Embed Size (px)
Citation preview
52
Síntesis de eslabonamientos 2013
MECANICA TECNICA II Dr.Ing.César Lanz
53
Síntesis y Análisis de Mecanismos
Síntesis de Eslabonamientos
Síntesis dimensional Es la determinación de las longitudes de los eslabones y el posicionamiento de los pivotes para efectuar los movimientos deseados. Los métodos gráficos son sencillos hasta tres posiciones en mecanismos de cuatro barras. En más de tres posiciones se utiliza el método analítico. Cuando se diseña un eslabonamiento, este se puede resolver como para dar un:
1.-Generador de Función.
2.-Generador de trayectoria.
3.-Generador de Movimiento.
54
1. Generador de Función: Es la obtención de una función de enlace entre la función de entrada y la función salida del mecanismo con un movimiento predeterminado. Lo que interesa acá es el movimiento relativo entre eslabones. Un generador de función es, conceptualmente, Una "Caja Negra" que suministra una Salida Predecible en respuesta a una entrada Conocida. Muchas de estas aplicaciones pueden efectuarse ahora más económica y eficientemente No Con Dispositivos Mecánicos sino con Dispositivos Electromecánicos. Además, el generador de función Electromecánico Controlado por Computadora es Programable, lo que permite una rápida modificación de la función generada según varían las demandas. No obstante, el Sistema Leva-Seguidor, es una forma de Generador De Función Mecánico, capaz de lograr más altos niveles de Fuerza y Potencia que los Sistemas Electromecánicos.
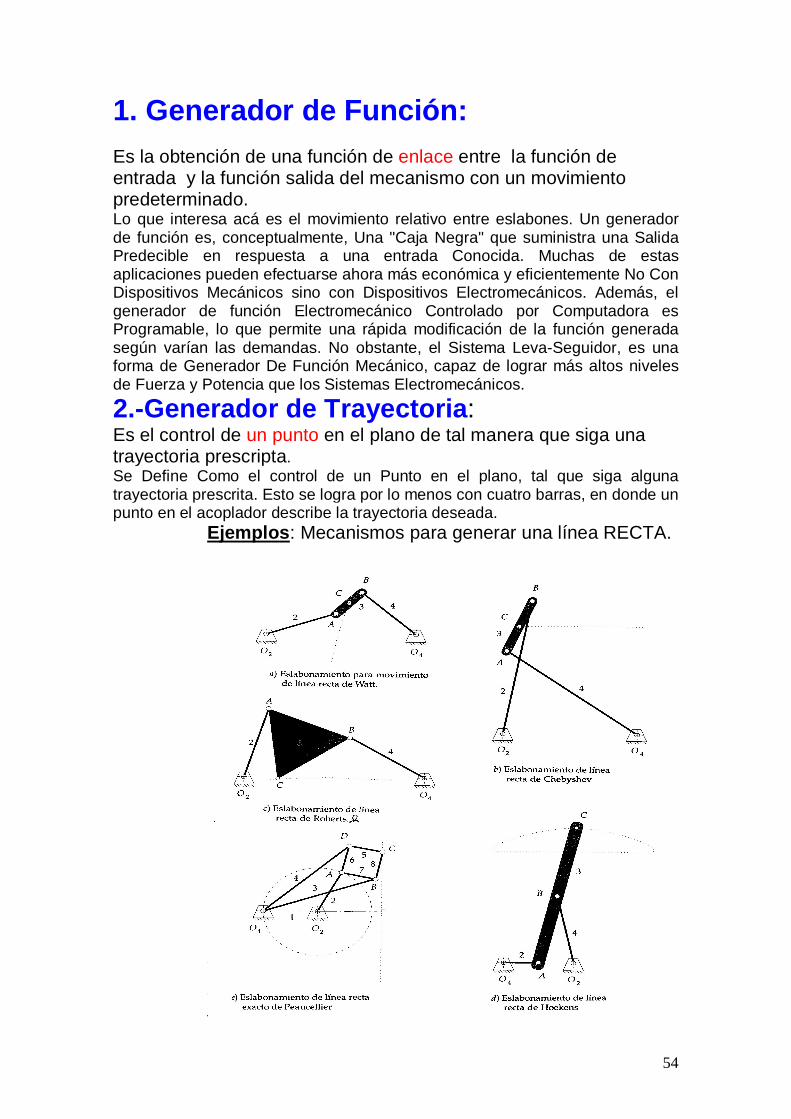
2.-Generador de Trayectoria: Es el control de un punto en el plano de tal manera que siga una trayectoria prescripta. Se Define Como el control de un Punto en el plano, tal que siga alguna trayectoria prescrita. Esto se logra por lo menos con cuatro barras, en donde un punto en el acoplador describe la trayectoria deseada.
Ejemplos: Mecanismos para generar una línea RECTA.

55
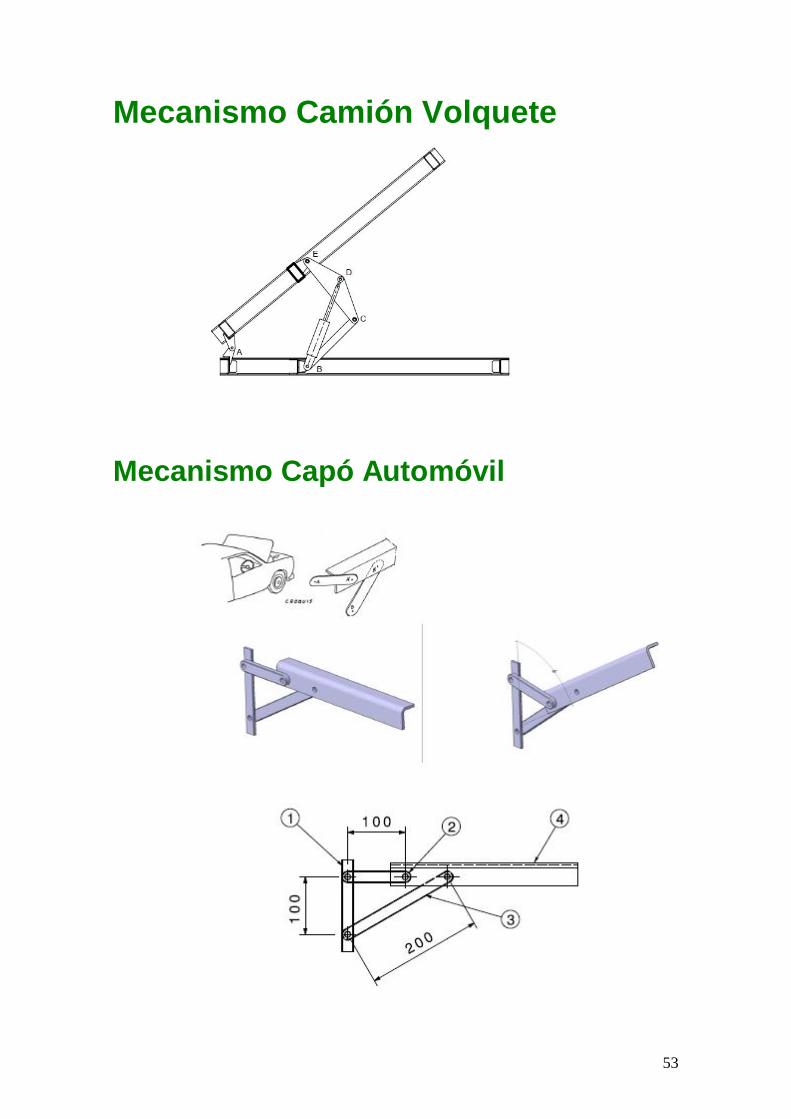
3.-Generación de Movimiento: Es el control de un eslabón en el plano de tal manera que asuma o cumpla con una serie de posiciones prescriptas secuénciales. Se define como el control de una línea en el plano, tal que supone algún conjunto prescrito de posiciones secuenciales. Aquí es importante la Orientación Del Eslabón que contiene la línea. Un Ejemplo de un problema de Generación De Movimiento es el control del Cucharón De Un Buldózer. El cucharón debe adoptar un conjunto de posiciones para excavar, recoger y vaciar la tierra de excavación. Conceptualmente, el movimiento de una línea pintada al lado del cucharón debe hacerse de modo que suponga las posiciones deseadas. La solución usual es un eslabonamiento. EJEMPLOS: Mecanismo Tren de aterrizaje avión
53
Mecanismo Camión Volquete
Mecanismo Capó Automóvil

54
SOLUCIONES GRAFICAS DE ESLABONAMIENTOS Recordar: Síntesis dimensional es la determinación de las longitudes de los eslabones y el posicionamiento de los pivotes para efectuar los movimientos deseados.
1.-Síntesis de función de dos posiciones de salida de balancín
55
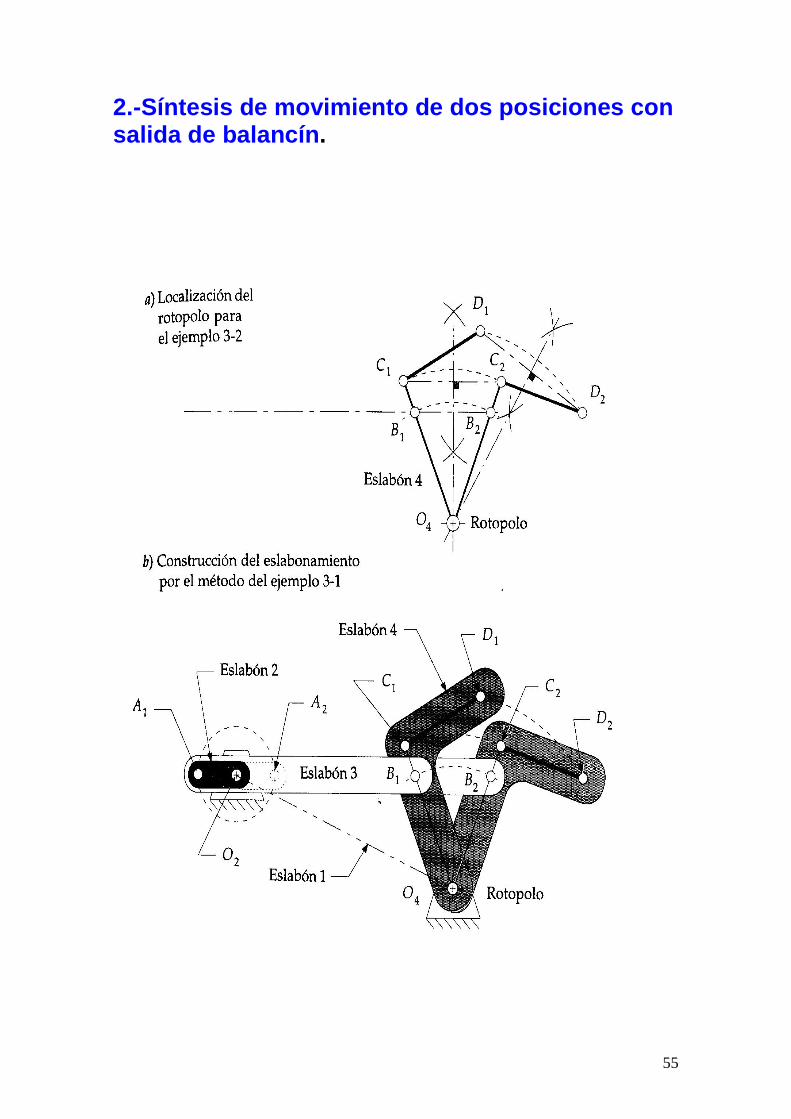
2.-Síntesis de movimiento de dos posiciones con salida de balancín.

56
3.-Síntesis de movimiento de dos posiciones con salida de acoplador. Acá Interesa POSICIONAR el ACOPLADOR (eslabón 3)
Ojo acá posiciono arbitrariamente a los pivotes O2 y O4 , como opción personal ,con la condición que siempre que estén ubicados en la direcciones normales (bisectrices) a C1 C2 y D1 D2.

57
4.-Síntesis de Dos posiciones con pivotes Móviles especificados. Los eslabones 5 y 6 son la díada impulsora, el resto se resuelve como el caso anterior.
58
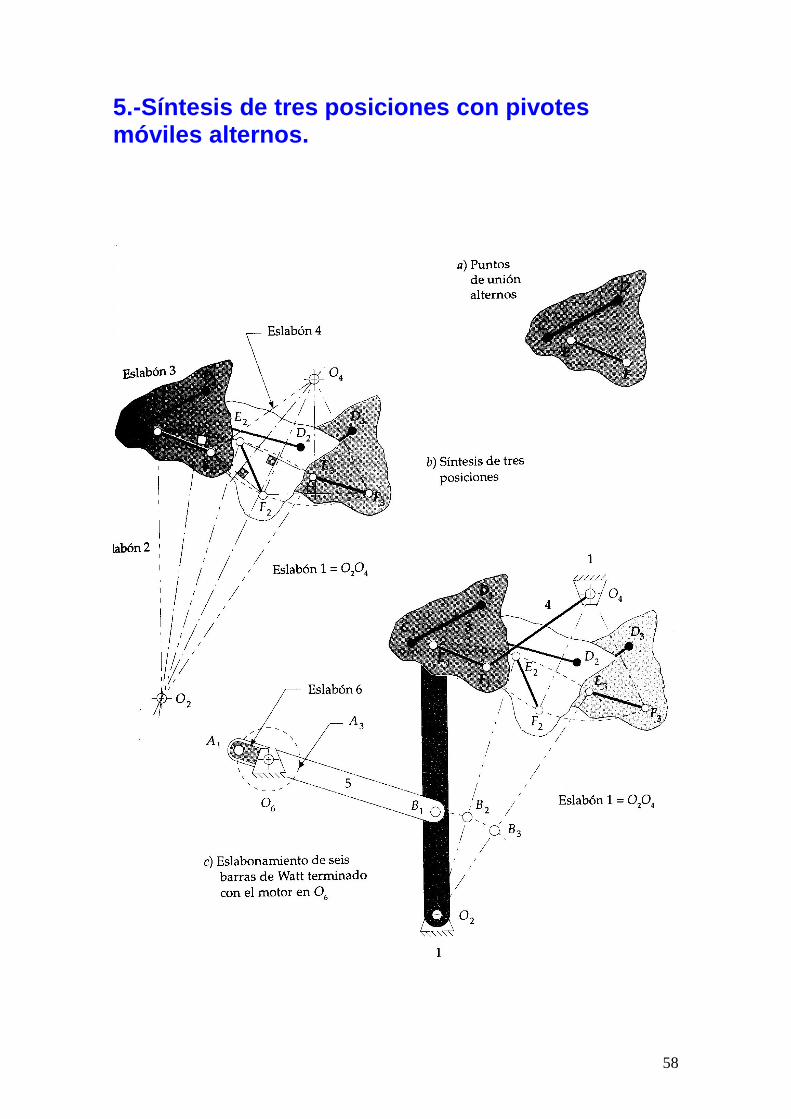
5.-Síntesis de tres posiciones con pivotes móviles alternos.

59
Mecanismos de Retorno Rápido (MRR) Mecanismos de retorno rápido de cuatro eslabones
Relación de retorno TR
Es el ángulo girado en el retorno y en la carrera útil
RT 360
180180 Funciona bien para relaciones menores a 1:1.5 (TR) Cuanto más debajo de la O4 esté O2, mas diferentes son los tiempos

60
Mecanismos de retorno rápido de seis eslabones.

61
Manivela-Corredera de retorno rápido Es aplicada a máquinas herramientas y tiene una carrera lenta de arranque de viruta y una carrera rápida de retroceso o retorno.
La limadora cuyo mecanismo de retorno rápido está construido por una corona (A), un piñón, una biela con corredera (B), un tornillo el cual al girarlo provoca el desplazamiento del dado (C) sobre este y el dado posee un perno el cual se desliza sobre la corredera de la biela. El extremo de la biela esta sujeto a un carro (E) el cual tendrá un movimiento longitudinal-

62
Curvas de Acoplador
Formas de curvas de acoplador.
63
Cognados Son eslabonamientos de distinta configuración que generan la misma curva de acoplador. Son mecanismos emparentados que se utilizan (u obtienen) cuando la solución de un mecanismo da: A.- Posiciones de pivotes fijos que se ubican en sitios incómodos o inconvenientes con respecto al bastidor. B.-La solución del mismo nos da como resultado un mecanismo de No Grashof cuando lo que se busca es uno de Grashof. Teorema de Roberts- Chebychev Dice que Tres eslabonamientos planos de cuatro barras articuladas describirán “ Identicas “ curvas de acoplador. Extensiones de Hartenberg y Denavit. 1.-Dos diferentes eslabonamientos planos de manivela – corredera, describirán idénticas curvas de acoplador. 2.-La curva de un punto de acoplador de un eslabonamiento plano de cuatro barras, también es descripta por la junta de una diada de “n” eslabonamiento de seis barras apropiado.

64
Obtención de Mecanismos Cognados Para crear mecanismo cognados se utilizan como ayuda el diagrama de Cayley y el diagrama de Roberts. DIAGRAMA DE CAYLEY
Diagrama de CAYLEY

65
DIAGRAMA DE ROBERTS
Nota: el punto P no puede pertenecer al segmento AB