Embed Size (px)
Citation preview

ESCUELA SUPERIOR POLITÉCNICA DE
CHIMBORAZO
FACULTAD DE MECÁNICA
INGENIERÍA MECÁNICA
TEMA: Solución de ecuaciones
homogéneas por el método
de GAUSS – JORDAN
ASIGNATURA: Algebra Lineal y Geometría Analítica
AUTOR: Daniel Orozco
CÓDIGO: 6999
SEMESTRE: Tercero “A”
FECHA Y LUGAR: Riobamba, 20 de junio del 2015
1
CONTENIDO
CONTENIDO .............................................................................................................. 1
ILUSTRACIONES ...................................................................................................... 2
SIMBOLOS ................................................................................................................. 3
OBJETIVOS ................................................................................................................ 4
OBJETIVO PRINCIPAL ........................................................................................ 4
OBJETIVOS ESPECÍFICOS ................................................................................ 4
INTRODUCCION ....................................................................................................... 5
MARCO TEORICO .................................................................................................... 6
SISTEMAS DE ECUACIONES LINEALES........................................................ 6
CLASIFICACION DE SISTEMAS DE ECUACIONES ..................................... 7
SOLUCIÓN DE ECUACIONES POR EL MÉTODO DE GAUSS-JORDAN . 7
SISTEMAS DE ECUACIONES LINEALES HOMOGENEAS POR EL
METODO DE GAUSS-JORDAN ......................................................................... 9
POSIBILIDADES DE SOLUCIONARLAS .................................................... 10
SOLUCION TRIVIAL ....................................................................................... 10
INFINITAS SOLUCIONES.............................................................................. 11
SOLUCION A PROBLEMAS.................................................................................. 12
EJERCICIOS POR SOLUCION TRIVIAL ........................................................ 12
EJERCICIOS DE INFINITAS SOLUCIONES .................................................. 13
CONCLUSIONES .................................................................................................... 15
BIBLIOGRAFIA......................................................................................................... 16

2
ILUSTRACIONES
Ilustración 1 ..................................................................................................................... 6
Ilustración 2 ................................................................................................................... 12
Ilustración 3 ................................................................................................................... 12
Ilustración 4 ................................................................................................................... 13
Ilustración 5 ................................................................................................................... 13
Ilustración 6 ................................................................................................................... 14
Ilustración 7 ................................................................................................................... 14

3
SIMBOLOS
𝑡: Variable cualquiera
𝑥: Variable cualquiera
𝑦: Variable cualquiera
𝑧: Variable cualquiera
ϵ: Pertenece a
𝑎: Constante cualquiera
𝑏: Constante cualquiera
𝑅𝑖: Fila numero 𝑖
𝑚: Número de Columnas
𝑛: Número de filas
𝑅: Números Reales
4
OBJETIVOS
OBJETIVO PRINCIPAL
Resolver problemas sobre sistemas de ecuaciones homogéneas por el método
de GAUSS – JORDAN mediante la interpretación, expresión y representación en
términos de matrices y determinantes utilizando definiciones propiedades y
métodos adecuados para cada tipo.
OBJETIVOS ESPECÍFICOS
Tener los conocimientos necesarios para ubicar en su contexto teórico las
ecuaciones homogéneas y su aplicación a diferentes métodos de orden
superior, estimar su grado de complejidad y dominar algunos métodos para su
tratamiento.
Investigar los casos de sistemas homogéneos.
Resolver ejemplos para cada caso.

5
INTRODUCCION
La solución de los sistemas de ecuaciones homogéneas encuentra una amplia
aplicación en la ciencia y la tecnología. En particular, se puede afirmar, que en
cualquier rama de la Ingeniería existe al menos una aplicación que requiera del
planteamiento y solución de tales sistemas. Es por eso, que dentro de los planes
de estudio de las carreras de ingeniería, se incluya el tema solución de sistemas
de ecuaciones homogéneas mediante el método de Gauss-Jordan, por las
ventajas que éste ofrece.
6
MARCO TEORICO
SISTEMAS DE ECUACIONES LINEALES
Se denomina ecuación lineal a aquella que tiene la forma de un polinomio de
primer grado, es decir, las incógnitas no están elevadas a potencias, ni
multiplicadas entre sí, ni en el denominador.
Una ecuación lineal sobre 𝑅 en 𝑛 variables es una expresión de la forma:
𝑎1𝑥1 + 𝑎2𝑥2 + . . . + 𝑎𝑚𝑥𝑛 = 𝑏
donde los 𝑎1 ,𝑏 son números conocidos y los 𝑥𝑖 son variables. Los 𝑎𝑖 se
denominan coeficientes de los 𝑥𝑖 respectivos, y 𝑏 es el término independiente de
la ecuación.
Por ejemplo, 3𝑥 + 2𝑦 + 6𝑧 = 6 es una ecuación lineal con tres incógnitas.
Como es bien sabido, las ecuaciones lineales con 2 incógnitas representan una
recta en el plano.
Si la ecuación lineal tiene 3 incógnitas, su representación gráfica es un plano en
el espacio.
Un ejemplo de ambas representaciones puede observarse en la figura:
Ilustración 1
Fuente: (1)
7
CLASIFICACION DE SISTEMAS DE ECUACIONES
Sistemas homogéneos (2 tipos de soluciones)
Sistemas no homogéneos (3 tipos de soluciones)
SOLUCIÓN DE ECUACIONES POR EL MÉTODO DE GAUSS-JORDAN
Este método, que constituye una variación del método de eliminación de Gauss,
permite resolver hasta 15 o 20 ecuaciones simultáneas, con 8 o 10 dígitos
significativos en las operaciones aritméticas de la computadora. Este
procedimiento se distingue del método Gaussiano en que cuando se elimina una
incógnita, se elimina de todas las ecuaciones restantes, es decir, las que
preceden a la ecuación pivote así como de las que la siguen.
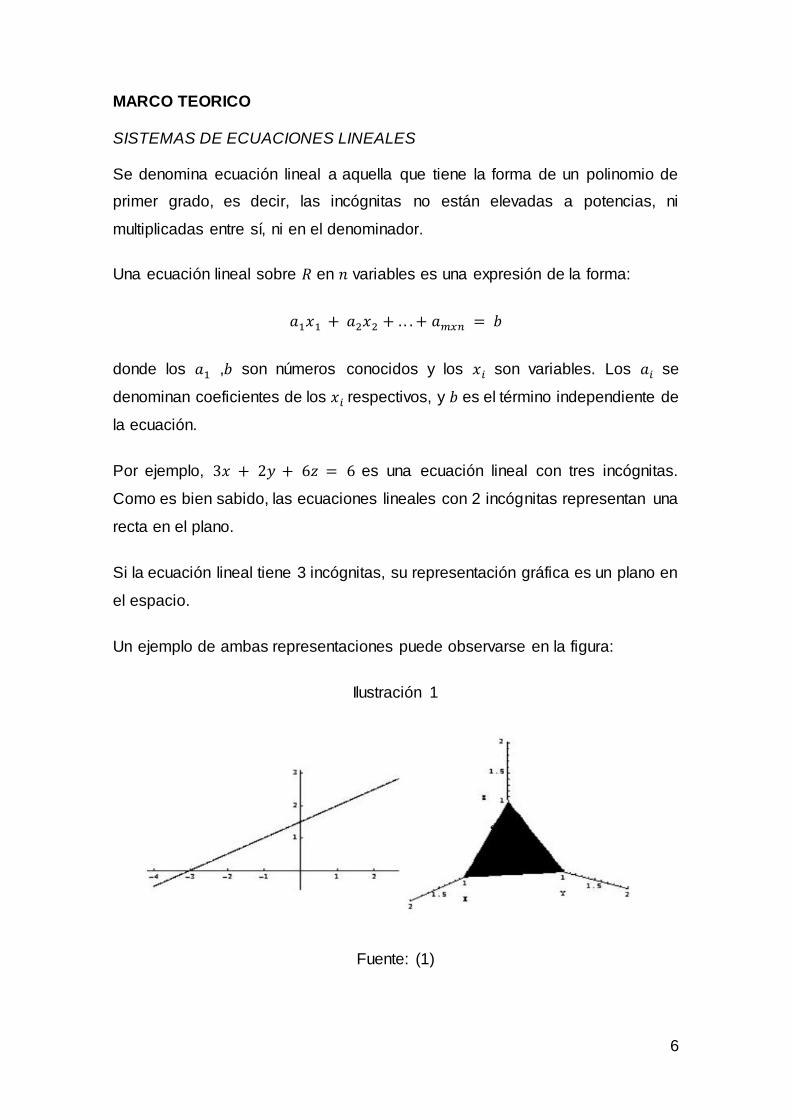
El método se ilustra mejor con un ejemplo. Resolvamos el siguiente conjunto de
ecuaciones.
3.000𝑥1 − 0.100𝑥2 − 0.200𝑥3 = 7.85000.100𝑥1+ 7.000 𝑥2− 0.300𝑥3 = − 19.300
0.300𝑥1 − 0.200𝑥2 +10.000𝑥3 = 71.400
Primero expresemos los coeficientes y el vector de términos independientes
como una matriz aumentada.
Se normaliza el primer renglón dividiendo entre 3 para obtener:

8
El término 𝑥1 se puede eliminar del segundo renglón restando 0.1 veces el
primero del segundo renglón. De una manera similar, restando 0.3 veces el
primero del tercer renglón se elimina el término con 𝑥1 del tercer renglón.
En seguida, se normaliza el segundo renglón dividiendo entre 7.00333:
Reduciendo los términos en 𝑥2 de la primera y la tercera ecuación se obtiene:
El tercer renglón se normaliza dividiéndolo entre 10.010:
Finalmente, los términos con 𝑥3 se pueden reducir de la primera y segunda
ecuación para obtener:

9
Nótese que no se necesita sustitución hacia atrás para obtener la solución.
Aunque los métodos de Gauss-Jordan y de eliminación de Gauss pueden
parecer casi idénticos, el primero requiere aproximadamente 50% menos
operaciones. Por lo tanto, la eliminación gaussiana es el método simple por
excelencia en la obtención de soluciones exactas a las ecuaciones lineales
simultáneas. Una de las principales razones para incluir el método de Gauss-
Jordan, es la de proporcionar un método directo para obtener la matriz inversa.
SISTEMAS DE ECUACIONES LINEALES HOMOGENEAS POR EL METODO
DE GAUSS-JORDAN
Se llama sistema lineal homogéneo a todo sistema lineal de ecuaciones en el
que los términos independientes o segundos miembros de cada ecuación son
cero, es decir:
𝑎11𝑥1 + 𝑎12𝑥2 +⋯+ 𝑎1𝑛𝑥𝑛 = 0𝑎21𝑥1 + 𝑎22𝑥2 +⋯+ 𝑎2𝑛𝑥𝑛 = 0……………………………………. .……………………………………. .𝑎𝑚1𝑥1+ 𝑎𝑚2𝑥2 +⋯+ 𝑎𝑚𝑛𝑥𝑛 = 0
“En los sistemas lineales homogéneos, el rango de la matriz ampliada es siempre
igual al rango de la matriz de coeficientes, puesto que estas dos matrices se
diferencian tan solo en una columna de ceros. Por lo tanto, los sistemas
homogéneos son siempre compatibles, evidentemente, siempre tienen alguna
solución, pues al menos 𝑥𝑖 = 0, 1 ≤ 𝑖 ≤ 𝑛, es una solución que se denomina
solución trivial.” (2)
Los sistemas homogéneos SIEMPRE tienen solución ya que
𝑥1 = 𝑥2 = 𝑥3 = 𝑥𝑛 = 0
es solución del sistema, ésta solución es llamada la solución trivial, así un
sistema homogéneo de ecuaciones lineales tiene solución única o tiene una
infinidad de soluciones.

10
POSIBILIDADES DE SOLUCIONARLAS
En un sistema homogéneo caben dos posibilidades:
La solución trivial
Infinitas soluciones
SOLUCION TRIVIAL
Cuando el rango de la matriz de coeficientes es igual al número de incógnitas,
entonces el sistema es compatible determinado y no tiene otra solución más que
la trivial, es decir, cuando las incógnitas valen cero cada una.
Ejemplo:
Resolver el siguiente sistema de ecuaciones
2𝑥 − 3𝑦 + 𝑧 = 0 𝑥 + 𝑦 − 𝑧 = 04𝑥 + 2𝑦 + 3𝑧 = 0
Solución
(2 −3 1 01 1 −1 04 2 3 0
) 𝑅1↔𝑅2 → (
1 1 −1 02 −3 1 04 2 3 0
)
−2𝑅1+𝑅2 −4𝑅1+𝑅3 → (
1 1 −1 00 −5 3 00 −2 7 0
)−3𝑅3+𝑅2→
(1 1 −1 00 1 −18 00 −2 7 0
)
2𝑅2+𝑅3 −𝑅2+𝑅1 → (
1 0 17 00 1 −18 00 0 −29 0
) −1
29𝑅2
→ (1 0 17 01 1 −18 00 0 1 0
)
18𝑅3+𝑅2 −17𝑅3+𝑅1 →
(1 0 0 00 1 0 00 0 1 0
)
Luego, 𝑥 = 𝑦 = 𝑧 = 0, el sistema tiene una solución trivial.

11
→ ;
INFINITAS SOLUCIONES
Cuando el rango de la matriz de coeficientes es menor que el número de
incógnitas, entonces algunas de las incógnitas quedan en función de otras y
valen cero, entonces el sistema tiene infinitas soluciones.
Ejemplos:
Resolver el siguiente sistema de ecuaciones
2𝑥 − 3𝑦 + 4𝑧 = 03𝑥 − 2𝑦 + 2𝑧 = 0 𝑥 − 4𝑦 + 6𝑧 = 0
Solución:
(2 −3 4 03 −2 2 01 −4 6 0
) 𝑅3↔𝑅1 → (
1 −4 6 03 −2 2 02 −3 4 0
)
−3𝑅1+𝑅2 −2𝑅1+𝑅3 → (
1 −4 6 00 10 −16 00 5 −8 0
)−1
2𝑅2+𝑅3
→
(1 −4 6 00 10 −16 00 0 0 0
)
1
10𝑅2
→ (1 −4 6 00 1 −8 5⁄ 00 0 0 0
) 4𝑅2+𝑅1 → (
1 0 −2 5⁄ 01 1 −8/5 00 0 0 0
)
De donde:
𝑥 −2
5𝑧 = 0
𝑦 −8
5𝑧 = 0 𝑥 −
2
5𝑧 = 0 𝑥 =
2
5𝑧
0𝑧 = 0 𝑦 −8
5𝑧 = 0 𝑦 =
8
5𝑧
Hacemos 𝑧 = 𝑡 ϵ 𝑅, y la solución se expresa como:
𝑥 =2
5𝑡
𝑦 =8
5𝑡
𝑧 = 𝑡
En este caso el sistema tiene una infinidad de soluciones.

12
SOLUCION A PROBLEMAS
EJERCICIOS POR SOLUCION TRIVIAL
Ilustración 2
Fuente: Autor
Ilustración 3
Fuente: Autor
13
Ilustración 4
Fuente: Autor
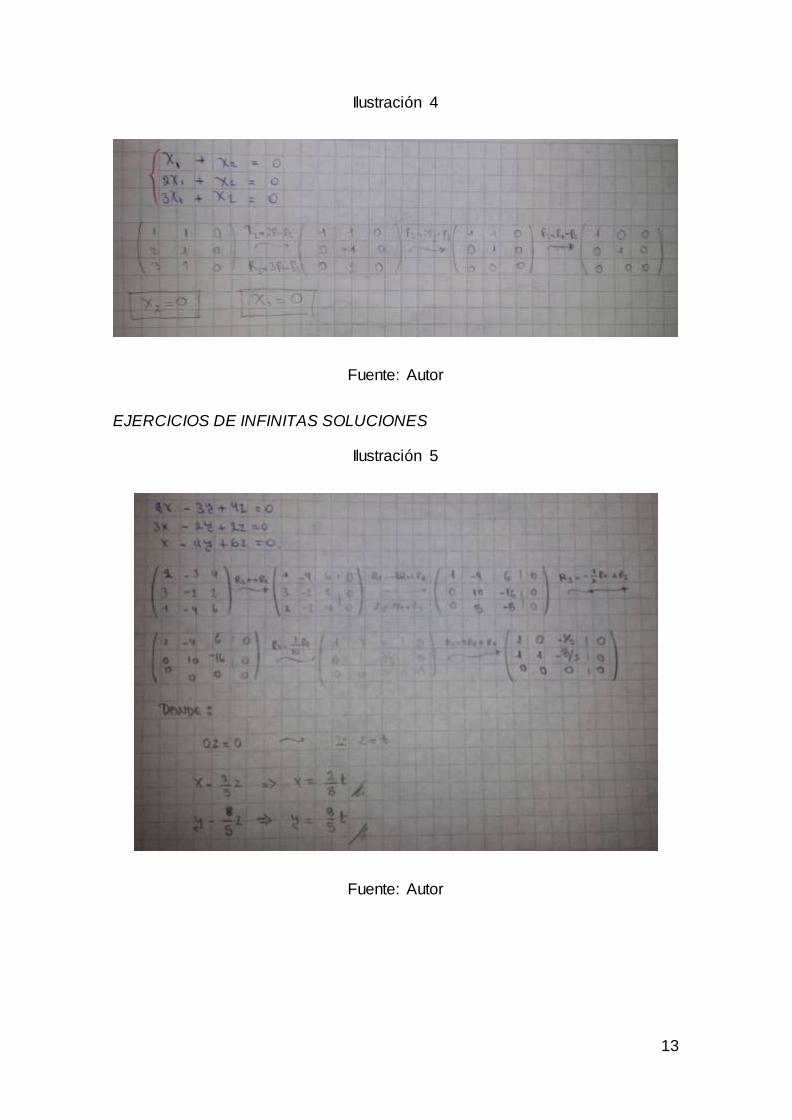
EJERCICIOS DE INFINITAS SOLUCIONES
Ilustración 5
Fuente: Autor

14
Ilustración 6
Fuente: Autor
Ilustración 7
Fuente: Autor

15
CONCLUSIONES
La solución a ecuaciones por el método de GAUSS-JORDAN nos es muy útil ya
que permite resolver un sistema de ecuaciones homogéneo de hasta 20
incógnitas, permitiéndonos reducir la matriz inicial a otra equivalente pero con
menos incógnitas.

16
BIBLIOGRAFIA
1. Howard, Anton. Introducción al Algebra Lineal. México : Limusa Wiley, 2001.
2. Sáenz, Rolando. Álgebra Lineal. Quito : Universidad Central del Ecuador,
1978.





























