Embed Size (px)
Citation preview

ESCUELA POLITECNICA NACIONAL
SISTEMAS DE CONTROL
AUTOMATICO
PROYECTO
SEGUNDO BIMESTRE
CONTROL DE UNA UNIDAD DE
LECTURA-ESCRITURA DE UN DISCO
INTEGRANTES:
- STALIN NASIMBA
- SEBASTIAN
RIVADENEIRA
INGENIERIA ELECTRONICA EN CONTROL

ESCUELA POLITÉCNICA
NACIONAL
Facultad de ingeniería Eléctrica y Electrónica
Proyecto de Sistemas de Control Automático
1) Objetivos:- Modelar y describir el sistema de una unidad de lectura-escritura de un disco mediante su función de transferencia.- Analizar en el tiempo y en la frecuencia el sistema de una unidad de lectura-escritura de un disco mediante la herramienta ltiview en matlab.- Realizar el control de una unidad de lectura-escritura de un disco mediante el Control PID con la herramienta sisotool del matlab.
Descripción
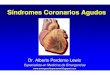
El objetivo del dispositivo de lectura de la unidad de disco es posicionar la cabeza lectora con la finalidad de leer los datos almacenados en una pista de disco, la posición de la cabeza de lectura es la variable que se controla, el disco gira a una velocidad entre 1800 y 7200 rpm y la cabeza por encima del disco a una distancia de menos de 100 nm. la especificación inicial para la precisión de la posición es de un µm. se desea también mover la cabeza desde la pista a hacia la pista b en intervalos de 50 ms.
Fig. 1: Unidad de disco y partes de una unidad de disco
SISTEMA NO LOCALIZADO

Definición.-El control no localizado de un sistema de lectura de un disco, se basa en la lectura del disco en un sitio especifico ya que no posee un sistema para poder manipular el movimiento atreves del disco.
1) Modelo: Función de Transferencia Deducción
Diagrama de Bloques
Fig. 2: Diagrama de bloques del sistema de lectura de la unidad de disco
Modelo del Sistema del Motor

G (s )=km
s (Js+b)(Ls+R) (Planta)
Ka (Amplificador)
H (s )=1 (Sensor)
Función de Transferencia del Motor
Gp(s)= Kms (Js+B)(Ls+R)
Tabla de Valores
Fig. 3: Parámetros típicos de un lector de unidad de disco
Reemplazando con los parámetros consultados:
Gp(s)= 5000s (s+20)(s+1000)
Step
1
Sensor
Scope
5000
s+1000
Motor CC
1s
Integrator
1
s+20
Brazo
1
Amplificador
Fig. 4: Diagrama de Bloques con valores reemplazados
Función de Transferencia del Sistema en Lazo Cerrado
Fig. 5: Diagrama de bloques del sistema de lazo cerrado
Y (s)R (s)
=kaGp(s)
1+kaGp(s)

Reemplazando con los parámetros consultados:
Y (s)R (s)
=5000k a
s ( s+20 ) ( s+1000 )+5000ka
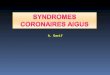
2) Análisis (Simulación)Analisis en el tiempoTabla de análisis:
Mp Ts EpOriginal 0% 15.5seg 0%
Sistema Original>> s=tf('s');>> b=20;>> r=1;>> j=1;>> l=0.001;>> km=5;>> G=zpk((km)/(s*(j*s+b)*(l*s+r))) Zero/pole/gain: 5000-----------------s (s+1000) (s+20)>> f=feedback(G,1) Zero/pole/gain: 5000-----------------------------(s+1000) (s+19.74) (s+0.2533)>> ltiview(f)
Rlocus(G)

Analisis de frecuenciaMf Mp AB Mr
Original 59.3 72.2dB 0.254rad/s 0
Margin (G)
-250
-200
-150
-100
-50
0
50
Mag
nitu
de (
dB)
10-1
100
101
102
103
104
105
-270
-225
-180
-135
-90
Pha
se (
deg)
Bode DiagramGm = 72.2 dB (at 141 rad/sec) , Pm = 89.3 deg (at 0.25 rad/sec)
Frequency (rad/sec)
Bode (f)

Bode Diagram
Frequency (rad/sec)
10-2
10-1
100
101
102
103
104
105
-250
-200
-150
-100
-50
0
System: fFrequency (rad/sec): 0.254Magnitude (dB): -3.03
Mag
nitu
de (
dB)
2) Control PIDParámetros de diseño.Ts<3segMp<10%Ep<10%Mf>60ºMG>10db
Análisis en el tiempo
Mp Ts EpOriginal 0% 15.5seg 0%Compensado
0% 0.00302 0%
Análisis en la frecuencia
MG MfOriginal 72.2dB 89.3º
Compensado
inf 62.6º
Original1.- Analisis del sistema original

Se procede a realizar un
control PD porque en el sistema poseemos un untegrador lo cual hace que el error de posición sea cero.
Se añade un cero en s= -20 para mejorar el estado transitorio
Vemos la Respuesta del sistema compensado a una entrada paso:

Valores para calcular parámetros:
Se procede a calcular los parámetros necesarios para realizar la compensación.
>> Gc=kd*(s+(Kp/kd))>> gc=46778*(s+20)Kd=46778;Kp=935560;
SISTEMA LOCALIZADODefinición:El Sistema de control localizado de un sistema de lectura de una unidad de disco se refiere al control mediante el control atreves de una cabeza y flexor unido al brazo de lectura el cual nos permite

movernos atreves del disco y obtener información en cualquier parte de este.
1) Modelo: Función de Transferencia Deducción de la función de transferenciaDebido a las perturbaciones que existen es muy importante tener la cabeza y el flexor en un sistema de lectura del disco Para eso tenemos que aumentarle al sistema anteriormente calculado la función de transferencia que involucra al flexor y cabeza la cual viene dada por:
Al aumentar al sistema anteriormente deducido tenemos:Diagrama de Bloques
Modelo del Sistema
G (s )=km
s (Js+b)(Ls+R) (Motor cc y brazo)
G 2 ( s )= 1
( sW n
)2
+ 2 εW n
s+1 (Cabeza y flexor)
Ka (Amplificador)
H (s )=1 (Sensor)Tabla de Valores
Reemplazando con los parámetros consultados:
G 2 ( s )= 1
2,81e-9s2+3,18e-5 s+1

Step
1
Sensor
Scope
5000
s+1000
Motor CC
1s
Integrator
1
2.81e-9s +3.18e-5s+12
Cabeza y flexor
1
s+20
Brazo
1
Amplificador
Función de Transferencia del Sistema en Lazo Cerrado
Y (s)R (s)
=kaGp(s)G 2(s)
1+kaGp(s)G2 (s)
Reemplazando con los parámetros consultados:
Y (s)R (s)
=5000ka
s ( s+1000 )( (s+20 ) (2,81e-9 s2+3,18e-5 s+1 )+5 ka)2) Análisis (Simulación)Analisis en el tiempoTabla de análisis:
Mp Ts EpOriginal 0% 19.4seg 0%
Sistema Original
>> ka=1>> g=5000*ka/(s*((s+1000)*(s+20)*((2.81*exp(-9)*s^2)+(3.18*exp(-5)*s)+1)+5000*ka)) Transfer function: 5000-----------------------------------------------------------0.0003468 s^5 + 0.3751 s^4 + 29.79 s^3 + 1449 s^2 + 25000 s
>> f=feedback(g,1)Transfer function: 5000------------------------------------------------------------------0.0003468 s^5 + 0.3751 s^4 + 29.79 s^3 + 1449 s^2 + 25000 s + 5000
>> ltiview(f)

Step Response
Time (sec)
Am
plitu
de
0 5 10 15 20 25 300
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
>> rlocus(g)
-3000 -2500 -2000 -1500 -1000 -500 0 500 1000 1500 2000-2500
-2000
-1500
-1000
-500
0
500
1000
1500
2000
2500Root Locus
Real Axis
Imag
inar
y A
xis
Analisis de frecuencia

Mf Mp AB MrOriginal 89.3 45.6dB 0.205rad/s 0
Margin (G)
-400
-300
-200
-100
0
100
Mag
nitu
de (
dB)
10-1
100
101
102
103
104
105
-450
-360
-270
-180
-90
Pha
se (
deg)
Bode DiagramGm = 45.6 dB (at 29.1 rad/sec) , Pm = 89.3 deg (at 0.2 rad/sec)
Frequency (rad/sec)
Bode (f)
10-2
10-1
100
101
102
103
104
105
-350
-300
-250
-200
-150
-100
-50
0
System: fFrequency (rad/sec): 0.204Magnitude (dB): -3.05
Mag
nitu
de (
dB)
Bode Diagram
Frequency (rad/sec)
Control PID

Parámetros de diseño.Ts<3segMp<10%Ep<10%Mf>60ºMG>10db
Mp Ts EpOriginal 0% 19.4seg 0%Compensado
0% 0.804seg 0%
Original
Se debe realizar un control PDI para poder mejorar el transitorio y error aunque ya posee un integrador.
Se procede a implementar dos ceros en diferentes puntos los cuales nos dan diferentes respuestas como las siguientes

Después de varios intentos procedemos a ver los puntos más actos para que satisfagan la ecuación
Se añaden 2 ceros en el punto -20 y -483 para mejorar el transitorio Al añadirlos tenemos los siguientes efectos
El transitorio mejoro considerablemente, y la respuesta en frecuenta también es bastante aceptable por lo que procedemos a calcular los parámetros de la compensación.

Los parámetros son los siguientes:
Gc=kd*(s^2+s*(Kp/kd)+(ki/kd))
Kd=2.51*10^-3
Kp=20.75
Ki=398.4
Al tener estos parámetros la compensación PID es satisfactoria ya q cumple con todos los parámetros de
diseño establecidos al comienzo.
BIBLIOGRAFIA
Electro-Craf Corporation, Motomatic Control System Laboratory, 1978.
Ogata K., Ingeniería de Control Moderna, Prentice Hall, Tercera edición, 1999.
Kuo B., Sistemas de Automáticos de Control, Prentice Hall, Séptima edición, 1997.
Dorf R., Modern Control Systems, 8th edition, Addison Wesley, 1998.