Embed Size (px)
Citation preview
Informa ná sie vozidla
DIPLOMOVÁ PRÁCA
ANDREJ KA OVSKÝ
ILINSKÁ UNIVERZITA V ILINEElektrotechnická fakultaKatedra telekomunikácií
tudijný odbor: TELEKOMUNIKÁCIE
Vedúci diplomovej práce: doc. Ing. Martin Vaculík, PhD
Stupe kvalifikácie: in inier (Ing.)Dátum odovzdania diplomovej práce: 19.5.2006
ILINA 2006

Abstrakt
Diplomová práca sa zaoberá rie ením informa nej siete motorového vozidla a jej
aplikácií pre komunikáciu inteligentných senzorov s centrálnym palubným po íta om za
elom monitorovania stavu nákladu, vozidla a posádky. V úvodnej asti analyzuje
v sú asnosti najpou ívanej ie automobilové zbernice. alej sa venuje výberu
najvhodnej ej zbernice pre prepojenie senzorov. Problematike senzorov, ich vlastnos ami
a truktúrou inteligentných senzorov je venovaná samostatná kapitola. Nasleduje návrh
a rie enie senzorových jednotiek, centrálneho napájacieho zdroja senzorovej siete
a identifikácie a kontroly posádky. V závere je rozobratá problematika návrhu protokolu
aplika nej vrstvy a návrhu firmvéru pre senzorové jednotky. Konkrétne rie enia
obvodového zapojenia senzorových jednotiek ako aj vývojové diagramy firmvéru sú
uvedené v prílohovej asti.
Abstract
Diploma theses deals with the road vehicles information networks and application
of communication between the smart sensors and a central on-board computer in purpose
of monitoring the condition of load, vehicle and a crew. The recital of the theses analyses
the most frequent automotive buses in present. It also deals with the choice of the most
suitable buses for sensors connection. There is a special chapter which is aimed to the
question of sensors, especially of characteristics and the structure of smart sensors. The
following chapter includes the pre-design as well as the solution of sensors units, central
power supply unit of sensors networks and the identification and the control of the crew.
The conclusion contains the question of the protocol pre-design of the application layer
and the firmware pre-design for sensors units. There are concrete solutions of the sensors
units circuit schemes as well as the firmwares developed diagram in the appendix.
ilinská univerzita v iline, Elektrotechnická fakulta,
Katedra telekomunikácií________________________________________________________________________
ANOTA NÝ ZÁZNAM - DIPLOMOVÁ PRÁCA
Priezvisko, meno: Ka ovský Andrej kolský rok: 2005/2006
Názov práce: Informa ná sie vozidla
Po et strán: 64 Po et obrázkov: 41 Po et tabuliek:
15
Po et grafov: 0 Po et príloh: 7 Pou itá lit.: 37
Anotácia v slovenskom jazyku: Diplomová práca rie i problematiku návrhu senzorovej
komunika nej siete cestných vozidiel. Zaoberá sa analýzou pou ívaných automobilových
zberníc, vlastnos ami senzorov, ich parametrami a mo nos ami pripojenia k navrhnutej
komunika nej sieti. Jadrom práce je rie enie obvodového zapojenia senzorových
jednotiek, spôsob ich komunikácie s centrálnym palubním po íta om a návrh rie enia
protokolu aplika nej vrstvy senzorovej siete.
Anotácia v anglickom jazyku: Diploma theses solves the questions about the project of
road vehicles sensor-based communication networks. It deals with analysis of using
automotive communication buses, characters of sensors, sensors properties and
connection methods of designing the communication networks. The theses is aimed on
solving the circuit connection methods of sensors units, possibilities of communication
between the sensor-based units and the central on-board computer and predesign of
sensor-based networks application layer protocol.
ové slová: Zbernica, CAN, senzor, cestné vozidlá, preprava nebezpe ných vecí,
Vedúci práce: doc. Ing. Martin Vaculík, PhD
Recenzent práce: Dr. Ing. Peter Vestenický
Dátum odovzdania práce: 19. 5. 2006

Obsah
1. Úvod ..................................................................................................................... 1
2. Analýza zbernicového systému motorového vozidla a výber vhodnej
komunika nej zbernice na pripojenie senzoro .................................................... 3
2.1. Triedenie automobilových zberníc ................................................................... 3
2.2. Preh ad a popis automobilových zberníc.......................................................... 4
2.2.1. Zbernica MOST .................................................................................... 4
2.2.2. Zbernica OBD2 ..................................................................................... 5
2.2.3. Zbernica SAE J1850.............................................................................. 6
2.2.4. Zbernica IE Bus .................................................................................... 7
2.2.5. Zbernica LIN......................................................................................... 9
2.2.6. Zbernica MI ........................................................................................ 11
2.2.7. Zbernica BYTEFLIGHT ..................................................................... 13
2.2.8. Zbernica CAN-BUS ............................................................................ 19
2.3. Porovnanie základných vlastností automobilových zberníc ............................ 23
2.4. Výber vhodnej senzorovej zbernice................................................................ 23
3. Senzory ................................................................................................................ 25
3.1. Definícia senzora ........................................................................................... 25
3.2. Základné rozdelenie senzorov........................................................................ 25
3.3. Merací re azec............................................................................................... 26
3.4. Inteligencia senzorov ..................................................................................... 27
3.4.1. Inteligentný senzor .............................................................................. 27
3.4.2. Rozdelenie senzorov pod a inteligencie............................................... 29
3.5. Automatizované spracovávanie dát v senzorovej technike.............................. 30
3.6. Technické parametre senzorov....................................................................... 31
3.7. Preh ad a rozdelenie senzorov vhodných na pou itie v cestných vozidlách .... 32
3.7.1. Senzory monitorujúce stav vozidla ...................................................... 33
3.7.2. Senzory monitorujúce náklad .............................................................. 34
3.7.3. Senzory pre identifikáciu a kontrolu stavu posádky ............................. 35
4. Definovanie rozhrania medzi senzorom a zbernicou......................................... 39
4.1. Inteligentný senzorový modul........................................................................ 39
4.2. Návrh inteligentného senzorového modulu pre zbernicu CAN Bus ................ 39
5. Výber predspracujúceho procesora, CAN transceivera a detailný návrh
obvodov senzora.................................................................................................. 42
5.1. Kritériá výberu .............................................................................................. 42
5.2. Výber procesora pre inteligentný senzorový modul........................................ 42
5.3. Výber CAN transceivera................................................................................ 44
5.4. Detailný návrh obvodov senzora .................................................................... 45
5.5. Popis rie enia senzorovej jednotky................................................................. 47
5.6. Návrh centrálneho napájacieho zdroja senzorových jednotiek ........................ 48
5.6.1. Rie enie centrálneho napájacieho zdroja.............................................. 48
5.7. Výber káblov, konktorov a ich zapojenie ....................................................... 50
6. Návrh truktúry komunika nej vety ................................................................. 52
6.1. CANopen ...................................................................................................... 52
6.1.1. Identifikátory protokolu CANopen ...................................................... 53
6.1.2. Identifikátor zariadenia........................................................................ 56
6.1.3. Objekty sie ových slu ieb (NMT Objects) .......................................... 56
6.1.4. Objekt zabezpe enia prevádzky (Node/Life Guarding Object)............. 58
6.1.5. Objekt synchronizácie (SYNC Object) ................................................ 58
6.1.6. Objekt asová zna ka (Time Stamp Object)......................................... 59
6.1.7. Núdzový objekt (Emergency Object)................................................... 59
6.1.8. Objekty PDO....................................................................................... 60
6.1.9. Objekty SDO....................................................................................... 60
6.2. Návrh protokolu aplika nej vrstvy senzorovej siete........................................ 61
6.3. Programové vybavenie procesora senzorovej jednotky................................... 62
6.3.1. obecná truktúra firmvéru ............................................................... 62
6.3.2. Inicializácia ......................................................................................... 62
6.3.3. Automatický test funk nosti ................................................................ 63
7. Záver ................................................................................................................... 64
Zoznam pou itej literatúry ...................................................................................... 65
Zoznam obrázkov
Obrázok 2.1: Prepojenie zariadení MOST zbernicou .................................................... 4
Obrázok 2.2: Dátový rámec protokolu SAE J1850........................................................ 7
Obrázok 2.3: Elektrické prepojenie zbernice IE Bus ..................................................... 8
Obrázok 2.4: Transportný rámec protokolu zbernice IE Bus ......................................... 8
Obrázok 2.5: Rámec Master zbernice LIN .................................................................. 10
Obrázok 2.6: Rámec Slave zbernice LIN .................................................................... 10
Obrázok 2.7: Bloková schéma zbernice MI................................................................. 11
Obrázok 2.8: Rámec push riadiacej jednotky .............................................................. 11
Obrázok 2.9: Rámec pull podriadeného zariadenia ..................................................... 11
Obrázok 2.10: Pripojenie mikroprocesora na zbernicu MI .......................................... 12
Obrázok 2.11: Flexibilný asovo delený viacnásobný prístup (FTDMA) .................... 15
Obrázok 2.12: Po ítadlá synchronizovaných slotov .................................................... 16
Obrázok 2.13: Synchrónny a asynchrónny prenos....................................................... 17
Obrázok 2.14: Formát správy zbernice Byteflight ....................................................... 18
Obrázok 2.15: Komunikácia na zbernici CAN ............................................................ 20
Obrázok 2.16: Bloková schéma ECAN modulu .......................................................... 22
Obrázok 3.1: Bloková schéma meracieho re azca so senzorom................................... 26
Obrázok 3.2: Inteligentný senzor ................................................................................ 27
Obrázok 3.3: Logická truktúra inteligencie senzora pod a integrovaných funk ných
blokov ........................................................................................................................ 29
Obrázok 3.4: Centralizovaný systém pripojenia senzorov a merací re azec................. 30
Obrázok 3.5: Decentralizovaná truktúra s distribuovanou inteligenciou..................... 30
Obrázok 3.6: Základné funkcie realizované pou itím senzorov pôvodnej senzorovej
siete............................................................................................................................ 33
Obrázok 3.7: Senzor tlaku a teploty pneumatík SMD 400........................................... 34
Obrázok 3.8: PRETEC i-Disk Touch .......................................................................... 36
Obrázok 3.9: APC Biometric Password Manager........................................................ 37
Obrázok 3.10: Prístroj na meranie srdcového tepu Garmin Forerunner 301................. 38
Obrázok 3.11: Prenos údajov medzi Forerunner 301 a PC .......................................... 39
Obrázok 4.1: Inteligentný senzorový modul zbernice CAN Bus.................................. 40
Obrázok 4.2: Bloková schéma senzorovej jednotky .................................................... 41
Obrázok 5.1: Bloková schéma senzorovej jednotky s procesorom PIC18F2580 .......... 46
Obrázok 5.2: Spôsob automatickej detekcie po kodenia senzora................................. 47
Obrázok 5.3: Bloková schéma centrálneho napájacieho zdroja ................................... 50
Obrázok 5.4: Kabelá zbernice CAN .......................................................................... 51
Obrázok 6.1: Identifikátor komunika ných objektov protokolu CANopen .................. 56
Obrázok 6.2: Riadiaci objekt sie ových slu ieb .......................................................... 56
Obrázok 6.3: Objekt zabezpe enia prevádzky............................................................. 58
Obrázok 6.4: Formát asovej zna ky .......................................................................... 59
Obrázok 6.5: Formát objektu Emergency.................................................................... 59
Obrázok 6.6: Formát objektu PDO ............................................................................. 60
Obrázok 6.7: Formát prvého segmentu objektu SDO .................................................. 60
Obrázok 6.8: Formát druhého a al ích segmentov objektu SDO ............................... 60
Zoznam tabuliek
Tabu ka 2.1: Transportný rámec protokolu IE Bus ....................................................... 9
Tabu ka 2.2: Rámec Master zbernice LIN .................................................................. 10
Tabu ka 2.3: Rámec Slave zbernice LIN .................................................................... 10
Tabu ka 2.4: Polia rámca Push ................................................................................... 12
Tabu ka 2.5: Polia rámca Pull .................................................................................... 12
Tabu ka 2.6: Porovnanie zberníc CAN-Bus a Byteflight............................................. 18
Tabu ka 2.7: Porovnanie automobilových zberníc ...................................................... 23
Tabu ka 5.1: Charakteristické parametre procesora PIC18F2580................................ 43
Tabu ka 5.2: Porovnanie po iadaviek normy ISO 11898 s parametrami MCP2551 .... 45
Tabu ka 6.1: Zoznam povinných objektov s identifikátormi protokolu CANopen....... 54
Tabu ka 6.2: Slovník objektov ................................................................................... 55
Tabu ka 6.3: pecifikátor príkazu riadiacich slu ieb NMT ......................................... 57
Tabu ka 6.4: Stav zariadenia ...................................................................................... 58
Tabu ka 6.5: Bitová mapa chybového hlásenia z chybového registra (0x1001)........... 59
Tabu ka 6.6: Objekty komunika ného protokolu senzorovej siete .............................. 61
Zoznam pou itých skratiek
Skratky Anglický význam Slovenský význam
ADR European Agreement concerning
the International Carriage of
Dangerous Goods by Road
Európska dohoda o medzinárodnej
cestnej preprave nebezpe ných
vecí
A/D Analog to Digital converter Analógovo digitálny prevodník
CAN Bus Controller Area Network –
Bitserielle Universelle
Schnittstelle
Sériový komunika ný protokol pre
automobilové zbernice vyvinutý
firmou Robert Bosch
CD Compact Disk Kompaktný disk
CiA CAN in Automation Organizácia pre podporu
a tandardizáciu zbernice CAN v
automatizácií
COB-ID Communication Object ID Identifikátor komunika ného
objektu protokolu CANopen
CPU Central Processor Unit Centrálna procesorová jenotka
CRC, CRCH Cyclic Redundancy Check Cyklický redundantný sú et
CSMA/CD Carrier Sense Multiple Access
with Collision Detection
Viacnásobný náhodný prístup na
prenosové médium s kolíznou
detekciou
CSMA/CR Carrier Sense Multiple Access
with Collision Resolution
Viacnásobný náhodný prístup na
prenosové médium s rozlí ením
kolízií
DVD Digital Video Disk Disk digitálneho videa
ECAN Enhanced Controller Area
Network
Roz írenie protokolu zbernice
CAN
EDS Electronic Data Sheet pecilny súbor elektronických dát
protokolu CANopen
EEPROM Electric Erasable Programmable
Read-Only Memory
Elektricky zmazate ná
programovate ná pamä typu „iba
na ítanie“

EO Electronic circuit Elektronický obvod
EOF End of Frame Koniec rámca
FIFO First In First Out Pamät typu posuvný register
FTDMA Flexibile Time Division Multiple
Access
Flexibilný asovo delený
viacnásobný prístup na prenosové
médium
GPS Global Position System Globálny lokaliza ný systém
GSM Global System for Mobile
communication
Globálny systém mobilnej
komunkácie
HIQ High Intelligency Sensor Senzor s vysokou inteligenciou
HLP Higher Layer Protocol Protokol vy ích vrstiev
I2C Inter-Integrated Circuit Zbernica pre komunikáciu
integrovaných obvodov
ICD In Circuit Debug Technika programovania a ladenia
aplikácie procesora pomocou
dvoch pinov
ID Identifier Identifikátor
IE Bus Inter Equipment Bus Zbernica pre prepojenie zariadení
ISM Intelligent Sensor Module Inteligentný senzorový modul
ISO International Standards
Organization
Organizácia pre medzinárodnú
tandardizáciu
LIN Local Interconnect Network Lokálna prepojovacia sie
LIQ Low Intelligency Sensor Senzor s nízkou inteligenciou
MI Motorola Interconnect Automobilová zbernica vyvinutá
firmou Motorola
MOST Media Oriented Systems Transport Mulimediálna automobilová
zbernica
MP Mikroprocessor Mikroprocesor
MX Multiplexor Multiplexor
NIQ Non Intelligency Sensor Senzor bez inteligencie
NMT Network Managment Sie ový mana ment
NRZ Non Return to Zero Bez návratu k nule
OBD2 On-Board Diagnostics 2 Palubná diagnostika verzia 2
PDO Process Data Objects Objekt procesných dát
PWM Pulse Width Modulation Impulzná írková modulácia
R Interface Rozhranie
RAM Random Access Memory Pamä s náhodným prístupom
SAE Society of Automotive Engineers Spolo nos automobilových
in inierov
SDO Service Data Objects Objekt servisných dát
SOF Start of Frame Za iatok rámca
SPI Serial Peripheral Interface Sériové rozhranie pre
komunikáciu vonkaj ích zariadení
STP Shielded Twisted Pair Tienený krútený pár vodi ov
U Unification Unifikácia
UART Universal Asynchronous Reciever
Transmitter
tandard pre asynchrónny prenos
dát
USB Universal Serial Bus Univerzálna sériová zbernica
U.S. EPA United States Environmental
Protection Agency
Americká agentúra pre kontrolu
emisií motorových vozidiel
UTP Unshielded Twisted Pair Netienený krútený pár vodi ov
VPW Variabile Pulse Width Variabilná írka impulzov
XML Extensible Markup Language Pred ite ný jazyk so zna kami

ilinská univerzita v iline Diplomová prácaKatedra telekomunikácií––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––
________________________________________________________________________
1
1 Úvod
Po iadavky na odolnos elektroniky v automobile sa dajú prirovna
k najnáro nej ím po iadavkám na elektroniku do zbra ových systémov (napr. teplotné
po iadavky na spo ahlivú funkciu elektronických systémov v automobiloch sú od -40°C
125°C). Na základe po iadaviek na odolnos a spo ahlivos je riadiaca elektronika
v automobile rie ená vo vä ine prípadov ako decentralizovaná architektúra, teda
nieko ko riadiacich jednotiek poprepájaných zbernicou. Po vyradení jedného uzla,
modulu alebo komunika nej vetvy tak nemusí dôjs k znefunk neniu celého systému.
Ka dý elektronický systém v automobile má svoju vlastnú riadiacu jednotku a taktie aj
senzory, sníma e a ak né leny. Decentralizácia na jednej strane zvy uje spo ahlivos
systému, no na druhej strane pochody kontrolované a ovládané jednotlivými riadiacimi
jednotkami musia by vzájomne synchronizované. Samozrejme je mo né riadiace
jednotky poprepája samostatnými vedeniami, ale tým sa stráca preh adnos
a jednoduchos , pri om obidve tieto vlastnosti sú k om k spo ahlivosti
a k jednoduchému servisu. Pre výmenu údajov medzi jednotlivými riadiacimi jednotkami
sa preto pou íva jednoduchý systém zberníc, aby elektronická a elektrická as vozidla
zostala preh adná, spo ahlivá a nenáro ná na údr bu. V sú asnosti sa vo vozidlách
pou íva viacero tandardou zberníc, ktoré sa vzájomne lí ia nie len topológiou,
prenosovým médiom a fyzickou vrstvou ale hlavne protokolmi vy ích vrstiev, z oho
vyplýva ich vzájomná nekompatibilita a vzájomná nezamenite nos modulov. Tento stav
nastal v dôsledku toho, e viacero ve kých svetových výrobcov automobilov sa sna ilo
vyvinú vlastný zbernicový systém pre svoje vozidlá. I ke s postupom asu a v dôsledku
fúzie viacerých automobiliek do jedného koncernu (napr. Buggati, Audi, Seat patria
koncernu Wolkswagen) sa po et pou ívaných zbernicových systémov vykry talizoval do
nieko kých tandardov, stále sa objavujú nové, ktoré sú vyvíjané za ú elom zvý enia
spo ahlivosti, prenosovej rýchlosti a vo vä ine prípadov ponúkajú aj nové mo nosti.
Preto sa v moderných vozidlách v sú asnosti za íname stretáva s multimediálnymi
zbernicami, ktorých úlohou je prepoji multimediálne zariadenia ( prehráva e DVD, CD,
rádio prijíma , palubný po íta , pozi né zariadenie GPS, bezdrôtový telefón a pod.)
a zvý tak komfort posádky.

ilinská univerzita v iline Diplomová prácaKatedra telekomunikácií––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––
________________________________________________________________________
2
Medzi pi ku v oblasti multimediálnych zberníc pre automobily patrí zbernica MOST
(Media Oriented Systems Transport) vyvinutá firmou MOST Cooperation z Nemecka.
Takýto typ zberníc nájde uplatnenie najmä v luxusných osobných automobiloch, av ak
pre ú el prepojenia senzorov je nepou ite ná.
Iným typom novo vyvinutých zberníc je zbernica FlexRay , ktorú v júni 2004 predstavilo
FlexRay Consortium, ktorého lenmi sú automobilky BMW, DaimlerChrysler, General
Motors, Wolkswagen a pi kové firmy z oblasti elektrotechniky a automatizácie ako
Robert Bosch, Philips, Freescale Halbleiter. Medzi hlavné rty zbernice FlexRay patrí jej
vysoká prenosová rýchlos (a 10 Mb/s) a schopnos pracova v synchrónnom aj
asynchrónnom re ime. Zbernicový systém FlexRay sa v sú asnosti pou íva
v automobiloch BMW rady 7.
alej nesmieme zabúda na priemyselné zbernice, ktoré nie sú implicitne ur ené
pre pou itie v cestných vozidlách, ale ich vlastnosti toto pou itie vôbec
nevylu ujú.(Industrial Ethernet, ProfiBus a pod.)
Dne ný trend v oblasti automobilovej elektroniky a elektrotechniky je nárast
elektronických systémov, nárast stup a decentralizácie a tie nárast potreby vzájomnej
komunikácie elektronických systémov vo vozidle. Tým sa za ínajú objavova problémy
s prudkým nárastom vodi ov a káblov, nárast variácií káblových zväzkov pod a stup a
výbavy vozidla a tie vysoká cena v prípade modifikácie týchto zväzkov.
Pri rie ení týchto problémov sa za alo vá ne uva ova o pou ití bezdrôtových technológií
v zbernicových systémoch vozidiel a za ali sa skúma mo nosti pou itia u jestvujúcich
bezdrôtových tandardov pre automobily. V tejto oblasti sa do popredia záujmu
svetových automobiliek dostáva technológia Bluetooth a to nie len ako náhrada za
metalické i optické zbernice cez ktoré spolu komunikujú elektronické moduly v rámci
vozidla, ale otvára aj nové mo nosti komunikácie medzi vozidlami navzájom. Tieto
trendy smerujú ku zvý eniu bezpe nosti na cestách, preto e vozidlo sa stáva nosite om
informácií, ktoré je schopné v prípade havárie alebo výnimo nej situácie na ceste
(zápche, obchádzke a pod.) automaticky predáva iným vozidlá alebo dispe ingu.
ilinská univerzita v iline Diplomová prácaKatedra telekomunikácií––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––
________________________________________________________________________
3
2 Analýza zbernicového systému vozidla a výber vhodnej
komunika nej zbernice na pripojenie senzorov
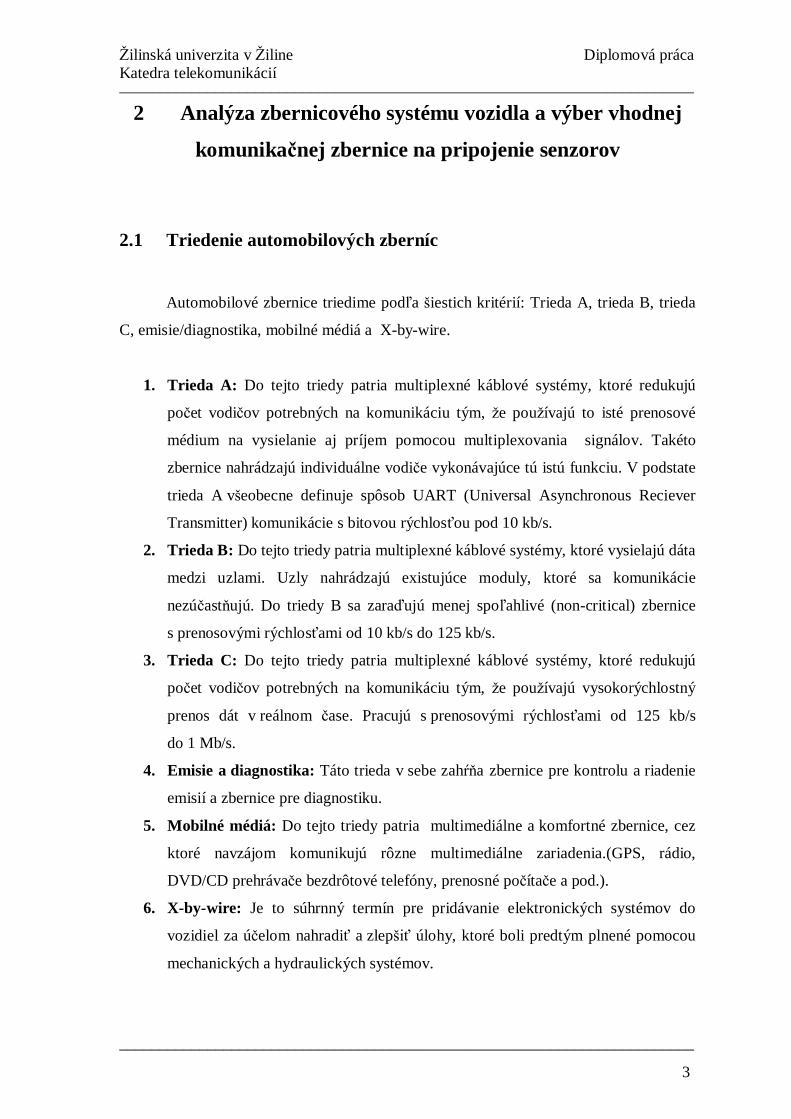
2.1 Triedenie automobilových zberníc
Automobilové zbernice triedime pod a iestich kritérií: Trieda A, trieda B, trieda
C, emisie/diagnostika, mobilné médiá a X-by-wire.
1. Trieda A: Do tejto triedy patria multiplexné káblové systémy, ktoré redukujú
po et vodi ov potrebných na komunikáciu tým, e pou ívajú to isté prenosové
médium na vysielanie aj príjem pomocou multiplexovania signálov. Takéto
zbernice nahrádzajú individuálne vodi e vykonávajúce tú istú funkciu. V podstate
trieda A v eobecne definuje spôsob UART (Universal Asynchronous Reciever
Transmitter) komunikácie s bitovou rýchlos ou pod 10 kb/s.
2. Trieda B: Do tejto triedy patria multiplexné káblové systémy, ktoré vysielajú dáta
medzi uzlami. Uzly nahrádzajú existujúce moduly, ktoré sa komunikácie
nezú ast ujú. Do triedy B sa zara ujú menej spo ahlivé (non-critical) zbernice
s prenosovými rýchlos ami od 10 kb/s do 125 kb/s.
3. Trieda C: Do tejto triedy patria multiplexné káblové systémy, ktoré redukujú
po et vodi ov potrebných na komunikáciu tým, e pou ívajú vysokorýchlostný
prenos dát v reálnom ase. Pracujú s prenosovými rýchlos ami od 125 kb/s
do 1 Mb/s.
4. Emisie a diagnostika: Táto trieda v sebe zah a zbernice pre kontrolu a riadenie
emisií a zbernice pre diagnostiku.
5. Mobilné médiá: Do tejto triedy patria multimediálne a komfortné zbernice, cez
ktoré navzájom komunikujú rôzne multimediálne zariadenia.(GPS, rádio,
DVD/CD prehráva e bezdrôtové telefóny, prenosné po íta e a pod.).
6. X-by-wire: Je to súhrnný termín pre pridávanie elektronických systémov do
vozidiel za ú elom nahradi a zlep úlohy, ktoré boli predtým plnené pomocou
mechanických a hydraulických systémov.
ilinská univerzita v iline Diplomová prácaKatedra telekomunikácií––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––
________________________________________________________________________
4
2.2 Preh ad a popis automobilových zberníc
V kapitole 2.2 sú popísané najpou ívanej ie automobilové zbernice, ich vlastnosti
základné parametre a mo nosti ich pou itia.
2.2.1 ZBERNICA MOST
MOST (Media Oriented Systems Transport) je vysoko rýchlostná multimediálna
zbernica optimalizovaná pre pou itie v automobiloch, ktorá ako prenosové médium
pou íva plastové optické vlákno. Ide o zbernicu typu bod-bod a jej sie ová topológia je
realizovaná ako kruh. Definície pre fyzickú vrstvu (elektrické a optické parametre),
aplika nú vrstvu, sie ovú vrstvu a riadenie prístupu na médium sú uvedené v pecifikácií
MOST Bus specification. Zbernica MOST poskytuje lacné optické rie enie na realizáciu
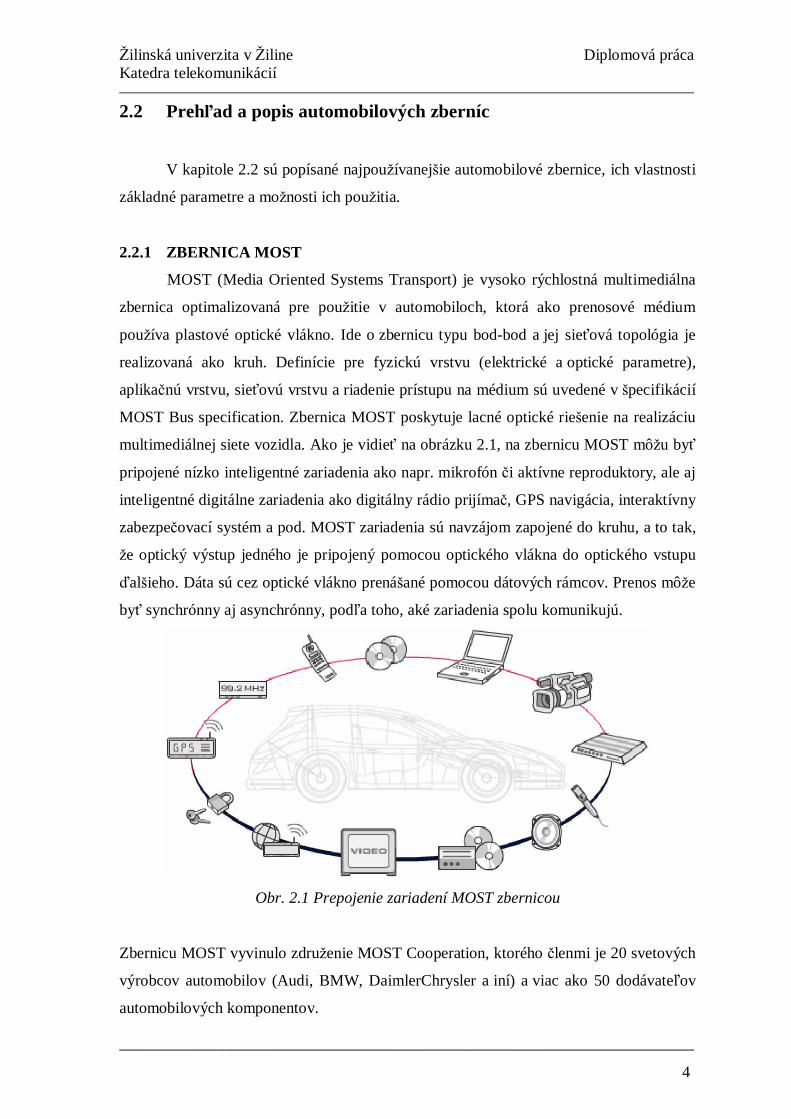
multimediálnej siete vozidla. Ako je vidie na obrázku 2.1, na zbernicu MOST mô u by
pripojené nízko inteligentné zariadenia ako napr. mikrofón i aktívne reproduktory, ale aj
inteligentné digitálne zariadenia ako digitálny rádio prijíma , GPS navigácia, interaktívny
zabezpe ovací systém a pod. MOST zariadenia sú navzájom zapojené do kruhu, a to tak,
e optický výstup jedného je pripojený pomocou optického vlákna do optického vstupu
al ieho. Dáta sú cez optické vlákno prená ané pomocou dátových rámcov. Prenos mô e
by synchrónny aj asynchrónny, pod a toho, aké zariadenia spolu komunikujú.
Obr. 2.1 Prepojenie zariadení MOST zbernicou
Zbernicu MOST vyvinulo zdru enie MOST Cooperation, ktorého lenmi je 20 svetových
výrobcov automobilov (Audi, BMW, DaimlerChrysler a iní) a viac ako 50 dodávate ov
automobilových komponentov.

ilinská univerzita v iline Diplomová prácaKatedra telekomunikácií––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––
________________________________________________________________________
5
2.2.2 ZBERNICA OBD2
OBD2 (On-Board Diagnostics 2) je zbernica pre kontrolu a riadenie emisií
a diagnostiku. Definuje komunika ný protokol a tandardný konektor pre
zhroma ovanie dát z automobilov. Bol vyvinutý pre pomoc pri kontrole a monitorovaní
emisií kodlivín motorových vozidiel. Jeho vývoj bol vy iadaný Americkou tátnou
organizáciou pre kontrolu emisií motorových vozidiel (U.S. EPA) a musí by pou itý vo
etkých osobných automobiloch a ahkých nákladných automobiloch vyrobených alebo
predávaných po roku 1996 v USA. Ka dé takéto vozidlo musí by vybavené kontrolkou
na prístrojovej doske (malfunction indicator lamp), ktorá signalizuje nesprávnu funkciu
motora a zvý enú produkciu kodlivín.
Na OBD2 konektor mô e by pripájané diagnostické zariadenie, komunikujúce
pod a tandardu spolo nosti automobilových in inierov SAE (Society of Automotive
Engineers) J1979. OBD2 tandard umo uje komunikáciu jedného diagnostického
zariadenia z viacerými typmi automobilových zberníc a to tak, e pod a typu zbernice
vozidla je táto zbernica pripojená na ur ené kontakty tandardného OBD2 konektora. Po
zasunutí diagnostického zariadenia do OBD2 konektora zariadenie automaticky zistí
o akú zbernicu ide.
Jednovodi ová zbernica J1850 VPW pou ívaná vo vozidlách GM (General Motors)
pou íva kontakty 2, 4, 5 a 16 OBD2 konektora.
Dvojvodi ová zbernica J1850 PWM pou ívaná vo vozidlách Ford vyu íva kontakty 2, 4,
5 a 10 OBD2 konektora.
Jednovodi ová zbernica (ISO 9141-2) po ívaná v automobiloch Chrysler vyu íva
kontakty 4, 5, 7, 15 a 16.
Komunikácia medzi diagnostickým zariadením a hociktorou z uvedených zberníc
prebieha pod a protokolu SAE J1979 a súbor pou ívaných príkazov je fixný.
Uvedený spôsob komunikácie zariadení pripojených na automobilovú zbernicu
a diagnostickým prístrojom je pou itý aj vo vozidlách so zbernicou CAN Bus.

ilinská univerzita v iline Diplomová prácaKatedra telekomunikácií––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––
________________________________________________________________________
6
2.2.3 ZBERNICA SAE J1850
Zbernica SAE J1850 patrí do triedy B automobilových zberníc a bola vyvinutá
v roku 1994. Je pou ívaná pre diagnostiku a dáta zdie ajúce aplikácie v cestných
a terénnych vozidlách.
Zbernica SAE J1850 má dva varianty:
• Variant A: Pou íva prenosovú rýchlos 41,6 kb/s s impulznou írkovou
moduláciou (PWM) a dvojvodi ové metalické prenosové médium.
• Variant B: Pou íva prenosovú rýchlos 10,4 kb/s s variabilnou írkou impulzov
(VPW) a jednovodi ové metalické prenosové médium.
Jednovodi ový spôsob prepojenia mô e dosahova d ku zbernice a 35 m
s maximálnym po tom uzlov 32. Vysoká logická úrove (High) nadobúda hodnoty od
4,25 V a 20 V a za nízku logickú úrove (low) je pova ovaná ka dá hodnota pod 3,5 V.
Vysoké a nízke logické hodnoty sú posielané ako bitové symboly a nie ako jednotlivé
bity. Doby trvania symbolov sú 64 s a 128 s pre jednovodi ovú zbernicu. Ak iaden
modul pripojený na zbernicu nevysiela, na zbernici je nízka úrove . Ak chce nejaký
modul za vysiela , potrebuje nastavi úrove na zbernici na vysokú.
Na zbernici SAE J1850 existujú dva spôsoby reprezentácie logických úrovní:
• pasívny – pasívna logická 1 je posielaná ako 128 s trvajúca nízka úrove
a pasívna logická 0 je posielaná ako 64 s trvajúca nízka úrove .
• aktívny – aktívna logická 1 je posielaná ako 64 s trvajúca vysoká úrove
a aktívna logická 0 je posielaná ako 128 s trvajúca vysoká úrove .
Protokol SAE J1850 pou íva spôsob riadenia prístupu na médium CSMA/CR (Carrier
Sense Multiple Access with Collision Resolution).
ilinská univerzita v iline Diplomová prácaKatedra telekomunikácií––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––
________________________________________________________________________
7
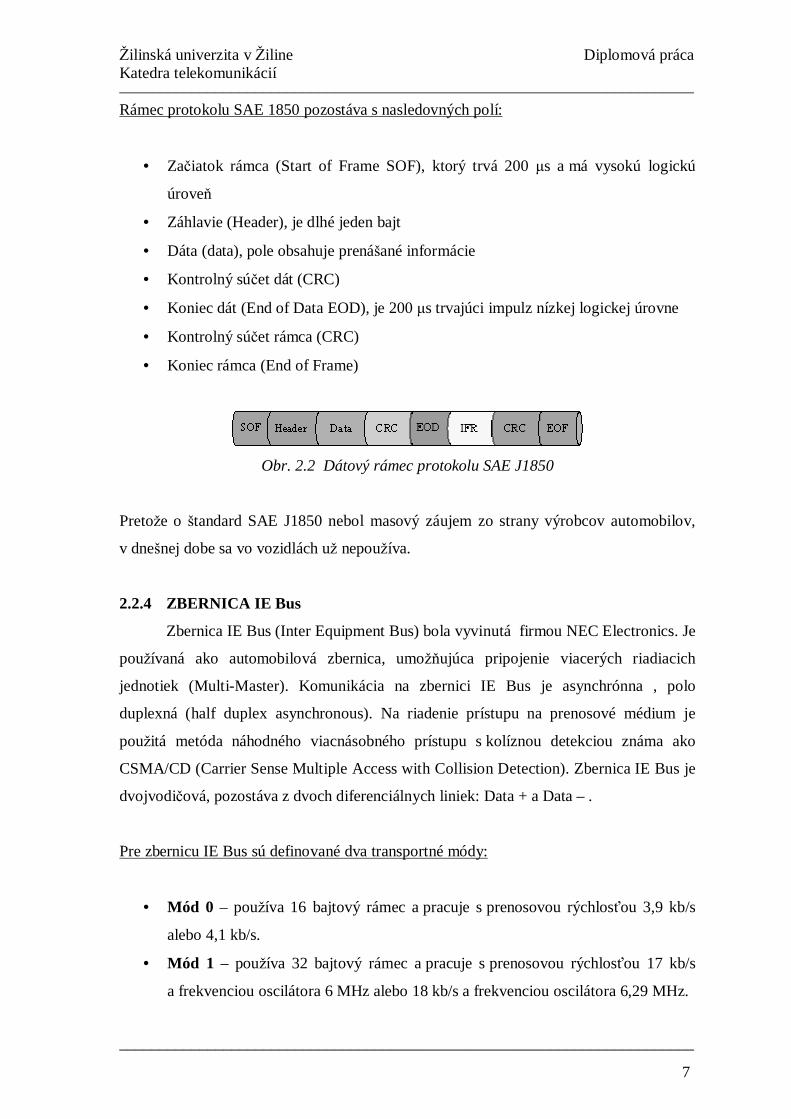
Rámec protokolu SAE 1850 pozostáva s nasledovných polí:
• Za iatok rámca (Start of Frame SOF), ktorý trvá 200 s a má vysokú logickú
úrove
• Záhlavie (Header), je dlhé jeden bajt
• Dáta (data), pole obsahuje prená ané informácie
• Kontrolný sú et dát (CRC)
• Koniec dát (End of Data EOD), je 200 s trvajúci impulz nízkej logickej úrovne
• Kontrolný sú et rámca (CRC)
• Koniec rámca (End of Frame)
Obr. 2.2 Dátový rámec protokolu SAE J1850
Preto e o tandard SAE J1850 nebol masový záujem zo strany výrobcov automobilov,
v dne nej dobe sa vo vozidlách u nepou íva.
2.2.4 ZBERNICA IE Bus
Zbernica IE Bus (Inter Equipment Bus) bola vyvinutá firmou NEC Electronics. Je
pou ívaná ako automobilová zbernica, umo ujúca pripojenie viacerých riadiacich
jednotiek (Multi-Master). Komunikácia na zbernici IE Bus je asynchrónna , polo
duplexná (half duplex asynchronous). Na riadenie prístupu na prenosové médium je
pou itá metóda náhodného viacnásobného prístupu s kolíznou detekciou známa ako
CSMA/CD (Carrier Sense Multiple Access with Collision Detection). Zbernica IE Bus je
dvojvodi ová, pozostáva z dvoch diferenciálnych liniek: Data + a Data – .
Pre zbernicu IE Bus sú definované dva transportné módy:
• Mód 0 – pou íva 16 bajtový rámec a pracuje s prenosovou rýchlos ou 3,9 kb/s
alebo 4,1 kb/s.
• Mód 1 – pou íva 32 bajtový rámec a pracuje s prenosovou rýchlos ou 17 kb/s
a frekvenciou oscilátora 6 MHz alebo 18 kb/s a frekvenciou oscilátora 6,29 MHz.
ilinská univerzita v iline Diplomová prácaKatedra telekomunikácií––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––
________________________________________________________________________
8
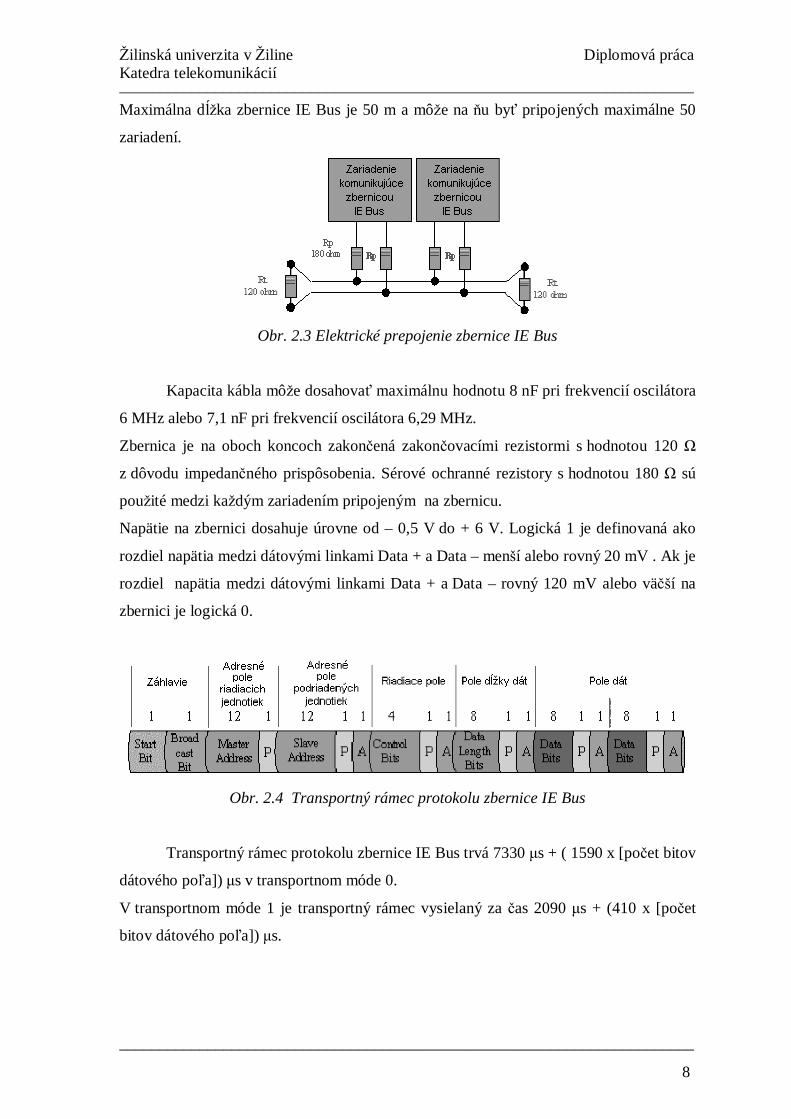
Maximálna d ka zbernice IE Bus je 50 m a mô e na u by pripojených maximálne 50
zariadení.
Obr. 2.3 Elektrické prepojenie zbernice IE Bus
Kapacita kábla mô e dosahova maximálnu hodnotu 8 nF pri frekvencií oscilátora
6 MHz alebo 7,1 nF pri frekvencií oscilátora 6,29 MHz.
Zbernica je na oboch koncoch zakon ená zakon ovacími rezistormi s hodnotou 120
z dôvodu impedan ného prispôsobenia. Sérové ochranné rezistory s hodnotou 180 sú
pou ité medzi ka dým zariadením pripojeným na zbernicu.
Napätie na zbernici dosahuje úrovne od – 0,5 V do + 6 V. Logická 1 je definovaná ako
rozdiel napätia medzi dátovými linkami Data + a Data – men í alebo rovný 20 mV . Ak je
rozdiel napätia medzi dátovými linkami Data + a Data – rovný 120 mV alebo vä í na
zbernici je logická 0.
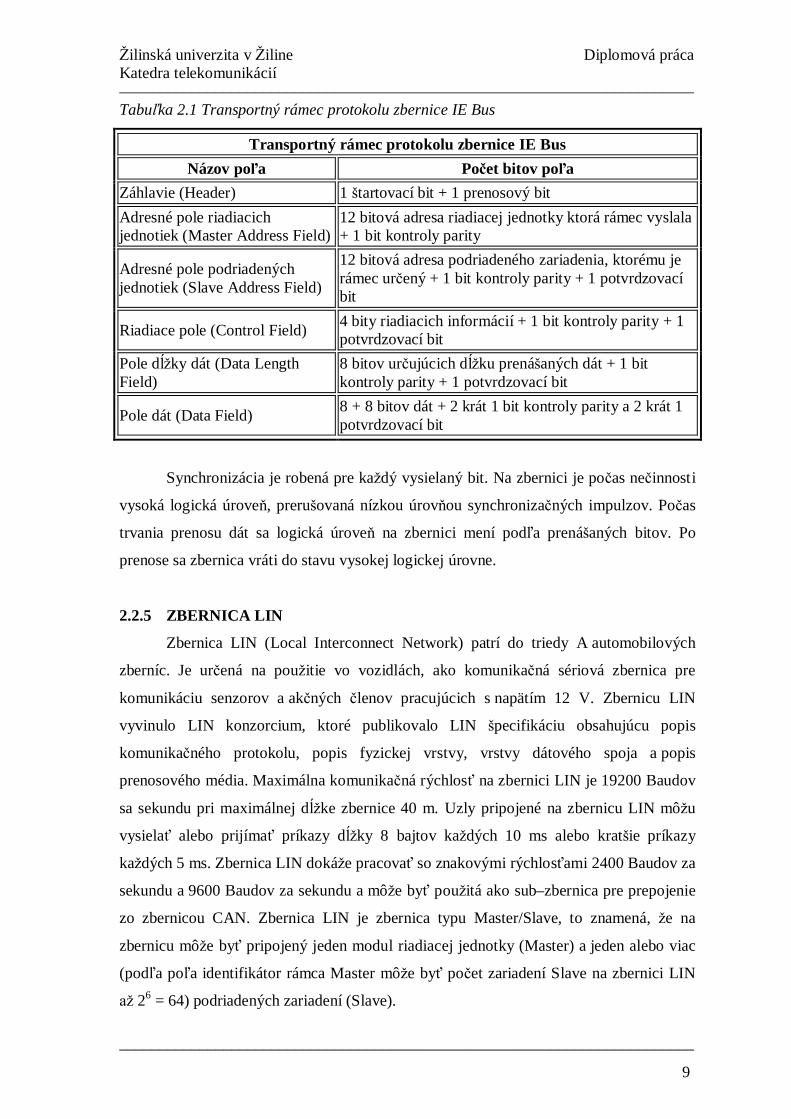
Obr. 2.4 Transportný rámec protokolu zbernice IE Bus
Transportný rámec protokolu zbernice IE Bus trvá 7330 s + ( 1590 x [po et bitov
dátového po a]) s v transportnom móde 0.
V transportnom móde 1 je transportný rámec vysielaný za as 2090 s + (410 x [po et
bitov dátového po a]) s.
ilinská univerzita v iline Diplomová prácaKatedra telekomunikácií––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––
________________________________________________________________________
9
Tabu ka 2.1 Transportný rámec protokolu zbernice IE Bus
Transportný rámec protokolu zbernice IE BusNázov po a Po et bitov po a
Záhlavie (Header) 1 tartovací bit + 1 prenosový bitAdresné pole riadiacichjednotiek (Master Address Field)
12 bitová adresa riadiacej jednotky ktorá rámec vyslala+ 1 bit kontroly parity
Adresné pole podriadenýchjednotiek (Slave Address Field)
12 bitová adresa podriadeného zariadenia, ktorému jerámec ur ený + 1 bit kontroly parity + 1 potvrdzovacíbit
Riadiace pole (Control Field) 4 bity riadiacich informácií + 1 bit kontroly parity + 1potvrdzovací bit
Pole d ky dát (Data LengthField)
8 bitov ur ujúcich d ku prená aných dát + 1 bitkontroly parity + 1 potvrdzovací bit
Pole dát (Data Field) 8 + 8 bitov dát + 2 krát 1 bit kontroly parity a 2 krát 1potvrdzovací bit
Synchronizácia je robená pre ka dý vysielaný bit. Na zbernici je po as ne innosti
vysoká logická úrove , preru ovaná nízkou úrov ou synchroniza ných impulzov. Po as
trvania prenosu dát sa logická úrove na zbernici mení pod a prená aných bitov. Po
prenose sa zbernica vráti do stavu vysokej logickej úrovne.
2.2.5 ZBERNICA LIN
Zbernica LIN (Local Interconnect Network) patrí do triedy A automobilových
zberníc. Je ur ená na pou itie vo vozidlách, ako komunika ná sériová zbernica pre
komunikáciu senzorov a ak ných lenov pracujúcich s napätím 12 V. Zbernicu LIN
vyvinulo LIN konzorcium, ktoré publikovalo LIN pecifikáciu obsahujúcu popis
komunika ného protokolu, popis fyzickej vrstvy, vrstvy dátového spoja a popis
prenosového média. Maximálna komunika ná rýchlos na zbernici LIN je 19200 Baudov
sa sekundu pri maximálnej d ke zbernice 40 m. Uzly pripojené na zbernicu LIN mô u
vysiela alebo prijíma príkazy d ky 8 bajtov ka dých 10 ms alebo krat ie príkazy
ka dých 5 ms. Zbernica LIN doká e pracova so znakovými rýchlos ami 2400 Baudov za
sekundu a 9600 Baudov za sekundu a mô e by pou itá ako sub–zbernica pre prepojenie
zo zbernicou CAN. Zbernica LIN je zbernica typu Master/Slave, to znamená, e na
zbernicu mô e by pripojený jeden modul riadiacej jednotky (Master) a jeden alebo viac
(pod a po a identifikátor rámca Master mô e by po et zariadení Slave na zbernici LIN
26 = 64) podriadených zariadení (Slave).

ilinská univerzita v iline Diplomová prácaKatedra telekomunikácií––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––
________________________________________________________________________
10
Zbernica LIN nepotrebuje rozhodova a riadi prístup na médium, preto e na
zbernici je povolený iba jeden dátový blok v jednom ase. Komunikáciu v dy iniciuje
riadiaca jednotka vyslaním rámca Master, ktorý obsahuje adresné pole s adresou jedného
s pripojených podriadených zariadení. Adresované podriadené zariadenie odpovedá
riadiacej jednotke vyslaním rámca Slave. Po as tejto komunikácie ostatné uzly pripojené
na zbernicu nevysielajú.
Tabu ka 2.2 Rámec Master zbernice LIN
Rámec Master zbernice LIN
Názov po a ka po a
Za iatok rámca (Sync. break) 13 bitov
Synchroniza né pole (Sync. field)Striedajúce sa 1 a 0 pre hodinovú
synchronizáciu uzlov
Identifikátor, adresa podriadenej jednotky
(Identifier)
6 bitová adresa zariadenia Slave a 2 bity
kontrola parity
Pole dát (Data field) 2, 4 alebo 8 bajtov dát
Tabu ka 2.3 Rámec Slave zbernice LIN
Rámec Slave zbernice LIN
Názov po a ka po a
Pole dát (Data field) 1 a 8 bajtov dát
Kontrolný sú et (CRC) 8 bitov
Obr. 2.5 Rámec Master zbernice LIN Obr. 2.6 Rámec Slave zbernice LIN
ilinská univerzita v iline Diplomová prácaKatedra telekomunikácií––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––
________________________________________________________________________
11
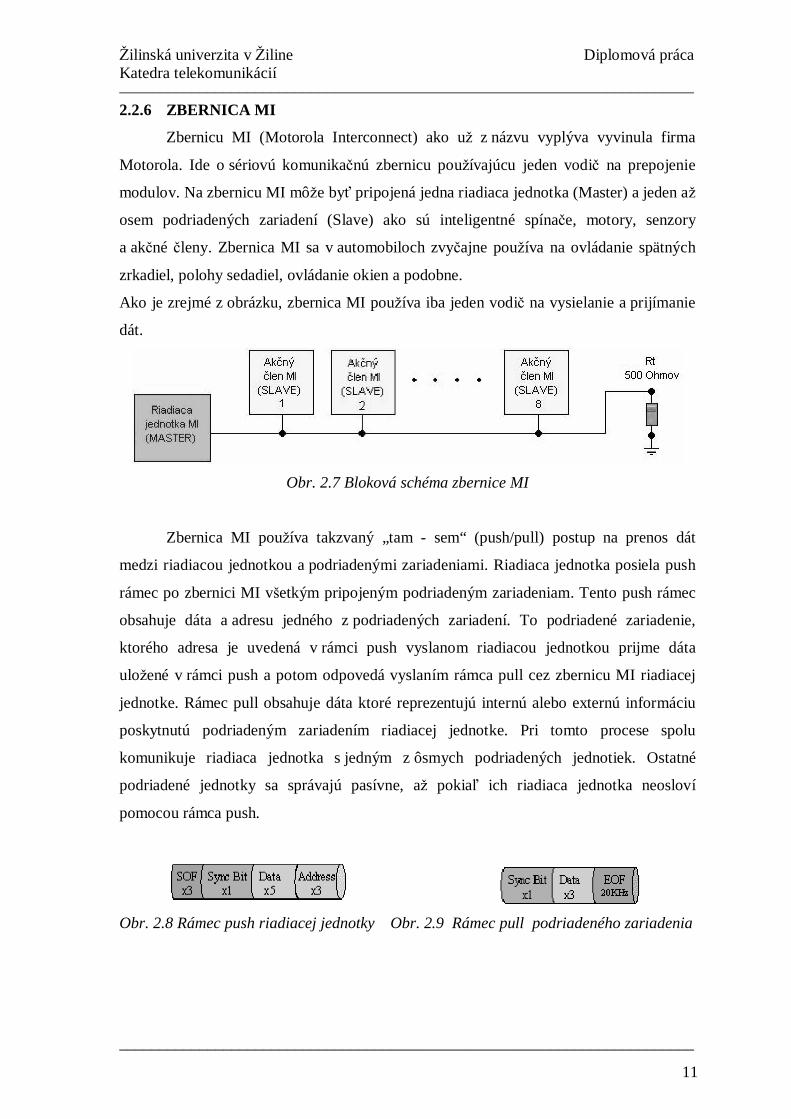
2.2.6 ZBERNICA MI
Zbernicu MI (Motorola Interconnect) ako u z názvu vyplýva vyvinula firma
Motorola. Ide o sériovú komunika nú zbernicu pou ívajúcu jeden vodi na prepojenie
modulov. Na zbernicu MI mô e by pripojená jedna riadiaca jednotka (Master) a jeden a
osem podriadených zariadení (Slave) ako sú inteligentné spína e, motory, senzory
a ak né leny. Zbernica MI sa v automobiloch zvy ajne pou íva na ovládanie spätných
zrkadiel, polohy sedadiel, ovládanie okien a podobne.
Ako je zrejmé z obrázku, zbernica MI pou íva iba jeden vodi na vysielanie a prijímanie
dát.
Obr. 2.7 Bloková schéma zbernice MI
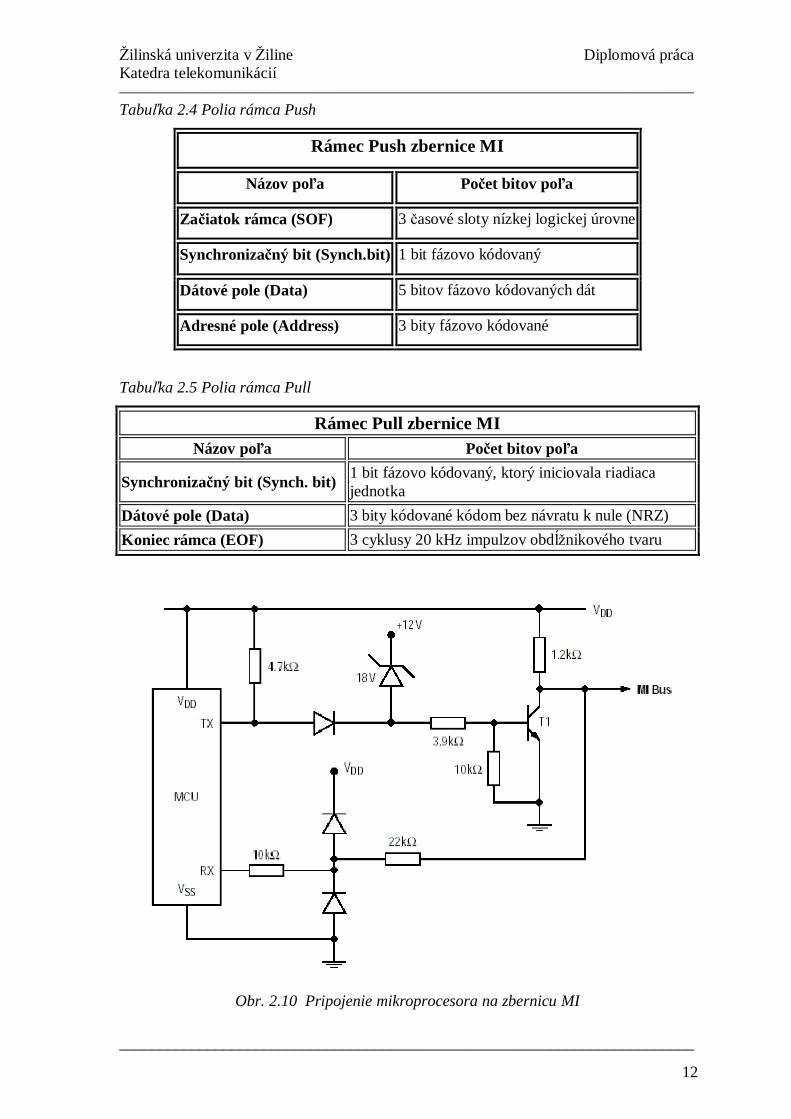
Zbernica MI pou íva takzvaný „tam - sem“ (push/pull) postup na prenos dát
medzi riadiacou jednotkou a podriadenými zariadeniami. Riadiaca jednotka posiela push
rámec po zbernici MI v etkým pripojeným podriadeným zariadeniam. Tento push rámec
obsahuje dáta a adresu jedného z podriadených zariadení. To podriadené zariadenie,
ktorého adresa je uvedená v rámci push vyslanom riadiacou jednotkou prijme dáta
ulo ené v rámci push a potom odpovedá vyslaním rámca pull cez zbernicu MI riadiacej
jednotke. Rámec pull obsahuje dáta ktoré reprezentujú internú alebo externú informáciu
poskytnutú podriadeným zariadením riadiacej jednotke. Pri tomto procese spolu
komunikuje riadiaca jednotka s jedným z ôsmych podriadených jednotiek. Ostatné
podriadené jednotky sa správajú pasívne, a pokia ich riadiaca jednotka neosloví
pomocou rámca push.
Obr. 2.8 Rámec push riadiacej jednotky Obr. 2.9 Rámec pull podriadeného zariadenia
ilinská univerzita v iline Diplomová prácaKatedra telekomunikácií––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––
________________________________________________________________________
12
Tabu ka 2.4 Polia rámca Push
Rámec Push zbernice MI
Názov po a Po et bitov po a
Za iatok rámca (SOF) 3 asové sloty nízkej logickej úrovne
Synchroniza ný bit (Synch.bit) 1 bit fázovo kódovaný
Dátové pole (Data) 5 bitov fázovo kódovaných dát
Adresné pole (Address) 3 bity fázovo kódované
Tabu ka 2.5 Polia rámca Pull
Rámec Pull zbernice MINázov po a Po et bitov po a
Synchroniza ný bit (Synch. bit) 1 bit fázovo kódovaný, ktorý iniciovala riadiacajednotka
Dátové pole (Data) 3 bity kódované kódom bez návratu k nule (NRZ)Koniec rámca (EOF) 3 cyklusy 20 kHz impulzov obd nikového tvaru
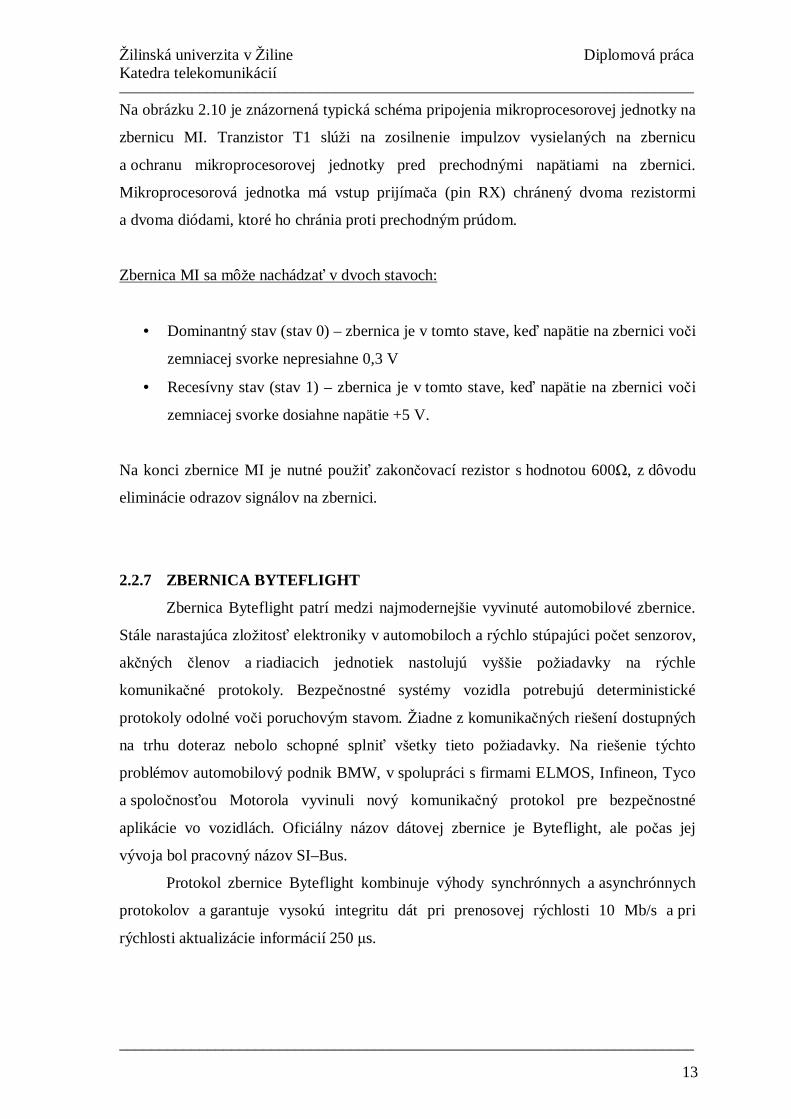
Obr. 2.10 Pripojenie mikroprocesora na zbernicu MI
ilinská univerzita v iline Diplomová prácaKatedra telekomunikácií––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––
________________________________________________________________________
13
Na obrázku 2.10 je znázornená typická schéma pripojenia mikroprocesorovej jednotky na
zbernicu MI. Tranzistor T1 slú i na zosilnenie impulzov vysielaných na zbernicu
a ochranu mikroprocesorovej jednotky pred prechodnými napätiami na zbernici.
Mikroprocesorová jednotka má vstup prijíma a (pin RX) chránený dvoma rezistormi
a dvoma diódami, ktoré ho chránia proti prechodným prúdom.
Zbernica MI sa mô e nachádza v dvoch stavoch:
• Dominantný stav (stav 0) – zbernica je v tomto stave, ke napätie na zbernici vo i
zemniacej svorke nepresiahne 0,3 V
• Recesívny stav (stav 1) – zbernica je v tomto stave, ke napätie na zbernici vo i
zemniacej svorke dosiahne napätie +5 V.
Na konci zbernice MI je nutné pou zakon ovací rezistor s hodnotou 600 , z dôvodu
eliminácie odrazov signálov na zbernici.
2.2.7 ZBERNICA BYTEFLIGHT
Zbernica Byteflight patrí medzi najmodernej ie vyvinuté automobilové zbernice.
Stále narastajúca zlo itos elektroniky v automobiloch a rýchlo stúpajúci po et senzorov,
ak ných lenov a riadiacich jednotiek nastolujú vy ie po iadavky na rýchle
komunika né protokoly. Bezpe nostné systémy vozidla potrebujú deterministické
protokoly odolné vo i poruchovým stavom. iadne z komunika ných rie ení dostupných
na trhu doteraz nebolo schopné splni v etky tieto po iadavky. Na rie enie týchto
problémov automobilový podnik BMW, v spolupráci s firmami ELMOS, Infineon, Tyco
a spolo nos ou Motorola vyvinuli nový komunika ný protokol pre bezpe nostné
aplikácie vo vozidlách. Oficiálny názov dátovej zbernice je Byteflight, ale po as jej
vývoja bol pracovný názov SI–Bus.
Protokol zbernice Byteflight kombinuje výhody synchrónnych a asynchrónnych
protokolov a garantuje vysokú integritu dát pri prenosovej rýchlosti 10 Mb/s a pri
rýchlosti aktualizácie informácií 250 s.
ilinská univerzita v iline Diplomová prácaKatedra telekomunikácií––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––
________________________________________________________________________
14
al ie charakteristiky sú bez kolízny prístup na médium, adresovanie orientované
na správy prostredníctvom identifikátorov, garantovanie oneskorenia pre ur itý po et
vysoko prioritných správ, vysoká flexibilita, jednoduché roz írenie systému, dynamické
vyu itie írky pásma a nízke prevádzkové náklady. Za ú elom zmen elektromagnetické
ru enie (EMI), je fyzická vrstva rie ená opticky a pou ité prenosové médium je plastické
optické vlákno (Plastic Optic Fiber).
Zbernica Byteflight pou íva topológiu hviezda s inteligentným spojovacím blokom.
Vlastnosti zbernicového systému Byteflight rie ia mnohé problémy dnes pou ívaných
automobilových zberníc, o by mohlo vies k tomu, e by sa zbernicový systém
Byteflight stal tandardom v automobilovom priemysle.
Protokol zbernice Byteflight:
• Ide o nový protokol kombinujúci asový a prioritný prístup na zbernicu
• Byteflight kombinuje výhody synchrónnych a asynchrónnych protokolov
• Bezkolízna komunikácia
• Prenosová rýchlos 10 Mb/s (celkovo), pri plnej zá i zbernice viac ako 5 Mb/s
• Protokolom a fyzickou vrstvou garantované oneskorenie pre vysoko prioritné
správy, protokolom zaru ené doru enie správ
• Flexibilný prístup na zbernicu nízko prioritných správ ako pri asynchrónnych
protokoloch ( tatistický re im)
• Kontrola oneskorenia asynchrónnych správ je podporovaná simula nými
prostriedkami.
Fyzická vrstva:
• Hviezdová topológia s obojsmernou poloduplexnou komunikáciou cez plastické
optické vlákno
• Vysiela a prijíma spolu na jednom ipe s LED a foto diódou integrovanými
v optickom konektore
• Kódovanie kódom bez návratu k nule (NRZ)
• Mo nos zní enia prenosovej rýchlosti s elektrickým transceiverom (napr. CAN
Bus transceiverom)
ilinská univerzita v iline Diplomová prácaKatedra telekomunikácií––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––
________________________________________________________________________
15
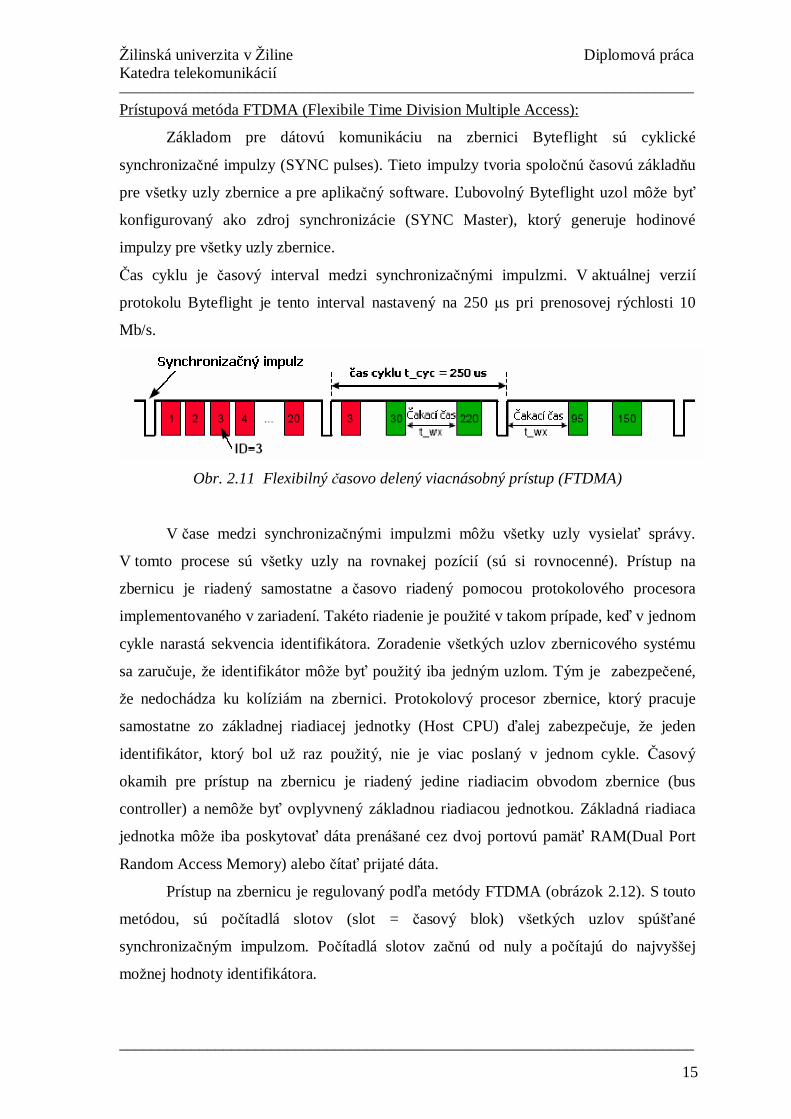
Prístupová metóda FTDMA (Flexibile Time Division Multiple Access):
Základom pre dátovú komunikáciu na zbernici Byteflight sú cyklické
synchroniza né impulzy (SYNC pulses). Tieto impulzy tvoria spolo nú asovú základ u
pre v etky uzly zbernice a pre aplika ný software. ubovolný Byteflight uzol mô e by
konfigurovaný ako zdroj synchronizácie (SYNC Master), ktorý generuje hodinové
impulzy pre v etky uzly zbernice.
as cyklu je asový interval medzi synchroniza nými impulzmi. V aktuálnej verzií
protokolu Byteflight je tento interval nastavený na 250 s pri prenosovej rýchlosti 10
Mb/s.
Obr. 2.11 Flexibilný asovo delený viacnásobný prístup (FTDMA)
V ase medzi synchroniza nými impulzmi mô u v etky uzly vysiela správy.
V tomto procese sú v etky uzly na rovnakej pozícií (sú si rovnocenné). Prístup na
zbernicu je riadený samostatne a asovo riadený pomocou protokolového procesora
implementovaného v zariadení. Takéto riadenie je pou ité v takom prípade, ke v jednom
cykle narastá sekvencia identifikátora. Zoradenie v etkých uzlov zbernicového systému
sa zaru uje, e identifikátor mô e by pou itý iba jedným uzlom. Tým je zabezpe ené,
e nedochádza ku kolíziám na zbernici. Protokolový procesor zbernice, ktorý pracuje
samostatne zo základnej riadiacej jednotky (Host CPU) alej zabezpe uje, e jeden
identifikátor, ktorý bol u raz pou itý, nie je viac poslaný v jednom cykle. asový
okamih pre prístup na zbernicu je riadený jedine riadiacim obvodom zbernice (bus
controller) a nemô e by ovplyvnený základnou riadiacou jednotkou. Základná riadiaca
jednotka mô e iba poskytova dáta prená ané cez dvoj portovú pamä RAM(Dual Port
Random Access Memory) alebo íta prijaté dáta.
Prístup na zbernicu je regulovaný pod a metódy FTDMA (obrázok 2.12). S touto
metódou, sú po ítadlá slotov (slot = asový blok) v etkých uzlov spú ané
synchroniza ným impulzom. Po ítadlá slotov za nú od nuly a po ítajú do najvy ej
mo nej hodnoty identifikátora.
ilinská univerzita v iline Diplomová prácaKatedra telekomunikácií––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––
________________________________________________________________________
16
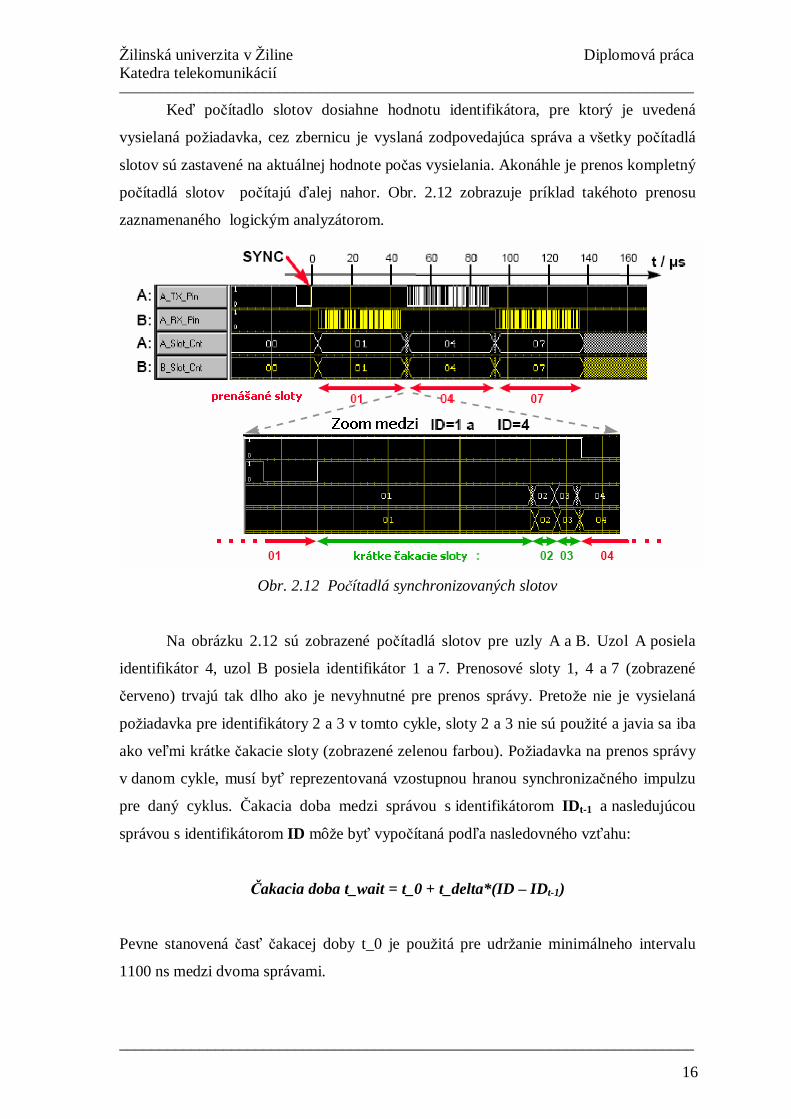
Ke po ítadlo slotov dosiahne hodnotu identifikátora, pre ktorý je uvedená
vysielaná po iadavka, cez zbernicu je vyslaná zodpovedajúca správa a v etky po ítadlá
slotov sú zastavené na aktuálnej hodnote po as vysielania. Akonáhle je prenos kompletný
po ítadlá slotov po ítajú alej nahor. Obr. 2.12 zobrazuje príklad takéhoto prenosu
zaznamenaného logickým analyzátorom.
Obr. 2.12 Po ítadlá synchronizovaných slotov
Na obrázku 2.12 sú zobrazené po ítadlá slotov pre uzly A a B. Uzol A posiela
identifikátor 4, uzol B posiela identifikátor 1 a 7. Prenosové sloty 1, 4 a 7 (zobrazené
erveno) trvajú tak dlho ako je nevyhnutné pre prenos správy. Preto e nie je vysielaná
po iadavka pre identifikátory 2 a 3 v tomto cykle, sloty 2 a 3 nie sú pou ité a javia sa iba
ako ve mi krátke akacie sloty (zobrazené zelenou farbou). Po iadavka na prenos správy
v danom cykle, musí by reprezentovaná vzostupnou hranou synchroniza ného impulzu
pre daný cyklus. akacia doba medzi správou s identifikátorom IDt-1 a nasledujúcou
správou s identifikátorom ID mô e by vypo ítaná pod a nasledovného vz ahu:
akacia doba t_wait = t_0 + t_delta*(ID IDt-1)
Pevne stanovená as akacej doby t_0 je pou itá pre udr anie minimálneho intervalu
1100 ns medzi dvoma správami.

ilinská univerzita v iline Diplomová prácaKatedra telekomunikácií––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––
________________________________________________________________________
17
Preto e optimálne hodnoty pre t_0 a t_delta sú odvodené z dôb írenia signálu
zbernicovým systémom, tieto parametre sú realizované programovo v Byteflight
moduloch. Procedúra FTDMA popísaná vy ie je teda isto asovo riadená metóda
prístupu na zbernicu. Napriek tomu táto metóda umo uje garantova alebo
deterministicky prená presný po et vysoko prioritných správ v ka dom
komunika nom cykle dokonca, ke kapacita zbernice je plne vyu itá a sú asne povo uje
flexibilné a tatistické pridelenie írky pásma pre zvy né správy, ak zá zbernice je
dostato ne nízka. Toto mô eme vidie na obrázku 2.13.
Obr. 2.13 Synchrónny a asynchrónny prenos
V opera nom móde je zobrazených 10 vysoko prioritných správ (znázornených
ervenou farbou). Sú prená ané synchrónne a cyklicky ka dých 250 s. Druhá as
komunika ného cyklu (znázornená zelenou farbou) mô e by pou itá pre správy
vysielané pri náhodnej udalosti (event-controlled messages).
Napriek garantovanému prenosu presného po tu vysoko prioritných správ, flexibilita nie
je stratená. Je mo né pridáva vysoko prioritné správy a garantovanie prenosu týchto
správ mô e by dokázané analyticky. Je alej mo né pridáva asynchrónne správy.
V tomto prípade, overenie oneskorenia mô e by najvhodnej ie cez tatistické
pozorovania, ako napríklad z CAN protokolom. Nie je nevyhnutné robi softvérové
zmeny uzlov, ktoré sú u pou ité v systéme.
truktúra správy protokolu zbernice Byteflight:
Správa zbernice byteflight je znázornená na obrázku 2.14. Pozostáva zo 6 bitovej
tartovacej sekvencie, jedno bajtového identifikátora ID, jedno bajtového po a d ky
správy LEN, 0 a 12 bajtov dát D0a D11 a dvoch bajtov kontrolného sú tu CRCH
(Cyclic Redundancy Check). Vysoká úrove integrity dát je zabezpe ená kontrolným
sú tom, ktorého Hammingova vzdialenos je h = 6.

ilinská univerzita v iline Diplomová prácaKatedra telekomunikácií––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––
________________________________________________________________________
18
Pre bitovú synchronizáciu, je ka dý bajt rámcovaný jedným tartovacím bitom
a jedným stop bitom. as trvania jedného bitu je 100 ns pri prenosovej rýchlosti 10 Mb/s.
Obr. 2.14 Formát správy zbernica Byteflight
Flexibilita:
Technológia Byteflight umo uje jednoduché roz írenie systému pridaním al ích
funkcií do riadiacich jednotiek, ktoré sú u v systéme pou ité, alebo za lenením vä ieho
po tu zbernicových uzlov (napríklad volite ná výbava automobilu). Systém mô e by
doplnený novými správami bez zmeny softvéru existujúcich kontrolných jednotiek, ktoré
sú u prispôsobené. Charakteristiky systémového roz írenia umo ujú vysoký stupe
flexibility vo výrobe (rozdielne mo nosti výbavy s rovnakými podzostavami). Taktie
umo ujú pou rovnaké riadiace jednotky v rozdielnych modeloch automobilov
a s rozdielnou konfiguráciou elektrického systému vozidla.
Tabu ka 2.6 Porovnanie zberníc CAN Bus a Byteflight
Vlastnosti CAN–Bus ByteflightPrenos správ asynchrónny asynchrónny a synchrónny
Identifikácia správy identifikátor správy identifikátor správyPrenosová rýchlos 1 Mb/s 10 Mb/sBitové kódovanie NRZ s bitovým vypl ovaním NRZ so tart a stop bitmi
Fyzická vrstva transceivery a do 1 Mb/s optické transceivery a do 10Mb/s
asová nestabilita(jitter) závislá na za ení zbernice kon tantná pre prioritné správy
pod a t_cycHodinová
synchronizácia nie je poskytovaná poskytovaná riadiacoujednotkou v 100 ns intervaloch
Obmedzenie chýbna fyzickej vrstve zabezpe ované paritne zabezpe ované optickým
vláknomDostupnos
komponentovnieko ko rodín mikroprocesorov,
transceiverov a radi ovHC 12BD32, E100.38
byteflight radi , E100.39

ilinská univerzita v iline Diplomová prácaKatedra telekomunikácií––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––
________________________________________________________________________
19
2.2.8 ZBERNICA CAN-BUS
Zbernica CAN-BUS (Controller Area Network – Bitserielle Universelle
Schnittstelle), ktorú v roku 1986 vyvinula firma Robert Bosch je v sú asnosti
najpou ívanej ou zbernicou v moderných automobiloch.
Sériová zbernica CAN je pou ite ná v ade, kde majú navzájom komunikova viac ako
dve zariadenia na báze mikropo íta a. Jej roz íreniu prispelo aj to, e americký a
výrobcovia z alekého východu sa rozhodli pou ju do automobilov. K jej konkurencie
schopnosti napomáha aj vynikajúci pomer cena/výkon. Obrovskou výhodou CAN je to,
e umo uje komunikáciu medzi rôznymi výrobkami od rôznych výrobcov.
Na CAN-BUS je v moderných automobiloch napojená prakticky celá elektronická
sústava (napríklad sledovanie otá ok, vstrekovanie paliva, zapa ovanie, katalyzátor, ABS
a al ie). Rýchlym prepojením dát je dosiahnutá perfektná súhra v etkých elektronických
komponentov. Okrem zna ného zjednodu enia prepojenia a ve mi rýchleho prenosu
údajov medzi riadiacimi jednotkami dochádza aj k úspore miesta a hmotnosti v aka
men ím rozmerom riadiacich jednotiek a men ím svorkovniciam. Tie sa zvy uje
spo ahlivos vozidla ako celku, nako ko dochádza k sústavnej kontrole
a vyhodnocovaniu prevádzkových parametrov zo v etkých dôle itých mechanických
a elektrických blokov. al ou výhodou je flexibilnos a kálovate nos . Nielen e je
mo né pridáva al ie elektronické bloky a zariadenia, zbernica CAN dovo uje v prípade
potreby aj roz írenie prenosového protokolu. Medzi podstatné výhody CAN zbernice tie
patrí to, e zbernica CAN je normalizovaná ( ISO 11898 ), tak e je mo ný prenos údajov
medzi jednotkami a diagnostickými prístrojmi rôznych výrobcov.
Protokol CAN bol navrhnutý tak, aby umo nil distribuované riadenie systémov
v reálnom ase s prenosovou rýchlos ou do 1 Mb/s a vysokým stup om zabezpe enia
prenosu proti chybám. Jedná sa o protokol typu multi-master, kde ka dý uzol zbernice
mô e by master a riadi tak chovanie iných uzlov. Nie je teda nutné riadi celú sie
z jedného nadriadeného uzla, o priná a zjednodu enie riadenia a zvy uje spo ahlivos
(pri poruche jedného uzla mô e zbytok siete pracova alej). Po zbernici prebieha
komunikácia medzi dvoma uzlami pomocou správ (dátová správa a iados
o dáta). Mana ment siete (signalizácia chýb, pozastavenie komunikácie) je zaistený
pomocou dvoch peciálnych správ (chybovej správy a správy o pre ení).

ilinská univerzita v iline Diplomová prácaKatedra telekomunikácií––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––
________________________________________________________________________
20
Správy vysielané po zbernici protokolom CAN neobsahujú iadnu informáciu
o cie ovom uzle, ktorému sú ur ené a sú prijímané v etkými ostatnými uzlami
pripojenými ku zbernici. Ka dá správa obsahuje identifikátor, ktorý udáva význam
prená anej správy a jej prioritu. Najvy iu prioritu má správa s identifikátorom 0.
Protokol CAN zais uje, aby správa s vy ou prioritou bola v prípade kolízie dvoch správ
doru ená prednostne. alej je mo né na základe identifikátoru zaisti , aby uzol prijímal
iba tie správy, ktoré sa ho týkajú (Acceptance Filtering).
Obr. 2.15 Komunikácia na zbernici CAN
Protokol CAN je obvykle realizovaný za pomoci komer ne dostupných radi ov
CAN. Existuje ve ké mno stvo vhodných obvodov od rôznych výrobcov. Limitujúcim
faktorom pri návrhu je po adovaná priepustnos dát a úrove po adovanej integrácie. Ak
po adujeme od zariadenia funk nos pri vysokých prenosových rýchlostiach (do 1 Mb/s)
a silnej prevádzke na zbernici, je nutné rie návrh tak, aby aplikácia stihla prijíma
správy a reagova na ne. Toho sa dá dosiahnu napríklad pou itím výkonného
mikroprocesora s integrovanou podporou protokolu CAN. Podrobný popis protokolu
CAN je uvedený v prílohe íslo 1.
ECAN (Enhanced Controller Area Network) modul (uzol, zariadenie) je posledné
roz írenie existujúcich CAN modulov. ECAN ponúka ve a roz írení oproti klasickým
CAN modulom a to najmä viac vstupno-výstupných vyrovnávacích pamätí, viac filtrov
prijímaných správ a sú naviac vybavené funkciou FIFO (First In First Out) o je vlastne
typ pamätí, realizovaných posuvnými registrami.
ilinská univerzita v iline Diplomová prácaKatedra telekomunikácií––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––
________________________________________________________________________
21
ECAN moduly sú naviac plne spätne kompatibilné s klasickými CAN modulmi.
ECAN poskytuje tri módy innosti – Mód 0, mód 1 a mód 2. V móde 0 je plne spätne
kompatibilný s klasickými CAN modulmi. Aplikácie vyvinuté pre klasické CAN moduly
budú alej pracova bez akýchko vek zmien pou itím modulov ECAN. Mód 1 je
roz írený klasický mód s vä ím po tom vyrovnávacích vstupno-výstupných pamätí
a filtrov správ. Mód 2 má rovnaké prostriedky ako mód 1, ale má naviac technicky
mana ovanú prijímaciu pamä FIFO (hardware managed recieve FIFO), ktorá poskytuje
vä ie mo nosti a flexibilitu a tak ECAN moduly mô u overi funk nos mnohých CAN
aplikácií.
Hlavné vlastnosti ECAN modulu sú:
• Plne spätne kompatibilný s klasickými CAN modulmi
• Tri opera né módy:
- Mód 0 – Plne spätne kompatibilný mód
- Mód 1 – Roz írený klasický mód
- Mód 2 – Hardware FIFO mód
• Implementácia CAN protokolov CAN 1.2, CAN 2.0A, CAN 2.0B
• Podpora tandardného a roz íreného dátového rámca
• ka dát od 0 do 8 bajtov
• Programovate ná prenosová rýchlos do 1 Mb/s
• Podpora automatického vysielania rámca iadosti o dáta
• Priradený dvojitý ochranný prijíma
• Tri priradené vysielacie vyrovnávacie pamäte so schopnos ou pecifikova
prioritu správy a mo nos ou preru vysielanie
• es plne programovate ných vstupno/výstupných pamätí
• estnás akcepta ných filtrov s dynamickou spoluprácou s prijímacími
vyrovnávacími pamä ami
• Tri masky akcepta ných filtrov s dynamickou spoluprácou s prijímacími filtrami
• Programovate ná funkcia zobudenia s integrovaným dolno-priepustným filtrom
• Signalizácia prijatých a vysielaných chýb v etkých CAN uzlov
• Programovate ný zdroj hodinových impulzov
• Podpora nízko príkonového re imu spánku
• Podpora roz íreného mana mentu spracovania chýb
ilinská univerzita v iline Diplomová prácaKatedra telekomunikácií––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––
________________________________________________________________________
22
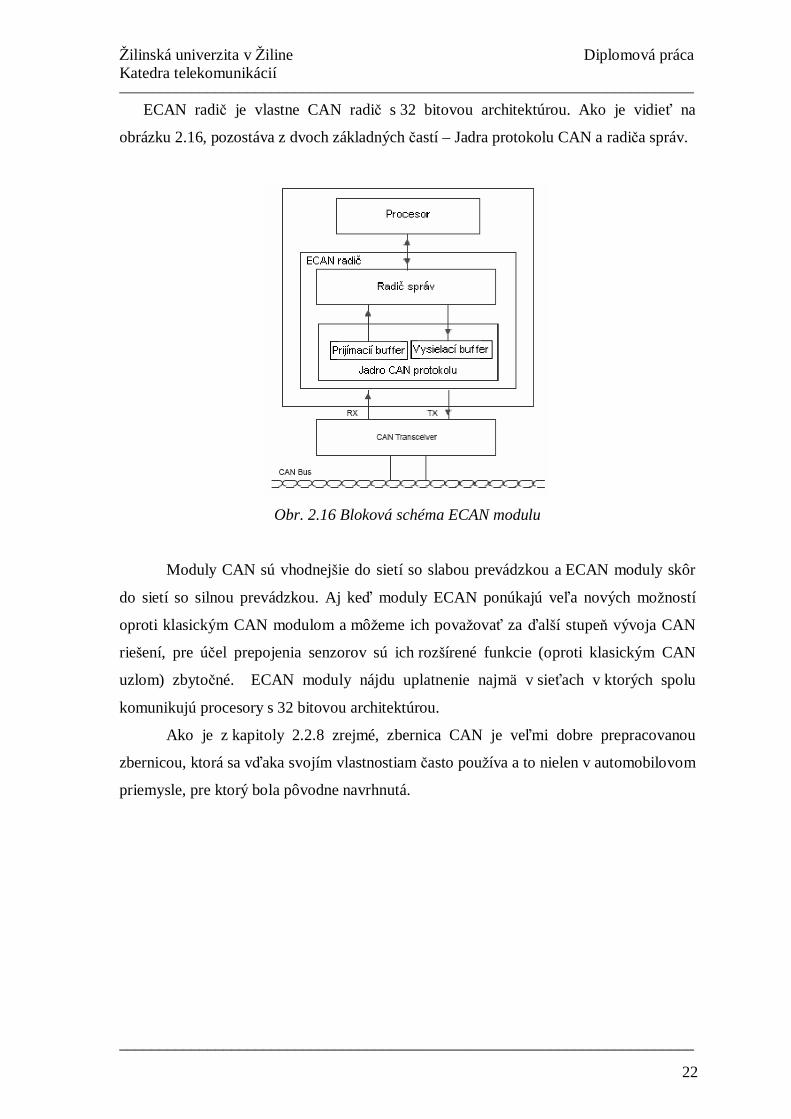
ECAN radi je vlastne CAN radi s 32 bitovou architektúrou. Ako je vidie na
obrázku 2.16, pozostáva z dvoch základných astí – Jadra protokolu CAN a radi a správ.
Obr. 2.16 Bloková schéma ECAN modulu
Moduly CAN sú vhodnej ie do sietí so slabou prevádzkou a ECAN moduly skôr
do sietí so silnou prevádzkou. Aj ke moduly ECAN ponúkajú ve a nových mo ností
oproti klasickým CAN modulom a mô eme ich pova ova za al í stupe vývoja CAN
rie ení, pre ú el prepojenia senzorov sú ich roz írené funkcie (oproti klasickým CAN
uzlom) zbyto né. ECAN moduly nájdu uplatnenie najmä v sie ach v ktorých spolu
komunikujú procesory s 32 bitovou architektúrou.
Ako je z kapitoly 2.2.8 zrejmé, zbernica CAN je ve mi dobre prepracovanou
zbernicou, ktorá sa v aka svojím vlastnostiam asto pou íva a to nielen v automobilovom
priemysle, pre ktorý bola pôvodne navrhnutá.
ilinská univerzita v iline Diplomová prácaKatedra telekomunikácií––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––
________________________________________________________________________
23
2.3 Porovnanie základných vlastností automobilových zberníc
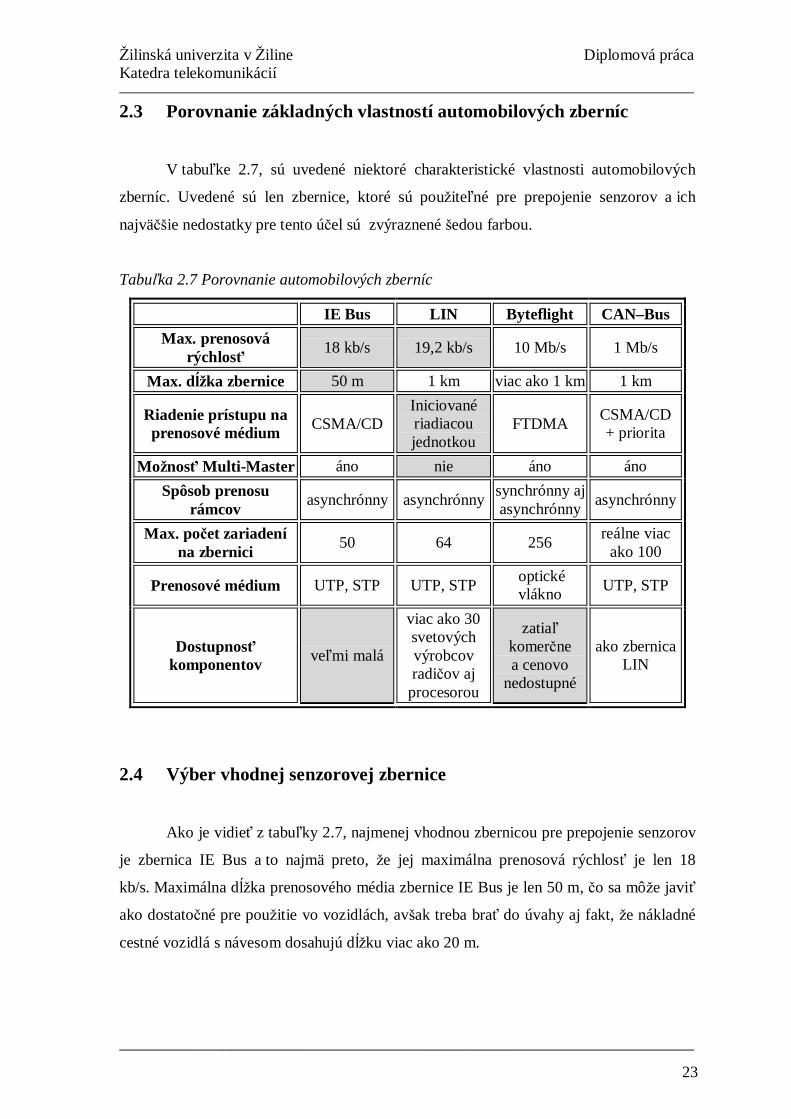
V tabu ke 2.7, sú uvedené niektoré charakteristické vlastnosti automobilových
zberníc. Uvedené sú len zbernice, ktoré sú pou ite né pre prepojenie senzorov a ich
najvä ie nedostatky pre tento ú el sú zvýraznené edou farbou.
Tabu ka 2.7 Porovnanie automobilových zberníc
IE Bus LIN Byteflight CAN–BusMax. prenosová
rýchlos 18 kb/s 19,2 kb/s 10 Mb/s 1 Mb/s
Max. d ka zbernice 50 m 1 km viac ako 1 km 1 km
Riadenie prístupu naprenosové médium CSMA/CD
Iniciovanériadiacoujednotkou
FTDMA CSMA/CD+ priorita
Mo nos Multi-Master áno nie áno ánoSpôsob prenosu
rámcov asynchrónny asynchrónny synchrónny ajasynchrónny asynchrónny
Max. po et zariadenína zbernici 50 64 256 reálne viac
ako 100
Prenosové médium UTP, STP UTP, STP optickévlákno UTP, STP
Dostupnoskomponentov ve mi malá
viac ako 30svetovýchvýrobcovradi ov aj
procesorou
zatiakomer nea cenovo
nedostupné
ako zbernicaLIN
2.4 Výber vhodnej senzorovej zbernice
Ako je vidie z tabu ky 2.7, najmenej vhodnou zbernicou pre prepojenie senzorov
je zbernica IE Bus a to najmä preto, e jej maximálna prenosová rýchlos je len 18
kb/s. Maximálna d ka prenosového média zbernice IE Bus je len 50 m, o sa mô e javi
ako dostato né pre pou itie vo vozidlách, av ak treba bra do úvahy aj fakt, e nákladné
cestné vozidlá s návesom dosahujú d ku viac ako 20 m.
ilinská univerzita v iline Diplomová prácaKatedra telekomunikácií––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––
________________________________________________________________________
24
Tie musíme ráta s rôznymi kon truk nými obmedzeniami pri kabelá i (nie je
dy mo né uklada kabelá najkrat ou mo nou cestou), z oho vyplýva, e pri pou ití
zbernice IE Bus by nebolo mo né rozlo senzory po oboch stranách celého vozidla.
al ím záva ným nedostatkom zbernice IE Bus je malá dostupnos komponentov a to
najmä z dôvodu malého záujmu výrobcov automobilov o túto zbernicu. al ou
pou ite nou zbernicou pre prepojenie senzorov je zbernica LIN, ktorá bola na tento ú el
priamo vyvinutá. Jej maximálna prenosová rýchlos 19,2 kb/s je podobne ako u zbernice
IE Bus jedným z jej nedostatkov. No najvä ím nedostatkom zbernice LIN je spôsob
riadenia prístupu na prenosové médium. Komunikáciu v dy iniciuje riadiaca jednotka
vyslaním rámca Master, ktorý obsahuje adresné pole s adresou jedného s pripojených
podriadených zariadení. Adresované podriadené zariadenie odpovedá riadiacej jednotke
vyslaním rámca Slave. Po as tejto komunikácie ostatné uzly pripojené na zbernicu
nevysielajú. A práve tento spôsob komunikácie nie je pre nami rie enú aplikáciu
bezpe ný, preto e v prípade poplachového stavu ubovolného zo senzorov nemô e tento
senzor poplachový stav okam ite hlási riadiacej jednotke, ale musí aka kým ho
riadiaca jednotka „osloví“. Jednou s najvhodnej ích posudzovaných zberníc je
bezpochyby zbernica Byteflight. Zbernica Byteflight patrí medzi najmodernej ie a
najbezpe nej ie automobilové zbernice. Kombinuje v etky výhody synchrónneho
a asynchrónneho prenosu dát a s pou itím plastického optického vlákna ako prenosového
média sa stáva najspo ahlivej ou a najbezpe nej ou doteraz vyvinutou automobilovou
zbernicou. Podrobný popis zbernice Byteflight je uvedený v kapitole 2.3.7. Jediným jej
nedostatkom je dostupnos komponentov na jej realizáciu a ich cena.
Nielen z uvedených dôvodov, ale najmä pre jej spo ahlivos , vysokú prenosovú
rýchlos , jednoduchú roz íritelnos a dostupnos komponentov je vybranou zbernicou
pre pripojenie senzorov zbernica CAN-Bus. K jej konkurencie schopnosti napomáha aj
vynikajúci pomer cena/výkon. Obrovskou výhodou CAN je to, e umo uje komunikáciu
medzi rôznymi výrobkami od rôznych výrobcov.
ilinská univerzita v iline Diplomová prácaKatedra telekomunikácií––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––
________________________________________________________________________
25
3 Senzory
3.1 Definícia senzora
Senzor je funk ný prvok tvoriaci vstupný blok meracieho re azca, ktorý je
v priamom styku s meraným prostredím. Pojem senzor je ekvivalentný pojmu sníma
alebo detektor. Citlivá as senzoru sa ozna uje ako sníma . Senzor ako primárny zdroj
informácie sníma sledovanú fyzikálnu, chemickú alebo biologickú veli inu a pod a
ur itého definovaného princípu ju transformuje na meraciu veli inu – naj astej ie na
veli inu elektrickú. alej existujú senzory, ktoré transformujú meranú neelektrickú
veli inu priamo na íslicový signál.
Senzory ako zdroje primárnych informácií o reálnom svete sú k ovým
elementom prakticky v etkých regula ných a meracích systémov. Výber senzorov
zásadne predur uje koncepciu celého systému a významne podmie uje úspech rie enia
úlohy. Variabilita po iadaviek praxe vy aduje vývoj a kon trukciu nových typov
senzorov a odsúva do pozadia star ie genera né rady. 1
3.2 Základné rozdelenie senzorov
Rozdelenie pod a meranej veli iny:
Senzory tlaku, teploty, prietoku, radia ných veli ín vo vidite nom, infra ervenom
a inom spektre, mechanických veli ín (posunutie, polohy, rýchlosti, zrýchlenia, sily,
mechanického napätia a iné), senzory pre analýzu látok, kvapalín a plynov, senzory
elektrických a magnetických veli ín a pod.
Rozdelenie pod a fyzikálneho princípu:
Senzory odporové, induk nostné, induk né, kapacitné, magnetické,
piezoelektrické, pyroelektrické, optoelektronické, optické vláknové, chemické, biologické
a iné.
1 o S., Kreidl M.: Senzory a m ící obvody, 1996
ilinská univerzita v iline Diplomová prácaKatedra telekomunikácií––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––
________________________________________________________________________
26
Rozdelenie pod a styku senzora s meraným prostredím:
Bezdotykové, dotykové
Rozdelenie pod a transformácie signálu:
Aktívne, pasívne
Rozdelenie pod a výrobnej technológie:
Elektromechanické, mechanické, pneumatické, elektrické, elektronické,
elektrochemické, polovodi ové, mikroelektronické, optoelektronické a iné.
alej mo no senzory rozdeli pod a spôsobu pou itia, ú elu, ur enia a pod.
Uvedené rozdelenie senzorov je v eobecné a slú i k lep ej orientácií v oblasti senzorovej
techniky a pomáha rie ite om vybra o najvhodnej í sníma pre danú úlohu.
3.3 Merací re azec
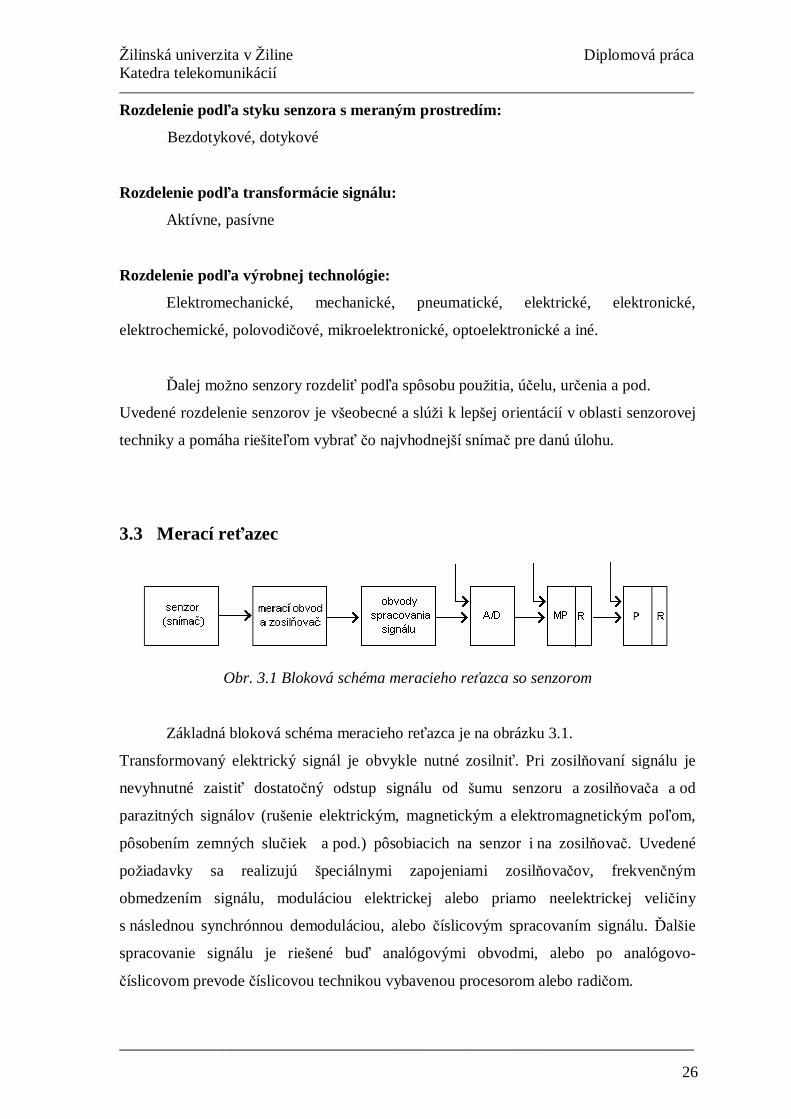
Obr. 3.1 Bloková schéma meracieho re azca so senzorom
Základná bloková schéma meracieho re azca je na obrázku 3.1.
Transformovaný elektrický signál je obvykle nutné zosilni . Pri zosil ovaní signálu je
nevyhnutné zaisti dostato ný odstup signálu od umu senzoru a zosil ova a a od
parazitných signálov (ru enie elektrickým, magnetickým a elektromagnetickým po om,
pôsobením zemných slu iek a pod.) pôsobiacich na senzor i na zosil ova . Uvedené
po iadavky sa realizujú peciálnymi zapojeniami zosil ova ov, frekven ným
obmedzením signálu, moduláciou elektrickej alebo priamo neelektrickej veli iny
s následnou synchrónnou demoduláciou, alebo íslicovým spracovaním signálu. al ie
spracovanie signálu je rie ené bu analógovými obvodmi, alebo po analógovo-
íslicovom prevode íslicovou technikou vybavenou procesorom alebo radi om.
ilinská univerzita v iline Diplomová prácaKatedra telekomunikácií––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––
________________________________________________________________________
27
Analógový výstup meracieho re azca je v najjednoduch om prípade realizovaný
priamo ukazujúcim prístrojom, alebo pre prenos dát blokom unifikácie signálu,
modulátorom, prípadne optoelektronickým lenom pre prenos modulovaného signálu
svetlovodom a pod. Pri íslicovom spracovaní signálu je výstup tvorený bu íslicovým
meracím prístrojom vybaveným rozhraním pre dia kové spracovávanie dát, alebo priamo
rozhraním (tj. spolo nou hranicou s definovanými charakteristikami fyzického,
signálového, funk ného a procedurálneho prepojenia). V senzorovej technike sa
naj astej ie pou íva sérové rozhranie (tj. sérový prenos dát) a to najmä rozhranie RS-232-
C a RS485. Sú as ou ka dého rozhrania je komunika ný protokol definujúci prenos
nameraných dát, adries, riadiacich a stavových signálov. peciálne zbernice ( napr.
ProfiBUS, CAN-Bus, ABUS a iné) sú pou ívané najmä automobilovom priemysle.
3.4 Inteligencia senzorov
Inteligenciu senzorov budeme rozumie schopnos senzora, poskytnú nielen
informáciu o meranej veli ine ale aj o stave vlastnej funk nosti a presnosti hodnoty
meranej veli iny nadriadenému zariadeniu a tie schopnos prijíma pokyny od
nadriadeného zariadenia komunika nou zbernicou.
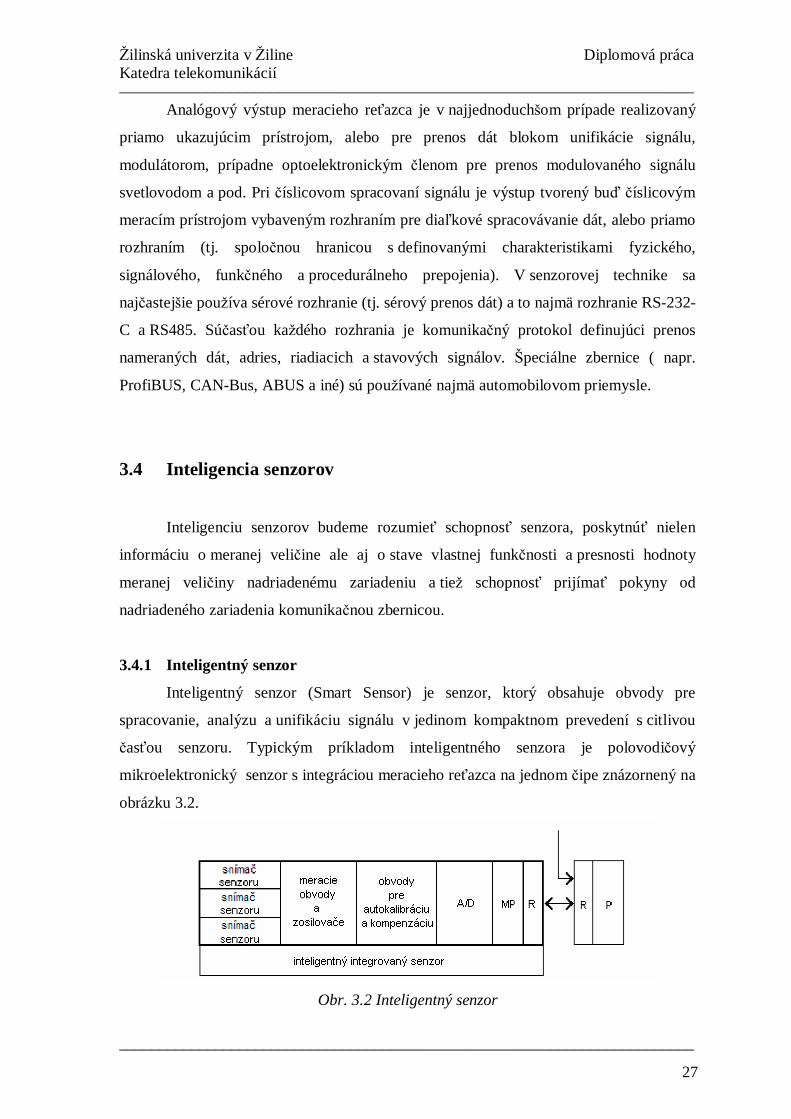
3.4.1 Inteligentný senzor
Inteligentný senzor (Smart Sensor) je senzor, ktorý obsahuje obvody pre
spracovanie, analýzu a unifikáciu signálu v jedinom kompaktnom prevedení s citlivou
as ou senzoru. Typickým príkladom inteligentného senzora je polovodi ový
mikroelektronický senzor s integráciou meracieho re azca na jednom ipe znázornený na
obrázku 3.2.
Obr. 3.2 Inteligentný senzor
ilinská univerzita v iline Diplomová prácaKatedra telekomunikácií––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––
________________________________________________________________________
28
Inteligencia senzoru je definovaná ka dým výrobcom odli ne. Inteligentným
senzorom mô eme teda ozna ova aj taký senzor, ktorého citlivá as (sníma ) je
z technologických dôvodov oddelená od mikroelektronickej integrovanej asti, pokia je
vzdialenos sníma a od elektroniky minimálna a z h adiska výmeny senzoru bude senzor
tvori mechanicky, elektricky a funk ne jediný uzavretý celok. Sníma s as ou
elektronických obvodov mô e by s íslicovou as ou senzoru prepojené optickým
vláknom. Uvedená situácia nastane napr. vtedy ak je sníma senzoru vystavený
extrémnym podmienkam (teplota, tlak, agresivita), alebo nie je mo né sníma vyrobi
mikroelektronickou technológiou. Ak rozdelíme truktúru inteligentného senzoru na
vstupnú, vnútornú a výstupnú as , mô eme definova po iadavky na inteligenciu takto:
1. vstupná as : prevod meranej veli iny na elektrickú, zosilnenie a filtrácia
signálu, linearizácia statickej charakteristiky, normovanie signálu, prepínanie
viacero vstupných veli ín, ochrana proti ne iadúcemu pôsobeniu parazitných
veli ín a pod.
2. vnútorná as : analógovo- íslicový prevod, autokalibrácia elektrickej a pokia je
to mo né i neelektrickej asti meracieho re azca, íslicová linearizácia,
aritmetické operácie, autodiagnostika, tatistické vyhodnocovanie meraných dát
(stredná hodnota, smerodatná odchýlka a pod.), prostredníctvom rozhrania
dia kovo ovládané rozsahy (respektíve zosilnenie), registrácia medzivýsledkov a
po umelú inteligenciu, kedy senzor na základe modelu a u iacich sa princípov je
schopný napr. rozozna , i sú namerané dáta dôveryhodné a pod.
3. výstupná as : unifikácia analógových výstupných signálov, komunikácia
prostredníctvom integrovaného rozhrania so zbernicovým systémom, íslicovo
analógový prevod a pod.

ilinská univerzita v iline Diplomová prácaKatedra telekomunikácií––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––
________________________________________________________________________
29
3.4.2 Rozdelenie senzorov pod a inteligencie
Pod a inteligencie mô eme senzory rozdelil na:
1. Senzory bez vlastnej inteligencie ( v al om texte ozna ované ako senzory NIQ )
2. Senzory s nízkou inteligenciou (v al om texte ozna ované ako senzory LIQ )
3. Senzory s vysokou inteligenciou (v al om texte ozna ované ako senzory HIQ )
Obr. 3.3 Logická truktúra inteligencie senzora pod a integrovaných funk ných blokov
Zna ná as be ných senzorov bez inteligencie (NIQ) alebo s nízkou inteligenciou
(LIQ) sa pri automatizovanom spracovávaní dát pripojuje prostredníctvom tzv.
inteligentného senzorového modulu. Tieto moduly vytvárajú pri prepojení senzorov
NIQ a LIQ funk ný ekvivalent inteligentných senzorov HIQ na najvy ej úrovni.
Inteligentné senzorové moduly majú spravidla viacero prepínate ných vstupov,
programovate né zosilnenie a sú vybavené komunika ným rozhraním.

ilinská univerzita v iline Diplomová prácaKatedra telekomunikácií––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––
________________________________________________________________________
30
3.5 Automatizované spracovávanie dát v senzorovej technike
Architektúra meracích re azcov od najjednoduch ích senzorov po najdokonalej ie
musí sp po iadavku spo ahlivého prenosu dát pre hierarchické spracovanie dát.
Obr. 3.4 Centralizovaný systém pripojenia senzorov a meracích re azcov
Nevýhodou usporiadania znázorneného na obrázku 3.4 je jednosmerný tok
informácie, nemo nos signály vopred spracova , nastavova parametre senzorov
a podobne.
Medzinárodným trendom je digitalizova signál bu priamo v inteligentnom
senzore, alebo v inteligentnom module a prenos dát realizova prostredníctvom
tandardizovaných obojsmerných rozhraní (obrázok 3.5).
Obr. 3.5 Decentralizovaná truktúra s distribuovanou inteligenciou
(IS- inteligentný senzor, P- po íta )

ilinská univerzita v iline Diplomová prácaKatedra telekomunikácií––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––
________________________________________________________________________
31
Prepojenie inteligentných senzorov cez obojsmerné rozhranie umo uje
usporiadanie decentralizovaného systému s distribuovanou inteligenciou t.j. usporiadanie
so vzájomnou komunikáciou medzi v etkými lenmi pripojenými k zbernici.
3.6 Technické parametre senzorov
Technické parametre senzorov sú uverejnené v katalógu výrobcu, ktorý garantuje
tieto parametre. Typické parametre charakterizujúce základné statické a dynamické
vlastnosti senzorov mo no zhrnú do nasledujúceho preh adu:
statické parametre
a) citlivos
b) prah citlivosti
c) dynamický rozsah
d) reprodukovate nos
e) rozlí ite nos
f) aditívne a multiplikatívne chyby
g) linearita
h) parametre výstupu
dynamické parametre
a) parametre asovej odozvy
b) asová kon tanta
c) írka frekven ného pásma
d) frekven ný rozsah
e) rýchlos íslicového prenosu
f) parametre umu
Poznámka: Tieto základné statické a dynamické vlastnosti sú definované presnými
matematickými vz ahmi a predpismi na ich meranie. Táto problematika je podrobne
popísaná v [1].

ilinská univerzita v iline Diplomová prácaKatedra telekomunikácií––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––
________________________________________________________________________
32
3.7 Preh ad a rozdelenie senzorov vhodných na pou itie v cestných
vozidlách
Na úvod je treba si uvedomi , e elektronika pou ívaná v cestných vozidlách musí
sp najprísnej ie kritériá z h adiska bezpe nosti. Bezporuchová innos v etkých
elektronických zariadení bezpe nostnej výbavy automobilu musí by zaru ená v rozsahu
pracovných teplôt od – 40°C do + 125°C. alej musí by odolná vo i rôznym typom
mechanických otrasov, vlhkosti, pra nosti a vplyvu agresívnych látok pou ívaných
v automobiloch. Tieto zlo ité pracovné podmienky kladú vysoké nároky aj na senzory
a sníma e fyzikálnych veli ín pou ívané v automobiloch. Preto musíme pri výbere
vhodných senzorov bra do úvahy nielen statické a dynamické vlastnosti senzora ale
najmä schopnos spo ahlivo fungova v týchto podmienkach. alej je treba bra do
úvahy legislatívne po iadavky na prepravu rôznych druhov nákladu a pod a platných
predpisov zabezpe potrebné opatrenia a merania vlastností prepravovaného nákladu
(úniky jedovatých a výbu ných látok, kodlivé iarenia a pod.). Touto problematikou sa
zaoberá Európska dohoda o medzinárodnej cestnej preprave nebezpe ných vecí
(nazývaná ADR) platná od 1. januára 2005 a záväzná pre v etky lenské táty EÚ. Jej
plné znenie je mo né si stiahnu z internetovej stránky Ministerstva dopravy pô t
a telekomunikácií Slovenskej republiky [13].
Prudký rozvoj cestnej dopravy kladie vysoké nároky nielen na bezpe nostné prvky
vozidla ale aj na bezpe nos prepravovaného nákladu a posádky. al í stupe zvý enia
bezpe nosti cestnej dopravy je mo nos nepretr ite monitorova a lokalizova vozidlá
prepravujúce cenný alebo nebezpe ný náklad pomocou lokaliza ných slu ieb pozemných
alebo satelitných rádiokomunika ných systémov.
Na splnenie uvedených cie ov je nutné pou senzory, rozdelené do troch kategórií:
1. Senzory monitorujúce stav vozidla - Do tejto kategórie patria senzory, ktoré
monitorujú dôle ité funkcie vozidla a informujú o stave meranej sústavy centrálnu
po íta ovú jednotku.

ilinská univerzita v iline Diplomová prácaKatedra telekomunikácií––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––
________________________________________________________________________
33
2. Senzory monitorujúce náklad – Sem patria senzory, ktoré sledujú dôle ité
vlastnosti nákladu z h adiska bezpe nosti (nebezpe né výpary, úrove kodlivého
iarenia a pod.). Konkrétne typy budú závisie od prepravovaného nákladu
a po iadaviek ADR.
3. Senzory pre identifikáciu a kontrolu stavu posádky – Táto kategória senzorov je
odli ná od predchádzajúcich dvoch kategórií a to najmä v tom, e ide o senzory
ktoré snímajú a sledujú správanie ivého organizmu ( loveka) a rozhodujú
o oprávnenosti a spôsobilosti konkrétneho jedinca manipulova s vozidlom
a nákladom.
Poznámka: Jeden a ten istý senzor (napr. senzor teploty) mô e by zaradený do ka dej
z horeuvedených kategórií. Zále í na jeho konkrétnom pou ití.
3.7.1 Senzory monitorujúce stav vozidla
Táto kategória v sebe zah a aj senzory, ktoré sa do vozidla montujú u pri jeho
výrobe, a sú sú as ou pôvodného senzorového systému ka dého moderného vozidla
(osobného aj nákladného). Ich pou itie je nevyhnutné pre správne fungovanie vozidla
a sú primárnymi zdrojmi informácií pre palubní po íta . Ich po et závisí najmä od triedy
vozidla a roku výroby.
Obr. 3.6 Základné funkcie realizované pou itím senzorov pôvodnej senzorovej siete
V sú asnosti vyrábané vozidlá v etkých tried pou ívajú senzory, pomocou ktorých
doká u realizova minimálne funkcie nazna ené na obrázku 3.6. Komunikácia s riadiacou
jednotkou je realizovaná preva ne zbernicou CAN.
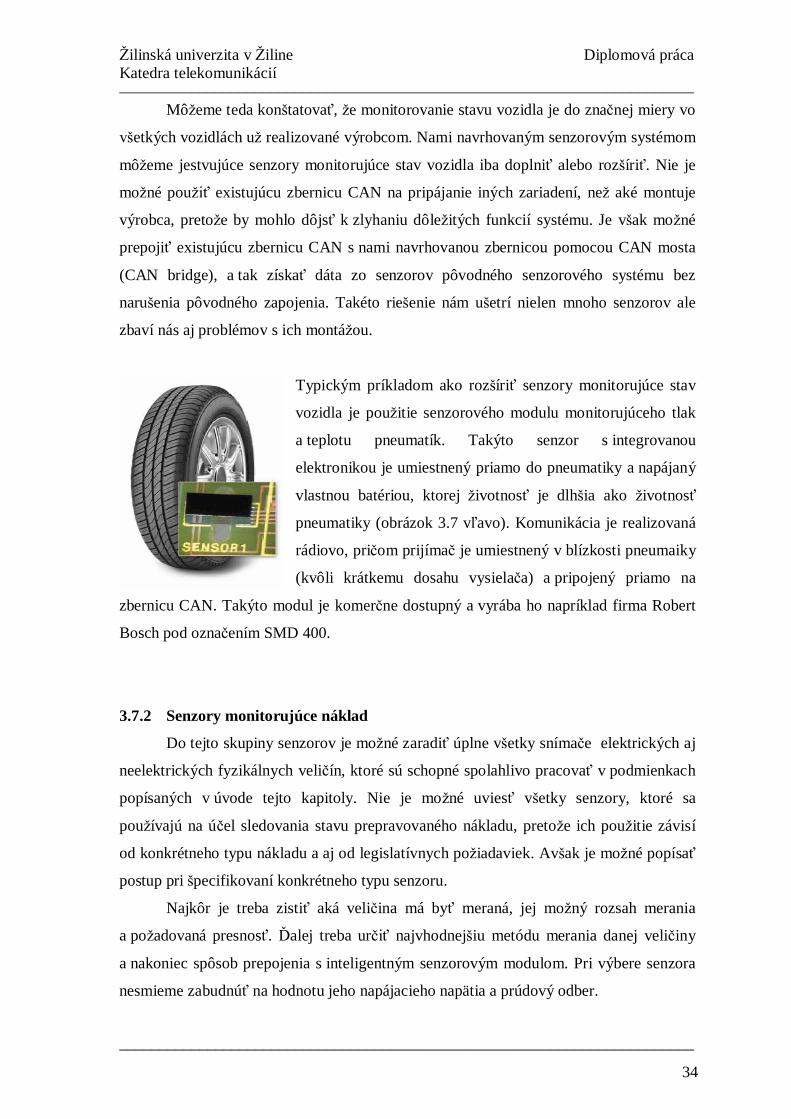
ilinská univerzita v iline Diplomová prácaKatedra telekomunikácií––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––
________________________________________________________________________
34
Mô eme teda kon tatova , e monitorovanie stavu vozidla je do zna nej miery vo
etkých vozidlách u realizované výrobcom. Nami navrhovaným senzorovým systémom
mô eme jestvujúce senzory monitorujúce stav vozidla iba doplni alebo roz íri . Nie je
mo né pou existujúcu zbernicu CAN na pripájanie iných zariadení, ne aké montuje
výrobca, preto e by mohlo dôjs k zlyhaniu dôle itých funkcií systému. Je v ak mo né
prepoji existujúcu zbernicu CAN s nami navrhovanou zbernicou pomocou CAN mosta
(CAN bridge), a tak získa dáta zo senzorov pôvodného senzorového systému bez
naru enia pôvodného zapojenia. Takéto rie enie nám u etrí nielen mnoho senzorov ale
zbaví nás aj problémov s ich montá ou.
Typickým príkladom ako roz íri senzory monitorujúce stav
vozidla je pou itie senzorového modulu monitorujúceho tlak
a teplotu pneumatík. Takýto senzor s integrovanou
elektronikou je umiestnený priamo do pneumatiky a napájaný
vlastnou batériou, ktorej ivotnos je dlh ia ako ivotnos
pneumatiky (obrázok 3.7 v avo). Komunikácia je realizovaná
rádiovo, pri om prijíma je umiestnený v blízkosti pneumaiky
(kvôli krátkemu dosahu vysiela a) a pripojený priamo na
zbernicu CAN. Takýto modul je komer ne dostupný a vyrába ho napríklad firma Robert
Bosch pod ozna ením SMD 400.
3.7.2 Senzory monitorujúce náklad
Do tejto skupiny senzorov je mo né zaradi úplne v etky sníma e elektrických aj
neelektrických fyzikálnych veli ín, ktoré sú schopné spolahlivo pracova v podmienkach
popísaných v úvode tejto kapitoly. Nie je mo né uvies v etky senzory, ktoré sa
pou ívajú na ú el sledovania stavu prepravovaného nákladu, preto e ich pou itie závisí
od konkrétneho typu nákladu a aj od legislatívnych po iadaviek. Av ak je mo né popísa
postup pri pecifikovaní konkrétneho typu senzoru.
Najkôr je treba zisti aká veli ina má by meraná, jej mo ný rozsah merania
a po adovaná presnos . alej treba ur najvhodnej iu metódu merania danej veli iny
a nakoniec spôsob prepojenia s inteligentným senzorovým modulom. Pri výbere senzora
nesmieme zabudnú na hodnotu jeho napájacieho napätia a prúdový odber.

ilinská univerzita v iline Diplomová prácaKatedra telekomunikácií––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––
________________________________________________________________________
35
Hodnota napájacieho napätia by nemala presiahnu +12V a prúdový odber 100
mA (preto e na napájanie uzlov zbernice bude pou itý napájací zdroj s maximálnym
napätím +12V popísaný v kapitole 5.6). Preh ad senzorov vhodných na monitorovanie
nákladu je uvedený v prílohe íslo 2.
3.7.3 Senzory pre identifikáciu a kontrolu stavu posádky
Senzory na identifikáciu posádky vyu ívajú metódy na identifikáciu osôb.
Existujú rôzne metódy identifikácie osôb, ktoré je vo v eobecnosti mo né rozdeli do
dvoch skupín:
1. Nebiometrické metódy identifikácie – Tieto metódy identifikácie vyu ívajú
ulo ené informácie, ktorými sa daný u ívate preukazuje. Do tejto kategórie
zara ujeme identifikáciu:
- zadaním hesla alebo íselného kódu
- karty s magnetickým pruhom
- ipové kontaktné a bezkontaktné karty
2. Biometrické metódy identifikácie – Tieto metódy vyu ívajú jedine né fyzikálne
vlastnosti udských bytostí ako prostriedok na identifikáciu. Táto kategória zah a
pä základných typov biometrických technológií :
- snímanie otla ku dlane alebo prstu
- optické snímanie sietnice alebo dúhovky oka
- snímanie tváre
- rozpoznávanie hlasového profilu
- overovanie podpisu
ilinská univerzita v iline Diplomová prácaKatedra telekomunikácií––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––
________________________________________________________________________
36
Kontrola stavu posádky po as jazdy mô e by realizovaná rôznymi spôsobmi,
ktoré sa od seba lí ia najmä v tom, i posádku tvorí jeden lovek alebo viac udí. Medzi
najbe nej ie metódy kontroly stavu posádky patria:
- tla idlo bdelosti
- snímanie dotyku rúk vodi a s volantom
- volania z doh adového centra
- monitorovanie srdcového pulzu vodi a
Po preskúmaní v etkých dostupných technológií pre identifikáciu osôb sa ako
najvhodnej ia metóda identifikácie posádky javí metóda snímania otla ku prstu. Táto
biometrická metóda je vysoko spo ahlivá a v sú asnosti aj cenovo výhodná. Ke e vodi
vozidla bude musie by vybavený USB Flash diskom, ve mi vhodným rie ením je
pou USB Flash disk so vstavaným sníma om otla ku prstu. Takéto disky vyrába
napríklad spolo nos PRETEC pod ozna ením i-Disk Touch.
PRETEC i-Disk Touch je univerzálny biometrický bezpe nostný USB disk
vyvinutý pre ukladanie zdie anie a prenos dát. Systém snímania otla ku prstu umo uje
kódovanie/dekódovanie súborov, bezpe ný a rýchly prístup k palubnému po íta u a
mnoho al ích bezpe nostných aplikácií. Zabezpe enie otla kom prstu umo uje prístup
k dátam iba autorizovaným u ívate om (maximálne 10-tim).
Obr. 3.8 PRETEC i-Disk Touch
ilinská univerzita v iline Diplomová prácaKatedra telekomunikácií––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––
________________________________________________________________________
37
Vlastnosti USB Flash disku PRETEC i-Disk Touch:
– USB 2.0 rozhranie
– Kapacita disku: 265MB a 4GB
– Senzor otla ku prstu: otla ok sa naskenuje ahaním prstu cez senzor
– Skenovací priestor: 9,6 x 0,8 mm
– Pravdepodobnos akceptovania nesprávneho otla ku < 0,001%
– Pravdepodobnos odmietnutia autorizovaného otla ku < 1,0% (v prípade
odmietnutia otla ku, je mo né pou zadané heslo)
– Nie je nutné externé napájanie
– Rozmery: 76,4 x 19,4 x 10,2 mm
– Hmotnos : 10g
al ím dostupným rie ením snímania otla ku prstu je pou itie samostatného
sníma a pripojeného ku USB portu centrálnej po íta ovej jednotky vozidla káblom.
Takýto senzor ponúka napríklad spolo nos American Power Conversion pod ozna ením
APC Biometric Password Manager (obrázok 3.9).
Obr. 3.9 APC Biometric Password Manager
Rie enie vychádza zo pi kovej patentovanej technológie na snímanie otla kov
prstov TruePrint. Táto technológia sníma otla ok prstu pod povrchom ko e na „ ivej
vrstve“ teda na skuto nom otla ku prstu. Na TruePrint preto nemá vplyv be ný stav
povrchu ko e, vrátane suchej, odretej, stvrdnutej, pinavej alebo mastnej ko e, ktorý u
iných senzorov mô e ovplyvni schopnos získa presný otla ok prstu pre identifikáciu
ívate a. TruePrint je zatia jediná technológia pre snímanie otla kov prstov, ktorá
doká e zosníma otla ok kohoko vek prakticky za akýchko vek podmienok.
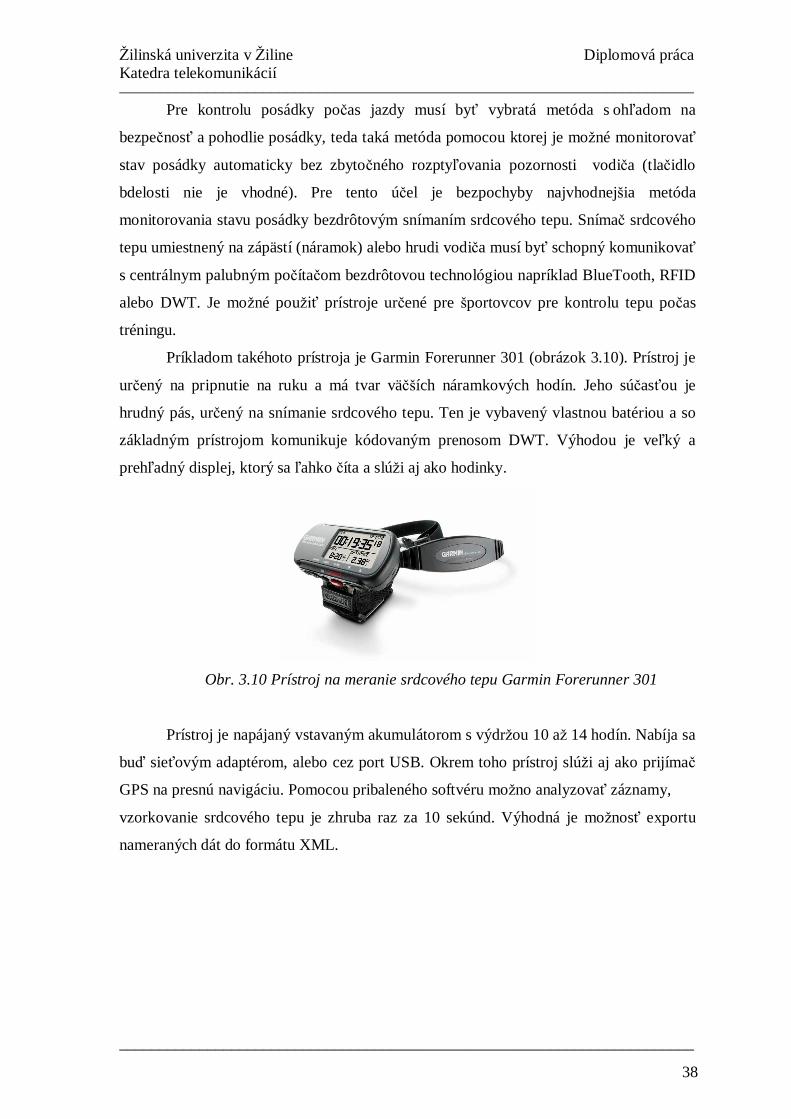
ilinská univerzita v iline Diplomová prácaKatedra telekomunikácií––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––
________________________________________________________________________
38
Pre kontrolu posádky po as jazdy musí by vybratá metóda s oh adom na
bezpe nos a pohodlie posádky, teda taká metóda pomocou ktorej je mo né monitorova
stav posádky automaticky bez zbyto ného rozpty ovania pozornosti vodi a (tla idlo
bdelosti nie je vhodné). Pre tento ú el je bezpochyby najvhodnej ia metóda
monitorovania stavu posádky bezdrôtovým snímaním srdcového tepu. Sníma srdcového
tepu umiestnený na zápästí (náramok) alebo hrudi vodi a musí by schopný komunikova
s centrálnym palubným po íta om bezdrôtovou technológiou napríklad BlueTooth, RFID
alebo DWT. Je mo né pou prístroje ur ené pre portovcov pre kontrolu tepu po as
tréningu.
Príkladom takéhoto prístroja je Garmin Forerunner 301 (obrázok 3.10). Prístroj je
ur ený na pripnutie na ruku a má tvar vä ích náramkových hodín. Jeho sú as ou je
hrudný pás, ur ený na snímanie srdcového tepu. Ten je vybavený vlastnou batériou a so
základným prístrojom komunikuje kódovaným prenosom DWT. Výhodou je ve ký a
preh adný displej, ktorý sa ahko íta a slú i aj ako hodinky.
Obr. 3.10 Prístroj na meranie srdcového tepu Garmin Forerunner 301
Prístroj je napájaný vstavaným akumulátorom s výdr ou 10 a 14 hodín. Nabíja sa
bu sie ovým adaptérom, alebo cez port USB. Okrem toho prístroj slú i aj ako prijíma
GPS na presnú navigáciu. Pomocou pribaleného softvéru mo no analyzova záznamy,
vzorkovanie srdcového tepu je zhruba raz za 10 sekúnd. Výhodná je mo nos exportu
nameraných dát do formátu XML.

ilinská univerzita v iline Diplomová prácaKatedra telekomunikácií––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––
________________________________________________________________________
39
Obr. 3.11 Prenos údajov medzi Forerunner 301 a PC
Aj ke je prístroj Garmin Forerunner 301 ur ený na úplne inú funkciu
(monitoring tréningu portovca), je mo né ho pou aj do aplikácie sledovania stavu
posádky, preto e disponuje USB rozhraním a doká e bezdrôtovo sníma srde ný tep.
Naviac mô e posádke slú aj ako hodinky a dokonca GPS navigácia.
4 Definovanie rozhrania medzi senzorom a zbernicou
4.1 Inteligentný senzorový modul
Ako u bolo uvedené v kapitole 3.4, inteligentný senzorový modul je elektronický
blok, ktorý slú i na pripojenie senzorov bez inteligencie (NIQ) alebo s nízkou
inteligenciou (LIQ) na komunika nú zbernicu, ím vytvára funk ný ekvivalent
inteligentných senzorov HIQ na najvy ej úrovni. Inteligentné senzorové moduly majú
spravidla viacero prepínate ných vstupov, programovate né zosilnenie a sú vybavené
komunika ným rozhraním.
4.2 Návrh inteligentného senzorového modulu pre zbernicu CAN Bus
Úlohou takéhoto modulu je pripojenie ubovolného senzora, sníma a prípadne
spína a ku komunika nej zbernici CAN Bus. Jeho bloková truktúra je na obrázku 4.1.
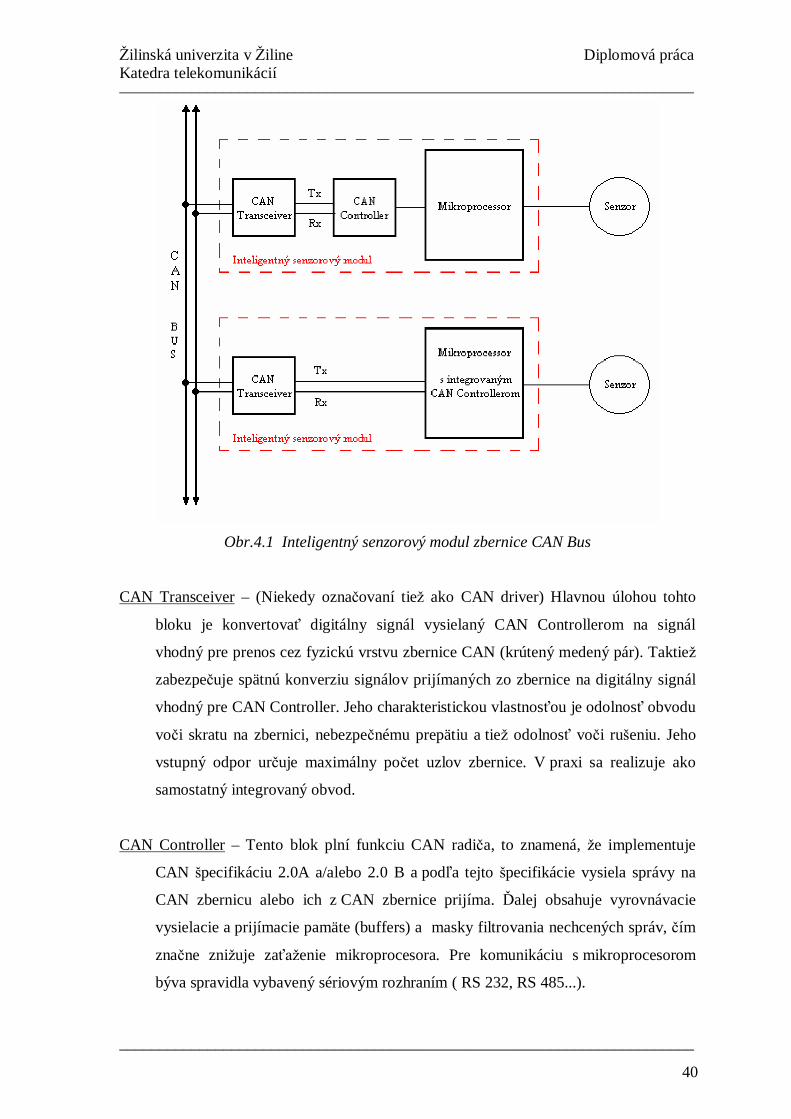
ilinská univerzita v iline Diplomová prácaKatedra telekomunikácií––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––
________________________________________________________________________
40
Obr.4.1 Inteligentný senzorový modul zbernice CAN Bus
CAN Transceiver – (Niekedy ozna ovaní tie ako CAN driver) Hlavnou úlohou tohto
bloku je konvertova digitálny signál vysielaný CAN Controllerom na signál
vhodný pre prenos cez fyzickú vrstvu zbernice CAN (krútený medený pár). Taktie
zabezpe uje spätnú konverziu signálov prijímaných zo zbernice na digitálny signál
vhodný pre CAN Controller. Jeho charakteristickou vlastnos ou je odolnos obvodu
vo i skratu na zbernici, nebezpe nému prepätiu a tie odolnos vo i ru eniu. Jeho
vstupný odpor ur uje maximálny po et uzlov zbernice. V praxi sa realizuje ako
samostatný integrovaný obvod.
CAN Controller – Tento blok plní funkciu CAN radi a, to znamená, e implementuje
CAN pecifikáciu 2.0A a/alebo 2.0 B a pod a tejto pecifikácie vysiela správy na
CAN zbernicu alebo ich z CAN zbernice prijíma. alej obsahuje vyrovnávacie
vysielacie a prijímacie pamäte (buffers) a masky filtrovania nechcených správ, ím
zna ne zni uje za enie mikroprocesora. Pre komunikáciu s mikroprocesorom
býva spravidla vybavený sériovým rozhraním ( RS 232, RS 485...).
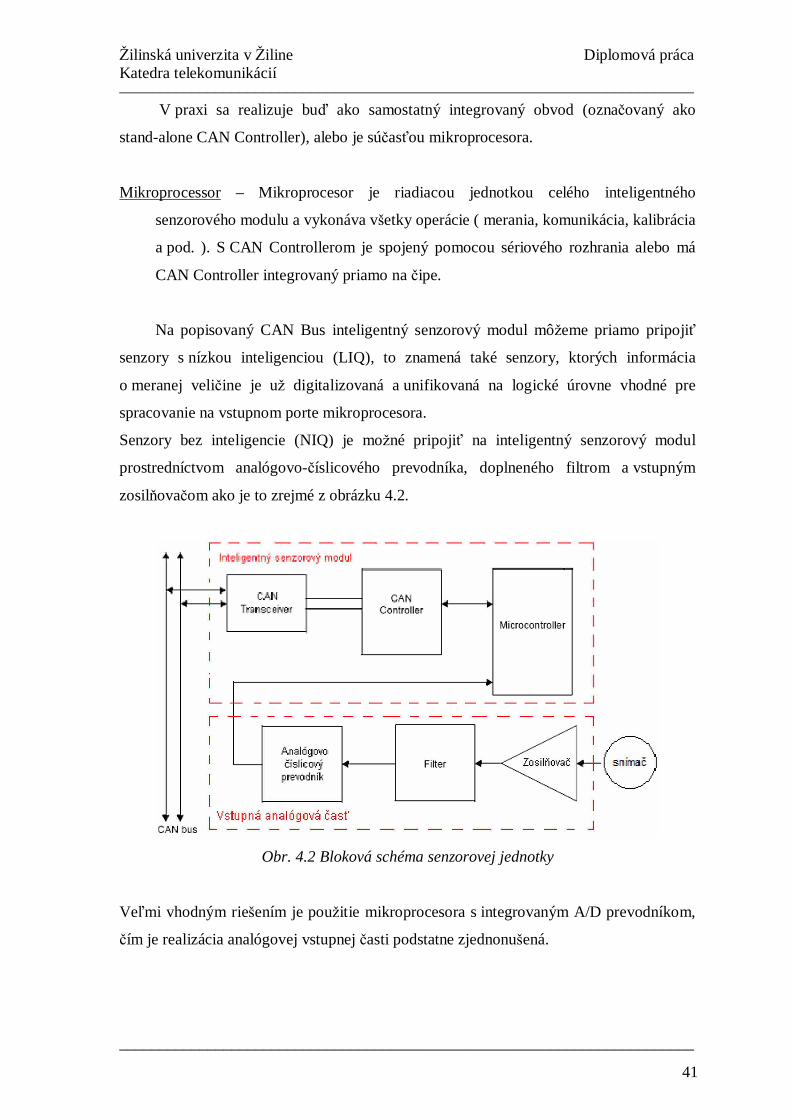
ilinská univerzita v iline Diplomová prácaKatedra telekomunikácií––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––
________________________________________________________________________
41
V praxi sa realizuje bu ako samostatný integrovaný obvod (ozna ovaný ako
stand-alone CAN Controller), alebo je sú as ou mikroprocesora.
Mikroprocessor – Mikroprocesor je riadiacou jednotkou celého inteligentného
senzorového modulu a vykonáva v etky operácie ( merania, komunikácia, kalibrácia
a pod. ). S CAN Controllerom je spojený pomocou sériového rozhrania alebo má
CAN Controller integrovaný priamo na ipe.
Na popisovaný CAN Bus inteligentný senzorový modul mô eme priamo pripoji
senzory s nízkou inteligenciou (LIQ), to znamená také senzory, ktorých informácia
o meranej veli ine je u digitalizovaná a unifikovaná na logické úrovne vhodné pre
spracovanie na vstupnom porte mikroprocesora.
Senzory bez inteligencie (NIQ) je mo né pripoji na inteligentný senzorový modul
prostredníctvom analógovo- íslicového prevodníka, doplneného filtrom a vstupným
zosil ova om ako je to zrejmé z obrázku 4.2.
Obr. 4.2 Bloková schéma senzorovej jednotky
Ve mi vhodným rie ením je pou itie mikroprocesora s integrovaným A/D prevodníkom,
ím je realizácia analógovej vstupnej asti podstatne zjednonu ená.
ilinská univerzita v iline Diplomová prácaKatedra telekomunikácií––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––
________________________________________________________________________
42
5 Výber predspracujúceho procesora, CAN transceivera
a detailný návrh obvodov senzora
5.1 Kritériá výberu
V sú asnej dobe, ke je výpo tová technika roz írená do v etkých odvetví ivota
je sortiment vyrábaných procesorov ve mi iroký. Pre výber vhodného procesora do
konkrétnej aplikácie je nevyhnutná nielen detailná znalos danej aplikácie, ale aj znalos
íslicovej a procesorovej techniky. Kritériá výberu najvhodnej ieho procesora pre danú
aplikáciu sa primárne stanovujú z po iadaviek aplikácie na procesor. To znamená, e
vybraný procesor musí by schopný splni v etky po adované funkcie a tie disponova
takými parametrami (rýchlos , po et portov...), ktoré dovo ujú ladenie vyvíjanej
aplikácie, prípadne jej budúce roz írenie o nové funkcie. Za sekundárne kritériá výberu
procesora mô eme pova ova jeho schopnos pracova v ur itých prevádzkových
podmienkach, dostupnos na trhu a to nie len samotného procesora, ale aj vývojového
prostredia (vývojové dosky, simulátory, emulátory, kompilátory...) doporu ovaného
výrobcom procesora. al ím kritériom ovplyv ujúcim výber je bezpochyby cena
procesora a cena vývojového prostredia. Puzdro procesora mô e výber tie ovplyvni .
5.2 Výber procesora pre inteligentný senzorový modul
Primárne po iadavky na procesor inteligentného senzorového modulu:
- Integrovaný CAN radi
- Schopnos komunikova s ubovolným CAN transceiverom
- Spracováva dáta získané cez CAN transceiver zo zbernice CAN
- Vysiela dáta na zbernicu CAN pod a pecifikácie 2.0 A a/alebo B
- o najmen ia spotreba el. energie
Uvedené primárne po iadavky sú typické pre automobilové aplikácie a nie sú vôbec
ni ím neobvyklé. Pre tento ú el ponúka vä ina svetových výrobcov procesory vyvinuté
práve pre automobilový priemysel. Ich stru ný preh ad je uvedený v prílohe íslo 3.
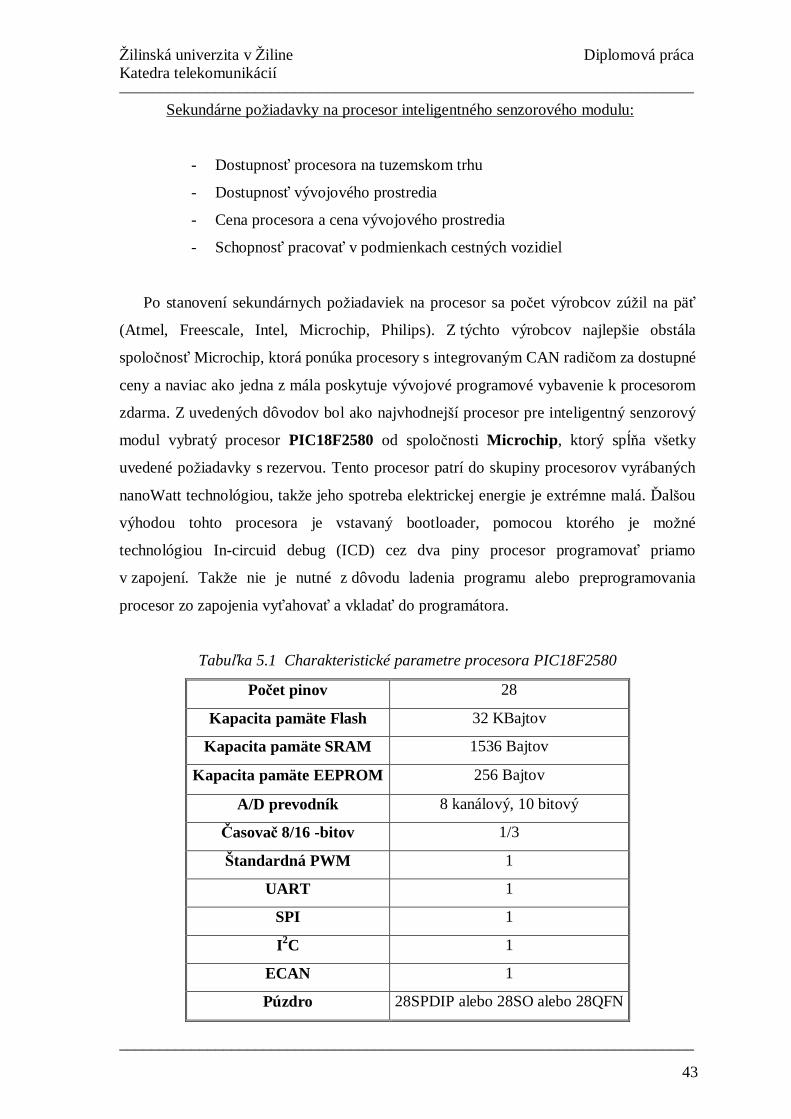
ilinská univerzita v iline Diplomová prácaKatedra telekomunikácií––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––
________________________________________________________________________
43
Sekundárne po iadavky na procesor inteligentného senzorového modulu:
- Dostupnos procesora na tuzemskom trhu
- Dostupnos vývojového prostredia
- Cena procesora a cena vývojového prostredia
- Schopnos pracova v podmienkach cestných vozidiel
Po stanovení sekundárnych po iadaviek na procesor sa po et výrobcov zú il na pä
(Atmel, Freescale, Intel, Microchip, Philips). Z týchto výrobcov najlep ie obstála
spolo nos Microchip, ktorá ponúka procesory s integrovaným CAN radi om za dostupné
ceny a naviac ako jedna z mála poskytuje vývojové programové vybavenie k procesorom
zdarma. Z uvedených dôvodov bol ako najvhodnej í procesor pre inteligentný senzorový
modul vybratý procesor PIC18F2580 od spolo nosti Microchip, ktorý sp a v etky
uvedené po iadavky s rezervou. Tento procesor patrí do skupiny procesorov vyrábaných
nanoWatt technológiou, tak e jeho spotreba elektrickej energie je extrémne malá. al ou
výhodou tohto procesora je vstavaný bootloader, pomocou ktorého je mo né
technológiou In-circuid debug (ICD) cez dva piny procesor programova priamo
v zapojení. Tak e nie je nutné z dôvodu ladenia programu alebo preprogramovania
procesor zo zapojenia vy ahova a vklada do programátora.
Tabu ka 5.1 Charakteristické parametre procesora PIC18F2580
Po et pinov 28
Kapacita pamäte Flash 32 KBajtov
Kapacita pamäte SRAM 1536 Bajtov
Kapacita pamäte EEPROM 256 Bajtov
A/D prevodník 8 kanálový, 10 bitový
asova 8/16 -bitov 1/3
tandardná PWM 1
UART 1
SPI 1
I2C 1
ECAN 1
Púzdro 28SPDIP alebo 28SO alebo 28QFN
ilinská univerzita v iline Diplomová prácaKatedra telekomunikácií––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––
________________________________________________________________________
44
5.3 Výber CAN transceivera
Funkcia CAN transceivera bola podrobne vysvetlené v kapitole 4.2. Hlavnou
úlohou CAN transceivera je konvertova digitálny signál vysielaný CAN Controllerom na
signál vhodný pre prenos cez fyzickú vrstvu zbernice CAN. Taktie zabezpe uje spätnú
konverziu signálov prijímaných zo zbernice na digitálny signál vhodný pre CAN
Controller. Jeho vstupná impedancia ur uje maximálny po et uzlov zbernice. V praxi sa
realizuje ako samostatný integrovaný obvod.
Norma ISO 11898-2 pecifikuje po iadavky, ktoré musí ka dý CAN transceiver
sp . Tieto po iadavky sú zavedené na dosiahnutie odolnosti vo i ru eniu a ochrane
CAN uzlov proti ne iadúcim vplyvom. CAN transceiver musí by odolný vo i skratu na
zbernici a odolný vo i prepätiu na zbernici od -150V do +100V. alej norma ISO 11898
pecifikuje, e CAN transceiver musí by schopný pracova s bitovou rýchlos ou 1 Mb/s
pri d ke zbernice 40m. Pre dlh iu zbernicu musí by schopný fungova s ni ími
rýchlos ami stanovenými normou. Tieto rýchlosti sú odvodené z doby írenia signálu po
zbernici (Propagation delay).
Pri výbere vhodného CAN transceivera pre inteligentný senzorový modul, je
mo né postupova obdobne ako pri výbere procesora.
Primárne po iadavky na CAN transceiver inteligentného senzorového modulu:
- Implementácia fyzickej vrstvy pod a normy ISO11898-2
- Schopnos pracova vo vozidlách s 12V aj 24V palubnou sie ou
- Schopnos komunikova s vybraným procesorom
Dá sa poveda , e sekundárne po iadavky pre oba komponenty (procesor aj
transceiver) sú rovnaké.
etci výrobcovia uvedený prílohe 3, vyrábajú aj CAN transceivery, ktoré sa
navzájom lí ia len v detailoch. Ve mi vhodným rie ením výberu je pou itie CAN
transceivera od rovnakého výrobcu ako je vybraný procesor. Tým zaru íme dostupnos
oboch komponentov od jedného dodávate a. S toho dôvodu je ako transceiver
inteligentného senzorového modulu vybraný CAN transceiver MCP2551 vyrábaný
spolo nos ou Microchip.
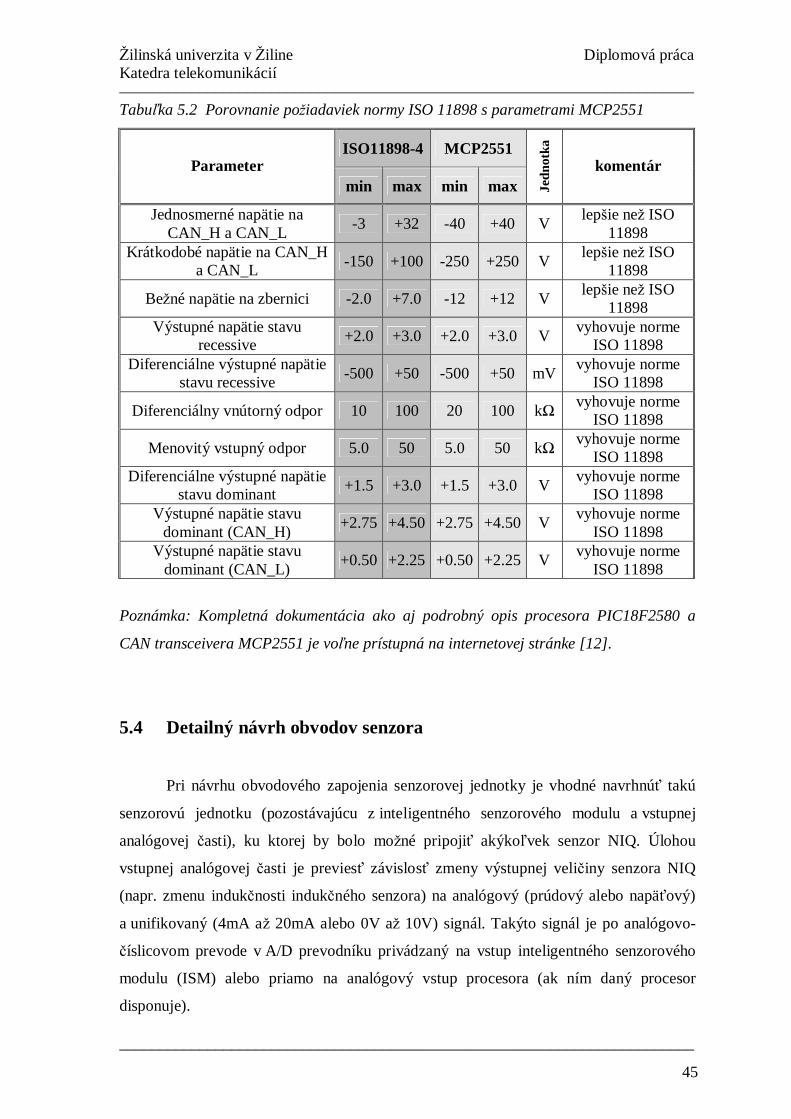
ilinská univerzita v iline Diplomová prácaKatedra telekomunikácií––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––
________________________________________________________________________
45
Tabu ka 5.2 Porovnanie po iadaviek normy ISO 11898 s parametrami MCP2551
ISO11898-4 MCP2551Parameter
min max min max Jedn
otka
komentár
Jednosmerné napätie naCAN_H a CAN_L -3 +32 -40 +40 V lep ie ne ISO
11898Krátkodobé napätie na CAN_H
a CAN_L -150 +100 -250 +250 V lep ie ne ISO11898
Be né napätie na zbernici -2.0 +7.0 -12 +12 V lep ie ne ISO11898
Výstupné napätie stavurecessive +2.0 +3.0 +2.0 +3.0 V vyhovuje norme
ISO 11898Diferenciálne výstupné napätie
stavu recessive -500 +50 -500 +50 mV vyhovuje normeISO 11898
Diferenciálny vnútorný odpor 10 100 20 100 k vyhovuje normeISO 11898
Menovitý vstupný odpor 5.0 50 5.0 50 k vyhovuje normeISO 11898
Diferenciálne výstupné napätiestavu dominant +1.5 +3.0 +1.5 +3.0 V vyhovuje norme
ISO 11898Výstupné napätie stavu
dominant (CAN_H) +2.75 +4.50 +2.75 +4.50 V vyhovuje normeISO 11898
Výstupné napätie stavudominant (CAN_L) +0.50 +2.25 +0.50 +2.25 V vyhovuje norme
ISO 11898
Poznámka: Kompletná dokumentácia ako aj podrobný opis procesora PIC18F2580 a
CAN transceivera MCP2551 je vo ne prístupná na internetovej stránke [12].
5.4 Detailný návrh obvodov senzora
Pri návrhu obvodového zapojenia senzorovej jednotky je vhodné navrhnú takú
senzorovú jednotku (pozostávajúcu z inteligentného senzorového modulu a vstupnej
analógovej asti), ku ktorej by bolo mo né pripoji akýko vek senzor NIQ. Úlohou
vstupnej analógovej asti je previes závislos zmeny výstupnej veli iny senzora NIQ
(napr. zmenu induk nosti induk ného senzora) na analógový (prúdový alebo napä ový)
a unifikovaný (4mA a 20mA alebo 0V a 10V) signál. Takýto signál je po analógovo-
íslicovom prevode v A/D prevodníku privádzaný na vstup inteligentného senzorového
modulu (ISM) alebo priamo na analógový vstup procesora (ak ním daný procesor
disponuje).
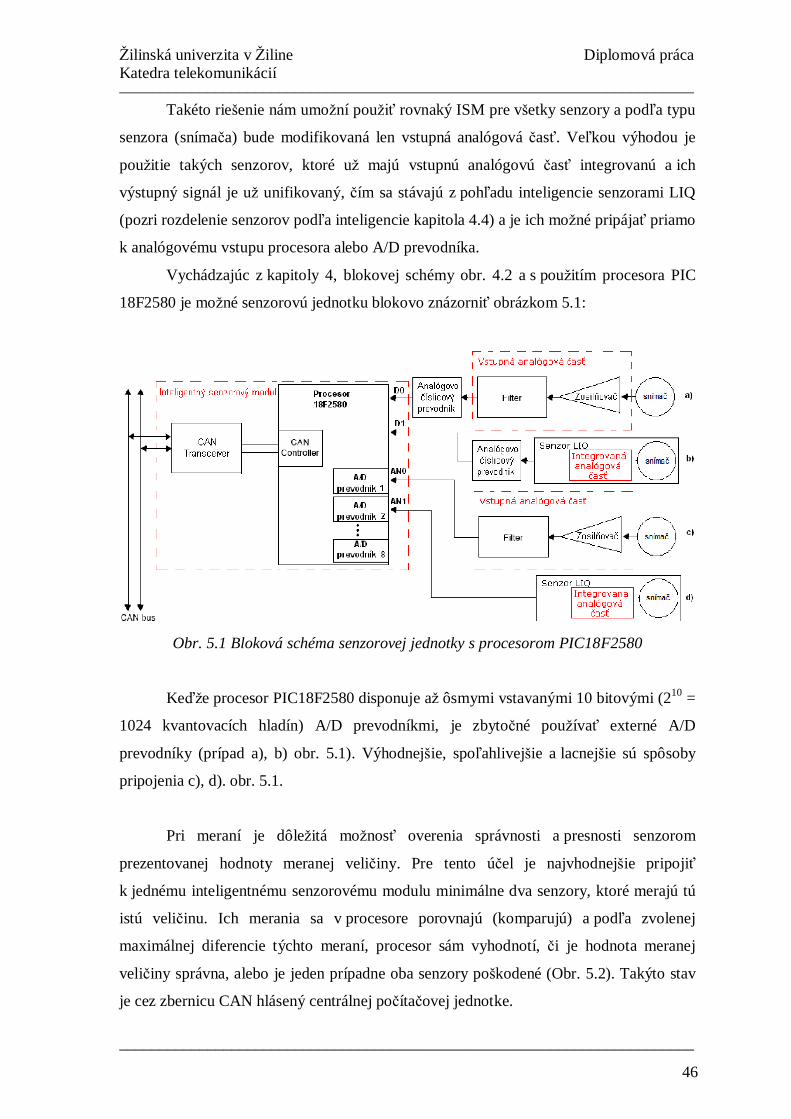
ilinská univerzita v iline Diplomová prácaKatedra telekomunikácií––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––
________________________________________________________________________
46
Takéto rie enie nám umo ní pou rovnaký ISM pre v etky senzory a pod a typu
senzora (sníma a) bude modifikovaná len vstupná analógová as . Ve kou výhodou je
pou itie takých senzorov, ktoré u majú vstupnú analógovú as integrovanú a ich
výstupný signál je u unifikovaný, ím sa stávajú z poh adu inteligencie senzorami LIQ
(pozri rozdelenie senzorov pod a inteligencie kapitola 4.4) a je ich mo né pripája priamo
k analógovému vstupu procesora alebo A/D prevodníka.
Vychádzajúc z kapitoly 4, blokovej schémy obr. 4.2 a s pou itím procesora PIC
18F2580 je mo né senzorovú jednotku blokovo znázorni obrázkom 5.1:
Obr. 5.1 Bloková schéma senzorovej jednotky s procesorom PIC18F2580
Ke e procesor PIC18F2580 disponuje a ôsmymi vstavanými 10 bitovými (210 =
1024 kvantovacích hladín) A/D prevodníkmi, je zbyto né pou íva externé A/D
prevodníky (prípad a), b) obr. 5.1). Výhodnej ie, spo ahlivej ie a lacnej ie sú spôsoby
pripojenia c), d). obr. 5.1.
Pri meraní je dôle itá mo nos overenia správnosti a presnosti senzorom
prezentovanej hodnoty meranej veli iny. Pre tento ú el je najvhodnej ie pripoji
k jednému inteligentnému senzorovému modulu minimálne dva senzory, ktoré merajú tú
istú veli inu. Ich merania sa v procesore porovnajú (komparujú) a pod a zvolenej
maximálnej diferencie týchto meraní, procesor sám vyhodnotí, i je hodnota meranej
veli iny správna, alebo je jeden prípadne oba senzory po kodené (Obr. 5.2). Takýto stav
je cez zbernicu CAN hlásený centrálnej po íta ovej jednotke.
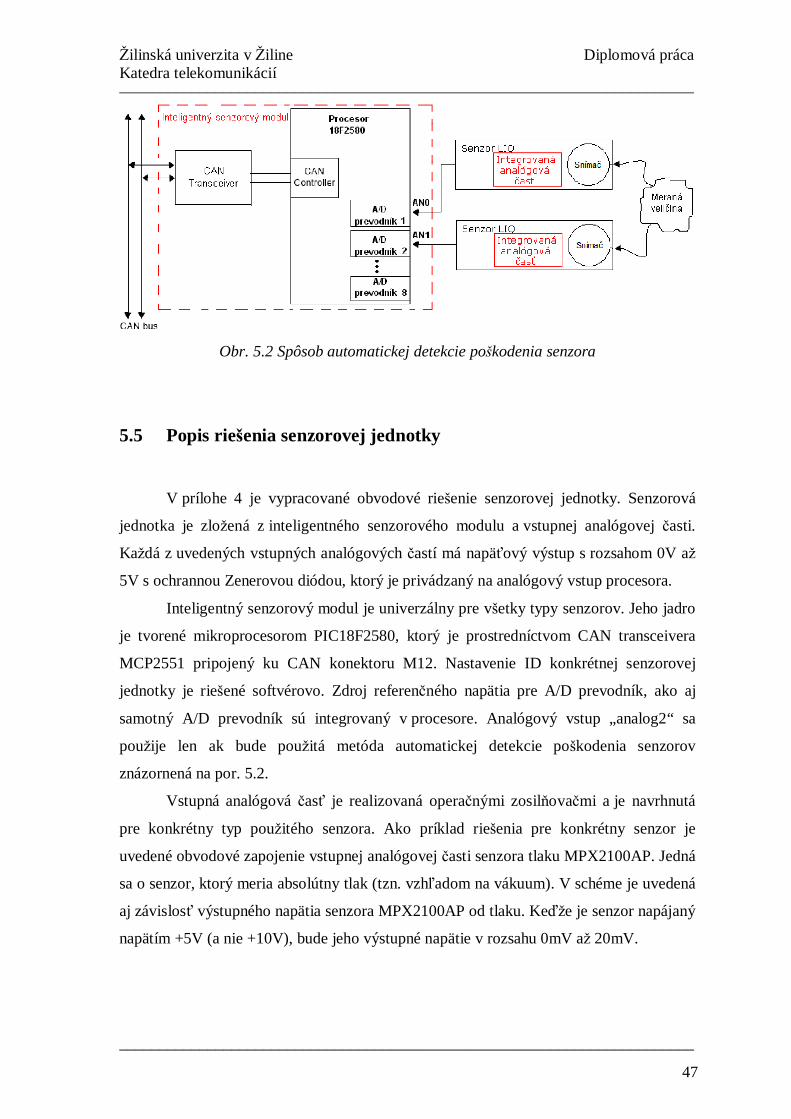
ilinská univerzita v iline Diplomová prácaKatedra telekomunikácií––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––
________________________________________________________________________
47
Obr. 5.2 Spôsob automatickej detekcie po kodenia senzora
5.5 Popis rie enia senzorovej jednotky
V prílohe 4 je vypracované obvodové rie enie senzorovej jednotky. Senzorová
jednotka je zlo ená z inteligentného senzorového modulu a vstupnej analógovej asti.
Ka dá z uvedených vstupných analógových astí má napä ový výstup s rozsahom 0V a
5V s ochrannou Zenerovou diódou, ktorý je privádzaný na analógový vstup procesora.
Inteligentný senzorový modul je univerzálny pre v etky typy senzorov. Jeho jadro
je tvorené mikroprocesorom PIC18F2580, ktorý je prostredníctvom CAN transceivera
MCP2551 pripojený ku CAN konektoru M12. Nastavenie ID konkrétnej senzorovej
jednotky je rie ené softvérovo. Zdroj referen ného napätia pre A/D prevodník, ako aj
samotný A/D prevodník sú integrovaný v procesore. Analógový vstup „analog2“ sa
pou ije len ak bude pou itá metóda automatickej detekcie po kodenia senzorov
znázornená na por. 5.2.
Vstupná analógová as je realizovaná opera nými zosil ova mi a je navrhnutá
pre konkrétny typ pou itého senzora. Ako príklad rie enia pre konkrétny senzor je
uvedené obvodové zapojenie vstupnej analógovej asti senzora tlaku MPX2100AP. Jedná
sa o senzor, ktorý meria absolútny tlak (tzn. vzh adom na vákuum). V schéme je uvedená
aj závislos výstupného napätia senzora MPX2100AP od tlaku. Ke e je senzor napájaný
napätím +5V (a nie +10V), bude jeho výstupné napätie v rozsahu 0mV a 20mV.
ilinská univerzita v iline Diplomová prácaKatedra telekomunikácií––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––
________________________________________________________________________
48
Pomocou vhodnej vo by odporu paralelne zapojených rezistorov RP2 je mo né
nastavi referen ný tlak, tzn. taký pri ktorom bude výstupné napätie obvodu rovné
zvolenej hodnote (napr. 1V). Ak tlak poklesne pod hodnotu referen ného tlaku, bude
výstupné napätie obvodu men ie ako zvolená hodnota, ak tlak naopak stúpne, výstupné
napätie bude narasta .
V sú asnosti je na trhu ve ké mno stvo senzorov, ktorých analógový výstup je
unifikovaný pod a medzinárodného tandardu. Takýto výstup mô e by bu napä ový
v rozsahu 0V a 10V alebo prúdový v rozsahu 4mA a 20 mA. Pou itie takýchto
senzorov do zna nej miery u ah uje a unifikuje realizáciu vstupnej analógovej asti. Pre
oba typy senzorov s unifikovaným analógovým výstupom je vypracované obvodové
zapojenie vstupnej analógovej asti.
5.6 Návrh centrálneho napájacieho zdroja senzorových jednotiek
Centrálny napájací zdroj senzorových jednotiek slú i ako zdroj elektrickej energie
pre jednotlivé aktívne prvky senzorových jednotiek a aktívnych senzorov. Pri jeho
realizácií musíme uva ova :
o Vstupné napätie a maximálny príkon zdroja
o Výstupné napätia a výstupné prúdy
o Galvanické oddelenie vstupnej asti zdroja
o Odolnos vo i skratu na ktoromko vek výstupe
o Odolnos vo i pracovnému prostrediu
5.6.1 Rie enie centrálneho napájacieho zdroja:
Vstupné napätie:
Vstupná as napájacieho zdroja bude pripojená k palubnej sieti vozidla, ktorej
napätie je bu +24V alebo +12V vo i kostre vozidla. Toto napätie sa v ak v praxi mô e
pohybova od +8V do 15V pre 12V-tovú palubnú sie a od +18V do 32V pre 24V-ovú
palubnú sie . Napájací zdroj by mal by univerzálne pou ite ný pre obe palubné siete.
Teda musí by schopný pracova pri vstupnom napätí od 8V do 32V.
ilinská univerzita v iline Diplomová prácaKatedra telekomunikácií––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––
________________________________________________________________________
49
Ur enie maximálneho výkonu zdroja:
Maximálny po et senzorových jednotiek pripojených ku zbernici CAN je
limitovaný vstupnou impedanciou CAN transceivera a pri pou ití CAN transceivera
MCP2551 je ich maximálny po et 112 [12]. Aj ke navrhovaná senzorová sie musí
by rekonfigurovate ná pre konkrétny typ nákladu, po et senzorových jednotiek celého
vozidla neprekro í po et 20.
Ka dá senzorová jednotka bude obsahova CAN transceiver MCP2551 a procesor
PIC18F2580, ktoréhých maximálna spotreba je 0,375W a 1W. alej musíme uva ova
spotrebu vstupnej analógovej asti (opera ných zosil ova ov) pri pou ití senzorov NIQ
alebo spotrebu aktívnych senzorov LIQ (s integrovanou vstupnou analógovou as ou).
Táto spotreba sa mô e lí pod a typu senzora a empiricky ju mô eme stanovi na 0,1W.
Ke e ka dá senzorová jednotka mô e obsahova dva senzory spotreba vstupnej asti
bude 0,2W. Ur enie spotreby jednej senzorovej jednotky:
0,375W + 1W + 0,2W = 1,575W
Pri maximálnom po te senzorových jednotiek 20 je celková maximálna spotreba:
20 x 1,575W = 31,5W
Ak uva ujeme ur itú výkonovú rezervu, stanovíme výkon napájacieho zdroja na 50W.
Ur enie výstupných napätí zdroja:
Ak uva ujeme, e procesor ako aj CAN transceiver pracujú s nesymetrickým
napájacím napätím +5V je nutné navrhnú zdroj disponujúci týmto napätím. Nie je v ak
vhodné aby zdroj +5V bol spolo ný pre celú zbernicu, preto e by toto napätie bolo
vplyvom úbytkov na zbernici nepresné. Preto ka dá senzorová jednotka obsahuje
integrovaný stabilizátor +5V, ktorý je napájaný z centrálneho zdroja. alej musíme bra
do úvahy, e niektoré aktívne senzory ako aj niektoré opera né zosil ova e vy adujú
symetrické napájanie. Z uvedených dôvodov je najvhodnej ie, aby centrálny zdroj
poskytoval výstupné napätie ± 12V. Ke e stabilizátory +5V budú napájané z vetvy
+12V a ich maximálna spotreba je: 20 x (1W + 0,375W) = 27,5W.
K vetve +12V musíme tie pripo íta polovicu spotreby vstupnej analógovej asti
senzorovej jednotky: 20 x 0,1W = 2W.
Teda výkon centrálneho napájacieho zdroja (aj s rezervou) bude rozlo ený na
vetvu +12V 80% výkonu o zodpovedá 40W a na vetvu -12V 20% výkonu o zodpovedá
10W.
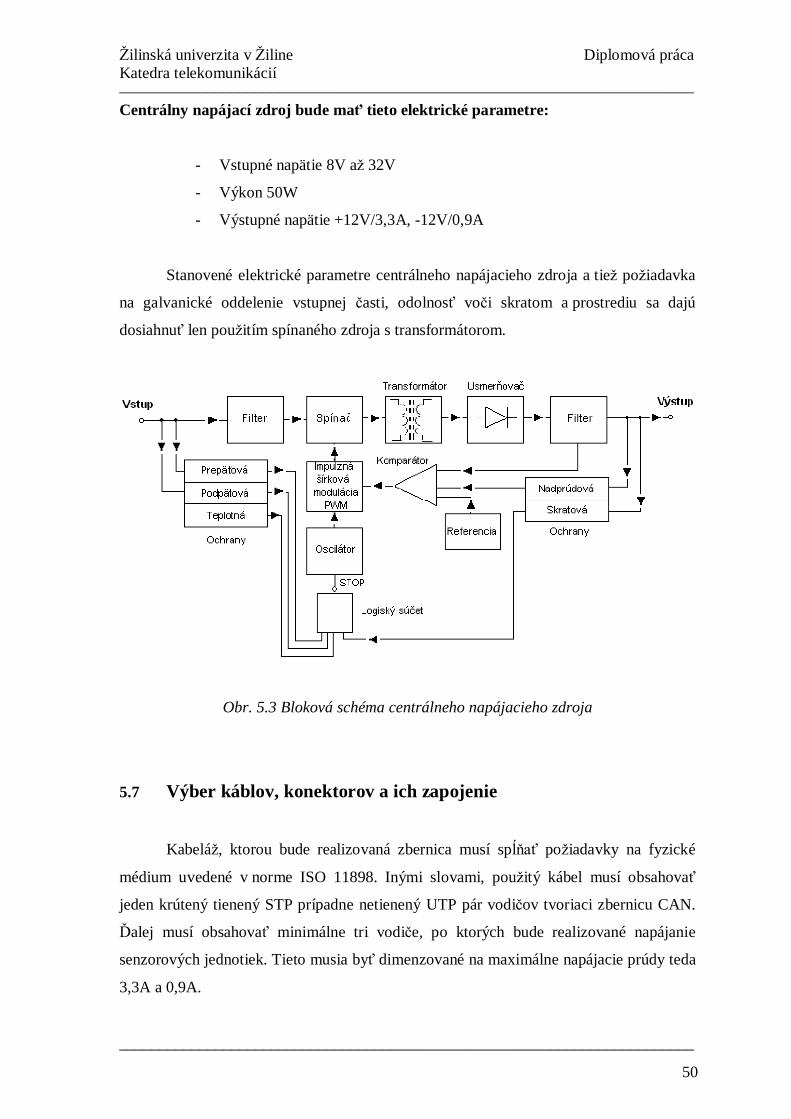
ilinská univerzita v iline Diplomová prácaKatedra telekomunikácií––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––
________________________________________________________________________
50
Centrálny napájací zdroj bude ma tieto elektrické parametre:
- Vstupné napätie 8V a 32V
- Výkon 50W
- Výstupné napätie +12V/3,3A, -12V/0,9A
Stanovené elektrické parametre centrálneho napájacieho zdroja a tie po iadavka
na galvanické oddelenie vstupnej asti, odolnos vo i skratom a prostrediu sa dajú
dosiahnu len pou itím spínaného zdroja s transformátorom.
Obr. 5.3 Bloková schéma centrálneho napájacieho zdroja
5.7 Výber káblov, konektorov a ich zapojenie
Kabelá , ktorou bude realizovaná zbernica musí sp po iadavky na fyzické
médium uvedené v norme ISO 11898. Inými slovami, pou itý kábel musí obsahova
jeden krútený tienený STP prípadne netienený UTP pár vodi ov tvoriaci zbernicu CAN.
alej musí obsahova minimálne tri vodi e, po ktorých bude realizované napájanie
senzorových jednotiek. Tieto musia by dimenzované na maximálne napájacie prúdy teda
3,3A a 0,9A.
ilinská univerzita v iline Diplomová prácaKatedra telekomunikácií––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––
________________________________________________________________________
51
Obr. 5.4 Kabelá zbernice CAN
Ako je zrejmé z obrázku 5.4, jednotlivé senzorové jednotky budú ku zbernici
pripájané pomocou T - lenov alebo Y - lenov. Napájacie vodi e kábla prepájajúceho
senzorovú jednotku s T - lenom u mô u by dimenzované na prúdy jedinej senzorovej
jednotky (pribli ne 110 mA). Ka dý T - len a Y – len je vybavený tromi konektormi,
pomocou ktorých je zapojený do kabelá e a pripojený k jednej senzorovej jednotke. Pri
výbere konektorov je vhodné vybra rovnaký typ konektora pre v etky senzorové
jednotky a T - leny, ím zvý ime flexibilitu a rekonfigurovate nos zbernice. Centrálna
po íta ová jednotka má konektor na pripojenie ku zbernici CAN vstavaný a pod a neho
vyberieme protikus pripojený ku zbernici. Centrálny napájací zdroj mô e ma rovnaký
konektor ako senzorové jednotky, bude ma zapojené len napájacie kontakty konektora.
V tabu ke 5.4 sú uvedené komponenty na stavbu kabelá e zbernice CAN pou ívané
v priemyselných aplikáciách, ktoré sp ajú po iadavky na senzorovú zbernicu vozidla.
Uvedené sú komponenty s konektormi ozna ovanými ako „5-pin micro style connector“
alebo sa tie ozna ujú ako M12.
Pomocou komponentov uvedených v prílohe íslo 5 a vhodného kábla, mô e by
realizovaná kompletná kabelá zbernice CAN vrátane napájania senzorových jednotiek.
Ka dý s uvedených konektorov disponuje piatimi kontaktmi, o je dostato ný po et aj pre
napájanie. Zakon ovací rezistor bude zapojený na ka dom konci zbernice. Ka dá
senzorová jednotka bude pripájaná ku zbernici panelovou zástr kou umiestnenou na
svojom puzdre. Pasívny senzorový rozbo ova sa pou ije, ak sú v malej vzdialenosti od
seba umiestnené viaceré senzory.
ilinská univerzita v iline Diplomová prácaKatedra telekomunikácií––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––
________________________________________________________________________
52
6 Návrh truktúry komunika nej vety
Pre návrh komunika nej vety je nevyhnutné najskôr navrhnú komunika ný
protokol vy ích vrstiev (Higher Level Protocol). Ako bolo spomenuté v kapitole 3.1,
existuje nieko ko tandardizovaných HLP protokolov pre zbernicu CAN, ako je napr.
DeviceNet, OSEK, SDS, CANKingdom a CANopen. Ich nevýhodou je fakt, e sú príli
pecializované na ur itý typ aplikácií alebo naopak sú príli v eobecné. Preto si v drvivej
vä ine prípadov návrhári vytvoria vlastný HLP „ itý“ na mieru danej aplikácií. Pre návrh
HLP senzorovej siete zalo enej na zbernici CAN je dobrým rie ením vychádza
z niektorého zo tandardizovaných protokolov a z neho pou len tie funkcie a dátové
objekty, ktoré budú potrebné pre HLP senzorovej siete. Takéto rie enie zna ne u ah í
návrh HPL. Pri návrhu HLP senzorovej siete motorového vozidla je najvhodnej ie pou
komunika ný protokol vy ích vrstiev CANopen. Protokol CANopen umo uje
vývojárovi vyhnú sa rie eniu problémov pecifických pre zbernicu CAN, ako je
napríklad správne asovanie správ. Dosahuje sa to zavedením tandardných
komunika ných objektov.
6.1 CANopen
CANopen je vy í komunika ný protokol vytvorený na základe zbernice CAN.
Komunikácia prebieha na báze prená ania tzv. objektov. Objekt je základná komunika ná
jednotka prená ajúca dáta medzi zariadeniami komunikujúcimi protokolom CANopen.
Pod a svojho ur enia sa objekty delia do skupín. Z nich najdôle itej ie sú:
- Technologické objekty, tzv. PDO (Process Data Objects), ktoré prená ajú
informácie o technologických veli inách (merané veli iny). Ich d ka je 8
bajtov.
- Servisné objekty, tzv. SDO (Service Data Objects), ktoré prená ajú
servisné alebo konfigura né údaje (kon tanty, merací rozsah sníma a
a pod.). Ich d ka mô e by ubovo ne ve ká a v sieti majú nízku prioritu.
ilinská univerzita v iline Diplomová prácaKatedra telekomunikácií––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––
________________________________________________________________________
53
- Objekty pre správu siete, tzv. objekty NMT (Network Managment), ktoré
slú ia na konfigurovanie a riadenie prevádzky siete (hlásenie stavu
zariadenia, povel k novému spusteniu zariadenia a pod.). V sieti majú
najvy iu prioritu.
Organizácia CiA vydala pecifikáciu CiA DS 301, ktorá bola prijatá ako norma
EN 50325-4. Aplika ná vrstva CANopen a komunika ný profil pod a CiA DS 301
podporuje priamy prístup k parametrom zariadenia a prenos jeho asovo kritických
procesných dát. Sie ový mana ment CANopen výrazne zjednodu uje návrh riadiacich
systémov, poskytuje sie ové slu by NMT, asovú synchronizáciu procesov SYNC
a TIME STAMP, zabezpe enie prevádzky NODE/LIFE GUARDING, chybové hlásenie
EMERGENCY, prenos riadiacich dát PDO (Process Data Objects) a predov etkým
poskytuje mo nos rozsiahlych servisných nastavení prostredníctvom SDO (Servide Data
Objects). Komunikácia pri prenose SDO a objektov NMT prebieha v dy spôsobom
master-slave, tak e v sieti existuje iba jedno nadriadené zariadenie (master) a a 127
podriadených zariadení (slave). Na rozdiel od toho sa PDO prená ajú spôsobom zvaným
broadcast, tak e ka dé zariadenie zapojené v sieti má prístup ku v etkým hodnotám
technologických veli ín vysielaných na zbernicu.
6.1.1 Identifikátory protokolu CANopen
Ka dému komunika nému objektu (správe zbernice CAN) je priradený jeden
alebo viac identifikátorov, ktoré implicitne definujú jeho prioritu na zbernici. Priradenie
identifikátorov jednotlivým komunika ným objektom je jednou zo zásadných otázok pri
návrhu systému. K u ah eniu návrhu jednoduchých sietí definuje protokol CANopen
východiskové hodnoty identifikátorov pre v etky povinné objekty (tabu ka 6.1). Tieto
hodnoty sa inicializujú v predprevádzkovom stave (pre-operational) a ak je to nutné, je
ich mo né alej dynamicky modifikova .
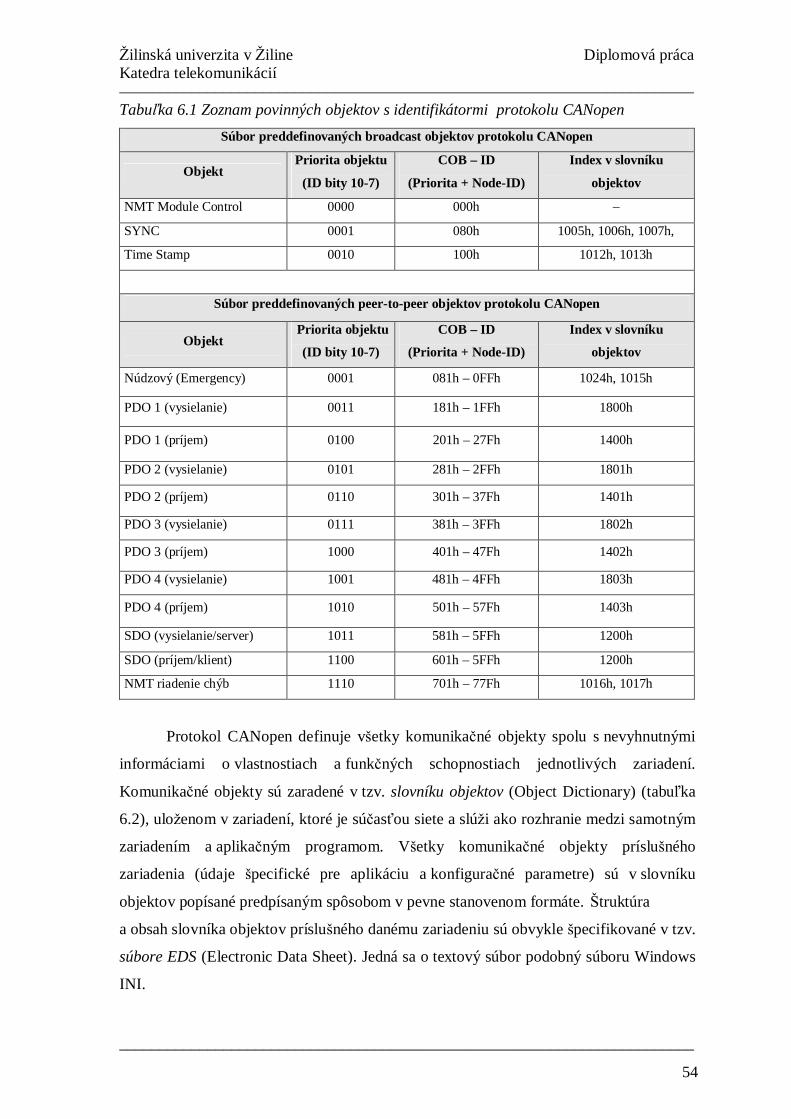
ilinská univerzita v iline Diplomová prácaKatedra telekomunikácií––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––
________________________________________________________________________
54
Tabu ka 6.1 Zoznam povinných objektov s identifikátormi protokolu CANopenSúbor preddefinovaných broadcast objektov protokolu CANopen
ObjektPriorita objektu
(ID bity 10-7)
COB – ID
(Priorita + Node-ID)
Index v slovníku
objektov
NMT Module Control 0000 000h –
SYNC 0001 080h 1005h, 1006h, 1007h,
Time Stamp 0010 100h 1012h, 1013h
Súbor preddefinovaných peer-to-peer objektov protokolu CANopen
Objekt Priorita objektu
(ID bity 10-7)
COB – ID
(Priorita + Node-ID)
Index v slovníku
objektov
Núdzový (Emergency) 0001 081h – 0FFh 1024h, 1015h
PDO 1 (vysielanie) 0011 181h – 1FFh 1800h
PDO 1 (príjem) 0100 201h – 27Fh 1400h
PDO 2 (vysielanie) 0101 281h – 2FFh 1801h
PDO 2 (príjem) 0110 301h – 37Fh 1401h
PDO 3 (vysielanie) 0111 381h – 3FFh 1802h
PDO 3 (príjem) 1000 401h – 47Fh 1402h
PDO 4 (vysielanie) 1001 481h – 4FFh 1803h
PDO 4 (príjem) 1010 501h – 57Fh 1403h
SDO (vysielanie/server) 1011 581h – 5FFh 1200h
SDO (príjem/klient) 1100 601h – 5FFh 1200h
NMT riadenie chýb 1110 701h – 77Fh 1016h, 1017h
Protokol CANopen definuje v etky komunika né objekty spolu s nevyhnutnými
informáciami o vlastnostiach a funk ných schopnostiach jednotlivých zariadení.
Komunika né objekty sú zaradené v tzv. slovníku objektov (Object Dictionary) (tabu ka
6.2), ulo enom v zariadení, ktoré je sú as ou siete a slú i ako rozhranie medzi samotným
zariadením a aplika ným programom. V etky komunika né objekty príslu ného
zariadenia (údaje pecifické pre aplikáciu a konfigura né parametre) sú v slovníku
objektov popísané predpísaným spôsobom v pevne stanovenom formáte. truktúra
a obsah slovníka objektov príslu ného danému zariadeniu sú obvykle pecifikované v tzv.
súbore EDS (Electronic Data Sheet). Jedná sa o textový súbor podobný súboru Windows
INI.
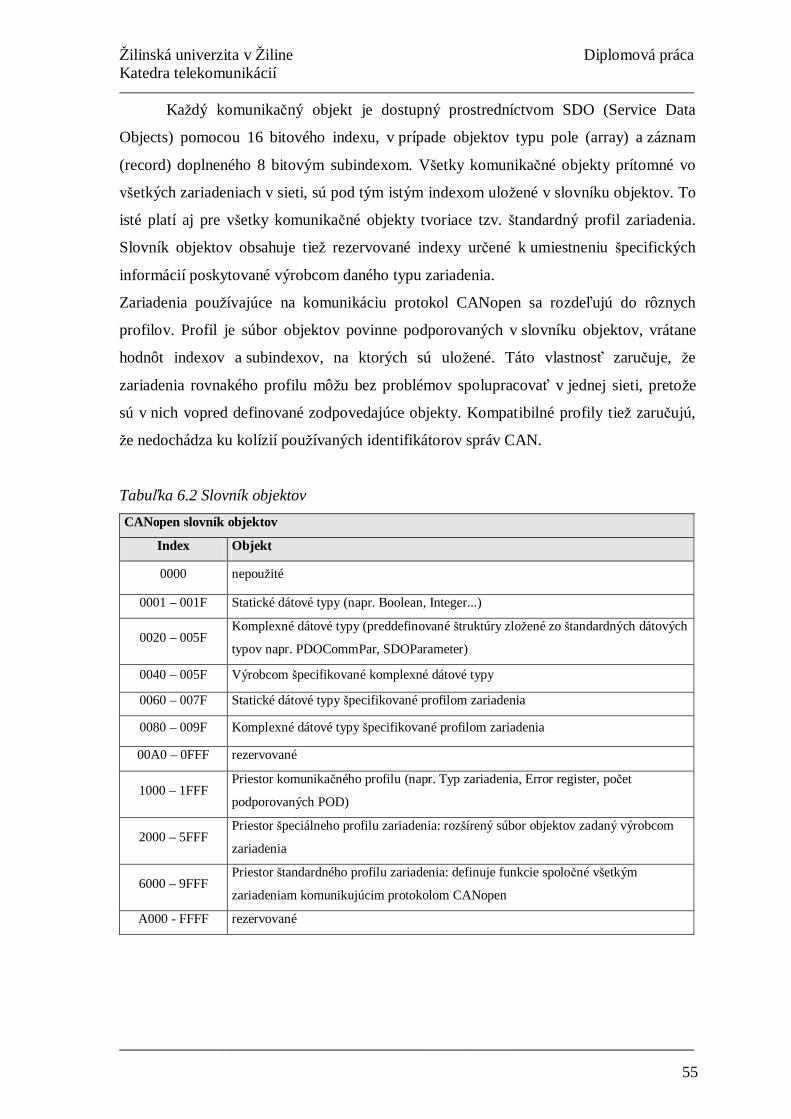
ilinská univerzita v iline Diplomová prácaKatedra telekomunikácií––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––
________________________________________________________________________
55
Ka dý komunika ný objekt je dostupný prostredníctvom SDO (Service Data
Objects) pomocou 16 bitového indexu, v prípade objektov typu pole (array) a záznam
(record) doplneného 8 bitovým subindexom. V etky komunika né objekty prítomné vo
etkých zariadeniach v sieti, sú pod tým istým indexom ulo ené v slovníku objektov. To
isté platí aj pre v etky komunika né objekty tvoriace tzv. tandardný profil zariadenia.
Slovník objektov obsahuje tie rezervované indexy ur ené k umiestneniu pecifických
informácií poskytované výrobcom daného typu zariadenia.
Zariadenia pou ívajúce na komunikáciu protokol CANopen sa rozde ujú do rôznych
profilov. Profil je súbor objektov povinne podporovaných v slovníku objektov, vrátane
hodnôt indexov a subindexov, na ktorých sú ulo ené. Táto vlastnos zaru uje, e
zariadenia rovnakého profilu mô u bez problémov spolupracova v jednej sieti, preto e
sú v nich vopred definované zodpovedajúce objekty. Kompatibilné profily tie zaru ujú,
e nedochádza ku kolízií pou ívaných identifikátorov správ CAN.
Tabu ka 6.2 Slovník objektovCANopen slovník objektov
Index Objekt
0000 nepou ité
0001 – 001F Statické dátové typy (napr. Boolean, Integer...)
0020 – 005FKomplexné dátové typy (preddefinované truktúry zlo ené zo tandardných dátových
typov napr. PDOCommPar, SDOParameter)
0040 – 005F Výrobcom pecifikované komplexné dátové typy
0060 – 007F Statické dátové typy pecifikované profilom zariadenia
0080 – 009F Komplexné dátové typy pecifikované profilom zariadenia
00A0 – 0FFF rezervované
1000 – 1FFFPriestor komunika ného profilu (napr. Typ zariadenia, Error register, po et
podporovaných POD)
2000 – 5FFFPriestor peciálneho profilu zariadenia: roz írený súbor objektov zadaný výrobcom
zariadenia
6000 – 9FFFPriestor tandardného profilu zariadenia: definuje funkcie spolo né v etkým
zariadeniam komunikujúcim protokolom CANopen
A000 - FFFF rezervované
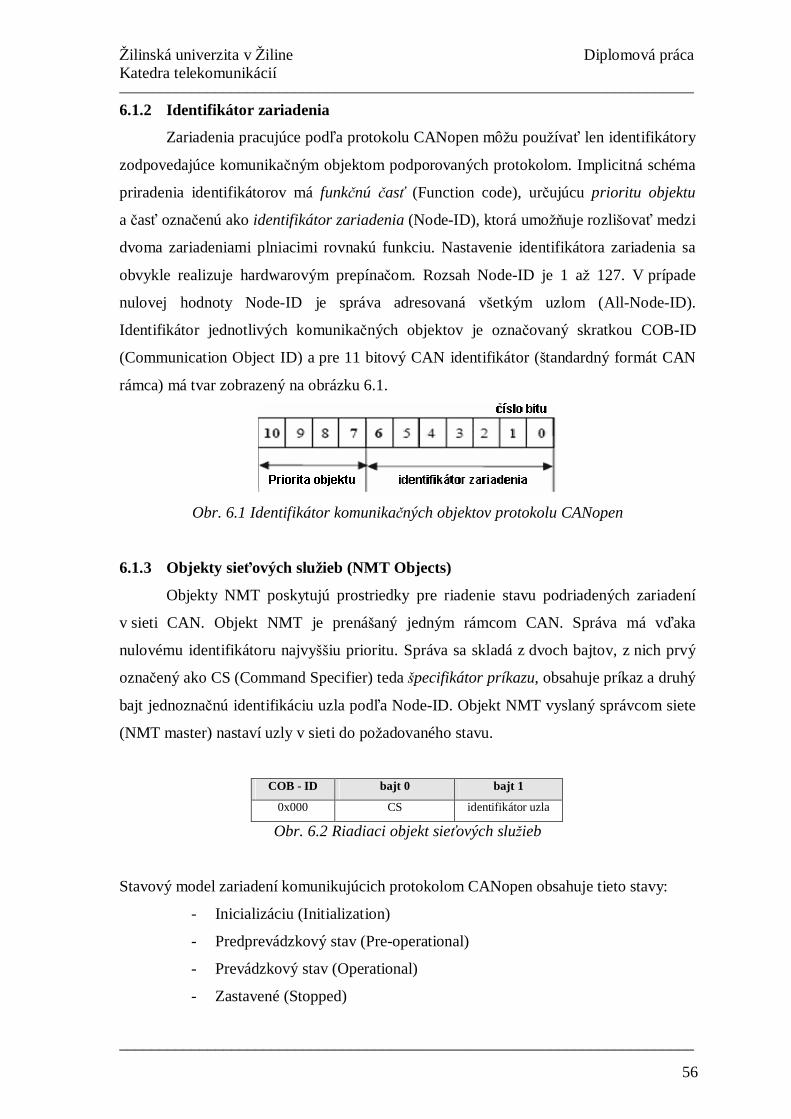
ilinská univerzita v iline Diplomová prácaKatedra telekomunikácií––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––
________________________________________________________________________
56
6.1.2 Identifikátor zariadenia
Zariadenia pracujúce pod a protokolu CANopen mô u pou íva len identifikátory
zodpovedajúce komunika ným objektom podporovaných protokolom. Implicitná schéma
priradenia identifikátorov má funk nú as (Function code), ur ujúcu prioritu objektu
a as ozna enú ako identifikátor zariadenia (Node-ID), ktorá umo uje rozli ova medzi
dvoma zariadeniami plniacimi rovnakú funkciu. Nastavenie identifikátora zariadenia sa
obvykle realizuje hardwarovým prepína om. Rozsah Node-ID je 1 a 127. V prípade
nulovej hodnoty Node-ID je správa adresovaná v etkým uzlom (All-Node-ID).
Identifikátor jednotlivých komunika ných objektov je ozna ovaný skratkou COB-ID
(Communication Object ID) a pre 11 bitový CAN identifikátor ( tandardný formát CAN
rámca) má tvar zobrazený na obrázku 6.1.
Obr. 6.1 Identifikátor komunika ných objektov protokolu CANopen
6.1.3 Objekty sie ových slu ieb (NMT Objects)
Objekty NMT poskytujú prostriedky pre riadenie stavu podriadených zariadení
v sieti CAN. Objekt NMT je prená aný jedným rámcom CAN. Správa má v aka
nulovému identifikátoru najvy iu prioritu. Správa sa skladá z dvoch bajtov, z nich prvý
ozna ený ako CS (Command Specifier) teda pecifikátor príkazu, obsahuje príkaz a druhý
bajt jednozna nú identifikáciu uzla pod a Node-ID. Objekt NMT vyslaný správcom siete
(NMT master) nastaví uzly v sieti do po adovaného stavu.
COB - ID bajt 0 bajt 1
0x000 CS identifikátor uzla
Obr. 6.2 Riadiaci objekt sie ových slu ieb
Stavový model zariadení komunikujúcich protokolom CANopen obsahuje tieto stavy:
- Inicializáciu (Initialization)
- Predprevádzkový stav (Pre-operational)
- Prevádzkový stav (Operational)
- Zastavené (Stopped)

ilinská univerzita v iline Diplomová prácaKatedra telekomunikácií––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––
________________________________________________________________________
57
Tabu ka 6.3 pecifikátor príkazu riadiacich slu ieb NMTpecifikátor
príkazuSlu ba NMT
1 tart vzdialeného uzla
1 Stop vzdialeného uzla
128 Spusti pred prevádzkový stav
129 Inicializácia uzla
130 Inicializácia komunikácie
Ka dé zariadenie je po zapnutí v stave inicializácie (signalizovanom správou
Boot-up), z ktorého automaticky prechádza do predprevádzkového stavu. V tomto stave
je u mo né prená SDO. Akonáhle riadiace zariadenie prepne vyslaním objektu NMT
dané zariadenie do prevádzkového stavu, mô e toto zariadenie za vysiela správy
PDO. V stave Stopped nie je mo ná iná komunikácia ne prenos správ typu NMT. Aby
bolo mo né inicializova uzol ako celok alebo iba jeho funkcie, má stav inicializácie tri
podstavy. Sú to: inicializácia aplikácie (Reset_Application), inicializácia komunikácie
(Reset_kommunication) a inicializácia zariadenia (Initialization Status). V podstave
Reset_Application sa nastavujú implicitné hodnoty parametrov ur ené výrobcom
a tandardné parametre pre zariadenie danej triedy. Pri Reset_Communication sa
nastavujú východiskové hodnoty parametrov komunikácie. Do tretieho podstavu
(Initialization Status) prechádza zariadenie automaticky po zapnutí alebo inicializácií
komunikácie alebo aplikácie. Pri zapnutí zariadenia sa v etky jeho parametre nastavujú na
naposledy ulo ené hodnoty. Po ukon ení inicializácie vy le zariadenie správu Boot-up
Object, ktorou riadiacemu zariadeniu oznamuje, e pre lo do predprevádzkového stavu.
Takto sa postupuje nielen po zapnutí zariadenia, ale aj pri náhodnom výpadku napájania
po as chodu. Správca siete sa tak dozvie, e zariadenie bolo prechodne mimo prevádzky
a mô e overi , i po as tejto doby nebola stratená iadna správa. Správa Boot-up Object
má rovnaký identifikátor ako správa Node/Life-guarding Object alebo Heardbeat Object,
na rozdiel od nich v ak neobsahuje iadne dáta.
Funkcie reprezentované objektmi Heardbeat Object a Node/Life-guarding Object
slú ia na odha ovanie chýb a na signalizáciu prítomnosti a stavu jednotlivých zariadení
v sieti.
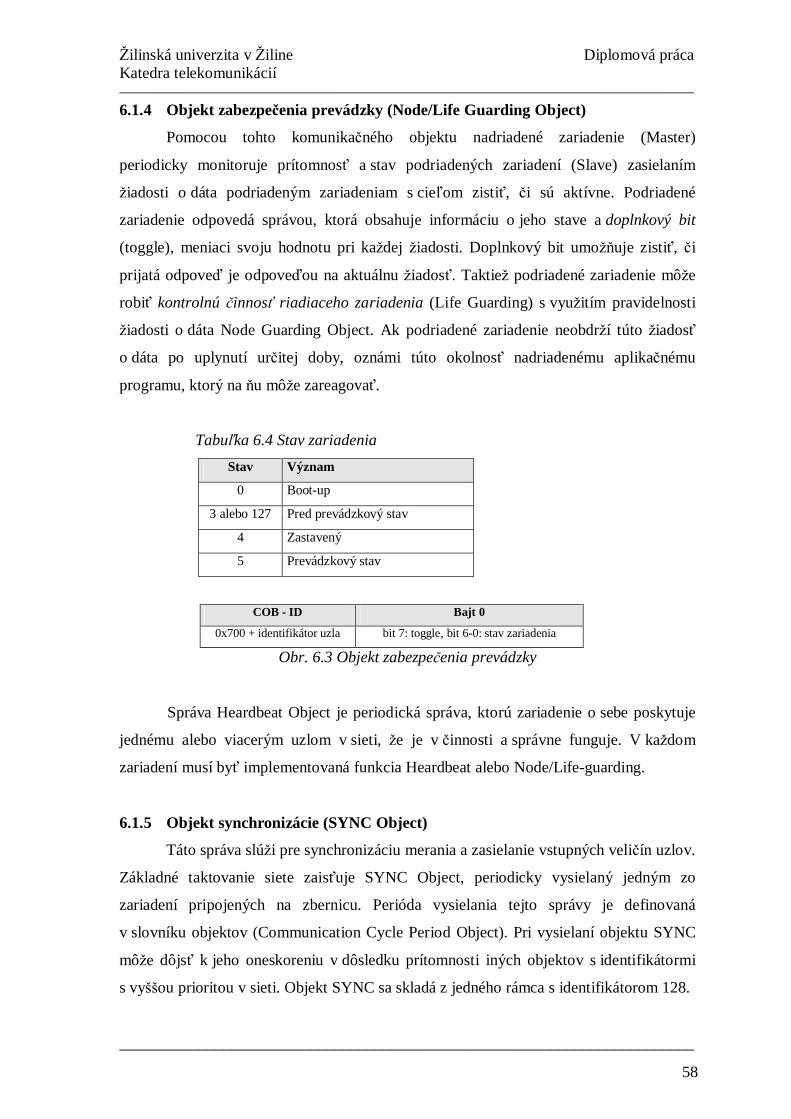
ilinská univerzita v iline Diplomová prácaKatedra telekomunikácií––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––
________________________________________________________________________
58
6.1.4 Objekt zabezpe enia prevádzky (Node/Life Guarding Object)
Pomocou tohto komunika ného objektu nadriadené zariadenie (Master)
periodicky monitoruje prítomnos a stav podriadených zariadení (Slave) zasielaním
iadosti o dáta podriadeným zariadeniam s cie om zisti , i sú aktívne. Podriadené
zariadenie odpovedá správou, ktorá obsahuje informáciu o jeho stave a doplnkový bit
(toggle), meniaci svoju hodnotu pri ka dej iadosti. Doplnkový bit umo uje zisti , i
prijatá odpove je odpove ou na aktuálnu iados . Taktie podriadené zariadenie mô e
robi kontrolnú innos riadiaceho zariadenia (Life Guarding) s vyu itím pravidelnosti
iadosti o dáta Node Guarding Object. Ak podriadené zariadenie neobdr í túto iados
o dáta po uplynutí ur itej doby, oznámi túto okolnos nadriadenému aplika nému
programu, ktorý na u mô e zareagova .
Tabu ka 6.4 Stav zariadeniaStav Význam
0 Boot-up
3 alebo 127 Pred prevádzkový stav
4 Zastavený
5 Prevádzkový stav
COB - ID Bajt 0
0x700 + identifikátor uzla bit 7: toggle, bit 6-0: stav zariadenia
Obr. 6.3 Objekt zabezpe enia prevádzky
Správa Heardbeat Object je periodická správa, ktorú zariadenie o sebe poskytuje
jednému alebo viacerým uzlom v sieti, e je v innosti a správne funguje. V ka dom
zariadení musí by implementovaná funkcia Heardbeat alebo Node/Life-guarding.
6.1.5 Objekt synchronizácie (SYNC Object)
Táto správa slú i pre synchronizáciu merania a zasielanie vstupných veli ín uzlov.
Základné taktovanie siete zais uje SYNC Object, periodicky vysielaný jedným zo
zariadení pripojených na zbernicu. Perióda vysielania tejto správy je definovaná
v slovníku objektov (Communication Cycle Period Object). Pri vysielaní objektu SYNC
mô e dôjs k jeho oneskoreniu v dôsledku prítomnosti iných objektov s identifikátormi
s vy ou prioritou v sieti. Objekt SYNC sa skladá z jedného rámca s identifikátorom 128.
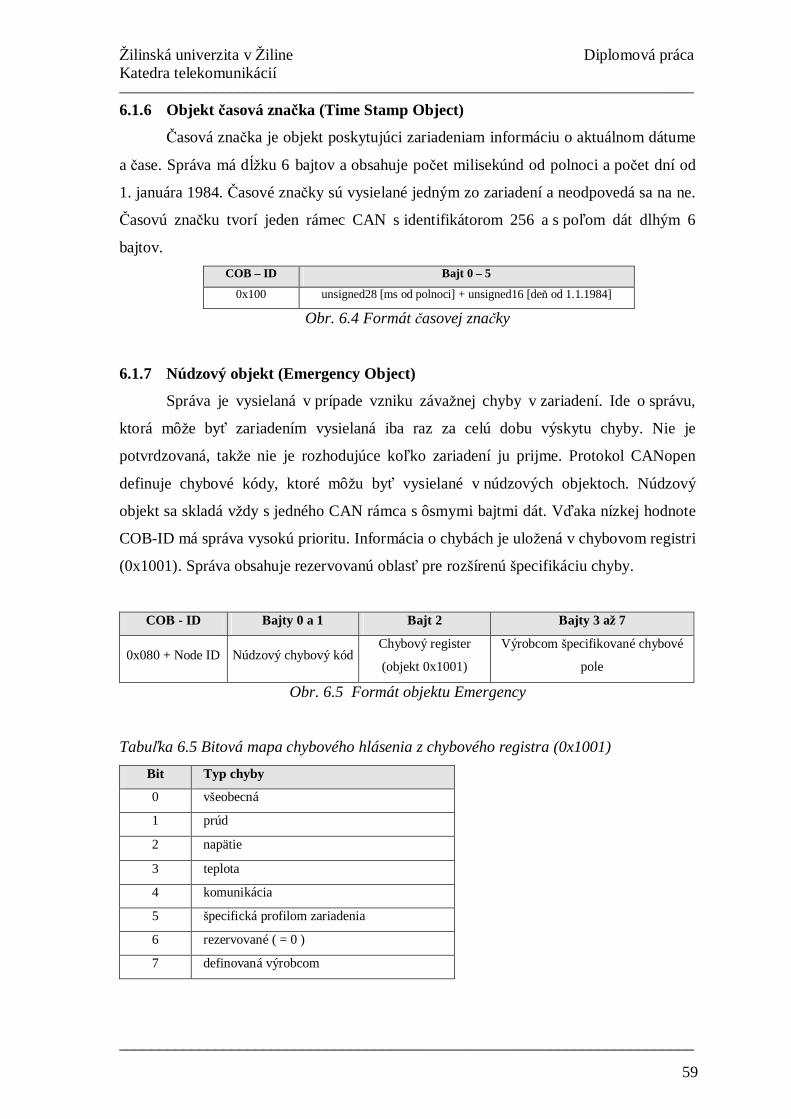
ilinská univerzita v iline Diplomová prácaKatedra telekomunikácií––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––
________________________________________________________________________
59
6.1.6 Objekt asová zna ka (Time Stamp Object)
asová zna ka je objekt poskytujúci zariadeniam informáciu o aktuálnom dátume
a ase. Správa má d ku 6 bajtov a obsahuje po et milisekúnd od polnoci a po et dní od
1. januára 1984. asové zna ky sú vysielané jedným zo zariadení a neodpovedá sa na ne.
asovú zna ku tvorí jeden rámec CAN s identifikátorom 256 a s po om dát dlhým 6
bajtov.COB – ID Bajt 0 – 5
0x100 unsigned28 [ms od polnoci] + unsigned16 [de od 1.1.1984]
Obr. 6.4 Formát asovej zna ky
6.1.7 Núdzový objekt (Emergency Object)
Správa je vysielaná v prípade vzniku záva nej chyby v zariadení. Ide o správu,
ktorá mô e by zariadením vysielaná iba raz za celú dobu výskytu chyby. Nie je
potvrdzovaná, tak e nie je rozhodujúce ko ko zariadení ju prijme. Protokol CANopen
definuje chybové kódy, ktoré mô u by vysielané v núdzových objektoch. Núdzový
objekt sa skladá v dy s jedného CAN rámca s ôsmymi bajtmi dát. V aka nízkej hodnote
COB-ID má správa vysokú prioritu. Informácia o chybách je ulo ená v chybovom registri
(0x1001). Správa obsahuje rezervovanú oblas pre roz írenú pecifikáciu chyby.
COB - ID Bajty 0 a 1 Bajt 2 Bajty 3 a 7
0x080 + Node ID Núdzový chybový kódChybový register
(objekt 0x1001)
Výrobcom pecifikované chybové
pole
Obr. 6.5 Formát objektu Emergency
Tabu ka 6.5 Bitová mapa chybového hlásenia z chybového registra (0x1001)Bit Typ chyby
0 v eobecná
1 prúd
2 napätie
3 teplota
4 komunikácia
5 pecifická profilom zariadenia
6 rezervované ( = 0 )
7 definovaná výrobcom
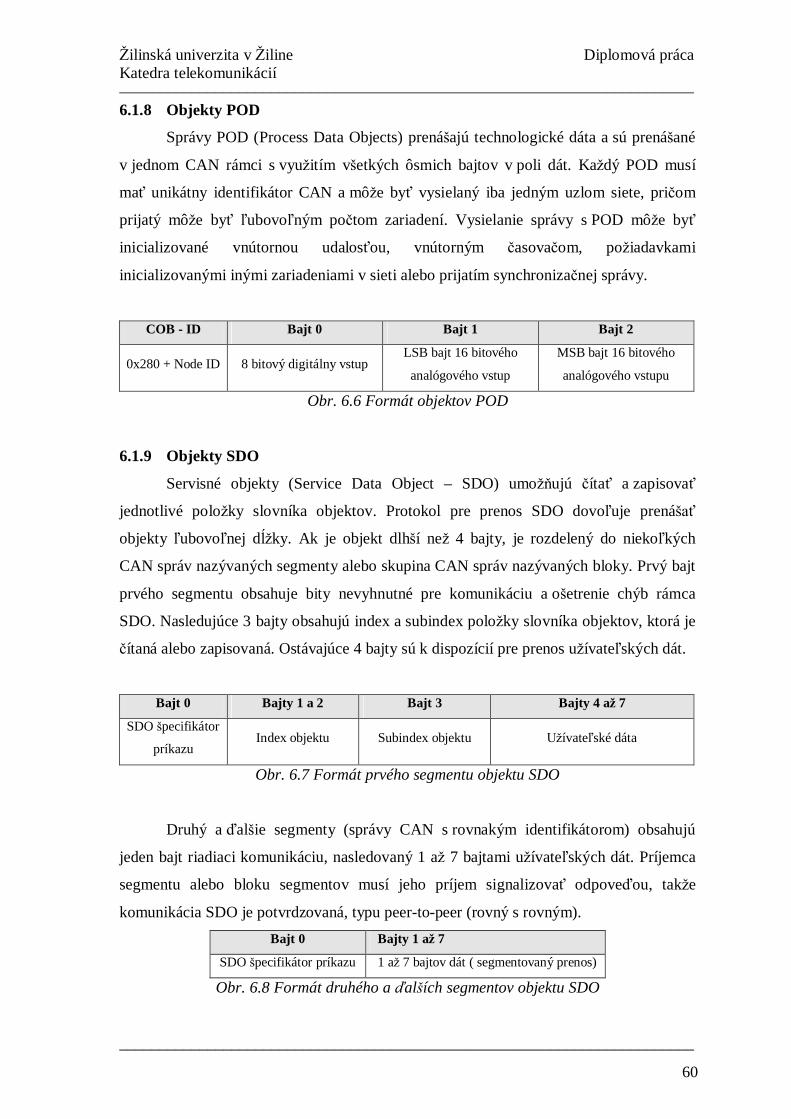
ilinská univerzita v iline Diplomová prácaKatedra telekomunikácií––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––
________________________________________________________________________
60
6.1.8 Objekty POD
Správy POD (Process Data Objects) prená ajú technologické dáta a sú prená ané
v jednom CAN rámci s vyu itím v etkých ôsmich bajtov v poli dát. Ka dý POD musí
ma unikátny identifikátor CAN a mô e by vysielaný iba jedným uzlom siete, pri om
prijatý mô e by ubovo ným po tom zariadení. Vysielanie správy s POD mô e by
inicializované vnútornou udalos ou, vnútorným asova om, po iadavkami
inicializovanými inými zariadeniami v sieti alebo prijatím synchroniza nej správy.
COB - ID Bajt 0 Bajt 1 Bajt 2
0x280 + Node ID 8 bitový digitálny vstupLSB bajt 16 bitového
analógového vstup
MSB bajt 16 bitového
analógového vstupu
Obr. 6.6 Formát objektov POD
6.1.9 Objekty SDO
Servisné objekty (Service Data Object – SDO) umo ujú íta a zapisova
jednotlivé polo ky slovníka objektov. Protokol pre prenos SDO dovo uje prená
objekty ubovo nej d ky. Ak je objekt dlh í ne 4 bajty, je rozdelený do nieko kých
CAN správ nazývaných segmenty alebo skupina CAN správ nazývaných bloky. Prvý bajt
prvého segmentu obsahuje bity nevyhnutné pre komunikáciu a o etrenie chýb rámca
SDO. Nasledujúce 3 bajty obsahujú index a subindex polo ky slovníka objektov, ktorá je
ítaná alebo zapisovaná. Ostávajúce 4 bajty sú k dispozícií pre prenos u ívate ských dát.
Bajt 0 Bajty 1 a 2 Bajt 3 Bajty 4 a 7
SDO pecifikátor
príkazuIndex objektu Subindex objektu ívate ské dáta
Obr. 6.7 Formát prvého segmentu objektu SDO
Druhý a al ie segmenty (správy CAN s rovnakým identifikátorom) obsahujú
jeden bajt riadiaci komunikáciu, nasledovaný 1 a 7 bajtami u ívate ských dát. Príjemca
segmentu alebo bloku segmentov musí jeho príjem signalizova odpove ou, tak e
komunikácia SDO je potvrdzovaná, typu peer-to-peer (rovný s rovným).Bajt 0 Bajty 1 a 7
SDO pecifikátor príkazu 1 a 7 bajtov dát ( segmentovaný prenos)
Obr. 6.8 Formát druhého a al ích segmentov objektu SDO

ilinská univerzita v iline Diplomová prácaKatedra telekomunikácií––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––
________________________________________________________________________
61
6.2 Návrh protokolu aplika nej vrstvy senzorovej siete
Okrem povinných objektov uvedených v tabu ke 6.1 budú pre komunikáciu medzi
senzorovými jednotkami a centrálnym palubným po íta om pou ité komunika né objekty
uvedené v tabu ke 6.6.
Ak palubný po íta po aduje informácie zo senzorovej jednotky, resp. ak
konfiguruje senzorovú jednotku, vy le na zbernicu komunika ný objekt typu SDO.
Ak senzorová jednotka vysiela údaje do palubného po íta a pou íva na tento ú el
objekty typu PDO.
Tabu ka 6.6 Objekty komunika ného protokolu senzorovej siete
Komunika nýobjekt Popis
SDO_CONFIG iados o vyslanie konfigura ných parametrov senzorovejjednotky
SDO_STATUS iados o vyslanie stavových parametrov senzorovej jednotky
SDO_DATA iados o vyslanie hodnoty veli iny meranej senzorovoujednotkou
PDO_CONFIG Vyslanie konfigura ných parametrov senzorovej jednotky naiados palubného po íta a
PDO_STATUS Vyslanie stavových parametrov senzorovej jednotky na iadospalubného po íta a
PDO_DATA Vyslanie hodnoty veli iny meranej senzorovou jednotkou naiados palubného po íta a
PDO_ALARMVyslanie poplachovej správy senzorovou jednotkou do palubnéhopo íta a pri dosiahnutí kritickej hodnoty meranej veli iny, alebopri poruche senzorovej jednotky
SDO_SET_CONFIG Prenos konfigura ných parametrov senzorovej jednotky prikonfigurácii zariadenia z palubného po íta a
PDO_ACK Vyslanie potvrdenia prijatia komunika ného objektuSDO_SET_CONFIG senzorovou jednotkou
Dátové truktúry jednotlivých komunika ných objektov sú definované v prílohe 6.
ilinská univerzita v iline Diplomová prácaKatedra telekomunikácií––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––
________________________________________________________________________
62
6.3 Programové vybavenie procesora senzorovej jednotky
6.3.1 V eobecná truktúra firmvéru
Ke e jadrom ka dej senzorovej jednotky je mikroprocesor (PIC18F2580), je
zrejmé, e je potrebné definova jeho programové vybavenie - firmvér, vykonávaním
ktorého sa riadi innos celej senzorovej jednotky. V eobecnú truktúru algoritmu
firmvéru ukazuje vývojový diagram na obrázku 1 v prílohe 7.
Beh programu za ína po zapnutí napájania, prípadne po vykonaní príkazu
„RESET“ inicializáciou mikroprocesora. Nasleduje automatický test funk nosti
senzorovej jednotky. Výsledky testu sú spolu s ostatnými údajmi odoslané do palubného
po íta a vozidla.
V prípade, e je senzorová jednotka v poriadku, mikroprocesor prejde do stavu
akania na príkaz z palubného po íta a. Po prijatí príkazu, dôjde k overeniu i je príkaz
platný a následne je vykonaná akcia, ktorú príkaz po aduje napr. meranie snímanej
veli iny a odoslanie výsledku merania. V prípade, e senzorová jednotka vykazuje
v niektorom z testov chybu, senzorová jednotka opä odo le stavové a identifika né údaje
do palubného po íta a a prejde do stavu akania na príkaz z palubného po íta a. Jediný
príkaz na ktorý je senzorová jednotka schopná reagova je príkaz „RESET“.
6.3.2 Inicializácia
Vývojový diagram na obrázku 2 v prílohe 7 popisuje postupnos krokov, ktoré je
potrebné vykona na to aby senzorová jednotka bola po pripojení napájacieho napätia
prípadne po vykonaní príkazu „RESET“ uvedená do plne funk ného stavu a pripravená
vykonáva definované príkazy vysielané z palubného po íta a.
V jednotlivých krokoch treba vykona nasledovné úlohy:
• Definova vstupy, výstupy a ich stav na jednotlivých portoch mikrokontroléra
• Inicializova A/D prevodník
• Inicializova radi rozhrania CAN
• Inicializova subsystém preru ení
• Na íta konfigura né a kalibra né údaje z pamäte kon tánt.

ilinská univerzita v iline Diplomová prácaKatedra telekomunikácií––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––
________________________________________________________________________
63
6.3.3 Automatický test funk nosti
Automatický test funk nosti senzorovej jednotky sa skladá z dvoch astí, a to z
testu funk nosti CPU a testu funk nosti senzorových elementov.
Algoritmus testu funk nosti predstavuje vývojový diagram na obrázku 3 v prílohe 7.
Výsledky testov sú uchované ako logické hodnoty nasledujúcich návestí:
ROM_OK - výsledok testu neporu enosti obsahu pamäte programu
EEP_OK - výsledok testu neporu enosti obsahu konfigura nej pamäte
CPU_OK - výsledok testu funk nosti CPU
SENS_OK - výsledok testu senzorových elementov
UNIT_OK - výsledok testu senzorovej jednotky
Test funk nosti CPU pozostáva z nasledovných krokov:
Výpo et kontrolnej sumy obsahu pamäte programu a jeho porovnanie
s definovanou hodnotou. Kontrolná suma je vypo ítaná ako sú et modulo 2 obsahu
etkých pamä ových lokácií a na poslednú, na ktorej sa nachádza hodnota kontrolnej
sumy vypo ítaná v priebehu kompilácie zdrojových textov firmvéru. Výsledok s ítania
modulo 2 sa následne porovná s hodnotou ulo enou na poslednej pamä ovej lokácií.
Výsledok testu sa pova uje za kladný ak sa obe hodnoty rovnajú, a za záporný ak sa obe
hodnoty nerovnajú. Logická hodnota návestia ROM_OK sa nastaví pod a výsledku
predchádzajúceho testu. Hodnota TRUE zodpovedá kladnému výsledku testu.
Výpo et kontrolnej sumy pamäte konfigura ných kon tánt typu EEPROM:
Kontrolná suma je opä vypo ítaná ako sú et modulo 2 obsahu v etkých pamä ových
lokácií a na poslednú, na ktorej sa nachádza hodnota kontrolnej sumy vypo ítaná
v priebehu kompilácie zdrojových textov firmvéru, prípadne vypo ítaná samotným
firmvérom pri ukladaní zmien konfigurácie. Výsledok testu sa pova uje za kladný, ak sa
obe hodnoty rovnajú a za záporný, ak sa obe hodnoty nerovnajú.
Logická hodnota návestia EEP_OK sa nastaví pod a výsledku predchádzajúceho
testu. Hodnota TRUE zodpovedá kladnému výsledku testu.
Logická hodnota návestia CPU_OK sa nastaví pod a logických hodnôt návestí
ROM_OK a EEP_OK.
Pre logickú hodnotu návesti CPU_OK platí: CPU_OK = ROM_OK & EEP_OK
Po vykonaní testu funk nosti CPU nasleduje test funk nosti senzorových elementov.
ilinská univerzita v iline Diplomová prácaKatedra telekomunikácií––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––
________________________________________________________________________
64
7 Záver
Cie om diplomovej práce bolo o najkomplexnej ie analyzova problematiku
v oblasti zbernicových systémov cestných vozidiel a navrhnú najvhodnej ie rie enie pre
realizáciu senzorovej siete, prostredníctvom ktorej budú komunikova senzorové
jednotky s centrálnym palubným po íta om a informova ho o stave meranej veli iny.
Takýto senzorový systém nájde uplatnenie v ade tam, kde je treba nepret ite
monitorova stav nákladu, vozidla ale aj posádky. Ide hlavne o prepravu nebezpe ných
nákladov, cenných predmetov a pe azí. Predpokladom efektívnej kontroly takýchto
vozidiel je pou itie palubného po íta a s implementovaným telekomunika ným
satelitným modulom alebo GSM modulom, pomocou ktorého bude mo ná nepretr itá
komunikácia z doh adového alebo logistického centra. Pou itím GPS modulu bude
naviac mo ná aj presná lokalizácia vozidla.
Ke e obdobné projekty sú v sú asnosti vyvíjané na celom svete, je nutné za
pracova na medzinárodnom tadnarde, ktorý bude definova komunika né vrstvy
senzorovej siete. Základom takéhoto tandardu by mohla by zbernica CAN-Bus a jej
protokol aplika nej vrstvy CANopen, ktorý je u medzinárodne tandardizovaný
organizáciou CiA.
Tie si treba uvedomi , e senzory musia by montované u pri výrobe vozidla,
z oho výplýva nutnos spolupráce s výrobcami automobilov.
Bez medzinárodnej koordinácie, za lenenia iných paralelne vyvíjaných projektov
a úzkej spolupráce s výrobcami automobilov nie je mo né vyvíjané projekty úspe ne
aplikova do vozidiel a zefektívni tak cestnú prepravu.
ilinská univerzita v iline Diplomová prácaKatedra telekomunikácií––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––
________________________________________________________________________
65
Zoznam pou itej literatúry
[1] o, S., Kreidl, M.: Senzory a m icí obvody, u ebný text, vydavate stvo VUT
Praha, 1996, ISBN 80-01-01500-9.
[2] Zehnula, K.: idla robot , SNTL – vydavate stvo technickej literatúry, Praha,
1990, ISBN 80-03-00563-9.
[3] ápová, K., áp, I.: Senzory v biomedicínskom in inierstve, u ebný text, EDIS
vydavate stvo ilinskej univerzity v iline, 1999, ISBN 80-7100-647-5.
[4] Siemens, Sensor technology, BERO-Sensorik für die Automatisierung, katalóg
senzorov pre automatizáciu, 2004.
[5] CAN in Automation, CAN specification 2.0, Part B, Am Weichselgarten 26, D-
91058 Erlangen
[6] Safe-by-Wire Plus, Automotive Safety Restraints Bus Specification Version 2.0,
2004
[7] CAN in Autonation (CiA), Cabling and connector pin assignment, Version 1.3,
Draft Recommendation 303-1, 2004
[8] Berwanger, J., Peller, M., Griessbach, R.: Byteflight - A New High-Performance
Data Bus System for Safety-Related Applications, Development Safety Systems
Electronics, BMW AG, Munich, Germany
[9] Lacko, .: Inteligentné systémy moderného automobilu, lánok asopisu PC
SPACE, íslo 2/2004.
[10] Lacko, .: Po íta ový systém moderného automobilu - Zbernica CAN a jej
vyu itie, lánok asopisu PC REVUE, íslo 7/2005.
[11] ISO-11898, Road Vehicles - Interchange of Digital Information, InternationalOrganization for Standardization.
ilinská univerzita v iline Diplomová prácaKatedra telekomunikácií––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––
________________________________________________________________________
66
Internet
[12] http://www.microchip.com
[13] http://www.telecom.gov.sk/index/go.php?id=1210
[14] http://www.turck.cz
[15] http://www.can-cia.org/
[16] http://www.canbus.us/
[17] http://www.kvaser.se
[18] http://www.semiconductors.philips.com/products/automotive/#CAN
[19] http://www.interfacebus.com/Design_Connector_Automotive.html
[20] http://www.byteflight.com/homepage.htm
[21] http://www.mjschofield.com/canworks.htm
[22] http://www.elektrorevue.cz/clanky/04012/
[23] http://www.elektrorevue.cz/clanky/03021/
[24] http://www.ceda.cz
[25] http://www.pp2can.wz.cz
[26] http://www.elbas.cz
[27] http://www.atmel.com/
[28] http://www.ti.com
[29] http://www.automotivedesignline.com/
[30] http://fieldbus.feld.cvut.cz/can/
[31] http://www.intrepidcs.com/vspy3/index.htm
[32] http://www.gemssensors.com/
[33] http://content.honeywell.com/sensing/solutions/markets/aobmrkt/index.stm
[34] http://alcor.sro.cz/c01fram.html
[35] http://www.smartec.nl/
[36] http://www.semiconductors.bosch.de/en/20/sensors/sensormodules.asp
[37] http://www.sensorsweb.com/car_sensors

ilinská univerzita v iline Diplomová prácaKatedra telekomunikácií––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––
________________________________________________________________________
67
ESTNÉ VYHLÁSENIE
Vyhlasujem, e som zadanú diplomovú prácu vypracoval samostatne, pod
odborným vedením vedúceho diplomovej práce doc. Ing. Martinom Vaculíkom, PhD.
a pou íval som len literatúru uvedenú v práci.
Súhlasím so zapo aním diplomovej práce.
V iline d a ..................................
podpis diplomanta
ilinská univerzita v iline Diplomová prácaKatedra telekomunikácií––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––
________________________________________________________________________
68
PO AKOVANIE
Touto cestou by som sa chcel po akova v etkým, ktorí mi pri tvorbe diplomovej
práce pomohli. Pánovi doc. Ing. Martinovi Vaculíkovi, PhD. akujem za cenné rady,
poskytnutie túdijného materiálu a jeho ochotu pomôc pri vypracovvaní tejto práce.
Takisto moja ve ká v aka smeruje k pánovi Ing. Martinovi Vestenickému za jeho cenné
rady. Moja v aka patrí aj rodi om a ich podpore môjho túdia.
ILINSKÁ UNIVERZITA V ILINEElektrotechnická fakultaKatedra telekomunikácií
INFORMA NÁ SIE VOZIDLA(Prílohová as )
Andrej KA OVSKÝ
2006

Zoznam príloh
PRÍLOHA 1 ...............................................................................Protokol zbernice CAN
PRÍLOHA 2 ...............................................Preh ad senzorov na monitorovanie nákladu
PRÍLOHA 3 ...................................Preh ad výrobcov mikroprocesorov s CAN radi om
PRÍLOHA 4 .................................................. Obvodové rie enie senzorových jednotiek
PRÍLOHA 5 ..........................................Komponenty na stavbu kabelá e zbernice CAN
PRÍLOHA 6 .......... truktúra protokolových objektov aplika nej vrstvy senzorovej siete
PRÍLOHA 7 .................................. Vývojové diagramy firmvéru senzorových jednotiek
ilinská univerzita v iline Diplomová prácaKatedra telekomunikácií Prílohová as––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––
________________________________________________________________________Príloha 1 Strana 1 z 18
PRÍLOHA 1: Protokol zbernice CAN
V sú asnosti platná verzia pecifikácia protokolu CAN (CAN Bus Specification
Version 2.0) vydaná firmou Robert BOSCH sa delí na dve asti:
• as A (Part A) : popisuje formát správy protokolu CAN ako bol definovaný
v CAN pecifikácií 1.2
• as B (Part B) : Zavádza pojem tandardný a roz írený formát správy, ktoré sa
navzájom lí ia v d ke identifikátora správy (11 bitov– tandardný, 29 bitov -
roz írený
pecifikácia protokolu CAN verzia 2.0 je medzinárodne normalizovaná normou
ISO 11898. [11]
Norma ISO 11898 pozostáva zo tyroch astí:
• ISO/DIS 11898 as 1. : Definuje CAN protokol, vrstvu dátového spoja a fyzickú
vrstvu
• ISO/DIS 11898 as 2. : pecifikuje vysoko rýchlostnú fyzickú vrstvu (bez
chybovej tolerancie) zbernice CAN - BUS
• ISO/CD 11898 as 3. : Popisuje nízko rýchlostnú fyzickú vrstvu (s chybovou
toleranciou) zbernice CAN - BUS
• ISO/CD 11898 as 4. : pecifikuje asovo spú aný komunika ný protokol pre
zbernicu CAN – BUS (Time-Triggered CAN protocol).
Okrem uvedenej pecifikácie sú v sú asnosti tandardizované aj niektoré protokoly
vy ích vrstiev (Higher Layer Protocol- alej len HLP) zbernice CAN:
• ISO 17356: HLP OSEK pre automobilové aplikácie.
• EN 50325-4: HLP CANopen aplika ná vrstva a komunika né profily
• EN 50325-2: HLP DeviceNet ur ený pre priemyselnú automatizáciu
• EN 50325-3: HLP SDS (Smart Distributed Systems)
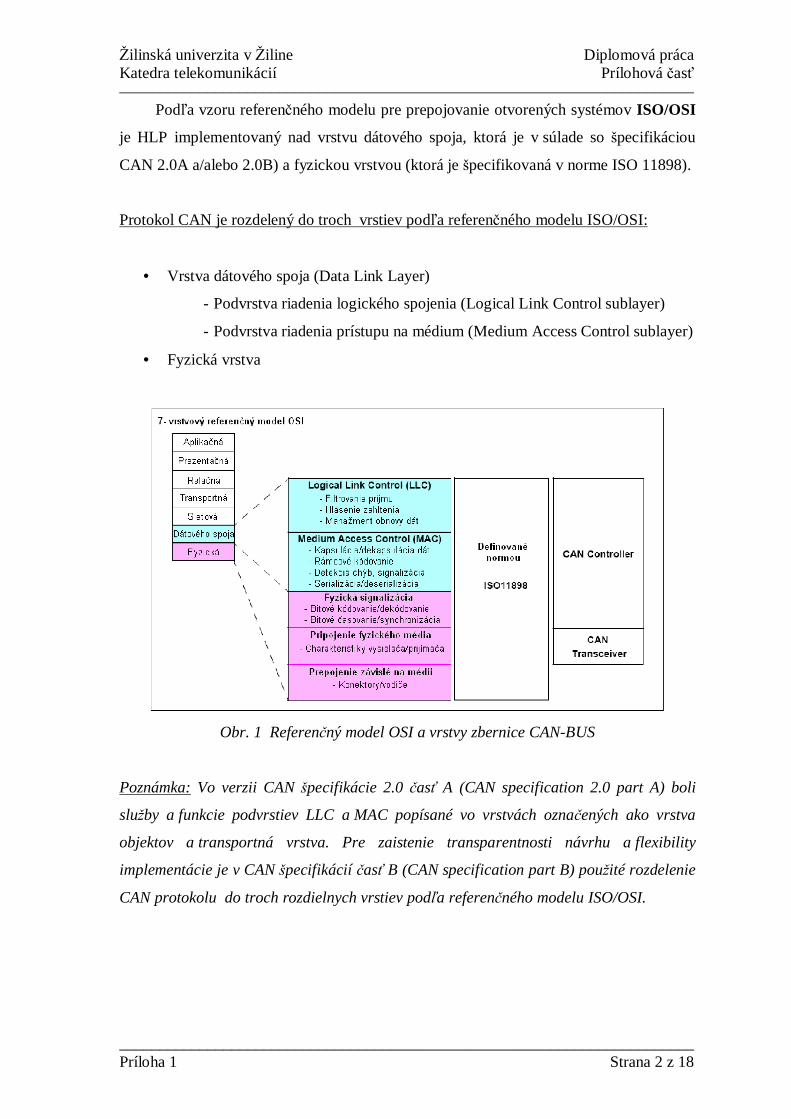
ilinská univerzita v iline Diplomová prácaKatedra telekomunikácií Prílohová as––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––
________________________________________________________________________Príloha 1 Strana 2 z 18
Pod a vzoru referen ného modelu pre prepojovanie otvorených systémov ISO/OSI
je HLP implementovaný nad vrstvu dátového spoja, ktorá je v súlade so pecifikáciou
CAN 2.0A a/alebo 2.0B) a fyzickou vrstvou (ktorá je pecifikovaná v norme ISO 11898).
Protokol CAN je rozdelený do troch vrstiev pod a referen ného modelu ISO/OSI:
• Vrstva dátového spoja (Data Link Layer)
- Podvrstva riadenia logického spojenia (Logical Link Control sublayer)
- Podvrstva riadenia prístupu na médium (Medium Access Control sublayer)
• Fyzická vrstva
Obr. 1 Referen ný model OSI a vrstvy zbernice CAN-BUS
Poznámka: Vo verzii CAN pecifikácie 2.0 as A (CAN specification 2.0 part A) boli
slu by a funkcie podvrstiev LLC a MAC popísané vo vrstvách ozna ených ako vrstva
objektov a transportná vrstva. Pre zaistenie transparentnosti návrhu a flexibility
implementácie je v CAN pecifikácií as B (CAN specification part B) pou ité rozdelenie
CAN protokolu do troch rozdielnych vrstiev pod a referen ného modelu ISO/OSI.

ilinská univerzita v iline Diplomová prácaKatedra telekomunikácií Prílohová as––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––
________________________________________________________________________Príloha 1 Strana 3 z 18
CAN protokol má nasledovné vlastnosti:
• prioritizáciu správ
• garantovanie oneskorenia
• konfigurácia flexibility
• vysielanie a príjem s asovou synchronizáciou
• systém irokej dátovej neporu enosti
• mo nos multi-master
• detekciu chýb a chybovú signalizáciu
• automatické znovuvyslanie po kodenej správy hne ako je zbernica opä vo ná
• rozdiel medzi do asnými chybami a permanentnými zlyhaniami uzlov
a samostatné vypínanie po kodených uzlov.
CAN fyzická vrstva
Úlohou fyzickej vrstvy je vlastný prenos jednotlivých bitov medzi jednotlivými
uzlami s re pektovaním v etkých elektrických vlastností. Vo vnútri jednej siete má
fyzická vrstva rovnaké parametre pre v etky uzly, av ak je mo né zvoli si jej parametre
tak, aby o najlep ie vyhovovali danej aplikácií.
Bitové kódovanie
Pre zbernicu CAN bolo zvolené bitové kódovanie kódom bez návratu k nule
(Non-Return-to-Zero), pre ktorý je charakteristické, e úrove signálu zostáva kon tantná
po as trvania jedného bitu a tak je nutný iba jeden asový slot na reprezentáciu bitu.
Pou itie kódovania NRZ zaru uje celistvos dát s minimálnymi odrazmi a vysokú
odolnos vo i vonkaj iemu ru eniu. V prípade, e za sebou nasleduje viac bitov rovnakej
logickej úrovne (napr. 1 1 1 ) zostáva úrove signálu kon tantná celý as trvania týchto
bitov. Preto je nutné zavies mechanizmus sledovania maximálneho prípustného intervalu
trvania jednej logickej úrovne. Toto je dôle ité aj pre synchronizáciu. Pre tento ú el bol
zavedení mechanizmus dop ania bitov (Bit Stuffing), ktorý dop a komplementárny bit
(bit opa nej logickej úrovne), v dy po piatich po sebe idúcich bitoch rovnakej logickej
úrovne. Na strane prijíma a sa vlo ený bit opä „vytiahne“ a tak sa získa pôvodný signál.
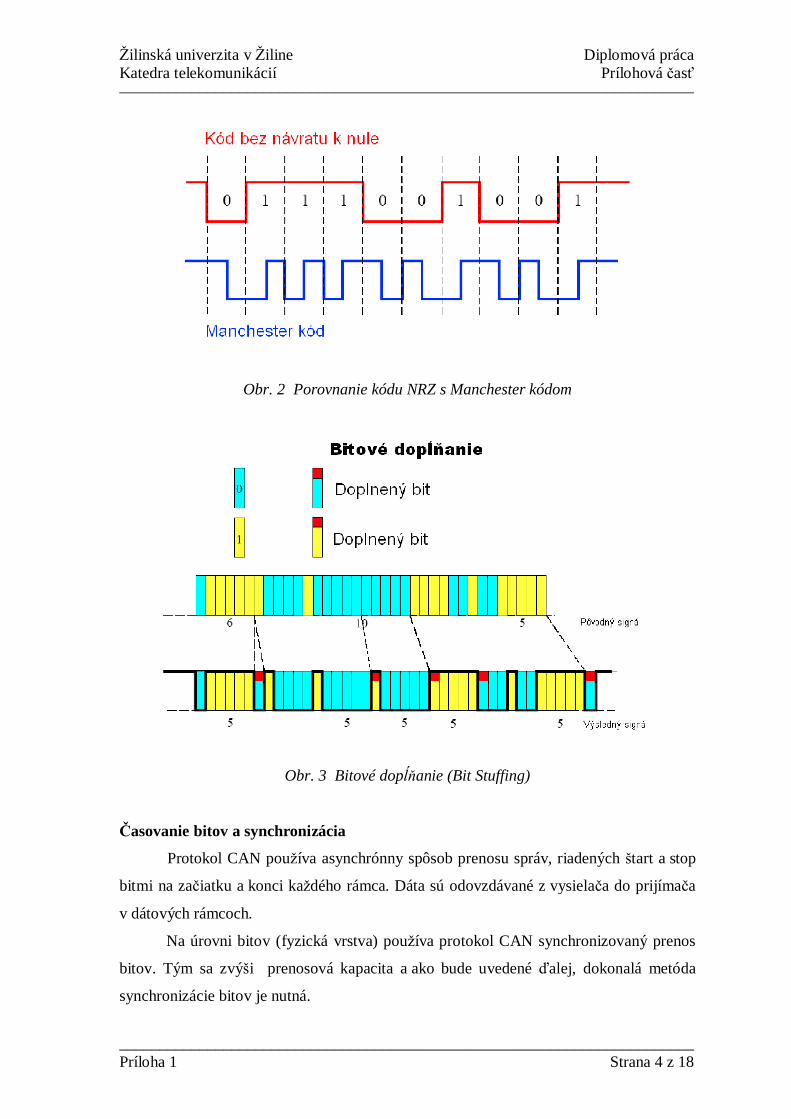
ilinská univerzita v iline Diplomová prácaKatedra telekomunikácií Prílohová as––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––
________________________________________________________________________Príloha 1 Strana 4 z 18
Obr. 2 Porovnanie kódu NRZ s Manchester kódom
Obr. 3 Bitové dop anie (Bit Stuffing)
asovanie bitov a synchronizácia
Protokol CAN pou íva asynchrónny spôsob prenosu správ, riadených tart a stop
bitmi na za iatku a konci ka dého rámca. Dáta sú odovzdávané z vysiela a do prijíma a
v dátových rámcoch.
Na úrovni bitov (fyzická vrstva) pou íva protokol CAN synchronizovaný prenos
bitov. Tým sa zvý i prenosová kapacita a ako bude uvedené alej, dokonalá metóda
synchronizácie bitov je nutná.
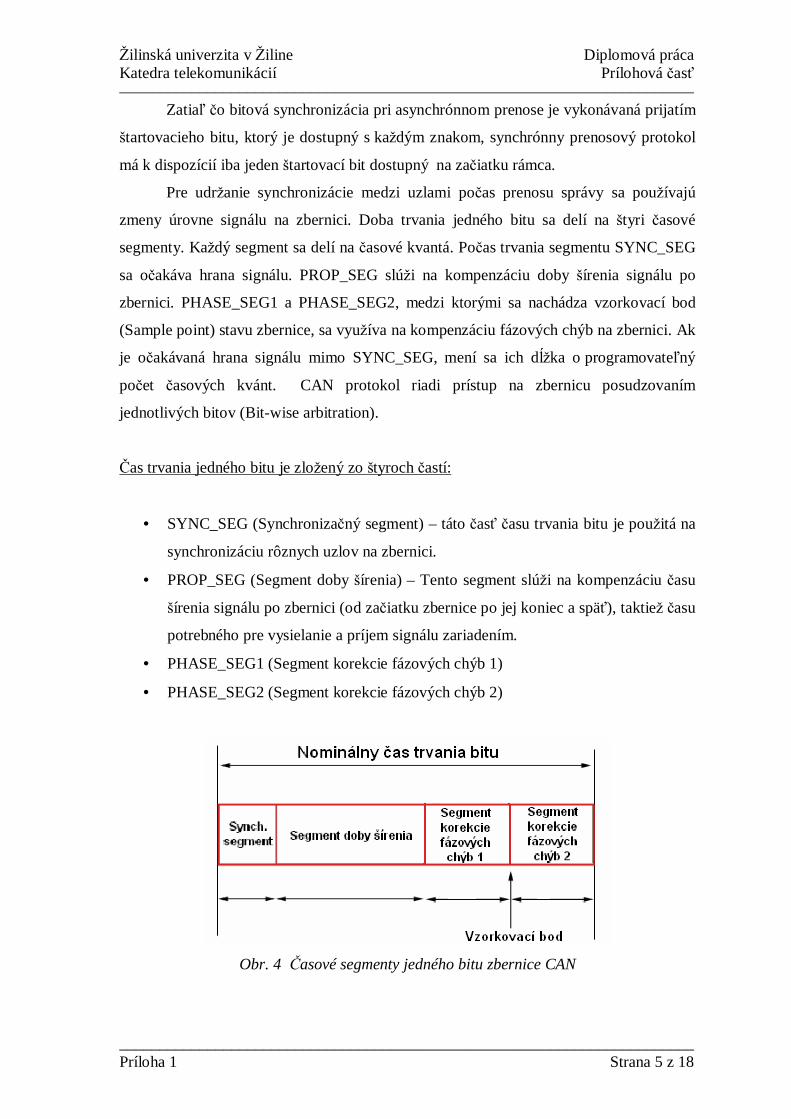
ilinská univerzita v iline Diplomová prácaKatedra telekomunikácií Prílohová as––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––
________________________________________________________________________Príloha 1 Strana 5 z 18
Zatia o bitová synchronizácia pri asynchrónnom prenose je vykonávaná prijatím
tartovacieho bitu, ktorý je dostupný s ka dým znakom, synchrónny prenosový protokol
má k dispozícií iba jeden tartovací bit dostupný na za iatku rámca.
Pre udr anie synchronizácie medzi uzlami po as prenosu správy sa pou ívajú
zmeny úrovne signálu na zbernici. Doba trvania jedného bitu sa delí na tyri asové
segmenty. Ka dý segment sa delí na asové kvantá. Po as trvania segmentu SYNC_SEG
sa o akáva hrana signálu. PROP_SEG slú i na kompenzáciu doby írenia signálu po
zbernici. PHASE_SEG1 a PHASE_SEG2, medzi ktorými sa nachádza vzorkovací bod
(Sample point) stavu zbernice, sa vyu íva na kompenzáciu fázových chýb na zbernici. Ak
je o akávaná hrana signálu mimo SYNC_SEG, mení sa ich d ka o programovate ný
po et asových kvánt. CAN protokol riadi prístup na zbernicu posudzovaním
jednotlivých bitov (Bit-wise arbitration).
as trvania jedného bitu je zlo ený zo tyroch astí:
• SYNC_SEG (Synchroniza ný segment) – táto as asu trvania bitu je pou itá na
synchronizáciu rôznych uzlov na zbernici.
• PROP_SEG (Segment doby írenia) – Tento segment slú i na kompenzáciu asu
írenia signálu po zbernici (od za iatku zbernice po jej koniec a spä ), taktie asu
potrebného pre vysielanie a príjem signálu zariadením.
• PHASE_SEG1 (Segment korekcie fázových chýb 1)
• PHASE_SEG2 (Segment korekcie fázových chýb 2)
Obr. 4 asové segmenty jedného bitu zbernice CAN
ilinská univerzita v iline Diplomová prácaKatedra telekomunikácií Prílohová as––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––
________________________________________________________________________Príloha 1 Strana 6 z 18
Nominálny as bitu: Za ideálnych podmienok ho mô eme ur ako 1/prenosová rýchlos
Vzorkovací bod (Sample point): je to asový okamih, kedy je uzlom ítaná úrove na
zbernici a interpretovaná ako logická úrove prená aného bitu.
asové kvantum (Time quantum): Je pevná asová jednotka získaná delením periódy
oscilátora. Delenie je realizované programovým deli om ako celo íselný podiel v rozsahu
1 a 32.
asové segmenty bitu mô u nadobúda tieto asové d ky:
• Synchroniza ný segment – je dlhý 1 asové kvantum
• Segment doby írenia – je programovo nastavite ný na d ku 1 a 8 asových
kvánt
• Segment korekcie fázových chýb 1 – je programovo nastavite ný na d ku 1 a 8
asových kvánt
• Segment korekcie fázových chýb 2 – je maximálne dlhý ako segment stavového
zásobníka 1
Celkový po et asových kvánt po as trvania jedného bitu mô e by programovo
stanovený v rozsahu celých ísel od 8 do 25.
Na zbernici CAN rozoznávame dva odli né typy synchronizácie:
• Tvrdá synchronizácia (Hard synchronization) na za iatku ka dého rámca
• Resynchronizácia (Resynchronization) po as trvania rámca
Po tvrdej synchronizácií je as bitu re tartovaný na koniec synchroniza ného
segmentu, preto e hrana, ktorá spôsobila tvrdú synchronizáciu, le í v synchroniza nom
segmente re tartovaného bitu.
Resynchronizácia skracuje alebo predl uje as trvania bitu a to tak, e vzorkovací bod je
posúvaný pod a detekovanej hrany.
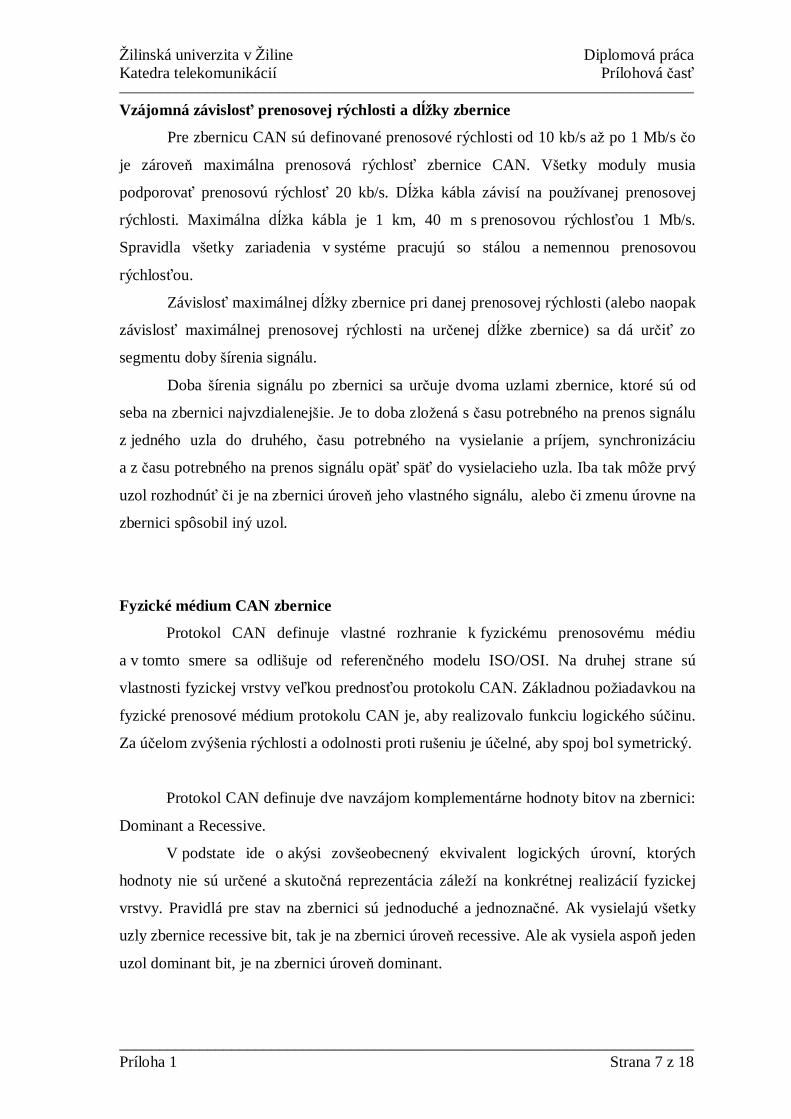
ilinská univerzita v iline Diplomová prácaKatedra telekomunikácií Prílohová as––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––
________________________________________________________________________Príloha 1 Strana 7 z 18
Vzájomná závislos prenosovej rýchlosti a d ky zbernice
Pre zbernicu CAN sú definované prenosové rýchlosti od 10 kb/s a po 1 Mb/s o
je zárove maximálna prenosová rýchlos zbernice CAN. V etky moduly musia
podporova prenosovú rýchlos 20 kb/s. D ka kábla závisí na pou ívanej prenosovej
rýchlosti. Maximálna d ka kábla je 1 km, 40 m s prenosovou rýchlos ou 1 Mb/s.
Spravidla v etky zariadenia v systéme pracujú so stálou a nemennou prenosovou
rýchlos ou.
Závislos maximálnej d ky zbernice pri danej prenosovej rýchlosti (alebo naopak
závislos maximálnej prenosovej rýchlosti na ur enej d ke zbernice) sa dá ur zo
segmentu doby írenia signálu.
Doba írenia signálu po zbernici sa ur uje dvoma uzlami zbernice, ktoré sú od
seba na zbernici najvzdialenej ie. Je to doba zlo ená s asu potrebného na prenos signálu
z jedného uzla do druhého, asu potrebného na vysielanie a príjem, synchronizáciu
a z asu potrebného na prenos signálu opä spä do vysielacieho uzla. Iba tak mô e prvý
uzol rozhodnú i je na zbernici úrove jeho vlastného signálu, alebo i zmenu úrovne na
zbernici spôsobil iný uzol.
Fyzické médium CAN zbernice
Protokol CAN definuje vlastné rozhranie k fyzickému prenosovému médiu
a v tomto smere sa odli uje od referen ného modelu ISO/OSI. Na druhej strane sú
vlastnosti fyzickej vrstvy ve kou prednos ou protokolu CAN. Základnou po iadavkou na
fyzické prenosové médium protokolu CAN je, aby realizovalo funkciu logického sú inu.
Za ú elom zvý enia rýchlosti a odolnosti proti ru eniu je ú elné, aby spoj bol symetrický.
Protokol CAN definuje dve navzájom komplementárne hodnoty bitov na zbernici:
Dominant a Recessive.
V podstate ide o akýsi zov eobecnený ekvivalent logických úrovní, ktorých
hodnoty nie sú ur ené a skuto ná reprezentácia zále í na konkrétnej realizácií fyzickej
vrstvy. Pravidlá pre stav na zbernici sú jednoduché a jednozna né. Ak vysielajú v etky
uzly zbernice recessive bit, tak je na zbernici úrove recessive. Ale ak vysiela aspo jeden
uzol dominant bit, je na zbernici úrove dominant.
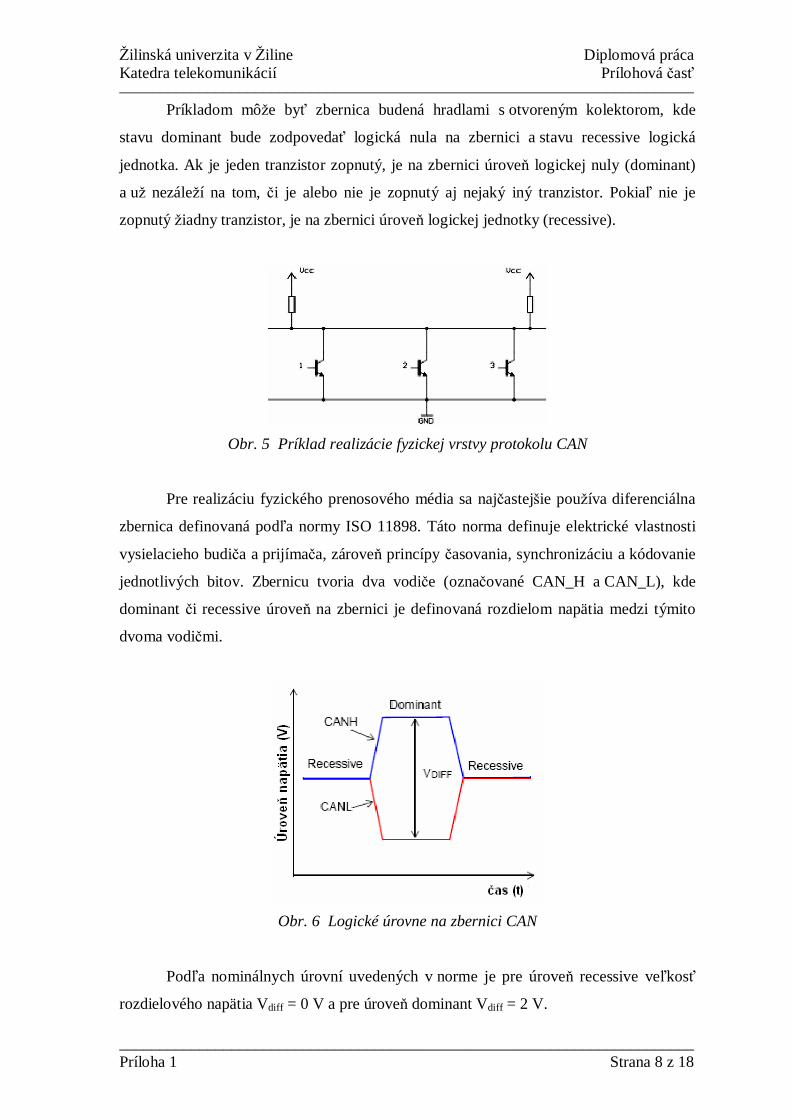
ilinská univerzita v iline Diplomová prácaKatedra telekomunikácií Prílohová as––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––
________________________________________________________________________Príloha 1 Strana 8 z 18
Príkladom mô e by zbernica budená hradlami s otvoreným kolektorom, kde
stavu dominant bude zodpoveda logická nula na zbernici a stavu recessive logická
jednotka. Ak je jeden tranzistor zopnutý, je na zbernici úrove logickej nuly (dominant)
a u nezále í na tom, i je alebo nie je zopnutý aj nejaký iný tranzistor. Pokia nie je
zopnutý iadny tranzistor, je na zbernici úrove logickej jednotky (recessive).
Obr. 5 Príklad realizácie fyzickej vrstvy protokolu CAN
Pre realizáciu fyzického prenosového média sa naj astej ie pou íva diferenciálna
zbernica definovaná pod a normy ISO 11898. Táto norma definuje elektrické vlastnosti
vysielacieho budi a a prijíma a, zárove princípy asovania, synchronizáciu a kódovanie
jednotlivých bitov. Zbernicu tvoria dva vodi e (ozna ované CAN_H a CAN_L), kde
dominant i recessive úrove na zbernici je definovaná rozdielom napätia medzi týmito
dvoma vodi mi.
Obr. 6 Logické úrovne na zbernici CAN
Pod a nominálnych úrovní uvedených v norme je pre úrove recessive ve kos
rozdielového napätia Vdiff = 0 V a pre úrove dominant Vdiff = 2 V.
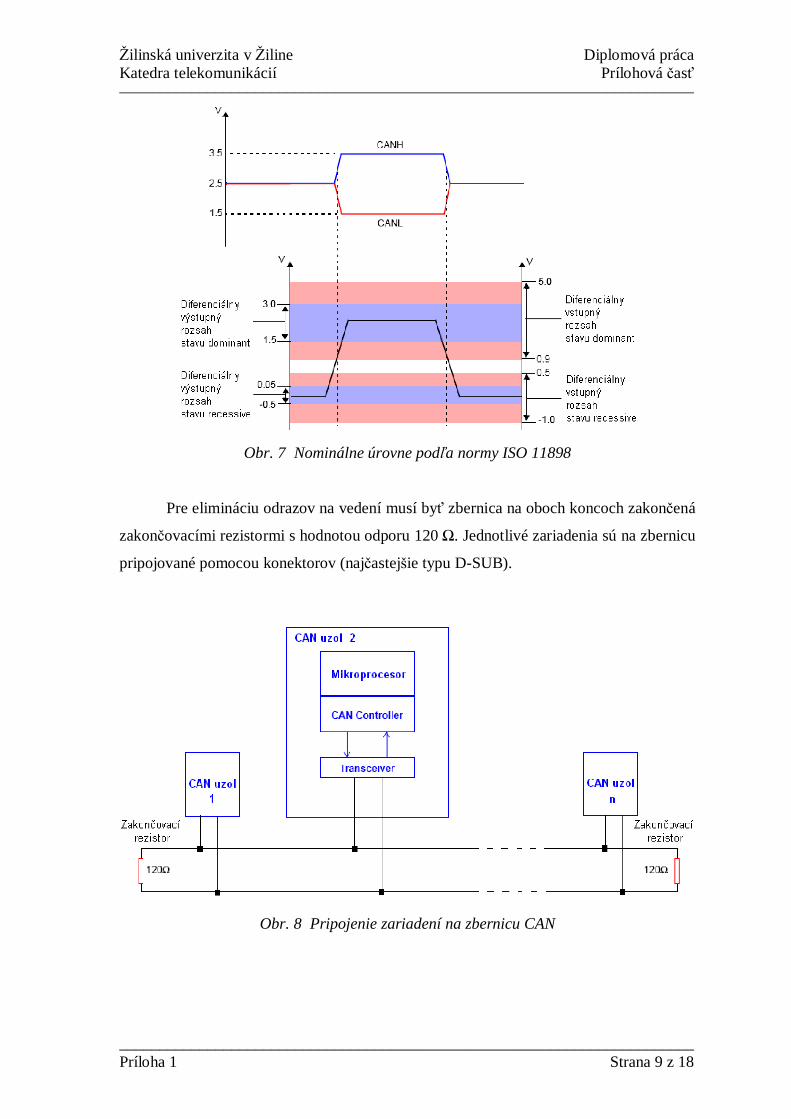
ilinská univerzita v iline Diplomová prácaKatedra telekomunikácií Prílohová as––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––
________________________________________________________________________Príloha 1 Strana 9 z 18
Obr. 7 Nominálne úrovne pod a normy ISO 11898
Pre elimináciu odrazov na vedení musí by zbernica na oboch koncoch zakon ená
zakon ovacími rezistormi s hodnotou odporu 120 . Jednotlivé zariadenia sú na zbernicu
pripojované pomocou konektorov (naj astej ie typu D-SUB).
Obr. 8 Pripojenie zariadení na zbernicu CAN
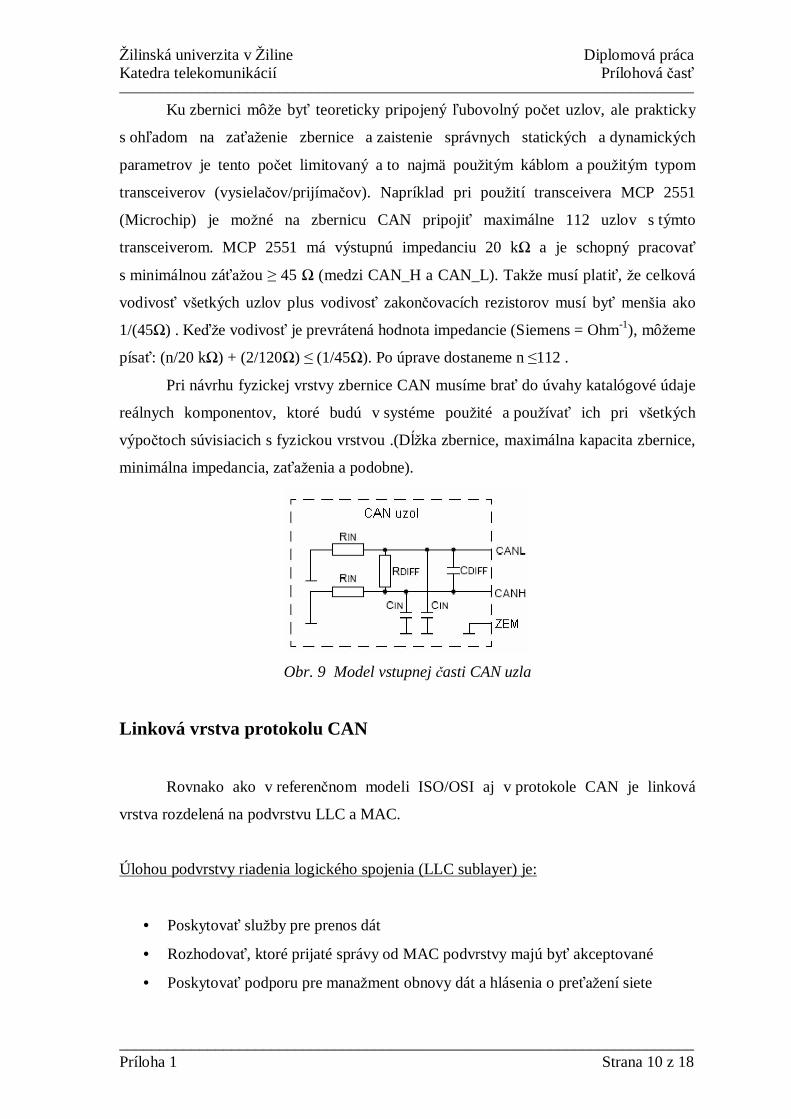
ilinská univerzita v iline Diplomová prácaKatedra telekomunikácií Prílohová as––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––
________________________________________________________________________Príloha 1 Strana 10 z 18
Ku zbernici mô e by teoreticky pripojený ubovolný po et uzlov, ale prakticky
s oh adom na za enie zbernice a zaistenie správnych statických a dynamických
parametrov je tento po et limitovaný a to najmä pou itým káblom a pou itým typom
transceiverov (vysiela ov/prijíma ov). Napríklad pri pou ití transceivera MCP 2551
(Microchip) je mo né na zbernicu CAN pripoji maximálne 112 uzlov s týmto
transceiverom. MCP 2551 má výstupnú impedanciu 20 k a je schopný pracova
s minimálnou zá ou 45 (medzi CAN_H a CAN_L). Tak e musí plati , e celková
vodivos v etkých uzlov plus vodivos zakon ovacích rezistorov musí by men ia ako
1/(45 ) . Ke e vodivos je prevrátená hodnota impedancie (Siemens = Ohm-1), mô eme
písa : (n/20 k ) + (2/120 ) (1/45 ). Po úprave dostaneme n 112 .
Pri návrhu fyzickej vrstvy zbernice CAN musíme bra do úvahy katalógové údaje
reálnych komponentov, ktoré budú v systéme pou ité a pou íva ich pri v etkých
výpo toch súvisiacich s fyzickou vrstvou .(D ka zbernice, maximálna kapacita zbernice,
minimálna impedancia, za enia a podobne).
Obr. 9 Model vstupnej asti CAN uzla
Linková vrstva protokolu CAN
Rovnako ako v referen nom modeli ISO/OSI aj v protokole CAN je linková
vrstva rozdelená na podvrstvu LLC a MAC.
Úlohou podvrstvy riadenia logického spojenia (LLC sublayer) je:
• Poskytova slu by pre prenos dát
• Rozhodova , ktoré prijaté správy od MAC podvrstvy majú by akceptované
• Poskytova podporu pre mana ment obnovy dát a hlásenia o pre ení siete
ilinská univerzita v iline Diplomová prácaKatedra telekomunikácií Prílohová as––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––
________________________________________________________________________Príloha 1 Strana 11 z 18
Podvrstva riadenia prístupu na médium (MAC sublayer) reprezentuje jadro CAN
protokolu. Jej úlohou je predov etkým prezentova správy prijaté od podvrstvy LLC
fyzickej vrstve a rozhodova o akceptácií správ prijatých od fyzickej vrstvy a ich
poskytnutie podvrstve LLC. MAC podvrstva je zodpovedná za riadenie rámcov,
posudzovanie potvrdenia prijímu, kontrolu chýb a signalizáciu chýb. Vo vnútri podvrstvy
MAC je rozhodnuté, i je zbernica vo ná pre nový prenos dát i naopak na ich príjem. Na
podvrstvu MAC dohliada entita mana mentu nazvaná chybové obmedzenie (Fault
Confinement), ktorá sama kontroluje zariadenie a rozli uje charakteristické krátke
poruchy od permanentných porúch. Z uvedeného vyplýva, e vzh adom k povahe
podvrstvy MAC tu nie je iadny priestor pre jej modifikáciu zo strany u ívate a.
Riadenie prístupu na prenosové médium a rie enie kolízií
Vzh adom na to, e sa jedná o sie typu multi-master, ka dý z ú astníkov mô e
zaháji vysielanie, akonáhle je pripravený a sie je v k udovom stave (Bus-Free). Platí tu
to isté pravidlo ako pri sie ach typu Ethernet, „kto za ne skôr ten vysiela“. Ostatný mô u
vysiela a potom, o je správa odvysielaná. Výnimku tvoria chybové rámce, ktoré sa
dajú vysiela okam ite po identifikovaní chyby ktorýmko vek ú astníkom.
Ak zaháji vysielanie sú asne nieko ko uzlov (ako je to nazna ené na obrázku 3.11),
prístup na zbernicu získa ten, ktorý priná a správu s vy ou prioritou (ni ím
identifikátorom). Identifikátor je uvedený na za iatku správy. Ka dý vysiela porovnáva
hodnotu práve vysielaného bitu s hodnotou na zbernici a ak zistí, e na zbernici je iná
hodnota ako vysiela (jedinou mo nos ou je, e vysiela vysiela recessive bit a na zbernici
je úrove dominant), okam ite preru í al ie vysielanie. Tým je zaistené, e správa
s vy ou prioritou bude odoslaná prednostne a e nedôjde k jej po kodeniu, o by malo za
následok opakovanie správy a zbyto né pred enie doby potrebnej k prenosu správy.
Uzol, ktorý nezískal pri kolízií prístup na zbernicu musí po ka pokia bude zbernica
opä v stave Bus-Free a potom správu vysla znovu.
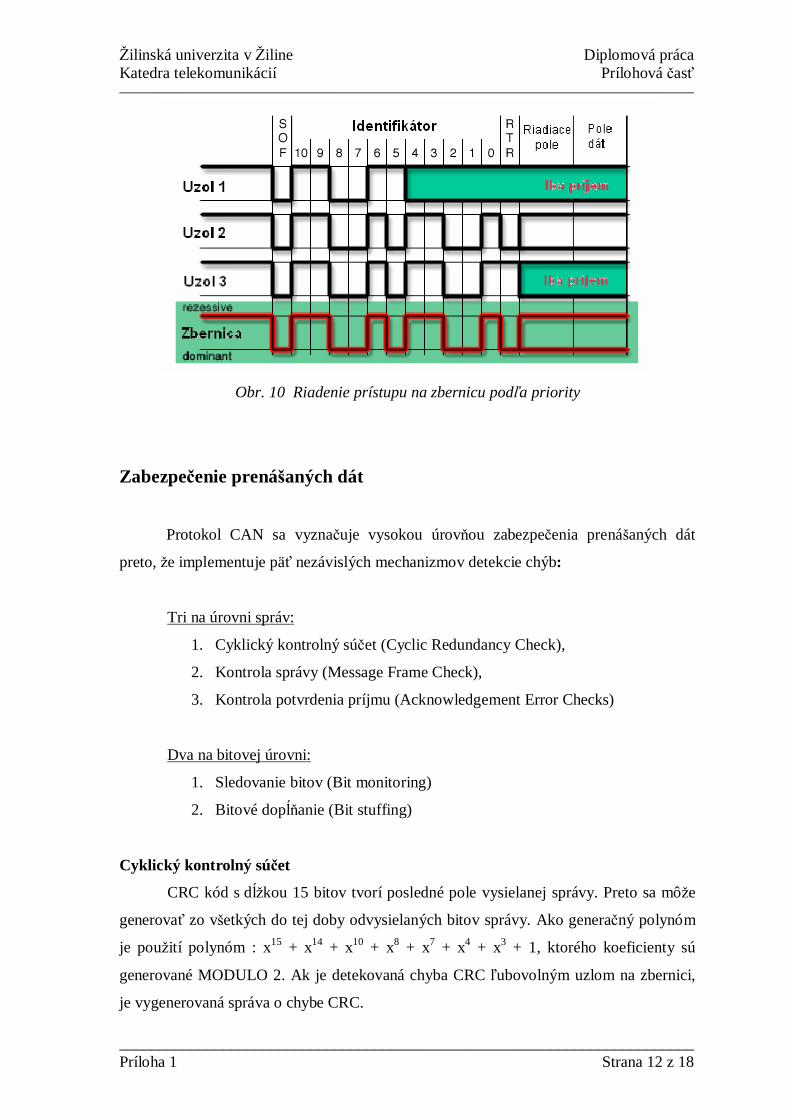
ilinská univerzita v iline Diplomová prácaKatedra telekomunikácií Prílohová as––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––
________________________________________________________________________Príloha 1 Strana 12 z 18
Obr. 10 Riadenie prístupu na zbernicu pod a priority
Zabezpe enie prená aných dát
Protokol CAN sa vyzna uje vysokou úrov ou zabezpe enia prená aných dát
preto, e implementuje pä nezávislých mechanizmov detekcie chýb:
Tri na úrovni správ:
1. Cyklický kontrolný sú et (Cyclic Redundancy Check),
2. Kontrola správy (Message Frame Check),
3. Kontrola potvrdenia príjmu (Acknowledgement Error Checks)
Dva na bitovej úrovni:
1. Sledovanie bitov (Bit monitoring)
2. Bitové dop anie (Bit stuffing)
Cyklický kontrolný sú et
CRC kód s d kou 15 bitov tvorí posledné pole vysielanej správy. Preto sa mô e
generova zo v etkých do tej doby odvysielaných bitov správy. Ako genera ný polynóm
je pou ití polynóm : x15 + x14 + x10 + x8 + x7 + x4 + x3 + 1, ktorého koeficienty sú
generované MODULO 2. Ak je detekovaná chyba CRC ubovolným uzlom na zbernici,
je vygenerovaná správa o chybe CRC.
ilinská univerzita v iline Diplomová prácaKatedra telekomunikácií Prílohová as––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––
________________________________________________________________________Príloha 1 Strana 13 z 18
Kontrola správy
Správa sa kontroluje pod a formátu uvedeného v pecifikácií a ak je na nejakej
pozícií bitu správy detekovaná nepovolená hodnota, je vygenerovaná správa o chybe
rámca (formátu správy).
Kontrola potvrdenia príjmu
Ak je správa v poriadku prijatá ubovolným uzlom, je to potvrdené zmenou
hodnoty jedného bitu správy (ACK bit). Vysiela v dy vysiela tento bit s úrov ou
recessive a ak detekuje úrove dominant, pri spätnom príjme, tak je v etko v poriadku.
Potvrdzovanie prijatia správy je realizované v etkými uzlami pripojenými k zbernici bez
oh adu na zapnuté i vypnuté filtrovanie správ (Acceptance Filtering).
Sledovanie bitov
Vysiela porovnáva vysielanú hodnotu bitu s úrov ou na zbernici. Ak sú obe
hodnoty rovnaké, vysiela pokra uje vo vysielaní. V prípade, e je na zbernici
detekovaná iná úrove ne zodpovedá vysielanému bitu a prebieha práve riadenie
prístupu na zbernicu (vysiela sa Arbitration Field), preru í sa vysielanie a prístup k médiu
získa uzol vysielajúci správu s vy ou prioritou. Pokia je rozdielnos vysielanej
a detekovanej úrovne zistená inde ne po as vysielania Arbitration Field a v potvrdení
prijatia správy (ACK Slot), je vygenerovaná správa o chybe bitu.
Bitové dop anie
Ak sa na zbernicu vysiela pä po sebe idúcich bitov rovnakej úrovne, je do správy
naviac vlo ený bit opa nej logickej úrovne. Toto rie enie slú i nie len na detekciu chýb,
ale tie na správne asové zosynchronizovanie prijíma ov jednotlivých uzlov. Ak je
detekovaná chyba vkladania bitov, je vygenerovaná správa o chybe vkladania bitov.
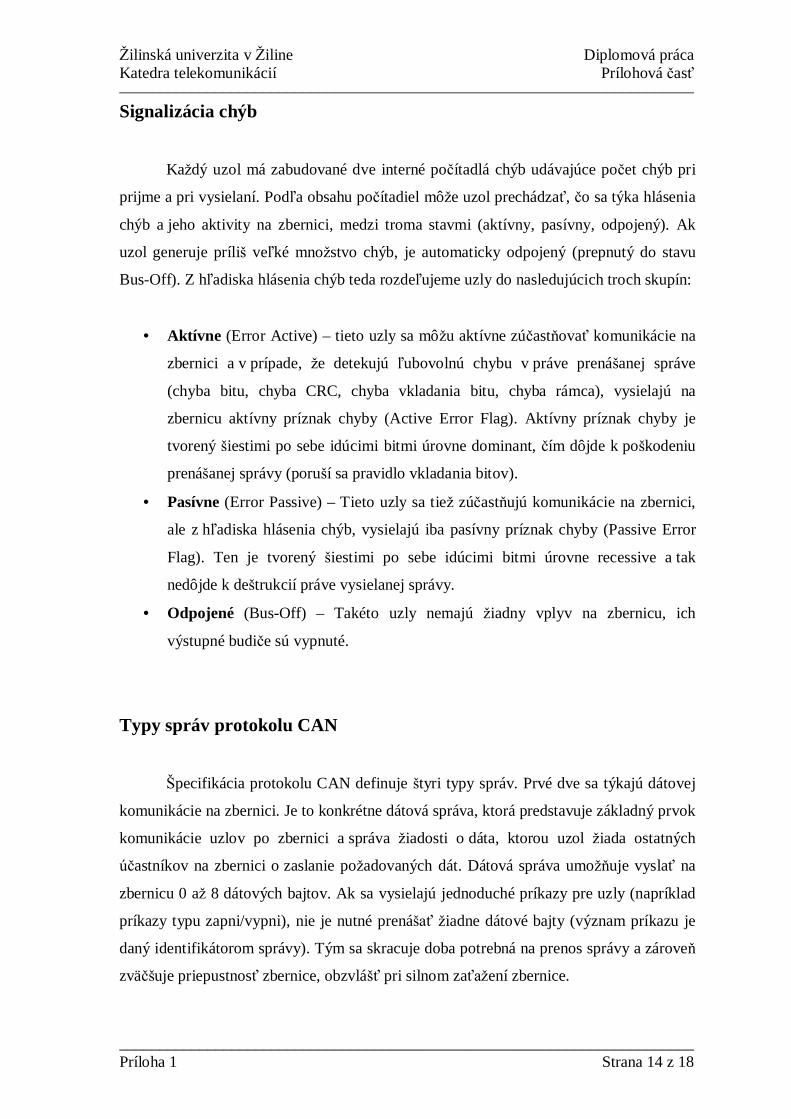
ilinská univerzita v iline Diplomová prácaKatedra telekomunikácií Prílohová as––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––
________________________________________________________________________Príloha 1 Strana 14 z 18
Signalizácia chýb
Ka dý uzol má zabudované dve interné po ítadlá chýb udávajúce po et chýb pri
prijme a pri vysielaní. Pod a obsahu po ítadiel mô e uzol prechádza , o sa týka hlásenia
chýb a jeho aktivity na zbernici, medzi troma stavmi (aktívny, pasívny, odpojený). Ak
uzol generuje príli ve ké mno stvo chýb, je automaticky odpojený (prepnutý do stavu
Bus-Off). Z h adiska hlásenia chýb teda rozde ujeme uzly do nasledujúcich troch skupín:
• Aktívne (Error Active) – tieto uzly sa mô u aktívne zú ast ova komunikácie na
zbernici a v prípade, e detekujú ubovolnú chybu v práve prená anej správe
(chyba bitu, chyba CRC, chyba vkladania bitu, chyba rámca), vysielajú na
zbernicu aktívny príznak chyby (Active Error Flag). Aktívny príznak chyby je
tvorený iestimi po sebe idúcimi bitmi úrovne dominant, ím dôjde k po kodeniu
prená anej správy (poru í sa pravidlo vkladania bitov).
• Pasívne (Error Passive) – Tieto uzly sa tie zú ast ujú komunikácie na zbernici,
ale z h adiska hlásenia chýb, vysielajú iba pasívny príznak chyby (Passive Error
Flag). Ten je tvorený iestimi po sebe idúcimi bitmi úrovne recessive a tak
nedôjde k de trukcií práve vysielanej správy.
• Odpojené (Bus-Off) – Takéto uzly nemajú iadny vplyv na zbernicu, ich
výstupné budi e sú vypnuté.
Typy správ protokolu CAN
pecifikácia protokolu CAN definuje tyri typy správ. Prvé dve sa týkajú dátovej
komunikácie na zbernici. Je to konkrétne dátová správa, ktorá predstavuje základný prvok
komunikácie uzlov po zbernici a správa iadosti o dáta, ktorou uzol iada ostatných
astníkov na zbernici o zaslanie po adovaných dát. Dátová správa umo uje vysla na
zbernicu 0 a 8 dátových bajtov. Ak sa vysielajú jednoduché príkazy pre uzly (napríklad
príkazy typu zapni/vypni), nie je nutné prená iadne dátové bajty (význam príkazu je
daný identifikátorom správy). Tým sa skracuje doba potrebná na prenos správy a zárove
zvä uje priepustnos zbernice, obzvlá pri silnom za ení zbernice.

ilinská univerzita v iline Diplomová prácaKatedra telekomunikácií Prílohová as––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––
________________________________________________________________________Príloha 1 Strana 15 z 18
Správa iadosti o dáta je vyslaná uzlom, ktorý po aduje zaslanie ur itých dát.
Odpove ou na túto po iadavku je odoslanie po adovaných dát uzlom, ktorý tieto dáta má
k dispozícií.
Posledné dva typy správ (chybová správa a správa o pre ení) slú ia k mana mentu
komunikácie po zbernici, konkrétne k signalizácií detekovaných chýb, eliminácií
chybových správ a vy iadanie pred enia v komunikácií.
Dátová správa (Data Frame)
Protokol CAN pou íva dva typy dátových správ. Prvý typ je definovaný CAN
pecifikáciou 2.0A a je ozna ovaný ako tandardný formát správy (Standard Data Frame),
zatia o CAN pecifikácia 2.0B definuje naviac roz írený formát správy (Extended Data
Frame). Jediný rozdiel medzi obidvoma formátmi je v d ke identifikátoru správy, ktorý
je 11 bitov pre tandardný formát a 29 bitov pre roz írený formát. Obidva typy správ
mô u by pou ívané na jednej zbernici, pokia je pou ívanými radi mi podporovaná
CAN pecifikácia 2.0B.
Vysielanie dátovej správy je mo né iba vtedy, ke je zbernica vo ná (Bus-Free).
Akonáhle uzol, ktorý má pripravenú správu na vysielanie, detekuje vo nú zbernicu,
za ína vysiela . i získa prístup na zbernicu alebo nie, zále í na mechanizme popísanom
vy ie.
Obr. 11 Dátová správa pod a CAN pecifikácie 2.0A
Význam jednotlivých astí dátovej správy pod a pecifikácie CAN 2.0A je nasledujúci:
• Za iatok správy (Start of Frame) – ozna uje za iatok dátového rámca
• Riadenie prístupu na zbernicu a identifikátor správy (Arbitration field) – stanovuje
prioritu dátového rámca a obsah správy

ilinská univerzita v iline Diplomová prácaKatedra telekomunikácií Prílohová as––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––
________________________________________________________________________Príloha 1 Strana 16 z 18
• RTR (Remote Request) – slú i na rozli ovanie i ide o dátovú správu (dominant)
alebo o správu iadosti o dáta (recessive)
• Riadiace pole (Control field) – obsahuje dva rezervované bity R0 a R1
a informácie o d ke dátovej správy
• Dátové pole (Data field) – v tomto poli sú prená ané informácie. Jeho d ka mô e
by 0 a 8 bajtov.
• po a kontrolného sú tu (CRC field) – slú i na zis ovanie chýb vzniknutých po as
prenosu pomocou cyklického redundantného kódu.
• Pole potvrdenie (ACK field) – Jeden bit signalizuje potvrdenie (ACK) a jeden bit
je oddelova (ACD). Prijíma pomocou tohto po a signalizuje vysiela u, e
správa bola úspe ne prijatá
• Koniec správy ( End of Frame) – Je definovaný ako 7 recessive bitov. Týmto
po om je dátový rámec ukon ený.
CAN pecifikácia 2.0B definuje dva formáty dátovej správy a to tandardný (Standard
Data Frame) a roz írený (Extended Data Frame)
tandardný formát správy: Je prevzatý z CAN pecifikácie 2.0A. Má d ku identifikátora
správy 11 bitov. Jediným rozdielom je vyu itie bitu R1 na indikáciu, i ide o rámec
tandardný alebo roz írený. Pod a CAN pecifikácie 2.0B sa tento bit ozna uje IDE
(Identifier Extended) a je dominant pre tandardný formát správy a recessive pre
roz írený formát správy. Z obrázku za iatku rámca je vidie , e riadenie prístupu na
zbernicu (priorita správy) je daná opä jedenástimi bitmi identifikátoru a hodnotou bitu
RTR (Remote Request).
Obr. 12 Za iatok tandardnej dátovej správy pod a pecifikácie 2.0B

ilinská univerzita v iline Diplomová prácaKatedra telekomunikácií Prílohová as––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––
________________________________________________________________________Príloha 1 Strana 17 z 18
Roz írený formát správy: Pou íva celkom 29 bitový identifikátor správy. Ten je
rozdelený do dvoch astí s d kami 11 bitov (rovnaký identifikátor je pou itý
v tandardnom formáte správy) a 18 bitov. Bit RTR (Remote Request) je tu nahradený
bitom SRR (Supstitute Remote Request), ktorý má v roz írenom formáte v dy hodnotu
recessive. Tým sa zabezpe í, aby pri vzájomnej kolízií tandardného a roz íreného
formátu správy na jednej zbernici s rovnakým 11 bitovým identifikátorom, získal
prednos tandardný rámec. Bit IDE (Identifier Extended) má v dy hodnotu recessive. Bit
(RTR) ur ujúci, i ide o dátovú správu alebo o správu iadosti o dáta je presunutý za
koniec druhej asti identifikátoru. Pre riadenie prístupu na médium je pou itých prvých
11 bitov identifikátora, SRR bit, IDE bit, ostatných 18 bitov identifikátora a bit RTR.
V tomto poradí je ur ovaná priorita správy.
Obr. 13 Za iatok roz írenej dátovej správy pod a CAN pecifikácie 2.0B
iados o dáta (Remote Frame)
Formát správy iadosti o dáta je podobný ako formát dátovej správy. Jediný
rozdiel je, e RTR bit (v poli riadenia prístupu na zbernicu) je nastavený na úrove
recessive a chýba dátová oblas . Ak nejaký uzol iada o zaslanie dát, nastaví taký
identifikátor správy, ako má dátová správa, ktorej zaslanie po aduje. Tým je zaistené, e
pokia v rovnakom okamihu jeden uzol iada o dáta a iný uzol dáta s rovnakým
identifikátorom vysiela, prednos v prístupe na zbernicu získa uzol vysielajúci dátovú
správu, lebo úrove RTR bitu dátovej správy je dominant a tak má táto správa vy iu
prioritu.
Správa o chybe (Error Frame)
Chybová správa slú i ku signalizácií chýb na zbernici CAN. Akonáhle ubovolný
uzol na zbernici detekuje v prená anej správe chybu (chyba bitu, chyba CRC, chyba
vkladania bitov, chyba rámca), vygeneruje ihne na zbernicu chybový rámec.
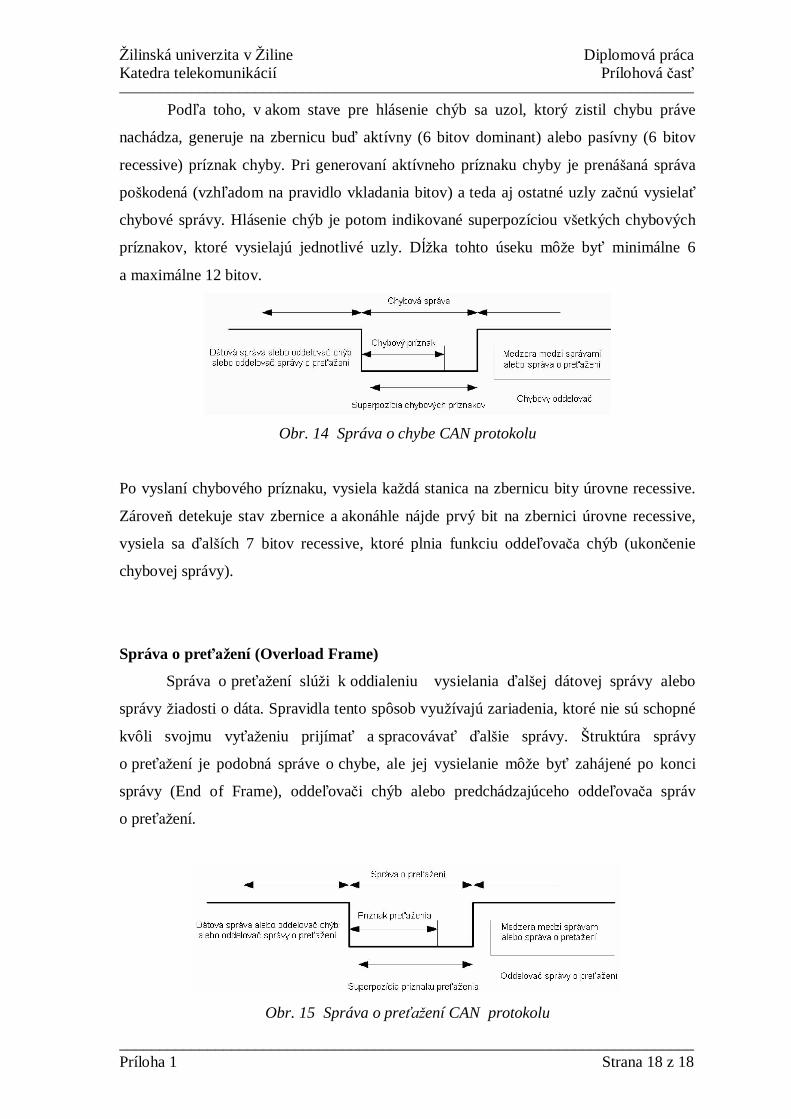
ilinská univerzita v iline Diplomová prácaKatedra telekomunikácií Prílohová as––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––
________________________________________________________________________Príloha 1 Strana 18 z 18
Pod a toho, v akom stave pre hlásenie chýb sa uzol, ktorý zistil chybu práve
nachádza, generuje na zbernicu bu aktívny (6 bitov dominant) alebo pasívny (6 bitov
recessive) príznak chyby. Pri generovaní aktívneho príznaku chyby je prená aná správa
po kodená (vzh adom na pravidlo vkladania bitov) a teda aj ostatné uzly za nú vysiela
chybové správy. Hlásenie chýb je potom indikované superpozíciou v etkých chybových
príznakov, ktoré vysielajú jednotlivé uzly. D ka tohto úseku mô e by minimálne 6
a maximálne 12 bitov.
Obr. 14 Správa o chybe CAN protokolu
Po vyslaní chybového príznaku, vysiela ka dá stanica na zbernicu bity úrovne recessive.
Zárove detekuje stav zbernice a akonáhle nájde prvý bit na zbernici úrovne recessive,
vysiela sa al ích 7 bitov recessive, ktoré plnia funkciu odde ova a chýb (ukon enie
chybovej správy).
Správa o pre ení (Overload Frame)
Správa o pre ení slú i k oddialeniu vysielania al ej dátovej správy alebo
správy iadosti o dáta. Spravidla tento spôsob vyu ívajú zariadenia, ktoré nie sú schopné
kvôli svojmu vy eniu prijíma a spracováva al ie správy. truktúra správy
o pre ení je podobná správe o chybe, ale jej vysielanie mô e by zahájené po konci
správy (End of Frame), odde ova i chýb alebo predchádzajúceho odde ova a správ
o pre ení.
Obr. 15 Správa o pre ení CAN protokolu

ilinská univerzita v iline Diplomová prácaKatedra telekomunikácií Prílohová as––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––
________________________________________________________________________Príloha 2 Strana 1 z 1
PRÍLOHA 2: Preh ad senzorov na monitorovanie nákladu
Typ senzoraTypové
ozna enie
Meraná
veli inaVýstup Internetová stránka produktu
Infra ervený SMTIR9902 Teplota zmena odporu http://www.smartec.nl/infrared_sensor.htm
Senzor teploty SMT160-30 Teplota CMOShttp://www.smartec.nl/temperature_sensor.ht
m
Senzory tlakuMPX2100
serieTlak 0mV do 40mV
http://www.chipdocs.com/datasheets/datashe
et-pdf/Motorola/MPX2100.html
Spína e hladiny
tekutinyELS serie
Hladina
tekutinyTTL/CMOS
http://www.gemssensors.com/electrooptical.
htm
Sníma hladiny
tekutinyULS-10
Hladina
tekutiny 4 mA do 20 mA
http://www.gemssensors.com/SpecTemplate
Custom.asp?nProductGroupID=10
Tenko vrstvovéseries 3000,
4000, 4700Tlak/Podtlak
4 mA a 20mA
alebo 0V a 10V
http://www.gemssensors.com/TOCResults.as
p?nContentsID=80
Piezorezonan néExOsense
serie
Úrove
hladinyel.prúd do 40 mA
http://www.gemssensors.com/SpecTemplate
Custom.asp?nProductGroupID=312
Induk né
Pod a
konkrétnej
aplikácie
Snímanie
kovových
predmetov
4 mA a 20mA
alebo 0V a 10V http://www.turck.cz/689.htm
KapacitnéBC3-S12-
AN6X
Snímanie
polohy
predmetov
spínací kontakt
alebo NPNhttp://www.turck.cz/689.htm
Optické
Pod a
konkrétnej
aplikácie
etky optické
aplikácie
4 mA a 20mA
alebo 0V a 10V http://www.turck.cz/689.htm
UltrazvukovéQ45ULIU64
ACRQ6
zmena polohy
objektov
4 mA a 20mA
alebo 0V a 10Vhttp://www.turck.cz/689.htm
Sníma e tlaku Rad PT-1 snímanie tlaku 4 mA a 20mA
alebo 0V a 10Vhttp://www.turck.cz/689.htm
Sníma e teploty
TS103A-
G1/8-
H1141-L034
snímanie
teplotyzmena odporu http://www.turck.cz/689.htm
Poznámka: Výber sp a po iadavku na napájacie napätie senzorov do +12 V
a po iadavky na prevádzku v cestných vozidlách.

ilinská univerzita v iline Diplomová prácaKatedra telekomunikácií Prílohová as––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––
________________________________________________________________________Príloha 3 Strana 1 z 1
PRÍLOHA 3: Preh ad mikroprocesorov s CAN radi om
VýrobcaTypová rada s CAN
radi om
Atmel AT90CAN32
Freescale Microcontrollers CAN
Fujitsu MB90xxx
Dallas Semiconductor DS80C390
Infineon XC886/888CLM
Inicore IniCAN
Intel 87C196CA/87C196CB
Maxim Integrated Product DS80C390
Microchip PIC18xxxxx
National Semiconductor CR16Mxxx
Philips Semiconductor P8xC592
Renesas Technology H8S/2615 Group
ST-Microelectronics ST72561xx
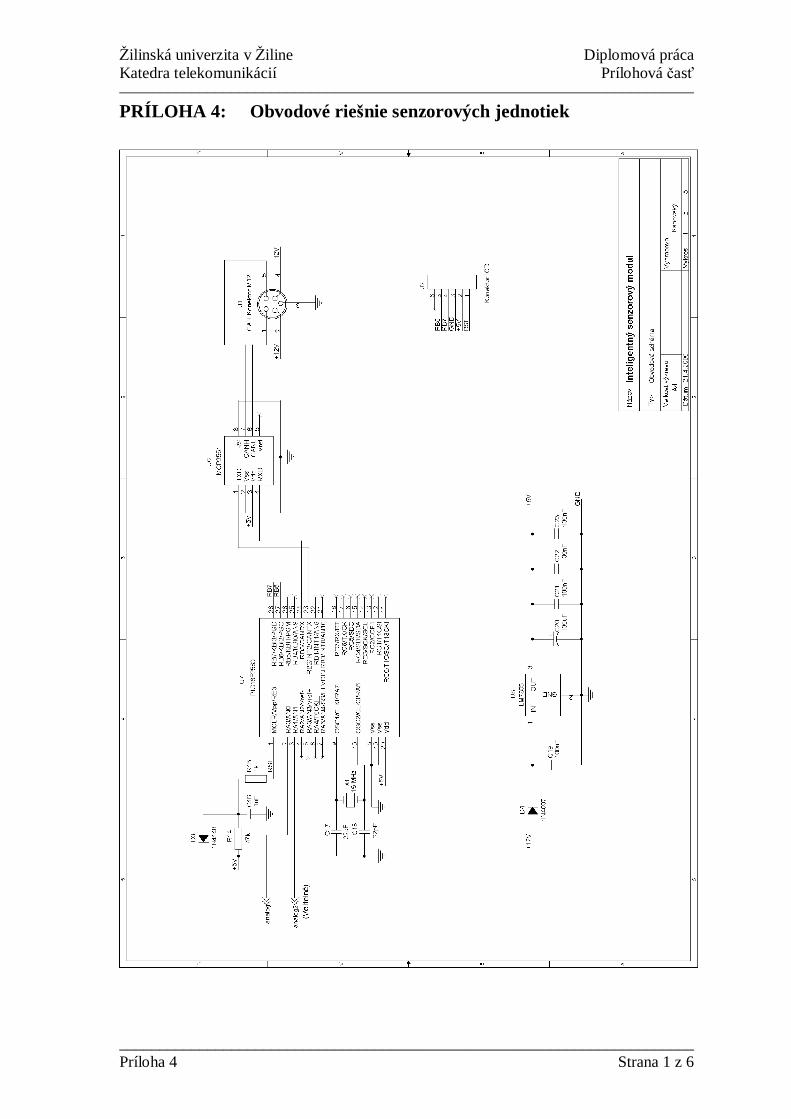
ilinská univerzita v iline Diplomová prácaKatedra telekomunikácií Prílohová as––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––
________________________________________________________________________Príloha 4 Strana 1 z 6
PRÍLOHA 4: Obvodové rie nie senzorových jednotiek
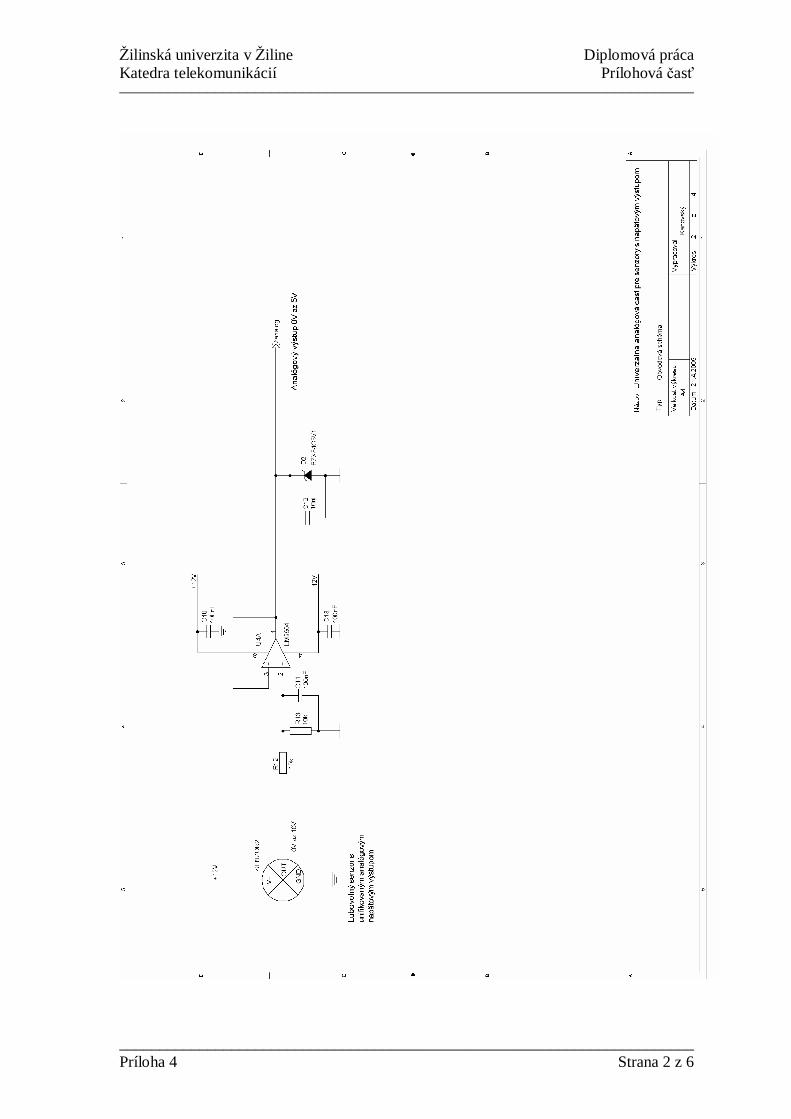
ilinská univerzita v iline Diplomová prácaKatedra telekomunikácií Prílohová as––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––
________________________________________________________________________Príloha 4 Strana 2 z 6
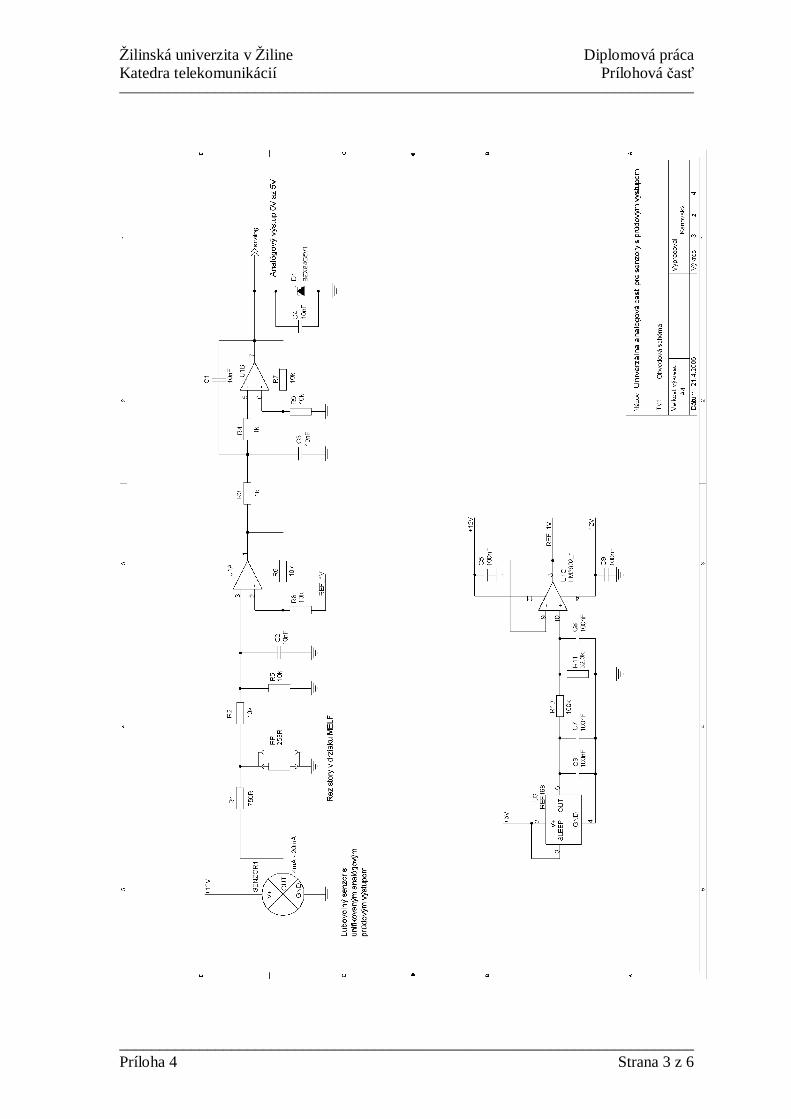
ilinská univerzita v iline Diplomová prácaKatedra telekomunikácií Prílohová as––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––
________________________________________________________________________Príloha 4 Strana 3 z 6

ilinská univerzita v iline Diplomová prácaKatedra telekomunikácií Prílohová as––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––
________________________________________________________________________Príloha 4 Strana 4 z 6

ilinská univerzita v iline Diplomová prácaKatedra telekomunikácií Prílohová as––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––
________________________________________________________________________Príloha 4 Strana 5 z 6
Zoznam sú iastok
Zoznam sú iastok pre inteligentný senzorový modul
Po et Referencia Popis Výrobca
1 C16 Keramický kondenzátor 1nF/50V ROHM
2 C17, C18 Keramický kondenzátor 22pF/50V ROHM
4 C19, C21, C22, C23 Keramický kondenzátor 100nF/50V ROHM
1 C20 Elektrolytický kondenzátor 100µF/16V PANASONIC
1 D3 Kremíková dióda 1N4148 GI
1 D4 Kremíková usmer ovacia dióda 1N4007 GI
1 J1 Konektor M12-male TURCK
1 J2 Konektor Canon, 9 pin, male SAMTEC
1 R14 Rezistor 0,125W, 47k, 1% ROHM
1 R15 Rezistor 0,125W, 1k, 1% ROHM
1 U6 CAN transceiver, MCP2551 Microchip
1 U7 Mikroprocesor PIC18F2580 Microchip
1 U8 Monolitický stabilizátor napätia LM7805 Philips
1 X1 Rezonan ný kry tál 16.00 MHz ECS
Zoznam sú iastok pre analógovú as senzorov s napä ovým výstupom
Po et Referencia Popis Výrobca
5C10, C11, C13,
C14, C15Keramický kondenzátor 100nF/50V ROHM
1 C12 Keramický kondenzátor 10nF/50V ROHM
1 D2 Zenerova dióda BZX84C5V1 GI
2 R12, R13 Rezistor 0,125W, 10k, 1% ROHM
1 U4 Opera ný zosil ova LM2904 ST
1 U5 Zdroj referen ného napätia REF198 Motorola
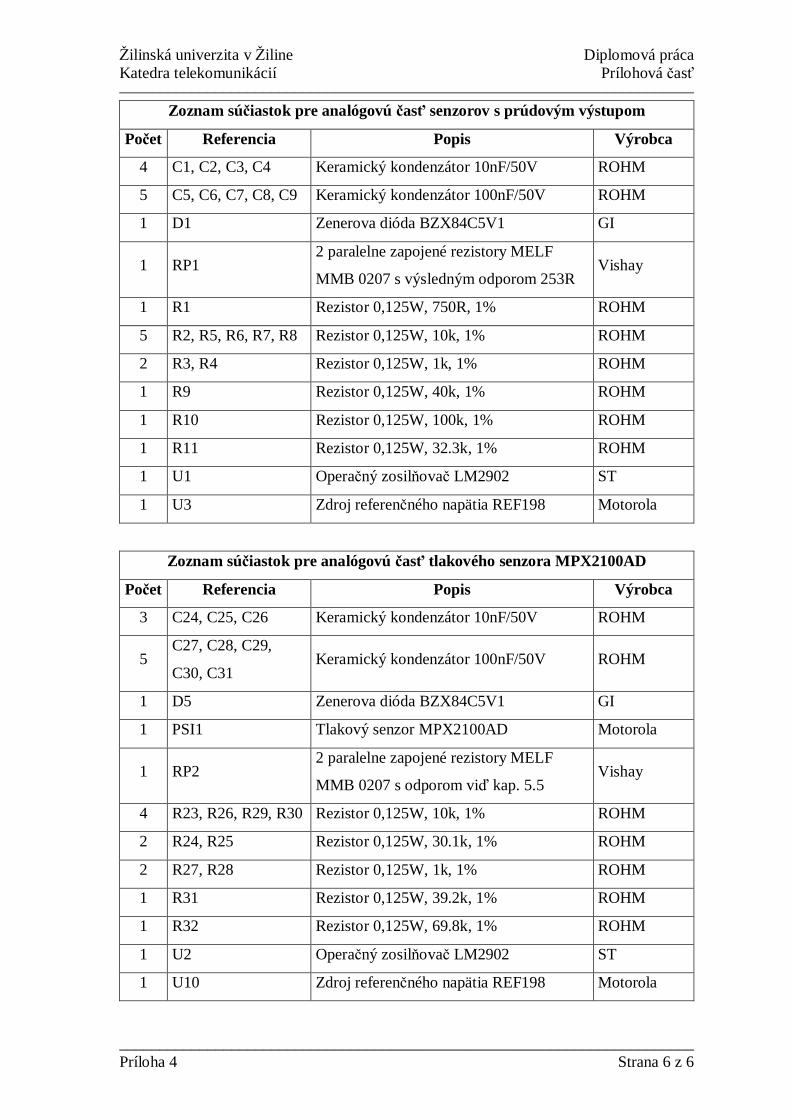
ilinská univerzita v iline Diplomová prácaKatedra telekomunikácií Prílohová as––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––
________________________________________________________________________Príloha 4 Strana 6 z 6
Zoznam sú iastok pre analógovú as senzorov s prúdovým výstupom
Po et Referencia Popis Výrobca
4 C1, C2, C3, C4 Keramický kondenzátor 10nF/50V ROHM
5 C5, C6, C7, C8, C9 Keramický kondenzátor 100nF/50V ROHM
1 D1 Zenerova dióda BZX84C5V1 GI
1 RP12 paralelne zapojené rezistory MELF
MMB 0207 s výsledným odporom 253RVishay
1 R1 Rezistor 0,125W, 750R, 1% ROHM
5 R2, R5, R6, R7, R8 Rezistor 0,125W, 10k, 1% ROHM
2 R3, R4 Rezistor 0,125W, 1k, 1% ROHM
1 R9 Rezistor 0,125W, 40k, 1% ROHM
1 R10 Rezistor 0,125W, 100k, 1% ROHM
1 R11 Rezistor 0,125W, 32.3k, 1% ROHM
1 U1 Opera ný zosil ova LM2902 ST
1 U3 Zdroj referen ného napätia REF198 Motorola
Zoznam sú iastok pre analógovú as tlakového senzora MPX2100AD
Po et Referencia Popis Výrobca
3 C24, C25, C26 Keramický kondenzátor 10nF/50V ROHM
5C27, C28, C29,
C30, C31Keramický kondenzátor 100nF/50V ROHM
1 D5 Zenerova dióda BZX84C5V1 GI
1 PSI1 Tlakový senzor MPX2100AD Motorola
1 RP22 paralelne zapojené rezistory MELF
MMB 0207 s odporom vi kap. 5.5Vishay
4 R23, R26, R29, R30 Rezistor 0,125W, 10k, 1% ROHM
2 R24, R25 Rezistor 0,125W, 30.1k, 1% ROHM
2 R27, R28 Rezistor 0,125W, 1k, 1% ROHM
1 R31 Rezistor 0,125W, 39.2k, 1% ROHM
1 R32 Rezistor 0,125W, 69.8k, 1% ROHM
1 U2 Opera ný zosil ova LM2902 ST
1 U10 Zdroj referen ného napätia REF198 Motorola
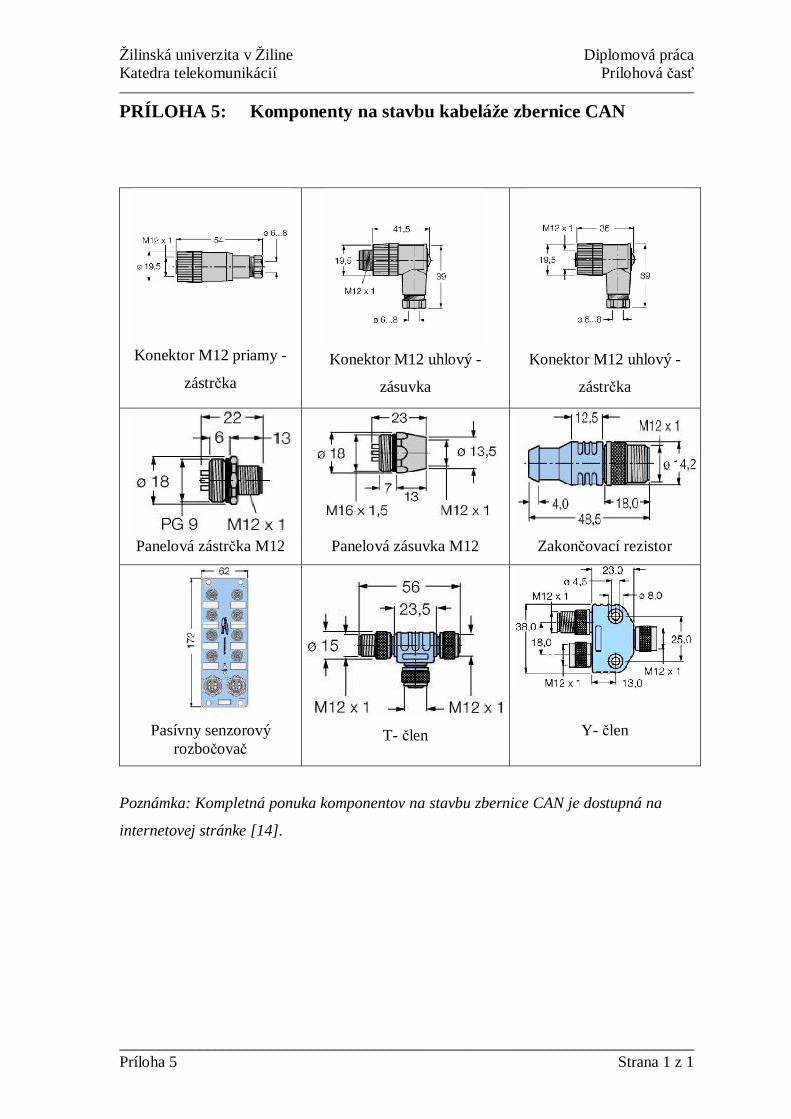
ilinská univerzita v iline Diplomová prácaKatedra telekomunikácií Prílohová as––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––
________________________________________________________________________Príloha 5 Strana 1 z 1
PRÍLOHA 5: Komponenty na stavbu kabelá e zbernice CAN
Konektor M12 priamy -
zástr kaKonektor M12 uhlový -
zásuvka
Konektor M12 uhlový -
zástr ka
Panelová zástr ka M12 Panelová zásuvka M12 Zakon ovací rezistor
Pasívny senzorovýrozbo ova
T- len Y- len
Poznámka: Kompletná ponuka komponentov na stavbu zbernice CAN je dostupná na
internetovej stránke [14].
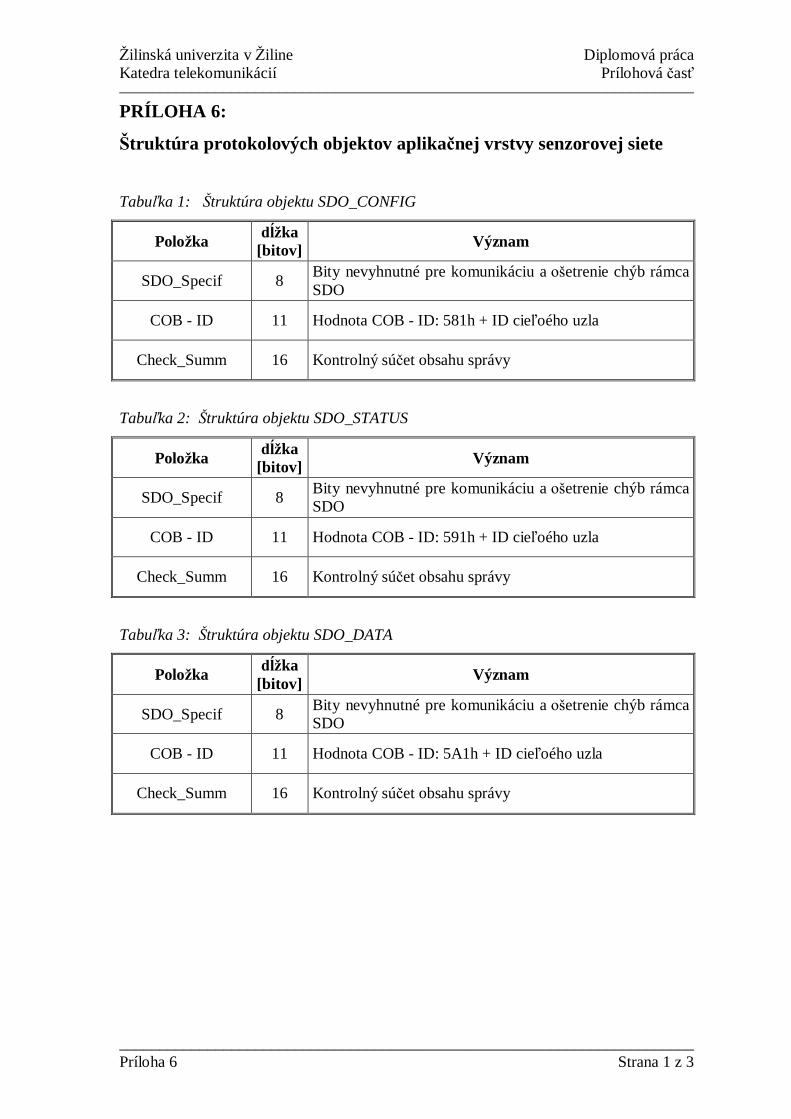
ilinská univerzita v iline Diplomová prácaKatedra telekomunikácií Prílohová as––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––
________________________________________________________________________Príloha 6 Strana 1 z 3
PRÍLOHA 6:
truktúra protokolových objektov aplika nej vrstvy senzorovej siete
Tabu ka 1: truktúra objektu SDO_CONFIG
Polo ka ka[bitov] Význam
SDO_Specif 8 Bity nevyhnutné pre komunikáciu a etrenie chýb rámcaSDO
COB - ID 11 Hodnota COB - ID: 581h + ID cie oého uzla
Check_Summ 16 Kontrolný sú et obsahu správy
Tabu ka 2: truktúra objektu SDO_STATUS
Polo ka ka[bitov] Význam
SDO_Specif 8 Bity nevyhnutné pre komunikáciu a etrenie chýb rámcaSDO
COB - ID 11 Hodnota COB - ID: 591h + ID cie oého uzla
Check_Summ 16 Kontrolný sú et obsahu správy
Tabu ka 3: truktúra objektu SDO_DATA
Polo ka ka[bitov] Význam
SDO_Specif 8 Bity nevyhnutné pre komunikáciu a etrenie chýb rámcaSDO
COB - ID 11 Hodnota COB - ID: 5A1h + ID cie oého uzla
Check_Summ 16 Kontrolný sú et obsahu správy

ilinská univerzita v iline Diplomová prácaKatedra telekomunikácií Prílohová as––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––
________________________________________________________________________Príloha 6 Strana 2 z 3
Tabu ka 4: truktúra objektu PDO_CONFIG
Polo ka ka[bitov] Význam
COB - ID 11 Hodnota COB - ID: 181h + ID uzla
Timer 16 Interval automatického odosielania nameranej hodnoty
Low_Limit 8 Spodná bezpe ná hranica hodnoty meranej veli iny
High_Limit 8 Horná bezpe ná hranica hodnoty meranej veli iny
Check_Summ 16 Kontrolný sú et obsahu správy
Tabu ka 5: truktúra objektu PDO_STATUS
Polo ka ka[bitov] Význam
COB - ID 11 Hodnota COB - ID: 191h + ID uzla
Status_Info 8 Informácia o stave senzora
Check_Summ 16 Kontrolný sú et obsahu správy
Tabu ka 6: truktúra objektu PDO_DATA
Polo ka ka[bitov] Význam
COB - ID 11 Hodnota COB - ID: 1A1h + ID uzla
Status_Info 8 Informácia o stave senzora
Data_Length 8 D ka po a Value
Value 16 Hodnoty meraných veli ín
Check_Summ 16 Kontrolný sú et obsahu správy
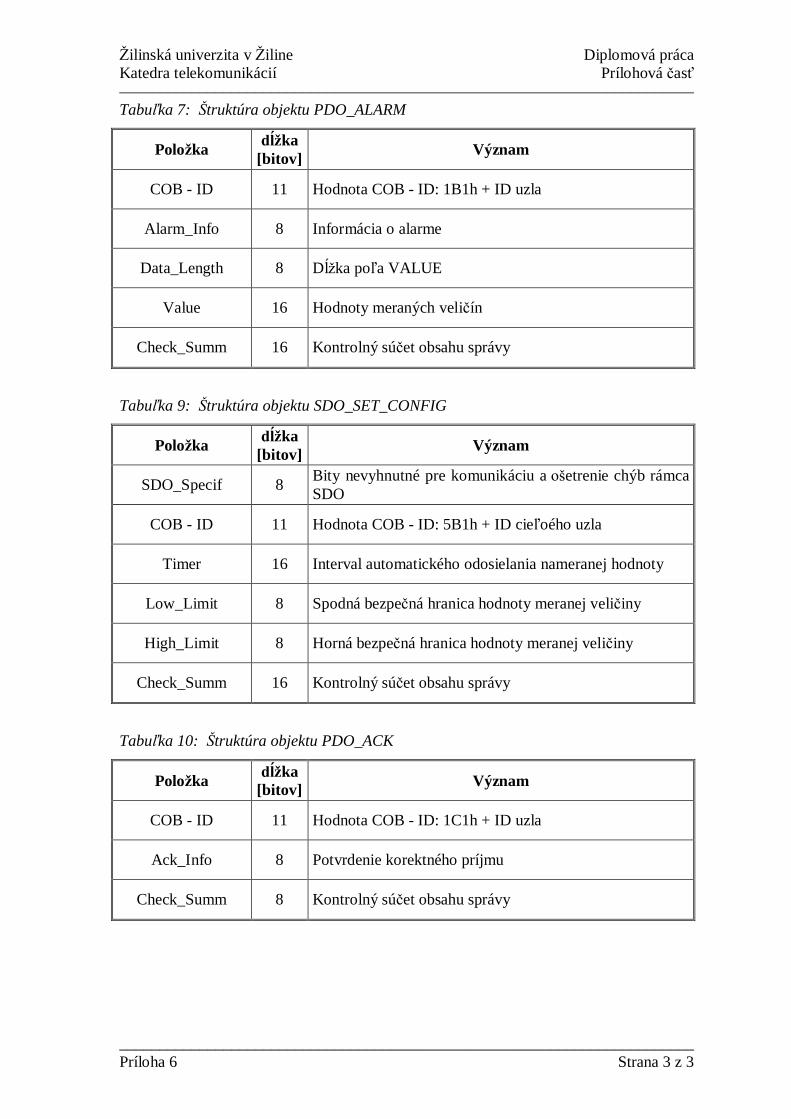
ilinská univerzita v iline Diplomová prácaKatedra telekomunikácií Prílohová as––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––
________________________________________________________________________Príloha 6 Strana 3 z 3
Tabu ka 7: truktúra objektu PDO_ALARM
Polo ka ka[bitov] Význam
COB - ID 11 Hodnota COB - ID: 1B1h + ID uzla
Alarm_Info 8 Informácia o alarme
Data_Length 8 D ka po a VALUE
Value 16 Hodnoty meraných veli ín
Check_Summ 16 Kontrolný sú et obsahu správy
Tabu ka 9: truktúra objektu SDO_SET_CONFIG
Polo ka ka[bitov] Význam
SDO_Specif 8 Bity nevyhnutné pre komunikáciu a etrenie chýb rámcaSDO
COB - ID 11 Hodnota COB - ID: 5B1h + ID cie oého uzla
Timer 16 Interval automatického odosielania nameranej hodnoty
Low_Limit 8 Spodná bezpe ná hranica hodnoty meranej veli iny
High_Limit 8 Horná bezpe ná hranica hodnoty meranej veli iny
Check_Summ 16 Kontrolný sú et obsahu správy
Tabu ka 10: truktúra objektu PDO_ACK
Polo ka ka[bitov] Význam
COB - ID 11 Hodnota COB - ID: 1C1h + ID uzla
Ack_Info 8 Potvrdenie korektného príjmu
Check_Summ 8 Kontrolný sú et obsahu správy
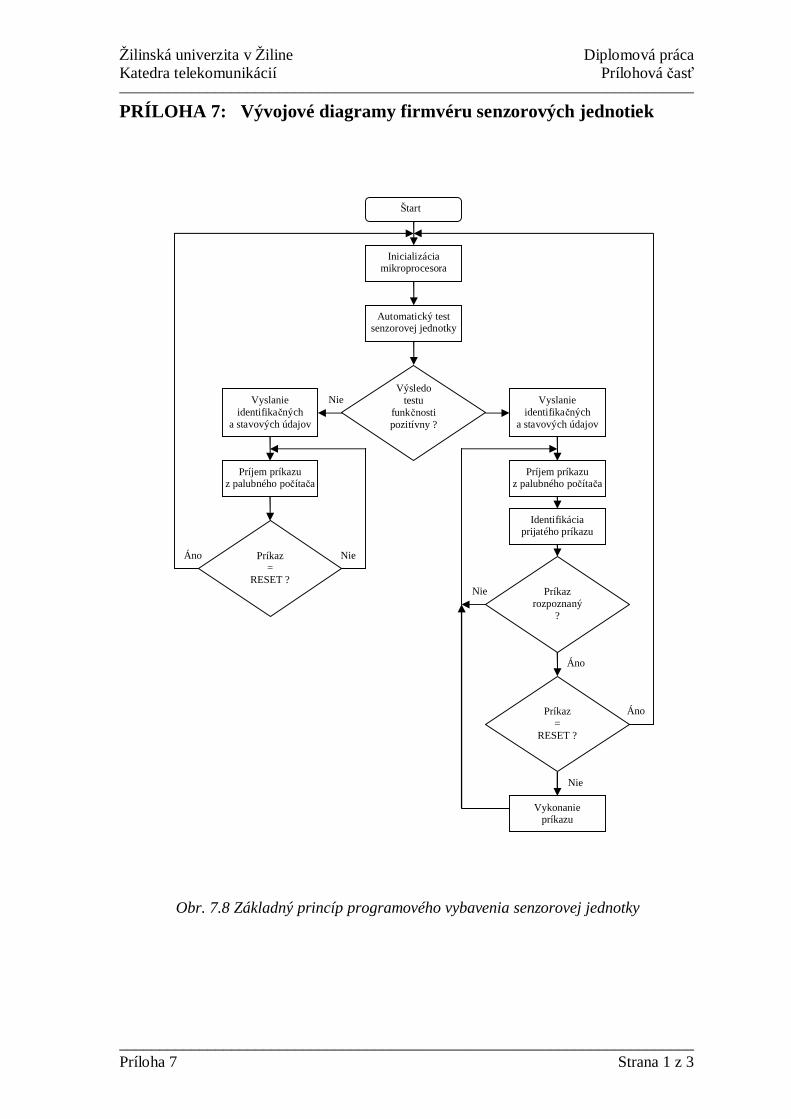
ilinská univerzita v iline Diplomová prácaKatedra telekomunikácií Prílohová as––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––
________________________________________________________________________Príloha 7 Strana 1 z 3
PRÍLOHA 7: Vývojové diagramy firmvéru senzorových jednotiek
Obr. 7.8 Základný princíp programového vybavenia senzorovej jednotky
tart
Inicializáciamikroprocesora
Automatický testsenzorovej jednotky
Výsledotestu
funk nostipozitívny ?
Vyslanieidentifika ných
a stavových údajov
Príjem príkazuz palubného po íta a
Príkaz=
RESET ?
Príkaz=
RESET ?
Vyslanieidentifika ných
a stavových údajov
Príjem príkazuz palubného po íta a
Nie
NieÁno
Identifikáciaprijatého príkazu
Vykonaniepríkazu
Príkazrozpoznaný
?
Áno
Áno
Nie
Nie

ilinská univerzita v iline Diplomová prácaKatedra telekomunikácií Prílohová as––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––
________________________________________________________________________Príloha 7 Strana 2 z 3
Obr. 7.9 Inicializácia mikroprocesora
Definovanievstupných pinovmikroprocesora
Definovanieanalógových
vstupovmikroprocesora
Definovaniestavu výstupných
pinovmikroprocesora
Definovanievýstupných
pinovmikroprocesora
InicializáciaRAM pamäte
mikroprocesora
Inicializácia A/Dprevodníka
Inicializáciapreru ovacieho
subsystému
InicializáciaCAN radi a
Na ítaniekonfiguráciez EEPROM
pamäte
Koniecinicializácie
Inicializáciamikroprocesora
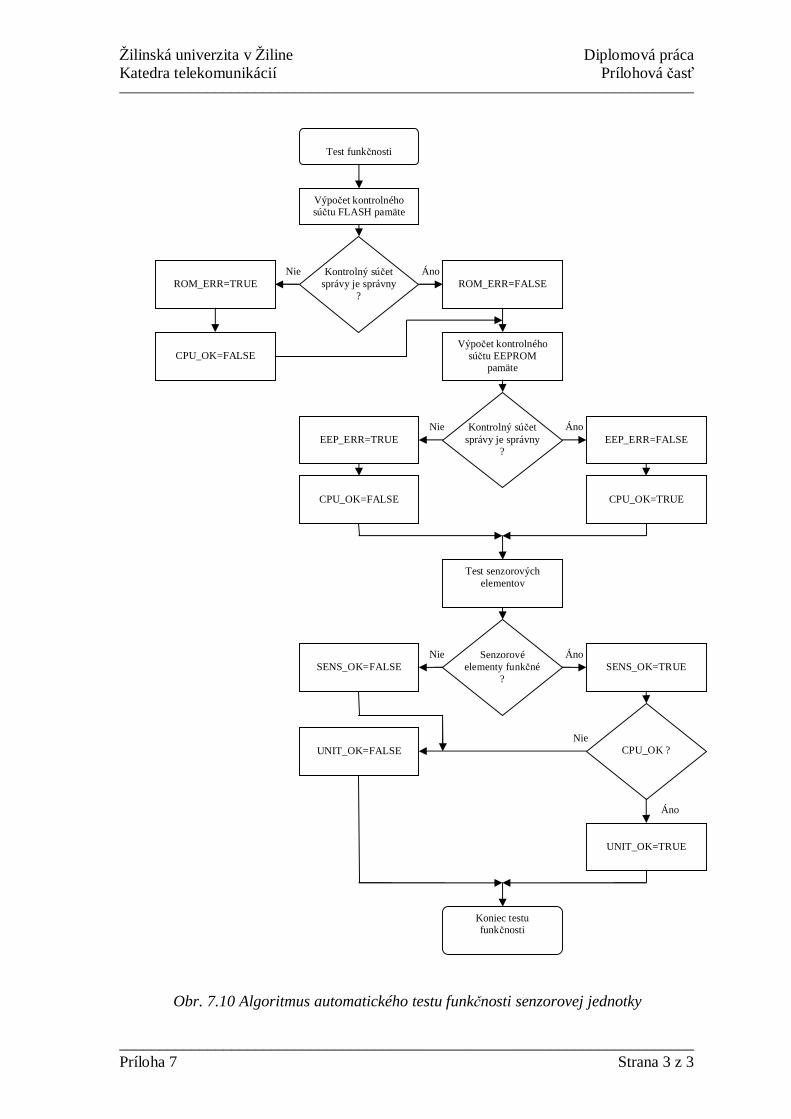
ilinská univerzita v iline Diplomová prácaKatedra telekomunikácií Prílohová as––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––
________________________________________________________________________Príloha 7 Strana 3 z 3
Obr. 7.10 Algoritmus automatického testu funk nosti senzorovej jednotky
Výpo et kontrolnéhosú tu FLASH pamäte
ROM_ERR=TRUE
CPU_OK=FALSE
ROM_ERR=FALSE
Výpo et kontrolnéhosú tu EEPROM
pamäte
EEP_ERR=TRUE
CPU_OK=FALSE
SENS_OK=FALSE
UNIT_OK=FALSE
EEP_ERR=FALSE
CPU_OK=TRUE
Test senzorovýchelementov
SENS_OK=TRUE
UNIT_OK=TRUE
Test funk nosti
Kontrolný sú etsprávy je správny
?
Kontrolný sú etsprávy je správny
?
Senzorovéelementy funk né
?
CPU_OK ?
Koniec testufunk nosti
Nie
Nie
Nie
Nie
Áno
Áno
Áno
Áno
![Diplomová práca - iam.fmph.uniba.sk€¦ · BRESTENSKÝ, Róbert: Matematické modelovanie popálenín kože [Diplomová práca]. Univerzita Komenského v Bratislave, Mlynská dolina,](https://img.pdfslide.tips/doc/110x75/5f096e827e708231d426ced1/diplomov-prca-iamfmphunibask-brestensk-rbert-matematick-modelovanie.jpg)




























