Embed Size (px)
Citation preview

93
5 Sistemi linearnih jednačina
5.1 NEKE DEFINICIJE I TEOREME LINEARNE ALGEBRE
Pravougaonu matricu A, sa elementima njmia ji ,...,2,1;,...,2,1,, == ,
=
nmmm
n
n
aaa
aaa
aaa
,2,1,
,22,21,2
,11211
�
���
�
�
A
koja ima m vrsta i n kolona skraćeno ćemo obeležavati kao: A = nmjia ,, ][ (5.1)
i zvaćemo je matrica dimenzija m x n, ili matrica tipa m x n .
Kvadratna matrica
Matrica dimenzija n×n, kod koje je broj vrsta jednak broju kolona, naziva se kvadratna matrica reda n: nnjia ,, ][=A . Specijalni slučajevi kvadratne matrice su,
• nulta, ako su joj svi elementi jednaki nuli: aij = 0, i = 1,2,..,n, j = 1,2,..,n
• donja trougaona L, ako je: aij = 0, i < j,
• gornja trougaona U, ako je: aij = 0, i > j

94
=
=
nn
n
n
nnnn a
aa
aaa
aaa
aa
a
��
…
…
…
��� 0
0222
11211
21
2221
11
UL
• dijagonalna D, ako je: aij = 0, i ≠ j
• jedinična E, ako je dijagonalna i uz to: aii = 1, i = 1,2,..., n
=
=
1
1
1
0
0
0
022
11
��ED
nna
a
a
TEOREMA 1: Determinanta trougaone matrice A je jednaka:
∏=
=
n
iiia
1
detA (5.2)
Transponovanje matrice
Međusobnom zamenom vrsta i kolona matrice nmjia ,, ][=A , dimenzija m x n, dobija se
njena transponovana matrica mnjib ,, ][=B dimenzija n x m, sa elementima:
mjniab ijji ,...,2,1;,...,2,1,,, ===
i pišemo: TAB = .
Kvadratna matrica A je simetrična ako je: A = AT
Za transponovanje zbira i proizvoda (α je skalar), važi:
(A + B)T = AT + BT (5.3a)
(α A)T = α AT (5.3b)
(A B)T = BT AT (5.3c)

95
Inverzna matrica
Inverzna matrica kvadratne matrice A, ako postoji, je kvadratna matrica A-1, takva da važi:
A A-1 = A-1A = E (5.4)
Kvadratna matrica A je • nesingularna (regularna), ako ima inverznu matricu i tada je: detA ≠ 0 • singularna (neregularna), ako nema inverznu maticu i tada je: detA = 0
Ako su A i B regularne, onda važi: (A-1)-1 = A (5.5a) (A B)-1 = B-1 A-1 (5.5b)
Ortogonalna matrica
Ako je matrica A regularna i važi:
ATA = AAT = E ⇔ A-1 = AT (5.6) tj, ako je njena transponovana matrica matrica, jednaka njenoj inverznoj matrici , onda se ona naziva ortogonalna matrica. S obzirom na postupak množenja dve matrice, primetimo da ovo znači:
• da su njene vrste (kolone), posmatrane kao vektori , međusobno ortogonalne jer je skalarni proizvod dve različite vrste (kolone) jednak nuli , (vandijagonalni element proizvoda AAT)
• da su vrste (kolone) jedinični vektori , jer je skalarni proizvod neke vrste (kolone) sa samom sobom jednak jedinici (dijagonalni element proizvoda AAT).
Rang matrice
Submatrica (podmatrica) matrice nmjia ,, ][=A je kvadratna matrica reda k ≤ min{m,n},
koju čine elementi u preseku bilo kojih k redova i k kolona matrice A. Primer:
Neke submatrice 2. reda, matrice:

96
−−−
=110
121
342
A
su:
…,11
34,
21
42
−
−
−−
Za matricu nmjia ,, ][=A kažemo da ima rang r,
rang(A) = r ≤ min {m,n}, ako je bar jedna submatrica reda r nesingularna, a sve submatrice višeg reda singularne. Primer:
2
1111
7832
0321
rang =
−−
−−
jer je:
0
111
783
032
det
111
832
321
det,032
21det �=
−
−−=
−
−−≠
−
TEOREMA 2: Iz T1 sledi da je rang trougaone matrice jednak broju nenultih elemenata na glavnoj dijagonali. Primer:
050
02det,2
500
001
002
≠
=
rang
Elementarne transformacije matrice. Ekvivalentne ma trice
Sledeće transformacije izvedene na nekoj matrici, nazivaju se elementarne transformacije:
• Medusobna zamena dve vrste (kolone) matrice:

97
• Množenje neke vrste (kolone) – kao vektora skalarom α ≠ 0:
α
α
• Dodavanje neke vrste (kolone), pomnožene skalarom α , drugoj vrsti (koloni):
α
α
Elementarne matrice su matrice dobijene primenom neke od elementarnih transformacija na jediničnu matricu E . Označavamo ih kao:
,ijE ( )TijE - dobijena zamenom i- te i j- te vrste (kolone)
),(aiE ( ))(T aiE - dobijena množenjem i –te vrste (kolone) skalarom a
),(aijE ( ))(T aijE - dobijena dodavanjem j– te vrste (kolone), pomnožene sa a, i– toj vrsti (koloni)
Primeri:
T1313
001
010
100
,
100
010
001
EEE =
=
=

98
)2(
102
010
001
)2(),3(
100
030
001
)3( 133122TT EEEE =
==
=
Zapažamo da važi: )()(,)()(, TTT aaaa jiijiiijij EEEEEE ===
TEOREMA 3 : Neku elementarnu transformaciju matrice nmjia ,, ][=A možemo da
izvedemo,
• nad vrstama, množeći je s leva elementarnom matricom reda m, dobijenom istom takvom transformacijom na jediničnoj matrici,
• nad kolonama, množeći je s desna elementarnom matricom reda n, dobijenom istom takvom transformacijom na jediničnoj matrici.
Primeri:
( )
−=−==
−
− →
−
−=
−
1000
0102
0010
0001
)2(,
130
436
740
321
130
218
740
321
31)1(23 EPBA
BPA =
+⋅−−−⋅−+⋅−
−=
−
−⋅
−=130
2321)2(2812
740
321
130
218
740
321
1000
0102
0010
0001
===
−
− →
−
−=
←→
001
010
100
,
031
812
047
123
130
218
740
321
T13
)3()1(
EQBA
BAQ =
−
−=
⋅
−
−=
001
812
047
123
001
010
100
130
218
740
321
Ako je matrica B dobijena od matrice A nizom elementarnih transformacija kažemo da su to ekvivalentne matrice i pišemo:

99
A ∼ B i B ∼ A Ekvivalentne matrice imaju isti rang,
rang (A) = rang (B)
TEOREMA 4 : Svaka matrica nmjia ,, ][=A se može prevesti u ekvivalentnu “trapeznu”
matricu nmjib ,, ][=B , koja kao podmatricu reda r, formiranu od elemenata u preseku prvih r ≤
min(m,n) vrsta i kolona ima gornju nesingularnu trougaonu matricu U (svi dijagonalni elementi različiti od nule) i njribij ,...,2,1;,0 =>=
vrsta)(
vrsta
00
0
00
00
00
0
,1,
,21,2
,11,1
222
11211
rm
r
bb
bb
bb
b
bb
bbb
nrrr
nr
nr
rr
r
r
−
→
+
+
+
…
��
…
…
��
…
…
�…�
…
…
…
�…��
…
…
A (5.7)
U skladu sa T2, rang(A) = rang(B) = rang(U) = r, r ≤ min(m,n) (5.8)
5.2. GAUSOV ALGORITAM ZA ODREDJIVANJE RANGA
Gausove transformacije na matrici nmjia ,, ][=A , radi određivanja njenog ranga baziraju se
na T4 i imaju kao rezultat trapeznu matricu (5.7). One su identične elementarnim transformacijama na proširenoj matrici, u sklopu eliminacionog ili Gausovog postupka rešavanja sistema linearnih jednačina. Tako se k- ti korak Gausovog algoritma za nalaženje ranga matrice A (k < n) sastoji u dodavanju k - te vrste matrice (uz pretpostavku da je dijagonalni element u toj vrsti različit od nule), pomnožene odgovarajućim brojevima, vrstama ispod nje, redom, sa ciljem da elementi ispod dijagonalnog u k-toj koloni transformisane matrice budu jednaki nuli .
Nakon (k-1) koraka Gausovog algoritma, izgled transformisane matrice je:

100
−−−
−−−
−−−
)1()1()1(
)1()1()1(
)1()1()1(
)1(2
)1(2
)1(2
)1(22
1111211
00
00
00
0
kmn
kmj
kmk
kin
kij
kik
kkn
kkj
kkk
njk
njk
aaa
aaa
aaa
aaaa
aaaaa
………
�…�…�…��
………
�…�…�…��
………
�…�…�…��
………
………
U eksponentu nekog elementa matrice, naznačen je broj transformacija koje je taj element doživeo. Pretpostavimo da je,
0)1( ≠−kkka
što je uslov za izvođenje k-tog koraka. Ako uslov nije ispunjen, onda se zamenom k-te i neke druge vrste (kolone), postigne da on bude zadovoljen. Sledeća formula opisuje k-ti korak algoritma:
mkkinkkja
aaaa k
kk
kkj
kikk
ijk
ij ,...,2,1,,...,2,1,)1(
)1()1()1()( ++=++=−=
−
−−
− (5.9)
Gausov postupak se završava kada:
• su svi elementi u vrstama k do m jednaki nuli, ili
• k = m (nema više vrsta), ili
• k = n (nema više kolona)
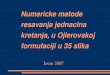
Mogući oblici rezultujuće trapezne matrice su prikazani na slikama 5.1 i 5.2:
Slika 5.1a - Rezultujuća matrica u slučaju nm≤
r = m
r < m
m ≤ n

101
r = n
r < n
n ≤ m
Slika 5.1b - Rezultujuća matrica u slučaju mn≤ Primer:
−− →
−−−
−− →
−−
−−+
+−
0000
714
03
70
21
1210
71470
0321
1111
7832
0321
7/)2()3()1()3(
)1(2)2(
r = 2
5.3. LINEARNA ZAVISNOST VRSTA (KOLONA) MATRICE
Vektori
Pod vektorom a, podrazumevamo uređenu n-torku ili niz od n realnih brojeva, koje
zovemo koordinate vektora. Vektor sa n koordinata, zvaćemo n-dimenzionalan vektor. Primeri:
dvodimenzionalan vektor a:
−=
2
1a , četvorodimenzioni vektor b:
=
5
0
0
2
b ,
vektor položaja tačke M(x,y,z) u Dekartovom koordinatnom sistemu:
=
z
y
x
M )(r

102
Linearna zavisnost vektora
Kaže se da su vektori kii ,...,2,1, =a linearno zavisni, ako postoje brojevi
kii ,...,2,1, =λ od kojih je bar jedan različit od nule, takvi da je:
0a =λ∑=
k
iii
1
(5.10)
To znači da se bar jedan od njih može predstaviti kao linearna kombinacija ostalih:
kjk
jii
iij ,...,2,1,1
=δ=∑≠=
aa (5.11)
gde su iδ skalari i zovu se koeficijenti linearne kombinacije (5.11).
Primeri: a)
12
243214321
22
100
2
1002
aa
aaaaa0aaaa
=
=++=⇒=++−
b)
214
412
4243214321
4
1
2
1
42
22
120
2
1402
aaa
aaa
aaaaaa0aaaa
+−=
+=
−=−+=⇒=++−
Trivijalan slu čaj linearne kombinacije je da je samo jedan od brojeva iλ u (5.10) različit od nule. Tada je očigledno jedini vektor koji se može izraziti kao linearna kombinacija ostalih (5.11) nula vektor, jer su svi koeficijenti iδ jednaki nuli. U daljim razmatranjima,
izuzećemo trivijalan slučaj.
Ako je jednačina (5.10) zadovoljena samo kada su svi skalari jednaki nuli kii ,...,2,1,0 ==λ , onda se kaže da su vektori kii ,...,2,1, =a linearno nezavisni. Drugim
rečima, nijedan od njih se ne može izraziti kao linearna kombinacija (5.11) ostalih. Ako je skup vektora kii ,...,2,1, =a linearno nezavisan (skup linearno nezavisnih vektora), lako je
pokazati da je i svaki njegov podskup takođe linearno nezavisan. Tako se može govoriti o maksimalnom broju linearno nezavisnih vektora u nekom skupu vektora.
Primeri: a) Skup tri vektora u ravni Oxy (n = 2),

103
−=
−=
−=+−=
1
5.2,
5.0
25.1,
1
5.25.2 321 aajia
nije linearno nezavisan. Na primer:
a1+ a3 + 0a2= 0, 0a1+ a2 – 0.5a3= 0, ...
Bilo koja dva od 3 data vektora su linearno zavisni od trećeg, tj. mogu se dobiti množenjem trećeg vektora nekim skalarom ≠ 0. Na primer,
1312 ,5.0 aaaa −=−=
Maksimalan broj linearno nezavisnih vektora je k = 1. Vektori su kolinearni - leže na jednoj pravoj u Oxy ravni, koja prolazi kroz koordinatni početak. b) Vektori u Oxy ravni,
−−=
−=
=+=
1
2,
2
2,
2
12 321 aajia
su 3 linearno zavisna vektora. Na primer:
a1+ 0.5a2+ a3 = 0 .
Vektori ne leže na jednoj pravoj i maksimalan broj linearno nezavisnih vektora je k = n = 2. Svaki par od data 3 vektora čini skup linearno nezavisnih, dakle nekolinearnih, vektora. Na primer,
0a1+ 0a2 = 0
Bilo koji od posmatranih vektora je neka linearna kombinacija ostala dva. Na primer,
)5.0( 213 aaa +−=
Vektorski prostori i potprostori
Beskonačan skup svih n - dimenzionalnih vektora (vektori sa n koordinata) zajedno sa
operacijama:
• množenja vektora skalarom • sabiranja vektora
x
y
a3
a1
a2 x
y
a3
a2
a1
a) b)
x
a3 = - a1 a2 = 0.5a3 = - 0.5a1 a3 = - (a1 +0.5a2)
k = 1 k = n= 2
j=b2
i=b1

104
• skalarnog množenja vektora
naziva se n - dimenzionalni vektorski prostor. Maksimalan broj linearno nezavisnih vektora u n-dimenzionalnom vektorskom prostoru je tačno jednak n. Bilo koji skup, koji sadrži maksimalan broj linearno nezavisnih vektora naziva se baza vektorskog prostora, a njeni elementi kii ,...,2,1, =b , bazni vektori. Iz definicije linearne zavisnosti vektora, sledi da su
svi ostali vektori neke linearne kombinacije baznih vektora. Jedna očigledna baza n - dimenzionalnog vektorskog prostora su vektori:
=
=
=
1
0
0
,,
0
1
0
,
0
0
1
21�
���
nbbb
Ta baza se naziva kanonična baza. Kanoničnu bazu u trodimenzionalnom Euklidskom prostoru čine ortovi (jedinični vektori) i, j i k, jer se svaki vektor v u tom prostoru (brzina, sila itd.) može razložiti na ta tri vektora, tj. prikazati kao linearna kombinacija:
kjiv 321 xxx ++=
čiji su koeficijenti koordinate ili komponente vektora v u koordinatnim pravcima.
U n - dimenzionalnom vektorskom prostoru, odabrani skup od k (k ≤ n) linearno nezavisnih vektora formira jednu bazu k – dimenzionog vektorskog potprostora u kome je svaki vektor jednak nekoj linearnoj kombinacija odabranih baznih vektora. Primeri:
a) U prethodnom primeru a), svi kolinearni vektori, koji leže na pravoj definisanoj bilo kojim od tri data dvodimenzionalna vektora, čine jedan 1- dimenzioni vektorski potprostor, za čiju se bazu može uzeti recimo vektor a1
b) U prethodnom primeru b), maksimalan broj linearno nezavisnih od data tri dvodimenzionalna vektora (n = 2) je: k = n = 2. Pošto nijedan par od tri data vektora ne leži na jednoj pravoj, on se može uzeti kao baza 2- dimenzionalnog vektorskog potprostora. Ako bi pak, dva od tri vektora bili kolinearni, recimo a1 i a2 oni ne bi mogli činiti bazu 2-dimenzionalnog potprostora.
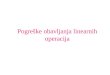
c) Tri komplanarna, nekolinearna vektora u trodimenzionalnom prostoru (slika)
y a1
x
a3
z
a2
n = 3 k = 2

105
Pošto vektori leže u jednoj ravni, linearno su zavisni i i bilo koji od njih se može raložiti po ostala dva. Maksimalan broj linearno nezavisnih vektora je 2 i bilo koja dva od tri vektora, ako nisu kolinearni, mogu da se uzmu kao baza 2-dimenzionog vektorskog potprostora, koga čine svi vektori u datoj ravni.
d) Tri nekomplanarna vektora u trodimenzionalnom prostoru (slika). Vektori ne leže u istoj ravni, pa su linearno nezavisni:
λ1a1+ λ2a2+ λ3a3 = 0, za λ1= λ2= λ3= 0
i formiraju jednu bazu 3- dimenzionog vektorskog (pot)prostora.
y a1
x
a3
z
a2
k = n = 3
Broj nezavisnih vrsta (kolona) matrice
Vrste i kolone neke matrice nmija ,][=A su vektori. Pri tom razlikujemo:
• horizontalne vektore ili vektor- vrste, sa po n koordinata (elemenata) • vertikalne vektore ili vektor- kolone, sa po m koordinata (elemenata)
Dogovorićemo se da se pod nekim vektorom a, b, c, itd. podrazumeva vertikalni vektor. Horizontalan vektor ćemo onda označavati kao transponovani vertikalan vektor.
Primeri:
]3,5.0,5.2,1[,
3
2
0
−−=
−= Tba
Ako dozvolimo da elementi matrica i vektora mogu da budu vektori i matrice, onda je
očigledno da neku matricu nmija ,][=A , možemo da prikažemo alternativno kao:

106
• (1 x n) matricu, tj. vektor- vrstu , čiji su elementi, m- dimenzionalni vektori- kolone • (m x 1) matricu, tj. vektor- kolonu čiji su elementi , n- dimenzionalni vektori- vrste
[ ] [ ]iniiTi
mj
j
j
j
Tm
T
T
n bbb
a
a
a
…��
… 212
1
2
1
21 ,, =
=
== ba
b
b
b
aaaA (5.12)
TEOREMA 5 : Maksimalan broj linearno nezavisnih vektora - vrsta matrice nmija ,][=A ,
jednak je maksimalnom broju linearno nezavisnih vektora- kolona i jednak je rangu matrice.
Iz teoreme neposredno sledi: )(rang)(rang TAA = (5.13)
Neka je rang matrice nmija ,][=A jednak r i neka je submatrica reda r u gornjem levom uglu
matrice A, nesingularna. Znači da su prvih r kolona, rjj ,...,2,1, =a matrice linearno
nezavisne, kao i prvih r vrsta, riTi ,...,2,1, =b . Ostale kolone (vrste) su onda neke linearne
kombinacije tih r kolona (vrsta):
nrrjrrjjjj ,...,2,1,2211 ++=λ++λ+λ= aaaa � (5.14a)
mrriT
rriT
iT
iTi ,,2,1,2211 �… ++=λ′++λ′+λ′= bbbb (5.14b)
5.4 ODREDIVANJE BROJA NEZAVISNIH HEMIJSKIH REAKCIJA
Da bi mogli da iskoristimo metode linearne algebre u stehiometriji, koristićemo sledeći
uopšteni prikaz hemijske reakcije, tj. stehiometrijske jednačine:
r
r

107
01
=∑=
cN
iii Aν (5.15)
Nc je broj supstanci koje učestvuju u reakciji. Ai označava susptancu, koja učestvuje u reakciji, tj. njen molekul, a νi njen stehiometrijski koeficijent, pri čemu važi dogovor:
reakcijiu reaktant za
reakcije produkt za
0
0
<>
iν
Primer:
Stehiometrijsku jednačinu:
224 3HCOOHCH +=+
prevodimo, prebacujući molekule reaktanata na desnu stranu znaka jednakosti, u ekvivalentnu, koja ima oblik (5.15):
03 242 =−−+ OHCHHCO
Ako supstance označimo kao:
2432241 ,,, HACOAOHACHA ====
imamo:
3,1,1 4321 =ν=ν−=ν=ν
i posmatranoj reakciji dodeljujemo horizontalan vektor:
]3,1,1,1[ −−=Tr
Ako se u sistemu odigrava više reakcija, njihove stehiometrijske jednačine se prikazuju na
sledeći način:
r1
,...,2,1,0 NjACN
iiij ==ν∑
=
(5.16)
gde su: Ai - komponenta i u reakcionoj smeši νij - stehiometrijski koeficijent i-te komponente u j-toj reakciji Nc - broj komponenata u sistemu Nr - broj reakcija u sistemu Primer: Reakcije između komponenata C, O2, CO i CO2
C + 1/2 O2 = CO (R1) CO + 1/2O2 = CO2 (R2)

108
CO2 + C = 2CO (R3)
U formi (5.16) one izgledaju:
- C - 1/2 O2 + CO = 0 (R1) - 1/2O2 - CO + CO2 = 0 (R2)
- C + 2CO - CO2 = 0 (R3)
pri čemu smo komponente numerisali kao: C(1), O2(2), CO (3) i CO2(4).
Jasno je da je sistem reakcija (5.16) definisan matricom stehiometrijskih koeficijenata dimenzija (Nc x NR) koju zovemo stehiometrijska matrica S:
rc NNijS ,][ν= (5.17)
Primer: Stehiometrijska matrica za sistem reakcija u prethodnom primeru je:
S=− −
− −−
−
1 0 1
1 2 1 2 0
1 1 2
0 1 1
/ /
Praktičan problem u stehiometriji je određivanje broja nezavisnih reakcija, tj. stehiometrijskih jednačina u nekom reakcionom sistemu. Nezavisna hemijska reakcija u skupu Nr reakcija je ona, čija se stehiometrijska jednačina ne može dobiti kao linearna kombinacija ostalih. U transponovanoj stehiometrijskoj matrici, vrste jednoznačno odgovaraju reakcijama, tj. stehiometrijskim jednačinama, a kolone komponentama.
=
νννν
νννν
νννν
=
T
T
T1
,,,2,1
,21
1,12111
rrCrr
C
C
N
j
NNNiNN
jNijjj
Ni
T
rr
r
r
S
�
�
……
�…�…��
……
�…�…��
……
j - ta reakcija
i - ta komponenta
Sledi da je broj nezavisnih hemijskih reakcija NR u sistemu od Nr reakcija:
NR = rang (S) = rang (ST) (5.18)

109
Zadatak 5.1 Odrediti broj i odabrati jedan skup nezavisnih reakcija u reakcionom sistemu:
2NO + O2 = 2NO2 (1) 2NO = N2 + O2 (2) N2 + 2O2 = 2NO2 (3) 4NH3 + 3O2 = 2N2 + 6H2O (4) 4NH3 + 6NO = 5N2 + 6H2O (5) Rešenje:
U sistemu imamo Nr = 5 reakcija i Nc = 6 komponenata. Ako komponente označimo kao:
NO2 = A1, N2 = A2, O2 = A3, NO = A4, H2O = A5, NH3 = A6
transponovana stehiometrijska matrica sistema će biti:
654321
5
4
3
2
1
466050
460320
000212
002110
002102AAAAAA
T
T
T
T
T
T
−−−−
−−−−−
=
=
r
r
r
r
r
S
Sprovodimo Gausov postupak za nalaženje ranga matrice ST:
−−−
−
−
→
−−−−
−−−
→
−−−−
−−−
→
−−−−
−−−−−
→
−−−−
−−−−−
−
−−+
−
→←
000
000
000
000
464
002
002
500
110
102
000000
464500
464500
002110
002102
464500
464500
000000
002110
002102
466050
460320
002110
002110
002102
466050
460320
000212
002110
002102
)3()4(
)5()3(
)2(5)5()2(2)4(
)2()3(
)1()3(
654321 AAAAAA

110
Dobili smo:
rang(ST) = 3
Kao nezavisne (bazne) reakcije možemo da odaberemo one, koje odgovaraju prvim trima vrstama u rezultujućoj matrici (pošto su one sigurno linearno nezavisne), a pošto je u Gausovom postupku bilo premeštanja vrsta (zamena 3. i 5. vrste u 3. koraku), to su 1, 2. i 5. vrsta u polaznoj matrici. Jedan skup nezavisnih ili baznih reakcija je:
(1) 2A1 - A3 - 2A4 = 0 2NO + O2 = 2NO2
(2) A2 + A3 - 2A4 = 0 2NO = N2 + O2
(5) 5A2 - 6A4 + 4A5 - 4A6 = 0 4NH3 + 6NO = 5N2 + 6H2O
Ostale reakcije:
(3) 2A1 - A2 - 2A3 = 0 N2 + 2O2 = 2NO2
(4) 2A2 - 3A3 + 6A5 - 4A6 = 0 4NH3 + 3O2 = 2N2 + 6H2O
su zavisne i neke su linearne kombinacije nezavisnih (vidi jednačine 5.14a,b). Te kombinacije su:
(3) = (1) - (2), (4) = (5) – 3(2)
Koeficijenti u tim kombinacijama se dobijaju rešavanjem odgovarajucih sistema linearnih jednačina. Na primer za 3. reakciju, treba odrediti koeficijente iλ u linearnoj
kombinaciji:
5322113 rrrr λ+λ+λ=
odnosno,
−
−λ+
−λ+
−−λ=
−−
4
6
6
0
5
0
0
0
2
1
1
0
0
0
2
1
0
2
0
0
0
2
1
2
321
Iz te vektorske jednačine sledi sistem od 6 linearnih jednačina sa nepoznatima
321 ,, λλλ :

111
0400
0600
0622
20
150
2002
321
321
321
321
321
321
=λ−λ+λ=λ+λ+λ=λ−λ−λ−−=λ+λ+λ−−=λ+λ+λ=λ+λ+λ
To je saglasan sistem, pa se rešava sistem od tri odabrane nezavisne jednačine. Recimo, ako odaberemo prvu, drugu i poslednju, onda iz poslednje dobijamo:
03 =λ
Smenom u 1. jednačinu i rešavanjem po 1λ dobijamo:
11 =λ
i konačno, sa tim vrednostima, iz 2. jednačine dobijamo: 12 −=λ 5.5 EGZISTENCIJA REŠENJA SISTEMA LINEARNIH JEDNAČINA
Posmatrajmo sistem od m linearnih jednačina sa n nepoznatih:
mnmnmm
nn
nn
bxaxaxa
bxaxaxa
bxaxaxa
=+++
=+++
=+++
�
�
�
�
2211
22222121
11212111
(5.19)
ili u vektorskom obliku:
bAx = (5.20) gde su:
=
==
mn
nm
b
b
b
x
x
x
a��
2
1
2
1
,ij ,,][ bxA

112
Trebaće nam proširena matrica sistema, koju ćemo označiti sa ][ bA i koju dobijamo kada
matrici sistema A dodamo, kao kolonu, vektor slobodnih koeficijenata b:
[ ]
==
mmn2mm1
2n22221
1n11211
][
baaa
baaa
baaa
…
�����
…
…
bA,bA
Kroneker-Kapelijeva teorema TEOREMA 6 (Kronecker- Capelli): Sistem linearnih jednačina ili kraće SLJ (5.19) je saglasan (ima rešenje) ako i samo ako je: ][rang)(rang bAA ==r
ili, ako rang ove matrice sistema i proširene matrice označimo sa AbA rr , ,
r = rA = rAb ≤ min (m,n) (5.21)
Pri tom, SLJ ima:
• ako je r = n, jedinstveno rešenje - korektan i određen problem
• ako je r < n, beskonačno mnogo rešenja – korektan i neodređen problem.
U protivnom, ako je rA < rAb, kaže se da je sistem protivure čan ili nesaglasan, ili da je problem nekorektan.
Slučajevi korektnog određenog problema su:
• Kvadratni SLJ, tj. r = m = n. Matrica sistema je nesingularna )0(det ≠A i rešenje se dobija množenjem s leva obe strane jednačine (5.20), inverznom matricom:
bAx 1−
= (5.22)
• Pravougaoni SLJ, tj r = n < m. Od ukupno m jednačina, nezavisno je n, a "višak" od (m - n) jednačina su neke linearne kombinacije tih n jednačina. Tako, rešenje dobijeno rešavanjem kvadratnog sistema sa n nezavisnih jednačina, zadovoljava i ostale jednačine (vidi rešenje Zadatka 5.1)
Slučajevi korektnog neodređenog problema su:
• r = m < n , što znači su u sistemu sve jednačine nezavisne (r = m ), ali one sadrže više nepoznatih od broja jednačina, pa je problem neodređen, tj. ima beskonačno mnogo rešenja.

113
• r < m < n ili r < n ≤ m , što znači da je od ukupno m , nezavisno r jednačina, koje sadrže više od r nepoznatih.
Njegovo rešavanje će biti objašnjeno kasnije.
Primer 1: 2x + y = 4 (1) x - y = -1 (2) (n = m = 2)
Gausove transformacije proširene matrice:
−− →
−− − 35.10
412
111
4122/)1()2(
rA = rAb = n = 2
Sistem ima jedinstveno rešenje: x = 1, y = 2
Geometrijska interpretacija: Prave 2x + y = 4 i x - y = -1 se seku u tački (1,2)
Primer 2:
2x + 3y = 6 (1) 4x + 6y = 12 (2) (n = m = 2)
→
− 000
632
1264
632)1(2)2(
⇒ r = rA = rAb = 1
Jednačine nisu nezavisne (r < m): druga se može dobiti množenjem prve sa 2. Sistem je saglasan i ima beskonačno mnogo rešenja. Geometrijska interpretacija: prave (1) i (2) se poklapaju.
Primer 3:
2x + 3y = 6 (1) 4x + 6y = 24 (2) (n = m = 2)
→
→
− 0120
362
1200
632
2464
632)1(2)2(
⇒ rA = 1, rAb = 2
Sistem je nesaglasan – nekorektan problem. Geometrijski: paralelne prave.
x
(1) (2)
1
1
y

114
Primer 4: 2x + y + z = 4 (1)
x - y + 2z = -1 (2) (n = 3, m = 2 < n )
−− →
−− − 35.15.10
4112
1211
41122/)1()2(
, r = rA = rAb = m = 2
Sistem je saglasan i ima beskonačno mnogo rešenja (r < n) – korektan neodređen problem. Geometrijska interpretacija: presek 2 ravni.
Primer 5:
2x + y + z = 4 (1) 6x + 3y + 3z = 12 (2) (n = 3, m = 2 < n)
→
− 0000
4112
12336
4112)1(3)2(
r = rA = rAb = 1< m,
Druga jednačina se dobija iz prve, množenjem sa 3. Problem je neodređen i korektan. Geometrijska interpretacija: 2 ravni koje se poklapaju.
rešenje - ravan
z
y
x
x
y
z

115
Primer 6: 2x + 3y - z = 6 (1) 4x + 6y - 2z = 10 (2) (n = 3, m = 2 < n)
−
−→
−
− →
−−
⋅− 0020
3162
2000
6132
10264
6132)1(2)2(
rA = 1, rAb = 2
Sistem je nesaglasan, tj. problem je nekorektan. Geometrijska interpretacija: dve paralelne ravni
Primer 7:
2x + y = 4 (1) x - y = -1 (2) x + 2y = 5 (3) (n = 2, m= 3 > n)
r = r A = rAb = 2
Treća jednačina se dobija oduzimanjem druge od prve. Korektan određen problem, koji ima jedinstveno rešenje: x = 1, y = 2. Geometrijska interpretacija: tri prave, koje se seku u jednoj tački.
y
(1)
x
(2)
(3)
Primer 8: 2x + 3y = 6 (1)
4x + 6y = 12 (2) 6x + 9y = 18 (3) (n = 2, m= 3 > n)
rA = rAb = 1
Samo jedna jednačina je nezavisna. Jednačine (2) i (3) se dobijaju množenjem (1) sa 2, odnosno 3. Problem je korektan neodređen. Geometrijska interpretacija: tri prave, koje se poklapaju.
Primer 9: 2x + y = 4 (1)

116
x - y = -1 (2) x + y = 5 (3) (n = 2, m= 3 > n)
rA= 2, rAb= 3
Sistem je nesaglasan. Geometrijska interpretacija: tri prave, koje se ne seku u jednoj tački.
Broj stepeni slobode i rešavanje saglasnog neodre đenog SLJ
Pod brojem stepeni slobode d saglasnog SLJ, podrazumeva se razlika broja nepoznatih i zajedničkog ranga matrice sistema i proširene matrice sistema:
>=−=
problem neodredjen0
problemodredjen 0rnd (5.23)
i predstavlja broj nepoznatih, kojima se moraju zadati neke vrednosti (tzv. slobodne promenljive) da bi se mogle odrediti vrednosti preostalih r nepoznatih. Na primer, u primerima 2, 4 i 8 broj stepeni slobode je 1: jednoj od nepoznatih (slobodna promenljiva) se zadaju neke vrednosti. U primeru 5 imamo dva stepena slobode – dve od tri nepoznate su slobodne promenljive (npr. za odabrani par vrednosti x i y, z se dobija kao treća koordinata tačke u ravni, definisanoj jednačinama sistema) .
Neka je submatrica koju čine elementi u preseku prvih r vrsta i r kolona proširene matrice ][ bA nesingularna. To se uvek može postići elementarnim transformacijama – međusobna
zamena mesta vrsta (kolona), što znači prenumeraciju jednačina (nepoznatih). Tako je prvih r jednačina međusobno nezavisno, a svaka od preostalih m - r je neka njihova linearna kombinacija, pa će je zadovoljiti rešenje tih r jednačina. Postupak se sastoji u tome da:
1. Uzmemo samo prvih r jednačina (u specijalnom slučaju r = m < n, to su sve jednačine)
y
(1)
x
(2)
(3)

117
2. U tom sistemu, nepoznate xr+1, ..., xn prebacimo na desne strane jednačina
3. Uzimajući proizvoljne vrednosti za te nepoznate, rešavamo rezultujući sistem od r jednačina sa r nepoznatih
Primer:
x1- 2x2+3x3= 1 (1) 3x1+ 2x2- 4x3= 2 (2) 5x1- 2x2+2x3= 4 (3)
( ) ( )( ) ( )
−−
− →
−−
−×−×−
0000
11380
1321
4225
2423
1321
153132
⇒ rA= rAb= 2
Prve dve jednačine su nezavisne, a treća je njihova linearna kombinacija:
(3) = 2×(1) + (2)
Uzimamo prve dve jednačine i nepoznatu x3 (slobodna promen.) prebacujemo na desnu stranu :
x1- 2x2= 1- 3x3
3x1+ 2x2= 2 + 4x3
Eliminišemo iz druge jednačine nepoznatu x1 tako što od druge oduzmemo prvu jednačinu, pomnoženu sa 3. Rezultat je ekvivalentan sistem:
x1- 2x2= 1- 3x3
8x2= -1 + 13x3
Iz druge dobijamo x2 u funkciji slobodne promenljive:
32 8
13
8
1xx +−=
i smenom tog izraza u prvu i rešavanjem po x1:
31 4
1
4
3xx +=
Za svaku odabranu vrednost za slobodnu promenljivu x3 dobijamo jedan par vrednosti x1 i x2 , tj. jedno od beskonačno mnogo rešenja datog SLJ. Homogen SLJ
U slučaju da je vektor slobodnih koeficijenata jednak nuli imamo homogen SLJ: Ax = 0 (5.23)
U skladu sa T6, homogen SLJ (5.23) je uvek saglasan jer iz b = 0 sledi:

118
rA= rAb = r
i ima očigledno rešenje x = 0, koje se naziva trivijalno. Da bi homogen SLJ imao i netrivijalna rešenja (beskonačno mnogo), potrebno je i dovoljno da bude:
r < n
tj. da bude neodređen. U slučaju kvadratnog sistema (m = n), to znači da je matrica A singularna (det A = 0). Netrivijalna rešenja se dobijaju opisanim postupkom za rešavanje saglasnih neodređenih SLJ.
5.6 GAUSOV ELIMINACIONI METOD REŠAVANJA SLJ
U daljem izlaganju ćemo se ograničiti na kvadratne saglasne SLJ: r = n = m. Postoji dva tipa postupaka za njhovo rešavanje:
• direktni ili eliminacioni • iterativni
Najpoznatiji eliminacioni postupak je Gausov. Elementarne transformacije identične
onima za određivanje ranga matrice, sprovode se na proširenoj matrici ][ bA i imaju za
rezultat ekvivalentan (ima isto rešenje kao polazni sistem) trougaoni sistem jednačina (matrica sistema je gornja trougaona), sa proširenom matricom:
→−
nn,n
n,nn-,n-n-
,n
,n
βαβαα
βααβααα
000
00
0
[
1111
2222
111211
…
…
��
……
……
b]A (5.24)
pri čemu su dijagonalni elementi αi,i ≠ 0, jer je u skladu sa pretpostavkom, rA = n (det(A) ≠ 0). U k – tom koraku postupka, uz uslov ak, k≠ 0, vrši se ustvari eliminacija nepoznate xk iz jednačina: k + 1, k + 2,..., n. Međusobnoj zameni vrsta (kolona), da bi se, ako je neophodno, na poziciju (k,k) u matrici doveo nenulti element, odgovara prenumeracija jednačina (promenljivih). Rezultujući trougaoni sistem (5.24) se zatim rešava “unazad”, povratnim zamenama, tako da se iz poslednje jednačine izračuna xn, onda iz pretposlednje xn-1 itd:
1,...,2,1,1
1
−−=
α−βα=
αβ=
∑+=
nnixx
x
n
ijji,ji
i,ii
n,n
nn
(5.25)

119
Originalan Gausov metod doživeo je različite modifikacije, sa ciljem smanjivanja akumulacije grešaka zaokruživanja u toku računskog procesa, tj. gubitka sigurnih cifara . Naime, svaki od koraka Gausovog algoritma uključuje operaciju oduzimanja, koja može da prouzrokuje gubitak značajnih cifara (ako su bliski operandi), što naročito u u slučaju rešavanja velikih sistema jednačina (veliki broj operacija) može da obezvredi krajnje rezultate. Radi se dakle o potencijalno nestabilnom ili loše uslovljenom računskom postupku tj. sistem koji se rešava može da bude loše uslovljen (osetljiv na promene koeficijenata u jednačinama). Jedan od kriterijuma loše uslovljenosti kvadratnog saglasnog SLJ je mala vrednost determinante sistema, kada se on približava neodređenom saglasnom sistemu. Pomenute modifikacije neće biti obrađene u ovom materijalu.
5.7 GAUS - ŽORDANOV ELIMINACIONI METOD
Kod Gaus-Žordanov postupka (Gauss-Jordan), u k-tom koraku se nepoznata xk eliminiše ne samo iz jednačina k + 1, k + 2, ... , n, već i iz prethodnih jednačina: 1,2,. .., k – 1. Tako je krajnji rezultat dijagonalan SLJ, sa proširenom matricom:
βα
βαβα
→nn,n…
……………
…
…
00
00
00
[ 222
111
b]A (5.26)
čija se rešenja dobijaju direktno:
xi= βi/αi,i, i = 1,2,...,n
Ako se još prva jednačina sistema sa proširenom matricom (5.26) podeli sa α11, druga sa α22, ... , poslednja sa αn,n rezultat će biti SLJ sa jediničnom matricom sistema, tj. proširenom matricom:
′
′′
nβ
ββ
100
010
001
2
1
…
……………
…
…
čija se rešenja dobijaju direktno:
′β= iix , i = 1,2,...,n
Ukupan broj osnovnih računskih operacija, a time i računsko vreme, za Gaus - Žordanov postupak je veći nego za Gausov, što ga čini i osetljivijim na greške zaokruživanja u slučaju loše uslovljeninih SLJ.
Izračunavanje inverzne matrice

120
Uprkos navedenom nedostatku, Gaus - Žordanov postupak ipak ima primenu i to za izračunavanje inverzne matrice, neke nesingularne matrice A, paralelnom primenom opisanih transformacija na jediničnu matricu E. Naime, u skladu sa T3 (poglavlje 5.1), primena prve transformacije na matrici A, reda n, odgovara njenom množenju s leva matricom T1= T1E, koja se dobija primenom iste transformacije na matrici E, reda n . Na taj način, primena prve i druge transformacije odgovara množenju matrice A sleva matricom T2T1E. Tako, primena niza svih n Gaus – Žordanovih transformacija, kojima se matrica transformiše u jediničnu, opisana je jednačinom:
( ) EAETTT =⋅⋅⋅ 11-nn
iz koje sledi,
111-
−
=⋅⋅⋅ AETTT nn
Tako se inverzna matrica neke nesingularne matrice A može dobiti primenom Gaus- Žordanovih transformacija na proširenu matricu ][ EA , sa ciljem da se A prevede u jediničnu
matricu. Kao što smo se uverili, matrica E će pri tom da se transformiše u matricu A-1:
][
100
010
001
100
010
001
][ 1
21
2221
11211
21
22221
11211
−=
→
= AEEA
nnnn
n
n
nnnn
n
n
bbb
bbb
bbb
aaa
aaa
aaa
……
�…���…��
……
……
……
�…���…��
……
……
5.8 REŠAVANJE TRODIJAGONALNOG SLJ
U hemijsko inženjerskim proračunima se sreću SLJ specijalnog tipa: tro- ili tridijagonalni linearni sistemi, kod kojih prva i poslednja jednačina sadrže samo po dve nepoznate, a ostale jednačine po tri nepoznate i to tako da matrica sistema ima trodijagonalnu formu (svi elementi van tri dijagonale su jednaki nuli):
==
−−−
−−−
nn
nnn
nnn
ac
bac
bac
bac
bac
ba
0000
000
000
000
000
0000
,
111
222
333
222
11
…
…
�
��
…
…
…
BdBx (5.27)

121
Sa ciljem značajne uštede memorijskog prostora i računskog vremena pri rešavanju većih tridijagonalnih sistema, Tomas (Thomas) je predložio eliminacioni postupak, koji se bazira na tzv. LU faktorizaciji , tj teoremi:
TEOREMA 7 : Svaka regularna matrica A se može na jedinstven način prikazati kao proizvod jedne donje i jedne gornje trougaone matrice ( LU faktorizacija):
A = LU
U skladu sa teoremom, trodijagonalnu matricu B je moguće faktorizovati kao: B = WQ (5.28) pri čemu su donja trougaona matrica W i gornja trougaona matrica Q samo bidijagonalne:
=
=−−−
1000
100
0100
0010
0001
,
00
000
00
00
000
1
3
2
1
11
33
22
1
……
……
��
…
…
…
……
…
��
……
……
……
n
nn
nn q
q
q
q
wc
wc
wc
wc
w
QW (5.29)
Njihove elemente dobijamo iz (5.28). Tako, na primer, izjednačujući odgovarajuće elemente u prvoj vrsti matrice B i proizvoda WQ dobijamo:
w1 = a1 w1q1 = b1 ⇒ q1 = b1/w1 a u drugoj vrsti: c2 = c2
c2q1 + w2 = a2 ⇒ w2 = a2 - c2q1
w2q2 = b2 ⇒ q2 = b2/w2
Tako izvodimo algoritam:
n,...,i,qcaw,w
bqaw iiii
i
ii ,32; 1
1
1111 =−===
−
−
−
− (5.30)
Ako još definišemo vektor g na sledeći način:
d = Wg (5.31) onda polazni sistem jednačina postaje: WgWQx = i ako ga sleva pomnožimo sa matricom W-1:
Qx = g (5.32)

122
Sistem (5.32) se lako rešava, budući da je, prethodno izračunata matrica Q bidijagonalna. Vektor g računamo iz (5.31):
=
+
++
=
⋅
=
− nnnnnnnn d
d
d
d
gwgc
gwgc
gwgc
gw
g
g
g
g
wc
wc
wc
w
���
…
��
…
…
…
3
2
1
1
3323
2212
11
3
2
1
33
22
1
00
00
00
000
Wg
,...,n,i,w
gcdg
w
dg
i
iiii 32; 1
1
11 =
−== − (5.33)
Preostalo je da se reši sistem (5.32), povratnim zamenama:
=
+
++
=
⋅
=−−−−−
n
n
n
nnn
n
nn
g
g
g
g
x
xqx
xqx
xqx
x
x
x
x
q
q
q
1
2
1
11
322
211
1
2
1
1
2
1
1000
1
00
010
001
���
…
�
�
…
…
Qx
121; 1 ,...,,nni,xqgxgx iiiinn −−=−== + (5.34)
Možemo da rezimiramo Tomasov postupak:
1. Odrediti vektore w i q pomoću jednačine (5.30)
2. Izračunati vektor g, pomoću jednačine (5.33)
3. Dobiti rešenja sistema iz jednačine(5.34)
Zadatak 5.2 Rešiti sledeći SLJ:
335
422
25.023
12
43
432
321
21
=−
=++−
=++
=+
xx
xxx
xxx
xx
Rešenje (Mathcad):
ORIGIN 1:=
n 4:=

123
Matrica sistema je trodijagonalna: Vektor slobodnih koeficijenata:
A
1
3
0
0
2
2
1−
0
0
0.5
2
5
0
0
2
3−
:= d
1
2
4
3
:=
Vektori a,b i c (dijagonale): a
1
2
2
3−
:= b
2
0.5
2
0
:= c
0
3
1−
5
:=
A x⋅ d−
0
0
0
0
=Provera:
x
0.2
0.4
1.2
1
=Resenje: x
ig
iq
ixi 1+
⋅−:=i n 1− n 2−, 1..:=
xn
gn
:=
Povratna zamena:
g
1
0.25
2.267
1
=
gi
di
cig
i 1−⋅−
wi
:=i 4:=gi
di
cig
i 1−⋅−
wi
:=i 3:=gi
di
cig
i 1−⋅−
wi
:=i 2:=
g1
d1
w1
:=Racunanje vektora g:
w
1
4−
1.875
8.333−
=q
2
0.125−
1.067
=w
iai
ciq
i 1−⋅−:=q
i 1−
bi 1−
wi 1−
:=i 4:=
wi
ai
ciq
i 1−⋅−:=q
i 1−
bi 1−
wi 1−
:=i 3:=
wi
ai
ciq
i 1−⋅−:=q
i 1−
bi 1−
wi 1−
:=i 2:=
w1
a1
:=Racunanje vektora w i q:

124
5.9 LINEARNA ALGEBRA U MATHCAD-U Mathcad ima određen broj operatora i funkcija za manipulaciju vektorima i matricama. Pri
tom: • Pod vektorom se u Mathcad-u podrazumeva vektor-kolona (vertikalni vektor) • Operator množenja predstavlja matrično množenje ako su argumenti matrice • Ako su argumenti vektori, operator množenja daje skalarni proizvod
Neki matrično-vektorske operatori se mogu realizovati pomoću Matrix alata od kojih su najvažniji alati za,
• formiranje matrice-vektora, • izbor pojedinačnog elementa matrice ili vektora • izbor kolone matrice, • nalaženje inverzne matrice date kvadratne matrice, • nalaženje transponovane matrice, • nalaženje determinante matrice (primenjen na matricu daje determinantu a
primenjen na vektor daje intenzitet vektora), • vektorizaciju, tj. primenu operatora i funkcija, koje su inače definisane nad
skalarima, na svim elementima neke matrice (vektora)
Od matrično-vektorskih funkcija navešćemo sledeće (za preostale funkcije i ostale detalje konsultovati Help):
rows(M) - daje kao rezultat broj redova matrice M cols(M) - daje kao rezultat broj kolona matrice M length(v) - daje kao rezultat broj elemenata vektora v last(v) - daje indeks poslednjeg elementa vektora v rank(M) - daje kao rezultat rang matrice M (kvadratne ili pravougaone)
submatrix(M,r1,r2,k1,k2) - izdvajanje podmatrice iz matrice M i to od vrste sa indeksom r1 do r2 i kolone sa indeksom od k1 do k2.
stack(A,B,C...) - daje kao rezultat matricu čije kolone predstavljaju spojene odgovarajuće kolone matrica A,B,C... (u redosledu odozgo, prema dole). Sve matrice moraju imati isti broj kolona.
augment(A,B,C...) - daje kao rezultat matricu čije vrste predstavljaju spojene odgovarajuće vrste matrica A,B,C... (u redosledu s leva na desno). Sve matrice moraju imati isti broj vrsta.
lsolve(A,b) - daje kao rezultat rešenje saglasnog određenog kvadratnog sistema linearnih jednačina Ax = b ( rangA = n = m).
Rešavanje SLJ pomo ću Solve Block-a
U Mathcad-u se za rešavanje SLJ može koristiti i tzv. Solve Block. Treba naglasiti da je ovaj način, u principu, namenjen rešavanju sistema nelinearnih algebarskih jednačina.
Solve Block omogućuje rešavanje saglasnih,
• kvadratnih (n = m) i pravougaonih (n ≠ m) SLJ

125
• određenih i neodređenih (jedan set vrednosti ostalih, za odabrane vrednosti slobodnih promenljivih) SLJ
Solve Block-a počinje sa Given a završava se pozivom funkcije Find. Argumenti funkcije Find su imena nepoznatih čija se rešenja traže, razdvojene zarezima (npr. x1, x2 , x3). Funkcija Find kao rezultat vraća vektor rešenja (vektor x). Između Given i Find je definisan SLJ koji se rešava i to ne pomoću operatora za dodelu vrednosti ( :=) nego pomoću relacionog operatora jednako (=) iz Boolean kompleta alata. Solve Block zahteva polazne procene nepoznatih, zato što se podrazumeva sistem nelinearnih jednačina. U slučaju kada se rešava SLJ, mada su polazne procene obavezne, njihove vrednosti su irelevantne i mogu se odabrati bilo kakve vrednosti (na primer, što je najlakše, sve nulte vrednosti).
Primer: (Mathcad)
x
0.75
0.055
0.172
=x lsolve A b,( ):=
Resenje- Funkcija lsolve
x
0.75
0.055
0.172
=x A
1−b⋅:=
Resenje- Matricni racun
Sistem je saglasan i ima jedinstveno resenje: (rang = broj promenljivih)
rank augment A b,( )( ) 3=rank A( ) 3=
- determinanta matriceA 256−=
- broj kolonam 3=m cols A( ):=
- broj redovan 3=n rows A( ):=
b
3
2−
5
:=A
5
3−
6
2
8−
6
5−
4
1
:=
A x⋅ b
Kvadratni sistem
ORIGIN 1:=

126
Solve block
x1 0:= x2 0:= x3 0:= 1. Polazne procene
Given 2. Pocetak Solve Block-a
A
x1
x2
x3
⋅ b
X Find x1 x2, x3,( ):= 3. Zavrsetak Solve Block-a
Provera:
X
0.75
0.055
0.172
= A X⋅
3
2−
5
= b
3
2−
5
=
=============================================================
x4 0:=x3 0:=x2 0:=x1 0:=
broj stepeni sloboded 1=d cols A( ) rank A( )−:=
Sistem je saglasan i ima beskonacno mnogo resenja (rang < broj promenljivih)
rank augment A b,( )( ) 3=rank A( ) 3=
Matrica sistema je singularnaA 0=
Ne moze na ovaj nacin x =xx A1−
b⋅:= A1−Resenje
b
3
3
5
10−
:=A
6
6
6
12−
6
6
6
12−
5−
5−
1
2−
2
1−
5
10−
:=
Kvadratni sistem - saglasan i neodredjen

127
Given
A
x1
x2
x3
x4
⋅ b
X Find x1 x2, x3, x4,( ):=
X
0.778
0
0.333
0
= A X⋅
3
3
5
10−
= b
3
3
5
10−
=
Kako se vidi iz prethodnog primera, Mathcad daje jedno od beskonačno mnogo rešenja. Pri tom je odabranoj slobodnoj promenljivoj (tako da rezultujući redukovan kvadratni SLJ bude saglasan) dodeljena nulta vrednost. Međutim, pošto se u rešenju ovog primera javljaju dve nulte vrednosti, za promenljive x2 i x4, ne možemo da zaključimo koja od njih je odabrana kao slobodna promenljiva.
Korisnik može sam da bira slobodne promenljive i njihove vrednosti, koje definiše unutar Solve Block-a. Pri tom je važno naglasiti, da je dozvoljen izbor onaj, koji za rezultat ima nesingularnu (r x r) submatricu matrice sistema A (r = rangA), kao matricu redukovanog SLJ, koji sadrži preostale nepoznate (vidi rešavanje saglasnog neodređenog SLJ u Pogl. 5.5). Ako taj uslov nije zadovoljen, rezultujući redukovani SLJ će biti nesaglasan jer je rang matrice sistema manji od ranga r proširene matrice. Fiksirajmo, u prethodnom primeru, na primer, promenljivu x1.
x1 0:= x2 0:= x3 0:= x4 0:=
Given
Unutar solve block-a mogu figurisati visejednacina (nejednacina) nego sto imamo promenljivihA
x1
x2
x3
x4
⋅ b
x1 3 fiksirana promenljiva
X Find x1 x2, x3, x4,( ):=
X
3
2.222−
0.333
0
= A X⋅
3
3
5
10−
= b
3
3
5
10−
=

128
Dobili smo jedno od rešenja neodređenog saglasnog sistema. Izbor promenljive x4 kao slobodne, međutim nije dozvoljen:
Primer: Mathcad
x1 0:= x2 0:= x3 0:= x4 0:=
Given
A
x1
x2
x3
x4
⋅ b
x4 fiks
X Find x1 x2, x3, x4,( ):=X Find x1 x2, x3, x4,( ):= X =X
Ovakav sistem se ne moze resiti. Ako pogledamo rezultujuci sistem.
A
x1
x2
x3
fiks
⋅
6 x1⋅ 6 x2⋅ 5 x3⋅−+ 20+
6 x1⋅ 6 x2⋅ 5 x3⋅− 10−+
6 x1⋅ 6 x2⋅+ x3+ 50+
12− x1⋅ 12 x2⋅− 2 x3⋅− 100−
→ b
3
3
5
10−
=
matrica sistema vektor rezultata
Sada je A1 X⋅ b1 gde su:
b1 b
17−13
45−90
−:=A1
6
6
6
12−
6
6
6
12−
5−5−
1
2−
:=
rank A1( ) 2= rank augment A1 b1,( )( ) 3=
U sledećem primeru su ilustrovane sledeće mogućnosti:
• kao argument funkcije Find smo koristili vektor nepoznatih x. Ovo je korisno ako imamo veliki broj jednačina u sistemu

129
• nulte polazne procene se realizuju dodeljivanjem nulte vrednosti samo poslednjem elementu vektora x4. Mathcad automatski dodeljuje nulte vrednosti svim prethodnim, nedefinisanim elementima vektora.
Primer: Mathcad
Pravougaoni sistem - vise jednacina od promenljivih
A
1
3
2
4
3−
2−
8−
2−
5
10
2
16
5
3
4
8
3−
10−
8
1−
1
2
1
12−
:= b
12
8−
1
2
8
10−
:=
rank A( ) 4= rank augment A b,( )( ) 4=
d cols A( ) rank A( )−:= d 0= sistem je saglasan i odredjen
x4 0:=
Given
A x⋅ b
X Find x( ):=
X
1.221
0.775
2.204−
3.5
= A X⋅
12
8−
1
2
8
10−
= b
12
8−
1
2
8
10−
=

130
ZADACI 5.1 a) Polazeći od (5.3c) dokazati da važi:
TTTT ABCABC =)(
b) Date su matrice:
−
−=
−−
−=
−−−
=202
031
211
,
123
341
215
,
214
132
311
CBA
Koristeći Mathcad alat za transponovanje matrice, sa datim matricama proveriti pravila:
(1) TTT BABA +=+ )( , (2) TTT ABAB =)( , (3) TTTT ABCABC =)(
c) Pokazati, koristeći Mathcad alat da je matrica DDT simetrična, gde je :
=
3422
31771
4113
D
5.2 a) Dokazati da važi:
111111 )()(,)( −−−−−−
==TT AAABCABC
b) Koristeći Matcad funkciju rank uveriti se da su matrice A,B i C iz prethodnog zadatka nesingularne (regularne)
c) Koristeći Mathcad alate proveriti, na matricama iz prethodnog zadatka pravila:
(1) )det()det( AA =T , (2) )det(/1)det( 1 AA =
− , (3) BAAB detdet)det( ⋅=
(4) AA =−− 11)( , (5) 111)( −−−
= ABAB , (6) 1111)( −−−−
= ABCABC
5.3 Koristeći Mathcad alate i funkcije, izračunati matricu X iz jednačine:
EAXEA +=− )2(
gde je E jedinična matrica (generisati je funkcijom identity ), a A je matrica:
=
101
432
210
A

131
Rešenje:
−−=
1055.0
613
15.005
X
5.4 U lekciji V Praktikuma, date su: funkcija za zamenu dve vrste matrice, Zamvrsta i funkcija za množenje neke vrste matrice skalarom a, Vrstaxa. Dodaćemo im i funkciju za treću elementarnu transformaciju nad vrstama matrice: dodavanje vrste j pomnožene skalarom a, vrsti i :
Vplusv A i, j, a,( ) A AT←A i⟨ ⟩ A i⟨ ⟩ a A j⟨ ⟩⋅+←A AT←
Areturn
:=
a) Koristeći date funkcije za izvođenje elementarnih transformacija, izvesti na matrici A
−−
−−
=1042
1113
5131
0123
A
sledeće transformacije, redom: (1) treću vrstu, pomnoženu sa 5, dodati prvoj, (2) pomnožiti drugu vrstu sa 4, (3) zameniti drugu i treću vrstu. Rezultujuća matrica je matrica B. Kakve su (međusobno) matrica A i B? Mogu li one imati različite rangove?
b) Iste transformacije izvesti na jediničnoj matrici istog reda, sa matricom P kao rezultatom i onda proveriti Teoremu 3.
5.5 Po ugledu na funkcije za izvođenje elementranih transformacija nad vrstama (prethodni zadatak) definisati funkcije: Zamkol, Kolxa, Kplusk za izvođenje istih transformacija na kolonama. Zapaziti da su one kraće, jer nije neophodno transponovanje matric, pošto Mathcad ima alat za rad sa kolonama neke matrice kao sa vektorima.
a) Formirati matricu Q, takvu da se množenjem matrice A iz prethodnog zadatka tom matricom, realizuju sledeće transformacije na matrici A, redom: (1) Zamena prve i treće kolone, (2) Oduzimanje prve od četvrte kolone, (3) Deljenje četvrte kolone sa 2. 5.6 Za ekvivalentne matrice A i B se kaže da su slične, ako postoji regularna matrica P takva da je :
APPB 1−=
Matrica P se zove matrica transformacije ili transformišuća matrica.
a) Dokazati (teorijski) da slične matrice imaju jednake determinante.
b) Uveriti se da je matrica:

132
−−−−−−=
21212121
21212121
21212121
21212121
T
ortogonalna.
b) Pokazati da se matrica:
−−
−−
=0111
1011
1101
1110
A
transformacijom T-1AT , prevodi u dijagonalnu matricu D. Kakve su (međusobno) matrice A i D?
c) Izračunati na osnovu Teoreme 1 determinantu matrice D.
d) Uveriti se da matrice A i D imaju jednake determinante (koristiti Mathcad-alat).
5.7 a) Koliki, najviše, može biti rang matrice:
−−−−−−−−−−−−−−−−−
=
121111
572106
134852
220112
211321
A
b) Odrediti njen stvarni rang, koristeći funkcije Zamvrsta i Gaus (Glava V u Paraktikumu) i uporedi rezultat sa onim dobijenim funkcijom rank . c) Koliko linearno nezavisnih kolona ima matrica A? Koliki je broj linearno nezavisnih vrsta matrice?
d) Odabrati jedan set nezavisnih vrsta (kolona) i napisati (u opštem obliku) jednačine kojima se ostale vrste (kolone) date matrice mogu dobiti od nezavisnih vrsta (kolona).
5.8 Data je matrica:
=
3422
31771
1104
4113
aA
a) Odrediti a tako da matrica ima najmanji rang. b) Koliki je njen rang za ostale vrednosti a. Rešenje: a) 0 b) 3
5.9 Koristeći funkcije Zamvrsta, Gaus i Vrstaxa (Glava V u Paraktikumu), izvršiti inverziju matrice:

133
=
10957
91068
5657
78710
A
Gaus-Žordanovim postupkom i proveriti rezultat.
5.10 Koristeći Mathcad alat i funkciju augment, proveriti na najbrži način da li su međusobno ortogonalni vektori:
−−=
−−=
−
−=
=
1
1
1
1
,
5.1
5.1
5.1
5.1
,
2
2
2
2
,
1
1
1
1
dcba
5.11 a) Koliki najviše može da bude broj linearno nezavisnih 4-dimenzionih vektora u skupu od n vektora gde je n > 4 ?
b) Odrediti stvarni maksimalan broj linearno nezavisnih vektora u skupu:
−=
−=
−=
=
−
−=
2
2
1
2
,
3
4
3
3
,
1
2
2
1
,
3
0
3
2
,
0
4
2
1
edcba
Rešenje: b) 4
5.12 a) Pokazati da je maksimalan broj linearno nezavisnih vektora k u skupu:
[ ] [ ] [ ] [ ]4826,2413,4628,2314 4321 −−=−−=−−=−−=TTTT aaaa
jednak 2. b) U datom skupu vektora naći sve moguće baze k - dimenzionog potprostora, k = 2 . Koristiti za to mogućnost "deljenja" dva vektora u Mathcad-u čiji je rezultat vektor, čiji su elementi količnici odgovarajućih elemenata prvog i drugog vektora.
Rešenje: a) Mathcad: A stack a1 a2, a3, a4,( ):= rank A( ) 2=
b) (a1,a3), (a1,a4), (a2,a3), (a2,a4)
5.13 a) Pokazati da je u sistemu reakcija:
OHCOOOHCH
HCOOHCH
HOCHOHCH
OHOCHOOHCH
2223
23
223
2223
223)4(
2)3(
)2(
21)1(
+=+
+=
+=
+=+
22
222
223
2423
21)8(
21)7(
)6(
)5(
COOCO
OHOH
OHHCOOHOOHCH
OHCHHOHCH
=+
=+
+=+
+=+
(najveći) broj linearno nezavisnih reakcija jednak 6

134
b) Korišćenjem funkcija rank i submatrix uveriti se da se kao jedan set nezavisnih reakcija mogu uzeti reakcije (1) - (6) Rešenje: a) Mathcad : rank S( ) 6= b) Mathcad : rank submatrix ST 0, 5, 0, 8,( )( ) 6=
5.14 Pokazati, koristeći funkciju rank da je sledeći sistem jednačina:
45554
23333
02
12
54321
54321
54321
54321
=+−−+
=+−−+
=−++−
=+−−+
axxxxx
bxxxxx
xxxxx
xxxxx
a) za a = 7, b = 4 nesaglasan b) za a = 6, b = 5 nesaglasan c) za a = 6, b = 4 saglasan i ima 2 stepena slobode
5.15 Ispitati da li je sledeći sistem jednačina saglasan i određen
72322
1423
632
123
4321
4321
4321
4321
=−+−−
=+++−
=+++
=+−−
xxxx
xxxx
xxxx
xxxx
i ako jeste, rešiti ga (1) pomoću Mathcad alata (2) koristeči funkciju lsolve
Rešenje: Mathcad :
rank A( ) 4= lsolve A b,( )
2
1−
3
0
=
5.16 a) Pokazati da je sledeći sistem jednačina
058
253
8232
4223
8322
6232
421
4321
4321
4321
4321
4321
=++
=−−−
−=++−
=+−+
=−−−
=−++
xxx
xxxx
xxxx
xxxx
xxxx
xxxx
saglasan i određen.. b) Uveriti se da su prve 4 jednačine nezavisne i imajući to u vidu, naći rešenje sistema pomoću funckije lsolve. c) Rešiti polazni sistem pomoću SOLVE bloka.
5.17a) Postaviti sistem linearnih jednačina (tj. definisati matricu sistema i vektor slobodnih članova), čije rešenje daje koeficijente u linearnoj kombinaciji, kojom se vektor e u Zadatku 5.11 dobija iz ostala 4 vektora. b) uveriti se da je taj sistem saglasan i određen

135
c) izračunati te koeficijente pomoću funkcije lsolve i proveriti rešenje
Rešenje: a) Mathcad : abcd augment a b, c, d,( ):= b) Mathcad : rank abcd( ) 4=
c)Mathcad:
lsolve abcd e,( )
0
0
1−
1
=
5.18a) Postaviti sisteme linearnih jednačina, čija rešenja daje koeficijente u linearnim kombinacijama, kojima se reakcije (7) i (8) u Zadatku 5.13 dobijaju iz prethodnih reakcija. b) uveriti se da su to saglasni i određeni sistemi c) izračunati te koeficijente pomoću dva SOLVE bloka i proveriti rešenja d) izračunati tražene koeficijente u jednom SOLVE bloku
Rešenje: a) Mathcad:
A submatrix S 0, 8, 0, 5,( ):=
r7 S 6⟨ ⟩:= r8 S 7⟨ ⟩:=
b) Mathcad:
rank A( ) rank augment A r7,( )( ) 1=
rank A( ) rank augment A r8,( )( ) 1= c) Mathcad: A λ 7⋅ r 7,A λ 8⋅ r 8 d) Mathcad: A λ⋅ augment r7 r 8,( ) 5.19 a) Uveriti se da sistemi reakcija: I II
OO
HH
HOHOH
OHOH
2
2
5.0
5.0
2
2
22
222
=
=
+=
+=
HOOOH
OHHOH
OHHHOH
OHHOH
+=+
+=+
+=+
+=
2
2
22
2
sadrže samo nezavisne reakcije. b) Koristeći SOLVE blok, pronaći linearne kombinacije, kojima se reakcije sistema II dobijaju iz reakcija sistema I i proveriti rešenja.
Rešenje: a) Mathcad :rank S1( ) 4= rank S2( ) 4=
b) Mathcad : S1 λ⋅ S2
5.20 a) Proveriti saglasnost sledećih sistema jednačina.
1)
732
21084
532
4
32
321
31
321
=+−
−=++
=+
=+−
xx
xxx
xx
xxx
2)
42232
626
033
54321
54321
54321
−=+−−+−
=−++−
=+++−
xxxxx
xxxxx
xxxxx

136
3)
1392
4182473
034
4321
4321
4321
=+++
=−++
=−++
xxxx
xxxx
xxxx
4)
04844
2
5432
02
4321
321
321
4321
=++−
=++
=+−
=++−
xxxx
xxx
xxx
xxxx
b) Rešive sisteme rešiti pomoću SOLVE bloka. Za neodređene sisteme dobiti jedan skup rešenja, sa proizvoljnim izborom vrednosti slobodnih promenljivih.
5.21 Sledeći sistem jednačina
194.02.12.0
33.04.01.0
47.04.01.0
66.05.0
43
432
321
21
=+
=++
=++
=+
xx
xxx
xxx
xx
rešiti Tomasovim postupkom i to a) direktnom realizacijom algoritma u Mathcad-u b) korišćenjem funkcije Th (Praktikum, XVI-4)
Rešenje: a),b)
=
12.0
25.0
32.0
5.0
X