Embed Size (px)
Citation preview
1
研究成果報告
「歩行支援ロボット」サステナブル基盤グループ
山田 和範名古屋大学 未来社会創造機構 特任准教授

2
本日の6つのトピックス
インテレクチャルガラス
ゆっくり自動運転®
今日の栞アプリ(外出促進コンシェルジュサービス)
コミュニティ・サポート・システム(CSS)
歩行支援ロボット
ドライバエージェント

3
ビジョンを実現するアプリ
共助と自尊心が生まれる場と仕組
安心・安全に使える車と運転支援
お出かけしたくなるような身体と気持ち
歩行支援ロボット
高齢者が元気になるモビリティ社会
4
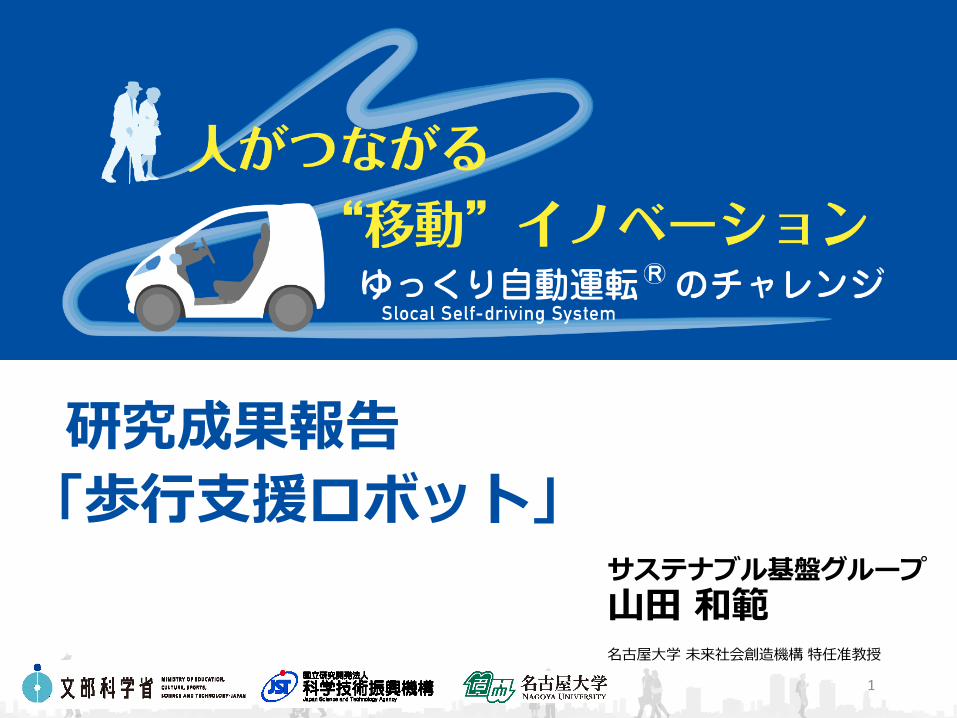
対象とする社会問題・提供する価値
高齢者が元気になるモビリティ社会安心・安全に使える車と運転支援
お出かけしたくなるような身体と気持ち
歩行支援ロボット
課題:運動機能が低下し、転倒に不安を持つ高齢者
は、外出に不安を覚えることで日常生活を思
うように送ることができない。
価値:歩行支援ロボットを用いた身体トレーニング
で、体力の衰えを回避、自信を持って活発な
日常生活を送ることができる。
共助と自尊心が生まれる場と仕組
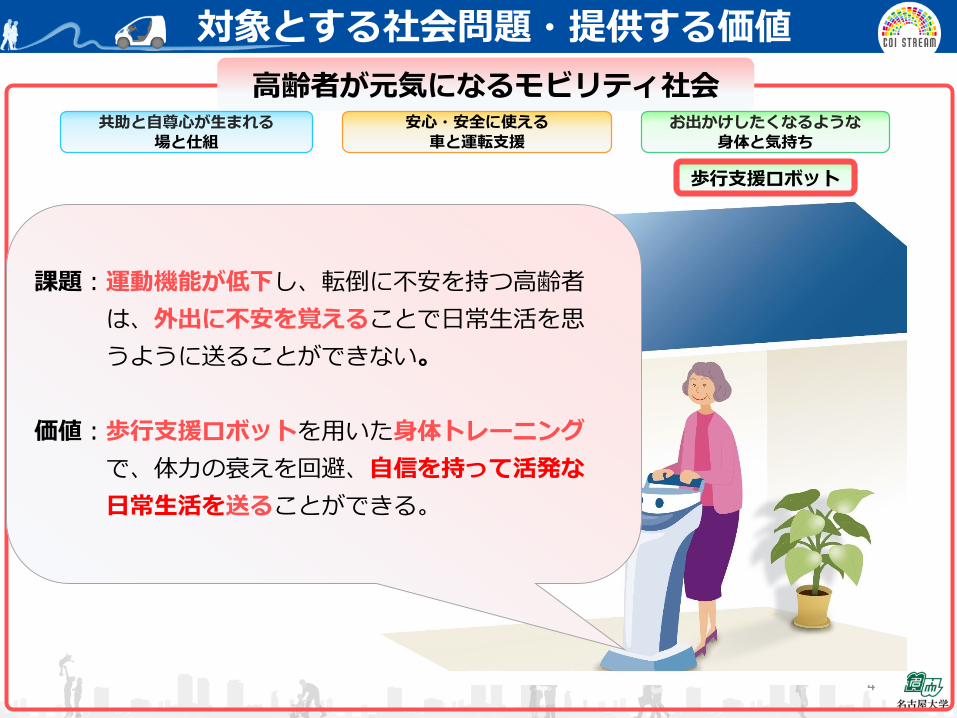
高齢者の外出頻度
※散歩含め
出典:内閣府「平成26年度高齢者の日常生活に関する意識調査」
32.5%
21.1%
外出が週に1日以下
課題
少しでも歩いて身体を動かして、自立した生活を維持して欲しい。
転倒や事故は本当に避けたい。
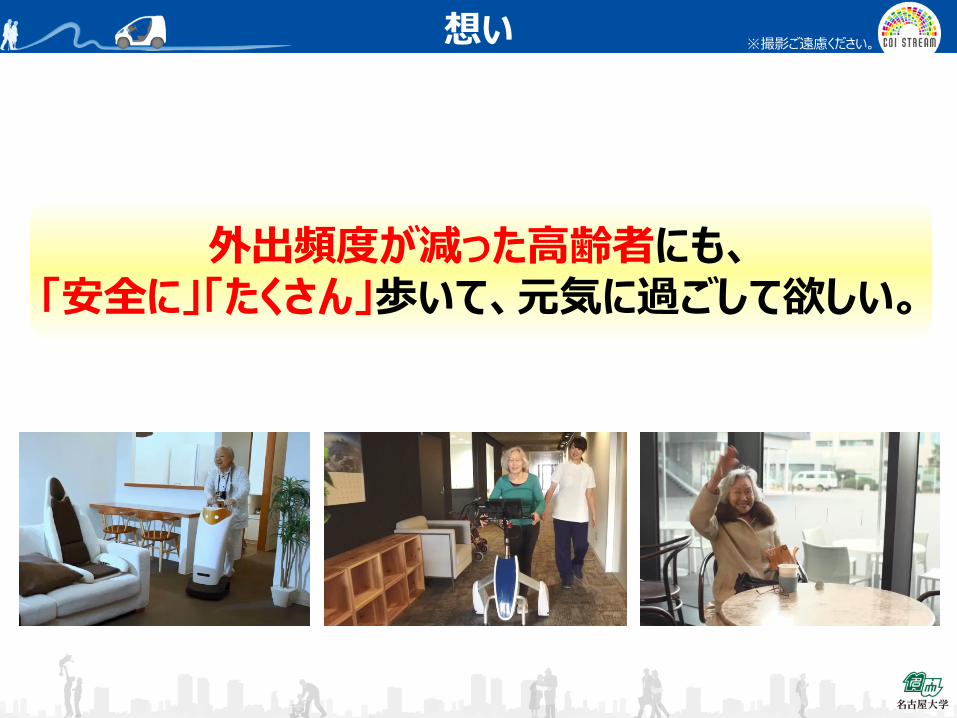
想い ※撮影ご遠慮ください。
外出頻度が減った高齢者にも、「安全に」「たくさん」歩いて、元気に過ごして欲しい。

8
概要
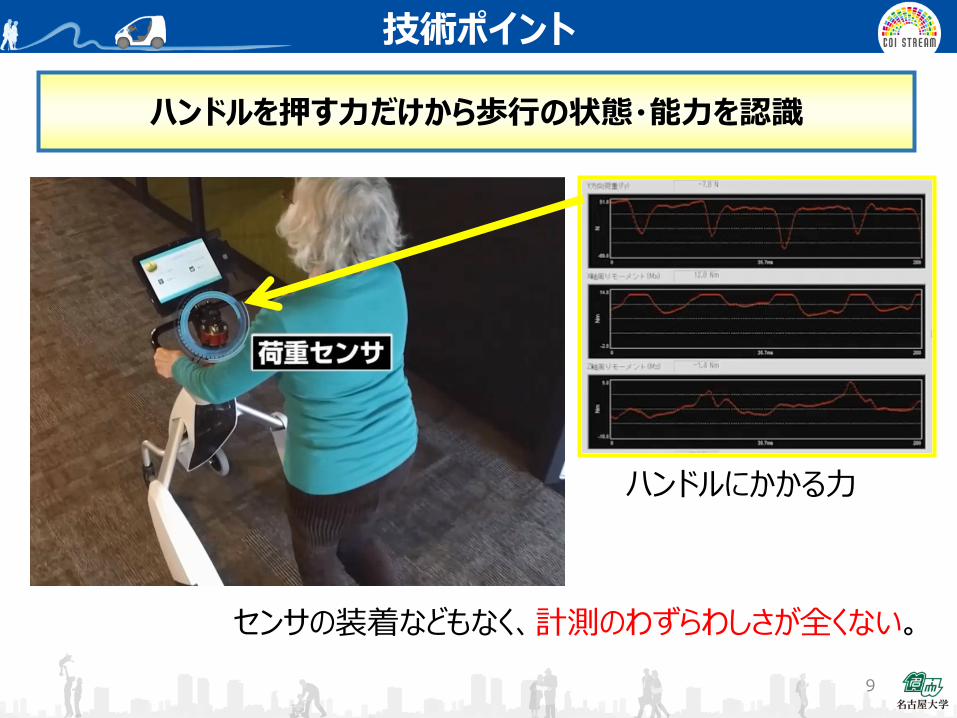
技術ポイント
ハンドルにかかる力
ハンドルを押す力だけから歩行の状態・能力を認識
センサの装着などもなく、計測のわずらわしさが全くない。
9
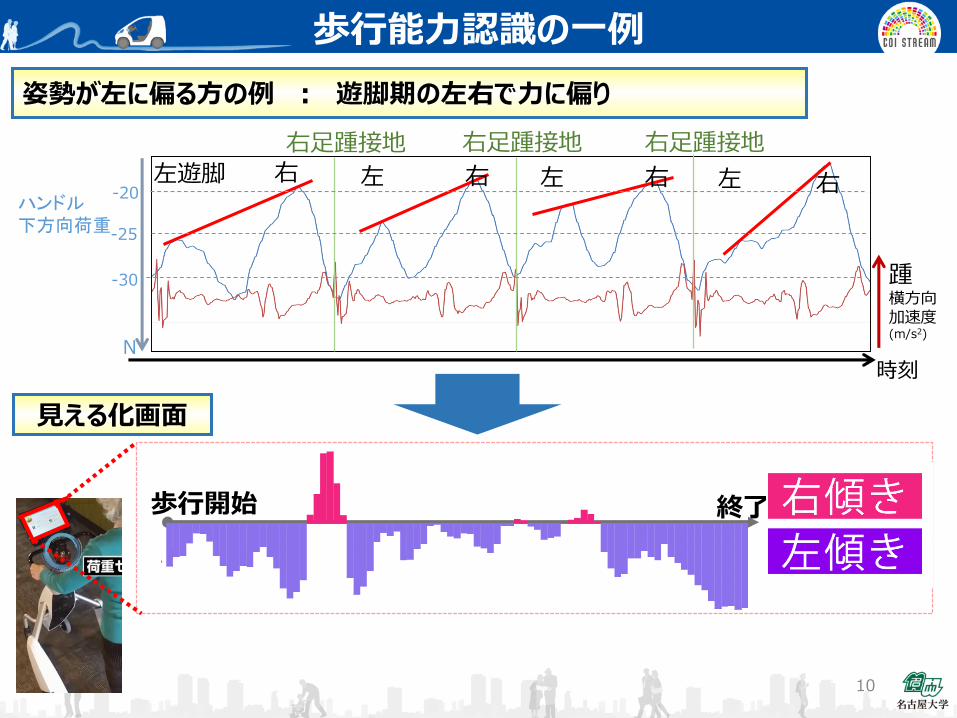
歩行能力認識の一例
時刻
踵横方向加速度(m/s2)
右足踵接地 右足踵接地 右足踵接地
-25
N
-20
-30
左遊脚 右 左 右 左 右 左 右
10
歩行開始 終了
姿勢が左に偏る方の例 : 遊脚期の左右で力に偏り
見える化画面
ハンドル下方向荷重
11
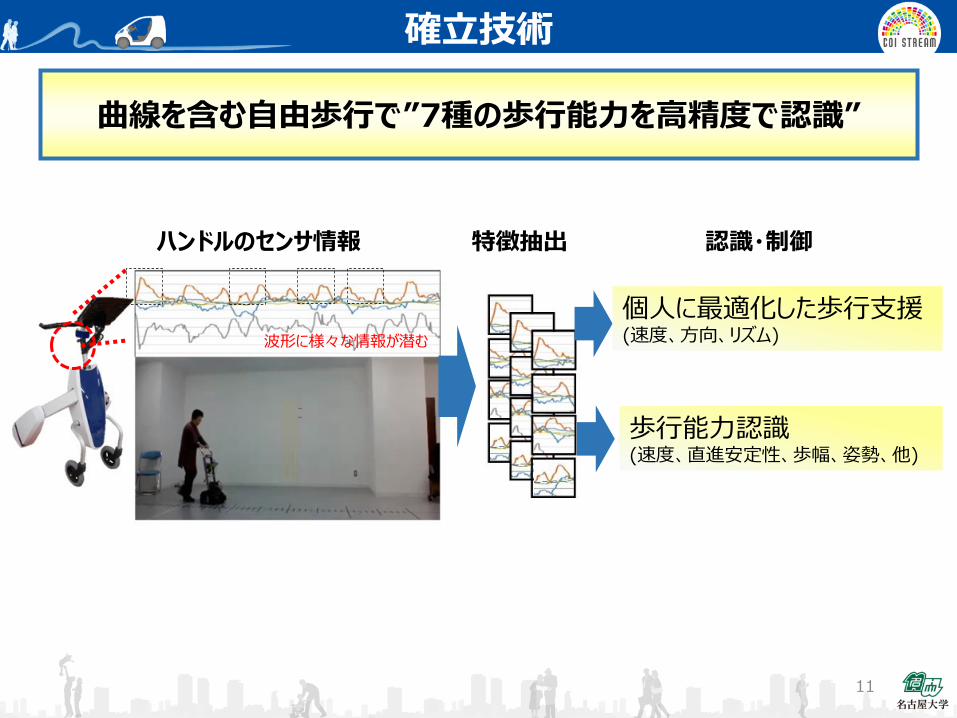
確立技術
ハンドルのセンサ情報 特徴抽出
波形に様々な情報が潜む
個人に最適化した歩行支援(速度、方向、リズム)
認識・制御
歩行能力認識(速度、直進安定性、歩幅、姿勢、他)
曲線を含む自由歩行で”7種の歩行能力を高精度で認識”
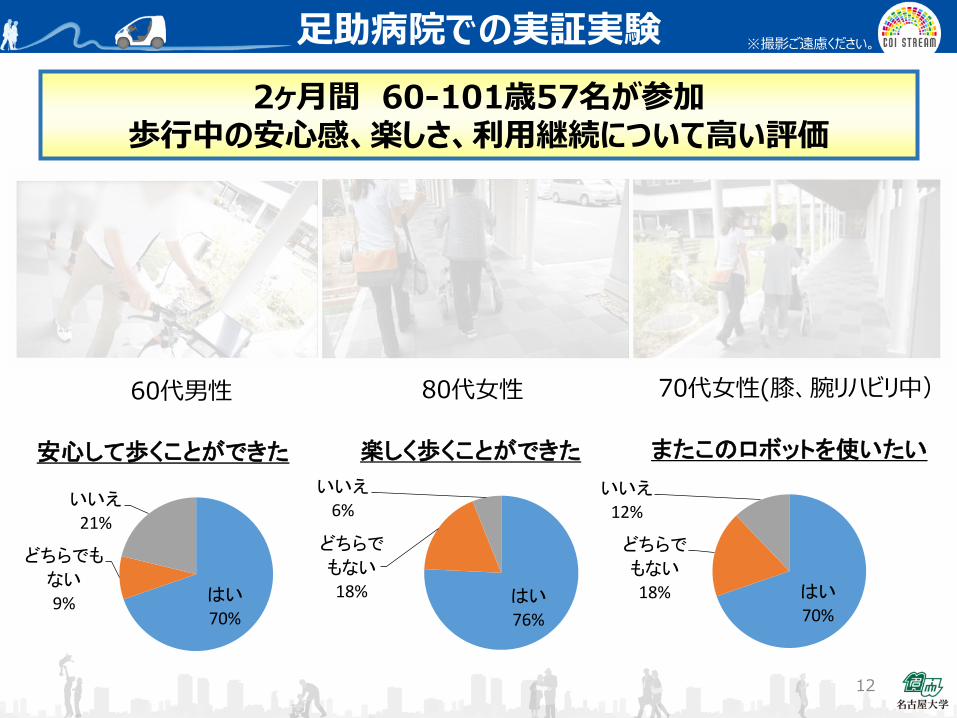
足助病院での実証実験
60代男性 70代女性(膝、腕リハビリ中)80代女性
※撮影ご遠慮ください。
はい76%
どちらで
もない18%
いいえ6%
楽しく歩くことができた
はい70%
どちらで
もない18%
いいえ12%
またこのロボットを使いたい
はい70%
どちらでも
ない9%
いいえ21%
安心して歩くことができた
12
2ヶ月間 60-101歳57名が参加歩行中の安心感、楽しさ、利用継続について高い評価
13
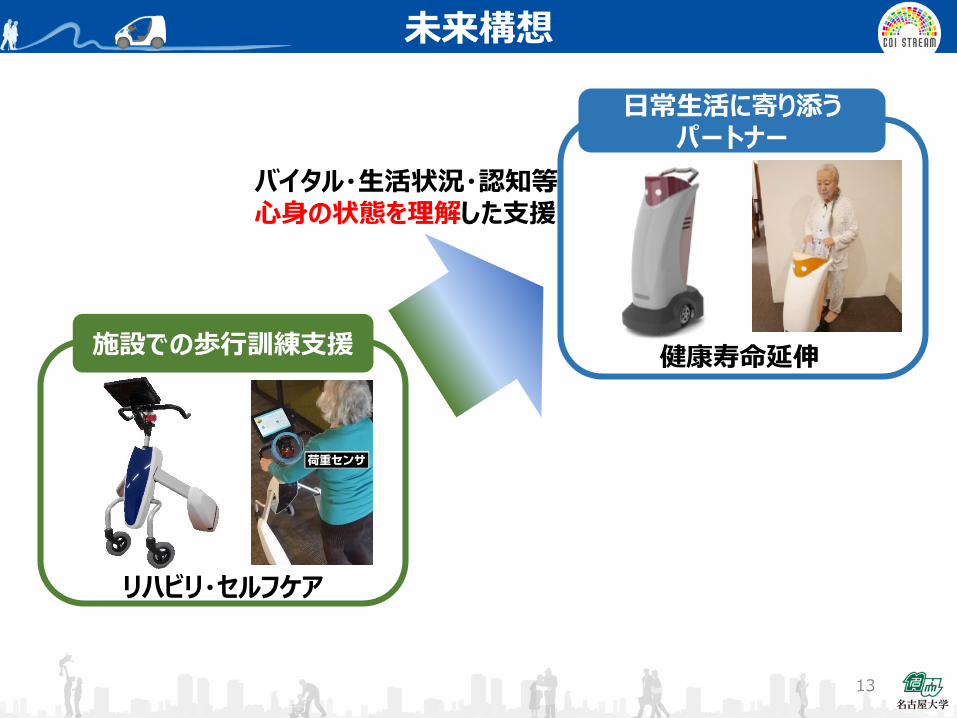
未来構想
リハビリ・セルフケア
健康寿命延伸
日常生活に寄り添うパートナー
施設での歩行訓練支援
バイタル・生活状況・認知等心身の状態を理解した支援

日常生活に寄り添う
[3]足助病院http://www.jaaikosei.or.jp/asuke/
[2]旭ぬくもりの里
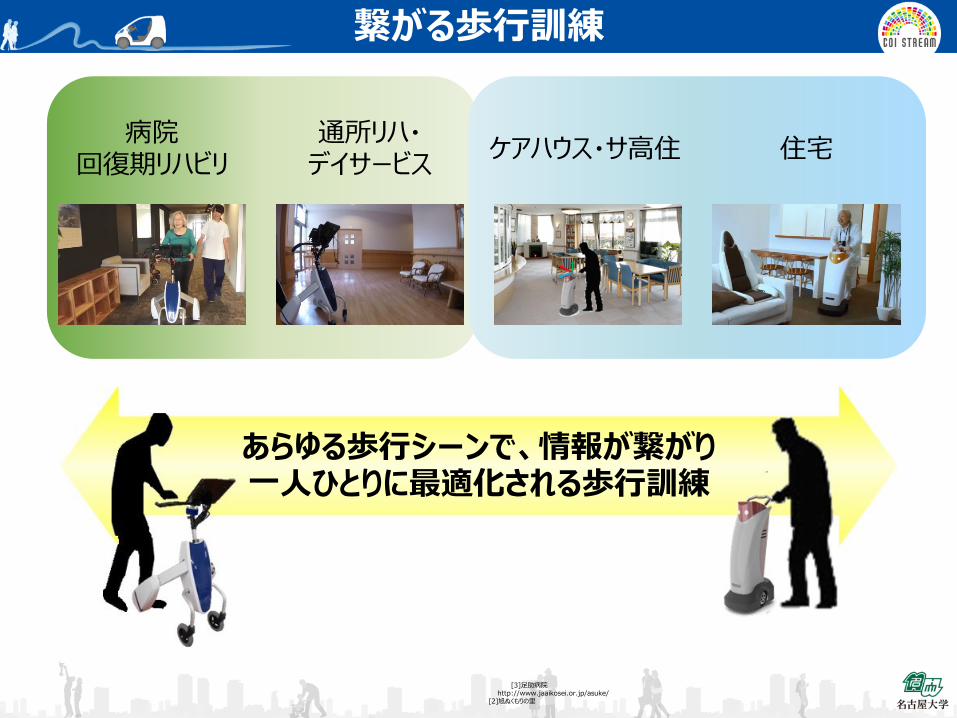
繋がる歩行訓練
通所リハ・デイサービス
病院回復期リハビリ
ケアハウス・サ高住 住宅
あらゆる歩行シーンで、情報が繋がり一人ひとりに最適化される歩行訓練

より多くの活き活きした時間を