Embed Size (px)
Citation preview
Univerza v Ljubljani
Fakulteta za matematiko in fiziko
Umetni sateliti Zemlje Seminar
Avtor : Aleš Česen
Mentor : prof. Tomaž Zwitter
Slika 1: Sputnik.[1]
Kranj, Januar 2008
Povzetek Gibanje telesa v gravitacijskem polju drugega masivnega točkastega telesa lahko popolnoma opišemo s šestimi Keplerjevimi elementi orbite. Podobno opišemo gibanje umetnih satelitov okoli Zemlje. Vendar pa elementi orbite nikakor niso konstante. Stalno se spreminjajo pod vplivom različnih sil zaradi anomalije polja Zemlje, gravitacije ostalih teles (Luna, Sonce, …), upora atmosfere, svetlobnega tlaka itd. Da bi satelit obdržali v želeni orbiti ga moramo stalno nadzirati in popravljati z lastnim pogonom.
Aleš Česen: Umetni sateliti Zemlje
2
Kazalo
1. Uvod ............................................................................................................................................3
2. Elementi orbite ...........................................................................................................................3 2.1. Velika polos ................................................................................................................................... 3 2.2. Ekscentričnost ................................................................................................................................ 3 2.3. Kot dvižnega vozla ......................................................................................................................... 4 2.4. Inklinacija ...................................................................................................................................... 4 2.5. Kot perigeja.................................................................................................................................... 4 2.6. Anomalija....................................................................................................................................... 4
3. Sile...............................................................................................................................................5 3.1. Gravitacija Zemlje .......................................................................................................................... 6 3.2. Plimske sile .................................................................................................................................... 7 3.3. Vpliv svetlobnega tlaka................................................................................................................... 9 3.4. Upor atmosfere............................................................................................................................. 10 3.5. Pogonske sile................................................................................................................................ 10
4. Geostacionarni sateliti ..............................................................................................................12 4.1. Razvoj geostacionarne orbite ........................................................................................................ 13
5. Nizko orbitalni sateliti ..............................................................................................................14 5.1. Sistemi satelitov ........................................................................................................................... 14 5.2. Heliosinhrone orbite ..................................................................................................................... 15 5.3. Ocena višine orbite iz opazovanj................................................................................................... 16
6. Eliptične orbite .........................................................................................................................17
7. TLE (Two Line Element) .........................................................................................................19
8. Zaključek ..................................................................................................................................20
9. Liter atur a..................................................................................................................................20

Aleš Česen: Umetni sateliti Zemlje
3
1. Uvod Letos smo praznovali 50 letnico izstrelitve prvega umetnega satelita Zemlje. 4. oktobra 1957 je takratna Sovjetska zveza v orbito poslala Sputnik. Kljub temu, da okoli Zemlje krožijo umetni sateliti šele pol stoletja, proučevanja orbit satelitov segajo vsaj 2 stoletji nazaj. S pomočjo Newtonovih zakonov za gravitacijo so se mnogi ukvarjali z analitičnimi razlagami gibanja edinega Zemljinega naravnega satelita, Lune. Danes se okoli Zemlje sprehaja na tisoče aktivnih in tudi že odpisanih satelitov. Samo v geostacionarni orbiti jih je preko 300 aktivno delujočih. [2]
2. Elementi or bite Preden se dotaknemo vseh sil ki delujejo na satelit in mu s tem določajo gibanje ter orbito, si poglejmo kako najbolj preprosto opišemo takšno orbito.
Gibanje telesa v gravitacijskem polju planeta ali zvezde, je popolnoma določeno z njegovo pozicijo 0 ( ) t r in hitrostjo 0 ( ) t v ob nekem določenem času 0 t . Orbito telesa nam tako očitno določa šest
neodvisnih parametrov. Najpogostejša izbira je šest Keplerjevih elementov orbite. [3]
2.1. Velika polos Velika polos orbite a nam pove sámo dimenzijo orbite, ki je odvisna od celotne energije:
2 1 2 1 2
tot GmM E mv r
GmM a
= −
= − (2.1)
Če je energija našega sistema (npr. satelit in Zemlja) enaka nič, je vrednost polosi neskončna (1/ 0 a = ) in naša orbita dobi obliko parabole. Orbite dolgo periodnih kometov velikokrat aproksimiramo s parabolo. V kolikor je energija pozitivna in nimamo vezanega sistema, je vrednost polosi negativna (1/ 0 a < ), oblika orbite pa hiperbolična. Taka telesa se na določeni razdalji od Sonca ali Zemlje gibljejo hitreje od ubežne hitrosti. V našem seminarju bodo sateliti imeli negativno energijo, torej eliptične orbite z navadno zelo majhno ekscentričnostjo.
Tu je potrebno omeniti, da namesto velike polosi a lahko navedemo tudi kak drug podatek o satelitu, na primer srednje gibanje n
3
GM n a
⊕ = , (2.2)
ali orbitalno periodo P
3
2 a P GM
π ⊕
= (2.3)
2.2. Ekscentričnost Ekscentričnost e nam pove obliko orbite, ki je lahko elipsa (0 1 e ≤ < ), parabola ( 1 e = ) ali hiperbola ( 1 e > ), kar je opisano že v prejšnjem odstavku.

Aleš Česen: Umetni sateliti Zemlje
4
2.3. Kot dvižnega vozla Kot dvižnega vozla Ω je kot med pomladiščem 1 in presečiščem ravnin ekvatorja in orbite. Ω nam našo orbito vrti okoli normale ravnine ekliptike, za primer kroženja planeta okoli Sonca, oziroma okoli ekvatorialne ravnine, v našem primeru kroženja satelita okoli Zemlje. (glej Slika 2)
2.4. Inklinacija Inklinacija i ja kot nagiba orbita glede na ekvatorialno ravnino. Inklinacija vrti orbito okoli osi, ki povezuje dvižni in spustni vozel. (glej Slika 2)
2.5. Kot perigeja Kot ω nam orientira veliko polos elipse oz. perigej glede na dvižni vozel. (glej Slika 2)
Slika 2: Koti ki določajo orientacijo orbite in satelita v prostoru. [3]
2.6. Anomalija S prejšnjimi elementi smo orbito objekta oz. satelita popolnoma definirali. Sedaj nam je preostal samo še podatek, kje se satelit na tej orbiti nahaja v danem trenutku. Anomalija je tako kot objekta v ravnini orbite, ki se meri od perigeja v smer gibanja tega objekta. Definicij anomalij imamo kar tri, prava anomalija ν , ekscentrična anomalija E (glej Slika 3) in srednja anomalija M .
Slika 3: Definicija prave in ekscentrične anomalije.
1 Pomladišče je smer tiste točke presečišča ekliptike in nebesnega ekvatorja, kjer se ekliptika dvigne nad ekvator proti severu (dvižni vozel).
Aleš Česen: Umetni sateliti Zemlje
5
Ker imata obe, prava in ekscentrična anomalija zapleteno časovno odvisnost, se velikokrat navaja tudi srednjo anomalijo, ki jo definiramo tako, da ima linearno časovno odvisnost:
( ) p M n t t = − , (2.4)
Kjer je p t čas satelita v perigeju, n pa srednje gibanje satelita, ki ga izračunamo iz tretjega Keplerjevega zakona (glej enačbo (2.2)).
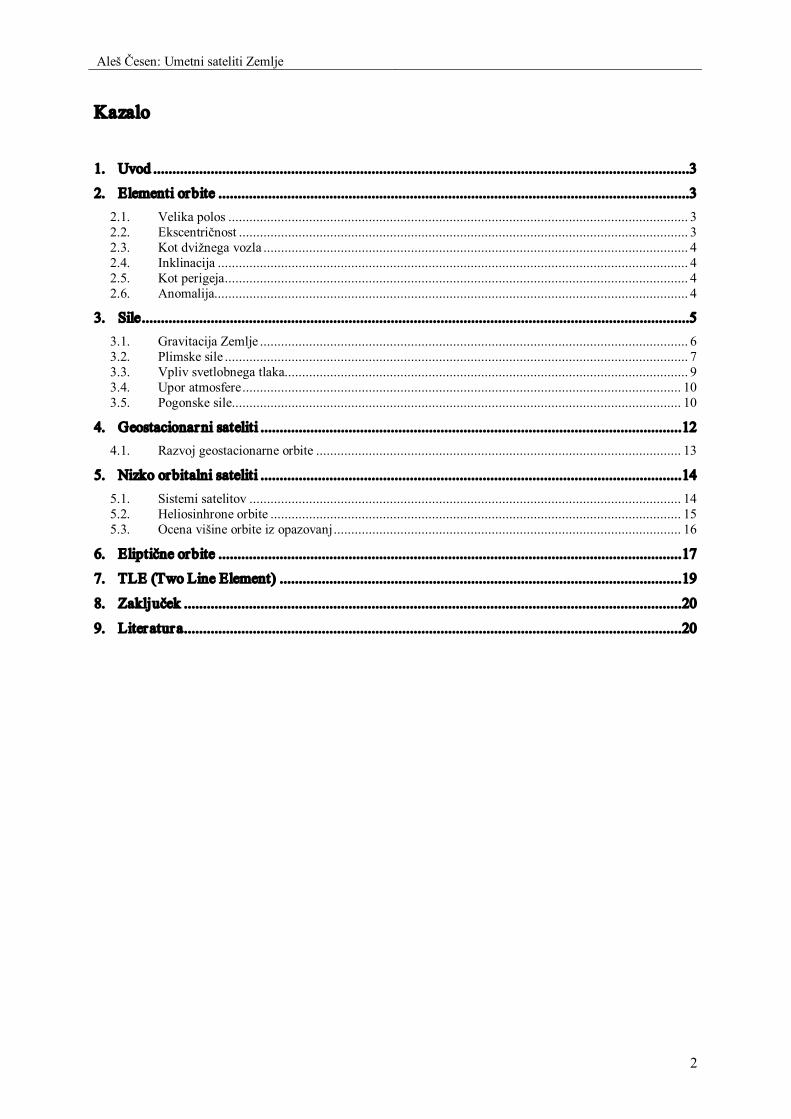
3. Sile Kako se bo satelit gibal okoli Zemlje je seveda odvisno zgolj od sil, ki delujejo nanj. Tu pa bi storili veliko napako če bi dejali, da se giblje lepo po Keplerjevih zakonih. Zemlja nikakor ni lepo okroglo telo in masa v njen ni razporejena tako kot bi si želeli. Tudi atmosfera Zemlje seže globoko v vesolje in vpliva predvsem na nizko orbitalne satelite. Tu sta še gravitacijski sili Lune in Sonca, ki na satelit vplivata neposredno in posredno ko s plimskimi silami spreminjata sámo obliko Zemljinega površja. Tudi svetloba Sonca deluje z nezanemarljivo silo na objekte. V prav vse podrobnosti se ne bomo spuščali, za orientacijo, kako pomembne so različne vrste sil,. pa imejmo pred naslednji graf:
Slika 4: Velikostni red pospeška na satelit v odvisnosti od razdalje (od polosi orbite). [2]

Aleš Česen: Umetni sateliti Zemlje
6
3.1. Gravitacija Zemlje Gravitacijski potencial je definiran s potencialno energijo testne mase m % :
p E mU = − % (3.1)
V najbolj grobem približku Zemljo obravnavamo kot homogeno okroglo telo. Vsako tako telo, ali pa telo katerega gostota ρ v sferičnem koordinatnem sistemu je samo funkcija radija ( ( ) r ρ ρ = ), ima preprost gravitacijski potencial:
( ) GM U r
⊕ = r (3.2)
Ta potencial velja seveda le za prostor zunaj samega planeta in je enak kot za točkasto telo z enako maso. V splošnem pa gravitacijski potencial zapišemo z integralom po izvorih
( ') ( ) ' '
U G dV ρ =
− ∫ r r r r
(3.3)
Slika 5: Integriramo znotraj označenega območja z izvori ' V , ki nam določa gravitacijsko polje. [4]
Ker opazujemo potencial izven Zemlje, je ' r r < , kar omogoča smiseln razvoj
0 1 2 2
1 1 1 ' ' (cos ) (cos ) (cos ) ' ' 2 'cos
n
n r r P P P
r r r r r rr δ δ δ
δ
= = + + + + − + − r r … … (3.4)
Koeficienti pri razvoju po ( '/ ) n r r so Legendrovi polinomi ( ) n P x . Tako očitno pri razvoju ( ) U r po
1/ n r nastopijo Legendrovi polinomi. Ker merimo gravitacijsko silo izven Zemlje, kjer ni izvorov, iščemo enostavne rešitve Laplaceove enačbe v sferičnih koordinatah:
2 2 2
2 2 2 2 2
1 1 1 sin 0 sin sin
U U U U r r r r r r
ϑ ϑ ϑ ϑ ϑ ϕ
∂ ∂ ∂ ∂ ∂ ∇ = + + ≡ ∂ ∂ ∂ ∂ ∂ (3.5)
Za rešitve predpostavim da so separabilne in dobim:
( 1)
cos( ) (cos )
sin( )
l
lm l
m r U P
m r ϕ
ϑ ϕ − +
=
, (3.6)
kjer so , l m cela nenegativna števila in m l ≤ . (cos ) lm P ϑ so prirejene Legendrove funkcije. Vsaka taka rešitev nam predstavlja točkastega multipola: 0 l = monopol, 1 l = dipol, 2 l = kvadrupol, 3 l = oktopol.
Potencial Zemlje na koncu predstavimo kot vsoto prispevkov posameznih multipolov. Ker nas zanimajo le notranji izvori, nam od enačbe (3.6) ostanejo le členi z ( 1) l r − + :
0 0
(cos )( cos sin ) l l
lm lm lm l m
GM R U P C m S m r r
ϑ ϕ ϕ ∞
⊕ ⊕
= =
= +
∑ ∑ , (3.7)

Aleš Česen: Umetni sateliti Zemlje
7
kjer sta M ⊕ in R ⊕ masa in dogovorjeni radij Zemlje 2 . Če izberemo za središče koordinatnega sistema
0 r = težišče Zemlje, avtomatično dosežemo
10 11 11 0 C C S = = ≡ (3.8)
Najnižji prispevek k monopolnemu členu je tako kvadrupolni člen z največjim koeficientom 3
20 0.484165 10 C − = − ⋅ (3.9)
Čim večje število teh multipolnih koeficientov nam čim bolj natančno opisuje dejansko gravitacijsko polje Zemlje. Za najbolj natančne račune se uporablja člene do vključno 360 l = . Upoštevanje teh členov nam da dodatni pospešek satelita v velikostnem redu 2 2 10 / a m s − ∆ ∼ . [4]
Ponavadi nas zanima gibanje satelitov v rotirajočem sistemu, ki se vrti skupaj z Zemljo s kotno hitrostjo 5 1
0 7, 292115 10 s ω − − = ⋅ . Tako je dejanski efektivni potencial
2 2 0
1 2
U U r ω ⊥ = + % , (3.10)
Kjer je r ⊥ oddaljenost od osi vrtenja. Tu pa nikakor ne smemo pozabiti tudi na Coriolisovo silo C F , ki je odvisna od hitrosti satelita:
0 0 ( ) C m = − × × F ω ω r (3.11)
3.2. Plimske sile Plimski potencial je posledica zunanjih izvorov kot so sile Lune in Sonca. Do plimskih sil pride v vsakem sistemu, ki pospešuje v nehomogenem gravitacijskem polju. Po Newtonovem zakonu zapišemo pospešek na satelit, ki ga povzroči neka točkasta masa M [2]:
3 GM −
= − s r r s r
&& , (3.12)
kjer sta r in s geocentrični koordinati našega satelita in mase M . Tu je potrebne nekaj pazljivosti, saj nam enačba (3.12) opisuje gibanje satelita v inercialnem sistemu v katerem Zemlja ni pri miru, ampak nanjo deluje pospešek istega telesa M :
3 z GM s
= s r && (3.13)
Ker želimo opisati gibanje satelita v geocentričnem sistemu moramo enačbi (3.12) in (3.13) odšteti
3 3 GM s
− = − −
s r s r s r
&& (3.14)
Ker sta Sonce in Luna veliko bolj oddaljena od Zemlje kot večina njenih umetnih satelitov ( r s = ), lahko krajevno odvisni del enačbe (3.12) poenostavimo:
3 2
3 2 2 3
1 1 1 1 3 ( ) 2 ( ) s r
s r
r s r sr s s
= ≈ + ⋅ + − ⋅ − e e
e e s r , (3.15)
kjer smo zapisali enotske vektorje:
2 Dogovorjena polos elipsoida WGS84 je 6378137.0 R m ⊕ = .
Aleš Česen: Umetni sateliti Zemlje
8
in s r s r = = s r e e (3.16)
Tako se nam enačba (3.14), če zanemarimo člene z 2 r , poenostavi v:
( ) 3 3 ( ) r s s r r GM s
≈ − + ⋅ r e e e e && (3.17)
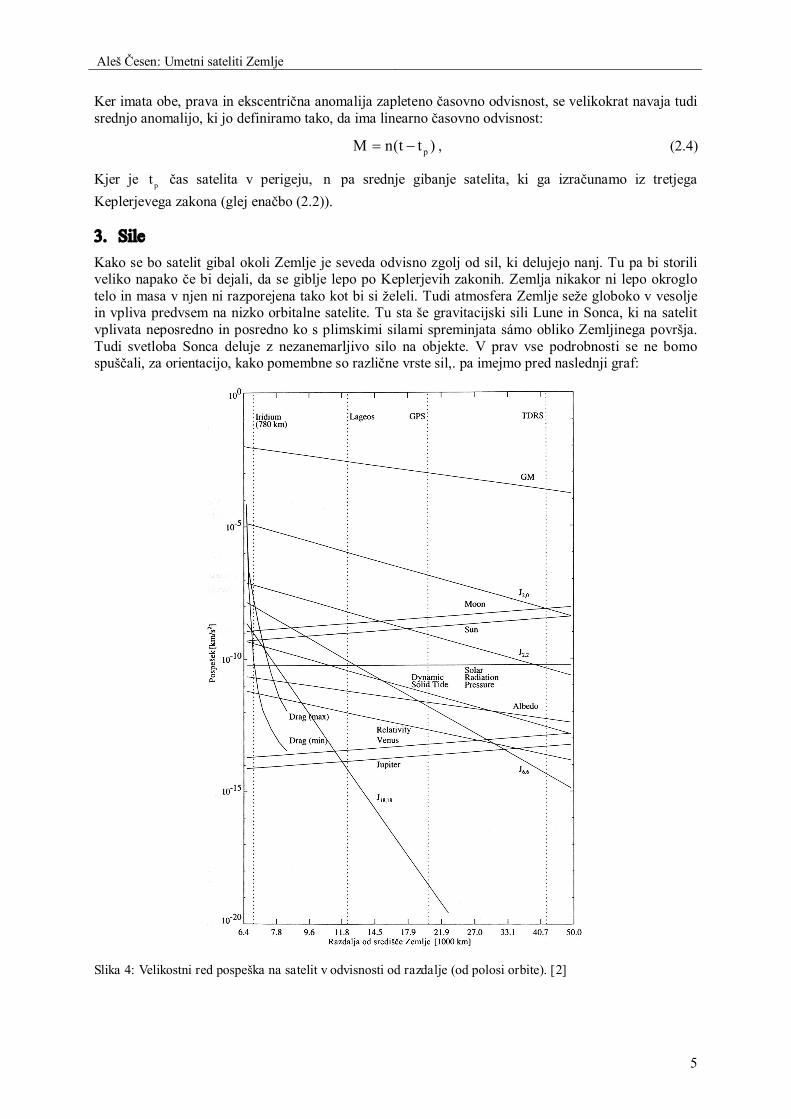
V primeru, da sta r e in s e kolinearna ( r s = ± e e ) ima zgornja enačba vrednost
3
2GM s
= r r P && , (3.18)
v primeru da pa sta r s ⊥ e e pravokotna, pa dobim
3
GM s ⊥ = − r r && (3.19)
Slika 6: Plimske sile zaradi oddaljene mase M v inercialnem sistemu (a), ter geocentričnem sistemu (b). [2]
3.2.1. Pozicija Sonca in Lune
Gravitacijske sile Sonca in Lune na Zemljine satelite so veliko šibkejše (približno faktor 7 10 − ) od privlaka Zemlje. Zaradi tega ni nujno, da poznamo pozicijo Sonca in Lune zelo natančno. Predvsem geocentrično pozicijo Sonca je precej preprosto izračunati iz njegove ekliptične dolžine λ e in trenutne razdalje Zemlja Sonce r e . Ekliptična višina Sonca β e pa je v okviru napake ene ločne minute kar
0 β = e . Tako dobimo vektor Zemlja Sonce:
cos sin cos sin sin
r r r
λ λ ε λ ε
=
r e e
e e e
e e
, (3.20)
kjer je 23 43929111 ε = ° nagnjenost Zemljine osi glede na ekliptiko, λ e in r e pa dobimo za določen datum v efemeridah, ali pa ju lahko izračunamo tudi sami [2]:
6
6892"sin 72"sin 2
(149.619 2.499cos 0.021cos 2 ) 10
M M M
r M M km
λ ω = Ω + + + +
= − − ⋅ e
e
(3.21)
kjer je

Aleš Česen: Umetni sateliti Zemlje
9
282 94 357 5256 35999 049 ( 2451545.0) / 36525.0
M T T JD
ω Ω + = ° = ° + ° ⋅ = −
(3.22)
S T smo označili število Julijanskih stoletij od 1. januarja 2000 ob 12:00, z JD pa Julijanski datum, ki ga prav tako najdemo v efemeridah.
Pri določanju pozicija Lune se opremo na podoben postopek, a rabimo precej več podatkov. Lunin tir namreč še z daleč ni tako pravilen kot Zemljin okoli Sonca, med drugim ravnina Lunine orbite precesira okoli ekliptike. Konkretne številke in enačbe za pozicijo Lune bomo tako izpustili, saj bi v nasprotnem primeru preveč krenili iz poti. Bralec pa si lahko to bolj podrobno pogleda v [2], stran 70 do 79.
3.3. Vpliv svetlobnega tlaka Pri razdalji ene astronomske enote od Sonca je gostota svetlobnega toka približno
2 1367Wm − Φ = , (3.23)
kar pomeni, da je sila na satelit približno
6 2 4.56 10 P Nm c
− − Φ = = ⋅ e (3.24)
Tak svetlobni tlak nam da pospešek na satelit velikostnega reda komaj 8 2 10 / SV a m s − ∼ , kar je 9 velikostnih redov manj kot je sila Zemlje. Tu smo privzeli, da površina satelita popolnoma absorbira vse fotone ter da je pravokotna na vpadni kot svetlobe. Za bolj splošen primer pa nam pospešek satelita zaradi svetlobnega tlaka opiše izraz [2]:
2
2
(1 ) cos (1 ) 2 cos AU A P r m
ϑ ε ε ϑ = − − + r e n e e e
&& , (3.25)
Kjer smo z A in m označili osvetljeno površino satelita in njegovo maso, ϑ je vpadni kot svetlobe, ε pa albedo površine. Enotska vektorja e e in n pa predstavljata smer Sonca ter normalni vektor osvetljene ploskve. Kosinus kota ϑ dobimo
cosϑ = ⋅ n e e (3.26)
V mnogih primerih (recimo za satelite z velikimi sončnimi celicami) zadostuje privzetek, da je površina (sončnih celic) pravokotna na vpadno valovanje s Sonca (n e e P ). V tem primeru se nam enačba (3.25) poenostavi
2 3 R
A P C AU m r
= − r
r e e
e
&& , (3.27)
kjer smo s R C označili koeficient svetlobnega tlaka:
1 R C ε = + (3.28)
Za podrobno izpeljavo enačbe (3.25) glej [2], stran 78. Pri upoštevanju sevalnega tlaka je treba biti pazljiv še na to, kdaj je satelit dejansko osvetljen, kdaj pa je v Zemljini senci ali polsenci. Enačbo (3.25) tako še dodatno množimo s funkcijo ν , ki ime vrednost 1 ν = ko je satelit osvetljen, 0 ν = ko je v senci, ter 0 1 ν < < ko je satelit v polsenci.

Aleš Česen: Umetni sateliti Zemlje
10
3.4. Upor atmosfere Sile atmosfere predstavljajo največji delež negravitacijskih sil, predvsem za nizko orbitalne satelite (glej Slika 4). Natančno modeliranje teh aerodinamičnih sil pa je precej težko iz treh razlogov. Kot prvo, fizikalne lastnosti, predvsem gostota visokih plasti ozračja niso dovolj natančno znane. Drugič je treba poznati interakcijo tako nevtralnega plina, kot tudi nabitih delcev s površinami satelitov, ki se med seboj bistveno razlikujejo. Kot tretjič pa je potrebno poznati orientacijo satelitov glede na tok delcev, kar je včasih skoraj nemogoče.
Največji del atmosferskih sil za nizko orbitalne satelite predstavlja navaden kvadratni upor, ki ima nasprotno smer smeri relativnega gibanja glede na ozračje, kar povzroča zaviranje satelita. Nekaj vpliva ima tudi dinamični vzgon, ki deluje pravokotno glede na hitrost satelita. V večini primerov se take sile zanemarijo.
Odvisnost sile upora atmosfere je dokaj preprosto določiti. Predstavljamo si stolpec atmosfere z maso m ∆ , ki se zaleti na del satelita s ploščino S v nekem časovnem intervalu t ∆ :
r m A v t ρ ∆ = ⋅ ⋅ ⋅ ∆ , (3.29)
kjer je ρ gostota ozračja na višini satelita, z r v pa smo označili relativno hitrost satelita glede na okoliško ozračje. Sunek sile p ∆ na satelit je potem
2 r r p m v S v t ρ ∆ = ∆ ⋅ = ⋅ ⋅ ⋅∆ (3.30)
Ker je sila povezana s sunkom z / F p t = ∆ ∆ , je potem zaviranje satelita zaradi ozračja [2]:
2 1 2
r D r
r
S C v m v
ρ = − ⋅ v r && , (3.31)
kjer je m masa satelita, D C pa brezdimenzijska količina ki nam opisuje interakcijo ozračja s površino satelita. Vrednosti parametra D C se gibljejo od 1.5 do 3.0 [2]. Tipični zaviralni pospeški zaradi upora
atmosfere v nizkih orbitah ( 160 h km ∼ ) so tukaj 4 2 10 / U a m s − ∼ , z naraščajočo višino pa drastično padajo (glej Slika 4). Čeprav je enačba (3.31) na las podobna tisti pri kvadratnem zakonu upora, ne gre tu za klasično aerodinamiko, saj je tipično prosta pot delcev atmosfere λ bistveno večja od dimenzije satelita l ( / 10 l λ ≥ ). Relativna hitrost satelita glede na ozračje r v je odvisna od kompleksne dinamike atmosfere. Vseeno lahko naredimo smiselno predpostavko, da se v grobem atmosfera vrti skupaj z Zemljo in zapišemo:
0 r = − × v v ω r , (3.32)
kjer je v hitrost satelita v inercialnem sistemu, r njegova pozicija, 0 ω pa vektor kotne hitrosti Zemlje. Največje opazovane razlike vektorskega produkta v enačbi (3.32) so bile velikostnega reda 40%, kar posledično pomeni napako za silo upora (3.31) manj kot 5%. [2]
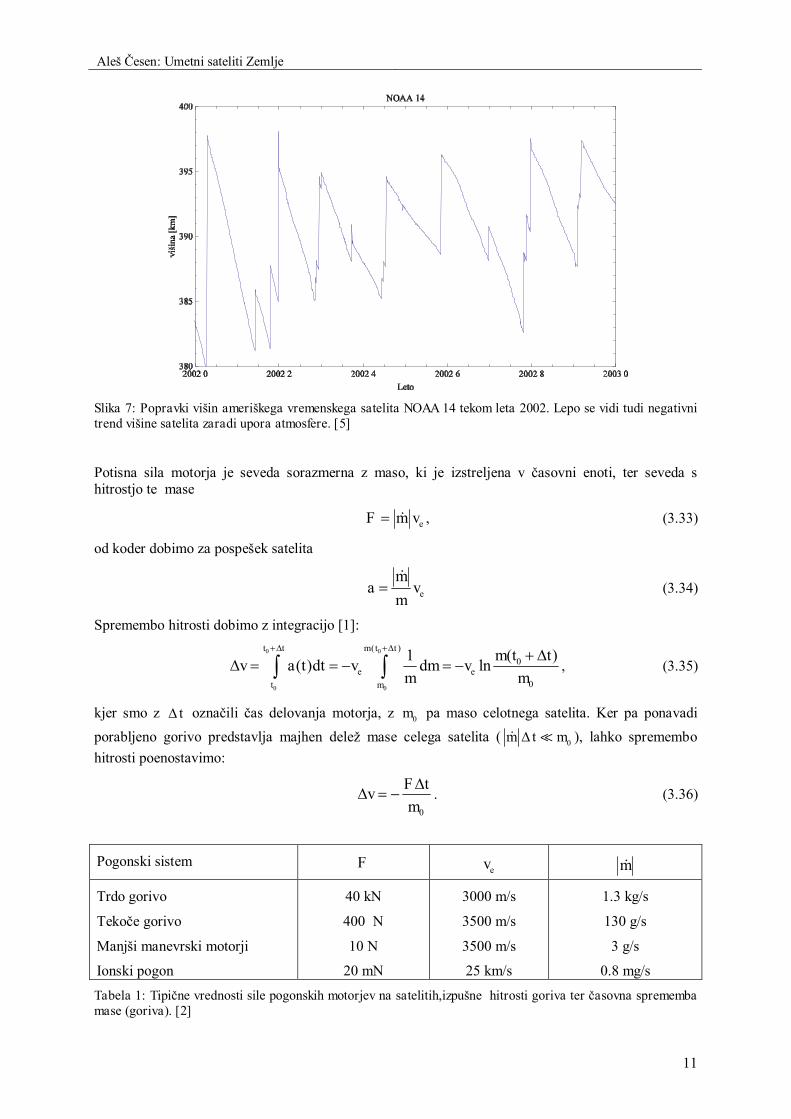
3.5. Pogonske sile Ne glede na to kako dober model smo naredili z upoštevanjem vseh vrst naravnih sil, ki so opisane v zgornjih odstavkih, na gibanje satelita lahko (in to se tudi nemalokrat dogaja) vpliva tudi sam potisni sistem satelita. Taki manevri se pogosto uporabljajo za korekcije orbite. Največkrat gre za dvig višine, katero satelit predvsem zaradi upora atmosfere počasi izgublja (glej Slika 7).
Aleš Česen: Umetni sateliti Zemlje
11
Slika 7: Popravki višin ameriškega vremenskega satelita NOAA 14 tekom leta 2002. Lepo se vidi tudi negativni trend višine satelita zaradi upora atmosfere. [5]
Potisna sila motorja je seveda sorazmerna z maso, ki je izstreljena v časovni enoti, ter seveda s hitrostjo te mase
e F m v = & , (3.33)
od koder dobimo za pospešek satelita
e
m a v
m =
& (3.34)
Spremembo hitrosti dobimo z integracijo [1]: 0 0
0 0
( ) 0
0
( ) 1 ( ) ln t t m t t
e e t m
m t t v a t dt v dm v m m
+∆ +∆ + ∆ ∆ = = − = − ∫ ∫ , (3.35)
kjer smo z t ∆ označili čas delovanja motorja, z 0 m pa maso celotnega satelita. Ker pa ponavadi porabljeno gorivo predstavlja majhen delež mase celega satelita ( 0 m t m ∆ & = ), lahko spremembo hitrosti poenostavimo:
0
F t v m ∆
∆ = − . (3.36)
Pogonski sistem F e v m &
Trdo gorivo
Tekoče gorivo
Manjši manevrski motorji
Ionski pogon
40 kN
400 N
10 N
20 mN
3000 m/s
3500 m/s
3500 m/s
25 km/s
1.3 kg/s
130 g/s
3 g/s
0.8 mg/s
Tabela 1: Tipične vrednosti sile pogonskih motorjev na satelitih,izpušne hitrosti goriva ter časovna sprememba mase (goriva). [2]
Aleš Česen: Umetni sateliti Zemlje
12
4. Geostacionarni sateliti Geostacionarni sateliti ležijo 35786 kilometrov nad ekvatorjem ter se vrtijo v isto smer kot Zemlja. S tako višino je tako njihova perioda enaka natanko enemu sideričnemu dnevu 3 in pozicija satelita glede na vrteče se Zemljino površje se ne spreminja. Najpogosteje se uporabljajo v telekomunikacijske namene, veliko pa jih je tudi vremenarskih (kot na primer Geos ali Meteosat).
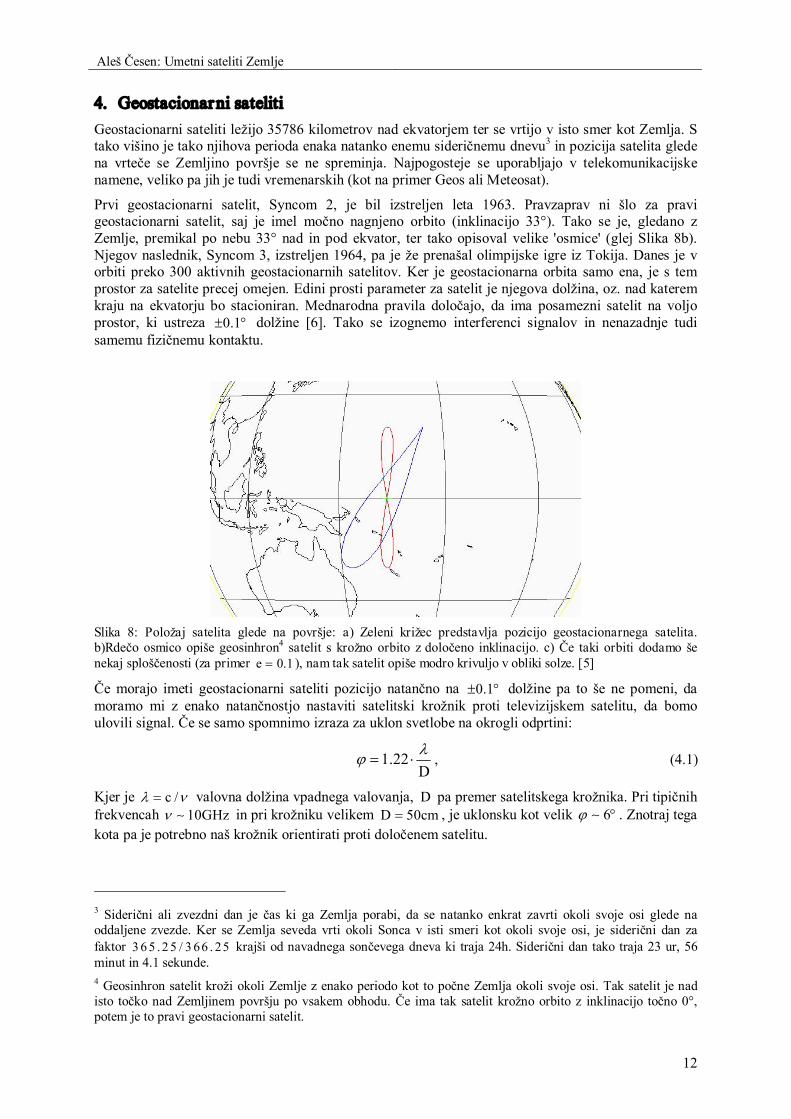
Prvi geostacionarni satelit, Syncom 2, je bil izstreljen leta 1963. Pravzaprav ni šlo za pravi geostacionarni satelit, saj je imel močno nagnjeno orbito (inklinacijo 33°). Tako se je, gledano z Zemlje, premikal po nebu 33° nad in pod ekvator, ter tako opisoval velike 'osmice' (glej Slika 8b). Njegov naslednik, Syncom 3, izstreljen 1964, pa je že prenašal olimpijske igre iz Tokija. Danes je v orbiti preko 300 aktivnih geostacionarnih satelitov. Ker je geostacionarna orbita samo ena, je s tem prostor za satelite precej omejen. Edini prosti parameter za satelit je njegova dolžina, oz. nad katerem kraju na ekvatorju bo stacioniran. Mednarodna pravila določajo, da ima posamezni satelit na voljo prostor, ki ustreza 0.1 ± ° dolžine [6]. Tako se izognemo interferenci signalov in nenazadnje tudi samemu fizičnemu kontaktu.
Slika 8: Položaj satelita glede na površje: a) Zeleni križec predstavlja pozicijo geostacionarnega satelita. b)Rdečo osmico opiše geosinhron 4 satelit s krožno orbito z določeno inklinacijo. c) Če taki orbiti dodamo še nekaj sploščenosti (za primer 0.1 e = ), nam tak satelit opiše modro krivuljo v obliki solze. [5]
Če morajo imeti geostacionarni sateliti pozicijo natančno na 0.1 ± ° dolžine pa to še ne pomeni, da moramo mi z enako natančnostjo nastaviti satelitski krožnik proti televizijskem satelitu, da bomo ulovili signal. Če se samo spomnimo izraza za uklon svetlobe na okrogli odprtini:
1.22 D λ ϕ = ⋅ , (4.1)
Kjer je / c λ ν = valovna dolžina vpadnega valovanja, D pa premer satelitskega krožnika. Pri tipičnih frekvencah 10GHz ν ∼ in pri krožniku velikem 50 D cm = , je uklonsku kot velik 6 ϕ ° ∼ . Znotraj tega kota pa je potrebno naš krožnik orientirati proti določenem satelitu.
3 Siderični ali zvezdni dan je čas ki ga Zemlja porabi, da se natanko enkrat zavrti okoli svoje osi glede na oddaljene zvezde. Ker se Zemlja seveda vrti okoli Sonca v isti smeri kot okoli svoje osi, je siderični dan za faktor 365 .25 / 366 . 25 krajši od navadnega sončevega dneva ki traja 24h. Siderični dan tako traja 23 ur, 56 minut in 4.1 sekunde. 4 Geosinhron satelit kroži okoli Zemlje z enako periodo kot to počne Zemlja okoli svoje osi. Tak satelit je nad isto točko nad Zemljinem površju po vsakem obhodu. Če ima tak satelit krožno orbito z inklinacijo točno 0°, potem je to pravi geostacionarni satelit.
Aleš Česen: Umetni sateliti Zemlje
13
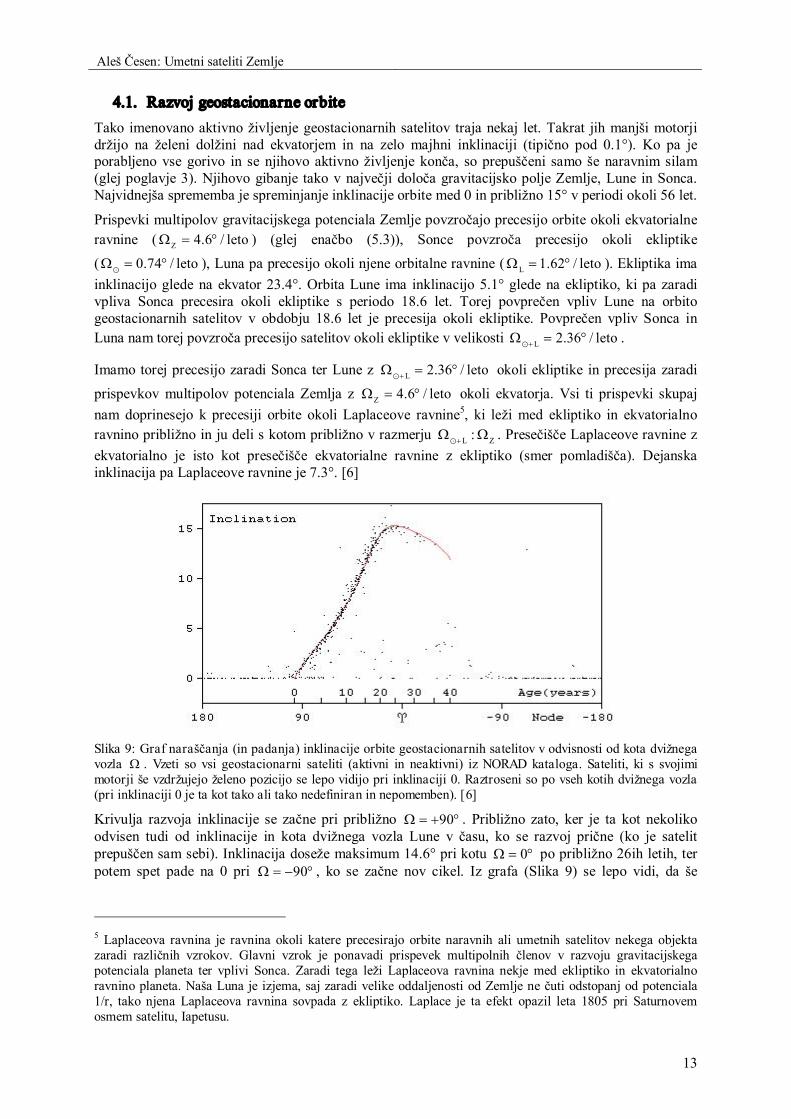
4.1. Razvoj geostacionarne orbite Tako imenovano aktivno življenje geostacionarnih satelitov traja nekaj let. Takrat jih manjši motorji držijo na želeni dolžini nad ekvatorjem in na zelo majhni inklinaciji (tipično pod 0.1°). Ko pa je porabljeno vse gorivo in se njihovo aktivno življenje konča, so prepuščeni samo še naravnim silam (glej poglavje 3). Njihovo gibanje tako v največji določa gravitacijsko polje Zemlje, Lune in Sonca. Najvidnejša sprememba je spreminjanje inklinacije orbite med 0 in približno 15° v periodi okoli 56 let.
Prispevki multipolov gravitacijskega potenciala Zemlje povzročajo precesijo orbite okoli ekvatorialne ravnine ( 4.6 / Z leto Ω = ° ) (glej enačbo (5.3)), Sonce povzroča precesijo okoli ekliptike ( 0.74 / leto Ω = ° e ), Luna pa precesijo okoli njene orbitalne ravnine ( 1.62 / L leto Ω = ° ). Ekliptika ima inklinacijo glede na ekvator 23.4°. Orbita Lune ima inklinacijo 5.1° glede na ekliptiko, ki pa zaradi vpliva Sonca precesira okoli ekliptike s periodo 18.6 let. Torej povprečen vpliv Lune na orbito geostacionarnih satelitov v obdobju 18.6 let je precesija okoli ekliptike. Povprečen vpliv Sonca in Luna nam torej povzroča precesijo satelitov okoli ekliptike v velikosti 2.36 / L leto + Ω = ° e .
Imamo torej precesijo zaradi Sonca ter Lune z 2.36 / L leto + Ω = ° e okoli ekliptike in precesija zaradi prispevkov multipolov potenciala Zemlja z 4.6 / Z leto Ω = ° okoli ekvatorja. Vsi ti prispevki skupaj nam doprinesejo k precesiji orbite okoli Laplaceove ravnine 5 , ki leži med ekliptiko in ekvatorialno ravnino približno in ju deli s kotom približno v razmerju : L Z + Ω Ω e . Presečišče Laplaceove ravnine z ekvatorialno je isto kot presečišče ekvatorialne ravnine z ekliptiko (smer pomladišča). Dejanska inklinacija pa Laplaceove ravnine je 7.3°. [6]
Slika 9: Graf naraščanja (in padanja) inklinacije orbite geostacionarnih satelitov v odvisnosti od kota dvižnega vozla Ω . Vzeti so vsi geostacionarni sateliti (aktivni in neaktivni) iz NORAD kataloga. Sateliti, ki s svojimi motorji še vzdržujejo želeno pozicijo se lepo vidijo pri inklinaciji 0. Raztroseni so po vseh kotih dvižnega vozla (pri inklinaciji 0 je ta kot tako ali tako nedefiniran in nepomemben). [6]
Krivulja razvoja inklinacije se začne pri približno 90 Ω = + ° . Približno zato, ker je ta kot nekoliko odvisen tudi od inklinacije in kota dvižnega vozla Lune v času, ko se razvoj prične (ko je satelit prepuščen sam sebi). Inklinacija doseže maksimum 14.6° pri kotu 0 Ω = ° po približno 26ih letih, ter potem spet pade na 0 pri 90 Ω = − ° , ko se začne nov cikel. Iz grafa (Slika 9) se lepo vidi, da še
5 Laplaceova ravnina je ravnina okoli katere precesirajo orbite naravnih ali umetnih satelitov nekega objekta zaradi različnih vzrokov. Glavni vzrok je ponavadi prispevek multipolnih členov v razvoju gravitacijskega potenciala planeta ter vplivi Sonca. Zaradi tega leži Laplaceova ravnina nekje med ekliptiko in ekvatorialno ravnino planeta. Naša Luna je izjema, saj zaradi velike oddaljenosti od Zemlje ne čuti odstopanj od potenciala 1/r, tako njena Laplaceova ravnina sovpada z ekliptiko. Laplace je ta efekt opazil leta 1805 pri Saturnovem osmem satelitu, Iapetusu.
Aleš Česen: Umetni sateliti Zemlje
14
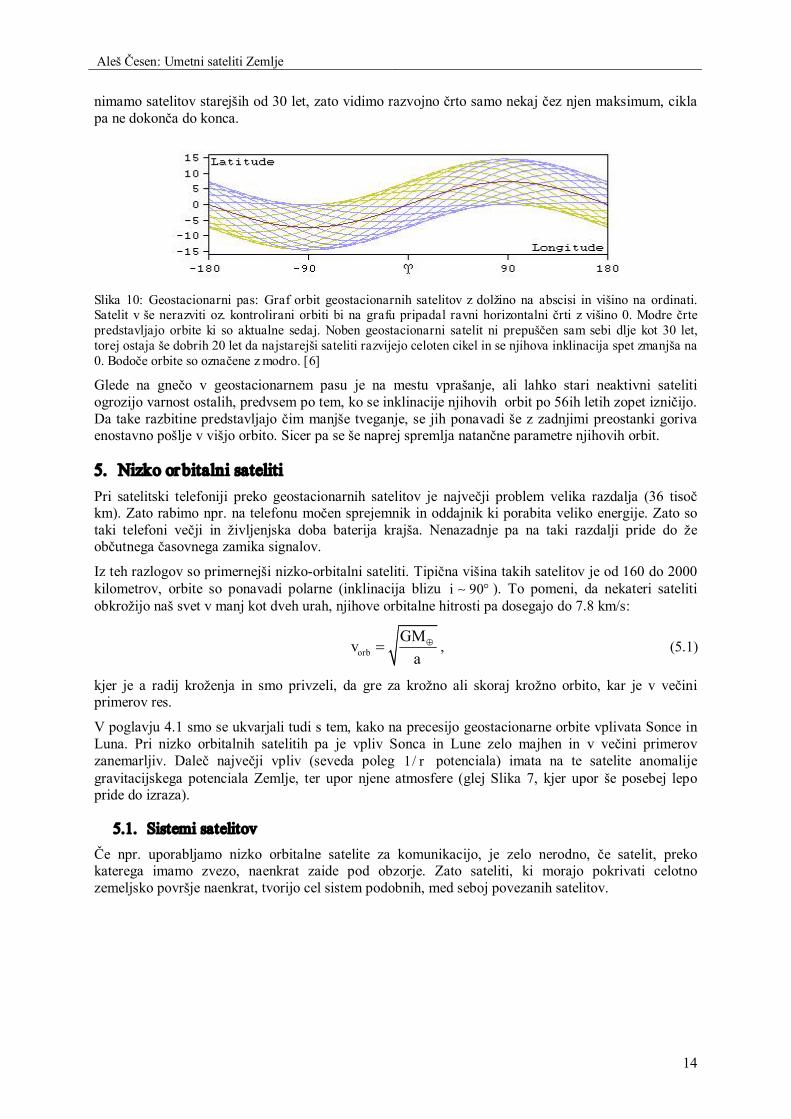
nimamo satelitov starejših od 30 let, zato vidimo razvojno črto samo nekaj čez njen maksimum, cikla pa ne dokonča do konca.
Slika 10: Geostacionarni pas: Graf orbit geostacionarnih satelitov z dolžino na abscisi in višino na ordinati. Satelit v še nerazviti oz. kontrolirani orbiti bi na grafu pripadal ravni horizontalni črti z višino 0. Modre črte predstavljajo orbite ki so aktualne sedaj. Noben geostacionarni satelit ni prepuščen sam sebi dlje kot 30 let, torej ostaja še dobrih 20 let da najstarejši sateliti razvijejo celoten cikel in se njihova inklinacija spet zmanjša na 0. Bodoče orbite so označene z modro. [6]
Glede na gnečo v geostacionarnem pasu je na mestu vprašanje, ali lahko stari neaktivni sateliti ogrozijo varnost ostalih, predvsem po tem, ko se inklinacije njihovih orbit po 56ih letih zopet izničijo. Da take razbitine predstavljajo čim manjše tveganje, se jih ponavadi še z zadnjimi preostanki goriva enostavno pošlje v višjo orbito. Sicer pa se še naprej spremlja natančne parametre njihovih orbit.
5. Nizko orbitalni sateliti Pri satelitski telefoniji preko geostacionarnih satelitov je največji problem velika razdalja (36 tisoč km). Zato rabimo npr. na telefonu močen sprejemnik in oddajnik ki porabita veliko energije. Zato so taki telefoni večji in življenjska doba baterija krajša. Nenazadnje pa na taki razdalji pride do že občutnega časovnega zamika signalov.
Iz teh razlogov so primernejši nizkoorbitalni sateliti. Tipična višina takih satelitov je od 160 do 2000 kilometrov, orbite so ponavadi polarne (inklinacija blizu 90 i ° ∼ ). To pomeni, da nekateri sateliti obkrožijo naš svet v manj kot dveh urah, njihove orbitalne hitrosti pa dosegajo do 7.8 km/s:
orb GM v a
⊕ = , (5.1)
kjer je a radij kroženja in smo privzeli, da gre za krožno ali skoraj krožno orbito, kar je v večini primerov res.
V poglavju 4.1 smo se ukvarjali tudi s tem, kako na precesijo geostacionarne orbite vplivata Sonce in Luna. Pri nizko orbitalnih satelitih pa je vpliv Sonca in Lune zelo majhen in v večini primerov zanemarljiv. Daleč največji vpliv (seveda poleg 1/ r potenciala) imata na te satelite anomalije gravitacijskega potenciala Zemlje, ter upor njene atmosfere (glej Slika 7, kjer upor še posebej lepo pride do izraza).
5.1. Sistemi satelitov Če npr. uporabljamo nizko orbitalne satelite za komunikacijo, je zelo nerodno, če satelit, preko katerega imamo zvezo, naenkrat zaide pod obzorje. Zato sateliti, ki morajo pokrivati celotno zemeljsko površje naenkrat, tvorijo cel sistem podobnih, med seboj povezanih satelitov.
Aleš Česen: Umetni sateliti Zemlje
15
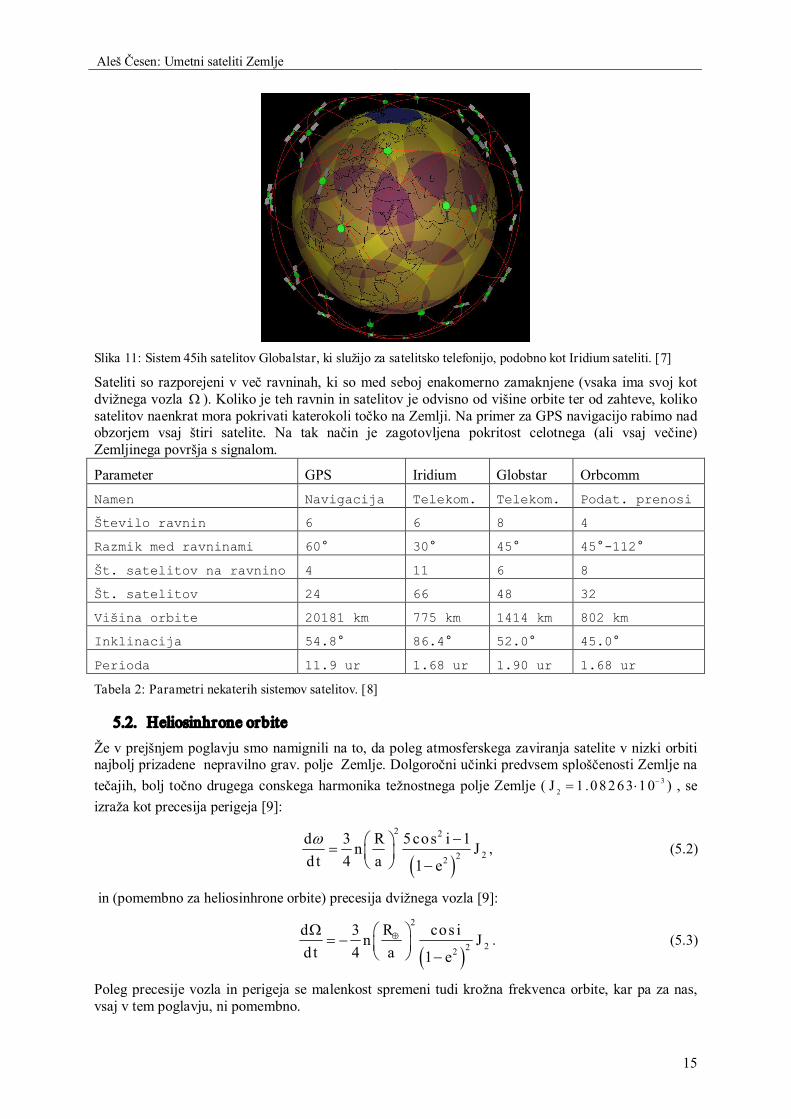
Slika 11: Sistem 45ih satelitov Globalstar, ki služijo za satelitsko telefonijo, podobno kot Iridium sateliti. [7]
Sateliti so razporejeni v več ravninah, ki so med seboj enakomerno zamaknjene (vsaka ima svoj kot dvižnega vozla Ω ). Koliko je teh ravnin in satelitov je odvisno od višine orbite ter od zahteve, koliko satelitov naenkrat mora pokrivati katerokoli točko na Zemlji. Na primer za GPS navigacijo rabimo nad obzorjem vsaj štiri satelite. Na tak način je zagotovljena pokritost celotnega (ali vsaj večine) Zemljinega površja s signalom.
Parameter GPS Iridium Globstar Orbcomm Namen Navigacija Telekom. Telekom. Podat. prenosi
Število ravnin 6 6 8 4
Razmik med ravninami 60° 30° 45° 45°112°
Št. satelitov na ravnino 4 11 6 8
Št. satelitov 24 66 48 32
Višina orbite 20181 km 775 km 1414 km 802 km
Inklinacija 54.8° 86.4° 52.0° 45.0°
Perioda 11.9 ur 1.68 ur 1.90 ur 1.68 ur
Tabela 2: Parametri nekaterih sistemov satelitov. [8]
5.2. Heliosinhrone orbite Že v prejšnjem poglavju smo namignili na to, da poleg atmosferskega zaviranja satelite v nizki orbiti najbolj prizadene nepravilno grav. polje Zemlje. Dolgoročni učinki predvsem sploščenosti Zemlje na tečajih, bolj točno drugega conskega harmonika težnostnega polje Zemlje ( 3
2 1 .08263 10 J − = ⋅ ) , se izraža kot precesija perigeja [9]:
( ) 2 2
2 2 2
3 5cos 1 4 1
d R i n J d t a e
ω − = −
, (5.2)
in (pomembno za heliosinhrone orbite) precesija dvižnega vozla [9]:
( ) 2
2 2 2
3 cos 4 1
R d i n J d t a e
⊕ Ω = − −
. (5.3)
Poleg precesije vozla in perigeja se malenkost spremeni tudi krožna frekvenca orbite, kar pa za nas, vsaj v tem poglavju, ni pomembno.
Aleš Česen: Umetni sateliti Zemlje
16
Dejstvo, da v gravitacijskem polju Zemlje dvižni vozel Ω precesira, omogoča heliosinhrono orbito, ki sicer ne bi bila izvedljiva. Pri heliosinhroni tirnici izberemo takšno kombinacijo inklinacije in višine orbite, da precesija dvižnega vozla natančno nadomešča napako zaradi kroženja Zemlje okoli Sonca. Kót med ravnino heliosinhrone orbite in Soncem se tako tekom leta ne spreminja in satelit prečka izbrano geografsko širino (npr. ekvator) vsakič ob istem lokalnem (sončnem) času.
Slika 12: Heliosinhrona orbita se vrti s Soncem. [9]
Glede na smer kroženja Zemlje okoli Sonca potrebujemo naraščanje rektascenzije dvižnega vozla Ω . Satelit v heliosinhroni orbiti se mora zato vrteti v obratni smeri vrtenja Zemlje (ima retrogradno orbito), ali z drugimi besedami, inklinacija oz. naklon orbite mora biti večji od 90°. Tipični nakloni takih orbit so med 97 i = ° in 102 i = ° , višine pa v skladu z enačbo (5.3) med 600 in 800 km [9].
Heliocentrične orbite želimo imeti npr. pri preučevanju Sonca (Yohkoh, TRACE, Hindoe) ko hočemo imeti ves čas Sonce v vidnem polju.
5.3. Ocena višine orbite iz opazovanj Nizko orbitalne satelite lahko velikokrat opazujemo na nočnem nebu. Od meteorjev jih ločimo predvsem po počasnejšem gibanju glede na zvezdno ozadje. Tipično meteorji vztrajajo na nebu le delček sekunde do največ sekunde. Satelit pa lahko potuje po nebu tudi več minut. Posebno znameniti so bliski satelitov Iridium. Gre za komunikacijske satelite z ogromnimi sončnimi celicami ki odbijajo Sončno svetlobo do opazovalca. Zažarijo lahko tudi z magnitudo 6 do 8 in so vidni tudi podnevi. Ker orientacijo sončnih panel poznamo dovolj dobro, lahko izračunamo kdaj se bo tak blisk videl iz določenih krajev. Vse te podatke si lahko pridobimo na spletni strani z naslovom: http://www.heavensabove.com/.
Slika 13: Sled bliska satelita Iridium. [10]
6 Magnituda je logaritmično merilo za svetlost nebesnih objektov v določenem spektralnem območju. Definirana je z 2.5 log( / ) ref ref M M j j = −
Aleš Česen: Umetni sateliti Zemlje
17
Določitev natančnih parametrov orbite z opazovanjem brez drage in težko dostopne opreme je zelo nenatančno in težavno. Lahko pa na hiter način ocenimo višina orbite opazovanega satelita. Problem si poenostavimo tako, da privzamemo polarno orbito z inklinacijo 90 i = ° ter da satelit opazujemo blizu zenita 7 . Taka poenostavitev je smiselna, saj je večina nizkih orbit tudi polarna, nebo pa je najbolj temno prav v zenitu. S pravo izbiro koordinatnega sistema lahko definiram krajevni vektor satelita in njegove hitrosti glede na opazovališče kot
( ,0,0) Z a R = − r , (5.4)
(0,0, ) (0, ,0) z GM a a
ω ⊕ = + v , (5.5)
kjer je a velika polos orbite satelita, oz. polmer ker imamo primer krožne orbite, z ω pa kotna hitrost vrtenja Zemlje okoli njene osi ter Z R polmer Zemlje. Drugi člen hitrosti pri enačbi (5.5) smo dodali, ker smo v vrtečem se koordinatnem sistemu. Sedaj lahko izračunamo vektor kotne hitrosti satelita glede na nas:
2
× = r v ω
r (5.6)
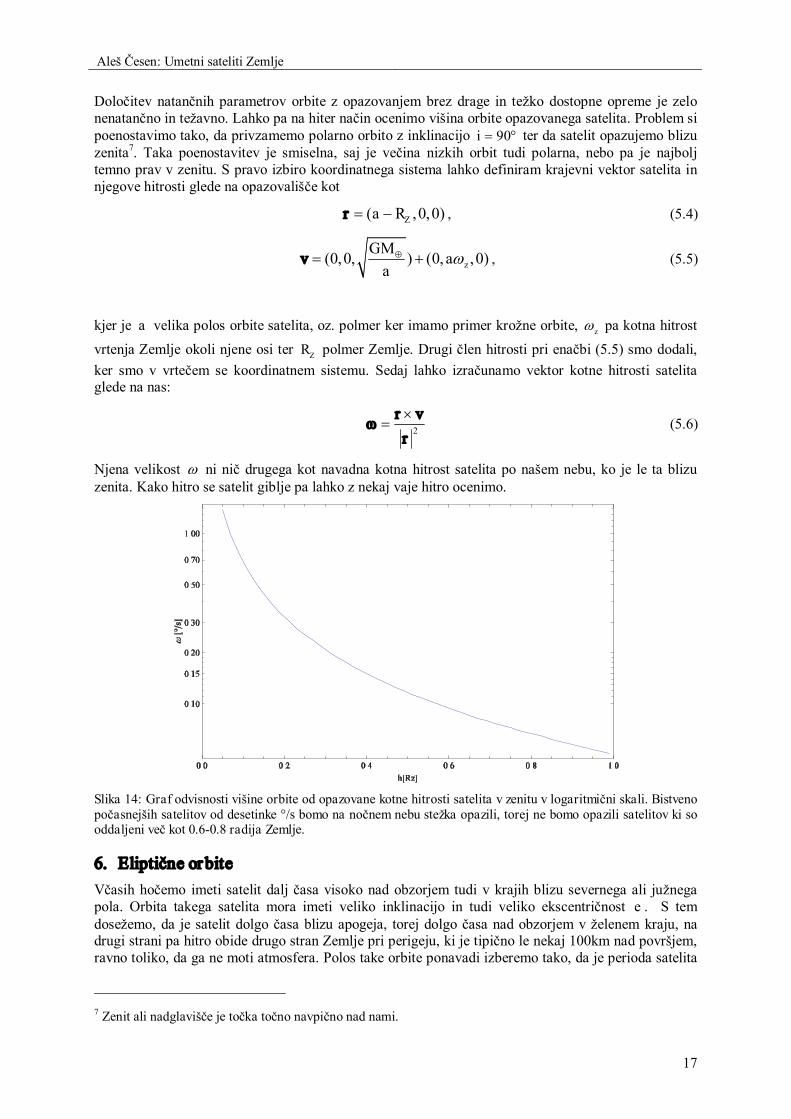
Njena velikost ω ni nič drugega kot navadna kotna hitrost satelita po našem nebu, ko je le ta blizu zenita. Kako hitro se satelit giblje pa lahko z nekaj vaje hitro ocenimo.
Slika 14: Graf odvisnosti višine orbite od opazovane kotne hitrosti satelita v zenitu v logaritmični skali. Bistveno počasnejših satelitov od desetinke °/s bomo na nočnem nebu stežka opazili, torej ne bomo opazili satelitov ki so oddaljeni več kot 0.60.8 radija Zemlje.
6. Eliptične orbite Včasih hočemo imeti satelit dalj časa visoko nad obzorjem tudi v krajih blizu severnega ali južnega pola. Orbita takega satelita mora imeti veliko inklinacijo in tudi veliko ekscentričnost e . S tem dosežemo, da je satelit dolgo časa blizu apogeja, torej dolgo časa nad obzorjem v želenem kraju, na drugi strani pa hitro obide drugo stran Zemlje pri perigeju, ki je tipično le nekaj 100km nad površjem, ravno toliko, da ga ne moti atmosfera. Polos take orbite ponavadi izberemo tako, da je perioda satelita
7 Zenit ali nadglavišče je točka točno navpično nad nami.
Aleš Česen: Umetni sateliti Zemlje
18
približno 12 ali 24 ur (pol ali en zvezdni dan). Za tak primer bi bilo idealno, če bi apogej orbite postavili točno nad sredino polarnega področja, katerega želimo pokrivati.
Naloga idealne izbire apogeja pa žal ni vedno izvedljiva zaradi precesije perigeja (glej enačbo (5.2) ).
Slika 15: Presecija perigeja. [9]
Precesija perigeja lahko že v nekaj mesecih popolnoma obrne veliko os elipse tako, da se apogej in perigej zamenjata med sabo. To pa je popolnoma nesprejemljivo za uporabo satelita na izbranem zemljepisnem področju. Precesijo perigeja pa lahko s pametno izbiro inklinacije i izničimo tako, da najdemo ničlo enačbi (5.2):
2 5cos 1 0
1 cos 5
i
i
− =
= ± (6.1)
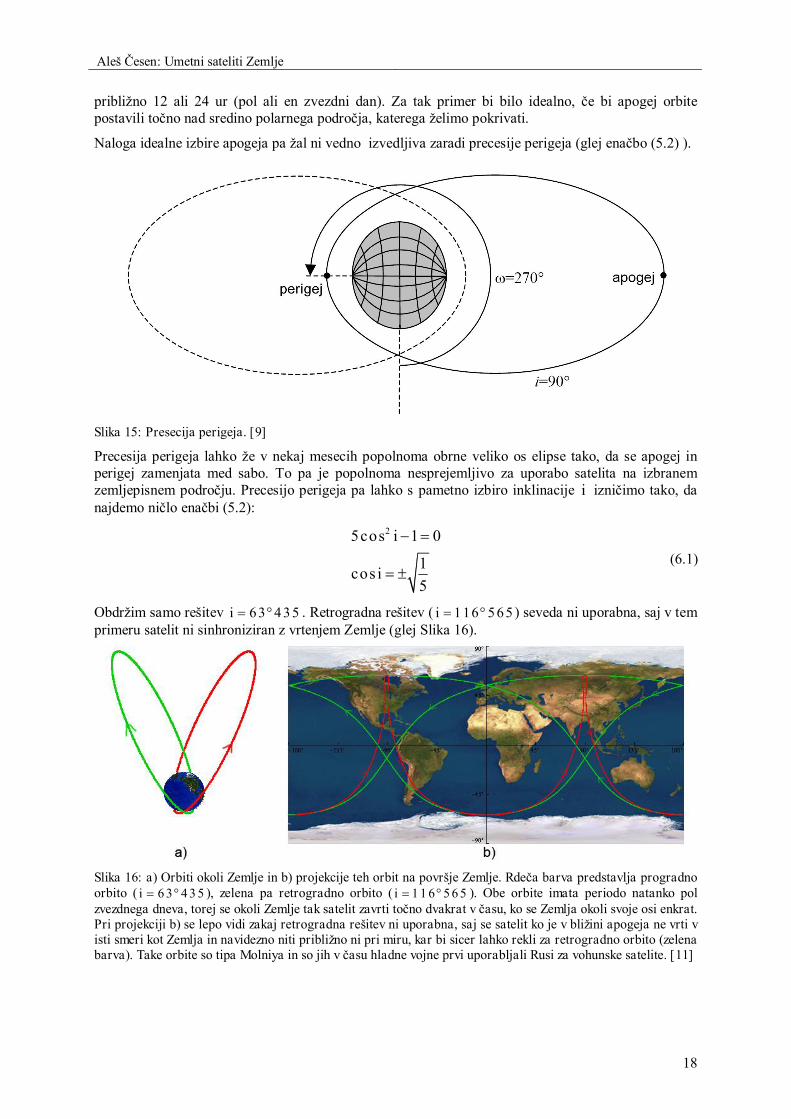
Obdržim samo rešitev 63 435 i = ° . Retrogradna rešitev ( 116 565 i = ° ) seveda ni uporabna, saj v tem primeru satelit ni sinhroniziran z vrtenjem Zemlje (glej Slika 16).
Slika 16: a) Orbiti okoli Zemlje in b) projekcije teh orbit na površje Zemlje. Rdeča barva predstavlja progradno orbito ( 63 435 i = ° ), zelena pa retrogradno orbito ( 116 565 i = ° ). Obe orbite imata periodo natanko pol zvezdnega dneva, torej se okoli Zemlje tak satelit zavrti točno dvakrat v času, ko se Zemlja okoli svoje osi enkrat. Pri projekciji b) se lepo vidi zakaj retrogradna rešitev ni uporabna, saj se satelit ko je v bližini apogeja ne vrti v isti smeri kot Zemlja in navidezno niti približno ni pri miru, kar bi sicer lahko rekli za retrogradno orbito (zelena barva). Take orbite so tipa Molniya in so jih v času hladne vojne prvi uporabljali Rusi za vohunske satelite. [11]

Aleš Česen: Umetni sateliti Zemlje
19
7. TLE (Two Line Element) V poglavju 3 smo obravnavali vrsto sil, ki vplivajo na gibanje satelita okoli Zemlje. Dejstvo je, da je vse to zelo težko upoštevati, če hočemo imeti natančno lego satelita na dolgi rok. Zato se na dnevni skali za vsak satelit objavlja elemente orbite, ki se sproti popravljajo z natančnimi meritvami teh satelitov. Taki podatki elementih orbite določenega satelita navadno najdemo na spletu v obliki dvovrstične kode TLE (Two Line Element set). Set takih elementov za npr. ameriški vremenski satelit NOAA 14 izgleda takole [5]:
1 23455U 94089A 97320.90946019 .00000140 000000 101913 0 2621
2 23455 99.0090 272.6745 0008546 223.1686 136.8816 14.11711747148495
Tako lahko za konkretni satelit izluščimo Keplerjevih šest elementov tira: 4 7232 , 8,5 10 , 272.7 , 99 , 223.2 , 136.9 a km e i M ω − = = ⋅ Ω = ° = ° = ° = °
Kot že samo ime pove, je set sestavljen iz dveh vrstic. Če štejemo znake od leve proti desni vključno z vsemi presledki lahko zapišemo tabelo ki nam pove na katerem mestu je določen podatek:
Stolpec Opis podatka 01 številka vrstice elementa
0307 številka satelita
08 Klasifikacija satelita (u=neklasificiran)
1017 Podatki o izstrelitvi (leto, številka)
1020 leto epohe
2132 epoha (dan v letu ter decimalni del dneva)
3443 prvi časovni odvod srednjega gibanja ( n & )
4552 drugi časovni odvod srednjega gibanja ( n && )
5461 Koeficient upora atmosfere (predpostavljena decimalna pika)
63 Tip efemeride
6568 Številka elementa
druga vrstica:
02 številka vrstice elementa
0307 številka satelita
0916 inklinacija orbite ( i ) (v stopinjah)
1825 kot dvižnega vozla orbite (Ω )(v stopinjah)
2733 ekscentričnost orbite ( e) (predpostavljena dec. pika)
3542 kot perigeja (ω )(v stopinjah)
4451 srednja anomalija (M )(v stopinjah)
5363 srednje gibanje ( n ) (v stopinjah na dan)
6468 število obhodov od izstrelitve do epohe
Tabela 3: Tabela TLE (Two Line Element) podatkov orbite satelitov. [12]

Aleš Česen: Umetni sateliti Zemlje
20
Kot vidimo ima vsak set elementov svojo epoho. Če računamo pozicijo in hitrosti satelita za določen čas uporabimo kodo s tisto epoho, ki je kar najbliže temu času. S tem se elegantno izognemo kompliciranih izračunov, kjer upoštevamo vse mogoče sile opisane v poglavju 3.
8. Zaključek Odkar je pred petdesetimi leti Zemljo obkrožil prvi umetni satelit se je naše življenje korenito spremenilo. Sredi prostranega Tibeta se lahko s satelitskim telefonom pogovarjamo z domačimi, vsak dan lahko pogledamo razvoj oblakov na celotni Zemljini sferi, brez problemov najdemo pot s pomočjo GPS aparata do svojega najljubšega nahajališča gob, zvečer pogledamo prenos športne prireditve in še bi lahko naštevali. Da vse skupaj brezhibno deluje pa je potrebno natančno poznavanje pozicij satelitov, tudi do centimetrov natančno. Za določanje tako natančnih pa še zdaleč ni dovolj upoštevanje 1/ r potenciala. Za uporabnika je upoštevanje vseh sil praktično nemogoče. Najbolj praktična je uporaba efemerid, najpogosteje v TLE obliki in za večino primerov nam da dovolj dobre rezultate.
9. Literatura [1] Soviet Craft: http://filer.case.edu/sjr16/advanced/20th_soviet_sputnik.html (30.12.2007) [2] Motenbruck O., Gill E.: Satellite Orbits, 2001, Springer [3] http://en.wikipedia.org/wiki/Orbital_elements (20.10.2007) [4] Prelovšek P.: Geofizika, Ljubljana 2000 (skripta) [5] Celestrak: http://celestrak.com (21.12.2007) [6] Geostationary belt: http://members.aol.com/geostat2/ (25.12.2007) [7] http://personal.ee.surrey.ac.uk/Personal/L.Wood/software/SaVi/ (5.1.2008) [8] Kidder S., Vonder Haar T.: A satellite constelation to observe the spectral radiance shell
of Earth: http://amsu.cira.colostate.edu/kidder/SatMet13_P1.1.pdf (6.1.2008)
[9] Batagelj B.: zapiski predavanj iz Satelitske komunikacije http://antena.fe.unilj.si/~lso/gradivo.html (5.1.2008)
[10] Atmospheric Based Phenomenon: http://www.rochesterastronomy.org (30.12.2007) [11] Molniya Orbit:
http://en.wikipedia.org/wiki/Molniya_orbit (6.1.2008) [12] NORAD Propagators and Two Line Element Sets: http://www.cdeagle.com/pdf/tnote2.pdf
(20.12.2007)





























