прямої а в осьовій симетрії Sl .
7. Будь-які дві точки площини мають лише одну вісь симетрії.
8. Для будь - яких півпрямих АВ і АС існує така симетрія S l, при якій
кожна з них переходить у другу відносно прямої l; пряма l є
бісектрисою кута ВАС.
9. Фігури, що мають єдину вісь симетрії, поділяються нею на дві асиметричні
частини протилежної орієнтації, які називаються енантіоморфами. Лівий і
правий енантіоморфи не можна сумістити ніяким рухом у площині, відмінним
від осьової симетрії. їх можна сумістити, якщо виконати поворот у
тривимірному просторі навколо осі симетрії.
Теорема 3.1. Осьова симетрія на площині є рухом.
Для доведення теореми досить довести, що відстань між точками А і
В дорівнює відстані між їх образами А' і В' в симетрії відносно
прямої l. З цією метою використаємо координатний метод у системі
(0, і, j ),вісь ОХ якої збігається з віссю симетрії.
Дано: А(х'; у') = S l (А(х; у)). В΄ ((х΄1; у΄1) = S1 (В(х1; у1)).
Довести: A΄B΄ = AB.
Доведення: Врахувавши формули залежності між
координатами образа і прообразу, які в даному випадку мають вигляд:

15
знайдемо, що
Цю теорему можна довести на основі рівності трикутників без
використання системи координат (виконати самостійно).
Наведемо ще деякі властивості осьової симетрії, які є наслідком з
доведеної теореми 3.1.
Наслідок 1. Фігури, симетричні відносно прямої, рівні, але мають
протилежну орієнтацію (рис. 3.18).
Наслідок 2. В осьовій симетрії пряма відображається на пряму, промінь -
на промінь.
Наслідок 3. Упорядкованість точок прямої є інваріантом осьової симетрії.
Наслідок 4. Симетричні прямі або перетинаються на осі симетрії, або
паралельні їй.
Наслідок 5. Паралельність прямих є інваріантом осьової симетрії.
Наслідок 6. Точки осі симетрії рівновіддалені від будь-якої пари
симетричних точок.
Наслідок 7. Для будь-яких двох прямих, що перетинаються, можна
побудувати дві осі симетрії - це бісектриси кутів, утворених прямими.
Наслідок 8. Будь-які дві різні паралельні прямі мають одну вісь симетрії -
це множина точок, рівновіддалених від даних паралельних прямих.
Наслідок 9. Об'єднання двох фігур, які мають спільну вісь симетрії,
симетричне відносно цієї ж осі.
Наслідок 10. Переріз двох фігур, які мають спільну вісь симетрії,
симетричний відносно тієї ж осі.
Наслідок 11. Колінеарність точок зберігається при осьовій симетрії.
Наслідок 12. Симетричні прямі утворюють з віссю симетрії рівні кути.
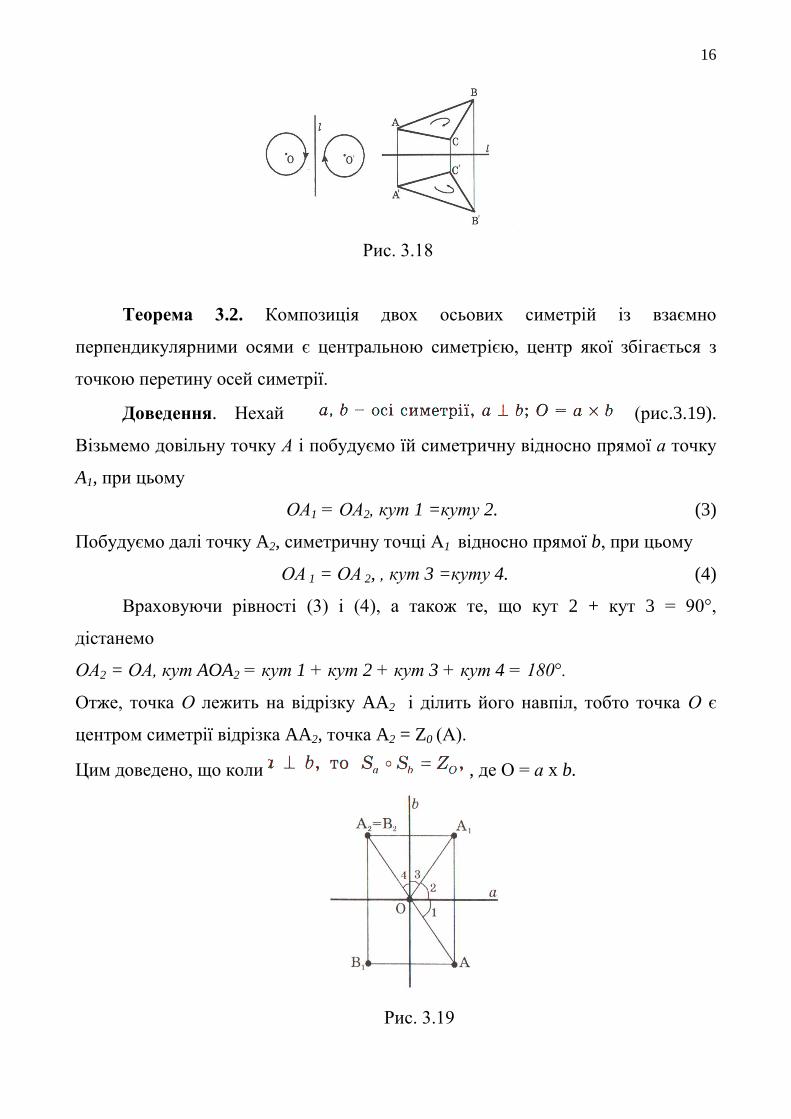
16
Рис. 3.18
Теорема 3.2. Композиція двох осьових симетрій із взаємно
перпендикулярними осями є центральною симетрією, центр якої збігається з
точкою перетину осей симетрії.
Доведення. Нехай (рис.3.19).
Візьмемо довільну точку А і побудуємо їй симетричну відносно прямої а точку
A1, при цьому
ОА1 = ОА2, кут 1 =куту 2. (3)
Побудуємо далі точку A2, симетричну точці А1 відносно прямої b, при цьому
ОА 1 = ОА 2, , кут 3 =куту 4. (4)
Враховуючи рівності (3) і (4), а також те, що кут 2 + кут 3 = 90°,
дістанемо
ОА2 = ОА, кут AOA2 = кут 1 + кут 2 + кут 3 + кут 4 = 180°.
Отже, точка О лежить на відрізку AA2 і ділить його навпіл, тобто точка О є
центром симетрії відрізка AA2, точка A2 = Z0 (А).
Цим доведено, що коли , де О = а x b.
Рис. 3.19
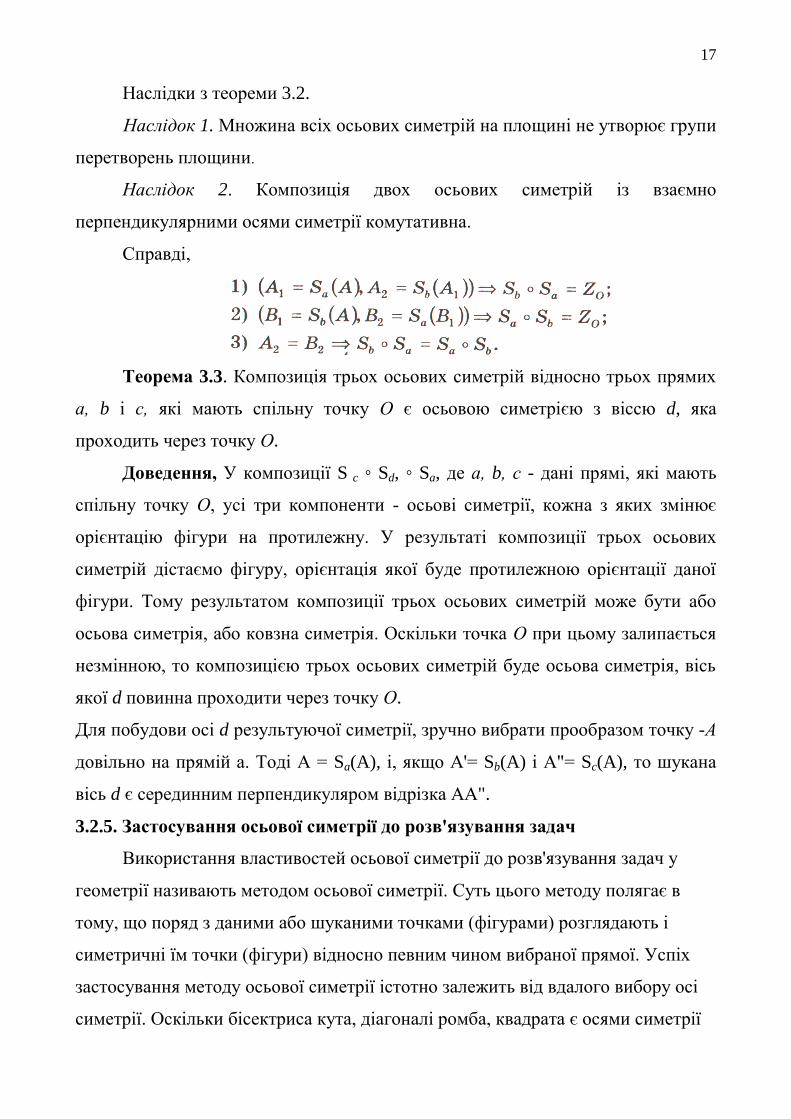
17
Наслідки з теореми 3.2.
Наслідок 1. Множина всіх осьових симетрій на площині не утворює групи
перетворень площини.
Наслідок 2. Композиція двох осьових симетрій із взаємно
перпендикулярними осями симетрії комутативна.
Справді,
Теорема 3.3. Композиція трьох осьових симетрій відносно трьох прямих
а, b і с, які мають спільну точку О є осьовою симетрією з віссю d, яка
проходить через точку О.
Доведення, У композиції S c ◦ Sd, ◦ Sa, де а, b, с - дані прямі, які мають
спільну точку О, усі три компоненти - осьові симетрії, кожна з яких змінює
орієнтацію фігури на протилежну. У результаті композиції трьох осьових
симетрій дістаємо фігуру, орієнтація якої буде протилежною орієнтації даної
фігури. Тому результатом композиції трьох осьових симетрій може бути або
осьова симетрія, або ковзна симетрія. Оскільки точка О при цьому залипається
незмінною, то композицією трьох осьових симетрій буде осьова симетрія, вісь
якої d повинна проходити через точку О.
Для побудови осі d результуючої симетрії, зручно вибрати прообразом точку -А
довільно на прямій а. Тоді А = Sa(A), і, якщо А'= Sb(A) і А"= Sc(A), то шукана
вісь d є серединним перпендикуляром відрізка АА".
3.2.5. Застосування осьової симетрії до розв'язування задач
Використання властивостей осьової симетрії до розв'язування задач у
геометрії називають методом осьової симетрії. Суть цього методу полягає в
тому, що поряд з даними або шуканими точками (фігурами) розглядають і
симетричні їм точки (фігури) відносно певним чином вибраної прямої. Успіх
застосування методу осьової симетрії істотно залежить від вдалого вибору осі
симетрії. Оскільки бісектриса кута, діагоналі ромба, квадрата є осями симетрії

18
відповідних фігур, то метод симетрії застосовують до задач, що включають в
число даних елементів положення осей симетрії фігури.
Задачі на обчислення
Задача 3.1. На відрізку АE взято точки В, С, D так, що АВ = DE = 2, ВС =
CD =1. 3 точки М, яка не лежить на прямій АE, відрізки АВ, ВС, CD, DE видно
під рівними кутами. Знайти кут AME.
Розв'язання, Нехай на відрізку АЕ взято точки В, C,D) такі, що АВ = DE
= 2, ВС = CD = 1 (рис. 3.20). Проведемо через точку С пряму CN,
перпендикулярну відрізку АE. Тоді точки В і D, А і Е попарно симетричні
відносно прямої CN = l. Тому точка М повинна лежати на прямій CN.
За умовою задачі кут AMB = куту BMC = куту CMD = куту DME.
Звідси випливає, що прямі MB і MD є бісектрисами кутів АМС і ЕМС
прямокутних трикутників АМС і ЕМС. За властивістю бісектриси MB кута АМС
трикутника АМС
Отже, катет МС удвічі менший гіпотенузи AM, тому ZMAB = 30°, тоді кут
AMC = 60°.
Кут ЕМС симетричний куту АМС відносно прямої CN, тому кут EMC-60".
Отже, кут AME = кут AMC + кут EMC = 120°.
Рис. 3.20
Задача 3.2. Осями симетрій ромба є осі координат. Серединою однією
сторони ромба є точка М (2; 3). Знайти координати вершин ромба.
Розв'язання. Оскільки осі координат є осями симетрії ромба, а осі
симетрії ромба містять діагоналі ромба, то його вершини лежать на осях
координат.

19
Нехай ABCD - ромб, його вершини А і С лежать на осі абсцис, а точки В і
С) - на осі ординат (рис. 3.21). Тоді вершини ромба матимуть координати А (х;
0), В (0; у) С (-х; 0), D (0; -у). Розглянемо прямокутний трикутник АВО, точка М
(2; 3) є серединою гіпотенузи АВ. За властивістю медіани прямокутного
трикутника, яка виходить з вершини прямого кута:
Відстань точки М від початку координат:
Рис. 3.21
Оскільки AM = ОМ, то АМ² =(х - 2)² + 9 = 13. Звідси х = 4, Отже, а точки
А дорівнює 4: А (4; 0).
Точка С симетрична точці А відносно осі ординат, тому її абсциса
дорівнює -4: С (-4; 0).
Оскільки ОМ = ВМ, то ВМ² = ОМ² = 4 + (у -3)² = 13. Звідси у = 6. Отже,
ордината точки В дорівнює 6: В (0; 6). Точка D симетрична точці В відносно осі
абсцис, тому ордината точки D дорівнює -6: D (0; -6).
Відповідь. А (4; 0), В (0; 6), С (-4; 0), D (0; -6).
Задача 3.З. Побудувати пряму, симетричну прямій у = 2х + 1 відносно
осі ординат, і записати її рівняння.
Розв'язання. Дана пряма проходить через точки А (0; 1), В (-0,5; 0). У
симетрії відносно осі ординат точка А відповідає сама собі, а точка В перейде в
їй симетричну відносно осі Оу точку В'(0,5; 0). Отже, пряма АВ' = l шукана
(рис. 3.22)

20
Залежність між координатами симетричних відносно осі OY точок
виражається формулами х' = -х, у' = у. Тому рівняння прямої l΄ матиме вигляд у
= -2х + 1.
Рис. 3.22
Задача 3.4. Діагоналі прямокутника лежать на прямих у = 3x і у = -3x. Одна
із сторін проходить через точку (2; 6). Знайти координати вершин прямо-
кутника.
Розв'язання, Побудуємо прямі у = Зх і у = -Зх, це прямі ОА і ОВ (рис.
3.23).
Осями симетрії прямокутника є координатні осі х і у тому сторони
прямокутника паралельні координатним осям.
Рівняння сторони АВ х = 2, сторони АС y = 6, сторони CD x = -2, сторони
BD у = -6.
Координати вершин В,С, D знаходимо за властивостями симетрій відносно
осей координат: В (2; -6), С (-2; 6), D (-2; -6).
Рис. 3.23
21
Задача 3.5. Не будуючи самих прямих, визначити координати точок,
симетричних відносно осі абсцис і розмішених на прямих
у = 3х + 6іу =-2х+ 2.
Розв'язання. Нехай точки А (а; b) і А' (а; -b) симетричні відносно осі
абсцис і належать відповідно прямим y = 3x + 5 i y = -2х + 2.
Тоді маємо систему
Звідси а = -7; b = -16. Шукані точки: А (-7; -16) і А' (-7; 16).
Задача 3.6. Записати рівняння прямої, яка симетрична прямій ах + by+ с =
0 відносно осі абсцис.
Розв'язання. Симетрія відносно осі абсцис виражається формулами
Підставивши ці значення в дане рівняння, дістанемо:
ах + b(-у) + с = О, або ax - by + с = 0.
3адачі на доведення
Задача 3.7. Довести, що образ будь-якої точки А в симетрії відносно
даної прямої l можна побудувати за допомогою лише одного циркуля.
Розв'язання. Нехай пряма l - вісь симетрії, А - довільна точка площини,
що не належить l (рис. 3.24). Проведемо дугу з центром у точці А радіусом,
більшим відстані від А до l В і С - точки перетину цієї дуги з прямою l. Цим
самим радіусом з центрами в точках В і С проведемо дуги кіл, які перетнуться в
точці А΄ Покажемо, що точка А' симетрична точці А в симетрії відносно прямої
l.
Справді, у трикутників ABA' і АСА' АВ = АС, ВА΄ = СА΄ АА΄ - спільна
сторона, тому , кут АВА' = куту AСА΄. Звідси випливає рівність кутів ВАА' і
САА΄. Тоді кут АВD = куту ACD і куту ADB = куту ADC = 90° - як суміжні
рівні, тобто АА' = ВС. З рівності трикутників ACD і A'CD (прямокутні за
гіпотенузою АС = СА' і спільним катетом CD) випливає, що AD = A'D. З того
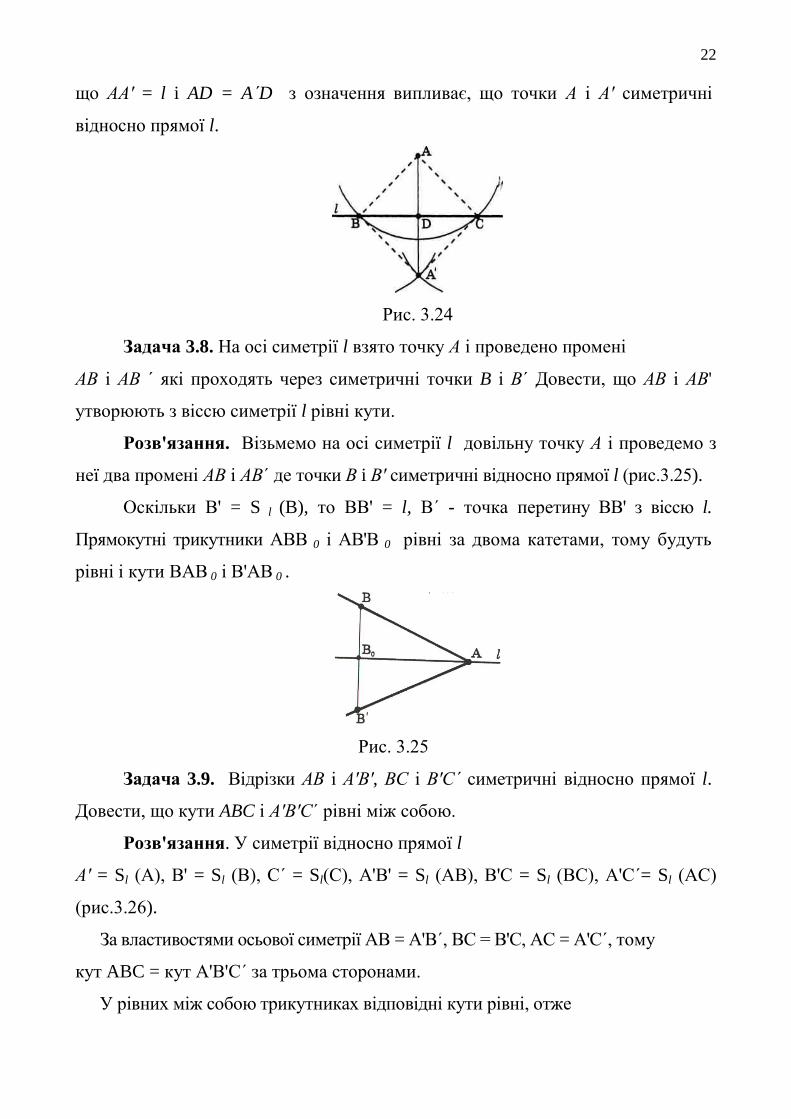
22
що АА' = l i AD = A΄D з означення випливає, що точки А і А' симетричні
відносно прямої l.
Рис. 3.24
Задача 3.8. На осі симетрії l взято точку А і проведено промені
АВ і АВ ΄ які проходять через симетричні точки B і В΄ Довести, що АВ і АВ'
утворюють з віссю симетрії l рівні кути.
Розв'язання. Візьмемо на осі симетрії l довільну точку А і проведемо з
неї два промені АВ і АВ΄ де точки В i В' симетричні відносно прямої l (рис.3.25).
Оскільки В' = S l (B), то ВВ' = l, В΄ - точка перетину ВВ' з віссю l.
Прямокутні трикутники АВВ 0 і АВ'В 0 рівні за двома катетами, тому будуть
рівні і кути ВАВ 0 і В'АВ 0 .
Рис. 3.25
Задача 3.9. Відрізки АВ і А'В', ВС і В'С΄ симетричні відносно прямої l.
Довести, що кути ABC і А'В'С΄ рівні між собою.
Розв'язання. У симетрії відносно прямої l
А' = Sl (А), В' = Sl (В), С΄ = Sl(С), А'В' = Sl (АВ), В'С = Sl (ВС), А'С΄= Sl (АС)
(рис.3.26).
За властивостями осьової симетрії АВ = А'В΄, ВС = В'С, АС = А'С΄, тому
кут ABC = кут А'В'С΄ за трьома сторонами.
У рівних між собою трикутниках відповідні кути рівні, отже
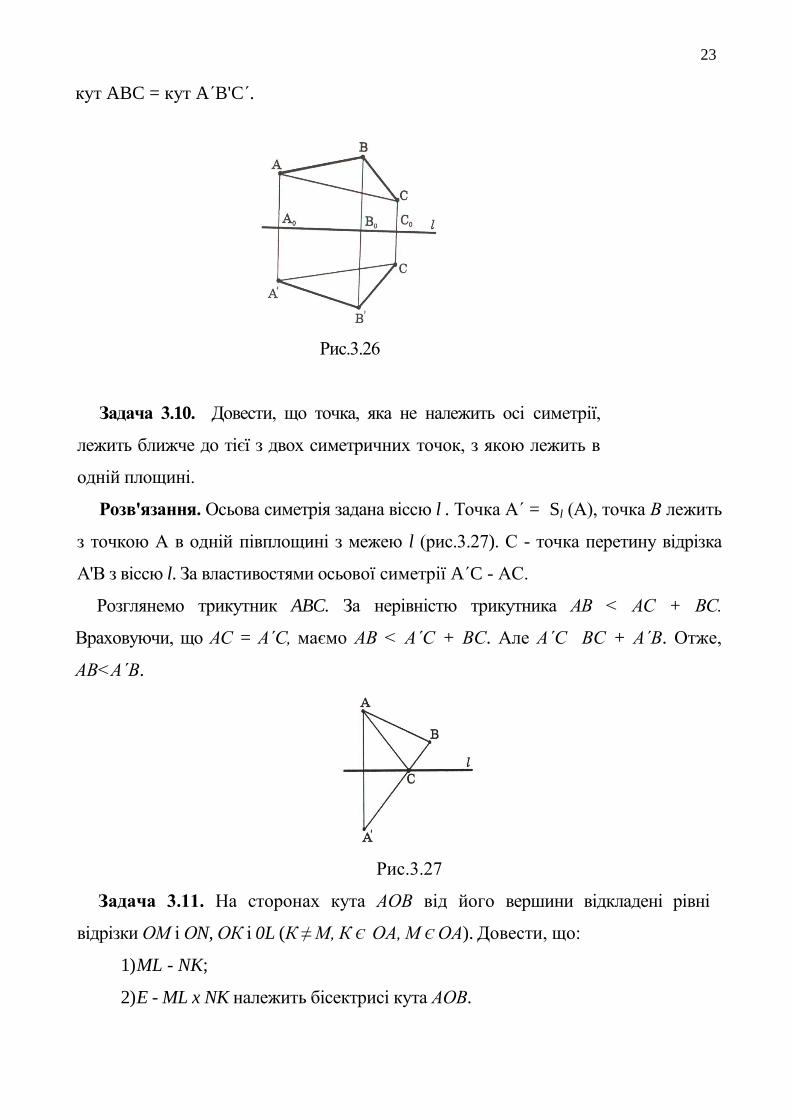
23
кут ABC = кут A΄B'C΄.
Рис.3.26
Задача 3.10. Довести, що точка, яка не належить осі симетрії,
лежить ближче до тієї з двох симетричних точок, з якою лежить в
одній площині.
Розв'язання. Осьова симетрія задана віссю l . Точка А΄ = Sl (А), точка В лежить
з точкою А в одній півплощині з межею l (рис.3.27). С - точка перетину відрізка
А'В з віссю l. За властивостями осьової симетрії A΄C - АС.
Розглянемо трикутник ABC. За нерівністю трикутника АВ < АС + ВС.
Враховуючи, що АС = А΄С, маємо АВ < А΄С + ВС. Але А΄С ВС + А΄В. Отже,
АВ<А΄В.
Рис.3.27
Задача 3.11. На сторонах кута АОВ від його вершини відкладені рівні
відрізки ОМ і ОN, ОК і 0L (К ≠ М, К Є ОА, М Є ОА). Довести, що:
1) ML - NK;
2) E - ML x NK належить бісектрисі кута АОВ.
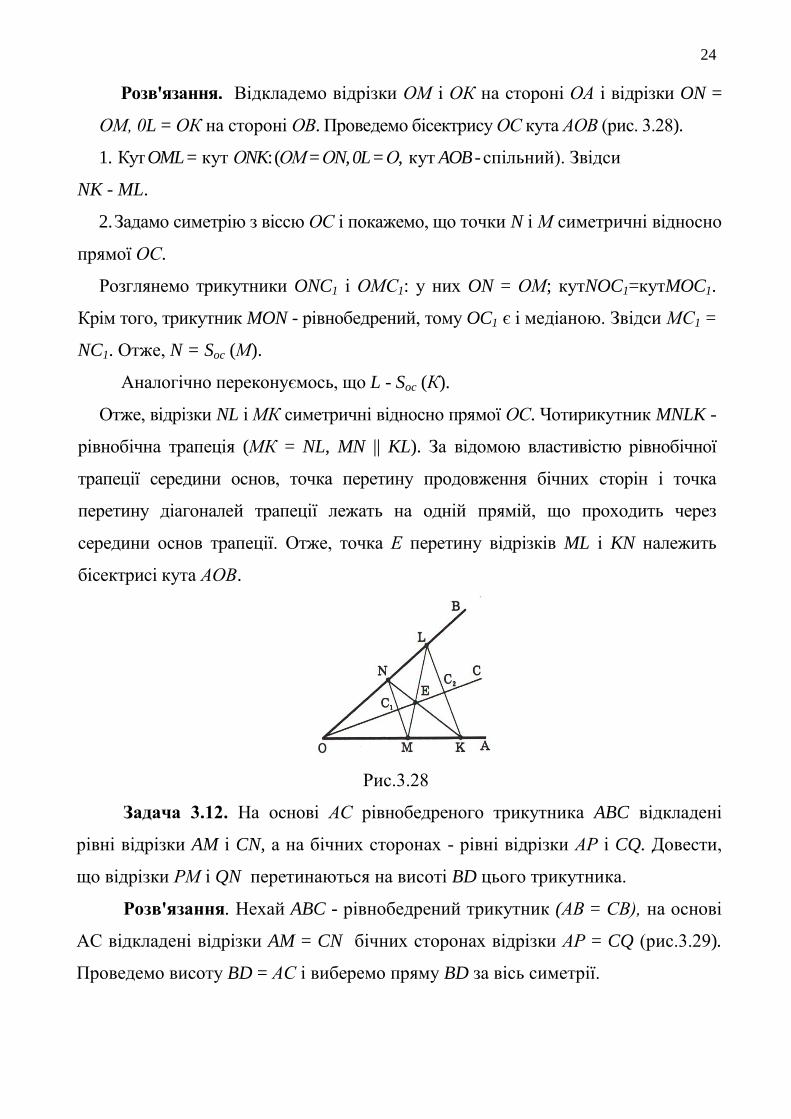
24
Розв'язання. Відкладемо відрізки ОМ і ОК на стороні ОА і відрізки ON =
ОМ, 0L = ОК на стороні ОВ. Проведемо бісектрису ОС кута АОВ (рис. 3.28).
1. Кут OML = кут ОNK: (ОМ = ОN, 0L = О, кут AOB - спільний). Звідси
NK - ML.
2. Задамо симетрію з віссю ОС і покажемо, що точки N і М симетричні відносно
прямої ОС.
Розглянемо трикутники ONC1 і ОМС1: у них ON = ОМ; кутNOC1=кутMOC1.
Крім того, трикутник MON - рівнобедрений, тому OC1 є і медіаною. Звідси МС1 =
NC1. Отже, N = Soc (М).
Аналогічно переконуємось, що L - Soc (К).
Отже, відрізки NL і МК симетричні відносно прямої ОС. Чотирикутник MNLK -
рівнобічна трапеція (МК = NL, MN || KL). За відомою властивістю рівнобічної
трапеції середини основ, точка перетину продовження бічних сторін і точка
перетину діагоналей трапеції лежать на одній прямій, що проходить через
середини основ трапеції. Отже, точка Е перетину відрізків ML і KN належить
бісектрисі кута АОВ.
Рис.3.28
Задача 3.12. На основі АС рівнобедреного трикутника ABC відкладені
рівні відрізки AM і CN, а на бічних сторонах - рівні відрізки АР і CQ. Довести,
що відрізки РМ і QN перетинаються на висоті BD цього трикутника.
Розв'язання. Нехай ABC - рівнобедрений трикутник (АВ = СВ), на основі
АС відкладені відрізки AM = CN бічних сторонах відрізки АР = CQ (рис.3.29).
Проведемо висоту BD = АС і виберемо пряму BD за вісь симетрії.
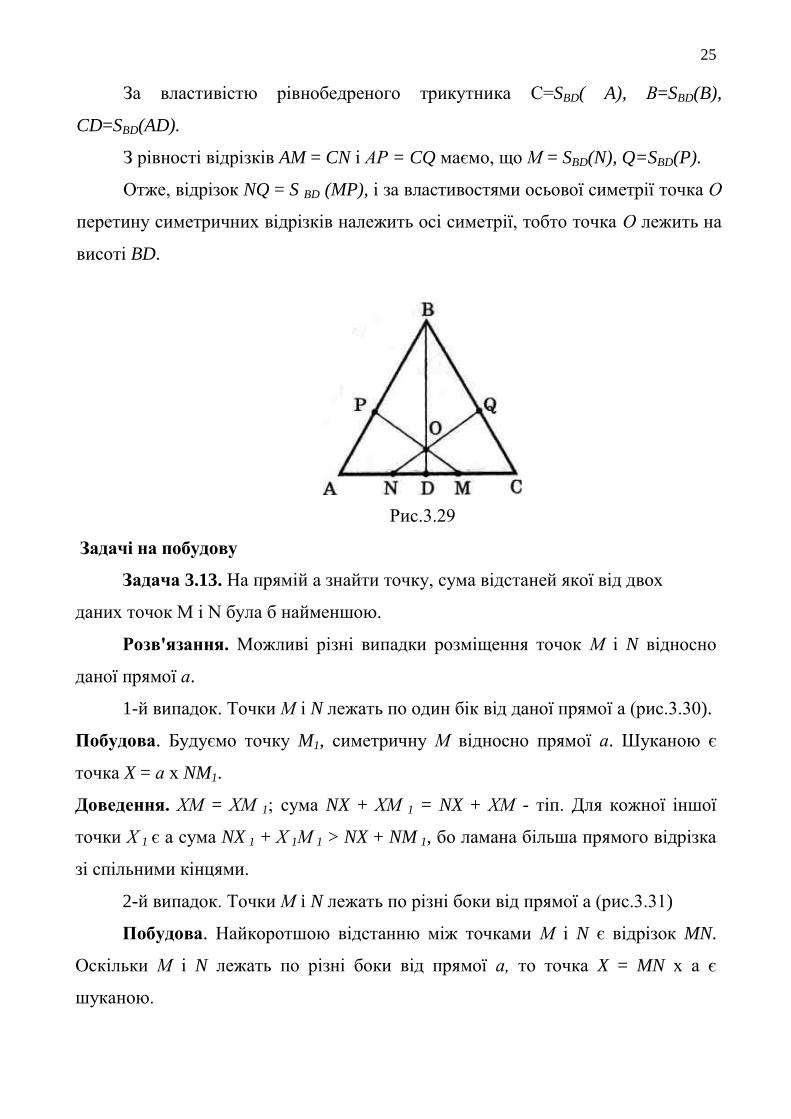
25
За властивістю рівнобедреного трикутника С=SBD( A), В=SBD(B),
CD=SBD(AD).
З рівності відрізків AM = CN і АР = CQ маємо, що М = SBD(N), Q=SBD(P).
Отже, відрізок NQ = S BD (MP), і за властивостями осьової симетрії точка О
перетину симетричних відрізків належить осі симетрії, тобто точка О лежить на
висоті BD.
Рис.3.29
Задачі на побудову
Задача 3.13. На прямій а знайти точку, сума відстаней якої від двох
даних точок М і N була б найменшою.
Розв'язання. Можливі різні випадки розміщення точок М і N відносно
даної прямої а.
1-й випадок. Точки М і N лежать по один бік від даної прямої а (рис.3.30).
Побудова. Будуємо точку M1, симетричну М відносно прямої а. Шуканою є
точка X = а х NM1.
Доведення. ХМ = ХМ 1; сума NX + ХМ 1 = NX + ХМ - тіп. Для кожної іншої
точки Х 1 є а сума NX 1 + Х 1М 1 > NX + NM 1, бо ламана більша прямого відрізка
зі спільними кінцями.
2-й випадок. Точки М i N лежать по різні боки від прямої а (рис.3.31)
Побудова. Найкоротшою відстанню між точками М і N є відрізок MN.
Оскільки М і N лежать по різні боки від прямої а, то точка X = MN х а є
шуканою.
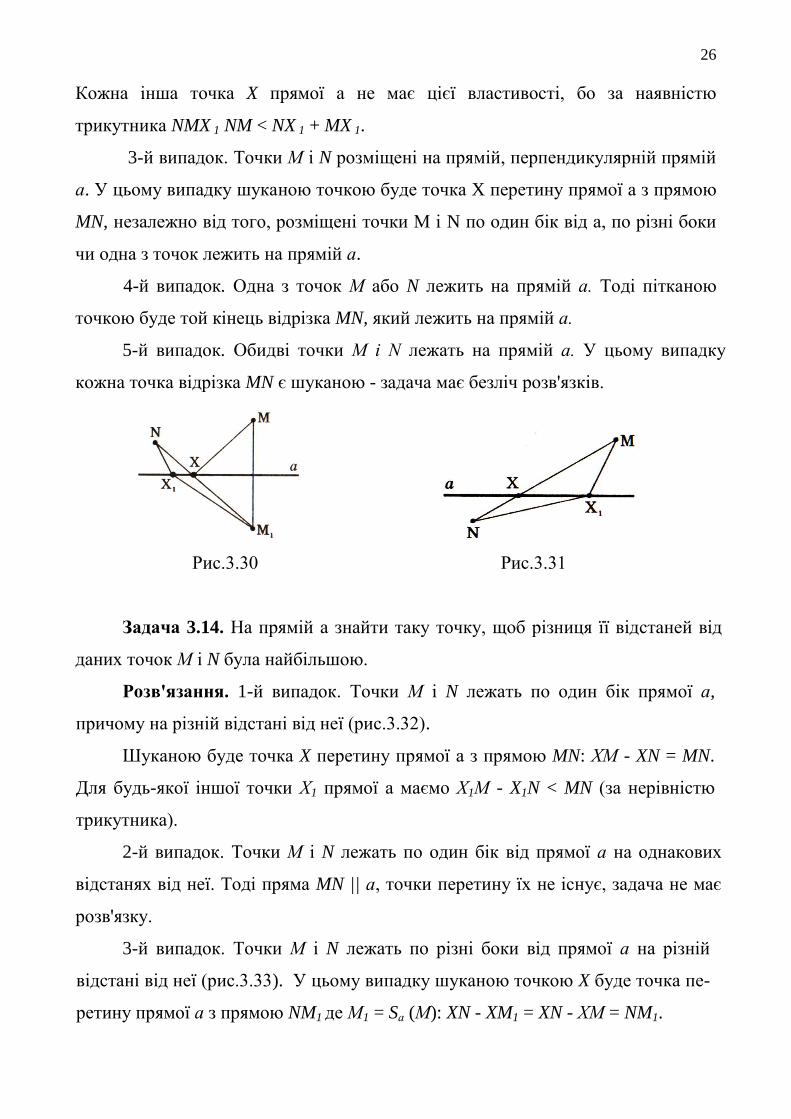
26
Кожна інша точка X прямої а не має цієї властивості, бо за наявністю
трикутника NMX 1 NM < NX 1 + MX 1.
3-й випадок. Точки М і N розміщені на прямій, перпендикулярній прямій
а. У цьому випадку шуканою точкою буде точка X перетину прямої а з прямою
MN, незалежно від того, розміщені точки М і N по один бік від а, по різні боки
чи одна з точок лежить на прямій а.
4-й випадок. Одна з точок М або N лежить на прямій а. Тоді пітканою
точкою буде той кінець відрізка MN, який лежить на прямій а.
5-й випадок. Обидві точки М і N лежать на прямій а. У цьому випадку
кожна точка відрізка MN є шуканою - задача має безліч розв'язків.
Рис.3.30 Рис.3.31
Задача 3.14. На прямій а знайти таку точку, щоб різниця її відстаней від
даних точок М і N була найбільшою.
Розв'язання. 1-й випадок. Точки М і N лежать по один бік прямої а,
причому на різній відстані від неї (рис.3.32).
Шуканою буде точка X перетину прямої а з прямою MN: ХМ - XN = MN.
Для будь-якої іншої точки Х1 прямої а маємо Х1М - X1N < MN (за нерівністю
трикутника).
2-й випадок. Точки М і N лежать по один бік від прямої а на однакових
відстанях від неї. Тоді пряма MN || а, точки перетину їх не існує, задача не має
розв'язку.
3-й випадок. Точки М і N лежать по різні боки від прямої а на різній
відстані від неї (рис.3.33). У цьому випадку шуканою точкою X буде точка пе-
ретину прямої а з прямою NM1 де М1 = Sа (М): XN - XM1 = XN - ХМ = NM1.
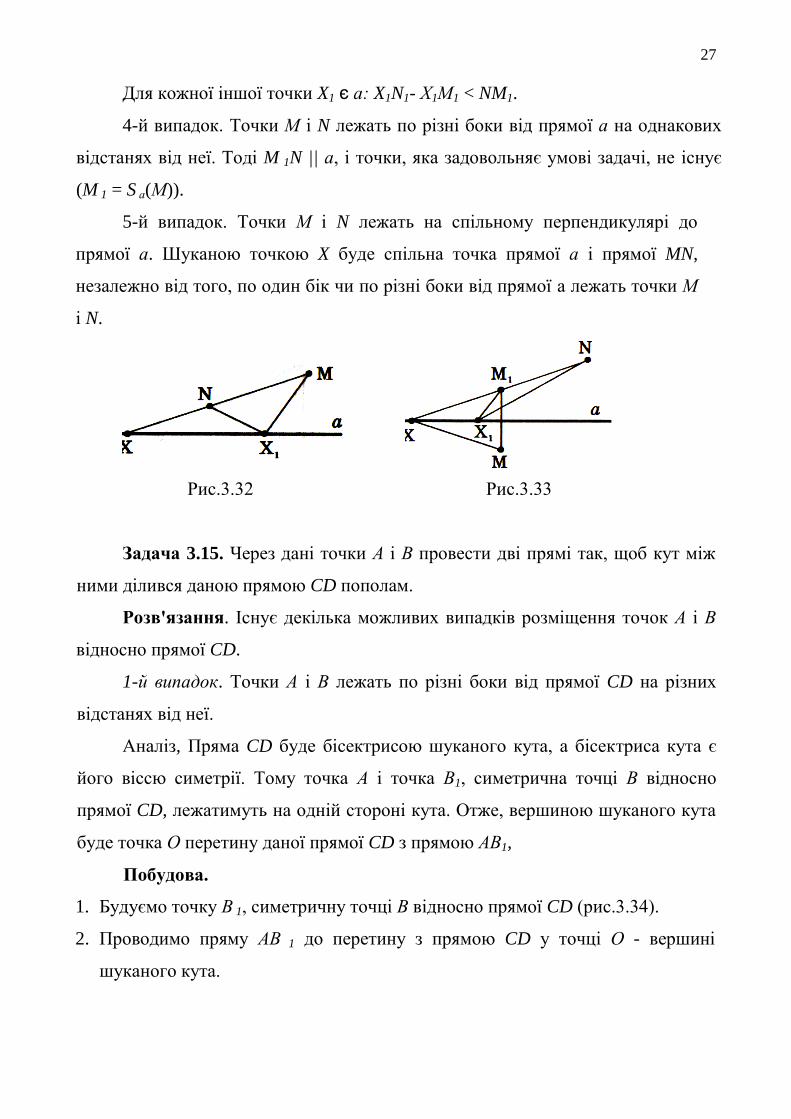
27
Для кожної іншої точки X1 є а: X1N1- Х1М1 < NM1.
4-й випадок. Точки М і N лежать по різні боки від прямої а на однакових
відстанях від неї. Тоді M 1N || а, і точки, яка задовольняє умові задачі, не існує
(M 1 = S а(М)).
5-й випадок. Точки М і N лежать на спільному перпендикулярі до
прямої а. Шуканою точкою X буде спільна точка прямої а і прямої MN,
незалежно від того, по один бік чи по різні боки від прямої а лежать точки М
і N.
Рис.3.32 Рис.3.33
Задача 3.15. Через дані точки А і В провести дві прямі так, щоб кут між
ними ділився даною прямою CD пополам.
Розв'язання. Існує декілька можливих випадків розміщення точок А і В
відносно прямої CD.
1-й випадок. Точки А і В лежать по різні боки від прямої CD на різних
відстанях від неї.
Аналіз, Пряма CD буде бісектрисою шуканого кута, а бісектриса кута є
його віссю симетрії. Тому точка А і точка В1, симетрична точці В відносно
прямої CD, лежатимуть на одній стороні кута. Отже, вершиною шуканого кута
буде точка О перетину даної прямої CD з прямою АВ1,
Побудова.
1. Будуємо точку В 1, симетричну точці В відносно прямої CD (рис.3.34).
2. Проводимо пряму АВ 1 до перетину з прямою CD у точці О - вершині
шуканого кута.

28
Проводимо промінь ОВ. Кут АОВ - шуканий. Доведення і дослідження
випливають з аналізу. Задача має завжди один розв'язок.
2-й випадок. Точки А і В лежать по різні боки від прямої CD на рівних
відстанях від неї і CD = AB (рис.3.35).
У цьому випадку задача має безліч розв'язків: будь-яку точку прямої CD
можна взяти за вершину шуканого кута, бо точки О1, О 2 і т.д. рівновіддалені від
даних точок А і В, трикутники О1АВ, О2 АВ і т.д. рівнобедрені, пряма CD ділить
кути АО1В, АО2В і т.д. пополам.
3-й випадок. Точки А і В лежать по різні боки від прямої CD на однаковій
відстані від неї, але пряма CD не перпендикулярна до відрізка АВ. Задача не
має розв'язку, бо пряма АВ 1, де В 1 = S СD (В), паралельна CD точки перетину їх
не існує.
4-й випадок. Точки А і В лежать по один бік від прямої CD, або
одна з них належить прямій CD. У цих випадках М задача не має розв'язку.
Рис.3.34 Рис.3.35
Задача 3.16. Побудувати вісь симетрії двох даних точок.
Розв’язання. Побудова. Нехай дано дві точки А і А' (рис.3.36). Для
побудови прямої, відносно якої точки були б симетричні, досить знайти дві
точки, які їй належать. Для їх знаходження опишемо з точки А як з центра раді-
усом, більшим від половини відстані АА', коло. З точки А' тим самим радіусом
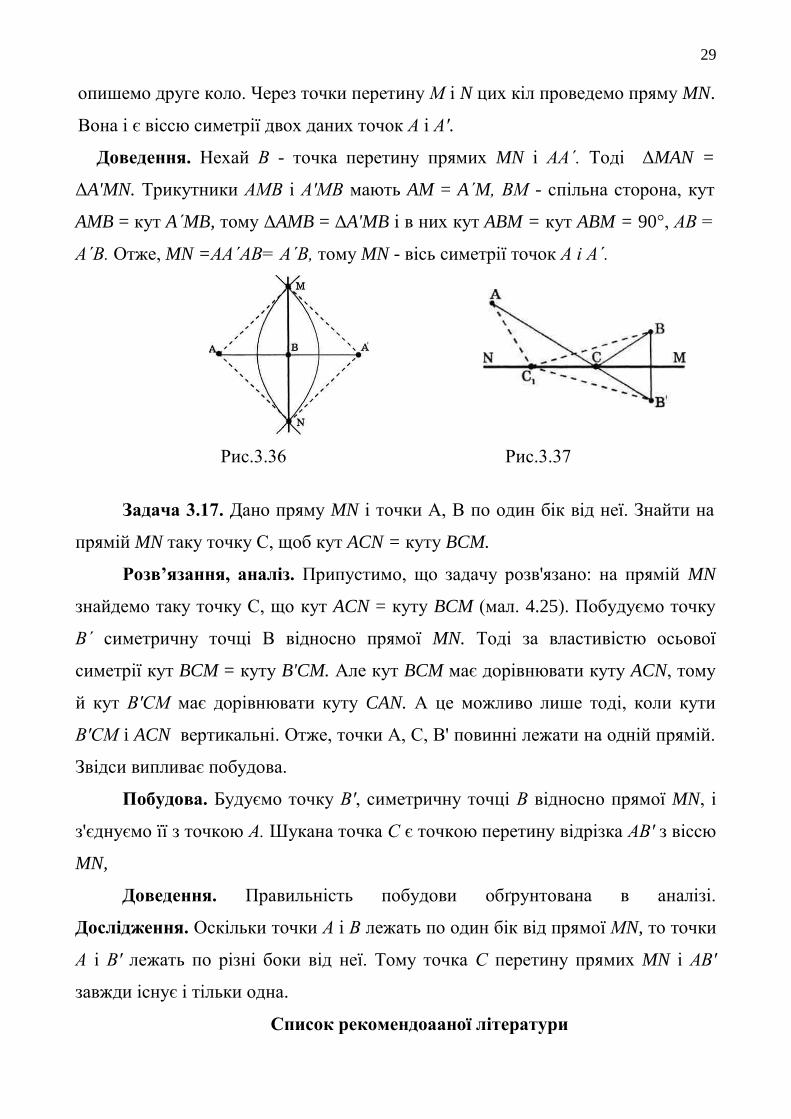
29
опишемо друге коло. Через точки перетину М і N цих кіл проведемо пряму MN.
Вона і є віссю симетрії двох даних точок А і А'.
Доведення. Нехай В - точка перетину прямих MN і АА΄. Тоді ΔMAN =
ΔA'MN. Трикутники АМВ і А'МВ мають AM = A΄M, ВМ - спільна сторона, кут
AMB = кут A΄MB, тому ΔAMB = ΔA'MB і в них кут ABM = кут ABM = 90°, АВ =
А΄В. Отже, MN =АА΄АВ= А΄В, тому MN - вісь симетрії точок А і А΄.
Рис.3.36 Рис.3.37
Задача 3.17. Дано пряму MN і точки А, В по один бік від неї. Знайти на
прямій MN таку точку С, щоб кут ACN = куту BCM.
Розв’язання, аналіз. Припустимо, що задачу розв'язано: на прямій MN
знайдемо таку точку С, що кут ACN = куту BCM (мал. 4.25). Побудуємо точку
В΄ симетричну точці В відносно прямої MN. Тоді за властивістю осьової
симетрії кут BCM = куту B'CM. Але кут BCM має дорівнювати куту ACN, тому
й кут В'СМ має дорівнювати куту CAN. А це можливо лише тоді, коли кути
В'СМ i ACN вертикальні. Отже, точки А, С, В' повинні лежати на одній прямій.
Звідси випливає побудова.
Побудова. Будуємо точку В', симетричну точці В відносно прямої MN, і
з'єднуємо її з точкою А. Шукана точка С є точкою перетину відрізка АВ' з віссю
MN,
Доведення. Правильність побудови обґрунтована в аналізі.
Дослідження. Оскільки точки А і В лежать по один бік від прямої МN, то точки
А і В' лежать по різні боки від неї. Тому точка С перетину прямих MN і АВ'
завжди існує і тільки одна.
Список рекомендоааної літератури
30
1. Борисенко О. А. Аналітична геометрія. [Текст] / О. А. Борисенко,
Л. М. Ушакова. – Х.: Вид-во „ Освіта ” при Харк. ун-ті, 1993.
2. Боровик В.Н. Геометричні перетворення площини. [Текст] /
В.Н. Боровик, І.В. Зайченко, М.М. Мурач, В.П. Яковець – Суми : Університет.
книга, 2003. - 504с
3. Вейль Г. Симетрія / Г. Вейль. – Москва: "Едіторіал УРСС", 2003.
4. Вишенський В. А. Збірник задач з математики: Навч. посібник. — 2-ге вид.,
доп. / В. А. Вишенський, М. О. Перестюк, А. М. Самойленко. — К.: Либідь,
1993. — 344 с.
5. Гельфанд І.М. Функції і графіки (Базові приклади). - 6-те вид., перепрац. /
І.М. Гельфанд, Е.Г. Глаголієва, Е.Е. Шноль. - М.: Москва «МЦНМО» 2004р. -
120стор.: ілюстроване
6. Глейзер Г. І. Історія математики в школі IX - X класи. / Г. І. Глейзер. –
Москва: «Просвещение», 1983. – 351 с
7. Погорелов А.В. Геометрия. [Текст] / – М.: Наука, 1984.
8. Тарасов Л. В. Цей дивно симетричний світ / Л. В. Тарасов. – Москва:
Просвещение, 1982.
9. Ципкин А. Г. Довідник з математики для середніх навчальних закладів / А. Г.
Ципкин. – Москва: «Наука», 1984. – 480 с
10. http://shkolyar.in.ua/podibnist-fugur/peretvorennya
11. http://school.home-task.com/paralelne-perenesennya/
12. http://shkolyar.in.ua/podibnist-fugur/peretvorennya
13.https://upload.wikimedia.org/wikipedia/commons/e/ed/Point_circle.png
14. http://svitppt.com.ua/images/32/31169/770/img21.jpg
15.http://ito.vspu.net/ENK/2011-2012/MZN_2011-
2012/mzn_imfito/Stud_rob/2014/Magdich/images/image022.png