Embed Size (px)
Citation preview

2
PRESENTACION DE LA OPTIC 6 SPORT 2.4 GHz Enhorabuena! Ahora posee un equipo de radio control básico, pero extremadamente versátil y potente. Una emisora programable de 6 canales. La Optic 6 Sport 2,4 GHz es la radio que necesita para controlar la mayor parte de aeroplanos de ala fija, desde entrenadores básicos hasta aviones para 3-D, incluyendo alas volantes o hidroaviones, tanto con motor a explosión como electricos, planeadores puros o con motor, asi como la mayoria de helicópteros. Como aprenderá con la lectura de este manual, la capacidad de esta emisora para controlar y mezclar la señal de sus canales de múltiples maneras, le permitirá crear sorprendentes y sofisticadas funciones de vuelo que hasta ahora solo estaban disponibles en equipos muy complicados y superiores en precio. Esta emisora incluye funciones como: inversion de recorrido, limitacion de recorrido y ajustes de sub-trim para todos los canales, y valores ajustables tanto de Dual-rate como de exponencial, para alerones, profundidad y dirección. La única limitación de esta emisora es que su modelo requiera SEIS CANALES o menos. CARACTERÍSTICAS : MEMORIA: Esta emisora computerizada puede almacenar todos los ajustes necesarios, incluyendo posiciones de trim, mezclas y sus combinaciones para cada modelo, hasta un total de DIEZ modelos en la memoria de su OPTIC 6 SPORT 2,4 GHz. Esta emisora guardará los ajustes para cada uno de los modelos eternamente, aunque desconecte o retire la batería MEZCLAS PRE-PROGRAMADAS: Su nueva emisora computerizada OPTIC 6 SPORT 2,4 GHz, lleva programadas de fábrica las mezclas necesarias de
profundidad y direccion necesarias para controlar aviones con cola en “V”, o mezcla de profundidad y alerones, para controlar alas volantes, eliminando la necesidad de usar mezcladores embarcados. Otra mezcla pre-programada es la de direccion/alerones, que le permite coordinar bien los giros, asi como una mezcla elevador/flaps. SUB-TRIM : Esta emisora compute-rizada le permite fácilmente un ajuste perfecto de la posición de las superficies de mando (mantener el timon de dirección centrado, o el control de dos servos independientes para alerones), sin tener que reajustar fisicamente la longitud de las trans-misiones de mando. MEZCLAS LIBRES : Esta emisora posee, ademas de las mezclas pre-programadas, una mezcla libre en la cual puede Vd programar cualquier mezcla que desee realizar, decidiendo, ademas,cual sera el servo principal y cual el secundario. Ejemplo : mezclar motor con elevador para contrar la tendencia a subir, o motor con dirección, para contrar el par motor. ENSEÑANZA : Para aquellos que estén aprendiendo a volar, esta emisora puede usar un cable de ense-ñanza que, religado con otra emisora, puede ejercer tanto de profesor, como de alumno. Pulsando un botón, el control del aparato que tenia el alumno, pasa a ser controlado por quien ejerce de profesor. Si esta es su primera emisora compute-rizada, seguramente se sentirá un poco asustado ante la cantidad de botones y controles de la OPTIC 6 SPORT 2,4 GHz. Y por los símbolos que aparecen en pantalla. No obstante, si se toma un poco de tiempo para leer este manual y sigue los ejemplos de programación que se detallan mas adelante, observando la reacción de las superficies de mando a

3
sus órdenes, programar esta emisora será, en poco tiempo, una rutina. Asi que sigamos adelante, aprender la programación de esta emisora no requiere mas esfuerzo que el requerido para hacer un crucigrama o un sudoku. Descubrirá que la recompensa por dominar esta simple, pero potente emi-sora programable habrá valido el esfuerzo. NOTA : A lo largo del manual hallará frecuentemente notas como esta . Estas notas recuadradas recalcan instrucciones que quizás no habrá visto a lo largo de la programación. Léalas, le harán más fácil la pro-gramación de su emisora. TECNOLOGIA HITEC AFHSS 2.4 GHz Estamos orgullosos de presentarle nuestra primera emisora en 2,4 GHz SIN MODULO. La OPTIC 6 SPORT 2.4, puede ser usada con todos los receptores HITEC aptos para recibir señales en AFHSS ( Adaptative Hoppling Spread Spectrum). La tecno-logia de nuestro sistema incluye capa-cidades telemétricas, nuestra exclusiva antena BODA (Boosted Omni-Directio-nal Antenna) y sistema SPC ( Conexión de fuerza suplementaria) para mejorar fiabilidad. Ofrecer a los aeromodelistas la última tecnologia a un precio aborda-ble ha sido siempre el objetivo de HITEC, objetivo que hemos alcanzado con la nueva HITEC OPTIC 6 SPORT. A.F.H.S.S. : Nuestro sistema usa las mas recientes tecnologías en AFHSS y nuestro sistema SCAN exclusivo para asegurar un enlace sólido como una roca y libre de interferencias entre transmisor y receptor. Al elegir el modo SCAN el sistema escanea todo el espectro de los 79 canales en 2.4 GHz para elegir los mejores canales en los que operar, facilitando, además una operatividad libre de interferencias in-cluso en los entornos mas saturados.
ANTENA B.O.D.A. : Los receptores HITEC con tecnologia AFHSS van equipados exclusivamente con la antena B.O.D.A. Test intensivos han demostrados que esta antena que equipa a nustros receptores de 6 y 7 canales tiene una recepción igual o mejor que la doble de nuestra concu-rrencia, mientras que nuestro receptor OPTIMA de 9 canales equipa una anteda BODA doble que da la seguri-dad suplementaria que todo gran mo-delo necesita. SISTEMA DE TELEMETRIA : Los re-ceptores OPTIMA 6 ofrecen únicamen-te telemetría básica: aviso de batería de recepción baja. Con los receptores OPTIMA 7 y 9, podrá disfrutar de opciones de teleme-tria tales como : Temperatura, GPS, Nivel de combustible, sensores RPM y mas cosas que iremos añadiendo en un próximo futuro. SPC (Conexión Suplementaria de Fuerza) : Tenemos el gusto de ofre-cerles la manera de suplementar la potencia en su equipo. Considerando que la mayoria de aeromodelistas usan el sistema BEC para alimentar su receptor y sus servos en sus aparatos. Los receptores HITEC OPTIMA pueden usar indistintamente una tensión de entrada de corriente entre 4,8 y 6 voltios indistintamente, pero también pueden usar el sistema SPC si cree que necesita mas fuerza de la que una batería normal pueda suministrarle. Una vez activado el sistema SPC la batería del receptor alimentara SOLO los servos, mientras que el receptor será alimentado directamente a través de la batería del motor por el puerto SPC. Necesita mas? El sistema SPC le permite a Vd. monitorizar el voltaje de la batería de propulsión usando la función telemétrica.

4
MONTAJE DEL EQUIPO : Montaje : Cuando monte cada servo, use los tacos de goma que se suministran con ellos, coloquelos en su sitio, según imagen, e inserte el ojete de metal tal como muestra la figura ( de abajo a arriba). No apriete demasiado los tornillos de sujeción de los servos. Si lo hace, o si las paredes del servo aprietan directamente contra el soporte del servo, los tacos de goma no cumplirán su misión amortiguadora de las vibraciones, lo que puede conllevar desgaste prematuro y fallos en el fun-cionamiento del servo
RECORRIDO DEL SERVO : Una vez instalado el servo en su lugar y sujetado debidamente, hagalo mover a lo largo de todo su recorrido controlando que no interfiera en el re-corrido de los demás servos y que no se observen puntos duros ni retencio-nes en el mismo. Conectelo al receptor, pongalo en marcha, haga mover el servo a través de la emisora, y controle que no se escuche ningun ruido que indique un roce anormal. Recuerde que unruido asi indicaria un servo con carga de trabajo, y que eso causaría un mayor consumo de la bateria del receptor.
GARANTIA : Lea atentamente la carta de garantia que acompaña a esta emisora, rellenela y mandela. Antes de mandar la emisora para reparación en garantia, si aparentemente no hay daño fisico (golpes.etc etc) lea las instrucciones para estar seguro de que realmente algo falla en ella, y de que la esta usando correctamente. Si aún tiene problemas, embale su emisora en el embalaje original y mándela al servicio autorizado HITEC mas próximo a su domicilio. Cerciónese de mandar con su equipo una nota indicando los problemas que ha observado en el lo mas detallada-mente posible, incluyendo detalles y condiciones de su uso, asi como una lista del material enviado. No olvide poner su nombre, dirección, e-mail y número de teléfono. AGUA, HUMEDAD Y VIBRACIONES : Vibraciones y agua : El receptor con-tiene electrónica de precisión . Cercio-nese de evitarle vibraciones, golpes y temperaturas extremas. Para su protección envuelva el receptor con la espuma de neopreno suminis-trada o use algún otro elemento absor-vente de vibraciones. Si vuela cerca de superficies de agua, es asimismo una buena idea proteger el receptor usando bolsas de plastico, asegurando el extremo abierto con una goma elática antes de envolverla en la espuma anti-vibraciones. En caso de que el receptor tuviera accientalmente un exceso de humedad, puede experi-mentar un funcionamiento intermitente o incluso una severa pérdida de control de su modelo.
5
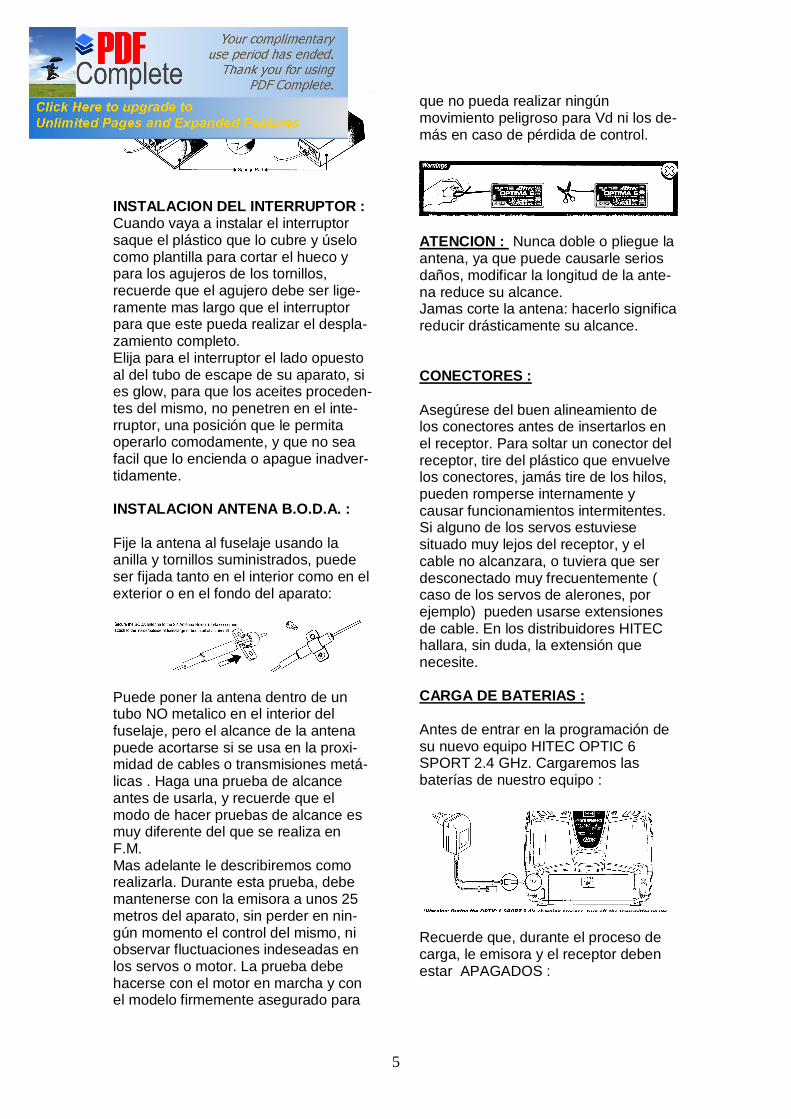
INSTALACION DEL INTERRUPTOR : Cuando vaya a instalar el interruptor saque el plástico que lo cubre y úselo como plantilla para cortar el hueco y para los agujeros de los tornillos, recuerde que el agujero debe ser lige-ramente mas largo que el interruptor para que este pueda realizar el despla-zamiento completo. Elija para el interruptor el lado opuesto al del tubo de escape de su aparato, si es glow, para que los aceites proceden- tes del mismo, no penetren en el inte-rruptor, una posición que le permita operarlo comodamente, y que no sea facil que lo encienda o apague inadver-tidamente. INSTALACION ANTENA B.O.D.A. : Fije la antena al fuselaje usando la anilla y tornillos suministrados, puede ser fijada tanto en el interior como en el exterior o en el fondo del aparato:
Puede poner la antena dentro de un tubo NO metalico en el interior del fuselaje, pero el alcance de la antena puede acortarse si se usa en la proxi-midad de cables o transmisiones metá-licas . Haga una prueba de alcance antes de usarla, y recuerde que el modo de hacer pruebas de alcance es muy diferente del que se realiza en F.M. Mas adelante le describiremos como realizarla. Durante esta prueba, debe mantenerse con la emisora a unos 25 metros del aparato, sin perder en nin-gún momento el control del mismo, ni observar fluctuaciones indeseadas en los servos o motor. La prueba debe hacerse con el motor en marcha y con el modelo firmemente asegurado para
que no pueda realizar ningún movimiento peligroso para Vd ni los de-más en caso de pérdida de control.
ATENCION : Nunca doble o pliegue la antena, ya que puede causarle serios daños, modificar la longitud de la ante-na reduce su alcance. Jamas corte la antena: hacerlo significa reducir drásticamente su alcance. CONECTORES : Asegúrese del buen alineamiento de los conectores antes de insertarlos en el receptor. Para soltar un conector del receptor, tire del plástico que envuelve los conectores, jamás tire de los hilos, pueden romperse internamente y causar funcionamientos intermitentes. Si alguno de los servos estuviese situado muy lejos del receptor, y el cable no alcanzara, o tuviera que ser desconectado muy frecuentemente ( caso de los servos de alerones, por ejemplo) pueden usarse extensiones de cable. En los distribuidores HITEC hallara, sin duda, la extensión que necesite. CARGA DE BATERIAS : Antes de entrar en la programación de su nuevo equipo HITEC OPTIC 6 SPORT 2.4 GHz. Cargaremos las baterías de nuestro equipo :
Recuerde que, durante el proceso de carga, le emisora y el receptor deben estar APAGADOS :

6
1 – Conecte el cable procedente del cargador en la toma de carga de la emisora, sita en la parte trasera izquierda. 2 – Si su receptor usa una bateria ( no BEC) conectela a la otra toma de corriente del cargador. 3 – Enchufe el cargador a la corriente. 4 – El LED rojo del cargador debe brillar, indicando que el proceso esta en marcha.. 5 – Si la luz no se enciende, verifique que la emisora esta apagada y que el interruptor del receptor tambien lo esté. 6 – las baterias (NiCad/ NiMh) deben cargar unas 15 horas aprox. Las baterias del emisor y del receptor deben ser cargadas exclusivamente con el cargador suministrado,. El uso de cargadores rápidos puede dañar las baterias reduciendo considerablemente su vida operativa. NOTA : Si debe cambiar la bateria de la emisora, no tire de los hilos. En su lugar, tire suavemente del plástico de protección del conector, en el lugar en el que se conecta a la emisora. Antes de proceder a una carga rápida de la bateria de la emisora, debe ser extraida de la misma. Sea cuidadoso si usa un cargador portátil para sus baterías. Una carga rápida puede sobrecargar sus baterias y causar un sobrecalentamiento y su destrucción prematura. Nunca cargue la bateria de su emisora o de su re-ceptor a mayor intensidad que la capa-cidad de las mismas. Por ejemplo : Su OPTIC 6 SPORT equipa una batería Ni Mh de 1300 mili-amperios de capacidad, por lo que no debe ser cargada a mas de 1,3 amp/hora. PRECAUCION : Cese de volar y ate-rrice lo antes que pueda cuando en su emisora empiece a sonar la alarma de tensión de batería baja, que se activa cuando la tensión en la misma des-ciende de los 6,6 v.
Un cable entrenador puede ser usado para ayudar a un piloto novato a aprender de manera segura, usando un segundo transmisor como maestro, operado por un piloto mas veterano. La OPTIC6 SPORT puede usar el cable #58320 o el #58321 para conectarse con cualquier otra emisora HITEC en 2.4 GHz. El cable #58320 es para conectar emisoras con batería de 6 elementos, y el #58321 entre baterías de 6 y 8 elementos. OPERANDO CON UN CABLE ENTRENADOR : NOTA : 1 - Usando el modo entrenador en formato jack estereo van a transmitir ambas emisoras. 2 – Si la emisora esclava tiene módulo de emisión, debe ser retirado. 3 – Si el módulo de emisión es fijo y por tanto no puede ser retirado, ambas emisoras deben estar en distintas fre-cuencias de emisión. Caso 1 : Uso del modo entrenador con cable tipo jack estereo #58320 entre emisoras equipadas con batería de 6 elementos. 1 – Ajuste ambas emisoras para tener idénticos movimientos (sentido y reco-rrido) y trims. Si ambas emisoras no estuvieran en la misma frecuencia, use la emisora del alumno como profesor y la del profesor como alumno. 2 – Encienda la emisora del profesor. NO encienda la del alumno. Conecte el cable #58320 el conector esta señaliza-do en la parte trasera de la emisora. Debe aparecer MASS MODE en la del profesor y ESC MODE en la del alumno. 3 – Mueva los controles de la emisora del profesor y verifique el sentido y recorrido del mando en el modelo, después verifique la del alumno y asegúrese que se correspondan. El interruptor de cesión de control esta en la parte superior derecha de la emisora. Actívela y asegúrese de que cumple su cometido.

7
4 – El profesor tiene el normal control sobre el aparato, a menos que pulse el botón TRAINER, momento en el que el alumno tiene el mando. Si el estudiante pierde el control del aparato, el profesor lo recupera instantáneamente, al soltar el botón. Caso 2 : Uso del sistema TRAINER con un cable entre un jack estereo y una clavija DIN. Cable #58321. este cable permite la conexión entre una emisora con batería de 6 elementos, como la OPTIC 6 Sport 2.4 GHZ o una Aurora 9 y una OPTIC 6 2.4 o una Eclipse 7 2.4 El conjunto contiene un cable con clavijas DIN #58320 con toma DIN para el TEACHER (profesor) y un adaptador DIN/Jack estereo para el alumno NOTA : esta seccion solo le enseñara como conectar los cables a las emiso-ras. Por favor, lea la seccion anterior sobre la operatividad. Caso 3: El profesor usa clavija Jack estereo y el alumno una toma DIN : 1 – Encienda la emisora del profesor, la que esta equipada con toma jack stereo. 2 – Enchufe el cable #58320 en la emi-sora MASTER (la del profesor). Obser-vara como aparece la palabra MASS en la pantalla de la emisora MASTER. 3 – Conecte el adaptador DIN , marca-do STUDENT al final del cable del conector stereo. Esto le permitira co-nectarlo a la emisora del alumno, que esta equipada con una toma DIN. 4 – Enchufe la toma DIN en la emisora del alumno. 5 – Para acabar, encienda la emisora del alumno. Una vez enchufada, la emisora del alumno no emitirá señal de radio mientras el cable este enchu-fado. NOTA : En las emisoras provistas de toma DIN, NO APARECE indicación alguna de que el cable DIN esta en-chufado.
Caso 4 : Conexión de un sistema pro-fesor/alumno con el profesor equipado con una toma DIN y con el alumno pro-visto de conector jack stereo. 1 – Conecte el cable adaptador #58320 con toma DIN, al que enchufara el extremo MASTER del cable. 2 – Encienda la emisora del instructor. 3 - Conecte la toma DIN a la emisora MASTER. 4 – la emisora del alumno DEBE estar APAGADA. 5 – Enchufe la clavija Stereo en la emi-sora del alumno. Se encenderá auto-maticamente y en pantalla aparecerá la mención SLV MOD, que significa que la emisora ha sido reconocida como estu-diante o esclava. 6 – recuerde que la emisora NO EMITI-RA si el cable no esta correctamente conectado, a pesar de que, aparente-mente, la emisora tenga corriente. NOTAS : 1 - NO ENCIENDA LA EMISORA ALUMNO EQUIPADA CON JACK STEREO. Las emisoras equipadas con ese cable son alimentadas auto-máticamente. 2 – Las emisoras conectadas con un sistema entrenador funcionan cada una con su propia batería. Las bate-rías, tanta la del profesor como la del alumno, deben estar cargadas y co-rrectamente instaladas cuando se use el modo entrenador. 3 – Es aconsejable sujetar el cable a la emisora con un simple nudo para evi-tar una desconexión eventual en vuelo. También puede usarse una ligadura hecha con cinta aislante.
Otros ajustes Longitud de los sticks ajustable Puede cambiar la longitud de los sticks para que su manejo le sea más cómodo. Para alargar o encoger los sticks, primero deberá desbloquearlos sujetando firmemente B y haciendo girar A en sentido contrario a las agujas del reloj. Una vez desbloqueado, haga

8
girar B arriba o abajo para alargarla o acortarla; cuando esté a su gusto, bloquéelo sujetando firmemente la parte inferior y girando B sentido inverso de las agujas del reloj hasta que se bloqueen los sticks.
Cambio del modo del transmisor Optic La mayoria de las emisoras OPTIC se sirven para ser usadas en modo 2, sin embargo, si desea usarla en modo 1 tiene una opción en el menú inicial para cambiarlo. Una vez seleccionado modo 1 en el menú, debe proceder a modificar los sticks de la emisora para que trabajen en modo 1. Para ello, siga estos pasos : 1 – Retire los paneles laterales de la emisora cuidadosamente. 2 – Afloje y retire los 6 tornillos de la parte trasera de la caja de la emisora. 3 – Cambie de lado las placas de cobre 4 – Ajuste nuevamente la tensión de ambos stick 5 – Vuelva a montar la tapa, apriete los tornillos, y coloque los laterales.
Ajuste de la tensión del stick Puede ajustar la tensión del stick para sentirse más cómodo. Para ajustar los muelles, deberá retirar la tapa trasera de su transmisor sacando los 6 tornillos que la sujetan. Guárdelos en lugar seguro. Mediante un destornillador fino de estrella, haga girar los tornillos de ajuste hasta alcanzar la tensión deseada. La tensión aumenta girando en el sentido de las agujas del reloj y disminuye en el sentido contrario. Cuando estén a su gusto, vuelva a colocar cuidadosamente la tapa trasera y atornille los 6 tornillos sin apretarlos demasiado.

9
OPTIC 6 SPORT 2.4 :
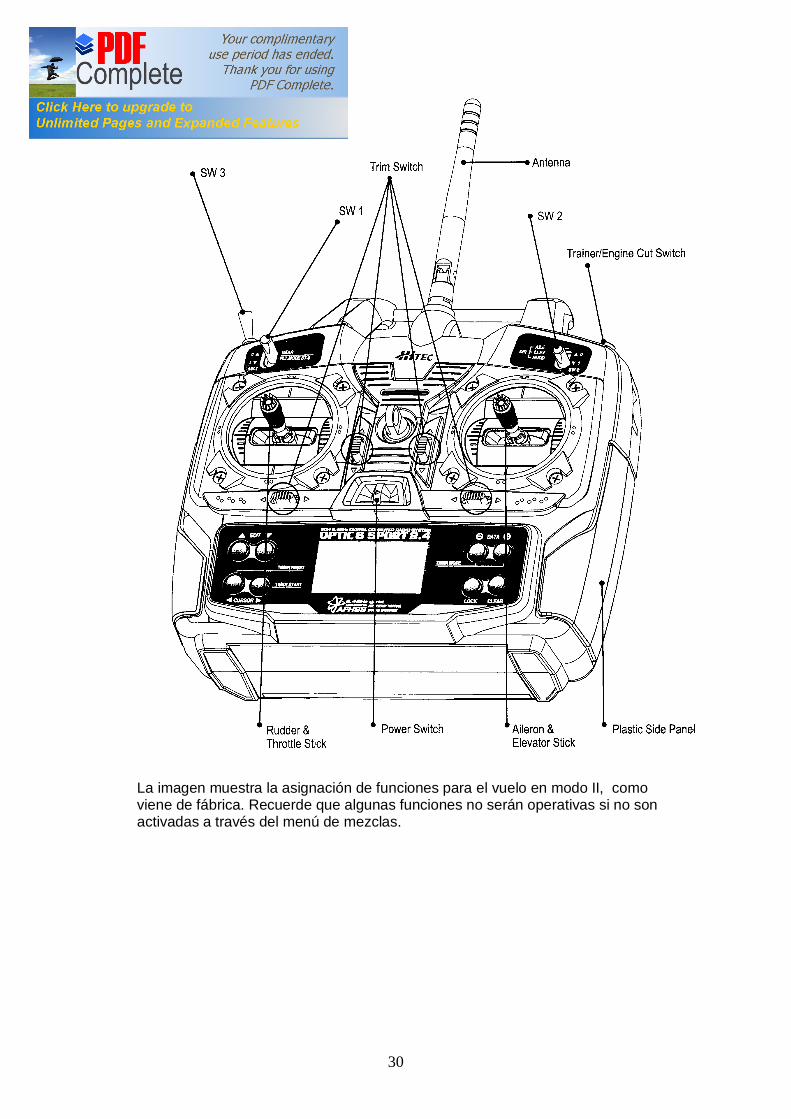
Controles y asignación de interruptores
La imagen presenta la asignación de comandos por defecto para modo II, que es el modo “normal” elegido por la fábrica. Algunas funciones solo son operativas una vez activadas con el sistema de menús.
10
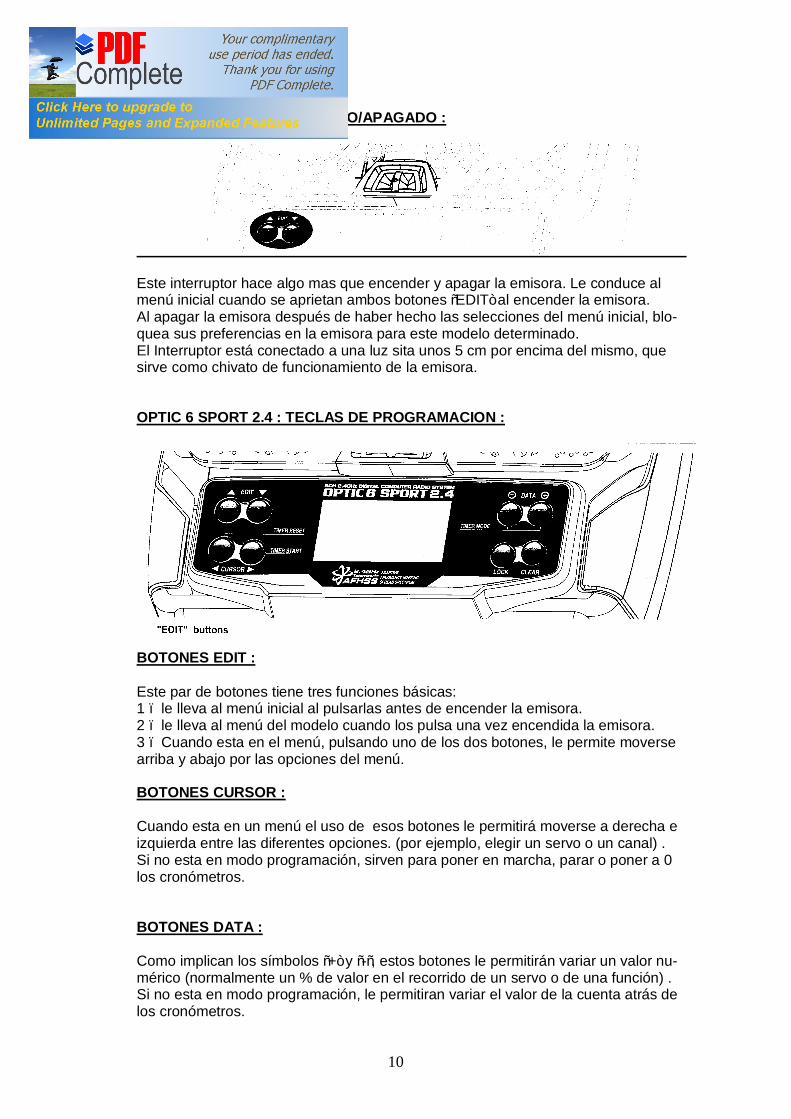
INTERRUPTOR DE ENCENDIDO/APAGADO :
Este interruptor hace algo mas que encender y apagar la emisora. Le conduce al menú inicial cuando se aprietan ambos botones “EDIT” al encender la emisora. Al apagar la emisora después de haber hecho las selecciones del menú inicial, blo-quea sus preferencias en la emisora para este modelo determinado. El Interruptor está conectado a una luz sita unos 5 cm por encima del mismo, que sirve como chivato de funcionamiento de la emisora. OPTIC 6 SPORT 2.4 : TECLAS DE PROGRAMACION :
BOTONES EDIT : Este par de botones tiene tres funciones básicas: 1 – le lleva al menú inicial al pulsarlas antes de encender la emisora. 2 – le lleva al menú del modelo cuando los pulsa una vez encendida la emisora. 3 – Cuando esta en el menú, pulsando uno de los dos botones, le permite moverse arriba y abajo por las opciones del menú. BOTONES CURSOR : Cuando esta en un menú el uso de esos botones le permitirá moverse a derecha e izquierda entre las diferentes opciones. (por ejemplo, elegir un servo o un canal) . Si no esta en modo programación, sirven para poner en marcha, parar o poner a 0 los cronómetros. BOTONES DATA : Como implican los símbolos “+” y “-“, estos botones le permitirán variar un valor nu-mérico (normalmente un % de valor en el recorrido de un servo o de una función) . Si no esta en modo programación, le permitiran variar el valor de la cuenta atrás de los cronómetros.

11
BOTON LOCK : Este botón es, básicamente, una medida de seguridad para modelos motorizados. Al pulsarlo el canal del motor del modelo se bloquea, asi un movimiento ene falso del mando del motor, no variara su regímen. Adopte el habito de usar esta función, como medida de seguridad, cuando manipule modelos motorizados (por ejemplo : para llevarlo a la linea de salida ).
NOTA : Mantenga sus manos siempre alejadas de una hélice o un rotor en movimiento aunque haya activado la funcion lock. Un falso movimiento puede activar el motor!
BOTON CLEAR : Use este botón siempre que quiera restablecer el valor inicial de una función . Tambien es usado en los menús P MIX TRM para activar o desactivar una función. CONTROLES DEL JOYSTICK : JOYSTICK DERECHO :
Asumiendo que volamos en modo II, tal como viene de fábrica, este stick controla el elevador (hacia delante es bajar y hacia atrás es subir) y los alerones (derecha e izquierda) JOYSTICK IZQUIERDO :
Siguendo en el supuesto que volamos en modo II, este stick controla el timón de dirección (derecha e izquierda) y el control del motor : arriba mas velocidad, abajo menor. En motores eléctricos abajo es parado y en termicos, posición de ralentí. Si el modo de vuelo elegido es GLID (planeador) en el menú inicial, este stick, en vez del gas, controla los alerones y flaps en el control de descenso, en la opción llamada CROW . INTERRRUPTOR SW-1 :
12
Dependiendo de la linia inicial de programación que haya elegido, este interruptor puede ser usado para levantar/bajar el tren de aterrizaje , controlar la potencia de un motor eléctrico ( como en un planeador motorizado) o cambiar el modo de vue-lo . En modo HELI es el interruptor que bloquea el motor ( HOLD) INTERRUPTOR SW-2 : Es el interruptor para el Dual-Rate. Normalmente, en la posición “0” se obtiene el 100% del movimiento para los alerones, timon de dirección y profundidad, mientras al seleccionar la posición “1” obtenemos el movimiento reducido que hayamos pro-gramado en los ajustes del modelo. Los valores de exponencial que hayamos pro-gramado en estas superficies, se obtienen también a través de este interruptor. INTERRUPTOR SW-3 FLT MODE : Este interruptor le permite variar entre tres modos de vuelo ( un programa de pilotaje avanzado) . En modo HELI selecciona entre modo de vuelo NOR, y dos modos de vuelo acrobático. INTERRUPTOR CORTE DE MOTOR/ENTRENADOR : Si ha activado la opción “corte de motor” en la programación de su modelo, este botón sirve para apagar su motor. También funciona como como botón de aprendi-zaje cuando su emisora este unida a otra mediante el correspondiente cordón de aprendizaje. Mientras Vd. este apretando el botón, la otra emisora tendrá el control del modelo, recuperando Vd. el control a la que suelte el botón. TRIMS : Use estos potenciómetros para hacer pequeños ajustes en los servos controlados por los dos joystick. Cualquier ajuste realizado será memorizado para ese modelo particular, y sera recordado cada vez que Vd. active este modelo.

13
CARACTERISTICAS DE LA EMISORA OPTIC 6 SPORT 2.4 : Seguidamente le detallamos las instrucciones completas sobre como usar el sistema HITEC AFHSS 2.4 GHz. Y los receptores de la serie OPTIMA. Le rogamos encarecidamente estudiar esta información ANTES de usar estos productos :
1 – BOTON DE FUNCION (con doble LED indicador de estado): Este botón, con doble LED indicador de estado, tiene dos colores, rojo y azul, que le indican el estado y los cambios en los procesos en el sistema 2.4 GHz. Este botón de función es usado para conectar la emisora OPTIC con su receptor/es OPTIMA, para realizar pruebas de alcance de la emisora, y para cambiar de Modo Normal a Modo Scan. 2 – PUERTO DE CONEXIÓN DEL SISTEMA Y SALIDA DE DATOS DE SENSORES : Existe un conector de tres agujas, tipo servo en el módulo de 2.4 GHz. Usando el cable-interface HPP-22 PC podrá actualizar su programación, y descargar información desde su receptor OPTIMA 9 si esta usando equipo de sensores embarcados.
14
NOTA : Para el receptor OPTIMA 6 solo están disponibles las opciones de telemetría basicas ( aviso por bajo nivel de la bateria del receptor)
CARACTERISTICAS DEL RECEPTOR OPTIMA 6 : Tal como hemos dicho anteriormente, hay tres receptores de la serie
OPTIMA, plenamente compatibles con su emisora OPTIC 6 SPORT. El Optima 6,el Optima 7 y el Optima 9 van equipados con una varie-
dad de funciones que le proporcionaran completa satisfacción en su equipo de radio control :
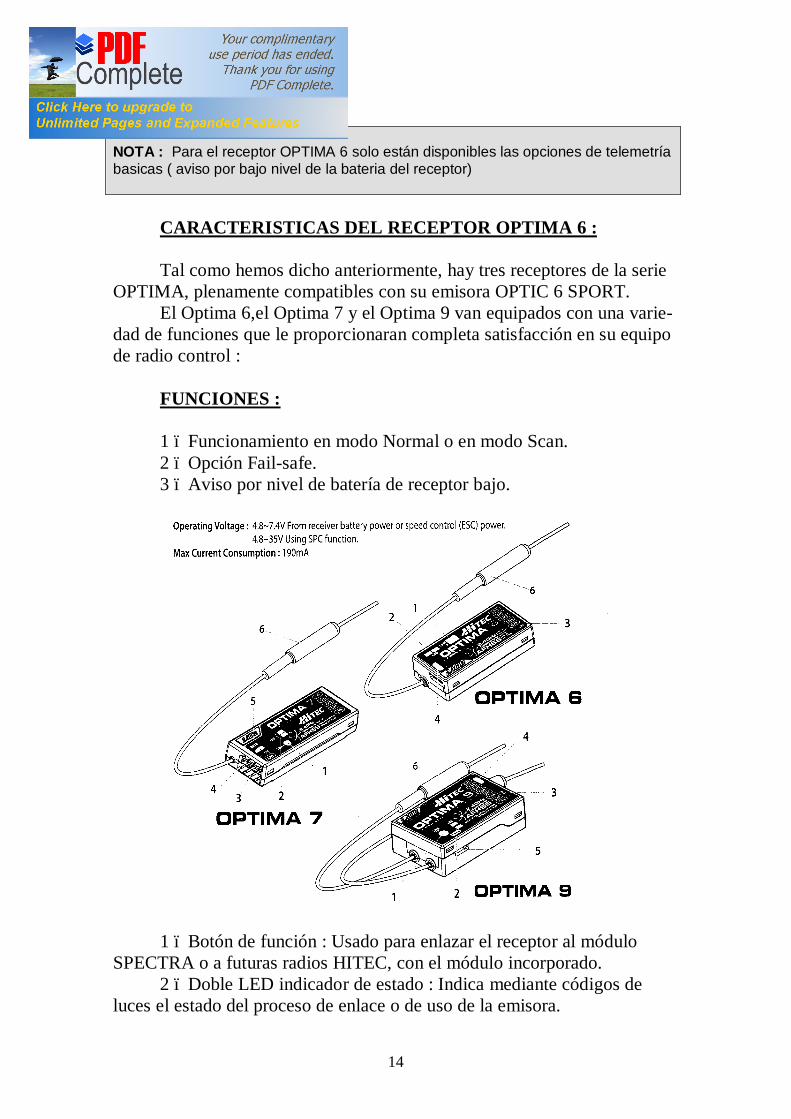
FUNCIONES : 1 – Funcionamiento en modo Normal o en modo Scan. 2 – Opción Fail-safe. 3 – Aviso por nivel de batería de receptor bajo.
1 – Botón de función : Usado para enlazar el receptor al módulo
SPECTRA o a futuras radios HITEC, con el módulo incorporado. 2 – Doble LED indicador de estado : Indica mediante códigos de
luces el estado del proceso de enlace o de uso de la emisora.

15
3 – Canales de salida y puertos de entrada de batería : Puertos de entrada/salida para baterías,servos, giroscopos y otros accesorios sitos en ambos extremos del receptor.
4 – SPC (Conexión Suplementaria de Fuerza) : para poder alimentar al receptor con corrientes de hasta 35 voltios. Mas adelante, en este manual, le facilitaremos detalles sobre esta función.
5 – Sensor de telemetría y puerto de sistemas : Una conexión de 3 pins tipo servo que solo existe en los receptores Optima 7 y Optima 9. A través del cable interface HPP-22 PC este puerto le facilita la actualización del software del receptor y la conexión con un sistema de sensores embar-cados (opcional. No disponible para el Optima 6)
6 – B.O.D.A. (Boosted Omni Directional Antena) : La antena B.O.D.A. es exclusiva del sistema AFHSS de HITEC. Varios test han demostrado que su funcionamiento es igual o mejor que usando antenas dobles. Esta sencilla antena le facilitará su instalación en cualquier modelo, y le da la seguridad de recepción deseable en cualquier modelo, incluidos los de gran escala. Su instalación es simple y sencilla: inserte la antena dentro de su soporte y péguelo donde desee.
DIAGRAMAS DE CONEXIÓN DE RECEPTORES OPTIMA : Para motores glow, gasolina o eléctricos que usen una batería de
alimentación independiente.
Aeroplano con propulsión eléctrica, con variador de velocidad :

16
NOTAS : Le recomendamos el uso de B.E.C. de gran capacidad. Si la cantidad de corriente consumida por los servos y el receptor fuera mayor que la suministrada por el BEC, podria dar lugar a problemas de recepción.
CARACTERISTICAS DE LOS RECEPTORES OPTIMA
: Ajustes y uso del sistema HITEC 2.4 Ghz : Para encender el equipo use siempre esta secuencia :
Enlace emisora – receptor : Su sistema HITEC AFHSS usa un protocolo de comunicación que
enlaza e identifica su receptor Optima a su emisora. Una vez emisora y receptor están enlazados ningún otro transmisor puede interferir en su receptor durante sus operaciones. En el caso de emisoras con memoria múltiple de modelos, puede enlazar tantos receptores como necesite, uno por modelo, si es necesario.
Cada módulo y cada emisora están preparados por la fábrica para emitir en modo NORMAL, no obstante, puede cambiarlos a modo SCAN si vd lo prefiere así, usando las instrucciones facilitadas anteriormente.

17
NOTA : El modo SCAN se identifica por el destello azul y rojo del led del módulo y del receptor, y por dos BIP que suenan al encender el sistema.
El modo NORMAL se identifica por el destello en ROJO del led del módulo y del receptor, y por cuatro BIPS que suenan al encender el sistema.
MODO SCAN Y MODO NORMAL : DIFERENCIAS Los módulos y receptores de la serie OPTIMA de HITEC, tienen dos
maneras de operar, que denominamos modo NORMAL y modo SCAN. Hay 79 canales que pueden ser usados en su sistema HITEC AFHSS
2.4 GHz, a continuación les contamos como usan esos canales los modos normal y scan.
MODO NORMAL : - En este modo, el sistema usa el ajuste de frecuencias
establecido en fábrica por defecto. - El proceso cotidiano de encendido es mas rápido que el modo
scan, por lo que este modo es preferido por muchos usuarios. - En este modo, si hay una perdida de recepción en el receptor
por cualquier causa (normalmente una caída de tensión de las baterías) cuando se restablece la tensión el sistema se reco-necta y restablece muy rápidamente.
MODO SCAN : - En modo SCAN la emisora y el receptor escanearan todos los
canales disponibles cada vez que ponga en marcha el equipo. - Escogerá de entre todas las frecuencias mas “limpias” para su
uso. Este modo es muy recomendable para zonas de vuelo con mucha saturación de emisión en el entorno de 2.4 GHz.
- Mientras esté en modo SCAN si le emisora pierde potencia de emisión NO se reconectara con el receptor.

18
- Si el receptor pierde tensión tardará mas en reconectar que en modo Normal.
- En todos los casos, la conexión del equipo en modo SCAN será mas largo que en modo normal.
RECUERDE :Si el led del módulo de emisión y el del receptor están en ROJO, están conectados en modo NORMAL. Si el led del módulo de emisión y el del receptor pasa del AZUL al ROJO y viceversa, están conectados en modo SCAN
CONEXIÓN EMISORA/RECEPTOR EN MODO NORMAL : A – Una vez instalado el módulo en la emisora, pulse y mantenga
pulsado el botón del módulo. Encienda la emisora y suelte el botón. El led parpadeará en rojo mientras empieza a buscar un receptor.
Para la emisora AURORA pulse y mantenga pulsado el botón del módulo. Encienda la emisora, pulse “transmitir Si” en la pantalla de menús y después suelte el botón.
B – Pulse y mantenga pulsado el botón del receptor, encienda el receptor, cuando la luz roja del led este fija, suelte el botón del receptor. La luz roja y azul del módulo indica que esta enganchado al emisor.
C – Una luz roja fija y azul parpadeante del módulo indican que el proceso ha sido completado.
D – Apague el receptor, después la emisora. E – Encienda la emisora. La luz azul del módulo indica que esta
emitiendo en modo normal. F – Encienda el receptor, la luz roja esta fija y después de un
momento, cuando ambos están conectados, suenan 4 bips en rápida sucesión.
G – Ahora debiera tener pleno control sobre el modelo, y la emisora y el receptor están conectados en modo normal.
CONEXIÓN EMISORA/RECEPTOR EN MODO SCAN : A – Una vez instalado el módulo en la emisora pulse y mantenga
pulsado el botón del módulo, encienda la emisora, después suelte el botón. El led parpadeara en rojo buscando un receptor.
Para la emisora AURORA pulse y mantenga pulsado el botón del módulo. Encienda la emisora, pulse “transmitir Si” en la pantalla de menús y después suelte el botón.

19
B – Pulse y mantenga pulsado el botón en el receptor. Encienda el receptor. La luz del led quedara en rojo fijo. Suelte el botón al cabo de un momento, la luz del led, en rojo y azul, le indicara que se ha completado en enganche emisora/receptor.
C – La luz rojo fijo y azul intermitente en el módulo le indicara cuando el proceso se haya completado.
D – Apague el receptor, después la emisora. E – Encienda la emisora. En el módulo, el led rojo estara encendido
y el azul parpadeara. F – Encienda el receptor, se encenderá el led rojo, y, al cabo de un
momento, el azul, y el módulo emitirá dos bips. G – Ahora debiera tener pleno control sobre su modelo, y la emisora
y el receptor estarán trabajando en modo scan.
NOTAS : Estas operaciones deben ser realizadas con una distancia entre la emisora y el receptor de mas de 50 cm y menos de 5 metros. En modo SCAN si la emisora o el receptor se apagan o desconectan durante mas de 1 segundo, deben apagarse ambos y recomenzar el proceso.
Modo Normal :
20
MODOS FAIL-SAFE Y HOLD : Si usa el fail-safe y la ajusta debidamente, en caso de que el receptor
perdiera la señal de su emisora o recibiera una interferencia, los servos se moverían a la posición pre-programada durante el proceso de ajuste del fail-safe.
Si el fail-safe no estuviera activado, la señal se perdería una vez transcurrido el periodo “HOLD” (1 seg) y los servos quedarían en la última posición recibida, sin carga, hasta que una señal valida sea recibida de nuevo.
En interés de la seguridad le recomendamos que mantenga activado el fail-safe, el cual deberá estar ajustado para situar al modelo en una situación “no critica” ( motor parado o al ralenti, superficies de control en posición neutral, aerofrenos extendidos………………)
AJUSTES DEL FAIL-SAFE : A – Encender el emisor, después el receptor, espere a que el sistema
se restablezca y tenga control sobre el modelo. B – Pulse y mantenga pulsado el botón del receptor durante 6
segundos. Suelte el botón. Al cabo de 2 segundos los dos led, el rojo y el azul, parpadearán rápidamente.
C – Desde el momento en que suelte el botón empieza una cuenta
atrás de 5 segundos, durante los cuales debe situar a los controles en la posición que desea que adopten durante el fail-safe y mantenerlos asi (ejemplo : motor al ralentí, mandos a neutro, aerofrenos sacados………..)
D – Transcurridos estos 5 segundos, el sistema validará y guardara la posición. Ya puede soltar los mandos.
E – Apague el receptor, después el transmisor F – Encienda el sistema. El fail-safe está ahora activado y las
posiciones grabadas. Apague la emisora y observara como todos los mandos adoptan la posición pre-grabada para el fail-safe.

21
COMPROBACION DEL FAIL-SAFE :
Moviendo los stick a posiciones diferentes de las programadas en el
fail-safe y apagando la emisora, observará como todos los controles adoptan las posiciones previstas para el fail-safe.
APAGAR EL FAIL-SAFE Y REACTIVAR EL MODO HOLD : A – Encienda la emisora, después el receptor. Espere a que se
establezca el sistema y tenga control sobre el modelo. B – Pulse y mantenga pulsado el botón de función del receptor
durante 6 segundos y suéltelo. Al cabo de dos segundos, los leds rojo y azul parpadearán rápidamente.
C – Pulse nuevamente el botón enseguida. D – El fail-safe ha sido desactivado, y la función HOLD activada. E – Apague el receptor, luego el transmisor F – Encienda la emisora, después el receptor, el sistema esta listo
para su uso.
NOTA : Si el fail-safe es desactivado, las posiciones fijadas son BORRADAS de la memoria. Compruebe el buen funcionamiento del fail-safe antes de poner en marcha el motor.
SISTEMAS DE TELEMETRIA : Los módulos HITEC – SPECTRA 2.4 GHz. Así como los receptores
de la serie OPTIMA (excepto el Optima 6) tienen capacidades telemetricas completas e incluyen un sistema de aviso en caso de batería de recepción baja como una función básica.
AVISO DE BATERIA DE RECEPTOR BAJA :
22
Cuando un receptor de la serie Optima se pone en marcha detecta automáticamente el voltaje de la batería de recepción y distingue entre baterias de 4 elementos (4,8 v) y de 5 elementos (6 v.)
Caso de usar una batería de recepción de Li-po (2S/7,4 v.) puede variar los parámetros de aviso a través de un ordenador, usando el cable interface HPP-22 PC.
- Cuando la tensión de la batería es normal ( mayor de 4,5 v para 4 elementos y 5,6 v para 5) no emite avisos.
- Cuando la tensión de la batería es baja ( menor de 4,5 v para 4 elementos y de 5,6 v. para 5) la luz azul luce fija y la roja parpadea constantemente y se escuchan series de tres bips continuamente desde el módulo, que indican que la tensión de la batería esta bajo mínimos.
Caso de sonar la alarma estando en vuelo, le recomendamos firmemente un aterrizaje inmediato. Nuestros planes incluyen muchos mas artículos disponibles en un próximo futuro. Visite regularmente nuestra web en WWW.hitecrcd.com para mayor información.
AVISO : El indicador de tensión de batería baja es solo una referencia. La tensión real de la batería puede ser diferente. El efecto memoria en las baterías Ni-Cad Ni-Mh, pueden hacer que el avisador de tensión de batería baja no funcione correctamente. Al usar los sistemas de 2,4 GHz y servos digitales, le aconsejamos encarecidamente que use baterías de gran capacidad, comple-tamente cargadas antes de cada sesión de vuelo, y monitorizando frecuentemente el estado de las mismas.
PRUEBAS DE ALCANCE : Es altamente recomendable que, antes de cada sesión de vuelo, se
realice una prueba de alcance que confirme que la señal entre emisora y receptor es la apropiada. A diferencia de los equipos de AM/FM/PCM la antena de los equipos de 2.4 GHz es corta, asi que los sistemas tradiciona-les de pruebas de alcance no funcionaran adecuadamente.
El sistema HITEC AFHSS 2.4 Ghz posee un sistema de debilitación de señal para efectuar estas pruebas.
23
Una vez activado este sistema, reduce la fuerza de la señal durante 90 segundos, acortando la fuerza de la señal para un alcance de 30 metros (100 ft.aprox.) durante estos 90 segundos, Vd. debe alejarse del aparato, debidamente sujeto, hasta una distancia de 30 metros, manteniendo el control sobre el mismo.
COMO USAR EL DEBILITADOR DE ALCANCE : A – Pulse el botón del módulo durante 3 segundos. Los led azul y
rojo parpadearán rápidamente, seguidos de dos bip cortos. Suelte el botón, los 90 segundos de prueba empiezan al soltar el botón.
B – Aléjese del modelo debidamente sujeto, hasta una distancia de unos 30 metros, comprobando el alcance efectivo.
C – Para terminar la prueba de alcance antes de transcurridos los 90 segundos, pulse nuevamente el botón.
AVISO : Si no consigue un alcance de 30 metros con señal débil, NO INTENTE VOLAR. Haga siempre un examen pre-vuelo comprobando el movimiento de todas las superficies y su correcta respuesta al mando. Si algún mando no funciona correctamente, solvente el problema antes de arrancar el aparato. Antes de cada sesión de vuelo, realice siempre al menos UNA prueba de alcance.
Sistema S.P.C. (Conexión de potencia suplementaria) : Esta característica exclusiva de los receptores OPTIMA de HITEC le
permite alimentar directamente su receptor con una tensión de entrada comprendida entre 4,8 y 35 v. SOLO A SU RECEPTOR, los servos deben ser alimentados por un pack de baterías de entre 4,8 y 6 v o por un pack de Li-Po 2S con regulador.
Diagrama de conexión para SPC :

24
CONEXIONES RECEPTOR/SERVO : La tabla que aparece a continuación le muestra las conexiones receptor/servo en un receptor de 6 canales. Advierta que algunas funciones solo son operativas si son activadas en la emisora. La función mas habitual aparece primera en la rela-ción :
CANAL Modo ACRO Modo GLIDer Modo HELI Uno (1)
Alerón Flaperón Derecho Elevon Derecho
Alerón Alerón derecho (con ADIF)
Ciclico 1er servo de plato (con plato de 120º)
Dos (2)
Elevador Cola en V derecha Elevón Izdo.
Elevador Cola en V derecha (con VTAL)
Pitch 2º servo de plato (con plato a 120º)
Tres (3) Mando de Motor Entrada BEC
Mando de Motor Entrada BEC
Cuatro (4)
Timón de Dirección Cola en V Izda. (con VTAL)
Timón de Dirección Cola en V Izda. (con VTAL)
Rotor de cola.
Cinco (5) Tren retractil Alerón izquierdo (con ADIF)
Ganancia de giroscopio
Seis (6)
Flaps Aleron Izquierdo (con FLPN)
Flaps Paso Colectivo 3er. Servo de plato (con plato a 120º)
PANTALLA DE LA EMISORA : Cuando enciende el transmisor, aparece la primera pantalla en el display de cuarzo líquido. Antes de poner en marcha su motor, asegúrese que el número del modelo que aparece en la parte superior de la pantalla corresponde al modelo que usted desea volar ya que en caso de error el accidente seria inmediato y fatal para el avión Si pulsa “TIMER”, “ENGINE CUT(Corte de motor)” o “LOCK KEYS” accede directo a esas funciones . PANTALLA DE INICIO : Esta pantalla aparece al encender su emisora sin pulsar ninguna otra tecla.

25
El número del modelo en uso actualmente aparecerá en pantalla a la derecha del voltaje de la batería y del programa en uso para este modelo (ACRO, GLIDer o HELI), que se mostrará en la parte superior izquierda. En el centro aparece la in-dicación “NOR”, que muestra que la emisora asume un modo de vuelo NORmal.
PANTALLA INDICADORA DE BLOQUEO MOTOR : Al pulsar la tecla LOCK para bloquar el mando del motor en posición de parado o Valenti (dependiendo de si es un motor eléctrico o uno glow/gasolina) aparece en pantalla la palabra LOCK en blanco sobre fondo negro, en el centro de la pantalla, por encima del indicador de voltaje. Pulsando LOCK de nuevo, desaparece el bloqueo motor y la palabra de la pantalla, indicando que ha desactivado la función bloqueo motor. CRONOMETRO : Pulsandp ambos botones DATA simultaneamente, accederá al sistema de cronómetros de su emisora. La palabra TIMER (cronómetro) aparece en pantalla, al mismo tiempo que un número indicando el valor en minutos y segundos de la cuenta atrás programada . Pulsando el botón CURSOR derecho, el cronómetro se pondra en marcha e ira descontando a partir del valor fijado de segundo en segundo. Si vuelve a pulsarlo, la cuenta atrás se detiene. Pulsando el botón CURSOR izquierdo resetea el cronómetro.
AVISOS Y MENSAJES EN PANTALLA : AVISO POR BAJO VOLTAJE : Cuando el voltaje de la bateria desciende por debajo de 6,6 v, el indicador de voltaje en pantalla empieza a parpadear y se oye un “beep” procedente de la emisora. Si esta volando cuando eso sucede, aterrice inmediatamente y proceda a sustituir o recargar su bateria.
AVISOS POR PANTALLA ( MODO DE VUELO DIFERENTE A NORmal) : Si enciende la emisora e inmediatamente empieza a pitar mientras muestra la palabra ON en pantalla, es que alguna de los modos de vuelo diferente a NOR está activado.

26
En la parte central inferior de la pantalla, en blanco dentrod e un recuadro negro, aparece que interruptor de modo de vuelo (SW1 o SW3) debe ser devuelto a la posición NORmal.
RESUMEN : Si este es su primer aeroplano seguidamente la daremos algunos consejos que mejorarán su programación, aunque les sacará mayor provecho si continua con la lectura de este manual.
Vuelva a releerlo cuando edtr listo para empezar a ajustar su emisora. 1- Empiece definiendo el tipo correcto de programa (ACRO, GLID o
HELI) en el menú inicial. 2- Una vez elegido el programa, acceda a la función REV y cercionese
de que todos los servos giran en la dirección deseada. 3- Una vez ajustados manualmente los brazos de servo, use la función
S.TRM para terminar de ajustarlos. 4- Fije los recorridos de los servos usando la función EPA 5- Programe un valor de EXPOnencial de aprox -35% para alerones
(Canal 1) y Elevador (Canal 2) 6- Una vez ajustado su avion y a punto de vuelo, déjelo en un estante
y, usando un programa de simulación de r.c., entrenese. Pase algún tiempo rompiendo aviones virtuales, faciles de reparar, que le ahorraran mas adelante cientos de € de material y cientos de horas de reparación en el taller.
7- Listo para volar su nuevo avion? Si es afortunado, conocera a alguien que sera un piloto experimentado que podrá ayudarle en los ajustes finales y durante los primeros vuelos. Vale la pena hacer un largo desplazamiento para poder contar con su ayuda. Si no, dirijase al club de aeromodelismo mas cercano donde, seguro, encontrará a alguien que pueda ayudarle en sus primeros vuelos.
8- Si no existen esas posibilidades, tomeselo con calma y no corra riesgos innecesarios.
PROGRAMACIÓN INICIAL PARA TODO TIPO DE APARATOS : MAPA DEL MENU DE FUNCIONES BASICAS :
MODEL : SELECCIÓN DE MEMORIA PARA EL MODELO MODEL TYPE : Tipo de aparato : ACRO o GLIDer o HELIcoptero SWASH PLATE TYPE : Solo para Helicóptero : Tipo de plato : 90º ó 120º TIMER SETUP : Ajustes del cronómetro MODE : modo de vuelo 1 o modo de vuelo 2 SHIFT DIR : Modo de transmisión de señal SFT N = señal en negativo SFT P = Señal en positivo RST : Borrado de la memoria (Reset)

27
Antes de encender la emisora y empezar la programación de una de las me-morias de su modelo, asegúrese que los servos estan correctamente conectados a su canal correspondiente según el esquema de las paginas 23/24.
No encienda ahora su emisora, nosotros le diremos cuando debe hacerlo. Antes de empezar realizaremos los ajustes básicos en el menú inicial, y segui-
remos con la programación para configurar la respuesta de los servos y ajustes de recorrido para su modelo particular.
1 – Selección de memoria : Mantenga apretados ambos botones EDIT y encienda la emisora. El transmisor dará un “beep”, se encenderá el led rojo y en la pantalla aparece-rá los primeros datos del menú inicial :
Bajo la palabra “MODEL” un número aparecerá parpadeando para atraer su
atención. Si este es el primer modelo que programa en esta emisora, siga adelante y
acepte esa memoria pulsando ambos botones EDIT para pasar al menú siguiente. Cuando ya tenga varios modelos programados en su emisora, el número que
aparecerá en pantalla cuando encienda su emisora corresponderá al último modelo usado.
Para cambiar a una memoria diferente, pulse uno de los botones CURSOR para ir a otra memoria y pase a la siguiente pantalla para seleccionarla.
2 – Selección del programa básico :
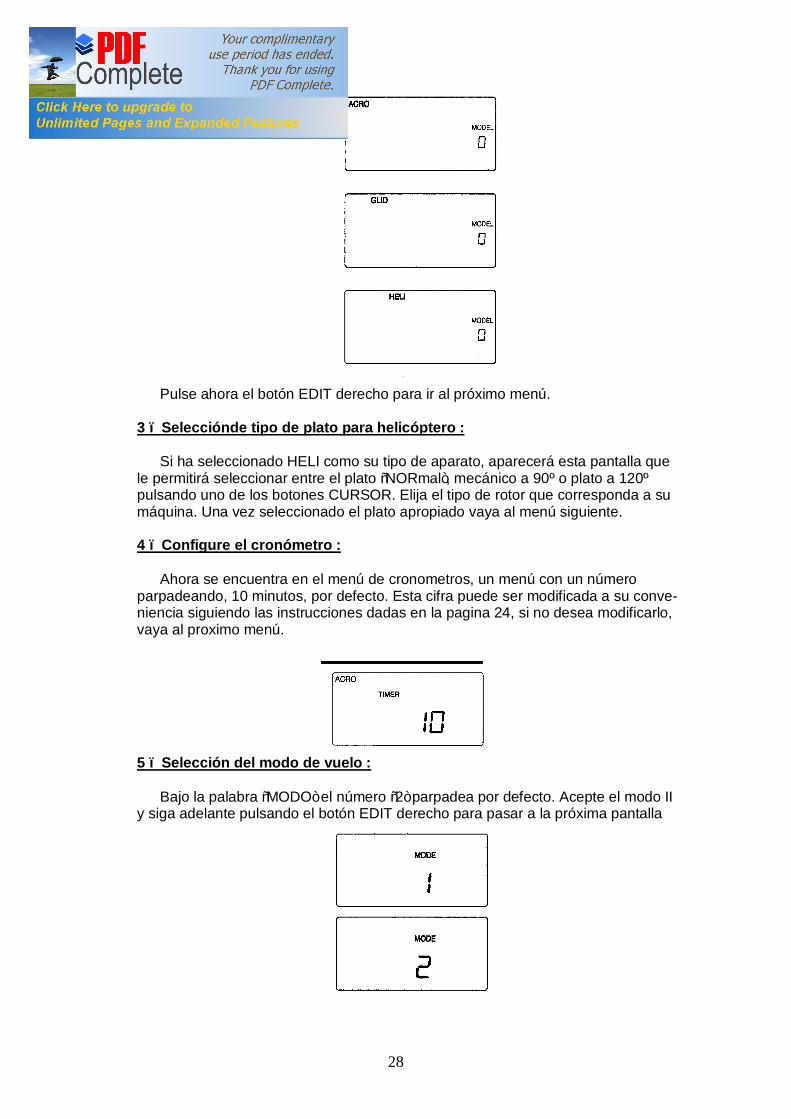
En la segunda pantalla del menú inicial los programas básicos “ACRO” “GLID” o “HELI” parpadearan .
Si queremos programar un avión motorizado, seleccionaremos ACRO, moviendonos a traves de las opciones con uno de los CURSORes. Una vez este en la pantalla correspondiente a su tipo de aparato, confirmela pulsando ambos botones DATA simultáneamente.
28
Pulse ahora el botón EDIT derecho para ir al próximo menú.
3 – Selecciónde tipo de plato para helicóptero : Si ha seleccionado HELI como su tipo de aparato, aparecerá esta pantalla que le permitirá seleccionar entre el plato “NORmal”, mecánico a 90º o plato a 120º pulsando uno de los botones CURSOR. Elija el tipo de rotor que corresponda a su máquina. Una vez seleccionado el plato apropiado vaya al menú siguiente. 4 – Configure el cronómetro : Ahora se encuentra en el menú de cronometros, un menú con un número parpadeando, 10 minutos, por defecto. Esta cifra puede ser modificada a su conve-niencia siguiendo las instrucciones dadas en la pagina 24, si no desea modificarlo, vaya al proximo menú.
5 – Selección del modo de vuelo : Bajo la palabra “MODO” el número “2” parpadea por defecto. Acepte el modo II y siga adelante pulsando el botón EDIT derecho para pasar a la próxima pantalla

29
Naturalmente, si Vd quiere usar el Modo I (elevador en el stick izquierdo, Motor en el derecho) cambie a modo 1. Recuerde, pero, que otros cambios deben ser hechos en la emisora para poder trabajar en modo 1 (vea la pagina 8 para mayor información). 6 – Resetear emisora : Ahora en pantalla debiera aparecer un “RST” parpadeando en la parte inferior derecha . RST significa reset. Si pulsa simultáneamente ambos botones DATA en esta pantalla, eso es lo que ocurrirá : Oira un doble pitido y toda la programación hecha hasta ahora volvera a los valores fijados en fábrica por defecto.
Si ahora pulsa el botón EDIT derecho para irá al principio de esta programa-ción. Hemos terminado con la programación inicial, asi que apague la emisora. Cuando la encienda de nuevo sin pulsar los botones EDIT la emisora se situará en la me-moria que hemos seleccionado durante la programación inicial anterior, y con las modificaciones realizadas vigentes.
En este punto ya habrá seleccionado el tipo del modelo : ACRO, GLID o HELI que desea ajustar. En el manual que sigue revisaremos y explicaremos detalladamente la programación de estas opciones . Empezaremos con ACRO seguida de GLIDer y HELI para terminar. Como quiera que muchas de las funciones son comunes, en los apartados GLID y HELI explicaremos solo las que les son de uso exclusivo. Para las demas, les rogamos revisen la sección ACRO.
30
La imagen muestra la asignación de funciones para el vuelo en modo II, como viene de fábrica. Recuerde que algunas funciones no serán operativas si no son activadas a través del menú de mezclas.
31
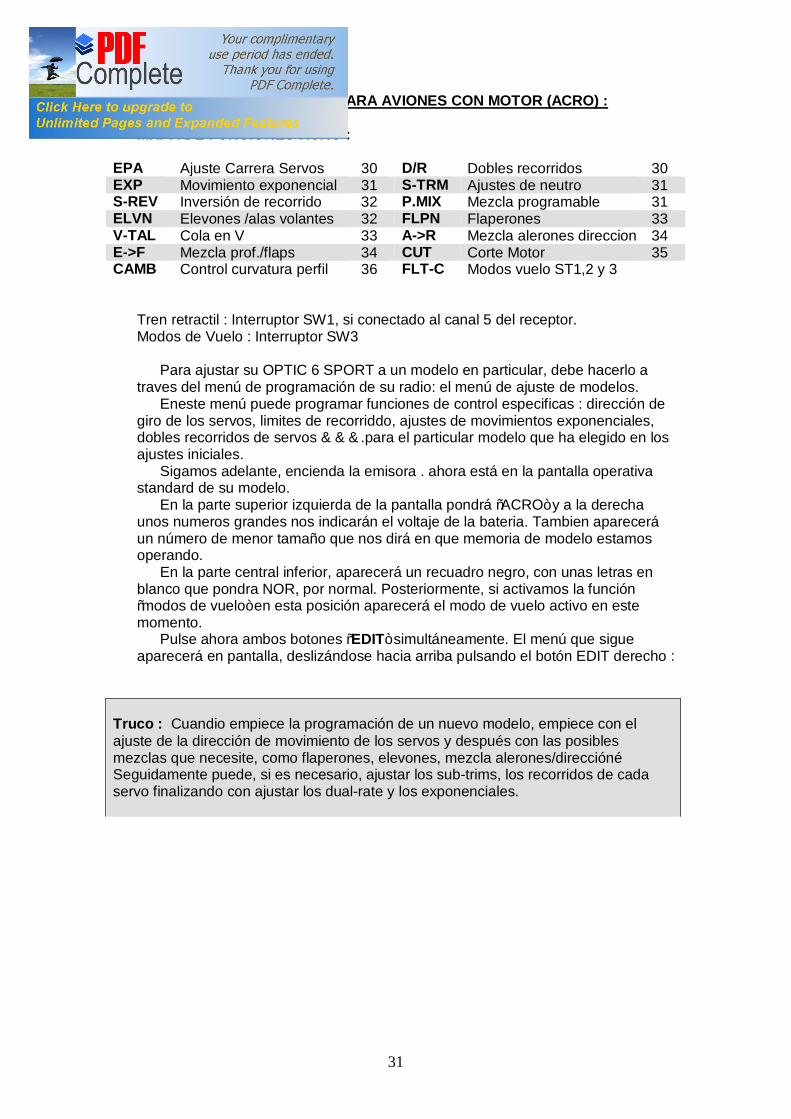
MENU DE PROGRAMACION PARA AVIONES CON MOTOR (ACRO) : MAPA DE FUNCIONES ACRO :
EPA Ajuste Carrera Servos 30 D/R Dobles recorridos 30 EXP Movimiento exponencial 31 S-TRM Ajustes de neutro 31 S-REV Inversión de recorrido 32 P.MIX Mezcla programable 31 ELVN Elevones /alas volantes 32 FLPN Flaperones 33 V-TAL Cola en V 33 A->R Mezcla alerones direccion 34 E->F Mezcla prof./flaps 34 CUT Corte Motor 35 CAMB Control curvatura perfil 36 FLT-C Modos vuelo ST1,2 y 3
Tren retractil : Interruptor SW1, si conectado al canal 5 del receptor. Modos de Vuelo : Interruptor SW3 Para ajustar su OPTIC 6 SPORT a un modelo en particular, debe hacerlo a traves del menú de programación de su radio: el menú de ajuste de modelos. Eneste menú puede programar funciones de control especificas : dirección de giro de los servos, limites de recorriddo, ajustes de movimientos exponenciales, dobles recorridos de servos……….para el particular modelo que ha elegido en los ajustes iniciales. Sigamos adelante, encienda la emisora . ahora está en la pantalla operativa standard de su modelo. En la parte superior izquierda de la pantalla pondrá “ACRO” y a la derecha unos numeros grandes nos indicarán el voltaje de la bateria. Tambien aparecerá un número de menor tamaño que nos dirá en que memoria de modelo estamos operando. En la parte central inferior, aparecerá un recuadro negro, con unas letras en blanco que pondra NOR, por normal. Posteriormente, si activamos la función “modos de vuelo” en esta posición aparecerá el modo de vuelo activo en este momento. Pulse ahora ambos botones “EDIT” simultáneamente. El menú que sigue aparecerá en pantalla, deslizándose hacia arriba pulsando el botón EDIT derecho :
Truco : Cuandio empiece la programación de un nuevo modelo, empiece con el ajuste de la dirección de movimiento de los servos y después con las posibles mezclas que necesite, como flaperones, elevones, mezcla alerones/dirección… Seguidamente puede, si es necesario, ajustar los sub-trims, los recorridos de cada servo finalizando con ajustar los dual-rate y los exponenciales.

32
E.P.A . (END POINT ADJUSTEMENT/AJUSTE DE FINAL DE CARRERA) :
La función EPA esta pensada para ajustar o limitar el recorrido de un servo. Puede ser fijado en cualquier punto entre el 0 y el 125% en cada sentido. Reducir el porcentaje implica reducir el recorrido del brazo del servo en uno de los sentidos. Esta función es usada para prevenir averías en los servos por posición forzada. NOTA : Le recomendamos que antes de ajustar la función EPA confirme primero que el servo se mueva en el sentido deseado. De no ser asi, corríjalo usando la función REVERSE si fuera necesario. Seguidamente ajuste el centrado de las superficies de control mecánicamente tanto como pueda centrando perfectamente los brazos de los servis y ajustando las varillas y Kick-links entre los servos y la escuadra de mando. Después puede usar la función sub-trim para terminar de ajustar el neutro del servo a la perfección.

33
AJUSTANDO LOS RECORRIDOS DE SERVO : En este menú de funciones puede ajustar el recorrido de los servos – alerones, elevador, motor, direccion, flaps ( si usa dos servos para alerones) ó tren de aterrizaje bien para limitar el recorrido de las superficies de mando, bien para que la posición final del servo no sea forzada.
RECUERDE que si fija el recorrido del servo en 0% no obtendrá respuesta del servo en esa direccion. Si programa 0% en ambos sentidos, el servo NO actuara
Cuando entre en el menú E.P.A. le aparecerá, por defecto la pantalla anterior. El Ch 1 (alerón derecho) aparecerá parpadeando y el valor de su recorrido será del 100%. Si mueve el stick hacia la derecha, vera las letras L/U que aparecen encima del 100 cambiar a R/D. Vamos a ver como podemos cambiar los valores de recorrido independientemente para cada sentido .
CONSEJO : Las instrucciones que siguen a continuación para ajustar los puntos finales de recorrido de alerones estan pensadas para un aeromodelo que use UN SOLO servo de alerones. Este servo deberá estar conectado al CH 1 del receptor. Si su aeromodelo usa DOS servos, uno para cada aleron, en modo ACRO haga lo siguiente : enchufe el servo DERECHO en el canal 1 del receptor y el servo IZQUIERDO en el canal 6 del receptor. Active la mezcla de flaperones como se muestra en la pagina 38. Ajuste el sentido de giro y el recorrido del servo caso de ser necesario. Si su aeromodelo usa DOS servos para alerones en modo GLIDer, enchufe el servo de alerones derecho en el canal 1 y el izquierdo en el canal 5, active la funcion ADIF, (diferencial de alerones) tal como se muestra e la pagina 47. Ajuste el sentido de giro y el recorrido de los servos caso de ser necesario.
AJUSTE DE RECORRIDO DE SERVOS PARA APARATOS DE UN SERVO DE ALERONES :
34
1 – Para ajustar el movimiento de alerones para giro a derechas (aleron derecho arriba y izquierdo abajo) lleve el mando del stick todo a la derecha y mantengalo ahí. El alerón derecho debe subir y las letras R/D aparecen en pantalla sobre el porcentaje de movimiento, significando que esta ajustando el alerón derecho. 2 – Si su servo queda bloqueado o forzado oirá un zumbido. Pulse la tecla “- DATA” hasta que el zumbido se detenga. Si el servo no zumba, deje el recorrido al 100%. Si es posible sitúe el movimiento del servo para que quede entre el 90 y el 100%. 3 – Para ajustar el movimiento a la izquierda, lleve el stick al tope de la izquierda y mantengalo alli. En pantalla aparecerá L/U, si el servo zumba, ajuste el recorrido con la tecla “- DATA” hasta que el zumbido cese. Si el servo no zumba, aplique el mismo valor que ha fijado para el aleron derecho. AJUSTE DEL ELEVADOR : 1– Para ajustar el movimiento del servo del elevador pulse en el cursor derecho hasta que CH2 parpadee. Lleve ahora el stick derecho hacia Vd. y mantengalo ahí. Las letras L/U deben aparecer en pantalla sobre el % de movimiento. El movimiento hacia abajo del stick debe corresponder a un movimiento hacia arriba del elevador. Escuche nue-vamente por si el servo zumbara, en este caso usando la tecla “-DATA” ajuste el valor del movimiento hasta que el servo deje de zumbar. Si el servo no zumbase, deje el movimiento en el 100% de su valor. 2– Repita el paso precedente para el movimiento hacia abajo, poniendo el stick en la posición superior. Las letras R/D deben aparecer en pantalla. Cuando el eleva-dor esté en su posición compruebe que el servo no este ni zumbando ni bloqueado, ajuste el recorrido en caso necesario. AJUSTE DE MOTOR : 1- Para ajustar la posición del motor en RALENTI, primero vuelva a la pantalla
normal pulsando ambos botones DATA simultáneamente. Ajuste el trim de motor para que en pantalla aparezca un valor del 0%.
2- Vuelva al menú E.P.A. y pulse el botón CURSOR derecho, hasta que el canal 3 parpadee en pantalla. Mueva ahora el stick motor hasta el extremo inferior de su recorrido y mantengalo ahí. Las letras L/U deben aparecer en pantalla, sobre el valor del recorrido. Pulse el botón –DATA hasta que el servo cierre casi completamente el carburador (posición de ralentí) Cuando encienda el motor, puede ajustarlo, si es necesario abriendo o cerrando la posición de ralentí para que el motor no se apague accidentalmente, a traves del botón del trim motor.
3- Para ajustar el motor a plena potencia, mueva el stick al extremo superior y mantengali ahí. Las letras R/D debieran aparecer sobre el porcentaje de movi-miento.
4- Escuche atentamente por si el servo estuviera forzado – que se indica con un zumbido del propio servo- en caso de ser asi, pulse el botón –DATA hasta que cese el zumbido. Si el servo no zumba, deje el recorrido al 100% o ajuste la varilla de mando para que el carburador quede plenamente abierto.
AJUSTE DE CARRERA DE TIMON DE DIRECCION :
1- Para ajustar el movimiento a la derecha del timón, pulse el CURSOR derecho hasta que el indicador cambie a CH4. Lleve el stick a la derecha y mantengalo alli.

35
2- Las letras R/D deben aparecer en pantalla justo por encima del porcentaje de mando. Escuche atentamente por si el servo estuviera forzado – que se indica con un zumbido del propio servo- en caso de ser asi, pulse el botón –DATA hasta que cese el zumbido. Si el servo no zumba, deje el recorrido al 100%
3- Puede aumentar o disminuir este porcentaje dependiendo de la brusquedad con la que reaccione el modelo cuando se acciona el mando.
4- Repita el mismo proceso para el lado izquierdo, AJUSTE DE FLAPS O TREN DE ATERRIZAJE : De la misma forma que se describe anteriormente, puede ajustar los valores de EPA para el canal 5º (flaps o tren de aterrizaje) si su modelo dispone de estos mecanismos. En las instrucciones del fabricante de su modelo, hallará los valores de mando más adecuados al mismo. La mayoría de fabricantes publícan datos en sus manuales de montaje con dos valores para las superficies de mando, unos para el movimiento máximo y otros para mínimos, contando que el cliente usará el Dual-Rate. DUAL RATE (D/R) : Si esta es su primera emisora computerizada, quizas hubieramos debido hablarle antes de los dual-rate. Este programa le permite reducir el mando de alero-nes, profundidad o dirección simplemente moviendo un interruptor (SW2 en nuestra emisora). Son empleados para reducir el mando cuando se vuela a grandes veloci-dades, Sin esta opción, es posible que, aun moviendo los controles con extrema suavidad, su aparato de respuestas muy bruscas si se esta moviendo rápido. Cuando cambia a movimiento reducido, (dual rate) reduce instantáneamente la deflexión de las superficies de mando lo que se traduce en una reducción radical de las reacciones a las órdenes recibidas de la emisora. Esta capacidad es muy apreciada por los pilotos veteranos, y muy útil para los novatos. La cantidad de reducción (o incremento, para acrobacia extrema) del mando puede fijarse en cualquier cantidad entre el 0 y el 125%. Vaya al menú de dual rates pulsando uno de los botones EDIT repetidamente, hasta que aparezca la opción en pantalla. NOTA : Recuerde que si fija el valor del dual rate en un valor próximo a “0” no obten-drá respuesta del mando en este canal, lo que puede conducir a un siniestro total del aparato.
1- Pulse el botón CURSOR derecho, y seleccione el canal 1 ( aparece
destelleando, es el que sale por defecto) el valor que aparece en pantalla debería ser el 100% . Advierta el pequeño “ 0” que aparece detrás del 100%
36
indica que el valor del movimiento es este cuando el interruptor SW2 que está en la esquina superior derecha de la emisora, está en la posición “0” del interruptor (compruebe la etiqueta del interruptor). Muevalo hacia delante, a la posición 1 y verá como el “0” después del 100, se transforma en un 1. De momento dejaremos el valor en el 100% para la posición “0” del interruptor, y moveremos el interruptor a la posición “1”.
2- Con el interruptor SW2 en la posición “1” reduciremos el valor del movimiento al 75% pulsando en la tecla “-DATA”. Una vez hecho, observaremos que al pasar el interruptor de la posición “0” a la “1”, el mando del aleron es solo el 75% del total. Con el avión en vuelo es facil determinar si el 75% es suficiente reducción, si no, baje el avión y ajustelo nuevamente.
AJUSTE DE DUAL-RATES EN EL ELEVADOR : Pulsando la tecla “CURSOR” derecho una vez cambiara al canal 2, elevador,que aparecerá parpadeando. Con el interruptor SW2 en posición 1, ajuste el recorrido al 75% del total. AJUSTE DE DUAL RATES EN TIMON DE DIRECCION : Pulsando la tecla “CURSOR” derecho, vaya al Ch 4. Ajuste el dual rate del timón de direccion de la misma manera que los alerones y elevador precedentemente descritos.
NOTA : Para volver a los valores por defecto (100%) simplemente pulse CLEAR
NOTA : Si tiene activada la opción “modos de vuelo”, puede fijar posiciones de Dual rate para cada modo de vuelo independientemente.
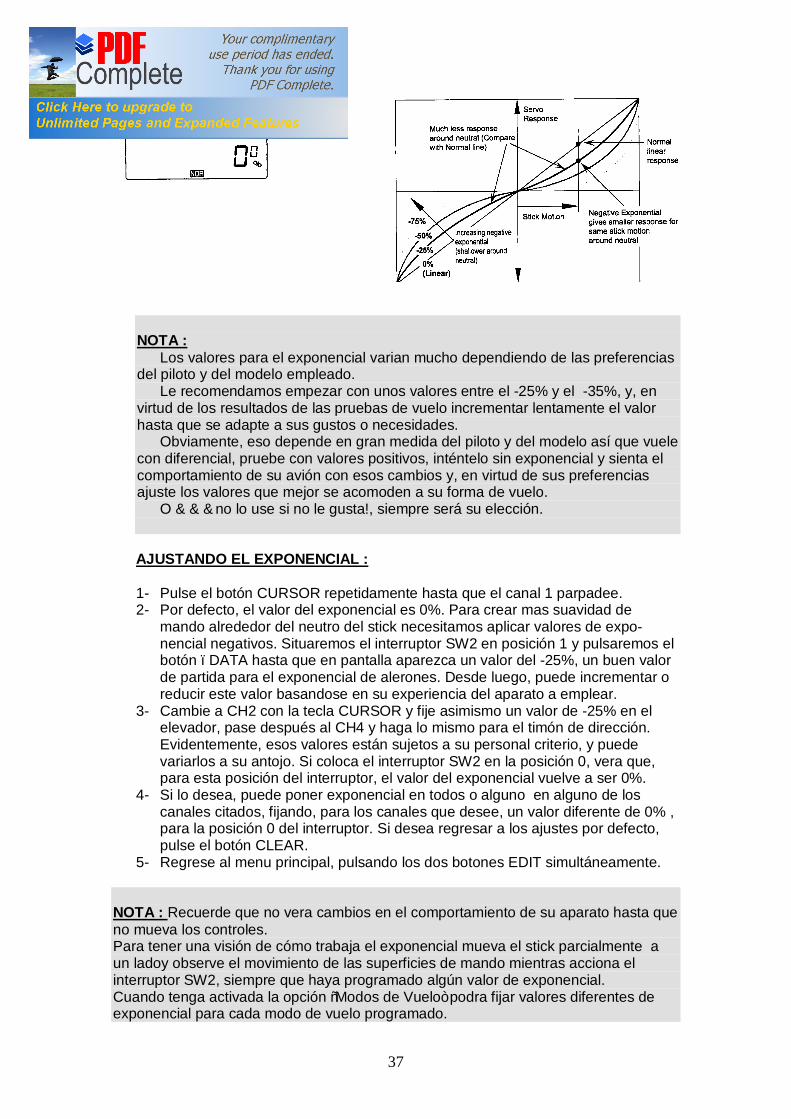
EXPONENCIALES : El exponencial es un programa altamente recomendable tanto para principian-tes como para pilotos expertos. Pruebelo! Su vuelos será mas suave y mas controlable reduciendo el stress que muchos novatos sienten cuando estan aprendiendo a volar. Esta función, que será nueva para aquellos que acceden por primera vez a una radio computerizada, permite al usuario elegir un valor exponencial para alerones, profundidad y dirección. Aplicar exponencial le permite a vd “suavizar” el movimiento de los sticks alre-dedor del neutro, lo que minimiza la respuesta del mando a los movimientos de los sticks cerca del punto central. Cuanto mayor valor negativo aplique menor efecto tendrá el movimiento de los sticks alrededor del neutro, lo que nos permite compensar movimientos indeseados sobre el stick. Contrariamente, un valor positivo hará que el movimiento del stick cerca del neutro sea muy alto, y menor cuando nos alejemos del mismo. De la misma manera que con el Dual rate, puede activar o desactivar este movimiento con el interruptor SW2.
37
NOTA : Los valores para el exponencial varian mucho dependiendo de las preferencias del piloto y del modelo empleado. Le recomendamos empezar con unos valores entre el -25% y el -35%, y, en virtud de los resultados de las pruebas de vuelo incrementar lentamente el valor hasta que se adapte a sus gustos o necesidades. Obviamente, eso depende en gran medida del piloto y del modelo así que vuele con diferencial, pruebe con valores positivos, inténtelo sin exponencial y sienta el comportamiento de su avión con esos cambios y, en virtud de sus preferencias ajuste los valores que mejor se acomoden a su forma de vuelo. O………no lo use si no le gusta!, siempre será su elección.
AJUSTANDO EL EXPONENCIAL : 1- Pulse el botón CURSOR repetidamente hasta que el canal 1 parpadee. 2- Por defecto, el valor del exponencial es 0%. Para crear mas suavidad de
mando alrededor del neutro del stick necesitamos aplicar valores de expo-nencial negativos. Situaremos el interruptor SW2 en posición 1 y pulsaremos el botón –DATA hasta que en pantalla aparezca un valor del -25%, un buen valor de partida para el exponencial de alerones. Desde luego, puede incrementar o reducir este valor basandose en su experiencia del aparato a emplear.
3- Cambie a CH2 con la tecla CURSOR y fije asimismo un valor de -25% en el elevador, pase después al CH4 y haga lo mismo para el timón de dirección. Evidentemente, esos valores están sujetos a su personal criterio, y puede variarlos a su antojo. Si coloca el interruptor SW2 en la posición 0, vera que, para esta posición del interruptor, el valor del exponencial vuelve a ser 0%.
4- Si lo desea, puede poner exponencial en todos o alguno en alguno de los canales citados, fijando, para los canales que desee, un valor diferente de 0% , para la posición 0 del interruptor. Si desea regresar a los ajustes por defecto, pulse el botón CLEAR.
5- Regrese al menu principal, pulsando los dos botones EDIT simultáneamente. NOTA : Recuerde que no vera cambios en el comportamiento de su aparato hasta que no mueva los controles. Para tener una visión de cómo trabaja el exponencial mueva el stick parcialmente a un ladoy observe el movimiento de las superficies de mando mientras acciona el interruptor SW2, siempre que haya programado algún valor de exponencial. Cuando tenga activada la opción “Modos de Vuelo” podra fijar valores diferentes de exponencial para cada modo de vuelo programado.
38
S.TRM ( Sub Trims ) : Esta es una función programable que le permite ajustar individualmente el centrado fino de cada uno de sus servos, independientemente de los trims que hay al lado de cada uno de los sticks de la emisora para ajustes en vuelo. Antes de acceder a esta función, le recomendamos el ajuste manual de los elementos que conforman la transmisión de mando de manera mecánica ( centrando lo mejor posible el brazo del servo, alargando o acortando la longitud de las transmi-siones etc) con los botones de los trims del transmisor centrados a 0. Le recomendamos, asimismo, que mantenga los valores de sub-trims lo mas bajos poibles ya que grandes valores pueden restringir el movimiento de los servos. AJUSTANDO LOS SUB-TRIMS : La mejor opción es hacerlo con el avión delante suyo, con la emisora y el receptor en marcha, para poder comprobar el reslutado de nuestras acciones al modificar los sub-trims.
1- Empezando por el CH1 (alerones) usaremos los botones +/- DATA para incrementar o disminuir el valor del sub-trim hasta que la superficie de mando esté debidamente alineada en el modelo.
2- Cambie al CH2 (profundidad) y alinee el elevador de la misma forma. 3- Siga cambiando de canal y repita el proceso las veces que sea necesario en
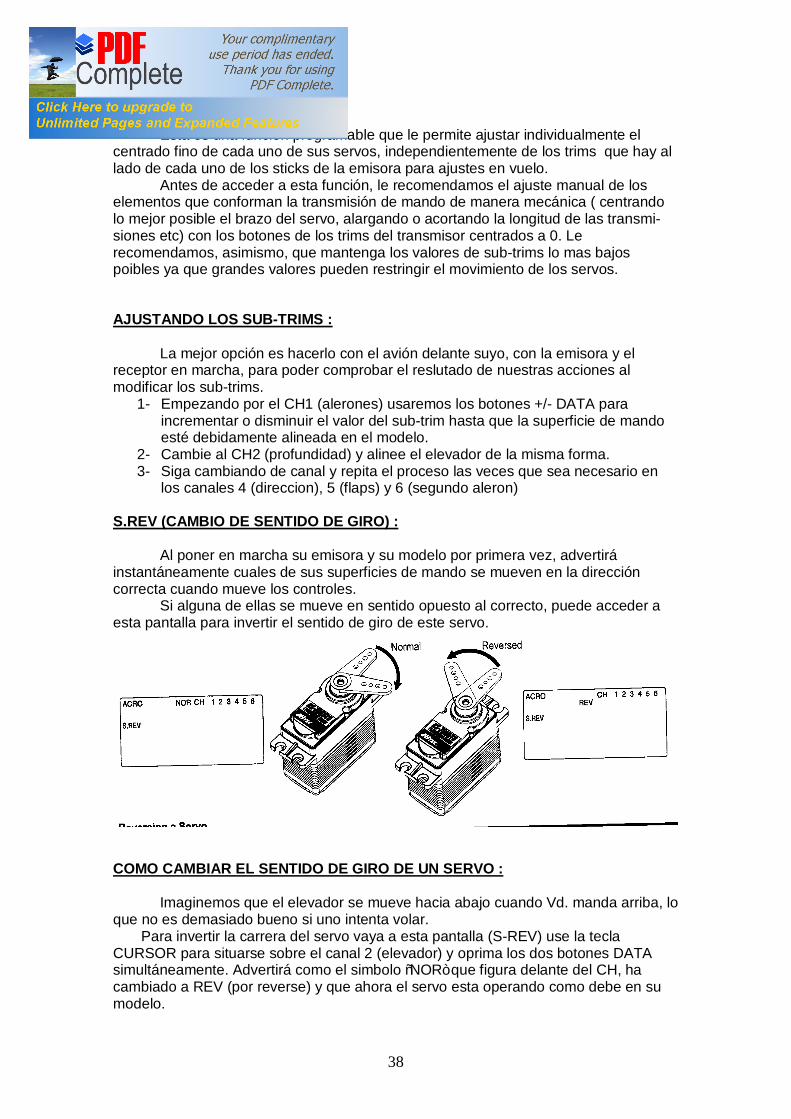
los canales 4 (direccion), 5 (flaps) y 6 (segundo aleron) S.REV (CAMBIO DE SENTIDO DE GIRO) : Al poner en marcha su emisora y su modelo por primera vez, advertirá instantáneamente cuales de sus superficies de mando se mueven en la dirección correcta cuando mueve los controles. Si alguna de ellas se mueve en sentido opuesto al correcto, puede acceder a esta pantalla para invertir el sentido de giro de este servo.
COMO CAMBIAR EL SENTIDO DE GIRO DE UN SERVO : Imaginemos que el elevador se mueve hacia abajo cuando Vd. manda arriba, lo que no es demasiado bueno si uno intenta volar.
Para invertir la carrera del servo vaya a esta pantalla (S-REV) use la tecla CURSOR para situarse sobre el canal 2 (elevador) y oprima los dos botones DATA simultáneamente. Advertirá como el simbolo “NOR” que figura delante del CH, ha cambiado a REV (por reverse) y que ahora el servo esta operando como debe en su modelo.

39
Si algún otro servo debiera ser invertido, ya lo sabe : CURSOR sobre el canal, ambas teclas DATA simultáneamente y………..hecho!
P.MIX (MEZCLA PROGRAMABLE) : Esta pantalla le permite activar la habilidad que posee la OPTIC 6 SPORT de
crear una mezcla programable a su gusto. Puede mezclar el movimiento de dos ser-vos cualesquiera, uno de los cuales será “esclavo” del otro.
Es una función relativamente avanzada. El programa le facilita, incluso, la manera de cambiar el valor de la respuesta tanto del esclavo como del master.
Por ejemplo, puede “esclavizar” el elevador al mando del gas, de tal manera que, al incrementar la potencia del motor, se produzca un ligero movimiento descendente de la profundidad, para mantener el nivel de vuelo.
Otra mezcla típica seria mezclar el timón de dirección con el gas para contrarrestar el efecto del par motor.
El programa de mezclas de la OPTIC 6 SPORT le ofrece una función avanzada llamada TRM P MIX que le permite, al ser activada, trimar ambos servos con el mismo botón de trim de la emisora. Opción muy útil si, por ejemplo, esta usando dos servos para controlar la profundidad en un timón de profundidad con superficies independien-tes controladas cada una por su servo.
AJUSTANDO UNA MEZCLA MOTOR/DIRECCIÓN : Cuando aplica plena potencia a un motor, el par motor resultante de la hélice
girando hace que, a menudo, el avión tienda a desviarse a un lado (normalmente el izquierdo).
Esto no solo interfiere con la precisión en las maniobras acrobáticas, sino que dificulta mantener la alineación del modelo en la pista durante el despegue. Para redu-cir la acumulación de tareas del piloto durante la fase de despegue, manteniendo la alineación del aparato con el eje de la pista sin tener que corregir manualmente el timón de dirección, puede usar el P.MIX que le proporcionará automáticamente un cierto movimiento del timón de dirección para contrarrestar el desvío causado por el par motor.
Veamos como : 1- Entre en el menú principal y navegue por el mismo hasta P.MIX con los
botones EDIT. Active la función pulsando ambos botones DATA simul-táneamente. La mención INH (inhabilitado) que aparece en pantalla cam-biara a CH con las siglas MAS parpadeando debajo. Al mismo tiempo, apareciese un valor de porcentaje, use el cursor derecho hasta ir a esa configuración : CH y MAS debajo, parpadeante. A la derecha de CH aparece también un número, el 1 por defecto.
2- Para hacer del canal motor el canal dominante o master, Pulse DATA hasta que cambie a 3. Pulse nuevamente el CURSOR derecho. En pantalla aparecerán las siglas SLV (esclavo) parpadeando, seguido de un número. Con el botón DATA cámbielo a 4. En este momento, el timón de dirección es “esclavo” del motor.

40
3- Pulse el botón CURSOR nuevamente : MAS 3 y un porcentaje parpadearan. Usando los botones DATA fije un valor para la mezcla. Un valor negativo moverá el timón en sentido opuesto.
4- Seguramente no necesitara mas del 15% para contrarestar el efecto del par motor, pero solo las pruebas de vuelo lo confirmarán.
P.MIX TRIM : Comno ajustar un doble servo para el elevador, con trims coordinados : La OPTIC 6 SPORT le ofrece una inusual y sofisticada posibilidad con la función P.MIX : La posibilidad de trimar dos servos simultáneamente. Esa posibilidad es especialmente útil si esta usando dos servos para controlar el elevador (uno para cada semi-elevador independiente). Como quiera que, durante el vuelo, el elevador necesita ser trimado, puede hacer los ajustes con el botón de trim inferior derecho, en vez de tener que acceder a la programación y trimarlos desde alli independientemente. Veamos como :
1- Entre en la función P.MIX y elija los servos master y esclavo. (2 y 5 para hemi elevadores) y fije el valor del recorrido (cercano al 100%) a menos que su siste-ma de transmisión de mando no tenga recorridos identicos.
2- Usando el CURSOR derecho cambiaremos a la pantalla P.MIX donde las siglas TRM parpadearan. Cambie la opción OFF que aparece por defecto, a ON pulsando CLEAR.
3- Salga del menú y ya tiene un elevador separado con trims comunes.

41
ELVN (Mezcla de Elevones) :
Si esta usando un avion con alas en delta o un ala volante, usará este progra-ma para activar las mezclas pre-programadas de elevones, que combinan los movi-mientos del canal 1 (alerones) con los del canal 2 ( profundidad ). Tal como ya le dijimos en el reparto de conexiones del receptor, ene ste caso los elevones ocupan los canales 1 y dos del receptor. Es necesario hacerlo asi ya que, en estos aparatos, los alerones tambien actúan como elevadores. NOTA : Advierta que, al activar ELEVONES las opciones FLAPERON y COLA en V quedan indisponibles automáticamente de la memoria AJUSTANDO ELEVONES :
1- Active la función ELEVONES pulsando ambos botones DATA mientras está en la pantalla de ELEVONES. Pruebe ahora a ver que sucede moviendo el stick de alerones y observara como estos de mueven a derecha e izquierda y también arriba y abajo.
2- Caso de no moverse adecuadamente, use la funcion S.REV e invierta el funcionamiento del servo correspondiente.
NOTA : Es posible, debido a la particular configuración de los servos en ese programa, que el invertir un servo no solucione el problema, puede tener los alerones funcionando correctamente y no poder controlar la profundidad. Puede solventar este problema programando valores NEGATIVOS en la carrera de uno de los servos. Una opción que suele funcionar también, es intercambiar la conexión de los servos.
3- Fije ahora la cantidad y dirección del recorrido de cada uno de los servos, tanto del elevador como de alerones. Las alas volantes son muy sensibles al mando de profun-didad ya que las superficies de mando están muy próximas al centro de gravedad del modelo, por lo que necesitamos mucho menos mando de profundidad que de alero-nes.
4- De momento, deje el mando del MAS en el 100% (a menos que los servos suenen forzados)y ponga el CURSOR sobre SLV1 que tambien dejaremos en el 100%, Pasamos el cursor sobre MAS2 y reducimos el valor al 40%, vamos con el CURSOR sobre SLV2 y lo dejamos al 40% asimismo.
5- Si en la función elevador, uno de los servos no actuase correctamente, fije el porcentaje con valor negativo.
6- Si volando el avión cree que el elevador manda excesivamente o no manda suficiente, aterrize y reduzca o aumente el porcentaje del elevador, Si tiene
42
excesivo mando de alerones, puede optar por reducir el recorrido de los mismos o poner dual-rates.
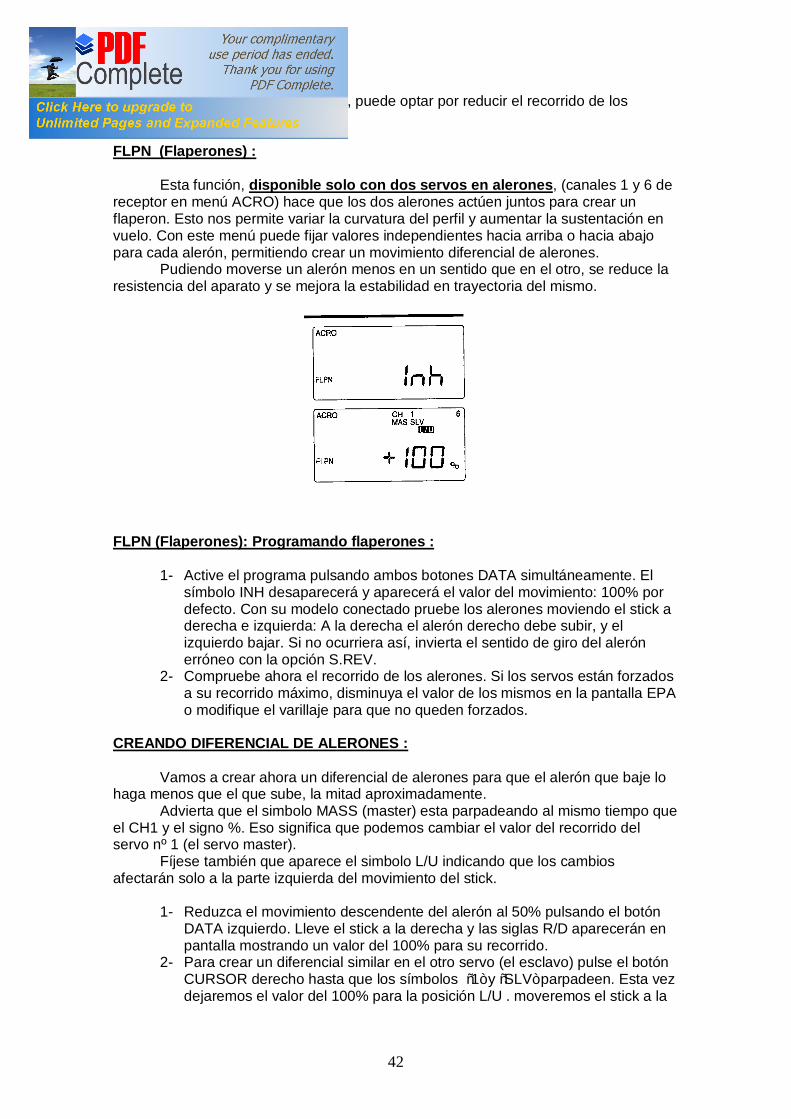
FLPN (Flaperones) : Esta función, disponible solo con dos servos en alerones, (canales 1 y 6 de receptor en menú ACRO) hace que los dos alerones actúen juntos para crear un flaperon. Esto nos permite variar la curvatura del perfil y aumentar la sustentación en vuelo. Con este menú puede fijar valores independientes hacia arriba o hacia abajo para cada alerón, permitiendo crear un movimiento diferencial de alerones. Pudiendo moverse un alerón menos en un sentido que en el otro, se reduce la resistencia del aparato y se mejora la estabilidad en trayectoria del mismo.
FLPN (Flaperones): Programando flaperones :
1- Active el programa pulsando ambos botones DATA simultáneamente. El símbolo INH desaparecerá y aparecerá el valor del movimiento: 100% por defecto. Con su modelo conectado pruebe los alerones moviendo el stick a derecha e izquierda: A la derecha el alerón derecho debe subir, y el izquierdo bajar. Si no ocurriera así, invierta el sentido de giro del alerón erróneo con la opción S.REV.
2- Compruebe ahora el recorrido de los alerones. Si los servos están forzados a su recorrido máximo, disminuya el valor de los mismos en la pantalla EPA o modifique el varillaje para que no queden forzados.
CREANDO DIFERENCIAL DE ALERONES : Vamos a crear ahora un diferencial de alerones para que el alerón que baje lo haga menos que el que sube, la mitad aproximadamente. Advierta que el simbolo MASS (master) esta parpadeando al mismo tiempo que el CH1 y el signo %. Eso significa que podemos cambiar el valor del recorrido del servo nº 1 (el servo master). Fíjese también que aparece el simbolo L/U indicando que los cambios afectarán solo a la parte izquierda del movimiento del stick.
1- Reduzca el movimiento descendente del alerón al 50% pulsando el botón DATA izquierdo. Lleve el stick a la derecha y las siglas R/D aparecerán en pantalla mostrando un valor del 100% para su recorrido.
2- Para crear un diferencial similar en el otro servo (el esclavo) pulse el botón CURSOR derecho hasta que los símbolos “1” y “SLV” parpadeen. Esta vez dejaremos el valor del 100% para la posición L/U . moveremos el stick a la

43
derecha, y al aparecer R/D disminuiremos el valor del recorrido hasta el 50% usando el botón –DATA.
Ahora tenemos establecido un diferencial en ambos alerones, que deben moverse hacia abajo la mitad del movimiento hacia arriba. Estos valores deberán ser ajustados mediante pruebas en vuelo observando el comportamiento del aparato en los giros. V.TAL ( cola en V ) : Este es otro de los programas disponibles en su OPTIC 6 SPORT, que mezcla el timón de direccion y la profundidad, para poder controlar los aparatos provistos de este tipo de cola. De manera parecida a como lo hacen los flaperones, las dos superficies de mando pueden moverse arriba y debajo de forma coordinada (para el control del elevador) o inversa, para controlar la direccion.
RECUERDE : si elige cola en V, el programa de ELEVONES no puede ser usado en este aparato.
PROGRAMANDO UNA COLA EN V :
1- Active el programa pulsando ambos botones DATA al mismo tiempo. La pantalla cambiará. INH será sustituido por un valor porcentual de movimiento.
44
2- Con su modelo conectado, verifique el buen sentido de giro de la profundidad y de la dirección. Use el S.REV si fuera necesario.
3- Para una programación básica de la cola en V, puede dejar el valor en el 100% de los recorridos.
4- Si desea ajustar una mezcla alerones/dirección siga las indicaciones dadas para esta mezcla en la pagina 45. Emplee un pequeño porcentaje de mezcla para giros coordinados aleron/dirección, o dejela al 100% si su aparato no lleva alerones.y quiere volar usando el stick derecho.
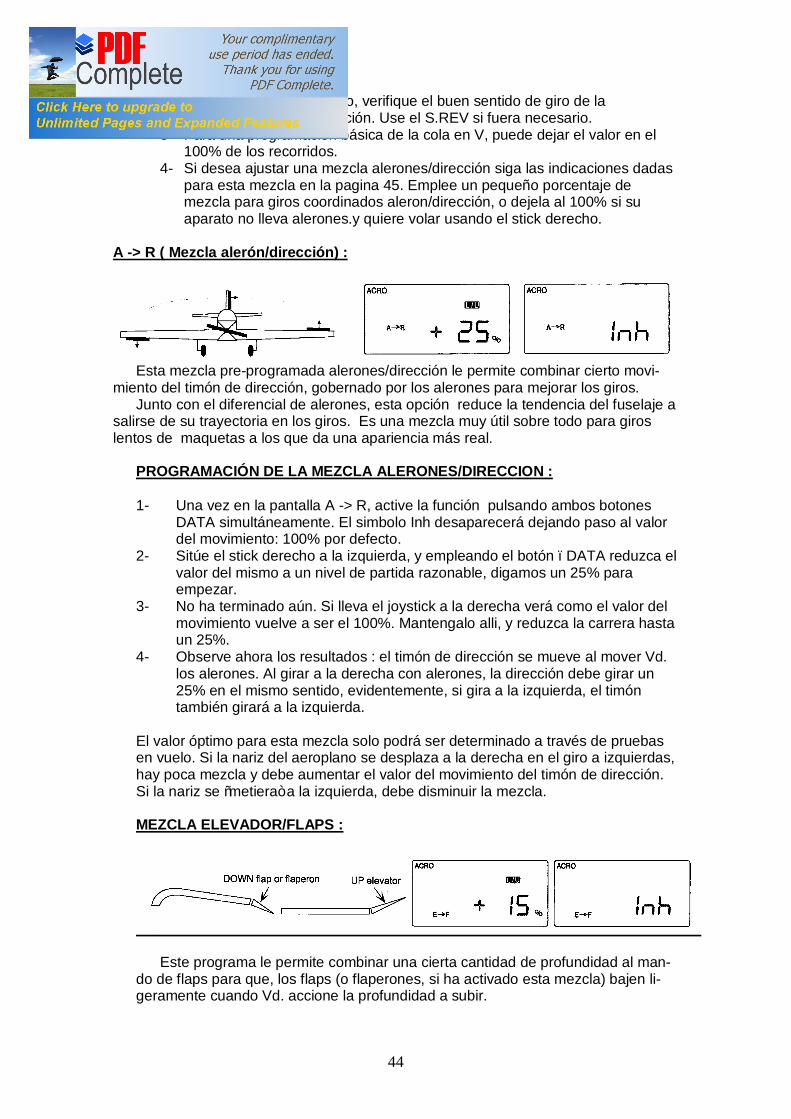
A -> R ( Mezcla alerón/dirección) :
Esta mezcla pre-programada alerones/dirección le permite combinar cierto movi-
miento del timón de dirección, gobernado por los alerones para mejorar los giros. Junto con el diferencial de alerones, esta opción reduce la tendencia del fuselaje a
salirse de su trayectoria en los giros. Es una mezcla muy útil sobre todo para giros lentos de maquetas a los que da una apariencia más real.
PROGRAMACIÓN DE LA MEZCLA ALERONES/DIRECCION : 1- Una vez en la pantalla A -> R, active la función pulsando ambos botones
DATA simultáneamente. El simbolo Inh desaparecerá dejando paso al valor del movimiento: 100% por defecto.
2- Sitúe el stick derecho a la izquierda, y empleando el botón –DATA reduzca el valor del mismo a un nivel de partida razonable, digamos un 25% para empezar.
3- No ha terminado aún. Si lleva el joystick a la derecha verá como el valor del movimiento vuelve a ser el 100%. Mantengalo alli, y reduzca la carrera hasta un 25%.
4- Observe ahora los resultados : el timón de dirección se mueve al mover Vd. los alerones. Al girar a la derecha con alerones, la dirección debe girar un 25% en el mismo sentido, evidentemente, si gira a la izquierda, el timón también girará a la izquierda.
El valor óptimo para esta mezcla solo podrá ser determinado a través de pruebas en vuelo. Si la nariz del aeroplano se desplaza a la derecha en el giro a izquierdas, hay poca mezcla y debe aumentar el valor del movimiento del timón de dirección. Si la nariz se “metiera” a la izquierda, debe disminuir la mezcla. MEZCLA ELEVADOR/FLAPS :
Este programa le permite combinar una cierta cantidad de profundidad al man-do de flaps para que, los flaps (o flaperones, si ha activado esta mezcla) bajen li-geramente cuando Vd. accione la profundidad a subir.

45
Esta es una de las mezclas habituales para los que hacen carreras pylon o acrobacia 3-D ya que el movimiento descendente del flap combinado con el as-cendente de la profundidad permite al avión girar mas rápidamente. AJUSTE DE LA MEZCLA ELEVADOR/FLAPS : 1- En la pantalla E-F active la función pulsando ambas teclas DATA al mismo
tiempo. El simbolo “Inh” desaparece sustituido por un valor numérico (100% por defecto).
2- Ponga el stick derecho en posición “subir” tirando de el hacia Vd. en este momento, con el avión mirando hacia Vd. fije el valor de flaps que desee para la posición “todo a subir”. Un buen punto de partida seria un 15%, pero, como siempre, solo las pruebas en vuelo determinarán el valor óptimo de la mezcla.
3- Finalmente, lleve el stick hacia delante y fije el porcentaje de mezcla en el 0%. No seria buena idea que los flaps subiesen cuando vd empujara la profundidad.
CUT ( Corte de Motor) :
En esta pantalla ajustaremos el movimiento del stick del motor para que se pare inmediatamente en caso de necesidad (siempre que la posición del stick este en su mitad inferior), pulsando un botón (Engine cut) sito en la esquina superior derecha de la emisora
. PROGRAMANDO CORTE DE MOTOR :
1- Una vez en la pantalla CUT, active la función pulsando ambos botones DATA simultáneamente. Aparece en pantalla un porcentaje de valor, por defecto el 0%.
2- Use las teclas DATA para cambiar ese valor, que puede ser positivo o negativo hasta un 75% máximo. El objetivo es llevar el barrilete del carburador a la posición de completamente cerrado, extinguiendo el funcionamiento del motor.
3- Este movimiento se activa pulsando el interruptor “Engine Cut” sito en la esquina superior derecha del transmisor.
4- Observe cuidadosamente el movimiento del servo del gas. Si la mezcla tiene un valor demasiado alto, puede quedar forzado originando una descarga excesiva de la batería o un sobrecalentamiento del servo. El servo debe cerrar el barrilete sin quedar forzado.
CAMB ( Modificaciones en la curvatura del perfil) : Este programa le permite a Vd. mezclar alerones con flaps para cambiar la curvatura del perfil alar hacia arriba o hacia abajo.

46
Estos cambios en la curvatura del perfil le permiten aumentar la sustentación para unos aterrizajes mas lentos, o, en un modelo a escala, volar mas lentamente y de manera mas realista. Tambien podrá ajustar una cierta compensación de profundidad para neutralizar la tendencia del modelo a levantar el morro cuando bajan los flaps y los alerones.
PROGRAMANDO CAMBER Y COMPENSACION DE PROFUNDIDAD :
1- Para usar los alerones como flaperones y bajar al unísono para incrementar la curvatura del perfil alar, lo primero que necesitamos es ir a la pantalla FLT-C para activar los flaperones y que sean gobernados a través del interruptor SW3. sito en la parte superior derecha de la emisora. Use el botón EDIT derecho para volver a la pantalla FLT-C.
2- Coloque el interruptor SW3,de tres posiciones, en posición central. LLevelo hacia Vd. y vera como el simbolo “Inh” desaparece. El “NOR” en blanco dentrod e un cajetin negro, cambia a “ST2” . Active esta posición del interruptor pulsando ambas teclas DATA simultáneamente. Ahora podemos empezar a fijar valores para alerones y profundidad (para compensar) para esta posición del interruptor.
3- Vuelva una pantalla atrás con el botón EDIT hasta la pantalla CAMB. 4- Con el interruptor SW3 en posición central (posición NOR) asegurese que
el valor asignado a los canales 1, 2 y 6 sea del 0%. Lleve ahora el interruptor hacia Vd. a la posición ST2 y usando las teclas DATA fije un valor para el alerón derecho del 25% ( este valor puede ser positivo o negativo dependiendo del sentido de giro del servo).
5- Con ola tecla CURSOR nos vamos al canal 6 (aleron izquierdo) y procedemos de la misma manera.
6- Para compensar la tendencia a subir que tendrá nuestro aparato con esos ajustes, nos situaremos sobre el canal 2 y ajustaremos un porcentaje entre el 5 y el 15% aproximado de profundidad abajo.
Como siempre, le advertimos que estos valores son indicativos y que, solo las pruebas en vuelo, determinarán el valor exacto de los mismos.

47
FLT.C ( MODOS DE VUELO ) :
Esta es una función muy sofisticada de la OPTIC 6 SPORT. Programandola, le permitira disponer de hasta cuatro modos de vuelo diferentes para cada modelo, usando los interruptores SW1 y SW3. Para cada uno de esos modos de vuelo, puede programar cantidades diferen-tes de dual-rate, exponencial, flaperones y compensación de profundidad para cada posición de interruptor. Le hemos mostrado antes las posibilidades de esta mezcla al mostrarle como programar curvatura de alerones (camb). La posibilidad de programar hasta cuatro modos de vuelo diferentes para cada aparato, con dual-rates y exponenciales diferentes, le permite ciertas ventajas muy útiles cuando esta volando con condiciones meteorologicas cambiantes o esta realizando acrobacia avanzada. IMPORTANTE : Si enciende su emisora con alguno de los interruptores que controlan los modos de vuelo activados, la radio se pondrá en marcha emitiendo pitidos y en pantalla aparecerá información sobre que interruptor está activado. Si esto ocurre, simplemente mueva el/los interruptor/es a su posición neutra y el pitido desaparecerá y el símbolo NOR en blanco sobre fondo negro, aparecerá en la parte central inferior de la pantalla. PROGRAMANDO MODOS DE VUELO :
1- Coloque los interruptores SW1 y SW3 en posición normal: el SW1 en “0” y el SW3 en posición media.
2- Para activar un modo de vuelo en el interruptor SW1, lleve el interruptor a la posición “1” y pulse ambos botones DATA simultáneamente. El símbolo INH cambiara a “ON” y “ST3” parpadeará. Lleve otra vez el interruptor SW1 a la posición “0”.
3- Para activar dos modos mas de vuelo, lleve el interruptor SW3 desde su posición intermedia (NOR) hacia atrás. Active el modo de vuelo “1” pulsando simultáneamente ambos botones DATA. El símbolo “Inh” cambiara a “On” y la mención ST1 parpadeara en pantalla.
4- Lleve el interruptor SW3 hacia adelante y active el modo de vuelo ST2 pulsando nuevamente ambos botones DATA. El símbolo “Inh” cambiará a “On” y ST2 parpadeará.
5- La posición media de SW3 es, por defecto, el cuarto modo de vuelo. Para activar un cierto modo de vuelo mientras está en el aire, simplemente mueva el interruptor apropiado. Recuerde que es SW1 el que activa o desactiva cualquier

48
posición de SW3. PROGRAMANDO MODOS DE VUELO CON DIFERENTES AJUSTES : Vamos a programar dos valores para dual rates y exponencial adicionalmente a los ya establecidos con el SW3 en el centro, posición NORmal. Asumimos que las posiciones ST1 y ST2 han sido ya activadas como enseñabamos en el capítulo precedente.
1- entre en el menú principal pulsando los dos botones EDIT con la emisora en marcha.
2- Vaya al menú DUAL RATES (D/R) accionando el boton EDIT derecho. El CH1 debe parpadear y el simbolo NOR aparecer resaltado en la parte inferior de la pantalla, bajo el valor por defecto : 100%. Si no fuera asi, puede restablecer este valor inmediatamente pulsando la tecla CLEAR. Al lado del 100% un “0” pequeño nos indica que el interruptor SW2 esta en la posición “0” déjelo ahí.
3- Usando uno de los botones DATA seleccione un valor para los alerones en el CH1. Una vez hecho, mueva el interruptor SW2 a la posición “1” y seleccione otro valor de alerones para esta posición. Esto serian las posiciones del Dual Rate para el modo NORmal de vuelo.
4- Para establecer un segundo par de ajustes para los alerones, en modo de vuelo ST1, lleve el interruptor SW3 hacia atrás. En pantalla aparecerá ST1. Fije ahora unos nuevos valores para alerones con el interruptor SW2 en posición 0 y después en posición 1.
5- Para establecer un tercer par de ajustes de alerones para la condición de vuelo ST2 lleve el interruptor SW3 hacia delante. En la parte inferior de la pantalla aparecerá la indicación ST2. Fije ahora nuevos valores para los alerones en la posición 0 del interruptor, y después en la 1.
6- Si desea ajustar nuevos valores para los dual rates del elevador y dirección, repita los tres pasos anteriores, operando sobre los canales 2 (profundidad) y 4 (dirección).
7- Tambien puede establecer exponencial en dos modos de vuelo: Vaya al manú de EXPOnencial y repita el mismo proceso que ha seguido para el dual rate.
8- Recuerde que ambos, exponencial y dual-rate serán accionados por el mismo interruptor : SW2
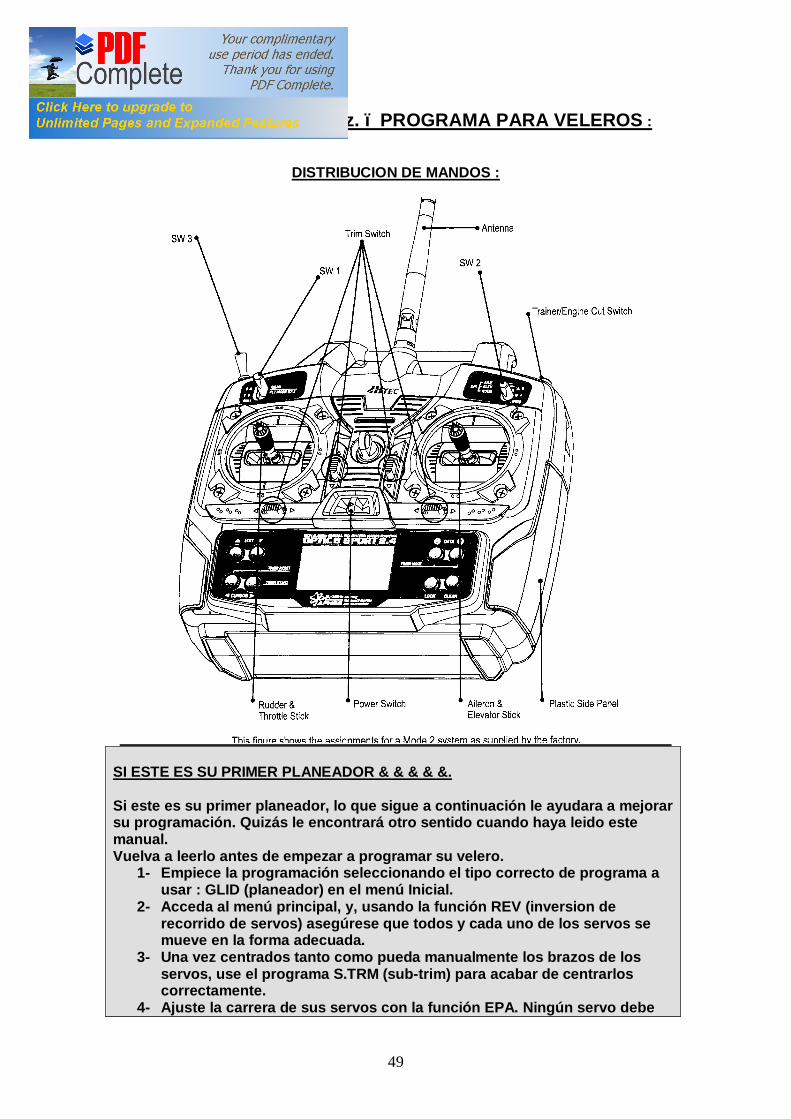
49
OPTIC 6 SPORT 2.4 GHz. – PROGRAMA PARA VELEROS :
DISTRIBUCION DE MANDOS :
SI ESTE ES SU PRIMER PLANEADOR……………. Si este es su primer planeador, lo que sigue a continuación le ayudara a mejorar su programación. Quizás le encontrará otro sentido cuando haya leido este manual. Vuelva a leerlo antes de empezar a programar su velero.
1- Empiece la programación seleccionando el tipo correcto de programa a usar : GLID (planeador) en el menú Inicial.
2- Acceda al menú principal, y, usando la función REV (inversion de recorrido de servos) asegúrese que todos y cada uno de los servos se mueve en la forma adecuada.
3- Una vez centrados tanto como pueda manualmente los brazos de los servos, use el programa S.TRM (sub-trim) para acabar de centrarlos correctamente.
4- Ajuste la carrera de sus servos con la función EPA. Ningún servo debe

50
trabajar forzado. 5- Programe un -35% de exponencial para alerones y profundidad 6- Una vez su planeador este listo para volar, póngalo en un estante y
practique con un simulador de vuelo. El tiempo pasado ante un simulador, le compensará sobradamente con el ahorro de tiempo de reparaciones que le supondra. Es mas facil resetear un programa que reconstruir un aeromodelo. Y mas barato!.
7- Listo para volar su nuevo planeador? Si es afortunado dispondrá de un compañero con mas experiencia que le ayude en los primeros pasos y en el trimado y equilibrado de su modelo durante los primeros vuelos. Vale la pena aunque deba hacer algún desplazamiento. En los clubes de aeromodelismo hallará ayuda desinteresada de aquellos que comparten afición.
ASIGNACION DE CONTROLES E INTERRUPTORES EN UN PLANEADOR :
CADENA DE PANTALLAS :

51
NOTA : Las funciones y programas que se detallan a continuación son solo las de uso exclusivo en planeadores, le rogamos vea las paginas anteriores para todas las funciones comunes a todos los programas. MENU INICIAL PARA PLANEADORES : Los pasos descritos a continuación están en el menú inicial. Aquí solo revisare-mos los que nos interesan para la programación de un planeador. Escoja el tipo de modelo que va a programar en el segundo menú de pantalla. El programa elegido, ACRO, GLID o HELI, parpadeará. Dado que queremos programar un planeador, seleccione GLIDer moviéndose entre las opciones con el CURSOR. Pulse ambos botones DATA al mismo tiempo para confirmar la selección de programa. La emisora emitirá dos jeeps en confirmación.
IMPORTANTE : En modo GLID no existe la opción ELEVONES (ELVN) por lo que, caso de querer programar un ala volante o un ala delta, deberá hacerlo en modo ACRO y no en el modo GLID.
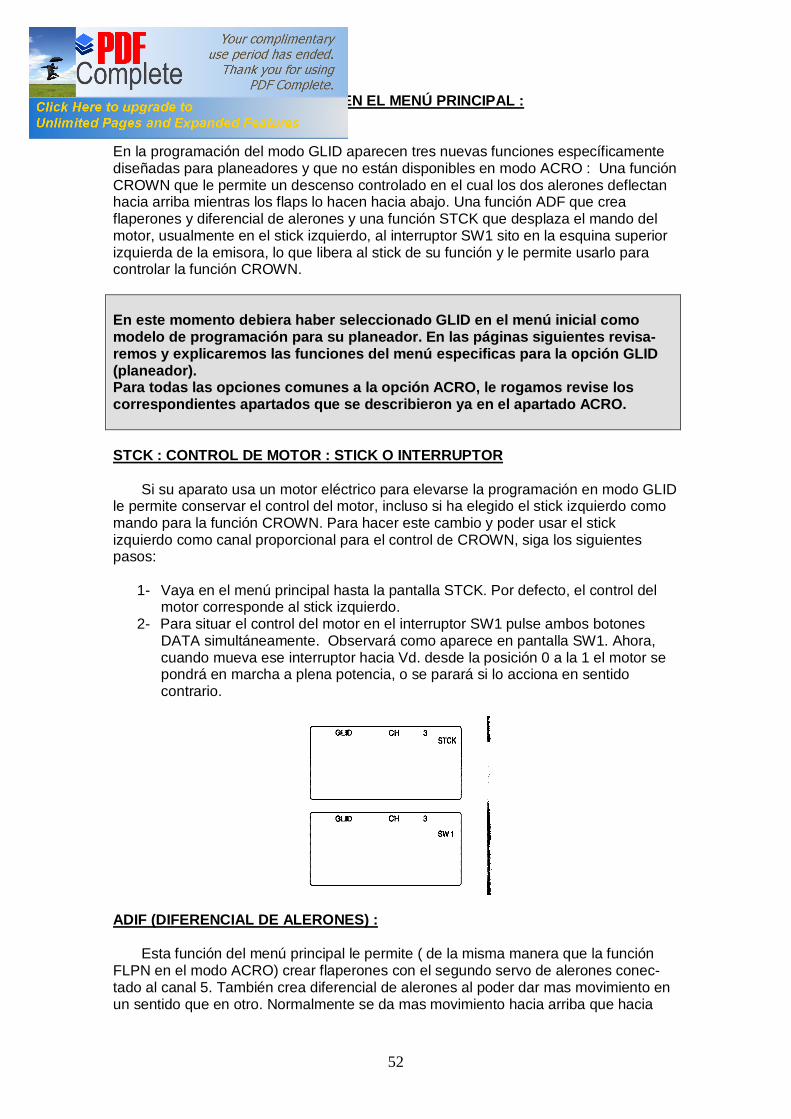
52
PROGRAMACIÓN DEL MODELO EN EL MENÚ PRINCIPAL :
En la programación del modo GLID aparecen tres nuevas funciones específicamente diseñadas para planeadores y que no están disponibles en modo ACRO : Una función CROWN que le permite un descenso controlado en el cual los dos alerones deflectan hacia arriba mientras los flaps lo hacen hacia abajo. Una función ADF que crea flaperones y diferencial de alerones y una función STCK que desplaza el mando del motor, usualmente en el stick izquierdo, al interruptor SW1 sito en la esquina superior izquierda de la emisora, lo que libera al stick de su función y le permite usarlo para controlar la función CROWN. En este momento debiera haber seleccionado GLID en el menú inicial como modelo de programación para su planeador. En las páginas siguientes revisa-remos y explicaremos las funciones del menú especificas para la opción GLID (planeador). Para todas las opciones comunes a la opción ACRO, le rogamos revise los correspondientes apartados que se describieron ya en el apartado ACRO. STCK : CONTROL DE MOTOR : STICK O INTERRUPTOR Si su aparato usa un motor eléctrico para elevarse la programación en modo GLID le permite conservar el control del motor, incluso si ha elegido el stick izquierdo como mando para la función CROWN. Para hacer este cambio y poder usar el stick izquierdo como canal proporcional para el control de CROWN, siga los siguientes pasos:
1- Vaya en el menú principal hasta la pantalla STCK. Por defecto, el control del motor corresponde al stick izquierdo.
2- Para situar el control del motor en el interruptor SW1 pulse ambos botones DATA simultáneamente. Observará como aparece en pantalla SW1. Ahora, cuando mueva ese interruptor hacia Vd. desde la posición 0 a la 1 el motor se pondrá en marcha a plena potencia, o se parará si lo acciona en sentido contrario.
ADIF (DIFERENCIAL DE ALERONES) : Esta función del menú principal le permite ( de la misma manera que la función FLPN en el modo ACRO) crear flaperones con el segundo servo de alerones conec-tado al canal 5. También crea diferencial de alerones al poder dar mas movimiento en un sentido que en otro. Normalmente se da mas movimiento hacia arriba que hacia

53
abajo. Esto es sumamente importante en los planeadores ya que reduce la resistencia parásita inducida en los giros.
NOTA : Debe activar este programa para crear flaperones antes de poder crear una mezcla elevador/flaps, Camber o Crown.
ACTIVANDO FLAPERONES : Usando el botón EDIT derecho vaya hasta la pantalla ADIF y active el programa de diferencial pulsando ambos botones DATA simultáneamente. Los símbolos MAS y CH1 deberían parpadear y los símbolos CH5 y SLV estar fijos. Esto indica que el canal master es el 1 y el 5 es esclavo del master. Los valores pre-programados para ambos lados del stick corresponden al 100% del movimiento de ambos servos. Al accionar el stick hacia la derecha, el alerón derecho deberia subir, y el izquierdo bajar. Si activa la función CROW y/o la mezcla ELEVADOR/FLAPS, los alerones moverán al unísono como flaperones.
CREANDO DIFERENCIAL DE ALERONES : Ahora vamos a reducir la carrera del servo que baja aproximadamente a la mitad de la carrera del que sube.
1- Cerciónese que MAS y 1 parpadean. Lleve el stick hacia la izquierda , mantengalo ahí y reduzca el valor del movimiento usando la tecla –DATA hasta el 50%.
2- Use el CURSOR derecho para cambiar a SLV a parpadeando y reduzca el valor hasta el 50, después de llevar el stick al lado derecho. Ahora ya tiene sus alerones con un diferencial del 50% programado.
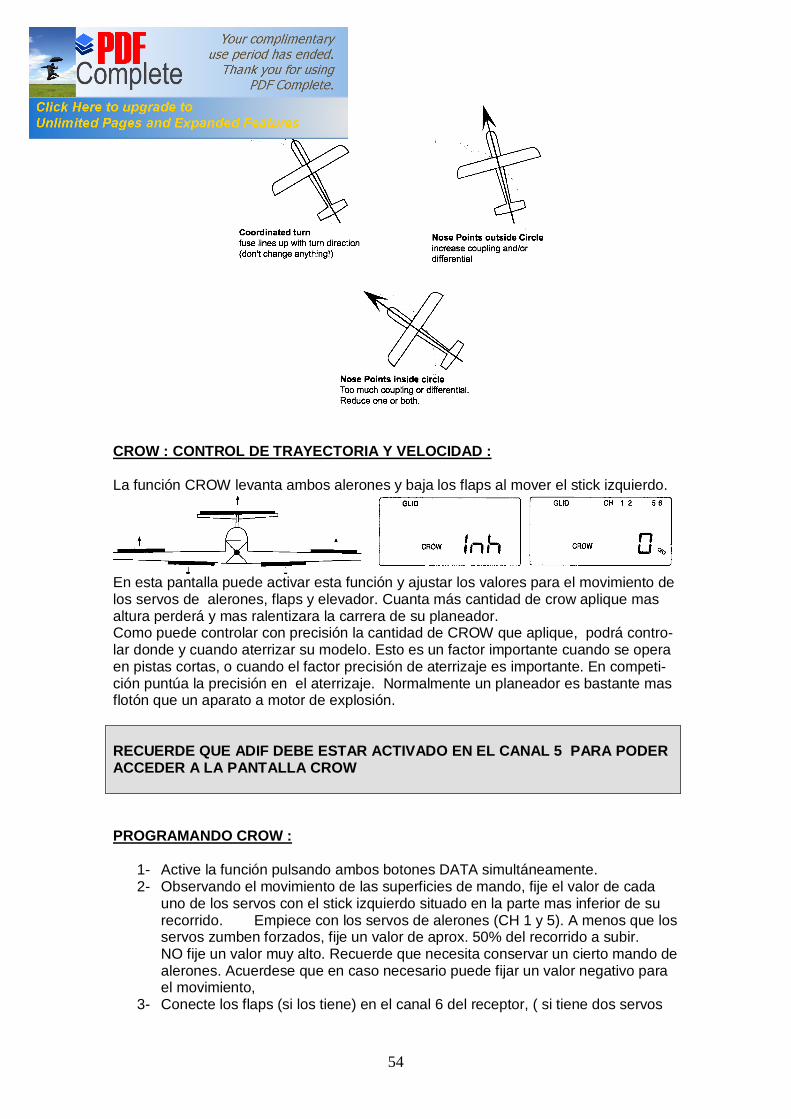
54
CROW : CONTROL DE TRAYECTORIA Y VELOCIDAD : La función CROW levanta ambos alerones y baja los flaps al mover el stick izquierdo.
En esta pantalla puede activar esta función y ajustar los valores para el movimiento de los servos de alerones, flaps y elevador. Cuanta más cantidad de crow aplique mas altura perderá y mas ralentizara la carrera de su planeador. Como puede controlar con precisión la cantidad de CROW que aplique, podrá contro-lar donde y cuando aterrizar su modelo. Esto es un factor importante cuando se opera en pistas cortas, o cuando el factor precisión de aterrizaje es importante. En competi-ción puntúa la precisión en el aterrizaje. Normalmente un planeador es bastante mas flotón que un aparato a motor de explosión. RECUERDE QUE ADIF DEBE ESTAR ACTIVADO EN EL CANAL 5 PARA PODER ACCEDER A LA PANTALLA CROW PROGRAMANDO CROW :
1- Active la función pulsando ambos botones DATA simultáneamente. 2- Observando el movimiento de las superficies de mando, fije el valor de cada
uno de los servos con el stick izquierdo situado en la parte mas inferior de su recorrido. Empiece con los servos de alerones (CH 1 y 5). A menos que los servos zumben forzados, fije un valor de aprox. 50% del recorrido a subir.NO fije un valor muy alto. Recuerde que necesita conservar un cierto mando de alerones. Acuerdese que en caso necesario puede fijar un valor negativo para el movimiento,
3- Conecte los flaps (si los tiene) en el canal 6 del receptor, ( si tiene dos servos
55
de flaps, conectelos con un cable en “Y”) ajuste un valor de movimiento del 75%.
4- Finalmente, desplace el cursor al canal 2 y ajuste el valor del elevador ligeramente a bajar para compensar. Un 15% seria un buen punto de partida. Evidentemente, no hay nada como la propia experiencia y la pruebas en vuelo para ajustar los valores que realmente necesite nuestro modelo.
NOTA DE SEGURIDAD : Cuando pruebe la respuesta del modelo a esos ajustes en vuelo, hagalo a una altura de seguridad razonable, que le permita desconec-tarlos y recuperar el control de su modelo en caso de pérdida de control. Nunca haga pruebas por debajo de los 60 metros de altura.
CAMB (CAMBIOS EN LA CURVATURA DEL PERFIL ALAR) :
Aunque la función CAMB también aparece en el menú ACRO, el uso de esta función varía significativamente de planeador a avión motorizado. Vea las instrucciones que facilitamos seguidamente para un uso más efectivo de esta función en su planeador. Una buena comprensión de los modos de vuelo le ayudará a programar mejor la función CAMBer.
Los planeadores modernos dotados de perfiles finos pueden cambiar su comporta-miento cambiando su forma bien subiendo el borde de fuga o bajandolo. Estas mo-dificaciones del perfil combinados con ligeros cambios en la profundidad son cru-ciales para optimizar las prestaciones del modelo para una diversidad de condi-ciones de vuelo o tareas. Su OPTIC 6 SPORT le ofrece una selección de hasta CUATRO modos de vuelo di-ferentes en los cuales programar diversas variaciones de posición para alerones, flaps y profundidad asi como dual-rates y valores de mando exponencial. Estos modos de vuelo son activados por los interruptores SW3 y SW1. Un típico ejemplo de programación para mejorar las prestaciones de un velero lanzado a mano, consistiría en los siguientes modos de vuelo (todos ellos asignados al interruptor SW3) :
- LANZAMIENTO : En este modo de vuelo, situaríamos el interruptor SW3 en su posición mas hacia nosotros. Los flaps y los alerones se situarían en una posición ligeramente elevada para que el perfil se adecuara a un vuelo a alta velocidad, con el elevador a subir para que el modelo subiera en vertical durante los primeros 5 segundos de vuelo (aproximadamente).
- CRUCERO : Al llevar el interruptor SW3 a su posición intermedia los flaps y alerones regresan a su posición normal y el elevador a una posición ligeramente por debajo de su grado de incidencia normal. Esto permite al velero desplazarse rápidamente entre térmicas y a través de áreas de hundimiento.
- TERMAL : Con el interruptor SW3 en su posición mas exterior, los flaps y alerones bajaran unos 2 cm. Y el elevador se situará en una posición ligeramente por encima de su incidencia normal. Esta es la manera habitual de volar cuando cree que ha alcanzado una térmica. El planeador esta trimado para su menor tasa de hundimiento y estará

56
volando ligeramente por encima de la velocidad de perdida para permitirle a Vd. giros cerrados manteniendo el aparato justo en el eje de la térmica.
PROGRAMANDO MODOS DE VUELO CON CAMB Y COMPENSACIÓN DE PROFUNDIDAD :
1- El primer paso es abandonar esta pantalla e ir a la pantalla de modos de vuelo
(FLT C) para programar la función CAMB y la compensación de profundidad para cada una de las posiciones del interruptor SW3 (sito en la parte superior derecha de la emisora). Use el botón EDIT derecho para situarse en esa pantalla (FLT C)
2- Active ahora lo que será en modo “LANZAMIENTO” situando la palanca del interruptor SW3 hacia Vd. y pulsando ambos botones DATA el símbolo INH cambiará a ON y en la parte central inferior de la pantalla aparecerá ST2 en blanco dentro de un recuadro negro. Lleve la palanca del interruptor hacia atrás y active ST1 de la misma manera. Esta posición será la del modo TERMAL. La posición central será, por defecto, la posición NORMAL o de CRUCERO. Evidentemente, Vd. puede alterar esa distribución fijando la que mas le convenga para cada una de las posiciones del interruptor.
3- Vuelva ahora a la pantalla CAMB con uno de los botones EDIT y mueva la palanca del interruptor SW3 a su posición mas adelantada, posición de lanza-miento. Ponga en marcha el receptor de su modelo, para poder observar en las superficies de mando las modificaciones realizadas.
4- Con el canal 1 parpadeando cambie el valor de los recorridos de los servos usando el botón DATA hasta que el alerón derecho se levante ligeramente.
SIGA LAS INSTRUCCIONES DEL FABRICANTE DE SU PLANEADOR SOBRE LOS VALORES RECOMENDADOS PARA LOS PERFILES DE SU APARATO PARTICULAR.
5- Usando el CURSOR derecho cambie a CH2 y ajuste el recorrido del elevador hacia arriba unos pocos grados. Pase al CH6 para repetir la operación con el alerón derecho
6- Si su borde de salida tiene flaps, vaya al CH5 con el CURSOR y cambie su valor para que se alinee con los alerones.
7- Mueva ahora el interruptor SW3 a su posición central y repita el mismo proceso para dar a las superficies de control el valor apropiado para la posición CRUCERO.
8- Finalmente, lleve el interruptor hacia atrás para el vuelo en TERMICA y repita el proceso alli.
9- Cuando haya terminado, regrese al menú principal. Apague el receptor y después la emisora.
10- Como siempre, revise los valores de estos ajustes para optimizarlos según los resultados obtenidos en las pruebas en vuelo.
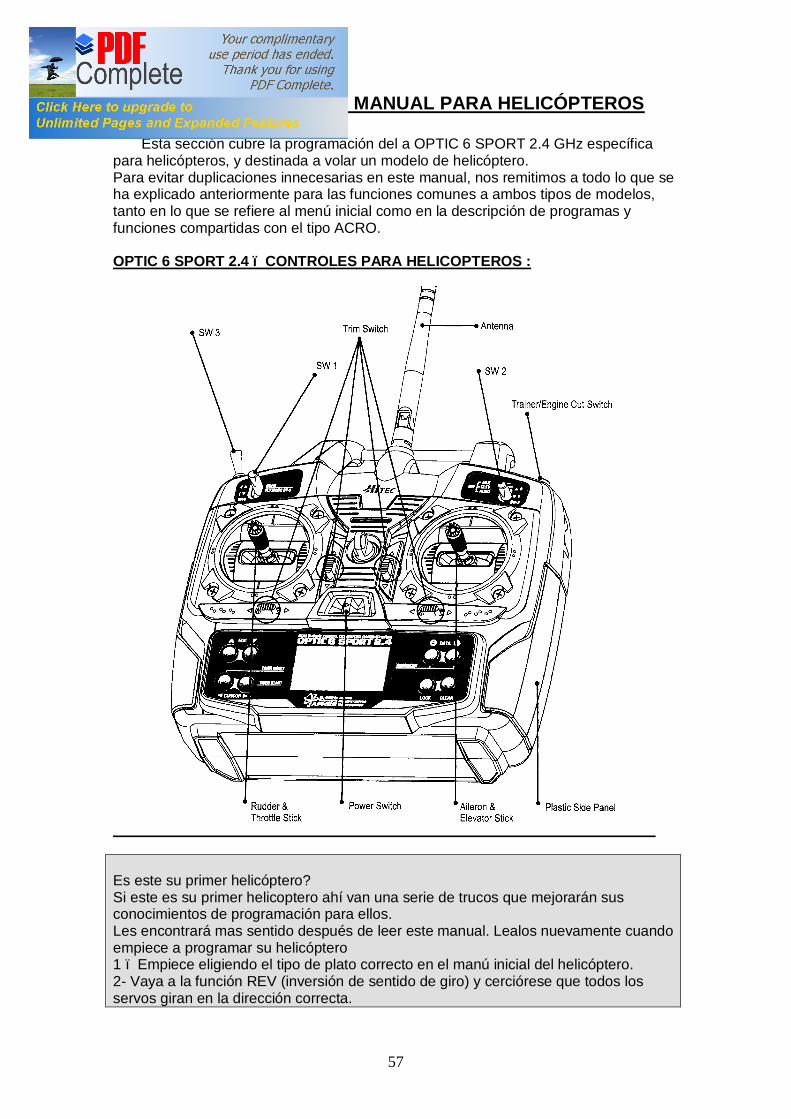
57
OPTIC 6 SPORT 2.4 GHz. – MANUAL PARA HELICÓPTEROS Esta sección cubre la programación del a OPTIC 6 SPORT 2.4 GHz específica para helicópteros, y destinada a volar un modelo de helicóptero. Para evitar duplicaciones innecesarias en este manual, nos remitimos a todo lo que se ha explicado anteriormente para las funciones comunes a ambos tipos de modelos, tanto en lo que se refiere al menú inicial como en la descripción de programas y funciones compartidas con el tipo ACRO. OPTIC 6 SPORT 2.4 – CONTROLES PARA HELICOPTEROS :
Es este su primer helicóptero? Si este es su primer helicoptero ahí van una serie de trucos que mejorarán sus conocimientos de programación para ellos. Les encontrará mas sentido después de leer este manual. Lealos nuevamente cuando empiece a programar su helicóptero 1 – Empiece eligiendo el tipo de plato correcto en el manú inicial del helicóptero. 2- Vaya a la función REV (inversión de sentido de giro) y cerciórese que todos los servos giran en la dirección correcta.

58
3- Una vez centrados manualmente todos los brazos de los servos, use la función S.TRM para acabar de centrarlos. 4- Ajuste la carrera de sus servos con la función EPA. 5 – Relea cuidadosamente la sección del manual donde se habla de curvas de motor y curvas de paso y programe las curvas para modo NOR. No se preocupe de control motor, modos de vuelo ni autorotaciones hasta que no pueda hacer estacionario y volar correctamente en modo NOR. 6 – Trabaje en los ajustes del giróscopo. Aprenda como interactúa su giróscopo con las diferentes emisoras en el manual de su giróscopo. 7 – Programe un exponencial del -35% para Roll (CH1) y Pitch (CH2). 8- Cuando tenga el helicóptero listo para volar, póngalo en una estantería y practique con el simulador de vuelo de su ordenador. Tómese tiempo para romper helicópteros virtuales en el simulador, con ello ahorrará mucho tiempo y dinero en reparaciones y recambios de su helicóptero real. 9 – Cree que esta listo? Si es afortunado tendrá algún amigo o conocido con habilidad y experiencia en el manejo de helicópteros R.C. que le ayudará a verificar su aparato y durante las primeros ajustes y pruebas en vuelo. Esta opción es altamente recomendable incluso si debe efectuar algún desplazamiento para poder contar con esa ayuda. Si no puede disponer de ella, empiece lentamente, use estabilizadores bajo en tren de aterrizaje de su modelo y aprenda estacionario antes de intentar la traslación en vuelo hacia delante.
REVISION DEL MENU INICIAL PARA PROGRAMACION DE HELICOPTEROS : Los dos apartados siguientes están dentro del “Menú Inicial” tal como se describe en las paginas 24 a 26, ahora las revisaremos : SELECCIÓN DE TIPO DE MODELO : En la segunda pantalla del menú inicial el tipo de modelo a programar las palabras ACRO, GLID o HELI parpadearán. Ya que queremos programar un HELIcóptero seleccionaremos HELI buscando con uno de los CURSOR. Una vez seleccionado, pulsaremos ambos botones DATA simultáneamente para confirmar la selección. La emisora emitirá dos “Bips” como confirmación.
SELECCIÓN DE TIPO DE PLATO : Si ha seleccionado HELI como tipo de aparato, esta pantalla le permitirá elegir entre NOR ( tipo normal de mecánica con mandos de control del plato a 90º) o plato a 120º pulsando uno de los botones CURSOR. Consulte el manual de su modelo para saber que tipo de plato usa el suyo.

59
NOR suele ser el plato standard en el que cada uno de los servos controla una función, uno el colectivo, otro el elevador y otro alerones. El plato a 120º es un plato controlado por 3 servos que necesitan mezclas especiales para controlar los movimientos de colectivo, alerones y elevador. También suele ser llamado como SN-3. PROGRAMACION DEL MODELO : Para ajustar la OPTIC 6 SPORT a su modelo en particular, necesita programar su modelo a través del menú. En este menú podrá programar funciones especifi-cas de control de mandos, y el valor de los recorridos de los mismos para el modelo particular que ha elegido en el menú inicial. Sigamos adelante, encienda su emisora y ya esta en la pantalla operativa. En la parte superior izquierda de la pantalla debe poner “HELI” y a la derecha, unas cifras grandes nos dirán la tensión de la materia de emisión (7,2 v, por ejemplo) y a la derecha de este número, otro, mas pequeño, indicará sobre que memoria de la emisora estamos trabajando.. En la parte central inferior, habrá un cajón negro con letras blancas con las siglas NOR en blanco. Esto indica que el sistema esta en modo de vuelo NORmal, lo que, en helicópteros, indica que el aparato está operando con las curvas normales. Mas adelante le mostraremos como activar los distintos modos de vuelo dispo-nibles y en este recuadro aparecerá el que esté usando en este momento.
NOTA : Si Vd. ya habia programado en el modo ACRO se dará cuenta de que en la programación de helicópteros aparecen CINCO funciones nuevas que no existen en modo ACRO. Curva de Motor, Curva de Pitch, Ganancia de Giroscópio, Mezclador de revoluciones y Bloqueo de Motor. Cada una de estas funciones sera debidamente explicada en los correspondientes apartados del menú HELI.
Pulse ahora ambos botones EDIT al mismo tiempo. A continuación le presentamos las funciones que aparecen en el menú en el mismo orden en que aparecen en pantalla cuando se mueve a través del menú con la tecla EDIT :

60
Esta sección solo describe las funciones exclusivas de los helicópteros. La descripción de otras funciones como ajuste de carrera de servos, dual rates,exponenciales.etc etc. Las hallará en la sección ACRO de este manual.
Fundamentalmente hay dos clases de helicópteros : Los de paso fijo y los de paso colectivo. Los helicópteros de paso fijo son mas simples de operar y tienen menos piezas móviles ya que el motor controla la velocidad de las palas del aparato que son fijas ( no varían el ángulo de ataque). Para estos aparatos de paso fijo solo deberá programar la curva del motor, pero no la de paso, por carecer de control sobre el mismo. Los demás, de paso colectivo o variable, mas comunes en la actualidad, usan una mezcla para combinar las revoluciones del motor con el ángulo de ataque de las palas del rotor. Ambas curvas, la del motor y la del paso se ajustan para mejorar al máximo las prestaciones de cualquier helicóptero de paso colectivo.
TIPOS DE MOTOR MAS COMUNES : GLOW Y ELECTRICOS :
Hay algunas sutiles diferencias en los métodos de ajuste para ambos tipos de motores.
Si su helicóptero esta motorizado con un motor glow : 1- Un servo conectado al CH3 del receptor controla la posición del barrilete del
motor. 2- Los Helicópteros provistos de motores glow deben llevar una batería para
alimentar los servos, el receptor y el giroscopio. Si su helicóptero esta motorizado con un motor eléctrico…..
1- Un variador proporcional se conecta al CH3 del receptor para controlar las

61
RPM del motor. Este variador de velocidad puede necesitar ser programado, por lo que le rogamos lea atentamente las instrucciones del fabricante del mismo y las siga cuidadosamente.
2- En los helicópteros eléctricos de pequeño tamaño la batería del motor proporciona también electricidad, a través del variador para los servos, receptor y giróscopo mediante un B.E.C. ( Circuito eliminador de bateria ). Los aparatos mayores usan una batería aparte para alimentar estos elementos.
T.CV (CURVA DE MOTOR) : Las curvas de motor y de paso están gobernadas por el mismo elemento : el stick vertical izquierdo. La posición de este stick controla la velocidad y el ángulo de ataque de las palas del rotor y se pueden ajustar en una curva de hasta 5 puntos. Estas curvas son, realmente, líneas rectas que enlazan los cinco puntos programa-bles y se definen asignando porcentajes de movimiento a estas cinco posiciones del stick izquierdo :
Posición mas baja de la palanca : punto nº 1 ¼ de recorrido : punto nº 2
½ recorrido : punto nº 3 ¾ de recorrido : punto nº 4
Posición mas alta de la palanca : punto nº 5
Con los puntos definidos como antecede, el servo moverá un 50% de su paso en su parte baja, y otro 50% en su parte alta :
Puede obtener una respuesta lineal ajustando el recorrido del servo como muestra el recuadro izquierdo, o programar un recorrido mas suave para tener menor sensi-bilidad en el mando cuando esta realizando ejercicios en estacionario, como aparece en el recuadro de la derecha. PROGRAMANDO LA CURVA DE MOTOR : 1- Pulse uno de los botones EDIT hasta que aparezca la ventana T.CV. El ajuste
por defecto es del 100% para obtener una curva lineal : una línea desde el 0 hasta el 100% con un valor del 50% en el centro del recorrido.

62
2- Verifique que esta usando el modo de vuelo adecuado moviendo el interruptor SW1 a su posición NORmal. Recuerde que puede fijar curvas de motor y paso diferentes para cada modo de vuelo excepto para la posición SW3 que tiene bloqueo de motor.
3- Empiece programando el punto 1, que estará parpadeando, esta es la posición de Valenti, por lo que se le asigna por defecto un valor del 0% pulse +DATA para incrementarlo. Un 15 o 20% sería un buen valor de salida.
4- Cuando haya acabado con el punto 1 cambie al 2 con el CURSOR derecho, el numero 2 parpadeara, lo que indicará que está listo para que se le asigne valor. Advierta que la función esta desactivada por defecto, si no la habilita, se establecerá una línea recta entre el punto 1 y el 3. Si quiere modificarlo, pulse CLEAR y asígnele el valor que desee pulsando +DATA.
5- Repita este proceso con los puntos 3, 4 y 5 pulsando el CURSOR derecho y modificando el valor con las teclas +/- DATA.
6- Cuando haya completado los ajustes para la curva del motor para el primer modo de vuelo (NOR) vaya a la sección Curva de Paso (PITCH) y ajuste la curva de paso que desee para el modo de vuelo NOR.
Programar curvas de motor para otros modos de vuelo : Cuando domine su helicóptero en modo NOR puede empezar a considerar la posibilidad de programar curvas de motor para realizar acrobacias o maniobras en 3D. Usando los ajustes NOR como base para otros modos de vuelo al alcance de pilotos experimentados. P.CV ( CURVA DE PASO) : De la misma manera que en la curva de motor, descrita anteriormente, la curva de paso de rotor (pitch) va ligada a la posición del stick izquierdo. Las instrucciones para su ajuste son las mismas que facilitabamos para la del motor, exceptuando que a diferencia de la curva motor, que no puede ser programada en ST3, si puede programar una curva de pitch en este modo de vuelo. Si es Vd. un principiante, de momento no se preocupe del modo HOLD. Puede obtener una respuesta lineal programando los 5 puntos de ajuste de la curva tal como se muestran en el grafico izquierdo de la curva de motor. Si desea otros ajustes, puede programarlos a su gusto. También puede programar la curva de manera que haga los controles mas suaves para el vuelo estacionario. CREANDO UNA CURVA DE PASO :
1- Pulse uno de los botones EDIT hasta que aparezca la ventana P.CV . Por defecto es una curva lineal con el 0% en la parte inferior del recorrido del stick, el 50% en la mitad de su recorrido y el 100% en la superior.
2- Asegúrese de que esta volando en modo NOR moviendo el interruptor SW3 y observando la pantalla donde, en la parte central inferior, dentro de un recuadro negro, debe aparecer NOR en blanco. Recuerde que puede ajustar valores independientes para cada punto de la curva.

63
3- Empecemos por el punto 1, que parpadeara, esta será la posición de reposo, por defecto tiene asignado un valor del 0%. Asígnele valor con los botones +/- DATA.
4- Cuando haya terminado con el punto 1, vaya al punto siguiente con el CURSOR derecho. La posición 2 parpadeara, lo que indicará que estamos trabajando en ella, Por defecto, esta inhabilitada. Si la deja asi, creará una linea que unirá los puntos 1 y 3, si no, puede darle un valor usando los botones +/- DATA.
5- Repita este procedimiento para los puntos 3,4 y 5 pulsando el boton CURSOR DERECHO y ajustando el valor deseado pulsando CLEAR y asignando valor con +/- DATA
6- Cuando haya completado el proceso para el modo NOR haga pruebas en vuelo. Corrija sus ajustes si fuera necesario, cuando este satisfecho con ellos úselos como base para otros modos de vuelo.
7- Situe los interruptores para programar un nuevo modo de vuelo, verifique que aparezca en pantalla, y programe 5 valores nuevos para los 5 puntos de la curva, tal como habia hecho para el modo NOR.
DONDE ESTAN LOS CONTROLES DE PASO Y MOTOR PARA ESTACIONARIO? Pilotos experimentados pueden estar buscando los controles de estacionario en la OPTIC 6 SPORT 2.4. No los busque más, no los hay!! Los ajustes finos de paso y motor para estacionario se hacen ajustando el punto 3 de las curvas del paso y de motor. GYRO GAIN (GANANCIA DEL GIROSCOPO) : La ganancia del giróscopo se usa para controlar automáticamente la respuesta del giróscopo para 4 modos diferentes de vuelo. Puede ser ajustado con valores diferen-tes para cada uno de los modos ( NOR, ST1, ST2 Y ST3) permitiendole obtener la respuesta que necesita del giróscopo para cada circunstancia. El giróscopo debe ser conectado al canal 5 del receptor y NO puede ser controlado por ningún interruptor. Hay muchos fabricantes y modelos de giróscopo, no todos se ajustan de la misma ma-nera . Por favor, lea cuidadosa y atentamente las instrucciones del manual de su girós-copo para entender la manera de proceder para su instalación y ajuste. PROGRAMANDO GIROSCOPO :
1- Pulse uno de los botones EDIT repetidamente hasta que aparezca en pantalla el menú GYRO. Por defecto aparece como inhabilitado. Pulse uno de los botones CURSOR para activarlo. Una vez activado asigne un valor del 50% para cada uno de los cuatro modos de vuelo.
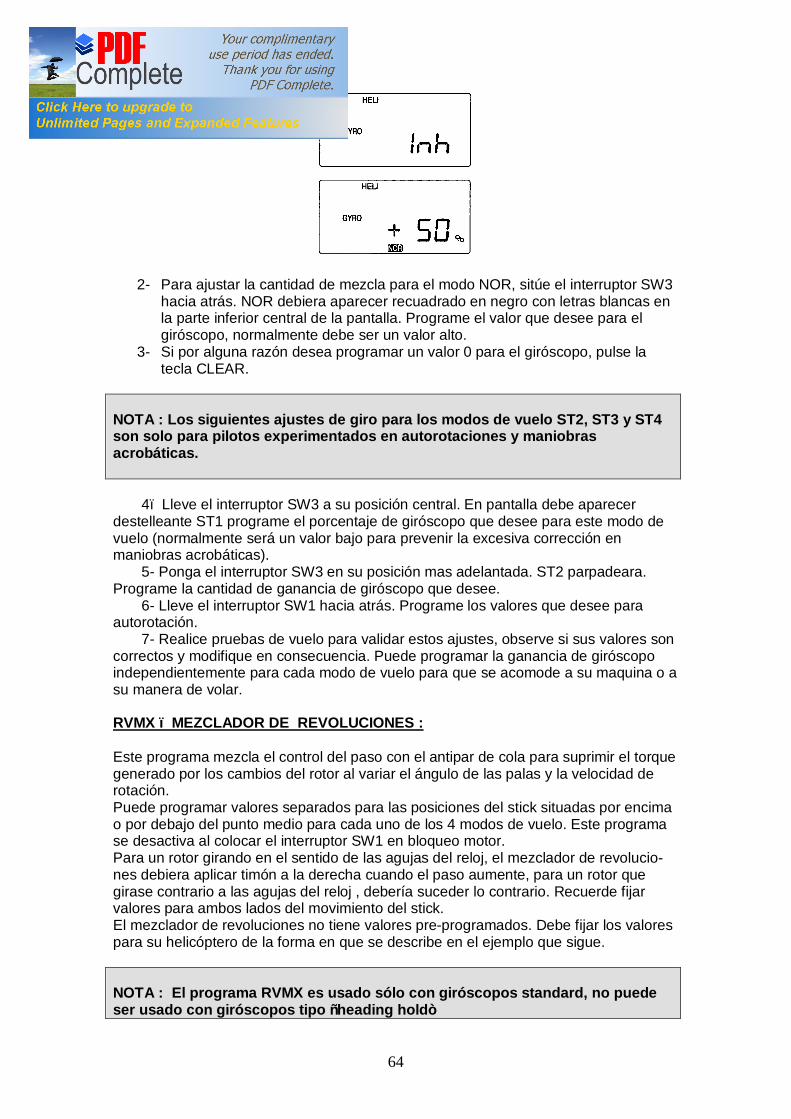
64
2- Para ajustar la cantidad de mezcla para el modo NOR, sitúe el interruptor SW3 hacia atrás. NOR debiera aparecer recuadrado en negro con letras blancas en la parte inferior central de la pantalla. Programe el valor que desee para el giróscopo, normalmente debe ser un valor alto.
3- Si por alguna razón desea programar un valor 0 para el giróscopo, pulse la tecla CLEAR.
NOTA : Los siguientes ajustes de giro para los modos de vuelo ST2, ST3 y ST4 son solo para pilotos experimentados en autorotaciones y maniobras acrobáticas. 4– Lleve el interruptor SW3 a su posición central. En pantalla debe aparecer destelleante ST1 programe el porcentaje de giróscopo que desee para este modo de vuelo (normalmente será un valor bajo para prevenir la excesiva corrección en maniobras acrobáticas). 5- Ponga el interruptor SW3 en su posición mas adelantada. ST2 parpadeara. Programe la cantidad de ganancia de giróscopo que desee. 6- Lleve el interruptor SW1 hacia atrás. Programe los valores que desee para autorotación. 7- Realice pruebas de vuelo para validar estos ajustes, observe si sus valores son correctos y modifique en consecuencia. Puede programar la ganancia de giróscopo independientemente para cada modo de vuelo para que se acomode a su maquina o a su manera de volar. RVMX – MEZCLADOR DE REVOLUCIONES : Este programa mezcla el control del paso con el antipar de cola para suprimir el torque generado por los cambios del rotor al variar el ángulo de las palas y la velocidad de rotación. Puede programar valores separados para las posiciones del stick situadas por encima o por debajo del punto medio para cada uno de los 4 modos de vuelo. Este programa se desactiva al colocar el interruptor SW1 en bloqueo motor. Para un rotor girando en el sentido de las agujas del reloj, el mezclador de revolucio-nes debiera aplicar timón a la derecha cuando el paso aumente, para un rotor que girase contrario a las agujas del reloj , debería suceder lo contrario. Recuerde fijar valores para ambos lados del movimiento del stick. El mezclador de revoluciones no tiene valores pre-programados. Debe fijar los valores para su helicóptero de la forma en que se describe en el ejemplo que sigue. NOTA : El programa RVMX es usado sólo con giróscopos standard, no puede ser usado con giróscopos tipo “heading hold”

65
1- Busque la pantalla RVMX pulsando uno de los botones EDIT repetidamente. El programa está activado por defecto, con un valor del 0%. Coloque el stick motor en posición ralentí.
2- Pulse el botón +DATA. Esto aaumentará el valor de la mezcla RVMX para las posiciones bajas de la palanca motor. Puede fijar cualquier valor entre el 0 y el 100% para este lado del recorrido. Si desea volver al valor por defecto, el 0% simplemente pulse CLEAR.
3- Lleve el stick del motor a una posición por encima de medio gas y cambie el valor de la mezcla a su gusto.
4- Verifique ahora que la dirección responde en la dirección correcta y en la cantidad requerida al dar motor.
5- Ajuste los valores de la mezcla RVMX para otros modos de vuelo (ST1, ST2) moviendo el interruptor SW3 y repitiendo el proceso.
HOLD (THROTTLE HOLD) : BLOQUEO MOTOR : La función HOLD lleva al servo de motor a una posición pre-programada, cercana al ralentí, y la libera del control del stick de gas. Suele usarse esta función durante la autorotación y se activa con el interruptor SW1 sito en la parte superior izquierda de la emisora. Para esta mezcla se puede ajustar un valor entre el -25 y el +100% para una posición del stick cercana al ralentí. Cuando se activa esta mezcla, se desactiva automáticamente la mezcla RVMX.
1- Pulse uno de los botones EDIT hasta que el menú HOLD aparezca. La función, por defecto, esta desactivada.
2- Para activarla pulse ambos botones DATA simultáneamente. Como confirmación de la activación, INH desaparecerá y aparecerá un 0% en pantalla.
3- Ahora puede fijar el valor que desee para la posición bloqueo de motor con los botones +/- DATA. Si desea volver a los valores iniciales, simplemente pulse CLEAR.
4- Verifique que el motor vaya a la posición deseada accionando el interruptor SW1 a uno y otro lado. Ajuste los valores si fuera necesario. Cerciónese de elegir un valor que asegure que el motor no se pare accidentalmente, pero lo suficientemente bajo como para que desembrague, quedando el rotor en giro libre.
SWAH (PROGRAMACION DE PLATO CON SERVOS A 120º ) : Este programa esta concebido para ser usado en aparatos cuyo paso sea controlado por mas de un servo a la vez. Los manuales de los fabricantes se refieren a el a veces como CCPM ( Mezcla de pasos cíclico y colectivo). Su emisora OPTIC 6 SPORT le permite controlar este tipo de platos.

66
Consulte el manual de su modelo para conocer las instrucciones de ajuste del plato que equipa. El menú SWAH se usa para controlar la respuesta al mando de los tres servos que gobiernan el colectivo. NO DEBE usarse para invertir el sentido de giro de un servo ni para alterar su recorrido, haga estas modificaciones en los menús REV o EPA respec-tivamente. Cuando mueve el stick derecho, los tres servos que gobiernan el plato deben moverse en la misma dirección y con la misma cantidad de recorrido sin que el plato se desequilibre. Si el plato se inclina a un lado cuando mueve el colectivo o uno o mas servos se mueven en sentido erróneo o con recorridos desiguales, debe ser ajustado en el menú SWAH. Si el plato se inclina hacia abajo cuando debiera hacerlo hacia arriba o viceversa cambie el signo de los tres servos de + a – o viceversa.
NOR SWASH 120º SWASH SIN MENU SWAH CH1 +70%, CH2 70%. CH 6 70%
Advierta que no hay menú SWAH si ha seleccionado un plato NOR, pero en cambio, si ha elegido en el menú inicial la opción de plato a 120º, si lo hay. Los que aparecen en la tabla son los valores aplicados por defecto por el programa de la emisora. PROGRAMACION DEL PLATO A 120º :
1- Consulte las instrucciones de su modelo sobre los ajustes del plato. Si necesita tres servos para accionar un plato a 120º, o le habla de un plato tipo CCPM, elija la opción SWASH 120º en el menú inicial de su modelo.
2- Con los servos instalados y la emisora y el receptor en marcha, mueva el stick del motor/colectivo arriba y abajo. El plato debe mover arriba y abajo sin rotaciones ni inclinaciones.
3- Mueva el alabeo derecha e izquierda. El plato debe inclinarse a derecha e izquierda sin inclinarse ni levantarse. Mueva el elevador el plato debe inclinarse hacia delante y hacia atrás, sin rotaciones.
4- Si hay rotaciones al mover el colectivo o se mueve el plato arriba o abajo al mover los alerones, necesita ajustarlo en el menú SWAH.
5- Si los servos no responden en la misma dirección para el colectivo o en direcciones opuestas para alerones y elevador, necesitará invertir algún reco-rrido de servos en el menú REV. Quizás le lleve unos cuantos intentos tipo prueba/error probando diferentes combinaciones de recorridos normal o inverso de los servos para hallar la que responda perfectamente a sus necesidades. No se preocupe de la dirección en que respondan, solo de que lo hagan de manera igual tanto para el colectivo como para alerones y elevador.
6- Vaya a la pantalla SWAH pulsando repetidamente uno de los botones EDIT hasta que la palabra SWAH aparezca en pantalla. Esta función se activa automáticamente al seleccionar la opción 120º en el menú inicial.
7- Si todos los servos suben el plato cuando aumentamos colectivo, vaya al paso siguiente. Si lo bajan, pulse el CURSOR DERECHO dos veces para entrar en el menú de ajustes del colectivo. (la flecha aparece sobre el número 6). Pulse
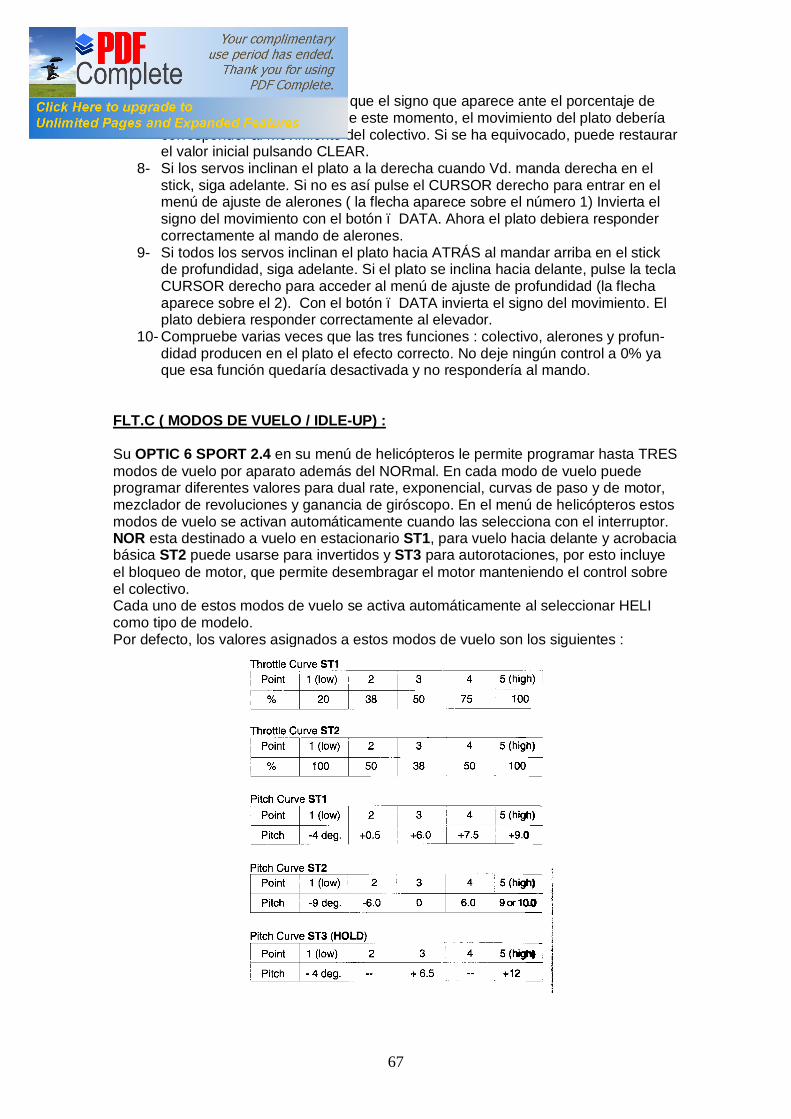
67
ahora el botón –DATA hasta que el signo que aparece ante el porcentaje de movimiento se invierta. Desde este momento, el movimiento del plato debería corresponder al movimiento del colectivo. Si se ha equivocado, puede restaurar el valor inicial pulsando CLEAR.
8- Si los servos inclinan el plato a la derecha cuando Vd. manda derecha en el stick, siga adelante. Si no es así pulse el CURSOR derecho para entrar en el menú de ajuste de alerones ( la flecha aparece sobre el número 1) Invierta el signo del movimiento con el botón – DATA. Ahora el plato debiera responder correctamente al mando de alerones.
9- Si todos los servos inclinan el plato hacia ATRÁS al mandar arriba en el stick de profundidad, siga adelante. Si el plato se inclina hacia delante, pulse la tecla CURSOR derecho para acceder al menú de ajuste de profundidad (la flecha aparece sobre el 2). Con el botón – DATA invierta el signo del movimiento. El plato debiera responder correctamente al elevador.
10- Compruebe varias veces que las tres funciones : colectivo, alerones y profun-didad producen en el plato el efecto correcto. No deje ningún control a 0% ya que esa función quedaría desactivada y no respondería al mando.
FLT.C ( MODOS DE VUELO / IDLE-UP) : Su OPTIC 6 SPORT 2.4 en su menú de helicópteros le permite programar hasta TRES modos de vuelo por aparato además del NORmal. En cada modo de vuelo puede programar diferentes valores para dual rate, exponencial, curvas de paso y de motor, mezclador de revoluciones y ganancia de giróscopo. En el menú de helicópteros estos modos de vuelo se activan automáticamente cuando las selecciona con el interruptor. NOR esta destinado a vuelo en estacionario ST1, para vuelo hacia delante y acrobacia básica ST2 puede usarse para invertidos y ST3 para autorotaciones, por esto incluye el bloqueo de motor, que permite desembragar el motor manteniendo el control sobre el colectivo. Cada uno de estos modos de vuelo se activa automáticamente al seleccionar HELI como tipo de modelo. Por defecto, los valores asignados a estos modos de vuelo son los siguientes :

68
- NOR esta activado cuando el interruptor SW3 esta hacia ATRÁS. - ST1 esta activado cuando el interruptor SW3 esta en el CENTRO - ST2 esta activado cuando el interruptor SW3 esta hacia delante - ST3 esta activado cuando el interruptor SW1 está ABAJO
Como todas estas funciones estan agrupadas en el interruptor SW3 , ST3, que esta en el interruptor SW1 tiene la máxima prioridad, seguida de ST2 y ST1. El modo NOR solo aparece cuando los demás están apagados. Curvas de paso y de motor, mezclador de revoluciones, y ganancia del giróscopo pueden ser fijadas independientemente para cada modo de vuelo Los valores asignados por defecto son válidos mientras que las instrucciones específicas de su aparato no indiquen lo contrario. En caso de discrepancia, son válidas las del fabricante de su modelo.