Embed Size (px)
Citation preview

Papp Ferenc
Ph.D., Dr.habil
Elmozdulás-módszer a mérnöki gyakorlatban
Tartószerkezetek statikája I.
tantárgy előadásait kiegészítő anyag különleges érdeklődésű hallgatók
számára
Győr 2014

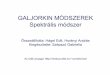
1. A nyomott rúdelem merevsége 1.1 A mereven befogott rúdelem 1.1.1 Az elfordítási merevség Határozzuk meg a 1a ábrán látható mereven befogott nyomott-hajlított rugalmas rúdelem elfordítási merevségét, ha a rúdelem keresztmetszete (A, EI) és a rúdelemre ható P nyomóerő állandó. A rúdelem két végét jelöljük j és k betűkkel. Legyen a rúd j végének elfordítása (befogással együtt) θj. Az elfordításhoz az állandó P nyomóerő mellett Mj és Mk rúdvégi nyomaték és V nyíróerő tartozik. Határozzuk meg a θj rúdvégi elfordításhoz tartozó Mj és Mk nyomatékokat és a V nyíróerőt!
1. ábra. A nyomott-hajlított rúdelem elfordítási merevségének meghatározása:
a) modell; b) egyensúlyi feltétel.
A feladat megoldása érdekében helyezzük a rúdelemet az (x;z) koordináta rendszerbe. Legyen w=w(x) a meggörbült rúd z irányú elmozdulását (görbe alakját) leíró függvény. Írjuk fel a rúdelem egyensúlyi egyenletét az x koordináta által meghatározott pontra (1b ábra):
0xVMwP''wEI j =⋅−+⋅+⋅ (1)
A (1) egyenletben EI⋅w” a rúd görbületéből származó belső nyomaték. A V nyíróerő ismert, mert kifejezhető a külső nyomatéki egyensúlyi feltételből:
L
MMV kj +
= (2)
Osszuk el EI-vel a (1) egyenletet, használjuk fel a (2) kifejezést, és vezessük be a EI
P2 =κ
paramétert:
EI
Mx
L
MM
EI
1w''w jkj2 −⋅
+⋅=⋅+κ (3)
A (3) hiányos inhomogén differenciálegyenlet megoldása ismert:
k θj
Mj
Mk
L
EI
P P x
j z
b)
x
z
a)
x
w
Mj EI⋅w”
V V
V

( ) ( )P
Mx
L
MM
P
1xcosBxsinAw ABBAAB −⋅+⋅+⋅⋅+⋅⋅= κκ (4)
A (4) egyenletben az A és B állandók, valamint az Mj és Mk rúdvégi nyomatékok az ismeretlenek. A négy ismeretlen a következő négy független peremfeltételből meghatározható:
a) x=0 → w(0)=0
Behelyettesítés és rendezés után:
P
MB j= (5a)
b) x=L → w(L)=0
Behelyettesítés és rendezés után:
( ) ( )( )( ) ( )Lsin
1
P
M
Lsin
Lcos
P
MA
MP
1Lcos
P
MLsinA0
kk
kj
⋅⋅−
⋅⋅⋅−=
⋅+⋅+⋅⋅=
κκκ
κκ (5b)
c) x=L → w’(L)=0 (zérus rúdvégi lefordulás)
Behelyettesítés és rendezés után:
( ) ( ) 0L
MM
P
1LsinBLcosA)L('w kj =
+⋅+⋅⋅−⋅⋅= κκκκ
Az A és B állandó a (5a) és (5b) alapján ismert. Legyen c a rúdvégi nyomatékok aránya:
( )
( ) ( )ααααα
⋅⋅⋅−⋅⋅−⋅==
2cos22sin
2sin2
M
Mc
j
k (5c)
ahol
2
2
E
E
L
EIP
P
P22
L
⋅=
=
⋅=⋅=
π
ρ
ρπκα
d) x=0 → w’(0)=θj (ismert rúdvégi lefordulás)
Behelyettesítés és rendezés után:
jkj
L
MM
P
1A)0('w θκ =
+⋅+⋅=
Fejezzük ki az Mj rúdvégi nyomatékot a rúdvégi elfordítás függvényében:
jj ksM θ⋅⋅=
ahol ( )( )
ααααα
θ −⋅⋅⋅−⋅=
⋅=
tan
2cot21
k
Ms
j
j (5d)
L
EIk =
A (5a-d) képletek alapján a következő megállapításokat tehetjük:

� A mereven befogott rúdelem j végének θj elfordításához állandó P nyomóerő
mellett az alábbi rúdvégi nyomatékra van szükség (1a ábra):
jj ksM θ⋅⋅=
A kifejezésben s az elfordítási stabilitási függvény:
( )( )
ααααα
−⋅⋅⋅−⋅=
tan
2cot21s
Az α paraméter kifejezhető a ρ fajlagos nyomóerővel:
2
2
E
E
L
EIP
P
P2
⋅=
=
⋅=
π
ρ
ρπα
Továbbá: L
EIk =
� A rúd befogott végén az alábbi rúdvégi nyomaték keletkezik:
jk kcsM θ⋅⋅⋅=
A kifejezésben c a nyomaték átviteli stabilitási függvény:
( )
( ) ( )ααααα
⋅⋅⋅−⋅⋅−⋅=
2cos22sin
2sin2c
A fenti összefüggések megértését az alábbi észrevételek alapos átgondolása nagymértékben megkönnyítheti:
� Ha P=0, akkor s=4 és c=0,5, ami az elemi statika (elsőrendű elmélet) ismert összefüggéseire vezet:
j2
jk
jj
L
EI6V
L
EI2M
L
EI4M
θ
θ
θ
⋅⋅=
⋅⋅=
⋅⋅=
� Ha ρ=2,042, akkor s=0 és c→∞, azaz a rúdelem kritikus állapotban van, ahol a kritikus erő:
2
2
Ecr L
EIPP
⋅⋅=⋅= πρρ
� A ρ fajlagos nyomóerő és a υ kihajlási hossz között az alábbi kapcsolat áll fenn:
ρ
υ 1=
Ha ρ=2,042 (lásd az előző pontot), akkor υ=0,7, ami az egyik végén mereven befogott, a másik végén szabadon elforduló rúdelem ismert kihajlási hossza.

Amennyiben a P erő húzóerő, a fenti gondolatmenethez hasonlóan levezethetjük az s és c stabilitási függvények megfelelő képleteit, amelyekben az α paraméter hiperbolikus függvényei szerepelnek (HORN M.R. - MERCHANT W. 1965). A mérnöki szemlélet oldaláról elemezve az eredményeket kimondhatjuk, hogy a rúdelemre működő nyomóerő csökkenti, a húzóerő pedig növeli a rúdvégi elfordítási merevséget.
1 Példa Határozzuk meg az alábbi ábrán vázolt rúdszerkezet Pcr kritikus terhét! A rúdelemek végei befogottak, a szerkezet sarokpontjában a rúdvégek mereven kapcsolódnak egymáshoz (merev keretsarok).
Használjuk a mereven befogott rúdelem előzőekben meghatározott elfordítási merevségét! Tételezzük fel, hogy a rudak összenyomódása elhanyagolható, és így a keretsarok csak elfordulni tud. A két rúd elfordítási merevsége a keretsarokban összegződik, így a keretsarok elfordításához szükséges Mext külső nyomaték az alábbi formában írható fel: θ⋅⋅+=+= k)ss(MMM 212,j1,jext
Kritikus állapotban a keretsarok elfordításához Mext→ 0 nyomatékra van szükség, ezért
0k)ss( 21 =⋅⋅+ θ
Mivel a modell kihajlott állapotában θ ≠0, ezért
0ss 21 =+
Az 1 jelű rúdban a kihajlás pillanatában nem ébred normálerő, ezért s1=4, és így a kritikus állapot feltétele:
4s2 −=
A 2 jelű rúdban a kihajlás pillanatában a nyomóerő egyenlő a külső P erővel, ezért keressük a P erő azon értékét, amelynél a (2-5d) szerinti s stabilitásfüggvény -4 értéket vesz fel: ρcr=2,877 → s=-4
A 2 jelű rúd Euler-féle kritikus ereje:
kN2135L
IEP
m10708,3I ;m
kN101,2E ; m6L
2
2
E
452
8
=⋅⋅=
⋅=⋅== −
π
A kritikus erő: kN6142PP Ecrcr =⋅= ρ
Az ábra a szerkezet kihajlott alakját mutatja.
L
L
Keresztmetszet: HEA 200 Anyagminősség: S235 Rúdhossz: L=6,0 m
Pcr=?
1
2

1.1.2 Eltolási merevség Határozzuk meg a 2a ábrán látható mereven befogott nyomott-hajlított rugalmas rúdelem eltolási (kilengési) merevégét. Jelölje δ a j rúdvég z irányú elmozdulását, miközben a rúdvég nem fordul el. A feladat megoldásához nem szükséges felírni az egyensúlyi differenciálegyenletet, mert viszonylag kis elmozdulásokat feltételezve (sinα≅α; cosα≅1) a probléma visszavezethető a már ismert elfordulási merevségre (ld. a 1.1.1 szakaszt). A 2b ábra szerint az eltolt végű rúdelem úgy tekinthető, mint a két végén ϕ=δ/L szöggel elfordított rúdelem, ahol a rúdvégi erők megváltozását elhanyagoljuk.
2. ábra. A nyomott-hajlított rúdelem kilengési merevségének meghatározása:
a) modell; b) közelítő feltevés.
A megoldás érdekében írjuk fel a globális nyomatéki egyensúlyi egyenletet a j rúdvégre:
0PLVMM kj =⋅−⋅−+ δ (6)
Írjuk fel a rúdvégi nyomatékokat a 2-2b ábra és a 2.1.1.1 szakasz alapján:
jk
kjj
MM
kcsksM
=
⋅⋅⋅+⋅⋅= θθ (7)
Mivel θj=θk=δ/L, ezért
( ) δ⋅⋅+⋅==L
kc1sMM kj (8)
A V nyíróerőt fejezzük ki a (6) egyensúlyi egyenletből:
LP
L
MMV kj δ−
+= (9)
Használjuk fel, hogy
2
2
E L
EIPP
⋅⋅=⋅= πρρ (10)
és így a (9) az alábbi alakban írható:
( )[ ] δρπ ⋅⋅⋅−+⋅⋅= 22
L
kc1s2V (11)
k ϕ =δ/L
Mj
Mk
L
EI
P
P x
j z
b)
a)
V
V
δ
θj=ϕ
θk=ϕ
P P
Mj Mk V
V

Vezessük be az alábbi stabilitási függvényt: ( )
( ) ρπ ⋅−+⋅⋅+⋅⋅=
2c1s2
c1s2m (12)
Fejezzük ki a V nyíróerőt a (12) függvény segítségével:
( ) δ⋅⋅+⋅⋅= 2L
k
m
c1s2V (13)
A (8) és (13) képletek alapján a következő megállapításokat tehetjük:
� A mereven befogott rúdelem végének δ eltolásához állandó P nyomóerő mellett az alábbi rúdvégi nyomatékok tartoznak (2a ábra):
( ) δ⋅⋅+⋅==L
kc1sMM kj (14)
A kifejezésben s és c függvények megfelelnek a 1a ábra szerinti feladatnak.
� A rúdvég δ eltolásához az alábbi V nyíróerő tarozik:
( ) δ⋅⋅+⋅⋅= 2L
k
m
c1s2V (15)
A kifejezésben m stabilitási függvény az alábbi alakban írható: ( )
( ) ρπ ⋅−+⋅⋅+⋅⋅=
2c1s2
c1s2m (16)
A fenti összefüggések megértését az alábbi észrevételek alapos átgondolása nagymértékben megkönnyítheti: � Ha P=0, akkor s=4, c=0.5 és m=1, ami az elemi statika (elsőrendű elmélet) ismert
összefüggéseire vezet:
δ
δ
⋅⋅=
⋅⋅==
3
2kj
L
EI12V
L
EI6MM
� Ha ρ=1,0, akkor s=2,467, c=1, m→∞ és a fajlagos eltolási merevség zérussá válik, ami a rúdelem kritikus állapotát jelenti. A kritikus nyomóerő:
( )
0m
c1s →+⋅ és 2
2
cr L
EIP
⋅= π
� A ρ fajlagos nyomóerő és a υ kihajlási hossz közötti ismert összefüggés alapján a mereven befogott kilengő rúdelem kihajlási hossza:
0,11 ==ρ
υ

2 Példa Határozzuk meg az alábbi ábrán vázolt rúdszerkezet Pcr kritikus terhét! A függőleges oszlopok alsó végei befogottak, a felső végeket végtelen merev gerenda köti össze. Az oszlopok mereven kötnek be a gerendába.
Mivel a két befogott oszlopot a gerenda mereven köti össze, a két oszlop vízszintes irányban együtt tolódik el. Tételezzük fel, hogy az oszlopok összenyomódása elhanyagolható. Használjuk fel a rúdelem előzőekben meghatározott eltolási merevségét. A gerenda vízszintes δ eltolásához az alábbi Hext külső erőre van szükség:
( ) ( ) δ⋅
⋅+⋅⋅+⋅+⋅⋅=+= 2
3
3
3
3322
2
2
2232ext L
k
m
c1s2
L
k
m
c1s2VVH
Kritikus állapotban az eltoláshoz Hext→ 0 erőre van szükség, így
( ) ( )
⋅+⋅++⋅8
m
c1s
m
c1s
3
33
2
22 =0
A 2 jelű oszlopban a kihajlás pillanatában nem ébred nyomóerő, ezért s2=4, c2=0,5 és m2=1, és így a kritikus állapot feltétele:
( )
75,0m
c1s
3
33 −=+⋅
Mivel a 3 jelű oszlopban a kihajlás pillanatában a nyomóerő egyenlő a külső P erővel, ezért keressük a P erő azon értékét, amelynél teljesül a fenti egyenlet. A megoldás:
ρcr=1,123
A 3 jelű oszlop Euler-féle kritikus ereje:
kN540.8L
IEP
m10708,3I ;m
kN101,2E ; m3L
2
2
E
452
8
=⋅⋅=
⋅=⋅== −
π
A kritikus erő: kN590.9PP Ecrcr =⋅= ρ
Az ábra a szerkezet kihajlott alakját mutatja.
L
L
Keresztmetszet: HEA 200 Anyagminősség: S235 Rúdhossz: L=6,0 m
Pcr=?
1
2
L/2 3

2. Különleges kialakítású rúdelemek merevsége A 1. szakaszban mereven befogott rúdelemek merevségét határoztuk meg másodrendű elmélet alapján. Az irodalomból számos olyan eredmény ismert, amely a stabilitásfüggvényeket különleges peremfeltételekre, terhekre és rúdmentén változó keresztmetszetre terjeszti ki. Ebben a szakaszban ezekből a különleges esetekből mutatunk be néhányat. Hangsúlyozzuk, hogy a modern számítógépek és végeselemes analízis programok elterjedésével ezen ismeretek gyakorlati jelentősége nagyban csökkent, de didaktikai szempontból fontosnak tartjuk a rövid ismertetésüket. Az itt megismert gondolatok, módszertani meggondolások jelentősen segíthetik a mérnöki gondolkodás és a statikusi készség fejlődését. 2.1 A csuklós végű rúdelem merevsége Először határozzuk meg a 3 ábrán látható csuklós végű nyomott-hajlított rugalmas rúdelem elfordítási merevségét, ha a rúdelem keresztmetszete (A, EI) és a rúdelemre ható P nyomóerő állandó. Fordítsuk el a rúd j végét (befogással együtt) θj -vel. Az elfordításhoz állandó P nyomóerő mellett Mj rúdvégi nyomaték és V nyíróerő tartozik. Határozzuk meg a θj
rúdvégi elfordításhoz tatozó Mj nyomatékot és V nyíróerőt!
3. ábra. A csuklós végű nyomott-hajlított rúdelem elfordítási merevségének meghatározása.
A feladat megoldásához nem szükséges a 3 ábrán vázolt modellre felírni az egyensúlyi differenciálegyenletet, ahogy azt a 1a ábrán vázolt esetben tettük. Elegendő felhasználni az eddig levezetett stabilitási függvényeket. Írjuk fel a rúdvégi nyomatékokat az eddigi ismereteink alapján:
kjj kcsksM θθ ⋅⋅⋅+⋅⋅= (17)
0kskcsM kjk =⋅⋅+⋅⋅⋅= θθ (18)
A (18) egyenletből az alábbi összefüggést kapjuk:
jk c θθ ⋅−= (19)
A (19) kifejezést használjuk fel a (17) egyenletben:
( ) jj2
j2
jj k"skc1skcsksM θθθθ ⋅⋅=⋅⋅−⋅=⋅⋅⋅−⋅⋅= (20)
A (20) alapján a csuklós végű rúdelem elfordítási merevségének fajlagos értékét megadó stabilitásfüggvényhez jutunk:
( )2c1s"s −⋅= (21) A V nyíróerő a globális egyensúlyi feltételből adódik:
k
θj Mj
L
EI P P x
j z
V V
θk

jj
L
k"s
L
MV θ⋅⋅== (22)
Most határozzuk meg a csuklós végű rúdelem eltolási merevségét (4 ábra).
4. ábra. A csuklós végű nyomott-hajlított rúdelem eltolási merevségének meghatározása.
Írjuk fel a rúdvégi nyomatékokat az eddigi ismereteink alapján:
δϕ ⋅⋅=⋅⋅=
=
2j
k
L
EI''sk''sM
0M (23)
A V nyíróerő a rúdelem globális nyomatéki egyensúlyából kifejezhető:
0PLVM j =⋅−⋅− δ
L
1)PM(V j ⋅⋅−= δ (24)
Mivel 2
2
E L
EIPP
⋅⋅=⋅= πρρ , ezért
( ) δρπδπρδ ⋅⋅⋅−=⋅⋅⋅−⋅⋅= 22
3
2
3 L
k''s
L
EI
L
EI"sV (25)
2.2 Egyéb különleges esetek Vizsgáljuk az 5 ábrán látható rugalmasan befogott nyomott-hajlított rugalmas rúdelem merevségét. A rúdelem végein képzeljünk el egy-egy lineárisan rugalmas nyomatéki csuklót. A csuklók a rúdelem részei, a rúdelem csomópontjai a „csuklókon túl” helyezkednek el.
5. ábra. A rugalmasan befogott nyomott-hajlított rúdelem merevségének meghatározása.
θj’
θk’ P P
Mj Mk V
V
θj
θk
j k
Cj
Ck
k Mj
L
EI
P
P x
j z
V
V δ
ϕ=δ/L

Legyen θj és θk a j és a k rúdvégek elfordítása. A rugalmas csuklókban létrejövő relatív elfordulás miatt a csuklók mögötti rúdvégek elfordulása θj’ és θk’. A csuklók mögötti rúdvégek nyomatékai felírhatóak az eddig megismert stabilitási függvényekkel és merevségi kifejezésekkel:
'k
'jj kcsksM θθ ⋅⋅⋅+⋅⋅= (26)
'k
'jk kskcsM θθ ⋅⋅+⋅⋅⋅= (27)
A (26) és (27) rúdvégi nyomatékok felírhatóak a csuklók rugalmas karakterisztikájával is:
( )'jjjj kcM θθ −⋅⋅= (28)
( )'kkkk kcM θθ −⋅⋅= (29)
A (28) és (29) kifejezésekben cj=Cj/k és ck=Ck/k, ahol Cj és Ck a [kNm/rad] dimenziójú rugóállandók. Az (26)-(29) egyenletrendszerből a rúdvégi nyomatékok kifejezhetőek:
k'
j'jj k)cs(ksM θθ ⋅⋅⋅+⋅⋅= (30)
k'kj
'k ksk)cs(M θθ ⋅⋅+⋅⋅⋅= (31)
A (30) és (31) kifejezésekben a vesszővel jelzett módosított stabilitásfüggvények a levezetés mellőzésével a következők:
( )
−⋅+⋅=k
22'j c
c1sss β (32)
( )
−⋅+⋅=j
22'k c
c1sss β (33)
( ) ( )cscs ' ⋅⋅=⋅ β (34)
A fenti kifejezésekben a β paraméter a következő:
( )kj
22
kj cc
c1s
c
1
c
1s1
1
⋅−⋅+
+⋅+
=β (35)
A szakirodalomból további különleges esetekre vonatkozó megoldások is ismertek. Eredeti angol nyelvű szakirodalomnak tekinthető Horn és Merchant szerzőpáros híres könyve (HORN M.R. – MERCHANT W. 1965). Több magyar nyelvű szakirodalom is összefoglalja az ismert eseteket (pl. IVÁNYI M. 1995; HALÁSZ O. - IVÁNYI M. 2001). A legfontosabb különleges esetek a következők:
� Merev végű rúdelem: a modell figyelembe veszi a rúdelem gj és gk hosszú végeinek
tökéletes merevségét, ami például csomólemez vagy kiékelés modellezését teszi lehetővé.
� Képlékeny csomópontú rúdelem: a modell figyelembe veszi a rúdelem végein
esetlegesen kialakuló merev-képlékeny csuklót; a modellnek a képlékeny alapú tervezésnél alkalmazott eljárásoknál lehet jelentősége (például ilyen a földrengésvizsgálatnál alkalmazott „push-over” eljárás).
gj gk L

� Keresztirányú megoszló teherrel terhelt rúdelem: a modellre levezetett
stabilitásfüggvények alkalmazása esetén nem kell a rúdelemet részekre bontani, és így nem növekszik az ismeretlenek (szabadságfokok) száma.
� Változó keresztmetszetű rúdelem: a hajlító nyomaték változását követő változó
gerincmagasságú rúdelem alkalmazásával elkerülhető a részekre (pl. állandó magasságú szegmensekre) bontás, ami jelentősen csökkenti a modell szabadságfokát.
A különleges esetekre levezetett megoldások elsősorban a kézi számítás pontosságának növelését, illetve a kézi és gépi számítás kapacitás igényének minimalizálását szolgálták. A különleges esetek alkalmazásával a szerkezeti modellek szabadságfoka (ismeretlen elmozdulások száma) jelentősen csökkenthető volt. A mai korszerű számítógépek és programok alkalmazásával a szabadságfokok számának kényszerű csökkentése már nem mérvadó. Ugyanakkor, a fenti modelleknek a kézi ellenőrző számításokban továbbra is jelentős szerepe lehet.
3 Példa Határozzuk meg a 1 példában látható modell Pcr kritikus terhét, ha a rúdelemek végei rugalmasan befogottak!
A két rúd elfordítási merevsége a keretsarokban összegződik, így a keretsarok elfordításához szükséges Mext külső nyomaték az alábbi formában írható fel:
θ⋅⋅+=+= k)ss(MMM '2
'12,j1,jext
Kritikus állapotban a keretsarok elfordításához Mext→ 0 nyomatékra van szükség, ezért
0k)ss( '2
'1 =⋅⋅+ θ
L
L
Pcr=?
1
2
C
C
gj gk L
Keresztmetszet: HEA 200 Anyagminősség: S235 Rúdhossz: L=6,0 m Rugalmas befogás: C=5000 kN⋅m/rad

A modell kihajlott állapotában θ ≠0, ezért
0ss '2
'1 =+
Az 1 jelű rúdban a kihajlás pillanatában nem ébred normálerő, ezért s=4 és c=0,5. A keretsarokba a rúdvég mereven köt be, ezért C=∞ . A (2-29) szerint s’1=3,491, így a kritikus állapot feltétele:
491,3s'2 −=
A 2 jelű rúdban a kihajlás pillanatában a nyomóerő egyenlő a külső P erővel, ezért keressük a P erő azon értékét, amelynél a (29) szerinti s’ stabilitásfüggvény -3,491 értéket vesz fel:
ρcr=2,059 → s’=-3,491
A 2 jelű rúd Euler-féle kritikus ereje:
kN2135L
IEP
m10708,3I ;m
kN101,2E ; m6L
2
2
E
452
8
=⋅⋅=
⋅=⋅== −
π
A kritikus erő: kN4396PP Ecrcr =⋅= ρ
Az ábra a szerkezet kihajlott alakját mutatja.
A kihajlási alakot érdemes összevetni a 1 Példa esetén kapott alakkal, ahol a rudak mereven befogottak voltak. 3. Az összetett szerkezetek stabilitásvizsgálata A stabilitásfüggvényekkel összetett szerkezetek is vizsgálhatóak. Ehhez célszerű az elmozdulás-módszernek nevezett mechanikai módszer és a mátrix-módszernek nevezett matematikai módszer kombinációjából álló eljárás alkalmazása. Az eljárásra a továbbiakban az elmozdulás-módszer megnevezést alkalmazzuk. Az elmozdulás-módszer alkalmazásának lényege, hogy a szerkezetet rúdelemekre bontjuk, ahol az egyes rúdelemek merevsége ismert. Például síkbeli szerkezeti modellek esetében alkalmazhatjuk a 1. és 2. szakaszokban meghatározott stabilitásfüggvényeket, de alkalmazhatunk más elven alapuló síkbeli vagy térbeli rúd végeselemeket is. A továbbiakban a stabilitásfüggvényekkel leírt rúdelemek alkalmazására szorítkozunk. 2.3.1 A szabadságfokok meghatározása Amennyiben a rúdelemekre osztott szerkezet minden egyes rúdelme megfelel egy olyan rúdelemnek, amelynek merevsége ismert, akkor meghatározhatjuk a modell szabadságfokát (azaz az ismeretlen elmozdulásokat). Az elmozdulások meghatározásánál alapvetően két módszert követhetünk:
� „gépi” módszer; � „kézi” módszer.
A továbbiakban csak a „kézi” módszerrel foglalkozunk, mert vizsgálatainkat csak egyszerű, kézzel is végrehajtható számításokra kívánjuk korlátozni. Induljunk ki abból, hogy a szerkezeti modell i jelű pontjának a globális (X;Z) síkban bekövetkező elmozdulását a 6 ábra szerint három független elmozdulás komponens (szabadságfok; angolul: „degrees of freedom”, a továbbiakban DOF) írja le. Ezek rendre az ui és wi globális irányú elmozdulások, és a θi elfordulás (DOF=3). Amennyiben a modell csomópontjainak száma n, akkor a modell

szabadságfokainak száma ∑DOF=3⋅n. Ez azt jelenti, hogy még a legegyszerűbb modellek esetén is jelentős számú szabadságfokkal kellene dolgoznunk. A szabadságfokok száma általában jelentősen csökkenthető, ha élünk az alábbi lehetőségekkel:
� a rúdelemek összenyomódásának elhanyagolásából következően a megfelelő szabadságfokok összevonása;
� zérus elmozdulású szabadságfokok kizárása; � szimmetriából következően a megfelelő szabadságfokok összevonása.
6. ábra. Csomópont szabadságfokai (DOF=3).
A 2-7 ábra néhány szerkezeti modell „kézi” számításhoz felvehető szabadságfokait mutatja. A szabadságfokok meghatározásánál éltünk a fent felsorolt egyszerűsítési lehetőségekkel.
6. ábra. Példák a „kézi” számításhoz felvehető szabadságfokok meghatározására.
X
Z
ui
i
wi
θi
θ
DOF=1 DOF=1 DOF=2 DOF=3
θ θ u 1 2
θ1 θ2 u
1 2 θ1 θ2 u
DOF=3 DOF=6 DOF=4
1 2 θ1 θ2 u12
3 4 θ1 θ2 u34
1 2 3 θ1 θ2 u12 θ3

3.2 A globális egyensúlyi egyenletrendszer összeállítása Az elmozdulás-módszer alkalmazása általánosságban az alábbi alakú globális egyensúlyi mátrixegyenletre vezet:
FUK =× (36)
A (36) egyenletben U az ismeretlen elmozdulások vektora, amelynek mérete megegyezik a modell szabadságfokainak számával (∑DOF), F a tehervektor, amelynek mérete azonos az U vektor méretével, továbbá K a merevségi mátrix. A merevségi mátrix négyzetes, és mérete szintén megegyezik a szabadságfokok számával. A merevségi mátrix elemeit a megfelelő rúdelemek merevségeiből állítjuk össze. A (33) mátrixegyenlet minden sora egy egyensúlyi egyenletet jelent, ahol az adott egyenlet mechanikai tartalmát az U elmozdulás vektor megfelelő elemének mechanikai tartalma határozza meg. Amennyiben az elmozdulás eltolódás (u), akkor az egyenlet erőegyensúlyi egyenlet, amennyiben az elmozdulás elfordulás, akkor az egyenlet nyomatéki egyensúlyi egyenlet. A (36) egyensúlyi mátrixegyenlet felírását egy konkrét példán keresztül mutatjuk be. Tekintsük a 7 ábrán látható szerkezeti modellt, ahol feltüntettük a 3.1 szakasz alapján felvett szabadságfokokat.
7. ábra. A három szabadságfokú rúdszerkezeti modell.
Először állítsuk össze az U elmozdulás vektort. Ehhez rendezzük sorba a három szabadságfokoknak megfelelő ismeretlen elmozdulás komponenst (a sorrend tetszőleges):
U=
u2
1
θθ
(37)
A (37) elmozdulás vektornak megfelelő tehervektor:
F=
===
HF
0M
0M
u
2
1
(38)
A (38) tehervektorban M1 és M2 az 1 és a 2 jelű csomópontokban ható (jelen esetben zérus értékű) külső nyomatékok, Fu az u elmozdulás komponens irányában ható külső erő, jelen esetben H. Mivel a modell szabadságfokai között nem szerepelnek a csomópontok függőleges elmozdulásai (az oszlopok összenyomódás elhanyagolható), a P1 és P2 erők nem szerepelnek a tehervektorban.
θ1 θ2 u
1
2 3
DOF=3
1 2
P1 P2=α⋅P1
H

A K merevségi mátrix felírása már nagyobb rutint igényel. Az eljárás megértése érdekében, első lépésben, írjuk fel a három egyensúlyi egyenletet:
1. egyenlet: nyomatéki egyensúlyi egyenlet az 1 jelű csomóponton:
0uKKK 13212111 =⋅+⋅+⋅ θθ
ahol a K merevségi elemek fizikai tartalma rendre a következő:
K11 - a θθθθ1=1 és θ2=u=0 elmozdulások alapján kapott deformált alakból származó rúdvégi belső nyomatékok összege a 1 jelű csomóponton, az adott példa esetén (8a ábra) :
22112,1,11,1,111 ksksMMK ⋅+⋅=+=
K12 - a θθθθ2=1 és θ1=u=0 elmozdulások alapján kapott deformált alakból származó rúdvégi nyomaték az 1 jelű csomóponton, az adott példa esetén (8b ábra):
1111,2,112 kcsMK ⋅⋅==
K13 - az u=1 és θ1=θ2=0 elmozdulások alapján kapott deformált alakból származó rúdvégi nyomatékok összege az 1 jelű csomóponton, az adott példa esetén (8c ábra):
2
2222,3,113 L
k)c1(sMK ⋅+⋅==
2. egyenlet: nyomatéki egyensúlyi egyenlet a 2 jelű csomóponton:
0uKKK 23222121 =⋅+⋅+⋅ θθ
ahol a K merevségi elemek fizikai tartalma rendre a következő:
K21 = K12
K22 - a θθθθ2=1 és θ1=u=0 elmozdulások alapján kapott deformált alakból származó rúdvégi belső nyomatékok összege a 2 jelű csomóponton, az adott példa esetén (2-8d ábra) :
3"3113,2,21,2,222 ksksMMK ⋅+⋅=+=
K23 - az u=1 és θ1=θ2=0 elmozdulások alapján kapott deformált alakból származó rúdvégi nyomaték a 2 jelű csomóponton, az adott példa esetén (8e ábra):
3
3"33,3,223 L
ksMK ⋅==
3. egyenlet: erőegyensúlyi egyenlet az „összevont” 1-2 jelű csomópontokon:
HuKKK 33232131 =⋅+⋅+⋅ θθ
ahol a K merevségi elemek fizikai tartalma rendre a következő:
K31 = K13 K32 = K23 K33 - az u=1 és θ1=θ2=0 elmozdulások alapján kapott deformált alakból származó rúdvégi nyíróerők összege az 1 és 2 jelű csomópontokon, az adott példa esetén (8f ábra):
( ) ( )
23
32"22
2
2
223,3,32,3,333 L
ks
L
k
m
c1s2VVK ⋅⋅−+⋅+⋅⋅=+= ρπ

A fenti kifejezésekben és a 8 ábrán a belső M és V erők indexelése a következő szabályt követi: első index az igénybevétel helyét, második index az igénybevételt kiváltó elmozdulást, harmadik index a rúdelemet jelöli. A fentiek alapján felírhatjuk a (36) egyensúlyi egyenlet mátrix alakját:
( )
( ) ( ) ( )
=
⋅
⋅⋅−+⋅+⋅⋅⋅⋅+⋅
⋅⋅+⋅⋅⋅
⋅+⋅⋅⋅⋅+⋅
H
0
0
u
L
ks
L
k
m
c1s2
L
ks
L
kc1s
L
kskskskcs
L
kc1skcsksks
2
1
23
32"22
2
2
22
3
3"3
2
222
3
3"33
"311111
2
2221112211
θθ
ρπ
(39)
A (39) egyensúlyi egyenletrendszer megoldásával a következő szakaszban foglalkozunk.
8. ábra. A belső nyomatékok és nyíróerők egységnyi elmozdulásokból. 3.3 Egyensúlyi egyenletrendszer megoldása A (39) egyensúlyi egyenletrendszer szimmetrikus és nemlineáris, ugyanis a K merevségi mátrix elemei a rudakban ébredő normálerőktől függenek. Amennyiben a jobb
M1,1,2=s2⋅k2
θ1=1
M1,1,1=s1⋅k1 M1,2,1=s1⋅c1⋅k1
θ2=1
M1,3,2=s2⋅(1+c2)⋅k2/L2
u=1
M2,2,3=s” 3⋅k3
M2,2,1=s1⋅k1
M2,3,3=s” 3⋅k3/L3
a) b) c)
d) e)
Mx
( )2
2
2
2
222,3,3 L
k
m
c1s2V ⋅+⋅⋅= ( )
2
3
32
3,3,3 L
k"sV ⋅⋅−= ρπ

oldalon az F tehervektor nem zérus, akkor a teherparaméter növelésével a modell elmozdulása (deformációja) is növekszik, ami a normálerők eloszlásának változásával jár. Ebben az esetben a modell viselkedése a 5 ábrán vázolt határpontos viselkedéshez hasonlít. Mivel az egyensúlyi egyenletrendszert a kis elmozdulások elve alapján írtuk fel, az egyensúlyi útvonal végtelenhez tartó elmozdulásnál tart az Fmax tehermaximumhoz (9 ábra). A modellek ilyen típusú nemlineáris vizsgálatával a továbbiakban nem foglalkozunk.
9. ábra. A rúdszerkezeti modell nemlineáris viselkedése és a kritikus terhe.
Amennyiben a (39) egyensúlyi egyenletrendszer jobb oldalán a tehervektor zérus, azaz a példánk esetében H→ 0, akkor a
0UK =⋅ (40)
mátrixegyenlet nem triviális (U≠0) megoldása a
0)det( =K (41)
feltételre vezet. Amennyiben az egyparaméteres teherrendszer teljesíti a (42) feltételt, akkor a teher megfelel a szimmetrikus stabilis elágazáshoz tartózó kritikus tehernek. A rugalmas stabilitásvizsgálat (41) szerint történő végrehajtása során feltételezhetjük, hogy kritikus állapotban a rudakban ébredő normálerők megegyeznek a kezdeti (elsőrendű) normálerőkkel. A számítás néhány (legfeljebb három) szabadságfokig kézzel is könnyen végrehajtható (4 Példa).
Fcr
u
Fmax
F
„harmadrendű” megoldás
„másodrendű” megoldás
Lineáris stabilitásvizsgálat eredménye

4 Példa
Határozzuk meg az ábrán vázolt szerkezeti modell kritikus terhét!
A modell viselkedése (kihajlása) az alábbi két független elmozdulással (szabadságfokkal) írható le, ahol θ a sarokcsomópont elfordulása és u a gerenda csomópontjainak összevont eltolódása:
A modell merevségi mátrixa a 2.1 szakasz alapján az alábbi ábra segítségével állatható össze:
Kezdetben az 1 jelű rúdban nem ébred normálerő, ezért
3s"1 =
A két rúd azonos keresztmetszetű és hosszú, ezért
LLL
kkk
21
21
====
A merevségi mátrix a 2-es index elhagyásával az alábbi formában írható:
L
L
Pcr=?
1
2 Keresztmetszet: HEA 200 Anyagminősség: S235 Rúdhossz: L=6,0 m
θ u
=
u
θU
u=1 ; θ =0
s” 1⋅k1
s” 2⋅k2 s” 2⋅k2/L2 (s”2-π2⋅ρ2)k2/L2
2
θ =1 ; u=0
( )
⋅⋅−⋅
⋅⋅+⋅=
22
22
2"2
2
2"2
2
2"22
"21
"1
L
ks
L
ks
L
ksksks
ρπK

A kritikus állapot feltétele, hogy a merevségi mátrix determinánsa zérus értéket vegyen fel:
( ) ( )[ ] 0L
kss3s)det( 2
22"
cr2"" =⋅−⋅−⋅+= ρπK
Tehát keressük a ρcr értékét, ahol a kapcsos zárójelben lévő kifejezés zérus értéket vesz fel. A számítás például próbálgatással (try & error) is elvégezhető:
ρ s c s” π2⋅ρ det(K)
0,120 3,840 0,532 2,755 1,184 1,448 0,130 3,826 0,534 2,733 1,283 0,844 0,140 3,812 0,537 2,712 1,382 0,244 0,150 3,799 0,540 2,691 1,480 -0,353 0,144 3,807 0,538 2,703 1,421 0,004
A számítás szerint a ρcr=0,144 értéknél a merevségi mátrix determinánsa közelítőleg zérus értéket vesz fel, azaz a modell kritikus állapotba kerül. A kritikus erő:
==
=⋅=
=⋅⋅=
635,21
kN307PP
kN2135L
IEP
cr
Ecrcr
2
2
E
ρυ
ρ
π
A kihajlás alakját az ábra mutatja. 4. Összefoglalás A fejezetben nyomóerővel terhelt és síkban elmozduló rúdelemek merevségét határoztuk meg egyensúlyi differenciálegyenlet segítségével, a másodrendű elmélet közelítő feltevései alapján. A fajlagos merevségeket a normálerőtől függő stabilitásfüggvényekkel fejeztük ki. Az így meghatározott merevségek a másodrendű elmélet keretein belül érvényesek. Amennyiben a normálerőt zérusnak választjuk, akkor a stabilitásfüggvények értékei az elsőrendű elmélet szerinti merevségi konstansokat adják meg. A másodrendű merevségeket befogott és csuklós végű rúdelemre is meghatároztuk. Bemutattuk, hogy a másodrendű merevségek számos különleges esetre is meghatározhatóak, és a megfelelő kifejezések a szakirodalomban megtalálhatóak. Megállapítottuk, hogy az egyre összetettebb megoldásokat a számítás kapacitásigényének minimalizálása, azaz az ismeretlenek számának csökkentése kényszeríttette ki. Kimondtuk, hogy a mai számítási kapacitás mellett a stabilitásfüggvényes megoldások gyakorlati jelentősége jelentősen csökkent. Ugyanakkor azt is megállapítottuk, hogy a mérnökképzésben didaktikai szempontból fontosnak tartjuk az alapesetek ismeretét és kézi számításban történő alkalmazását. Bemutattuk az összetett rúdszerkezeti modellek vizsgálatának általános módszertanát „kézi” számítás esetére. Az eljárást a matematikából ismert mátrix-módszer és a mechanikából ismert elmozdulás-módszer kombinációjára alapoztuk. Bemutattuk, hogy az eljárás két alapfeladatra vezet. Amennyiben a tehervektor nem zérus, akkor határpontos
( )
⋅⋅−⋅
⋅⋅+=
22""
""
L
ks
L
ks
L
ksk)3s(
ρπK

elágazási feladatra jutunk, amely nemlineáris egyenletrendszer megoldására vezet. Amennyiben a tehervektor zérus, akkor a tökéletes modell kritikus elágazásának feladatára jutunk, ami a merevségi mátrix determinánsa első gyökének meghatározását jelenti. A módszer alkalmazását számpéldával illusztráltuk.



























![TUDOMÁNYOS DIÁKKÖRI DOLGOZAT · A végeselem-módszer kialakulása [1] A mérnöki gyakorlatban jelentkező szerkezetek nagy része rugalmas anyagból készül, s a terhelés bizonyos](https://img.pdfslide.tips/doc/110x75/5e484fc81e9333353d794b24/tudomnyos-dikkri-a-vgeselem-mdszer-kialakulsa-1-a-mrnki-gyakorlatban.jpg)