Embed Size (px)
Citation preview
ISSN 2354-0575
Khoa học & Công nghệ - Số 29/Tháng 3 - 2021 Journal of Science and Technology 103
THIẾT KẾ BỘ ĐIỀU KHIỂN TỐI ƯU H∞ CHO HỆ MÁY BAY KHÔNG NGƯỜI LÁI (UAV) ỨNG DỤNG TRONG PHÁT HIỆN CHÁY RỪNG
Lê Duy Tùng, Đỗ Trọng Tấn*, Nguyễn Văn ĐưaTrung tâm Công nghệ Vi điện tử và Tin học, viện Ứng dụng Công nghệ
* Tác giả liên hệ: [email protected]
Ngày tòa soạn nhận được bài báo: 03/09/2020Ngày phản biện đánh giá và sửa chữa: 02/12/2020Ngày bài báo được duyệt đăng: 25/03/2021
Tóm tắt:Với sự phát triển mạnh mẽ về công nghệ, các thiết bị bay không người lái đang được ứng dụng ngày
càng rộng rãi, hỗ trợ con người làm việc, hoạt động tại các môi trường nguy hiểm,… Cùng với đó là yêu cầu về các thuật toán điều khiển ngày càng tinh vi hơn, để hỗ trợ các thiết bị này thực hiện chính xác nhiệm vụ được giao. Bài báo trình bày về phương pháp thiết kế bộ điều khiển tối ưu, kết hợp bám quỹ đạo cho thiết bị bay không người lái phục vụ cho việc phát hiện cháy rừng. Các kết quả tính toán được tiến hành mô phỏng trên Matlab và đạt được các kết quả tốt.Từ khóa: Thiết bị bay không người lái, điều khiển tối ưu.
1. Đặt vấn đềTrong hai thập kỷ qua, ngoại trừ trong ngành
năng lượng chưa có nhiều đột phá, về phần cứng như: các thiết bị cảm biến và vi xử lý có tốc độ, độ chính xác ngày càng cao trong khi giá thành giảm, công nghệ viễn thông và định vị cực kỳ phát triển và đã ứng dụng vào dân sự như truyền dữ liệu tốc độ cao & GPS, công nghệ chế tạo phôi với thành công tiêu biểu là dân sự hóa máy in 3D, giá đang ở mức hợp lý và đang giảm đã khiến cho việc đưa UAV vào áp dụng thực tế chỉ còn bước thiết kế bộ điều khiển & lập trình. Cũng chính vì điều này, một lượng lớn các nghiên cứu về điều khiển UAV được công bố, tập trung chủ yếu vào việc giữ thăng bằng ổn định trên không và chuyển động tới điểm mong muốn. Các kỹ thuật điều khiển tiêu biểu có thể kể đến: Các bộ điều khiển phản hồi đơn giản như PD, PID [1], điều khiển trượt [2], điều khiển dự báo [3], [4], điều khiển thích nghi bền vững [5], [6], hoặc các bộ điều khiển LQR cho mô hình đã được tuyến tính hóa [7],…. Đặc điểm các bộ điều khiển này là dễ dàng áp dụng vào thực tế nhưng chất lượng có thể không tốt do nhiễu ngoại lực và nhiễu bất định. Các bộ điều khiển nâng cao sử dụng lý thuyết ổn định Lyapunov và điều khiển trượt kết hợp back-stepping nhằm giúp hệ kín ổn định tiệm cận [8]. Đặc điểm của những bộ điều khiển loại này là có thể đạt tới điểm đặt, có tính bền vững (với điều khiển trượt) nhưng yêu cầu tính toán cao trong thiết kế và áp dụng thực tiễn. Các bộ điều khiển nâng cao sử dụng điều khiển thích nghi bền vững nhằm nâng cao khả năng chịu nhiễu của UAV như tác động của gió, ngoại lực khác,.... Các bộ điều khiển khác sử dụng lý thuyết Điều khiển mờ, Mạng nơron hay Trí thông minh nhân tạo (AI) [9]. Các phương pháp điều khiển đều đã đạt được kết quả ổn định.
Trong bài báo này, chúng tôi nghiên cứu bộ điều khiển tối ưu H∞ cho dòng UAV quadrotor nhằm đảm bảo sự ổn định và bám theo quỹ đạo đã thiết
kế. Bên cạnh đó, đối với UAV loại nhỏ (miniature) có nội lực tác động lên quadrotor là khá nhỏ so với lực do tín hiệu điều khiển tác động, do vậy trong mô hình động học của UAV loại nhỏ hoàn toàn có thể không xét tới sự thiếu hụt cơ cấu chấp hành mà bộ điều khiển thiết kế trên mô hình đó vẫn đảm bảo chất lượng động học. Nội dung nghiên cứu được trình bày dưới đây và được thể hiện qua các kết quả mô phỏng đáng tin cậy.
2. Nội dung nghiên cứu2.1. Xây dựng mô hình UAV
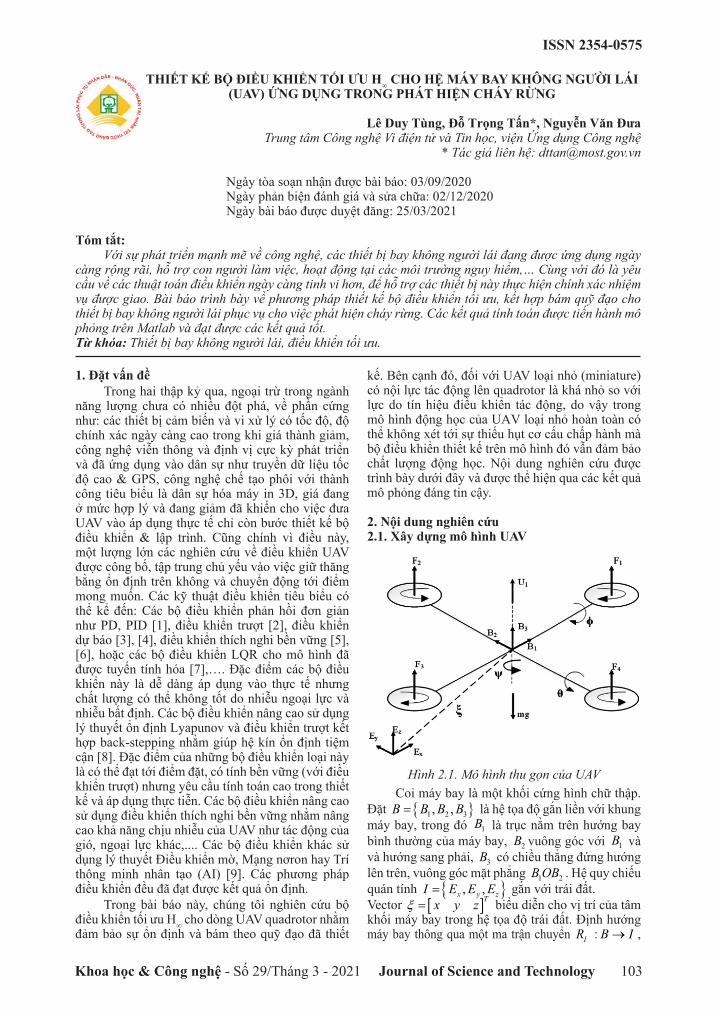
Hình 2.1. Mô hình thu gọn của UAVCoi máy bay là một khối cứng hình chữ thập.
Đặt 1 2 3, ,B B B B= là hệ tọa độ gắn liền với khung máy bay, trong đó 1B là trục nằm trên hướng bay bình thường của máy bay, 2B vuông góc với 1B và và hướng sang phải, 3B có chiều thẳng đứng hướng lên trên, vuông góc mặt phẳng 1 2B OB . Hệ quy chiếu quán tính , ,x y zI E E E= gắn với trái đất.Vector [ ]Tx y zξ = biểu diễn cho vị trí của tâm khối máy bay trong hệ tọa độ trái đất. Định hướng máy bay thông qua một ma trận chuyển IR : B I→ ,

ISSN 2354-0575
Journal of Science and Technology104 Khoa học & Công nghệ - Số 29/Tháng 3 - 2021
với (3)IR SO∈ là một ma trận trực giao. Ma trận chuyển có thể thu được thông qua ba phép quay liên tiếp quanh ba trục của hệ tọa độ máy bay. Trong bài báo này, các góc Euler XYZ cố định được sử dụng để mô tả sự quay của UAV đối với mặt đất. Các góc này cần thỏa mãn điều kiện:
Góc roll, φ : 2 2π πφ − < <
Góc pitch, θ : 2 2π πθ − < <
Góc yaw, ψ : ( )π ψ π− < <Từ ba phép quay trên, ma trận chuyển hệ tọa độ từ B I→ là: 11 12 13
21 22 23
31 32 33
I
R R RR R R R
R R R
=
(1)
Với:11
12
13
21
22
23
31
32
33
cos coscos sin sin sin coscos sin cos sin sinsin cossin sin sin cos cossin sin cos cos sin
sincos sincos cos
RRRRRRRRR
ψ θψ θ ϕ ψ φψ θ φ ψ φψ θψ θ φ ψ φψ θ φ ψ φθθ φθ φ
== −= +== += −= −==
Phương trình động học của chuyển động quay và tịnh tiến có được bằng ma trận chuyển. Động học tịnh tiến có thể được viết như sau:
.I I Bv R v= (2)Với [ ]0 0 0w T
Iv u v= và [ ]w TB L L Lv u v=
các vận tốc tuyến tính của tâm khối máy bay biểu diễn trong hệ tọa độ trái đất và hệ tọa độ máy bay.Các động học quay có được như sau: 1Wηη ω−= (3)
1 sin tan cos tan0 cos sin0 sin sec cos sec
pqr
φ φ θ φ θθ φ φψ φ θ φ θ
= −
Trong đó [ ]Tη φ θ ψ= và [ ]Tp q rω = là các vận tốc góc trong hệ tọa độ máy bay.Các phương trình động học máy bay có thể được biểu diễn bằng công thức Euler - Lagrange dựa trên động năng và thế năng:
i i
f d L Ldt q q
ξ
ητ ∂ ∂
= − ∂ ∂
(4)
( , ) Ctrans Crot pL q q E E E= + − (5)Trong đó: L là hàm Lagrange của mô hình máy bay
CtransE là động năng chuyển động tịnh tiến
CrotE là động năng chuyển động quaypE là tổng thế năng[ ] 6Tq ξ η′ ′= ∈ℜ là vector các tọa độ
3ητ ∈ℜ biểu diễn các mômen roll, pitch, yaw
ˆI Tf R fξ α= + là lực tịnh tiến đặt lên máy bay
do đầu vào điều khiển chính 1U hướng trục z với 3
21
ˆI IeR f R U= .T x y zA A Aα = là các vector lực khí động
học, có thành phần trên các trục , ,x y zE E E . Các lực khí động học được coi như là nhiễu loạn bên ngoài.Do hàm Lagrange không chứa các thành phần động năng có sự kết hợp của η và ξ , nên phương trình Euler - Lagrange có thể được chia thành 2 phần là động học tịnh tiến và động học quay. Chuyển động tịnh tiến có thể được biểu diễn bởi phương trình sau: 3m mge fξξ + = (6)Phương trình (5) có thể biểu diễn bằng vector trạng thái ξ :
( )
( )
( )
1
1
1
1 cos sin cos sin sin
1 sin sin cos cos sin
1 cos cos
x
y
z
Ax U
m mA
y Um m
Az g Um m
ψ θ φ ψ φ
ψ θ φ ψ φ
θ φ
= + + = − +
= − + +
(7)
Trong đó: m là khối lượng máy bay và g là gia tốc trọng trường. Phương trình động năng quay biểu diễn các chuyển động quay là hàm của η . Đặt Wη là ma trận Jacobian từ ω sang η trong (2), ta có: ( ) W JWη ηη ′ℑ = ℑ = (8)Trong đó: J là momen quán tính. Phương trình động năng quay: 1
2CrotE η η′= ℑ
(9)
Từ biểu diễn trên, phương trình chuyển động quay Euler-Lagrange theo η có thể viết như sau: ( ) ( , )M C ηη η η η η τ+ = (10)Với: ( ) ( )M η η= ℑ :
11 12 13
21 22 23
31 32 33
( )M M M
M M M MM M M
η =
Trong đó:
( )
( )
11
12
13
212 2
22
23
31
32
2 2 2 2 233
0sin
0cos sin
cos sin cos
sin
cos sin cos
sin sin cos cos cos
xx
xx
yy zz
yy zz
xx
yy zz
xx yy zz
M IMM IMM I I
M I I
M I
M I I
M I I I
θ
φ φ
φ φ θ
θ
φ φ θ
φ φ θ φ θ
=== −== +
= −
= −
= −
= + +
ISSN 2354-0575
Khoa học & Công nghệ - Số 29/Tháng 3 - 2021 Journal of Science and Technology 105
và:
11 12 13
21 22 23
31 32 33
( , )C C C
C C C CC C C
η η =
Trong đó:11
212
2
213
221
2
22
23
0
( )( cos sin sin cos )
( ) cos cos cos
( ) cos sin cos
( )( cos sin sin cos )
( ) cos cos cos
( ) cos sin
yy zz
zz yy xx
zz xx
zz yy
yy zz xx
zz yy
xx
C
C I I
I I I
C I I
C I I
I I I
C I I
C I
θ φ φ ψ φ θ
ψ φ θ ψ θ
ψ φ φ θ
θ φ φ ψ φ θ
ψ φ θ ψ θ
φ φ φ
=
= − +
+ − −
= −
= − +
+ − +
= −
= −
2
2
sin cos sin cos sin
cos cos sinyy
zz
I
I
ψ θ θ ψ φ θ θ
ψ φ θ θ
+
+
231 ( ) cos cos sin cosyy zz xxC I I Iψ θ φ φ θ θ= − −
232
2
2 2
( )( cos sin sin sin cos )
( ) cos cos sin cos
sin sin cos cos cos sin
zz yy
yy zz xx
yy zz
C I I
I I I
I I
θ φ φ θ φ φ θ
φ φ θ ψ θ θ
ψ φ θ θ ψ φ θ θ
= − +
+ − +
− −
2 233
2
( ) cos sin cos sin cos sin
cos cos sin cos sinyy zz yy
zz xx
C I I I
I I
φ φ φ θ θ φ θ θ
θ φ θ θ θ θ θ
= − −
− +
Do đó, mô hình toán học (sử dụng cho tổng hợp bộ điều khiển) mô tả chuyển động quay của quadrotor thông qua phương trình Euler - Lagrange là [9]:
( )1( ) ( , )M Cηη η τ η η η−= − (11)
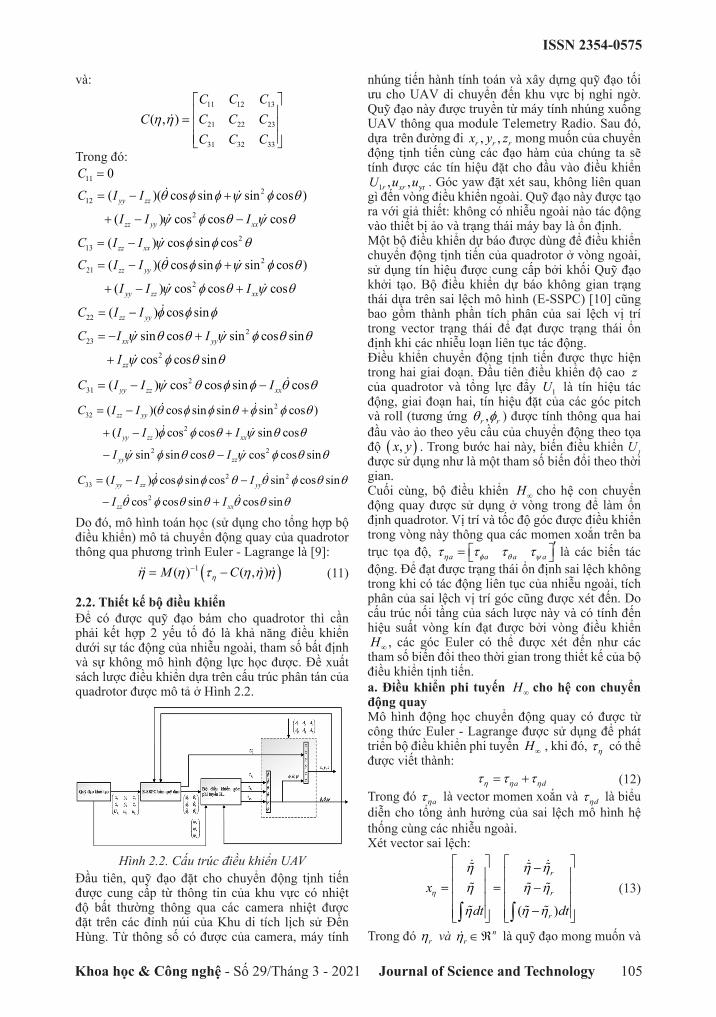
2.2. Thiết kế bộ điều khiểnĐể có được quỹ đạo bám cho quadrotor thì cần phải kết hợp 2 yếu tố đó là khả năng điều khiển dưới sự tác động của nhiễu ngoài, tham số bất định và sự không mô hình động lực học được. Đề xuất sách lược điều khiển dựa trên cấu trúc phân tán của quadrotor được mô tả ở Hình 2.2.
Hình 2.2. Cấu trúc điều khiển UAVĐầu tiên, quỹ đạo đặt cho chuyển động tịnh tiến được cung cấp từ thông tin của khu vực có nhiệt độ bất thường thông qua các camera nhiệt được đặt trên các đỉnh núi của Khu di tích lịch sử Đền Hùng. Từ thông số có được của camera, máy tính
nhúng tiến hành tính toán và xây dựng quỹ đạo tối ưu cho UAV di chuyển đến khu vực bị nghi ngờ. Quỹ đạo này được truyền từ máy tính nhúng xuống UAV thông qua module Telemetry Radio. Sau đó, dựa trên đường đi , ,r r rx y z mong muốn của chuyển động tịnh tiến cùng các đạo hàm của chúng ta sẽ tính được các tín hiệu đặt cho đầu vào điều khiển
1 yr, ,r xrU u u . Góc yaw đặt xét sau, không liên quan gì đến vòng điều khiển ngoài. Quỹ đạo này được tạo ra với giả thiết: không có nhiễu ngoài nào tác động vào thiết bị ảo và trạng thái máy bay là ổn định. Một bộ điều khiển dự báo được dùng để điều khiển chuyển động tịnh tiến của quadrotor ở vòng ngoài, sử dụng tín hiệu được cung cấp bởi khối Quỹ đạo khởi tạo. Bộ điều khiển dự báo không gian trạng thái dựa trên sai lệch mô hình (E-SSPC) [10] cũng bao gồm thành phần tích phân của sai lệch vị trí trong vector trạng thái để đạt được trạng thái ổn định khi các nhiễu loạn liên tục tác động.Điều khiển chuyển động tịnh tiến được thực hiện trong hai giai đoạn. Đầu tiên điều khiển độ cao zcủa quadrotor và tổng lực đẩy 1U là tín hiệu tác động, giai đoạn hai, tín hiệu đặt của các góc pitch và roll (tương ứng ,r rθ φ ) được tính thông qua hai đầu vào ảo theo yêu cầu của chuyển động theo tọa độ ( ),x y . Trong bước hai này, biến điều khiển U1 được sử dụng như là một tham số biến đổi theo thời gian.Cuối cùng, bộ điều khiển H∞ cho hệ con chuyển động quay được sử dụng ở vòng trong để làm ổn định quadrotor. Vị trí và tốc độ góc được điều khiển trong vòng này thông qua các momen xoắn trên ba trục tọa độ, a a a aη φ θ ψτ τ τ τ ′ = là các biến tác động. Để đạt được trạng thái ổn định sai lệch không trong khi có tác động liên tục của nhiễu ngoài, tích phân của sai lệch vị trí góc cũng được xét đến. Do cấu trúc nối tầng của sách lược này và có tính đến hiệu suất vòng kín đạt được bởi vòng điều khiển H∞ , các góc Euler có thể được xét đến như các tham số biến đổi theo thời gian trong thiết kế của bộ điều khiển tịnh tiến.a. Điều khiển phi tuyến H∞ cho hệ con chuyển động quay Mô hình động học chuyển động quay có được từ công thức Euler - Lagrange được sử dụng để phát triển bộ điều khiển phi tuyến H∞ , khi đó, ητ có thể được viết thành: a dη η ητ τ τ= + (12)Trong đó aητ là vector momen xoắn và dητ là biểu diễn cho tổng ảnh hưởng của sai lệch mô hình hệ thống cùng các nhiễu ngoài.Xét vector sai lệch:
( )
r
r
r
x
dt dtη
η η ηη η η
η η η
− = = −
− ∫ ∫
(13)
Trong đó rη và n
rη ∈ℜ là quỹ đạo mong muốn và

ISSN 2354-0575
Journal of Science and Technology106 Khoa học & Công nghệ - Số 29/Tháng 3 - 2021
vận tốc tương ứng, để ý rằng một thành phần tích phân đã được thêm vào trong vector sai lệch. Thành phần này sẽ cho phép đạt được trạng thái ổn định sai lệch không khi các thành phần nhiễu tác động liên tục lên hệ thống.Ta xem xét cấu trúc điều khiển sau cho hệ con chuyển động quay [4]:
( )1 11 1( ) ( , ) ( ) ( , )a M C T M Tx C Tx T uη η ητ η η η η η η η η− −= + − + +
(14)Ta thấy aητ có thể được chia làm 3 phần: phần thứ nhất bao gồm hai biểu thức đầu, là phần động học của hệ thống. Phần thứ hai có 2 thành phần chứa vector sai lệch xη và đạo hàm của nó xη . Giả sử
0dητ ≡ thì hai thành phần này của luật điều khiển cho phép bám quỹ đạo đạo đặt 1 cách hoàn hảo. Cuối cùng, phần thứ 3 gồm một vector u, biểu diễn cho điều khiển để loại bỏ nhiễu.Ma trận T có thể được viết thành:
[ ]1 2 3T T T T=trong đó, 1T Iρ= , với ρ là dương, vô hướng và I là ma trận đơn vị bậc n.Thay luật điều khiển (13) vào (11) và kí hiệu
11( ) ( ) dd M T M ηη η τ−= , ta được:
( ) ( , )M Tx C Tx u dη ηη η η+ = + (15)Công thức trên biểu diễn cho phương trình động học của sai lệch hệ thống. Nhìn vào phương trình phi tuyến này, vấn đề điều khiển phi tuyến H∞ có thể được đặt ra như sau:“Tìm một luật điều khiển ( )u t mà tỷ lệ giữa năng lượng của biến chi phí W ( )
TT Th x uηζ = và năng lượng của các tín hiệu nhiễu d nhỏ hơn mức độ suy giảm γ cho trước”.Từ việc xem xét ma trận W, ta xét cấu trúc cho ma trận Q và S:
1 12 13
12 2 23
13 23 3
Q Q QQ Q Q Q
Q Q Q
=
, 1
2
3
SS S
S
=
Để áp dụng các kết quả lý thuyết, ta cần viết lại phương trình động học phi tuyến của sai lệch theo mẫu tiêu chuẩn của điều khiển phi tuyến H∞ thành dạng sau: ( , ) ( , ) ( , )x f x t g x t u k x t dη η η η= + + (16)Trong đó:
1
1 1 1 10 1 1 2 1 2 3 0
( ) ( , ) 0 0( , ) ( )
0
M Cf x t T T I T T I T T T T x
I Iη η
η η η−
− − − −
− = − − + − −
1
10
( )( , ) ( , ) 0
0
Mg x t k x t Tη η
η −
−
= =
với:
1 2 3
0 00 0
T T TT I I
I
=
(17)
Như đã nói ở trên, nghiệm của phương trình HJB [10] phụ thuộc vào việc lựa chọn hàm chi phí ζ mà cụ thể là lựa chọn hàm ( )h xη . Ở đây, ta chọn
( )h x xη η= . Sau đó, việc tính toán luật điều khiển u sẽ yêu cầu chọn hàm Lyapunov ( ),V x tη .Định lý sau sẽ giúp ta thực hiện điều này:Định lý: Cho hàm vô hướng ( ),V x tη :
0 0
( ) 0 01( , ) 02
0
T T
MV x t x T Y X Y T x
X Y Z Yη η η
η = − − +
(18)
Trong đó , , n nX Y Z ×∈ℜ là các ma trận hằng, đối xứng xác định dương sao cho 1 2 0Z XY X X−− + > và 0T được định nghĩa ở (16). T là ma trận trong (14). Nếu các ma trận này thỏa mãn:
12
2 22
1 ( ) ( ) 0T T T T
O Y XY X Z X QX Z X O
T T S T R S Tγ
−
+ + +
+ − + + =
(19)
Thì khi đó thì hàm ( ),V x tη ở (25) sẽ là 1 nghiệm của phương trình HJB với một giá trị của γ .Định lý này có được từ [2].Chứng minh: Xét hệ:
( ) ( , ) dM q q N q q τ τ+ = +
Với:( , ) ( , ) ( ) ( )N q q C q q q F q G q= + +
Trong đó nq R∈ là biến trạng thái, q là đạo hàm của nó. Giả sử 2 vector này đều có thể đo được. Vector τ là tín hiệu đầu vào của hệ thống, dτ biểu diễn tổng nhiễu và sai lệch hệ thống. Ma trận quán tính M(q) đối xứng, xác định dương, ( , )C q q q là vector hướng tâm và Coriolis, ( )F q biểu diễn ma sát và G(q) là trọng lực.Như ta đã biết thì ma trận ( , )C q q không phải là duy nhất nên để cho tiện, chúng ta có thể viết ( , )C q qthành:
1( , ) ( , ) ( , )2
C q q M q q N q q= +
Trong đó ( , )M q q
và ( , )N q q được tính:
ij ij1
nij ij
kk k
M MdM M q qdt q q=
∂ ∂= = =
∂ ∂∑
1
12
nijik
ij kk j i
MMN q
q q=
∂∂= − ∂ ∂ ∑
Xét hàm:
0 0
0 01( , ) 02
0
T T
MV x t x T Y X Y T x
X Y Z Y
= − − +
Hàm V(x,t) xác định dương khi và chỉ khi:

ISSN 2354-0575
Khoa học & Công nghệ - Số 29/Tháng 3 - 2021 Journal of Science and Technology 107
0 00 00
MY X Y
X Y Z Y
− > − +
Khi ma trận quán tính M đối xứng, xác định dương và giả thiết các ma trận *, , n nX Y Z R∈ là các ma trận hằng, đối xứng, xác định dương thì bất đẳng thức trên thỏa mãn khi và chỉ khi:
1( ) ( ) 0Z Y X Y Y X Y−+ − − − >Hay:
1 2 0Z XY X X−− + >chính là giả thiết.Tiếp theo, ta cũng thấy rằng ( ),V x t là 1 nghiệm cho phương trình Hamilton-Jacobi:
( ) 1
12
1
1, ( )( ) ( )2
1 1 ( , ) ( , ) ( , ) ( , )2
( , ) ( ) 0
TT T
TT T
T
V V f x t h x Q SR S h xt x
V k x t k x t g x t R g x tx
V g x t R S h xx
γ
−
−
−
∂ ∂+ + −
∂ ∂ ∂
+ − ∂ ∂
× =∂
Vector vi phân theo x của ( ),V x t :
[ ]0 1* 1*
0 0( , ) 10 0 0
20
TT T
n n
MV x t x T Y X Y T
xX Y Z Y
∂ = − + Ω ∂ − +
Trong đó 1*nRΩ∈ bằng:
1
0 0 0 0
0 00 0
0 0 0 ,...., 0 0 00 0 0 0 0 0
TT
nT T T T
MMqq
x T T x x T T x
∂∂ ∂∂
Dễ dàng thấy:
[ ][ ]1* 1*0 0 ( , ) ( , ) 0n n g x t u k x t ωΩ + =
Hệ quả là:
[ ]0 0 1* 1*
0 0( , ) 10 0 0
20
TT T
n n
MV x t f x T Y X Y T f
xX Y X Y
∂ = − + Ω ∂ − +
0 0 1* 1*
1* 1*
0 0 1* 1*
0 010 [0 0 ]2
01 [0 0 ]( )2
0 010 [0 0 ]2
0
T Tn n
n n
T Tn n
Mx T Y X Y T f f
X Y X Y
gu k
Mx T Y X Y T f x
X Y X Y
ω
= − + Ω − +
+ Ω +
= − + Ω − +
Thay vào ta có:
0 0 0
1
2 3 2 0
0 0 0 00 00 0
1( ) 0 021 1 1( ) ( )
0
T T T T
M Mx T Y X Y T f x T Y X Y
X Y X Y X Y X Y
M M N
I I T I T T T x
I Iρ ρ ρ
−
− = − − + − +
− + × − − − −
−
2 3 2 0
2 3 2
1( ) 0 02
1 1 1 ( )
1 1 1( ) ( ) ( ) ( )( )
T To
M N
x T X YT X Y T T T x
X Y X Z X Y T X Z X Y T T
γρ ρ ρ
ρ ρ ρ
− +
= − − − −
− + − − − + − − −
Và:
( )
1* 1* 1* 1*
1
0 0
1 1 1[0 0 ] [0 0 ]2 2 2
0 0
1 0 0 02
0 0 0
n n n n
Tn
k rkk k
T T
ex e e
e
M q qq
x T T x=
Ω = Ω = Ω
∂− ∂
=
∑
Đạo hàm ( ),V x t theo thời gian:
1
0 0
0 0
1 0 0 02
0 0 0
Tn
rkk k
T T
M qq
V x T T xt
=
∂ ∂ ∂ = ∂
∑
Thay vào biểu thức bên trên ta được:( , )TV V x t f
t x∂ ∂
+∂ ∂
0 0 1* 1*
0 010 [0 0 ]2
0
T Tn n
MV x T Y X Y T f xt
X Y Z Y
∂ = + − + Ω ∂ − +
0 0
1
0 0
0 000
0 0
1 0 0 02
0 0 0
T T
Tn
kk k
T T
Mx T Y X Y T f
X Y Z Y
M qq
x T T x=
= − − +
∂ ∂ +
∑

ISSN 2354-0575
Journal of Science and Technology108 Khoa học & Công nghệ - Số 29/Tháng 3 - 2021
0 2 3 2 0
2 3 2
0 01 1 1 ( )
1 1 1( ) ( ) ( ) ( )( )
T T
N
x T Y X YT X Y T T T x
X Y X Z X Y T X Z X Y T T
ρ ρ ρ
ρ ρ ρ
−
= − − − −
− + − − − + − − −
Tính toán thấy N là ma trận nghiêng đối xứng, và do cấu trúc đặc biệt của 0T , ta có :
0 0
0 00 0 0 00 0 0
T T
Nx T T x
− =
Thay phương trình trên ta được:( , )TV V x t f
t x∂ ∂
+∂ ∂
0 2 3 2 0
2 3 2
0 01 1 1 ( )
1 1 1( ) ( ) ( ) ( )( )
T T
N
x T Y X YT X Y T T T x
X Y X Z X Y T X Z X Y T T
ρ ρ ρ
ρ ρ ρ
−
= − − − −
− + − − − + − − −
0 0 0 01 0 0 22
2 0 0 0 0
01 22
2 0
T
T
Y Xx Y X X X Z x
X X Z
Y Xx Y X Z X x
X X Z
= + + + = + +
Biểu thức ( , )( , )T V x tg x tx
∂∂
được tính bởi:
1 10 0 0
0
0 0( , )( , ) [ 0 0](T ) 0
0[I 0 0]T
T T T
MV x tg x t M T Y X Y T x
xX Y Z Y
x Tx
− −
∂ = − ∂ − +
= =Thêm vào đó, ta có ( ) ( ), ,g x t k x t= nên:
12
12
1 1 ( , ) ( , ) ( , ) ( , )2
1 12
TT T
T T
V Vk x t k x t g x t R g x tx x
x T I R Tx
γ
γ
−
−
∂ ∂− ∂ ∂
= −
Cuối cùng, thay thế biểu thức đã tính được ở trên vào phương trình Hamilton-Jacobi ở đầu với điều kiện ( )h x x= , ta được:
12
1 1
01 1 122 2
2 01 ( ) 02
T T T
T T T T T
Y Xx Y X Z X x x T I R Tx
X X Z
x T R S x x Q SR S x
γ−
− −
+ + − +
− + − =
Đơn giản hóa biểu thức này, ta có được điều phải
chứng minh. Trở lại với bài toán quadrotor:Ma trận [ ]1 2 3T T T T= được tính bằng cách giải một số phương trình toán học Riccati sau:Tính 1T :
1 1 1 11 1 1 1 1 1 1 1 12
1( ) 0T T T TT I R T S R T T R S S R S Qγ
− − − −− − − − + =
Tính 3T : 1 1 1 1
3 3 3 3 3 3 3 3 32
1( ) 0T T T TT I R T S R T T R S S R S Qγ
− − − −− − − − + =
Tính X:1 1 1 1
1 3 1 3 1 3 1 3 132
1T T T TX T R T S R T T R S S R S Qγ
− − − − = − − − − − +
Tính 2T :
1 1 1 12 2 2 2 2 2 2 2 22
1 2 0T T T TT I R T S R T T R S S R S Q Xγ
− − − − − − − − + + =
Thay ( ),V x tη vào (14), luật điều khiển u* tương ứng với chỉ số tối ưu H∞ , γ là: * 1( )u R S T xη
− ′= − + (20)Cuối cùng, thay luật điều khiển trên vào (17), cùng với một vài biến đổi, luật điều khiển tối ưu trở thành:
( )( )* ( ) ( , )a r D P IM C M K K K dtητ η η η η η η η η η= + − + − ∫
(21)Trong đó:
1 1 1 11 2 1 1 1
1 1 1 11 3 2 2 2
1 1 1 11 3 3 3
( ( ) ( , ) ( ) ( ))( ( ) ( , ) ( ) ( ))
( ( ) ( , ) ( ) ( ))
D
P
I
K T T M C T M R S TK T T M C T M R S T
K T M C T M R S T
η η η η
η η η η
η η η η
− − − −
− − − −
− − − −
′= + + +
′= + + +
′= + +
Trường hợp đặc biệt khi các thành phần của W’W thỏa mãn:
2 2 2 21 1 2 2 3 3
12 13 23 1 2 3
, , , ,,
uQ I Q I Q I R IQ Q Q O S S S O
ω ω ω ω= = = == = = = = =
(22)
Khi đó:22 1 3 1
21
2 1( ) ( , )Du
K I M C Iω ωω
η η ηω ω
−+ = + +
22 1 3 13
21 1
132
1
2 1( ) ( , )
1( ) ( , )
Pu
Iu
K I M C I
K M C I
ω ωωωη η η
ω ω ω
ωη η η
ω ω
−
−
+ = + +
= +
Trong đó, các tham số 1 2 3, ,ω ω ω và uω có thể được chỉnh định.Các biểu thức này có một đặc điểm quan trọng: chúng không phụ thuộc vào tham số γ , vậy nên chúng ta có thể có được một biểu thức đại số để tính toán giải pháp tối ưu cho trường hợp cụ thể này. Bài mô phỏng bên dưới đây của chúng em sẽ mô phỏng cho trường hợp này.b. E-SSPC cho bám quỹ đạoTrong phần này, luật điều khiển được thiết kế để giải quyết vấn đề bám quỹ đạo đặt. Xét một không gian trạng thái MPC tuyến tính dựa trên sai lệch mô hình
ISSN 2354-0575
Khoa học & Công nghệ - Số 29/Tháng 3 - 2021 Journal of Science and Technology 109
(E-SSPC), từ sai lệch mô hình, hai bộ điều khiển dự báo được tổng hợp. Bộ thứ nhất điều khiển độ cao thông qua U1 còn bộ thứ hai sử dụng tín hiệu này tạo ra một tham số theo thời gian trong các chuyển động tuyến tính theo trục x và y để tính hai đầu vào ảo ,x yu u .Ta viết lại (7) trong không gian trạng thái theo mẫu:
( ) ( ( ), ( ))t f t u tξξ ξ=
để thiết kế bộ điều khiển, với [ ]0 0 0( ) ( ) ( ) ( ) ( ) ( ) w ( ) Tt x t u t y t v t z t tξ = là
vector không gian trạng thái của hệ, u0(t), v0(t), w0(t) là các thành phần cấu thành nên vận tốc tuyến tính của tâm quadrotor trong biểu diễn hệ tọa độ nội.Từ (7) và vector không gian trạng thái mới, phương trình động học của hệ dùng để thiết kế điều khiển có thể được viết thành:
0
1
1
0
1
( ) ( ( ), ( ))
( )( )( )( )
( )( )( )( )
w ( )( ) ( )(cos ( ) cos ( ))
xx
o
yy
z
t f t u t
u tA tU tu t
m mv t
A tU tu tm m
tU t A tg t t
m m
ξξ ξ
θ φ
=
+
= +
− + +
(23)
Với:( ) cos ( )sin ( ) cos ( ) sin ( )sin ( )( ) sin ( )sin ( ) cos ( ) cos ( )sin ( )
x
y
u t t t t t tu t t t t t t
ψ θ φ ψ φ
ψ θ φ ψ φ
+
−
(24)
Phương trình (7) cho thấy rằng chuyển động thông qua các trục x và y phụ thuộc vào đầu vào điều khiển U1. Thực tế thì U1 là độ lớn tổng lực đẩy được thiết kế để đạt được chuyển động tuyến tính mong muốn, trong khi ,x yu u có thể được xem như là các hướng của U1 gây ra các chuyển động theo các trục x và y.Mục tiêu của cách tiếp cận này là đảm bảo rằng UAV bám theo một quỹ đạo đặt định trước và giảm thiều tối đa sai lệch. Tuy nhiên, do thực tế các tọa độ đặt thay đổi theo thời gian nên ta cần một thiết bị ảo có mô hình giống với quadrotor: ( ( ), ( ))r r rf t u tξξ ξ= (25)Trong đó:
[ ]0 0 0( ) ( ) ( ) ( ) ( ) ( ) w ( )r r r r r r rt x t u t y t v t z t tξ ′=Và
yr 1( )r xr ru t u u Uξ′ =
là các trạng thái đặt và đầu vào điều khiển tương ứng. Giả thiết không có các nhiễu ngoài trong thiết bị ảo. Thiết bị ảo này giúp ta có được các đầu vào điều khiển đặt cho các chuyển động tịnh tiến với giả thiết rằng độ cao của quadrotor đã ổn định. Do đó, trong trường hợp này, các giá trị đặt là:
( )1 .r rU m z g= +
1 1
. ., r r
r r
r rx y
x m y mu uU U
= =
Bằng cách trừ các tham chiếu ảo (24) cho (22) ta có sai lệch mô hình của chuyển động tịnh tiến như sau:
( ) ( ). ( ) ( ). ( )t A t t B t u tξξ ξ= +
(26)
Trong đó, ( ) ( ) ( )rt t tξ ξ ξ= −
là vector sai lệch và ( ) ( ) ( )ru t u t u tξ ξ ξ= − là sai lêch đầu vào điều khiển.
Các ma trận A(t) và B(t) là các ma trận Jacobi của hệ thống (22). Hơn nữa, thành phần tích phân của sai lệch vị trí cũng đã được gộp vào trong vector sai lệch để thực hiện bám quỹ đạo khi bị tác động liên tục của các nhiễu loạn.Xét vector sai lệch:
0 0 0
0 0 0
0 0 0
( ) ( ) ( )( ) ( ) ( )
( ) ( ( ) ( ))
( ) ( ) ( )( ) ( ) ( )( )
( ) ( ( ) ( ))
( ) ( ) ( )w ( ) w ( ) w ( )
( ) ( ( )
r
r
r
r
r
r
r
r
r
x t x t x tu t u t u t
x t dt x t x t dt
y t y t y tv t v t v tx ty t dt y t y t dt
z t z t z tt t t
z t dt x t z
ξ
− − − −
− = = − − −
−
∫ ∫
∫ ∫
∫
( ))t dt
∫
(27)
Sử dụng phương pháp Euler, ta có mô hình tuyến tính rời rạc theo thời gian: ( 1) . ( ) ( ). ( )x k A x k B k u kξ ξ ξ+ = + (28) Đầu vào điều khiển 1( )U t được xem như là một tham số phụ thuộc thời gian cho chuyển động đặt theo x và y. Hơn nữa, do cấu trúc điều khiển phân cấp, các góc roll, pitch và yaw cũng được coi là các tham số phụ thuộc thời gian.Sai lệch mô hình (25) có thể được chia thành hai hệ con: sai lệch cao độ và sai lệch chuyển động theo x và y. Các ma trận ,A B cho mỗi hệ con biểu diễn như sau:
01 00 1 0 , cos ( ) cos ( )
0 1 0
z z
ttA B k k
mt
θ φ
∆ ∆ = = ∆
(29)
1
1
0 01 0 0 0 0
( ) 00 1 0 0 0 00 1 0 0 0 0 0
,0 0 0 1 0 0 00 0 0 0 1 0 0 ( )0 0 0 0 1
0 0
xy xy
t t U km
tA B
tt U k
mt
∆ ∆ ∆ = =
∆ ∆ ∆
(30)
ISSN 2354-0575
Journal of Science and Technology110 Khoa học & Công nghệ - Số 29/Tháng 3 - 2021
Với t∆ là thời gian lấy mẫu được chọn đủ nhỏ để có thể giữ lại được tất cả sai lệch của chuyện động tịnh tiến nhưng cũng phải đủ lớn để chuyển động quay ở trạng thái ổn định.Dựa trên những phân tích này, vấn đề bám quỹ đạo cho UAV có thể được hiểu là: tìm các đầu vào điều khiển trong khoảng giá trị giới hạn có thể để điều khiển các biến trạng thái trong (25) từ một vị trí đầu
0xξ đến gốc tọa độ. Cho nên, từ sai lệch độ cao và di chuyển ngang, các luật điều khiển được thiết kế để khiến cho hệ buộc phải bám theo quỹ đạo đặt.Luật điều khiển đầu tiên tính toán đầu vào 1U sao cho hàm chi phí sau nhỏ nhất:
( )2 2
ˆ ˆ ˆ ˆˆ ˆ ˆ ˆ
ˆ ˆ( | ) ( | )
TT
z z rz z z rz z rz z z rz
z z rz z
J x x Q x x u u R u u
x k N k x k N k
ξ ξ ξ ξ ξ ξ ξ ξ
ξ ξ
= − − + − − +Ω + − +
(31)Trong đó, các ma trận khối lượng ,z zQ R là các ma trận đường chéo, xác định dương, 2zN là cửa sổ dự báo và Ω là chi phí trạng thái cuối:
( )2 2
2 2
2 2
ˆ ˆ( | ) ( | )
ˆ ˆ( | ) ( | )
ˆ ˆ( | ) ( | )
z z rz z
T
z z rz z
z z z rz z
x k N k x k N k
x k N k x k N k
P x k N k x k N k
ξ ξ
ξ ξ
ξ ξ
Ω + − +
= + − + × + − +
Với 0zP ≥ .Các dự báo của đầu ra mô hình ˆ ( | )zx k j kξ + được tính bằng cách tuyến tính hóa mô hình không gian trạng thái theo thời gian của quadrotor bởi các phương trình (25) và (26), ta được:
ˆˆ ( | ). ( | ) ( | ).z z z z zx P k k x k k H k k uξ ξ ξ= + (32)
Trong đó 1 1( | ) ( ) ( )z ru k k U k U kξ = − và ( )zx kξ là vector trạng thái sai lệch độ cao. Các vector độ cao đặt là:
2
1 1
1 1
( 1 | ) ( | )ˆ
( 1 | ) ( | )
( | ) ( 1 | )ˆ
( 1 | ) ( 1 | )
rz rz
rz
rz z rz
r r
rz
r uz r
x k k x k kx
x k N k x k k
U k k U k ku
U k N k U k k
ξ ξ
ξ
ξ ξ
ξ
+ − + − −
− − + − − −
Trong đó uzN là cửa sổ điều khiểnKhi không xét đến các ràng buộc, luật điều khiển có thể được viết như sau:
1ˆ ˆˆ. ( ( ))T Tz z z z z z z rz z z z rzu H Q H R H Q x P x k R uξ ξ ξ ξ
− = + − + (33)Mặc dù chỉ mỗi ˆ ( | )zu k kξ là cần giá trị tức thời của k. Do đó, tín hiệu điều khiển cho quadrotor như sau:
1 1ˆ( ) ( | ) ( )z rU k u k k U kξ= +
Luật điều khiển thứ hai tính các đầu vào điều khiển theo các trục x và y. Nếu giống như các thủ thuật trước đó bằng cách sử dụng sai lệch mô hình (25) và (27), tín hiệu điều khiển ta có được là:
( )
1ˆ
ˆˆ ( )
Txy xy xy xy xy
Txy xy rxy xy xy xy rxy
u H Q H R
H Q x P x k R u
ξ
ξ ξ ξ
− = +
× − +
(34)
Trong đó:ˆ ( | ) ( | ) ( | )
T
xy x yu k k u k k u k kξ =
và ˆ( ) ( ) ( | )xy rxy xyu k u k u k kξ ξ ξ= + (35) Các vector đặt của các sai lệch trạng thái ˆ rxyxξ và các sai lệch đầu vào điều khiển ˆ rxyuξ có được bằng cách giống với trường hợp bộ điều khiển độ cao.Kết quả là, vector các hướng mong muốn ảo,
( )T
xy x yu k u uξ = :( ) cos ( )sin ( ) cos ( ) sin ( )sin ( )( ) sin ( )sin ( ) cos ( ) cos ( )sin ( )
x r r r
y r r r
u t t t t t tu t t t t t t
ψ θ φ ψ φψ θ φ ψ φ
= += −
(36)
Nếu ( )xyu kξ được thay thế bởi các giá trị mong muốn trong (32), ta có biễu diễn: ( ) ( | ) ( )
( ) ( | ) ( )x x xr
y y yr
u k u k k u ku k u k k u k
= +
(37)
Một khi các đầu vào ảo đã được tính, giá trị đặt của các góc roll và pitch, ,r rφ θ được sử dụng ở phương trình (33). 3. Mô phỏngCác mô phỏng được thực hiện trên phần mềm Matlab. Thông số của quadrotor như sau:
2
2 2
0,740,219,81 /
0,004 , 0,0084xx yy zz
m kgl mg m sI I kgm I kgm
==
=
= = =Các tham số ω được chỉnh định như sau:
1
2
3
0,1391,5u
ωωωω
====
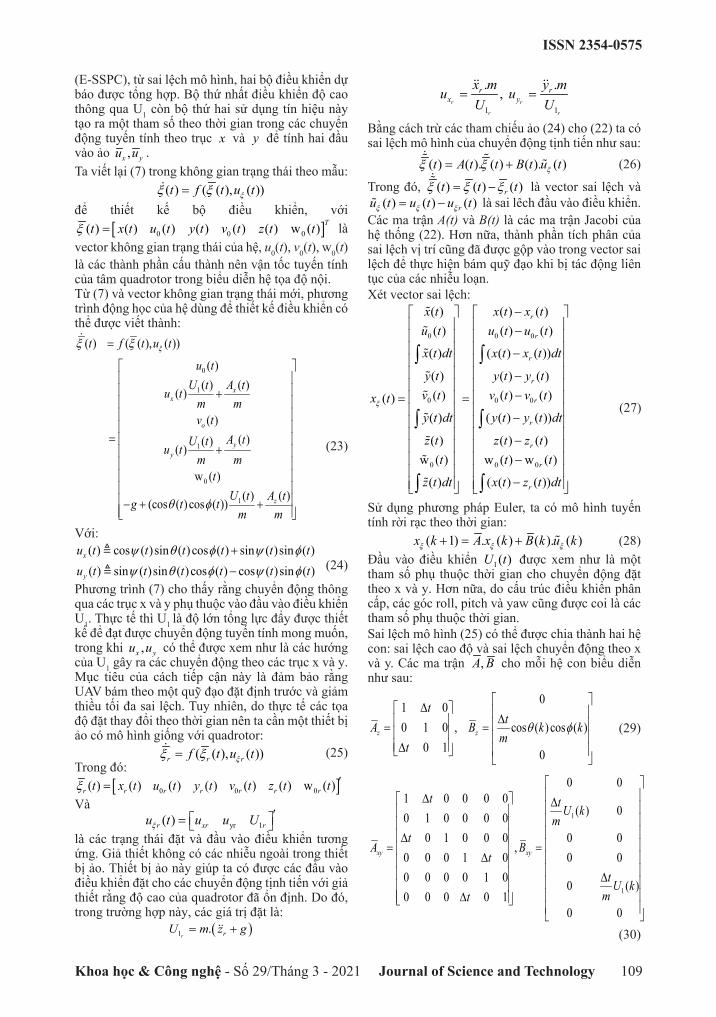
Khi quay từ vị trí ban đầu 000,5
(rad) đến 0,20,50,8
(rad): sai lệch tương đối nhỏ và thời gian ổn định nhanh
Hình 3.1. Đồ thị kết quả mô phỏng
ISSN 2354-0575
Khoa học & Công nghệ - Số 29/Tháng 3 - 2021 Journal of Science and Technology 111
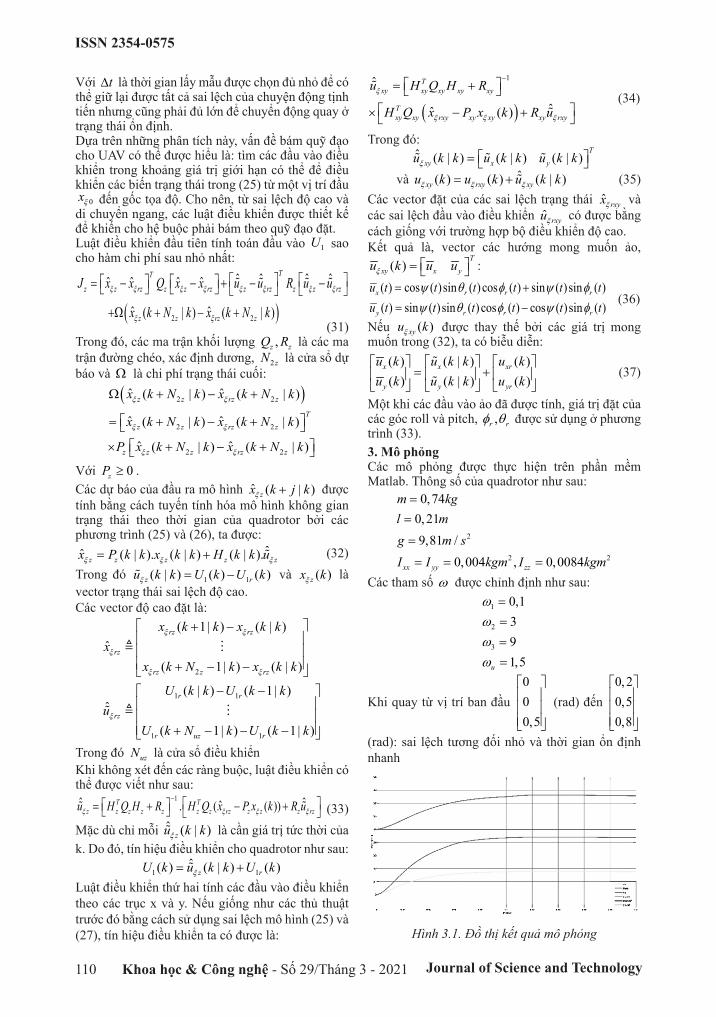
Khi quadrotor có nhiễu bất định:1
2
3
nd
nd nd
nd
ττ τ
τ
=
trong đó:
1 25ndτ = tại thời điểm t=0s2 10ndτ = tại thời điểm t=0,05s
3 15ndτ = tại thời điểm t=0.1s
Hình 3.2. Hệ có nhiễu tác độngKhi hệ có nhiễu tác động, hệ vẫn cho kết quả đáp ứng khá tốt:
Hình 3.3. Kết quả hiển thị
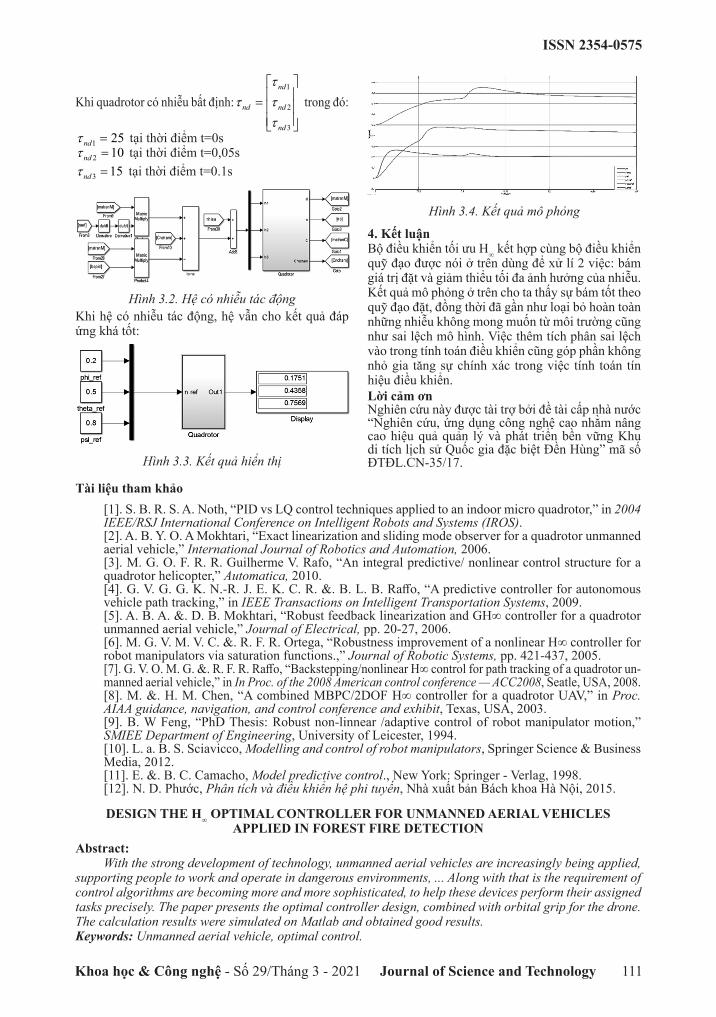
Hình 3.4. Kết quả mô phỏng
4. Kết luậnBộ điều khiển tối ưu H∞ kết hợp cùng bộ điều khiển quỹ đạo được nói ở trên dùng để xử lí 2 việc: bám giá trị đặt và giảm thiểu tối đa ảnh hưởng của nhiễu. Kết quả mô phỏng ở trên cho ta thấy sự bám tốt theo quỹ đạo đặt, đồng thời đã gần như loại bỏ hoàn toàn những nhiễu không mong muốn từ môi trường cũng như sai lệch mô hình. Việc thêm tích phân sai lệch vào trong tính toán điều khiển cũng góp phần không nhỏ gia tăng sự chính xác trong việc tính toán tín hiệu điều khiển.Lời cảm ơnNghiên cứu này được tài trợ bởi đề tài cấp nhà nước “Nghiên cứu, ứng dụng công nghệ cao nhằm nâng cao hiệu quả quản lý và phát triển bền vững Khu di tích lịch sử Quốc gia đặc biệt Đền Hùng” mã số ĐTĐL.CN-35/17.
Tài liệu tham khảo[1]. S. B. R. S. A. Noth, “PID vs LQ control techniques applied to an indoor micro quadrotor,” in 2004 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS).[2]. A. B. Y. O. A Mokhtari, “Exact linearization and sliding mode observer for a quadrotor unmanned aerial vehicle,” International Journal of Robotics and Automation, 2006.[3]. M. G. O. F. R. R. Guilherme V. Rafo, “An integral predictive/ nonlinear control structure for a quadrotor helicopter,” Automatica, 2010.[4]. G. V. G. G. K. N.-R. J. E. K. C. R. &. B. L. B. Raffo, “A predictive controller for autonomous vehicle path tracking,” in IEEE Transactions on Intelligent Transportation Systems, 2009.[5]. A. B. A. &. D. B. Mokhtari, “Robust feedback linearization and GH∞ controller for a quadrotor unmanned aerial vehicle,” Journal of Electrical, pp. 20-27, 2006.[6]. M. G. V. M. V. C. &. R. F. R. Ortega, “Robustness improvement of a nonlinear H∞ controller for robot manipulators via saturation functions.,” Journal of Robotic Systems, pp. 421-437, 2005.[7]. G. V. O. M. G. &. R. F. R. Raffo, “Backstepping/nonlinear H∞ control for path tracking of a quadrotor un-manned aerial vehicle,” in In Proc. of the 2008 American control conference — ACC2008, Seatle, USA, 2008.[8]. M. &. H. M. Chen, “A combined MBPC/2DOF H∞ controller for a quadrotor UAV,” in Proc. AIAA guidance, navigation, and control conference and exhibit, Texas, USA, 2003.[9]. B. W Feng, “PhD Thesis: Robust non-linnear /adaptive control of robot manipulator motion,” SMIEE Department of Engineering, University of Leicester, 1994.[10]. L. a. B. S. Sciavicco, Modelling and control of robot manipulators, Springer Science & Business Media, 2012.[11]. E. &. B. C. Camacho, Model predictive control., New York: Springer - Verlag, 1998.[12]. N. D. Phước, Phân tích và điều khiển hệ phi tuyến, Nhà xuất bản Bách khoa Hà Nội, 2015.
DESIGN THE H∞ OPTIMAL CONTROLLER FOR UNMANNED AERIAL VEHICLES APPLIED IN FOREST FIRE DETECTION
Abstract:With the strong development of technology, unmanned aerial vehicles are increasingly being applied,
supporting people to work and operate in dangerous environments, ... Along with that is the requirement of control algorithms are becoming more and more sophisticated, to help these devices perform their assigned tasks precisely. The paper presents the optimal controller design, combined with orbital grip for the drone. The calculation results were simulated on Matlab and obtained good results.Keywords: Unmanned aerial vehicle, optimal control.





























