Embed Size (px)
Citation preview
นาวิกศาสตร์ ปีที่ ๙๕ ฉบับที่ ๑ มกราคม ๒๕๕๕
มนุษยชาติกับเทคโนโลยีตอนที่ ๔ ยานผิวน้ำไร้คนขับ
พลเรือโท ทวีวุฒิ พงศ์พิพัฒน์
Since 2459 B.E.
บทความ
011

นาวิกศาสตร์ ปีที่ ๙๕ ฉบับที่ ๑ มกราคม ๒๕๕๕
หลังจากสงครามโลกครั้งที่ ๒USV ได้รับการพัฒนาสำหรับวัตถุประสงค์ต่าง ๆ เช่น การกวาด ทุ่นระเบิด การตรวจสอบพื้นที่ความเสียหาย ยกตัวอย่างเช่นในปีค.ศ.๑๙๔๖USVได้นำไปใช้ในการเก็บตัวอย่างน้ำหลังจากการระเบิดของระเบิดนิวเคลียร์ภายหลังในช่วงปีค.ศ.๑๙๖๐เรือไฟเบอร์ความยาว ๒๓ ฟุต ได้ใช้เป็นเรือลากในการกวาด ทุ่นระเบิดซึ่งควบคุมโดยรีโมทคอนโทรล และเรือเหล่านี้ยังถูกใช้ในการกวาดทุ่นระเบิดในการปฏิบัติการในเวียดนาม ในช่วงปี ค.ศ.๑๙๙๐ เรือกวาด ทุ่นระเบิดชนิดควบคุมระยะไกลรุ่นแรกได้รับการนำมาใช้ในการปฏิบัติการในอ่าวเปอร์เซียทั้งนี้USV
Remote Minehunting Operational Prototype (RMOP) in the Persian Gulf
ปัจจุบันยานผิวน้ำไร้คนขับได้มีการพัฒนาอย่างรวดเร็วและในกองทัพเรือหลายชาติก็ได้นำมาใช้ในการปฏิบัติการทางทหารแล้วเนื่องจากเป็นเทคโนโลยี ซึ่งสามารถพัฒนาได้อย่างรวดเร็ว และมีการปฏิบัติการอยู่บนผิวน้ำซึ่งสามารถติดอุปกรณ์ในการตรวจจับ และยุทโธปกรณ์ต่าง ๆ เพื่อเพิ่มขีดความสามารถ ในการรบได้อย่างมากมายและหลากหลาย ชนิดของยานผิวน้ำไร้คนขับ
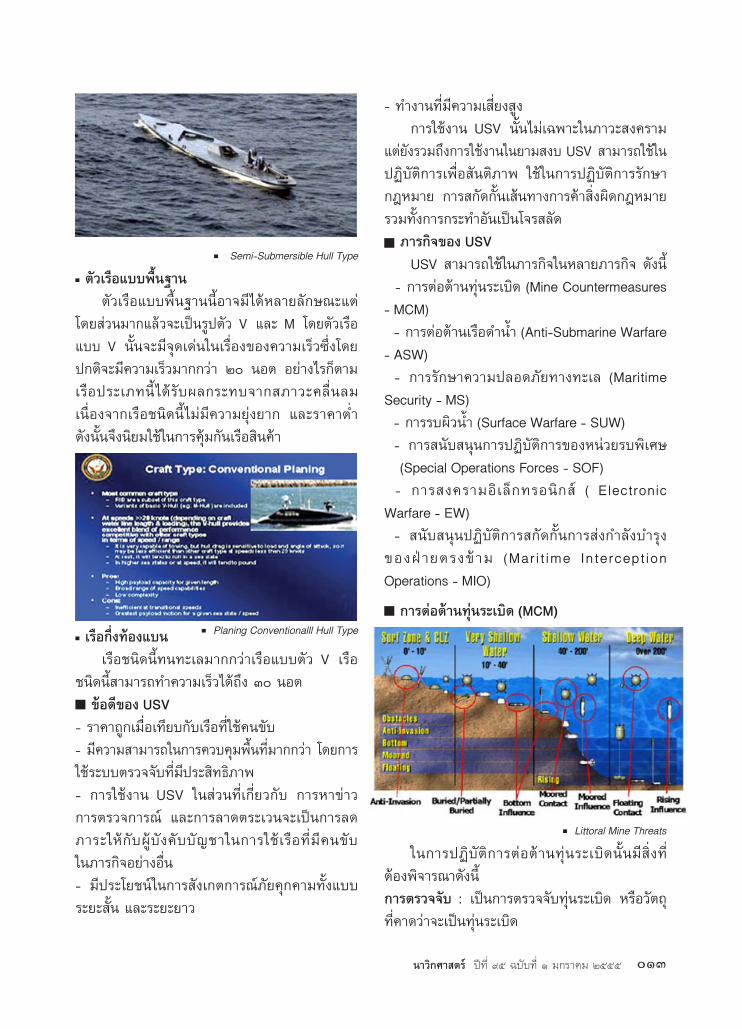
ยานผิวน้ำไร้คนขับ สามารถแบ่งได้ตามคุณลักษณะ ดังนี้ แบบกึ่งดำน้ำ (Semi-Submersible Craft) สำหรับยานชนิดนี้ตัวเรือเกือบทั้งหมดจะอยู่ใต้ผิวน้ำ เนื่องจากตัวเรืออยู่ใต้น้ำทำให้ได้รับผลกระทบจากสภาพของคลื่นลมน้อยทำให้สามารถปฏิบัติการณ ์ได้เกือบทุกสภาพอากาศ และเนื่องจากตัวเรืออยู่ใต้น้ำ จึงยากที่จะตรวจพบโดยเรดาร์และสายตาอย่างไรก็ ตามตัวเรือชนิดนี้มีราคาที่สูงกว่าเรือแบบปกติเนื่องจากมีความยุ่งยากในการผลิต และออกแบบรวมถึงความเร็วสูงสุดที่ทำได้ก็ไม่เกิน๒๕นอตโดยมี ความยาว๗เมตร
SPARTAN USV Demonstrating ISR Missions in Persian Gulf
ได้ถูกใช้ในปฏิบัติการกวาดทุ่นระเบิดเป็นหลักในการปฏิบั ติ การ ในอิ รั ก ในปี ค .ศ .๒๐๐๓ โดย เรื อ Spartan และถูกนำไปในการลาดตระเวนในทะเลโดยใช้เรือยางท้องแข็งควบคุมโดยรีโมทคอนโทรล
ที่ได้กล่าวไปแล้วในตอนก่อนว่ายานไร้คนขับมีใช้ในปัจจุบันทั้ง๓มิติอย่างไรก็ตามในตอนที่ผ่านมาได้กล่าวถึงอากาศยานไร้คนขับ ซึ่งขณะนี้กำลังมีการพัฒนาอย่างรวดเร็วและมีการใช้งาน
อย่างกว้างขวางแต่ทั้งนี้ยานไร้คนขับอีก๒มิติคือยานใต้น้ำไร้คนขับ(UnmannedUnderwaterVehicles-UUV)และยานผิวน้ำไร้คนขับ(UnmannedSurfaceVehicles-USV)ก็มีการพัฒนาควบคู่กันไปด้วยซึ่งในบทนี้ จะกล่าวถึงยานผิวน้ำไร้คนขับเพื่อให้ผู้อ่านได้รับทราบวิวัฒนาการที่เกิดขึ้นและนำไปใช้ประโยชน์ต่อไป
ตาม
ยานผิวน้ำไร้คนขับ (USV)
012
นาวิกศาสตร์ ปีที่ ๙๕ ฉบับที่ ๑ มกราคม ๒๕๕๕
ตัวเรือแบบพื้นฐาน ตัวเรือแบบพื้นฐานนี้อาจมีได้หลายลักษณะแต่โดยส่วนมากแล้วจะเป็นรูปตัวV และM โดยตัวเรือแบบV นั้นจะมีจุดเด่นในเรื่องของความเร็วซึ่งโดยปกติจะมีความเร็วมากกว่า ๒๐นอต อย่างไรก็ตาม เรือประเภทนี้ได้รับผลกระทบจากสภาวะคลื่นลมเนื่องจากเรือชนิดนี้ไม่มีความยุ่งยาก และราคาต่ำ ดังนั้นจึงนิยมใช้ในการคุ้มกันเรือสินค้า
Planing Conventionalll Hull Type เรือกึ่งท้องแบน เรือชนิดนี้ทนทะเลมากกว่าเรือแบบตัวV เรือชนิดนี้สามารถทำความเร็วได้ถึง๓๐นอต ข้อดีของ USV
-ราคาถูกเมื่อเทียบกับเรือที่ใช้คนขับ-มีความสามารถในการควบคุมพื้นที่มากกว่าโดยการ ใช้ระบบตรวจจับที่มีประสิทธิภาพ- การใช้งานUSV ในส่วนที่เกี่ยวกับ การหาข่าวการตรวจการณ์ และการลาดตระเวนจะเป็นการลดภาระให้กับผู้บังคับบัญชาในการใช้เรือที่มีคนขับ ในภารกิจอย่างอื่น- มีประโยชน์ในการสังเกตการณ์ภัยคุกคามทั้งแบบระยะสั้นและระยะยาว
-ทำงานที่มีความเสี่ยงสูง การใช้งานUSV นั้นไม่เฉพาะในภาวะสงครามแต่ยังรวมถึงการใช้งานในยามสงบUSVสามารถใช้ใน ปฏิบัติการเพื่อสันติภาพ ใช้ในการปฏิบัติการรักษากฎหมาย การสกัดกั้นเส้นทางการค้าสิ่งผิดกฎหมายรวมทั้งการกระทำอันเป็นโจรสลัด ภารกิจของ USV
USVสามารถใช้ในภารกิจในหลายภารกิจดังนี้ -การต่อต้านทุ่นระเบิด(MineCountermeasures -MCM)-การต่อต้านเรือดำน้ำ(Anti-SubmarineWarfare-ASW) - การรักษาความปลอดภัยทางทะเล (MaritimeSecurity-MS) -การรบผิวน้ำ(SurfaceWarfare-SUW) - การสนับสนุนการปฏิบัติการของหน่วยรบพิเศษ (SpecialOperationsForces-SOF) - การสงครามอิเล็กทรอนิกส์ ( ElectronicWarfare-EW) - สนับสนุนปฏิบัติการสกัดกั้นการส่งกำลังบำรุงของฝ่ายตรงข้าม (Mar i t ime In tercept ionOperations-MIO)
Littoral Mine Threats
ในการปฏิบัติการต่อต้านทุ่นระเบิดนั้นมีสิ่งที่ต้องพิจารณาดังนี้การตรวจจับ: เป็นการตรวจจับทุ่นระเบิด หรือวัตถุที่คาดว่าจะเป็นทุ่นระเบิด
Semi-Submersible Hull Type
การต่อต้านทุ่นระเบิด (MCM)
013

นาวิกศาสตร์ ปีที่ ๙๕ ฉบับที่ ๑ มกราคม ๒๕๕๕
การพิสูจน์ทราบ : เป็นการพิสูจน์ทราบวัตถุที่ตรวจพบว่าเป็นทุ่นระเบิดหรือไม่การหาตำบลที่: การหาตำบลที่ ๆ แน่นอนใต้ท้องทะเลโดยอ้างอิงกับสภาพแวดล้อมการตรวจสอบ : ให้ประมาณการว่าวัตถุที่คล้าย ทุ่นระเบิดนั้นคือทุ่นระเบิดและทำการตรวจสอบวัตถุดังกล่าวด้วยการมองเห็นโดยการใช้ประดาน้ำ หรือกล้อง ทั้งนี้ เทคโนโลยีโซนาร์ที่ทันสมัยอาจช่วยให้การพิสูจน์ทราบทำได้ง่ายขึ้นการทำลาย:อาจทำได้โดยการยิงเป้าลวงหรือการกวาดทุ่นระเบิด การต่อต้านเรือดำน้ำ (ASW)
USV สามารถที่จะนำไปใช้ในปฏิบัติการเพื่อป้องกันน่านน้ำ หรือช่องทางเดินเรือได้ ในหลาย ๆสถานการณ์USV ที่ติดตั้งระบบตรวจจับสามารถที่จะนำมาใช้ในการขยายพื้นที่ตรวจจับได้โดยในขณะเดียวกันก็เป็นการลดความเสี่ยงสำหรับเจ้าหน้าที่ ในปฏิบัติการต่อต้านเรือดำน้ำUSVสามารถทำงานร่วมกับเรือที่ใช้คนขับได้ ทั้งนี้ระดับของการรักษาความปลอดภัยก็ยังสามารถเพิ่มหรือลดได้ตามสถานการณ์โดยไม่จำเป็นต้องนำเรือที่มีคนขับไปในบริเวณที่มีความเสี่ยง แนวความคิดที่เกี่ยวกับระบบการต่อต้านเรือดำน้ำ มีหลาย ๆ เทคโนโลยีที่มีความสำคัญที่จะทำให้การใช้USVในปฏิบัติการต่อต้านเรือดำน้ำเป็นจริงได้ สิ่งเหล่านั้นก็คือ ระบบการตรวจจับ การคำนวณการเตรียมอาวุธ และการใช้อาวุธ ทั้งนี้เทคโนโลยี ดังที่ได้กล่าวไปแล้วปัจจุบันมีอยู่แต่อาจจะยังไม่เหมาะ ที่จะนำไปใช้ในการปฏิบัติการUSVดังนั้นในปัจจุบันกองทัพเรือชาติต่างๆได้ให้ความสนใจในการติดตั้งอาวุธให้กับเรือไร้คนขับเป็นอย่างมากเพื่อให้USVสามารถปฏิบัติงานได้จริงจากการวิจัยในปัจจุบันพบว่าเรือความยาว ๗ เมตร ชนิดกึ่งดำน้ำได้รับการ ติดตั้งเครื่องมือตรวจจับ อาวุธ และระบบขับเคลื่อน ที่จำเป็นและนำมาใช้ในการป้องกันพื้นที่ทั้งนี้ระบบการสื่อสารที่ใช้อาจจะเป็นย่านUHF ที่ระยะขอบฟ้าและดาวเทียมโดยมีระบบการเข้ารหัสในการรักษา
ความปลอดภัยเพิ่มขึ้น การรักษาความปลอดภัยทางทะเล (MS)
การรักษาความปลอดภัยทางทะเลนั้นรวมถึงการป้องกันท่าเรือ เรือ และสิ่งอำนวยความสะดวกอื่น ๆ เช่น อู่เรือ พื้นที่ทิ้งสมอ และคลังเก็บสินค้าโดนแนวทางการใช้งานในด้านรักษาความปลอดภัยทางทะเลได้แก่- การรวบรวมข้อมูลข่าวสารซึ่งอาจจะได้มาจากการดักรับสัญญาณ การใช้เครื่องมืออิเล็กทรอนิกส์ การตรวจจับและภาพถ่าย- การตรวจจับ และหาตำบลที่ของภัยคุกคามประเภท สารเคมี ชีวะภาพ นิวเคลียร์กัมมันตภาพ รังสีและวัตถุระเบิด-การเฝ้าระวังพื้นที่ชายฝั่ง- การนำเครื่องมือตรวจจับไปวางในตำแหน่งต่าง ๆ -การจัดทำแผนที่และการระบุตำแหน่งของวัตถุ-การขัดขวางภัยคุกคามต่างๆ- การเฝ้าตรวจการจราจรในเส้นทางเดินเรือ รวมถึง การยับยั้งการกระทำผิดกฎหมายต่าง ๆ ในเส้นทางเดินเรือเช่นการขนสินค้าผิดกฎหมายและยาเสพติด การต่อต้านเรือผิวน้ำ (ASUW)
ความสามารถในการทำสงครามผิวน้ำนั้น จะคล้ายกันกับการรักษาความปลอดภัยทางทะเลเพียงแต่การทำสงครามผิวน้ำเป็นการปฏิบัติการ ในทะเลเปิด โดยเทคโนโลยีที่ใช้จะเป็นการสนับสนุนระบบการรับรู้สถานการณ์ การพิสูจน์ฝ่าย และการปฏิบัติการชนิดนี้ต้องการเรือขนาดใหญ่ และมีความเร็วสูงประมาณ๓๐-๔๐นอต
Surface Warfare
014

นาวิกศาสตร์ ปีที่ ๙๕ ฉบับที่ ๑ มกราคม ๒๕๕๕
การสงครามอิเล็กทรอนิกส์ (EW) ในการทำสงครามอิเล็กทรอนิกส์นั้น USVจำเป็นต้องมีขีดความสามารถในการ ดักรับ รบกวนและการเตือนภัยโดยUSVควรจะต้องมีระยะปฏิบัติการที่พอเหมาะทนทะเลมีพลังงานที่เพียงพอและสามารถแบกรับอุปกรณ์ที่ทำการติดตั้งได้มากพอ การปฏิบัติการสงครามอิเล็กทรอนิกส์นั้นUSVทุกขนาดสามารถปฏิบัติภารกิจนี้ได้ อย่างไรก็ตามขนาดของUSV ย่อมส่งผลกระทบโดยตรงต่ออุปกรณ์ที่ยานสามารถแบกรับได้ยกตัวอย่างเช่นขนาดของสายอากาศ โซนาร์ หรือ ความสิ้นเปลืองพลังงาน ดังนั้นจำเป็นต้องมีการพัฒนาเทคโนโลยีใหม่ ๆ ขึ้นมาเพื่อทำให้USV มีขนาดเล็กลง และสามารถปฏิบัติงานได้นานขึ้น การปฏิบัติการเพื่อการสกัดกั้น (MIO) การปฏิบัติการเพื่อสกัดกั้นนี้เป็นปฏิบัติการเพื่อหลอกล่อ ขัดขวาง หน่วงเวลา หรือการทำลาย กองกำลังของฝ่ายตรงข้ามก่อนที่จะทำอันตรายกับกองกำลังฝ่ายเรา เรือสำหรับภารกิจประเภทนี้ควรมีขนาดเล็กเพื่อให้สะดวกต่อการขนส่ง และง่ายในการปล่อยจากเรือแม่ สำหรับเรือที่ใช้ในการทดสอบในขั้นต้นเป็นเรือที่มีความยาวประมาณ ๕ เมตรอย่างไรก็ตามยานขนาดความยาว ๓ เมตรก็ถือว่าเพียงพอเพราะน้ำหนักของน้ำมันที่ต้องการสำหรับภารกิจนี้ไม่จำเป็นต้องมาก เนื่องจากภารกิจนี้ยานUSV จะปฏิบัติการไม่ห่างจากเรือแม่มากนัก โดย บนยานจะมีอุปกรณ์ตรวจการณ์พื้นฐานได้แก่กล้องตรวจการณ์ทั้งกลางวันและกลางคืน และวิทยุสื่อสารดังนั้นการสื่อสารที่เชื่อถือได้จึงมีความจำเป็นอย่างยิ่ง การพัฒนายานใต้น้ำไร้คนขับ ของประเทศต่าง ๆ สหรัฐอเมริกา
ได้มีการพัฒนาดังนี้X-Class:มีราคาถูกได้รับการออกแบบตามภารกิจดังนั้นจึงยอมให้มีการสูญเสียได้Harbor Class (๗ เมตร):เป็นเรือชั้นที่นำมาใช้มากที่สุด โดยมีความยาว ๗ เมตรและมีความทนทะเลปานกลาง เป็นเรือที่ใช้มากในภารกิจการลาดตระเวน
X-Class USVs
Harbor Class USV
Snorkeler Class USV
และรักษาความปลอดภัยทางทะเลSnorkeler Class (๗ เมตร): เป็นเรือแบบกึ่งดำน้ำจะยื่นเฉพาะท่อหายใจขึ้นมาเหนือน้ำในขณะปฏิบัติภารกิจ เรือชนิดนี้จะถูกใช้ในภารกิจต่อต้านทุ่นระเบิดและต่อต้านเรือดำน้ำFleet Class (๑๑ เมตร) เป็นUSV ที่ปฏิบัติงานร่วมกับกองเรือโดยเรือ มีขนาด ๑๑ เมตร มีความเร็ว และความทนทานปานกลาง สนับสนุนการปฏิบัติการต่อต้านเรือดำน้ำรบผิวน้ำ และการทำสงครามอิเล็กทรอนิกส์ได้เป็นอย่างดี
015

นาวิกศาสตร์ ปีที่ ๙๕ ฉบับที่ ๑ มกราคม ๒๕๕๕
Yamaha UMV-O
Yamaha UMV-H
ประเทศแคนาดา ประเทศแคนาดาได้สร้างUSV ที่เป็นเรือยางท้องแข็ง(RigidInflatableBoats-RIB)ความยาว๑๑ เมตรโดยบริษัทSubmarineEngineeringLtd(ISE)ควบคุมโดยระบบที่เรียกว่าTacticalController (TC)Kit โดยอุปกรณ์ดังกล่าวจะทำการควบคุมUSV ผ่านทางช่องสัญญาณควบคุม โดยเรือมีทั้งหมด๔รุ่นคือDolphin MK II :เป็นแบบกึ่งดำน้ำซึ่งถูกออกแบบมา ครั้ งแรกเพื่องานด้านอุทกศาสตร์ ต่อมาในปี ค.ศ.๑๙๘๕เรือรุ่นDolphinจำนวน๒ลำได้ถูกขายให้กับ ทร.สหรัฐ ฯ เพื่อนำไปติดตั้งอุปกรณ์บนเรือและใช้ ในกิจการของ ทร.สหรัฐ ฯ และในปี ค.ศ.๑๙๘๘Dolphinอีก๒ลำได้ถูกซื้อเพื่อนำไปใช้เป็นเรือล่าทำลายทุ่นระเบิดผ่านการควบคุมระยะไกล ส่วนเรือที่พัฒนาต่อจากรุ่นนี้ก็ได้แก่Doradoซึ่งเป็นของประเทศแคนาดาRMSในประเทศสหรัฐฯและSeakeeperของประเทศฝรั่งเศสSeal : ได้ถูกนำเสนอให้กับกระทรวงความมั่นคงในภารกิจที่เกี่ยวกับค้นหาและช่วยเหลือSARPAL : เป็นเรือที่มีระบบขับเคลื่อนแบบอัตโนมัติก็ได้ถูกนำเสนอในกับกระทรวงความมั่นคงเช่นเดียวกันThe Machine : ได้นำอุปกรณ์ควบคุมTCKit เข้ามาใช้กับเรือยางท้องแข็งRIB ความยาว ๘ เมตร เพื่อทดสอบให้กับทร.สหรัฐฯ
ยานผิวน้ำไร้คนขับ แบบต่าง ๆ ของ ประเทศแคนาดา
Fleet Class USV ประเทศญี่ปุ่น
ประเทศญี่ปุ่นได้พัฒนาUSVขึ้นมา๒รุ่นคือยานรุ่นความเร็วสูง (UnmannedMarineVehicleHigh –SpeedUMV-H) และยานรุ่นทะเลเปิด(UnmannedMarineVehicleOceanUMV-O)ในปีค.ศ.๒๐๐๔ โดยUMV-H นั้นเป็นยานรูปตัววีทำความเร็วได้ประมาณ ๔๐ นอต ขับเคลื่อนด้วยระบบเครื่องพ่นน้ำ (Water-jet) โดยยานรุ่นนี้สามารถทำงานได้๒ ระบบคือแบบมีคนขับและแบบไม่มีคนขับ มีความยาว ๔.๔๔ เมตร ซึ่งใหญ่เพียงพอสำหรับการติดตั้งระบบกล้องใต้น้ำ และระบบโซนาร์ สำหรับรุ่นUMV-O นั้นได้รับการออกแบบมาสำหรับการปฏิบัติงานในมหาสมุทร ซึ่งโดยปกติจะถูกใช้งานวิจัยทางวิทยาศาสตร์
016

นาวิกศาสตร์ ปีที่ ๙๕ ฉบับที่ ๑ มกราคม ๒๕๕๕
ประเทศอิสราเอล ทร.อิสราเอลใช้ยานรุ่นStingray สำหรับการติดตามเป้าหมาย โดยยานรุ่นนี้จะมีขนาดเล็กกว่าRoboskiในปีค.ศ.๒๐๐๓บริษัทRafaelได้เสนอยาน รุ่นProtector ซึ่งได้รวมระบบการสู้รบ ระบบขับเคลื่อนอัตโนมัติ และระบบควบคุมจากระยะไกลเข้าด้วยกัน โดยยานProtector นี้มีคุณสมบัติที่ง่ายต่อการควบคุม และตรวจจับยาก สามารถที่จะใช้ในหลายๆภารกิจทั้งนี้ประเทศสิงค์โปร์ได้นำยานรุ่นนี้เข้ามาใช้งานตั้งแต่ปีค.ศ.๒๐๐๕
ยานผิวน้ำไร้คนขับ แบบต่าง ๆ ของ ประเทศอิสราเอล
ประเทศโปรตุเกส ยานรุ่นDELFIMและCARAVELA ได้รับการสร้างขึ้นโดยห้องวิจัยPortugueseDynamicalSystemsandOceanRoboticsเป็นยานที่สามารถขับเคลื่อนแบบอัตโนมัติมีระยะทำการไกลถึง๗๐๐ไมล์
ยานผิวน้ำไร้คนขับ แบบ DELFIM และ CARAVELAของประเทศโปรตุเกส
ประเทศอังกฤษ มหาวิทยาลัย Plymouth ได้พัฒนาเรือรุ่นSpringerขึ้นมาโดยมีขีดความสามารถในการทำงานในบริเวณน้ำตื้นสำหรับงานตรวจสอบสภาพแวดล้อมH.Scientific ได้นำเสนอระบบควบคุมระยะไกลอัตโนมัติ (RCAS) สำหรับการควบคุมUSV ทั้งนี้
ขีดความสามารถและการนำไปใช้งานนั้นไม่ได้กล่าวไว ้ บริษัทQinetiQ ได้นำเสนอระบบShallowWater InfluenceMinesweepingSystem เพื่อสนับสนุนการปฏิบัติการต่อต้านทุ่นระเบิดในสงครามอ่าว(2003)ต่อมาบริษัทQinetiQได้พัฒนายานในรุ่นFENRIR ซีรีส์ โดยวัตถุประสงค์คือการนำยานขนาดเล็กเน้นไปทางยานใต้น้ำ และทำการติดตั้งอุปกรณ์เพื่อใช้สำหรับภารกิจของทร.
ยานผิวน้ำไร้คนขับ แบบต่าง ๆ ของ ประเทศอังกฤษ
ประเทศฝรั่งเศส ทร.ฝรั่งเศสได้นำเสนอยานรุ่นSeaKeeperซึ่งเป็นยานชนิดกึ่งดำน้ำคล้ายกับยานรุ่นRMS โดยSeaKeeper นี้ได้ถูกนำไปใช้ในภารกิจล่าทำลาย ทุ่นระเบิดและรักษาความปลอดภัยท่าเรือ ยานรุ่นArgonaut ได้รับการใช้โดยเจ้าหน้าที่ ดับเพลิงสำหรับตรวจสอบตู้เรือสินค้าเพื่อพิสูจน์ทราบ บริษัทSirenhaได้พัฒนายานเจ็ตสกีไร้คนขับที่ชื่อว่า Rodeur
017

นาวิกศาสตร์ ปีที่ ๙๕ ฉบับที่ ๑ มกราคม ๒๕๕๕
บริษัทACSA ได้พัฒนายานรุ่นBasil และMiniVAMP สำหรับการสำรวจท่อก๊าซในทะเล โดยยานทั้ง๒รุ่นเป็นชนิดราคาถูกและไม่ได้เป็นแบบอัตโนมัติแบบเต็มรูปแบบ ต่อมาในปี ค.ศ.๒๐๐๔ยานBasil II ได้ถูกพัฒนาให้สามารถปฏิบัติการได้ยาวนานขึ้น(ถึง๑๒ชม.)และมีระยะปฏิบัติงานไกล ๑๕ กิโลเมตร ติดตั้งเซลล์แสงอาทิตย์สำหรับระบบขับเคลื่อนมอเตอร์
ยานผิวน้ำไร้คนขับ แบบต่าง ๆ ของ ประเทศฝรั่งเศส ประเทศไทย
ในส่วนของกองทัพเรือ โดยสำนักงานวิจัยและพัฒนาการทางทหารกองทัพเรือ ได้ดำเนินการพัฒนายานผิวน้ำไร้คนขับในระยะที่๑ซึ่งเริ่มดำเนินการในปี พ.ศ.๒๕๕๓ และสิ้นสุดเมื่อปี พ.ศ.๒๕๕๔โดยเรือต้นแบบเป็นเรือไร้คนขับบังคับวิทยุสำหรับสนับสนุนการตรวจค้นเรือต้องสงสัยในเวลากลางวันสามารถลำเลียงได้ทางบกเพื่อให้สามารถใช้กับ สถานีฝั่งได้หรือนำไปติดตั้งกับเรือไม่ต่ำกว่าเรือตรวจการณ์ปืน(ตกป.)ชุดร.ล.หัวหินโดยปรับปรุงเรือไร้คนขับระยะที่๑ให้มีความทนทะเลโดยศึกษาวิจัยร่วมกับหน่วยผู้ใช้ทั้งสถานีฝั่งและเรือให้สามารถ นำไปใช้ได้อย่างเป็นรูปธรรม รวมทั้งเป็นไปความต้องการทางยุทธการ เพื่อสร้างเรือต้นแบบลำต่อไปให้มีความเหมาะสมกับการใช้งานจริงมากยิ่งขึ้นซึ่งการ พัฒนาดังกล่าวได้เสร็จสิ้นลงแล้ว โดยมีคุณลักษณะคือยาว๔.๔๐เมตรกว้าง๒เมตรความเร็วสูงสุด๖๐ กม./ชม.ใช้น้ำมันเชื้อเพลิง เบนซิน ๙๑ ผสมน้ำมันหล่อลื่น ความสิ้นเปลืองน้ำมันเชื้อเพลิง ๑๘ลิตร/ชม.บรรทุกน้ำหนักสูงสุดได้๔๐๐กิโลกรัมมีที่นั่ง สำหรับผู้โดยสาร ๔ ที่นั่ง ระบบควบคุม สามารถใช้ได้ ๒ ระบบ ควบคุมด้วยรีโมทบังคับวิทยุ และ
ควบคุมด้วยผู้โดยสารประจำเรือ ระยะไกลสุดที่สามารถควบคุมด้วยรีโมท๔กิโลเมตร
ต้นแบบเรือไร้คนขับระยะที่ ๑ ของกองทัพเรือ
ต่อมาสำนักงานวิจัยและพัฒนาการทางทหารกองทัพเรือ ได้เสนอโครงการพัฒนาเรือไร้คนขับระยะที่ ๒ โดยจะใช้ภารกิจในการตรวจค้น โดยออกแบบให้ตัวเรือมีขนาดเหมาะสมมากขึ้น สามารถ บรรทุกทางถนนและนำไปใช้ประโยชน์ ในพื้นที่ ที่ต้องการหรือขนไปกับเรือขนาดเรือตรวจการณ์ปืนขึ้นไปและติดตั้งระบบตรวจสอบได้แก่กล้องสำหรับส่งภาพให้กับสถานีควบคุมหรือเรือควบคุมในภารกิจช่วยเหลือสนับสนุนการตรวจค้น ในระยะที่กล้องสามารถแสดงภาพได้ชัดเจน และมีระบบประกาศ คำสั่งถ่ายทอดมาจากสถานีควบคุมที่เรือควบคุม ในการตรวจสอบเรือต้องสงสัย ซึ่งเป็นการขยายผลโครงการในระยะที่ ๑ โดยใช้งบประมาณในการดำเนินการประมาณ ๓ ล้านบาท ใช้เวลาในการดำเนินการ๒ปีคือปีพ.ศ.๒๕๕๕และพ.ศ.๒๕๕๖ ซึ่งเมื่อโครงการนี้จบลงแล้ว คาดว่าจะสามารถนำไปพิจารณาดำเนินการต่อยอดเพื่อพัฒนาระบบควบคุม ระบบตรวจการณ์ และการใช้อาวุธ เพื่อเข้าสู่มาตรฐานสากลต่อไป บทสรุป
จากเทคโนโลยีที่มีการพัฒนาอย่างต่อเนื่อง การรบจึ งจำ เป็นต้องพัฒนาให้สอดคล้องกับเทคโนโลยีดังกล่าว การใช้ยานผิวน้ำไร้คนขับในปัจจุบันได้มีการดำเนินการอย่างรวดเร็วและต่อเนื่องเพื่อให้สามารถปฏิบัติการได้ทั้งในเวลากลางวันและ
018

นาวิกศาสตร์ ปีที่ ๙๕ ฉบับที่ ๑ มกราคม ๒๕๕๕
“เทคโนโลยี ก้าวไกล ไปข้างหน้า ความเหนือกว่า จำเป็น ต้องฝึกฝนหมั่นใฝ่หา ความรู้ ทั่วทุกคน ดำรงตนพัฒนา ก้าวหน้าไกลความรู้นั้น อาจเรียนทัน กันถ้วนหน้า สิ่งเหนือกว่า คือจรรยา ไขว่คว้าได้แต่สิ่งหนึ่ง ควรยึดมั่น ฝังหทัย ใช่อื่นใด คือภักดี นาวีเอย”
กลางคืน รวมทั้งยังสามารถลดอัตราเสี่ยงสำหรับเรือผิวน้ำโดยสามารถใช้เป็นเรือตรวจการณ์หรือScout เพื่อใช้ในภารกิจต่าง ๆ ได้ หลายรูปแบบ ทั้งยังสามารถลดความเสี่ยงในการสูญเสียทั้งเรือและ กำลังพลของเรือรบขนาดใหญ่ได้อย่างมีประสิทธิภาพ อย่างไรก็ตามในส่วนของกองทัพเรือเองก็ได้พยายามพัฒนาเพื่อก้าวให้เท่าทันเทคโนโลยี โดยพยายามยึดหลักพึ่งพาตนเองเป็นปัจจัยสำคัญ ทั้งนี้การดำเนินการจำเป็นต้องมีการพัฒนาองค์บุคคลและองค์ความรู้ ด้วยการศึกษาเทคโนโลยีใหม่ ๆควบคู่กันไปด้วย ดั่งคำอุปมาที่ว่า “หากเราหยุดอยู่กับที่ ก็เท่ากับถอยหลังเอง”ดังนั้นสิ่งสำคัญที่สุดก็คือ การหมั่นพัฒนาองค์บุคคลและองค์ความรู้ของกำลังพล อย่างต่อเนื่องและเป็นระบบเพื่อความก้าวหน้าของ กองทัพเรือสืบต่อไป
เอกสารอ้างอิง มนุษยชาติและเทคโนโลยีตอนที่๒ยานไร้คนขับ
นวัตกรรมสู่ชัยชนะ:พลเรือโททวีวุฒิพงศ์พิพัฒน์,๒๕๕๔มนุษยชาติและเทคโนโลยีตอนที่๓อากาศยาน
ไร้คนขับ:พลเรือโททวีวุฒิพงศ์พิพัฒน์,๒๕๕๔ โครงการวิจัยและพัฒนาเรือไร้คนขับบังคับด้วย
วิทยุสนับสนุนการตรวจค้นระยะที่๑:สวพ.ทร. โครงการวิจัยและพัฒนาเรือไร้คนขับบังคับด้วย
วิทยุสนับสนุนการตรวจค้นระยะที่๒:สวพ.ทร. http://gcaptain.com/forget-uavs-usvs-
option?32770;วันที่๒๙กันยายน๒๕๕๔USVTechnologyAndEngineering Issues
:THENAVYUNMANNEDSURFACEVEHICLE(USV)MASTERPLAN;23July2007UnmannedSurfaceVehicles–ASurvey
:VolkerBertram;23July2007
คำถามชิงรางวัลเสื้อโปโลราชนาวิกสภาจำนวน๕รางวัล
ท่านทราบหรือไม่ว่ายานผิวน้ำไร้คนขับของกองทัพเรือปัจจุบันอยู่ในการพัฒนาระยะที่เท่าไร และจะเสร็จสิ้นในปีพ.ศ.ใด ส่งคำตอบมาที่กองบรรณาธิการนาวิกศาสตร์หรืออีเมลล์มาที่[email protected]ภายใน๓๑มกราคมพ.ศ.๒๕๕๕
019





























