Embed Size (px)
DESCRIPTION
§3 比值控制系统. 一、比值控制原理. 在石化、制药等生产过程中,经常要两种或两种以上的物料保持一定的比例关系。 燃烧过程:燃料与空气要保持一定比例,才能满足生产和环保要求。 造纸过程:浓纸浆与水要以一定比例混合,才能制造出合格的纸浆。 不少化学反应过程,多个进料要保持一定的比例。. 基本概念与原理. 比值控制中,需要保持比例的两种物料: 处于主导地位的称为主动量,通常用 F M 表示,如燃烧中的燃料量。 另一种物料称为从动量,用 F S 表示,如燃烧比值系统中的空气(氧气)量。 比值控制系统要实现: F S /F M = k - PowerPoint PPT Presentation
Citation preview

§3 比值控制系统

一、比值控制原理 在石化、制药等生产过程中,经常要两种或两种以上的物料保持一定的比例关系。燃烧过程:燃料与空气要保持一定比例,才能满足生产和环保要求。造纸过程:浓纸浆与水要以一定比例混合,才能制造出合格的纸浆。不少化学反应过程,多个进料要保持一定的比例。

基本概念与原理 比值控制中,需要保持比例的两种物料:处于主导地位的称为主动量,通常用 FM 表示,如燃烧中的燃料量。另一种物料称为从动量,用 FS 表示,如燃烧比值系统中的空气(氧气)量。 比值控制系统要实现: FS/FM=k
k 为从动量与主动量的比值。

比值控制系统:凡是用来实现两个或两个以上的物料量按一定比例关系以达到某种控制目的的控制系统。因此,比值控制系统是按照功能来命名的。 常用的比值控制系统有:( 1 )单闭环比值控制系统( 2 )双闭环比值控制系统( 3 )变比值控制系统

图 9 - 12 燃烧过程比值控制系统

二、几种比值控制系统 1 、单闭环比值控制系统 如图 9 - 12 所示。从结构上看,似乎与串级控制系统很相似。但它们的方框图是不同的,如图 9 - 13 所示,而且功能也不同。

图 9 - 13 单闭环比值控制系统方框图及与串级控制系统比较
控制器 控制阀

与串级控制比较 单闭环比值控制系统无主对象、主控制器。并且从动量不会影响主动量。 串级控制系统中,副变量是操纵变量到被控变量之间总对象的一个中间变量,该变量是主对象的输入,通过改变副被控变量来调节主被控变量。 串级控制的副环与比值控制系统的从动量控制子系统都是随动控制系统。

比值控制系统中,从动量控制系统是随动控制系统,其设定值由系统外部的 kFM
提供,其任务就是使从动量 FS 尽可能地保持与 KFM 相等,随着 FM 的变化,始终保持 FM
与 FS 的比值关系。 在系统稳定时,该比值是比较精确的,在动态过程中,比值关系相对不够精确。 当主动量处于不变状态时,从动量控制系统又相当于一个定值控制系统。

单闭环比值控制系统:能克服从动量的波动;能随主动量的变化而变化,使 FM 与 FS 保持比值关系。

2 、双闭环比值控制系统 在主动量也需要控制时,增加一个主动量闭环控制系统,单闭环比值控制系统成为双闭环比值控制系统,如图 9 - 14 所示。 增加了主动量闭环控制后,主动量得以稳定,从而使总流量能保持稳定。 双闭环比值控制系统主要用于总流量需要经常调整(即工艺负荷的升降)的场合,如无此要求,可采用两个单独的闭环控制系统来保持比值关系。

图 9 - 14 双闭环比值控制系统方框图

2 、双闭环比值控制系统 在主动量也需要控制时,增加一个主动量闭环控制系统,单闭环比值控制系统成为双闭环比值控制系统,如图 9 - 14 所示。 增加了主动量闭环控制后,主动量得以稳定,从而使总流量能保持稳定。 双闭环比值控制系统主要用于总流量需要经常调整(即工艺负荷的升降)的场合,如无此要求,可采用两个单独的闭环控制系统来保持比值关系。

3 、变比值控制系统 满足工艺对两种流量的比值可以依据其他条件变化的要求。如图 9 - 15 所示。 燃烧的实际状况可从加热炉的烟道气氧含量判断,根据氧含量分析值,通过主控制器,改变燃料与空气流量比值控制器的设定值,从而构成了变比值控制系统。 该系统也是氧含量-流量比值串级控制系统。

图 9 - 15 加热炉变比值控制系统

图 9 - 16 加热炉变比值控制系统方框图

三、比值系数计算 流量比值与设置于仪表的比值系数是两个不同的概念,它们都为无量纲系数,但两者的数值是不等的。 流量比值 k 是流量的比值,它们可以同为质量流量、体积流量或折算为标准情况下的流量。 比值系数 K 是设置于比值函数模块或比值控制器中的参数。

1 、采用线性流量检测单元的情况
在正常工况下,主动量与从动量的输出值(无量纲)分别为 F1/F1MAX , F2/F2MAX 。所以单元组合仪表的比值系数为:
该比值系数只与变送器的量程和所要求从动量与主动量的对应比例关系有关,与变送器的电气零点无关。
)()(/
/
2
1
2
1
1
2
11
22
MAX
MAX
MAX
MAX
MAX
MAX
F
Fk
F
F
F
F
FF
FFK
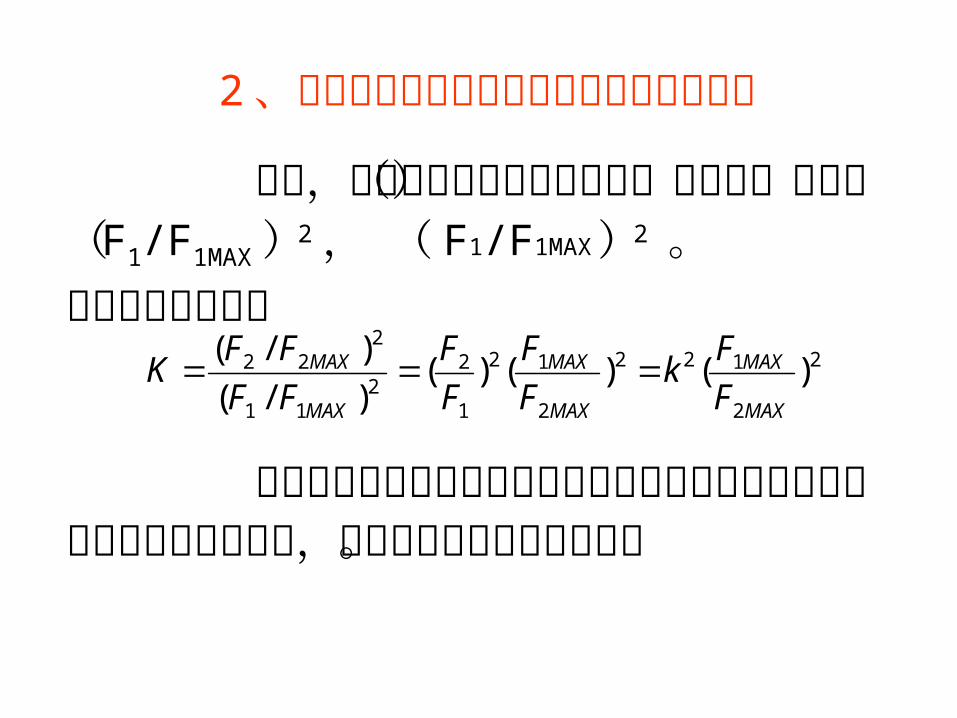
2 、采用差压法未经开方流量检测单元的情况
此时,主动量与从动量的输出值(无量纲)分别为( F1/F1MAX ) 2 , ( F1/F1MAX ) 2 。所以比值系数为:
该比值系数只与变送器的量程和所要求从动量与主动量的对应比例关系有关,与变送器的电气零点无关。
2
2
122
2
12
1
22
11
222 )()()(
)/(
)/(
MAX
MAX
MAX
MAX
MAX
MAX
F
Fk
F
F
F
F
FF
FFK

( 1 )采用线性流量检测方法时,只有在 F1MAX=F2MAX 的场合, k=K ;在采用差压法未经开方流量检测时,在 时, k=K( 2 )采用相乘或相除的方案中,比值函数部件可以改接在 F2 一侧,即实现 。此时, K’ = 1/K 。( 3 )在同样的比值 k 下,通过调整 F1MAX ,F2MAX 也可以改变比值系数。
3 、几点说明
22
21 MAXMAX FkF
MAXMAX FFFFK 1122' //