Embed Size (px)
Citation preview

Equilíbrio de Corpos RígidosAtrito
Conteúdo
1 Introdução 2
2 Equilíbrio de uma partícula 3
3 Equilíbrio de corpo rígido 43.1 Corpos rígidos e o princípio da transmissibilidade . . . . . . . . . . . . . . . . . . 43.2 Equações de equilíbrio de um corpo rígido . . . . . . . . . . . . . . . . . . . . . . 43.3 Equilíbrio de um corpo submetido a duas ou três forças . . . . . . . . . . . . . . . 63.4 Problemas planos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 73.5 Forças exteriores e interiores . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 83.6 Diagrama de corpo livre . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 103.7 Determinação de reações ou de forças de ligação . . . . . . . . . . . . . . . . . . 113.8 Alguns tipos de ligações ao exterior . . . . . . . . . . . . . . . . . . . . . . . . . . 113.9 Exemplo de aplicação . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 143.10 Limites ao valor das reações ou forças de ligação . . . . . . . . . . . . . . . . . . 153.11 A linha de ação da reação normal e a verificação ao derrubamento . . . . . . . . 153.12 Determinação de posições de equilíbrio . . . . . . . . . . . . . . . . . . . . . . . . 17
4 Atrito 194.1 Introdução . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 194.2 Leis do atrito seco. Coeficientes de atrito . . . . . . . . . . . . . . . . . . . . . . . 194.3 Ângulo de atrito e plano inclinado . . . . . . . . . . . . . . . . . . . . . . . . . . 214.4 Atrito cinético e as equações do movimento . . . . . . . . . . . . . . . . . . . . . 224.5 Atrito em cabos e correias . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 234.6 Metodologia para resolução de problemas . . . . . . . . . . . . . . . . . . . . . . 254.7 Exemplo de aplicação . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
1

1 Introdução
Este texto aborda a estática dos corpos rígidos, ou seja, ocupa-se das condições necessárias esuficientes para que um corpo esteja em repouso.
Começa-se por rever as condições de equilíbrio de uma partícula, para depois se generalizaressas condições ao equilíbrio de corpos rígidos. Discutem-se conceitos fundamentais tais comoo diagrama de corpo livre, a distinção entre forças exteriores e interiores e os tipos de ligaçõesao exterior. Finalmente, aborda-se as leis do atrito seco e a forma como essas leis afetam osproblemas de equilíbrio de corpos.
Os conceitos são ilustrados através de problemas envolvendo a determinação de forças deligação, o cálculo de forças aplicadas que tornam o movimento iminente e, ainda, a procura deposições de equilíbrio.
O autor agradece aos professores António Pinto da Costa e Carlos Tiago o trabalho de revisãodo texto e as sugestões dadas.
2

2 Equilíbrio de uma partícula
De acordo com as leis de Newton, uma partícula está em equilíbrio se a resultante das forças quenela atuam for nula.
−→R =
n∑i=1
−→Fi =
−→0
Esta equação é a base de toda a estática, valendo a pena tecer alguns comentários que tornem oseu significado mais preciso.
Em primeiro lugar, de acordo com a segunda lei de Newton,−→F = m−→a , se a força é nula
conclui-se apenas que a aceleração é nula, podendo dar-se o caso de a partícula se mover comvelocidade constante. No presente contexto, da estática da partícula e do corpo rígido, estamosessencialmente interessados em saber se o equilíbrio existe ou não, isto é, se é possível um corpose manter em repouso quando submetido a uma dada solicitação. Assim, por uma questão desimplicidade, identificamos equilíbrio com repouso, isto é, admitimos que na ausência de forçasa partícula está em repouso.
Em segundo lugar, a utilização da palavra partícula quer apenas dizer que a forma e asdimensões do corpo em consideração não desempenham um papel relevante na análise do pro-blema e que se pode admitir que todas as forças intervenientes estão aplicadas num mesmoponto. Como se verá mais à frente, o equilíbrio de um corpo rígido não pode ser sempre enca-rado como o equilíbrio de uma partícula já que as linhas de acção de todas as forças interveni-entes nem sempre concorrem no mesmo ponto.
Em terceiro lugar, a equação de equilíbrio refere-se à resultante das forças que atuam numadada partícula. Como sabemos, a força é uma grandeza vetorial — caracterizada, portanto, poruma intensidade e direcção — que representa a acção de um corpo sobre outro. A resultantedas forças é obtida pela soma vetorial das várias forças intervenientes, a qual segue as regrashabituais (regra do paralelogramo, ou recorrendo à decomposição dos vetores em componentescartesianas). Se a resultante é nula, tal como requerido para que haja equilíbrio da partícula,então o polígono correspondente à soma de todas as forças é fechado (ver figura 1).
F1
F2
F3
F4
F5
F1F2
F3
F4
F5
Figura 1: Partícula em equilíbrio sobre a ação de cinco forças. Polígono de forças.
3

3 Equilíbrio de corpo rígido
3.1 Corpos rígidos e o princípio da transmissibilidade
Um corpo rígido é uma idealização na qual se consideram as dimensões reais de um corpo aomesmo tempo que se admite que a distância entre quaisquer dois pontos do corpo se mantéminalterada. É portanto mais realista que a idealização de partícula, mas não contempla a de-formação do corpo, abordada na Mecânica dos Corpos Deformáveis em geral e na Resistência deMateriais em particular.
⇔ <
Figura 2: Importância da linha de ação das forças atuando num corpo rígido. Embora asforças atuantes sejam as mesmas nos três casos, apenas a partícula e o corporígido da esquerda se encontram em equilíbrio. O corpo rígido da direita terátendência a rodar no sentido horário.
Na análise do equilíbrio de uma partícula basta saber quais as forças aplicadas à partícula.Já na análise do equilíbrio de um corpo rígido, onde as dimensões do corpo são consideradasrelevantes, passa também a ser importante saber onde é que as forças atuantes estão aplicadas.Na figura 2 ilustra-se essa importância.
Por outro lado, como se admite que o corpo é rígido aplica-se o princípio da transmissibili-dade, segundo o qual o efeito de uma força sobre o equilíbrio de um corpo rígido não se alterase a força se mover ao longo de uma linha que contém a própria força, deslizando para a frenteou para trás mas não na direcção transversal à força. Isto significa que, em termos de equilíbrio,o efeito de uma força sobre um corpo rígido fica totalmente definido se conhecermos a força e asua linha de ação — ver figura 3.
F
F
⇔
Figura 3: Princípio da transmissibilidade. Os efeitos de uma força no equilíbrio de umcorpo rígido não se alteram se a força for aplicada noutro ponto da sua linha deação.
Acrescente-se que se estivéssemos interessados em analisar a deformação do corpo ou sim-plesmente as forças internas instaladas no corpo, o princípio da transmissibilidade não se apli-caria e seria fundamental conhecer o ponto de aplicação das forças. Como se mostra na figura4, a resposta de um corpo (muito) deformável é totalmente diferente consoante se puxam ouse empurram as suas extremidades. Além disso, a equivalência referida para os corpos rígi-dos limita-se ao equilíbrio, não sendo válida em termos de esforços internos como veremos emcapítulos mais à frente.
3.2 Equações de equilíbrio de um corpo rígido
Como no estudo do equilíbrio dos corpos rígidos as forças se comportam como vetores deslizantes,aplica-se a teoria dos sistemas de vetores estudada anteriormente. De acordo com esta teoria
4

Corpo rígido
Corpo deformável
⇔
<
Figura 4: Importância do ponto de aplicação das forças. Para analisar o equilíbrio de umcorpo rígido é indiferente trocar os pontos de aplicação das duas forças represen-tadas, dado que elas têm a mesma linha de ação. Mas o comportamento de umcorpo deformável é totalmente diferente se essa mesma troca for efetuada.
qualquer sistema de forças pode ser representado pelos seus elementos de redução num pontoA: a resultante
−→R e o momento resultante nesse ponto
−→MA. No caso de um sistema constituído
por n forças, tem-se (ver figura 5)
−→R =
n∑i=1
−→Fi
−→MA =
n∑i=1
−−→APi ×
−→Fi
onde Pi é um ponto da linha de ação de cada uma das n forças−→Fi. As forças
−→Fi podem repre-
sentar cargas concentradas ou a resultante de cargas distribuídas.
−→F2
⇔
−→F1
−→F3
−→Fn
−→Fi
−→R
−−→MA
AA
P1
P2
P3Pi
Pn
...
...
Figura 5: Redução num ponto A de um sistema de forças atuando num corpo rígido. Ocorpo rígido estará em equilíbrio se a resultante
−→R e o momento resultante
−→MA
forem nulos.
Dos quatro possíveis casos de redução, o equilíbrio de um corpo rígido corresponde ao casode sistema equivalente a vetor nulo, isto é, ao caso em que
−→R =
−→0
−−→MA =
−→0
Na prática estas duas equações vetoriais podem ser decompostas nas suas componentes cartesi-anas, relativas a um referencial (x, y, z), correspondendo a seis equações de equilíbrio escalares,
Sendo nulos os elementos de redução no ponto A, a aplicação da fórmula de propagação de
5

momentos permite concluir facilmente que também se tem−→R =
−→0
−−→MB =
−−→MA +
−−→BA×
−→R =
−→0 +−−→BA×−→0 =
−→0
qualquer que seja o ponto B. Este resultado já era conhecido da teoria dos sistemas de vetores,na qual a classificação do caso de redução de um sistema é feita com base nos elementos de re-dução calculados num ponto arbitrário, mas convém recordá-lo dada a relevância para a análisedo equilíbrio dos corpos rígidos, sendo importante destacar dois aspetos.
Em primeiro lugar, observa-se que o ponto escolhido para efetuar a redução do sistemade forças é irrelevante, podendo mesmo ser um ponto que não pertence ao corpo rígido. Esteaspeto é importante porque a resolução de alguns problemas fica muito facilitada quando seescreve a equação de momentos num ponto particular (por exemplo, o ponto que correspondeà intersecção das linhas de ação de duas forças desconhecidas).
Por outro lado, faz-se notar que as 3 equações de momentos no ponto B são linearmentedependentes das 6 equações correspondentes ao equilíbrio de forças e de momentos no ponto A.Dito de outro modo, uma vez garantido o equilíbrio de forças e de momentos num ponto, nãoadianta escrever mais equações de momentos noutros pontos, já que elas não acrescentam maisinformação. Isto significa que só é possível escrever seis equações independentes para o equilíbriode um corpo rígido.
3.3 Equilíbrio de um corpo submetido a duas ou três forças
Se um corpo está em equilíbrio, a resultante das forças atuantes tem de ser evidentemente nula.Mas para além deste resultado geral é possível concluir algo sobre as linhas de ação das forças,quando o número destas não excede três. Essas conclusões podem facilitar a formulação ou aresolução de alguns problemas, pelo que vale dispender-lhes alguma atenção.
duas forças
Admita-se então um corpo rígido em equilíbrio, sobre a acção de duas forças,−→FA aplicada em A
e−→FB aplicada em B. Calculando os elementos de redução em A e igualando-os a zero tem-se
−→R =
−→FA +
−→FB =
−→0
−−→MA =
−−→AB ×
−→FB =
−→0
Da primeira equação conclui-se que−→FB = −
−→FA, enquanto que a segunda permite estabelecer
que o vetor−−→AB é paralelo a
−→FB e, portanto também a
−→FA.
Dito de outro modo, se um corpo rígido está em equilíbrio sobre a ação de apenas duas forças,então elas têm a mesma intensidade e direcção, mas sentidos opostos, e, para além disso, partilhama mesma linha de ação (ver figura 6).
três forças
Considere-se agora o caso de o corpo rígido estar em equilíbrio sob a acção de três forças,−→FA
aplicada em A,−→FB aplicada em B, e
−→FC aplicada em C.
Em primeiro lugar, mostra-se que as forças são complanares. Considere-se, por exemplo, aequação de equilíbrio de momentos em torno do eixo AB,1
MAB =(−→AA×
−→FA +
−−→BB ×
−→FB +
−→AC ×
−→FC
)·−−→AB
|AB|= 0 ⇒
−→AC ×
−→FC ·
−−→AB = 0
1Recorde-se que para calcular o momento de uma força em relação a um eixo basta calcular o momento numponto desse eixo e projetar no eixo (fazendo o produto interno com o versor do eixo). Neste caso, escolhemoscalcular o momento das forças
−→FA e
−→FC no ponto A e da força
−→FB no ponto B.
6

−→FB
A
B
C
−→FA
−→FC
D
A
−→FA
−→FBB
Figura 6: Corpo em equilíbrio sob a acção de duas ou três forças. A linha de ação das duasúnicas forças atuando num corpo é partilhada. Se três forças estão em equilíbrio,as suas linhas de ação intersectam-se num mesmo ponto (a única excepção é seforem todas paralelas).
As duas forças−→FA e
−→FB não provocam momentos por estarem aplicadas no eixo, concluindo-
-se que o momento da terceira força,−→FC , será também forçosamente nulo, o que só acontece
se a sua linha de ação intersectar o eixo AB ou lhe for paralela. Em qualquer dos casos, issosignifica que a força
−→FC deve necessariamente pertencer ao plano definido pelos três pontos
ABC. Repetindo o mesmo argumento para cada uma das outras forças (escrevendo as equaçõesde momentos relativamente aos eixos AC e BC), concluímos que as três forças devem sercomplanares, pertencendo todas ao plano ABC.
Estabelecida a complanaridade, há então que considerar duas possibilidades: ou as forçassão todas paralelas, ou então as linhas de ação de duas das forças têm que forçosamente seintersectar, num ponto D do plano ABC. Mas, escrevendo a equação de momentos no ponto De igualando-a a zero, concluiremos que a linha de ação da terceira força também tem que passarnesse mesmo ponto.
Em resumo: se três forças estão em equilíbrio, a sua resultante é nula e, além disso, ou sãoparalelas ou as respetivas linhas de ação são concorrentes (figura 6).2 Note-se que o ponto deintersecção das linhas de ação não pertence necessariamente ao corpo.
3.4 Problemas planos
Se todas as forças que atuarem num corpo estiverem contidas no mesmo plano, é possível sim-plificar a análise do problema utilizando apenas três equações de equilíbrio.
De facto, se o plano que contem as forças for definido por z = 0, verifica-se que: (i) todasas forças apenas têm componentes segundo x e y e (ii) o momento de qualquer força calculadonum ponto desse plano, sendo obtido através do produto externo de dois vetores contidos noplano xy, apenas tem componente segundo z.
Então, das seis equações de equilíbrio de um corpo rígido, três estão automaticamente satis-feitas, havendo apenas que verificar as três restantes:
Rx = 0 Ry = 0 MAz = 0
Em conformidade, o número de equações independentes de equilíbrio de um corpo rígido noplano é de três.
Para além desta redução do número de equações, não há grande diferença nos conceitos quese abordam de seguida.
2O presente argumento exige que os três pontos não fossem colineares para que faça sentido definir um planocom base nos 3 pontos. Mas, se as três forças não forem paralelas, é sempre possível encontrar três pontos A, B eC, um da linha de ação de cada força, que sejam não colineares. E, se forem paralelas, a conclusão final é verificadalogo à partida.
7

3.5 Forças exteriores e interiores
Embora em abstrato um corpo rígido seja muitas vezes representado como uma massa perfei-tamente delimitada a flutuar no espaço, na prática a idealização de um corpo rígido pode serutilizada de muitas formas distintas. Exemplos de entidades que podem ser encarados comocorpos rígidos incluem:
• corpos isolados, como por exemplo um bloco de pedra ou uma barra de aço;
• um conjunto de corpos ligados entre si, como por exemplo um automóvel3 formado porvárias peças ou uma estrutura formada por várias barras;
• uma parte de um objeto maior, como por exemplo um pilar inserido numa estrutura ou ocabo de um martelo.
Na verdade, a distinção entre estes casos é um pouco difusa, sendo o ponto importante o facto deum corpo rígido ser qualquer entidade cuja deformação (ou movimento interno) não é relevantee que interage com o mundo exterior através de forças.
No caso de uma partícula, sem dimensões, todas as forças aplicadas têm origem externa.No caso de um corpo rígido — que, como dissemos, pode inclusivamente corresponder a umconjunto de corpos ligados entre si —, é importante classificar as forças em dois tipos: (i) forçasexteriores e (ii) forças interiores.
As forças exteriores têm origem no exterior do corpo rígido considerado e representam aacção dos outros corpos sobre o corpo rígido em análise. Incluem o peso do próprio corpo, opeso de outros corpos suportados pelo corpo, outras forças de contacto exercidas por corposadjacentes, as reações dos apoios que se opõem ao movimento do corpo, ou, de um modo geral,qualquer força com origem externa (a força transmitida por uma corda que puxa o corpo ou aforça exercida pelo vento, por exemplo). Atente-se que o peso próprio do corpo é uma força queestá aplicada no interior do corpo, mas não deixa por isso de ser uma força exterior, na medidaem que é a força de atração gravítica exercida pelo planeta Terra — tendo, portanto, origem noexterior do corpo — sobre o próprio corpo rígido.
Em contrapartida, as forças interiores são forças exercidas por uma parte do corpo rígidosobre outra parte do mesmo corpo. São essas forças que asseguram a coesão do corpo rígido,mantendo as suas diferentes partes unidas num todo, ou que correspondem simplesmente ainterações entre as diversas componentes do corpo.
Como é evidente, a classificação de uma força em exterior ou interior depende de qual é ocorpo rígido em análise.
O exemplo simples da pilha de três blocos de peso P representada na figura 7 permite ilustraro conceito. Cada um dos blocos está sujeito ao peso próprio e à força de contacto com os blocosvizinhos e/ou a força exercida pelo chão. Por exemplo, as forças exteriores que atuam no blocoinferior são o seu peso P , a força de contacto com o bloco do meio R2 e a força R3 de reacçãodo chão. No entanto, se analisarmos a pilha toda como um único corpo, as forças exteriores sãosimplesmente os pesos dos três blocos e a reacção do chão. Para a análise da pilha as forças R1
e R2 constituem dois pares de forças interiores.Mas as forças interiores não se esgotam nas forças R1 e R2, existindo também no interior de
cada bloco. Se imaginarmos que dividimos cada bloco em vários pedaços, na análise do equi-líbrio de cada fragmento teríamos que considerar as forças de ligação que existem entre essesvários pedaços. Na prática, no interior de um corpo rígido existem inúmeras forças de ligação,já que se trata de um corpo contínuo que pode ser dividido também de inúmeras maneiras.
3Pode parecer um pouco forçado idealizar um automóvel como um corpo rígido, mas há situações em que issofaz sentido. Para analisar o equilíbrio de um automóvel sobre um viaduto ou sobre um camião de transporte érazoável admitir que o movimento das partes móveis do automóvel — rodas, volante, motor, etc — não é relevantee, portanto, pode ser simplesmente ignorado.
8

R3
P
P
P
P
P
P
R3
R2
R2
R1
R1
Figura 7: Equilíbrio de uma pilha de três blocos. Diagramas de corpo livre e distinção entreforças exteriores e forças interiores. As forças R1 e R2 são exteriores quando osblocos são analisados individualmente mas são interiores na análise da pilhacomo um todo, podendo ser ignoradas.
Esta multiplicidade de forças interiores não é um problema uma vez que não é necessárioconsiderar as forças interiores na análise do equilíbrio de um corpo rígido. Por exemplo, oequilíbrio da pilha envolve apenas as forças exteriores P e a reacção R3. A justificação resideno facto de as forças interiores R1 e R2 se anularem duas a duas por constituirem sempre paresação-reação.
A análise do equilíbrio de um corpo nada diz sobre se as forças interiores são ou não capazesde assegurar que o corpo em análise se comporta rigidamente. Quando se analisa a pilha comoum único corpo rígido, admite-se que os movimentos relativos entre blocos estão excluídos àpartida, hipótese essa que pode não ser válida — por exemplo, é possível puxar o bloco superiorpara cima de forma a desfazer a pilha. Uma avaliação do «comportamento de corpo rígido»pode assim necessitar da determinação das forças interiores, calculadas com base no equilíbriode cada um dos três corpos rígidos distintos.
Apesar da simplicidade deste exemplo é importante reconhecer que o conceito fundamentalé geral: apenas as forças exteriores devem ser consideradas nas equações de equilíbrio de um corporígido.4
4Inclui-se aqui uma explicação um pouco mais formal, aplicável a um corpo genérico submetido a forças arbitrá-rias. Encare-se o corpo como um sistema de n partículas. Distinguido explicitamente entre forças exteriores (comorigem no exterior do corpo) e forças interiores (resultam da interação entre as várias partículas que pertencem aocorpo), a força atuante em cada partícula pode ser expressa por
−→Fk =
−→Fk
ext +−→Fk
int
Para a partícula estar em equilíbrio é necessário que a força total que atua partícula seja nula, isto é,
−→Fk =
−→0
De acordo com a terceira lei de Newton (lei da ação e reação), o sistema de forças interiores é constituído por paresde forças iguais em intensidade, com a mesma linha de ação e sentidos opostos. Cada um desses pares de forçasinteriores é pois equivalente a zero e, consequentemente, o sistema constituído por todas as forças interiores do
9

3.6 Diagrama de corpo livre
Como consequência dos aspetos focados até agora, pode concluir-se que, para resolver um pro-blema de equilíbrio de corpo rígido, é fundamental identificar de forma clara (i) qual é o corpoa analisar, (ii) quais as forças exteriores que nele atuam e (iii) qual é a linha de ação de cadauma das forças atuantes.
A melhor forma de lidar com estas questões é desenhar em primeiro lugar o diagrama decorpo livre (DCL). O correto traçado deste diagrama, antes de escrever equações, é meio caminhoandado para a resolução correta de um dado problema. Na verdade, constata-se que grandeparte dos erros cometidos na resolução de problemas de equilíbrio têm origem na ausência deou num incorreto diagrama de corpo livre, frequentemente omitindo forças ou considerandoforças que não atuam no corpo em causa.
Para desenhar este diagrama começa-se por selecionar qual o corpo a analisar, desenhando-oseparadamente do mundo exterior. O desenho pode ser esquemático, mas é importante lembrarque as dimensões do corpo são importantes, especialmente aquelas que dizem respeito à locali-zação das forças que nele atuam.
Em seguida, todas as forças exteriores aplicadas ao corpo são representadas, devendo-se tero cuidado de identificar claramente qual o ponto de aplicação ou qual a linha de ação de cadauma delas. Apenas as forças exercidas pelo exterior sobre o corpo devem ser incluídas. Nem (i)as forças interiores ao corpo nem (ii) as forças exercidas pelo corpo sobre outros corpos — estasúltimas de sentido contrário às forças exercidas sobre o corpo — devem ser incluídas.
Na maior parte dos problemas, existem forças que são conhecidas à partida. É o caso dopeso do próprio corpo, ou as forças que lhe são aplicadas para um dada finalidade. Conhece-se,portanto, a completa definição destas forças, incluindo intensidade, direção e sentido.
Em contrapartida, existem forças que são desconhecidas à partida. Estas forças resultamgeralmente do contacto com outros corpos e é através delas que o corpo é mantido em repouso.Sendo forças que se opõem ao movimento, são designadas por forças de reacção ou, ainda, porforças de ligação. À partida desconhece-se a intensidade e sentido destas forças, mas muitas vezeso conhecimento do tipo de ligação permite conhecer a sua direção ou quais as suas componentesque devem ser consideradas.
Considere-se novamente o exemplo simples da figura 7, no qual é suficiente considerar ape-nas forças verticais e as correspondentes equações de equilíbrio na direcção vertical. Na figura
sistema de partículas é também nulo. Então, os seus elementos de redução calculados num ponto O qualquer são
n∑k=1
−→Fk
int =−→0
n∑k=1
−→rk ×−→Fk
int =−→0
onde −→rk =−−→OPk é a posição da késima partícula relativamente ao ponto O. Segue-se que os elementos de redução do
sistema de forças exteriores e do sistema de forças total são idênticos, isto é
n∑k=1
−→Fk =
n∑k=1
−→Fk
ext +
n∑k=1
−→Fk
int =n∑k=1
−→Fk
ext
n∑k=1
−→rk ×−→Fk =
n∑k=1
−→rk ×−→Fk
ext +n∑k=1
−→rk ×−→Fk
int =
n∑k=1
−→rk ×−→Fk
ext
Para o corpo rígido estar em equilíbrio, o sistema de forças total tem que ser equivalente a sistema nulo. Tirandopartido das equações precedentes, conclui-se que
−→R =
n∑k=1
−→Fk =
n∑k=1
−→Fk
ext =−→0
−−→MO =
n∑k=1
−→rk ×−→Fk =
n∑k=1
−→rk ×−→Fk
ext =−→0
ou seja, apenas as forças exteriores necessitam de ser contabilizadas para a escrita das equações de equilíbrio.
10

é possível observar os diagramas de corpo livre de cada um dos blocos vistos isoladamente e,ainda, como alternativa, o diagrama de corpo livre da pilha encarada como um único corpo.5
Neste exemplo, as forças P , correspondentes ao peso dos blocos, são as forças conhecidase as forças de ligação R1, R2 e R3 são as forças de ligação ou reacção desconhecidas. Umadiscussão mais detalhada da natureza dos vários tipos de ligação é levada a cabo na secção 3.8.
3.7 Determinação de reações ou de forças de ligação
Os problemas de equilíbrio são muitas vezes formulados para determinar qual o valor das forçasde ligação correspondentes a uma determinada posição de equilíbrio.
Uma vez concluído o diagrama de corpo livre, a escrita das equações de equilíbrio (forças emomentos), contabilizando a contribuição de todas as forças aplicadas ao corpo, conduz a umsistema de equações lineares, sendo as incógnitas o valor das forças de ligação desconhecidas.
Este sistema de equações pode ser (i) impossível, (ii) determinado ou (iii) indeterminado.6
Quando o sistema é impossível, significa simplesmente que as ligações ao exterior não são sufi-cientes para manter o corpo em equilíbrio sob a acção das forças que lhe estão aplicadas. Nosoutros casos, o equilíbrio é sempre possível, mas nem sempre permite, por si só, a determinaçãodas forças de ligação.
Voltando ao exemplo da pilha, escrevendo a equação de equilíbrio na direcção vertical paracada um dos três blocos tem-se
R1 − P = 0 R2 − P −R1 = 0 R3 − P −R2 = 0
Estas equações no seu conjunto permitem a determinação de todas as forças desconhecidas,
R1 = P R2 = 2P R3 = 3P
Em alternativa, se analisarmos o diagrama de corpo livre da pilha, concluiremos que R3 = 3P ,sem necessidade de determinar ou sequer de considerar as forças R1 e R2. Em qualquer dasabordagens (blocos ou pilha), o equilíbrio é, neste caso, estaticamente determinado.
Note-se que em muitos casos, desconhece-se à partida qual é o sentido das componentes dasreações ou das forças de ligação. Na prática, arbitra-se inicialmente um sentido para cada umadessas componentes, devendo as equações de equilíbrio refletir essa opção — por exemplo, aforça R1 aparece com sinal positivo na primeira equação e com sinal negativo na segunda. Ovalor dessas componentes resulta da solução das equações de equilíbrio, admitindo, evidente-mente, que o problema é estaticamente determinado. Se o valor obtido for negativo, significasimplesmente que o sentido correto é o oposto ao arbitrado inicialmente.
3.8 Alguns tipos de ligações ao exterior
Para enfrentar problemas de equilíbrio gerais, mais complicados, é conveniente discutir os tiposde ligação que podem existir entre um corpo rígido e o mundo exterior em que se insere.
Em muitos casos, admite-se que um determinado deslocamento é nulo em absoluto. Diz-seentão que existe um apoio ao qual corresponde uma reacção. Noutros casos, admite-se que, pelofacto de dois corpos estarem ligados ou em contacto, existe um deslocamento que é comum aosdois corpos. Nesta situação, é o deslocamento relativo que é nulo e não o deslocamento absoluto.Esta ligação é concretizada através de um par de forças de ligação de sentidos opostos, devendocada uma das forças desse par ser considerada no equilíbrio do respetivo corpo.
5Observe-se que, face ao caráter deslizante das forças, existe alguma liberdade na forma como as forças sãodesenhadas na prática. Para o desenho ficar mais fácil de ler pode ser vantajoso se a ponta da seta do vetor querepresenta uma força corresponder ao efetivo ponto de aplicação dessa força (e não a extremidade inicial do vetor),como acontece aqui com as forças R1 a R3.
6Esta questão está fortemente relacionada com o conceito de estatia externa, estudado noutro capítulo da matéria.
11

Fora estas diferenças (deslocamento absoluto ou relativo nulo), o tratamento das forças dereacção e das forças de ligação é muito semelhante. De um modo geral, existe uma força dereacção ou de ligação por cada movimento impedido ou grau de liberdade restringido. Comoo número de graus de liberdade de um corpo rígido são seis — três translações e três rotações—, cada apoio ou ligação a outro corpo dá origem a uma força e/ou momento de ligação nummáximo de seis componentes independentes. Descrevem-se de seguida alguns tipos de ligaçãoque surgem frequentemente na análise do equilíbrio de corpos rígidos — ver figura 8.
Figura 8: Alguns tipos de apoios e a identificação das componentes das respetivas forçase momentos de reacção: encastramento, dobradiça (os momentos de reação po-dem ou não ser considerados), contacto simples com e sem atrito (não havendoatrito, apenas a reação normal é considerada) e rolamento (roda mas não escor-rega lateralmente devido ao atrito).
Se a ligação é rígida, isso significa que todos os graus de liberdade estão constrangidos, peloque há que considerar 6 forças de ligação (forças no sentido lato, na verdade são 3 componentesde força e três componentes do momento). É o que acontece por exemplo a uma barra rigida-mente cravada numa parede ou à ligação de uma mesa a cada uma das suas pernas. Este tipode ligação é designado por ligação de continuidade ou encastramento.
Numa ligação articulada que permite a rotação relativa em torno de um eixo, não existecomponente do momento em relação a esse eixo, pelo que devem apenas ser consideradasduas componentes do momento de ligação e as 3 componentes da força de ligação. Ligaçõesdeste tipo, designam-se por apoios fixos dotados de rótulas cilíndricas e incluem como exemplosrepresentativos as dobradiças.
Note-se que nem sempre as ligações do tipo dobradiça são capazes de responder com mo-mentos de ligação (em torno dos eixos perpendiculares ao eixo da dobradiça) de valor significa-tivo, pelo que é aconselhável incluir apenas as componentes da força na modelação deste tipo deligação. Nesse caso, a ligação pode ser representada por um apoio fixo com rótula esférica. Umapoio pontual sobre uma superfície rugosa, onde as forças de atrito são suficientes para impediro deslizamento relativo, é também suscetível de ser representado por um apoio fixo.
Em contrapartida, um apoio sobre uma superfície lisa sem atrito permite mobilizar apenasuma reacção normal à superfície. Se o apoio incluir um rolamento que permite o deslizamentonuma única direcção, então existirão duas componentes da força de reacção (uma normal àsuperfície e outra tangencial à superfície, mas perpendicular ao plano do rolamento). Este tipode ligação — caracterizada por rotação livre e translação livre numas direções mas impedidanoutras — denomina-se por apoio móvel.
Na análise de estruturas, todos estes tipos de apoio — encastramento, apoio fixo, apoiomóvel — são frequentemente representados por símbolos convencionais, dos quais se mostramalguns exemplos nas figuras 9 e 10, relativos, respetivamente, a problemas tri e bi-dimensionais.Embora a utilização destes símbolos permita identificar de uma forma clara as restrições ao mo-vimento e as correspondentes reações, convem ter sempre presente que estes símbolos resultam
12

de um processo de idealização da realidade, cuja validade pode ser questionável. Em particular,chama-se a atenção para as situações analisadas na secção 3.10.
Figura 9: Representação simbólica de apoios: encastramento, apoio fixo com rótula cilín-drica, apoio fixo com rótula esférica e apoio móvel.
Figura 10: Representação simbólica de apoios no caso plano: encastramento, apoio fixo eapoio móvel.
Por fim, uma menção especial aos chamados apoios pendulares, nos quais a ligação ao exte-rior é materializada através de uma biela bi-articulada, isto é uma barra cujas duas extremidadesestão ligadas por rótulas a dois corpos. Como as únicas duas forças que atuam na barra são asaplicadas nas suas extremidades, conclui-se, com base no primeiro resultado obtido na secção3.3, que as duas forças de extremidade têm de partilhar a sua linha de ação. Se uma das ex-tremidades da barra estiver fixa ao exterior, a barra comporta-se como um apoio pendular, cujareacção tem direção conhecida, tal e qual como num apoio móvel. Esta equivalência estáticaestá ilustrada na figura 11. De resto, estes apoios também gozam de uma equivalência cinemá-tica: o deslocamento (infinitesimal) permitido por um apoio pendular coincide com os graus deliberdade de um apoio móvel.
⇔ ⇔
Figura 11: Equivalência estática entre apoios pendulares e apoios móveis. A reação trans-mitida pelo apoio pendular ao corpo rígido é vertical, pelo que a análise doequilíbrio do corpo rígido pode ser feita substituindo o apoio pendular por umapoio móvel horizontal, cuja reação é também vertical.
Uma situação muito semelhante é a da força transmitida por um cabo. Facilmente quese compreende que, dada a sua flexibilidade natural, um cabo apenas pode transmitir umaforça de tração, a qual tem a direcção do cabo e um sentido que corresponde a puxar ocorpo a que esteja ligado. Deste ponto de vista, comporta-se exatamente como uma biela coma distinção importante que apenas um dos sentidos é possível, sob pena do cabo se tornar frouxo.
13

3.9 Exemplo de aplicação
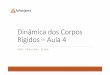
Para ilustrar a aplicação dos conceitos explicados, apresenta-se um problema resolvido. Umaplaca quadrada de lado 2L e peso P encontra-se suspensa através de 6 barras bi-articuladas,como se mostra na figura 12. Os pontos H, I e J estão todos situados a uma altura L sobre oplano da placa. Pretende-se determinar a força exercida pela barra AH sobre a placa.
A B
CD
E FH
I
J
A B
CD
E F
GNAH
NCJ
NEJNFJ
NDI
NBI
P
x y
z
L
L
L
LL
Figura 12: Placa suportada por 6 barras. Geometria e diagrama de corpo livre.
Todos os apoios são pendulares, o que, como explicado em 3.8, permite conhecer a direçãodas respetivas reações. No diagrama de corpo livre representado ao lado, representam-se essasreações de valor desconhecido (para já, admitindo que são de tração) e a única força conhecida— o peso P — atuando no centro de gravidade da placa G (o centro geométrico).
Começa-se por notar que existem exatamente 6 reações de valor desconhecido, o que à par-tida sugere que o problema seja estaticamente determinado. De facto, o valor das 6 reações podeser obtido a partir de 6 equações de equilíbrio independentes — por exemplo, as que resultamde igualar a zero os elementos de redução em E do sistema de todas as forças identificadas nodiagrama de corpo livre.
Mas, como o objetivo é determinar a força na barra AH, a resolução ficará muito facilitada seidentificarmos uma equação de equilíbrio envolvendo apenas uma das incógnitas. Acontece queas linhas de ação de todas as demais barras passam ou no ponto J ou no ponto I. Então bastarácalcular o momento em relação ao eixo JI para obter uma equação nas condições pretendidas(uma força não provoca momento em relação a um eixo que intersecta). O facto de esse eixonão pertencer ao corpo é totalmente irrelevante. Escreva-se então,∑
MJI =−→λ JI ·
−−→JH ×
−→NAH +
−→λ JI ·
−→JG×
−→P = 0
Note-se que (i) apenas são contabilizadas as duas forças que não concorrem no eixo JI, que (ii)o momento de cada força em relação ao eixo é obtido projetando o momento, calculado numponto desse eixo (o ponto J , em ambos os casos), sobre o próprio eixo, e (iii) para calcularo momento da força
−→NAH , ela pode ser considerada aplicada em qualquer ponto da sua linha
de ação (neste caso, escolheu-se o ponto H). Vetorialmente, o peso é dado por−→P = −P−→e z,
enquanto que a força na barra pode ser expressa como
−→NAH = NAH
−→λ AH = NAH
(− 1√
2−→e x +
1√2−→e z)
14

Quanto ao versor do eixo JI, ele é dado por
−→λ JI =
−→JI
|−→JI|
=1√5−→e x +
2√5−→e y
Desenvolvendo a expressão para∑MJI tem-se então∣∣∣∣∣∣∣
1√5
2√5
0
1 0 0
−NAH√2
0 NAH√2
∣∣∣∣∣∣∣+
∣∣∣∣∣∣1√5
2√5
0
1 1 −10 0 −P
∣∣∣∣∣∣ = −√
2
5NAH +
(− P√
5+
2P√5
)= 0 ⇒ NAH =
P√2
que é o resultado pretendido. Deixa-se como exercício o cálculo das outras reações.7
3.10 Limites ao valor das reações ou forças de ligação
É importante ter consciência que em muitos problemas com interesse prático, o valor das reaçõesou forças de ligação pode estar limitado pela sua própria natureza.
Por exemplo, apoios por contacto simples devem corresponder a forças de reação normalcom um único sentido possível, aquele que impede a interpenetração dos dois corpos. Comoé evidente, se os corpos se tenderem a afastar deixa de existir contacto e portanto desaparecetambém a força de ligação entre eles.
Como se disse atrás, também as forças transmitidas por cabos têm um único sentido possível.Outra situação a ter em atenção é o caso das forças de reação (ou ligação) mobilizadas
por atrito. Como se estuda na secção 4, o valor máximo da força de atrito depende da reaçãonormal.
A existência de valores limite para as reações tem como consequência que um corpo rígido,ligado ao exterior através de apoios, pode estar em equilíbrio sob a acção de uma determinadaforça, mas não ser possível garantir o equilíbrio se a força mudar de sentido ou aumentar deintensidade. Dito de outro modo, embora as equações de equilíbrio correspondentes a uma dadaconfiguração de equilíbrio se traduzam normalmente por um sistema de equações lineares, apartir do momento em que se consideram limites ao valor das reações o problema passa a tercarácter não linear.
Uma metodologia geral para enfrentar esta dificuldade é discutida na secção 4.6, mas, parajá, vale a pena discutir o caso do contacto entre dois corpos através de uma superfície de dimen-sões finitas (isto é, o apoio não é pontual).
3.11 A linha de ação da reação normal e a verificação ao derrubamento
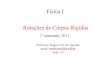
Considere-se o seguinte problema plano: um bloco retangular, de peso P e dimensões b × h,está apoiado sobre uma superfície rugosa e é solicitado por uma força horizontal de valor F ameia altura do bloco, tal como representado na figura 13. Neste exemplo, admite-se que o atritoentre o bloco e a superfície é suficientemente forte para que o bloco não deslize. Pretende-sedesenhar o diagrama de corpo livre, identificando corretamente quais as reações a considerarno contacto chão-bloco.
Sendo a superfície rugosa, é possível mobilizar uma força de atrito horizontal, pelo quedevem ser consideradas duas componentes da força de reação, uma vertical V e outra horizontalH, as quais asseguram que o bloco não sofre translação em qualquer dessas direções. E quantoao grau de liberdade de rotação? Como o bloco está impedido também de rodar, deve serconsiderado o correspondente momento de reação M . O primeiro diagrama de corpo livrerepresentado compreende assim o peso P , a força aplicada F e as três reações V , H e M .
7Respostas: NBI = NFJ = 0, NDI = NEH = P2
, NCJ = − P√2
(a única barra comprimida).
15

F P
V
H
M
h2
h2
P
b2
b2
F P
V
H
eb2
P
R
F
F
Figura 13: Bloco sobre uma superfície horizontal. Diagramas de corpo livre, mostrandovárias formas equivalentes de representar a reação da superfície sobre o bloco.
Note-se, porém, que no traçado do diagrama de corpo livre fomos forçados a escolher umalinha de ação para a reação normal (vertical), decisão para a qual não tínhamos, na verdade,qualquer informação em que nos pudéssemos basear. Colocar a reação normal a meio da su-perfície de contacto pode parecer natural, mas há que reconhecer que decorre da admissãoimplícita de uma distribuição uniforme das tensões normais de contacto, hipótese de veracidadeclaramente duvidosa.8
Em boa verdade, ao termos incluindo um momento nas reações, a linha de ação da reaçãonormal tornou-se um pouco arbitrária. Se mudarmos o ponto de aplicação da reação V , asequações de equilíbrio continuam a ter solução sendo a única diferença o valor obtido para M .Qualquer das soluções está correta, no sentido em que os elementos de redução do conjunto dasreações serão exatamente os mesmos.
Esta última observação leva-nos a pensar que é possível escolher um ponto de aplicaçãopara a reação normal para o qual o momento de reação é nulo, o que nos conduz ao segundodiagrama de corpo livre apresentado na figura 13. Como é evidente, o valor das reações dependedas forças aplicadas ao bloco, pelo que não é possível de antemão — antes de resolver asequações de equilíbrio — saber qual é a linha de ação da reação normal. Consequentemente,o valor da distância e deve ser também considerado uma incógnita. Existe obviamente umarelação entre o momento de reação do primeiro diagrama de corpo livre e a excentricidade e,dada por
M = V e
Reconhecendo o carácter deslizante das forças (para efeitos de equilíbrio), podemos aindafazer deslizar a força F até intersectar a linha de ação do peso P e desenhar a terceira versãodo diagrama de corpo livre, também apresentada na figura 13, a qual torna evidente que aresultante das reações é uma força inclinada R cuja linha de ação passa na intersecção de Fcom P .
Qualquer que seja o diagrama de corpo que sirva de base à sua escrita, as três equaçõesde equilíbrio permitem calcular os valores das reações em função de P , F , b e h, sendo trivialconcluir que
V = P H = F M =Fh
2ou e =
F
P
h
2
Analisemos agora quais os limites a impor ao valor das reações, atendendo à realidade doproblema físico. Por um lado, como já referido atrás, só faz sentido considerar uma reação
8Em contrapartida, as tensões tangenciais (horizontais) partilham todas a mesma linha de ação, pelo que a linhade ação da sua resultante passa obviamente na base do bloco. Este raciocínio só se aplica, porém, a problemasplanos.
16

normal positiva (de baixo para cima). Mas além disso, a linha de ação da reação normal temque passar dentro da superfície de contacto.9 Então devem-se verificar as seguintes inequações:
V ≥ 0 − b2≤ e ≤ b
2ou −bV
2≤M ≤ bV
2
Expressando estas inequações em termos das forças aplicadas ao corpo concluiremos que sóé possível que o corpo esteja em equilíbrio, se se verificarem as seguintes relações:
P ≥ 0 −Pbh≤ F ≤ Pb
h
A primeira desigualdade estará sempre satisfeita, enquanto que a segunda relação permite es-tabelecer qual o valor máximo da força F (em ambos os sentidos) que pode ser aplicada semprovocar o derrubamento do bloco.10
A abordagem explicada atrás concentra-se na natureza do contacto entre corpos e nas con-sequências para as forças de contacto e respetivas linhas de ação. Resta acrescentar que, emmuitas situações de interesse prático, tal como na análise da estabilidade de muros de suporte, averificação da segurança ao derrubamento é feita de uma forma ligeiramente diferente, porven-tura mais simples, tirando partido da geometria particular recorrente nesse tipo de problemas. Aaplicação dessa abordagem ao presente exemplo consiste em garantir que o quociente, entre osmomentos estabilizador e de derrube das forças aplicadas em relação ao ponto que constituirá acharneira de derrubamento, seja maior que um (ou qualquer valor apropriadamente escolhidopara fator de segurança):
Mestab
Mderr=
Pb2Fh2
=Pb
Fh> 1
Facilmente se constata que, neste problema, as duas metodologias conduzem à mesma condição(para o sentido positivo da força F ). Mas observe-se que o cálculo da razão entre momentosestabilizadores e derrubantes se limita a problemas envolvendo um único corpo rígido assentenuma base.
3.12 Determinação de posições de equilíbrio
Para além de servirem para determinar de forças de ligação, as equações de equilíbrio podemser usadas também para determinar posições de equilíbrio. Por exemplo, dado um corpo rígido,cujos vínculos ao exterior não impeçam totalmente os movimentos de corpo rígido, pode querer--se saber qual a posição em que ele se encontra em equilíbrio para um determinado conjunto deforças aplicadas.
A diferença fundamental, relativamente aos problemas já estudados, é que, sendo a posiçãode equilíbrio desconhecida, se torna necessário escrever as equações de equilíbrio numa posiçãogenérica. Este facto não só complica o desenho do diagrama de corpo livre e a escrita dasequações de equilíbrio como leva a que seja em geral necessário resolver uma ou mais equaçõesnão lineares, frequentemente envolvendo funções trigonométricas. Com efeito, tanto a direçãode algumas forças (por exemplo, a reação normal a uma superfície de deslizamento, ou a reaçãonum apoio pendular) como os braços usados para calcular momentos (o ponto de aplicação dasforças acompanha o movimento do corpo rígido) podem depender da posição de equilíbrio.
Para uma ilustração breve deste tipo de problemas, considere-se novamente o bloco da figura13, continuando a admitir-se que o deslizamento está impedido. Considere-se como dimensões
9É um resultado fácil de demonstrar que a resultante de forças paralelas com o mesmo sentido passa forçosamenteentre elas. Ora, como a reação normal não é mais do que a resultante das tensões normais (forças normais infinite-simais por unidade de área) todas de baixo para cima, a sua resultante — a reação normal — passa na envolventeconvexa da superfície de contacto.
10Recorde-se que nesta análise se excluiu à partida a possibilidade de deslizamento.
17

do bloco b = 1, 0 m e h = 1, 6 m e que o peso do bloco é de P = 10 kN. Admita-se que a forçaF aplicada permitiu inclinar o bloco sobre uma das suas arestas.11 Pretende-se saber qual é asubsequente posição de equilíbrio que corresponde a F = 3 kN.
P
V
H
h2
b2
F
b2
θ
Figura 14: Bloco inclinado sobre uma aresta por ação de uma força horizontal. Diagramade corpo livre.
Para resolver este problem, começa-se por desenhar o diagrama de corpo livre numa posiçãogenérica — ver figura 14. Note-se que, para esta posição, as reações têm que passar forçosa-mente pelo ponto de contacto.
As incógnitas do problema incluem agora o ângulo de rotação θ, para além das forças He V . Por aplicação das equações de equilíbrio de forças horizontais e verticais estas últimasão trivialmente iguais às forças aplicadas F e P . Resta então o ângulo θ o qual pode serdeterminado escrevendo a equação de momentos no ponto de contacto. Tem-se então
F
(b sen θ +
h
2cos θ
)+ P
(− b
2cos θ +
h
2sen θ
)= 0 ⇒ tg θ =
Pb− Fh2Fb+ Ph
Observe-se a dificuldade acrescida na determinação dos braços das forças, os quais dependemde θ. Por outro lado, embora a equação de equilíbrio seja uma função não linear do ângulo, érelativamente simples neste caso obter uma solução analítica.
Para os dados deste problema, a solução é
θ = arctg
(10× 1, 0− 3× 1, 6
2× 3× 1, 0 + 10× 1, 6
)= 13, 298◦
11De acordo com a análise realizada na secção 3.11, isso significa que a força F foi — inicialmente —F ≥ 1,0
1,610 = 6, 25 kN.
18

4 Atrito
4.1 Introdução
Atrito é a resistência ao movimento relativo entre superfícies sólidas, camadas de um fluido, oupartículas materiais. Sendo contrário ao movimento relativo e podendo envolver dissipação deenergia, está, paradoxalmente, na origem da transmissão de muitos movimentos úteis — bastapensar no contacto entre o pneu e a estrada de um automóvel a acelerar.
Existem vários tipos de atrito. Neste texto apenas é considerado o atrito seco, gerado entreduas superfícies sólidas.12 Não é por acaso que se introduz agora o tema do atrito, já que a suaconsideração é muito relevante para estudar o equilíbrio dos corpos rígidos, fora das situaçõesexcessivamente idealizadas admitidas na secção 3.
Entre dois corpos em contacto geram-se em geral forças de atrito com direcção tangencialà superfície de contacto. Estas forças podem impedir totalmente o deslizamento relativo, ou,no caso de este se dar, levam à dissipação de energia mecânica convertendo-a em calor. Esteúltimo efeito pode ser facilmente comprovado notando que o ato de esfregar as mãos leva aoseu aquecimento.
As forças de atrito resultam de forças eletromagnéticas entre as moléculas constituindo asduas superfícies em contacto. De notar que a área real de contacto é geralmente apenas umapequena porção da área aparente de contacto, dependendo muito da irregularidade das superfí-cies ao nível microscópico — ver ilustração na figura 15. Dada a complexidade do fenómeno, aquantificação da força de atrito não é geralmente obtida a partir das leis fundamentais da física,sendo antes feita através de métodos empíricos, baseadas na observação experimental.
Figura 15: Ampliação do contacto entre duas superfícies. A irregularidade das superfíciesleva a que a área real de contacto seja muito inferior à área aparente de con-tacto.
As leis clássicas do atrito seco remontam aos escritos de Leonardo da Vinci, que todaviapermaneceram desconhecidas durante séculos, até serem redescobertas por Amontons (1699) eposteriormente desenvolvidas por Coulomb (1785). Podem ser condensadas nestas três leis:
• A força (máxima) de atrito é diretamente proporcional à força normal à superfície decontacto.
• A força (máxima) de atrito é independente da área de contacto.
• A força de atrito é independente da velocidade de deslizamento.
O significado e as implicações destas leis são analisadas nas secções que se seguem.
4.2 Leis do atrito seco. Coeficientes de atrito
Considere-se um bloco de peso P , assente numa superfície horizontal, tal como se ilustra nafigura 16. Analisem-se agora os efeitos de se aplicar uma força Q horizontal. Neste exemplo,admite-se que o bloco é suficientemente largo para que não haja a possibilidade de derrube,
12O atrito entre camadas de fluidos (viscosidade), ou entre fluidos e sólidos (por exemplo, a resistência aerodinâ-mica) ou, ainda, entre sólidos na presença de um fluido lubrificante é estudado na disciplina de mecânica de fluidos.O atrito interno que se gera entre as partículas materiais de um sólido que se deforma é relevante na mecânica dossólidos.
19

mas, em contrapartida, admite-se que ele possa deslizar — observe-se que, no que diz respeitoa esta hipótese, este exemplo é complementar ao apresentado na secção 3.11.
QP
N
F
P Q
φ
Figura 16: Bloco sobre uma superfície horizontal. Diagrama de corpo livre.
O diagrama de corpo livre, apresentado à direita na figura 16, envolve, para além das forçasP e Q, também a reação normal N e a força de atrito F , tangencial à superfície de contacto.Não se conhecendo a relação entre as dimensões do bloco, não será possível escrever a equaçãode momentos, pelo que, neste caso, também não é importante identificar a posição exata daslinhas de ação das forças.
Enquanto a força Q for pequena, o atrito é por si só suficiente para impedir o movimento.As duas equações de equilíbrio relevantes permitem concluir trivialmente que N = P e F = Q.À medida que o valor de Q aumenta, a intensidade da força de atrito F vai também crescendo,igualando sempre o valor da solicitação horizontal aplicada ao bloco, assim garantindo o equi-líbrio de forças.
Mas, aumentando a força Q acima de um certo valor, o atrito deixa de ser suficiente paraimpedir o movimento e o bloco começa a deslizar. De acordo com as leis empíricas do atritoreferidas atrás, o valor máximo da força de atrito é proporcional à força normal, ou seja
|F | ≤ Fe = µeN
onde µe é o coeficiente de atrito estático, grandeza adimensional (estabelece a relação entreduas forças) e que depende da natureza das superfícies em contacto. Na tabela 1 apresentam-se alguns valores típicos deste coeficiente. O valor dos coeficientes de atrito é muito variável,pelo que esta lista é apenas exemplificativa e muito, muito, incompleta. Para uma aplicaçãoespecífica, o ideal é a determinação do coeficiente com base em testes experimentais, tanto maisque o coeficiente de atrito depende de factores tais como o grau de polimento e humidade dassuperfícies em contacto.
Tabela 1: Coeficientes de atrito estático
Superfícies µe
Metal sobre Gelo 0,02–0,05Metal sobre Metal 0,15–0,8
Metal sobre Madeira 0,2–0,6Madeira sobre Madeira 0,25–0,5Borracha sobre Betão 0,6–1,0
Chama-se a atenção para o facto de a máxima força de atrito não depender da área aparentede contacto (a segunda lei), mas apenas do tipo de superfície e da força normal de compressãoexercida no contacto. Uma explicação física reside no facto de a compressão entre superfíciesirregulares ao nível macroscópico aumentar a área real das zonas em contacto.
Quando o atrito é vencido e o deslizamento se inicia, a força de atrito mantem-se aproxima-damente constante (a terceira lei), embora geralmente inferior à força máxima Fe. Uma possívelexplicação para este decréscimo é que, havendo movimento relativo, existe uma menor interpe-netração entre as irregularidades das superfícies em contacto. Nesta situação, a força designa-se
20

por força de atrito cinético, sendo dada por
F = Fc = µcN
onde µc é o coeficiente de atrito cinético, o qual é uma fração do correspondente valor de µe (75%é um valor típico). O sentido da força de atrito é contrário ao do deslizamento relativo.
O gráfico que se mostra na figura 17, sintetiza a discussão apresentada atrás, mostrando avariação da força F com o aumento da força Q, admitindo, bem entendido, que a força normalse mantém constante. Nesse gráfico é possível identificar três situações diferentes: (i) equilíbrio,(ii) movimento iminente e (iii) movimento.
Q
F
µeN
µcN
equil
íbrio
movimento iminente
movimento
Figura 17: Bloco sobre uma superfície horizontal. Relação entre a força de atrito e a forçatangencial aplicada.
É importante chamar a atenção que nem todas as equações com que lidamos se mantêmválidas nestas três situações. De facto, a equação de equilíbrio estático F = Q não é válidaquando há movimento, devendo ser substituída pela equação do movimento Q − F = ma (versecção 4.4). Por outro lado, a equação de atrito F = µeN não se aplica à fase inicial, pois, nãohavendo movimento, sabemos apenas que se verifica a inequação F ≤ µeN .
O movimento iminente corresponde a um ponto muito especial, no sentido em que nesseinstante, tanto é válida a equação de equilíbrio F = Q como a equação de atrito F = µeN .Torna-se, por isso, um cenário muito útil na resolução de problemas.
4.3 Ângulo de atrito e plano inclinado
É interessante identificar o ângulo que a reação faz com a direção normal à superfície. Noexemplo anterior, é imediato reconhecer que esse ângulo é
φ = arctgF
N≤ arctg
µeN
N= arctgµe = φe ⇒ µe = tg φe
O ângulo φe recebe o nome do ângulo de atrito estático. Ou seja, enquanto há equilíbrio, oângulo φ é inferior a φe.
Também para o atrito cinético é possível definir um ângulo de atrito cinético φc, cuja relaçãocom o coeficiente de atrito cinético µc é totalmente análoga: µc = tg φc.
Admita-se agora um bloco de peso P sobre um plano inclinado, cuja inclinação relativa àhorizontal é dada pelo ângulo α, tal como representado na figura 18. Como é evidente, se obloco estiver em equilíbrio a reação R do plano sobre o bloco deverá fazer um ângulo α com adireção normal à superfície inclinada.
Como o ângulo máximo da reação com a normal é dado pelo ângulo de atrito, conclui-seque um bloco sobre um plano inclinado mantém-se em equilíbrio desde que se verifique
α ≤ φe
21

P
α
φe
φe
α
R
α
Figura 18: Bloco em equilíbrio sobre uma superfície horizontal. Diagrama de corpo livreonde se representa o cone de atrito dentro do qual deve estar a reação da su-perfície sobre o bloco.
Esta condição permite interpretar de um modo muito visual o significado do ângulo de atrito: areação do plano sobre o bloco tem que estar situada dentro de um cone de atrito de eixo normalà superfície cujas geratrizes fazem um ângulo φe com o eixo.13
No caso de materiais granulares não coesivos, isto é materiais compostos por pequenas par-tículas sólidas, o ângulo de atrito manifesta-se de uma forma particularmente evidente. Porexemplo, despejando uma certa quantidade de areia sobre um determinado local, verifica-seque esta tende a formar um monte de forma cónica, sendo a inclinação das geratrizes aproxi-madamente igual ao ângulo de atrito. De facto, cada grão de areia que cai sobre a superfícietende a resvalar monte abaixo, sempre que a inclinação da superfície do monte seja superior aoângulo de atrito.
4.4 Atrito cinético e as equações do movimento
A atenção deste texto está dirigida para os problemas de equilíbrio, mas vale a pena fazer umapequena incursão em problemas dinâmicos e ao papel que o atrito cinético desempenha nasequações de equilíbrio.
P
φc
φc
FaN
α
αx
y
α
ax
R
Figura 19: Bloco deslizando sobre uma superfície horizontal. Diagrama de corpo livre. Areação da superfície está situada sobre o cone de atrito e, não existindo equilí-brio de forças segundo x, o bloco sofre aceleração nessa direção.
Considere-se um bloco de massa m sobre um plano inclinado, admitindo-se agora que a in-clinação do plano α é superior ao ângulo de atrito estático φe. Nestas condições o equilíbrio não
13O termo «cone» faz referência ao comportamento tridimensional e às duas componentes da reação paralelas àsuperfície de deslizamento.
22

é possível e o bloco desliza plano abaixo animado por uma aceleração que se pretende determi-nar. Recorrendo ao diagrama de corpo livre representado na figura 19, aplica-se a segunda leide Newton decompondo o movimento em duas direções ortogonais — por conveniência umadelas está alinhada com o plano inclinado,{∑
Fx = max∑Fy = may
⇒
{P senα− Fa = max
N − P cosα = may
Com esta escolha de eixos e para o movimento de deslizamento do bloco sobre o plano14 tem-senaturalmente ay = 0.
No que diz respeito às forças, para além do peso do bloco, P = mg, há que contabilizara reação normal e a correspondente força de atrito. Havendo deslizamento, estas duas forçasrelacionam-se através da lei de atrito cinético
Fa = µcN
A substituição destas relações nas equações de movimento conduz então a{mg senα− µcN = max
N −mg cosα = 0⇒
{ax = (senα− µc cosα) g
N = mg cosα
Determinou-se assim a aceleração adquirida pelo bloco, a qual é uma fração da aceleraçãoda gravidade e que se manterá inalterada, pelo que o movimento será uniformemente acelerado.
4.5 Atrito em cabos e correias
Para além do deslizamento de um corpo sobre uma superfície, existe uma outra situação queinteressa contemplar. Trata-se do atrito entre um cabo ou correia e uma superfície curva queimpõe um desvio à direção do cabo ou da correia.
Frequentemente o desvio da direção de um cabo é materializado através de uma roldanaque roda em torno do seu eixo com um atrito desprezável. Nessa situação, como consequênciado equilíbrio de momentos no centro da roldana, a força de tração instalada é a mesma nos doislados.
Mas se a superfície curva (circular ou não) for fixa, desenvolvem-se forças de atrito quese opõem ao movimento. Trata-se ainda de atrito seco, regido pelas mesmas leis que foramdiscutidas anteriormente, mas há que ter em conta que a direção normal ao escorregamentovaria de ponto para ponto.
Considere-se então um cabo que passa sobre uma superfície curva fixa, tal como represen-tado na figura 20. Pretende-se determinar qual é a relação entre a força de tração nos dois troçosdo cabo quando ele está na iminência de deslizar para a direita. Na figura 20 representa-se tam-bém o diagrama de corpo livre de um troço infinitesimal do cabo. Para facilitar a exposição,no que se segue admite-se que esse troço é «horizontal», mas, na verdade, pode corresponder aqualquer troço em contacto com a superfície, bastando trocar a direção horizontal pela direçãotangente à superfície.
A força de tração do cabo à direita será ligeiramente superior à da esquerda, pelo que éreferida como T + ∆T . Para além das duas forças de tração, há que contar com a reaçãoda superfície curva, a qual inclui a força de atrito opondo-se ao movimento iminente. Dadaa natureza infinitesimal do troço, podemos, como primeira aproximação, considerar a reação
14Note-se que neste problema se admite que o derrube do bloco não está em causa. A análise dinâmica do derrubeé mais complicada pois necessita das equações de movimento relativas à rotação de um corpo rígido, matéria que sóserá estudada noutra disciplina.
23

θ
∆θ
T1 T2 ∆θ
∆θ2
∆θ2
T T + ∆T∆N
∆F
θ
Figura 20: Atrito de um cabo sobre uma superfície curva. A força T2 «puxa» pela força T1 eo movimento está iminente para a direita. Diagrama de corpo livre de um troçoinfinitesimal.
normal como vertical e a força de atrito horizontal. Escrevendo as duas equações de equilíbrio,obtêm-se as forças de contacto com a superfície{∑
Fx = 0∑Fy = 0
⇒
{(T + ∆T ) cos ∆θ
2 − T cos ∆θ2 −∆F = 0
∆N − T sen ∆θ2 − (T + ∆T ) sen ∆θ
2 = 0⇒
{∆F = ∆T cos ∆θ
2
∆N = (2T + ∆T ) sen ∆θ2
No movimento iminente, estas duas forças relacionam-se através da lei de atrito, pelo que
∆F = µe∆N ⇒ ∆T cos∆θ
2= µe(2T + ∆T ) sen
∆θ
2
Esta equação pode ser dividida por ∆θ e rearranjada ligeiramente de forma a que se escrevacomo
∆T
∆θcos
∆θ
2= µe
(T +
∆T
2
)sen ∆θ
2∆θ2
Faz-se agora tender ∆θ para zero, o que tem como consequência: (i) ∆T∆θ tende para a
derivada dTdθ , (ii) a função cosseno tende para um, (iii) (T + ∆T
2 ) tende para T e, finalmente,(iv), a fração envolvendo a função seno tende também um.15 Conclui-se assim que
dTdθ
= µeT
Esta equação diferencial pode ser integrada
dTT
= µedθ ⇒∫ T2
T1
dTT
=
∫ θ2
θ1
µedθ ⇒ lnT2 − lnT1 = µe(θ2 − θ1) ⇒ lnT2
T1= µeθ
obtendo-se finalmente a equação que relaciona as duas forças de tração,
T2 = T1eµeθ
Nesta equação θ representa o ângulo total de desvio sofrido pelo cabo ao passar pelo obs-táculo e deve sempre ser expresso em radianos. Deve-se ainda ter o cuidado de identificar aforça T2 como aquela que «puxa» pela outra, já que a força de atrito funciona contra ela (emconsequência do movimento iminente admitido). Este ângulo pode ser maior que 2π — é o queacontece, por exemplo, quando um cabo de um navio dá várias voltas a um poste de amarração,
15Basta recordar que limx→0
sen xx
= 1.
24

tirando desse modo proveito da relação exponencial para manter o navio preso exercendo umaforça relativamente pequena no cabo do lado de terra.
Não havendo movimento iminente, não é possível escrever uma equação estabelecendo arelação entre forças, mas apenas as inequações
T1e−µeθ ≤ T2 ≤ T1eµeθ
contemplando assim ambos os casos T2 < T1 e T2 > T1. Estas inequações relativas a atrito emcorreias são as equivalentes às inequações do atrito entre superfícies |F | ≤ µeN , ou, o que é omesmo, −µeN ≤ F ≤ µeN .
Note-se que é o ângulo de desvio que é determinante, já que a forma particular da super-fície curva não é realmente importante, podendo ser cilíndrica, outra curva suave ou mesmouma aresta irregular. Em particular, se um cabo é desviado por uma série de obstáculos im-porta apenas o ângulo total acumulado — mas somados sempre em valor absoluto. De facto,para um cabo que passe por três obstáculos como se mostra na figura 21 é imediato mostrar aequivalência
T2 = T1eµeθ1
T3 = T2eµeθ2
T4 = T3eµeθ3⇒ T4 = T1eµeθ1eµeθ2eµeθ3 = T1eµe(θ1+θ2+θ3)
Por último, no caso de o cabo estar efetivamente a escorregar, a relação entre as forças noscabos é dada por uma expressão análoga, bastando substituir o coeficiente de atrito estático pelocinético.
T1
T4 = T1eµe(θ1+θ2+θ3)
θ1
θ2
θ3
T1
T4
θ1
θ2
θ3T2 T2
T3 T3
Figura 21: Cabo contornando três obstáculos. No movimento iminente associado aT4 > T1, a relação entre as forças pode ser calculada com base no ângulo to-tal de desvio.
4.6 Metodologia para resolução de problemas
Independentemente do número de corpos envolvidos e de quais os fenómenos de perda deequilíbrio envolvidos — deslizamento entre superfícies, derrube de corpos, atrito em cabos —dois principais tipos de problemas podem ser colocados envolvendo o atrito entre corpos.
problemas de verificação de equilíbrio
Num primeiro tipo de problema, conhecem-se todas as forças aplicadas e os coeficientes de atritonas superfícies de contacto em jogo e pretende-se saber se o equilíbrio é possível. Neste caso,utilizam-se as equações de equilíbrio dos vários corpos para calcular todas as forças de contactoentre corpos. No final, fazem-se as verificações ao deslizamento e/ou ao derrubamento.
É fundamental ter a consciência de que, numa situação de equilíbrio, as forças de atrito queexistem não são, em geral, iguais à máxima força de atrito. Por esta razão, equações de atrito
25

do tipo F = µeN não devem ser usadas para a determinação das forças de contacto, devendoapenas utilizar-se as inequações F ≤ µeN na verificação ao deslizamento.
Esta abordagem — determinação das forças com base apenas no equilíbrio e posterior veri-ficação das inequações de atrito — funciona em problemas simples, como o do bloco sobre umplano inclinado, mas nem sempre o sistema de equações correspondente ao equilíbrio dos várioscorpos é determinado. De facto, o número de forças de contacto pode ser superior ao númerode equações o que resulta num sistema indeterminado. É então preferível reformular este tipode problemas num problema do segundo tipo, da forma que se explica no fim desta secção.
problemas envolvendo movimento iminente
O segundo tipo de problemas é construído à volta do movimente iminente. Frequentemente,envolve a determinação de qual é o valor máximo de uma força aplicada, de modo a que osistema ainda esteja em equilíbrio, mas pode, em alternativa, incidir sobre qual o menor coefi-ciente de atrito que garante o equilíbrio ou sobre qual o maior ângulo com que uma dada forçapode atuar. Deste modo, as incógnitas do problema incluem, para além das forças de contacto,também a força aplicada de valor desconhecido (ou o coeficiente de atrito desconhecido, ou oângulo de atrito desconhecido).
Neste tipo de problemas, especialmente na presença de vários corpos, pode ser necessáriocolocar uma hipótese sobre o movimento iminente, especificando entre que superfícies se daráum escorregamento relativo e quais os corpos que irão sofrer um derrubamento. Embora nal-guns problemas a forma como se dá o movimento iminente seja óbvia, noutros casos é inevitávelrecorrer a um processo de tentativa e erro.
Em contraste com o primeiro tipo de problemas, a determinação das incógnitas é agora feitacom base nas equações de equilíbrio dos vários corpos, complementadas com as equações deatrito relativas aos escorregamentos admitidos e com a localização das reações nas charneirasdos derrubamentos admitidos. Note-se que o sistema de equações resultante é geralmente nestecaso um sistema determinado, já que a existência de forças de contacto redundantes é compen-sada com equações adicionais correspondentes aos movimentos relativos admitidos.
Mas, à semelhança dos problemas do primeiro tipo, é também necessário fazer as verificaçõesrelativas às interfaces onde se admitiu inicialmente que não haveria deslizamento ou derruba-mento. Se alguma das correspondentes inequações não for satisfeita, é necessário voltar aoprincípio e estudar uma forma diferente de se dar o movimento iminente.
transformação de um problema de verificação de equilíbrio num problema envolvendomovimento iminente
A forma mais simples de lidar com problemas de verificação de equilíbrio indeterminados éadmitir que uma determinada força F , presente no problema, passa a ser variável, sendo o seuaumento16 indiscriminado capaz de desequilibrar o sistema. Em alternativa, pode adicionar-seuma força fictícia com o mesmo fim.
O problema transforma-se assim num problema do segundo tipo que pode ser resolvido deacordo com a metodologia apresentada. Como referido, o sistema de equações correspondenteao movimento iminente será agora determinado.
A força F assim calculada corresponde à força que é necessário aplicar para provocar o mo-vimento iminente. Se este valor for maior que o real positivo, podemos concluir que o equilíbrioé possível.
16Ou decréscimo!
26

4.7 Exemplo de aplicação
Apresenta-se a resolução de um problema que evidencia vários das aspetos focados isoladamenteaté aqui. Embora envolvendo apenas três blocos, o problema já é consideravelmente complexo.
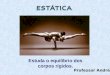
Considere-se o sistema formado por três blocos de pesos conhecidos representado na figura22. O coeficiente de atrito (estático) entre todas as superfícies (inclusive no desvio do cabo emD) é µ = 0, 1. Pretende-se saber se o equilíbrio é possível nesta posição.
3
2 4
7,5
1,5
2,5
C B
A
12
3
6 = Q
2,25
D
[kN, m]
µ = 0, 1
Figura 22: Problema exemplo. Para facilitar a exposição, apresentam-se algumas distânciasque foram calculadas a partir dos dados do problema (por exemplo a posição docentro de gravidade do bloco inclinado). Os pesos dos blocos são todos conhe-cidos, mas, para converter o problema num problema de movimento iminente,admite-se um peso variável Q para o bloco suspenso.
Em primeiro lugar, de acordo com a metodologia proposta, converte-se o problema numproblema de movimento iminente, admitindo-se um peso variável Q para o bloco suspenso.Note-se que um valor de Q demasiado elevado provoca a perda de equilíbrio para a esquerda,mas não é de excluir a possibilidade do bloco superior escorregar para a direita na ausência oupara um valor pequeno de Q. A resolução que se segue ocupa-se apenas do movimento para aesquerda, deixando-se como exercício o outro cenário.
diagramas de corpo livre
Os diagramas de corpo livre estão desenhados na figura 23, sendo conveniente chamar a aten-ção de alguns pormenores. Para facilitar a resolução do problema, nos locais onde é possível oescorregamento, as forças de contacto entre blocos estão decompostas nas componentes normale tangencial. Admite-se para as forças tangenciais o sentido contrário ao movimento relativo es-perado. Além disso, note-se que os contactos em A e B são pontuais, mas o mesmo não acontecena base do bloco inferior, o que leva a que a linha de ação da reação VC seja desconhecida.
Nestes diagramas podemos identificar oito incógnitas: Q, T , NA, FA, NB, FB, VC , HC .Mas ainda desconhecemos a posição da linha de ação de VC , pelo que, de facto, o problemacontém nove incógnitas. Dispomos de três equações de equilíbrio para cada um dos blocos, oque nos leva a concluir que necessitamos de mais três equações relativas a escorregamentos ouderrubamentos. Da figura, observamos que podem ocorrer escorregamentos em A, B e D epode haver derrubamento em torno da charneira C. Que o cabo tem que vencer o atrito emD para haver movimento parece evidente, mas quanto ao resto é necessário admitir hipótesessobre o movimento iminente.
27

12
NA
NB
FB
FA
T
NA
FA
HC
VC
3
T
Q
0,8
0,6 0,8
0,6
1 1
Figura 23: Diagramas de corpo livre dos dois blocos do problema exemplo. Note-se que odesenho relativo ao desvio do cabo emD é útil para escrever a equação do atritoem correias, mas, como não inclui as reações do exterior, não é um verdadeirodiagrama de corpo livre.
hipótese 1: escorregamentos em A e B (e em D)
Comecemos então por admitir que se dão escorregamentos em A e B (e em D). Da análise doequilíbrio do bloco superior (inclinado), tem-se
equilíbrio do bloco superior:
∑Fx = 0∑Fy = 0∑MB = 0
⇒
−T + 0, 8FA + 0, 6NA + FB = 0
−0, 6FA + 0, 8NA +NB − 12 = 0
4, 5T + 2, 25× 12− 5NA = 0
equações estas que complementadas com as duas equações relativas ao escorregamento,
movimento iminente
{FA = 0, 1NA
FB = 0, 1NB
formam um sistema de 5 equações a 5 incógnitas, cuja solução é
T = 9, 838 kN NA = 14, 254 kN FA = 1, 425 kN NB = 1, 452 kN FB = 0, 145 kN
No que diz respeito a este bloco, tudo parece estar bem17, mas é ainda necessário verificar obloco inferior.
As equações de forças deste bloco revelam
equilíbrio do bloco inferior:
{∑Fx = 0∑Fy = 0
⇒
{HC − 0, 6NA − 0, 8FA = 0
VC − 3− 0, 8NA + 0, 6FA = 0
17O que é que podia não estar bem? Por exemplo, se o coeficiente de atrito fosse 0,3 e não 0,1, as cinco equaçõesteriam como solução
T = 17, 335 kN NA = 21, 001 kN FA = 6, 300 kN NB = −1, 021 kN FB = −0, 306 kN
Este resultado não pode ser aceite porque NB não pode ser negativo (a reação do solo tem que ser de baixo paracima). Isto indicaria que em vez do deslizamento em A e B, dever-se-ia antes analisar a rotação em torno de A, aque corresponderia NB = FB = 0. Em contrapartida deixaria de haver escorregamento em A.
28

Entrando com os valores obtidos para NA e FA, obtém-se
HC = 9, 693 kN VC = 13, 548 kN
que se confirma serem ambos positivos, como teriam que ser dada a natureza do contacto porencosto. Falta, ainda, verificar a condição do derrubamento. Uma forma de o fazer é calcular omomento de NA, FA e do peso do bloco em relação ao ponto C,∑
MC() = (0, 6× 3− 0, 8× 2)NA + (0, 8× 3 + 0.6× 2)FA − 3× 1 = 4, 982 kNm > 0
Esta quantidade ser positiva mostra que a linha de ação da reação VC precisa de estar à esquerdado ponto C, o que é impossível.
A hipótese inicialmente admitida tem que estar errada. Voltamos à estaca zero, embora agoratenhamos fortes suspeitas que o movimento iminente deve estar associado ao escorregamentoem B e ao derrube do bloco inferior em torno de C.
hipótese 2: escorregamentos em B (e em D); derrube em C
Quando existe derrube em torno de C, a linha de ação de VC passa por C. Então por equilíbriode momentos em C no bloco inferior tem-se∑
MC = 0 ⇒ (0, 6× 3− 0, 8× 2)NA + (0, 8× 3 + 0.6× 2)FA − 3× 1 = 0
ou, simplesmente,
0, 2NA + 3, 6FA − 3 = 0
Regressamos, ao bloco superior. Continuam a ser válidas as três equações de equilíbrioapresentadas anteriormente, que aqui se repetem:
equilíbrio do bloco superior:
−T + 0, 8FA + 0, 6NA + FB = 0
−0, 6FA + 0, 8NA +NB − 12 = 0
4, 5T + 2, 25× 12− 5NA = 0
Mas as equações associadas ao movimento são agora, apenas o deslizamento em B e aequação deduzida atrás, relativa ao derrube do bloco inferior,
movimento iminente
{FB = 0, 1NB
0, 2NA + 3, 6FA − 3 = 0
Não é de mais realçar que no cenário agora considerado não se pode admitir FA = 0, 1NA!Estas cinco equações têm agora como solução
T = 7, 768 kN NA = 12, 391 kN FA = 0, 145 kN NB = 2, 174 kN FB = 0, 217 kN
Estes valores permitem comprovar que não existe, de facto, escorregamento em A
FA = 0, 145 kN < 0, 1NA = 0, 1× 12, 391 = 1, 239 kN
Concluímos assim que esta segunda hipótese é a verdadeira (em rigor, falta verificar queHC = 7, 551 kN e VC = 12, 826 kN são ambos positivos).
29

obtenção da força Q e verificação do equilíbrio
Falta relacionar T com o peso do bloco suspenso. Recorrendo à equação do atrito em cabos,tendo em conta que o movimento iminente corresponde à descida do bloco suspenso tem-se
Qmax = T e0,1×π2 = 1, 170× 7, 768 = 9, 089 kN (1)
Este seria o peso do bloco suspenso que iniciaria o movimento descendente. Como o peso dobloco suspenso é, na realidade, inferior (6 kN), podemos concluir que o movimento não se dáneste sentido.
Como se disse no início da resolução do problema, há ainda que fazer a verificação nooutro sentido. O procedimento é muito semelhante, residindo a principal diferença no sentidodas forças de atrito nos pontos A e B. Omite-se a resolução detalhada, mas resumem-se osresultados dessa análise: o movimento iminente para a esquerda, dá-se por deslizamento emA e em B (não há derrubamento do bloco inferior) para T = 4, 559 kN, a que correspondeQmin = 3, 897 kN.
Visto que o peso do bloco Q = 6 kN está compreendido entre estes valores Qmin e Qmax,podemos dizer que o equilíbrio dos blocos está verificado.
∗ ∗ ∗
Constatamos que um problema relativamente simples acaba por ter uma resolução algo com-plicada com muitas verificações sucessivas, o que é uma consequência de a forma como se dá omovimento iminente não ser óbvia. Uma abordagem deste tipo, assentando fortemente numaestratégia de tentativa e erro, é útil para ganhar uma boa compreensão dos fenómenos físi-cos em jogo (contacto, escorregamento, derrube) em problemas de pequena dimensão, mas éclaramente inapropriada para problemas mais complexos. É verdade que existem técnicas ma-temáticas (programação linear) que permitem lidar com problemas deste tipo de uma formasistemática, mas esse tema está claramente fora do âmbito deste texto.
Manuel Ritto Corrêa
2 Março 2016
30