Embed Size (px)
Citation preview

Elementos finitos en la industria Sesión I
Sesión I
I.1 Introducción
I.2 El método de rigideces
I.3 Estructura de los programas
I.4 Principios variacionales
-1-Dr. Sergio Gallegos Cázares

Elementos finitos en la industria Sesión I
I.1 INTRODUCCIÓN
• El modelo básico de un cuerpo en mecánica debe representar a cualquier cuerpo posible.
• Consideremos un soporte de maquinaria:
S = Superficie V = Volumen
-2-Dr. Sergio Gallegos Cázares

Elementos finitos en la industria Sesión I
Su = Superficie con movimiento restringido
St = Superficie con tracción aplicada
-3-Dr. Sergio Gallegos Cázares

Elementos finitos en la industria Sesión I
• El modelo mecánico se representa mediante:
-4-
• Problema básico de mecánica:
♦ Dado un cuerpo continuo, con volumen V y superficie S, sobre el cual se especifican las condiciones de frontera de desplazamiento (Su) y de tracción (St), encuentre el movimiento de cada partícula material y determine el estado de fuerza interna.
• El método de los elementos finitos, es un método numérico que resuelve el problema básico de mecánica de una forma aproximada.
• Si el volumen del cuerpo tiene proporciones específicas y la manera de cargar y apoyar al material sigue ciertas reglas, entonces el cuerpo es un elemento estructural y el problema que resolvemos es el de la mecánica estructural.
• Si el volumen es general, o bien, la forma de cargarlo o de soportarlo no cumple con las reglas especificadas arriba, entonces el cuerpo es simplemente un cuerpo continuo, y el problema que se resuelve es el de la mecánica de sólidos.
• En estas cuatro sesiones trataremos el tema de resolver problemas de mecánica de sólidos y de mecánica estructural mediante el método de los elementos finitos.
• Ver transparencias de sólidos y estructuras.
V b
t
u g=
St
Su
Dr. Sergio Gallegos Cázares

Elementos finitos en la industria Sesión I
I.2 EL MÉTODO DE RIGIDECES
• Este método nos permite resolver estructuras que son discretas por naturaleza: armaduras.
• Consideremos el elemento mecánico más simple: la barra.
• De la mecánica de barras básica tenemos:
fl
E, A fl klx
L
-5-
♦ lEAf kLδ δ= =
♦ k es la rigidez axial de la barra, por lo que a esta expresión se le llama ecuación de rigidez.
♦ Esta relación es la ecuación de equilibrio, más la ecuación de compatibilidad y la relación constitutiva del material embebidas.
• Si el objetivo es resolver una armadura, compuesta de muchas de estas barras, requerimos generalizar la expresión de rigidez.
• Expandiendo a 2D
δ
(a) (b)
Dr. Sergio Gallegos Cázares

Elementos finitos en la industria Sesión I
-6-
♦ [ ]
ffff
EAL
uuuu
f k u
1
2
3
4
1
2
3
4
1 0 1 00 0 0 01 0 1 0
0 0 0 0
⎧
⎨⎪⎪
⎩⎪⎪
⎫
⎬⎪⎪
⎭⎪⎪
=
−
−
⎡
⎣
⎢⎢⎢⎢
⎤
⎦
⎥⎥⎥⎥
⎧
⎨⎪⎪
⎩⎪⎪
⎫
⎬⎪⎪
⎭⎪⎪
⇒ =
♦ Noten la existencia de un sistema de referencia local, con respecto al cual se escriben las ecuaciones gobernantes.
• Generalizando el uso de la barra en cualquier dirección en el plano (2D):
♦ Para el nodo 1: [ ] uu
Cos SenSen Cos
uu
u T u1
2
1
21 1
⎧⎨⎩
⎫⎬⎭=
−⎡
⎣⎢
⎤
⎦⎥⎧⎨⎩
⎫⎬⎭
⇒ =α αα α 1
♦ Considerando los dos nodos:
[ ] [ ][ ] [ ]
[ ]
uu
TT
uu
u T u1
2
1
1
1
2
00
⎧⎨⎩
⎫⎬⎭=⎡
⎣⎢
⎤
⎦⎥⎧⎨⎩
⎫⎬⎭
⇒ =
♦ Para la fuerza: [ ] f T fT=
♦ Por tanto, las ecuaciones de rigidez se pueden transformar: [ ] f k u=
u2
u1
y
u4f 4f 2 u3 x1 2
f1 f 3
x
y
X
Y
α
u2u1 u2
2 α
α u1 11
(b) Relación de desplazamientos(a) Barra inclinada en 2D
Dr. Sergio Gallegos Cázares

Elementos finitos en la industria Sesión I
♦ Donde [ ] [ ] [ ][ ]k T k TT=
♦ Noten la existencia de un sistema de referencia global y uno local para la barra.
♦ El formato de las ecuaciones de rigidez es idéntico en cualquier sistema, lo que cambia es la interpretación física de las relaciones. En cualquier sistema, son ecuaciones de equilibrio.
• La construcción de las ecuaciones de equilibrio de un sistema grande, se hace a partir de las ecuaciones de las barras individuales.
• Consideremos la armadura siguiente:
u2
u1
1 u4
Barra 1-2: E, A, L1u32
-7-
♦ Noten que los grados de libertad se numeran en forma única con respecto al sistema de referencia global.
♦ Para cada barra se pueden escribir las ecuaciones de rigidez, que satisfacen el equilibrio de cada barra y las relaciones constitutivas y de compatibilidad en forma independiente.
♦ Barra 1:
ffff
k k k kk k k kk k k kk k k k
uuuu
11
21
31
41
111
121
131
141
211
221
231
241
311
321
331
341
411
421
431
441
11
21
31
41
⎧
⎨⎪⎪
⎩⎪⎪
⎫
⎬⎪⎪
⎭⎪⎪
=
⎡
⎣
⎢⎢⎢⎢
⎤
⎦
⎥⎥⎥⎥
⎧
⎨⎪⎪
⎩⎪⎪
⎫
⎬⎪⎪
⎭⎪⎪
u53
u6 Barra 3-2: E, A, L2Y
P X
Dr. Sergio Gallegos Cázares

Elementos finitos en la industria Sesión I
♦ Barra 2:
ffff
k k k kk k k kk k k kk k k k
uuuu
12
22
32
42
112
122
132
142
212
222
232
242
312
322
332
342
412
422
432
442
12
22
32
42
⎧
⎨⎪⎪
⎩⎪⎪
⎫
⎬⎪⎪
⎭⎪⎪
=
⎡
⎣
⎢⎢⎢⎢
⎤
⎦
⎥⎥⎥⎥
⎧
⎨⎪⎪
⎩⎪⎪
⎫
⎬⎪⎪
⎭⎪⎪
♦ La armadura completa debe cumplir también con la compatibilidad, lo cual se satisface en forma muy sencilla, rescribiendo las ecuaciones con la numeración global, en lugar de la local.
♦ Barra 1:
ffff
k k k kk k k kk k k kk k k k
uuuu
11
21
31
41
111
121
131
141
211
221
231
241
311
321
331
341
411
421
431
441
1
2
3
4
⎧
⎨⎪⎪
⎩⎪⎪
⎫
⎬⎪⎪
⎭⎪⎪
=
⎡
⎣
⎢⎢⎢⎢
⎤
⎦
⎥⎥⎥⎥
⎧
⎨⎪⎪
⎩⎪⎪
⎫
⎬⎪⎪
⎭⎪⎪
♦ Barra 2:
ffff
k k k kk k k kk k k kk k k k
uuuu
12
22
32
42
112
122
132
142
212
222
232
242
312
322
332
342
412
422
432
442
5
6
3
4
⎧
⎨⎪⎪
⎩⎪⎪
⎫
⎬⎪⎪
⎭⎪⎪
=
⎡
⎣
⎢⎢⎢⎢
⎤
⎦
⎥⎥⎥⎥
⎧
⎨⎪⎪
⎩⎪⎪
⎫
⎬⎪⎪
⎭⎪⎪
♦ El equilibrio global se satisface nodo por nodo de la forma usual. Por ejemplo, para el nodo 2 de la armadura, el diagrama de cuerpo libre correspondiente es:
-8-
♦ Ecuaciones de equilibrio nodal: F f f
F f f PX
Y
= − − =
= − − − =
∑∑
0 0
0 031
32
41
42
;
;
♦ Las ecuaciones se escriben en términos de los desplazamientos mediante las ecuaciones de rigidez. Por ejemplo, para la ecuación de equilibrio en Y será:
f 41
f 31
f 42
f 32
f 42
f 41
f 31
f 3
2P
(a) Fuerzas en las barras (b) Fuerzas en el nodo 2
Dr. Sergio Gallegos Cázares

Elementos finitos en la industria Sesión I
( ) (( ) ( )
f f P
k u k u k u k u k u k u k u k u P
k u k u k k u k k u k u k u P
41
42
411
1 421
2 431
3 441
4 412
5 422
6 432
3 442
4
411
1 421
2 431
432
3 441
442
4 412
5 422
6
+ = −
+ + + + + + + =
+ + + + + + + = −
) −
( ) ( )[ ]k k k k k k k k
uuuuuu
P411
421
431
432
441
442
412
422
1
2
3
4
5
6
+ +
⎧
⎨
⎪⎪⎪
⎩
⎪⎪⎪
⎫
⎬
⎪⎪⎪
⎭
⎪⎪⎪
= −
[ ]K K K K K K
uuuuuu
P41 42 43 44 45 46
1
2
3
4
5
6
⎧
⎨
⎪⎪⎪
⎩
⎪⎪⎪
⎫
⎬
⎪⎪⎪
⎭
⎪⎪⎪
= −
• Al terminar con las ecuaciones de equilibrio en cada grado de libertad se tendrá:
⎪⎪⎪⎪
⎭
⎪⎪⎪⎪
⎬
⎫
⎪⎪⎪⎪
⎩
⎪⎪⎪⎪
⎨
⎧
−=
⎪⎪⎪⎪
⎭
⎪⎪⎪⎪
⎬
⎫
⎪⎪⎪⎪
⎩
⎪⎪⎪⎪
⎨
⎧
⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
6
5
2
1
6
5
4
3
2
1
666564636261
565554535251
464544434241
363534333231
262524232221
161514131211
0
RR
P
RR
uuuuuu
KKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKK
• O en forma compacta: [ ] K U F=
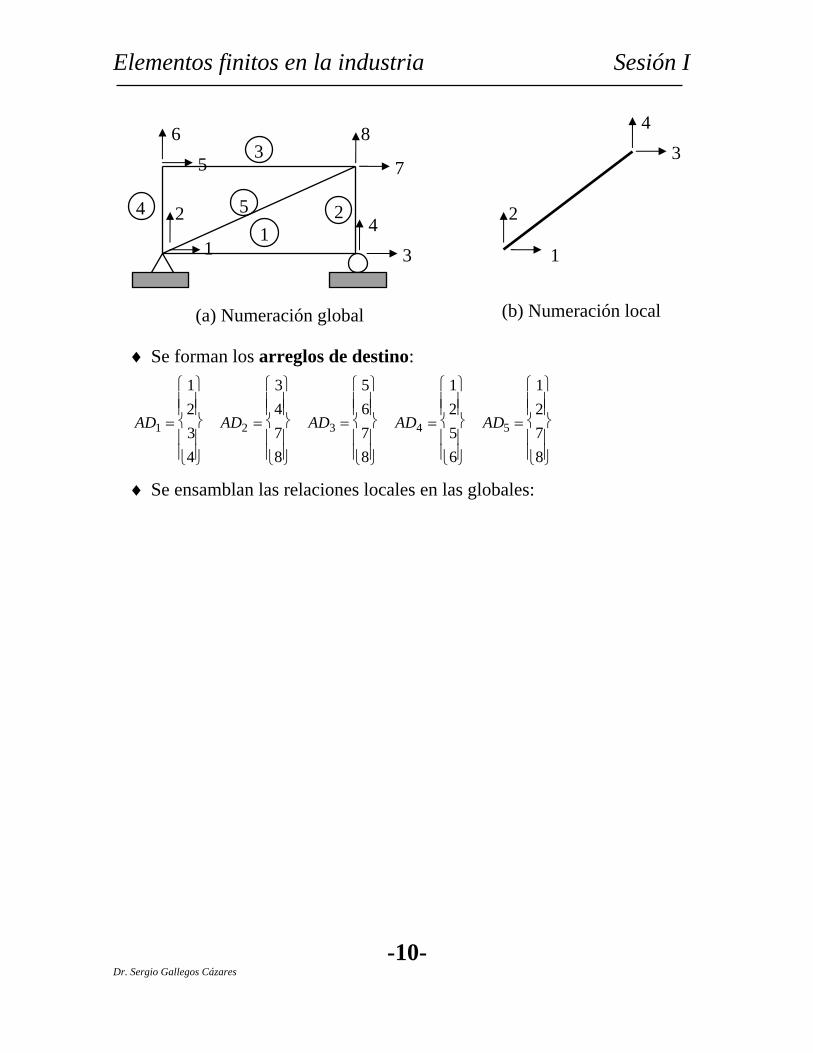
• El proceso de generación de las ecuaciones globales de equilibrio se automatiza mediante el llamado método de ensamble directo. El método se ilustra con un ejemplo.
• Consideremos la siguiente armadura:
-9-Dr. Sergio Gallegos Cázares
Elementos finitos en la industria Sesión I
4
-10-
♦ Se forman los arreglos de destino:
AD AD AD AD AD1 2 3 4 5
1234
3478
5678
1256
1278
=
⎧
⎨⎪⎪
⎩⎪⎪
⎫
⎬⎪⎪
⎭⎪⎪
=
⎧
⎨⎪⎪
⎩⎪⎪
⎫
⎬⎪⎪
⎭⎪⎪
=
⎧
⎨⎪⎪
⎩⎪⎪
⎫
⎬⎪⎪
⎭⎪⎪
=
⎧
⎨⎪⎪
⎩⎪⎪
⎫
⎬⎪⎪
⎭⎪⎪
=
⎧
⎨⎪⎪
⎩⎪⎪
⎫
⎬⎪⎪
⎭⎪⎪
♦ Se ensamblan las relaciones locales en las globales:
2 4
3
1 5 2
1 3 4
6 5 7
8
1
2
3
(b) Numeración local(a) Numeración global
Dr. Sergio Gallegos Cázares

Elementos finitos en la industria Sesión I
[ ]
[ ]
1 2 7 81 2 3 4
1234
1278
1278
5 5k
x x x xx x x xx x x xx x x x
AD
K
x x x xx x x x
x x x xx x x x
=
⎡
⎣
⎢⎢⎢⎢
⎤
⎦
⎥⎥⎥⎥
=
⎧
⎨⎪⎪
⎩⎪⎪
⎫
⎬⎪⎪
⎭⎪⎪
=
⎡
⎣
⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢
⎤
⎦
⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥
GDL globales
GDL locales
-11-
♦ Al terminar de ensamblar las contribuciones de cada elemento se tendrán las relaciones de la estructura completa.
• Condiciones de frontera en Su.
♦ Una forma conceptual de aplicarlas más que práctica es la siguiente.
♦ Se dividen los desplazamientos en desconocidos xU y restringidos rU , y se realiza una partición de las ecuaciones:
[ ] [ ][ ] [ ]
K KK K
UU
FF
xx xr
rx rr
x
r
x
r
⎡
⎣⎢
⎤
⎦⎥⎧⎨⎩
⎫⎬⎭=⎧⎨⎩
⎫⎬⎭
♦ Los desplazamientos desconocidos se obtienen de
[ ] [ ] K U F K Uxx x x xr r= −
♦ Las reacciones se obtienen de
[ ] [ ] F K U K Ur rx x rr= + r
12
7 8
1 2 7 8
Dr. Sergio Gallegos Cázares

Elementos finitos en la industria Sesión I
• Procedimiento para el análisis estático lineal de estructuras considerando los grados de libertad restringidos al nivel de la estructura:
Dr.
Preprocesamiento: 1. Capturar información básica: Coordenadas de nodos, conectividad de
elementos, propiedades de los materiales, propiedades de los elementos,cargas nodales y sobre los elementos y restricciones esenciales en losnodos. Numerar primero grados de libertad libres y al final los restringidos.
Análisis: 2. Iniciar arreglos globales con el número total de grados de libertad: Ktot = 0
, Ftot = 0
3. Ciclar sobre elementos: 1, NUMEL
a. Calcular la matriz de rigidez en el sistema coordenado global: k(e)
b. Calcular el vector de cargas nodales equivalentes en el sistema coordenado global: f(e)
c. Formar el arreglo de destino
d. Mapear k(e) Ktot , f(e) ) Ftot
4. Reducir el sistema de ecuaciones al considerar los grados de libertadrestringidos: Kdd * Dd = Fc – Kdc * Dc
5. Resolver el sistema de ecuaciones
S
Postprocesamiento: 6. Salida de desplazamientos
7. Ciclar sobre elementos: 1, NUMEL
a. Obtener desplazamientos del elemento: u(e) Dtot
b. Calcular deformación: ε
c. Calcular esfuerzos: σ = C * ε
d. Salida de esfuerzos y deformaciones
8. Calcular restricciones: Fd = Kcd * Dd + Kcc * Dc
9. Salida de reacciones
-12-ergio Gallegos Cázares

Elementos finitos en la industria Sesión I
I.3 ESTRUCTURA DE LOS PROGRAMAS DE ELEMENTOS FINITOS
Módulo de Preprocesamiento
-13-
• Ejercicio 1: Truss_2D
I.4 PRINCIPIOS VARIACIONALES
• El método de rigideces se puede generalizar empleando ciertos principios generales, que en mecánica se llaman Principios Variacionales.
• Estos principios son formas integrales de las ecuaciones gobernantes a partir de las cuales se obtienen soluciones aproximadas.
• EL PRINCIPIO DEL TRABAJO VIRTUAL
♦ Consideremos un cuerpo deformable sobre el que actúan fuerzas de cuerpo B dentro del volumen, tracciones T sobre la parte St de la superficie, y cuyos desplazamientos se restringen sobre la parte Su restante.
Módulo de Análisis Estructural
Módulo de Postprocesamiento
GID PAEF
Dr. Sergio Gallegos Cázares

Elementos finitos en la industria Sesión I
T
tS
BV
u g=uS
♦ Sobre este cuerpo, que se encuentra en equilibrio, se aplica un desplazamiento virtual cinemáticamente admisible uδ .
♦ Puede demostrarse que el equilibrio del sistema es equivalente a la expresión:
int0 0extW W Wδ δ δ= ⇒ + =
τ
o bien
T T T
V S V
u B dV u T dS dVδ δ δε+ =∫∫∫ ∫∫ ∫∫∫
♦ La satisfacción de esta ecuación es un requisito NECESARIO para que se produzca el EQUILIBRIO en un punto de un medio continuo. La Ecuación establece simplemente que para que un cuerpo se encuentre en equilibrio es necesario que el trabajo de las fuerzas externas y de los esfuerzos internos sobre campos de desplazamiento y deformaciones virtuales cinemáticamente compatibles sea cero.
• PRINCIPIO DE LA ENERGÍA POTENCIAL MÍNIMA
♦ En cuerpos elásticos, se implica la existencia de una función de energía de deformación específica U0, tal que
0U∂ τ
∂ ε=
♦ Puede demostrarse que al incluir esta relación en el principio del trabajo virtual se transforma en
0 0Wδ δ= ⇒ Π =
-14-Dr. Sergio Gallegos Cázares

Elementos finitos en la industria Sesión I
en donde Π se define como la energía potencial del sistema
0T T
V V S
U
U dV u B dV u T dS
Π = +Ω
= − −∫∫∫ ∫∫∫ ∫∫
en donde U se denomina la energía de deformación interna, y Ω la energía potencial externa.
♦ Puede demostrarse también que en la condición estacionaria la energía potencial es mínima.
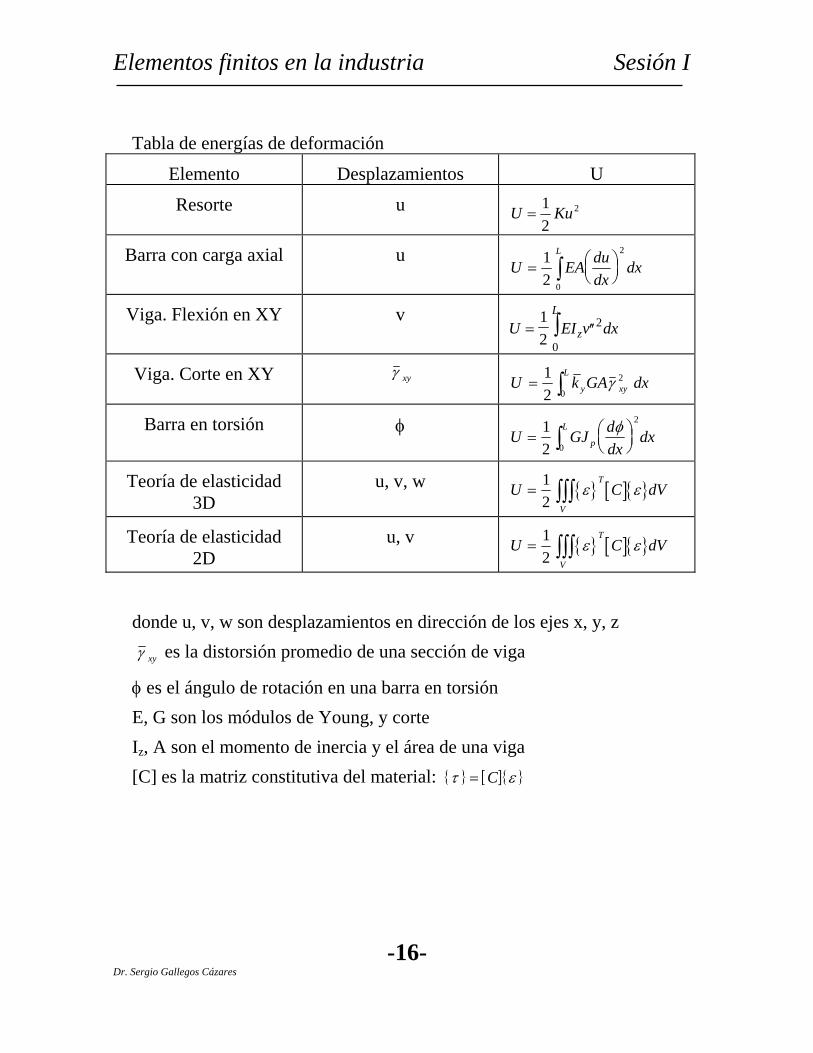
♦ Para aplicar este principio en forma práctica es necesario desarrollar expresiones de la energía de deformación para diversos elementos estructurales. En la Tabla que sigue se presenta un breve resumen.
-15-Dr. Sergio Gallegos Cázares
Elementos finitos en la industria Sesión I
Tabla de energías de deformación
Elemento Desplazamientos U
Resorte u U Ku=12
2
Barra con carga axial u U EA du
dxdx
L
= ⎛⎝⎜
⎞⎠⎟∫
12
2
0
Viga. Flexión en XY v U EI vz
L= ′′∫1
22
0dx
Viga. Corte en XY γ xy U k GAy xy
L= ∫
12
2
0γ dx
Barra en torsión φ U GJ d
dxdxp
L= ⎛
⎝⎜⎞⎠⎟∫
12
2
0
φ
Teoría de elasticidad 3D
u, v, w [ ] U CV
T= ∫∫∫
12
ε ε dV
Teoría de elasticidad 2D
u, v [ ] U CV
T= ∫∫∫
12
ε ε dV
donde u, v, w son desplazamientos en dirección de los ejes x, y, z γ xy es la distorsión promedio de una sección de viga
φ es el ángulo de rotación en una barra en torsión E, G son los módulos de Young, y corte Iz, A son el momento de inercia y el área de una viga [C] es la matriz constitutiva del material: [ ] τ ε= C
-16-Dr. Sergio Gallegos Cázares

Elementos finitos en la industria Sesión I
Valores de las constantes de corte k para vigas
Sección k
Rectangular sólida
56
Circular sólida
910
Tubular delgada
0.5
Vigas I o vigas cajón
AA
alma
-17-Dr. Sergio Gallegos Cázares

Elementos finitos en la industria Sesión I
Constantes de torsión de Saint Venant para diversos tipos de barras.
Tipo de sección J p Circular J rp dA
A= ∫∫ 2
No circular sólida JG
dydzpA
= ∫∫2θ
Φ ,Φ =función de esfuerzos
JA
Ipp
≈0 025 4. para secciones sólidas
Abierta de pared delgada J
btt bp = <
3
3<
b≈
J c bt t b o tp = <13 ,
b tcb tc
/ .. . . . .
/ . .. . . .
∞ 10 5 3 2 50 333 0 312 0 291 0 263 0 249
2 15 12 10 229 0196 0166 0141
1
1
Secciones abiertas formadas por varias secciones
J Jp pi
i= ∑
Secciones cerradas de pared delgada
J dst
p =∫4Ω
donde Ω es el área encerrada por la línea media del tubo.
t
b
-18-Dr. Sergio Gallegos Cázares

Elementos finitos en la industria Sesión I
• EL MÉTODO DE RAYLEIGH-RITZ
♦ El método de Rayleigh-Ritz consiste en proponer funciones de aproximación para las soluciones buscadas, en particular en el campo de Mecánica de Sólidos, aproximaciones a los desplazamientos del cuerpo.
♦ Este proceso se conoce como discretización y transforma un problema continuo en uno discreto.
♦ Número Pi.
♦ Mediante estas aproximaciones los principios variacionales producen un sistema de ecuaciones algebraicas simultáneas a partir del cual se obtienen los valores de los coeficientes nodales o no-nodales.
♦ Una característica importante de las aproximaciones empleadas en los métodos variacionales es que se deben satisfacer las condiciones de restricción de los desplazamientos, o condiciones de frontera esenciales, para que las funciones de aproximación sean admisibles.
♦ La aproximación se expresa en términos de los coeficientes no-nodales en su forma clásica o en términos de desplazamientos nodales, en su forma de elementos finitos. Aquí se representan los valores discretos mediante el vector , donde D
D
DD
Dn
=
⎧
⎨⎪⎪
⎩⎪⎪
⎫
⎬⎪⎪
⎭⎪⎪
1
2
♦ Los campos de desplazamiento se convierten en funciones discretas de esas coordenadas
( )u u x y z D Di i n= , , ; , ,1 …
♦ Para emplear el Principio del Trabajo Virtual:
◊ Se definen los desplazamientos virtuales ( )δ δu u x y z D Di i n= , , ; , ,1 … δ
-19-Dr. Sergio Gallegos Cázares
Elementos finitos en la industria Sesión I
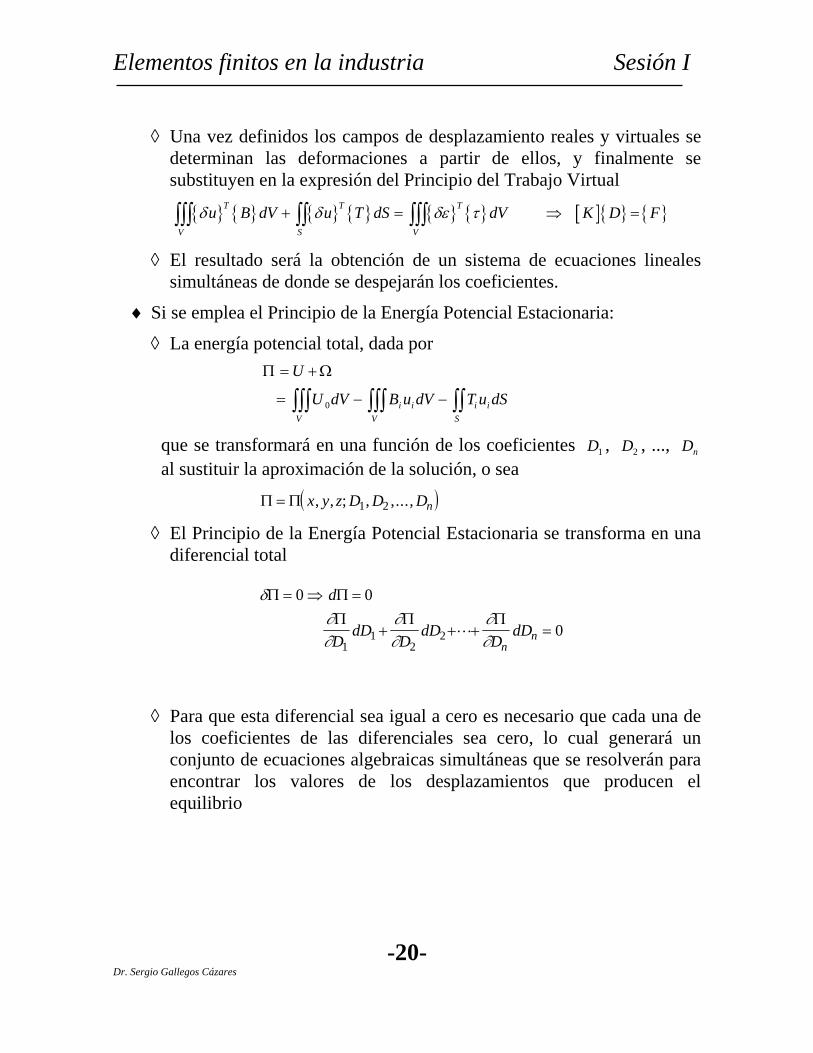
◊ Una vez definidos los campos de desplazamiento reales y virtuales se determinan las deformaciones a partir de ellos, y finalmente se substituyen en la expresión del Principio del Trabajo Virtual
T T T
V S V
u B dV u T dS dVδ δ δε+ =∫∫∫ ∫∫ ∫∫∫ τ [ ] K D F⇒ =
◊ El resultado será la obtención de un sistema de ecuaciones lineales simultáneas de donde se despejarán los coeficientes.
♦ Si se emplea el Principio de la Energía Potencial Estacionaria:
◊ La energía potencial total, dada por
Π Ω= +
= − −∫∫∫ ∫∫∫ ∫∫U
U dV B u dV T u dSV
iV
i iS
0 i
que se transformará en una función de los coeficientes , , ..., al sustituir la aproximación de la solución, o sea
D1 D2 Dn
( )Π Π= x y z D D Dn, , ; , ,...,1 2
◊ El Principio de la Energía Potencial Estacionaria se transforma en una diferencial total
δ
∂∂
∂∂
∂∂
Π ΠΠ Π Π
= ⇒ =
+ + +
0 0
01
12
2
d
DdD
DdD
DdD
nn =
◊ Para que esta diferencial sea igual a cero es necesario que cada una de los coeficientes de las diferenciales sea cero, lo cual generará un conjunto de ecuaciones algebraicas simultáneas que se resolverán para encontrar los valores de los desplazamientos que producen el equilibrio
-20-Dr. Sergio Gallegos Cázares

Elementos finitos en la industria Sesión I
d
D
D
D
D
n
nΠ
Π
Π
Π
Π= ⇒
=
=
=
⎧
⎨
⎪⎪⎪
⎩
⎪⎪⎪
⇒ =⎧⎨⎩
⎫⎬⎭
0
0
0
0
0
1
2
∂∂∂∂
∂∂
∂∂
[ ] K D F⇒ =
• El Método de Rayleigh-Ritz que se acaba de presentar se transforma en el Método de los Elementos Finitos si las soluciones aproximadas que se utilizan cumplen con dos requisitos:
♦ La aproximación es nodal.
♦ La aproximación es válida en subdominios o elementos únicamente, esto es, tiene una base local.
-21-Dr. Sergio Gallegos Cázares