Embed Size (px)
Citation preview

Actuadores eléctricos - Motores Servomotores
Un servomotor es básicamente un actuador mecánico que contine un motor eléctrico y un conjunto de engranajes que permiten multiplicar el torque del sistema final y tiene la capacidad de ser controlado, tanto en velocidad como en posición.
53
Actuadores

Actuadores eléctricos - Motores Servomotores
Un servomotor es capaz de ubicarse en cualquier posición dentro de un rango de operación (generalmente de 180˚) y mantenerse estable en dicha posición. Los servos se suelen utilizar en robótica, automatización y modelismo (vehículos por radio control) debido a su gran precisión en el posicionamiento.
54
Actuadores
Actuadores eléctricos - Motores Servomotores
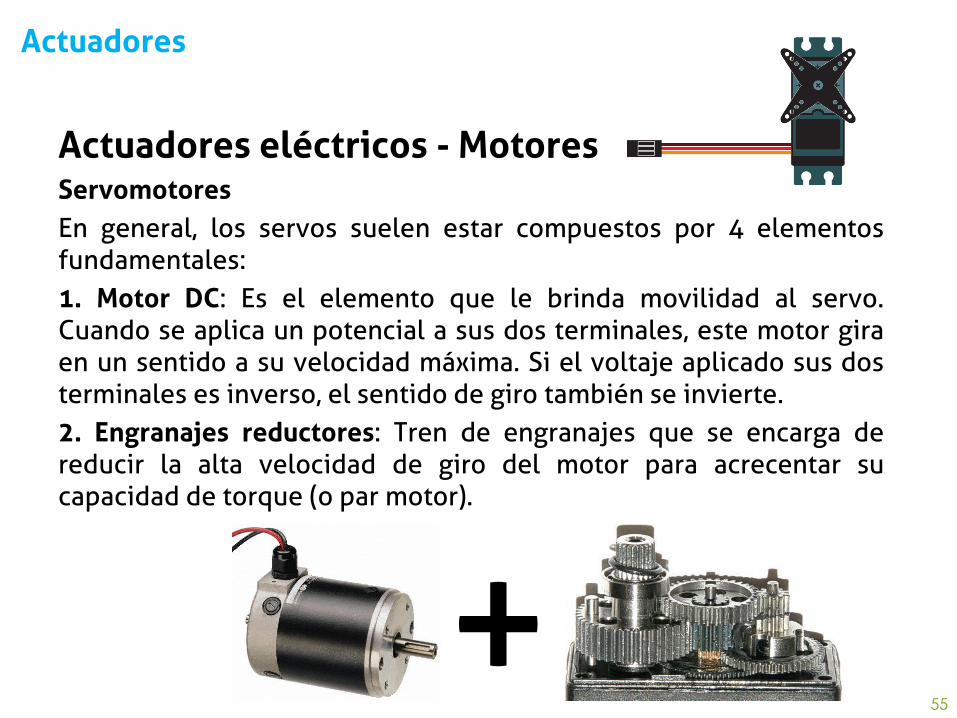
En general, los servos suelen estar compuestos por 4 elementos fundamentales:
1. Motor DC: Es el elemento que le brinda movilidad al servo. Cuando se aplica un potencial a sus dos terminales, este motor gira en un sentido a su velocidad máxima. Si el voltaje aplicado sus dos terminales es inverso, el sentido de giro también se invierte.
2. Engranajes reductores: Tren de engranajes que se encarga de reducir la alta velocidad de giro del motor para acrecentar su capacidad de torque (o par motor).
55
Actuadores
+
Actuadores eléctricos - Motores Servomotores
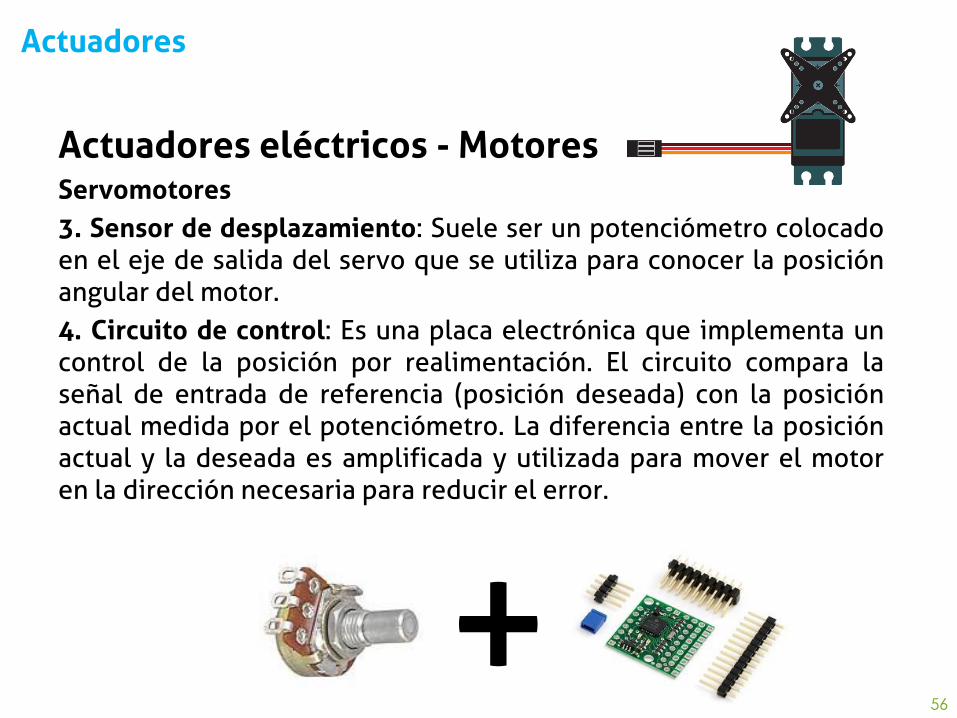
3. Sensor de desplazamiento: Suele ser un potenciómetro colocado en el eje de salida del servo que se utiliza para conocer la posición angular del motor.
4. Circuito de control: Es una placa electrónica que implementa un control de la posición por realimentación. El circuito compara la señal de entrada de referencia (posición deseada) con la posición actual medida por el potenciómetro. La diferencia entre la posición actual y la deseada es amplificada y utilizada para mover el motor en la dirección necesaria para reducir el error.
56
Actuadores
+
Actuadores eléctricos - Motores Servomotores
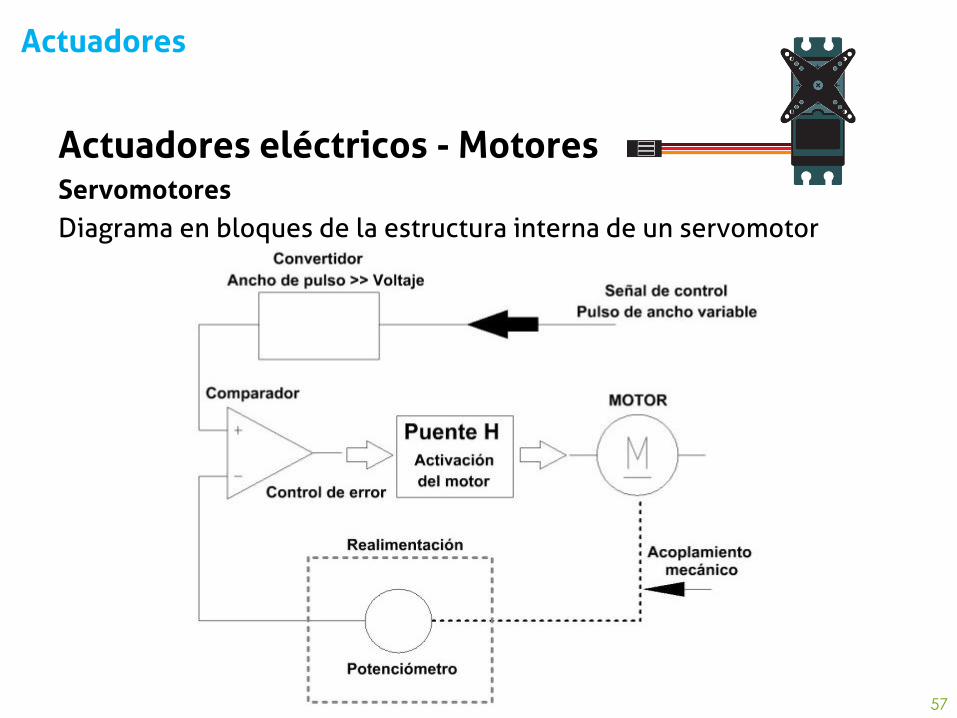
Diagrama en bloques de la estructura interna de un servomotor
57
Actuadores
Actuadores eléctricos - Motores Servomotores
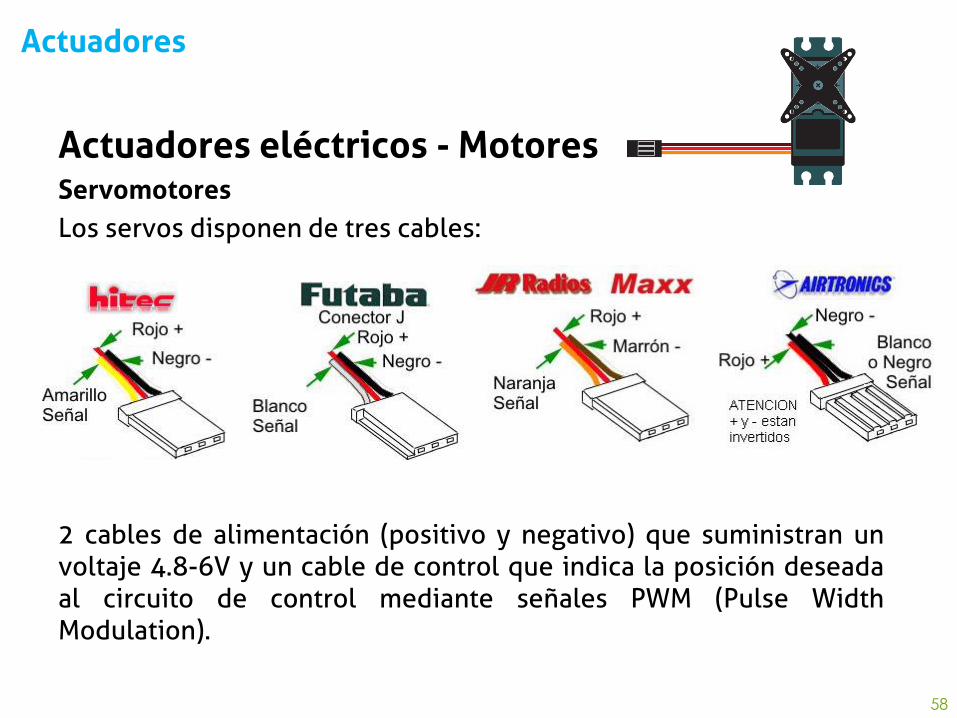
Los servos disponen de tres cables:
2 cables de alimentación (positivo y negativo) que suministran un voltaje 4.8-6V y un cable de control que indica la posición deseada al circuito de control mediante señales PWM (Pulse Width Modulation).
58
Actuadores
Actuadores eléctricos - Motores Servomotores
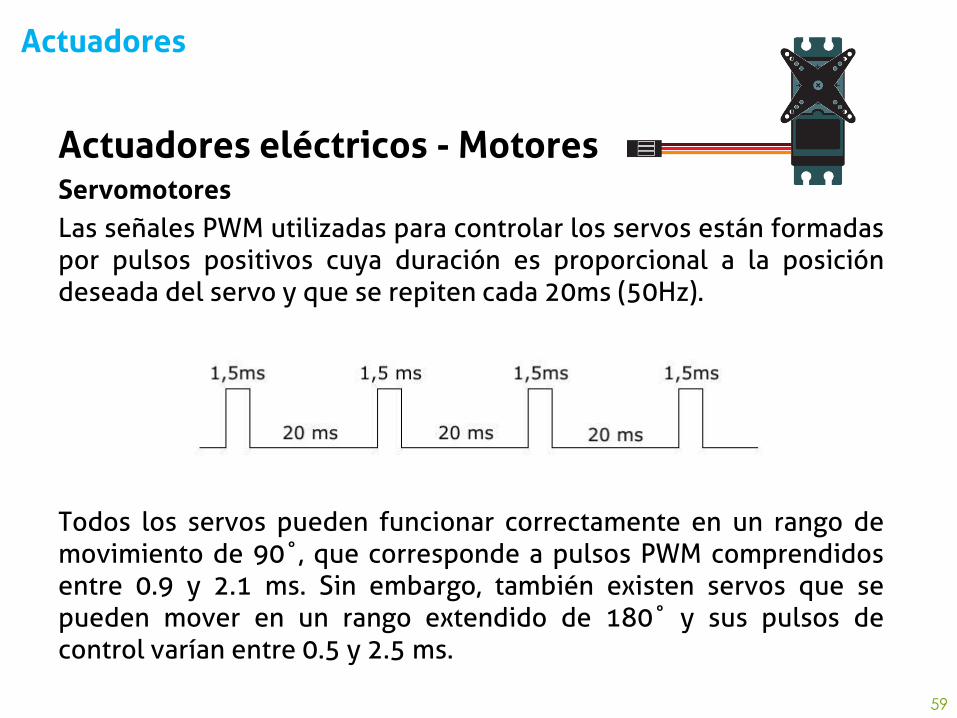
Las señales PWM utilizadas para controlar los servos están formadas por pulsos positivos cuya duración es proporcional a la posición deseada del servo y que se repiten cada 20ms (50Hz).
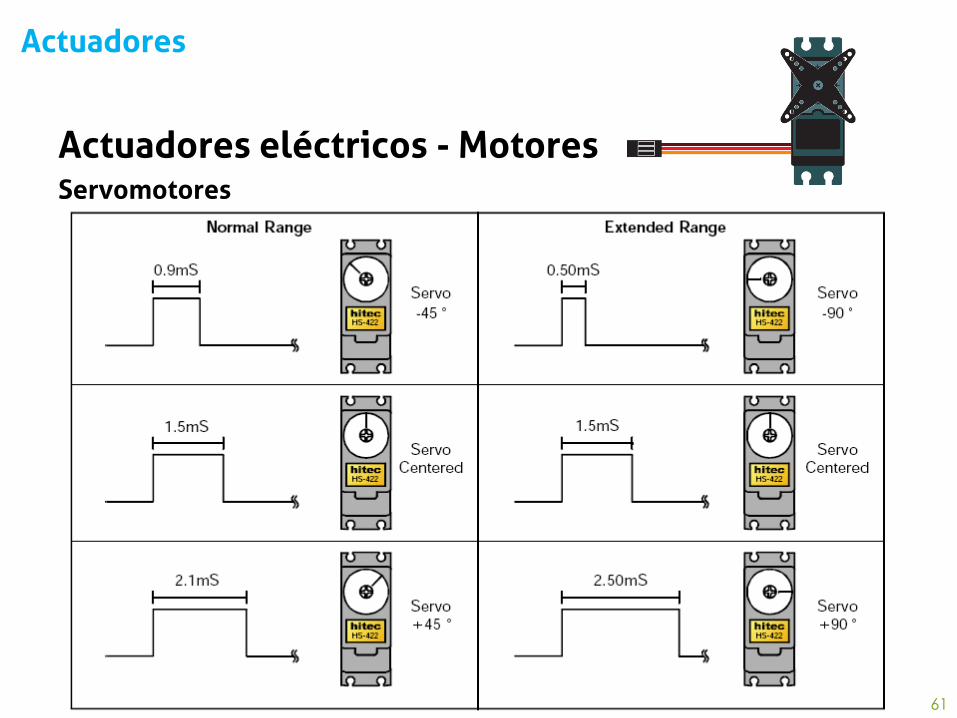
Todos los servos pueden funcionar correctamente en un rango de movimiento de 90˚, que corresponde a pulsos PWM comprendidos entre 0.9 y 2.1 ms. Sin embargo, también existen servos que se pueden mover en un rango extendido de 180˚ y sus pulsos de control varían entre 0.5 y 2.5 ms.
59
Actuadores
Actuadores eléctricos - Motores Servomotores
60
Actuadores
Actuadores eléctricos - Motores Servomotores
61
Actuadores
Actuadores eléctricos - Motores Servomotores
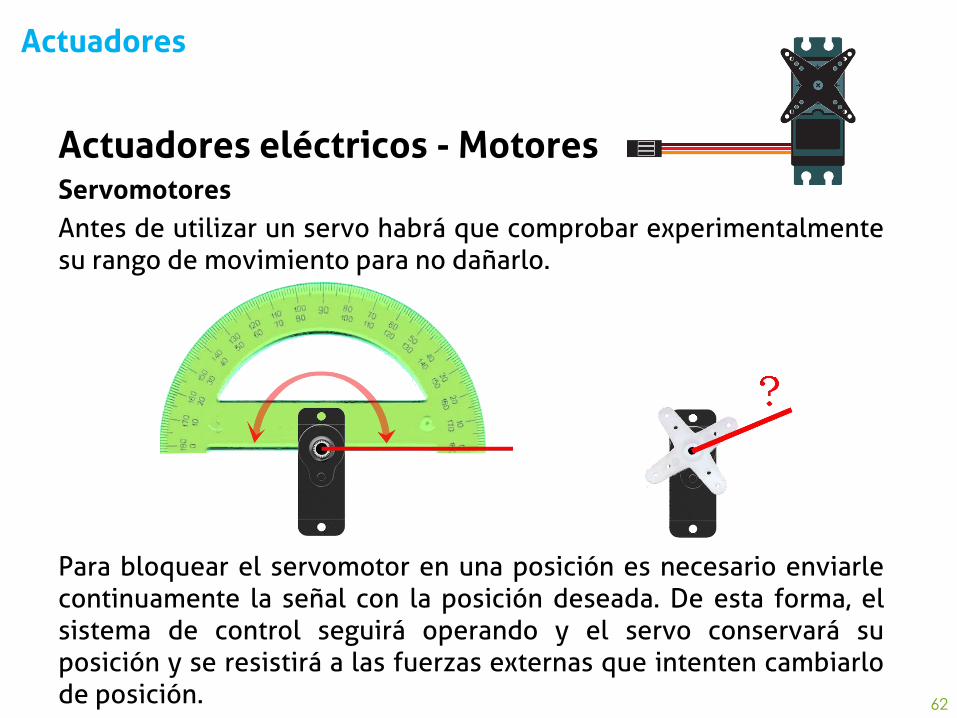
Antes de utilizar un servo habrá que comprobar experimentalmente su rango de movimiento para no dañarlo.
Para bloquear el servomotor en una posición es necesario enviarle continuamente la señal con la posición deseada. De esta forma, el sistema de control seguirá operando y el servo conservará su posición y se resistirá a las fuerzas externas que intenten cambiarlo de posición.
62
Actuadores
Actuadores eléctricos - Motores Servomotores
Supongamos que queremos mover el servo a -45 grados. Para controlarlo se debe calcular el ancho del pulso:
En -90 grados = 0.5ms, en +90 grados = 2.5ms, por lo que el -45 grados = 1ms.
También es posible dejar de enviar pulsos después que el servo se ha movido a su posición. Pero, si dejamos de enviar pulsos por más de 50ms (dependiendo del servo), este podría caerse, lo que significa que no se estaría aplicando ninguna entrada al motor.
63
Actuadores
Actuadores eléctricos - Motores Servomotores
64
Actuadores
Actuadores eléctricos - Motores PWM
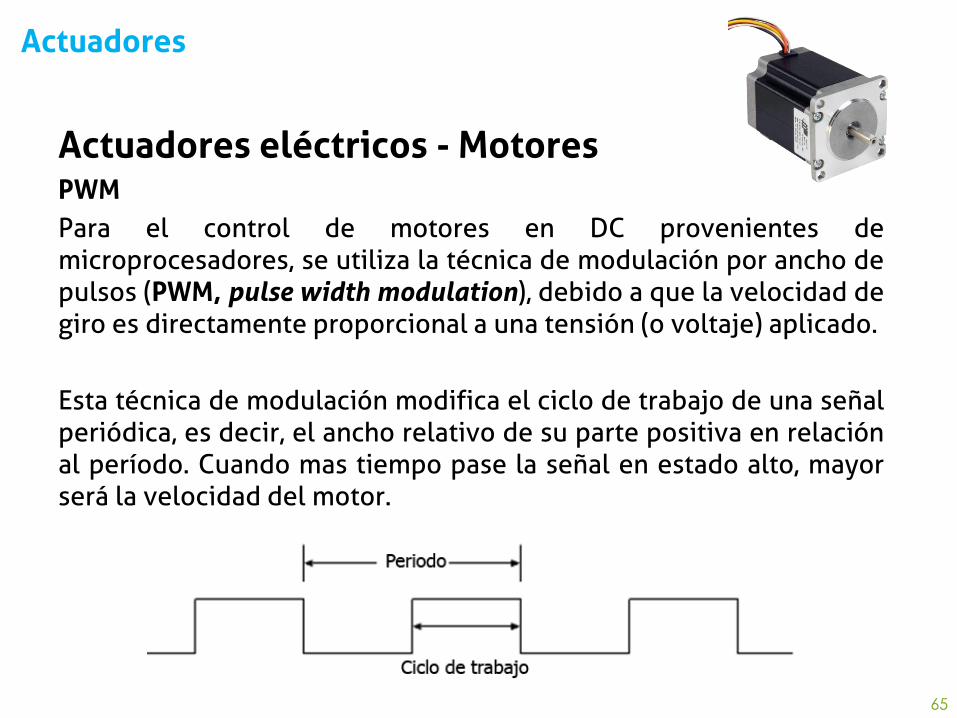
Para el control de motores en DC provenientes de microprocesadores, se utiliza la técnica de modulación por ancho de pulsos (PWM, pulse width modulation), debido a que la velocidad de giro es directamente proporcional a una tensión (o voltaje) aplicado.
Esta técnica de modulación modifica el ciclo de trabajo de una señal periódica, es decir, el ancho relativo de su parte positiva en relación al período. Cuando mas tiempo pase la señal en estado alto, mayor será la velocidad del motor.
65
Actuadores
Actuadores eléctricos - Motores PWM
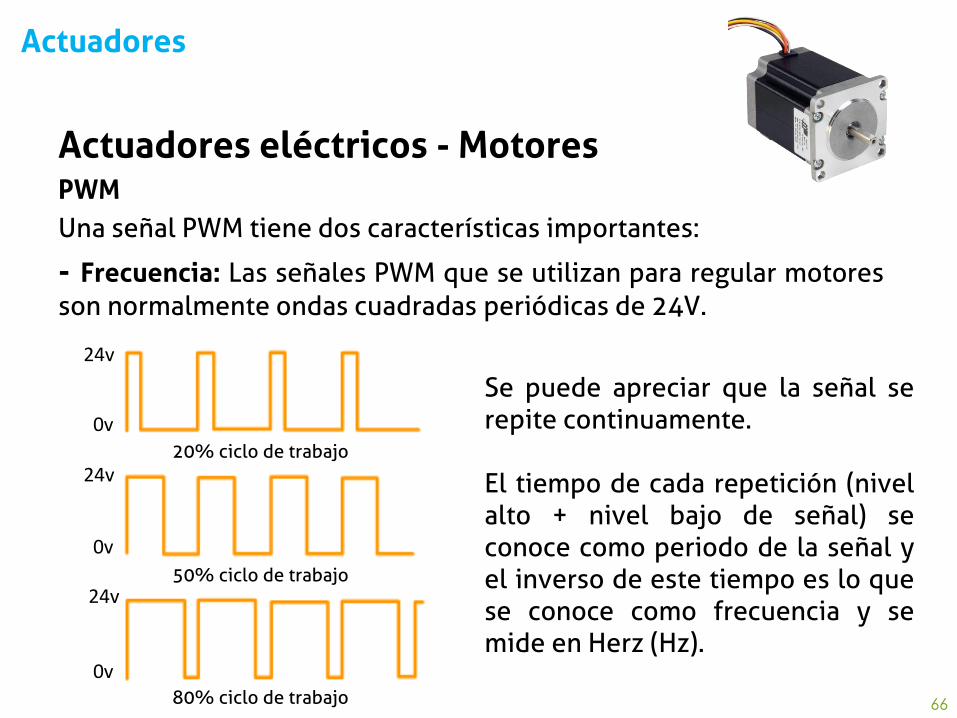
Una señal PWM tiene dos características importantes:
- Frecuencia: Las señales PWM que se utilizan para regular motores
son normalmente ondas cuadradas periódicas de 24V.
66
Se puede apreciar que la señal se repite continuamente. El tiempo de cada repetición (nivel alto + nivel bajo de señal) se conoce como periodo de la señal y el inverso de este tiempo es lo que se conoce como frecuencia y se mide en Herz (Hz).
24v
24v
24v
0v
0v
0v
20% ciclo de trabajo
50% ciclo de trabajo
80% ciclo de trabajo
Actuadores
Actuadores eléctricos - Motores PWM
- Ciclo de trabajo (duty cycle): La proporción del tiempo que está la señal a nivel alto con respecto al tiempo que está a nivel bajo en cada periodo es lo que se conoce como ciclo de trabajo.
Esto es lo que realmente afecta a la velocidad del motor. Así, un regulador PWM de velocidad de cualquier motor, lo que hace realmente para variar la velocidad, es variar el ciclo de trabajo.
67
Actuadores
Actuadores eléctricos - Motores PWM
68
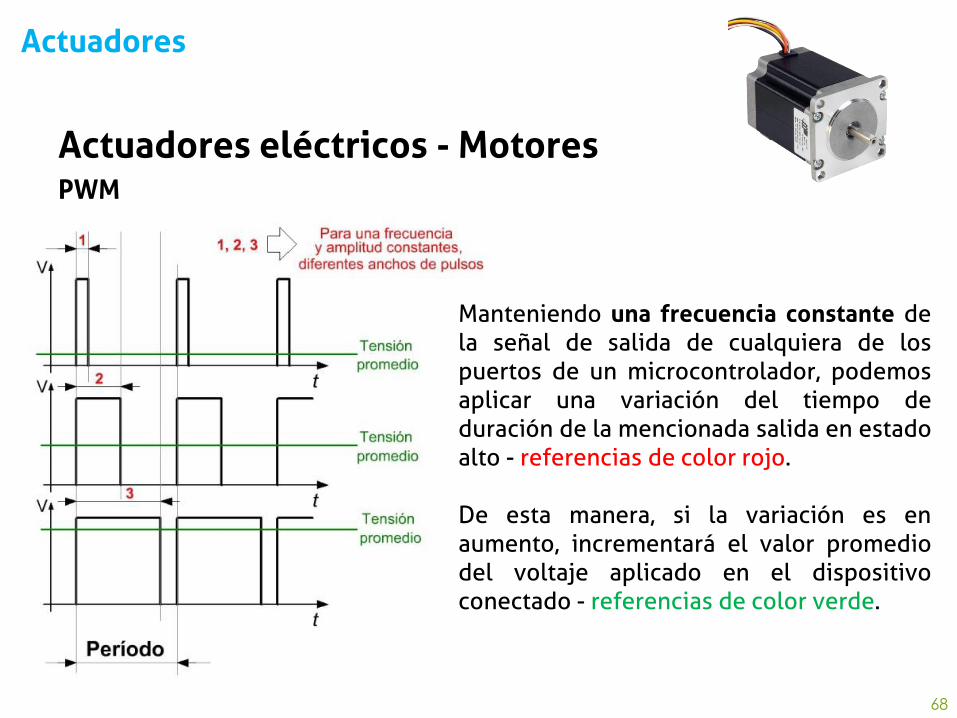
Manteniendo una frecuencia constante de la señal de salida de cualquiera de los puertos de un microcontrolador, podemos aplicar una variación del tiempo de duración de la mencionada salida en estado alto - referencias de color rojo. De esta manera, si la variación es en aumento, incrementará el valor promedio del voltaje aplicado en el dispositivo conectado - referencias de color verde.
Actuadores
Actuadores eléctricos - Motores PWM
El uso de un microcontrolador con modulo de PWM tiene varias ventajas sobre un circuito analógico, como lo son la precisión y un mejor control de las variables involucradas; además de espacio y ahorro de energía.
En caso de controlar cargas mayores, se puede conectar un transistor de potencia a la salida del microcontrolador, para levantar los 5V de salida.
69
Actuadores
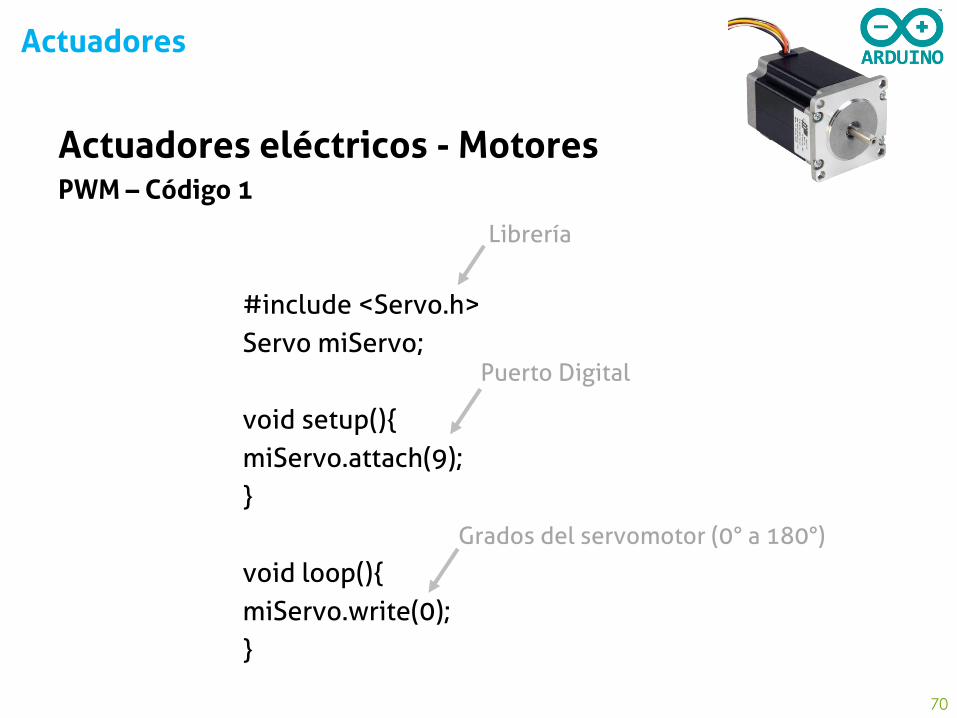
Actuadores eléctricos - Motores PWM – Código 1
#include <Servo.h>
Servo miServo;
void setup(){
miServo.attach(9);
}
void loop(){
miServo.write(0);
}
70
Actuadores
Puerto Digital
Grados del servomotor (0° a 180°)
Librería

Actuadores eléctricos - Motores PWM – Código 2
#include <Servo.h>
Servo miServo;
int pos = 0;
void setup() {
miServo.attach(9); }
void loop() {
for (pos = 0; pos <= 180; pos += 1) {
miServo.write(pos);
delay(15); }
for (pos = 180; pos >= 0; pos -= 1) {
miServo.write(pos);
delay(15); }
} 71
Actuadores
Variable para almacenar la posición del servo
Puerto Digital
Va de 0 grados a 180 grados, pasos de 1 grado
Decirle al servo que vaya a la variable “pos”
Va de 180 grados a 0 grados, pasos de 1 grado
Librería
Decirle al servo que vaya a la variable “pos”
Tiempo-Velocidad
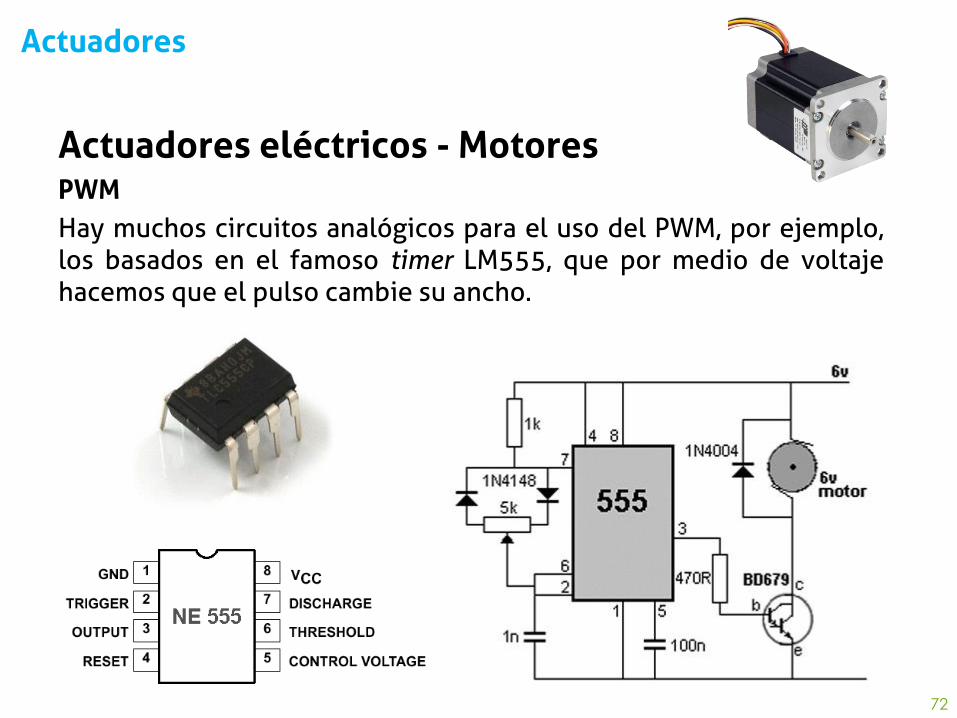
Actuadores eléctricos - Motores PWM
Hay muchos circuitos analógicos para el uso del PWM, por ejemplo, los basados en el famoso timer LM555, que por medio de voltaje hacemos que el pulso cambie su ancho.
72
Actuadores
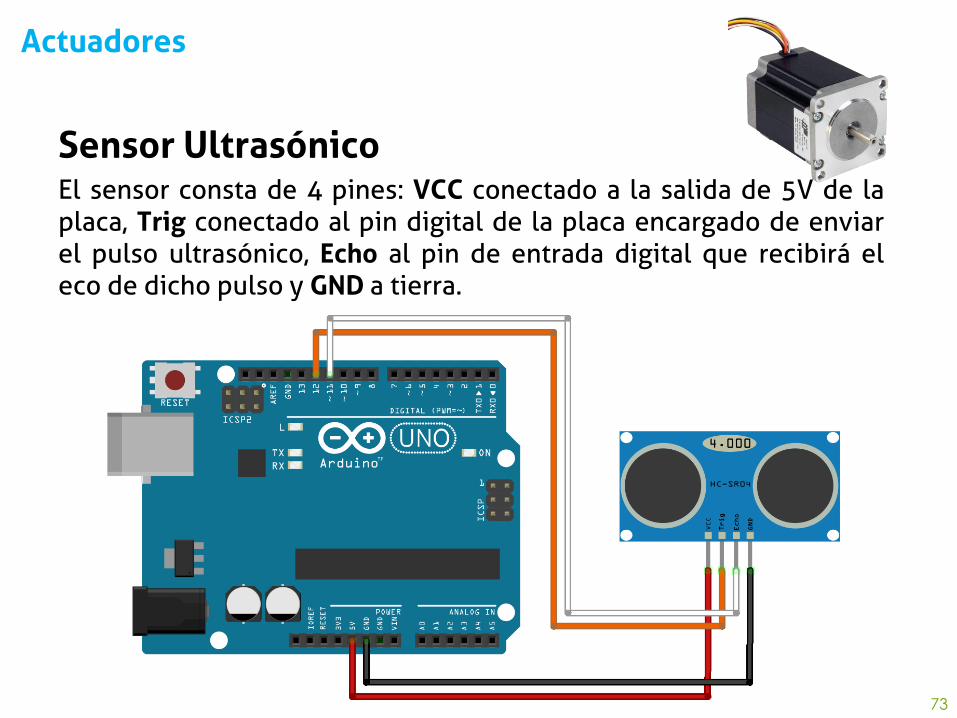
Sensor Ultrasónico El sensor consta de 4 pines: VCC conectado a la salida de 5V de la placa, Trig conectado al pin digital de la placa encargado de enviar el pulso ultrasónico, Echo al pin de entrada digital que recibirá el eco de dicho pulso y GND a tierra.
73
Actuadores
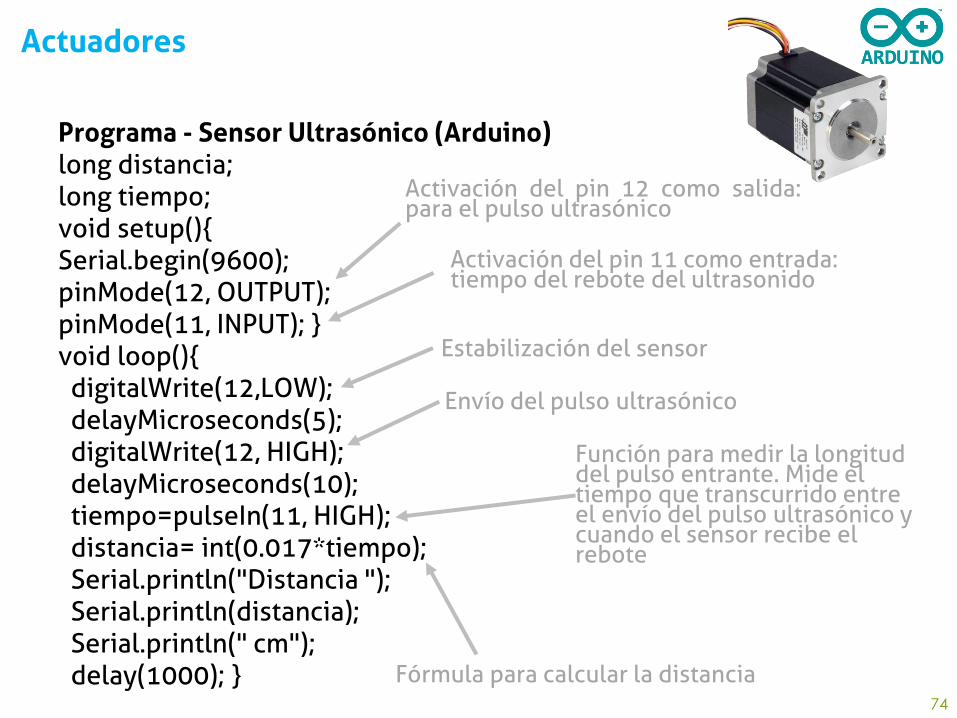
Programa - Sensor Ultrasónico (Arduino) long distancia; long tiempo; void setup(){ Serial.begin(9600); pinMode(12, OUTPUT); pinMode(11, INPUT); } void loop(){ digitalWrite(12,LOW); delayMicroseconds(5); digitalWrite(12, HIGH); delayMicroseconds(10); tiempo=pulseIn(11, HIGH); distancia= int(0.017*tiempo); Serial.println("Distancia "); Serial.println(distancia); Serial.println(" cm"); delay(1000); }
74
Actuadores
Activación del pin 12 como salida: para el pulso ultrasónico
Activación del pin 11 como entrada: tiempo del rebote del ultrasonido
Estabilización del sensor
Envío del pulso ultrasónico
Función para medir la longitud del pulso entrante. Mide el tiempo que transcurrido entre el envío del pulso ultrasónico y cuando el sensor recibe el rebote
Fórmula para calcular la distancia
Proyecto de laboratorio 8
75
76
Proyecto de laboratorio 8
Diseñar un pequeño robot bípedo que utilice dos servomotores para el movimiento de sus piernas y un sensor ultrasónico para la detección de objetos.
Objetivo: Objetivo:
Características del sistema: • El movimiento de las piernas será mediante servomotores. • El sensor ultrasónico permitirá detectar un objeto; al detectar el objeto,
el robot bípedo deberá esquivarlo y continuar hacia adelante.
Proyecto de laboratorio 8
77
Entrega del proyecto: • Tiempo de 1 hora y 30 minutos para entregar el proyecto. • Lunes 14/11 se presentará el primer avance y se aclaran dudas. • Jueves 17/11 se realizará la octava entrega. • Documentación en formato de artículo IEEE a doble columna, entregarla
antes de comenzar la siguiente clase después de presentar el proyecto. • Documentación sin haber aprobado la entrega, no se acepta.
83
(ʘ‿ʘ)