Embed Size (px)
Citation preview

ロボット介護機器の力学的効果評価
- デジタルヒューマンとヒューマノイドを用いた定量的評価 -
産業技術総合研究所
○吉田 英一 遠藤 維 多田 充徳 吉安 祐介
鮎澤 光 松本 吉央 本間 敬子 梶谷 勇
1

計測フロンティア研究部門
2
発表内容
1. 背景研究開発の背景
2. 力学的効果評価の概要
3. 研究開発内容
4. 今後の展望

ロボット介護機器開発のV字モデル
要件定義
プロトタイプ作成
システム検証
モジュール試験
機構・制御部 安全関連部 システム設計
ハード・ソフト設計
効果安全目標
有用性・安全性に関する機能要求 有用性・安全性に関する性能要求
モジュール化設計
ハード・ソフト試験
妥当性確認
一日の生活の中での課題の明確化
目標となる「活動」の明確化
要素動作の明確化
「している活動」での検証
要素動作での検証
開発コンセプトシート
・メリット・デメリット (短期的・長期的) (被介護者・介護者、 施設全体) ・適応と禁忌 ・使い方
工学システム
人との関係
項目と具体的内容
「参加」の具体像としての「活動」
「できる活動」での検証
効果安全目標
関係する範囲
事業計画: 性能評価試験手法・装置の開発
目標:人間がロボット介護機器を使用する状況を再現し、その力学的な効果を定量的に評価する手法を開発

計測フロンティア研究部門
4
発表内容
1. 研究開発の背景
2. 力学的効果評価の概要
3. 研究開発内容
4. 今後の展望

計測フロンティア研究部門
5
力学的効果評価の概要
• 効果:使う人間と機器(性能) の関わりで生じる
↓
• 「効果」を評価する手法を新たに開発
要件定義
有用性・安全性に関する機能要求 有用性・安全性に関する性能要求
妥当性確認
要素動作の明確化 要素動作での検証
工学システム
人との関係
要素動作の測定
人間による使用状況を模擬
• デジタルヒューマン
• ロボット
効果の定量評価
機器の機械的性能
効果基準
設計改良支援
基準コンソーシアム
開発事業者

計測フロンティア研究部門
6
力学面での評価:開発目標
• 定量的評価指標・基準の提案
–主な対象:機械的インタラクションのある移乗支援
–介護者 (装着型) :
腰部負担の低減
–被介護者 (非装着型) :
圧力、接触力、せん断力、筋出力
• 機器評価のためのツール群の提供
–被験者・主観評価 → ロボット・デジタルヒューマン活用

計測フロンティア研究部門
7
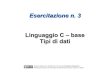
デジタルヒューマンとロボットを用いた力学面での効果評価
機器
モデル
デジタルヒューマン
物理相互作用モデル
介護者 被介護者
筋骨格モデル
筋活動
圧力
接触力
ロボット介護機器の
効果定量評価
目的
ロボット
腰部負担
圧力
接触力
せん断力

計測フロンティア研究部門
8
発表内容
1. 研究開発の背景
2. 力学的効果評価の概要
3. 研究開発内容
4. 今後の展望

開発した基盤技術
• デジタルヒューマン技術
–モーションキャプチャの計測データから個人の人体モデルと運動を再現
–機器と人間とのインタラクションのモデル化
• ヒューマノイド技術
–計測した人体動作の再現
–機器装着時の負担軽減効果の定量的評価

計測フロンティア研究部門
10
人体シミュレータの実装
• 人体シミュレーションソフトウェア「DhaibaWorks」
– 全身運動への拡張
– 測定した人体運動データから人体モデル・運動を再現
• 腰部等負担の推定
– 機器等からの外力追加機能の追加
– 人体モデル・運動データをOpenSimで利用可能な形で出力、各関節トルクを評価

計測フロンティア研究部門
11
身体3次元モデル (データベース) 機器3次元モデル
機器と人間とのインタラクション: 接触・圧力
変形モデル
(バネモデル等)
ばね
装着型機器
Input:姿勢
皮膚モデル
表面形状推定
圧力推定
干渉検出
機器力学計算 圧力分布
変形
インタラクション

腰の負荷 [Nm]
時間 [秒]
装着
非装着
ヒューマノイドによる装着支援機器評価
• 人間に近い構造・寸法(平均から誤差10%以内)
• 計測した人動作の再現
• 負荷低減効果の定量的検証(人では難しい)
• 高い繰り返し精度、倫理的なリスクのクリア
Z
“スマートスーツ”
(北大)
人間動作測定とシミュレーション
[Miura ICRA 2013]
腰負担
測定

発表内容
1. 研究開発の背景
2. 力学的効果評価の概要
3. 研究開発内容
4. 今後の展望

今後の計画
• 力学的効果の評価指標の抽出
–使用する人間との関係での「効果」を定量的に評価
• 介護者 : 腰部負担の低減
• 被介護者: 圧力、接触力、せん断力、筋出力
• 具体的な機器での評価
–要素動作の明確化、測定と再現
• 効果の基準策定への貢献







![[吉他新手班#3] 打擊吉他](https://img.pdfslide.tips/doc/110x75/55661ff8d8b42a61238b4a4e/3-55661ff8d8b42a61238b4a4e.jpg)







![[吉他新手班#5] 決戰吉他](https://img.pdfslide.tips/doc/110x75/55ac0f0b1a28ab3f148b45ef/5-55ac0f0b1a28ab3f148b45ef.jpg)










